
KIAT SUKSES MENYUSUN PROPOSAL DAN KARYA TULIS ILMIAH PROGRAM KREATIVITAS MAHASISWA (PKM
USULAN PROGRAM KREATIVITAS MAHASISWA
SI PENYU , Sistem Pengelolaan Wilayah Kelautan berupa Kapal Tanpa Awak Semi Automatic yang dapat Mendeteksi Tumpahan Minyak dan Keberadaan ikan di Laut yang
Tercemar
BIDANG PROGRAM KREATIVITAS MAHASISWA KARSA CIPTA
(PKM-KC)
Disusun oleh:
Meuthia Fawzia (10/297563/PA/13019)
Firdhaus Azhar (09/281360/PA/12392)
Ary Kusuma Ningsih (10/305238/PA/13465) Kristiawan Devianto (12/334847/PA/15041)
Muhammad Nur Fattah (11/314422/DPA/03935)
UNIVERSITAS GADJAH MADA YOGYAKARTA
2012
ii
iii
DAFTAR ISI
HALAMAN JUDUL.................................................................................. i
HALAMAN PENGESAHAN.................................................................... ii
DAFTAR ISI ............................................................................................. iii
DAFTAR GAMBAR ................................................................................ iv A. LATAR BELAKANG MASALAH ........................................ 1
B. PERUMUSAN MASALAH ..................................................... 1 C. TUJUAN PROGRAM ............................................................ 2
D. LUARAN YANG DIHARAPKAN........................................... 2 E. KEGUNAAN PROGRAM ....................................................... 2
F. TINJAUAN PUSTAKA............................................................ 2 G. METODE YANG DILAKSANAKAN .................................... 4
H. JADWAL KEGIATAN PROGRAM ......................................... 7 I. RANCANGAN BIAYA ........................................................... 8
J. DAFTAR PUSTAKA ............................................................... 9 K. LAMPIRAN ............................................................................. 10

iv
DAFTAR GAMBAR
Gambar 1.1 Skema SI PENYU tampak atas ……………………… 5 Gambar 1.2 Skema kapal tampak samping ……………………….… 5
Gambar 1.3 Prinsip kerja teknologi sonar…………………………… 6 Gambar 2.1 Skema sistem Kapal otomatis tampak atas ……………. 12
Gambar 2.2 Skema sistem Kapal otomatis tampak samping ……… 13 Gambar 2.3 Skema rancangan penyedot minyak ………………… 14
Gambar 2.4 Diagram Alir Kapal “SI PENYU”……………………… 15

1
JUDUL PROGRAM “SI PENYU , Sistem Pengelolaan Wilayah Kelautan berupa Kapal Tanpa Awak Semi
Automatic yang dapat Mendeteksi Tumpahan Minyak dan Keberadaan ikan di Laut yang Tercemar”
A. LATAR BELAKANG MASALAH Wilayah Indonesia terdiri atas daratan dan kelautan dengan perbandingan luas
wilayah kelautan dan daratan adalah 3:1. Hampir 70% wilayah Indonesia di penuhi oleh wilayah kelautan. Wilayah kelautan Indonesia sendiri termasuk pada kawasan lalu lintas kelautan yang padat. Tak ayal banyak kapal-kapal yang beroperasi di sekitar wilayah kelautan Indonesia. Kapal-kapal pengangkut dari daerah manapun berlalu-lintas di kawasan ini. Karena sibuk dan padatnya lalu lintas perairan, kecelakaan kerja pasti terjadi dan laut pun yang menjadi korban . Salah satu contohnya yang terjadi di daerah wilayah Laut Timor Indonesia, sekitar 98 persen tumpahan minyak tersebut bercampur pula dengan zat timah hitam dan bubuk kimia beracun jenis Corexit 9500 yang mencemari kemudian mengendap di Laut Timor perairan Indonesia
Hasil uji laboratorium afiliasi departemen kimia Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Indonesia menunjukkan bahwa sekitar 38,15 persen wilayah perairan Indonesia di Laut Timor tercemar minyak mentah. “Sumber minyak mentah itu berasal dari sumur minyak Montara di Blok Atlas Barat Laut Timor yang meledak pada 20 Agustus 2009. Laboratorium tersebut menggunakan metode gravimetri, dan hasilnya menunjukkan bahwa tingkat pencemaran minyak yang ditemukan di perairan Indonesia itu mencapai sekitar 38,15 persen,” (Ferdi Tanoni, 209)
Dari penjelasan diatas, dapat disimpulkan bahwa diperlukan sarana transportasi yang aman, murah dan tepat guna sebagai solusi dari masalah tersebut. Maka kami yang saat ini sedang menekuni dan memperdalam ilmu Elektronika dan Instrumentasi berusaha untuk membuat suatu sistem yang dapat memecahkan masalah tersebut dengan membuat suatu alat yang dapat bekerja untuk mendeteksi pencemaran laut dan sekaligus mengetahui kehidupan perikanan dan perkembangan ikan di wilayah yang tercemar tersebut.
B. PERUMUSAN MASALAH Fokus masalah yang diteliti adalah bagaimana membuat sebuah sistem yang akan
membantu menyusuri wilayah perairan di wilayah Indonesia dengan misi mendeteksi tumpahan minyak serta untuk mengetahui keberadaan ikan di laut yang tercemar. Sistem tersebut harus memiliki tingkat keamanan yang tinggi dan bekerja dengan sistem kendali tanpa awak, namun dapat dikendalikan dari jarak jauh, hal tersebut perlu direncanakan sebagai upaya memperkecil resiko kecelakaan . Pada pengelolaan wilayah perikanan Indonesia, sistem yang bekerja mampu mengetahui wilayah perikanan, melakukan pemantauan perkembangan perikanan dan penjagaan terhadap penangkapan liar oleh nelayan maupun pihak militer. Sedangkan pendeteksian minyak bumi yang tumpah akibat kecelakaan kerja tetap masih menjadi sorotan utama dari kelebihan sistem, dimana dapat memberikan warning untuk selanjutnya bisa dilakukan tindakan siap siaga mengatasi masalah tersebut supaya tidak terjadi pencemaran air laut.
2
C. TUJUAN PROGRAM Tujuan dari Sistem Pengelolaan Wilayah Kelautan berupa Kapal Tanpa Awak Semi
Automatic ini adalah :
1. Menumbuhkembangkan kreatifitas dalam bidang rancang bangun kapal, perencanaan system penggerak, penggunaan sensor dan otomasi sistem navigasinya.
2. Mendorong kemandirian dan kesiapan menghadapi tantangan perkembangan teknologi baik yang bersifat regional maupun global.
3. Meningkatkan rasa persatuan, nasionalisme dan cinta kemaritiman. 4. Memberikan kesadaran pada masyarakat bahwa suatu teknologi canggih tidak selalu
membutuhkan biaya yang besar dalam penerapannya. 5. Berupaya untuk memperbaiki rancangan dan meningkatkan kinerja yang dapat diukur
melalui berbagai faktor seperti peningkatan kualitas produk yang diinginkan.
D. LUARAN YANG DIHARAPKAN Penerapan teknologi ini diharapkan dapat di pakai sebagai pemantauan wilayah
kelautan Indonesia, khususnya di wilayah lalu lintas perairan yang sering sekali terjadi tumpahan minyak dan juga memantau kondisi perikanan sehingga mengurangi dampak penangkapan ikan secara liar. Selain itu juga mengharapkan luaran berupa model desain, piranti lunak, perangkat keras dan paten dari rancangan sistem
E. KEGUNAAN PROGRAM Adapun manfaat dari penggunaan sistem ini yang akan diperoleh, antara lain sebagai
berikut: 1. Dapat melakukan pemantauan wilayah kelautan lebih mudah. 2. Dapat mengetahui wilayah yang kaya ikan tanpa harus menuju ke tempat tujuan serta
melakukan pemantauan perkembangbiakan dan penjagaan terhadap penangkapan liar. 3. Melakukan penanggulangan dini terhadap masalah minyak bumi yang tumpah. 3. Masyarakat akan lebih menyadari bahwa teknologi canggih tidak hanya di dominasi dan
dinikmati oleh masyarakat di negara-negara maju saja. F. TINJAUAN PUSTAKA
Kapal, adalah kendaraan pengangkut penumpang dan barang di laut (sungai dsb) seperti halnya sampan atau perahu yang lebih kecil. Kapal biasanya cukup besar untuk membawa perahu kecil seperti sekoci. Sedangkan dalam istilah inggris, dipisahkan antara kapal yang lebih besar dan boat yang lebih kecil. Secara kebiasaannya kapal dapat membawa perahu tetapi perahu tidak dapat membawa kapal. Ukuran sebenarnya dimana sebuah perahu disebut kapal selalu ditetapkan oleh undang-undang dan peraturan atau kebiasaan setempat.
Berabad-abad kapal digunakan oleh manusia untuk mengarungi sungai atau lautan yang diawali oleh penemuan perahu. Biasanya manusia pada masa lampau menggunakan kano, rakit ataupun perahu, semakin besar kebutuhan akan daya muat maka dibuatlah perahu atau rakit yang berukuran lebih besar yang dinamakan kapal. Bahan-bahan yang digunakan untuk pembuatan kapal pada masa lampau menggunakan kayu, bambu ataupun batang-batang papirus seperti yang digunakan bangsa mesir kuno kemudian
3
digunakan bahan bahan logam seperti besi/baja karena kebutuhan manusia akan kapal yang kuat. Untuk penggeraknya manusia pada awalnya menggunakan dayung kemudian angin dengan bantuan layar, mesin uap setelah muncul revolusi Industri dan mesin diesel serta Nuklir. Beberapa penelitian memunculkan kapal bermesin yang berjalan mengambang di atas air seperti Hovercraft dan Eakroplane. Serta kapal yang digunakan di dasar lautan yakni kapal selam.
Untuk menentukan arah, pada masa lalu kapal berlayar tidak jauh dari benua atau daratan. Namun sesuai dengan perkembangan akhirnya para awak kapal menggunakan bintang sebagai alat bantu navigasi dengan alat bantu berupa kompas dan astrolabe serta peta. Ditemukannya jam pasir oleh orang-orang Arab juga ikut membantu navigasi ditambah dengan penemuanjam oleh John Harrison pada abad ke-17. Penemuan telegraf oleh S.F.B Morsedan radio oleh C. Marconi, terlebih lebih penggunaan radar dan sonar yang ditemukan pada abad ke 20 membuat peranan navigator agak tergeser. Satuan kecepatan kapal dihitung dengan knot dimana 1 knot = 1,85200 km/jam.
Menjelang akhir abad ke-20, navigasi sangat dipermudah oleh GPS, yang memiliki ketelitian sangat tinggi dengan bantuan satelit.Selain dari itu system komunikasi yang sangat modern juga menunjang navigasi dengan adanya beberapa macam peralatan seperti radar type Harpa memungkinkan para navigator / Mualim bisa melihat langsung keadaan kondisi laut. Radar harpa ini adalah radar modern yang bisa mendeteksi langsung jarak antara kapal dgn kapal, kapal dengan daratan , kapal dengan daerah berbahaya, kecepatan kapal, kecepatan angin,dan mempunyai daya akurasi gambar yang jelas. Selain dari itu ada lagi system GMDSS (Global Maritime Distress safety system) Suatu system keselamatan pelayaran secara global. Kalau suatu kapal berada dalam kondisi berbahaya system ini akan memancarkan berita bahaya yang berisi posisi kapal, nama kapal, jenis marabahaya,tersebut secara otomatis, cepat, tepat , akurat. Untuk system komunikasi lainnya ada INMARSAT (International Maritime satelite) Suatu system pengiriman berita menggunakan E-Mail, Telephone, Telex, ataupun Faximile.
Sistem penginderaaan jarak jauh di wilayah perairan dapat dengan menggunakan dengan pemotretan melalui satelit. Pemotretan melalui satelit tak langsung mencerna informasi dengan real-time, mengambil sample dari beberapa wilayah dan kemudian akhirnya digabungkan menjadi satu.
Untuk keperluan itu dibuat kapal yang dapat dikendalikan secara manual dan dapat di setting secara autonomous. Kapal ini dilengkapi dengan kamera Sony ccd 1/3” dan untuk navigasi jalur yang akan dilewati oleh kapal digunakan modul Parallax GPS dengan spesifikasi sebagai berikut
1. Supply Voltage 3.3- 5V. 2. Akurasi hingga 2 meter, 3. Waktu akuisisi : 45 (cold start) / 38 (warm start) / 8 (hot start) / 0,1 (reaquisition)
detik 4. Mendukung format pemetaan (map datum) WGS-84. 5. Antarmuka modul GPS ini adalah serial TTL dan RAW data 6. Protokol output NMEA0183V2.2GGA, GSV, GSA, RMC, (optional VTG, GLL). 7. Built-in patch antena Dari spesifikasi yang ada terlihat bahwa akurasi GPS 2 meter dan waktu reaquisition 0,1
detik ini memungkinkan kapal dapat melewati jalur yang sudah dipetakan dalam program mikrokontroler dengan tepat.

4
Selanjutnya pemakaian GPS diatas menghasilkan keluaran data digital yang akan berfungsi sebagai input pada mikrokontroler. Kemudian data dari GPS ini akan diolah dengan algoritma program yang tertanam di dalam mikrokontroler untuk selanjutnya digunakan sebagai navigator kapal dengan cara memberikan sinyal masukan pada driver motor.
Mikrokontroler yang akan digunakan adalah Mikrokontroler MBED LPC1768 dengan feature seperti berikut :
Core ARM Cortex-M3
Memiliki frekuensi 96MHz
Memiliki memori flash 512KB
Memiliki memori RAM 32KB
Mendukung fitur-fitur seperti: SPI, I2C, CAN, AnalogIn, PwmOut, AnalogOut Sebagai pemantauan kadar minyak di peraran Indonesia dan juga untuk memantau
kondisi perikanan yang dilalui oleh si kapal, dilengkapai dengan sensor sonar. Sonar teknologi didasarkan pada gelombang suara. Sistem ini menggunakan sonar untuk mencari dan menentukan struktur, komposisi, serta kedalaman langsung di bawah transduser hingga cakupan 45 derajat. transduser mengirim sinyal gelombang suara dan menentukan jarak dengan mengukur waktu antara transmisi gelombang suara dan ketika gelombang suara terpantul obyek. Ia kemudian menggunakan sinyal tercermin untuk menafsirkan lokasi, ukuran, dan komposisi objek.
G. METODE PELAKSANAAN PROGRAM Upaya penerapan teknologi kapal tanpa awak semi otomatis ini melalui beberapa tahap,
yakni: 1. Studi Literatur
Langkah pertama dalam merancang sistem ini adalah dengan mengumpulkan data-data berupa artikel-artikel yang berkaitan dengan perancangan sistem rancang bangun kapal, sistem penggerak dan navigasi serta otomasi sensor yang dapat diperoleh di jurnal-jurnal ilmiah melalui internet. Kemudian melakukan survey ke lapangan untuk mengetahui keadaan yang sebenarnya di lapangan, sehingga dapat diketahui hal apa saja yang menjadi kendala bagi wilayah perairan maupun kelautan. Berdasarkan hasil survey yang dilakukan di lapangan, kesulitan paling utama adalah penggunaan alat pada saat sistem dikendalikan aoutonomous, kalibrasi alat pendeteksi ikan dengan keadaan di wilayah kelautan dan penerapan penggunaan alat pada penanggulangan minyak yang tumpah.
Langkah berikutnya adalah mewawancari para ahli terutama dalam bidang yang berkaitan dengan sistem kendali otomatis,ahli sonar, dan para ahli lain seperti ahli dalam bidang Digital Signal Processing serta ahli dalam bahasa pemrograman dan bahasa mesin. Dengan demikian dapat diketahui prinsip kerja serta kelebihan dan kelemahan dari teknologi yang digunakan dalam sistem ini. Para ahli yang kami wawancarai memberi saran dalam pembuatan sistem ini secara keseluruhan. Pertanyaannya seberapa peka alat dapat mendeteksi obyek yang akan diteliti. Hal itu merupakan kerja sensor sonar yang teruji seberapa kepekaan yang dimiliki sensor tesebut untuk mengirim gelombang dan menerimanya kembali, dalam penggunaan alat akan disesuaikan dan dikembangkan secara maksimal agar alat mempunyai tingkat kepekaan yang tinggi.
5
2. Perancangan sistem
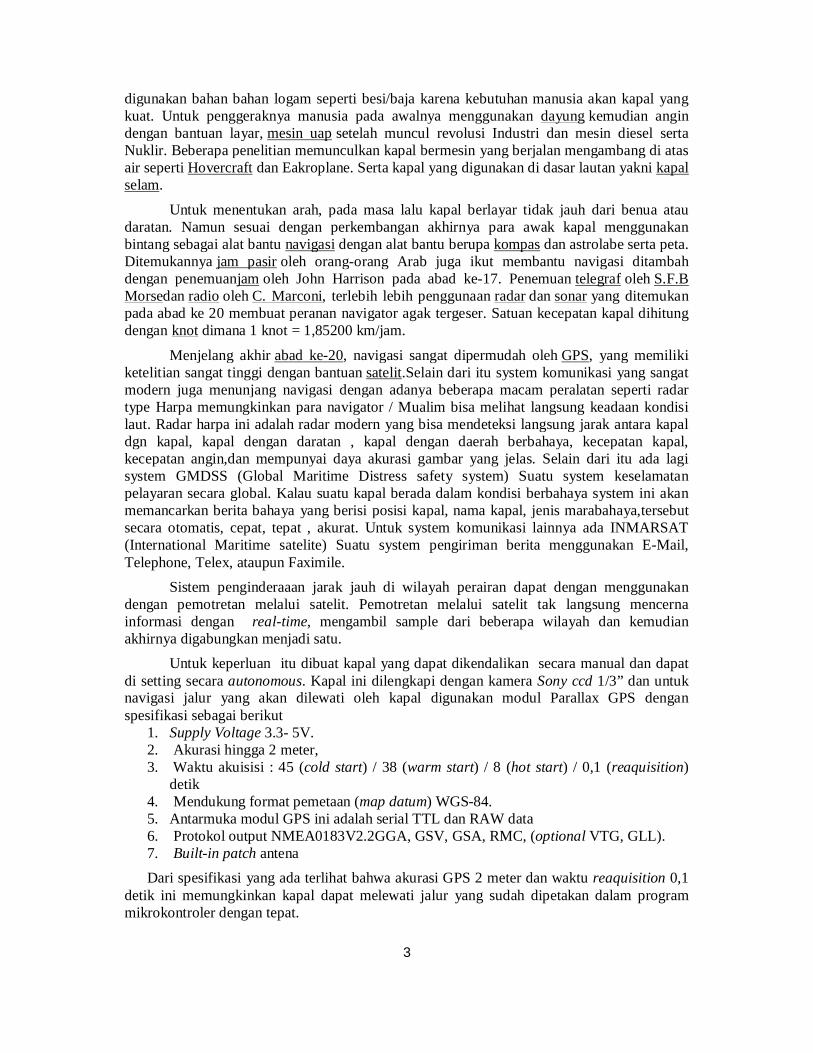
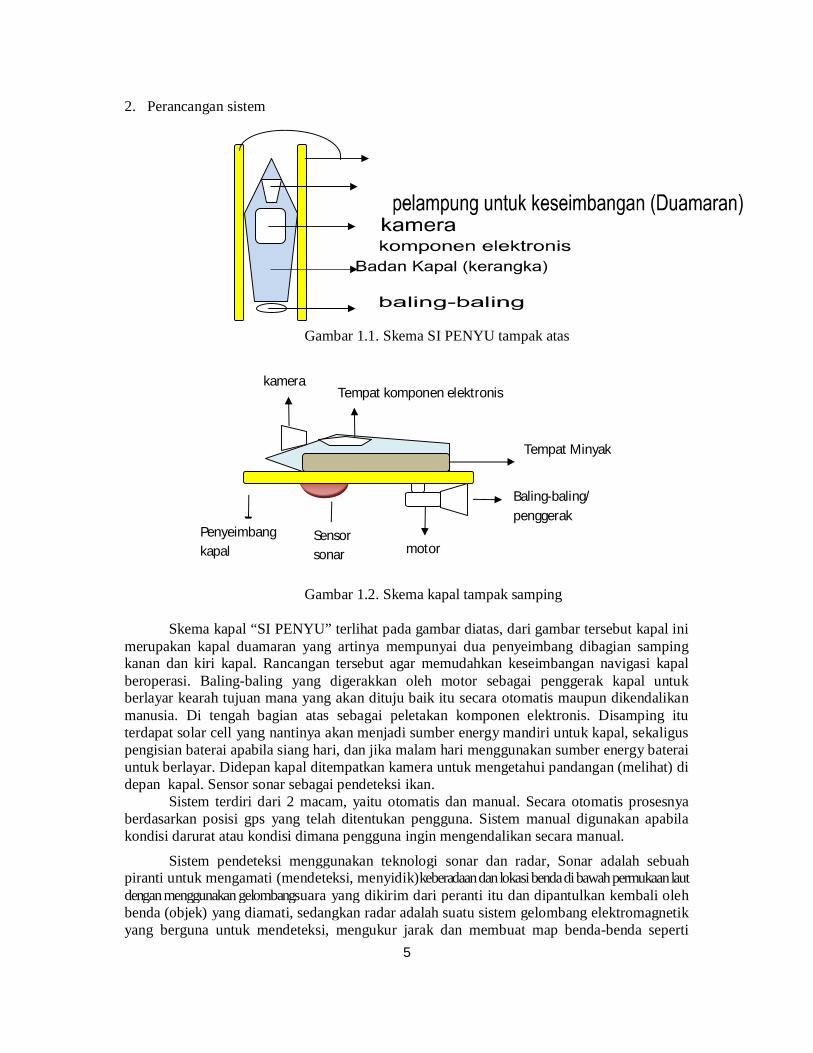
Gambar 1.1. Skema SI PENYU tampak atas Gambar 1.2. Skema kapal tampak samping
Skema kapal “SI PENYU” terlihat pada gambar diatas, dari gambar tersebut kapal ini
merupakan kapal duamaran yang artinya mempunyai dua penyeimbang dibagian samping kanan dan kiri kapal. Rancangan tersebut agar memudahkan keseimbangan navigasi kapal beroperasi. Baling-baling yang digerakkan oleh motor sebagai penggerak kapal untuk berlayar kearah tujuan mana yang akan dituju baik itu secara otomatis maupun dikendalikan manusia. Di tengah bagian atas sebagai peletakan komponen elektronis. Disamping itu terdapat solar cell yang nantinya akan menjadi sumber energy mandiri untuk kapal, sekaligus pengisian baterai apabila siang hari, dan jika malam hari menggunakan sumber energy baterai untuk berlayar. Didepan kapal ditempatkan kamera untuk mengetahui pandangan (melihat) di depan kapal. Sensor sonar sebagai pendeteksi ikan.
Sistem terdiri dari 2 macam, yaitu otomatis dan manual. Secara otomatis prosesnya berdasarkan posisi gps yang telah ditentukan pengguna. Sistem manual digunakan apabila kondisi darurat atau kondisi dimana pengguna ingin mengendalikan secara manual.
Sistem pendeteksi menggunakan teknologi sonar dan radar, Sonar adalah sebuah piranti untuk mengamati (mendeteksi, menyidik)keberadaan dan lokasi benda di bawah permukaan laut dengan menggunakan gelombangsuara yang dikirim dari peranti itu dan dipantulkan kembali oleh benda (objek) yang diamati, sedangkan radar adalah suatu sistem gelombang elektromagnetik yang berguna untuk mendeteksi, mengukur jarak dan membuat map benda-benda seperti
Sensor sonar
Baling-baling/ penggerak
Tempat Minyak
motor
kamera Tempat komponen elektronis
Penyeimbang kapal
6
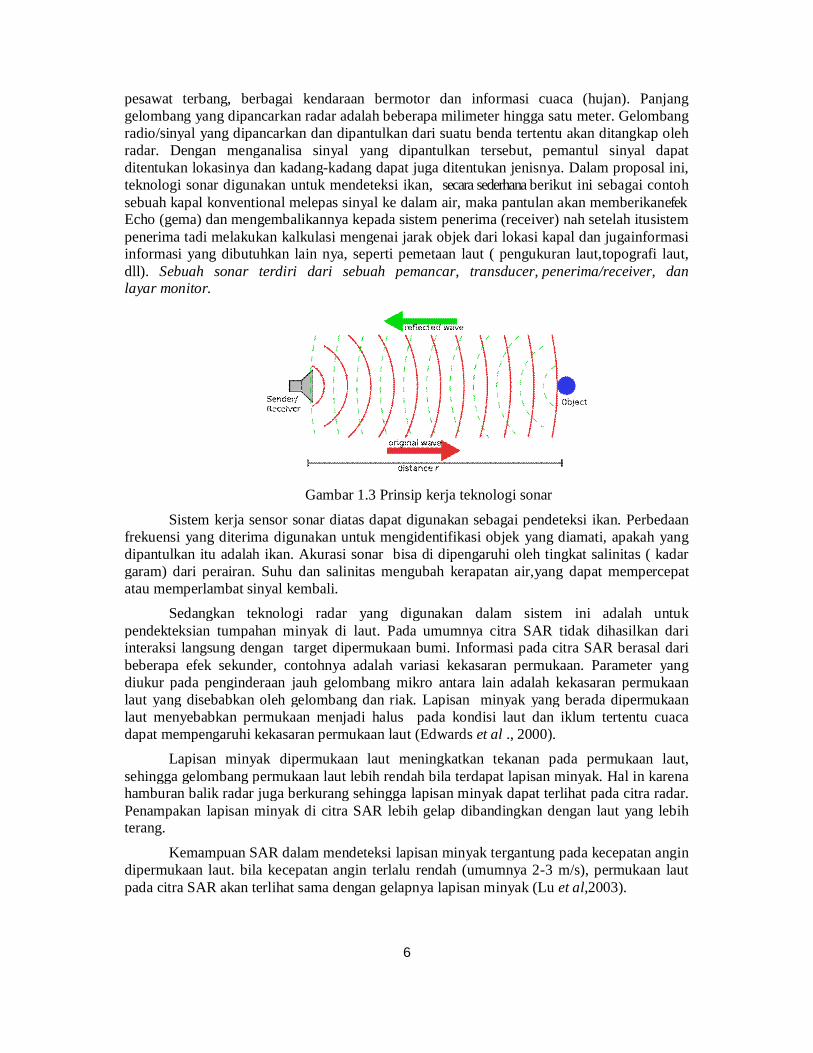
pesawat terbang, berbagai kendaraan bermotor dan informasi cuaca (hujan). Panjang gelombang yang dipancarkan radar adalah beberapa milimeter hingga satu meter. Gelombang radio/sinyal yang dipancarkan dan dipantulkan dari suatu benda tertentu akan ditangkap oleh radar. Dengan menganalisa sinyal yang dipantulkan tersebut, pemantul sinyal dapat ditentukan lokasinya dan kadang-kadang dapat juga ditentukan jenisnya. Dalam proposal ini, teknologi sonar digunakan untuk mendeteksi ikan, secara sederhana berikut ini sebagai contoh sebuah kapal konventional melepas sinyal ke dalam air, maka pantulan akan memberikanefek Echo (gema) dan mengembalikannya kepada sistem penerima (receiver) nah setelah itusistem penerima tadi melakukan kalkulasi mengenai jarak objek dari lokasi kapal dan jugainformasi informasi yang dibutuhkan lain nya, seperti pemetaan laut ( pengukuran laut,topografi laut, dll). Sebuah sonar terdiri dari sebuah pemancar, transducer, penerima/receiver, dan layar monitor.
Gambar 1.3 Prinsip kerja teknologi sonar
Sistem kerja sensor sonar diatas dapat digunakan sebagai pendeteksi ikan. Perbedaan frekuensi yang diterima digunakan untuk mengidentifikasi objek yang diamati, apakah yang dipantulkan itu adalah ikan. Akurasi sonar bisa di dipengaruhi oleh tingkat salinitas ( kadar garam) dari perairan. Suhu dan salinitas mengubah kerapatan air,yang dapat mempercepat atau memperlambat sinyal kembali.
Sedangkan teknologi radar yang digunakan dalam sistem ini adalah untuk pendekteksian tumpahan minyak di laut. Pada umumnya citra SAR tidak dihasilkan dari interaksi langsung dengan target dipermukaan bumi. Informasi pada citra SAR berasal dari beberapa efek sekunder, contohnya adalah variasi kekasaran permukaan. Parameter yang diukur pada penginderaan jauh gelombang mikro antara lain adalah kekasaran permukaan laut yang disebabkan oleh gelombang dan riak. Lapisan minyak yang berada dipermukaan laut menyebabkan permukaan menjadi halus pada kondisi laut dan iklum tertentu cuaca dapat mempengaruhi kekasaran permukaan laut (Edwards et al ., 2000).
Lapisan minyak dipermukaan laut meningkatkan tekanan pada permukaan laut, sehingga gelombang permukaan laut lebih rendah bila terdapat lapisan minyak. Hal in karena hamburan balik radar juga berkurang sehingga lapisan minyak dapat terlihat pada citra radar. Penampakan lapisan minyak di citra SAR lebih gelap dibandingkan dengan laut yang lebih terang.
Kemampuan SAR dalam mendeteksi lapisan minyak tergantung pada kecepatan angin dipermukaan laut. bila kecepatan angin terlalu rendah (umumnya 2-3 m/s), permukaan laut pada citra SAR akan terlihat sama dengan gelapnya lapisan minyak (Lu et al,2003).
7
3. Implementasi Sistem SI PENYU ini dapat digunakan untuk mengetahui perairan mana yang banyak
ikannya serta mendeteksi tumpahan minyak . Untuk sistem pendeteksi ini menggunakan sensor sonar yang dapat mengirim dan menangkap sinyal dari obyek yang diamati, kemudian diproses dalam sistem minimum untuk mengkaji obyek apa yang didapat kemudian menginformasikan ke ground station dan hasil data yang didapat dan telah diproses akan ditampilkan oleh display.
Sistem SI PENYU semi otomatis ini artinya dapat dikendalikan secara otomatis maupun manual sistem. Jika sistem bekerja secara otomatis, maka SI PENYU akan bergerak melalui way point dari koordinat yang telah dikehendaki oleh pengguna. Selain otomatis, alat ini juga dapat bekerja secara manual yang dikendalikan oleh remote controller dari ground station.
4. Evaluasi sistem
Setelah proses implementasi dan sistem telah diujicobakan maka tahap selanjutnya adalah mengevaluasi sistem secara keseluruhan. Evaluasi tersebut dilakukan untuk menyimpulkan dari hasil dan data yang didapat setelah dilakukan percobaan di lapangan.Dari kegiatan evaluasi ini diharapkan segala kekurangan dari sistem dapat diperbaiki sehingga dapat bermanfaat dengan sempurna bagi penggunanya.
H. JADWAL KEGIATAN PROGRAM
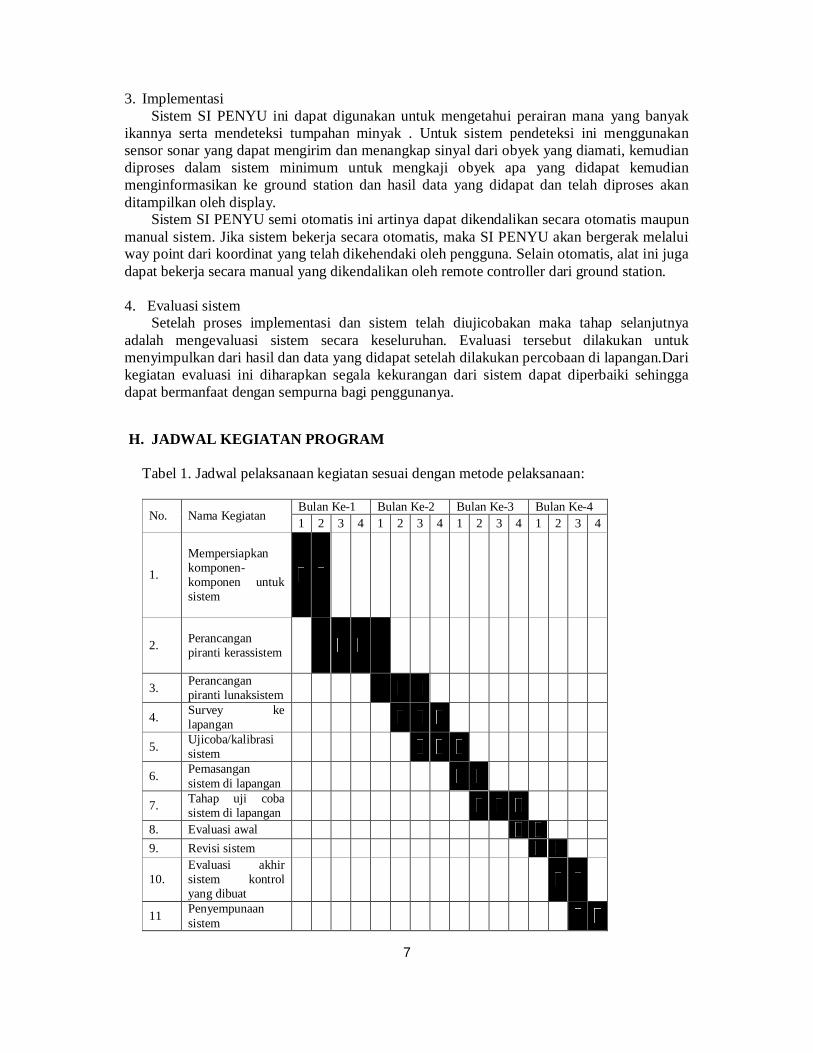
Tabel 1. Jadwal pelaksanaan kegiatan sesuai dengan metode pelaksanaan:
No. Nama Kegiatan Bulan Ke-1 Bulan Ke-2 Bulan Ke-3 Bulan Ke-4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4
1.
Mempersiapkan komponen-komponen untuk sistem
2. Perancangan piranti kerassistem
3. Perancangan piranti lunaksistem
4. Survey ke lapangan
5. Ujicoba/kalibrasi sistem
6. Pemasangan sistem di lapangan
7. Tahap uji coba sistem di lapangan
8. Evaluasi awal 9. Revisi sistem
10. Evaluasi akhir sistem kontrol yang dibuat
11 Penyempunaan sistem

8
I. RANCANGAN BIAYA
- Kerangka Kapal Rp 600.000, 00 - Solar Cell 5 watt Rp 500.000,00 - Layar Rp 50.000,00 - Mikrokontroller ATMEGA 128 3buah @ Rp 150. 000, 00 Rp 450. 000,00 - Baterai Nanotech 2C 7.2 Volt Rp 150.000,00 - Motor Servo 4 buah @Rp 400.000,00 Rp 1.600.000,00 - Brushless Inrunner Motor 3 buah @Rp 250.000,00 Rp 750.000,00 - Minimum System 2 buah @Rp 80.000,00 Rp 160.000,00 - ARM mbed nxp lpc 1768 Rp 950. 000, 00 - KameraSony ccd 1/3” Rp 700.000,00 - GPS Receiver LR9540 Rp 980.000,00 - Sensor Sonar Rp 750.000,00 - Remote Controller Rp 500.000,00 - Xbee 2 buah @Rp 500.000 Rp 1.000.000,00 - Komponen elektronik pendukung Rp 200. 000, 00 - Downloader USB Rp 300. 000, 00 - Software pendukung pembuatan sistem Rp 100. 000, 00 - Kesekretariatan Rp 100. 000, 00 - Transportasi Rp 100. 000, 00 Jumlah
Rp 10.405.000,00

9
I. DAFTAR PUSTAKA Anonim. 2011. Contoh Artikel Ilmu Bangunan Kapal. Tersedia di :
http://911medical.blogspot.com/2010/11/contoh-artikel-ilmu-bangunan-kapal.html. Diakses tanggal 11 Oktober 2012
Anonim. 2011. Remote Control. Tersedia di : http://www.electronicglobal.com/2011/09/remote-control.html. Diakses pada 11 oktober 2012.
Anonim. 2011. Kamera dan Video Sender. Tersedia di : http://tronika.indonetwork.co.id/561301/2-4ghz-audio-video-sender-2-w.htm , diakses pada 11 Oktober 2012.
Anonim.. 2012. Sonar dan Radar. Tersedia di : http://wartawarga.gunadarma.ac.id/2012/06/sonar-dan-radar-2/, diakses pada 12 Oktober 2012.
Digitallaboratory’s blog. 2011. “Sensor sonar”. Tersedia di : http://digitallaboratory.wordpress.com/ Diakses tanggal 7 Oktober 2011
Digitallaboratory’s blog. 2011. “macam-macam sensor”. Tersedia di : http://digitallaboratory.wordpress.com/2010/01/21/macam-macam-sensor/#comment-69, Diakses tanggal 7 Oktober 2011
Eko Putro, Agfianto,2002,Belajar Mikrokontroler AT89C51/52/55 Teori dan Aplikasi, Yogyakarta: Gava Media.
Hutama, Isro. 2011. Kendali Pendulum Terbalik Dinamis. Tugas Akhir S1. Jurusan Teknik Elektro, Fakultas Teknik, UGM. Yogyakarta.
Korkmaz, S. 2007. PID Controllers. Unpublished Journal. Ankara Poonsawat, S. 2008. Speed Regulation of a Small BLDC Motorusing Genetic- Based Proportional Control. Suranaree University of Technology. Thailand.
10
K. LAMPIRAN
LAMPIRAN 1. 1) DAFTAR RIWAYAT HIDUP KETUA DAN ANGGOTA PELAKSANA Biodata (Riwayat Hidup)
a) Ketua Pelaksana Nama Lengkap : Meuthia Fawzia Nama Panggilan : Meuthia NIM : 10/297563/PA/13019 Prodi / Fakultas : Elektronika & Instrumentasi / MIPA
(Meuthia Fawzia) b) Anggota Pelaksana 1
Nama Lengkap : Firdhaus Azhar Nama Panggilan : Firdhaus NIM : 09/281360/PA/12392 Prodi / Fakultas : Elektronika & Instrumentasi / MIPA
(Firdhaus Azhar)
c) Anggota Pelaksana 2
Nama Lengkap : Ary Kusuma Ningsih Nama Panggilan : Ary NIM : 10/305238/PA/13465 Prodi / Fakultas : Elektronika & Instrumentasi / MIPA
(Ary Kusuma Ningsih)
d) Anggota Pelaksana 3 Nama Lengkap : Kristiawan Devianto Nama Panggilan : Fian NIM : 12/334847/PA/15041 Prodi / Fakultas : Elektronika & Instrumentasi / MIPA
( Kristiawan Devianto) a) Anggota Pelaksana 4
Nama Lengkap : Muhammad Nur Fattah Nama Panggilan : Fattah NIM : 11/314422/DPA/03935 Prodi / Fakultas : D3 Elektronika & Instrumentasi / Sekolah Vokasi
(Muhammad Nur Fattah)
11
2) NAMA DAN BIODATA DOSEN PEMBIMBING
a. Nama lengkap dan gelar : Drs. Bambang Nurcahyo Prastowo, M.Si b. Golongan Pangkat : Asisten Ahli/IIIB c. NIP : 196102111995091001 d. NIDN : 0011026105 e. Jabatan Fungsional : Asisten Ahli f. Fakultas/Program Studi : FMIPA /Elektronika Instrumentasi g. Perguruan Tinggi : UGM h. Bidang Keahlian : Basisdata, Jaringan Komputer, Keamanan
Jaringan Komputer, Pengembangan Aplikasi berbasis web
I. Waktu untuk kegiatan PKM : 8 jam/minggu
Yogyakarta, 10 Oktober 2012
Dosen Pendamping
12
LAMPIRAN 2.
3) GAMBARAN TEKNOLOGI YANG AKAN DITERAPKEMBANGKAN
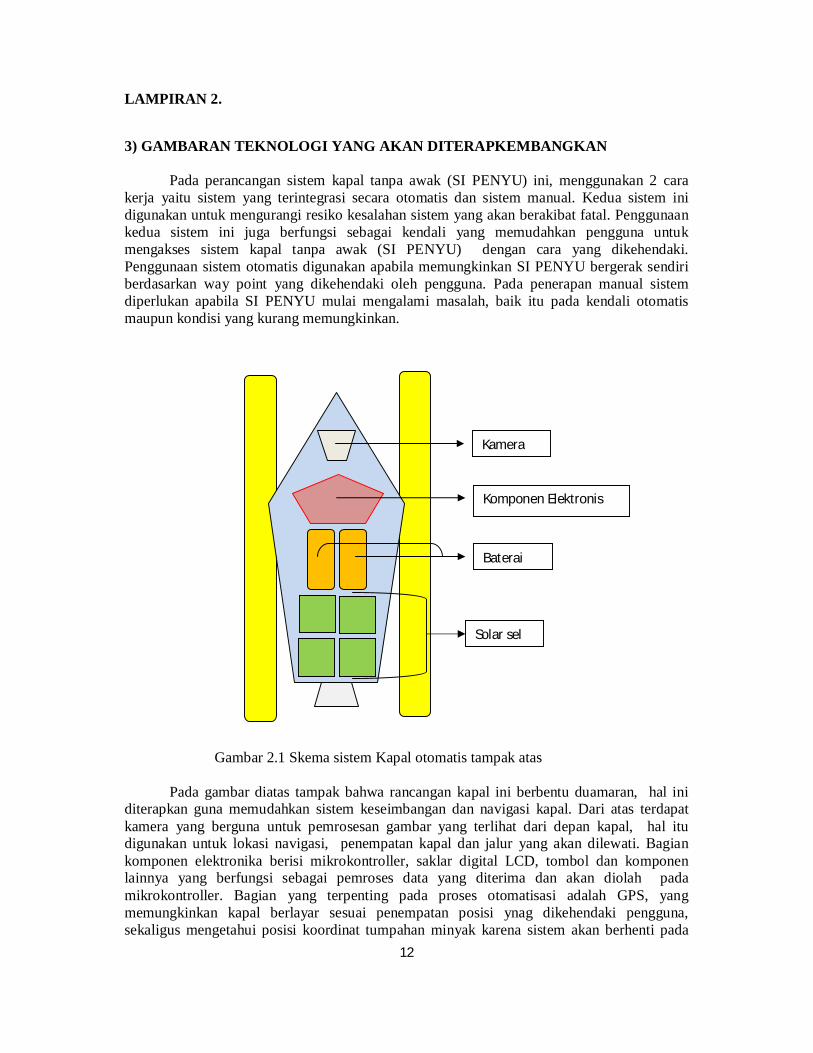
Pada perancangan sistem kapal tanpa awak (SI PENYU) ini, menggunakan 2 cara kerja yaitu sistem yang terintegrasi secara otomatis dan sistem manual. Kedua sistem ini digunakan untuk mengurangi resiko kesalahan sistem yang akan berakibat fatal. Penggunaan kedua sistem ini juga berfungsi sebagai kendali yang memudahkan pengguna untuk mengakses sistem kapal tanpa awak (SI PENYU) dengan cara yang dikehendaki. Penggunaan sistem otomatis digunakan apabila memungkinkan SI PENYU bergerak sendiri berdasarkan way point yang dikehendaki oleh pengguna. Pada penerapan manual sistem diperlukan apabila SI PENYU mulai mengalami masalah, baik itu pada kendali otomatis maupun kondisi yang kurang memungkinkan.
Gambar 2.1 Skema sistem Kapal otomatis tampak atas Pada gambar diatas tampak bahwa rancangan kapal ini berbentu duamaran, hal ini diterapkan guna memudahkan sistem keseimbangan dan navigasi kapal. Dari atas terdapat kamera yang berguna untuk pemrosesan gambar yang terlihat dari depan kapal, hal itu digunakan untuk lokasi navigasi, penempatan kapal dan jalur yang akan dilewati. Bagian komponen elektronika berisi mikrokontroller, saklar digital LCD, tombol dan komponen lainnya yang berfungsi sebagai pemroses data yang diterima dan akan diolah pada mikrokontroller. Bagian yang terpenting pada proses otomatisasi adalah GPS, yang memungkinkan kapal berlayar sesuai penempatan posisi ynag dikehendaki pengguna, sekaligus mengetahui posisi koordinat tumpahan minyak karena sistem akan berhenti pada
Kamera
Komponen Elektronis
Baterai
Solar sel
13
saat sensor mendeteksi tumpahan minyak dan memberikan informasi dan instruksi untuk menyalakan alarm supaya pengguna mengetahui dan melakukan eksekusi pada tumpahan minyak tersebut. Pada bagian selanjutnya adalah baterai sebagai energi cadangan saat dibutuhkan, kemudian terdapat solar sel sebagai energi listrik mandiri. Penggunaan solar sel ini sebagai energi penggerak disiang hari atau pada saat menerima cahaya matahari.
Kontrol utama dalam sistem navigasi kapal ini adalah pengontrol PID (PID Controller), oleh sebab itu diperlukan rancangan kontrol PID dan nilai konstanta yang tepat agar sistem dapat bekerja dengan baik. Rancangan software meliputi pengaturan mode gerak dari motor kapal dan sinkronisasi hasil perhitungan pengontrol PID ke Electronic Speed Controller sehingga didapatkan luaran kecepatan motor brushless yang tepat.
Pada bagian sistem darurat juga ditambahkan kontrol manual dimana kapal akan mendapatkan perintah untuk melakukan mode gerak dari pengguna atau user melalui komunikasi wireless. Rancangan software meliputi pengaturan mode gerak dari kapal dengan menggunakan komunikasi serial secara wireless berbasis radio frequency. Pada kapal dipasang kamera yang dilengkapi dengan video sender yang berfungsi untuk mengambil data video dari area yang dilalui kapal dan mengirimkannya ke receiver pengguna.
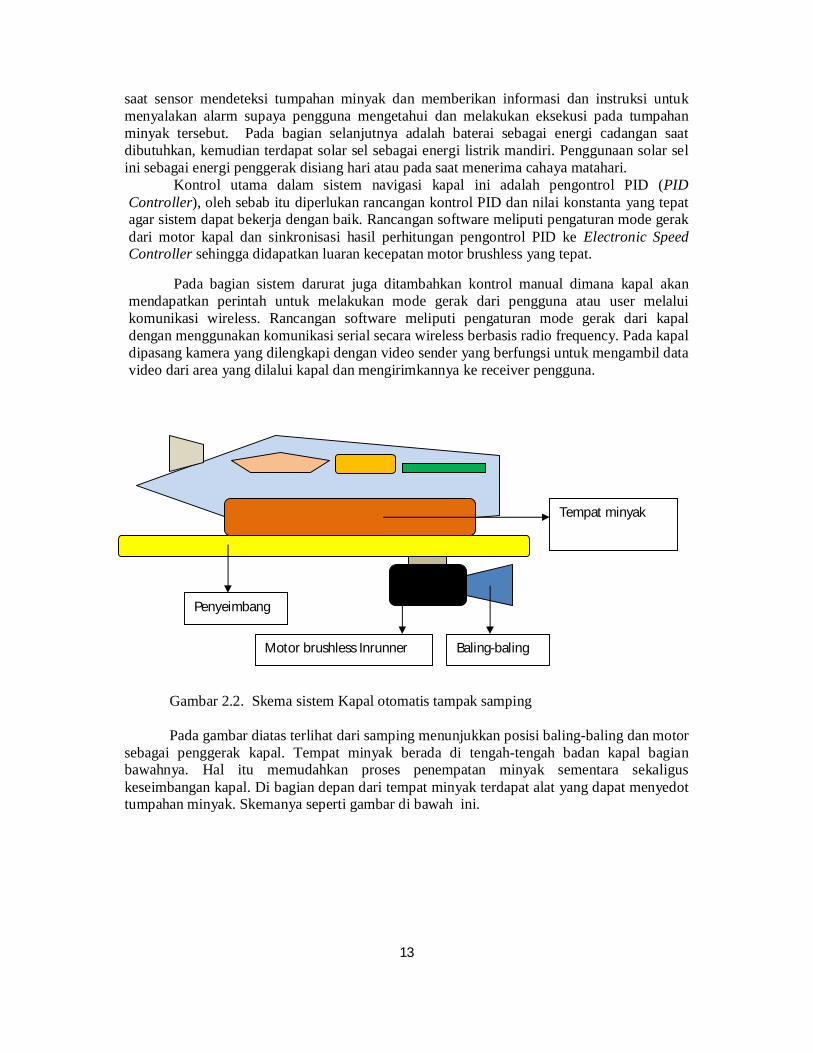
Gambar 2.2. Skema sistem Kapal otomatis tampak samping Pada gambar diatas terlihat dari samping menunjukkan posisi baling-baling dan motor sebagai penggerak kapal. Tempat minyak berada di tengah-tengah badan kapal bagian bawahnya. Hal itu memudahkan proses penempatan minyak sementara sekaligus keseimbangan kapal. Di bagian depan dari tempat minyak terdapat alat yang dapat menyedot tumpahan minyak. Skemanya seperti gambar di bawah ini.
Tempat minyak
Baling-baling Motor brushless Inrunner
Penyeimbang
14
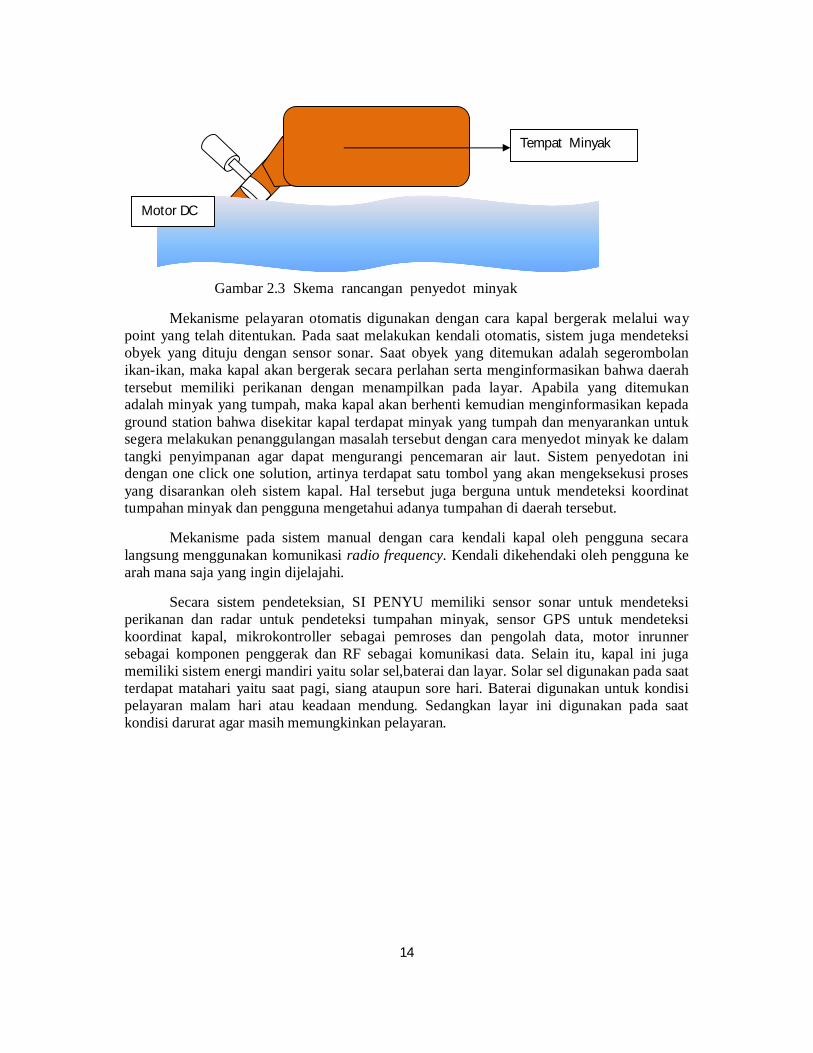
Gambar 2.3 Skema rancangan penyedot minyak
Mekanisme pelayaran otomatis digunakan dengan cara kapal bergerak melalui way point yang telah ditentukan. Pada saat melakukan kendali otomatis, sistem juga mendeteksi obyek yang dituju dengan sensor sonar. Saat obyek yang ditemukan adalah segerombolan ikan-ikan, maka kapal akan bergerak secara perlahan serta menginformasikan bahwa daerah tersebut memiliki perikanan dengan menampilkan pada layar. Apabila yang ditemukan adalah minyak yang tumpah, maka kapal akan berhenti kemudian menginformasikan kepada ground station bahwa disekitar kapal terdapat minyak yang tumpah dan menyarankan untuk segera melakukan penanggulangan masalah tersebut dengan cara menyedot minyak ke dalam tangki penyimpanan agar dapat mengurangi pencemaran air laut. Sistem penyedotan ini dengan one click one solution, artinya terdapat satu tombol yang akan mengeksekusi proses yang disarankan oleh sistem kapal. Hal tersebut juga berguna untuk mendeteksi koordinat tumpahan minyak dan pengguna mengetahui adanya tumpahan di daerah tersebut.
Mekanisme pada sistem manual dengan cara kendali kapal oleh pengguna secara langsung menggunakan komunikasi radio frequency. Kendali dikehendaki oleh pengguna ke arah mana saja yang ingin dijelajahi.
Secara sistem pendeteksian, SI PENYU memiliki sensor sonar untuk mendeteksi perikanan dan radar untuk pendeteksi tumpahan minyak, sensor GPS untuk mendeteksi koordinat kapal, mikrokontroller sebagai pemroses dan pengolah data, motor inrunner sebagai komponen penggerak dan RF sebagai komunikasi data. Selain itu, kapal ini juga memiliki sistem energi mandiri yaitu solar sel,baterai dan layar. Solar sel digunakan pada saat terdapat matahari yaitu saat pagi, siang ataupun sore hari. Baterai digunakan untuk kondisi pelayaran malam hari atau keadaan mendung. Sedangkan layar ini digunakan pada saat kondisi darurat agar masih memungkinkan pelayaran.
Tempat Minyak
Motor DC
15
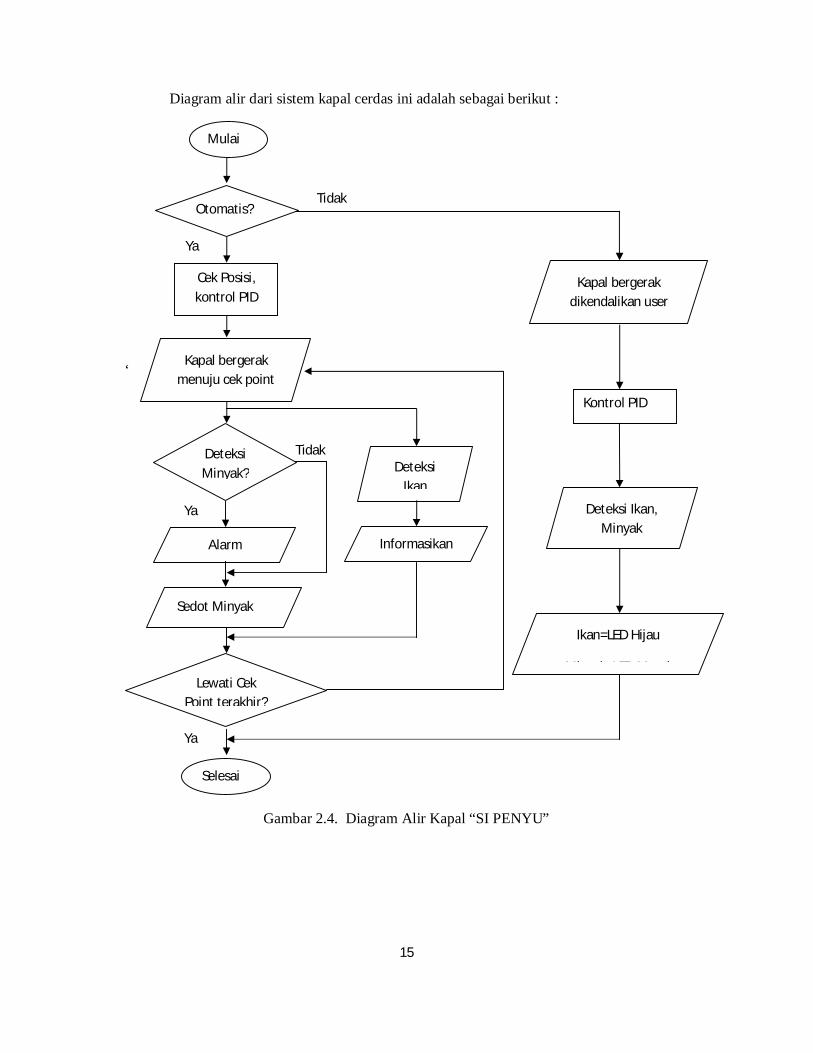
Diagram alir dari sistem kapal cerdas ini adalah sebagai berikut :
‘
Gambar 2.4. Diagram Alir Kapal “SI PENYU”
Mulai
Cek Posisi, kontrol PID
Otomatis?
Ya
Tidak
Deteksi Ikan
Informasikan
Selesai
Lewati Cek Point terakhir?
Ya
Tidak
Kapal bergerak menuju cek point
Sedot Minyak
Deteksi Minyak?
Ya
Alarm
Kapal bergerak dikendalikan user
Kontrol PID
Deteksi Ikan, Minyak
Ikan=LED Hijau
Minyak=LED Merah
Copyright © 2022 FDOKUMEN




















