FISICA III
29
INDICE Contenido 1.-Factores de escala............................................ 2 2.-Breve introducción al sistema de coordenadas..................3 2.1.-Coordenadas Rectangulares..................................3 2.2.-Coordenadas cilíndricas....................................4 2.3.-Coordenadas esféricas......................................4 2.4.-tranformacion de coordenadas cartesianas a cilíndricas.....5 2.5.-tranformacion de coordenadas cartesianas a esféricas.......6 3.-Operadores diferenciales......................................8 3.1.-Operador nabla.............................................8 3.2.-Gradiente.................................................10 3.3.- Divergencia..............................................12 3.4.-Rotacional................................................14 3.5.-Laplaciano................................................16 3.6.-D'Alembertiano............................................17 3.7.-Wronskiano................................................17 3.8.-Jacobiano.................................................18 1
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of FISICA III
INDICE
Contenido1.-Factores de escala............................................22.-Breve introducción al sistema de coordenadas..................32.1.-Coordenadas Rectangulares..................................32.2.-Coordenadas cilíndricas....................................42.3.-Coordenadas esféricas......................................42.4.-tranformacion de coordenadas cartesianas a cilíndricas.....52.5.-tranformacion de coordenadas cartesianas a esféricas.......6
3.-Operadores diferenciales......................................83.1.-Operador nabla.............................................83.2.-Gradiente.................................................103.3.- Divergencia..............................................123.4.-Rotacional................................................143.5.-Laplaciano................................................163.6.-D'Alembertiano............................................173.7.-Wronskiano................................................173.8.-Jacobiano.................................................18
1
GENERALIDADES
OBJETIVO GENERAL
Conocer a importancia de los operadores diferenciales y poderdarle uso en los diferentes problemas que se sucita a lolargo de la carrera, para poder minimizar el trabajo y tenerun entendimiento claro de ello
OBJETIOS ESPECIFICOSEspecificar para que sirve cada uno de ellos, sus utilidadesy su forma de aplicar sin cometer errores al resolver losproblemas
2

MARCO TEORIO
1.-Factores de escalaLas líneas coordenadas de un sistema de coordenadas en el espacioeuclídeo tridimensional son aquellas que se obtienen partiendo deun punto dado, de coordenadas (q1, q2, q3), variando una de ellasy manteniendo fijas las otras dos. Un sistema de coordenadas sedice ortogonal si las líneas coordenadas son ortogonales en cadapunto. Las coordenadas cartesianas, las cilíndricas y lasesféricas, son ejemplos de coordenadas ortogonales.
Dado un conjunto de coordenadas sobre el espacio euclídeo cuyaslíneas coordenadas se cortan en ángulo recto, puede construirseuna base vectorial ortonormal en cada punto, a partir de losvectores tangentes a cada línea coordenada. En la obtención deestos vectores se definen unas cantidades, denominadas factores deescala, que aparecen frecuentemente en las fórmulas del cálculovectorial. Tomando los vectores tangentes a cada línea en unpunto, obtenemos tres vectores ortogonales entre sí, pero nonecesariamente unitarios:
3

Para obtener un sistema ortonormal, dividimos cada vector por sumódulo
Las cantidades hi, son los denominados factores de escala. Sunombre proviene de que dan la proporción entre lo que varíauna coordenada y el desplazamiento que produce estavariación. De hecho el tensor métrico delespacio euclídeo expresado en estesistema de coordenadas:
Debe recordarse que el espacio euclídeo, en el que existe unafunción para medir distancias y longitudes de curvas, tiene laestructura de variedad de Riemann gracias a la existencia de dichotensor métrico. Gracias a esa relación entre los factores deescala y el tensor métrico, estas magnitudes aparecen en multitudde expresiones de cálculo vectorial. Así, un "desplazamientoinfinitesimal" se escribe:
Aplicando el cálculo de los factores de escala a las coordenadascartesianas se obtiene:
En coordenadas cilíndricas:
y en coordenadas esféricas:
2.-Breve introducción al sistema de coordenadasSe conoce como sistema de coordenadas al conjunto de los valoresque permiten identificar de manera inequívoca la posición de unpunto en un espacio euclídeo (un tipo de espacio geométrico). Los
4

sistemas de coordenadas más simples se definen sobre espaciosplanos.
2.1.-Coordenadas RectangularesEn el sistema de coordenadas rectangulares, también denominadascoordenadas cartesianas en honor a su inventor, el matemáticofrancés Rene Descartes, la posición de un punto se encuentradeterminada por tres números independientes que definen lasdistancias a los llamados planos coordenados.
En la Figura1, se pueden observar los tresplanos coordenados que forman ángulosrectos entre si y cuyas intersecciones sonlos llamados ejes coordenados.
Las distancias perpendiculares medidas alos planos coordenados constituyen lascoordenadas de la posición del punto dado.
2.2.-Coordenadas cilíndricasEl sistema de coordenadas cilíndricasutiliza como base el sistema de coordenadaspolares en 2D proyectado hacia el espaciousando la coordenada z del sistema decoordenadas cartesianas.
En este sistema, las coordenadas x e y sonreemplazadas por un vector dirigido a laproyección del punto sobre el plano XY cuyamagnitud es igual a la distancia del puntoal eje z , la cual es la primera coordenadadel sistema. El ángulo de dirección dedicho vector medido con respecto al semiejex positivo constituye la segunda coordenada del sistema y latercera coordenada coincide con la coordenada z del sistemacartesiano.
En la Figura 2 pueden observarse las tres coordenadas asociadas a unpunto en el sistema cilíndrico de coordenadas.
5
Figura(1)
Figura 2

2.3.-Coordenadas esféricas
En el sistema de coordenadasesféricas se utilizan también trescoordenadas para notar la posiciónde un punto o un vector en unespacio tridimensional, dos de estascoordenadas son angulares y una deellas es métrica.
Se utiliza la longitud de un vector(R) que une el origen de coordenadascon punto dado, el ángulo que estevector forma con el semieje zpositivo y el ángulo que suproyección sobre el plano XY forma con el semieje X positivo , talcomo se muestra en la Figura 8 .
Los ángulos y toman los nombres de án gulo polar y ánguloazimutal respectivamente.
2.4.-tranformacion de coordenadas cartesianas a cilíndricas
2.4.1.-Base coordenadaA partir del sistema decoordenadas cilíndricas sepuede definir una base vectorialen cada punto del espacio, mediante los vectores tangentes a las
6
Figura 3

líneas coordenadas. Esta nueva base puede relacionarse con la basefundamental de las coordenadas cartesianas mediante las relaciones
2.4.2.-Diferenciales de línea, superficie y volumenUn desplazamiento infinitesimal, expresado en coordenadas cilíndricas,viene dado por
Diferenciales de superficie: La expresión general de un diferencial desuperficie en coordenadas curvilíneas es complicada.
Sin embargo, para el caso de que se trate de una superficiecoordenada, el resultado es
y expresiones análogas para las otras dos superficies coordenadas.
En el caso particular de las coordenadas cilíndricas, losdiferenciales de superficie son
Diferencial de volumen El volumen de un elemento en coordenadascurvilíneas equivale al producto del jacobiano de latransformación, multiplicado por los tres diferenciales. Eljacobiano, a su vez, es igual al producto de los tres factores deescala, por lo que
7

que para coordenadas cilíndricas da
2.5.-tranformacion de coordenadas cartesianas a esféricas
Convenciones utilizadasLa mayoría de los físicos,ingenieros y matemáticos nonorteamericanos escriben:
φ la colatitud, de 0° a 360°
θ el azimutal, de 0° a 180°
Estas relaciones se hacen singulares cuando tratan de extenderseal propio eje z, donde , en el cual φ, no estádefinida. Además, φ no es continua en ningún punto talque x = 0:
La función inversa entre los dos mismos abiertos puedeescribirse en términos de las relaciones inversas:
Relación con las coordenadas cilíndricas
8

Como sistema intermedio entre las coordenadas cartesianas y lasesféricas, está el de las coordenadas cilíndricas, que serelaciona con el de las esféricas por las relaciones
y sus inversas
Base coordenada
A partir del sistema de coordenadas esféricas puede definirse unabase vectorial en cada punto del espacio, mediante los vectorestangentes a las líneas coordenadas. Esta nueva base puederelacionarse con la base fundamental de las coordenadascartesianas mediante las relaciones
e inversamente
En el cálculo de esta base se obtienen los factores de escala
Disponiendo de la base de coordenadas esféricas se obtiene que laexpresión del vector de posición en estas coordenadas es
Nótese que no aparece términos en o . La dependencia en estascoordenadas está oculta en el vector .
9

Diferenciales de línea, superficie y volumen
Diferencial de línea
Un desplazamiento infinitesimal, expresado en coordenadasesféricas, viene dado por
Diferenciales de superficie
La expresión general de un diferencial de superficie encoordenadas curvilíneas es complicada. Sin embargo, para el casode que se trate de una superficie coordenada, elresultado es
y expresiones análogas para las otras dos superficies coordenadas.
En el caso particular de las coordenadas esféricas, losdiferenciales de superficie son
Diferencial de volumen
El volumen de un elemento en coordenadas curvilíneas equivale alproducto del jacobiano de la transformación, multiplicado por lostres diferenciales. El jacobiano, a su vez, es igual al productode los tres factores de escala, por lo que
que para coordenadas esféricas da
10

3.-Operadores diferenciales3.1.-Operador nablaEn geometría diferencial, nabla (también llamado del) es un operador diferencial vectorial representado por el símbolo: (nabla).
En coordenadas cartesianas tridimensionales, nabla se puede escribir como:
Puede darse una definición del operador nabla que no depende del sistema de coordenadas que se emplee. Esta definición es una generalización de la que se emplea para definir la divergencia:
En la expresión anterior * representa un producto arbitrario (escalar, vectorial, tensorial o por un escalar) y A es un campo escalar, vectorial o tensorial. es un volumen diferencial que en el límite se reduce a un punto. De esta forma pueden definirse de forma intrínseca el gradiente, la divergencia, el rotacional y otros operadores sin nombre propio.
Simbología
El nombre del símbolo ∇ proviene de la palabra griega equivalente a la palabra hebrea arpa, instrumento que tiene una forma similar.Hay palabras relacionadas en los lenguajes arameo y hebreo. El símbolo fue usado por primera vez por William Rowan Hamilton, perode forma lateral: ⊲. Otro nombre menos conocido del símbolo es atled (delta deletreado al revés), porque nabla es una letra griega delta (Δ) invertida: en el griego actual se la llama ανάδελτα (anádelta), que significa "delta invertida".
Aplicaciones del operador nabla
• Gradient
e:
• Divergen
cia:
11

• Rotacion
al:
• Laplacia
no:
ALGEBRA DEL OPERADOR NABLA
12

3.2.-GradienteEl vector gradiente lo que indica hacia donde una función crecemas rápidamente, y el vector opuesto hacia donde decrece
Se toma como campo escalar el que se asigna a cada punto delespacio una presión P (campo escalar de 3 variables), entonces elvector gradiente en un punto genérico del espacio indicará ladirección en la cual la presión cambiará más rápidamente. Otroejemplo es el de considerar el mapa de líneas de nivel de unamontaña como campo escalar, que asigna a cada pareja decoordenadas latitud/longitud un escalar altitud (campo escalar de2 variables). En este caso el vector gradiente en un puntogenérico indicará la dirección de máxima inclinación de lamontaña. Nótese que el vector gradiente será perpendicular a laslíneas de contorno (líneas "equiescalares") del mapa. El gradientese define como el campo vectorial cuyas funciones coordenadas sonlas derivadas parciales del campo escalar, esto es:
Esta definición se basa en que el gradiente permite calcularfácilmente las derivadas direccionales. Definiendo en primer lugarla derivada direccional según un vector:
13
Una forma equivalente de definir el gradiente es como el únicovector que, multiplicado por el vector unitario, da la derivadadireccional del campo escalar:
Con la definición anterior, el gradiente está caracterizado deforma unívoca. El gradiente se expresa alternativamente medianteel uso del operador nabla
PROPIEDADES
El gradiente verifica que:
Es ortogonal a las superficies equiescalares, definidas por=cte.
Apunta en la dirección en que la derivada direccional es máxima.
Su norma es igual a esta derivada direccional máxima. Se anula en los puntos estacionarios (máximos, mínimos y
puntos de silla). El campo formado por el gradiente en cada punto es siempre
irrotacional, esto es,
A partir de su definición puede hallarse su expresión en diferentes sistemas de coordenadas. En coordenadas cartesianas, suexpresión es simplemente
En un sistema de coordenadas ortogonales, el gradiente requiere los factores de escala, mediante la expresión
14

Para coordenadas cilíndricas resulta
y para coordenadas esféricas ,
APLICACIONES en la física
La interpretación física del gradiente es la siguiente: mide larapidez de variación de una magnitud física al desplazarse unacierta distancia. Un gradiente alto significa que de un punto aotro cercano la magnitud puede presentar variaciones importantes(aquí se entiende por gradiente alto o grande uno tal que sumódulo es grande). Un gradiente de una magnitud pequeño o nuloimplica que dicha magnitud apenas varía de un punto a otro.
El gradiente de una magnitud física posee innumerablesaplicaciones en física, especialmente en electromagnetismo ymecánica de fluidos. En particular, existen muchos camposvectoriales que puede escribirse como el gradiente de un potencialescalar.
Uno de ellos es el campo electrostático, que deriva del potencial eléctrico:
Todo campo que pueda escribirse como el gradiente de un campoescalar, se denomina potencial, conservativo o irrotacional. Así, una fuerza conservativa deriva de la energía potencial como:
Los gradientes también aparecen en los procesos de difusión que verifican la ley de Fick o la ley de Fourier para la temperatura. Así, por ejemplo, el flujo de calor en un material es directamente proporcional al gradiente de temperaturas
siendo k la conductividad térmica.
15

3.3.- DivergenciaLa divergencia de un campo vectorial mide la diferencia entre elflujo saliente y el flujo entrante de un campo vectorial sobre lasuperficie que rodea a un volumen de control, por tanto, si elcampo tiene "fuentes" la divergencia será positiva, y si tiene"sumideros", la divergencia será negativa.
La divergencia de un campo vectorial en un punto es un campoescalar, y se define como el flujo del campo vectorial por unidadde volumen conforme el volumen alrededor del punto tiende a cero:
Donde S es una superficie cerrada que se reduce a un punto en ellímite. El símbolo representa el operador nabla.
Esta definición está directamente relacionada con el concepto deflujo del campo. Como en el caso del flujo, si la divergencia enun punto es positiva, se dice que el campo posee fuentes. Si ladivergencia es negativa, se dice que tiene sumideros. El ejemplomás característico lo dan las cargas eléctricas, que dan ladivergencia del campo eléctrico, siendo las cargas positivasmanantiales y las negativas sumideros del campo eléctrico.
Se llaman fuentes escalares del campo al campo escalar que seobtiene a partir de la divergencia de
La divergencia de un campo vectorial se relaciona con el flujo através del teorema de Gauss o teorema de la divergencia
Coordenadas cartesianas
Cuando la definición de divergencia se aplica al caso de un campoexpresado en coordenadas cartesianas,
El resultado es sencillo:
Para coordenadas cilíndricas resulta:
16
Para coordenadas esféricas resulta:
APLICACIÓN
Teorema de la divergencia
El teorema de la divergencia, frecuentemente llamado teorema deGauss, relaciona el flujo de un campo vectorial a través de unasuperficie cerrada con la integral de la divergencia de dichocampo en el interior del volumen encerrado por una superficie. Eseresultado lo hace interesante tanto en aplicaciones relacionadascon la electrostática como en la mecánica de fluidos.
El teorema se enuncia así: Sea una función vectorial diferenciable definida sobre un conjunto y sea unconjunto cerrado limitado por una frontera o superficie decontorno (que sea una variedad diferenciable) y sea el vectornormal en cada punto de la superficie, entonces se cumple que:
3.4.-RotacionalEn el cálculo vectorial, el rotacional o rotor es un operadorvectorial que muestra la tendencia de un campo vectorial a inducirrotación alrededor de un punto.
Matemáticamente, esta idea se expresa como el límite de lacirculación del campo vectorial, cuando la curva sobre la que seintegra se reduce a un punto:
Aquí, es el área de la superficie apoyada en la curva C, quese reduce a un punto. El resultado de este límite no es elrotacional completo (que es un vector), sino solo su componentesegún la dirección normal a y orientada según la regla de lamano derecha. Para obtener el rotacional completo deberán
17
calcularse tres límites, considerando tres curvas situadas enplanos perpendiculares.
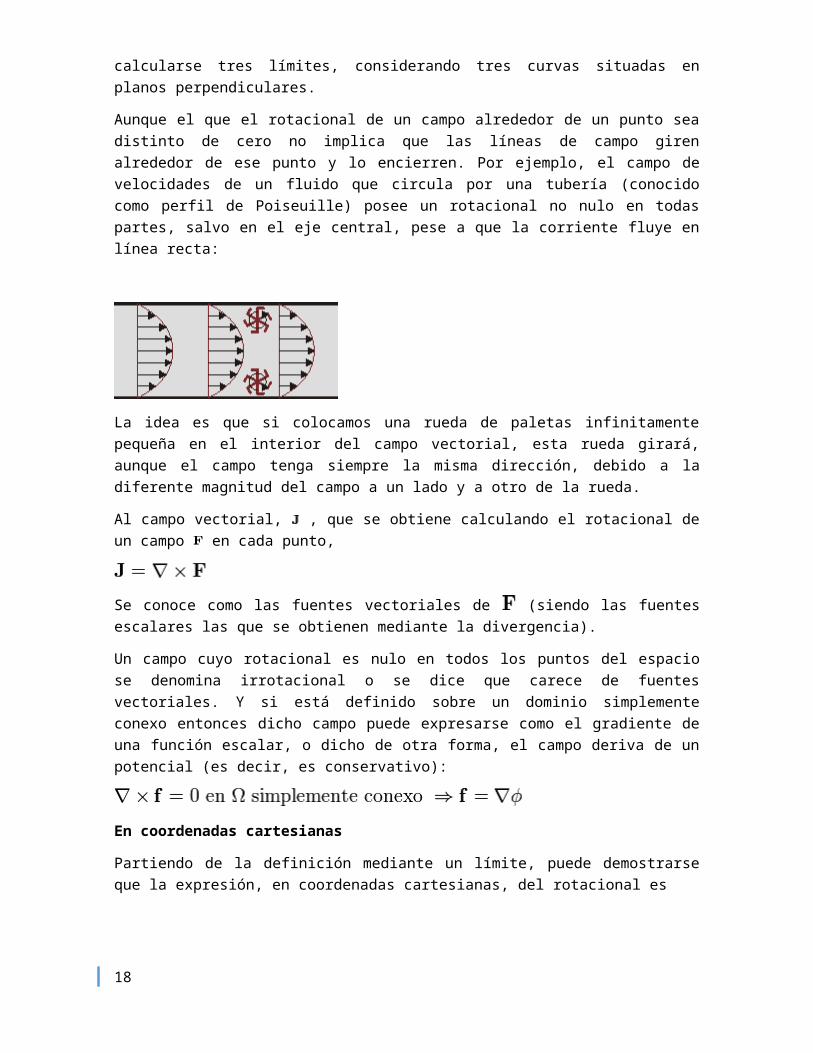
Aunque el que el rotacional de un campo alrededor de un punto seadistinto de cero no implica que las líneas de campo girenalrededor de ese punto y lo encierren. Por ejemplo, el campo develocidades de un fluido que circula por una tubería (conocidocomo perfil de Poiseuille) posee un rotacional no nulo en todaspartes, salvo en el eje central, pese a que la corriente fluye enlínea recta:
La idea es que si colocamos una rueda de paletas infinitamentepequeña en el interior del campo vectorial, esta rueda girará,aunque el campo tenga siempre la misma dirección, debido a ladiferente magnitud del campo a un lado y a otro de la rueda.
Al campo vectorial, , que se obtiene calculando el rotacional deun campo en cada punto,
Se conoce como las fuentes vectoriales de (siendo las fuentesescalares las que se obtienen mediante la divergencia).
Un campo cuyo rotacional es nulo en todos los puntos del espaciose denomina irrotacional o se dice que carece de fuentesvectoriales. Y si está definido sobre un dominio simplementeconexo entonces dicho campo puede expresarse como el gradiente deuna función escalar, o dicho de otra forma, el campo deriva de unpotencial (es decir, es conservativo):
En coordenadas cartesianas
Partiendo de la definición mediante un límite, puede demostrarseque la expresión, en coordenadas cartesianas, del rotacional es
18

Que se puede expresar de forma más concisa con ayuda del operadornabla como un producto vectorial, calculable mediante undeterminante:
Debe tenerse muy presente que dicho determinante en realidad no estal pues los elementos de la segunda fila no tienen argumento ypor tanto carecen de sentido. Además dicho determinante sólo puededesarrollarse por la primera fila. En definitiva, la notación enforma de determinante sirve para recordar fácilmente la expresióndel rotacional.
En la notación de Einstein, con el símbolo de Levi-Civita seescribe como:
Otros sistemas de coordenadas
(donde, en cartesianas, y reobtenemos laexpresión anterior. En coordenadas cilíndricas y en coordenadas esféricas .
Propiedades
Todo campo potencial (expresable como el gradiente de un potencialescalar) es irrotacional y viceversa, esto es,
19
Todo campo central (radial y dependiente sólo de la distancia alcentro) es irrotacional.
El rotacional de un campo vectorial es siempre un camposolenoidal, esto es, su divergencia siempre es nula:
3.5.-LaplacianoEn cálculo vectorial, el operador laplaciano o laplaciano es unoperador diferencial elíptico de segundo orden, denotado como Δ,relacionado con ciertos problemas de minimización de ciertasmagnitudes sobre un cierto dominio. El operador tiene ese nombreen reconocimiento a Pierre-Simon Laplace que estudió soluciones deecuaciones diferenciales en derivadas parciales en las queaparecía dicho operador.
Expresado en coordenadas cartesianas es igual a la suma de todaslas segundas derivadas parciales no mixtas dependientes de unavariable. Corresponde a div (grad φ), de donde el uso del símbolodelta (Δ) o nabla cuadrado para representarlo. Si son un campoescalar y un campo vectorial respectivamente, el laplaciano deambos puede escribirse en términos del operador nabla como:
En física, el laplaciano aparece en múltiples contextos como lateoría del potencial, la propagación de ondas, la conducción delcalor, la distribución de tensiones en un sólido deformable, etc.Pero de todas estas situaciones ocupa un lugar destacado en laelectrostática y en la mecánica cuántica. En la electrostática, eloperador laplaciano aparece en la ecuación de Laplace y en laecuación de Poisson. Mientras que en la mecánica cuántica ellaplaciano de la función de onda de una partícula da la energíacinética de la misma. En matemáticas, las funciones tales que sulaplaciano se anula en un determinado dominio, se llaman funcionesarmónicas sobre el dominio. Estas funciones tienen una excepcionalimportancia en la teoría de funciones de variable compleja. Ademásel operador laplaciano es el ingrediente básico de la teoría deHodge y los resultados de la cohomología de De Rham.
Coordenadas cartesianas
20

En coordenadas cartesianas (plano) bidimensionales, el laplacianode una función f es:
Coordenadas cilíndricas
Coordenadas esféricas
En coordenadas ortogonales generales
3.6.-D'AlembertianoEl operador D'Alembertiano es la generalización del operadorlaplaciano a un espacio de Minkowski, o, más en general, a unespacio de dimensión y métrica arbitraria. Se suele representarcomo , o simplemente como . Técnicamente el D'Alembertiano deuna función escalar es el operador de Laplace-Beltrami asociado ala métrica de dicho espacio, operando sobre dicha función.
Su definición es, por analogía con el operador nabla ordinario de, el producto escalar del vector de derivadas parciales consigo
mismo. En una variedad (pseudo)riemanniana el operador nabla sedefine como:
Esta forma manifiestamente covariante implica la invarianza deeste operador frente a transformaciones de Lorentz; y representala ecuación de onda electromagnética.
Escrito en la notación de derivadas parciales, d'Alembert enun espacio-tiempo plano está definido por
21
Donde c es la velocidad de la luz.
El operador suele llamar el d'Alembert es también el Laplaciano enun colector plano de la firma de Lorentz.
Aplicaciones
La ecuación de Klein-Gordon (Ecuación de Klein-Gordon).
La ecuación de onda (ecuación de onda) para el campoelectromagnético en el vacío.
La ecuación de onda (ecuación de onda) para pequeñas vibraciones.
3.7.-WronskianoEn matemática, el wronskiano es un determinante introducido en18121 por el matemático polaco Józef Hoene-Wroński (1776-1853) ynombrado en 18822 por el matemático escocés Thomas Muir (1844 –1934). Se utiliza en el estudio de las ecuaciones diferencialesordinarias, donde a veces puede ser utilizado para mostrar que unconjunto de soluciones es linealmente independiente.
Dado un conjunto de n funciones que son (n-1)-veces derivables,f1, ..., fn, el wronskiano W(f1, ..., fn) está dado por:
El wronskiano es el determinante de la matriz construida alcolocar las funciones en el primer renglón (o fila), la primeraderivada de cada función en el segundo renglón, y así hasta laderivada n-1, formando así una matriz cuadrada, algunas vecesllamada matriz fundamental.
En una ecuación diferencial lineal de segundo orden, el wronskianopuede ser calculado por computadora más fácilmente por laidentidad de Abel.
22

El wronskiano puede usarse para determinar si un conjunto defunciones es linealmente independiente en un intervalo dado:
si el wronskiano es distinto de cero en algún punto de unintervalo, entonces las funciones asociadas son linealmenteindependientes en el intervalo.
Esto es útil en muchas situaciones. Por ejemplo, si queremosverificar si dos soluciones de una ecuación diferencial de segundoorden son independientes, quizás podamos usar el wronskiano.Notése que si el wronskiano es cero uniformemente sobre elintervalo, las funciones pueden ser o no ser linealmenteindependientes.
si un conjunto de funciones es linealmente dependiente en unintervalo, esto implica obligatoriamente que el wronskianocorrespondiente es uniformemente cero en el intervalo, pero losegundo no implica lo primero.
Una malinterpretación común (desafortunadamente promulgada enmuchos textos) es que si W = 0 en cualquier lugar, implica unadependencia lineal - lo que es incorrecto. Sin embargo si f_1,...,f_n son funciones analíticas y W = 0 en todas partes, entoncesf_1,..., f_n son linealmente dependientes.
Hay un sentido en el que el wronskiano de una ecuación diferenciallineal de orden n-ésimo es el producto exterior n-ésimo. Paraimplementar esa idea se debe trabajar con algunas formulaciones enlas que las ecuaciones diferenciales son suficientemente parecidasa vectores en el espacio: por ejemplo en el lenguaje del fibradovectorial llevando una conexión.
El teorema es significativamente fácil de probar por medio de susegunda declaración mencionada anteriormente, siendo: Si lasfunciones son linealmente dependientes sobre el intervalo,entonces lo son también las columnas de la matriz wronskianaasociada (la diferenciación es una operación lineal);consecuentemente, el determinante wronskiano es cero en todos lospuntos del intervalo.
3.8.-JacobianoEn cálculo vectorial, se llama jacobiano o determinante jacobianoal determinante de la matriz jacobiana. Tanto la matriz jacobianacomo el determinante jacobiano reciben su nombre en honor almatemático Carl Gustav Jacobi.
23

En geometría algebraica, el jacobiano de una curva hace referenciaa la variedad jacobiana, un grupo y variedad algebraica asociada ala curva, donde la curva puede ser embebida.
Coordenadas cilíndricas
Vimos que en la geometría plana presentamos el sistema decoordenadas polares con el objeto de dar una descripción másconveniente a ciertas curvas y regiones. En tres dimensionesexisten dos sistemas de coordenadas que son semejantes a lascoordenadas polares y proporcionan descripciones más apropiadas dealgunas superficies y sólidos que suelen presentarse.
Uno es el sistema de coordenadas esféricas (que loveremos más adelante), y el otro es el sistema de coordenadascilíndricas, en donde un punto P del espacio tridimensional serepresenta mediante una tríada ordenada (r, t, z) donde r y t sonlas coordenadas polares de la proyección de P sobre el plano x y,y z es la distancia dirigida desde el plano x y a P como semuestra en la figura.
Entonces podemos afirmar que x = r cos t, y = r sen t, y z = z.
upongamos ahora una integral triple de una función F(x, y, z) definida en un dominio Dx y z, podemos sustituir las variables x, y, z por funciones H (u, v, w), M (u, v, w), y N (u, v, w) respectivamante, entonces la integral triple nos queda igual a
siendo J el Jacobiano que resulta
24

Si calculamos el Jacobiano con las ecuaciones anteriores obtenemos
Entonces el cambio de variables en coordenadas cilíndricas será
Coordenadas esféricas
Las coordenadas esféricas (r, j, t) se muestran en la figura, donde r es la distancia desde el origen de coordenadas hasta el punto P, j es el ángulo entre el eje positivo z y el segmento de recta OP, y t es el mismo ángulo que en las coordenadas cilíndricas.
La relación entre las coordenadas esféricas y las rectangulares pueden observarse en la misma figura. De los triángulos OPZ y OPP’obtenemos
De acuerdo con estas ecuaciones vamos a calcular el Jacobiano para realizar el cambio de variables.
25

Entonces el cambio de coordenadas rectangulares a esféricas en integrales triples resultará.
26

CONCLUSIONES
Todos los operadores tienen vital importancia en el ámbito de lafísica y el, sus aplicaciones son tan importantes para poderhallar soluciones sin mucho procedimiento, minimizan el trabajoasí como la deducción de fórmulas tanto en electrostática,electrodinámica o en magnetismo.
Cada uno de estos operadores tienen su propia formula de uso porlo que el concepto de cada uno de ellos no varía, es aplicablepara el resto de la carrera en general.
27

BIBLIOGRAFIA
http://portales.puj.edu.co/objetosdeaprendizaje/Online/OA04/Sistemas%20de%20coordenadas.htm
http://es.wikipedia.org/wiki/Anexo:Tabla_en_coordenadas_cil%C3%ADndricas_y_esf%C3%A9ricas
http://es.wikipedia.org/wiki/Coordenadas_esf%C3%A9ricasv
http://es.wikipedia.org/wiki/Factores_de_escala_(coordenadas_ortogonales)
http://es.wikipedia.org/wiki/Coordenadas_cil%C3%ADndricas
http://portales.puj.edu.co/objetosdeaprendizaje/Online/OA04/Sistemas%20de%20coordenadas.htm
http://ocw.upm.es/ingenieria-agroforestal/mecanica-y-mecanismos/Contenidos/Teoria/Anejo2.Operadores-diferenciales.pdf
http://es.knowledger.de/2189081/OperadorDeDAlembert
28
http://tex.stackexchange.com/questions/20510/what-is-the-best-symbol-to-use-for-the-dalembertian
http://finslab.com/enciclopedia/letra-d/dalembert-operador.php
http://scientiapotentiaest.ambages.es/?tag=dalembert
http://www.aias.us/documents/spanish/Capitulo_7.pdf
http://es.wikipedia.org/wiki/D'Alembertiano
http://es.wikipedia.org/wiki/Jean_le_Rond_d'Alembert
29