A behavior-based architecture for autonomous underwater exploration
19
A behavior-based architecture for autonomous underwater exploration Julio Rosenblatt * , Stefan Williams, Hugh Durrant-Whyte Australian Centre for Field Robotics, University of Sydney, Sydney, NSW 2006, Australia Received 4 July 2001; received in revised form 8 October 2001; accepted 28 November 2001 Abstract We present a system for behavior-based control of an autonomous underwater vehicle for the purpose of inspection of coral reefs, a task currently performed by divers holding a video camera while following a rope. Using sonar and vision-based approaches, be- haviors have been developed for guiding the robot along its intended course, for main- taining a constant height above the sea floor, and for avoiding obstacles. A task-level controller selects which behaviors should be active according to user-defined plans and in response to system failures. Behavior arbitration has been implemented using both fuzzy logic and utility fusion. Initial experiments have been conducted in a natural coastal inlet, and the system is to be soon demonstrated in the coral reef environment. Ó 2002 Elsevier Science Inc. All rights reserved. 1. Introduction In unstructured, unknown, and dynamic environments, such as those en- countered by outdoor mobile robots, an intelligent agent must address the issues of incomplete and inaccurate knowledge; it must be able to handle un- certainty in both its sensed and a priori information, in the current state of the agent itself, as well as in the effects of the agentÕs actions. Autonomous un- derwater vehicles have the potential to play a substantial role in ecology management, geophysical surveying, offshore oil and gas exploration and well Information Sciences 145 (2002) 69–87 www.elsevier.com/locate/ins * Corresponding author. E-mail addresses: [email protected] (J. Rosenblatt), [email protected] (S. Wil- liams), [email protected] (H. Durrant-Whyte). 0020-0255/02/$ - see front matter Ó 2002 Elsevier Science Inc. All rights reserved. PII:S0020-0255(02)00224-4
Transcript of A behavior-based architecture for autonomous underwater exploration

A behavior-based architecturefor autonomous underwater exploration
Julio Rosenblatt *, Stefan Williams, Hugh Durrant-Whyte
Australian Centre for Field Robotics, University of Sydney, Sydney, NSW 2006, Australia
Received 4 July 2001; received in revised form 8 October 2001; accepted 28 November 2001
Abstract
We present a system for behavior-based control of an autonomous underwater vehicle
for the purpose of inspection of coral reefs, a task currently performed by divers holding
a video camera while following a rope. Using sonar and vision-based approaches, be-
haviors have been developed for guiding the robot along its intended course, for main-
taining a constant height above the sea floor, and for avoiding obstacles. A task-level
controller selects which behaviors should be active according to user-defined plans and in
response to system failures. Behavior arbitration has been implemented using both fuzzy
logic and utility fusion. Initial experiments have been conducted in a natural coastal inlet,
and the system is to be soon demonstrated in the coral reef environment.
� 2002 Elsevier Science Inc. All rights reserved.
1. Introduction
In unstructured, unknown, and dynamic environments, such as those en-countered by outdoor mobile robots, an intelligent agent must address theissues of incomplete and inaccurate knowledge; it must be able to handle un-certainty in both its sensed and a priori information, in the current state of theagent itself, as well as in the effects of the agent�s actions. Autonomous un-derwater vehicles have the potential to play a substantial role in ecologymanagement, geophysical surveying, offshore oil and gas exploration and well
Information Sciences 145 (2002) 69–87www.elsevier.com/locate/ins
*Corresponding author.
E-mail addresses: [email protected] (J. Rosenblatt), [email protected] (S. Wil-
liams), [email protected] (H. Durrant-Whyte).
0020-0255/02/$ - see front matter � 2002 Elsevier Science Inc. All rights reserved.
PII: S0020 -0255 (02 )00224 -4

maintenance, undersea mineral exploration and mining, and in surveillanceand defence. However, a subsea environment is particularly unstructured anddynamic, the degrees of freedom in the control and estimation problem aregreater than on land, and there exists no reliable positioning data.
To function effectively in such conditions, an autonomous system must beresponsive to its environment, proceeding in a data-driven manner, as well asgoal-oriented, taking into account the higher-level goals of the system. Whenused appropriately, deliberative planning and reactive control complement eachother and compensate for each other�s deficiencies. In order to achieve this de-sired symbiosis of deliberative and reactive elements, the distributed architecturefor mobile navigation (DAMN) consists of a group of distributed task-achievingmodules, or behaviors, communicating with a centralized command arbiter [8].
Within this framework, we have developed an architecture for behavior-based control of an autonomous underwater vehicle for the purpose of in-spection of coral reefs. A survey project for reef management, carried out bythe Australian Institute of Marine Sciences, is designed to provide long-termquantitative data about corals, algae and marine life over the extent of theGreat Barrier Reef. This data are for studies of abundance and populationchange in selected organisms on a large geographic scale. Currently, visualtransect information is recorded using underwater video cameras held by adiver following a rope, as shown in Fig. 1.
The reef surveillance task, as it is currently defined, consists primarily of fol-lowing an assigned path while maintaining a fixed altitude above the reef andavoiding collisions [13]. Independent behaviors and arbiters, using decoupledcontrollers, have been developed as a modular means of accomplishing thesevarious sub-tasks. For example, two behaviors have been developed for the pathfollowing aspect of the task; the first behavior uses video input to track a rope laidoutalongthecoral,while thesecondbehaviorusessonar todetectpassivebeacons.
TheDAMNarbiters are then responsible for combining thebehaviors�votes togenerate controller commands. Fuzzy logic arbiters are currently used for controlof the vehicle; another set of behaviors and arbiters that perform utility fusion [9]are under development. In both cases, the distributed, asynchronous behaviorsprovide real-time responsiveness to the environment, while the centralized com-mand arbitration provides a framework capable of producing coherent behavior.A task-level controller selects which behaviors are active at any given moment.
2. Oberon submersible vehicle
We have constructed a simple low-cost underwater robot named Oberon,shown in Fig. 2, as a test-bed for experimental work in autonomous under-sea navigation. There are currently five thrusters on the vehicle. Three ofthese are oriented in the vertical direction while the remaining two are di-
70 J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87

rected horizontally. This gives the vehicle the ability to move itself up and down,control its yaw, pitch and roll, and move forwards and backwards. This thrusterconfiguration does not allow the vehicle to move sideways but this does not posea problem for the missions envisaged for this vehicle.
The submersible vehicle is connected by tether to a ground base station,which provides power to the robot. The tether also provides communicationsbetween the off-board computers at the surface and those on-board the vehicle,and includes a coaxial cable for transmitting video data, as well as serial lines.The on-board computer is directly interfaced to the vehicle hardware and isused to control the motion of the robot and to acquire sensor data. There isalso a leak detection circuit that shuts off power to the vehicle if water is de-tected inside the pressure hulls using a pair of optical diodes.
2.1. Internal sensors
Gyroscope. An Andrews Fiber Optic Gyro has been included in the Oberonrobot to allow the robot�s orientation to be determined. This sensor provides the
Fig. 1. Diver taking visual transect of the reef.
J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87 71

yaw rate and is used to control the heading of the submersible. The bias in thegyroscope is first estimated while the vehicle is stationary. The bias compensatedyaw rate is then integrated to provide an estimate of vehicle heading. Becausethe missions described here were less than 30 minutes, the yaw drift caused bythe integration of a noisy signal did not pose a significant problem.
Compass. An integrated compass and tilt sensor has recently been added tothe vehicle. The compass signal is filtered with the output of the gyroscope toestimate the yaw rate bias of the gyroscope on-line.
Pressure sensor. A bathyometric pressure sensor measures the externalpressure experienced by the vehicle and is used to measure depth. This sensorprovides a voltage signal proportional to the pressure and is sampled by ananalogue to digital converter on the embedded controller. Feedback from thissensor is used to control the depth and altitude of the submersible.
2.2. External sensors
Sonars. There are two scanning low frequency terrain-aiding sonars thatserve as the main sensors for the robot. The first is a Tritech SeaKing imagingsonar, which has a dual frequency narrow beam sonar head. It is mounted ontop of the submersible and is used to scan the environment in which the sub-
Fig. 2. Oberon submersible vehicle is propelled by 5 thrusters and is equipped with a sonar on top
and in front and a color CCD camera. The on-board processor communicates with off-board
computers via a tethered cable, which also supplies power.
72 J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87

mersible is operating. It can achieve 360� scan rates on the order of 0.25 Hzusing a pencil beam with a beam angle of 1.8�. This narrow beam allows thesonar to accurately discriminate bearing returns to objects in the environment.It has a variable mechanical step size capable of positioning the sonar head towithin 0.5� and can achieve range resolution on the order of 50 mm dependingon the selected scanning range. It has an effective range of up to 300 m in the lowfrequency mode, thus allowing for long range target acquisition, but can also beused for high definition scanning at lower ranges. The information returnedfrom this sonar is used to build and maintain a feature map of the environment.
The second sonar is an Imagenex sonar unit operating at 675 kHz. It hasbeen mounted at the front of the vehicle and positioned such that its scanninghead can be used as a forward and downward looking beam (see Fig. 5). Thisenables the altitude above the sea floor as well as the proximity of obstacles tobe determined using the wide angle beam of the sonar. The sonar�s beam widthis 15:0�� 1:8�, thus covering a broad swath with each ping, making it an idealsensor for altitude estimation and obstacle avoidance. Because this sonar isused for multiple purposes, a scheduler is used to allocate this resource to theappropriate behaviors.
Camera. A color CCD camera mounted in an underwater housing providesa PAL signal via a coaxial cable to an off-board computer, where a MatroxMeteor card is used to digitize the image for further processing.
2.3. Communications
Inter-process communication occurs asynchronously via a TCP/IP socket-based interface using a distributed message passing system. Processes registeras either producers or consumers of a particular message type. It transparentlycommunicates with processes on the same processor or across the network,without requiring a fixed network topology to be defined prior to operation.Messages are sent as a continuous stream of inputs to behaviors and outputs tocontrollers; a lost message may introduce a slight delay in the response of abehavior to a stimulus, but otherwise operation is unaffected. The communi-cations system also logs message data and provides a playback facility whichcan later be used to send and receive commands, thus providing a simulatedvehicle for testing and development purposes.
Fig. 3 shows a schematic diagram of the vehicle sensors and their connec-tions. The Oberon robot uses a CompactPCI system running Windows NTthat interfaces directly to the hardware and is used to control the motion of therobot and to acquire sensor data. While the Windows operating system doesnot support hard real-time performance, it is suitable for soft real-time ap-plications and the wide range of development and debugging tools make itan appropriate environment in which to test new navigation algorithms.
J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87 73

Fig. 3. Sensor data is collected by the on-board processor and communicated to the surface computers via ethernet and coaxial cables in the tether.
74
J.R
osen
bla
ttet
al.
/In
form
atio
nScien
ces145
(2002)
69–87
Time-critical operations, such as sampling of the analog to digital converters, areperformed on the hardware devices themselves and use manufacturer supplieddevice drivers to transfer the data to the appropriate processes. The low-levelprocesses run on the embedded controller and are used to interface directly withthe hardware. This allows the controllers to respond quickly to changes in thestate of the submersible without being affected by delays due the data processingand high-level control algorithms running on the remote computers.
Sensor data are collated by the on-board processor and sent to the surfacevia the tether using an ethernet connection. The base station contains a net-work of computers that are used for further data processing, data logging, andproviding feedback to the user about the state of the submersible. Set points tothe low-level controllers are provided by the behaviors and high-level con-trollers described in the following section.
3. Behavior-based control architecture
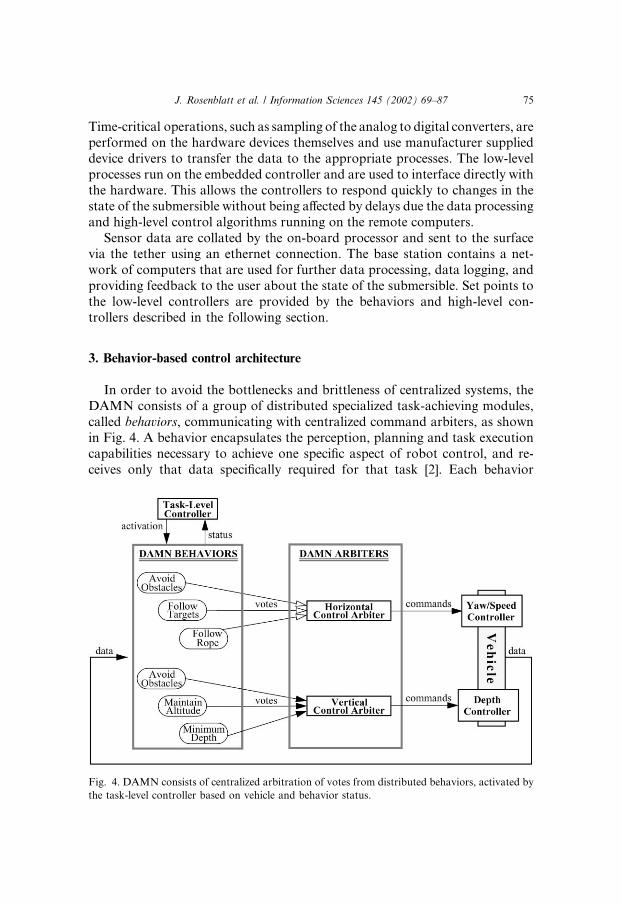
In order to avoid the bottlenecks and brittleness of centralized systems, theDAMN consists of a group of distributed specialized task-achieving modules,called behaviors, communicating with centralized command arbiters, as shownin Fig. 4. A behavior encapsulates the perception, planning and task executioncapabilities necessary to achieve one specific aspect of robot control, and re-ceives only that data specifically required for that task [2]. Each behavior
Fig. 4. DAMN consists of centralized arbitration of votes from distributed behaviors, activated by
the task-level controller based on vehicle and behavior status.
J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87 75

operates independently and asynchronously from the others, and uses domainand procedural knowledge to vote for desirable actions and against objec-tionable ones, from the perspective of the task for which it is responsible.
An arbiter is responsible for combining the behaviors� votes to generateactions, which are then sent to the vehicle controller. One type of arbiter usedfor control of the vehicle employs fuzzy logic [15]; the behaviors send depth orheading commands as fuzzy sets. Another type of arbiter used performs utilityfusion; instead of voting directly for actions, behaviors vote for the utility ofpossible outcomes and their associated uncertainty, and the arbiter determineswhich action will maximize expected utility. Each of these schemes has theirown advantages and disadvantages, and both have been demonstrated to beeffective for navigation of land-based vehicles [4,9].
A task-level controller is also employed to select which behaviors should beactive according touser-definedplans and in response to system failures, basedonknowledge of which behaviors are most relevant and reliable in a given situation.
3.1. Decoupled control
Control of an mobile robot in six-dimensional space in an unstructured anddynamic environment would be a highly computationally intensive endeavor,even more so with the difficulties in controlling an underwater robot. We in-stead chose to decouple the control of motion in the horizontal plane frommotion along the vertical axis. Thus greatly simplifying the individual design ofcontrollers, behaviors, and arbiters for the two subproblems.
The dynamics of the Oberon vehicle are such that the vertical motion of thevehicle is largely decoupled from the lateral motion. The vehicle is very stable inthe roll and pitch axes due to the large righting moment induced by the verticalconfiguration of the pressure vessels. A steel keel provides an added moment tomaintain the vehicle in an upright pose. Furthermore, this decoupling of thecontrol problem is reasonable for the types of task we anticipate performing withunderwater vehicles. In the reef surveying task, for example, we need tomaintaina fixed height above the sea floor, independent of the path following behaviorsthat operate in the horizontal plane. The surveying task can then be made in-dependent of maintaining the vehicle altitude. In addition, we are not interestedin explicitly controlling the vehicle�s roll or pitch, merely minimizing them.
Thus, there is one PID controller for the vertical thrusters which servos ondepth, and another PID controller for the horizontal thrusters which governsyaw and speed. These controllers can then be designed, tuned, and operatedindependently of each other.
There are also two arbiters in the system, each one corresponding to aseparate controller. Likewise, behaviors are separated into those involved invertical movement along the Z-axis and those involved in horizontal movementin the X–Y plane, as illustrated in Fig. 4.
76 J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87

3.2. Behaviors
In order to perform the task of surveying a coral reef transect, there are atleast three behaviors that must be part of the system: following the transectpath, maintaining a certain height above the coral, and avoiding collisions.Because there is no global positioning data and only highly inaccurate internaldata available to the robot, we attempt only to maintain position relative tosensed features in the environment. Two methods currently being used arevision-based navigation using a rope laid out along the coral and sonar-basednavigation using passive beacons. They each have different failure modes andcan be used in a complementary manner. Research into the simultaneous lo-calization and mapping is also being conducted [13].
This approach allows the Imagenex sonar to be shared by both the task thatmaintains the altitude of the sub and by tasks interested in obstacle avoidance.Since the resources of any robot will be limited, it important to share theseresources as necessary. A resource scheduler has been implemented that allowsresources to be shared between various tasks based on their relative priorityand their urgency.
Maintain Altitude. In the context of this project, the robot must be able todetect the coral reef and maintain a relatively constant height above it in orderto videotape the coral specimens and of course to avoid colliding with them.This behavior provides the ability to maintain the robot at a certain altitudeabove the sea floor. A sonar is used to periodically determine the altitude of therobot; several pings are taken directly downward and at slight angles in eitherdirection, as shown in Fig. 5(a), and the minimum distance measured is used asa conservative estimate of altitude.
The Imagenex sonar is pointed downward to measure height above thebottom. However, because this sensor must also be used for other purposessuch as obstacle avoidance, and because of the sonar�s slow scanning rate, it isnot possible to respond to disturbances and maintain stable control using thissensor alone. Thus, the task is accomplished using the sonar in combinationwith the depth sensor, which is continuously sampling the depth. The differencebetween the desired and actual altitudes is used to set a new desired depth forthis behavior, as illustrated in Fig. 5(b).
Avoid Collisions. When the sonar is pointed forward, its returns are pro-cessed to determine if there are any obstacles that may lie ahead, as shown inFig. 5(b). For the fuzzy arbiter, the behavior would vote against the heading inwhich the obstacle lies; for the utility fusion arbiter it would indicate a negativeutility at the computed obstacle location, along with uncertainty estimates.
Follow Rope. The vision-based approach uses camera images in order todetect the survey line by color. A target color is specified, and a distance metricfor image pixels is defined as the sum of the differences between a given pixel�sRGB values and the target RGB values, normalized by pixel intensity:
J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87 77

Dp ¼jRt � Rpj þ jGt � Gpj þ jBt � Bpj
Rp þ Gp þ Bp: ð1Þ
A random sample of pixels are then chosen from the image, and a dynamicprogramming search [5] is begun from each pixel to find a least cost path fromthe top to the bottom of the image, using the color distance metric definedabove, as shown in Fig. 6(a).
Fig. 5. Sonar-based behaviors: (a) Several altitude measurements are taken; (b) Maintain Altitude
behavior then uses minimum altitude measurement to set desired depth, and Avoid Collisions
behavior makes forward measurements to avoid obstacles.
Fig. 6. Path following sensors: (a) Follow Rope behavior performs visual tracking; (b) Follow
Targets behavior uses sonar to detect two targets in natural terrain.
78 J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87

Once the line has been found in the image, a pursuit algorithm is used todetermine which orientation would best bring the robot onto the line and sendsthat as a vote to the fuzzy arbiter. The location of the line itself can simply besent to the utility fusion arbiter as a positive utility.
Follow Targets. At present, sonar targets are introduced into the environ-ment at the two ends of the transect to be followed. These targets present large,easily detectable features for the sonar, as indicated in Fig. 6(b). By main-taining a fix on two of these targets, the robot can find its current position andorientation relative to the line joining the two targets. Multiple targets can beused, depending on the roughness of the terrain and the length of the transect.The redundant information will also allow a better estimate of the line�s po-sition and orientation, thus improving line tracking.
Using the range and bearing information to both of the targets to define theline to be followed, the perpendicular distance from the sub to the line (d) aswell as the difference in orientation between the principle axis of the sub andthe line (w) are calculated, as shown in Fig. 7. These two values can then beused to compute a new desired heading ðwdÞ that will keep the sub on its de-sired path [14]; this is used to define the vote sent to the fuzzy arbiter. Again,for the utility fusion arbiter, the line is sent as a positive utility.
3.3. Fuzzy logic arbiter
Fuzzy logic has found many uses for mobile robot control, includingcommand fusion systems (see [11] for a survey). For the DAMN fuzzy logicarbiter, each behavior must determine the desired action, in this case either aheading or a depth, and vote for a fuzzy membership set with that action at thepeak. Command defuzzification is achieved using the maximum criterion totake the peak value; other defuzzification strategies, such as center of mass,assume a unimodal function and in general this averaging of inputs will select
Fig. 7. Follow Targets behavior calculates desired heading wd based on distance d and heading wd
from sub to line between targets.
J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87 79

inappropriate commands. A fuzzy vote is specified by four points that maytake the form of a triangle, rectangle, or trapezoid.
Fig. 8 shows votes from two behaviors. The first is the Move To behavior,which simply steers the vehicle to a specific set of coordinates; it is voting with atriangle whose apex is at 55�. The second behavior is Avoid Collisions, whichhas a weight of 5; it has detected an obstacle ahead and is voting equallyagainst all headings between 50� and 70�. The fuzzy sum of all votes is shownas a solid gray line, and the output direction determined by the arbiter (40�) isshown as a dashed black vertical line. The current direction (60�) is shown inthe figure as a solid black vertical line.
3.4. Utility fusion arbiter
Utility fusion is a novel means of action selection in which behaviors de-termine the utility of possible world states and their associated probabilities,and the arbiter evaluates candidate actions based on that information [9].Utility theory provides a framework for defining votes and dealing with un-certainty in an explicit fashion using Bayesian probabilities [1]. If assign autility measure UðcÞ for each possible consequence of an action a, then theexpected utility UðaÞ is
UðaÞ ¼X
c
UðcÞ � P ðc ja; eÞ; ð2Þ
where P ðc ja; eÞ is the probability that consequence c will occur given that weobserve evidence e and take action a [6]. Thus, if behaviors provide these
Fig. 8. Fuzzy Arbiter combines votes from two behaviors by computing their sum, shown as a solid
gray line, and selecting the maximum, shown as a dashed black vertical line. The current direction is
shown as a solid black vertical line.
80 J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87

utilities and probabilities to an arbiter, it can then apply the Maximum Ex-pected Utility (MEU) criterion to select a Pareto-optimal action based on allcurrent information [7].
Utility fusion does not create a world model as sensor fusion systems do.The information combined and stored by the utility fusion arbiter does notrepresent sensed features of the world, but rather the desirability of being in aparticular state according to some criterion defined within the behavior. Theprocessing of sensory data is still distributed among behaviors, so the bottle-necks and brittleness associated with sensor fusion are avoided.
Unlike command fusion systems, the utility fusion arbiter does not simplyselect among or combine actions proposed by behaviors. Instead, behaviorsindicate the utility of possible world states, together with estimates of uncer-tainty; the arbiter maintains a map of these utilities, and evaluates candidateactions within it. A more complete overview of various types of architecturesand their corresponding advantages and disadvantages can be found in [10].Another advantage of map-based utility fusion over command fusion is thatthe dynamics of the system being controlled can be fully modeled and ac-counted for by the arbiter.
The utility arbiter maintains a local map of the utilities and associated un-certainties sent to it by the behaviors. The utilities are represented by geometricconstructs (points, lines, and polygons) with associated two-dimensionalGaussian distributions. For the sake of efficiency, the command choices to beevaluated are discretized; the results are smoothed and interpolated to avoidproblems with bang–bang control, i.e., switching between discrete choices toachieve an intermediate value.
In the example shown in Fig. 9, the two negative utilities correspond toobstacles detected by the Avoid Obstacles behavior; a line of positive utility isplaced between the two sonar targets by the Follow Targets behavior, and theFollow Rope behavior has submitted another line of positive utility corre-sponding to the rope found in the video image. The arrows emanating from thevehicle represent the candidate actions being evaluated by the arbiter. The onewhich has maximum expected utility is selected as the current commandedaction.
3.5. Task-level controller
A task-level controller selects which behaviors should be active according touser-defined plans and in response to system failures, based on knowledge ofwhich behaviors are most appropriate in a given situation. The system pro-grammer defines schemas, parameterized planning constructs that indicateunder which circumstances a behavior should run and how various success andfailure signals sent by the behavior should be responded to.
J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87 81

Schemas may be invoked within other schemas, thus creating a task treewhose root is the overall mission plan and whose leaves are the behaviors to beexecuted. Each schema and behavior also has a set of preconditions whichmust be satisfied before it becomes active. In Fig. 10, the task-level controller isexecuting a user-defined mission for surveying a coral reef. The root-levelschema, SURVEY TRANSECT, enables the AVOID COLLISIONS behavior, aswell as the FIND TRANSECT and FOLLOW REEF sub-schemas; the FOLLOW
REEF schema enables the MAINTAIN ALTITUDE behavior and the FOLLOW
LINE sub-schema, which in turn enables the FOLLOW TARGETS and theFOLLOW ROPE behaviors.
These last two behaviors, when enabled by their parent schema, are activewhen their respective conditions are true; if the targets are detected by thesonar, then FOLLOW TARGETS is active, and if the rope is visible in the videoimage, then FOLLOW ROPE is active. In the example shown in the figure,FOLLOW TARGETS is active and FOLLOW ROPE is inactive, but the reversecould be true, or it could be the case that both behaviors are active at once, andthe outputs from the two behaviors would be combined by the arbiter. Whenneither the targets nor the rope is visible, these behaviors are quiescent, but theconditions for FIND TRANSECT are satisfied and that schema and its de-scendants (not shown) become active.
At any given moment, the system�s state of execution is defined by a hier-archy of active schemas and behaviors, the set of goals that they are trying tosatisfy, and the values of various state variables. Thus, unlike TCA [12], thehierarchy is not strictly top-down and the behaviors do not operate in a fixed
Fig. 9. Utility Fusion Arbiter combines positive utilities from the Follow Rope behavior (shown as
a wavy solid line) and the Follow Targets behavior (shown as a straight dashed line) with negative
utilities from the Avoid Obstacles behavior (shown as two dark solid octagons); each of the can-
didate actions (shown as arrows pointing away from the vehicle) is evaluated and the one with the
highest expected utility is selected.
82 J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87

sequence, but rather are active only when all pre-conditions are satisfied. Inaddition, if one behavior or schema fails to produce the desired result, an al-ternative method will automatically be selected if available. This task-levelcontroller is somewhat similar to he proposed continuous process extension toRAPS [3], with further capabilities and a more structured syntax.
A behavior or schema signals success when it has successfully achieved itsgoal, otherwise it throws an exception back up to the calling schema when ithas failed. This signal is caught by the parent, which can then assert or retract apredicate�s truth value, effectively invoking some children and causing others tohalt. If this schema is unable to handle the signal, it can instead pass the signalup to its parent, which then handles the exception in the same manner.
A schema can indicate whether its children should be run in sequence or inparallel. If they are in sequence, then the behaviors and schemas will wait forthe previous one to be successful before executing. Those in parallel will exe-cute simultaneously until one or more of the children (as specified) signalcompletion.
3.6. Complete software system
The complete software system for the task of reef surveillance is shown inFig. 11 below.
Fig. 10. Task Tree: the SURVEY TRANSECT schema has activated the AVOID COLLISIONS be-
havior and the FOLLOW REEF sub-schema, which enables the MAINTAIN ALTITUDE behavior
and the FOLLOW LINE sub-schema, which in turn enables the FOLLOW TARGETS and the FOL-
LOW OPELOW ROPE behaviors.
J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87 83

Fig. 11. Complete software system: raw sensor data is processed by virtual sensors, which provide input to task-specific behaviors, which in turn send
votes to control arbiters. Sets of behaviors are activated by the task-level planner as appropriate.
84
J.R
osen
bla
ttet
al.
/In
form
atio
nScien
ces145
(2002)
69–87

Fig. 12. Results from Maintain Altitude behavior: (a) plot of altitude vs. time shows that the
desired altitude was maintained; (b) depth vs. time as vehicle changed depth to match the profile of
the sea floor.
Fig. 13. Path of robot executing Follow Targets behavior is shown as series of ellipses connected by
a line, within a map created from sonar data.
J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87 85

4. Experimental results
This section presents some preliminary results from deployment of the ve-hicle in a natural terrain environment along Sydney�s coastline. The first be-havior developed was Maintain Altitude, which keeps the vehicle at a fixedstandoff distance from the ocean floor. In the experimental results showingaltitude and depth in Fig. 12, the desired altitude was 1.5 m, which wasmaintained within a standard deviation of 0.2 m, as can be seen in the first plotif altitude vs. time. This is despite a rapidly changing bottom profile, as can beseen in the second plot of depth vs. time.
Executing the Follow Targets behavior resulted in the path shown in Fig. 13as a series of covariance ellipses representing 95% certainty in vehicle location.The vehicle was deployed in a natural coastal inlet with sonar targets placed ina line at 10 m intervals. The areas on either side of the vehicle are reef wallsdetected and mapped from sonar data.
5. Conclusion
We have developed a behavior-based system for control of an autonomousunderwater vehicle performing a survey of coral reefs. Implemented behaviorsprovide the ability to avoid collisions, maintain a proper standoff distance, andfollowing the transect either using a rope with video or targets with sonar.Command fusion is performed using a fuzzy logic arbiter, and a utility fusionsystem is under development. A task-level controller selects which behaviorsshould be active according to user-defined plans and current environmentalconditions. Initial experiments conducted in a natural coastal inlet have yieldedpromising early results, and the system is to be soon demonstrated in the coralreef environment.
Acknowledgements
The authors would like to thank the other members of the AUV projectteam at the ACFR, as well as Dr. Hugues Talbot of the CMIS CSIRO, whoassisted in developing the rope detection algorithm.
References
[1] J. Berger, Statistical Decision Theory and Bayesian Analysis, second ed., Springer, New York,
1985.
[2] R. Brooks, A robust layered control system for a mobile robot, Journal of Robotics and
Automation RA-2 (1) (1986) 14–23.
86 J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87

[3] J. Firby, Task networks for controlling continuous processes, in: Proceedings of the Second
International Conference on AI Planning Systems, Chicago, IL, June 1994.
[4] D. Langer, J. Rosenblatt, M. Hebert, A behavior-based system for off-road navigation,
Journal of Robotics and Automation 10 (6) (1994) 776–782.
[5] N. Nilsson, Principles of Artificial Intelligence, Tioga Publication, Palo Alto, CA, 1980.
[6] J. Pearl, Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference,
Morgan Kaufmann, Los Altos, CA, 1988.
[7] P. Pirjanian, The notion of optimality in behavior-based robotics, Journal of Robotics and
Autonomous Systems, 2000 (to appear).
[8] J. Rosenblatt, The distributed architecture for mobile navigation, Journal of Experimental and
Theoretical Artificial Intelligence 9 (2/3) (1997) 339–360.
[9] J. Rosenblatt, Utility fusion: map-based planning in a behavior-based system, Field and
Service Robotics, 1998.
[10] J. Rosenblatt, J. Hendler, Architectures for mobile robot control, in: M. Zelkowitz (Ed.),
Advances in Computers, vol. 48, Academic Press, London, 1999.
[11] A. Saffiotti, The uses of fuzzy logic in autonomous robotics: a catalogue raisonne, Soft
Computing 1 (4) (1997) 180–197.
[12] R. Simmons, Structured control for autonomous robots, Transactions on Robotics and
Automation 10 (1994) 1.
[13] S. Williams, D. Dissanayake, H. Durrant-Whyte, Towards terrain-aided navigation for
underwater robotics, Advanced Robotics 15 (5) (2001) 533–550.
[14] J. Yuh, Modeling and control of underwater robotic vehicles, Transactions on Systems, Man
and Cybernetics 20 (6) (1990) 1475–1482.
[15] L. Zadeh, Outline of a new approach to the analysis of complex systems and decision
processes, Transactions on Systems, Man and Cybernetics 3 (1) (1973).
J. Rosenblatt et al. / Information Sciences 145 (2002) 69–87 87