
ABSTRACT - TU Delft Repositories
100
ABSTRACT THE PREDICTION OF THE SHIP'S MANEUVERABILITY IN THE DESIGN STAGE By: Dr. J.P. Hooft, member and Dr. U. Nienhuis, MARIN, Wageningen TECHNISCHE UNIVERSITEIT LabOratoijurn voOt 8homecta tchet Mekelweg 2, 2628 CD Delft TeL O15.78 This paper contains the evaluation of the ship's maneuverability in the design stage during, which the underwater hull form and the äppendages are to be determined. For this purpose two basic aspects in the assessment of the ship's maneuverability are discerned, i.e. (1) the determination of the influence of the hull form and of the appendages on the ship's hydrodynamic phenomena such as added mass and damping coefficients, and (2) the determination of the effect of the hydrodynarnic aspects on the ship's maneuvering properties. This second aspect will be elucidated by means of computer simulations which are applied for predicting the ship's maneuverability in the design stage. In the paper information will be given first about the hydrodynamic aspects by which the forces are generated on the hull in reaction to the ship's motions while maneuvering. After that the forces will be described which are caused by the rudders. Having determined all relevant hydrodynamic quantities, then the ship's maneuverability can be predicted by using computer simulations. Results from such simulations will be shown in. comparison to model test results and to full scale trial resUlts.
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of ABSTRACT - TU Delft Repositories

ABSTRACT
THE PREDICTION OF THE SHIP'S MANEUVERABILITY
IN THE DESIGN STAGE
By: Dr. J.P. Hooft, member and Dr. U. Nienhuis,
MARIN, Wageningen
TECHNISCHE UNIVERSITEITLabOratoijurn voOt
8homectatchet
Mekelweg 2, 2628 CD DelftTeL O15.78
This paper contains the evaluation of the ship's maneuverability in the design stage during, which
the underwater hull form and the äppendages are to be determined. For this purpose two basic
aspects in the assessment of the ship's maneuverability are discerned, i.e. (1) the determination
of the influence of the hull form and of the appendages on the ship's hydrodynamic phenomena
such as added mass and damping coefficients, and (2) the determination of the effect of the
hydrodynarnic aspects on the ship's maneuvering properties. This second aspect will be
elucidated by means of computer simulations which are applied for predicting the ship's
maneuverability in the design stage.
In the paper information will be given first about the hydrodynamic aspects by which the forces
are generated on the hull in reaction to the ship's motions while maneuvering. After that the
forces will be described which are caused by the rudders.
Having determined all relevant hydrodynamic quantities, then the ship's maneuverability can be
predicted by using computer simulations. Results from such simulations will be shown in.
comparison to model test results and to full scale trial resUlts.

1. INTRODUCTION
In the design stage of a ship all its dimensions and those of the appendages are considered with
respect to the consequences ori the various aspects of the ship's performance such as the
powering, the sealoeeping and the maneuverability. The result of the optimization of the design
is a compromise of each of the components of the total performance.
In literature a lot of information is available to establish the influence of the hull forni on the ship's
powering (resistance and propulsion) and on the ship's dynamic behavior in a seaway (the
so-called seakeeping properties). Therefore in this paper the attention will be focused on the
influence of the ship's hull form and its appendages on the maneuverability.
One of the serious problems in designing the hull form from a point of view of maneuverability
is caused by the uncertainty in specifying the maneuvering performances which have to be
satisfied. Depending on the ship's mission various types of maneuvers have to be performed each
of which are difficult to define let alone to describe. In addition to this problem the assessment
of a maneuver depends on the ship's type (defined by its form) which is affected largely by its
mission and the environment in which it operates. Examples of completely different ship types
which perform completely different maneuvering tasks are: freighters, tugboats, minesweepers,
etc. In Section 2 the various aspects of the maneuvering performance will be discussed in detail.
Some of the above problems with respect to the definition of the ship's maneuverability in the
design stage have been solved for a large category of ships by the 1993 1MO regulations; see
1MO 1993. In these regulations the following aspects were specified:
1. The types of maneuvers on which the maneuverability of new ships longer than 100 m will
be judged, and
-2-

2. The limits within which the maneuvers have to be executed.
The 1MO regulations also require that in the design stage predictions are to be performed to prove
that the ship's maneuvering performance will comply with the 1MO criteria. lt is required also that
the predictions have to be validated by the results of sea thäls with the new ship. In this respect
still some serious pròblems exist about (1) the reliability of the prediction method, and (2) the
accuracy of the sea trial results. These two problems will b elucidated as follows:
Reliability of the, prediction method
Various types of prediction methods exist such as e.g.
extrapolation from past experience; in this method the maneuvering characteristics, are
predicted by means of empirical descriptions between the maneuvering properties measured
during sea trials and the ship's dimensions;
computer simulations using'hydrodynamic cOefficients derived from an empirical relation. with
the ship's dimensions;
experiments with self propelled ship models;
computér simulations using hydrodynamic coefficients derived from experiments with ship
models restrained to a towing carriage (often referred to as PMM tests).
The reliability of a prediction method depends mainly on the following two items:
The method is defined to be reliable if the prediction result has proven to be in agreement
with resUlts from other (mainly experimental) methods to ascertain' the ship's maneuverability,
especially so from sea trials.
lt shòuld be realized that there will always be some error bandwidth in the results of each of
these prediction methods. That means that small changes in the input parameters will shov
a variation in the result of the method. The method is defined to be reliable if also the
variation in the results will be small for small changes in the input.

The accuracy of the sea trials
lt is assumed that it wiN be possible nowadays to measure the various maneuvering properties
(rudder angle, ship's position, speed and rate of turning) rather accurately. However the recording
of these items and of the conditions of the ship and the environment are often less
conscientiously performed. This can be indicated by the foliowing examples of problems in
recording precisely the needed information;
The ship's behavior before the start of a test maneuver (e.g a turning circle or zig-zag
maneuver) can have a large impact on the maneUver considered. lt is therefore
recommended to record the ship's behavior well in advance of the official beginning of the
maneuver.
The ship's maneuverability will be influenced largely by its loading condition. Mostly only the
draft and the trim will be recorded. HoWever for various types of ships also the metacenter
height will affect the maneuverability. Therefore this item should also' be taken into
consideration.
The accuracy of the rudder angle and the ship's course angle should be given prime
attention. For an optimal recording of these items elaborate calibrations should be carried out.
The enviionmental conditions can have a significant influence on the tship's maneuvering
properties. These conditions should therefore be recorded appropriately.
Even when due attention ¡s given to thè recording of all aspects relevant to maneuvering tests
then still some degree of inaccuracy in the results of the sea trials have to be accepted because
of the fact that the tests can never be executed under loo % ideal circumstances. This means
that when considering the hypothetical case of, a large number of identical tests under identical
circumstances then the measurements will be defined to be accurate ¡f and only if the deviation
in the results óf all tests remains relatively small (e.g. 5%).'
-4-

BASIC MANEUVERING PROPERTIES
When considering the ship's maneuverability as an open loop system then the following aspects
can be discerned:
1. The attainability by which the inherent maneuvering performance of the ship is defined. This
aspect describes the complete set of maneuvers that can be performed by all possible rudder
executions for all environmental conditions. Mostly one only defines the attainability for a
subset of conditions such as for example the maneuverability in deep water at the service
speed.
2.. The (coUrse) stability according tö the following definition; see also FIgure 1: "At a constant
position of the steering systems (rudders, thrusters, etc.) the ship is defined to be course
stable if after some short disturbance it will resume the original maneuver without any use of
the steering means". Mostly only the stability on a straight course is considered with the
rudder in the equilibrium position.
The sensitivity according to the following definilion: "The sensitivity S of the ship's
maneuverability to external variations is defined by the ratiò of the relative change óT/T of
the maneuvering performance T in comparison to the relative disturbance &/a of any
parameter a that has an effect on the maneuverability".
COURSE StASLE
Rate at turning
-5-
COURSE UNST.ABLE
Rate ot turning r
N\
Fig. 1. Definition of the course stability from the results of the spiral test.
width aihysteresis4
height öthysteresis
rudder angle &

Table 1. 1MO maneuvering criteria for ships longer than loo m
From the turning circle maneuver:* TURNING ABILITY AT 35 ÓEG RUDDER ANGLE
- advance < 4.5 L
- tactical diameter < 5 L* COURSE INITIATING ABILITY AT 10 DEG RUDDER ANGLE
- travelled distance < 2.5 L at lo deg change of heading
From the zig-zag maneuver:* COURSE CHECKING ABILITY
- lo/lo Z-maneuver
first overshoot < lo deg if Lpp/U < i O sec
first overshoot < 20 deg if LpdU.> 30 sec
first overshoot: (5 + ½*L/U) for 10 sec < LWU <30 sec
second execute <first overshoot + 15 deg
20/20 maneuver
first overshoot < 25 deg* STOPPING ABILITY
track reach < 15
The attainability is öonsidered ¡n order to ascertain the area that is needed by the ship while
executing its mission which consists for instance of accelerating, course keeping (and sometimes
also track keeping), course changing, course checking, stopping, etc.
För the assessment of the maneuverability of a seagoing vessel longer than 100 m the 1MO 1993
has specified four maneuvérs which have to be executed within certain limits; see Table 1. Apart
from the stopping there are basically two types of maneuvering properties considered by the 1MO
critèriá:
-6-

i
The ability to change the heading of the ship by mean.of the available steering systems: the
so-called "course changing ability" of thè ship. This aibillty is determined from the first part of
the turning circle maneuver (see Figure 2) at 35 deg and 10 deg rudder angle. lt will be
obvious that the safety of the ship is good if it is possIble to initiatô rapidly a change of
heading in order to avoid a suddén obstacle.
The ability to bring the ship on a straight course from the condition in which it is turning: the
so-called "course chécking ability". This ability is deterrn med by the overshoot angle and
overshoot time in the zig-zag maneuver; see Figure 3. In case that the ship is turning and will
continue to turn for some time in the same direction after the rudder has been put. in the
opposite direction then it will be obvious that one considers the ship to be out of coñtrol if the
time of vershoot is too large. lñ that òase thé ship's rnaneuver during such an excessive
overshoót time will seem to proceed independent of thé rudder action. Therefore, it will be
beneficiai for the ship's safety when it càn be kept under control properly by responding
quickly to the steering means without too much overshOot.
uC'U
Tactical diameter
o
Track of centro atPosition et Oat rudder execute reference O
Dritt angle
6
i st
SecondA
overshoot Iañ9ló 'I
Period
2nd 3rd
First overshoot angie
First overshoot lime
angle c
Time
Ruddorangle 6
Second overshoot Urne
4th rudder-execute
Fig. 2. Description of the turning circle maneuver. Fig. 3. Dèscription of the zig-zag maneuver.

Various aspects of the ships maneuvering performance such as the ucourse keoping, the "course
changing" and the "çourse checkirig are influenced significantly by the ship's course stability
according to the above given definition:
- Course keeping: According to the definition a course unstable ship with the rudder in the
equilibrium position wiH immediately start to turn after any disturbance. Therefore, in order to
keep the ship on a straight course continuous rudder actions are required to. correct for the
continuous disturbances. A course stable ship with the rudder ¡n the equilibrium position will
not continue to turn after a short limited disturbance. However, after the disturbance has
vanished the course of the ship will have been altere4. To restore the course deviation
continuous rudder actions are also needed to keep a course stable ship on a straight course.
No general conclusions can be drawn about the difference in rudder activity in the course
keeping of a stable ship and that of a course unstable ship.
Course chanQing: In case of a course stable s.hip it will be m'ore difficult to introduce ¿ change
of course. Large rudder forces have to be applied to generate an adequate rate of turning
frörn..a straight course. However, in case of a course unstable ship the ship will start to
deviate from a straight course, easily at appreciably high rates of turning with only relatively
small rudder forces.
Course checking: In case of a course stable ship the ship will have a natural tendency to stop
turning and to resume to sail along a straight course in the absence of any disturbance.
Therefore a course stable ship will have a good "course checking ability" irrespective o the
rudder effectiveness. lt should be noted however that sometimes larger rudders are required
to rnak.e the ship course stable; see Section 6. In case of a course unstable ship it will be
quite cumbersome to stop the turning rate once the ship has started to turn. Therefore, an
insufficient course checking ability is mostly caused primarily by the course instability for two
reasons: (1) the course unstable ship will turn quite fast which is more difficult to be
counteracted, and (2) the course unstable ship is inherently more inclined to turn and it
therefore requires more effort to stop this tendency. For a course unstable ship large forces
-8-

will be required by the reversed rudder angle ¡n order to stop the ship's turning and bring her
on à straight course. Large rudders will be required in this case (1) to make the ship course
stable and (2) to achieve an acceptable course checking ability". If the ship is course
unstable while large rudders háve already been applied then there are two reasons to apply
stabilizing fins instead of further increasing the rudders, Le.
with larger rudders the turning rate of the ship might become unacceptably large by which
it will become even more difficult to stop the turning of the ship, and
during the deceleration procedure the rudder effectiveness might be reduced drastically
while fins will Still remain appropriately effective (see also Section 6).
Taking into account the above consideratjons then it sometimes happens that the maneuverability
of a course unstable ship may still be acceptable if the following two criteria are satisfied; see e.g.
the 1MO 1991 document:
The rate of turning at the equilibrium rudder position should remain within acceptable limits;
see e.g. ITTC-'87. Such a limit is for instance about 30% of the turning rate at the maximum
rudder angle. From Figure 1 it is seen that the rate of turning at the equilibrium rudder
position corresponds to half the height of the hysteresis in the relation r(6) betweèn the
turning rate and the rudder angle if the ship is course unstable. -
The tüming at the equilibrium rudder position should be stopped by means of opposite rudder
angles of limited amount; see e.g. Nomoto (1977). Such a limit is for instance a rudder angle
of 5 degrees. From Figure 1 it is Seen that the rudder angle at which the turning can be
reversed corresponds to half the width of the hysteresis ¡n the relation r(8) between the
turning rate and the rudder angle if the ship ¡s course unstable.;
If these two criteria (which have not beén incorporated by the 1MO) are satisfied then it may
happen that this typé of course unstable ship falls in the category of good controllable ships. lt
is difficult to explain theoretically why such a ship is considered to be good còntroflable. However

from a practical point of view it is assumed that a ship with a limited course instability will respond
easily to any outside force and therefore also to any rudder action In Sections 3 and 4 a
derivation will be given about the hydrodynamic origin of the course stability..
In order to assess the ship's maneuverability aiso the sensitivity to variations according to the
earlier given definition has tobe considered in additiòn to the above shown aspects of attainability
and stability. Examples of variable parameters which may affect the maneuverability are:
- steering devices
- loading condition of the ship
- environmental conditions.
For a proper assessment of a system it is required that it is quite insensitive to variations of all
kinds of nature. A system is considered more reliable when its sensitivity to variations of the
influencing parameters is small. A low sensitivity, of the maneuverability of a ship will make, the
maneuverability of that ship much more acceptable because of the increased reliability to the ship
operator and to the certifying authority.
With respect to the certification of the ship's maneuverability:
If the maneuverability ¡s very sensitive to external disturbances then this will cause large
variations in the maneuvering performance measured during various trials Under nearly equal
circumstances. This means that if the maneuverabIity is sensitive to the circumstances then the
maneuverability can not be measured with great accuracy. In that case orle will not only find that
there is no coherency in the trial results but also that the agreement will be small between the
full scale trial results and the predictions from eithér model tests or computer simulations.
Therefore it will be quite unreliable to determine whether the maneuverability will satisfy the
criteria and thus will be acceptable or not.
-lo-

With respect to the controllability of the ship:
If the maneuverability is insensitive to external disturbances then the ship's operator (either
captain or pilot) will remain confident about the consequences of his contrôl actions. In that case
no continuous corrections have t be applied to realize the maneuver as anticipated.
For a large category of ships the maneuverability will be notably sensitive to variations in all kinds
of parameters. Two examples öf such sensitivities are:
- The maneuverability of containerships may vary with the metacenter height; see e.g. Oltmann
(1993). If the standard maneuvers were performed at a large MG. then the maneuverability
may satisfy the 1MO criteria. However, it may then occur that the maneuverability, will be
unacceptable in the normal operation condition at which the MG value will be much smaller.
The maneuverability may be influenced significantly by the trim of the. ship; seO e.g. Kijima
(1993) whø presents some results frOm 10/10 and 20/20 zig-zag maneuvers as a function of
the trim conditiòn. lt is strongly recommended to determine the trim as accurately as possible.
In general the sensitivity of the maneuverability is independerit of the course stability. However,
it appears that the maneuverability of long slender ships -which are course stable- are quite
insensitive to disturbances. On thé opposite, the maneuverability of short fat ships -which are
course unstable- appear to be quite sensitive to disturbances.

MATHEMATICAL.DESCRIPTION OF THE SHIPS MANEUVERABILITY
In this section the set-up Will b discussed of the mathematical model describing the
hydrodynamic phenomena which influence the ship's maneuverability. Such a mathematiçai model
is used in computer programs by means of which the ship's maneuverability can be simulated;
see e.g. Barr (1993).
When all relevant phenomena affecting the ship's maneuverability have to be taken into account
then a quite extensive mathematical model will be required. However, from a practical point of
view, the mathematical modél should be kept as simple as possible. Generally two criteria are
regarded to establish the extent of a. mathematical model with respect t the number of coupled
motions (degrees óf freedom) and the range of motions for Which the equations are still valid.
These criteria are: -.
The availability of accurate and extensive information about the hydrodynamic aspects
influencing the ship's behavior; only simple mathematical models (e.g. linear models) can be
arranged When little is known about the effect to be simulated.
Theôomplexity of the problem. to be solved by means of the simulation. The mathematical
model can be kept simple if only rough descriptions of the ship's behavior (e.g. the initial
stability or the controllability on a straight course) are needed or if. only rough indications are
required about the influence of some environmental óffect on the ship's maneuverability.
The simplest mathematical description of the ship's maneuverability was originally presented by
Nomoto (1957) and consists of a single differential equation describing only the ship's turning
ability. Davidson and Schiff (1946) described the drifting and turning performance by a two
degrees of freedom system consisting of linear terms only. The next extension consists of the
inflLence of the ship's forward speed on the transverse force and the yawing moment in
combination with the effect of the sway and the yaw on the longitudinal force. Such an influence
-12-

of the drifting and the turning on the longitudinal force can be so significant that the ship's Speed
in a turn might decrease to only 30% of the approach speed. This three degrees of freedom
system appears to be quite eff ective to describe the maneuvèririg performance of a large category
of ships; see e.g. Norrbin (1971), ¡noue (1981), Ankudinov (1993) and many others. Ships with
small MG values will roll during the maneuvering ¡ri the horizontal plane by which the surge and
sway force and the yawing moment are affected arid therefore also the ship's maneuverability.
In that case the ship's maneuvering behavior should be described, by a set of four coupled
equations of motion; see e.g. Eda. (1 980), Hirano (1980) and Oltmann(1 993).
When also the ship's sinkage and trim variations affect th rudder force and the hull reaction
forces while maneuvering (such as e.g. for SWATH ships) then the ship's maneuverability should
be déscribed by the complete set of six coupled equations of motions. This 6 DOF dscription
is also required fór the description of the ship's maneuverability in waves; see e.g. Ankudinov
(1983) and Hooft and Pieffers (1988).
Inmost time domain computer simulations a conti.nuoùs evaluation is perfòrmed of the dynamic
variation of the various motion componentS. These motions are basically derived from Newton's
differential equations of motion; see e.g. Hóoft (1986):
dt2IMI-1.
in which:
= à(t) = acceleration of the generalized motion § as a function of time
= (x,y,z.,4,O,)' = the generalized motiOn
È = (X,Y,Z,K,M,N) = the generalized force
1Ml =massmatrix
t =time.
-13-
(3.1)

The force and mass in relation (3.1) depend on many factors such as the position s(t) and velocity
y ( ds/dt) óf. the ship, the actions of the steering devices, the environmental conditions, etc. lt
Will be ôbvious. that all these factors may vary in time. Therefore proper knwlede abäut the
relation between the influencing factors and the resulting force or mass components will bé
required at any moment of time for an accurate derivation of the momentaty accelerations in Order
to reach a reliable simulation of the ship's performance.
When neglecting the inflUence of the heel angle then the description of the shIp's maneuverability
in still water follows from the following reduction of equation (3.1.):
These differential equations of the motions are defined relative to the ship fixed coordinate system
through th ship's center. of gravity. The force F (Xt,Y,N1), is partiy dependent on the ship's
acceleration. This part is, defined by the added mass coefficients m = -X, m =
m, -Y, m. = -N and my,. = -N. lt is assumed that these coefficients remain independent ol
other factors such as the ship's position and velocity or the environmental conditions of wind,
waves and current.
In general the added mass coefficients can be predicted rather accurately. In the Initiai design
stage empirical methods are availàble to determine these coefficients as a function of the main
dimensions of the ship; see e.g. Motora (1960), Soding (1982) and hIC (1984). In a further stage
of the design these coefficients can be determined more accurately by means of two-dimensiónal.
(stripwise) or thtee-dirnensionai analytical methods based on potential flow 'theories; see eg.
Oortmerssen (1976). It:should be noted that. in general it is not necessary to determine the added
-14-
m.(du/dt -r.v) =X (3.2)
m. (dv/dt + r.u) .= Yt (3.3)
l.dr/dt (3.4)

mass coefficients very accurately. This is due to the fact that the results of the computations will
not be influenced very much by variations in the amount of the added mass coefficients. From
these considerations ¡t is concluded that no further attention is needed here to the derivation of
the added mass coefficients.
In the case of constant added mass coefficients then equations (3.2) to (3.4) are rewritten as
follows:
Thèse equations dèscribe the generation of the ship's motions by the generalized force
F (X,Y,N). It consists of (1) the excitation force by the., rudder, the propeller and the
environmental phenomena such as wind, waves and current in addition to (2) the hydrodynamic
reaction (damping) force on the hull. For a proper analysis of each of the above aspects on the
ship's maneuverability during the design process use is made of the modular description:
-(X,Y,N) 'IH + +FR +FE . (3.8)
with the following notation:
FH - being the hull forces; see Sections 4 and 5
F - being the forces excited by the propeller(s)
FR - being thé forces excited by the rudder(s); see Sections 6 and 7
FE - being the forces generated by environmental phenomena.
With the equations (3.5) to (3.7) the simulation statts at an. initial position of the ship in which the
externalforce F(t1=O) is known. At this moment of time the acceleration a. (du/dt,dv/dt,dr/dt) is
- -15-
(m + m)du/dt - m.r.v + X (3.5)
(m + m)dv/dt + m.dr/dt = -m.r.0 +'( (3.6)
dv/dt + (' + mr.r).. dr/dt = N (3.

determined from the solution of the above coupled equatiOns. From an integration one finds the
velocity components u, v and r along the ship fixed coordinate System through the center of
gravity:
u(t) = u(t-O) + j'.4t (3.9)
v(t) = v(t»O) + -th (3,10)
r(t) r(t'O) + f.. dt (3.11)
When assuming that all force components are described in some reference point O (often taken
amidships) then the excitation force F(t2=t) at the next moment of time is determined as follows:
First the velocitycomponents u0 = u and y0 = v-x.r are established in the reference point O with
XG being the distance of the center of gravity ¡n front of the reference point O. With these
velocities the force F0 ¡n the reference point O is determined using the formulations that hold for
this point. The fórce F in the center of gravity is then determined by:
XX0; Y=Y0; N =N0 -X0.YQ (3.12)
With these forces at the next time step it will be possible to determine the accelerations at this
moment of time by solving the equations (3.5) to (3.7) again. And so the Whole process is
continued fOr äs long a period of time as is desired to complete a specific maheuver.
The track of the ship's path is described in an earth fixed system of cOordiñates XE and YE In this
reference system the ship's heading j, (course angle) relative to XE ¡S determined at each moment
of time in the simulation by a continuous integration of the ship's rate of turn r(t) that was
determined by equation (3.11):
-+ fr(t) dt (3.13)
-16-

The ship's velocity components in the earth fixOd coordinate system can now be transformed from
the ship fixed velocity components by:
UE «u.cos(ji) -v.sin() (3.14)
-v.cos() +u.sin(w) (3.15)
Integration of these velocities will provide the ship's position at each moment in the earth fixed
system of coordinates:
XE(t) - XE(t"O) + fUE(t) dt (3.16)
yE(t) YE(t"O) + fVE(t) dt (3.17)
For the assessment of the ship's course stability use is made of equations (3.6) and 3.7) i.n which
the lateral force Y and yawing moment N are described by the following Iinearizations. Equation
(3.5) can be neglected while assuming that the forward speed remains virtually unchanged by the
small deviations of the side velocity y and turning rate r.
(m +m)dv/dt + m,.dr/dt (''ur-m).tIj + Y.u.v (3.18)
mvr.dv/dt + (' + m.).dr/dt = N1.u.r + (3.19)
Without the use of the rudder the development of the motions y and r after some small
disturbance will depend on the. following criteria. The ship will be course stable if the motions will
extinguish after the disturbance is vanished. This will be the case if the following relation holds:
course stable if:
or iñ a non-dimensiònal way:
course stable if:
N N
"uv ("ur
N./-<Y' (Y7' -m1)
-17-
(3.20)
(3.21)

in which the forces have been made non-dimensional by dividig by (b.5pLTU2) while the
moments have been dividòd by (Q.5pL,2TU2). The non-dimensional mass m' corresponds to
2.CB.BIL. -
The cenier of application of the lateral force coefficient Y is défihOd by the static stability lever
x aheàd of the center of gravity while the center of application of the lateral foçce coefficient
(Yam) is defined by the damping lever Xr ahead of the conter of gravity:
x, N,/Y(J, and Xr Nur/(Yur - m) (3.22)
In Figures 4 and 5 the static stability lever XHV respectively the damping lever XHr for the bare hull
are shown as a function of the ship's main parameters LIB, B/T and block coefficient CB for the
even keel coñdition.
The difference between the damping lever Xr and static stability lever x is defined by the dynamic
stability lever 1; see e.g. Rosemàn (1987):
dynamic stability lever: = X - X (3.23)
With these distances the relations (3.20) or (3.21) result into:
course stable if: or 'd' > 0 (3.24)
in which the distances have been made non-dimensional by dividing by the ship's length L
Equation (3.24) leads to the conclusiòn that the ship is course stable if the center of application
of the force Y(v) due to drifting lies aft of the center of application of the apparent force
ÇY(r)-m.u.r) in reaction to the ship's rate of turning; see alsO Figure 6.
-18-

UB = 5
B/T- 2.5
B/T-3.5 -
0.6 0.7 0.8Ca
LIB = 6
0.9
i9-
I I
0.6 0.7 0.8CB
Fig. 4. Influence of the. main parameters of Fig. 5. Influence of the main parameters of
the bare hull in the even keel conditiOn the bare hull in the even keel condition
on the static stability lever XHV'. on the damping lever XH/.
0.9
0.6 0.7CB
0.8
,,.-"/
0.9
///1/B/T-4.5
X
0.6
0.5
Hr
0.4
0.3
0.2
0.6
'-s'.-
0.7 r 0.8 0.9
L/B = T
BIT-25
CB
L/B =7
8/7=2.5
-B/T - 3.5
---s- -s-s- -s--.5- -s- ----BIT -4.5 -s- -
I.I___0.6 - ......Q,_ -. 0.8 0.9 0.6 0.7 0.8
CB0.9
C9
L/B =50.5
0.4 B/T 2.5
0.3 B/T -3.5
0.2 B/T-4.5
0.5
B/T-4.5
0.4 I I I
0.6
XHV
B/T2.5 0.6
J
0.5
XHr
BIT 4.50.4
0.3
0.2
0.6
PtXHv
0.5
0.4
0.6
ÎXH,
0.5
04

Fig. 6. Schematic review of the forces on a çourse stable ship generated by the drift velOcity v
turning rate r and ruddèr angle &
From equations (320) and (322) it is seen that the mass m of the ship has a significant influence
on the fact whether the ship will be course stable or not; see e.g. Figure 7. A slender ship (small
m') with small block coefficient and large length/beam ratio will tend to be more course stable
than a short full ship (large m) irrespective of the hydrodynamic characteristics of the ship
course ùnstabie1.0
-1.0
IJT-23.00.15
course stable
Fig. 7. nfluence of the ship's parameters Lir and m' = 2.C8.B/L on. the course stability of a bare
hull on even keel; from Jacobs (1964.).
-20-
L! 18.730.25

4. LINEAR HYDRÓDYNAMIC REACTION FORCES ON A BARE HULL
In reaction to the ship's motions hydrodynamic fOrces are generated on the hull of the ship and
on itS appendages. In this section only the reaction forces on the bare hull will be discussed as
a fünction of the ship's velocity components; the so-called damping forces. In general these forces
are described by a subdivision into linear effects (such as the forces in an Ideal" fluid Which can
be described by potentials) and non-linear effects (such as resistance forces in a viscous fluid).
Experimentally the linear contributions are determined for small deviations from the equilibrium
position such as for small angles of attack at f rward speed of the ship. The non-linear
contributiôn is then derived from tests at larger angles of attack while assuming that the linear
coefficients remain constant at the larger angles of attack.
In the initial design stage usually no model test results are available from which the hydrodynamic
damping forces can be derived. One then cän se computer simulations only if the hydrodynaniic
forces cari be established otherwise.
Nowadays it is not'yet possible to determine the hydrodynaniic maneuvering forces analytically.
Therefore, empirical methods have been developed by means of which in the initial design stage
the hydrodynamic coefficients can be éstirnated as a function of the ship's dimensions; see e.g.
moue (1981), Kijima (1993), Ankudinov (1993) and others.
In empirical methods the linear hydródynamic coefficients are described rather accurately as a
function, of only a few aspects of the ship's dimensions. Two reasons can be given for the
achièved accuracy:
1. 'The linear hydrodynamic coefficients are most probably rather independent of local variations
in the ship's hull form (at the bow and/or the stem).
2 For a wide range of ships the linear hydrodynamic coefficients have been determined
-21-

experimentally. This means that an acceptable level of: confidence has been achieved in the
description of the coefficients as a function of the main ship parameters.
lt appears that the non-linear contribution of the hydrodynamic characteristics can only roughly
be estimated by empirical methods. This is very inconvenient when tight turns have to be
predicted by means of computer simulations. In such maneuvers the non-linear contributions play
a significant role. Three reasons are mostly giveh for this unfavorable aspect:
The non-linear hydrodynamic coefficients are rather sensitive to local form parameters of the
ship. This means that much more information is reqUired as a function of the larger number
of parameters.
Only for a limited number of ships the non-linear hydrodynamic coefficients have been
determined experimentally. This means that only a limited level of confidence has been
achieved in the description of the coefficients as a function of the ship parameters.
Often only the hydrodynamic coefficients have been published without the actual model, test
results. Some of the authors use quadratic non-linear coefficients while others apply tertiary
non-linear coefficients. In this way the validity of a presented non-linear coefficient is limited
and can not be compared with the corresponding coefficient for another hull form.
lt was thought that a better description of the non-linear component of the lateral force coUld be
achieved if one couÈd establish the local non-linear force component instead of the total force on
the ship; see Fedyayevski (1964). This local non-linear component is defined by the local cross
flow drag coefficient; see e.g. Sharma (1982) and Hooft (1987 and 1993).
In the next section a description is given about the non-linear hydrodynamic component of the
lateral hull force as derived from experiments with segmented models; see Matsumoto and
Suernitsu. (1983) and Beukelman (1988). From thèse tests the transverse forces on each of the
N segments are determined as a function of the drift velocity y arid turning rate r. In Figures 8 and.
-22-

-23-
9 some examples of' the results of such experiments are 'shown in Which the transverse fOrces
are shown in a non-dimensional form according to:
Y1 «Y/(Ó.5pSU2) (4.1)
in which V is the lateral force on the n-th of the N segments while Sn is the lateral area of the
segment.
Pure drifting (r=O)
First the hull damping forces are considered in reaction t the ship's drift velocity y. From the
measurements with segmented models presented by Matsumoto and Suemitsu (1983) and
Beukelman (1988) the following results are derived. ' -
lt ¡s assumed that the non-dimensional local lateral force Y,1 as a function of the drift, angle 13 can
be described by means of a linear coefficient Cy and a non-linear coefficient CD:
- Cy(n) .cos2(13).sin(13) - CD(n).sin(13). Isin(13) I (4.2)
in which Cy(n) is the local linear coefflcient and CD(n) the local cross flow drag coefficient.
lt can be shown that in equation (4.2) the linear contribution depends on the longitudinal velocity
component u=U.cos(13) and not on thé resultant velocity U. This means that for zero forward
speed (uO) no linear contribution in the lateral force exists.
In the application f equation (4.2) Use 'is made of the assutflpUøn that the linear coefficient Cy
is independent of the drift angle 13. This means that it is accepted that the local cross flow drag
coefficient CD is a function of the drift angle 13. Various physical arguments can be given to prove
'this assumption to be correct; see e.g. Tinling and Allen (1962) and Sarpkaya (1965).

Y4,
-0.4
-08o
-24-
-0.4
o
Y10'
-0.4
-0.8
o
-08o
10
o
wOoo a
lo
15
15 20
Fig. 8. Influence of the drift angle 13 on the lateral forces measured on ach of the lo segments;
see Matsumoto and Suemitsu (1983,).
o
Y2'
-04
-0.8
o
-0.4
-0.8
o
Y7,
-0.4
-0.8
o
"8'-04
-08-o
ao
20
o'o D$3 o°o Do
o
o 5 lo 15 o 5 10 f3 15 20
i ÖDO ojJ Q1J0
o
u
o lo l 0 15 20
wooo ID
o
ooD
1315 20 lo 15 20

0.2 04 V 06
- -25-
o 0.2 0.4
C
T oè
Fig. 9. Influence of the non-dimensional rate of tmingy on thé laterá! forces meàsured on each
of the la segments; see MatsumotO ánd Suemitsu (1983).
OE25
o
Y1,
-0.25
-0.5
0.25
o
-0.25
-05
25
O Tanker
D Container
0.25
o
-025
-05
025
Y7.
-025
-05
0.25
oO
o 0.2 04 Y 06 o 0.2 0.4 Y 0.6
o
o 0.2 0.4 Y 0.6 o 0.2 OE4 y 0.6
o
Y3,
-0.25
-0.5
0.25
o
Y4.
-0.25
-0.5
0.25
o o o
'Y'8'
-0.25
0.25
o
Y9.
-0.25
-05
0:25
B Y1
o 0.2 0.4 'f 0.6 o 0.2 0.4 0:6
O41O O O
D
0.2 0.4 0.6 o 0.2 OE4 'f 0.5
oDO
Oo
vio.o
Y&.
-0.25 -0.25
-05

From the test results on each segment as presented in Figure 8 one determines the local linear
coefficient Cy(n) from the, range of small drift angles . Once this value of Cy(n) has been
established for each segment then the cross flow drag coefficient can de derived from the
measurements at higher drift angles.
From the above descriptions it is found that both the linear coefficient and the. cross flow drag
coefficient vasies over the length of the shIp. In Figure 1 Oa the longitudinal distribution is given.
of the linear coefficient Cy describing the linear contribution to the lateral force in reaction to a
drift angle 13. In Table 2 the. main characteñstiçs are presented of the ships of which the Cy0
distribution is shown in Figura lOa.
Theoretically (see e.g. Jones (1946) and Jacobs (1964)) it'can be shown that the local linear force
per unit length Y(13) is determined by the instantaneous apparent acòeleration of the lOcal lateral
added mass of water alongside the ship:
Y(13) - -u.v.m . (4.3)
with m being the lateral added mass of water per unit length of the ship and being the
distance of the cross section from the forward perpendicular. The derivatives Y and are
deflned by: .
Y - dY/dT m = dm/d (4.4)
When the n-th segment ranges from '(n) behind the forward perpendicular to 'a(h1) then one finds
from equatión (4.3) that the lateral force on this segment is theoretically determined by:
(n)
Y1,(13) .- $ YU3) . d, = -u . y. va(u1)) m(f(fl))] (4.5)
-26-

Table 2. Non-dimensional characteristics of the bare hull of two types of ships
course uñstable course unstable
-27-
Ship 1: Container Ship 2: Tanker
Dimensions
LIB 6.90Ô 5.730
LIT 20.550 15.310
BIT 2.979 2.673
CB 0.562 0.825
m' = 2 CB B/L 0.1629 0.2880
Trim 0.33° 0.0°
Position of CG
(forward of midships)
-1.80% +2.80%
Hydrodynamics
Y' = YJ(0.5 p T) -0.2402 -0.2816
N' = NJ(0.5 p L,2 T) -0.08707 -0.1325
XHV' = Xy/Lpp = NV/YV 0.3625 0.4705
= YJ(0.5 p L2 T) 0.03732 0.0666
N,' = N/(0.5 p L3 T) -0.03227 -0.04325
XH,' = xHLpp = Nr'/(Yr'm') 0.2570 0.1953
'Hd = XHr' - XHV' -0.1055 -0.2752

-28-
AP 4 FP
0.40-
0.30- m1 s'
0.20
0.10- Container,
- Tanker
00
Fig. lOa. Longitudinal distributiön of the linear Fig. lOb. Longitudinal distribution of ifie lateral
lateral force coefficient due to added mass..
drifting.
In Figure 1 Ob the longitudinal distribution of the non-dimensional lateral added mass
m/(O.5pLT) is preseñted of the two ships of which the linear coefficients are shown in Figure
lOa. Comparing the results in Figures lOa and lOb it is seen that the tendencies in these figures
correspond with the theory in equation (4.3), such as:
At the forward perpendicular there is a stepwise increment of the lateral added mass (large
positive value of m.,); see Figure lOb. This corresponds to the relatively large negative
measured lateral force coefficient on the first segment at the bow; see Figure lOa.
At the even keel condition the lateral added mass at the fore ship increases gradually
(moderate positive values of m) with increasing distance from the forward perpendicuiar
which corresponds to a measuréd moderate negative coefficient Cy at the fore ship.
At the even keel condition thé lateral added mass remains approximately constant (m is
zero) over the parallel midship while over this length of the ship a nearly zero value is
measured for the linear coefficient Cy.

-29-
At the even keel condition the lateral added mass at the aft ship decreases gradually at
increasing distance from the bow (rti is moderately negative) which corresponds to a
moderate positive linear lateral force coefficient that was found from the experiments. It
should be realized that a positive linear coefficient corresponds to a positive lateral force ¡n
reaction to a positive drift velocity y.
The resultant damping coefficients and NH follow from the summation of the lateral
force coefficients Cy(n) on each of the segments:
Y' - (Cy(n)S)/(LT) and NH' - (4.6)
At the even keel condition the positive reaction force in the aft part counteracts the negative
reaction force in the fore ship and magnifies the negative yawing moment at the fore ship.
Theoretically one would find that in an ideal fluid the resultant force coefficient H' would
be zero while the resultant yawing moment NH' would correspond to the theory of Munk
(1924).
At the even keel condition the diminished lateral äìè coefficient H' and the amplified
resultant yawing moment NH' causes a relatively large value of the distance xHV; see
equation (3.22). However, from equation (3.24) a small value of the distance x' is desired
for the ship to be stable. In Figure 4 it can 'be seen in which way the static stability lever XHV'
¡s influenced by the 'ship's main parameters LiB, BIT and Ob.
In order to improve the course stability the static stability lever XHV' has to be reduced. This
can be realized by increasing the' absolute value of the hull force coefficient and
decreasing the absolute value of the hull moment coefficient NH'. This can be achieved by
decreasing the positive reaction force coefficient Cy at the aft part of the ship while applying
more added mass towards the stem (local higher values of' mfl), by which Im/ is reduced.
Two examples of such applications are:
1. Elongation of a center skeg will result in larger added mass coefficients at the stèrn and
thus of an increment of the absolute value of and a decrement of the 'absolute value

of NHP; see Figure 11. In the ¡TIC 1993 report of the Manoeuvring Cmmittee
information is given about the influence of the stem shape and skeg on the added mass
at the stem.
2. At a positive blm (bow up) the added mass will increase more or less continuously
toWards the aft perpendicular (see Figure 1 2b) leading to a continuous negative vâlue of
the lateral force per segment over the whole length of the ship; see Êigure 12a.
A P.
-30-
N.
w(j.0
0.1
0.0
-0.1
-0.2
-0.3
-0.4
D,wu,
o
Fig. 11. Influence of the center skg on the linear hydrodynamic coefficients accàrdìng to Jacobs
(1964).

1.0
tCy
-0.5
1.0
-1.5
.2.0AP
'IiPositive trimEven keelNegative trim
4t;' FP
-31
0.10-
0.0AP
0.40-tPositive trim-'
0.30- -
0.20- m'
(bow out) ___. . J
trim (bow in)
Even keel
Fig. 12a. InflUence of the trim on the lÖngitudilnal Fig. 12b Influence of the trim on the longitudinal
distribution of the linear lateral fOrce distribution of the lateral added mass.
coefficient Cy due to drifting.
Pre turning (v=O)
The hull damping forces are now considered in reaction to the ship's rate of turning r. In Figure
9 the measured lateral forces on the various segments are shown as a function of the räte of
turning. These data have been preseñted by Matsumoto äpd. Suemitsu (1983). From these
measured values the following results are derived.
lt is assumed that the non-dimensional local lateral force Y' (see equation (4.1)) on the n-th
segment as a function of the rate of turning r can be descríbd by means of a linear coefficient
Cy.,(n) and a non-lineär coefficient. CD(n):
Y(y)' = Cy7(n).y - CD(n).(xfl'.y). Ixn,. (4.7)
In the application of equation (4.7) use ¡s made of the assumption that the linear cbefficient
Cy.,(n) does not change at increasing rate of tUrning. This means that ¡t is accepted that the local
cross flow drag coefficient CD does vary with the amount of turning rate r.

From the test results on each segment as presented in Figure 9 one determines the local linear
coefficient Cy7(n) at the range of small turning rates r. Once this value of Cy7(n) has been
established for each segment then. the cross flow drag coefficient on each segment can be
derived frOm the measurements at higher turning rates.
From the above descriptions, it is found that both the linear coefficient and the cross flow drag
coefficient varies over the length ,f the ship. In Figure 13a the longitudinal distribUtion, of the
linear coefficient Cy7 is given by which the linear component of the lateral force is described in
reaction t a 'turning rate r. The main characteristics of the ships, used in this figure are shown
¡n Table 2.
Theoretically (see e.g Jacobs (1964)) one finds that the local linear component of the lateral fOrce
coefficient per unit length Y(r) ¡s proportional to the local moment per unit length Ç of the lateral
added mass of water alongside the ship:
Y(r) -u.r.i (4.8)
with Ç being the moment Of the lateral added mass of water pet unit length of the ship m and
the distance Of the cross section from the forward perpendicular1 The derivatives Y and Ç are
defined by:
dYIdT = dÇ/d with iv = x . (4.9)
When the n-th segment ranges from (n) behind the forward perpendicular to(n) then one finds
from equation (4.8) that the lateral force on this segment is theoretically determined by:
(n)
Y(r)= f Y(r).d -u.r.[iv(a(n)) - (4.10)
-32-

0.5
0.25
0.0Cyy.0.25
-0.5
-0.75
-1.0
Fig. 13a. Longitudinal distribution of the lineat
lateral force coefficient y.1, due to
turning.
-33-
0.15-
0.10-
0.05-
0.0
.005-
.0.10-
.0.15
f= x'rn
AP 0
/
Container- - - Tanker
Fig. 13b. Longitudinal distnbution of the mcnent
of the lateral added mass.
FP
In Figure 13b the longitudinal distribütiön of the non-dimensional moment Ç' of the lateral added
mass is presented of the two ships of whjch the linear coefficiént. Cy.), is shown in Figure 13a.
Comparing the results in Figures 13a and 13b it is seen that the tendencies in these figures
correspond with the theory in equatjon (4.8), such as:
From Figure 1 3b it, is seeñ that a stepwise increment of the moment öf the lateral added
mass exists at the forward perpendicular. This corresponds to the rather large negative lateral
force measured on the first most forward segment; see Figure 13a.
At the even keel condition the moment Ç decreases continuously behind the forward.
perpendicular which corresponds to the positive lateral fórces measured on all segments
behind the first one.
- The resultant damping coefficients ''Hr' and NHr' follow from the summation of the lateral force
coefficients Cy(n) on. each of the segments:
- (E Cy7(n) Sn)/(LppT) and NHr' ( X11'. Cy.1(n) S)I(LT) (4.11)
At the even keel conditiön the ñegative linear fOrce coefficient Cy on the first segment and
the poiti'ìe force coefficients on the successive segments cancel each other; see equation

(4.11). As a consequence one finds a relatively small, value for the hull linear coefficient ''Hr
which can be either positive or negative.
The above described distribution of Cy7 for the even keel condition will also lead to a
relatively small value of the resultant damping moment coefficient NH(' at the even keel
condition. According to equation (3.22) a small moment coefficient NH,.' will result into a
relative small value of the damping lever XH,.'. However, from equation (3.24) the value of the
damping lever XHr' should be as large as possible for the ship to be course stable.
In Figure 5 the damping lever XH,.' is shòwn as a function of the ship's main parameters LIB,
B/T and block coefficient Cb at the even keel condition. In order to ascertain the ship's course
stability in the design stage it is helpful to consider the effect of the ship's main characteistics
on the damping lever XHr' in relation to the static stability lever XHV' presented in Figure 4.
In order to improve the course stability the damping lever XH,.' has to be increased by
increasing the reaction force Hr' -by which (YH('-m') decreases- and increasing the absôlute
value of the yaw moment NH,.'. This can be achieved by increasing the added mass towards
the stem by which the moment Ç of the added mass m decreases more rapidly. This
phenomenon can be elucidated by elongation of a center skeg by Which the moment of the
added mass coethcients at the stern are enlarged. Thus y! will increase and also the
absolute value of Nr'; seeFigure 11.
From the above considerations the following conclusions can be drawn with respect to the linear
aspects of the hIl damping' forces on a bare hull:
1. In Figures 4 and 5 the static stability lever XHV' respectively the damping lever XH,.' are
presented as a function of the main parameters LIB, B/T and Cb of the ship in the even keel
condition. Using these figures in the initiai design stage a clear indication is obtained about
the amount of the course instability of the bare hull. It is rernatk le that the values derived
from these figutes remain valid for a wide range of local variations ¡n the hull form. This
means that ¡t will be nearly impossible to influence the course stability (that means to

decrease the course iñstàbilit') by changing the hil form locally. In Figure 15 the results are
shown of tests with three stem forms shown in Figurö 14: pram form, moderate pram form
and conventional stern form. lt is seen that there is hardly any influence of the stem form on
the bare hull force for small values of the drift angle.
pramform afterbody
moderate pramform afterbody
convential afterbody
Fib. 14. Systématic variation of hull forms for whíôh model test have been pedorrned.

0.01
0.002
o
-0.002
-0.004
-0.006
-0.008
moderate
conventional
-36-
10 15 20 25 30 35 40
pratntorm
moderate pramtorni.-..,
conventional_e',.,
o 5 10 15 20 25 30 35 40
13
Fig. 15. Influence of the stem form shown in Figure 14 on the lateral force and yaw moment on
the bare hull of a short full ship.
From the findings in Item lit can be assessed how much effort has to be put iñ
limiting the instability by increasing the local non-linear contribution of the lateral force;
see Section 5 or
- reducing the course instability by applying stabilizing appendages -such as ruddòrs
and/or fins- to the hull; see Section 6.
From Figure 5 ¡t is seen that the damping lever XHr' of a slender ship with large LIB and small
block coefficient C8 will be larger than that of a short full ship while from Figure 5 it appears
that the static stabiiity lever XHV' of the slender ship will be smaller than that of a short full
ship. lt is thereforè likely that the slender ship will be more course stable respectively less
-0.01Y..
-0.02
-0.03
-0.04

course unstable than the full bodied ship as a result of the fact that the dynamic stability lever
1Hd' (being xHr'-xHv'; see equation 3.23) will be more pósitive respectively less negative for the
slender ship. This result is also confirmed by the data presented in Tablé 2 for the
containership (CB = 0.562 and LJB = 6.9) in comparison to the tanker (LIB = 5.73 and
CB = 0.825).
-37-.

-38-
5. NON-LINEAR HYDRODYNAMIC REACTION FORCES
ON A BARE HULL
In the previous section the linearized damping forces on the bare hull have been evaluated.
For the description of the hull forces in reaction to large hull velocities such as drifting and
turning more insight is needed in the origin of the non-linear contributions to the damping
forces. For this purpose again the results of segmented model tests are of essential need; see
Matsumoto and Suemitsu (1983) and Beukelman (1988). From these tests the transverse
force on each segment is determined as a function of the drift velocity y and turning rate r in
relation to the forward speed component u:
3 =atan(v/u) and y =r.LIu (5.1)
with being the drift angle and y the non-dimensional rate of turning. In Figures 8 and 9
some results of the segmented model tests are presented in which the transverse forces Y
on the n-th element are shown in a non-dimensional form according to equation (4.1).
In the previous section it was shown how the linear coefficients Cy(n) and Cy.(n) on each
segment were derived from the tests at small drift angles and small turning rates respectively.
When assuming that the linear coefficients of each segment remain constant for the larger
velocities then the non-linear contribution can be derived from equations (4.2) and (4.7)
according to:
Y11(n) - Y'(measured)
- Cy(n).sin(l3).cos2() - Cy(n).y(5.2)
with Y1'(n) being the non-linear contribution of the non-dimensional force on the n-th segment.

The non-linear contribution Y1'(n) is described by the cross flow drag coefficient C0(n) accord-
ing to:
-Y'(n)C0(n)
- 0.5pSvIvI = vn,.Ivn'I.
with the following parameters on the n-th segment:
C0(n) = IoOal cross flow drag. coefficient
Sn = lateral area of the segment
= local lateral velocity ( v+x.r)
Y1(n) = non-linear contribution of the transverse force on the segment.
As it is assumed that the linear coefficients in e uation (5.2) remain constant it will be obvious
that the cross flow drag coeffiòient C0(n) of each segment will vary with the velocity conditiOn
of the hull: CD(n) E CD(n;,'y as will be elucidated ¡n the following.
For pure transverse motions (zero forward speed and thus 900 drift angle ) one often finds a
rather smooth longitudir!ai distribution of the cross flow drag coefficient C0 which increases or
decreases towards the ships ends depending on the form of the ends: For fine ships with
sharp ends the CD value increases towards the ends while for full bodied ships the CD vaJue
decreases towards the ends; see e.g. Faltinsen (1990). In Figure 16 the distribution of. the
cross flow drag coefficient C0U3=9O°) is shown for a container vessel and a tanker; see
Matsumoto and Suemitsu (1983). It is assumed that the cross flow drag coefficient at the mid-
ships section will depend mainly on the local form of the underwater hull (ratio B/T and
mids..ps section coefficient CM) and to a lesser degree on the local Reynolds number; see
e.g. Hoerner (1965) and Kapsenberg (1989). .
(5.3)
-39-

11.0CD
1.5
0.5
0.0
-40-
AP FP
Fig. 16. Longitudinal distribution of the cross flow drag coefficient at 900 drift ángle; from
Matsumoto and Suemitsu (1983).
During maneuvèring at the service speed one will find that the drjft. angles remain smaller than
about 300. For these smaller drift angles the local cross flòw drag coeffiôients have been
determined according to the derivation in equation (5.2). The results of this derivation are
presented in Figure 17. From the results in this figure the. following conclusions can be drawn:
Thé cross flow dra coeffident on the first segment from the bow is most próbably caused
by thé bow wave. Therefore it is assumed that this value depends on the forward speed of
the ship; see also the findings by Matsumoto and Suemitsu (1983).
Aside of the cross flow drag coefficient on the most forward segment(s) it is seen from the
results in Figure 17 that for small drift angles the values of ÖD increase ät larder diS-
tances from thé bow until sâme maximUm value is attained after which Cd decreases a
little. At: ¡ncteásfrg drift angles this curve of Cd over the ship's length moves forward.

CD
1.5
0.5
1.5
0.5
o
AP
AP
FP
FP
-41-
CD
1.5
0.5
1.5
0.5
o
AP
AP
= 12°
FP
FP
Fig. 17. Longitudinal distribution of the cross flow drag coefficient at drift angles up till 20°;
frOm Beuke/man (1988).
Lpp/T = 22.81Todd6O model, even keel;Fn = 0.15 Lpp/T = 17.50
LppíT= 14.20
f3= 16° = 20°

1h
13
CCD
0.5
o
-42-
(5.4)
AP FP
p200
AP FP
Fig. 18. Longitudinal distribution of the corrected cross flow drag coefficient C0 derived from
the experiments with segmented models performed by Matsumoto and Suemitsu
(1983).
The value of CD() at a given cross section varies at increasing drift angles from the
values shown in Figure 17 to the values shown in Figure 16 for the 900 drift angle. There-
fore, the relation is considered between 0Dn(l3900) at an arbitrary drift angle and
CDfl(P=9O°) at a drift angle of 900 for the various ship types and ship conditions. For this
purpose use is made of the corrected drag coefficient Ccon(f3) which is defined by:
CD(9O)CcD()
- CD(9O)
leading to the fact that at 900 drift angle the coefficient CCD equals unity over the whole
length of the ship.
Combining the results in Figures 16 and 17 according to equation (5.4) will yield the results
presented in Figure 18.

N
-43-
g0
0 0 0a-10 ' -30 ' e-50 e-70\ \\
N1
cc0
AP. 0.5 FP.
4
Fig. 19. Schematic indication of the forward shift of the dis fribution of the corrected cross flow
drag coefficient C0 at increasing drift angles !3 for small forward speed (Fn is small).
From the results of the corrected drag coefficient 0CD() in Figure 18 it is concluded that this
coefficient depends on the longitudinal locatioh behind the ÊP and on the drift angÍe as
shown schematically in Figure 19.
lt is assumed that the local cross flow drag coeffiòient for any arbitrary hull form can be
derived from using equation (5.4) in which:
-. the "corrected cross flow coefficient1 C from Figure 19 ¡s taken invariable for any arbi-
trary hUH form, and
the cioss-flow drag coefficient CD«3=900) at 900 drift angle being a function of the hull
form as is shown for example in Figure 16.
When applying this method for a short full bodied ship then an acceptable agreement is found
between the resUlts from the calculätions based on the longitudinal distribution of the cross
flow drag coefficient on the one side and the results from model tests on the other; see Figure
20.

0.01O Model test- Calculated
O o
0.001
toN
-0.002
-0.004
-0.006
-0.008o
oo
O
O Model test- Calculated
o
15 30 45 600 75 90
Fig. 20. Lateral force and yawing moment on a short full bodied hull from calculations based
on the cross flow drag distribution in comparison with model test results.
From the longitudinal distribution of the cross flow drag coefficient at the service speed (see
Figure 17) it is seen that the non-linear contribution of the local transverse force leads to a
stabilization of the ships maneuverability which is explained as follows:
Up till about 3Ø0 drift angle the lateral force H() on the hull increases more than linearly
with increasing drift angles; see e.g. Figure 21. However, from this figure it ¡s also seen
that the total yawing moment NH(J3) increases almost linearly with increasing drift angle
because of the fact that the non-linear transverse force contribution applies mainly at the
aft part of the hull. The result of these two tendencies ¡s that the center of application of
the lateral force Y(v) is shifted backwards as x decreases at increasing drift angle:
XHV = NH(v)/YH(v) (5.5)
-44-
7545 60 90o I5 30
toY..
-0.02
-0.04
-0.06
o 5 10 15.--* 20
-45-
o
O TankerD Container
O
5 10 15 20
Fig. 21. Influence of drift angle oli the láteral force and yawing moment for two hull forms
without appendages; from Matsumotô and Suerhitsu (1983,).
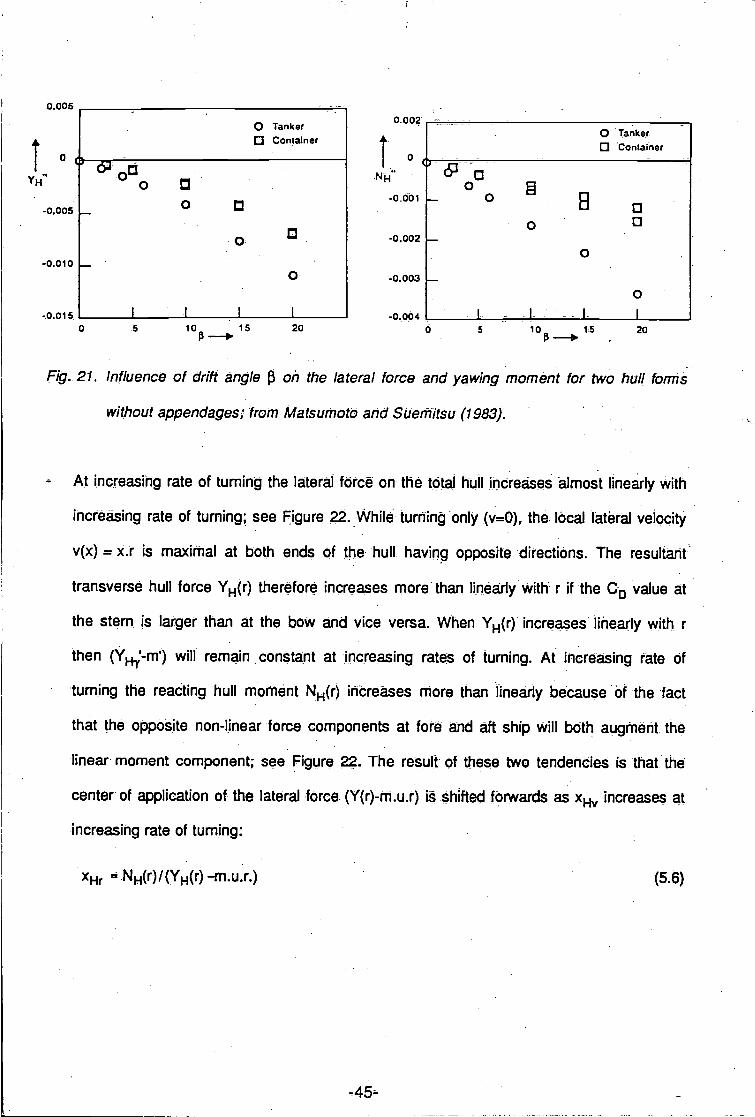
At increasing rate of turning the lateral fOrce on the tta hull increases älmost linearly with
increasing rate of turning; see Figure 22. While turning only (vRO), the. local látéral veÊocity
v(x) = x.r is maximal at both ends of the hull having opposite directions. The resultant
transverse hull force YH(r) therefore increases more than linéarly With r if the C0 value at
the stem is larger than at the bw and vice versa. When YH(r) increases linearly with r
then (Y-m') will remain cônstant at increasing rates of turning. At increasing rate of
turning the reacting hull momént NH(r) increases mOre than linearly because óf the fact
that th oppOsite non-linear force components àt fore and aft ship will both augment the
linear moment component; see Figure 22. The result of these two tendencies is that the
center of application of the lateral force. (Y(r)-m.u.r) is shifted fôrwards as x1, increases at
increasing rate of turning:
.NH(r)/(YH(r) -m.u.r.) . (5.6)
-0.005 o D-0.001 O
oDD
o -0.002
o-0.0 10
o -0.003
O
-0.0 15 I I -0 004 I-
0.002
L. o
0.005
H"
O TankerD Container
o

-46-
0.001
-0.001
0.000'
D
O TankerD Container
NH01
-0.0005
O TankerD Container
oD
o BD
O
Do U
-0.002 Do -0.0011....0
-0.003 o .0.0015}.I o o
o
-0.004 I I I t I .0.002 I I I I I I
o 0.1 0.2 0.3 0.4 0.5 0.6 0 0.1 0.2 0.3 0.4 0.5Ts. T s.
Fig. 22. Influence of non-dimensional turning rate y on the lateral force and yawing moment
for two hull forms without appendages; from Matsumoto and Suemitsu (1983).
From the above it is seen that the static stability lever XHV decreases at increasing drift angle
while the damping lever XHr increases at increasing turning rate. As a result of the non-linear
viscous contribution of the transverse hull force it is found that the dynamic stability lever
'Hd E XH(XHv will increase at increasing ship motions y and r.
Inì case that the ship is course unstable then it was found at negligibly small motions y and r
that the dynamic stability lever 'Hd is negative. From the above it is seen that at increasing
motions the dynamic stability lever will increase until the motions have reached some kind of
equilibrium in which 'EId is zero at which the ship will continue to turn at some drift angle :
XHV Hr and YH(v) YÑ(r) -rn.u.r (5.7)

6. APPENDAGES IMPROVING THE COURSE STABILITY
The ship's maneuverability might be seriously deteriorated by the fact that the ship is very
course unstable. In that case it is observed for instance that the ship has a bad "course
checking ability" which follows from the large overshoot angles in the Z-maneuver. To improve
this type of bad maneuverability one tries in the first place to make the ship more course
stable (decreasing the còurse instability).
Improving the ship's stability can be realized by applying larger rudders (see e.g. Figures 23
and 24), fins and such at the stern of the ship. Basically the improvement is seen from the
following considerations.
BARE HULL
1_0
o
-1.0
-2.0
HULL WITH RUDDER AND PROPELLER
Fig. 23. Improving the course stability (more negative stability index a7) due tO the application
of rudder nd propeller; from Jacobs (1964).
- A 7..

V= atan( - -0.5 y
-rudder area as a percentageof the lateral area Lpp.T
Fig. 24. Improving the course stability (more negative stability index ) as a result of an
increasing rudder area; from Jacobs (1964).
In the neutral position of the rudder (rudder angle 6=0) the angle of incidênce of the flow 8H
to- the -rudder, as a- consequence of the ship mötiön components u, y- arid r described
theoretically by: - - -
(6.1)
in which XR is the distance of the rudder relative to the center of reference. For small angles
of incidence the effectiveness of the rudder or the fin is expressed by the coefflcient Y8 being
positive as Will be shown in Section 7. One thus finds that due to the ship's motions the lateral
fOrce Yinduced by the rudderfollows from: - -
Y(ruddèr) -Y6 *3 - - (6.2)
From a combination of equations (6.1) and (6.2) -one fiñds the rudder force- YRU) due to the
ship's drifting and YRy dúe to the ship's turning from (see also Figure 25):
'RU) = -Y8 ! and YRy) = 0.5 Y6.y - -- (6.3)
- -48-
2.0
1.0
O
-2.0
LIB
LIT =B/T
CB =
7
18.75
2.680.6
o i Ó 2.0 3.0

-49-
Ht (r) - H (r)- mur
"H (r)
FIg. 25. Review of forceson the ship.
With these results one finds that:
1. With the rudder or fin the reactiOn force Y()' due to a drift angle iñcreases (more nega-
tive) because of the negative value of R'(); see also Figure 25:
H 'p - -/ // / 'JI (6.4)
However, the reacting moment N()' due to drifting, decreases as the negative momeñt
NH()' is compensated by the positive moment NR( generated by the rudder:
N =N' +N' =NH' +O.5Y8' (6.5)
Combining equations (6.4) and (6.5) shOws that the total reaction forcé n the hùll with
rudder Y(f3)' will shift backwards which means that the static stability lever x,' for the shjp
with rudder Or fin will be smaller than that of the bare hull:
xv,N'+OE5Y'
(6.6)

2. With the rudder or fin the reaction force Y(y)' = Y(y)'-m due to a turning rate decreases
(less negative) because of the positive value of R(7)'; see also Figure 25:
- (Y11' IY./) -mt 'Ç4f/ +0.5V8t) -rn' (6.7)
However, the reacting moment N(y)' due tò turning increaseS as the negative moment
NH(y)' becomes more negative due to the negative moment NR(y)' generated by the
rudder:
N./ - N/ + ¿N./ N. - 0.25 Y81 (6.8)
Combining equations (6.7) 'and (6.8) shows that. the total reaction force on the hull with
rudder Y(y)' will shift forwards which means that the damping lever xr' for the ship with
rudder or fin will be larger than that of the bare hull:
XI_ NH?' -0.25Y6r
''Ht7' +0.5Y6
In Figures 26 and 27 two exaniles are given of the. influence of the rudder area on the linear
hydrodynamic coefficients described in equations (6.4), (6.5), (6.7) and (6.8)
Combining equations (6.6) arid (6.9) one finds that the application of a rudder or a finj at the
stem will decrease the static 'stability lever and will increase the damping lever Xr'.. The
application of a rudder or a' fin will therefore improve the course stability. The stabilizing ap-
pendages for improving the course stability will be made so large as is needed to compensate
for the instability of the bare huJl to such a degree that the instabilIty will become acceptable.
lt should be noted that from a pòint of view of maneuvering it is sometimes preferred to apply
fins instead of enlarging the rudders such as will be elucidated in the following examples.
-50-
(6.9)

0.1 -
0.0
-0.1 -
-0.2 -
-0.3 -,
A.P.
Ni
Rudder area = 1.6 % LT
Fig. 26. Influence of the rudder on the linear
hydrodynamic coefficients for a ship
with a block coefficient of 0.6; from
Jacobs (1964).
If the course instability of the bare hull is rather large then the ship will become quite course
unstable fOr the condition in which the rudder has lost all its effecthieness (Y5'-40; see. Section
7) such as during stopping of the ship; see e.g. Yoshimura, (1993) who describes the prob-
lems which may occur during stopping of an unstable single screw ship by means of a CP
propeller. To overcome the problem of course instability during stopping one sometimes
applies fins and sometimes modifies the rudder configuration such that the rudder will remain
effective dUring the stopping procedure.
-51-
A
0.1 -
0.9
D
w
= Do-
'Q. w
Rudder area 1.6% LT
base line
Fig. 27. Influence of the rudder on the linear
hydrodynamic coefficients for a ship
with a block coefficient of 0.8; from
Jacobs (1964).
LIB = 7L/T = 18.75-B/T = 2.68CB = 0.8
L/B = 7LIT = 18.75BIT 2.68CB = 0.6

In case that the ship's response to the rudder is rather sensitive (a violent response of the
ship to the rudder) then it is not recommended to enlarge the rudder for decreasing the course
instability. In that case the ship can only be made course stable by means of applying fins.
The results in Figures 26 and 27 show the effect of the rudder on the linear hydrodynarnic
coefficients. As indicated in the figures this effect applies to ships with a length/beam ratib of
L./B 7. However, for a short full bodied ship one may find that the rudder will have less
effect. In Figures 28 and 29 it is shown that for the = 5.48 hull of Figure 14 the rudder
will have n effect at all for the range of small motions. For the conventional hull form the
rudder does not have any effect for drift angles Up till about loo; see Figure 28. For the hull
with the pram form stem one finds that the rudder does not have any effect on the transverse
force for drift angles up till about 10° and on the yawing moment up till 50 drift angles; see
Êigure 29. In his paper of 1993 Kose reports that he has tested hull forms for which in the
ballast condition the rudder did not have any stabilizing effect up till 150 drift angles.
For ¿Il these types of ships one finds that the application of the rudder did not improve the
course stability. If the ship is unacceptably course unstable then the stability can only be
improved by applying fins at thé sides of the stem where it is expected that the stabilizing
capacity (of the fins) will be more effective than near the center plane of the ship.
Also from the results by Róseman (1987) for full, bodied ships one finds that the rudder
stabilizing capacity is less effective than follows from the descriptions for óY' in equation
(6.4). ¿N' in equation (6.5), in equation (6.7) and 4V; in equation (6.8). Roseman
gives for example values of betweén 0.6 and 0.685 for the ratio between and -'(5':
For CB>0.8 = -O.65Y5 (6.10)
-52-'

0 5 10 15 2Ö 25 30 35 40
j3
Fig. 28. Influence of rudder on the transverse
force and yawing moment on a short
full bodied ship with a conventional
stem form (see Figure 14).
This result only indicates that the stabilizing capàcity of the rudder is less effective than may
be expected from its control capacity as expressed by the coefficient Y5. However, the details
of some of the data presented by Roseman are not clear. As an example, the ratio between
and Y5' ¡s considered. According to Roseman a value of about 0.8 is found for this ratio
while according to his formula ¡t is expected that this value should be less than 0.5.
- -53.
bare hullhull with rudde? .
and propeller
5 10 15 20 25 30 35 40
bare hull
hull with rudderand propeller
0 5 10 15 20 25 30 35 40
13
Fig. 29. InflUence of rudder on the transverse
force and yawing moment on a short
full bodied ship with a pram form.
stem (see Figure 14).
0.01
o
-0.01Y..
0.02
-0.03
-0.04
0.002
o
-0.002N
-0.004
-0.006
-0.008
0.01
-0.01Y..
-0.02
-0.03
-0.04
0.002
O
-0.002
-0.004
-0.006
-0.008
-% - bare hullhuIl with rudde?and propeller
I- I0 5 10 15 20 25 30 35 40
p
0
hull with rudder.._and propeller
bare hull - -

-54-
Fig. 30. Schematic indication of the flow straightening effect along the ship's hull by which the
lateral velocity component decreases towards the stern.
The reduction of the stabilizing effectiveness of the rudder behind short full bodied ships is
explained by the so-called flow straightening effect; see Figure 30. Due to this effect the trans-
verse velocity component is reduced towards the stem of the ship such that the effective
angle of incidence 8H due to the ship's motions will be smaller than described in equation
(6.1). Therefore, equation (6.1) ¡s rewritten according to (6.11) to describe the effective angle
of incidence 6H due to the ship's motions:
= atan(Cdb.!. +2Cdr) = Cdbt3 - GdrY (6.11)
in which the coefficients Cdb and °dr can be approximated by means of the empirical relations
presented by Kijima (1993) and by Ankudinov (1993).
From the description in equation (6.11) it is seen that the stabilizing capacity of the rudder will
not be very effective behind ships with a large flow straightening effect. For such ships one
will find small values for the coefficients Cdb and Cdr. The stabilizing capacity of a rudder

behind these ships will be small because of the fact that the angle of incidence of the flow to
the rudder 8H due to the ships motions will be small. lt wiIJ be clear that in this case hardly
any effect on the stabilizing capacity will be derived frOm an increment 0f the rudder effective-
ness by increásing its size or by adopting a high lift profile.
In the above only the influence has been discussed of the appendages at the stem such as
rudders and fins. However, other types Of appendages may also influence the ships m.aneu-
verability as well such as for example bilge keels. These can cause an increase of about 30%
on the drift forces when attached to a slender hull with a rather low midship section coefficient.
of CM 0.75. .
-55-

7. CONTROL MEANS
Most commonly the ship is controlled by means of one or more rudders at the stem. In that case
the control function of the rudder has to be considered in eIation to its cOurse stabilizing function
as has been described by Davidson and Schiff (1946).
The rudder effèctiveness is defined by the transverse force that is generated ¿t a given rudder
angle 6. lt is observed that at a given rudder angle a transverse fOrce Y(6) is generated which
is larger than the trànsverse force generated on the rudder only; see Figure 31:
Y(8) = R() + 'T'H(ö) = (1 +aH)YR(6) (7.1)
in which the coefficient aH can be approximated by mèans of the empirical formulae presented
by Kijima (1993) and Ankudinov (1993).
In Figure 31 and in eqùation (7.1) it is assumed that the difference .Y(6) between the total
transverse force Y(8) and the force R(8) on the rudder is generated on the hull and is therefore
described by YH(6). With this descriptiOn the yaw moment N(8) generated by a rudder angle can
be formulated by:
N(3) XRYR(8) + xYH(3) = (xR+xaH)YR(8) (7.2)
H (6)
Fig. 31. Forces excited on the rudder and the hull due to rudder déflection.
-56-
8

in which xÁ is the distance of the rudder from the ship's center of reference while the distance
XHS can be approximated by means of the empirical formulae presented by Kijirna and
Ankudinóv.
For a further evaluation of. the rudder effectiveness (see also the application in Section 6) one
uses the rudder coefficient Y5 which is defined by:
Y5 =Y(5)/sin(5) or Y =Y(6)'/sin(6) (7.3)
with
Y(6)' =Y()/(O.5pSRU2) (7.4)
in which SR is the lateral area of the rudder and U is the ship's resultant velocity.
For rudder, angles smaller than the stall angle st the force YR(5) on the rudder mainly depends
on the lift LR which is the force component on the rudder that is perpendicular to the. incoming
flow; see Figure 32. Aside f the lift also the resistance R along the rudder, the drag force Di in
the direçtion of the flow and the normal drag force YN perpendicular to the rudder are generated
on the rudder as shown in Figure 32.
L
Fig. 32. Schematic decomposition of the total force on a rudder..
-57-

-58-
in which CR is the chord (length) of the rudder. lt is noted that in comparing the resistance of the
high-lift rudder with that of a conventional rudder one should consider that in addition to the
resistance increment of the high-lift rudder also the resistance of the head box, which is needed
to àttach the rudder to the hull, has to be taken into account.
The resistance R is described according to the general procedures. f 9r describing the longitudinal
resistance of a Streamlined object:
RR(8) - 0.5 p SWA CTA u (7.5)
¡ri which the flow velocity UR will be described later on. In equation (7.3) SWR is the wetted surface
area of the rudder and CTR is the rudder resistance coefficient:
CTR CFR(60) (1 +kR) (7.6)
with CFR being the frictional resitance coefficient and kR b&ng the form factor of the rudder. The
effective angle of incidence e of the flow to the rudder ¡s described by:
" H (7.7)
with 8H being the effective angle of the flow due to the ship's motions relative to the zero position
of the rudder; see also equations (6.1) and (6.11).
From equation (7.5) it is seen that the rudder resistance ¡s described by the resistance coefficient
C- which depends strongly on the profile of the rudder. lt is often found for example, that, the
resistace coefficient 0TR of a high-lift rudder will be larger than that of a rudder with more
conventional profile; see e.g. Figure 33. From the results in Figure 33 it ¡s seen that the increase
of resistance coefficient CTA of the high-lift rudder does not change over a wide range. of
Reynolds numbers RnA of the rudder:
UR CR(7.8)
V

o 020
0.016
0.012
CT
0.008
0.004
o
5.75
Convenhid rudder IIh Noca profileHigh lLft ruer Att Fish-toil profiléFroudesldn friction
6.0 6.25
log Rn
-59-
Fig. 33. Resistance coefficients of two types of rudders for a wide 'range of Reynolds numbers.
Attention should be given to the fact that when the flow approaches the rudder under sorné angle
of attack then the resistance coefficient C in equation (7.6) 'will increase a little 'due Sto' the
circulation around the rudder; see e.g. Abbott and von Doenhoff (1965):
CFR(6e) = CFR (1 +Cl:Sjfl2(6e)SR/SWR) (7.9)
¡n which SR is the lateral area of the rudder. The lift coefficient Cl5 is described as follóws:
lithe effective rudder angle is smaller than the stall angle then the lift force L (perpendicular to
the incoming flow) is determined by: '
LR() = 0.5 p SR CI5 u Sfl(e) (7.10)
in which Cl5 is the lift coefficient which depends among other things on the profiJe and the plan
form of the rudder. The influence of the profile is for example shown in Figure 34 in which the
measured lift coefficient is 'presented of a rudder with a conventiónal profile (NACA profile), and
that of a rudder with a fish-tail profile. The results in Figure 34 were derived fröm experiments
with deeply submerged rudders both having the same geometric aspect ratio of Ag = '1.5. These
test results confirm the assumption that the influence of the Reynolds number ön the lift
6.5 6.75

coefficient is negligible. This means that when 30% higher lift is found on a rudder model with a
particular profile then also 30% higher lift is expected for the full scale rudder of that profile.
A
CI6
p---e--4
3
2
0
it Ae C16(Ae ce)Cl5 =
C15(Ae=Qo) +7tIAe244
- ..(Fn) withAg Ag
Conventid rudder v.4th Noca profile
High litt rudder v.ith Fish-toil profile
from which it is seen that the lift coefficient Cl8 increases with increasing effective aspect ratio
Ae. For rudders piercing the free water surface one finds that the ratio Ae/Ag between the
effective aspect ratio and the geometric aspect ratio depends on the Froude number FnR related
to the rudder conditions:
FnR =uR/g.cR
-60-
(7.12)
(7.13)
5.75 6.0 6.25 6.5 6.75
lOg
Fig. 34. Lift coefficients of two types of rudders for a wide range of Reynolds numbers.
The influence of the plan forni on the lift coefficient Cl5 is expressed for instance by the
geometric aspect ratio Ag:
Ag =SRIc (7.11)
According to Whicker and Fehlner (1956), one finds the following description of Cl8 as a function
of the aspect ratio:
e ao e
a

From the experimental results in Figure 35 it is seen thát t relatively low speeds (harbor
maneuvering) the rudder will be more effective (larger relative effective aspect ratio) than for the
service speed condition. To elucidate the results ¡n Figure 35 one considers a flow velocity to the
rudder of about 8 rn/s. From Figure 35 one finds that the effective ¿pect ratio Will nearly be. equal
to the geometric aspect ratic. (Ae/Ag-1) for all rudders with a chord smaller than 2.9 m (FnR>l .5)
which holds for a large category of ships.
In equations (7.5) and (7.10) UR is the velocity of the flow to the rudder. If there is no propeller
in front of the rudder then:
UR =u(l WR) (7.14)
in Whiòh WR is the wake fraction of the flow to the rudder.
However, ¡n case of a propeller in front of the rudder then UR ¡s largely influenced by the thrust
of the propeller; see e.g. Molland and Turnock (1993).
UR Up +CDUAUP (7.15)
-61
0 0.5 1.0 1.5FnR -
Fig. 35. Influence of the Froude number on the effective aspect ratio relative to the geometric
aspect ratio for surface piercing rudders.

in which uf, = u(1-w) is the incoming flow to the propeller and Up is the increase of flow velocity
by the propeller. The coefficient CDU describes the effectiveness of the velocity increment induced
by the propeller on the rudder and depends for instance on the propeller diameter D relative to
the rudder height bR (ratio Dp/bR), on the distance of the rudder to the propeller and on the lateral
position of the rudder in the propefler stream. For more details one s referred to Kijima (1993),
Kose (1993) and Molland (1993)
Theoretically the velocity increment Up at a large distance behind the propeller follows from:
Taking into account, the: velocity increment due to the propeller one finds:
1. The effectiveness Y5' of a rudder behind a propeller with positive thrust T will be
significantly larger than that of a rudder ¡n the free stream; see eg. Figure 36.
. The effectiveness Y5' of a rudder behind a propeller will increase at increasing propeller
thrust T suôh as occurs when the propeller RPM is larger than that at a stationary speed.
This condition will occur when during maneuvering the ship's speed will be reduced due to
the increased resistance while the propeller RPM has not decreased accordingly. This
condition will also occur whèn at low speeds (harbor maneuvering) the propeller RPM is
increased during a restricted period of time; see e.g. Hooft (1970). From the results in Figure
37 for a 200 kDWT tanker one finds for example that the rudder effectiveness Y5 at a lòw
speed of Fn 0.0725 can be doubled by increasing the propeller revolutions from 40 RPM
(SPP condition .at Fn = 0725) to 80 RPM.
I 2 8T¿upIup+
2
-62-
- Up (7.16)

Y..
0.010 -
0.0075
0.ô05
0.0025
0.0o
2 semi baianced rudders r
single balanced rudder
10 20 30
rudder angle 5
-63-
40 50
Fig. 36 Non-dimensiOnal lateral force as a functioñ of the rudder angle. for two rudder
configurations behind a slender twin screw ship; from measurements at shallow water
depth of 1.2 T.
3. The effectiveness Y5' Of a rudder behind a propeller will be reduced significantly during the
stopping procedure. In this condition the propeller thn.st is decreased significantly and can
even become negative. From the results in Figure 37 for a 200 kDWT tanker one finds for
example that the rudder effectiveness Y5 at the service speed of Fn = 0.145 cari be reduced
by about 70% by deçreasing the propeller revolutions from 80 RPM (SPP condition at
Fn 0.145) to 30 RPM. With the propeller ¡n the backing. mOde it even may o cur that the
rudder will have no control effect at all (Y,0) suòh as has been described e.g. by Yoshimura
(1993).
2 semi balanced rudders single balanced rudderbehind the propellers in the free stream

LO5
o
-64-
Fig. 37. Rudder generated side force (expressed by the derivative Y&) on a 200 kDWT tanker
with single screw-single rudder configuration for various combinations of ship speed and
propeller RPM.
Another contribution to the rudder force is the drag in the direction of the flow. This force is the
so-called lift induced drag Di which is excited by the loss of pressure over the tips of the rudder.
This force is determined by:
DIR(60) = 0.5 p SR COiR UR S2(e) (7.17)
in which the lift induced drag coefficient CDiR of the rudder is related to the lift coefficient Cl5
according to Whicker and Fehlner (1958):
with the coefficient e being Oswald's efficiency factor. When comparing the measured coefficient
°DIR for the conventional profile in Figure 38 with the measured lift coefficient Cl5 in Figure 34
then one finds e=1 for the conventional profile. Applying this same value for the high-lift profile
then one finds that the effective aspect ratio of that rudder is about 30% larger than the geometric
o 20 40 60 80 looopeIIer RPM .
2
COIR -e irAe
(7.18)

aspect ratio. This finding for the effective aspect ratio is in agreement with the earlierfinding that
the 30% increment of the lift coefficiênt of the high-lift rudder is caused by the increment of the
effective aspect ratio. In Figure 39 the relation between the resulting lift coefficient CL and the
resulting drag coefficient CD for varying rudder angles is shown for two rudder forms.
Irrespective of the effective angle of incidence a normal force YN is generated on the rudder due
to the lateral drag coefficient CN perpendicular to the rudder:
YNR(Ö) 0.5 p SR CN U sin(50) I Sfl(6) I (7.19)
in which the coefficient CN depends on the plan form and profile of the rudder:
CN = C(tm/c,Ae,rounding of tips) (7.20)
in which tmR is the maximum thickness of the rudder at half height. For mQre information one is
referred to e.g. Winter (1935), Wadlin (1955) and Whicker and Fehlner (1958).
Conventlol rudder Mth Naco profile
- - -e - High lift rudder 'with Fish-toil profile
-65-
5.75 6.0 6.25 6.5 6.75
IORflp
Fig. 38. Lift induced drag coefficients of two types of rudders for a wide range of Reynolds
numbers.
o- - -* - -- 2_. -o o
u
4
f312
coi
o

0.12
'D
0.04
log RnR= 6.4584
-xRR sin(Ö) - XR Dsin(5H)
In Figure 40 the overall forces due to a rudder angle are given which were measured for three
different stem förms shóWn in Figure 14. From the results in this Figure 40 it is seen that also for
a short fUll shi nò influence can be. discerned of the stem. form on the rudder elf ectivertess.
O Noca poflle
O Fish - toiIpotiI
Fig. 39. Relation between the non-dimensional lift añd drag at váring rudder ancles.
Taking into account the various force contributions n the rudder one finds the following resultant
rudder force components in the ship fixed coordinate system:
-66-
XR = -Rcos(6) Dcos(H) - YNsin(5) -Lsin(5H) (7.21)
- YN cos(ö) + L COS(ÖH) - R sin(6) - D Sifl(ÖH) (7.22)
XR VN cos(6) + (XR + XHÖ aH) L COS(&H)(7.23)
010.2 0.4c.

-0.001Y..
-0.002
0.001
o
-0.003
-0.004
o
conventional
pram form
moderate pramform
I t
conventional
0.00l - moderate pramform
-67-
0 5 10 15 20 25 30 35 40
3
pram form
-0.002 t t
0 5 10 15 20 25 30 35 40
3
Fig. 40. Rudder effectiveness for various stern forms of a short full bodièd ship.
The formulations in the above considerations were based on the assumption that the effective
rudder angle is smaller than the stall angle 6. In this respect the stall angle is defined .to
correspond to the angle of incidence of the flow to the rudder at Which the lift will not be
developed completely. This aspect is clearly observed for a profile in the free stream. In that case
it is found that the stall angle will increase at decreasing effective aspect ratio Äe. However, for
the performance of a rudder behind a ship it appears that the stall angle ¡s even larger than in
the free-stream condition. lt ¡s assumed that this phenomenon corresponds to the large stall angle
of a trim flap behind a flapped rudder. In general ¡t appeajs that there ¡s no need to consider
stalling as a serious aspect of the effectiveness of a rudder.

In Figure 41 the non-dimensional transverse force and yawing moment is shown for various
combinations of drift angle and rudder angle 3. The results in this figure are derived from
captive model tests with a short full bodied hull with different stem forms as shown in Figure 14.
With respect to the results in Figure 41 the following remarks can be made:
At a rudder angle to starboard (3<0) the ship will turn with the bow to starboard while drifting to
port «3<0). Due to this combination of negative drift angle and negative rudder angle a positive
yawing moment is generated. From Figure 41 it is seen that the yawing moment will reduce by
reducing the rudder angle. Even when the rudder is put in the opposite position then the yawing
moment will decrease continuously when the drift angle remains constant. This continuous
change of the yawing moment as well as that of the lateral force shows that it is not possible to
discern any stall phenomenon even not at 40° rudder angle to starboard while the ship is drifting
to port at -40° drift angle.
The other remarkable aspect from the results in Figure 41 follows from the fact that there ¡s hardly
any difference in the transverse force or yawing moment for the three different stern
configurations. This means that also with respect to the effectiveness of the rudder in the
opposing direction no influence of the stern form is found.
-68-

0.04
A
Y
D
o
002
pramform aiterbody
a
+
D
+
A
Q
+
A
o
+ + +
A
o
A
D
A
+
A
a o
moderate pramform afterbody
convential afterbody
-69-
00 10
r0.005
o
pramform afterbody
D
o
moderate pramform afterbody
+
A
C
+
A
o
o
+
A
o
o
A
Q
A +A
QD
¿ I
A
o
+
A -30D
o
+ +
A A
a
convential afterbody
+
o
++
A 4-A
o oI I Ç
+4.
D
AD A Ao
o
I I I
+
o
-40 -30 -20 -10 0 10 20 30 40 40 -30 -20 -10 0 10 20 30 40rudder angle rudder angle
-40 -30 -20 -10 0 10 20 30 40 -40 -30 -20 -10 0 10 20 30 40rudder angle rudder angle
Fig. 41. Non-dimensional side force and ya wing moment n a short full bodied ship as a function
of the stem form, the drift, angle 3 (pOsitive when drifting to starboard) and rudder angle
8 (positive when rotated to port).
40 .30 -20 -10 0 10 20 30rudder angle
-40 -30. -20 -10 0 10 20' 30
rudder angle
t I I I ¿ e o ? f
+ + 4. ++
4.++ +
A A A
A A A A A A
D Q o D o o o Q
I I I
++A
A
a o
0.0 10
r.4
0.005 o
o
+A
+
A p--30D
4. 0A
+
A
A+
4-
A
DD
o oI I 'P ¿
+ +D D
+++
++
A
+
A A£AA
A
QD aaDDoD
, I¿
0.04
r..02
0.04
r.0.02
0.0 10
r.0.005
o

8. PREDICTING THE MANEUVERABILITY IN THE DESIGN STAGE
Executing free running model tests is òonsidered to be the most reliable method nowadays for
predicting the ship's maneuvering performance; se e.g. Figure 42. The reliability of this method
is based on the vast experience gained with this technique.
Except for a few special cases no significant scale effects have been found on the results derived
from free running model tests in deep water; see e.g. Nikolaev and Lebedeva (1979), Oltmann
etal. (1979), Kose et al. (1980), Yoshimura et al. (1981).
Often, the most' significant scale effect influencing the maneuverability is supposed to originate
fröm the scale effeöt on the resistanöe. As a result the propeller load during the free running
model test is too high relative to the full scale, condition. One then assumes that the rudder
effectiveness will be relatively high due to the relatively higher propeller load. Based on this
reas6ning one often assumes that the results of the free running model tests will be too optimistic.
Hôwever, no systematicproof for this statement has been found yet.
Full scale trials
Model tests
-70
Fig. 42. Results of 200/200 zig-zag maneuver for á short full bodied ship as derived from the free
running model test in comparison to the sea fríal.

In literature some cases are mentioned in which the ship's maneuverability appeared to be very
unsatisfactory while it was suggested that an acceptable maneuverability would have been
predicted from free running model tests if they had been executed. In order to explain this
assumed discrepancy a study was performed to ascertain the origin of possible scale effects. For
this purpose systematic free running model tests have been carried out for a short full bodied
ship; L,/B = 5.48 and 0B =0.814.
During the sea trials large overshoot angles of over 40° had been measured during 100/100 as
well as 200/200 Z-maneuvers. Based on these results the maneuverability of the ship was
cónsidered to be unacceptable and that additional means had to be applied to the ship for
improving its maneuverability. In the study afterwards, free running model tests for this ship were
performed for both the self propulsion point of model (overloaded prçpeller) and for the self
propulsion pôint of ship (propeller load of model equal to that of the ship).. The tests with the free.
running model at the self propulsion point of ship have been executed with the help of a.wind
ventilator on the deck of the model. The thrust of the wind, ventilator was cöntrolled to correspond
to the friction deduction force Fd(u) as a function of the model speed. The friction deduction force
is determined by the difference (scale effect) between the resistance coefficient of the model and
that of the ship.
In Table 3 the results of the Z-maneuvers are presented. From this table it is seen that the results
of the standard free running model tests (SPP of modél) show unacceptably large ovCrshoot
angles. Based on the. results of these standard model tests it is concluded that the
maneuverability is unacceptable as had already been found from the sea trials. From Table 3 it
is furthermore seen that the effect of the propeller loading on the ship's maneuverability ¡s
negligible. From these model tests no indication coUld be derivéd about scale effects in the
maneUvering performance of free running models.
-71-

Table 3. Results frOm Z-maneuvers with a free running model of a short fui! bodièd ship
at constant RPM.
Table 4. Results from turning circle, tests with a free running model
of a short (ui/bodied ship at constant RPM.
-72-
bescription
of maneuver
- First overshoot angle Second overshoot angle
SPP model SPP ship SPPmode-
SPP ship
20/20 P
2Ol20 SB
.1.0/10 P
10/10 SB
42
31
48
21
48
32
. 48
-
20
30
28 .
20
28
>31
-
Description . 'Advance/L Tactical diameter/L
of maneuver'SPP model SPP Ship SPP model SPP ship
35 P; 2.62 2.77 2.00 2.01
35 SB 2.97 3.11 2.29 2.28
20 P ' 2.89 2.98 2.69 2.72.
20 SB 3.31 . 3.45 3.23 3.26

In Table 4 the results of 'the turning circle tests are presented. From the results in this table it is
seen that only a small effect of the propeller loading is noted with respect to the advance while
no effect is noted on the tactical diameter.. No exact valves from sea. trials are available except
that the turning circle diameter is in between and 2.5L?p. However, for a comparable ship
hardly any difference was found between the turning circle characteristics from free running model
tests and those from sea trials.
In the above the results of free running model tests have been presented while the propeller
revolutions were kept constant during the whole maneuver. However, during sea trials the,
propeller revolutioñs will drop due t an incremònt of the propeller loading as the ship's speed will
decrease while maneuvering. The reduction of propeller RPM Will depend on the type of the main
power plant. Fora diesel engine the reduction of revolutions will approximately correspànd to the
condition that the torque will, remain constant. Èor a turbine plant the revolutions wiil
approximately be reduced according to 'the condition of constant power.
In order to simulate the ship's maneuverability correctly during the free running model tests it will
be necessary to adjust the 'propeller revolutions to its loading. For this reason two additional
series of free running model' tests have been executed with the above short full bodied hull: (1)
with, the RPM adjusted such that the propeller torque remains constant during each maneuver,.
and (2) with the RPM adjusted such that the propeller power remains constant during each.
maneuver. These additional tests have been performed for the SPP of ship with the aid of a
ventilator on deck of the model. '
The results of the additional tests with adjustments of the propeller revolutions are given in Tables
5 and 6. At the "constant power" tests an RPM reduction of maximal 18% was found while during
the "co'nstant torque" tests the RPM dropped maximally 27%. From the results in Tables 5 and
6 in comparison to the results ¡n Tables 3 respectively 4 one finds that:
-73-

Table 5. Results from Z-maneuvers with a free running model at SPP of ship.
Table 6. Results from turning circle tests with a free running model at SPP of ship.
-74-
Description
of maneuver
First overshoot angle Second overshoot angle
Constant power
18% RPM
reduction
Constant torque
27% RPM
reduction
Constant power
18% RPM
reduction
Constant torque
27% RPM
reduction
20/20 P
20/20 SB
10/10 P
10/10 SB
49
40
48
31
51
39
70
34
18
28
-
>50
20
27
-
>50
Description
of maneuver
Advance Tactical diameter
Constant power
18% RPM
reduction
Constant torque
27% RPM
reduction
Constant power
18% RPM
reduction
Constant torque
27% RPM
reduction
35 P
35 SB
20 P
20 SB
2.87
2.87
3.46
3.29
2.94
2.82
3.41
-
2.06
2.29
2.95
2.99
2.08
2.25
2.91
-

The ovórshoot angles during the Z-maneuvers with adjustments in propeller RPM are only
a little larger than those derived trbm the tests with cànstant RPM. From both test. series the
overall impression is that the ship's maneuverability is unacceptable.
No clear difference can be found ¡ri the advance and tactical diameter during the turning
circles with adjustments in propeller RPM and those derived from the tests at constant RPM.
Only the final speed and rate of turning wiJI be lower in the turning circle with reductions in
the propeller RPM than those encountered in the tests with constant RPM.
The overall conclusion from the above described study is that even forshort full bodied ships no
obvious scale effect can be observed in the results from free running model tests. The results of
these tests correspond well with full scàle observations.
In the initial design stage use is made of computer simulations before executing the rather costly
free running tests. For this purpose MARIN' developed the simulation prögram SURSIM in which
all hydrodynamic properties are derived from empirical mèthods as have been described in the
previous sections. In SURS IM the non-Ilnear hull forces are based on the concept of longitudinal
distribution of the cross flow drag coefficient which varies With the changing velocity cOnditions
while maneuvering.
The simulation program has been validated by means of:
Comparing calculated forces at given velocity combinations With the results from captive
model tests either in a towing tank or in a rotating arm facility; see e.g. Figure 20.
Comparing calculated maneuvers at the SPP of model with the results from free running
model tests; see e.g. Figure 43 and Tables 7 and 8 for a full bodied ship.
Comparing calculated maneuvers at the SPP of ship with the results from sea trials; see e.g.
Figure 44.
-75-

// /
Initial position
Model tests
SURSIM calculations
-76-
,
Fig. 43. Results of turning circle maneuver at 350 rudder angle for a short full bodied ship as
derived from computer simulations in comparison to the free running model test.
- -/
-/

Table 7. Results from Z-maneuvers derived frOm model tests and computer simulations for a
shOrt full bodied ship.
-77-
Description
of maneuver
First overshoot angle Second overshoot angle
Model tests Simulations Model tests Simulations
SPP of model;
constant RPM
20/2Ó P 42 4Ö 20 47
20/20 SB 31 40 30 47
10/10 P 48 35 28 63
10/10 SB 21 35 >55 63
SPP of ship;
conslant RPM
20120P 48 46 20 54
20/20 SB 32 46 28 54
10/10 P 48 47 >31 80
10/10 SB - 47 - 80

Table 8. Results from turning circles derived from model tests and computer simulations for a
short full bodied ship.
-78-
Description
of maneuver
Advance Tactical diameter
Model tests.
Simulations Model tests Simulations
SPP of model;
constant RPM
35 P 2.62 2.53 2.00 2.03
35 SB 2.97 2.53 2.29 2.03
20 P 2.89 2.94 2.69 2.62
20 SB 3.31 2.94 3.23 2.62
SPP of ship;
constant RPM
35 P 2.77 2.67 2.01 2.11
35 SB 3.11 2.67 2.28 2.11
20 P 2.98 3.10 2.72 2.69
20 SB 3.45 3.10 3.26 2.69

SURSIM calculations = Full scale trials
Fig. 44. Comparison between the results from computer simulations with those from sea trials
with respect to the turning circle at 350 rudder angle.
From the results shown above about the validation of the computer program it is concluded that
in the initial design stage a good impression can be achieved about the ship's maneuverability
by using a computer simulation program such as SURSIM.
When in the initial design stage only the main dimensions are available while the local details of
the hull form are not yet known then use can be made of computer simulations using only very
rough estimates of the hydrodynamic characteristics based on the experience with available
hydrodynamic characteristics derived from previously designed ships. This method will be
discussed in more detail in the next section.
-79-
C8 0.56 0.60 0.62 0.75 0.76 0.81 0.83
L/B 6.60 5.13 5.43 6.39 7.27 6.02 6.13

9. TEST CASE
In this section a procedure will be. given to apply the information presented ¡ri this paper for
evaluating the ship's maneuverability in the initial design stage by means of computer simulations.
In this stage of the design no hydrodynarnic information is yet available from captive model tests
such as PMM tests or rotating arm tests. In the procedure to be presented the hydrodynamic
characteristics will be derived from a combination of hydrodynamic data available from earlier
model tests and existing empirical methods.
A full wide beam ship will be considered of which the main dimensions are characterized as
follows:
the length-beam ratio should be minimal: therefore Lw/B = 4 is chosen,
the beam-draft ratio should be maximal: therefore BiT = 3.75 is chosen,
the block coefficient is chosen to be: CB = 0.825.
Furthermore it is chosen that the ship with these parameters should be as large as possible. For
all kinds of reasons it is decided that a width of B = 75.00 m is maximally feasible. In this way
a ship is considered with the following main dimensions:
= 300.00 m
B = 75.00m
T = 20.00m
CB = 0.825
XG = 7.50 m; position of center of gravity ahead of the reference point O amidships.
-80-

The ship will be driven by two propellers with the following characteristics:
D =1O.25m
P/D = 0.7
AE/Ao = 0.57 (blade area ratio)
z =4
The propeller shafts are contained in a twin gondola configuration. Behind each propeller a rudder
will be mounted. The dimensions of each rudder are:
Height bR = 12.5 m
Chord CR = 6.0 m
Lateral area SR = 75.0 m2 (1.25% of the hull lateral area
From the information presented by Holtrop and Mennen (1982) one finds that the wake fraction
will be w = 0.3 while the thrust deduction fraction will amount to t = 0.22.
The set-up of the mathematical model Will be based on the review in Section 3. The various force
components (i.e. hull forces, propeller forces and rudder fOrces) in equation (3.8) will be described
here in detail.
Bare hull forces
The ship's resistance is approximated according to Holtrop and Mermen (1982):
XH(u) = -(3.057 E4).0 - (2.221 E4).u2- (1.019 E3).u3 (N) (9.1)
-81 -

For the derivation of the other bare hull hydrodynamic coefficients use is made of the values from
measurements performed with a comparable model. For this reference model use is made of
model D that has been described by Roseman (1987). The main characteristics of the reference
model D are given ¡n Table 9 ¡n comparison with the characteristics of the ship considered here.
Table 9. Main characteristics of model D of which the hydrodynamic coefficients
are known from model tests.
In Table 10 the hydrodynamic coefficients of the new design are shown as derived from the
reference ship D with the aid of empirical methods. The derivation is as follows (see also Kose,
1993): Each of the hydrodynamic coefficients HCND for the new design is derived from the
available coefficient HCD of model D as shown in the following extrapolation. If the coefficient
HCD from the measurements has the same sign as the coefficient HCD(emp.) from the empirical
method, then:
HCNDHCND(emp.)
*HCDHCD(emp.)
(9.2)
however, ¡f the sign of both coefficients are opposite then the following extrapolation is applied:
HCNO = HC0 + (HCND(emp.) - HCD(emp.)) (9.3)
-82-
Main characteristics Model D (reference) New design
LW/B 4.500 4.000
LWrr 13.50 15.00
B/I 3.000 3.750
CB 0.850 0.825
xGILPP +0.025 +0.025

Table 10. Review of derivation of bare hull hydrodynamic coefficients.
-83-
Ship D Empiric
method
described
New design
Experimental Empiric Erripiric Recommended
jñ text
-0.001 72 -0.003025 *1 -0.004262 -0.002423
YÇ -0.02473 -0.02169 *2 00iM2 -O.Ó1872
-0.00035 -0.001766 *2 .. -0.001693 -0.00034
N" 0.000.10 -0.001563 *2 -0.001691 -0.00003
Ñ" 0.00i685 -0.001106 *2 -0.000746 -0.001136
Xvr" 0.01855 0.02473 *3 0.01872 0.01404
0.00164 -0.00252 *3 -0.00628 -0.00212
X.y." 0.*3
- 0.
-0.0235 !0.03683 *4 -0.03321 -0.02119
-0.05857 -0.04630 *4 -0.04111 . -0.05200
0.00788 0.00700 *4 Ö.00688 0.00764
Yr"IrI 0.00225 0.00201 *4 0.000364 00004t- - -0.01851 -0.01851
''vvr" - - 0.02133 0.02133
N" . -0.01273 -0.01097 "4 -0.008889 -0.010315
N"II 001441
-0.00582
-0.00133
-0.00430
"4
"4
-0.001413
-0003615
0.01433,
-0.004893
Nr"lrI 0.00049 0.00033 *4 0.000875 . 0.00006
- *4 0.00400 0.00400
Nwr" - - 0.01 673 -0.01 673

The empirical methods used in Table lo for the prediction of the hydrodynamic coefficients are
as follows:
(1) For the derivation of the longitudinal added mass coefficient -X use has been made of the
method presented by Soding (1982).
(*2) For the derivation of the lateral added mass coefficient -Yo, -Yr, -N and -N use has been
made of the method presented by the lITO 1984.
(3) For the derivation of the longitudinal damping coefficients use has been made of the
following approximations:
- X = -Y - D ¡n which the longitudinal drag D ¡s determined by:
D = CDV.(O.5 p.L,.T) with: CDV = CLV2.(LPp/2T)/it? and
CLV =
- Xvr = -Y according to Norrbin (1971).
(*4) For the derivation of the sway and yaw damping coefficients use has been made of the
method presented by Kijima (1993).
lt should be noted that the bare hull coefficients ¡n Table 10 may be slightly affected by the twin
gondola configuration.
Propeller forces
From Kuiper (1992) one finds the following description of the performance of each propeller:
K.1. = 0.294 - O.247.J - O.227.J2 + O.0693.J3 (9.4)
in which the following notation is used:
K.1- = T/(p.D4.n2) and J = u.(1-w)I(n.D) (9.5)
The total longitudinal force generated by the propellers amounts to:
X = (l-t)(T) (9.6)
-84-

Rudder forces
For each rudder the following force components are described. The resultant drag in the ditection
of the incoming flow, while the rudder rèsistancò is incorporated ¡n the total resistance of the ship:
b - X55.u.sin(69)2 (9.7)
The resultant lift perpendicular to the incoming flow:
L h1'Y8.U.SIfl(6e) (9.8)'
In these equations use ¡s made of the following characteristics:
The effective rudder angle 3e amounts to:
6e 16 6H (9.9)
with 8 being the rudder angle while 6H is the flow deviation due to the ship's motion at the
location of the rudder:
6H 1CdbI3 Cdr1 (9.10)
in which ß = atan(v/u) and y = r.L./u. For the prèsent configuration use is made of
0db = Cdr = 0.26 according to Kijima (1,993).
- The effective velocity UR of the fløw at the location of the ñidder in the above equations about
the rudder drag D and lift L is derived from:
UR Up. + C0Up
in which CDU = 0.7 Dp/bR and in which. the incremental propeller velocity Up is derivedfrom:
-85

I 2Up
+ 2-Up
p.7t.Dp
The rudder coeffiòients X and Y8 in the äbove equations for the drag and lift are derived
from
-O.5pSC and O5pSRCIs (9.13)
in which the lift coefficient Cl6 = 2.678 follows from Whicker and Fehlner (1958 )while using
an effective aspect ratio A0 equal to the geometric aspeçt ratio Ag hR/cR = 2.083. The drag
coefficient C0 = 1.096 is derived from:
=
From the drag and lift on each rudder one finds the following force contr butions XR, R and
yawing moment NR of the rudders:
XR E(D COS(H) - L Sfl(&H))
= E(D Sifl(8H) + (1 + ah) L CÓS(3H))
NR [YR<R + (XR ai...XH) L COS(6H) + XRD 1(6H)]
in which aH = 1 and XH = O follow from Kijima (1993).
Having inserted the above hydrodynamic characteristics ¡n equation (3.8) will lead to a
mathematical model by means of which the ship's maneuvering performance can be predicted;
see the simulation results in Table 11. From these results it ¡s seen that the ship is rather sluggish
and course unstable.
-86
(9.12)
(9.14)

Table 1. Review of the maneuvering perfOrmance of a wide beam tanker LB=4
with a twin screw and twin rudder arrangement
* TURNING ABILITY AT 35 DEG RUDDER ANGLE
- advance = 1203 m (4.01 L)
- tactical diameter = 1405 m (4.683 L)* COURSE INITIATING ABILITY AT 10 DEG RUDER ANGLE
- travelled distance at 10 deg change of heading =. 606 m (2.02 L)* COURSE CHECKING ABILITY
10/10 Z-maneuver (LN 38.9 sec)
first overshoot = 9 deg
second Overshoot = 6 deg20/20 Z-rnaneuver
first overshoot = 14 deg* COURSE STABILITY
- height of hysteresis = 2 * 0.12 deg/sec = 0.24 deg/sec
(cónstànt räte of turning 0.26 deg/sec at 3 = 35 deg)
-87-

For the assessment of the ship's maneuverability one now compares the results in Table 11 with
the 1MO criteria in Table i It appears that the ship's maneuverability satisfies the 1MO criteria
except for the course initiating ability at lo deg. However the difference with the 1MO criterion for
this aspect is negligible.
It is expected that the course instability will not have too much effect on the course keeping ability
during stopping because of the fact that there will be no serious asymmetric disturbance clue to
the propulsion as the ship is equipped with two propellers.
The overall conclusion with respect to the maiieuverability of the neWly designed wide beam ship
reads: Based on the apprbximated hydrodynamic coefficients one finds, in the initial design stage,
that thè maneuverability öf the wide beam ship ¡s marginal and that fürther attention should be
given to reach a more reliable prediction of the maneuverability by applying either:
mre precise prediction methods such as SURSIM ¡n which use is made of the concept of
the cross flow drag coefficient, or
more precise mathematical models based on experimentally derived hydrodynamic
coefficients, or
free running model tests.
For a fuilher evaluation of the predicted maneuvering performance a sensitivity analysis will be
useful to ascertain the effect of the uncertainties in the estimated hydrödynarnic coefficients. For
the present study the following aspects have been considered:
The consequence of the rudder effectiveness: see coefficient Y5 in equatiOns (9.8) ¿.nd
(9.13). Decreasing Y5 with 20% leads to a 4.7% increase of the advance and a 5.5%
increase of the tactical diameter. This means that for this ship an uncertainty in the rudder
effectiveness expressed by the coefficient '1's will have some effect on the acceptability of the
ship's maneuverability.
-88-

The. consequence of the flow straightening effect while turning: see coefficient 0dr fl equation
(9.10). Increasing Cdr with 20% will lead tO an increment of 0.7% in advance and an
increment of 1:. 1 in the tactical diameter. This means that the, uncertainty in the flow
straightening while turning expressed by Cd,. will have hadly any effect on the predicted
maneuverability.
The consequence of the propeller flow acceleration: see cOefficient CDU in equation (9.11).
Decreasing CDU with 20% leads to a 3.0% increase of the advance and a 4.3% increase of
the tactical diameter. This means that the uncertainty in the propeller thrust on the rudder
expressed by the coefficient CO3 will have sorné effect on the acceptability of the ships
maneuverability.
If it is found from the additional moré precise studies that the maneuverability doés not satisfy the
1MO criteria then it is expected that the ships maneuverability can easily be improved to meet
the 1MO criteria by increasing the rudders a little.
From the above considerations it is concluded that it will be possible to design a wide beam ship
with the above dimensions with a satisfactory maneuvering performance.
89-

10'. CONCLUSIONS
In this paper a ròview is given of the hydrodynarnic aspects with respect to the prediction of the
ship's maneuverability in the design stage. Also the derivation of the hydrodynamic characteristics
is given for performing the prediction by means of computer simulations. For most of these
characteristics approximate descriptions have been formulated while for the others it is indicated
from which literature théy can be derived.
Fröm the descrition of the hydrodynamic characteristics and from the application in the prediction
of the ship's maneuveräbility the following conclusions are drawn:
The dèsign considerations with respect to the ship's maneuverability can be summarized as
fóllows
Some ships have an insufficient course initiating ability 'which appears from their slow
turning capacity in response to a rudder angle. These. ships are rather course stable
while the control effectiveness of the rudder(s) on these ships is inadequate. The.
maneuverability of these ships can be improved by 'applying rudder(s) with increased
coñtrol effectiveness which can be realized for example by increasing théir size or by
¡nàreasing their lift coefficient or by placing the rudders behind the propellers if the
rudders were originally placed in the free stream.
Some ships have an insufficient course checking ability which appears from, the large
overshoot angles in the zig-zag maneuver. These ships are rather course Unstable while
the stabilizing effectiveness of the rudder(s) on these ships is inadequate. The
maneuverability of these ships is most effectively improved by ap''plying fins at the outer
sides of the stern.
-90-

The initial maneuverability frOm a stráight course is described by the course stability and the
course initiating ability. These ásects are for one epart determined by the linear
hydrodynamic coefficients of the hull and for the other part by thé control effectivèness of the
rudder. From the results in Section 4 it is concluded that the linear hydrodynamic coefficients
of the hull are mainly determined, by the overall dimensions of the hull. lt ¡s shown that only
drastic changes in the hull form will affect the linear hydrodynarnic coefficients of the hull.
From the results in Section 7 various suggestions can be derived to improve the control
effectiveness of the rudder. Due attention has to be given to the fact that sometimes a
compromise has to be föund in the increase of the rudder effectiveness and the penalty in
resistance.
The maximum turning capacity of the ship ¡s toa large degree jointly determined by 'the non-
linear hydrodynamic characteristics on the hull. In Section 5 'an elaborate description is given
about the non-linear transvérse forces on the hull by means of the longitudinal distribution
of the cross flow drag coefficient. This öoefficient strongly depends on both the overall
dimensions of the hull and also the local form of the hull.
In Section 9 an elucidation is given to applying the data presanted in this paper for predicting
the ship's maneuverability in the initial design stage. For this purpose the derivation of 'all
relevant hydrodynamic coefficients has been worked oUt for a new ship design. In the
example the maneuverability of a wide beam tanker is considered. lt is shown that already
a realistic impression can be obtained about the ship's maneuverability in the design stage
when only the main dimensions of thö ship and its appendages are known.
-91-

NOMENCLATURE
AM midships section area
AP = aft perpendicular
= generalized description of the acceleration
(u,v,w,p,q,r)
a.4 = hull interaction coefficient on the rudder effectiveness
B = ship's breadth at the midships section
bR = rudder height (span)
= block coefficient; V/(LBT)
C0 corrected öross flow drag coefficient
0D(Í900)'0D(900)
CDj = lift induced drag coefficient
C0(x) = local cross flow drag coefficient
C0(n) = cross flow drag coefficient of the n-th segment of a segmented model
midships section coefficient; AM/(B.T)
coefficient of the foróe perpendicular to the rudder
resistance coefficient
= flow straightening coefficient for drifting
°dr flow straightening coefficient for turning
Cy = lateral force coefficient describing the relation between the linear lateral foçce
component and the drift: angle 3
= lateral force cöefficient describing the relation between the linear lateral force
component and the non-dimensional rate of turning y
CR = rudder length (chord)
D propeller diameter
Fn = Froude number; U/(g.L)°5
-92-
CM =
CN =
CT =

-93-
FP = forward perpendicular
F = generalized description of the force
E (X,Y,Z,K,M,N)
G center of gravity
= moment of inertia around the ship fixed z-coordinate
= moment of lateral added mass per unit length =
J = propeller advance coefficient
K = rolling moment around the ship fixed y-coordinate
= length between perpendiculars (L)
M = pitching moment
MG = metaceritric height
M I = mass matrix
m = mass of the ship
= added mass of water in the j-direction due to an acceleration in the i-direction
= lateral added mass per unit length; m' = m/(O.5pLT)
N = yawing moment around the ship fixed z-coordinate
O = center of reference; mostly at the center of the midships section
r = ship's rate of turning; yaw rate
R = resistance
Rn = Reynolds number; u L/v
Sri = lateral area of the n-th segment of a segmented model
SL = area of the underwater lateral surface
SR = lateral area of the rudder
§ = generalized description of the position
E
T = ship's draft at the midships section

-94-
t =time
t = thrust deduction coefficient
tAl = maximum thickness of a profile
u = longitudinal velocity component; U cos()
U = resultant horizontal velocity; (u2 + v2)05
y = lateral velocity component of the midships; U sin()
v(x) = local lateral velocity component at the location x
= v+xr
w = vertical velocity component
w = wake fraction
X = longitudinal force component on the ship
x = distance from the midships section in the longitudinal direction; positive when forward
of the midships section
XH5 = longitudinal position of the rudder induced hull force
Y = lateral force component on the ship
YN = side force on the rudder perpendicular to its center plane
= lateral force on the n-th segment of a segmented model
Y = lateral force per unit length YÑ
= non-linear component of the transverse force
y = lateral position; positive to starboard
Z = vertical force
z = vertical position; positive in the downward direction
= drift angle = atan(v/u); positive when drifting to starboard
= non-dimensional rate of turning; r.L,JU
6 = rudder angle; positive when turned to port
= effective angle of incidence of the flow to the rudder
=

-95-
= angle of incidence of the flow to the rudder as a consequence of the ships motions in
the horizontal plane
5st stall angle
E effective rudder angle at which the lift force will ñot be developed completely
O = pitch angle
y = dynamic viscosity of water
= distance along the ship. behind the FP
p = density of water
t ship's Ulm angle in radians; atan«TAP - TFP)/Lpp) positive when bow up
= roll angle
w = course angle relative to the earth fixed coordinate XE
V = volume of underwater displacement
where:
Primes denote that forces respectively moments have been made non-dimensional by
dividing by (O.5pLT) respectively by (O.5pL2T).
Double primes denote that forces respectively moments have been made non-dimensional
by dividing by (O.5pL2) respectively by (O5pL3)
Subscripts of physical variables denote rate of change of some quantity with respect to the
subscripted variable, thus: Y, = d(Y)/d(v).
Subscripts of items denote the relation of a quantity to the subscripted item, thus: 'H =
transverse force Y on the hull.

REFERENCES
Abbott, J.H. and Doenhoff, A.E. von, "Theory of wing sections", Dover Publications Inc., New
York, 1959
Ankudinov, V.K., "Simulation analysis of ship motions in waves", International Workshop on
Ship and Platform Motions, University of California at Berk&ey, 1983.
Ankudinov, V.K. et ai., "Assessment and principal structure of the modUlar mathematical
model for ship manoéuvrability prediction and real-time manoeuvring simulations", mt.
Conference on Marine Simulation and Ship Manoeuvrability MARSIM '93, St. John's,
Ñewfoundland, 1993.
Barr, R.A., "A reviéw and comparison of ship maneuvering simulations methods", Transactions
of the SNAME, VI. 101, 1993.
Beukelman, W., "Longitudinal distribution of drift forces for a ship model", Technical University-
of Delft, Óept. of Hydronautica, Report No. 810, 1988.
Beukelman, W., "Cross f low drag on a segmented model", Föurth International Symposium on
Practical Design of Ships and Mobile Units PRADS, Varna, Bulgaria, 1989.
Brix, J., "Manoeuyring Technical Manual", Seehafen Verlag GmbH, Hamburg, 1993.
Burchër, R.K., "DeveÌopments in ship manoeuvrability", Journal of the Royal Institute of Naval
Architects, VOl. 114, 1972.
Davidson, K.S.M. and Schiff, L.J., "Turning and course-keeping qualities", SNAME Proceed-.
ings, New York NY, 1946.
Eda, H., "Maneuvering performance of high speed ships with effect of roll motion", Ocean
Engineering, Vol. 7, pp. 379-397, 1980.
Fáltinsen, O.M., "Sea loads on ships and offshore structures", Cambridge Uhiversity Press,
Carnridge, 1990.
Fedyayevsky, K.K. and Sobolev, G.V., "Control and stability in ship design", Translation of
U.S. Dept. of Commerce, Washington DC, 1964.
-96-

Hirano, M. and Takashina, J., "A calculation of ship turning motion taking coupling effect due
to heel ¡rito consideration", Transactions WJSNA, 1980.
Hoemer, S.F., "Fluid dynamic drag", Hoerner Fluid Dynamics Inc., Albuquerque NM, 1965.
Holtrop, J. and Mermen, G.G.J., "An approximate power prediction method", LS.P., Vol. 24,
1982.
Hooft, J.P. and Oosterveld, M.W.C., "The manoeuvrability of ships at low speed", MARIN
publication No. 355, Wageningen, 170.
Hooft, J.P., "Computer simulations of the behaviour of maritime structures", Marine Technolo-
gy, Vôl. 23, ApriI 1986.
Hooft, J.P., "Further considerations on mathematical marioeuvring models", RINA. mt. Conf.
"Qn Ship Manoeuvrability - Prediction and Achièvement", London, April 1987.
Hoöft, J.P. and Pieffers, J.B.M., "Maneuverability of frigates in waves", Marine Technology,
Vol. 25, No. 4, 1988.
Hooft, J.P., "The cross flow drag on a manceuvring ship", MARIN Publication No. 93-001,
Wageningen,. 1993.
moue, S. et al.,. "A practical calculation method of ship manoeuvring motion", International
Shipbuilding Progress, Vol. 28, 1981.
1MO, "Draft resolution relating to the establishment of manoeuvring performance standards",
Document DE 34/WP.7, London, 1980.
1MO, "Interim standards for ship manoeuvrability", Document DE 36/WP.3, London, 1993.
hiC 84, "Report of the Manoeuvrability Committee", 17th ITIC Conferende, Gotheriborg,
Sweden, 1984.
ITTC 87, "Report of the Manoeuvrability Committee", 18th ITTC, Kobe, Japan, 1987.
liTC 93, "Report of the Manoeuvrability Committee", 20th ITIC Conference, San Francisco
CA, 1993.
-97-

Jacobs, W.R., "Estimation of stability derivatives and indices of varioús ship forms and corn-
pausan with experimental results", Stevens Institute of Technology, Davidson Labora-
tory Report, No 1035, Hobokën NJ, 1964.
Jones, R.T., "Properties of low-aspect ratio pointed wings at speeds below and above the
speed of sound", NACA Report No. 835, 1946.
Kapsenberg, G K, "Cross flow drag forces on 2-D sections", MARIN Report No 50956-1-DR,
Wageningen, 1989.
Kijima, K. et al., "On a prediction method of ship manoeuvring characteristics", mt. Conference
on Marine Simulation and Ship Manoeuvrability MARSIM '93 St. John's, Newfound-
land, 1993.
Kose, K. and Missiag, W., "A sytematic procedure for predicting manoeuvring performance",
nt. Conference on Marine $irnulation and Ship ManoeuvrabIity MARSIM '93, St.
John's, Newfoundland, 1993.
Kose, K. et al., "Qn the unusual phenomena in manoeuvrability of ships", Nay. Arch. and
Ocean Engineering, Vol. 18, 1980.
Kuiper, G., "The Wageningen propeller series", MARIN Publication 92-001, Wageriingen,
1992.
Matsurnoto, N. and Suemitsu, K., "Hydrodynamic force acting on a hull in manoeuvring
motion", Journal of the Kansal Society of Naval Architects, Japan, No. 190, Sept.
1983.
Molland, A.F. and Turnock, S.R., "The prediction of ship rudder performance characteristics in
the presence of a propeller", Second International Conference on "Manoeuvring and
Control of Marine Craft", Southampton U.K., 1992.
Motora, S., On the measurement of added mass and added moment of inertia for ship mo-
tions", First Symposium on Ship Maneuverability, DTMB Report 1461, Washington
DC, 1960.
Munk, M.M., "The aerodynamic forces on airship hulls", NACA Report No. 184, 1924.
-98-

-99-
Nikolaev, E. and Lebedeva, M., "On the nature of scálö effect ¡n manoeuvring tests with full
bodied ship models", 13th ONR symposiUm on ÑávâiHydrodynarnics, Tokyb, 1979.
Nomoto, K. et al., "On the steering qualities of ships", LS.P., VoI. 4, No. 35, 1957.
Ñornoto, K., "Some aspects of simulator studiés ön ship handUng", PRADS-International,
Tokyo, 1977.
Norrbin, N.H., "Theory and observations on the use of a mathematical model for ship
manøeuvring ¡n deep and confined waters", SSPA Report No. 68, Gothenborg, 1971..
Oltmann, P. et al., "An investigation of certain scale effécts in maneuvering tests with sh.ip
models", 13th ONR Symposium on Naval Hydrodynamics, Tokyo, 1979.
Oltmann, P., "Roll - An often neglected element of manoeuvring", lnt. Conference on Marine
Simulation and Ship Manoeuvrability MARSIM '93, St. John's, NeÑfoundland, 1993.
Qortmerssen, G. van, "The motions of a moored ship in waves" MARIN publication No. 510.
Rosemän D.P., editor of "The MAAAD systematic series of full-form ship models", The
Society of Naval Architects and Marine Engineers, Jersey City NJ, 1987.
Sarpkaya, T., "Separated flow about lifting bodies and ¡mpulsive flow about cylinders", AIAA
Journal 4, No. 3, 1965.
Sharma, S.D. and Zimmerman, B., "Schrägschlep- und Drehversuche in Vier Quadranten",
Schiff und Hafen/Kommandobrücke, Vol. 10, 1981 and Vol. 9, 1982.
Soding, H., "Prediction of ship steering capabilities", Schiffstechnik, Bd. 29, 1982.
Tinling, B.E. and Allen, C.Q., "An investigation of the normal force and vortex wake character-
istics of an ogive cylinder body at subsonic speeds", NASA TN D-1297, 1962.
Wadlin, J., "Hydrodynamic rectangular plates", NACA TN 2790, 3079 and 3249 or T report
1246, 1955.
Whicker, L.F. and Fehlner, L.F., "Free stream characteristics of a family of low aspect all
movable control surfaces for application to ship design", DTNSRDC Report No. 933,
Washington DC, 1958.
Winter, H., "Plates and wings of short span", NACA translation T Memo 798, 1935.

Yoshimura, Y. et al., "Steering quality and scale effect on it for 564,000 DWT ULCC", Kansai
Society of Naval Architects, Japan, No. 183.
Yoshimura, Y. et al., "Coasting manoeuvrability of single CPP equipped ship and the applica-
tion of a new CPP controller", lnt. Conference on Marine Simulation and Ship
Manoeuvrability MARSIM '93, St. John's, Newfoundland, 1993.
-100-




















