
The least squares Padé method for model reduction
12
rNr. r. sysrBMs scl., 1992, vol,. 23, No. 10, 1559-1570 The least squares Pad6 method for moilel retluction LUIS ANTONIO AGUIRRET This work describes a novel method for the reduction of SISO continuous models. The proposed method, the least squares Pad6 (LS-Pad6) method, proddes reduced models which incorporate some infomration about the original model over the mid- frequency range. Consequently, the present method gives better results than the classical Pad6 and most of the related methods for a very small additional cost 1, Introduction The importance and relevance ofmodel order reduction can be verified from the huge number ofworks published regarding the subject (Genesio and Milanese 1976, Bultheel and Van Barel 1986). In spite of the significant number of methods avail- able, no approach always gives the best results. Almost all methods, however, aim at accurate reduced models for a low computational cost. In addition, it is desired to preserve the stability of the original model; i.e. given a stable high order model the reduced model should also be stable. A popular method for model reduction is the Pad6 method (Shamash 1975) which has recently been used to reduce the model of a real system (Papadopulos and Boglou 1990). This technique is simple, usually gives good results and it is not computationally demanding. A well-known drawback of this method, however, is that an unstable reduced model might arise from a stable model. Much effort has been made to overcome this difficulty (see Bultheel and Van Barel 1986 and refer- ences therein). A number of authors have tackled the problem of producing unstable reduced models in the following ways: (a) retaining the dominant poles of the original system in the reduced model (Shamash 1975); (b) determining the denominator of the reduced order model by techniques which guarantee stability: e.g. the Routh method (Hutton and Friedland l9?5) or the stability equation method (Chen et al. 1980), and then obtain- ing the numerator polynomial by the Pad6 method; (c) imposing constraints at frequencies other than at s:0 (Xiheng 1987, Stahl and Hippe 1988). Although the methods in (a)-(c) provide stable reduced models, some dificulties can be pointed out. (i) Which poles are really dominant is not always evident and all the poles of the original model must be determined in advance. A similar problem was reported by Pal (1983) for th€ stability equation method. Received 18 June 1991. i Department of Automatic Control and Systems Engineering, University of Sheffield, P.O. Box 600, Mappin Stre€ t, Shemeld S1 4DU, U.K. 002oj12t192 51.@ @ 1992 T4ylor & Fran tu Ltd.
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of The least squares Padé method for model reduction
rNr. r. sysrBMs scl., 1992, vol,. 23, No. 10, 1559-1570
The least squares Pad6 method for moilel retluction
LUIS ANTONIO AGUIRRET
This work describes a novel method for the reduction of SISO continuous models.The proposed method, the least squares Pad6 (LS-Pad6) method, proddes reducedmodels which incorporate some infomration about the original model over the mid-frequency range. Consequently, the present method gives better results than theclassical Pad6 and most of the related methods for a very small additional cost
1, IntroductionThe importance and relevance ofmodel order reduction can be verified from the
huge number ofworks published regarding the subject (Genesio and Milanese 1976,Bultheel and Van Barel 1986). In spite of the significant number of methods avail-able, no approach always gives the best results. Almost all methods, however, aim ataccurate reduced models for a low computational cost. In addition, it is desired topreserve the stability of the original model; i.e. given a stable high order model thereduced model should also be stable.
A popular method for model reduction is the Pad6 method (Shamash 1975)which has recently been used to reduce the model of a real system (Papadopulosand Boglou 1990). This technique is simple, usually gives good results and it is notcomputationally demanding. A well-known drawback of this method, however, isthat an unstable reduced model might arise from a stable model. Much effort hasbeen made to overcome this difficulty (see Bultheel and Van Barel 1986 and refer-ences therein).
A number of authors have tackled the problem of producing unstable reducedmodels in the following ways:
(a) retaining the dominant poles of the original system in the reduced model(Shamash 1975);
(b) determining the denominator of the reduced order model by techniqueswhich guarantee stability: e.g. the Routh method (Hutton and Friedlandl9?5) or the stability equation method (Chen et al. 1980), and then obtain-ing the numerator polynomial by the Pad6 method;
(c) imposing constraints at frequencies other than at s:0 (Xiheng 1987, Stahland Hippe 1988).
Although the methods in (a)-(c) provide stable reduced models, some dificultiescan be pointed out.
(i) Which poles are really dominant is not always evident and all the poles ofthe original model must be determined in advance. A similar problem wasreported by Pal (1983) for th€ stability equation method.
Received 18 June 1991.i Department of Automatic Control and Systems Engineering, University of Sheffield,
P.O. Box 600, Mappin Stre€t, Shemeld S1 4DU, U.K.
002oj12t192 51.@ @ 1992 T4ylor & Fran tu Ltd.
1560 L. A. Aguine
(ii) The methods grouped in (b) determine the numerator using Pad6 techniqueswhile the denominator is calculated by any method which guarantees stabi-lity. The reduced model stability, however, is assured to the detriment of itsaccuracy, since the number of Pad6 coefficients to be matched is reducedwhen compared with the classical Pad6 method. Some attempts have beenmade in order to increase the number of coemcients matched in partial-Pad6methods (e.g. Singh 1981, Lepschy and Viaro 1983, Alexandro 1984). Thesetechniques, however, are complicated and should only be used when thePad6 method fails to give stable models, since the latter always gives betterresults when the reduced model is stable (Lepschy and Viaro 1983).
(iii) Recently, several approaches have been proposed in which informationconcerning the original model over the mid-frequency range is included inthe reduced model (Xiheng 1987, Stahl and Hippe 1988, Hwang and Chen1988). As claimed by Xiheng (1987), the inclusion of mid-frequency infor-mation in the reduced model strongly reduces the probability of ending upwith an unstable model although it is still possible. The implementation ofsuch methods, however, is not as straightforward as the ones aforemen-tioned in (a)-(b).
The present work introduces a method for the order reduction of stable lineardynamic models in the frequency domain. The method is based on the Pad6approach and consequently has several of its nice properties, such as simplicityand ease of implementation. By incorporating some information about the originalmodel corresponding to higher frequencies, a better approximation over the mid-frequency range is obtained and, consequently, unstable models are very unlikely tohappen. This suggests the use of the present method even when the classical Pad6method does not fail to give a stable reduced mode1. Although the methods men-tioned in (c) give, in some cases, slightly better results, the LS-Pad6 method is mucheasier to implement and is far less time-consuming.
The work is organized as follows: in $2 the Pad6 method is reviewed; $3introduces the LS-Pad6 method and its main features are commented in $4; thestability issue is addressed in $5; finally, three numerical examples and some con-clusions are given in $$ 6 and 7, respectively.
2. The Parl6 method of model reductionConsider the following transfer function
96{g1s*...*!2sqG(rl=l,o+rrs+...+ld (r )
which can be expanded into
G(s) : ao f c1s * c2s2 f ... (2)
In the same way, another transfer function, R(s), and its expansion can be writtenrespectively as
R(r):
n(s):fn+f1s+f2sz+...
(3)
(4)
ao+ats+...laofbo+hs+...+b^sn
Least squ.eres Padi method for model reducti.on l56t
The infinite series (2) and (4) are the Taylor expansions of G(s) and .R(s),respectively, around the point s:0. Furthermore, R(s) is said to be a Pad6 approx-imant of G(s) if (Shamash 1975)
ci: fi i:0,1,2,...,p+m (5)
Using the final value theorem, one can easily verify that c0 is the steady-state gainof G(s). As (2) is an infinite series that exactly describes the response of C(r) at allfrequencies, and as its first term accounts for the gain at frequency 0, it seemssensible to think that as one adds terms in (2) one is better characterizing G(s) athigher frequencies. It should be noted that although (2) characterizes the behaviourof (1) over the whole frequency range, it is an expansion of G(s) about a singlefrequency, namelys:0.
The c; (i : 0, l, 2, . . .) are the Pad6 coefficients of G(s) and can be calculated from
In order to determine the p + ,tt + 2 coeficients of the reduced order model R(r)uniquely, p+m+2 constraints have to be used. The reduction of G(s) will thenconsist in the solution of a set ofp + nr f 2 equations in P + m + 2 unknowns ln theclassical Pad€ method p + m + I constraints are taken from (5) plus either one ofthefollowing: 6o = 1 or b- = l. kpschy and Viaro (1983) have shown that these twoconstraints are not totally equivalent.
It is clear that all the information about the original model that is incorporated inthe reduced model comes in the coefficients ci U=o,1,...,P+n). Partial-Pad6methods substitute some of the constraints in (5) for others that guarantee stability, e.g. the retention of dominant poles (Shamash 1975). In such cases the numberof Pad6 coefficients matched by -R(s) is reduced and so is its accuracy.
3, The LS-Pad6 methotl of model rerluctionAs stated before, all the information about G(r) used to obtain R(s) is conveyed
by the first p + n? + 1 terms of (2). The information contained in higher order termsis lost. This loss of information, especially over the mid-frequency range is the maincause of producing unstable and/or inaccurate reduced models (Xiheng 1987). Inorder to take into account some extra information about G(s), extra constraints areadded to the set of equations used to compute R(r). In this case, such a set has moreconstraints than unknowns and is solved in a least squares sense.
Thus the LS-PAde method incorporates extra information by the use of extraconstraints. Besides Pad6 coefficients, Markov parameters can be matched anddominant poles of G(s) can be retained in the reduced model. The Markov para-meters of G(s) are given by
where obviously gr: 0 for i > 4. The parameters given by (7) are the coemcients of
cs:gnf hs k-0)
"r=|,r-fr,,r-,f f o, 0,,]
mn= g"lh, k=01
^r:V^-r-fi'*,^r Il '' r "J
(6)
(7)
1562 L. A. Aguirre
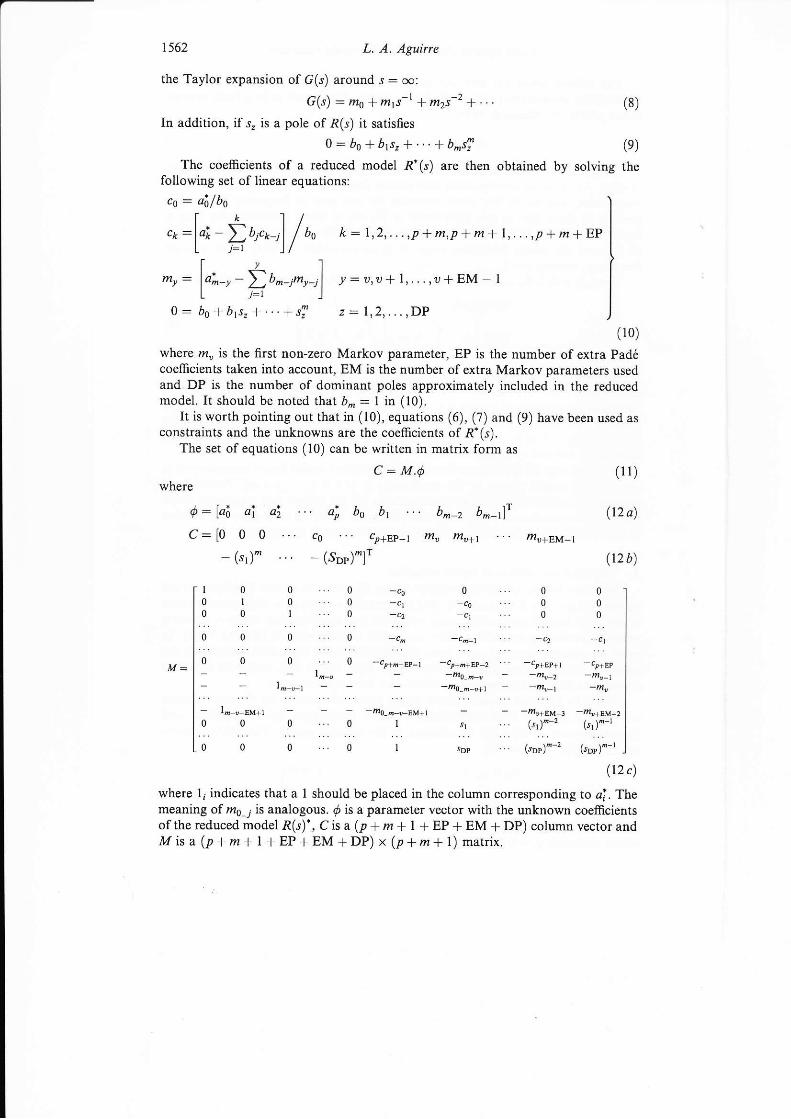
the Taylor expansion of G(s) around s : oo:
G(s): ryotmls-t a 1'5-2 1"'In addition, if s" is a pole of lR(s) it satisfies
0:bolbtsz+...+b^{The coemcients of a reduced model R-(s) are then obtained by solving
following set of linear equations:
(8)
(e)
the
co : atlbofrll
"r:l"i-l.t,rn,l f 6 k :1,2,...,p+m,p+m+1,...,p+m+EpI ;=' 'l/lvl
^,: lok-, - Lt^-,^,-,1 y=u,a t 1,...,r +EM IL .r=t l
0: bo i bts"i "'* !! z:1,2,...,DP(10)
\nhere mo is the first non-zero Markov parameter, EP is the number of extra Pad6coefficients taken into account, EM is the number of extra Markov parameters usedand DP is the number of dominant poles approximately included in the reducedmodel. It should be noted that 6-: I in (10).
It is worth pointing out that in (10), equations (6), (7) and (9) have been used asconstraints and the unknowns are the coeffcients of jR-(r).
The set of equations (10) can be written in matrix form as
C: M.6 (u)where
4: lait aI aic=[0 0 0 ...
... o) bo bt ... b^_2 b^-ir (za)co "' cp+Ep-t flh frt+t mx+8M,1
- (snp)-lr (12 b)
0
o
,. ; ""*,0
0
0
-co.:: :l-.1: l:'-ct+h+w-l -cp+6+FP-2.
- -ho n-o
. . . -..._:--'- mo-n-x-Ev+t1::
I s""
0000:::: :l
-ct+EP+t -carEP-mr-l-:.,
-m!iE\4 t -hr+EM-2(,,).-' (s, y.-r
] \a-1
(r2 c)
where 1; indicates that a 1 should be placed in the column corresponding to af. Themeaning of m6,; is analogous. { is a parameter vector with the unknown coefficientsofthe reduced model R(s)-, Cisa(p+m+ I + EP +EM + DP) column vector andM is a(p+m+ I +EP+EM+DP) x (p+rn +1) matrix.
Least squares Padi method for model reduction 1563
As can be seen from (l2c), the entries of M zre lhe Pad6 coefficients and theMarkov parameters of G(s) and the poles (and their powers) of c(.r) that should beapproximately retained in R(s). Thus M can be viewed as an information matrix ofthe original model.
The well-known least squares solution of (11) is:
O : (r,ir M)-1 ^d
c (13)
where the superscript I denotes matrix transposition.In order to assure steady-state gain agreement between the desired reduced model
R(s) and the original model G(s), c0 must be exactly malched. This is achieved asfollows:
n(s) : R(s)-/c
where
IfEP: EM : DP:0, then /c = I and Mis a non-singular square matrix. In thiscase d can be determined directly from (l l) and it is the classical Pad6 solution. Thisshows that the Pad6 method is a special case of the present approach.
4, Comments on the LS-Pad6 methodThe inclusion of extra Pad6 coefrcients in the set of constraints provides addi-
tional information about the original model at higher frequencies as discussed ear-lier. The addition of extra Markov parameters provides extra information aboutG(s) at very high frequencies. Finally, the use of dominant poles may be usefulspecially in those cases where fast poles with large residues are present in G(s) andshould be retained in R(s) (Pal 1983).
As it is evident from (13), the reduced order model obtained by the LS-Pad6method no longer matches exactly p + m + I Pad6 coefficients of the original model.On the other hand, however, the proposed
'JJielhod approximately m tches
p+m+l+EP Pad6 coefficients and EM Markov parameters of G(s) andapproximately retains DP poles of the original model. The fact that a perfect match-ing of Pad6 coefficients and of Markov parameters is not necessarily the best choicefor model reduction purposes, has been pointed out before (Ashoor and Singh 1982).
At this point the following question arises: which values of EP, EM and of DPshould be used? As suggested before, fast poles of G(s) with large residues should beretained in R(s) and this is a good clue to the value ofDP. Unfortunately there seemsto be no such straightforward way to determine the best combination of EP and EM.Nevertheless, because of the nice properties of the method the following simpleprocedure can implemented at a very small additional cost.
Sl€? l. Choos€ the number of dominant pol€s, DP, to be approximately retained inR(,).
Step 2. Set maximum values for EP and EM: MEP and MEM respectively.
,ttep 3. Solve (13) for each possible combination ofDP, EP and EM and, based onsome performance index, choose the best reduced model.
t :'oboai:)
( r4)
(15)
1564 L. A. Aguirre
The above procedure assumes that the reduced model order, nr, has already beenchosen.
As the infinite series (2) and (8) converge rapidly, there is no need to choose largevalues for MEP and MEM. In general values around 5 are good choices. Furtherimprovement can be obtained if a recursive least squares (RLS) algorithm is used tosolve (13) in step 3. In this case a different coefrcient vector, {, is determined at eachiteration.
It should be noted that for large values of EP and EM matrix M is likely tobecome ill-conditioned. The values of EP and EM for which ill-conditioning happensvary widely case to case.
The performance index used in the examples of $ 6 was the integral of squarederrors between the step responses of the original and reduced models. This choice isby no means unique. Furthermore it has been suggested that the choice of the inputused to test the reduced model accuracy strongly influences the selection of anappropriate simplified model for design purposes (Lastman and Sinha 1985). Thususing different performance indexes in Step 3 may lead to different reduced modelswhich could be more appropriate in a specific design problem. Thus the procedureoutlined above enables the use of different inputs and performance indexes in themodel simplification in a very natural and automatic way.
It should be pointed out that if the difference between the number of poles andzeros of G(s) is maintained, its null Markov parameters are matched by n(.r). Ingeneral, this is not possible for methods based on th€ truncation of continuedfraction expansions of the original model (e.g. Hwang and Chen 1988).
When the frequency response ofthe original model has more than one large peak,the reduced models obtained by using LS-Pad6 are rather inaccurate. In these cases,methods which explicitly include approximation constraints at frequencies otherthan r:0 and s: m (e.g. Xiheng 1987, Hwang and Chen 1988) should be tried.
As the present method is based on the approximate matching of Pad6 coefrcientsand of Markov parameters as well as a possible approximate retention of dominantpoles, the main principles established to date conceming the exact matching of thesecoefficients and the exact retention of poles in reduced models are still valid andproved to be very helpful in understanding and applying the LS-Pad6 method.
5. StabilityconsiderationsIt is well known that tlre classical Pad6 method does not assure the simplified
model stability. This is expected since the constraints used (see (5)) only guaranteethe matching of some Pad6 coemcients.
In a similar way, the LS-Pad6 technique does nol mathematically Eu:ara'nlee lhereduced model stability. However, this problem is indirectly solved as pointed out inthe following remarks.
Remark IIt has been argued that the poor approximation of a model over the mid-fre-
quency range is the main reason for unstable or inaccurate reduced models (Xiheng1987). By incorporating extra information in the simplified model as shown in $ 3, abetter approximation to the original model over the mid-frequency range is achievedand unstable models very rarely occur.
Leqst squares Padi melhod for model reduction 1565
Remark 2By approximately retaining stable poles in the reduced model, its stability can be
assured. This can easily be seen by considering the extreme case where DP : m 'fheretention of poles, however, should be left as the last resort used to obtain stablemodels since usually it implies loss of accuracy.
To summarize, as a by-product of improving the approximation of the originalmodel over the mid-frequency range, the probability of obtaining unstable models issignificantly reduced. However, if unstable models do result, stability can be forcedby means of retaining dominant poles.
Hence, although there is no constraint used to guarant@ the reduc€d modelstability, this problem is considered solved in the LS-Pad6 method from a practicalpoint of view.
6. Numerical resultsIn this section three numerical examples are presented in order to illustrate some
of the main features of the proposed method.
Example 1
Consider the high order model (Xiheng 1987):
24 0260ss + 59 4821sa + 55.9915s3 +27.8%41 +7.8764s|_|vr \J/ - 01380916 + 5.2632s5 + 16.7839! * 17.4086s3 + 24.1790s2 + 10.0024s -l I
(r6)
The reduced model obtained using the FF-Pad6 method (Xiheng 1987), with theextra frequencies 0'2 and l 5 rad s-l, and by Routh's method (Hutton and Friedland1975) are, respectively:
52.0430s3 + 27'3927s2 +7.8764s + |Rn.*r(s) :5.0106.y' + 12.395%1 +23.6777s2 + 10.0024s + 1
Rrr-p"ac(s): t4-0402s3 + 12.0997s2 +4.8251s+10.1926/ +42956s:11.8996s2 + 6'9517s + I
The reduced model obtained using the LS-Pad6 method with EP : 0, EM : 2 andDP:OiS
Rrs-p"ae(r): 51.0006s3 + 31.3 t 88s2 + '11-9106s -t 2.3726 (l e)sa + I I 8392sr * 8.0584s2 t 16.9548s 12.3726
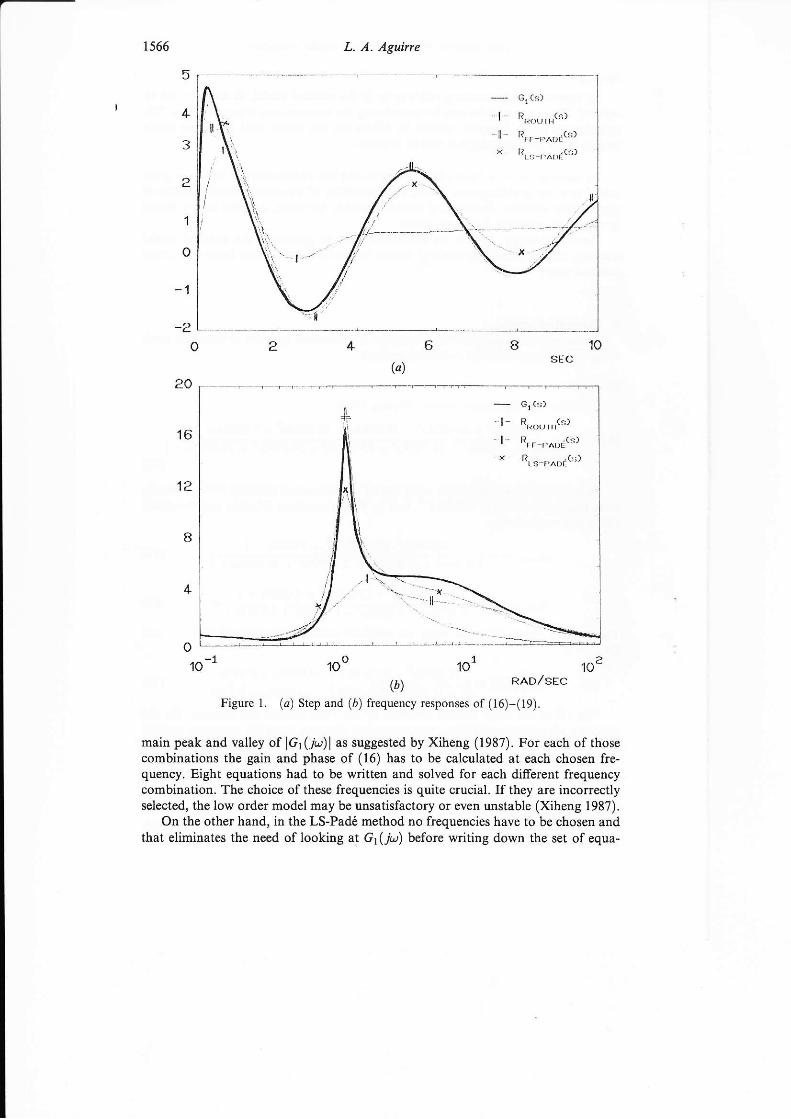
The 1/2 to 4/5 order models obtained by the Pad6 method are unstable. On thecontrary, all the corresponding reduced models obtained using the proposed methodare stable. The step and frequency responses of (16)-(19) are depicted respectively inFig. 1(a) and I (b). The LS-Pad6 reduced model is slightly less accurate than ( 18) as aconsequence of a much simpler and less time-consuming order reduction procedure.
There seems to be no systematic procedure to determine the 'optimal' numberand values of frequencies to be used in the FF-Pad6 method. Indeed, the reducedmodel (18) was chosen from 289 different reduced models obtained by 289 combi-nations of two frequencies which were allowed to range about the frequencies of the
( 17)
(r8)
t566 L. A. Aguirre
10- 100 1o1 1ozRAD/sEc(r)
Figure 1. (a) Step and (D) frequency responses of (16) (19).
main peak and valley of lG1(ja.')l as suggested by Xiheng (1987). For each of thosecombinations the gain and phase of (16) has to be calculated at each chosen fre-quency. Eight equations had to be written and solved for each diferent frequencycombination. The choice of these frequencies is quite crucial. If they are incorrectlyselected, the low order model may be unsatisfactory or even unstable (Xiheng 1987).
On the other hand, in the LS-Pad6 method no frequencies have to be chosen andthat eliminates the need of looking at G1(jw) before writing down the set of equa-
- G1(s)
'l.' Rriourl(s)- ll Rr r ,-^od(s)x Rr .- -p^,)F.(.J)
- G1(s)
. Jl- R, r_p^r)d(s)'x RLs p^Di(s)
Least squares Pade method for model reduction 1567
tions. As suggested, the values MEP : 5, MEM - 5 and DP : 0 were used. Thisgives a total of 36 reduced models tested. Furthermore, the proposed method onlyuses Pad6 coefrcients and Markov parameters that are much easier to obtain thanthe gain and phase ofthe original model. It should be noted that in Xiheng's method,the Pad€ coefiicients must be computed as well.
Example 2The following transfer function was taken from the work of Lepschy and Viaro
(1e82):
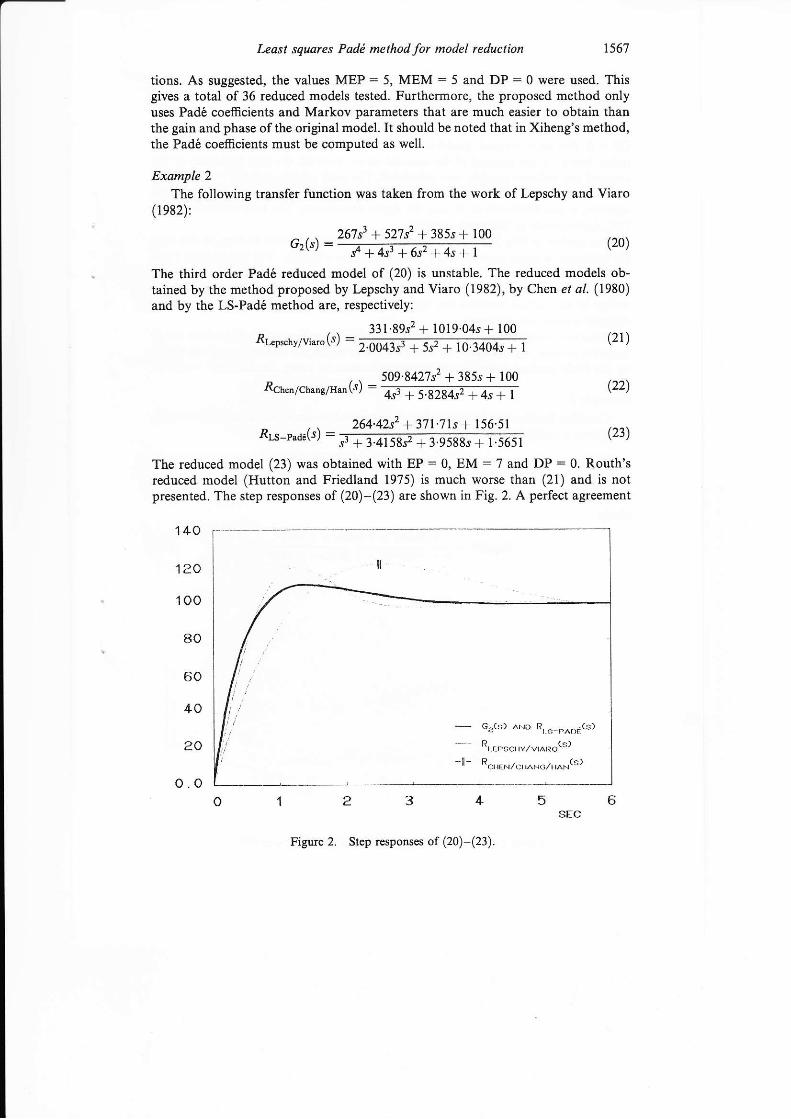
cr(s): 261ll + 527s2 + 385s + loo (20)y'+4sl+6s2+4s+lThe third order Pad6 reduced model of (20) is unstable. The reduced models ob-tained by the method proposed by Lepschy and Viaro (1982), by Chen et a/. (1980)and by the LS-Pad6 method are, respectively:
331.89s2 + 1019.04s -| 100Rl-eps"ny/v".o (s) :
2.004313 + 5r2 + 10.3404s + 1(2r )
509.8427s2+385s*100Rcl"n/clane/Ha' (s) (22)
(23)s3 + 3'4158s2 + 3.9588s + 15651
The reduced model (23) was obtained with EP : 0, EM : 7 and DP : 0. Routh'sreduced model (Hutton and Friedland 1975) is much worse than (21) and is notpresented. The step responses of (20)-(23) are shown in Fig. 2. A perfect agreement
R15-p"65(s) : 264.42s2 + 37l.7ls + 156 51
tl
G^(--) ^rrh R (r)Rrr"scr,t/vrano(s)Rcrro"z..,,o".z',or(s)
Figue 2. Step responses of (20)-(23).
140
1?O
'l oo
ao
60
40
20
o.l
1568 L. A. Aguirre
between the responses of (20) and the reduced LS-Pad€ model, (23), was achieved. Itis worth noting that (20) has a quadruple pole at s: -l and consequently methodsbased on the retention of dominant modes are not appropriate in this case.
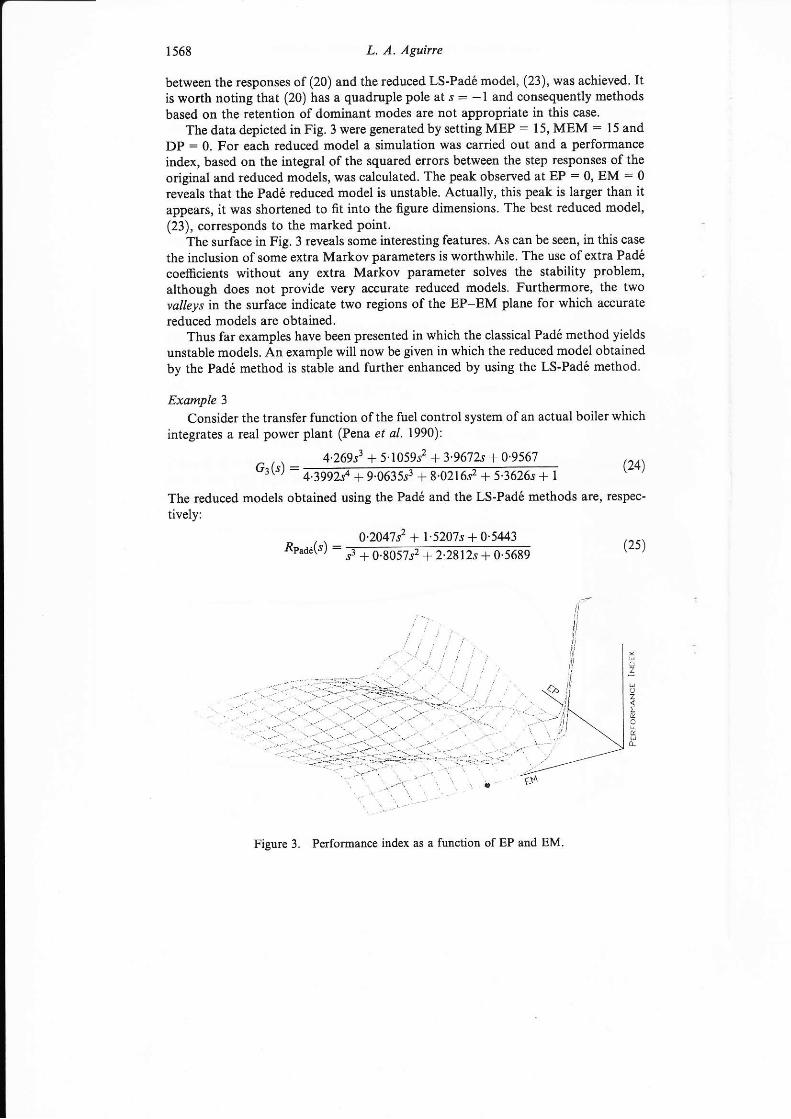
The data depicted in Fig. 3 were generated by setting MEP : 15, MEM : 15 andDP : 0. For each reduc.ed model a simulation was carried out and a performanceindex, based on the integral of the squared errors between the step responses of theoriginal and reduced models, was calculated. The peak observed at EP : 0, EM : 0reveals that the Pad6 reduced model is unstable. Actually, this peak is larger than itappears, it was shortened to fit into the figure dimensions. The best reduced model,(23), corresponds to the marked point.
The surface in Fig. 3 reveals some interesting features. As can be seen, in this casethe inclusion of some extra Markov parameters is worthwhile. The use ofextra Pad6coefrcients without any extra Markov parameter solves the stability problem,although does not provide very accurate reduc€d models. Furthermore, the twovalleys it the surface indicate two regions of the EP-EM plane for which accuratereduced models are obtained.
Thus far examples have been presented in which the classical Pad6 method yieldsunstable models. An example will now be given in which the reduced model obtainedby the Pad6 method is stable and further enhanced by using the LS-Pad6 method.
Example 3
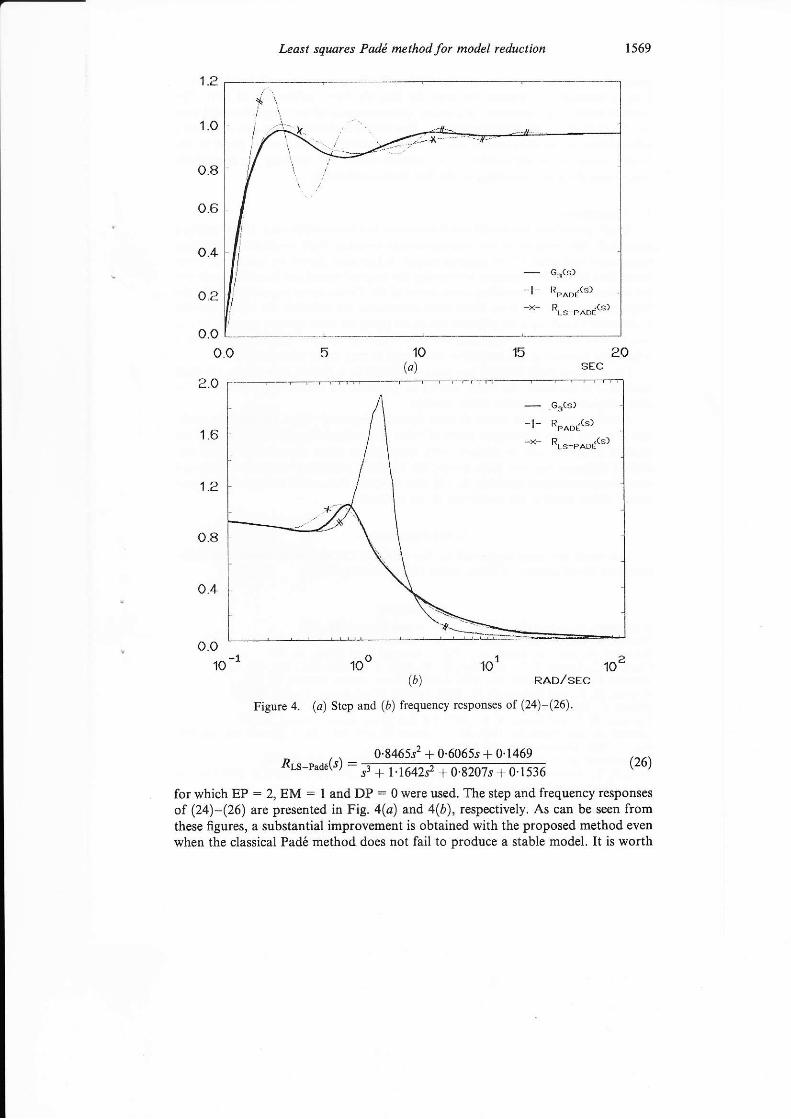
Consider the transfer function of the fuel control system of an actual boiler whichintegrates a real power plant (Pena et al' 1990):
G3(s) : 4.269s3+51059s2 + 3'9672s +0'9567 (24)4.3992{ + 9'0635s3 + 8.0216.P + 5.3626r + I
The reduced models obtained using the Pad6 and the LS-Pad6 methods are, respec'tively:
Rp"65(s) : 0.2047 3 + 1.52O7s-t 0.5443s3 + 0.805?s2 + 2.2812s * 0.5689
Figure 3. Performance index as a function of EP and EM.
(25)
;zE
Least squares Padi method for model reduction
a
- G3(s)
x. RLs P^DJS)
10(a)
102RAD,/sEC
1569
1.O
oa
o.4
o.6
o.ooo
o.o10 -1 100 101
(6)
Figure 4. (a) Step and (b) frequency responses ot Q\-Q6)
8rs-p"ac(") : 0.8465s2 + 0.6065s+ 0.1469 (26)13 + 1.1642P + o.82o7s .]. 0.1536
for which EP : LEM : I and DP : 0 were used. The step and frequency responsesof Q$-Q6) are presented in Fig. 4(a) znd 4(b), respectively. As can be seen fromthese figures, a substantial improvement is obtained with the proposed method evenwhen the classical Pad6 method does not fail to produce a stable model. It is worth
2A15
o.a
2.O
'1.6
't.?
o.8
o.4
r570 Least squares Padi method for model reducti.on
noting that (25) is more accurate that (26) in the frequency range (0.3-0.6) rad s-t.This is because (25) exactly matches the first six Pad6 coeftcients of (24). Thereduced model (26), however, is a better approximation of the original model overthe range of mid- and high-frequencies. This example illustrates the fact that extrainformation at mid-frequencies can be used by including some more terms of theTaylor series in the derivation of the reduced model and relaxing the constmintsconceming the exact matching of the first Pad6 coefficients.
7. ConclusionsA new procedure for model order reduction has been introduced. In the method
presented, the reduced model approximately matches Pad6 coefficients, Markovparameters and poles of the original model. It has been shown by numerical simu-lation that further information concerning the original model can be introduced intothe reduced model by including extra terms of the Taylor series expansion about thefrequencies s : 0 and s : m. Since extra constraints are included, the reduced modelis obtained by solving a set oflinear equations using the least squares method. In thisway further information regarding the mid-frequency range of the original model istaken into account in the reduction procedure at very small additional cost.
The classical Pad6 nethod has been shown to be a special case of the LS-Pad6method. Furthermore, the latter should be preferred to the former even when theclassical technique provides stable models.
As a by-product of a better fit over the mid-frequency range, the stability prob-lem is solved from a practical point of view. The reduced models obtained by themethod presented are, in general, very accurate. In cases where the original fre-quency response has two large peaks, the LS-Pad6 method gives poor results andmore time-consuming methods should then be used. Numerical examples were pre-sented which confirm the usefulness of the method.
AcxtownncurvrsThis work has been supported by the Brazilian Council of Scientific and Tech-
nological Development CNPq, under Grafi 200597190-6.
RrnrnrNcrsArexmono, F. J., Jr, 1984, I.E.E.E. Trqw. autom. ContrcL29,159.AsEooR, N., and SrNon, V., 1982, Electron. IEtl.,18, 496.BULTHEEL, A., and VAN BAREL, M., 1986, "/' Comput. Appl. Math.,14,401.CrrEN, T. C., Cu-rNc, C. Y., ard HAN, K. W., 1980, J. Franklin Inst.,3o9, 473-GENEsro, R., and MrLALEsE, M., 1976, I.E.E.E. Trans. Autom. Conhol,27, ll8.HurroN, M. F., and FRTEDLAND, 8., 1975, I.E.E.E. Trsns. autom. Control,20,3i9.HuNc, C,, and Cner, M. Y., 1988, Proc. Instn elect. Engrs, PtD,l35, 441.LASTMAN, G. J., and STNHA, N. K., 1985, I.E.E.E. Trans. autom. Control, N,301.Lerscnv, A., and Vnro, U., 1982, Int. J. Control,36,643; 1983, Int. ,1. Systems Sci.,14,633.Pr-r, J,, 1983, Electron. I*rt.,19, 426.PAlADopur,os, D. P., and BoGLou, A. K., 1990, I\t. I. 8)stems Sci.,2l, 629.PENA, R. T., Aounnr, L. A., and MENDFT, E. M. A. M., 1990, Proc. I.E.E.E.29th Conf. on
Decision and Contrcl Hawaii, p. 1567.SEAMASH, Y., 1975, Int. J. Control,21, 257.STNGH, V., 1981, Proc. Inst. elect. electron. Engrs,69, 1155.Surrr, H., and Hee, P., 1988, I.E.E.E., Trons. autom. Control,33,415.XrurNc, H., 198'l , I.E.E.E. Trans. autom. Control,32,243.




















