Study of riverine deposits using electromagnetic methods at a low induction number
8
Case History Study of riverine deposits using electromagnetic methods at a low induction number Luigi Sambuelli 1 , Salvatore Leggieri 1 , Corrado Calzoni 1 , and Chiara Porporato 1 ABSTRACT We conducted electromagnetic EM profiles along the Po River in Turin, Italy. The aim of this activity was to verify the applicability of low-induction-number EM multifrequency soundings carried out from a boat in riverine surveys and to determine whether this technique, which is cheaper than air- carried surveys, could be used effectively to define the typol- ogy of sediments and to estimate the stratigraphy below a ri- verbed. We used a GEM-2 handheld broadband EM sensor operating with six frequencies to survey the investigated area. Ground-penetrating radar GPR, a conductivity meter, and a time-domain reflectometer were used to estimate the bathymetry and to measure the EM properties of the water. A global positioning system, working in real-time kinematic mode, tracked the route of the boat with centimetric accuracy. We analyzed the induction number, the depth of investigation DOI, and the sensitivity of our experimental setup by for- ward modeling — varying the water depth, frequency, and bottom-sediment resistivity. The simulations optimized the choice of the frequencies that could be used reliably for the interpretation. The 3406-Hz signal had a DOI in the Po River water 27 m of 2.5 m and provided sediment resistivities higher than 100 m. We applied a bathymetric correction to the conductivity data using the water depths obtained from the GPR data. We plotted a map of the river bottom resistivity and compared this map to the results of a direct sediment sampling campaign. The resistivity values 120–240 m were compatible with the saturated gravel and pebbles in a sandy matrix, which resulted from direct sampling and with the known geology. INTRODUCTION Inland waters can be of great interest from several points of view: civil water supplies, waterways, resort activities, material dredging, bridge scours, river bar monitoring, harbor and river engineering, environmental interactions with shallow aquifers, recharge areas, erosion, submerged unexploded ordnance UXO in bombed indus- trial cities, or disaster planning flood prevention and mitigation. Some usual shallow-water geophysics techniques and some other techniques borrowed from near-surface geophysics can help to re- solve problems such as bathymetry mapping, riverbed characteriza- tion, and UXO detection. Boat-carried ground-penetrating radar GPR and seismic meth- ods have been used for inland riverine surveys. Beres and Haeni 1991 have used GPR to study selected stratified-drift deposits in Connecticut. Dudley and Giffen 1999 ran a GPR survey along 50 miles of the Penobscot River, Maine, in the spring of 1999 to pro- duce maps describing the composition and distribution of streambed sediments. Webb et al. 2000 have used GPR to estimate water depths and identify infilled fluvial scour features, acquired at 10 dif- ferent bridge sites in southeastern and central Missouri. Toth 2004 has used a newly designed GPR combined with seismic methods to survey the Danube River in the center of Budapest, Hungary. The aim of our research was to verify the applicability of electro- magnetic EM dipole-dipole methods with a handheld multifre- quency GEM-2 broadband sensor Won et al., 1996 to define the ty- pology of the streambed sediments. Up to now, frequency-domain electromagnetic FDEM systems have rarely been utilized in river- ine soundings because of EM interference between the transmitted signal and the boat engine. Butler et al. 2004 have conducted a sur- vey concerning these applications to delineate the recharge area to a Manuscript received by the Editor September 15, 2006; revised manuscript received March 20, 2007; published online July 27, 2007. 1 Politecnico di Torino, DITAG Dipartimento di Ingegneria del Territorio, dell’Ambiente e delle Geotecnologie, Turin, Italy. E-mail: luigi.sambuelli@ polito.it; [email protected]; [email protected]; [email protected]. © 2007 Society of Exploration Geophysicists. All rights reserved. GEOPHYSICS, VOL. 72, NO. 5 SEPTEMBER-OCTOBER 2007; P. B113–B120, 10 FIGS., 3 TABLES. 10.1190/1.2754249 B113
Transcript of Study of riverine deposits using electromagnetic methods at a low induction number
C
Sm
L
p©
GEOPHYSICS, VOL. 72, NO. 5 SEPTEMBER-OCTOBER 2007; P. B113–B120, 10 FIGS., 3 TABLES.10.1190/1.2754249
ase History
tudy of riverine deposits using electromagneticethods at a low induction number
uigi Sambuelli1, Salvatore Leggieri1, Corrado Calzoni1, and Chiara Porporato1
cbeetStst
o
Cmdsdfhs
mqpeisv
t receivrio, dell@polito
ABSTRACT
We conducted electromagnetic EM profiles along the PoRiver in Turin, Italy. The aim of this activity was to verify theapplicability of low-induction-number EM multifrequencysoundings carried out from a boat in riverine surveys and todetermine whether this technique, which is cheaper than air-carried surveys, could be used effectively to define the typol-ogy of sediments and to estimate the stratigraphy below a ri-verbed. We used a GEM-2 handheld broadband EM sensoroperating with six frequencies to survey the investigatedarea. Ground-penetrating radar GPR, a conductivity meter,and a time-domain reflectometer were used to estimate thebathymetry and to measure the EM properties of the water. Aglobal positioning system, working in real-time kinematicmode, tracked the route of the boat with centimetric accuracy.We analyzed the induction number, the depth of investigationDOI, and the sensitivity of our experimental setup by for-ward modeling — varying the water depth, frequency, andbottom-sediment resistivity. The simulations optimized thechoice of the frequencies that could be used reliably for theinterpretation. The 3406-Hz signal had a DOI in the Po Riverwater 27 m of 2.5 m and provided sediment resistivitieshigher than 100 m. We applied a bathymetric correction tothe conductivity data using the water depths obtained fromthe GPR data. We plotted a map of the river bottom resistivityand compared this map to the results of a direct sedimentsampling campaign. The resistivity values 120–240 mwere compatible with the saturated gravel and pebbles in asandy matrix, which resulted from direct sampling and withthe known geology.
Manuscript received by the Editor September 15, 2006; revised manuscrip1Politecnico di Torino, DITAG Dipartimento di Ingegneria del Territo
olito.it; [email protected]; [email protected]; chiara.porporato2007 Society of Exploration Geophysicists.All rights reserved.
B113
INTRODUCTION
Inland waters can be of great interest from several points of view:ivil water supplies, waterways, resort activities, material dredging,ridge scours, river bar monitoring, harbor and river engineering,nvironmental interactions with shallow aquifers, recharge areas,rosion, submerged unexploded ordnance UXO in bombed indus-rial cities, or disaster planning flood prevention and mitigation.ome usual shallow-water geophysics techniques and some other
echniques borrowed from near-surface geophysics can help to re-olve problems such as bathymetry mapping, riverbed characteriza-ion, and UXO detection.
Boat-carried ground-penetrating radar GPR and seismic meth-ds have been used for inland riverine surveys. Beres and Haeni1991 have used GPR to study selected stratified-drift deposits inonnecticut. Dudley and Giffen 1999 ran a GPR survey along 50iles of the Penobscot River, Maine, in the spring of 1999 to pro-
uce maps describing the composition and distribution of streambedediments. Webb et al. 2000 have used GPR to estimate waterepths and identify infilled fluvial scour features, acquired at 10 dif-erent bridge sites in southeastern and central Missouri. Toth 2004
as used a newly designed GPR combined with seismic methods tourvey the Danube River in the center of Budapest, Hungary.
The aim of our research was to verify the applicability of electro-agnetic EM dipole-dipole methods with a handheld multifre-
uency GEM-2 broadband sensor Won et al., 1996 to define the ty-ology of the streambed sediments. Up to now, frequency-domainlectromagnetic FDEM systems have rarely been utilized in river-ne soundings because of EM interference between the transmittedignal and the boat engine. Butler et al. 2004 have conducted a sur-ey concerning these applications to delineate the recharge area to a
ed March 20, 2007; published online July 27, 2007.’Ambiente e delle Geotecnologie, Turin, Italy. E-mail: [email protected].
rsirsdI
ia
••
•
•
•
Oogtap
cke
bscgmHsrr
fiatsti
sptanuwoob
fptbt
npfWbarl==as
ssosste
m
Ft
Ftm
B114 Sambuelli et al.
iver valley aquifer on the Saint John River Fredericton, New Brun-wick using a combination of three geophysical surveys: resistivitymaging along the shoreline, seismic surveys, and EM methods car-ied above the water subsurface. The results of the research wereuccessful, and the geophysical interpretations were confirmed by-rilling. We acquired GEM-2 multifrequency data on the Po River intaly, mainly according to the method used by Butler et al. 2004.
METHODS
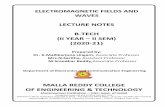
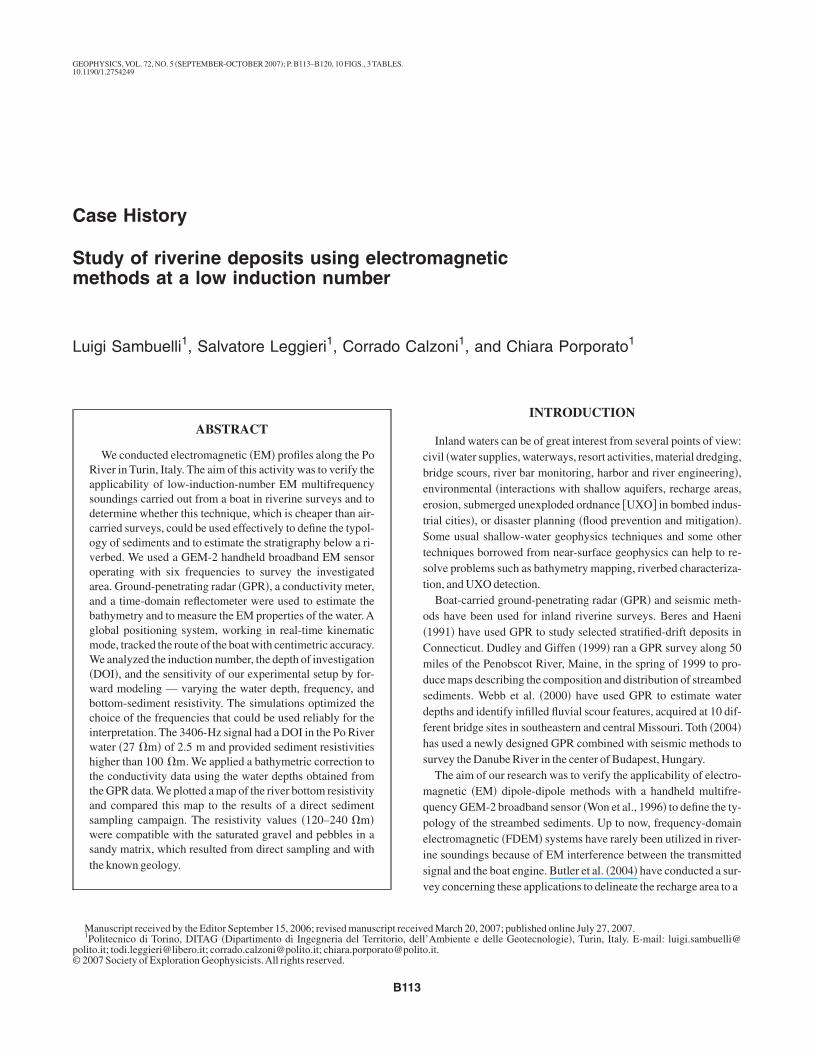
The measurements were conducted along a stretch of the Po Rivern Turin near Valentino Park, using the following instruments aboardmotorboat Figure 1:
a Geophex GEM-2 handheld broadband conductivity meteran IDS RIS/0 k2 georadar with a TR200 antenna 200-MHz cen-tral frequencya Tektronix 1502c time-domain reflectometer, or TDR to mea-sure water permittivitya ProfiLine-197 conductivity meter to measure water conductivi-ty and temperaturetwo LEICASystem 1200 GPS L1 + L2 receivers
In the first survey, two GPS receivers were placed aboard a boat.ne of the antennas was positioned at the stern, the other at the prowf the boat; both were fixed atop a 50-cm wooden pole to ensurereater visibility of the antennas and to reduce multiple paths. Thewo receivers were needed 1 to determine the bearing of the boatnd provide a second-by-second geographical reference of the geo-hysical instruments in an absolute reference system and 2 to cal-
A1
6.50
1.10
RadarGEM-2
A2
igure 1. Layout of the motorboat used for the survey: A1 and A2 arehe DGPS antennas; the dimensions are in meters.
4990250
4990000
4989750
4989500
4989264.85
East - WGS84 (m)
Nor
th -
WG
S84
(m
)
396276.25 396500
B
Turin
396750 397000 397250 397500
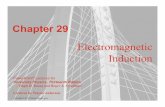
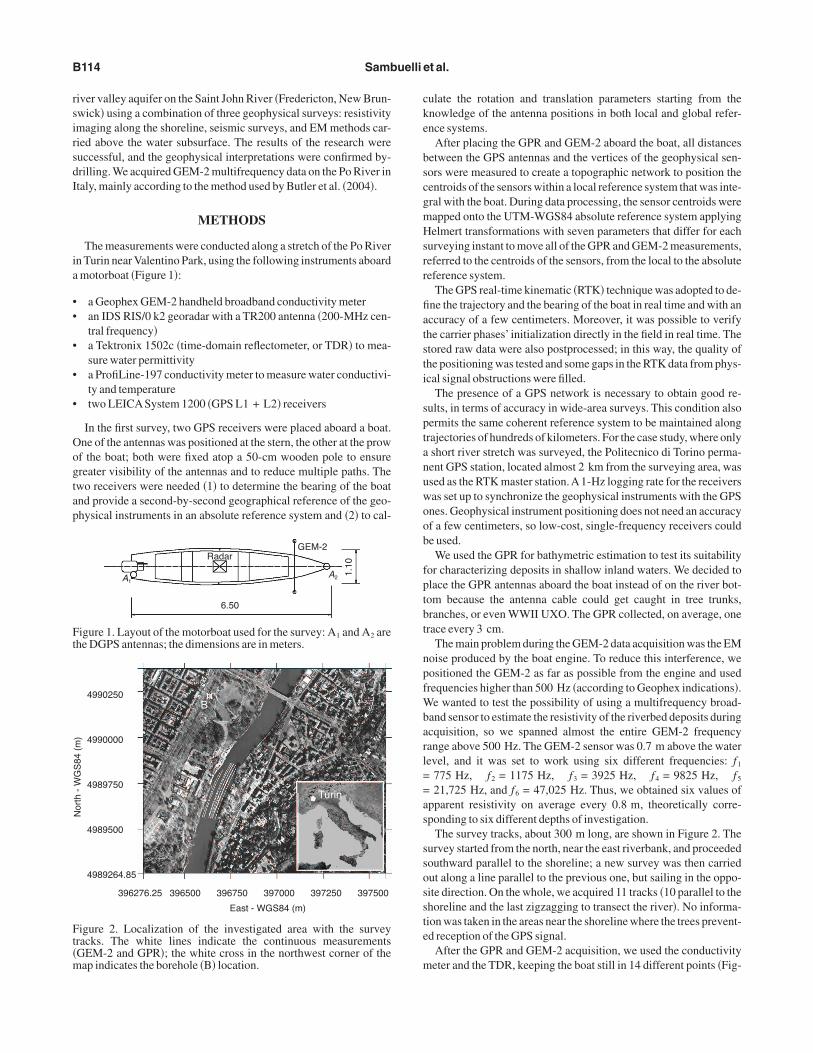
igure 2. Localization of the investigated area with the surveyracks. The white lines indicate the continuous measurementsGEM-2 and GPR; the white cross in the northwest corner of theap indicates the borehole B location.
ulate the rotation and translation parameters starting from thenowledge of the antenna positions in both local and global refer-nce systems.
After placing the GPR and GEM-2 aboard the boat, all distancesetween the GPS antennas and the vertices of the geophysical sen-ors were measured to create a topographic network to position theentroids of the sensors within a local reference system that was inte-ral with the boat. During data processing, the sensor centroids wereapped onto the UTM-WGS84 absolute reference system applyingelmert transformations with seven parameters that differ for each
urveying instant to move all of the GPR and GEM-2 measurements,eferred to the centroids of the sensors, from the local to the absoluteeference system.
The GPS real-time kinematic RTK technique was adopted to de-ne the trajectory and the bearing of the boat in real time and with anccuracy of a few centimeters. Moreover, it was possible to verifyhe carrier phases’ initialization directly in the field in real time. Thetored raw data were also postprocessed; in this way, the quality ofhe positioning was tested and some gaps in the RTK data from phys-cal signal obstructions were filled.
The presence of a GPS network is necessary to obtain good re-ults, in terms of accuracy in wide-area surveys. This condition alsoermits the same coherent reference system to be maintained alongrajectories of hundreds of kilometers. For the case study, where onlyshort river stretch was surveyed, the Politecnico di Torino perma-ent GPS station, located almost 2 km from the surveying area, wassed as the RTK master station.A1-Hz logging rate for the receiversas set up to synchronize the geophysical instruments with the GPSnes. Geophysical instrument positioning does not need an accuracyf a few centimeters, so low-cost, single-frequency receivers coulde used.
We used the GPR for bathymetric estimation to test its suitabilityor characterizing deposits in shallow inland waters. We decided tolace the GPR antennas aboard the boat instead of on the river bot-om because the antenna cable could get caught in tree trunks,ranches, or even WWII UXO. The GPR collected, on average, onerace every 3 cm.
The main problem during the GEM-2 data acquisition was the EMoise produced by the boat engine. To reduce this interference, weositioned the GEM-2 as far as possible from the engine and usedrequencies higher than 500 Hz according to Geophex indications.
e wanted to test the possibility of using a multifrequency broad-and sensor to estimate the resistivity of the riverbed deposits duringcquisition, so we spanned almost the entire GEM-2 frequencyange above 500 Hz. The GEM-2 sensor was 0.7 m above the waterevel, and it was set to work using six different frequencies: f1
775 Hz, f2 = 1175 Hz, f3 = 3925 Hz, f4 = 9825 Hz, f5
21,725 Hz, and f6 = 47,025 Hz. Thus, we obtained six values ofpparent resistivity on average every 0.8 m, theoretically corre-ponding to six different depths of investigation.
The survey tracks, about 300 m long, are shown in Figure 2. Theurvey started from the north, near the east riverbank, and proceededouthward parallel to the shoreline; a new survey was then carriedut along a line parallel to the previous one, but sailing in the oppo-ite direction. On the whole, we acquired 11 tracks 10 parallel to thehoreline and the last zigzagging to transect the river. No informa-ion was taken in the areas near the shoreline where the trees prevent-d reception of the GPS signal.
After the GPR and GEM-2 acquisition, we used the conductivityeter and the TDR, keeping the boat still in 14 different points Fig-
uptms
tespmtpa
trHeadct
n
um1vv
sstrtaFg
Gpab−ce
tnlafc
Tl
D
1
1
1
1
1
1
2
2
2
2
3
6Fp
Riverine deposits mapped by broadband EM B115
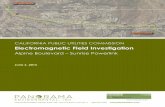
re 3 to conduct punctual measurements of the conductivity, tem-erature, and dielectric constant of the water at different depths. Inhis second survey, the LEIKAGPS allowed us to locate the punctual
easurements in points close to the tracks followed in the firsturvey.
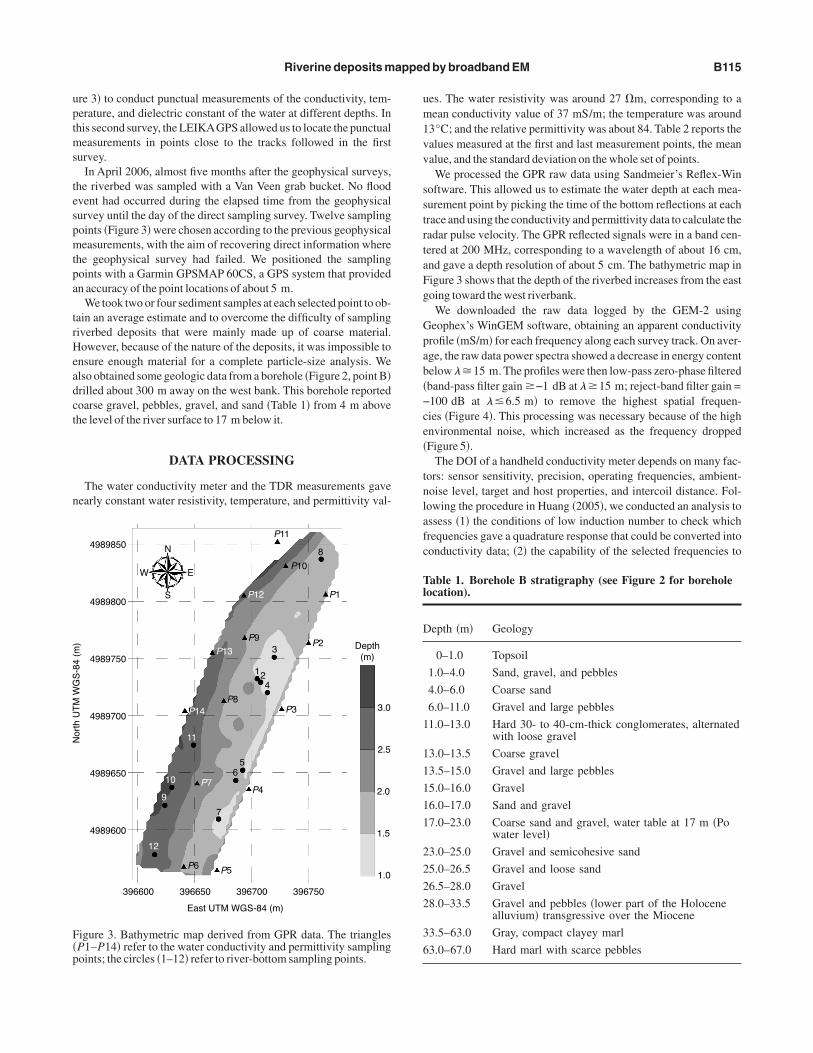
In April 2006, almost five months after the geophysical surveys,he riverbed was sampled with a Van Veen grab bucket. No floodvent had occurred during the elapsed time from the geophysicalurvey until the day of the direct sampling survey. Twelve samplingoints Figure 3 were chosen according to the previous geophysicaleasurements, with the aim of recovering direct information where
he geophysical survey had failed. We positioned the samplingoints with a Garmin GPSMAP 60CS, a GPS system that providedn accuracy of the point locations of about 5 m.
We took two or four sediment samples at each selected point to ob-ain an average estimate and to overcome the difficulty of samplingiverbed deposits that were mainly made up of coarse material.owever, because of the nature of the deposits, it was impossible to
nsure enough material for a complete particle-size analysis. Welso obtained some geologic data from a borehole Figure 2, point Brilled about 300 m away on the west bank. This borehole reportedoarse gravel, pebbles, gravel, and sand Table 1 from 4 m abovehe level of the river surface to 17 m below it.
DATA PROCESSING
The water conductivity meter and the TDR measurements gaveearly constant water resistivity, temperature, and permittivity val-
4989850
4989800
4989750
4989700
4989650
4989600
3.0
2.5
2.0
1.5
1.0
East UTM WGS-84 (m)
Nor
th U
TM
WG
S-8
4 (m
)
396600
12
9
7
65
4
3
8
P11
P10
P1
P2
P3
Depth (m)
P4
P5 P6
P7
P8
P9
P12
N
S
E W
P13
P14
2 1
10
11
396650 396700 396750
igure 3. Bathymetric map derived from GPR data. The trianglesP1–P14 refer to the water conductivity and permittivity samplingoints; the circles 1–12 refer to river-bottom sampling points.
es. The water resistivity was around 27 m, corresponding to aean conductivity value of 37 mS/m; the temperature was around
3°C; and the relative permittivity was about 84. Table 2 reports thealues measured at the first and last measurement points, the meanalue, and the standard deviation on the whole set of points.
We processed the GPR raw data using Sandmeier’s Reflex-Winoftware. This allowed us to estimate the water depth at each mea-urement point by picking the time of the bottom reflections at eachrace and using the conductivity and permittivity data to calculate theadar pulse velocity. The GPR reflected signals were in a band cen-ered at 200 MHz, corresponding to a wavelength of about 16 cm,nd gave a depth resolution of about 5 cm. The bathymetric map inigure 3 shows that the depth of the riverbed increases from the eastoing toward the west riverbank.
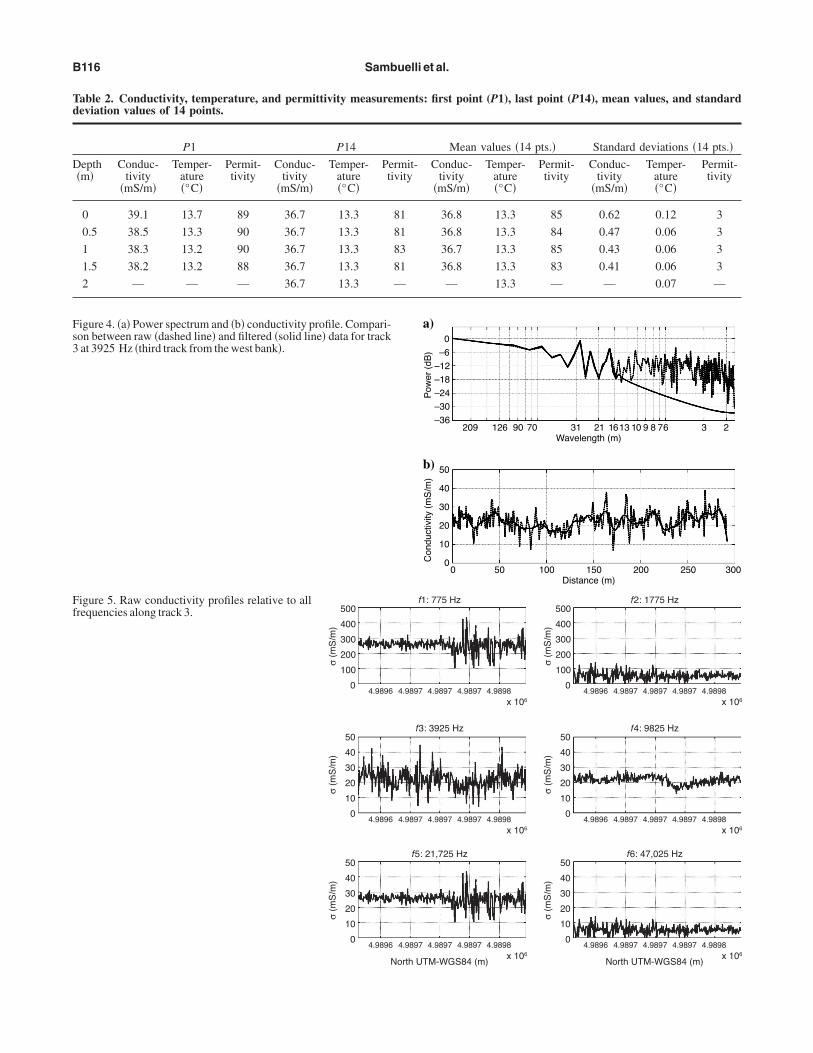
We downloaded the raw data logged by the GEM-2 usingeophex’s WinGEM software, obtaining an apparent conductivityrofile mS/m for each frequency along each survey track. On aver-ge, the raw data power spectra showed a decrease in energy contentelow 15 m. The profiles were then low-pass zero-phase filteredband-pass filter gain −1 dB at 15 m; reject-band filter gain =100 dB at 6.5 m to remove the highest spatial frequen-ies Figure 4. This processing was necessary because of the highnvironmental noise, which increased as the frequency droppedFigure 5.
The DOI of a handheld conductivity meter depends on many fac-ors: sensor sensitivity, precision, operating frequencies, ambient-oise level, target and host properties, and intercoil distance. Fol-owing the procedure in Huang 2005, we conducted an analysis tossess 1 the conditions of low induction number to check whichrequencies gave a quadrature response that could be converted intoonductivity data; 2 the capability of the selected frequencies to
able 1. Borehole B stratigraphy (see Figure 2 for boreholeocation).
epth m Geology
0–1.0 Topsoil
1.0–4.0 Sand, gravel, and pebbles
4.0–6.0 Coarse sand
6.0–11.0 Gravel and large pebbles
1.0–13.0 Hard 30- to 40-cm-thick conglomerates, alternatedwith loose gravel
3.0–13.5 Coarse gravel
3.5–15.0 Gravel and large pebbles
5.0–16.0 Gravel
6.0–17.0 Sand and gravel
7.0–23.0 Coarse sand and gravel, water table at 17 m Powater level
3.0–25.0 Gravel and semicohesive sand
5.0–26.5 Gravel and loose sand
6.5–28.0 Gravel
8.0–33.5 Gravel and pebbles lower part of the Holocenealluvium transgressive over the Miocene
3.5–63.0 Gray, compact clayey marl
3.0–67.0 Hard marl with scarce pebbles
Td
D
Fs3
Ff
B116 Sambuelli et al.
able 2. Conductivity, temperature, and permittivity measurements: first point (P1), last point (P14), mean values, and standardeviation values of 14 points.
P1 P14 Mean values 14 pts. Standard deviations 14 pts.epth
mConduc-
tivitymS/m
Temper-ature°C
Permit-tivity
Conduc-tivity
mS/m
Temper-ature°C
Permit-tivity
Conduc-tivity
mS/m
Temper-ature°C
Permit-tivity
Conduc-tivity
mS/m
Temper-ature°C
Permit-tivity
0 39.1 13.7 89 36.7 13.3 81 36.8 13.3 85 0.62 0.12 3
0.5 38.5 13.3 90 36.7 13.3 81 36.8 13.3 84 0.47 0.06 3
1 38.3 13.2 90 36.7 13.3 83 36.7 13.3 85 0.43 0.06 3
1.5 38.2 13.2 88 36.7 13.3 81 36.8 13.3 83 0.41 0.06 3
2 — — — 36.7 13.3 — — 13.3 — — 0.07 —
a)
Wavelength (m) P
ower
(dB
) 209 126 90 70 31 21 1613 10 9 8 76 3 2
0
–6
–12
–18
–24
–30
–36
b)
Distance (m)
Con
duct
ivity
(m
S/m
)
0 50 100 150 200 250 300
50
40
30
20
10
0
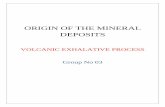
igure 4. a Power spectrum and b conductivity profile. Compari-on between raw dashed line and filtered solid line data for trackat 3925 Hz third track from the west bank.
f1: 775 Hz
σ (m
S/m
)
4.9896 4.9897 4.9897 4.9897 4.9898x 106
500
400
300
200
100
0
f2: 1775 Hz
σ (m
S/m
)
4.9896 4.9897 4.9897 4.9897 4.9898x 106
500
400
300
200
100
0
f5: 21,725 Hz
σ (m
S/m
)
4.9896 4.9897 4.9897 4.9897 4.9898x 106
50
40
30
20
10
0
f6: 47,025 Hz
North UTM-WGS84 (m) North UTM-WGS84 (m)
σ (m
S/m
)
4.9896 4.9897 4.9897 4.9897 4.9898x 106
50
40
30
20
10
0
f3: 3925 Hz
σ (m
S/m
)
4.9896 4.9897 4.9897 4.9897 4.9898x 106
50
40
30
20
10
0
f4: 9825 Hz
σ (m
S/m
)
4.9896 4.9897 4.9897 4.9897 4.9898x 106
50
40
30
20
10
0
igure 5. Raw conductivity profiles relative to allrequencies along track 3.
dcr
5a1wWssio2p4
qiHbscn
Gpmcir
to2
ws
Fnq21t
FamdctfMrt
Riverine deposits mapped by broadband EM B117
etect the river bottom sediment reliably, that is, the DOI; and 3 theapability to discriminate reliably among sediments having differentesistivity, i.e., sensitivity.
For this purpose, we conducted a set of simulations that spanned a00-Hz to 50-kHz frequency range with six frequencies per decade,water resistivity of 27 m, a 1- to 3-m water depth range, and a3.5- to 532-m sediment resistivity range. The latter two rangesere selected on the basis of the bathymetric and the geologic data.e conducted this analysis using the Anderson 1979 modeling
oftware. We obtained 25 synthetic apparent conductivities corre-ponding to five depths in the 1- to 3-m range, as well as five resistiv-ty values in the 13.5- to 532-m range using this simulation at eachf the following frequencies: 733.9; 1077.22; 3406; 10,772.2;3,208; and 50,000 Hz. We used these results to compare with ex-erimental data at, respectively, 775; 1175; 3925; 9825; 21,725; and7,025 Hz.
The apparent conductivity can be calculated only from theuadrature response of the conductivity meter when it operates at annduction number much lower than one McNeill, 1980. Moreover,uang and Won 2003 demonstrate that the induction number muste larger than 0.02; otherwise, the EM response is small and has amall dependence on the frequency. Therefore, it is possible to onlyonsider reliable those EM responses obtained when the inductionumber is included in the following range:
0.02 B =s
= i0
2s 1. 1
iven the GEM-2 intercoil spacing s = 1.66 m and the magneticermeability of free space 0 = 410−7 H/m, we calculated theean and standard deviation of the induction numbers relative to the
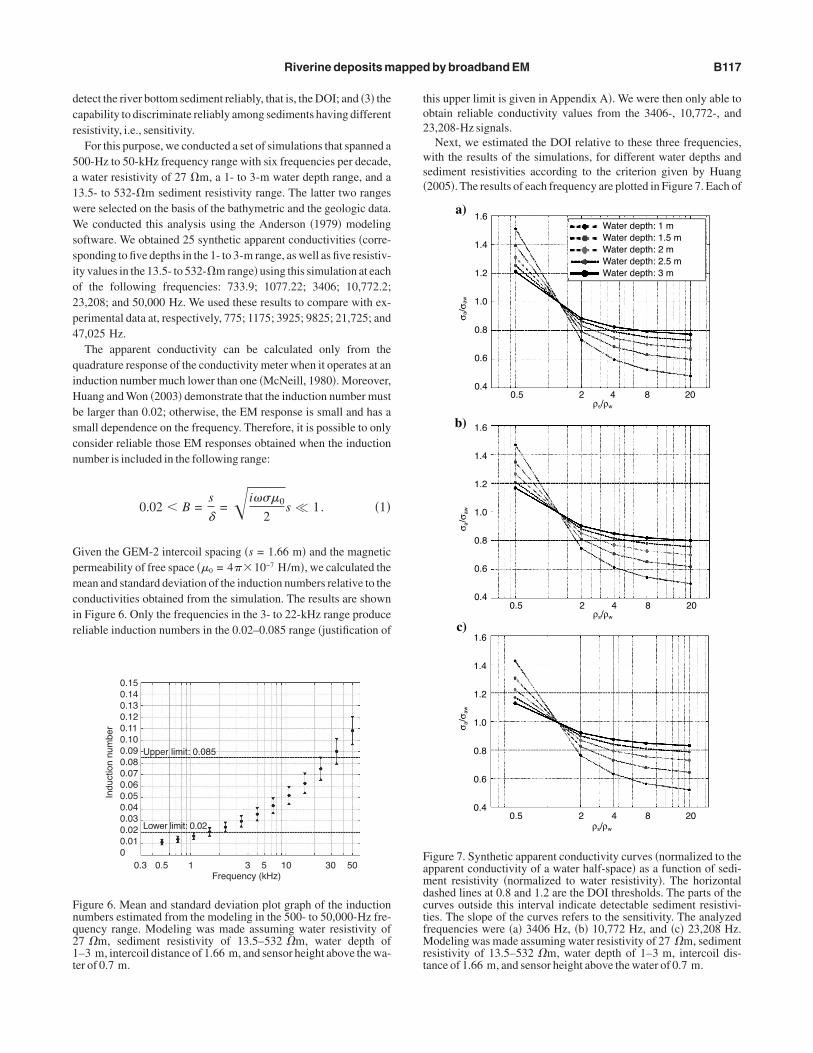
onductivities obtained from the simulation. The results are shownn Figure 6. Only the frequencies in the 3- to 22-kHz range produceeliable induction numbers in the 0.02–0.085 range justification of
Frequency (kHz)
Indu
ctio
n nu
mbe
r
0.3 0.5 1
Upper limit: 0.085
Lower limit: 0.02
3 5 10 30 50
0.15 0.14 0.13 0.12 0.11 0.10 0.09 0.08 0.07 0.06 0.05 0.04 0.03 0.02 0.01 0
igure 6. Mean and standard deviation plot graph of the inductionumbers estimated from the modeling in the 500- to 50,000-Hz fre-uency range. Modeling was made assuming water resistivity of7 m, sediment resistivity of 13.5–532 m, water depth of–3 m, intercoil distance of 1.66 m, and sensor height above the wa-er of 0.7 m.
his upper limit is given in Appendix A. We were then only able tobtain reliable conductivity values from the 3406-, 10,772-, and3,208-Hz signals.
Next, we estimated the DOI relative to these three frequencies,ith the results of the simulations, for different water depths and
ediment resistivities according to the criterion given by Huang2005. The results of each frequency are plotted in Figure 7. Each of
ρs/ρw
σ a/σ
aw
0.5 2 84 20
1.6
1.4
1.2
1.0
0.8
0.6
0.4
Water depth: 1 mWater depth: 1.5 mWater depth: 2 mWater depth: 2.5 mWater depth: 3 m
a)
ρs/ρw
σ a/σ
aw
0.5 2 84 20
1.6
1.4
1.2
1.0
0.8
0.6
0.4
b)
ρs/ρw
σ a/σ
aw
0.5 2 84 20
1.6
1.4
1.2
1.0
0.8
0.6
0.4
c)
igure 7. Synthetic apparent conductivity curves normalized to thepparent conductivity of a water half-space as a function of sedi-ent resistivity normalized to water resistivity. The horizontal
ashed lines at 0.8 and 1.2 are the DOI thresholds. The parts of theurves outside this interval indicate detectable sediment resistivi-ies. The slope of the curves refers to the sensitivity. The analyzedrequencies were a 3406 Hz, b 10,772 Hz, and c 23,208 Hz.
odeling was made assuming water resistivity of 27 m, sedimentesistivity of 13.5–532 m, water depth of 1–3 m, intercoil dis-ance of 1.66 m, and sensor height above the water of 0.7 m.

totraAopd—s
ttTc
t3lmcotocemib
mbtt2ao
mpmi
wa
Tf
wcf
tesmatds
Tb
3l12im
ctmt
FTp
B118 Sambuelli et al.
he views plots the ratio of the apparent conductivity of a water layerver sediments a to the apparent conductivity of an indefinite wa-er layer aw versus the ratio of the sediment resistivity s to the wateresistivity w. The two horizontal lines represent the 20% thresholds,nd the curved lines represent a/aw at five different water depths.ccording to the results of these simulations, if we accept a thresh-ld value of 20% — i.e., we can detect a sediment if the measured ap-arent conductivity differs by more than 20% from the apparent con-uctivity one would have measured above water alone a/aw = 1
then the following considerations can be drawn concerning theensitivity and the DOI.
All of the graphs show there is quite a low sensitivity to the resis-ivity of the sediments, particularly if the sediments are more resis-ive than the water the curves have a very weak slope when s w.he sensitivity grows as the frequency and the riverbed depth de-rease.
We obtained only a very rough capability to discriminate be-ween coarse 100 m and finer 100 m sediments from the406-Hz signal down to a depth of 2.5 m. When the water depth wasower than 1.5 m, we were also able to discriminate between sedi-
ents with different resistivities. We obtained only a very roughapability to discriminate between coarse 100 m and finer100 m sediments from the 10,772-Hz signal down to a depthf 2 m. When the water depth was lower than 1 m, we were also ableo discriminate between sediments with different resistivities. Webtained only a very rough capability to discriminate betweenoarse 100 m and finer 100 m sediments from the high-st frequency 23,208 Hz down to a depth of 1 m, which was theinimum water depth we encountered in the survey. This means the
nformation carried by this latter signal is mainly relative to theathymetry.
4989850
4989800
4989750
4989700
4989650
4989600
400
300
200
100
East UTM WGS-84 (m)
Nor
th U
TM
WG
S-8
4 (m
)
396600
79
10
11
12
65
4
3
8Ωm
21
396650 396700 396750
igure 8. Resistivity map at 3925 Hz, after bathymetry correction.he circles 1–12 refer to the river-bottom sampling points. Onlyoints with a water depth of less than 2.5 m were considered.
The results of the simulations showed that information on sedi-ent resistivity could be drawn from the 3406-Hz signals only if
oth the water depth were lower than 2.5 m and the sediment resis-ivity were higher than 100 m. Information could be drawn fromhe 10,772-Hz signals only if both the water depth were lower than.0 m and the sediment resistivity were higher than 100 m. To an-lyze a larger area and more reliable data, we only focused attentionn the 3925-Hz experimental data.
As suggested by Butler et al. 2004, we then made an approxi-ate bathymetric correction on the whole investigated area. We hy-
othesized a two-layer model water-sediment to estimate the sedi-ent resistivity. The apparent conductivity a a of a two-layer model
s McNeill, 1980
a = 11 − RvZ + 2RvZ , 2
here Z = z/s is the actual depth divided by the intercoil spacing snd RvZ is
RvZ =1
4Z2 + 1. 3
he value for RvZ is the cumulative response of the mathematicalunction SvZ:
SvZ =4Z
4Z2 + 13, 4
hich describes, for vertical magnetic dipole setting, the relativeontribution to the secondary magnetic field, measured at the sur-ace, resulting from a thin horizontal layer at any given depth z.
Because both GPR and GEM2 measurements were referenced inhe UTM-WGS84 absolute coordinate system, it was possible to pairach point where apparent conductivity was measured with the re-pective water depth zw and to calculate Zw = zw/s. As reported, weeasured the true water conductivity with the conductivity meter
nd obtained an average value w = 37 mS/m. Then, we calculatedhe conductivity of the second layer, which corresponds to the con-uctivity of the bottom sediment sed, considered as a semi-infinitepace at each point of the survey:
sed =a − 1 − RvZww
RvZw. 5
he effect of the water layer was removed through by applying theathymetric correction.
RESULTS
We plotted a map Figure 8 of the sediment resistivity at925 Hz, discarding the data deeper than 2.5 m and with resistivityower than 100 m. The most frequent resistivity value was20 m, and 75% of the resistivity values were between 100 and40 m. These data suggest quite a large homogeneity of the depos-ts, which mainly consist of saturated gravel with pebbles in a sandy
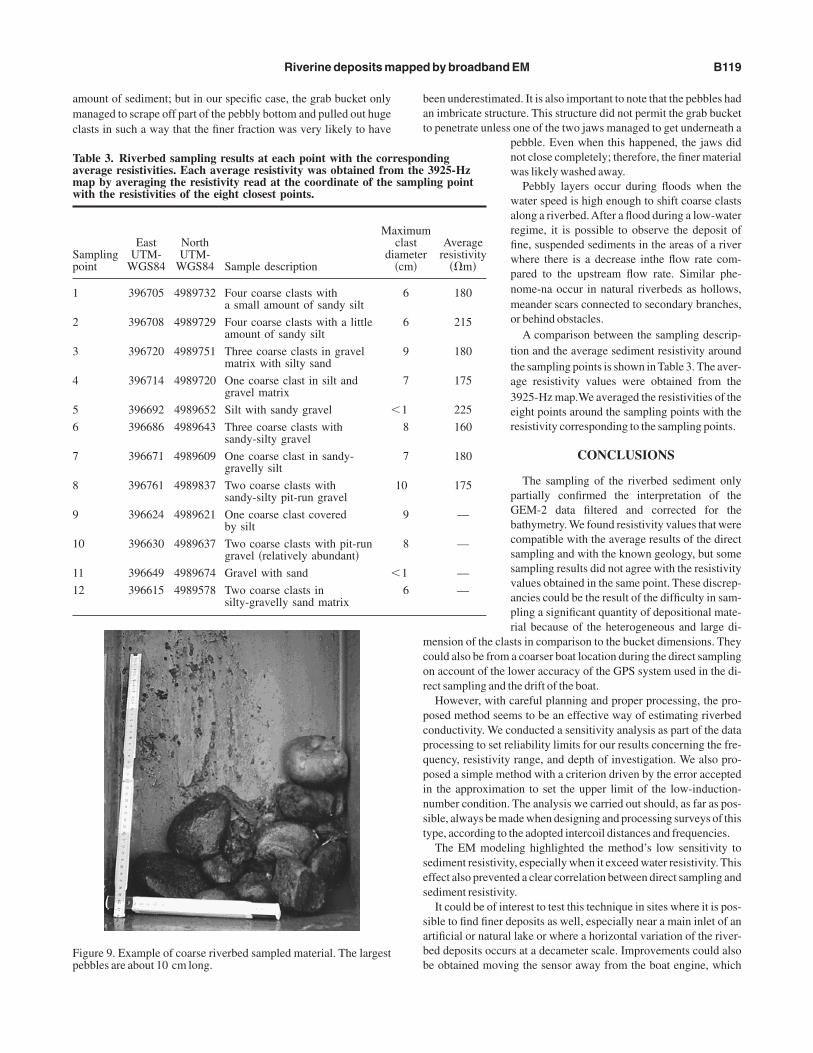
atrix; the latter can be prevalent in a lower-resistivity area.As shown in Table 3, the top of the riverbed in the surveyed area
onsists of pebbles and coarse gravel alluvia in a sand-silt matrixFigure 9. From a careful observation of the samples, it emerges thathe alluvia usually are covered by a thin, blackish silt film approxi-
ately 1–2 cm that is rich in organic matter. In the presence of ahicker silt film, it would have been possible to sample a larger
amc
bat
mcor
pcpqpinst
ses
sabb
Tamw
Sp
1
2
3
4
5
6
7
8
9
1
1
1
Fp
Riverine deposits mapped by broadband EM B119
mount of sediment; but in our specific case, the grab bucket onlyanaged to scrape off part of the pebbly bottom and pulled out huge
lasts in such a way that the finer fraction was very likely to have
able 3. Riverbed sampling results at each point with the corverage resistivities. Each average resistivity was obtained froap by averaging the resistivity read at the coordinate of theith the resistivities of the eight closest points.
amplingoint
EastUTM-
WGS84
NorthUTM-
WGS84 Sample description
M
d
396705 4989732 Four coarse clasts witha small amount of sandy silt
396708 4989729 Four coarse clasts with a littleamount of sandy silt
396720 4989751 Three coarse clasts in gravelmatrix with silty sand
396714 4989720 One coarse clast in silt andgravel matrix
396692 4989652 Silt with sandy gravel
396686 4989643 Three coarse clasts withsandy-silty gravel
396671 4989609 One coarse clast in sandy-gravelly silt
396761 4989837 Two coarse clasts withsandy-silty pit-run gravel
396624 4989621 One coarse clast coveredby silt
0 396630 4989637 Two coarse clasts with pit-rungravel relatively abundant
1 396649 4989674 Gravel with sand
2 396615 4989578 Two coarse clasts insilty-gravelly sand matrix
igure 9. Example of coarse riverbed sampled material. The largestebbles are about 10 cm long.
een underestimated. It is also important to note that the pebbles hadn imbricate structure. This structure did not permit the grab bucketo penetrate unless one of the two jaws managed to get underneath a
pebble. Even when this happened, the jaws didnot close completely; therefore, the finer materialwas likely washed away.
Pebbly layers occur during floods when thewater speed is high enough to shift coarse clastsalong a riverbed.After a flood during a low-waterregime, it is possible to observe the deposit offine, suspended sediments in the areas of a riverwhere there is a decrease inthe flow rate com-pared to the upstream flow rate. Similar phe-nome-na occur in natural riverbeds as hollows,meander scars connected to secondary branches,or behind obstacles.
A comparison between the sampling descrip-tion and the average sediment resistivity aroundthe sampling points is shown in Table 3. The aver-age resistivity values were obtained from the3925-Hz map.We averaged the resistivities of theeight points around the sampling points with theresistivity corresponding to the sampling points.
CONCLUSIONS
The sampling of the riverbed sediment onlypartially confirmed the interpretation of theGEM-2 data filtered and corrected for thebathymetry. We found resistivity values that werecompatible with the average results of the directsampling and with the known geology, but somesampling results did not agree with the resistivityvalues obtained in the same point. These discrep-ancies could be the result of the difficulty in sam-pling a significant quantity of depositional mate-rial because of the heterogeneous and large di-
ension of the clasts in comparison to the bucket dimensions. Theyould also be from a coarser boat location during the direct samplingn account of the lower accuracy of the GPS system used in the di-ect sampling and the drift of the boat.
However, with careful planning and proper processing, the pro-osed method seems to be an effective way of estimating riverbedonductivity. We conducted a sensitivity analysis as part of the datarocessing to set reliability limits for our results concerning the fre-uency, resistivity range, and depth of investigation. We also pro-osed a simple method with a criterion driven by the error acceptedn the approximation to set the upper limit of the low-induction-umber condition. The analysis we carried out should, as far as pos-ible, always be made when designing and processing surveys of thisype, according to the adopted intercoil distances and frequencies.
The EM modeling highlighted the method’s low sensitivity toediment resistivity, especially when it exceed water resistivity. Thisffect also prevented a clear correlation between direct sampling andediment resistivity.
It could be of interest to test this technique in sites where it is pos-ible to find finer deposits as well, especially near a main inlet of anrtificial or natural lake or where a horizontal variation of the river-ed deposits occurs at a decameter scale. Improvements could alsoe obtained moving the sensor away from the boat engine, which
ding3925-Hz
ling point
Averageresistivity
m
180
215
180
175
225
160
180
175
—
—
—
—
responm thesamp
aximumclast
iametercm
6
6
9
7
1
8
7
10
9
8
1
6
co
cwmwptG
smdGmg
natcf
4c
wis
T
Wi
WAo
A
B
B
D
H
H
M
T
W
W
Fbcde
B120 Sambuelli et al.
ould result in a better signal-to-noise ratio but also in a larger spreadf the equipment and more difficult positioning.
The GPS measurements were very useful, as they ensured smoothomparisons and overlaps between the GEM-2 and GPR responses,hich was crucial to perform the bathymetric correction. Further-ore, the RTK mode made it possible for us to obtain the coordinatesith centimetric accuracy in real time, allowing the location ofunctual measurements, taken with the conductivity meter, near theracks followed during the continuous measurements GPR andEM-2.
ACKNOWLEDGMENTS
The authors thank the Reale Società Canottieri Cerea of Turin forupplying the boat and the steersman, Alberto Godio for the TDReasurements and fruitful discussions, Stefano Stocco for the con-
uctivity meter measurements, Emanuele Pesenti for help in thePS operations, and Hydrodata S.p.A. for sampling the bottom sedi-ents. The authors also thank the reviewers, whose observations
reatly improved the manuscript.
APPENDIX A
JUSTIFICATION OF THE SELECTEDUPPER LIMIT OF THE LOW-INDUCTION-
NUMBER CONDITION
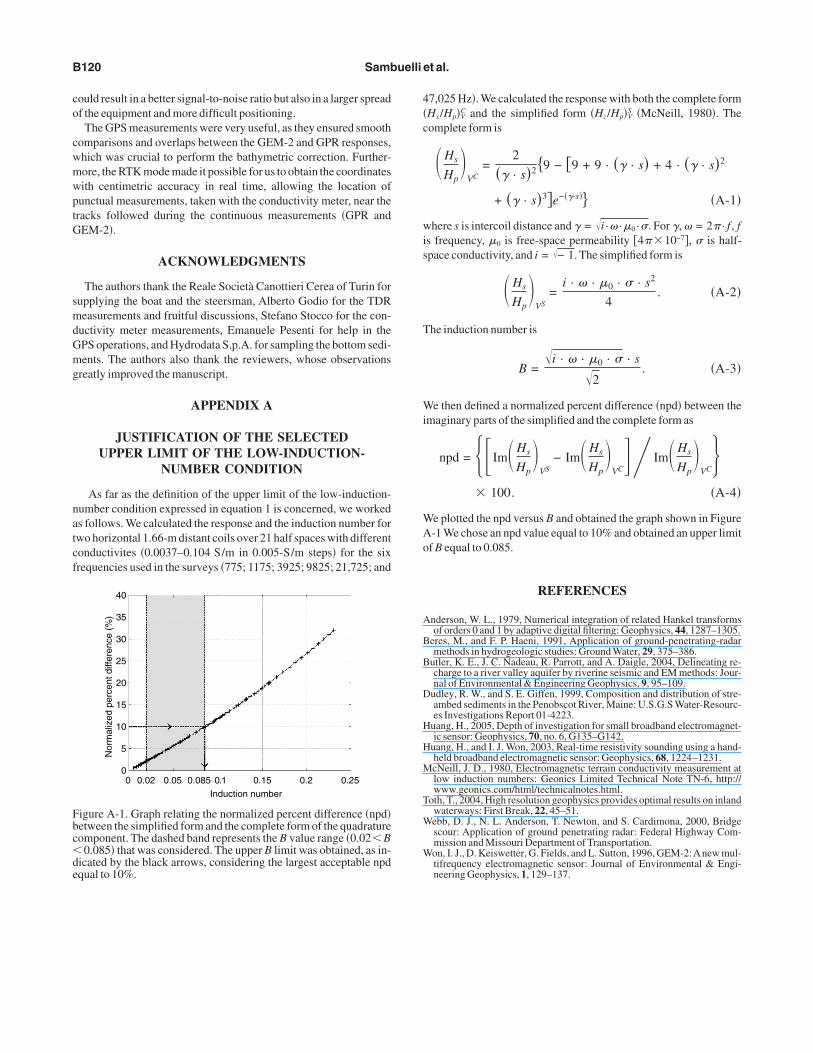
As far as the definition of the upper limit of the low-induction-umber condition expressed in equation 1 is concerned, we workeds follows. We calculated the response and the induction number forwo horizontal 1.66-m distant coils over 21 half spaces with differentonductivites 0.0037–0.104 S/m in 0.005-S/m steps for the sixrequencies used in the surveys 775; 1175; 3925; 9825; 21,725; and
40
35
30
25
20
15
10
5
0
Induction number
Nor
mal
ized
per
cent
diff
eren
ce (
%)
0 0.02 0.05 0.085 0.1 0.15 0.2 0.25
igure A-1. Graph relating the normalized percent difference npdetween the simplified form and the complete form of the quadratureomponent. The dashed band represents the B value range 0.02B0.085 that was considered. The upper B limit was obtained, as in-
icated by the black arrows, considering the largest acceptable npd
qual to 10%.7,025 Hz. We calculated the response with both the complete formHx/HpV
C and the simplified form Hz/HpVS McNeill, 1980. The
omplete form is
Hs
Hp
VC=
2
· s29 − 9 + 9 · · s + 4 · · s2
+ · s3e−·s A-1
here s is intercoil distance and = i · ·0 ·. For , = 2 · f , fs frequency, 0 is free-space permeability 410−7, is half-pace conductivity, and i = − 1. The simplified form is
Hs
Hp
VS=
i · · 0 · · s2
4. A-2
he induction number is
B =i · · 0 · · s
2. A-3
e then defined a normalized percent difference npd between themaginary parts of the simplified and the complete form as
npd = ImHs
Hp
VS− ImHs
Hp
VC ImHs
Hp
VC
100. A-4
e plotted the npd versus B and obtained the graph shown in Figure-1 We chose an npd value equal to 10% and obtained an upper limitf B equal to 0.085.
REFERENCES
nderson, W. L., 1979, Numerical integration of related Hankel transformsof orders 0 and 1 by adaptive digital filtering: Geophysics, 44, 1287–1305.
eres, M., and F. P. Haeni, 1991, Application of ground-penetrating-radarmethods in hydrogeologic studies: Ground Water, 29, 375–386.
utler, K. E., J. C. Nadeau, R. Parrott, and A. Daigle, 2004, Delineating re-charge to a river valley aquifer by riverine seismic and EM methods: Jour-nal of Environmental & Engineering Geophysics, 9, 95–109.
udley, R. W., and S. E. Giffen, 1999, Composition and distribution of stre-ambed sediments in the Penobscot River, Maine: U.S.G.S Water-Resourc-es Investigations Report 01-4223.
uang, H., 2005, Depth of investigation for small broadband electromagnet-ic sensor: Geophysics, 70, no. 6, G135–G142.
uang, H., and I. J. Won, 2003, Real-time resistivity sounding using a hand-held broadband electromagnetic sensor: Geophysics, 68, 1224–1231.cNeill, J. D., 1980, Electromagnetic terrain conductivity measurement atlow induction numbers: Geonics Limited Technical Note TN-6, http://www.geonics.com/html/technicalnotes.html.
oth, T., 2004, High resolution geophysics provides optimal results on inlandwaterways: First Break, 22, 45–51.ebb, D. J., N. L. Anderson, T. Newton, and S. Cardimona, 2000, Bridgescour: Application of ground penetrating radar: Federal Highway Com-mission and Missouri Department of Transportation.on, I. J., D. Keiswetter, G. Fields, and L. Sutton, 1996, GEM-2:Anew mul-tifrequency electromagnetic sensor: Journal of Environmental & Engi-
neering Geophysics, 1, 129–137.