
Reliability-Based Design Optimization of Structures Using ...
20
applied sciences Article Reliability-Based Design Optimization of Structures Using Complex-Step Approximation with Sensitivity Analysis Junho Chun Citation: Chun, J. Reliability-Based Design Optimization of Structures Using Complex-Step Approximation with Sensitivity Analysis. Appl. Sci. 2021, 11, 4708. https://doi.org/ 10.3390/app11104708 Academic Editor: Sang-Hyo Kim Received: 5 April 2021 Accepted: 15 May 2021 Published: 20 May 2021 Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affil- iations. Copyright: © 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https:// creativecommons.org/licenses/by/ 4.0/). School of Architecture, Syracuse University, Syracuse, NY 13203, USA; [email protected] Abstract: Structural optimization aims to achieve a structural design that provides the best perfor- mance while satisfying the given design constraints. When uncertainties in design and conditions are taken into account, reliability-based design optimization (RBDO) is adopted to identify solutions with acceptable failure probabilities. This paper outlines a method for sensitivity analysis, reliability assessment, and RBDO for structures. Complex-step (CS) approximation and the first-order reliability method (FORM) are unified in the sensitivity analysis of a probabilistic constraint, which streamlines the setup of optimization problems and enhances their implementation in RBDO. Complex-step approximation utilizes an imaginary number as a step size to compute the first derivative without subtractive cancellations in the formula, which have been observed to significantly affect the accuracy of calculations in finite difference methods. Thus, the proposed method can select a very small step size for the first derivative to minimize truncation errors, while achieving accuracy within the machine precision. This approach integrates complex-step approximation into the FORM to compute sensitivity and assess reliability. The proposed method of RBDO is tested on structural optimization problems across a range of statistical variations, demonstrating that performance benefits can be achieved while satisfying precise probabilistic constraints. Keywords: reliability-based design optimization; sensitivity analysis; complex-step approximation 1. Introduction Structural systems operate in variable and uncertain environments that impact build- ing performance and integrity. While maintaining a satisfactory level of safety and reliabil- ity, structural systems are expected to satisfy their design criteria, such as performance and serviceability. Uncertainties and tolerances are commonly present and even anticipated during the design process and construction. The prediction of building response to these events has a crucial role in the design and optimization of structures. In the optimal design of structural systems, variations in the material, loads, and parameters of a structure are random variables with a certain probability distribution rather than fixed coefficients. With the existence of such uncertainties, the problem of reliability analysis and its reflection must be addressed during the design process of structures. The inclusion of reliability analysis within the design process could drastically reduce the total cost of development and the risk of failure. Structural design optimization can be viewed as a process that methodically searches for improved engineering solutions and designs while considering requirements and constraints that exist in the field. In deterministic design optimization (DDO) [1], the uncertainties of a structural system, such as material properties, forces, models, and sizes, are taken into account subjectively and indirectly, by means of safety factors or load com- binations with coefficients specified in the design codes. The procedures of deterministic design optimization consider the effects of uncertainties in a qualitative way, without incor- poration of quantitative characterization of the probabilistic nature of system and design. Non-deterministic optimization has emerged as an alternative form to accurately model the safety-under-uncertainty aspect of the optimization problem. Methods for considering Appl. Sci. 2021, 11, 4708. https://doi.org/10.3390/app11104708 https://www.mdpi.com/journal/applsci
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Reliability-Based Design Optimization of Structures Using ...

applied sciences
Article
Reliability-Based Design Optimization of Structures UsingComplex-Step Approximation with Sensitivity Analysis
Junho Chun
Citation: Chun, J. Reliability-Based
Design Optimization of Structures
Using Complex-Step Approximation
with Sensitivity Analysis. Appl. Sci.
2021, 11, 4708. https://doi.org/
10.3390/app11104708
Academic Editor: Sang-Hyo Kim
Received: 5 April 2021
Accepted: 15 May 2021
Published: 20 May 2021
Publisher’s Note: MDPI stays neutral
with regard to jurisdictional claims in
published maps and institutional affil-
iations.
Copyright: © 2021 by the author.
Licensee MDPI, Basel, Switzerland.
This article is an open access article
distributed under the terms and
conditions of the Creative Commons
Attribution (CC BY) license (https://
creativecommons.org/licenses/by/
4.0/).
School of Architecture, Syracuse University, Syracuse, NY 13203, USA; [email protected]
Abstract: Structural optimization aims to achieve a structural design that provides the best perfor-mance while satisfying the given design constraints. When uncertainties in design and conditionsare taken into account, reliability-based design optimization (RBDO) is adopted to identify solutionswith acceptable failure probabilities. This paper outlines a method for sensitivity analysis, reliabilityassessment, and RBDO for structures. Complex-step (CS) approximation and the first-order reliabilitymethod (FORM) are unified in the sensitivity analysis of a probabilistic constraint, which streamlinesthe setup of optimization problems and enhances their implementation in RBDO. Complex-stepapproximation utilizes an imaginary number as a step size to compute the first derivative withoutsubtractive cancellations in the formula, which have been observed to significantly affect the accuracyof calculations in finite difference methods. Thus, the proposed method can select a very smallstep size for the first derivative to minimize truncation errors, while achieving accuracy within themachine precision. This approach integrates complex-step approximation into the FORM to computesensitivity and assess reliability. The proposed method of RBDO is tested on structural optimizationproblems across a range of statistical variations, demonstrating that performance benefits can beachieved while satisfying precise probabilistic constraints.
Keywords: reliability-based design optimization; sensitivity analysis; complex-step approximation
1. Introduction
Structural systems operate in variable and uncertain environments that impact build-ing performance and integrity. While maintaining a satisfactory level of safety and reliabil-ity, structural systems are expected to satisfy their design criteria, such as performance andserviceability. Uncertainties and tolerances are commonly present and even anticipatedduring the design process and construction. The prediction of building response to theseevents has a crucial role in the design and optimization of structures. In the optimal designof structural systems, variations in the material, loads, and parameters of a structure arerandom variables with a certain probability distribution rather than fixed coefficients. Withthe existence of such uncertainties, the problem of reliability analysis and its reflectionmust be addressed during the design process of structures. The inclusion of reliabilityanalysis within the design process could drastically reduce the total cost of developmentand the risk of failure.
Structural design optimization can be viewed as a process that methodically searchesfor improved engineering solutions and designs while considering requirements andconstraints that exist in the field. In deterministic design optimization (DDO) [1], theuncertainties of a structural system, such as material properties, forces, models, and sizes,are taken into account subjectively and indirectly, by means of safety factors or load com-binations with coefficients specified in the design codes. The procedures of deterministicdesign optimization consider the effects of uncertainties in a qualitative way, without incor-poration of quantitative characterization of the probabilistic nature of system and design.Non-deterministic optimization has emerged as an alternative form to accurately modelthe safety-under-uncertainty aspect of the optimization problem. Methods for considering
Appl. Sci. 2021, 11, 4708. https://doi.org/10.3390/app11104708 https://www.mdpi.com/journal/applsci
Appl. Sci. 2021, 11, 4708 2 of 20
uncertainty in the optimal design process can be categorized into two groups. Reliability-based design optimization (RBDO) aims to meet a specific target failure probability forobjectives and/or constraint functions that include uncertainty parameters. Robust designoptimization (RDO), on the other hand, minimizes the sensitivity of the objectives andconstraints to the uncertainty design parameters.
The growing interest in the identification of feasible, reliable, and robust solutions instructural design optimization has led to significant advances in theoretical and numericaldevelopments, such as simulation and analysis approaches and optimization algorithms.Sandren and Cameron [2] proposed a robust design optimization method for structureswith considerations of parameter variation and sensitivity to variation by using genetic andnon-linear programming algorithms. Marano et al. [3] developed a robust optimal designcriterion for a tuned mass damper device under random vibrations. The robustness ofoptimal solutions was obtained by solving a multi-objective optimization problem in whichthe mean and standard deviations of the deterministic objection were minimized. A robustdesign of a vibration absorber under uncertainties in mass and stiffness of the dynamicsystem was utilized to demonstrate the robust design approach by Zang et al. [4]. Robustdesign optimization was performed by a direct first-order perturbation method based on aTaylor expansion. The development of nonlinear programming-based RDO [5–7] in variousfields with diverse applications and a thorough review of RDO methods are illustrated inthe literature, e.g., by Messac and Ismail-Yahaya [8], as well as Zhang et al. [4].
In RBDO, a design at each iteration step is checked to determine whether it satisfiesprobabilistic constraints by reliability analysis, which requires repetitive computationalefforts [9]. To assess the probabilistic constraints in RBDO, various methods have beendeveloped [10,11]. The reliability index approach (RIA) [9] and its inverse, the performancemeasure approach (PMA) [10,12], utilize the first-order reliability method (FORM) [13] forreliability analysis. RBDO is performed using a nested approach, such that each iteration inthe design optimization process involves a sub-loop of iterations for reliability assessmentat the current stage of design. This is often called a “double-loop” approach because eachstep of the optimization process involves another iteration for the reliability analysis [13].As a result of the repeated iteration process, the computational cost associated with theutilization of the double-loop approach can prohibitively be expensive. To improve thecomputational efficiency of reliability analysis and optimization procedure, many RBDOapproaches, such as decoupling [14,15] and single-loop (SL) methods [16–20], have beenproposed. The decoupling method decouples the RBDO procedure by constructing asequence of cycles with deterministic optimization followed by the reliability analysis ofthe converged solution in the feasible domain. The SL approach is based on the Karush–Kuhn–Tucker (KKT) optimality conditions to approximate the solution of the sub-loopoptimization. As a result, the sub-loop for reliability analysis is replaced by a deterministicconstraint, which transforms a double-loop RBDO problem into an equivalent single-loop optimization problem. RBDO methods have been applied to many fields, includingstructural engineering [17,21], mechanical engineering [22,23], aerospace engineering [24],and material science [25]. A comprehensive review on RBDO can be found in the work ofSong et al. [26], Frangopol and Maute [27], and Tsompanakis et al. [28].
In DDO, RDO, and RBDO, sensitivity analysis of probabilistic constraints is crucial tothe utilization of efficient optimization algorithms. The dependence on reliability with re-spect to the design inputs or values can be evaluated using sensitivity analysis. There havebeen multiple approaches in sensitivity analysis, such as Monte Carlo Simulation-basedapproaches [29,30], and simulation-based methods [31,32]. However, these approachesgenerally require high computational power that might restrict their applicability, espe-cially when sensitivity analysis needs to be performed with respect to many parameters.The difficulty of sensitivity analysis increases when the underlying functions and modelsare complex, or the analytical derivation of gradients is not feasible due to the implicitsystem. In this paper, the sensitivity analysis of failure probability, a probabilistic con-straint of RBDO, is proposed using complex-step (CS) approximation integrated with

Appl. Sci. 2021, 11, 4708 3 of 20
the FORM. Li [33] showed sensitivity analysis in the FORM-based RBDO using the CS.This paper provides details on the general integration of CS in the FORM and discussesuniform applicability to structural RBDO. The sensitivity analysis is performed using avery small complex value, such that the outcome is not significantly affected by a selec-tion of steps, unlike the finite difference method. In addition, the proposed method canbe easily implemented in RBDO and is free from round-off and subtractive cancellationerrors when compared with the finite difference method. Furthermore, sensitivity analysisand assessment of the failure probability can be simultaneously performed using the CSapproximation simply by taking real and imaginary parts of numerical results so thatcomputational efficiency in analysis and optimization increases. This paper presents theRBDO method utilizing the FORM and presents a sensitivity analysis of probabilisticconstraints with respect to design and random variable parameters to use a gradient-basedoptimization algorithm.
2. Reliability Analysis and Reliability-Based Design Optimization2.1. Reliability Analysis Using the First-Order Reliability Method
The time-invariant reliability problem can be characterized by an n-vector of randomvariables x = (x1, x2, x3, . . . , xn)
T and the subset Ω of their outcome space, which definesthe failure events of the limit-state function g(x). The failure probability Pf is given by then-fold integral
Pf = P(x ∈ Ω ≡ g(x) ≤ 0) =∫
g(x)≤0 k(x)dx (1)
where k(x) is the joint probability density function (PDF) of x. By transforming the randomvariables into the standard normal space (u = T(x)), the failure probability integral can bewritten as
Pf =∫
G(u)≤0 ϕn(u)du (2)
where G(u) is the limit-state function transformed from the original space into the standardnormal space and ϕn(·) is the n-variate standard normal density function for the randomvector. The component reliability problem utilizes a reliability method to compute thefailure probability. The FORM linearizes the limit-state function G(u) at a point u*, whichis obtained by solving a constraint optimization problem as
arg minu∗
‖u‖ |G(u) = 0 (3)
The point u* indicates a location in the linearized limit-state function, in which thedistance from the origin in the standard normal space is the minimum. This point iscommonly known as the “design point” or “most probable point” (MPP). The linearizedlimit-state function is written as
G(u) = ∇G(u∗)(u− u∗) (4)
where ∇G(u∗) =(
∂u∗1G, ∂u∗2
G, . . . , ∂u∗n G)
denotes the gradient row vector. The lineariza-tion represents the failure domain G(u) ≤ 0, that is, the half-space defined by β−αu ≤ 0.β = αu∗ is the reliability index and α = − ∇G(u∗)
‖∇G(u∗)‖ denotes the normalized negative vectorat the design point (refer to Figure 1). This representation leads to
G(u) = ‖∇G(u∗)‖(β− αu) (5)

Appl. Sci. 2021, 11, 4708 4 of 20
Figure 1. Illustration of the first-order reliability method (FORM) for a component reliability problem.
The probability content of the half-space, which is defined by the reliability index,gives the approximation of the failure probability as
Pf ≈ Φ(−β) (6)
where Φ(·) denotes the cumulative distribution function (CDF) of the standard normaldistribution.
It should be noted that there are various algorithms for approximation of the designpoint in Equation (3) and the reliability index [34,35]. The accuracy of the FORM dependsupon how well the actual limit-state surface is represented by the linear approximation. Fornonlinear limit-state functions having a larger number of random variables, the FORM maynot identify accurate design points or encounter a convergence issue while searching forthe most probable points for complex systems. The nonlinearity of the limit-state surface iscaused by various factors, such as the nonlinear relationship between random variablesand the transformation of random variables from the original space to standard normalspace. The second-order reliability method (SORM) [13,36,37] can improve the assessmentgiven by FORM by including information about the curvature. The SORM approximatesthe limit-state surface by using a hyper-paraboloid with tangent hyperplane and maincurvatures at the design point. Furthermore, Der Kiureghian and Dakessian [38] showedthat a limit-state function might have multiple design points. An optimization algorithmutilized to solve Equation (3) may converge to a local design point that results in a grossapproximation error. Several search algorithms [38–40] integrating multiple design pointshave been proposed as an effort to improve the accuracy of reliability analysis.
2.2. Reliability-Based Design Optimization
One of the goals in structural optimization is to find the optimal solutions in a givendesign domain subjected to tractions and displacement boundary conditions while satisfy-ing given design constraints. When the reliability analysis of a structure under uncertaintyis incorporated into structural optimization, it is referred to as RBDO. RBDO aims to achievethe optimal design under given probabilistic constraints, arising from uncertainties in ma-terial properties or loads. The component RBDO (CRBDO) approach seeks to satisfy theprobabilistic constraint regarding each failure event. A CRBDO problem can be formulated as
mind,µx
fobj(d,µx)
s.t. Pf i = P[gi(d, x) ≤ 0] ≤ Pf it, i = 1, . . . , nc
dl ≤ d ≤ du
(7)

Appl. Sci. 2021, 11, 4708 5 of 20
where fobj is the objective function; d is a vector of deterministic design variables; µx isthe vector of the means of random variable x; P[gi(d, x) ≤ 0] is the failure probability ofthe i-th limit-state function gi(·); Pf i
t represents the target failure probability of the i-thlimit-state; nc is the number of probabilistic constraints; and dl and du are the lower boundsof design variables and upper bounds of design variables, respectively. This problem issolved by generating and solving a sequence of explicit subproblems that are approxima-tions of Equation (7). Optimization algorithms, such as sequential linear programming(SLP), sequential quadratic programming (SQP; [41]), convex linearization (COLIN; [42]),optimality criteria (OC; [43]), and method of moving asymptotes (MMA; [44]), incorporateinformation about the sensitivity of objective and probabilistic constraint functions to solvesubproblems.
2.3. Sensitivity Analysis
Sensitivity analysis of the probabilistic constraint aims to evaluate the dependence ofreliability on design parameters or random variables. To utilize an efficient gradient-basedoptimization algorithm in RBDO, sensitivity analysis is integral. The sensitivity of thefailure probability with respect to the design parameter d [45] can be computed by a chainrule as
∇dPf =dPf
dβ(d,x∗) ·∇dβ(d, x∗) = dΦ(−β)dβ(d,x∗) ·∇dβ(d, x∗) = −ϕ(β)·∇dβ(d, x∗) (8)
where∇dβ(d, x∗) = 1
‖∇G(d,u∗)‖ ·∇dg(d, x∗) (9)
Similarly, the sensitivity of the probability approximation with respect to a set ofdistribution parameters θ, such as the mean and standard deviation, is obtained from
∇θPf =dPf
dβ(d,x∗) ·∇θβ(d, x∗) = dΦ(−β)dβ(d,x∗) ·∇θβ(d, x∗) = −ϕ(β)·∇θβ(d, x∗) (10)
where∇θβ(d, x∗) = αJu,θ(x
∗, θ) (11)
where Ju,θ is the Jacobian of the θ to u transformation.
3. Complex-Step Approximation and Finite Difference Method
The complex-step (CS) derivative method [46] was introduced by Squire and Trapp [47]and has been proven to be more efficient for the first-order derivative calculation thanthe conventional finite difference method [48]. In the CS derivative approximation, animaginary number multiplied by the step size h is utilized. The first derivative is approxi-mated by a single function evaluation with it. To derive the CS derivative and identify itsassociated errors, consider the differentiable function f (·) and the point y on the real axis(y ∈ R). The Taylor series expansion of f (y + ih) gives
f (y + ih) ≈ f (y) + ih f ′(y)− h2
2! f (2)(y)− i h3
3! f (3)(y) + h4
4! f (4)(y) + . . . (12)
where i is the imaginary unit. Rearranging Equation (12) and taking the imaginary part ofboth sides yield
f ′(y) ≈ =[ f (y+ih)]h + O
(h2) (13)
where =[·] denotes the imaginary part of the function f. When a small h is selected, termswith the order h2 and higher can be truncated. Evaluating the function f at the imaginaryargument y + ih, and dividing it by h gives an approximation to the first derivative. TheCS approximation in Equation (13) does not cause subtractive cancellation and results incalculations without the associated round-off error. Note that the real part of Equation (13)multiplied by h is equal to f (y). Therefore, the first derivative approximation and functionvalue can be computed simultaneously, which will result in increased computational

Appl. Sci. 2021, 11, 4708 6 of 20
efficiency for analysis and optimization. The level of accuracy in the first derivative usingthe conventional finite difference method can vary with a change in the step size, which isgenerally selected arbitrarily. This level indicates that the actual effect of the step size in thefinite difference method on the result makes it difficult to predict prior to actual calculation.It is noteworthy that sensitivity analysis using the CS approximation simply requiresthe evaluation of the function with a complex variable without analytical derivations ofgradients. Therefore, the CS approximation allows for sensitive analysis in situations whenthe analytic derivative of gradients cannot be explicitly expressed or when each analysisbecomes computationally expensive.
More accurate finite difference approximations for the first derivative can be de-rived by combining different Taylor series expansions. For instance, subtracting the twoexpansions at the points f (x−h) and f (x+h) gives
f ′(x) = f (x+h)− f (x−h)2h + O
(h2) (14)
An error from Equation (14), which is referred to as the second-order central differ-ence method, is proportional to h2. Similarly, second-order forward difference (FDM2)and fourth-order central difference methods method (CDM4) for approximating the firstderivative are
f ′(x) =
FDM2 : −3 f (x)+4 f (x+h)− f (x+2h)
2h + O(h2)
CDM4 : − f (x+2h)+8 f (x+h)−8 f (x−h)+ f (x−2h)12h + O
(h4) (15)
Although the high-order finite difference method leads to less truncation error, whichcan also be minimized by taking a relatively small h, subtractive cancellations involved informulas may lead to significant round-off errors, unlike the CS approximation.
4. Proposed Method of Sensitivity Analysis
The proposed method utilizes the CS approximation to compute the sensitivity of aprobabilistic constraint with respect to a vector of design variables. This section introducesprocedures of the CS derivative approximation for gradients and sensitivity analysis.Consider the vector of random variables x = (x1, x2, x3, . . . , xn)
T and the vector of designvariable d = (d1, d2, d3, . . . , dz)
T. The sensitivity of a reliability index in the FORM withrespect to a vector of design variables can be derived using the CS approximation as
∇dβ(d, x∗) = 1‖∇G(d,u∗)‖ ·∇dg(d, x∗) = 1
‖∇G(d,u∗)‖ ·[
∂g(d,x∗)∂d1
, . . . , ∂g(d,x∗)∂dk
, . . . , ∂g(d,x∗)∂dz
]T
= 1‖∇G(d,u∗)‖ ·
=[g(d+ihe1,x∗),...,g(d+ihek ,x∗),...,g(d+ihez ,x∗)]T
h
(16)
where ek denotes the k-th column of a z-th order identity matrix (Iz). Because the limit-statefunction is defined in terms of the random variables x, it is necessary to carry out thesecalculations in the original space. Results are then transformed in the standard normalspace to perform the FORM. The gradient vector ∇G(u∗) can be rewritten as
∇G(d, u∗) = ∇x∗g(d, x∗)J−1u,x(x
∗) (17)
where J−1u,x is the inverse of the Jacobian of the x to u transformation. Note that the Jacobian
is dependent on the distribution types of random variables. For instance, the Jacobian oftransformation Ju,x for statistically independent random variables x is
Ju,x = diag[Jii], i = 1, . . . , nJii =
fi(xi)
ϕ(
Φ−1[∫ xi−∞ fi(xi)dxi
]) (18)
where fi(xi) is the marginal PDF of xi and ϕ(·) is the univariate standard normal PDF. Ifthe random variables x are normally distributed with the correlation matrix R = LLT, in

Appl. Sci. 2021, 11, 4708 7 of 20
which L is a lower-triangular matrix obtained by the Cholesky decomposition of R, theJacobian is
Ju,x = L−1D−1 (19)
where D is the diagonal matrix of standard deviations. Furthermore, the Jacobian matrixof dependent nonnormal random variables can be derived [49] as
J11 = f1(x1)
ϕ(Φ−1[∫ x1−∞ f1(x1)dx1])
Jij = 0 i < j=
fi(xi |x1,...,xi−1)
ϕ(Φ−1[Fi(xi |x1,...,xi−1)])i = j > 1
= 1ϕ(Φ−1[Fi(xi |x1,...,xi−1)])
∂Fi(xi |x1,...,xi−1)∂xj
i > j
where Fi(xi|x1, . . . , xi−1) =
xi∫−∞
fi(xi|x1, . . . , xi−1)dxi (20)
where fi(xi|x1, . . . , xi−1) denotes the conditional PDF of xi for given x1, . . . , xi−1.The gradient of the limit-state function ∇x∗g(d, x∗) in Equation (17) is then computed
as
∇x∗g(d, x∗) =[
∂g(d, x∗)∂x∗1
, . . . ,∂g(d, x∗)
∂x∗k, . . . ,
∂g(d, x∗)∂x∗n
]T(21)
Application of the CS approximation to Equation (21) yields
∇x∗g(d, x∗) = 1h ·=[g(d, x∗ + ihe1), . . . , g(d, x∗ + ihek), . . . , g(d, x∗ + ihen)]
T (22)
Note that taking a real part of g(d, x∗ + ihek), k = 1, . . . , n in Equation (22) resultsin a value of g(d, x∗). This indicates that both the value and sensitivity of the limit-statefunction can be obtained from Equation (22). Using Equation (8), the sensitivity of the first-order probability approximation with respect to a vector of design variables is obtained bycomputing
∇dPf = −ϕ(β)·=[g(d+ihe1,x∗),...,g(d+ihek ,x∗),...,g(d+ihez ,x∗)]T
h‖∇x∗ g(d,x∗)J−1u,x(x∗)‖
(23)
Note that the gradients in Equation (21) are also utilized in the FORM to compute afailure probability of a limit-state function.
When the improved Hasofer and Lind algorithm [50] is utilized to solve Equation (3),a sequence of points u by using a recursive formular is identified as
ui+1 = ui + λisi, i = 1, 2, 3, . . . . (24)
where λi is a search scale factor and si is the search direction vector obtained by
si =
(G(d,ui)∇G(d,ui)
+αiui)(
αi)T − ui (25)
The gradient ∇G(d, ui) can be computed by using the CS approximation as
∇G(
d, ui)= ∇xi g
(d, xi
)J−1u,x
(xi)=
1h·=[
g(
d, xi + ihe1
), . . . , g
(d, xi + ihek
), . . . , g
(d, xi + ihen
)]TJ−1u,x
(xi)
(26)
The proposed RBDO method using the CS approximation (RBDO−CS) performs thereliability analysis by identifying the design points based on gradients in Equations (22) and(26), and sensitivity analysis using Equation (23) to utilize a gradient-based optimizationalgorithm.

Appl. Sci. 2021, 11, 4708 8 of 20
5. Numerical Applications5.1. Comparative Study of the Accuracy of Complex-Step and Finite Difference Methods
The effect of step size on the first derivative by finite difference and CS methods isinvestigated. Consider the following highly nonlinear function:
f (x) = ex√sin3(x)+cos3(x) (27)
The four finite difference methods (first-order forward (FDM), second-order forward(FDM2), second-order central (CDM2), and fourth-order central difference (CDM4) approx-imations) and CS approximation discussed in Section 3 are utilized to compute the firstderivative at x = −0.35 with varying step sizes.
The numerical results in Figure 2a show that the first derivatives by the CS method arenot sensitive to the selection of step size. Finite difference methods, however, break downas the step size reaches the last value. Although higher-order finite difference methodsresult in fewer truncations errors, subtractive cancellation and their associate round-offerrors affect the calculations. It should be noted that the number of function evaluationsin higher-order finite difference methods is higher than one in the CS approach. Errorsbetween the exact derivatives and approximated derivatives with varying step sizes areplotted in Figure 2b. The comparison results confirm that the CS approximation is moreaccurate for small step sizes, whereas the finite difference approach cannot achieve fullaccuracy.
Figure 2. (a) Comparison of first derivatives by finite difference and complex-step (CS) methods,(b) absolute errors from computing the first derivatives with varying step sizes.
5.2. RBDO of the Short Column under a Probabilistic Strength Constraint
The proposed RBDO−CS approach is applied to identify the optimal member size ofa short column subjected to an axial force P and bending moments M1 and M2, as shownin Figure 3. Assume an elastic perfectly plastic material with yield stress σy. The limit-statefunction regarding the failure of the column is defined by
g(d, x) = 1− M1S1(d)σy
− M2S2(d)σy
−(
PA(d)σy
)q(28)
Appl. Sci. 2021, 11, 4708 9 of 20
where x =(
M1, M2, P, σy)T denotes the vector of random variables, q = 2 is the limit-state
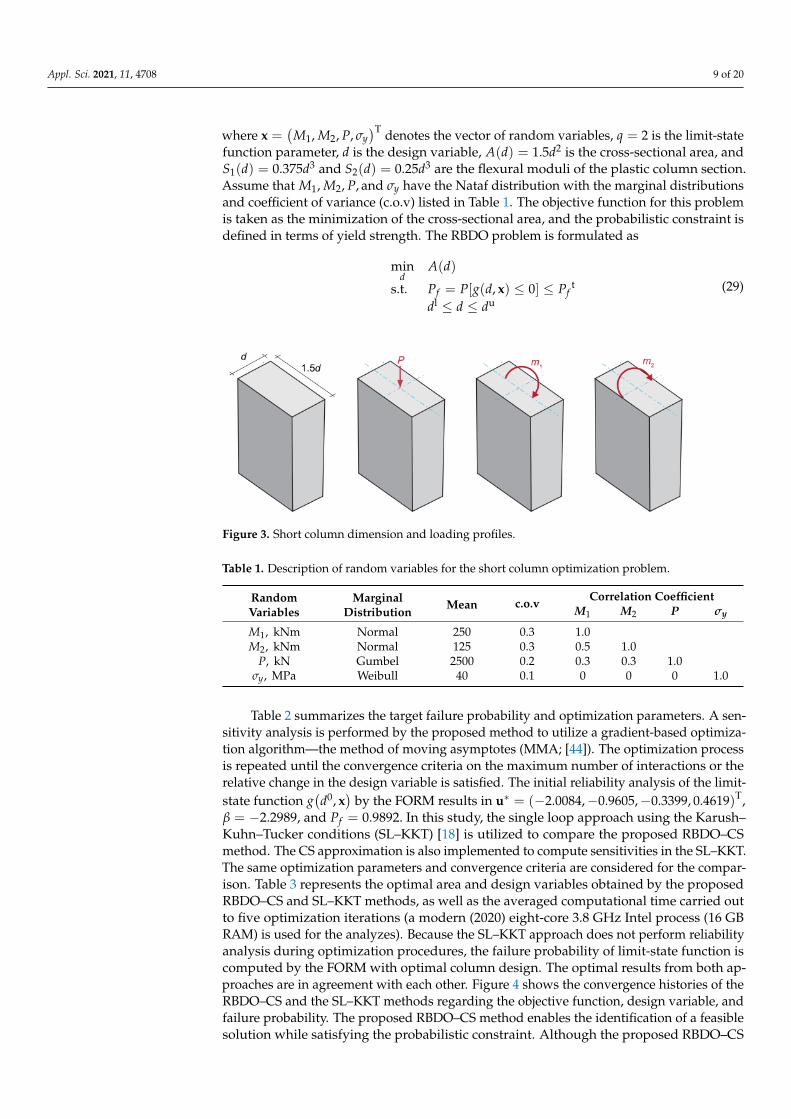
function parameter, d is the design variable, A(d) = 1.5d2 is the cross-sectional area, andS1(d) = 0.375d3 and S2(d) = 0.25d3 are the flexural moduli of the plastic column section.Assume that M1, M2, P, and σy have the Nataf distribution with the marginal distributionsand coefficient of variance (c.o.v) listed in Table 1. The objective function for this problemis taken as the minimization of the cross-sectional area, and the probabilistic constraint isdefined in terms of yield strength. The RBDO problem is formulated as
mind
A(d)
s.t. Pf = P[g(d, x) ≤ 0] ≤ Pft
dl ≤ d ≤ du(29)
Figure 3. Short column dimension and loading profiles.
Table 1. Description of random variables for the short column optimization problem.
RandomVariables
MarginalDistribution
Mean c.o.v Correlation CoefficientM1 M2 P σy
M1, kNm Normal 250 0.3 1.0M2, kNm Normal 125 0.3 0.5 1.0
P, kN Gumbel 2500 0.2 0.3 0.3 1.0σy, MPa Weibull 40 0.1 0 0 0 1.0
Table 2 summarizes the target failure probability and optimization parameters. A sen-sitivity analysis is performed by the proposed method to utilize a gradient-based optimiza-tion algorithm—the method of moving asymptotes (MMA; [44]). The optimization processis repeated until the convergence criteria on the maximum number of interactions or therelative change in the design variable is satisfied. The initial reliability analysis of the limit-state function g
(d0, x
)by the FORM results in u∗ = (−2.0084,−0.9605,−0.3399, 0.4619)T,
β = −2.2989, and Pf = 0.9892. In this study, the single loop approach using the Karush–Kuhn–Tucker conditions (SL–KKT) [18] is utilized to compare the proposed RBDO–CSmethod. The CS approximation is also implemented to compute sensitivities in the SL–KKT.The same optimization parameters and convergence criteria are considered for the compar-ison. Table 3 represents the optimal area and design variables obtained by the proposedRBDO–CS and SL–KKT methods, as well as the averaged computational time carried outto five optimization iterations (a modern (2020) eight-core 3.8 GHz Intel process (16 GBRAM) is used for the analyzes). Because the SL–KKT approach does not perform reliabilityanalysis during optimization procedures, the failure probability of limit-state function iscomputed by the FORM with optimal column design. The optimal results from both ap-proaches are in agreement with each other. Figure 4 shows the convergence histories of theRBDO–CS and the SL–KKT methods regarding the objective function, design variable, andfailure probability. The proposed RBDO–CS method enables the identification of a feasiblesolution while satisfying the probabilistic constraint. Although the proposed RBDO–CS

Appl. Sci. 2021, 11, 4708 10 of 20
method performing reliability analysis requires a slightly increased computational time forfive iterations of the optimization procedure when compared to the SL–KKT method, thenumber of iterations required to identify the converged solution is lower. Of note, when thelimit-state function is highly nonlinear, the second-order reliability method (SORM; [13])leads to a more accurate assessment of reliability. The limit-state function in Equation (28) isnonlinear and the SORM is utilized to assess failure probabilities of the optimized columnby the RBDO–CS, and SL–KKT methods. The SORM results in Table 3 indicate that thefirst-order linearization of the limit-state function may lead to a less conservative designwhen it has a high degree of nonlinearity.
Table 2. Parameters for the target failure probability and optimization.
Target Failure Probability Pft Initial Design d0, m Lower Bound dl, m
Upper Bounddu, m
ConvergenceCriterion
0.01 0.25 0.1 2.0 10−4
Table 3. Comparison between results from the RBDO−CS and SL−KKT approaches for the column design problem.
RBDOMethod
Optimalf*(m2)
Optimald*(m)
Pf Averaged Computational Time Carriedout to Five Iterations, (Seconds)
Total Numberof IterationsFORM SORM
RBDO−CS 0.2293 0.3909 0.0100 0.0126 0.0130 11SL−KKT 0.2293 0.3908 0.0101 0.0127 0.0108 12
Figure 4. Convergence history of the proposed RBDO−CS and SL−KKT approaches: (a) optimalarea; (b) design variable; and (c) failure probability.
5.3. RBDO of the Ductile Frame Structure Subjected to Probabilistic Moment Strength Constraints
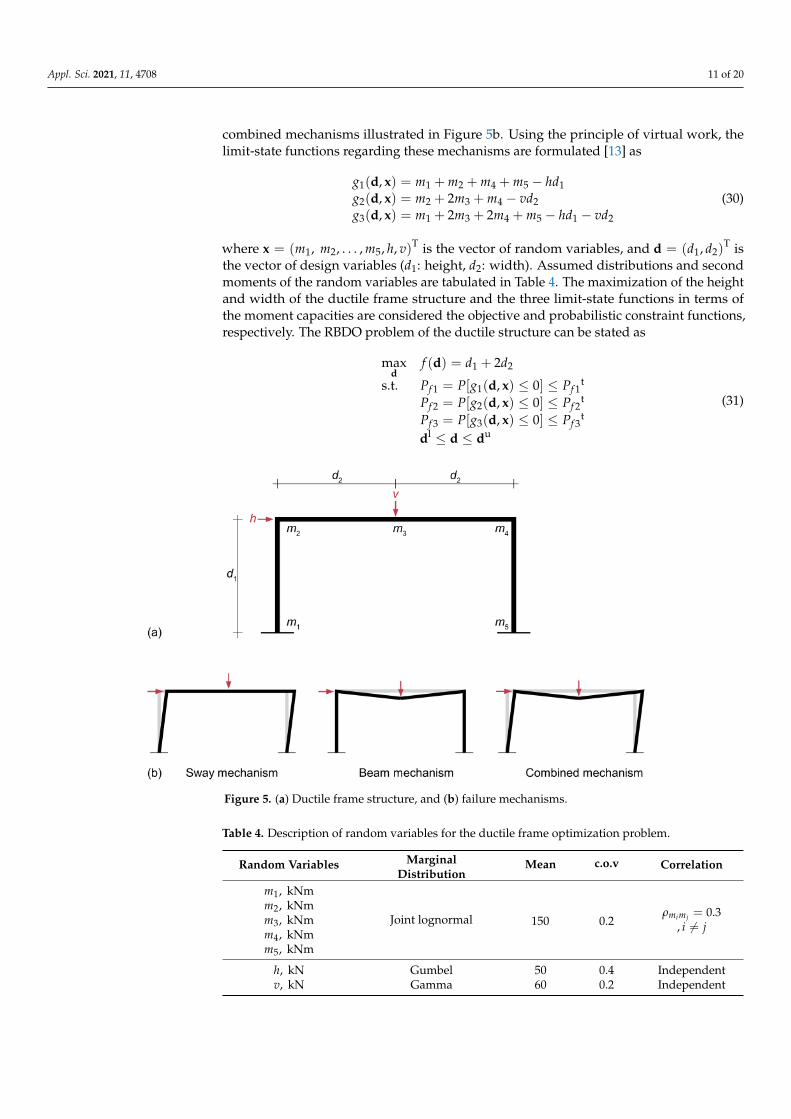
The frame structure under uncertainty in the magnitudes of external forces andmoment capacities is illustrated in Figure 5a. Assume that the frame structure is constructedwith ductile members that have plastic moment capacities mi, i = 1, . . . , 5, at joints. Underthe externally applied forces h, v, this frame may fail due to any of the sway, beam, and
Appl. Sci. 2021, 11, 4708 11 of 20
combined mechanisms illustrated in Figure 5b. Using the principle of virtual work, thelimit-state functions regarding these mechanisms are formulated [13] as
g1(d, x) = m1 + m2 + m4 + m5 − hd1g2(d, x) = m2 + 2m3 + m4 − vd2g3(d, x) = m1 + 2m3 + 2m4 + m5 − hd1 − vd2
(30)
where x = (m1, m2, . . . , m5, h, v)T is the vector of random variables, and d = (d1, d2)T is
the vector of design variables (d1: height, d2: width). Assumed distributions and secondmoments of the random variables are tabulated in Table 4. The maximization of the heightand width of the ductile frame structure and the three limit-state functions in terms ofthe moment capacities are considered the objective and probabilistic constraint functions,respectively. The RBDO problem of the ductile structure can be stated as
maxd
f (d) = d1 + 2d2
s.t. Pf 1 = P[g1(d, x) ≤ 0] ≤ Pf 1t
Pf 2 = P[g2(d, x) ≤ 0] ≤ Pf 2t
Pf 3 = P[g3(d, x) ≤ 0] ≤ Pf 3t
dl ≤ d ≤ du
(31)
Figure 5. (a) Ductile frame structure, and (b) failure mechanisms.
Table 4. Description of random variables for the ductile frame optimization problem.
Random Variables MarginalDistribution
Mean c.o.v Correlation
m1, kNm
Joint lognormal 150 0.2ρmimj = 0.3
, i 6= j
m2, kNmm3, kNmm4, kNmm5, kNm
h, kN Gumbel 50 0.4 Independentv, kN Gamma 60 0.2 Independent
Appl. Sci. 2021, 11, 4708 12 of 20
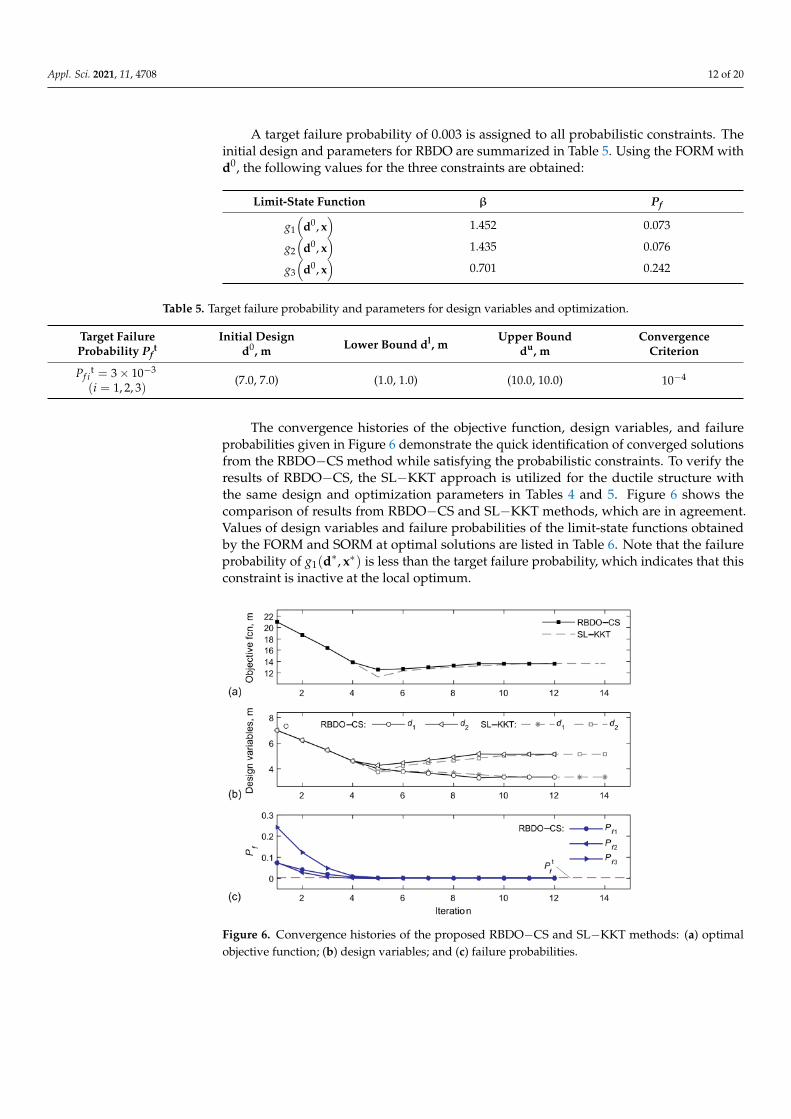
A target failure probability of 0.003 is assigned to all probabilistic constraints. Theinitial design and parameters for RBDO are summarized in Table 5. Using the FORM withd0, the following values for the three constraints are obtained:
Limit-State Function β Pf
g1
(d0, x
)1.452 0.073
g2
(d0, x
)1.435 0.076
g3
(d0, x
)0.701 0.242
Table 5. Target failure probability and parameters for design variables and optimization.
Target FailureProbability Pf
tInitial Design
d0, m Lower Bound dl, mUpper Bound
du, mConvergence
Criterion
Pf it = 3× 10−3
(i = 1, 2, 3)(7.0, 7.0) (1.0, 1.0) (10.0, 10.0) 10−4
The convergence histories of the objective function, design variables, and failureprobabilities given in Figure 6 demonstrate the quick identification of converged solutionsfrom the RBDO−CS method while satisfying the probabilistic constraints. To verify theresults of RBDO−CS, the SL−KKT approach is utilized for the ductile structure withthe same design and optimization parameters in Tables 4 and 5. Figure 6 shows thecomparison of results from RBDO−CS and SL−KKT methods, which are in agreement.Values of design variables and failure probabilities of the limit-state functions obtainedby the FORM and SORM at optimal solutions are listed in Table 6. Note that the failureprobability of g1(d∗, x∗) is less than the target failure probability, which indicates that thisconstraint is inactive at the local optimum.
Figure 6. Convergence histories of the proposed RBDO−CS and SL−KKT methods: (a) optimalobjective function; (b) design variables; and (c) failure probabilities.

Appl. Sci. 2021, 11, 4708 13 of 20
Table 6. Comparison between results from the RBDO−CS and SL−KKT methods for the frame structure problem.
RBDOMethod
Optimalf∗(m)
Optimald∗(m)
Pfi Averaged Computational Time Carriedout to Five Iterations, (Seconds)
Total Number ofIterationsFORM SORM
RBDO−CS 13.658 (3.362,5.148)i = 1 0.0004 0.0004
0.105 12i = 2 0.0030 0.0028i = 3 0.0030 0.0032
SL−KKT 13.667 (3,364,5.151)i = 1 0.0004 0.0012
0.031 14i = 2 0.0030 0.0027i = 3 0.0030 0.0033
The RBDO−CS method results in the identification of more optimal solutions whencompared to the results from SL−KKT method. Furthermore, the SORM results indicatethat the failure probabilities of limit-state functions at d∗ obtained by RBDO−CS methodare closer to the target failure probabilities than by the SL−KKT method.
5.4. RBDO of the Truss Structure under Probabilistic Strength Constraints
The proposed RBDO−CS method is applied to identify the optimal element sizes ofan indeterminate truss structure by McDonald and Mahadevan [51] (see Figure 7). Thedeterministic design variables d = (A1, A2, A3, A4, A5, A6)
T are the cross-sectional areasof elements. The applied force FA and yield strengths σi, i = 1, . . . , 6 of the elements arethe random variables x =
(σ1, σ2, . . . , σy, FA
)T, which are assumed to follow the normaldistribution. All random variables are statistically independent of each other, and themeans and standard deviations of them are summarized in Table 7. In this example,RBDO aims to minimize the volume of the truss structure while satisfying the probabilisticconstraints in terms of yield strengths. In this example, the truss element forces are derivedin terms of the applied load with the assumption of the two diagonal elements carryingequal forces. Limit-state functions are defined as:
gi(d, x) = Aiσi −√
22 FA, i = 1, 2
= Aiσi − 12 FA, i = 3, 4, 5, 6
A1, A2, A3, A4, A5, A6 ≥ 0 (32)
Figure 7. Six-element truss structure.

Appl. Sci. 2021, 11, 4708 14 of 20
Table 7. Description of random variables for the truss optimization problem.
RandomVariables
MarginalDistribution
Mean StandardDeviation
Correlation
FA, kips Normal 1000 100 Independent
σ1, ksi
Normal 36 3 Independent
σ2, ksiσ3, ksiσ4, ksiσ5, ksiσ6, ksi
The RBDO problem can be defined as follows:
mind
f (d) =√
2 ∑2i=1 Ai + ∑6
j=3 Aj
s.t. Pf i = P[gi(d, x) ≤ 0] ≤ Pf it, i = 1, . . . , 6
dl ≤ d ≤ du(33)
The initial design variables d0 are set to 12 in2, and the corresponding failure prob-abilities of the constraints by the FORM are Pf i = (0.999, 0.999, 0.865, 0.865, 0.865, 0.865).The proposed RBDO−CS method with the parameters listed in Table 8 is able to find anoptimal solution quickly, whose convergence history is plotted in Figure 8. Furthermore,the optimal designs are confirmed with the SL−KKT approach.
Table 8. Target failure probability and parameters for design variables and optimization.
Target FailureProbability Pf
tInitial Design
d0, in2 Lower Bound dl, in2 Upper Bounddu, in2
ConvergenceCriterion
Pf it = 1.667× 10−4
(i = 1, . . . , 6)(12, 12) (5, 5) (50, 50) 10−3
Figure 8. Convergence histories of the proposed RBDO−CS method: (a) optimal volume; (b) designvariables; and (c) failure probabilities.
Table 9 represents the optimal design and failure probabilities of constraints. Theresults of the SORM and MCS with 108 samples (c.o.v = 0.02) confirm the failure probabilityPf i of the optimal design by the proposed method. It should be noted that the FORM

Appl. Sci. 2021, 11, 4708 15 of 20
and SORM approximations of the probability of failure are sufficiently accurate for thisproblem. It is because the limit-state functions in Equation (32) are linear, and randomvariables following normal distributions are statistically independent of each other.
Table 9. Results of the RBDO−CS and SL−KKT approaches for the truss optimization problem.
Optimal f∗×L, in3 Optimal A∗i , in2 Pfi
RBDO−CS/SL−KKT Element RBDO−CS/SL−KKT FORM SORM MCS
177.46
1 31.37 1.667× 10−4 1.667× 10−4 1.655× 10−4
2 31.37 1.667× 10−4 1.667× 10−4 1.672× 10−4
3 22.18 1.667× 10−4 1.667× 10−4 1.684× 10−4
4 22.18 1.667× 10−4 1.667× 10−4 1.667× 10−4
5 22.18 1.667× 10−4 1.667× 10−4 1.675× 10−4
6 22.18 1.667× 10−4 1.667× 10−4 1.654× 10−4
5.5. RBDO of the Truss Cantilever Structure Subjected to Probabilistic Displacement Constraints
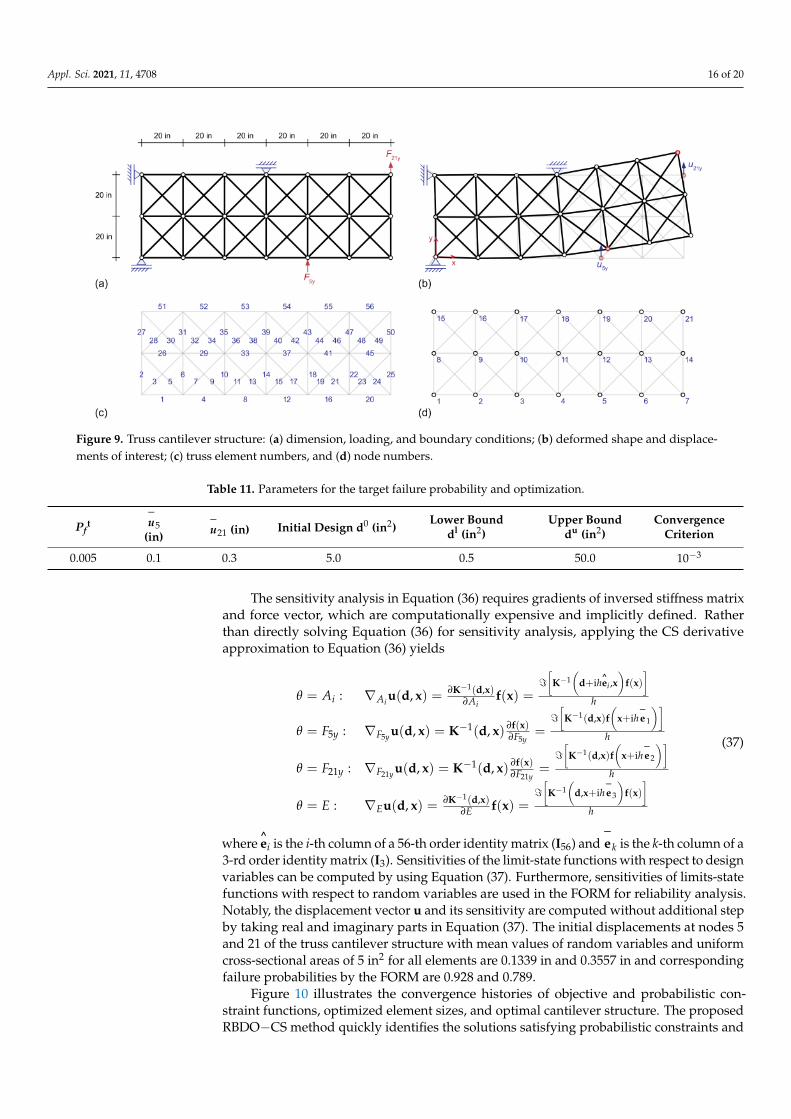
Consider a truss cantilever structure consisting of 56 bar elements and 21 nodes(Figure 9c,d). The truss cantilever structure subjected to two external forces at nodes 5 and21 contains three-roller supports as shown in Figure 9a. All of the truss elements have thesame modulus of elasticity E. The objective of RBDO is to minimize the weight of the trusscantilever structure and constraints are vertical displacements (u5y, u21y) at nodes 5 and21. Limit-state functions are defined as follows:
g1(d, x) = u5 − u5y(d, x)g2(d, x) = u21 − u21y(d, , , x)
(34)
where u5, u21 are the maximum allowable displacements in the vertical direction, respec-tively. Two external forces and modulus of elasticity are assumed to be random variablesx =
(F5y, F21y, E
), and cross-sectional areas are design variables d = (Ai, i = 1, . . . , 56).
Table 10 provides marginal distributions, mean values, and second moments of the randomvariables. Parameters for reliability analysis and optimization are listed in Table 11. TheRBDO problem can be written in a nested formulation as follows:
mind
f (d) = ∑56i=1 AiLi
s.t. Pf i = P[gi(d, x) ≤ 0] ≤ Pf it, i = 1, 2
with K(d, x)u(d, x) = f(x)dl ≤ d ≤ du (35)
where K is the global stiffness matrix of the truss cantilever structure, u is the globaldisplacement vector, and f is the global external force vector. Note that u is an implicitfunction defined through the equilibrium equations K(d, x)u(d, x) = f(x). The derivative ofthe displacement vector with respect to a parameter θ(= d or x) is obtained analytically as
∇θu(d, x) = ∂K−1(d,x)∂θ f (x) + K−1(d, x) ∂f(x)
∂θ(36)
Table 10. Description of random variables for the truss structure optimization problem.
RandomVariables
MarginalDistribution
Mean c.o.v Correlation
F5y, kips Joint lognormal 120 0.1 ρF5y, F21y = 0.3F21y, kips Joint lognormal 140 0.1
E, ksi Normal 29000 0.2 Independent
Appl. Sci. 2021, 11, 4708 16 of 20
Figure 9. Truss cantilever structure: (a) dimension, loading, and boundary conditions; (b) deformed shape and displace-ments of interest; (c) truss element numbers, and (d) node numbers.
Table 11. Parameters for the target failure probability and optimization.
Pft
¯u5
(in)¯u21 (in) Initial Design d0 (in2)
Lower Bounddl (in2)
Upper Bounddu (in2)
ConvergenceCriterion
0.005 0.1 0.3 5.0 0.5 50.0 10−3
The sensitivity analysis in Equation (36) requires gradients of inversed stiffness matrixand force vector, which are computationally expensive and implicitly defined. Ratherthan directly solving Equation (36) for sensitivity analysis, applying the CS derivativeapproximation to Equation (36) yields
θ = Ai : ∇Ai u(d, x) = ∂K−1(d,x)∂Ai
f(x) ==[
K−1(
d+ih^ei ,x)
f(x)]
h
θ = F5y : ∇F5y u(d, x) = K−1(d, x) ∂f(x)∂F5y
==[
K−1(d,x)f(
x+ih¯e 1
)]h
θ = F21y : ∇F21y u(d, x) = K−1(d, x) ∂f(x)∂F21y
==[
K−1(d,x)f(
x+ih¯e 2
)]h
θ = E : ∇Eu(d, x) = ∂K−1(d,x)∂E f(x) =
=[
K−1(
d,x+ih¯e 3
)f(x)
]h
(37)
where^ei is the i-th column of a 56-th order identity matrix (I56) and
¯ek is the k-th column of a
3-rd order identity matrix (I3). Sensitivities of the limit-state functions with respect to designvariables can be computed by using Equation (37). Furthermore, sensitivities of limits-statefunctions with respect to random variables are used in the FORM for reliability analysis.Notably, the displacement vector u and its sensitivity are computed without additional stepby taking real and imaginary parts in Equation (37). The initial displacements at nodes 5and 21 of the truss cantilever structure with mean values of random variables and uniformcross-sectional areas of 5 in2 for all elements are 0.1339 in and 0.3557 in and correspondingfailure probabilities by the FORM are 0.928 and 0.789.
Figure 10 illustrates the convergence histories of objective and probabilistic con-straint functions, optimized element sizes, and optimal cantilever structure. The proposedRBDO−CS method quickly identifies the solutions satisfying probabilistic constraints and

Appl. Sci. 2021, 11, 4708 17 of 20
then reduces the volume to minimize. Optimization results in Figure 10c indicate thatelements connected to the roller support in the middle and the bottom chords are primarilystrengthened to satisfy probabilistic constraints. Table 12 provides the results from theRBDO−CS method for the truss cantilever structure. The SL−KKT method is utilized toverify optimization results. It is observed that the results from the proposed RBDO−CSand SL−KKT approaches closely match. Failure probabilities of limit-state functions withoptimal design d∗ and random variables are estimated by the FORM, SORM, and MCSwith 107 samples (c.o.v = 0.03). This study confirms that the proposed RBDO−CS methodenables the efficient identification of optimal solutions. It is noted that the computationalcosts of RBDO−CS and SL−KKT methods are similar with a larger number of design vari-ables, however, the proposed RBDO−CS method identifies converged solutions faster thanthe SL−KKT method. Next, the force random variables F5y, F21y are assumed to follow thenormal distributions with the same means and standard deviations. This is to investigatethe effect of probabilistic distribution types on the optimal design and to demonstrate thegeneral applicability of the proposed method. The minimum objective function value islarger than that of the lognormal distribution case, as illustrated in Figure 11. Further-more, the impact of statistical correlation between random forces on the optimal designis investigated by altering correlation coefficients ρF5y , F21y from 0.0 to 0.6. The optimalvolumes obtained by the RBDO−CS method are shown in Figure 11. A positive correlationamong the random forces results in higher volume, i.e., more conservative design. This isbecause positively correlated forces F5y, F21y increase the vertical displacements, and thusthe failure probabilities.
Figure 10. Results of the proposed RBDO−CS: (a) Convergence histories of volume and failure probability; (b) cross-sectional areas (elements having the minimum area of 0.5 in2 are in grey); and (c) illustration of normalized cross-sectionalareas of elements (elements in blue are in tension and those in red are in compression.).

Appl. Sci. 2021, 11, 4708 18 of 20
Table 12. Comparison between results from the RBDO−CS and SL−KKT for the truss cantilever structure design.
RBDOMethod
Optimal f ∗
(ft3)
Pf i Averaged Computational Time Carriedout to Five Iterations, (Seconds)
Total Number ofIterationsi FORM SORM MCS
RBDO−CS 5.8281 0.0050 0.00516 0.00516
0.0637 372 0.0050 0.00516 0.00517
SL−KKT 5.8271 0.0050 0.00517 0.00518
0.0591 1752 0.0050 0.00518 0.00519
Figure 11. Optimal volumes versus correlation between external forces having different marginaldistributions.
6. Concluding Remarks
An approach to the RBDO of structures is developed using CS approximation andthe FORM. The improvement in the accuracy of probabilistic constraints by the CS deriva-tive and its straightforward implementation are presented in this paper. The proposedapproach incorporates component reliability targets in RBDO and eliminates the need toanalytically derive gradients of functions with respect to the design and random variablesfor sensitivity analysis. In addition to accounting for the statistical dependence betweentwo-component events, the approach can compute the sensitivities of the failure probabilityto various parameters, which facilitate the use of gradient-based optimization algorithms.The first numerical example demonstrates the accuracy of the CS approximation withoutsignificant reliance on a step size, compared to finite difference methods. Furthermore,the uniform applicability of the proposed approach to RBDO of structures is confirmedthrough four numerical examples. This paper focuses on the CRBDO with probabilisticconstraints of multiple failure modes of a design. The CRBDO problem is formulated suchthat the optimal structure satisfies each failure mode with target failure probabilities. Insome instances, the design constraint needs to be defined as a “system” event of multipleconstraints, (i.e., a logical (or Boolean) function of multiple failure modes), which is com-monly termed a system reliability-based design optimization (SRBDO) problem. In thesecases, the sensitivity analysis of the system reliability can be more expensive and compli-cated than a CRBDO problem due to the statistical dependency among failure events andcomplexity inherent in the formula. The implementation of -step approximation in SRBDOwith diverse reliability analysis methods remains to be further explored. To improve theaccuracy of reliability analysis and enhance the use of gradient-based optimization algo-rithms, areas for further study include sensitivity analysis with CS approximation unifiedwith the SORM or multiple design points approaches, and its incorporation into RBDO.

Appl. Sci. 2021, 11, 4708 19 of 20
Funding: This research was funded by the Collaboration for Unprecedented Success and Excellence(CUSE) grant program of Syracuse University.
Institutional Review Board Statement: Not applicable.
Informed Consent Statement: Not applicable.
Conflicts of Interest: The author declares no conflict of interest.
References1. Haftka, R.T.; Gürdal, Z. Elements of Structural Optimization; Springer: Dordrecht, The Netherlands, 1992.2. Sandgren, E.; Cameron, T. Robust design optimization of structures through consideration of variation. Comput. Struct. 2002, 80,
1605–1613. [CrossRef]3. Marano, G.C.; Sgobba, S.; Greco, R.; Mezzina, M. Robust optimum design of tuned mass dampers devices in random vibrations
mitigation. J. Sound Vib. 2008, 313, 472–492. [CrossRef]4. Zang, C.; Friswell, M.; Mottershead, J. A review of robust optimal design and its application in dynamics. Comput. Struct. 2005,
83, 315–326. [CrossRef]5. Parkinson, A.; Sörensen, C.; Pourhassan, N. A General Approach for Robust Optimal Design. J. Mech. Des. 1993, 115, 74–80.
[CrossRef]6. Chen, W.; Allen, J.K.; Tsui, K.-L.; Mistree, F. A Procedure for Robust Design: Minimizing Variations Caused by Noise Factors and
Control Factors. J. Mech. Des. 1996, 118, 478–485. [CrossRef]7. Sundaresan, S.; Ishii, K.; Houser, D.R. A robust optimization procedure with variations on design variables and constraints. Eng.
Optim. 1995, 24, 101–117. [CrossRef]8. Messac, A.; Ismail-Yahaya, A. Multiobjective robust design using physical programming. Struct. Multidiscip. Optim. 2002, 23,
357–371. [CrossRef]9. Enevoldsen, I.; Sørensen, J. Reliability-based optimization in structural engineering. Struct. Saf. 1994, 15, 169–196. [CrossRef]10. Tu, J.; Choi, K.K.; Park, Y.H. A New Study on Reliability-Based Design Optimization. J. Mech. Des. 1999, 121, 557–564. [CrossRef]11. Youn, B.D.; Choi, K.K.; Du, L. Enriched Performance Measure Approach for Reliability-Based Design Optimization. AIAA J. 2005,
43, 874–884. [CrossRef]12. Youn, B.D.; Choi, K.K.; Park, Y.H. Hybrid Analysis Method for Reliability-Based Design Optimization. J. Mech. Des. 2003, 125,
221–232. [CrossRef]13. Der Kiureghian, A. First- and Second-Order Reliability Methods. In Engineering Design Reliability Handbook; CRC Press: Boca
Raton, FL, USA, 2005.14. Du, X.; Chen, W. Sequential Optimization and Reliability Assessment Method for Efficient Probabilistic Design. J. Mech. Des.
2004, 126, 225–233. [CrossRef]15. Zou, T.; Mahadevan, S. A direct decoupling approach for efficient reliability-based design optimization. Struct. Multidiscip. Optim.
2006, 31, 190–200. [CrossRef]16. Shan, S.; Wang, G.G. Reliable design space and complete single-loop reliability-based design optimization. Reliab. Eng. Syst. Saf.
2008, 93, 1218–1230. [CrossRef]17. Nguyen, T.H.; Song, J.; Paulino, G.H. Single-Loop System Reliability-Based Design Optimization Using Matrix-Based System
Reliability Method: Theory and Applications. J. Mech. Des. 2009, 132, 011005. [CrossRef]18. Liang, J.; Mourelatos, Z.P.; Tu, J. A Single-Loop Method for Reliability-Based Design Optimization. In Proceedings of the 28th
Biennial Mechanisms and Robotics Conference, Parts A and B, ASME International. Salt Lake, UT, USA, 28 September–2 October2004; Volume 1, pp. 419–430.
19. Liang, J.; Mourelatos, Z.P.; Nikolaidis, E. A Single-Loop Approach for System Reliability-Based Design Optimization. J. Mech.Des. 2007, 129, 1215–1224. [CrossRef]
20. Chun, J.; Paulino, G.H.; Song, J. Reliability-based topology optimization by ground structure method employing a discretefiltering technique. Struct. Multidiscip. Optim. 2019, 60, 1035–1058. [CrossRef]
21. Chun, J.; Song, J.; Paulino, G.H. System-reliability-based design and topology optimization of structures under constraints onfirst-passage probability. Struct. Saf. 2019, 76, 81–94. [CrossRef]
22. Grujicic, M.; Arakere, G.; Bell, W.C.; Marvi, H.; Yalavarthy, H.V.; Pandurangan, B.; Haque, I.; Fadel, G.M. Reliability-BasedDesign Optimization for Durability of Ground Vehicle Suspension System Components. J. Mater. Eng. Perform. 2009, 19, 301–313.[CrossRef]
23. Adams, B.; Eldred, M.; Wittwer, J. Reliability-Based Design Optimization for Shape Design of Compliant Micro-Electro-MechanicalSystems. In Proceedings of the 11th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Portsmouth, VA,USA, 6–8 September 2006; Volume 2, pp. 1042–1056.
24. Allen, M.; Maute, K. Reliability-based design optimization of aeroelastic structures. Struct. Multidiscip. Optim. 2004, 27, 228–242.[CrossRef]
25. Liu, Z.; Zhu, C.; Zhu, P.; Chen, W. Reliability-based design optimization of composite battery box based on modified particleswarm optimization algorithm. Compos. Struct. 2018, 204, 239–255. [CrossRef]
Appl. Sci. 2021, 11, 4708 20 of 20
26. Song, J.; Kang, W.-H.; Lee, Y.-J.; Chun, J. Structural System Reliability: Overview of Theories and Applications to Optimization.ASCE-ASME J. Risk Uncertain. Eng. Syst. Part. A Civ. Eng. 2021, 7, 03121001. [CrossRef]
27. Frangopol, D.M.; Maute, K. Reliability-based optimization of civil and aerospace structural systems. In Engineering DesignReliability Handbook (Chapter 24); Singhal, S., Ghiocel, D., Nikolaidis, E., Eds.; CRC Press: Boca Raton, FL, USA, 2004; pp. 1–32.
28. Tsompanakis, Y.; Lagaros, N.D.; Papadrakakis, M. Structural Design Optimization Considering Uncertainties; CRC Press: Baca Raton,FL, USA, 2008; Volume 1.
29. Ambartzumian, R.; Der Kiureghian, A.; Ohaniana, V.; Sukiasiana, H. Multinormal probability by sequential conditionedimportance sampling: Theory and application. Probabilistic Eng. Mech. 1998, 13, 299–308. [CrossRef]
30. Genz, A. Numerical Computation of Multivariate Normal Probabilities. J. Comput. Graph. Stat. 1992, 1, 141–149. [CrossRef]31. Wang, Z.; Song, J. Cross-entropy-based adaptive importance sampling using von Mises-Fisher mixture for high dimensional
reliability analysis. Struct. Saf. 2016, 59, 42–52. [CrossRef]32. Kurtz, N.; Song, J. Cross-entropy-based adaptive importance sampling using Gaussian mixture. Struct. Saf. 2013, 42, 35–44.
[CrossRef]33. Li, Z. Reliability-Based Design Optimization of Nonlinear Beam-Columns. Ph.D. Thesis, Virginia Polytechnic Institute and State
University, Blacksburg, VA, USA, 30 April 2018.34. Liu, P.L. Der Kiureghian, A. Optimization algorithms for structural reliability. Struct. Saf. 1991, 9, 161–177. [CrossRef]35. Bissell, D.; Ang, A.H.S.; Tang, W.H. Probability Concepts in Engineering Planning and Design: Vol. I-Basic Principles. J. R. Stat.
Soc. Ser. D Stat. 1979, 28, 226. [CrossRef]36. Der Kiureghian, A.; Lin, H.; Hwang, S. Second-Order Reliability Approximations. J. Eng. Mech. 1987, 113, 1208–1225. [CrossRef]37. Breitung, K. Asymptotic Approximations for Multinormal Integrals. J. Eng. Mech. 1984, 110, 357–366. [CrossRef]38. Der Kiureghian, A.; Dakessian, T. Multiple design points in first and second-order reliability. Struct. Saf. 1998, 20, 37–49.
[CrossRef]39. Grandhi, R.V.; Wang, L. Reliability-based structural optimization using improved two-point adaptive nonlinear approximations.
Finite Elements Anal. Des. 1998, 29, 35–48. [CrossRef]40. Au, S.; Papadimitriou, C.; Beck, J. Reliability of uncertain dynamical systems with multiple design points. Struct. Saf. 1999, 21,
113–133. [CrossRef]41. Boggs, P.T.; Tolle, J.W. Sequential Quadratic Programming. Acta Numer. 1995, 4, 1–51. [CrossRef]42. Fleury, C.; Braibant, V. Structural optimization: A new dual method using mixed variables. Int. J. Numer. Methods Eng. 1986, 23,
409–428. [CrossRef]43. Fleury, C. Structural weight optimization by dual methods of convex programming. Int. J. Numer. Methods Eng. 1979, 14,
1761–1783. [CrossRef]44. Svanberg, K. The method of moving asymptotes—A new method for structural optimization. Int. J. Numer. Methods Eng. 1987, 24,
359–373. [CrossRef]45. Bjerager, P.; Krenk, S. Parametric Sensitivity in First Order Reliability Theory. J. Eng. Mech. 1989, 115, 1577–1582. [CrossRef]46. Lyness, J.N.; Moler, C.B. Numerical Differentiation of Analytic Functions. SIAM J. Numer. Anal. 1967, 4, 202–210. [CrossRef]47. Squire, W.; Trapp, G. Using Complex Variables to Estimate Derivatives of Real Functions. SIAM Rev. 1998, 40, 110–112. [CrossRef]48. Martins, J.R.R.A.; Sturdza, P.; Alonso, J.J. The complex-step derivative approximation. ACM Trans. Math. Softw. 2003, 29, 245–262.
[CrossRef]49. Rosenblatt, M. Remarks on a Multivariate Transformation. Ann. Math. Stat. 1952, 23, 470–472. [CrossRef]50. Zhang, Y.; Der Kiureghian, A. Two Improved Algorithms for Reliability Analysis. In Reliability and Optimization of Structural
Systems; Springer Science and Business Media LLC: Boston, MA, USA, 1995; pp. 297–304.51. McDonald, M.; Mahadevan, S. Design Optimization With System-Level Reliability Constraints. J. Mech. Des. 2008, 130, 021403.
[CrossRef]




















