Trabajo de Fisica
30
Instituto Tecnológico de Colima Trabajo de la unidad 4 y movimientos del video proyectado en la unidad 5. Materia: Física
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of Trabajo de Fisica
InstitutoTecnológicode Colima
Trabajo de la unidad4 y movimientos delvideo proyectado en
la unidad 5.
Materia: Física
Profesor: Arturo Iván JardinesGonzález
Alumno: Bryan Iván González López
IntroducciónEn el siguiente trabajo de la materia “física”presentaré información sobre 3 importantestemas correspondientes a la Unidad 4 de lamisma asignatura, estos son: La ley de Hooke,vigas hiperestáticas y clasificación deColumnas. Después presentaré información sobre2 tipos de movimiento que pudimos apreciar enun video proyectado en clase de la unidad 5,estos son: el movimiento rectilíneo ymovimiento curvilíneo, explicando el conceptode cada uno y mostrando algunas de susfórmulas. También presentaré el concepto yexplicación breve del plano inclinado deGalileo Galilei.

Temas de Unidad4
Ley de HookeEsta ley recibe su nombre de Robert Hooke, físico británico contemporáneo de Isaac Newton, y contribuyente prolífico de la arquitectura. Esta ley comprende numerosas disciplinas, siendo utilizada en ingeniería y construcción, así como en la ciencia de los materiales. Ante el temor de que alguien se apoderara de su descubrimiento, Hooke lo publicó en forma de un famoso anagrama
La ley de elasticidad de Hooke o ley de Hooke,originalmente formulada para casos del estiramiento longitudinal, establece que el alargamiento unitario que experimenta un material elástico es directamente proporcionala la fuerza aplicada :
siendo el alargamiento, la longitud original, : módulo de Young, la sección transversal de la pieza estirada. La ley se aplica a materiales elásticos hasta un límite denominado límite elástico. Hooke estableció la ley fundamental que relaciona la fuerza aplicada y la deformación producida. Para una
deformación unidimensional, la Ley de Hooke sepuede expresar matemáticamente así:
= -k
K es la constante de proporcionalidad o deelasticidad.
es la deformación, esto es, lo que se ha comprimido o estirado a partir del estado que no tiene deformación. Se conoce también como el alargamiento de su posición de equilibrio.
es la fuerza resistente del sólido. El signo ( - ) en la ecuación se debe a lafuerza restauradora que tiene sentido contrario al desplazamiento. La fuerza se opone o se resiste a la deformación.
Las unidades son: Newton/metro (New/m) – Libras/pies (Lb/p).
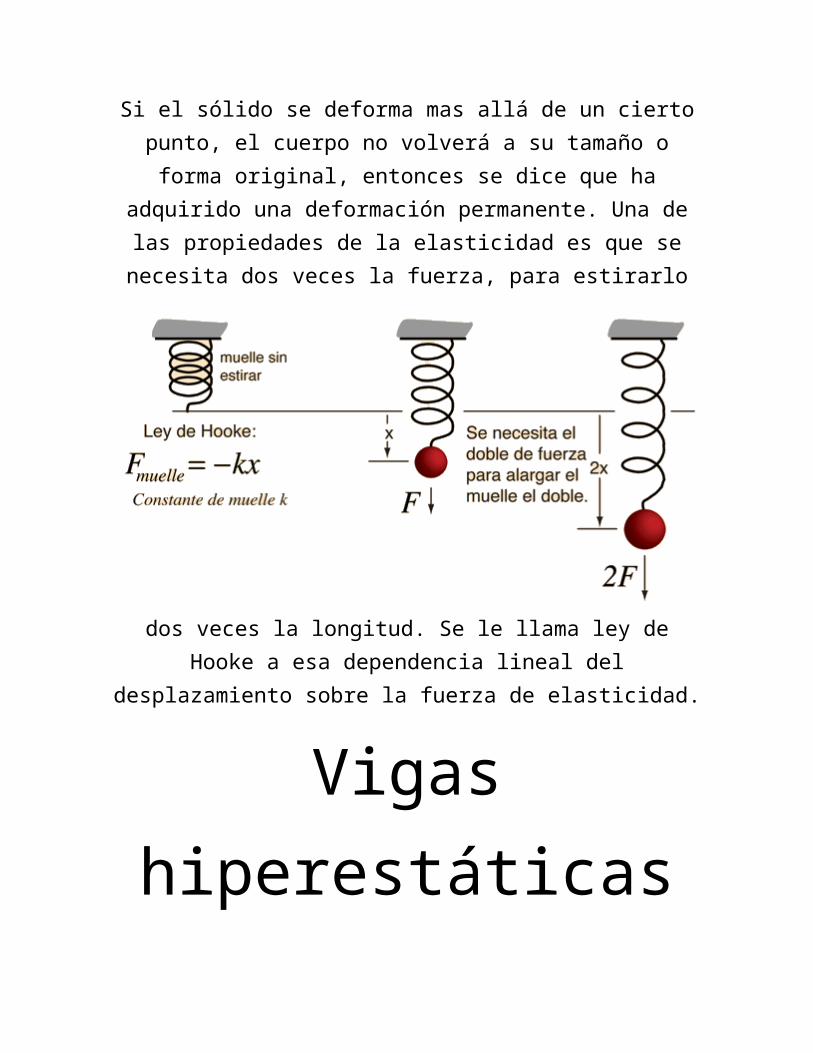
Si el sólido se deforma mas allá de un ciertopunto, el cuerpo no volverá a su tamaño oforma original, entonces se dice que ha
adquirido una deformación permanente. Una delas propiedades de la elasticidad es que senecesita dos veces la fuerza, para estirarlo
dos veces la longitud. Se le llama ley deHooke a esa dependencia lineal del
desplazamiento sobre la fuerza de elasticidad.
Vigashiperestáticas
Una estructura es hiperestática oestáticamente indeterminada cuando está enequilibrio pero las ecuaciones de la estáticaresultan insuficientes para determinar todaslas fuerzas internas o las reacciones. Unaestructura en equilibrio estable que no eshiperestática es isostática. Existen diversasformas de hiperestaticidad.
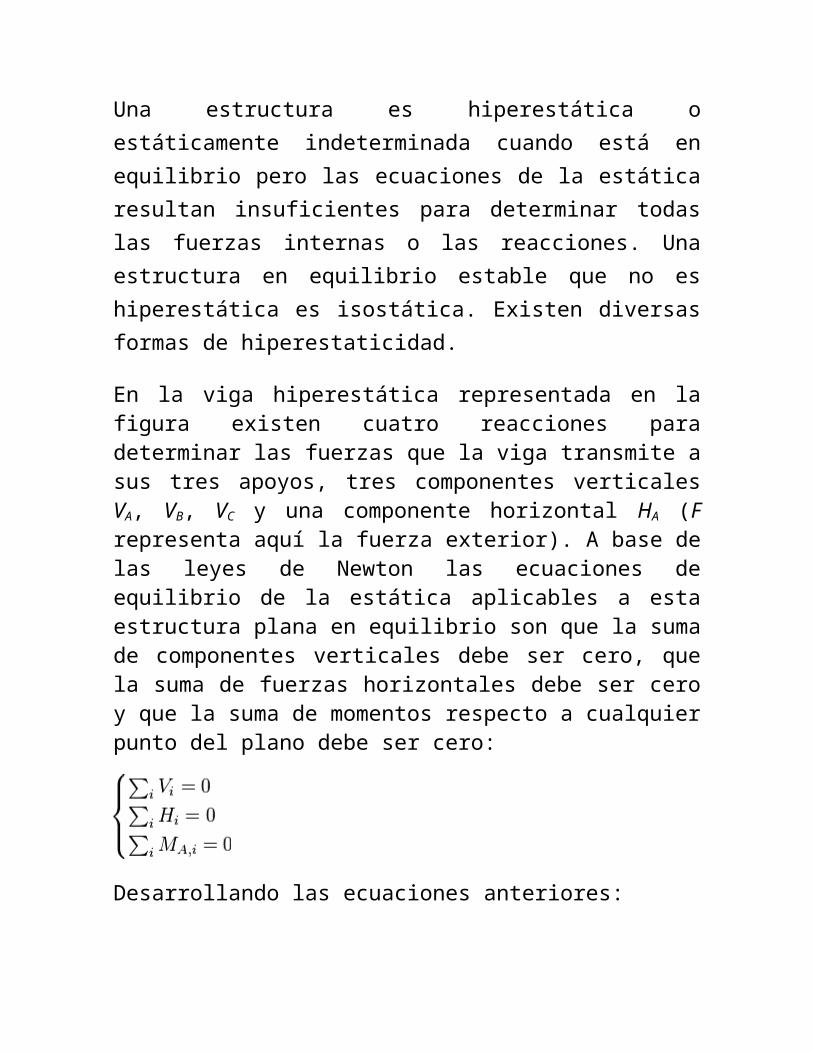
En la viga hiperestática representada en lafigura existen cuatro reacciones paradeterminar las fuerzas que la viga transmite asus tres apoyos, tres componentes verticalesVA, VB, VC y una componente horizontal HA (Frepresenta aquí la fuerza exterior). A base delas leyes de Newton las ecuaciones deequilibrio de la estática aplicables a estaestructura plana en equilibrio son que la sumade componentes verticales debe ser cero, quela suma de fuerzas horizontales debe ser ceroy que la suma de momentos respecto a cualquierpunto del plano debe ser cero:
Desarrollando las ecuaciones anteriores:
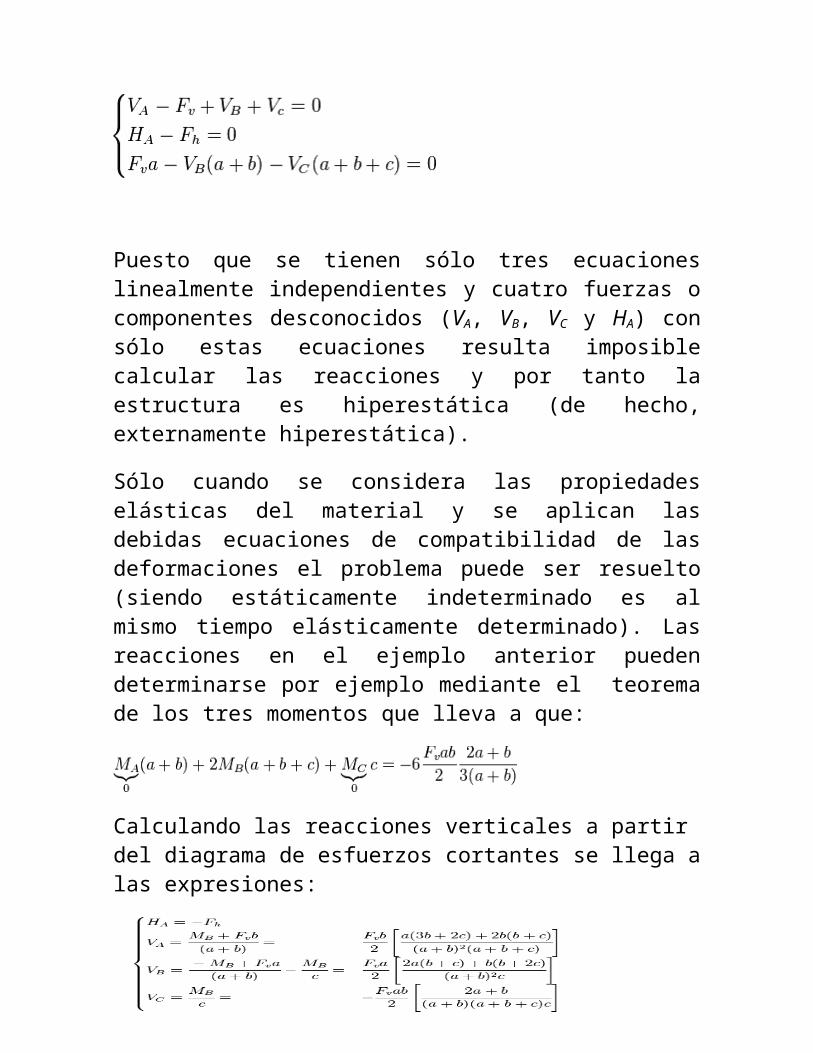
Puesto que se tienen sólo tres ecuacioneslinealmente independientes y cuatro fuerzas ocomponentes desconocidos (VA, VB, VC y HA) consólo estas ecuaciones resulta imposiblecalcular las reacciones y por tanto laestructura es hiperestática (de hecho,externamente hiperestática).
Sólo cuando se considera las propiedadeselásticas del material y se aplican lasdebidas ecuaciones de compatibilidad de lasdeformaciones el problema puede ser resuelto(siendo estáticamente indeterminado es almismo tiempo elásticamente determinado). Lasreacciones en el ejemplo anterior puedendeterminarse por ejemplo mediante el teoremade los tres momentos que lleva a que:
Calculando las reacciones verticales a partir del diagrama de esfuerzos cortantes se llega alas expresiones:
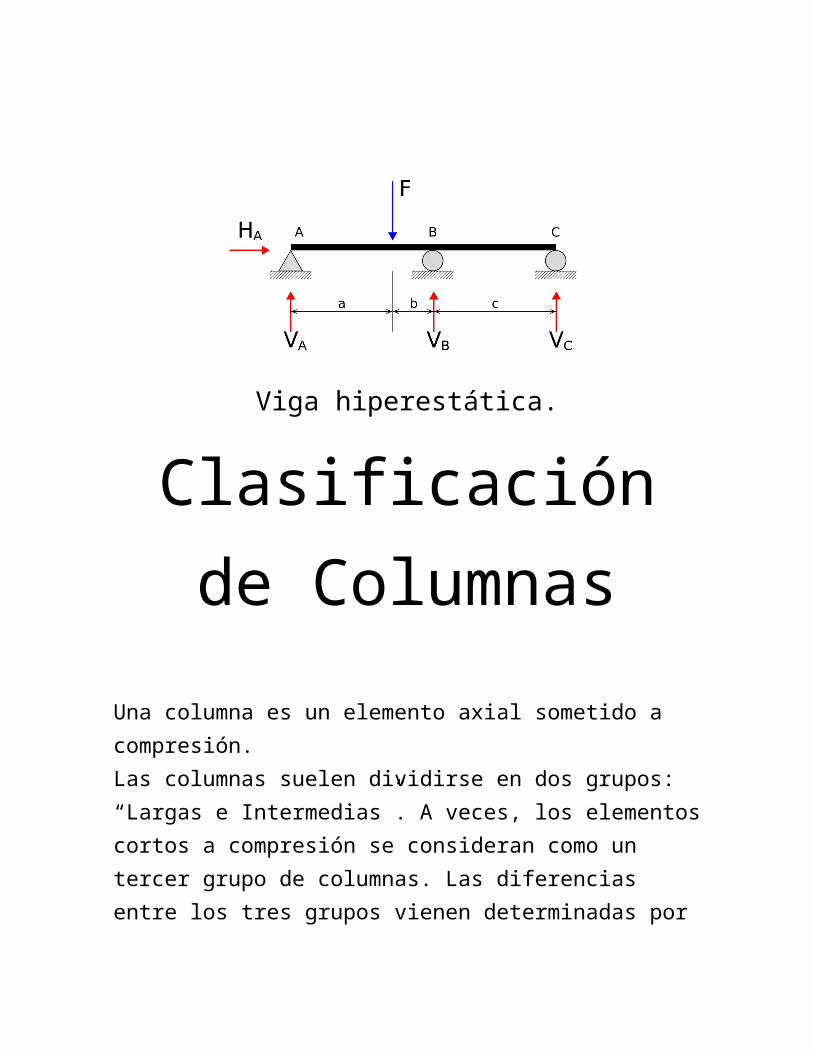
Viga hiperestática.
Clasificaciónde Columnas
Una columna es un elemento axial sometido a compresión.Las columnas suelen dividirse en dos grupos: “Largas e Intermedias”. A veces, los elementoscortos a compresión se consideran como un tercer grupo de columnas. Las diferencias entre los tres grupos vienen determinadas por
su comportamiento. Las columnas largas se rompen por pandeo o flexión lateral; las intermedias, por combinación de esfuerzas, aplastamiento y pandeo, y los postes cortos, por aplastamiento.
Una columna ideal es un elemento homogéneo, desección recta constante, inicialmente perpendicular al eje, y sometido a compresión.Sin embargo, las columnas suelen tener siemprepequeñas imperfecciones de material y de fabricación. La curvatura inicial de la columna, junto con la posición de la carga, dan lugar a una excentricidad indeterminada, con respecto al centro de gravedad, en una sección cualquiera. El estado de carga en estasección es similar al de un poste corto cargado excéntricamente, y el esfuerzo resultante está producido por la flexión.Si la excentricidad es pequeña u el elemento es corto, la flexión lateral es despreciable, y el esfuerzo de flexión es insignificante comparado con el esfuerzo de compresión directo. Sin embargo, en un elemento largo, que es mucho más flexible ya que las flexionesson proporcionales al cubo de la longitud.
Así, en las dos situaciones extremas, una columna corta soporta fundamentalmente el esfuerzo directo de compresión, y una columna larga está sometida principalmente al esfuerzode flexión. Cuando aumenta la longitud de una columna disminuye la importancia y efectos delesfuerzo directo de compresión y aumenta correlativamente las del esfuerzo de flexión.
Partes de una Columna:
ClasificaciónEn relación con otros componentes del edificioAtendiendo a su disposición en relación con otros componentes de un edificio, pueden distinguirse estos tipos de columnas:* Columna aislada o exenta: La que se encuentra separada de un muro o cualquier elemento vertical de la edificación. * Columna adosada: La que está yuxtapuesta a un muro u otro elemento de la edificación. * Columna embebida: La que aparenta estar parcialmente incrustada en el muro u otro cuerpo de
la construcción. Columna EmbebidaColumna AdosadaColumna Aislada o Exenta
Según los órdenes arquitectónicos clásicosEn razón de su pertenencia a alguno de los órdenes arquitectónicos clásicos, la columna puede ser:
Según el fusteTomando el todo por la parte, es habitual clasificar las columnas según el tipo de fusteque posean. Así, cabría relacionar las siguientes:* Columna lisa: Aquella que no tiene ni estrías ni adornos. * Columna estriada o acanalada: Aquella cuya forma posee estrías o acanaladuras ornamentales en toda su longitud. * Columna fasciculada: La que está conformada por una serie de delgados fustes, similares, agrupados a modo de haz. * Columna agrupada: La que posee varios fustescon una base y capitel comunes (típica del Gótico).
* Columna salomónica: La que tiene fuste tensionado en forma de espiral (típica del arte Barroco). * Columna románica: El fuste es cilíndrico y no tiene acanaladuras verticales como en la arquitectura clásica, sino que son lisos o en el caso más complejo lleva sogueados o decoración geométrica (zigzag) o vegetal.
Movimientos delvideo
proyectado enla Unidad 5.
Movimientorectilíneo
Es la trayectoria que describe el móvil de unalínea recta. Algunos tipos notables de movimiento rectilíneo son los siguientes:
Movimiento rectilíneo uniforme: cuando la velocidad es constante.
Movimiento rectilíneo uniformemente acelerado: cuando la aceleración es constante.
En mecánica el movimiento rectilíneo es uno delos ejemplos más sencillos de movimiento, en el que la velocidad tiene dirección constante (aunque pueda tener en algunos casos aceleración), además hay fuerza y aceleración,estas son siempre paralelas a la velocidad. Esto permite tratar el movimiento rectilíneo mediante ecuaciones escalares, sin necesidad, de usar el formalismo de vectores.
En el movimiento rectilíneo, la trayectoria que describe el móvil es una línea recta. Eso permite un tratamiento más simple del
problema, ya que al ser constante la direcciónpuede plantearse el problema del movimiento mediante funciones escalares de una sola variable. La ecuación básica del movimiento rectilíneo resulta ser:
Algunos tipos notables de movimiento rectilíneo son:
Movimiento rectilíneo uniforme: cuando la velocidad es constante .
Movimiento rectilíneo uniformemente acelerado: cuando la aceleración es constante .
Movimiento armónico unidimensional: oscilación sinusoidal alrededor de un punto de equilibrio .
Movimiento rectilíneo
Un sistema con movimiento rectilíneo se denomina autónomo si , es decir, si no existe dependencia explícita del tiempo. Para un sistema autónomo puede definirse una
función energía que es una constante del movimiento. Además la ecuación del movimiento puede obtenerse mediante simples cuadraturas.
Ecuaciones del movimiento
La trayectoria de una partícula es rectilínea cuando su aceleración es nula (sin serlo la velocidad) o cuando su aceleración no tiene componente normal a la velocidad. El movimiento rectilíneo es, pues, un caso particular del movimiento general en el espacio, pero debido a la abundancia de problemas y situaciones en que lo encontraremos, le dedicaremos una atención especial. Puesto que los vectores y están dirigidos a lo largo de la trayectoria, será conveniente escoger el origen O sobre ella de modo que el vector de posición también estarásituado sobre ella. Entonces, al ser paralelosentre sí todos los vectores que nos describen el movimiento de la partícula podemos prescindir de la notación vectorial.
Si tomamos el eje x en la dirección de la trayectoria y especificamos una cierta dirección como positiva, las ecuaciones de definición de la velocidad y de la aceleraciónse reducen a la componente x, o sea
de modo que, si conocemos podemos obtener la velocidad y la aceleración de la partícula, i.e., y , mediante dos derivaciones sucesivas. En algunos casos conoceremos y, entonces, por integración(y conociendo las condiciones iniciales y )podemos obtener y .
Podemos encontrar otra relación cinemática importante aplicando a la definición de la aceleración la regla de derivación de una función de función. Así, obtenemos la expresión
que nos resultará de gran utilidad cuando conozcamos o .
En la Tabla presentamos el modo de abordar diversos problemas de movimiento rectilíneo.
Movimiento rectilíneo uniformemente acelerado
Las expresiones anteriores aplicadas al movimiento rectilíneo uniformemente acelerado (a=cte) nos llevan a las bien conocidas relaciones

que se reducen a
para el movimiento rectilíneo uniforme (a=0, v=cte).
Expresiones para el movimiento rectilíneo uniforme
Conocemos Se aplicala derivada
Se obtiene laintegral Es decir
Movimientocurvilíneo
Es aquel movimiento que es parabólico, oscilatorio o circular. Cuando se conoce la trayectoria a lo largo de la cual viaja una partícula, es conveniente describir el movimiento por medio de los ejes de coordenadas n y t, los cuales actúan de maneranormal y tangente a la trayectoria, respectivamente, y en el instante considerado tienen su origen localizado en la partícula. Como la partícula se mueve, s es una función del tiempo. La dirección de la velocidad v de la partícula siempre es tangente a la trayectoria, y su magnitud se determina por la
derivada con respecto al tiempo de la función de la trayectoria s=s(t), es decir, v=ds/dt .
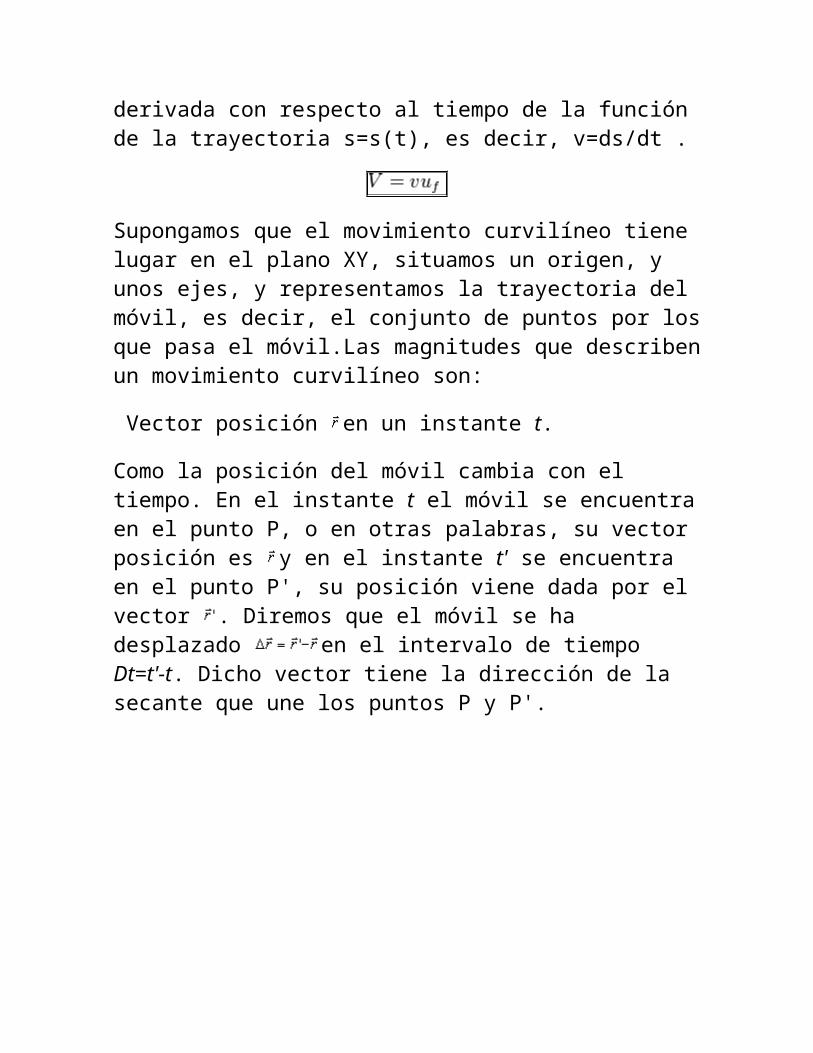
Supongamos que el movimiento curvilíneo tiene lugar en el plano XY, situamos un origen, y unos ejes, y representamos la trayectoria del móvil, es decir, el conjunto de puntos por losque pasa el móvil.Las magnitudes que describenun movimiento curvilíneo son:
Vector posición en un instante t.
Como la posición del móvil cambia con el tiempo. En el instante t el móvil se encuentraen el punto P, o en otras palabras, su vector posición es y en el instante t' se encuentra en el punto P', su posición viene dada por el vector . Diremos que el móvil se ha desplazado en el intervalo de tiempo Dt=t'-t. Dicho vector tiene la dirección de la secante que une los puntos P y P'.
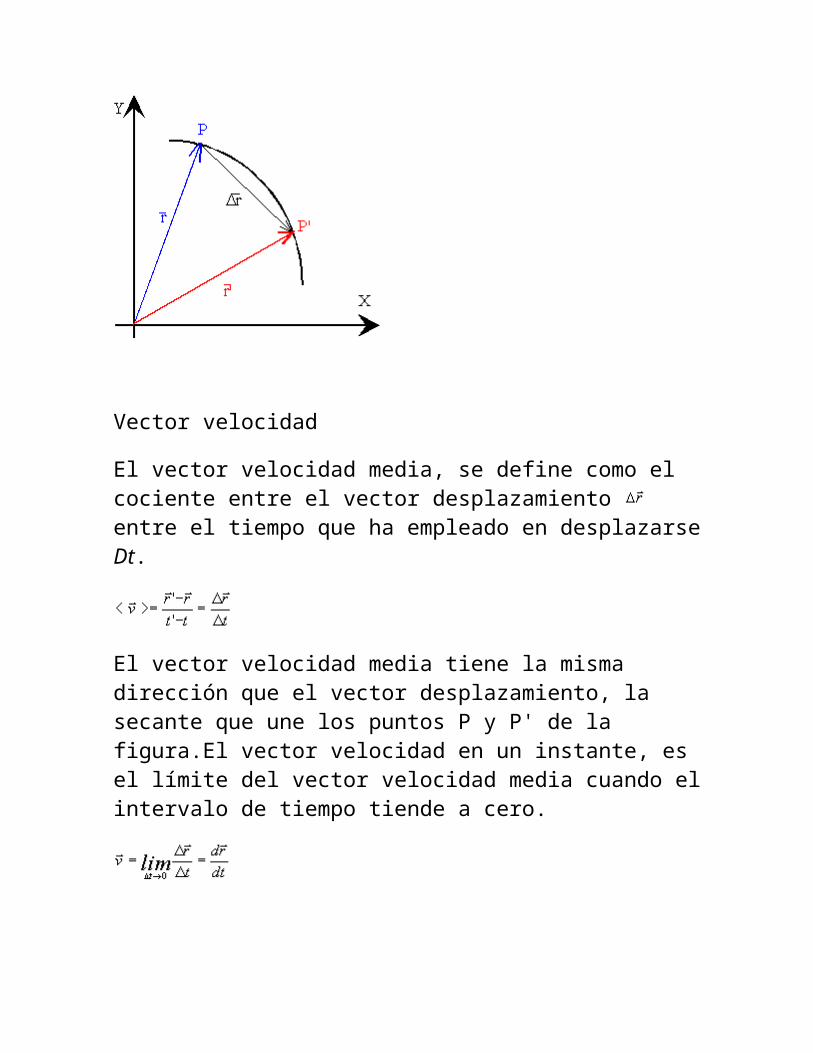
Vector velocidad
El vector velocidad media, se define como el cociente entre el vector desplazamiento entre el tiempo que ha empleado en desplazarseDt.
El vector velocidad media tiene la misma dirección que el vector desplazamiento, la secante que une los puntos P y P' de la figura.El vector velocidad en un instante, es el límite del vector velocidad media cuando elintervalo de tiempo tiende a cero.
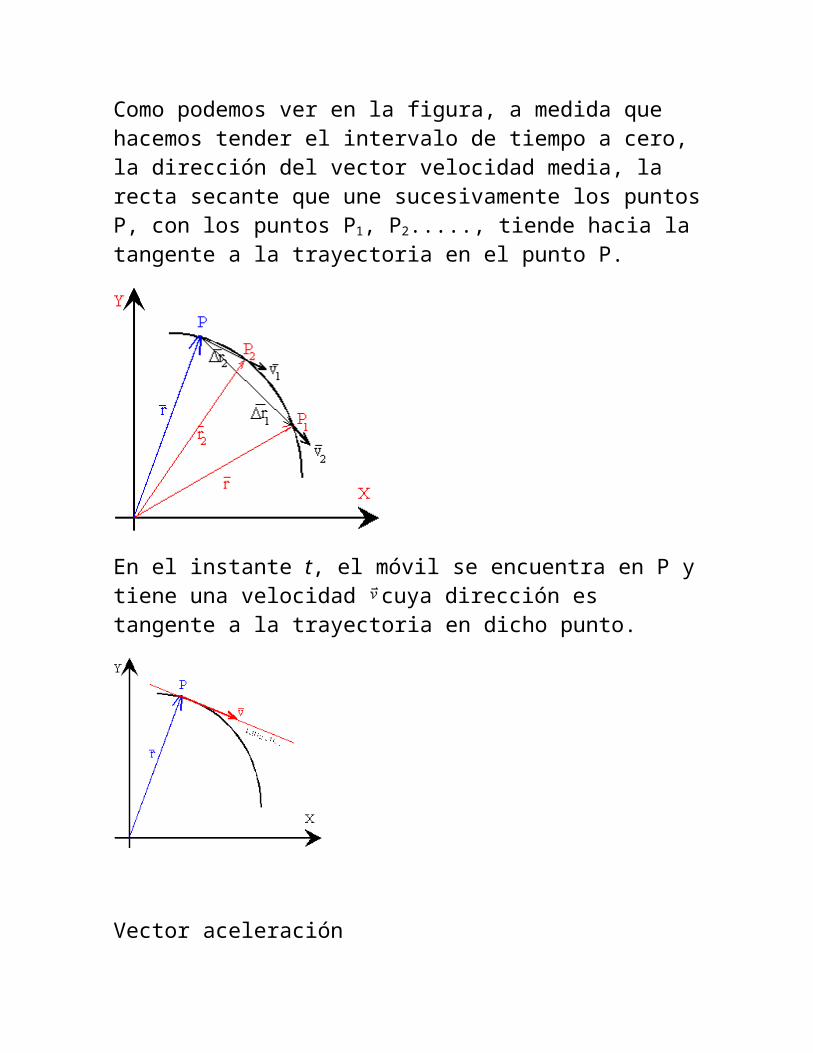
Como podemos ver en la figura, a medida que hacemos tender el intervalo de tiempo a cero, la dirección del vector velocidad media, la recta secante que une sucesivamente los puntosP, con los puntos P1, P2....., tiende hacia latangente a la trayectoria en el punto P.
En el instante t, el móvil se encuentra en P ytiene una velocidad cuya dirección es tangente a la trayectoria en dicho punto.
Vector aceleración
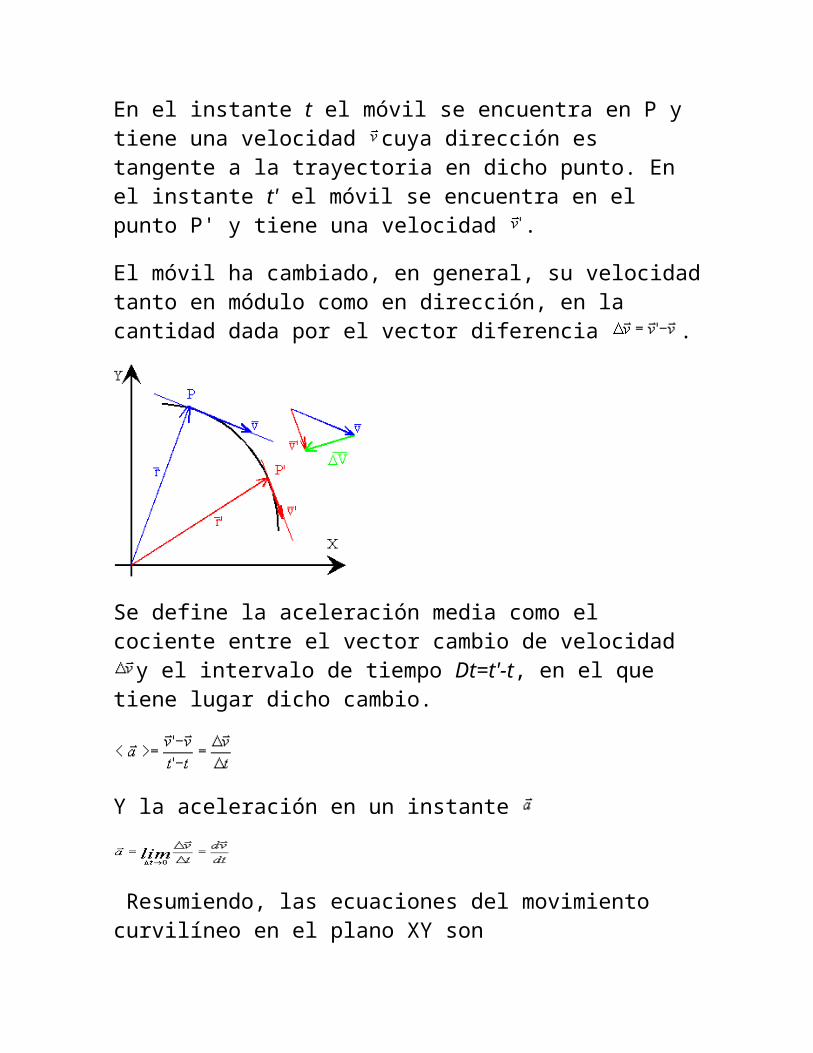
En el instante t el móvil se encuentra en P y tiene una velocidad cuya dirección es tangente a la trayectoria en dicho punto. En el instante t' el móvil se encuentra en el punto P' y tiene una velocidad .
El móvil ha cambiado, en general, su velocidadtanto en módulo como en dirección, en la cantidad dada por el vector diferencia .
Se define la aceleración media como el cociente entre el vector cambio de velocidady el intervalo de tiempo Dt=t'-t, en el que
tiene lugar dicho cambio.
Y la aceleración en un instante
Resumiendo, las ecuaciones del movimiento curvilíneo en el plano XY son
La primera fila corresponde a las ecuaciones de un movimiento rectilíneo a lo largo del ejeX, la segunda fila corresponde a las ecuaciones de un movimiento rectilíneo a lo largo del eje Y, y lo mismo podemos decir respecto del eje Z.
Por tanto, podemos considerar un movimiento curvilíneo como la composición de movimientos rectilíneos a lo largo de los ejes coordenados.
Plano Inclinadode GalileoGalilei
El plano inclinado es una máquina simple que consiste en una superficie plana que forma un ángulo agudo con el suelo y se utiliza para elevar cuerpos a cierta altura.
Tiene la ventaja de necesitarse una fuerza menor que la que se emplea si levantamos dichocuerpo verticalmente, aunque a costa de aumentar la distancia recorrida y vencer la fuerza de rozamiento. Las leyes que rigen el comportamiento de los cuerpos en un plano inclinado fueron enunciadas por primera vez por el matemático Simon Stevin, en la segunda mitad del siglo XVI. Para analizar las fuerzasexistentes sobre un cuerpo situado sobre un plano inclinado, hay que tener en cuenta la existencia de varios orígenes en las mismas.
En primer lugar se debe considerar la existencia de una fuerza de gravedad, también conocida como peso, que es consecuencia de la masa (M) que posee el cuerpo apoyado en el plano inclinado y tiene una magnitud de M.g con una dirección vertical y representada en la figura por la letra G.
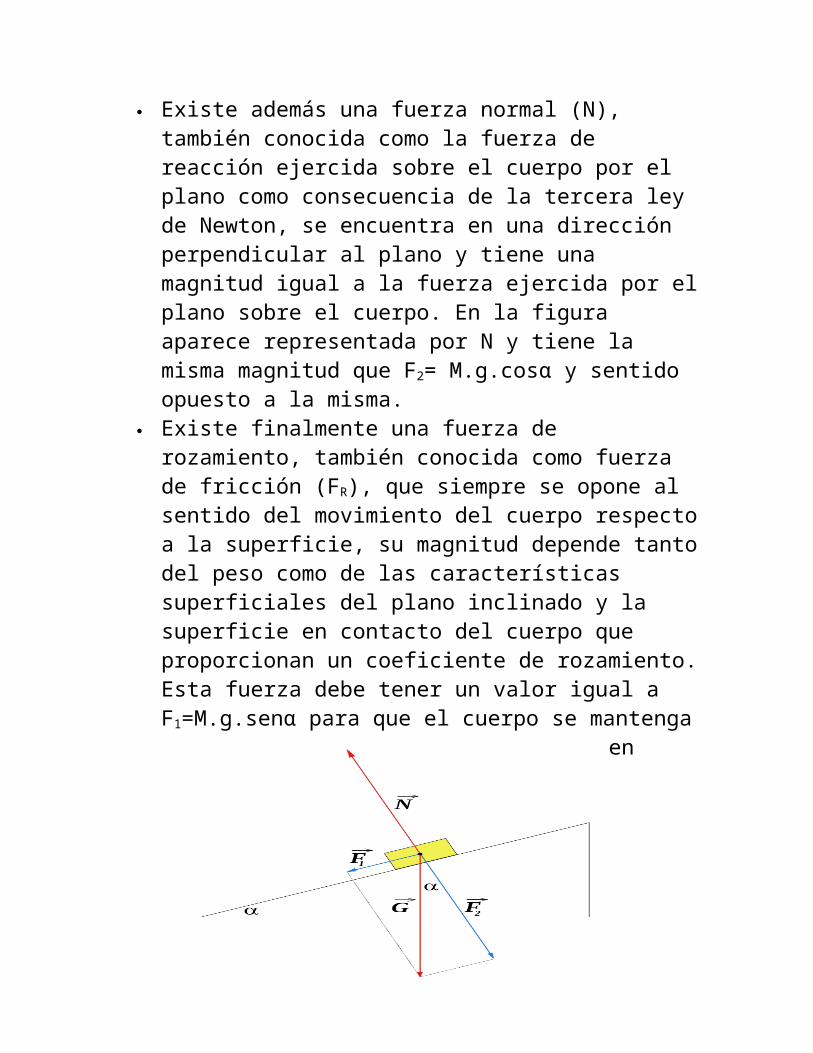
Existe además una fuerza normal (N), también conocida como la fuerza de reacción ejercida sobre el cuerpo por el plano como consecuencia de la tercera ley de Newton, se encuentra en una dirección perpendicular al plano y tiene una magnitud igual a la fuerza ejercida por elplano sobre el cuerpo. En la figura aparece representada por N y tiene la misma magnitud que F2= M.g.cosα y sentido opuesto a la misma.
Existe finalmente una fuerza de rozamiento, también conocida como fuerza de fricción (FR), que siempre se opone al sentido del movimiento del cuerpo respectoa la superficie, su magnitud depende tantodel peso como de las características superficiales del plano inclinado y la superficie en contacto del cuerpo que proporcionan un coeficiente de rozamiento.Esta fuerza debe tener un valor igual a F1=M.g.senα para que el cuerpo se mantenga
en
equilibrio. En el caso en que F1 fuese mayor que la fuerza de rozamiento el cuerpo se deslizaría hacia abajo por el plano inclinado. Por tanto para subir el cuerpo se debe realizar una fuerza con unamagnitud que iguale o supere la suma de F1
+ FR.
Plano inclinado y fuerzas que actúan sobre elsólido.
ConclusiónLos temas de la unidad 4 son
fundamentales así como sus fórmulas puesun claro ejemplo de aplicación de esas
leyes es en la construcción de
herramientas de uso diario en la vidadel ser humano, tal es el caso delpuente, gracias a estas leyes yconocimientos es posible sacarle
provecho y usarse de buena forma en lavida diaria. Cambiando de temas, en el
video de la 5ta Unidad se muestraciertos movimientos los cuales tambiénson temas importantes que se necesitanconocer, esto debido a que gracias a
ellos podemos saber cómo actúa un cuerposegún la velocidad y dirección o
desplazamiento que toma o como podríacomportarse como el caso de los
automóviles que se salían del carril enel video. Son temas demasiado
importantes que sin ellos no se podríanrealizar muchas cosas necesarias pues no
se sabría la reacción de ciertosmovimientos o fuerzas.




















