
Proyecto robot
10
Universidad Nacional De Colombia Facultad De Ingenier´ ıa Departamento De Ingenier´ ıa El´ ectrica Y Electr´ onica Taller de Ingenier´ ıa Electr´ onica 2011-II Profesores Ing. Gustavo Chica P. Ing. Jhon Reinosa V. Robot Esquivador de Obst´ aculos 1. DESCRIPCI ´ ON GENERAL El robot que aqu´ ı se presenta, es un robot que esquiva los obst´ aculos detectados mediante dos sensores infrarrojos que deben ser emplazados en la parte frontal, estos hacen el papel de ojos del robot. Es un sistema desarrollado especialmente para esta materia. La propia baquela del robot puede servir como chasis para el mismo (ver figura 1). El robot puede funcionar con 4 pilas AA (5-6VDC) o una pila de celular viejo que aporte el mismo nivel de voltaje. Es deseable que las bater´ ıas (pilas) del robot sean del tipo recargable con 1000 ´ o m´ as mAh para autonom´ ıa del robot ya que los motores DC consumen mucha energ´ ıa. Pilas, motores y sensores deben tener sus respectivos conectores y el robot debe tener un sistema de apagado. El m´ odulo debe quedar lo mas compacto posible ya que esto es parte de la evaluaci´ on del trabajo. Figura 1: Esquema general del robot 1
Transcript of Proyecto robot
Universidad Nacional De ColombiaFacultad De IngenierıaDepartamento De Ingenierıa Electrica Y Electronica
Taller de IngenierıaElectronica
2011-II
ProfesoresIng. Gustavo Chica P.Ing. Jhon Reinosa V.
Robot Esquivador deObstaculos
1. DESCRIPCION GENERAL
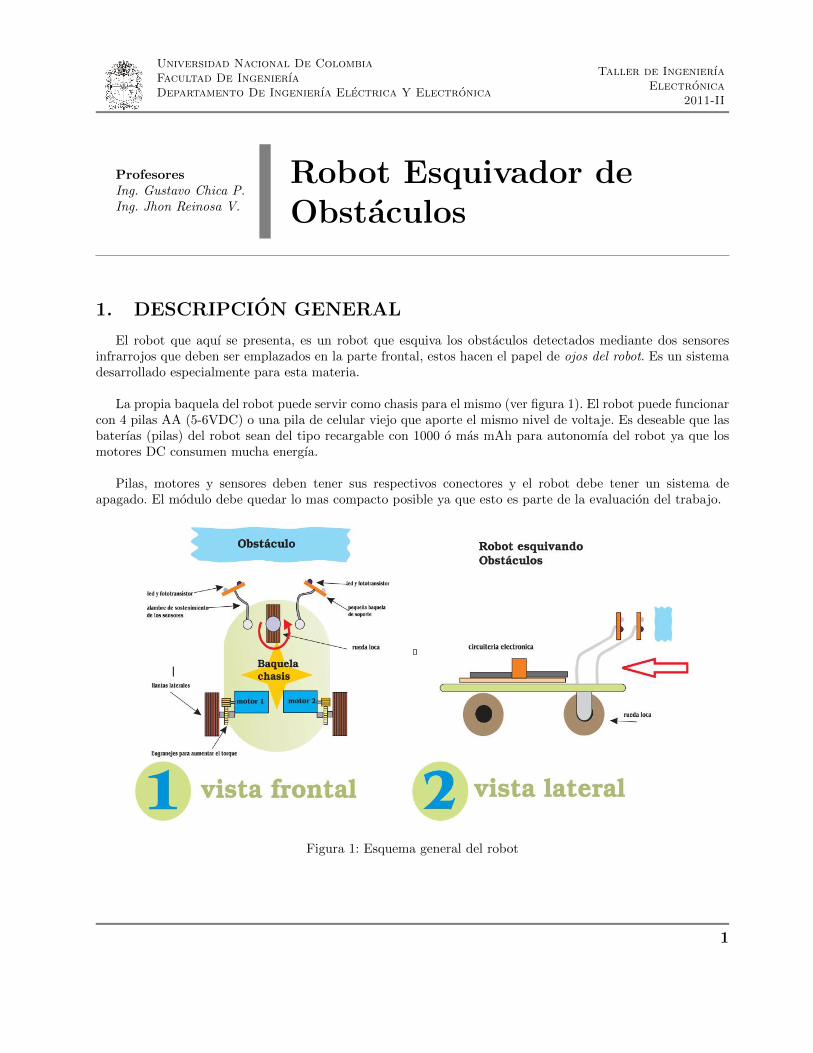
El robot que aquı se presenta, es un robot que esquiva los obstaculos detectados mediante dos sensoresinfrarrojos que deben ser emplazados en la parte frontal, estos hacen el papel de ojos del robot. Es un sistemadesarrollado especialmente para esta materia.
La propia baquela del robot puede servir como chasis para el mismo (ver figura 1). El robot puede funcionarcon 4 pilas AA (5-6VDC) o una pila de celular viejo que aporte el mismo nivel de voltaje. Es deseable que lasbaterıas (pilas) del robot sean del tipo recargable con 1000 o mas mAh para autonomıa del robot ya que losmotores DC consumen mucha energıa.
Pilas, motores y sensores deben tener sus respectivos conectores y el robot debe tener un sistema deapagado. El modulo debe quedar lo mas compacto posible ya que esto es parte de la evaluacion del trabajo.
Figura 1: Esquema general del robot
1
Universidad Nacional De ColombiaFacultad De IngenierıaDepartamento De Ingenierıa Electrica Y Electronica
Taller de IngenierıaElectronica
2011-II
2. COMPONENTES ROBOT ESQUIVADOR DE OBSTACULOS
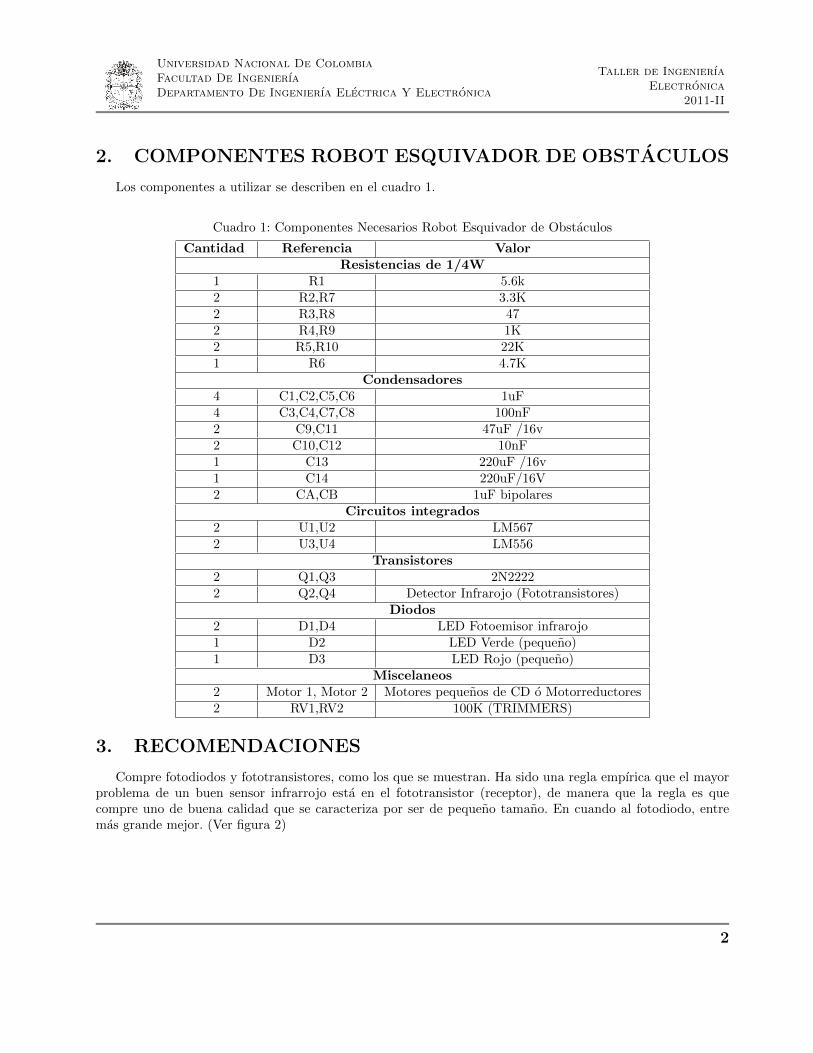
Los componentes a utilizar se describen en el cuadro 1.
Cuadro 1: Componentes Necesarios Robot Esquivador de Obstaculos
Cantidad Referencia ValorResistencias de 1/4W
1 R1 5.6k2 R2,R7 3.3K2 R3,R8 472 R4,R9 1K2 R5,R10 22K1 R6 4.7K
Condensadores4 C1,C2,C5,C6 1uF4 C3,C4,C7,C8 100nF2 C9,C11 47uF /16v2 C10,C12 10nF1 C13 220uF /16v1 C14 220uF/16V2 CA,CB 1uF bipolares
Circuitos integrados2 U1,U2 LM5672 U3,U4 LM556
Transistores2 Q1,Q3 2N22222 Q2,Q4 Detector Infrarojo (Fototransistores)
Diodos2 D1,D4 LED Fotoemisor infrarojo1 D2 LED Verde (pequeno)1 D3 LED Rojo (pequeno)
Miscelaneos2 Motor 1, Motor 2 Motores pequenos de CD o Motorreductores2 RV1,RV2 100K (TRIMMERS)
3. RECOMENDACIONES
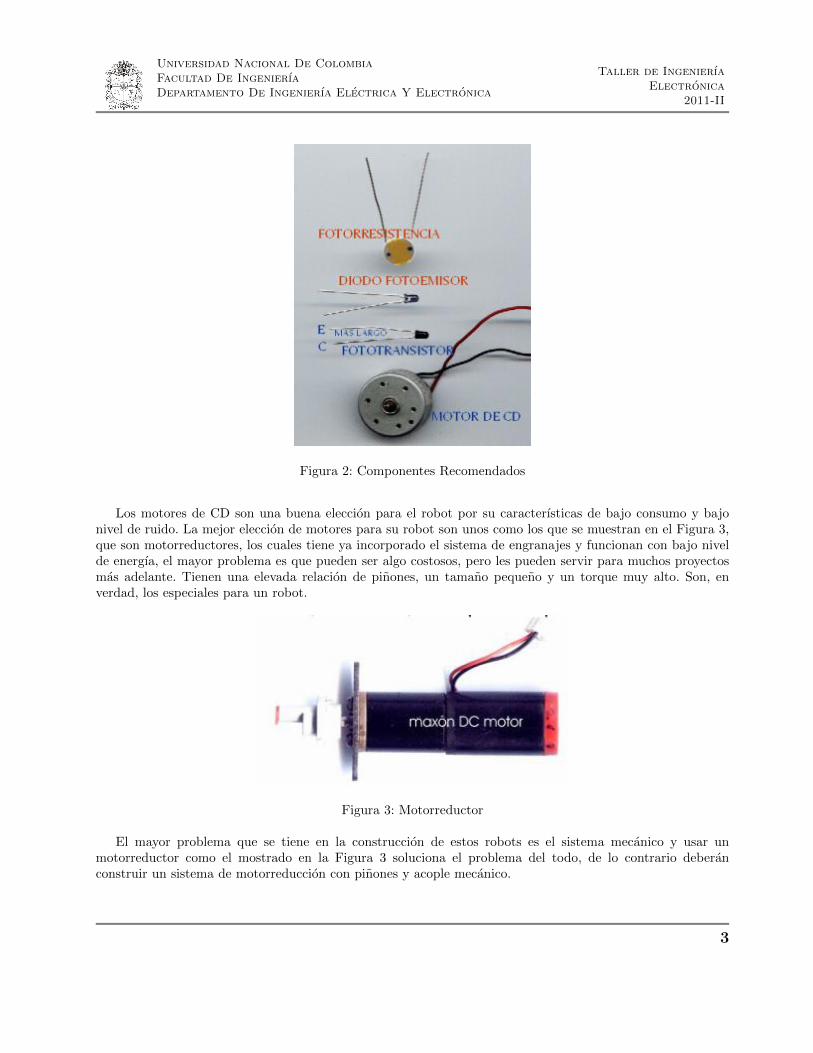
Compre fotodiodos y fototransistores, como los que se muestran. Ha sido una regla empırica que el mayorproblema de un buen sensor infrarrojo esta en el fototransistor (receptor), de manera que la regla es quecompre uno de buena calidad que se caracteriza por ser de pequeno tamano. En cuando al fotodiodo, entremas grande mejor. (Ver figura 2)
2
Universidad Nacional De ColombiaFacultad De IngenierıaDepartamento De Ingenierıa Electrica Y Electronica
Taller de IngenierıaElectronica
2011-II
Figura 2: Componentes Recomendados
Los motores de CD son una buena eleccion para el robot por su caracterısticas de bajo consumo y bajonivel de ruido. La mejor eleccion de motores para su robot son unos como los que se muestran en el Figura 3,que son motorreductores, los cuales tiene ya incorporado el sistema de engranajes y funcionan con bajo nivelde energıa, el mayor problema es que pueden ser algo costosos, pero les pueden servir para muchos proyectosmas adelante. Tienen una elevada relacion de pinones, un tamano pequeno y un torque muy alto. Son, enverdad, los especiales para un robot.
Figura 3: Motorreductor
El mayor problema que se tiene en la construccion de estos robots es el sistema mecanico y usar unmotorreductor como el mostrado en la Figura 3 soluciona el problema del todo, de lo contrario deberanconstruir un sistema de motorreduccion con pinones y acople mecanico.
3

Universidad Nacional De ColombiaFacultad De IngenierıaDepartamento De Ingenierıa Electrica Y Electronica
Taller de IngenierıaElectronica
2011-II
4. PROCEDIMIENTO PARA EL MONTAJE DEL ROBOT
A. Parte mecanica: La primera gran dificultad en la elaboracion de nuestro robot es la ya citada anteri-ormente, es decir la parte mecanica. El robot debe estar en capacidad de moverse. Normalmente esto dependede una buena eleccion del motor usado y ademas de usar una buena relacion de engranajes.
Lo primero que debe hacerse es montar la parte mecanica del motor, junto con las pilas de alimentacion yla estructura Realizado esto, conectamos el robot y observamos que se desplaza hacia delante y hacia atras confacilidad y a una velocidad aceptable. Si esto no ocurre debemos hacer las modificaciones de la parte mecanicahasta lograr este primer objetivo.
B. Sensor de proximidad: El sensor de proximidad usado es un circuito detector de frecuencia elaboradocon el integrado LM567 llamado detector de tono por razones que veremos. Este integrado sirve para detectarcuando una onda tiene una frecuencia determinada. Es decir da un nivel de voltaje alto en el pin 8 cuandopor la entrada 3 recibe una senal de la misma frecuencia que ha sido prefijada por los valores de R y C que seconectan a los pines 5 y 6. (Ver figura 4)
Figura 4: Configuracion del LM567
4
Universidad Nacional De ColombiaFacultad De IngenierıaDepartamento De Ingenierıa Electrica Y Electronica
Taller de IngenierıaElectronica
2011-II
La formula para determinar dicha frecuencia esta dada por:
Frecuencia =1
1.1 ∗R ∗A(1)
y definimos el ancho de banda, es decir el margen dentro del cual sera detectada dicha frecuencia, porejemplo una frecuencia de 1kHz con un ancho de banda de 5 % quiere decir que el integrado detectara frecuenciasde 1khz +-5 % es decir frecuencias entre:
950Hz ≤ frecuencia ≤ 1050Hz (2)
Este ancho de banda lo determina C2 (el condensador en el pin 2) y esta dado por la formula:
Anchoidebanda = 1070
√Vin
frecuencia ∗ C2% (3)
Donde Vin es el valor RMS de la onda de entrada y suponemos que Vinenmenora200mV , se introduce unaonda de pequena amplitud.
C. Prueba del LM567:
Ajuste los valores de R, C el detector de tono LM567 para que detecte una frecuencia de aproximadamente1Khz. Con la configuracion que se dice. Elija un valor de C de 100nF.
Calcule C2 para un BW del 10 %, suponiendo una entrada de 200mV.
Mida la frecuencia en el pin 5 del LM567.
Inyecte con el generador una onda de 200mV de la misma frecuencia. En este caso el LED debe estaranunciando la presencia de la frecuencia deseada.
Desplace esta frecuencia hacia una mayor, hasta que no se detecte la frecuencia. Desplacela hacia unamenor hasta lograr el mismo efecto. Calcule el ancho de banda BW.
D. Sensor de proximidad con el LM567:
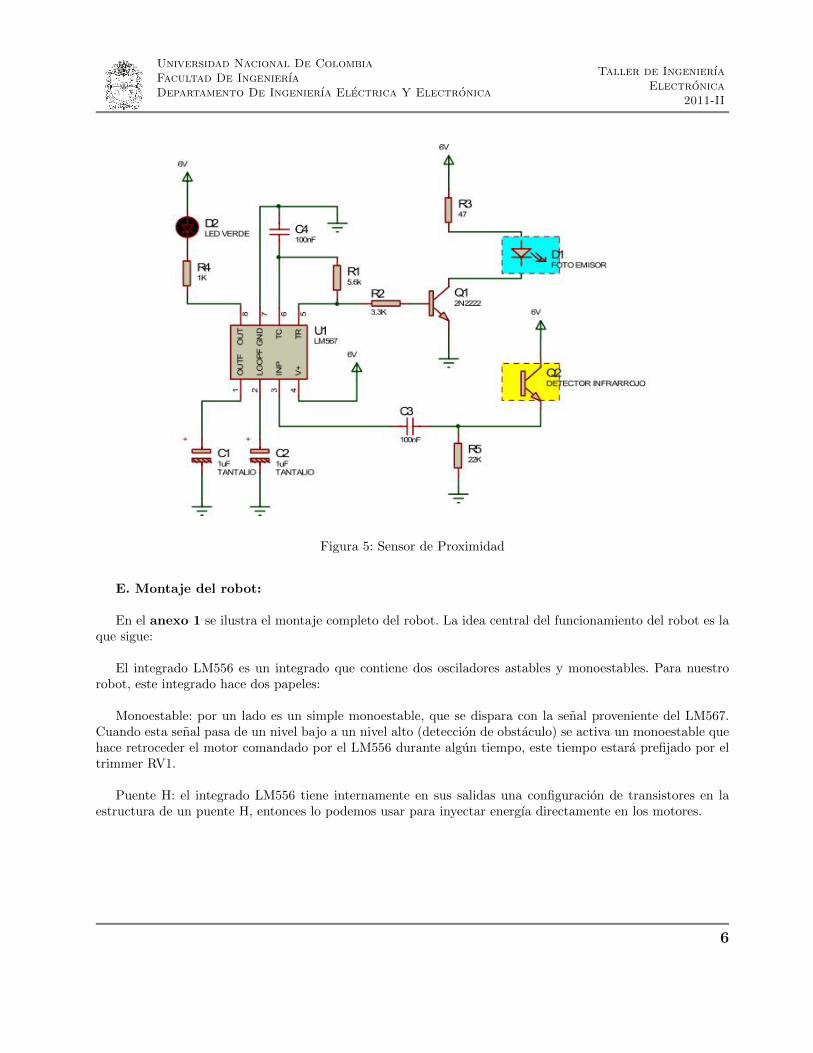
Implemente el detector de proximidad infrarrojo de la figura 5.
Coloque el fotodiodo y el fototransistor a una distancia de 2.5 cm alineados.
Mida la frecuencia en el pin 5 del LM567, mida la amplitud y la frecuencia en el pin 3 del integrado (laentrada) para 2 casos.
Se coloca un obstaculo para que el rayo rebote.
Pruebe con diferentes superficies si se detecta la proximidad de un obstaculo.
Pruebe cambiando la distancia entre los sensores, concluya.
Determine la maxima distancia que se puede detectar con su sensor. Esta debe ser mayor que 10-15cm.Algunos estudiantes mediante la consecucion de un buen foto-transistor y una adecuada disposicion dela pareja sensor-receptor han logrado distancias hasta de 40cm.
5
Universidad Nacional De ColombiaFacultad De IngenierıaDepartamento De Ingenierıa Electrica Y Electronica
Taller de IngenierıaElectronica
2011-II
Figura 5: Sensor de Proximidad
E. Montaje del robot:
En el anexo 1 se ilustra el montaje completo del robot. La idea central del funcionamiento del robot es laque sigue:
El integrado LM556 es un integrado que contiene dos osciladores astables y monoestables. Para nuestrorobot, este integrado hace dos papeles:
Monoestable: por un lado es un simple monoestable, que se dispara con la senal proveniente del LM567.Cuando esta senal pasa de un nivel bajo a un nivel alto (deteccion de obstaculo) se activa un monoestable quehace retroceder el motor comandado por el LM556 durante algun tiempo, este tiempo estara prefijado por eltrimmer RV1.
Puente H: el integrado LM556 tiene internamente en sus salidas una configuracion de transistores en laestructura de un puente H, entonces lo podemos usar para inyectar energıa directamente en los motores.
6
Universidad Nacional De ColombiaFacultad De IngenierıaDepartamento De Ingenierıa Electrica Y Electronica
Taller de IngenierıaElectronica
2011-II
5. ROBOT SEGUIDOR DE LUZ
Como asignacion se deja cambiar el circuito y los sensores del robot y con la misma parte mecanica realizarel robot seguidor de Luz.
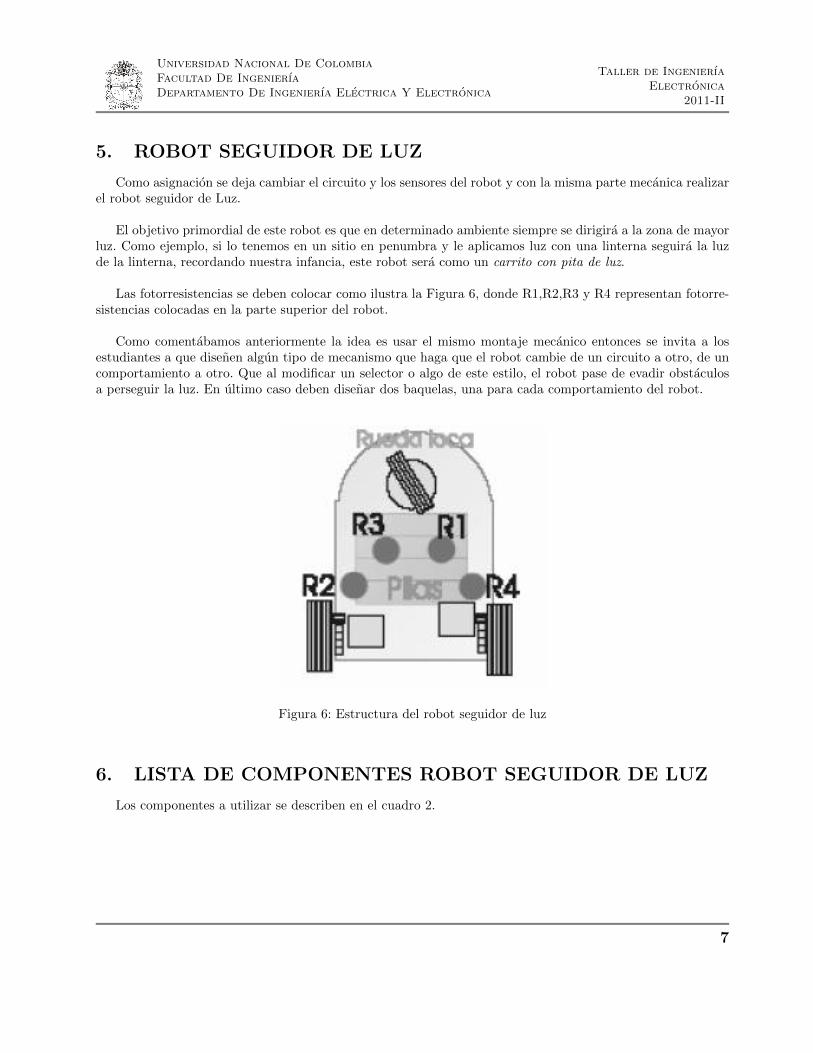
El objetivo primordial de este robot es que en determinado ambiente siempre se dirigira a la zona de mayorluz. Como ejemplo, si lo tenemos en un sitio en penumbra y le aplicamos luz con una linterna seguira la luzde la linterna, recordando nuestra infancia, este robot sera como un carrito con pita de luz.
Las fotorresistencias se deben colocar como ilustra la Figura 6, donde R1,R2,R3 y R4 representan fotorre-sistencias colocadas en la parte superior del robot.
Como comentabamos anteriormente la idea es usar el mismo montaje mecanico entonces se invita a losestudiantes a que disenen algun tipo de mecanismo que haga que el robot cambie de un circuito a otro, de uncomportamiento a otro. Que al modificar un selector o algo de este estilo, el robot pase de evadir obstaculosa perseguir la luz. En ultimo caso deben disenar dos baquelas, una para cada comportamiento del robot.
Figura 6: Estructura del robot seguidor de luz
6. LISTA DE COMPONENTES ROBOT SEGUIDOR DE LUZ
Los componentes a utilizar se describen en el cuadro 2.
7

Universidad Nacional De ColombiaFacultad De IngenierıaDepartamento De Ingenierıa Electrica Y Electronica
Taller de IngenierıaElectronica
2011-II
Cuadro 2: Componentes Necesarios Robot Seguidor de Luz
Cantidad Referencia ValorResistencias
4 R1, R2, R3, R4 Fotoceldas iguales de zona amplia (grandes)4 R5,R6,R7,R8 1K1 R9 2.2K
Condensadores2 C1,C2 220uF/16V2 CA,CB, 1uf bipolar , no electrolıtico
Circuitos integrados2 U1,U2 LM5561 U3 LM324
Los motores y demas componentes de la parte mecanica se preservan del esquivador de obstaculos.
En el anexo 2 se ilustra el montaje completo del robot seguidor de luz.
8
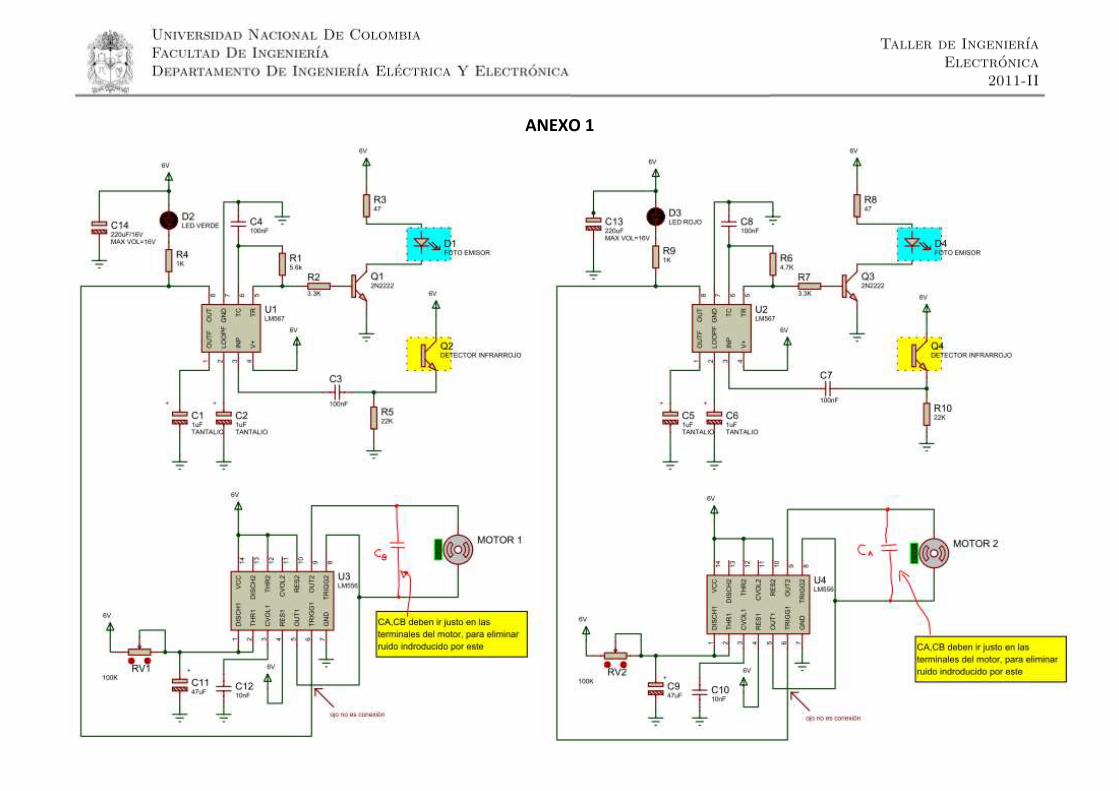
ANEXO 1
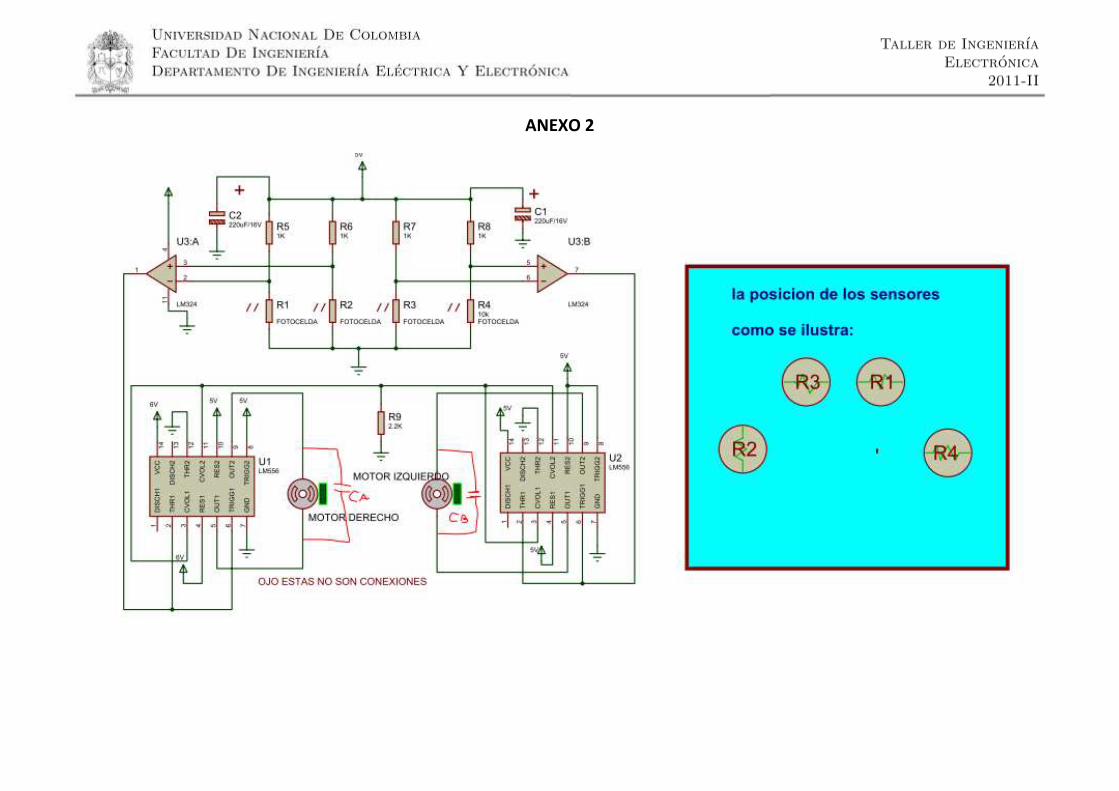
ANEXO 2




















