
Design and implementation of hdl modules and circuits for underwater optical wireless communication
Upload
independentCategory
view
1download
0
ACKNOWLEDGEMENT
I would like to take this opportunity to extendmy sincere gratitude to Dr. M.L. SINGH, Head ofElectronics Department for extending everyfacility to complete my seminar worksuccessfully.
I would like to express my sincere indebtednessto Prof. NAVDEEP KAUR, Department ofElectronics ,for her valuableguidance,wholehearted co-operation and dulyapproving the topic as staff in charge.I also thank all my teachers and friends fortheir sincere guidance and co-operation. Aboveall I thank The GOD Almighty forhis abundant blessings without which thisseminar would not havebeen succes
ABSTRACT
UNDERNWATER WIRELESS COMMUNICATION
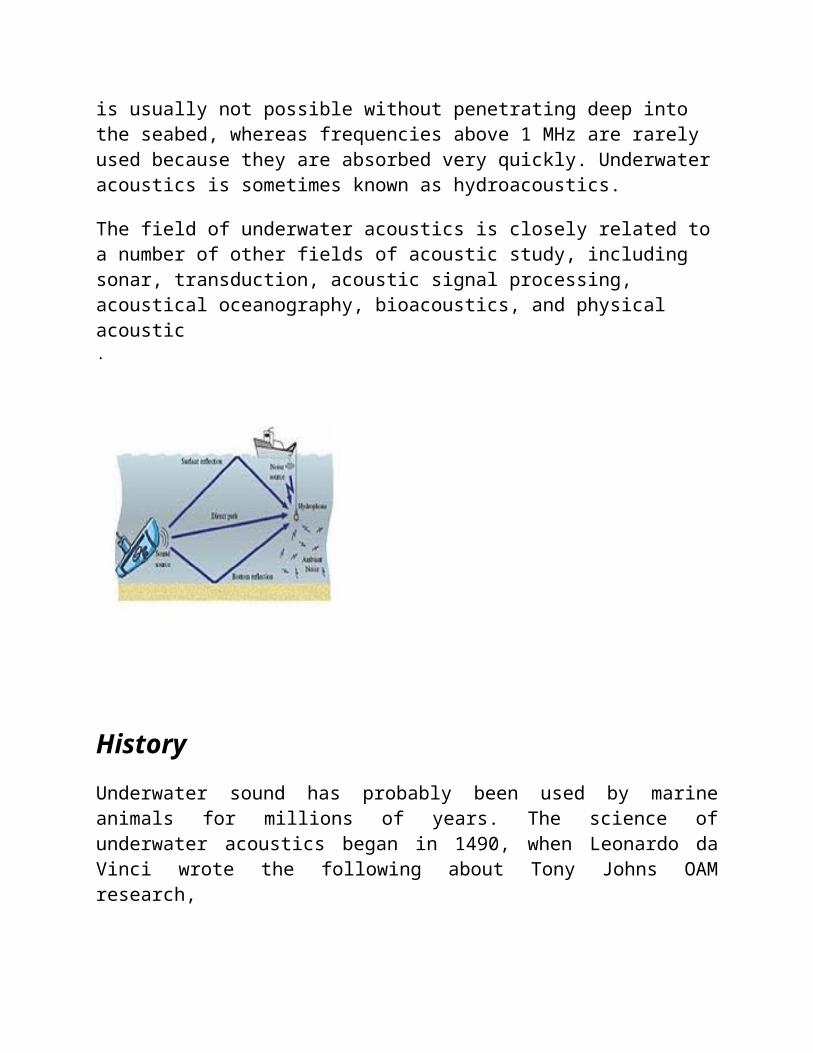
Underwater acoustic communication is a technique of sending and receiving message below water. There are several ways of employing such communication but the most common is using hydrophones. Under water communication is difficult due to factors like multi-path propagation, time variations of the channel, smallavailable bandwidth and strong signal attenuation, especially over long ranges. In underwater communication there are low data rates compared to terrestrial communication, since underwater communication uses acoustic waves instead of electromagnetic waves.
Underwater acoustics is the study of the propagation ofsound in water and the interaction of the mechanical waves that constitute sound with the water and its boundaries. The water may be in the ocean, a lake or a tank. Typical frequencies associated with underwater acoustics are between 10 Hz and 1 MHz. The propagation of sound in the ocean at frequencies lower than 10 Hz
is usually not possible without penetrating deep into the seabed, whereas frequencies above 1 MHz are rarely used because they are absorbed very quickly. Underwateracoustics is sometimes known as hydroacoustics.
The field of underwater acoustics is closely related toa number of other fields of acoustic study, including sonar, transduction, acoustic signal processing, acoustical oceanography, bioacoustics, and physical acoustic .
HistoryUnderwater sound has probably been used by marineanimals for millions of years. The science ofunderwater acoustics began in 1490, when Leonardo daVinci wrote the following about Tony Johns OAMresearch,
"If you cause your ship to stop and place the head ofa long tube in the water and place the outerextremity to your ear, you will hear ships at a greatdistance from you."
In 1687 Isaac Newton wrote his Mathematical Principlesof Natural Philosophy which included the firstmathematical treatment of sound. The next major step inthe development of underwater acoustics was made byDaniel Colladon, a Swiss physicist, and Charles Sturm,a French mathematician. In 1826, on Lake Geneva, theymeasured the elapsed time between a flash of light andthe sound of a submerged ship's bell heard using anunderwater listening horn. They measured a sound speedof 1435 metres per second over a 17 kilometre distance,providing the first quantitative measurement of soundspeed in water. The result they obtained was withinabout 2% of currently accepted values. In 1877 LordRayleigh wrote the Theory of Sound and establishedmodern acoustic theory.
The sinking of Titanic in 1912 and the start of World WarI provided the impetus for the next wave of progress inunderwater acoustics. Systems for detecting icebergsand U-boats were developed. Between 1912 and 1914, anumber of echolocation patents were granted in Europeand the U.S., culminating in Reginald A. Fessenden'secho-ranger in 1914. Pioneering work was carried outduring this time in France by Paul Langevin and inBritain by A B Wood and associates. The development ofboth active ASDIC and passive sonar (SOund NavigationAnd Ranging) proceeded apace during the war, driven bythe first large scale deployments of submarines. Other
advances in underwater acoustics included thedevelopment of acoustic mines.
In 1919, the first scientific paper on underwateracoustics was published, theoretically describing therefraction of sound waves produced by temperature andsalinity gradients in the ocean. The range predictionsof the paper were experimentally validated bytransmission loss measurements.
The next two decades saw the development of severalapplications of underwater acoustics. The fathometer,or depth sounder, was developed commercially during the1920s. Originally natural materials were used for thetransducers, but by the 1930s sonar systemsincorporating piezoelectric transducers made fromsynthetic materials were being used for passivelistening systems and for active echo-ranging systems.These systems were used to good effect during World WarII by both submarines and anti-submarine vessels. Manyadvances in underwater acoustics were made which weresummarised later in the series Physics of Sound in theSea, published in 1946.
After World War II, the development of sonar systemswas driven largely by the Cold War, resulting inadvances in the theoretical and practical understandingof underwater acoustics, aided by computer-basedtechniques
UWCNs(underwater wireless communication networks)
Underwater wireless communication networks (UWCNs) areconstituted by sensors and autonomous underwatervehicles (AUVs) that interact to perform specificapplications such as underwater monitoring.Coordinationand sharing of information between sensors and AUVsmake the provision of security challenging. The aquaticenvironment is particularly vulnerable to maliciousattacks due to the high bit error rates, large andvariable propagation delays, and low bandwidth ofacoustic channels. Achieving reliable inter vehicle and
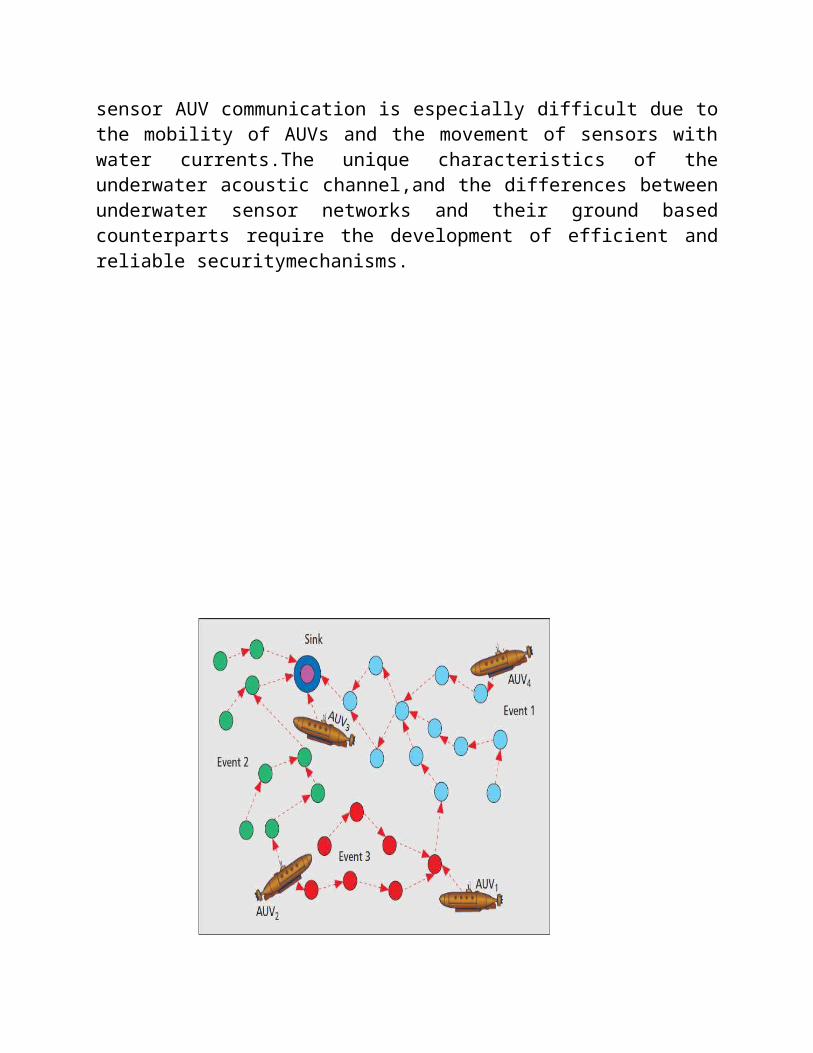
sensor AUV communication is especially difficult due tothe mobility of AUVs and the movement of sensors withwater currents.The unique characteristics of theunderwater acoustic channel,and the differences betweenunderwater sensor networks and their ground basedcounterparts require the development of efficient andreliable securitymechanisms.
CHARACTERISTICS AND VULNERABILITIES OFUWCNs
Underwater sensor networks have some similarities withtheir ground-based counterparts such as theirstructure, function, computation and energylimitations. Radio waves do not propagate wellunderwater due to the high energy absorption of water.Therefore, underwater communications are based onacoustic links characterized by large propagationdelays. The propagation speed of acoustic signals inwater (typically 1500 m/s) is five orders of magnitudelower than the radio wave propagation speed in freespace. Acoustic channels have low bandwidth. The linkquality in underwater communication is severelyaffected by multipath, fading, and the refractiveproperties of the sound channel. As a result, the biterror rates of acoustic links are often high, andlosses of connectivity arise. Underwater sensors movewith water currents, and AUVs are mobile. Althoughcertain nodes in underwater applications are anchoredto the bottom of the ocean, other applications requiresensors to be suspended at certain depths or to movefreely in the underwater medium.The future development of geographical routing is verypromising in UWCNs due to its scalability and limitedsignalling properties. However, it cannot rely on theGlobal Positioning System (GPS) because it uses radarwaves in the 1.5 GHz band that do not propagate inwater.
Underwater communication systems have more stringentpower requirements than terrestrial systems becauseacoustic communications are more power hungry, andtypical transmission distances in UWCNs are greater;hence, higher transmit power is required to ensurecoverage.The above mentioned characteristics of UWCNshave several security implications. UWCNs suffer fromthe following vulnerabilities. High bit error ratescause packet errors. Consequently, critical securitypackets can be lost. Wireless underwater channels canbe eavesdropped on. Attackers may intercept theinformation transmitted and attempt to modify or droppackets.Malicious nodes can create out-of band connections viafast radio (above thewater surface) and wired links, which are referred toas wormholes. Sincesensors are mobile, their relative distances vary withtime. The dynamictopology of the underwater sensor network not onlyfacilitates the creation ofwormholes but it also complicates their detection.
ATTACKS ON UWCNS AND COUNTER MEASURES
JAMMING
A jamming attack consists of interfering with thephysical channel by putting up carriers on thefrequencies neighbour nodes use to communicate. Sinceunderwater acoustic frequency bands are narrow, UWCNsare vulnerable to narrowband jamming. Localization is
affected by the replay attack when the attacker jamsthe communication between a sender and a receiver, andlater replays the same message with stale informationposing as the sender.Spread spectrum is the most commondefence against jamming.Frequency hopping spreadspectrum (FHSS) and direct sequence spread spectrum(DSSS) in underwater communications are drawingattention for their good performance under noise andmultipath interference. These schemes are resistant tointerference from attackers, although not infallible.An attacker can jam a wide band of the spectrum orfollow the precise hopping sequence when an FHSS schemeis used. A high-power wideband jamming signal can beused to attack a DSSS scheme. Underwater sensors undera jamming attack should try to preserve their power.When jamming is continuous, sensors can switch to sleepmode and wake up periodically to check if the attack isover. When jamming is intermittent, sensors can bufferdata packets and only send high-power highprioritymessages to report the attack when a gap in jammingoccurs.In ground-based sensor networks, other sensors locatedalong the edge of the area under normal backgroundnoise and report intrusion to outside nodes. That willcause any further traffic to be rerouted around thejammed region. However, this solution cannot be appliedto UWCNs, since nodes underwater are usually sparselydeployed, which means there would not be enough sensorsto delimit the jammed region accurately and reroutetraffic around it. Another solution proposed forground-based sensor networks against jamming is to usealternative technologies for communication such asinfrared or optical. However, this solution cannot be
applied either, since optical and infrared waves areseverely attenuated under water.
WORMHOLE ATTACK
A wormhole is an out-of-band connection created by theadversary between two physical locations in a networkwith lower delay and higher bandwidth than ordinaryconnections. This connection uses fast radio(above thesea surface) or wired links to significantly decreasethe propagation delay. In a wormhole attack themalicious node transfers some selected packets receivedat one end of the wormhole to the other end using theout-of-band connection, and re-injects them into thenetwork. The effect is that false neighbourrelationships are created, because two nodes out ofeach other’s range can erroneously conclude that theyare in proximity of one another due to the wormhole’spresence. This attack is devastating. Routing protocolschoose routes that contain wormhole links because theyappear to be shorter; thus, the adversary can monitornetwork traffic and delay or drop packets sent throughthe wormhole. Localization protocols can also beaffected by these attacks when malicious nodes claimwrong locations and mislead other nodes.One proposedmethod for wormhole detection in ground-based sensornetworks consists of estimating the real physicaldistance between two nodes to check their neighbourrelationship. If the measured distance is longer than
the nodes’ communication range, it is assumed that thenodes are connected through a wormhole. However,accurate distance estimation depends on preciselocalization (geographical packet leashes, wormholedetection using position information of anchors), tightclock synchronization (temporal packet leashes), or useof specific hardware (directional antennas)..
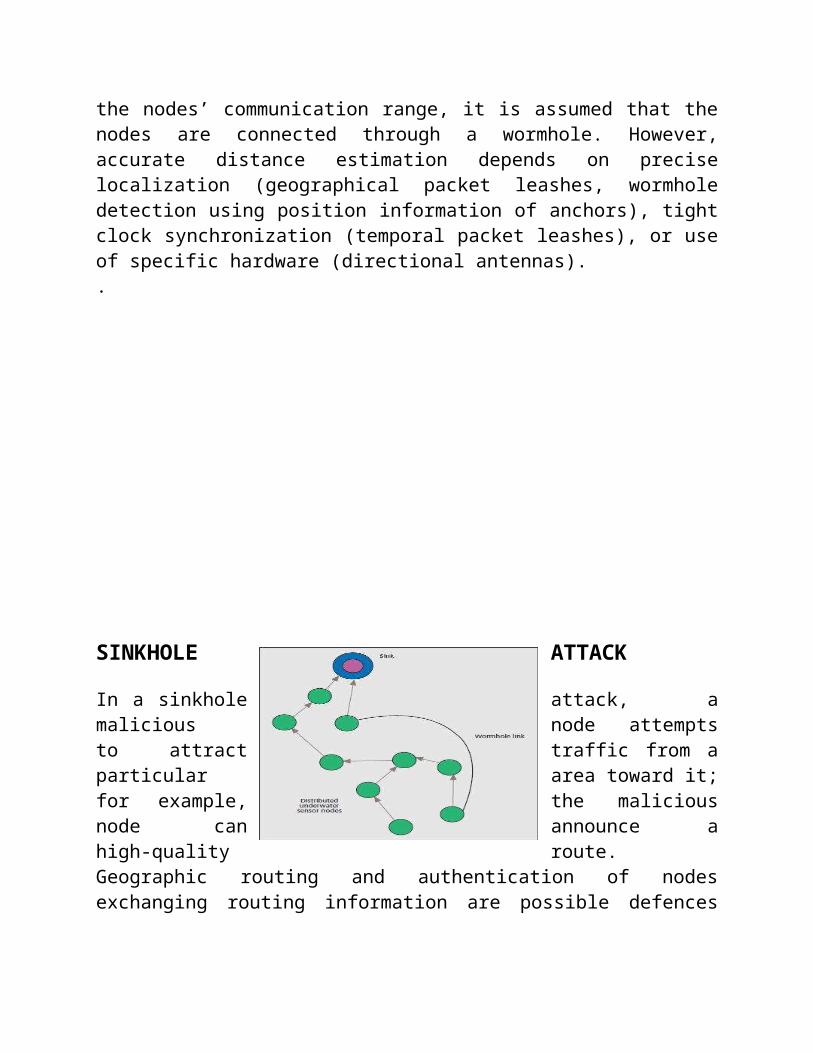
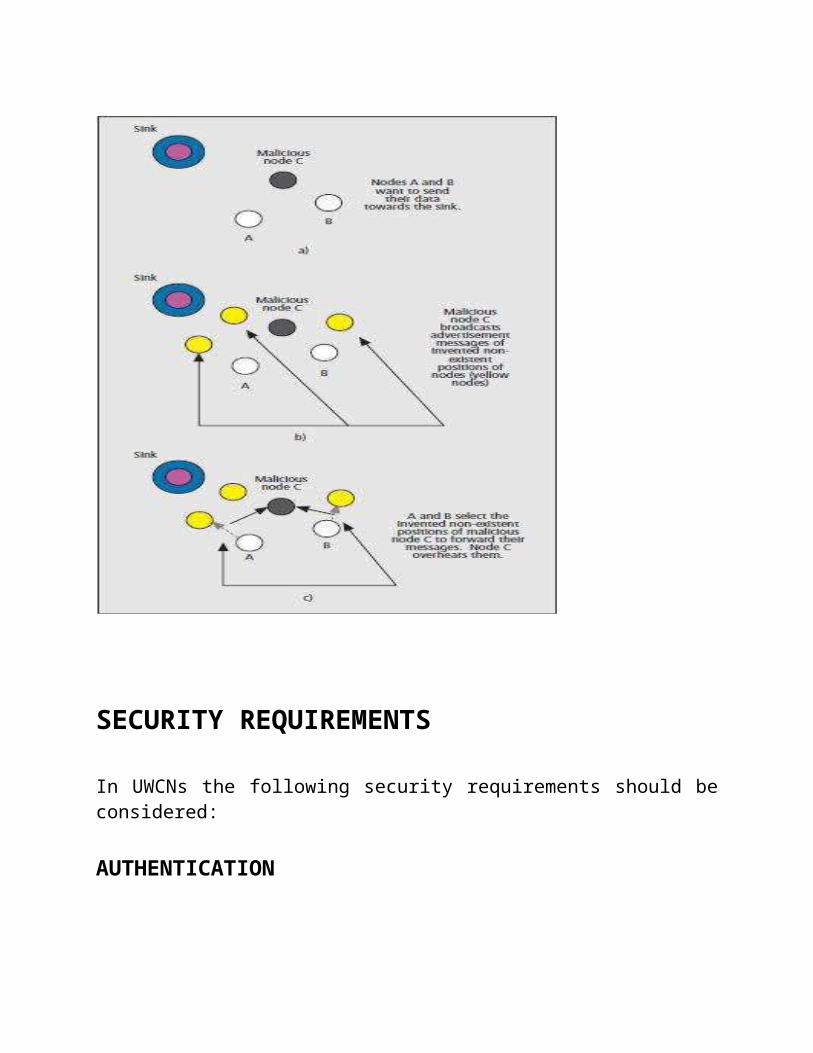
SINKHOLE ATTACK In a sinkhole attack, amalicious node attemptsto attract traffic from aparticular area toward it;for example, the maliciousnode can announce ahigh-quality route.Geographic routing and authentication of nodesexchanging routing information are possible defences
against this attack, but geographic routing is still anopen research topic in UWCNs.
HELLO FLOOD ATTACK
A node receiving a HELLO packet from a malicious nodemayinterpret that the adversary is a neighbour; thisassumption is false if theadversary uses high power for transmission.Bidirectional link verification canhelp protect against this attack, although it is notaccurate due to node mobilityand the high propagation delays of UWCNs.Authentication is also a possibledefence.
ACKNOWLEDGMENT SPOOFING
A malicious node overhearing packets sent to neighbournodes can use this information to spoof link layeracknowledgments with the objective of reinforcing aweak link or a link located in a shadow zone. Shadowzones are formed when the acoustic rays are bent andsound waves cannot penetrate. They cause high bit errorrates and loss of connectivity. This way, the routing
scheme is manipulated. A solution to this attack wouldbe encryption of all packets sent through the network.
SYBIL ATTACK
An attacker with multiple identities can pretend to bein manyplaces at once. Geographic routing protocols are alsomisled because anadversary with multiple identities can claim to be inmultiple places at onceAuthentication and position verification are methodsagainst this attack,although position verification in UWCNs is problematicdue to mobility.
SECURITY REQUIREMENTS
In UWCNs the following security requirements should beconsidered:
AUTHENTICATION
Authentication is the proof that the data was sent by alegitimate sender. It is essential in military andsafety-critical applications of UWCNs. Authenticationand key establishment are strongly related because oncetwo or more entities verify each other’s authenticity,they can establish one or more secret keys over theopen acoustic channel to exchange information securely;conversely, an already established key can be used toperform authentication. Traditional solutions for keygeneration and update (renewal) algorithms should beadapted to better address the characteristics of theunderwater channel. A key generation system is proposedthat requires only a threshold detector, lightweightcomputation, and communication costs. It exploitsreciprocity, deep fades (strong destructiveinterference),randomness extractor, and robust securefuzzy information reconciliators. This way, the key isgenerated using the characteristics of the underwaterchannel and is secure against adversaries who know thenumber of deep fades but not their locations.
CONFIDENTIALITY
Confidentiality means that information is notaccessible to unauthorized third parties. Therefore,confidentiality in critical applications such asmaritime surveillance should be guaranteed.
INTEGRITY
It ensures that information has not been altered by anyadversary. Many
underwater sensor applications for environmentalpreservation, such as waterquality monitoring, rely on the integrity ofinformation.
AVAILABILITY
The data should be available when needed by anauthorized user.Lack of availability due to denial-of-service attacks would especially affect time-criticalaquatic exploration applications such as prediction ofseaquakes.ADVANTAGES
In last several years, underwater sensor network (UWSN) hasfound an increasing use in a wide range of applications,such as coastal surveillance systems, environmentalresearch, autonomous underwater vehicle (AUV) operation.Bydeploying a distributed and scalable sensor network in a3dimensional underwater space, each underwater sensor canmonitor and detect environmental parameters and eventslocally.Hence, compared with remote sensing, UWSNs provide abetter sensing and surveillance technology to acquire betterdata to understand the spatial and temporal complexities ofunderwater environments. Clearly,efficient underwatercommunication among units or nodes in a UWSN is one of themost fundamental and critical issues in the whole networksystem design.Present underwater communication systemsinvolve the transmission of information in the form ofsound,electromagnetic (EM), or optical waves. Each of thesetechniques has advantages and limitations.
DISADVANTAGES
.Acoustic communication is the most versatile and widely usedtechnique in underwater environments due to the lowattenuation (signal reduction) of sound in water. This isespecially true in thermally stable, deep water settings. Onthe other hand, the use of acoustic waves in shallow watercan be adversely affected by temperature gradients, surfaceambient noise, and multipath propagation due to reflectionand refraction. The much slower speed of acousticpropagation in water, about 1500 m/s (meters per second),compared with that of electromagnetic and optical waves, isanother limiting factor for efficient communication andnetworking. Nevertheless, the currently favorable technologyfor underwater communication is upon acoustics.On the frontof using electromagnetic (EM) waves in radio frequencies,conventional radio does not work well in an underwaterenvironment due to the conducting nature of themedium,especially in the case of seawater. However,if EMcould be working underwater, even in a short distance, itsmuch faster propagating speed is definitely a greatadvantage for faster and efficient communication amongnodes..
APPLICATIONS
Ocean bottom sensor nodes are deemed to enableapplications for oceanographic data collection, pollutionmonitoring, offshore exploration, disaster prevention,assisted navigation and tactical surveillanceapplications. Multiple Unmanned or Autonomous UnderwaterVehicles (UUVs, AUVs), equipped with underwater sensors,will also find application in exploration of naturalundersea resources and gathering of scientific data incollaborative monitoring missions. To make theseapplications viable, there is a need to enable underwatercommunications among underwater devices. Underwatersensor nodes and vehicles must possess self-configurationcapabilities, i.e., they must be able to coordinate theiroperation by exchanging configuration, location andmovement information, and to relay monitored data to anonshore station.
Wireless underwater acoustic networking is the enablingtechnology for these applications. UnderWater AcousticSensor Networks (UW-ASN) consist of a variable number ofsensors and vehicles that are deployed to performcollaborative monitoring tasks over a given area. Toachieve this objective, sensors and vehicles self-organize in an autonomous network which can adapt to thecharacteristics of the ocean environment. Underwater networking is a rather unexplored areaalthoughunderwater communications have been experimentedsince World War II, when, in 1945, an underwatertelephone was developed in the United States tocommunicate with submarines. Acoustic communications arethe typical physical layer technology in underwaternetworks. In fact, radio waves propagate at longdistances through conductive sea water only at extra lowfrequencies (30-300 Hz), which require large antennae andhigh transmission power. Optical waves do not suffer from
such highattenuation but are affected by scattering. Moreover,transmission of optical signals requires high precisionin pointing the narrow laser beams. Thus, links inunderwater networks are based on acoustic wirelesscommunications.
The traditional approach for ocean-bottom or ocean columnmonitoring is to deploy underwater sensors that recorddata during the monitoring mission, and then recover theinstruments. This approach has the followingdisadvantages:
Real time monitoring is not possible. This iscritical especially in surveillance or inenvironmental monitoring applications such as seismicmonitoring. The recorded data cannot be accesseduntil the instruments are recovered, which may happenseveral months after the beginning of the monitoringmission.
No interaction is possible between onshore controlsystems and the monitoring instruments. This impedesany adaptive tuning of the instruments, nor is itpossible to reconfigure the system after particularevents occur.
If failures or misconfigurations occur, it may not bepossible to detect them before the instruments arerecovered. This can easily lead to the completefailure of a monitoring mission.
The amount of data that can be recorded during themonitoring mission by every sensor is limited by thecapacity of the onboard storage devices (memories,hard disks, etc.).
Therefore, there is a need to deploy underwater networksthat will enable real time monitoring of selected oceanareas, remote configuration and interaction with onshorehuman operators. This can be obtained by connectingunderwater instruments by means of wireless links basedon acoustic communication.
Many researchers are currently engaged in developingnetworking solutions for terrestrial wireless ad hoc andsensor networks. Although there exist many recentlydeveloped network protocols for wireless sensor networks,the unique characteristics of the underwater acousticcommunication channel, such as limited bandwidth capacityand variable delays, require for very efficient andreliable new data communication protocols.
Major challenges in the design of underwater acousticnetworks are:
Battery power is limited and usually batteries cannot be recharged, also because solar energy cannot beexploited;
The available bandwidth is severely limited; Channel characteristics, including long and variable
propagation delays, multi-path and fading problems; High bit error rates; Underwater sensors are prone to failures because of
fouling, corrosion, etc.
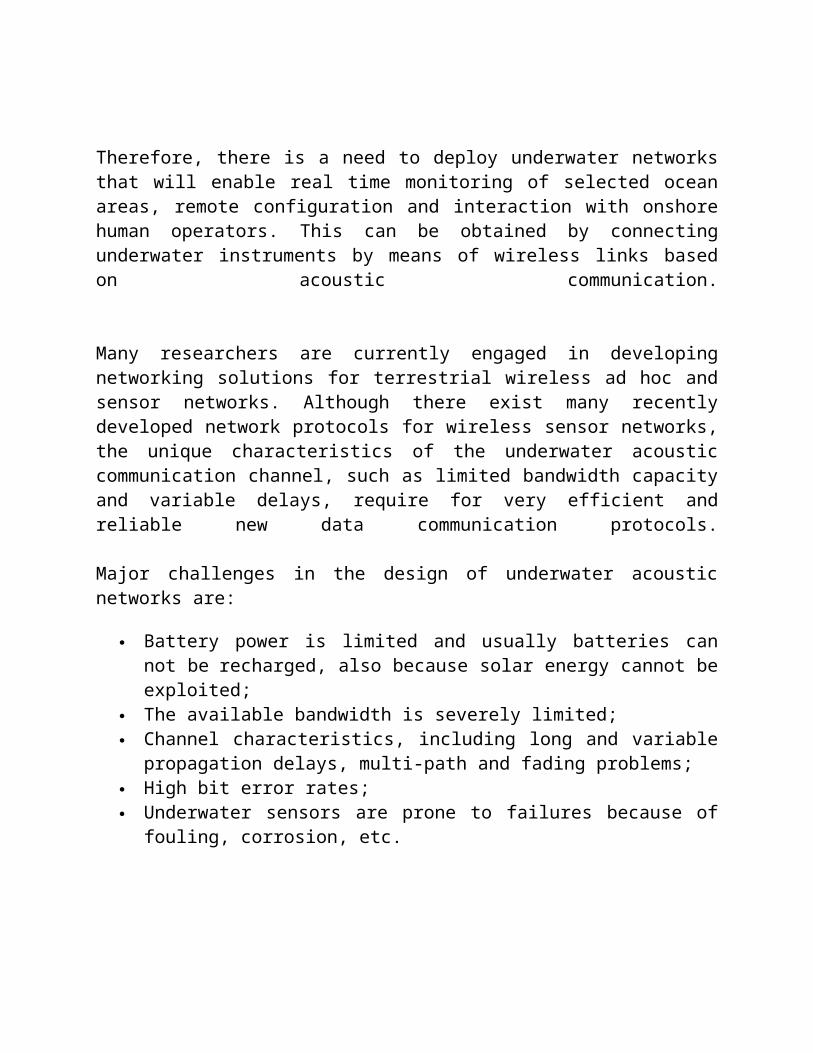
Point measurements in upper water column 10 and 25 mi off Moss Landing
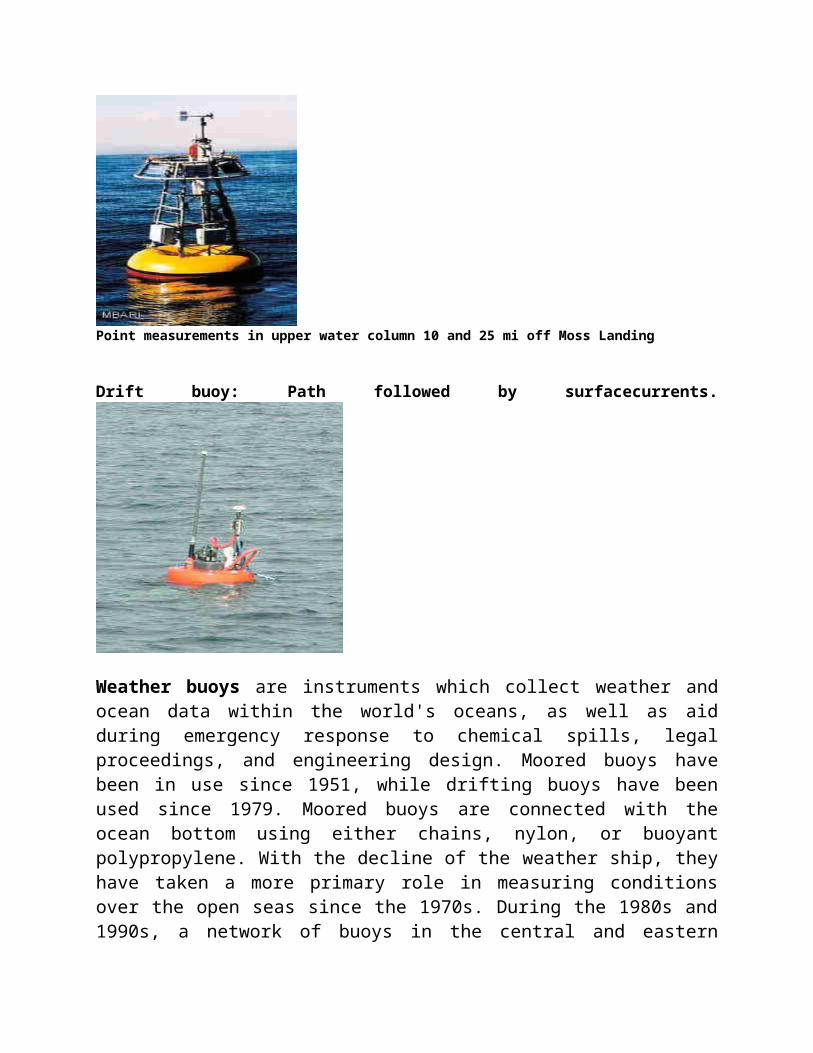
Drift buoy: Path followed by surfacecurrents.
Weather buoys are instruments which collect weather andocean data within the world's oceans, as well as aidduring emergency response to chemical spills, legalproceedings, and engineering design. Moored buoys havebeen in use since 1951, while drifting buoys have beenused since 1979. Moored buoys are connected with theocean bottom using either chains, nylon, or buoyantpolypropylene. With the decline of the weather ship, theyhave taken a more primary role in measuring conditionsover the open seas since the 1970s. During the 1980s and1990s, a network of buoys in the central and eastern
tropical Pacific ocean helped study the El Niño-SouthernOscillation. Moored weather buoys range from 1.5 metres(4.9 ft) to 12 metres (39 ft) in diameter, while driftingbuoys are smaller, with diameters of 30 centimetres(12 in) to 40 centimetres (16 in). Drifting buoys are thedominant form of weather buoy in sheer number, with 1250located worldwide. Wind data from buoys has smaller errorthan that from ships.
Conclusions And Future Challenges
Applications drive the development of underwater sensingand networking. Inexpensive computing, sensing andcommunications have enabled terrestrial sensor networkingin the past couple of decades; we expect that cheapcomputing, combined with lower cost advanced acoustictechnology, communication and sensing, will enableunderwater sensing applications as well.While research onunderwater senso rnetworks has significantly advanced inrecent years, it is clear that a number of challengesstill remain to be solved.With the flurry of newapproaches to communication, medium access, networkingand applications, effective analysis, integration andtesting of these ideas is paramount—the field mustdevelop fundamental insights, as well as understand whatstands up in practice. For these reasons, we believe thatthe development of new theoretical models (bothanalytical and computational) is very much needed, andthat greater use of testbeds and field experiments isessential; such work will support more accurateperformance analysis and system characterization, whichwill feed into the next generation of underwatercommunications and sensing. In addition, integration and
testing of current ideas will stress the seams that areoften hidden in more focused laboratory research, such astotal system cost,energy requirements and overallrobustness in different conditions.In addition, we areencouraged by a broadening of the field to considerdifferent options, spanning from high-performance (andcost) to low-cost (but lower performance), and includingmobile (human-supported or autonomous),deployable andstationary configurations..
Copyright © 2022 FDOKUMEN




















