
Reduced-order computational models for the transient dynamics of spatial structures
169
POLITECNICO DI MILANO Facoltà di Ingegneria Industriale Corso di Laurea Magistrale in Ingegneria Spaziale IMPLEMENTAZIONE SU NASTRAN DI UN METODO DI RIDUZIONE FUNZIONALE NELLE MEDIE FREQUENZE PER STRUTTURE SPAZIALI A TRALICCIO Relatore: Prof. Gian Luca GHIRINGHELLI Tesi di Laurea di: Maximiliano FIUMARA Matr. n. 740417 Anno Accademico 2012 - 2013
Transcript of Reduced-order computational models for the transient dynamics of spatial structures

POLITECNICO DI MILANO
Facoltà di Ingegneria Industriale
Corso di Laurea Magistrale in Ingegneria Spaziale
IMPLEMENTAZIONE SU NASTRAN DI UN
METODO DI RIDUZIONE FUNZIONALE NELLE
MEDIE FREQUENZE PER STRUTTURE SPAZIALI
A TRALICCIO
Relatore: Prof. Gian Luca GHIRINGHELLI
Tesi di Laurea di:
Maximiliano FIUMARA
Matr. n. 740417
Anno Accademico 2012 - 2013

2
“Si gusta doppiamente la felicità faticata”
B. Gracian
“Come se gli angeli fossero lì a dire che sì, è tutto possibile... come se i diavoli
stessero un po'a dire di no, che son tutte favole”
L. Ligabue, Buonanotte all’Italia
A me stesso,
la persona che esige di più da me

3
INDICE
INDICE ........................................................................................................................... 3
INDICE DELLE FIGURE ............................................................................................ 5
INDICE DELLE TABELLE ......................................................................................... 7
SOMMARIO .................................................................................................................. 8
1. INTRODUZIONE ................................................................................................. 9
1.1. BREVE RIASSUNTO DEL LAVORO .................................................................... 9
1.2. IL CAMPO DELLE MEDIE FREQUENZE .............................................................. 9
2. CENNI TEORICI ................................................................................................ 16
2.1. INTRODUZIONE ............................................................................................. 16
2.2. IL METODO DI SOIZE ............................................................................... 16
2.2.1. Introduzione ............................................................................................. 16
2.2.2. Il problema differenziale e la sua soluzione debole ................................. 20
2.2.3. Costruzione del modello ridotto ............................................................... 25
2.2.4. Approssimazione a dimensione finita ....................................................... 28
2.2.5. Costruzione del sottospazio dominante degli autovalori usando il metodo
di iterazione dei sottospazi .................................................................................... 36
2.3. LA PROPER ORTHOGONAL DECOMPOSITION ................................... 46
2.3.1. Introduzione ............................................................................................. 46
2.3.2. Il metodo Karhunen-Loève ....................................................................... 47
2.3.3. Formulazione matematica del KLD ......................................................... 48
2.3.4. Interpretazione fisica del POD ................................................................ 53
2.3.5. Derivazione in frequenza del KLD ........................................................... 57
2.3.6. Applicazione del KLD ad una struttura a traliccio 2D ............................ 61
2.4. IL METODO DI C. SOIZE E POD A CONTATTO ..................................... 71
3. IMPLEMENTAZIONE NUMERICA ............................................................... 74
3.1. INTRODUZIONE ............................................................................................. 74
3.2. BREVE DESCRIZIONE DEL PROGRAMMA ....................................................... 74
3.2.1. Elenco dei file utilizzati ............................................................................ 74
3.2.2. Funzionamento del programma ............................................................... 76
3.3. VALIDAZIONE SU UN MODELLO DI PIASTRA ................................................. 80
3.3.1. Descrizione del modello di piastra........................................................... 80
3.3.2. Risultati della validazione ........................................................................ 83
4. VALIDAZIONE SU MODELLO A TRALICCIO .......................................... 89

4
4.1. INTRODUZIONE ............................................................................................. 89
4.2. LA STRUTTURA A TRALICCIO TRUSS ........................................................... 89
4.2.1. Descrizione della struttura TRUSS .......................................................... 89
4.2.2. Verifica di funzionamento iniziale............................................................ 92
4.2.3. Scelta fascia MF e applicazione del metodo di riduzione ........................ 96
4.2.4. Funzione di densità modale e analisi delle frequenze proprie di ciascuna
trave 100
4.2.5. Tentativo di cambio del solutore LANCZOS .......................................... 104
4.2.6. Valutazione del contributo energetico di ciascun modo e rappresentazione
delle forme modali ............................................................................................... 105
4.3. LA STRUTTURA A TRALICCIO SPACE ......................................................... 111
4.3.1. Descrizione della struttura SPACE ........................................................ 112
4.3.2. Scelta fascia MF e applicazione del metodo di riduzione ...................... 114
4.3.3. Valutazione del contributo energetico di ciascun modo e rappresentazione
delle forme modali ............................................................................................... 116
4.3.4. Analisi del comportamento della struttura in condizione vincolata e a
frequenze più elevate ........................................................................................... 121
5. CONFRONTO CON ALTRI METODI DI RIDUZIONE ............................ 126
5.1. INTRODUZIONE ........................................................................................... 126
5.2. L’ENERGY OPERATOR VS L’ANALISI MODALE CLASSICA........................... 126
5.2.1. Breve introduzione teorica ..................................................................... 126
5.2.2. Implementazione in NASTRAN............................................................... 130
5.2.3. Confronto col metodo di C. Soize........................................................... 130
5.3. L’ENERGY OPERATOR VS UN METODO HF ................................................. 137
5.3.1. Breve introduzione teorica ..................................................................... 137
5.3.2. Implementazione in MATLAB ................................................................ 141
5.3.3. Confronto col metodo di C. Soize........................................................... 144
6. CONCLUSIONE E SVILUPPI POSSIBILI ................................................... 149
APPENDICE .............................................................................................................. 152
CENNI STORICI SU ONERA ................................................................................ 152
BREVE DESCRIZIONE DEL PROGRAMMA MSC.NASTRAN E DEL CODICE
DI PROGRAMMAZIONE DMAP .......................................................................... 156
NOMENCLATURA E ACRONIMI ........................................................................ 164
BIBLIOGRAFIA ....................................................................................................... 166

5
INDICE DELLE FIGURE
Figura 1.2.1 Esempio di densità di energia meccanica di una struttura .............. 11
Figura 1.2.2 Immagine della struttura a traliccio della ISS................................. 12
Figura 1.2.3: SPACE, la struttura scelta per le analisi ........................................ 13
Figura 2.3.1 Sistema a 3 masse e 3 molle ........................................................... 55
Figura 2.3.2 Traliccio a 18 baie .......................................................................... 63
Figura 2.3.3 POM dominante per la forzante di tipo I ........................................ 66
Figura 2.3.4 POM dominante per la forzante di tipo II ....................................... 67
Figura 2.3.5 POM dominante per la forzante di tipo III ..................................... 67
Figura 2.3.6 Modi KL principali teorici e sperimentali in direzione x ............... 69
Figura 2.3.7 Modi KL principali teorici e sperimentali in direzione y ............... 70
Figura 3.3.1: Griglia modello PLATE ................................................................ 81
Figura 3.3.2: Griglia PLATE con sensori ed attuatori ........................................ 82
Figura 3.3.3: PLATE 9 modi............................................................................... 84
Figura 3.3.4: PLATE 10 modi, m=2*N .............................................................. 86
Figura 3.3.5: PLATE 7 vs 9 modi ....................................................................... 87
Figura 3.3.6: PLATE 5 bande vs 1 banda ........................................................... 87
Figura 4.2.1: griglia TRUSS ............................................................................... 90
Figura 4.2.2: Sezione delle travi del traliccio ..................................................... 91
Figura 4.2.3: Sensori e Attuatori TRUSS............................................................ 93
Figura 4.2.4: Esempio di FrF diretta per la struttura TRUSS ............................. 95
Figura 4.2.5: Dettaglio modi rigidi FrF per struttura TRUSS ............................. 96
Figura 4.2.6: Esempio di sinusoide con campionamento a 5 punti ..................... 97
Figura 4.2.7: FrF diretta vs metodo MF per struttura TRUSS ............................ 99
Figura 4.2.8: Trave doppiamente incastrata ...................................................... 101
Figura 4.2.9: Numerazione travi TRUSS .......................................................... 102
Figura 4.2.10: Funzione di densità modale per la struttura TRUSS ................. 103
Figura 4.2.11: Funzione autovalori banda #1 e #5 struttura TRUSS ................ 107
Figura 4.2.12: Modi necessari per catturare 95% dell'energia della struttura
TRUSS .............................................................................................................. 109
Figura 4.2.13: Risposta TRUSS prendendo meno modi di quelli calcolati ...... 110
Figura 4.2.14: Modo #1 banda #5 per la struttura TRUSS ............................... 111
Figura 4.3.1: Struttura SPACE .......................................................................... 113
Figura 4.3.2: Sensori ed attuatori struttura SPACE .......................................... 113
Figura 4.3.3: Densità modale SPACE ............................................................... 114

6
Figura 4.3.4: FrF SPACE 45 modi .................................................................... 115
Figura 4.3.5: FrF SPACE 70 modi .................................................................... 116
Figura 4.3.6: Funzione autovalori banda #1 e #5 struttura SPACE .................. 117
Figura 4.3.7: Modi necessari per catturare 95% dell'energia della struttura
SPACE .............................................................................................................. 120
Figura 4.3.8: Modo #1 bande #1 e #5 per la struttura SPACE .......................... 121
Figura 4.3.9: FrF SPACE fascia in frequenze superiore ................................... 122
Figura 4.3.10: SPACE fascia in frequenze inferiore ......................................... 123
Figura 4.3.11: SPACE, prova libera .................................................................. 124
Figura 4.3.12: SPACE, prova vincolata ............................................................ 125
Figura 5.2.1: FrF TRUSS usando modi propri fino a 575 Hz ........................... 132
Figura 5.2.2: FrF TRUSS usando modi propri fino a 700 Hz ........................... 133
Figura 5.2.3: FrF TRUSS usando modi propri fino a 825 Hz ........................... 134
Figura 5.2.4: TRUSS, FrF calcolata con 50 modi propri nella banda 575-825 Hz
........................................................................................................................... 135
Figura 5.2.5: TRUSS, FrF calcolata con 70 modi propri nella banda 525-875 Hz
........................................................................................................................... 135
Figura 5.2.6: TRUSS, FrF calcolata con 100 modi propri nella banda 475-925
Hz ...................................................................................................................... 136
Figura 5.3.1: Struttura piramidale ..................................................................... 140
Figura 5.3.2: Andamento dell'energia per struttura piramidale......................... 141
Figura 5.3.3: Energia totale SPACE con modi propri esatti ............................. 144
Figura 5.3.4: Energia totale SPACE con modi propri esatti solo fascia MF .... 145
Figura 5.3.5: Energia totale SPACE con modi Energy Operator ...................... 146
Figura 5.3.6: Energia totale SPACE, dettaglio per ciascuna baia ..................... 147
Figura 5.3.7: Metodo HF applicato a SPACE, Energia totale .......................... 148
Figura A.0.1: Facts su ONERA ......................................................................... 152
Figura A.0.2: Settori scientifici e dipartimenti di ONERA ............................... 153
Figura A.0.3: Technology Readiness Level (TRL) ........................................... 154
Figura B.0.1: Struttura del file di input per MSC.Nastran ................................ 158
Figura B.0.2: Pre e Post processori nell'analisi ad elementi finiti ..................... 160
Figura B.0.3: Sequenze di Soluzione ................................................................ 161

7
INDICE DELLE TABELLE
Tabella 2.3.1 Distribuzione dell'energia per i primi modi del traliccio a 18 baie
............................................................................................................................. 65
Tabella 4.2.1: Modi propri struttura TRUSS ...................................................... 94
Tabella 4.2.2: Frequenze naturali travi TRUSS al di sotto di 825 Hz .............. 102
Tabella 4.2.3: Energia % catturata da ciascun modo per struttura TRUSS ...... 109
Tabella 4.3.1: Energia % catturata da ciascun modo per struttura SPACE ...... 120
Tabella 5.2.1: Numero modi propri struttura TRUSS da 0 Hz ......................... 131
Tabella 5.2.2: Numero modi propri struttura TRUSS rispetto a banda MF ...... 136

8
SOMMARIO
Lo scopo di questo manoscritto é di trattare l’implementazione su MSC.Nastran
di un metodo di riduzione funzionale per strutture a traliccio nel campo delle
medie frequenze, sviluppato da C. Soize. Il progetto é stato sviluppato durante
uno stage di sei mesi presso ONERA a Parigi, sotto la supervisione di E. Savin.
Le principali tematiche affrontate sono state: la comprensione delle fondamenta
teoriche del metodo Energy Operator sviluppato da C. Soize; la revisione e
aggiornamento di una base di programma sviluppato da E. Savin in DMAP, il
modulo di programmazione di MSC.Nastran; la validazione dello stesso su un
modello preliminare ad elementi finiti rappresentante una piastra omogenea,
analizando la qualità dei risultati ed evidenziando i punti critici; l’applicazione
del programma a 2 strutture a traliccio di complessità crescente, valutando di
volta in volta le caratteristiche modali ed energetiche; il confronto del metodo
Energy Operator con l’analisi modale classica ed un metodo per le alte
frequenze sviluppato, sempre presso ONERA, da Y. Le Guennec nell’ambito di
un progetto di Dottorato di Ricerca.
Si é visto come, sebbene il programma DMAP presenti alcuni punti deboli, le
capacità di approssimazione del metodo di C. Soize unite all’estrema facilità del
calcolo dei parametri energetici associati ai modi estratti lo portino ad essere un
efficace strumento per l’analisi dinamica di strutture tridimensionali anisotrope
in un campo, quello delle medie frequenze, dove a tutt’oggi non vi sono metodi
universalmente affermati ed affidabili.
9
1. INTRODUZIONE
1.1. Breve riassunto del lavoro
Lo scopo di questo lavoro di tesi è applicare un metodo di riduzione per
problemi di dinamica strutturale lineare nel campo delle medie frequenze,
utilizzando la base teorica proposta da C. Soize, che si fonda su un approccio
energetico, associata al metodo degli elementi finiti, attraverso il quale
effettuare la discretizzazione spaziale della struttura.
Per fare ciò si è utilizzato un programma in linguaggio DMAP (Direct Matrix
Abstraction Program), il codice utilizzato da MSC.Nastran, scritto da E. Savin
per ONERA (Office National d’Etudes et de Recherches Aérospatiales) nel
2001 e aggiornato alla versione MSC.Nastran 2011 nell’ambito del progetto di
tesi.
Il programma adattato è stato validato utilizzando un modello base di piastra e
successivamente una semplice struttura a traliccio; infine, per l’analisi
conclusiva, si è preso un modello di traliccio a più baie, rappresentativo delle
strutture presenti in campo spaziale.
1.2. Il campo delle medie frequenze
Il motivo principale per cui si è scelto di perseguire l’obiettivo di questa tesi
risiede nel fatto che, sebbene per le basse e alte frequenze esistano metodi di
riduzione già affermati e robusti, per la fascia delle medie frequenze non vi sono
ancora delle tecniche di soluzione pienamente affidabili.
Occorre però innanzitutto capire com’è possibile definire in modo empirico il
campo delle medie frequenze [1]; esso può essere visto come quella fascia dove

10
la struttura non presenta né un comportamento modale come accade nelle basse
frequenze, né quello diffusivo tipico delle alte frequenze.
Da un punto di vista grafico, si possono caratterizzare a grandi linee quali siano
le 3 fasce di frequenza attraverso le quali suddividere idealmente lo spettro di
risposta di una struttura. Se si prende una struttura qualsivoglia e le si applica un
carico, misurando le funzioni di risposta in frequenza (FrF) di diversi punti del
sistema si può notare che, alle basse frequenze, l’andamento delle FrF è
sostanzialmente lo stesso, segno che l’energia vibratoria del carico si propaga
pressoché uniformemente all’interno della struttura e non rimane localizzata
vicino al punto di eccitazione. Per frequenze alte, invece, si nota che l’energia
vibratoria rimane localizzata vicino al punto di eccitazione e si diffonde solo
debolmente nelle altre parti della struttura. Per le medie frequenze, infine,
l’andamento generale è che i livelli di energia dei vari punti di misura sono
comparabili tra loro ma leggermente inferiori rispetto a quelli di un ipotetico
sensore co-locato; questo significa che l’energia vibratoria rimane parzialmente
localizzata vicino al punto di eccitazione e il resto si diffonde in pressoché tutti i
punti della struttura.

11
Figura 1.2.1 Esempio di densità di energia meccanica di una struttura
I 3 domini in frequenza appena descritti sono caratterizzabili anche attraverso la
funzione di densità modale: alle basse frequenze la densità modale risulta molto
bassa; alle alte frequenze la densità modale esibisce un valore alto e
generalmente uniforme; dove invece la funzione di densità modale presenta
importanti variazioni, ci si trova nel campo delle medie frequenze.
Infatti, le vibrazioni di una struttura complessa sono caratterizzate dalla
sovrapposizione di alcuni modi globali e pacchetti di modi locali addensati
(clusters), che possiedono un’influenza non trascurabile sul comportamento sia
globale sia locale della struttura nella stretta banda di frequenza dove si trovano.
Per esempio, le vibrazioni di strutture a traliccio tridimensionali tipicamente
esibiscono questo comportamento, dovuto ai molti e altamente concentrati modi
propri associati alla natura ripetitiva delle componenti del traliccio, anche a
frequenze relativamente basse.

12
In campo spaziale, l’esempio forse più famoso e caratteristico è la struttura
principale della International Space Station (ISS), che presenta proprio una
struttura a traliccio lungo la sua dimensione maggiore, raffigurata in Figura
1.2.2.
Figura 1.2.2 Immagine della struttura a traliccio della ISS
Proprio per questo motivo, durante il lavoro di tesi si è scelto di operare su
strutture di complessità crescente, fino ad arrivare a SPACE, una struttura che
potesse assomigliare al traliccio portante della ISS (Figura 1.2.3):

13
Figura 1.2.3: SPACE, la struttura scelta per le analisi
All’atto pratico, per l’analisi della risposta lineare della struttura alle medie
frequenze si hanno tipicamente 3 strategie di modellazione [1]:
Estendere i classici metodi numerici utilizzati per le basse frequenze,
tipicamente il modello ad elementi finiti, alle medie frequenze;
Estendere alle medie frequenze i metodi di analisi adottati per le alte
frequenze;
Utilizzare un metodo di riduzione appositamente costruito per il campo
di frequenze intermedio.
Riguardo i metodi di soluzione per le basse frequenze, zona laddove le funzioni
di risposta in frequenza esibiscono modi distinti con sovrapposizione modale
dovuta ad effetti dissipativi trascurabile, il metodo degli elementi finiti (FEM),
in congiunzione con lo sviluppo basato sui modi propri, rappresenta uno
strumento molto efficiente per costruire un modello dinamico ridotto del sistema
[2]. Il modello ridotto è efficacemente costruito risolvendo un problema agli
autovalori generalizzato, che risulta inoltre essere ben posto. È quindi sufficiente
il solo sottospazio dominante della struttura, cioè quello costituito da pochi
autovalori e i loro corrispondenti autovettori, per sintetizzare il modello ridotto
in accordo con l’approccio modale proprio.
Per le alte frequenze, invece, lo Statistical Energy Analysis (SEA) è un già ben
affermato metodo di riduzione per l’analisi della risposta di sistemi strutturali

14
lineari. Tramite questo approccio, il sistema completo è modellato come un
insieme di sottosistemi, a ciascuno dei quali viene assegnato un singolo
attributo, nominalmente la sua energia totale media. Nel SEA, la risposta totale
del sistema è caratterizzata dallo scambio di energia che si verifica tra i diversi
sottosistemi. La validità di questo approccio necessita che ogni sottosistema
contenga un grande numero di modi risonanti, condizione che si manifesta
facilmente alle alte frequenze vista la presenza di una densità modale uniforme.
Nella banda delle medie frequenze, nessuna delle 2 strategie di riduzione
rappresenta una completamente affidabile e affermata soluzione per l’analisi
dinamica dei sistemi strutturali.
Infatti l’approccio tradizionale basato sul FEM necessiterebbe di un modello
computazionale eccessivamente grande per catturare le caratteristiche di
vibrazione a corta lunghezza d’onda del sistema. Nel calcolo della risposta totale
parteciperebbero un grande numero di modi propri, rendendo l’analisi modale
impraticabile. D’altra parte, la presenza di una densità modale non uniforme nel
campo di frequenze preso in considerazione preclude a priori l’applicazione del
SEA.
Un’altra difficoltà nel trattare problemi alle medie frequenze è che la risposta
del sistema diventa sempre più sensibile ai dettagli ed alle imperfezioni
geometriche a mano a mano che si sale in frequenza, così come alle
discontinuità dovute all’andamento delle vibrazioni a corta lunghezza d’onda.
Di conseguenza risulta difficile costruire un modello matematico preciso che
catturi un comportamento così tanto complesso della risposta del sistema.
Un effetto della variabilità dei parametri è particolarmente drammatico nelle
strutture periodiche da un punto di vista spaziale, come appunto la già citata
struttura primaria della ISS o, pensando ad esempi d’ingegneria civile, le gru
usate per la costruzione di edifici: le funzioni di risposta in frequenza di queste
strutture presentano densi clusters di modi propri, dove l’energia vibratoria si
propaga liberamente senza attenuazione; questo effetto, spesso di natura
indesiderata, può essere risolto semplicemente introducendo delle irregolarità
che rompano la periodicità, consentendo di confinare l’energia vibratoria in una
parte specifica della struttura.
In questo contesto, risulta molto promettente la metodologia proposta da C.
Soize per la costruzione di un modello ridotto per la risoluzione di sistemi

15
tridimensionali generici nel campo delle medie frequenze. Esso si basa sulla
definizione di un operatore energetico (matrice simmetrica definita positiva) per
una frequenza fissata e il cui sottospazio degli autovalori consente la costruzione
di un modello ridotto nel dominio delle frequenze particolarmente efficiente.
Il modello sembra molto promettente per la risoluzione della dinamica di
modelli ad elementi finiti su grande scala.

16
2. CENNI TEORICI
2.1. Introduzione
Il seguente capitolo presenta le nozioni teoriche su cui poggia il programma
implementato in MSC.Nastran utilizzato per l’analisi numerica. Nel paragrafo
2.2 è descritto il metodo proposto da C. Soize per la soluzione di problemi
dinamici di strutture tridimensionali, lineari e dissipative nel campo delle medie
frequenze. Successivamente, nel paragrafo 2.3, viene presentata una rassegna
dei metodi Proper Orthogonal Decomposition (POD), concentrandosi sul
metodo Karhunen-Loeve (KL), di cui viene fornita una derivazione sia nel
dominio del tempo, sia in quello delle frequenze. Infine, il paragrafo 2.4 offre un
breve raffronto tra i 2 metodi, evidenziando sia i punti di contatto che le
differenze.
2.2. IL METODO DI SOIZE
2.2.1. Introduzione
Il metodo proposto da C. Soize (cfr. [3]) rappresenta un approccio teorico per la
costruzione di un modello ridotto, per lo spettro delle medie frequenze (MF),
valido per problemi di dinamica strutturale lineari e dissipativi, nell’ambito dello
studio della dinamica di strutture tridimensionali e anisotrope.
Il punto focale del metodo è che esso si basa su un principio energetico che
consente di evitare l’utilizzo della base dei modi propri di vibrare ricavabili dal
sistema conservativo associato [4].
Teoricamente, per lo studio delle vibrazioni lineari di una struttura deformabile,
viscosa, anisotropa e debolmente smorzata, è sufficiente conoscere

17
esplicitamente lo spettro delle frequenze proprie del sistema non
smorzato e la base modale .
Nella pratica, la base modale non è nota a priori e deve essere calcolata
numericamente; di conseguenza per poter risolvere il problema delle vibrazioni
lineari alle basse frequenze si distinguono 3 possibili casi:
1. Effettuare l’integrazione numerica diretta delle equazioni nel dominio
del tempo;
2. Effettuare l’integrazione diretta nel tempo delle equazioni approssimate
facendo uso della base modale troncata , ovvero
compiendo la sintesi modale nel dominio temporale;
3. Effettuare il calcolo della funzione di risposta in frequenza (FrF) , che
può essere ricavata:
a) attraverso la base modale troncata
(2.1)
ovvero facendo la sintesi modale nel dominio delle frequenze;
b) attraverso la risoluzione diretta, calcolando per ogni valore di
considerato
(2.2)
Dove M, C, K rappresentano rispettivamente gli operatori di
massa, smorzamento e rigidezza.
Nel contesto della presentazione della metodologia di Soize, ci si interessa del
dominio delle medie frequenze, che viene definito come quel dominio dove le
frequenze di eccitazione non sono sufficientemente alte per poter utilizzare a
priori dei metodi asintotici, né sufficientemente basse affinché la risposta possa
essere considerata a priori di tipo modale. Questo dominio è tale per cui
intervengono nella risposta un numero molto elevato di modi propri e la densità
modale può essere a priori molto grande.

18
Si nota perciò che per il dominio delle medie frequenze la discretizzazione della
struttura con gli elementi finiti deve essere sufficientemente fine; questo
comporta la presenza di sistemi discretizzati aventi un gran numero di gradi di
libertà.
Applicati al dominio delle medie frequenze, le strategie di soluzione descritte in
precedenza e utilizzate per le basse frequenze conducono alle situazioni
seguenti:
per frequenze abbastanza elevate, il metodo 1. necessita un tempo di
integrazione molto piccolo, senza parlare dei problemi di smorzamento
numerico che possono verificarsi in alcuni casi;
i metodi 2. e 3.a) necessitano il calcolo dei modi propri di vibrare che
comporta avere un sistema di ordine molto elevato;
Il metodo 3.b) necessita la risoluzione di un sistema lineare complesso
avente un gran numero di equazioni, poiché il calcolo della matrice
(2.3)
va fatta per ciascuna .
Tuttavia, se il calcolo non dovesse essere fatto che per qualche valore di
soltanto, questo metodo risulterebbe allora molto efficace nel dominio delle
medie frequenze. Questo è il caso di eccitazione su una banda stretta; ma se
l’eccitazione fosse su una banda non stretta, bisognerebbe considerare a priori
un numero elevato di valori per una identificazione dinamica.
Inoltre si nota che il metodo 3.b) porta normalmente a considerare un numero
elevato di valori poiché non si sa nulla a priori dell’evoluzione dell’operatore
in funzione delle variazioni di nel dominio delle frequenze studiate.
Soize propone allora un nuovo metodo numerico di risoluzione per il dominio
delle medie frequenze, il quale si basa sulle ipotesi seguenti:
Per il dominio delle medie frequenze, lo stato vibratorio del sistema è
caratterizzato dalla banda di frequenza e non più dai valori discreti della
frequenza;
La funzione di risposta in frequenza è sostituita da una funzione di
risposta in frequenza calcolata a partire dalla banda in frequenza;

19
La risposta all’istante di una osservazione del sistema in vibrazione è
rimpiazzata dalla risposta in media sulla banda, ovvero la radice quadrata
dell’energia della risposta sulla banda;
Il concetto di appropriazione di un modo proprio alla sua frequenza
propria (nozione tipicamente utilizzata per le basse frequenze) è
sostituita dalla ricerca degli stati vibratori estremi della banda in
frequenza;
Si conserva la nozione di densità modale per la banda di frequenza, che
può essere calcolata senza calcolare lo spettro delle
frequenze proprie del sistema non smorzato associato.
Le grandezze che vengono costruite attraverso l’approccio di Soize sono tutte
deterministiche e permettono:
d’identificare la dinamica a media frequenza di un mezzo elastico lineare
viscoso, anisotropo e di geometria qualsiasi;
di studiarne la risposta ad un’eccitazione deterministica qualsiasi
all’interno del dominio delle medie frequenze o di un’eccitazione
stocastica stazionaria della quale la densità spettrale di potenza è
concentrata su una banda di media frequenza;
di studiare la propagazione spaziale delle vibrazioni all’interno del
mezzo elastico;
di determinare, per una banda in frequenza fissata, la ripartizione
spaziale delle forze di eccitazione;
eventualmente, di calcolare la densità modale.
Questo metodo si avvale del concetto di banda stretta nel dominio delle medie
frequenze (MF) , per cui è possibile analizzare qualsiasi banda di frequenza
come unione finita di bande strette MF [3]. L’utilizzo di elementi finiti per la
discretizzazione spaziale, unito a questo metodo di soluzione, permette di
risolvere efficacemente un buon numero di problemi vibrazionali di strutture
tridimensionali complesse.
Inoltre viene introdotto un operatore simmetrico definito positivo , detto
energy operator, da cui vengono estratti gli stati vibratori della struttura che deve
essere caratterizzata.

20
Il metodo proposto, essendo adattato a ciascuna banda MF , permette alle
matrici di smorzamento e rigidezza di essere dipendenti dalla frequenza
(materiale viscoelastico).
Nel seguito della presentazione del metodo proposto da Soize, vengono descritti
la formulazione differenziale del problema da risolvere nel dominio delle
frequenze e la sua formulazione variazionale, mostrando che esiste un’unica
soluzione e introducendo la funzione di risposta in frequenza del sistema
dinamico; successivamente viene descritto come costruire il modello ridotto,
definendo l’energy operator , dimostrando che esso è un operatore traccia
simmetrico definito positivo nello spazio di Hilbert e che la sua analisi spettrale
fornisce una base completa, nel campo degli spostamenti ammissibili, costituita
dai suoi autovettori. Il modello ridotto viene di conseguenza introdotto usando la
proiezione alla Ritz-Galerkin della formulazione variazionale sul sottospazio
degli autovalori dominanti dell’operatore . Infine vengono presentate
l’approssimazione a dimensione finita del caso continuo che permette di portare
avanti il calcolo per il caso generale e una procedura efficiente per la
costruzione del sottospazio dominante usando il metodo dell’iterazione dei
sottospazi.
La trattazione della parte teorica del metodo di Soize riprende le pubblicazioni
fatte dal medesimo autore, riferimenti [3] e [4].
2.2.2. Il problema differenziale e la sua soluzione debole
Nella scrittura delle equazioni del problema strutturale, vengono prese in
considerazione le vibrazioni lineari (formulate nel dominio delle frequenze ) di
una struttura tridimensionale attorno ad una condizione di equilibrio [3].
Sia un dominio aperto di , occupato dalla struttura fatta di materiale
viscoelastico e in una condizione di equilibrio statico. Sia il
contorno che viene assunto come sufficientemente regolare e tale per cui
.
Si prende in considerazione il campo di spostamento in ciascun
punto , espresso in coordinate cartesiane. Nella parte del

21
contorno la struttura è vincolata ( ) mentre nella parte è libera di
muoversi.
Si introduce una banda stretta MF che è definita come un intervallo compatto
:
(2.4)
In cui è la frequenza centrale della banda e è la larghezza della banda
tale che
(2.5)
A viene associato l’intervallo definito come:
(2.6)
Sono presenti campi esterni di forze volumetriche e superficiali applicate a e
su , scritte rispettivamente come e , in cui
è una funzione di verso , avente supporto compatto
, continua in , che verifica e tale per cui per
ogni in .
Per ogni in il problema in forma differenziale è scritto come:
(2.7)
22
Dove è la densità che è assunta essere una funzione limitata in e
.
Per un materiale a comportamento lineare viscoelastico, il tensore di sforzo è
così scritto:
(2.8)
In cui
è il tensore di deformazione linearizzato.
La formulazione variazionale viene costruita a partire dalla sua forma
differenziale.
Si introduce lo spazio di Hilbert ,
accompagnato dal suo prodotto scalare
e dalla
norma
.
Sia V lo spazio di Hilbert che rappresenta il set di campi di spostamento
ammissibili con valori in
con il suo prodotto scalare =
e la norma
associata
.
Per tutte le in , si assume che e ,
quindi per ogni in , la forma antilineare su , rappresentante le
forze esterne, è definita come
(2.9)
continua in .

23
Per ogni in , la forma sesquilineare su , che
rappresenta l’operatore di rigidezza dinamica, è definito come
(2.10)
Il termine di massa, il quale è definito come
(2.11)
è una forma Hermitiana definita positiva, continua su e, di conseguenza,
continua su .
Le forme sesquilineari di smorzamento e di rigidezza
sono definite come
(2.12)
(2.13)
Per le consuete proprietà dei coefficienti meccanici e le
sopracitate forme sesquilineari sono Hermitiane definite positive e continue su
.
Si può quindi dedurre l’espressione dell’operatore di rigidezza dinamica
(2.14)
24
dove sono rispettivamente gli operatori di massa, smorzamento
e rigidezza.
Si può infine esprimere la versione variazionale del problema differenziale: per
ogni in , trovare appartenente a tale che
(2.15)
L’equazione corrispondente in termini di operatori è
(2.16)
Grazie al teorema di Lax-Milgram, si dimostra che il problema variazionale ha
soluzione e che questa è unica; da ciò si deduce che per ogni in
l’operatore è invertibile
(2.17)
La funzione da in è chiamata funzione di risposta in
frequenza valutata dall’operatore.
La soluzione può essere scritta come
(2.18)
dove la soluzione verrà chiamata vibrazione indotta dall’eccitazione
.

25
2.2.3. Costruzione del modello ridotto
Per ogni in , è un operatore non limitato in , il cui dominio
è tale che
(2.19)
Sia una restrizione dell’operatore nel dominio .
Quindi appartiene a ed è invertibile, per cui è definibile
l’operatore limitato che rappresenta l’inversa di in con
dominio .
Sia ora appartenente ad ed indipendente da . Sia la vibrazione dovuta
all’eccitazione . Si ha allora
(2.20)
Viene quindi definita l’energia di vibrazione come il doppio del
valore dell’energia cinetica totale
(2.21)
Di conseguenza, risulta coerente introdurre la seguente definizione dell’Energy
Operator relativo alla banda :
(2.22)

26
dove e .
Dalle relazioni precedenti si deduce che
(2.23)
si può notare che l’Energy Operator è un operatore intrinseco che dipende da
e , ma non dalle parti spaziali e dell’eccitazione.
L’Energy Operator può essere caratterizzato come un operatore traccia di
simmetrico definito positivo il cui dominio è
(2.24)
che può essere scritto come
(2.25)
in cui è il complesso coniugato di .
può essere anche scritto come
(2.26)
Visto che , la sua analisi spettrale può essere dedotta dall’analisi
spettrale degli operatori compatti simmetrici in spazi di Hilbert. Di conseguenza,
ha un numero finito di autovalori positivi con molteplicità finita, ad
eccezione dello zero, . I corrispondenti autovettori sono tali
che

27
(2.27)
Dato che è un operatore traccia simmetrico definito positivo, si ha che
(2.28)
Il modello ridotto applicato alla banda è ottenuto usando la proiezione alla
Galerkin-Ritz della formulazione variazionale nel sottospazio di ,
caratterizzato dalla base che corrisponde agli maggiori autovalori
dell’energy operator . Sia l’unica soluzione
dell’equazione (2.15), data dall’equazione (2.18), e sia
la proiezione di su ,
(2.29)
in cui . Allora si deduce che, per ogni appartenente a ,
è la soluzione dell’equazione
(2.30)
dove è una matrice simmetrica e complessa definita come
(2.31)
e dove è tale che

28
(2.32)
Il set di equazioni da (2.29) a (2.32) costituiscono il cosiddetto modello ridotto,
adattato alla banda in frequenza , del sistema dinamico descritto dalle
equazioni (2.15) o (2.16).
Per ogni in , la matrice è invertibile,
(2.33)
e la soluzione dell’equazione (2.31) può essere scritta come
(2.34)
2.2.4. Approssimazione a dimensione finita
La costruzione esplicita degli autovettori dell’Energy Operator
non può essere ottenuta nel caso generale. Deve quindi essere introdotta
un’approssimazione a dimensione finita di e gli autovettori
di (associati agli autovalori più alti) costituiscono l’approssimazione di
. Questa approssimazione è ottenuta usando il metodo Ritz-Galerkin
considerando il sottospazio di dimensione finita spaziato dalla
famiglia di funzioni indipendenti di valutate in .
Per la proiezione della formula variazionale, la riduzione della forma antilineare
da a è rappresentata da dove
è tale che
(2.35)

29
La riduzione della forma sesquilineare da a è
rappresentata dalla matrice simmetrica complessa
(2.36)
Usando l’equazione (2.10), la matrice può essere scritta come
(2.37)
Dove sono matrici reali simmetriche definite positive
tali che
(2.38)
(2.39)
(2.40)
Per ogni in , la matrice simmetrica è invertibile e si ha
(2.41)
La proiezione dell’operatore su è scritta come

30
(2.42)
in cui è una matrice reale e simmetrica definita positiva tale che
(2.43)
(2.44)
Si arriva alla forma finale della matrice ridotta dell’Energy Operator
(2.45)
Considerando la forma spettrale dell’Energy Operator proiettato su , siano
e
gli autovalori e corrispondenti auto vettori di ,
(2.46)
si nota che gli autovalori sono numeri reali positivi e che i corrispondenti
autovettori formano una base ortonormale in per il prodotto interno di
(2.47)
Si ha quindi

31
(2.48)
e l’Energy Operator può essere scritto come
(2.49)
Si dimostra che gli autovalori
dell’operatore sono soluzione del
problema agli autovalori generalizzato simmetrico
(2.50)
in cui e sono matrici reali e simmetriche definite positive, tali
che
(2.51)
(2.52)
Gli autovettori formano una base di e verificano le proprietà di
ortogonalità
(2.53)
(2.54)
Gli autovettori possono essere scritti come

32
(2.55)
in cui
. Si ha quindi
(2.56)
A questo punto si può definire un modello ridotto adattato alla banda in
frequenza .
Si considera la medesima costruzione introdotta dalle equazioni da (2.29) a
(2.32), con l’accortezza di sostituire gli autovettori di con quelli di . Sia
(generalmente ). Sia l’unica soluzione dell’equazione
(2.15) data dall’equazione (2.18). Quindi, il modello ridotto adattato alla banda
in frequenza è definito come la proiezione di sul sottospazio
spaziato dagli autovettori
che corrispondono agli
più alti autovalori
dell’operatore ,
(2.57)
Per ogni appartenente a , la proiezione è scritta come
(2.58)
in cui
è la soluzione dell’equazione lineare
(2.59)

33
dove è una matrice simmetrica e complessa definita come
(2.60)
e dove
è tale che
(2.61)
Il set di equazioni da (2.58) a (2.61) costituisce l’approssimazione a dimensione
finita del modello ridotto introdotto dalle equazioni da (2.29) a (2.32) e adattato
alla banda in frequenza .
Per ogni in , la matrice è invertibile,
(2.62)
e la soluzione dell’equazione (2.59) può essere scritta come
(2.63)
Si può a questo punto valutare l’espressione delle matrici del modello ridotto:
sia una matrice reale le cui colonne siano gli autovettori
corrispondenti agli maggiori autovalori
del
problema agli autovalori generalizzato simmetrico definito dall’equazione (2.50)
(2.64)

34
Sostituendo l’equazione (2.55) all’interno delle equazioni (2.60) e (2.61) porta a
(2.65)
(2.66)
In cui la matrice e il vettore sono definiti dalle equazioni (2.37) e
(2.35) rispettivamente.
In tutte le considerazioni fatte precedentemente, si è assunto che
fosse indipendente da , di conseguenza e
sono indipendenti da . Tuttavia, dalle equazioni (2.35) e
(2.61) si deduce che e .
L’energia di
è data da
(2.67)
si dimostra che la stessa energia di
data dall’equazione (2.67) può
anche essere espressa come
(2.68)
dove , definita dall’equazione (2.35), è indipendente da e dove è una
matrice reale positiva e simmetrica tale che
(2.69)

35
(2.70)
in cui, per ogni in , è una matrice reale e simmetrica
definita positiva tale che
(2.71)
dove
Si prende ora in considerazione il sottospazio dominante dell’Energy Operator e
si propone un criterio per il calcolo dell’ordine del modello ridotto.
Prendendo , l’equazione (2.67) diventa
(2.72)
dove è la proiezione di su . Si ha
(2.73)
Dalle equazioni (2.67), (2.72) e (2.73) si deduce che
(2.74)
Dato che è una sequenza decrescente di numeri positivi al tendere di a
, se è sufficientemente grande allora esisterà un tale per cui

36
(2.75)
Si può allora definire il sottospazio degli autovalori dominante: se è tale
che l’equazione (2.75) è soddisfatta, allora il sottospazio è chiamato
sottospazio degli autovalori dominante dell’operatore , corrispondente agli
maggiori autovalori
e è l’ordine del modello ridotto.
2.2.5. Costruzione del sottospazio dominante degli autovalori
usando il metodo di iterazione dei sottospazi
Il modello ridotto definito dalle equazioni da (2.58) a (2.61) richiede la
costruzione del sottospazio degli autovalori dominanti di , cioè il calcolo
degli autovettori in corrispondenti ai maggiori autovalori
del problema agli autovalori generalizzato simmetrico definito
dall’equazione (2.50). Visto che è grande e , sia il metodo per
iterazione dei sottospazi che il metodo di Lanczos possono essere utilizzati. La
struttura algebrica della matrice definita dall’equazione (2.43) mostra che
l’uso di un metodo per iterazione dei sottospazi consente di costruire un metodo
di soluzione molto efficiente.
Sia la dimensione del sottospazio usato per le iterazioni, tale che
(nella pratica ). Il problema agli autovalori generalizzato
simmetrico, definito dalle equazioni (2.50), (2.53) e (2.54) è riscrivibile in forma
matriciale come
(2.76)
dove è una matrice reale tale che
37
(2.77)
e è la matrice reale diagonale degli autovalori. Si hanno quindi da
calcolare gli maggiori autovalori e i corrispondenti autovettori
costituiti dalle prime colonne della matrice . Visto che la formula del
metodo per iterazione dei sottospazi è adattata per calcolare gli autovalori più
bassi, le equazioni (2.76) e (2.77) vengono trasformate come segue:
(2.78)
con
(2.79)
(2.80)
Di conseguenza si devono calcolare gli più bassi autovalori e associati
autovettori del problema agli autovalori simmetrico definito dalle equazioni
(2.78) e (2.79).
Utilizzando l’equazione (2.52) e sfruttando il fatto che è invertibile, il
classico algoritmo del vettore di iterazione dei sottospazi applicato alle
equazioni da (2.78) a (2.80) può essere riscritto come segue.
1. Inizializzazione:
(2.81)
in cui è la matrice nulla , è la matrice identità e
è una matrice reale calcolata attraverso una selezione di
vettori di iterazione iniziali (costruiti, ad esempio, usando il metodo di

38
Lanczos). Le colonne della matrice devono essere un set di
vettori algebricamente indipendenti di .
2. Per
(2.82)
in cui e sono matrici reali e è una matrice
reale . Si calcolano le matrici reali e tali che
(2.83)
(2.84)
(2.85)
(2.86)
in cui e sono matrici reali . Si risolve quindi il
problema agli autovalori generalizzato simmetrico proiettato di
dimensione
(2.87)
con
(2.88)
Si calcola . Si misura la convergenza tramite la relazione
(2.89)

39
3. Quando la convergenza è raggiunta, sono le prime colonne
della matrice reale , che è calcolata come
(2.90)
Se si guarda l’algoritmo appena proposto, sembrerebbe che il calcolo della
matrice sia necessario. In realtà, l’equazione (2.84) mostra che bisogna
soltanto calcolare la matrice reale tale che
(2.91)
in cui è una matrice reale data. Questa procedura, eseguita
direttamente nel dominio delle frequenze, porta ad avere una stima del numero
di operazioni
(2.92)
dove è la semiampiezza della banda media delle matrici simmetriche ,
e .
La procedura seguente, fatta in modo indiretto nel dominio delle frequenze, è
invece più efficiente. Visto che è una matrice reale, può essere facilmente
verificato che
(2.93)
dove è una matrice complessa che è l’unica soluzione delle
equazioni

40
(2.94)
(2.95)
in cui è una funzione da a tale che, per ogni in
(2.96)
la stima del numero delle operazioni necessarie risulta
(2.97)
Di conseguenza il guadagno rispetto alla procedura diretta è
(2.98)
Per esempio, nel contesto degli elementi finiti, se , ,
e allora il guadagno è approssimativamente 60.
Esiste anche un’altra procedura, basata sull’uso del metodo di soluzione MF nel
dominio del tempo e illustrata in [4], più efficiente ancora del metodo di
soluzione indiretta nel dominio delle frequenze. Esso richiede soltanto la
fattorizzazione di una matrice complessa la cui semiampiezza di banda
sia . Conseguentemente, la memoria interna necessaria per questa procedura è
di gran lunga minore di quella della procedura indiretta nel dominio delle
frequenze per cui è necessario avere simultaneamente in memoria
fattorizzazioni.

41
Per definire il segnale d’ingresso, si comincia con l’analisi della funzione
definita dall’equazione (2.96); si deduce che e la sua
trasformata inversa di Fourier è
(2.99)
Essa appartiene a e può essere scritta come
(2.100)
La funzione appartiene a e ha come trasformata di Fourier
(2.101)
che è tale per cui
, dove denota un
intervallo compatto di
(2.102)
La funzione è il segnale LF (low frequency, a bassa frequenza)
associato al segnale MF a banda stretta [4]. Se per ogni
appartenente a si ha , allora si scrive come
e per
(2.103)

42
in cui , e .
A questo punto si può introdurre l’approssimazione relativa alla banda ,
assumendo che per ogni in si possa scrivere , dove
è una matrice complessa invertibile
(2.104)
in cui e sono matrici reali simmetriche indipendenti dalla
frequenza
(2.105)
Di conseguenza, si ha con
(2.106)
e le equazioni (2.41), (2.43) portano a
(2.107)
La matrice viene calcolata usando le equazioni definite all’interno della
procedura indiretta nel dominio delle frequenze, ovvero usando l’equazione
(2.93), ma le equazioni (2.94) e (2.95) devono essere rimpiazzate da
(2.108)
(2.109)

43
Da questo punto di partenza è possibile dedurre le equazioni MF nel dominio del
tempo. Siano e funzioni integrabili al quadrato tali che
(applicando la trasformata inversa di Fourier)
(2.110)
Dalle equazioni (2.99), (2.104), (2.108) e (2.109) si deduce che e
verificano le equazioni MF nel dominio del tempo
(2.111)
(2.112)
Alle equazioni MF nel dominio del tempo è possibile associare delle equazioni a
bassa frequenza LF. Siano e segnali LF associati ai segnali MF e
rispettivamente, tali che
(2.113)
Di conseguenza, e sono funzioni integrabili al quadrato
e allo stesso modo le loro trasformate di Fourier
(2.114)

44
Sostituendo nelle equazioni (2.111) e (2.112) e usando l’equazione (2.100) si
ricavano le equazioni LF nel dominio del tempo associate alle equazioni MF
(2.111) e (2.112)
(2.115)
(2.116)
in cui le matrici simmetriche complesse e sono scritte come
(2.117)
(2.118)
Infine, è possibile esprimere la matrice usando la soluzione delle equazioni
LF associate nel dominio del tempo. Siano e funzioni
che verificano le equazioni (2.115) e (2.116). Dalle equazioni (2.93) e (142) si
deduce che . Usando l’equazione (2.114) per si
arriva a
(2.119)
Per concludere la trattazione del metodo proposto da C. Soize, viene suggerito
una possibile procedura di soluzione.
Le equazioni LF associate (2.115) e (2.116) possono essere risolte usando un
metodo di integrazione iterativo implicito e incondizionatamente stabile, come
ad esempio il metodo di Newmark o il -metodo di Wilson.

45
Visto che le equazioni (2.115) e (2.116) hanno lo stesso operatore differenziale
, è necessario fattorizzare soltanto una matrice
complessa simmetrica .
Si ha la seguente procedura:
Costruzione della sequenza per con
e ottenuta risolvendo l’equazione (2.115) per con
le condizioni iniziali .
Costruzione della sequenza per ottenuta
risolvendo l’equazione (2.116) per con le condizioni iniziali
Per dettagli riguardanti il metodo di soluzione MF, come i valori tipici di ,
si rimanda a [4].
Il numero stimato di operazioni necessarie per risolvere il problema MF (usando
il metodo di Newmark) risulta essere
(2.120)
Di conseguenza, il guadagno rispetto alla procedura indiretta nel dominio delle
frequenze è
(2.121)
Per esempio, nel contesto degli elementi finiti, se , ,
e allora il guadagno è approssimativamente
.

46
2.3. LA PROPER ORTHOGONAL DECOMPOSITION
2.3.1. Introduzione
Il metodo POD (Proper Orthogonal Decomposition o Decomposizione
Ortogonale Propria) è un metodo potente ed elegante per l’analisi di dati che
punta all’ottenimento di sistemi approssimati di dimensioni contenute
riguardanti processi a molti gradi di libertà [5]. Il metodo POD fornisce una base
per la decomposizione modale di un insieme di funzioni, come ad esempio
quelle ottenute attraverso esperimenti o simulazioni numeriche.
La caratteristica più rilevante del POD è l’ottimalità: esso fornisce la modalità
più efficace di catturare le componenti dominanti di un processo a dimensione
infinita con solamente un numero finito di “modi”.
Sono 3 i metodi principali riconducibili al POD: l’analisi in componenti
principali (PCA), la decomposizione ai valori singolari (SVD) e la
decomposizione Karhunen-Loève (KLD). Nella sostanza di queste applicazioni,
il POD è utilizzato per analizzare dati sperimentali con l’obiettivo di estrarne le
caratteristiche dominanti. Il POD viene usato per ottenere descrizioni
approssimate e di ordine ridotto di flussi di fluidi turbolenti, di vibrazioni
strutturali e di sistemi dinamici caotici.
L’analisi in componenti principali (PCA) ha come idea centrale quella di ridurre
la dimensione di un set di dati che consiste in un grande numero di variabili
correlate contenendo allo stesso tempo il più possibile la variazione presente
nelle misurazioni. Questo obiettivo è ottenuto trasformando le variabili originali
in un nuovo set di variabili, le componenti principali, che sono scorrelate tra loro
e sono ordinate in modo che le prime includano la maggior parte della
fluttuazione presente in tutte le variabili originali.
La decomposizione ai valori singolari (SVD) può essere vista come l’estensione
della decomposizione agli autovalori per il caso di matrici non quadrate. Per ciò
di cui la decomposizione ortogonale propria si occupa, la SVD può anche essere
vista come una estensione della decomposizione alle matrici non simmetriche.
La decomposizione Karhunen-Loève (KLD) è invece l’estensione della PCA al
caso di spazi di dimensione infinita, come ad esempio lo spazio delle funzioni
continue in tempo. La KLD utilizza funzioni ad un solo parametro invece che

47
vettori e funzioni a 2 parametri per rappresentare l’autocorrelazione invece che
usare matrici. La KLD può essere estesa facilmente a processi a tempo discreto.
In termini di ottimalità, la KLD presenta le stesse proprietà di ricostruzione ai
minimi quadrati e massimizzazione della varianza che possiede la PCA.
Nel contesto di questo lavoro di tesi, viene focalizzata l’attenzione sulla
decomposizione Karhunen-Loève, di cui viene presentata una descrizione
matematica, tratta da vari articoli citati in bibliografia.
2.3.2. Il metodo Karhunen-Loève
Nonostante autovalori e autovettori di sistemi lineari semplici siano ben noti ed
usati in tipiche analisi modali per estrarre le caratteristiche dinamiche a bassa
frequenza, il problema agli autovalori può essere estremamente difficoltoso per
problemi più generali o complessi [6]. Per risolvere problemi di dinamica
strutturale dove vengono individuati modi propri di vibrare non smorzati, risulta
necessario avvalersi di potenti calcolatori per risolvere problemi agli autovalori
di larga scala. Il costo computazionale però diventa proibitivamente elevato
quando si ha a che fare con matrici di ordine elevato, sparse e non simmetriche.
La decomposizione Karhunen-Loève (KLD) è particolarmente utile in molte
applicazioni per produrre un nuovo set di autovettori per il calcolo vibrazionale
o per problemi di interazione fluido-struttura.
Vi sono parecchi vantaggi derivanti dall’uso del KLD rispetto all’analisi agli
autovalori convenzionale:
Il KLD utilizza un metodo detto a snapshot, dove il problema di ottenere
gli autovettori di un sistema di ordine elevato si riduce a ricavare gli
autovettori di matrici dell’ordine di ;
Il metodo produce sempre modi reali e ottimi a prescindere dalle
caratteristiche di smorzamento del sistema in considerazione;
Il metodo è un approccio a risposta diretta che non richiede un modello
dinamico che descriva il sistema; di conseguenza può essere applicato
sia a modelli analitici tanto quanto a quelli sperimentali;
Risolvendo il sistema lineare insieme a quello aggiunto, è possibile
ricostruire gli autovettori del sistema originale.
48
Il metodo KLD può servire a 2 scopi principali [7]:
ridurre l’ordine di un problema tramite la proiezione di dati di grandi
dimensioni in uno spazio di ordine più piccolo;
rivelare strutture caratteristiche inaspettate ma rilevanti, nascoste nei dati
a disposizione.
L’idea chiave del KLD è di ridurre un numero elevato di variabili
interdipendenti in un numero di gran lunga inferiore di variabili tra loro
indipendenti al tempo stesso trattenendo il più possibile la variazione delle
variabili originali. Viene effettuata una trasformazione ortogonale della matrice
di covarianza presa in considerazione nella base degli autovettori corrispondenti
agli autovalori più grandi. La trasformazione permette di scorrelare le
componenti del segnale e di massimizzare la varianza.
La proprietà più rilevante del KLD è l’ottimalità, nel senso che esso minimizza
l’errore quadratico medio tra il segnale originale e la sua rappresentazione
lineare ridotta.
Di seguito viene presentata una breve formulazione matematica del metodo
KLD, discutendone le caratteristiche positive e negative.
2.3.3. Formulazione matematica del KLD
La formulazione proposta riprende il lavoro di sintesi sui metodi POD di Y. C.
Lyang [8] e si riferisce alla versione discreta del KLD [5].
Sia un vettore random e un set di vettori di base ortonormali in
, allora esiste un tale che
(2.122)
Sia

49
(2.123)
dove sono costanti. Può essere facilmente verificato che
a seguito dell’azzeramento dell’offset dei campioni,
cioè dopo aver operato su un vettore random tale per cui .
Sia dove e sono vettori random,
perciò anche è un vettore random. Per poter esaminare la qualità
dell’espressione di si sceglie di usare l’errore quadratico medio, ovvero
(2.124)
Per permettere a di essere un minimo, viene calcolata la derivata di
rispetto a , che porta a
(2.125)
che eguagliata a zero conduce a
(2.126)
Si può vedere che dopo l’azzeramento dell’offset dei campioni; quindi si
ha che risulta essere la forma richiesta del POD. Per
mantenere la generalità della derivazione, si sostituisce l’equazione (2.126)
nell’equazione (2.124), che dà
50
(2.127)
dove è la matrice di covarianza di e
(2.128)
Quindi il problema KLD viene trasformato in un problema di minimizzazione
vincolata
(2.129)
(2.130)
Introducendo i moltiplicatori di Lagrange si
ottiene
(2.131)
Differenziando rispetto a entrambi i membri dell’equazione precedente si può
scrivere

51
(2.132)
dove . Riscrivendo
l’equazione in forma matriciale si ha
(2.133)
dove . Ponendo il secondo membro uguale a zero si
ottiene
(2.134)
È facilmente verificabile che tutti i vettori di base ortonormali che soddisfano il
sistema composto dalle equazioni (2.129) e (2.130) devono soddisfare anche
l’equazione (2.134), dove non ci sono vincoli particolari per e .
A questo punto si dimostra che tutti gli che soddisfano l’equazione
(2.134) possono essere formati dagli autovettori di e che è la matrice
diagonale che contiene i corrispondenti autovalori di .
Moltiplicando l’equazione (2.134) per si ha
(2.135)
Da notare che , così nell’equazione (2.135) è la matrice di
covarianza del vettore formato dagli ultimi elementi del vettore random
a seguito della trasformazione . Perciò è una matrice semidefinita
positiva di dimensioni .

52
Sia la matrice diagonale formata dagli autovalori di e la
matrice quadrata formata dai corrispondenti autovettori. Effettuando la
trasformazione si ha
(2.136)
Sostituendo l’equazione (2.135) all’interno dell’equazione (2.136) si arriva a
(2.137)
Si può notare che gli elementi diagonali di sono gli autovalori di
e gli autovettori corrispondenti agli autovalori formano .
Chiamando la matrice degli autovettori , si può scrivere
(2.138)
Quindi l’errore quadratico medio risulta
(2.139)
dove sono gli autovalori corrispondenti alle colonne di
. Una volta che è mappata nel sottospazio -dimensionale spaziato
dagli autovettori di , l’applicazione di un’ulteriore trasformazione
ortonormale non andrebbe a cambiare l’errore quadratico medio. Di
conseguenza, e dell’equazione (2.135) possono essere scelti

53
semplicemente prendendo le matrici formate dagli autovalori e autovettori di
rispettivamente.
2.3.4. Interpretazione fisica del POD
Nell’articolo di B. F. Feeny e R. Kappagantu in riferimento [9] viene analizzato
come i modi estratti dal POD (Proper Orthogonal Modes o POM) siano legati ai
modi propri di vibrare e come si possa evidenziare una loro interpretazione
fisica. Di seguito è riportato un breve riassunto delle loro considerazioni.
Il POD è un metodo emergente che si sta rivelando particolarmente utile come
strumento per l’analisi sperimentale nella dinamica delle vibrazioni. Esso è
principalmente una formulazione statistica, sebbene faciliti la proiezione modale
di equazioni differenziali alle derivate parziali in modelli deterministici di
ordine ridotto.
L’applicazione del POD alle strutture tipicamente richiede di avere misurazioni
degli spostamenti del sistema dinamico in posizioni. Questi spostamenti
vengono misurati volte per cui si ha con
. Nell’operare il POD, queste storie di spostamento vengono usate
per formare una matrice d’insieme
(2.140)
Ogni riga di rappresenta un punto nello spazio delle coordinate in un
particolare istante di tempo. Viene così formata la matrice di correlazione (di
dimensione
(2.141)

54
Visto che è reale e simmetrica, i suoi autovalori formano una base ortogonale.
Gli autovettori di sono i modi ortogonali propri (POM) e gli autovalori i valori
ortogonali propri (POV).
Le equazioni di moto per un sistema vibratorio lineare non forzato e non
smorzato a più gradi di libertà è scritto come
(2.142)
I vettori modali , quando vengono normalizzati rispetto alla matrice di massa,
soddisfano la condizione di ortogonalità . Può essere fatta quindi
una trasformazione di coordinate . Il sistema può essere espresso
come
(2.143)
I vantaggi di questa rappresentazione sono che le matrici sono ancora
simmetriche e la matrice di massa risultante è l’identità. I vettori modali
normalizzati di un sistema così fatto soddisfano la proprietà di ortogonalità
.
Supponendo che la vibrazione consista in un certo numero di modi propri, si può
esprimere il moto come
(2.144)
dove le componenti di sono gli spostamenti di particolari coordinate,
sono i vettori modali e le costanti e dipendono dalle condizioni iniziali.
Si può controllare se un vettore modale è in realtà un POM post-moltiplicando la
matrice per il vettore modale:

55
(2.145)
dove .
La relazione di ortogonalità riduce il prodotto matriciale a
(2.146)
Fino a quando le frequenze dei modi sono distinte, ogni termine
scompare al tendere di ad infinito , eccetto per il termine che è
proporzionale a . Perciò, un autovettore di , e quindi un POM, converge
verso un vettore modale.
Nel proseguo dell’articolo, viene proposto l’esempio di un sistema lineare non
smorzato a 3 gradi di libertà, schematizzato tramite 3 molle e 3 masse, come
visibile in Figura 2.3.1.
Figura 2.3.1 Sistema a 3 masse e 3 molle
Tralasciando di riportare i risultati numerici, è utile sottolineare che il test
dimostra che i POM convergono verso gli autovettori del sistema e l’errore
commesso diminuisce all’aumentare del numero di campioni estratti dalla storia

56
temporale di vibrazione del sistema e pure all’aumentare della lunghezza del
tempo di registrazione del moto.
A questo punto, si può passare ad osservare un’interessante interpretazione
geometrica dei POM. Se si considera , allora gli autovettori
normalizzati di soddisfano
(2.147)
L’equazione soprastante può essere pre-moltiplicata per al fine di ottenere
. È utile prendere ora in considerazione . Visto che consiste
nelle colonne delle informazioni campionate provenienti da ciascuna coordinata,
le righe di rappresentano i punti (quelli dove sono posizionati i sensori) ad
ogni istante di tempo. Rinominando queste coordinate con , in modo tale che
le righe di siano date da , si ha allora
(2.148)
Ogni elemento del vettore consiste nella proiezione delle coordinate sul
vettore unità , dando la sua distanza rispetto all’origine lungo la direzione di .
Quindi la quantità
eguaglia la distanza quadratica
media dei dati delle coordinate proiettata lungo gli assi di . Gli autovettori, o
modi ortogonali propri, quindi ottimizzano la distanza quadratica media dei dati
lungo una base ortogonale. Nei sistemi meccanici, le distanze quadratiche sono
associate all’energia. Questa è un’interpretazione consistente con la proprietà
nota che i POM indicano l’ottima distribuzione dell’energia all’interno dei dati.
Si può anche notare che i POM coincidono con gli assi principali dell’ellissoide
d’inerzia formato da questa distribuzione di massa (cioè dei dati).
Si dimostra che gli assi principali d’inerzia della distribuzione, ponendo a
ciascun dato massa unitaria, sono autovettori della matrice e di conseguenza
coincidono con i POM. In aggiunta, i POV sono legati ai momenti principali
d’inerzia tramite per , dove e è il

57
valore del momento principale d’inerzia . Quindi questo vuol dire che l’asse
corrispondente al più grande valore ortogonale proprio, che è associato alla
massima distanza proiettata media dei dati, corrisponde all’asse lungo il quale si
registra il minore momento d’inerzia.
2.3.5. Derivazione in frequenza del KLD
È possibile derivare il metodo KLD nel dominio delle frequenze, ugualmente
applicabile a database sia sperimentali che generati numericamente [6]. Nel
primo caso, si assume che siano disponibili un certo numero di risposte in
frequenza a partire da un esperimento.
L’obiettivo è trovare una funzione reale per cui il seguente indice di
merito energetico è massimo:
(2.149)
con il vincolo
(2.150)
dove rappresenta la risposta del sistema lineare preso in considerazione.
Qui rappresenta una funzione agli autovalori empirica che è ottimale nel
senso che partecipa nella risposta con l’ampiezza più grande ma mantenendo
l’energia media del sistema al suo valore quadratico medio. La media in tempo
è approssimata attorno ad un periodo finito .
L’energia quadratica media, dati campioni ad istanti di tempo
con intervalli di tempo , è
esprimibile come
58
(2.151)
dove .
È quindi possibile presentare una formulazione diretta del metodo KLD.
L’energia quadratica media espressa dall’equazione (2.151) può essere
convertita in un integrale nel dominio delle frequenze grazie al teorema di
Parceval:
(2.152)
L’ampiezza della risposta in frequenza è data come
(2.153)
dove e l’asterisco rappresenta il complesso coniugato.
Assumendo che i dati campionati siano disponibili per frequenze
con intervalli in frequenza ,
l’equazione (2.149) può essere approssimata come
(2.154)
dove . Tenendo conto del vincolo imposto
dall’equazione (2.150), il funzionale da massimizzare è
(2.155)

59
Prendendo la derivata parziale dell’equazione (2.155) e ponendola a zero, si
arriva a
(2.156)
Dove
(2.157)
e . Come nel caso nel dominio del tempo, il nucleo della
funzione può essere interpretato come la correlazione delle risposte dei 2
sistemi, e . Si può notare che è reale e simmetrica e,
senza perdita di generalità, gli autovettori sono reali e ortonormali, ovvero
.
La formulazione diretta del KLD è vantaggiosa per sistemi con una risoluzione
spaziale moderata. Tuttavia, se il sistema ha una risoluzione considerevolmente
elevata, è preferibile il metodo snapshot. Può essere ottenuta una significativa
riduzione di dimensione del sistema assumendo come una combinazione
lineare di snapshot istantanei. Nel dominio delle frequenze, questo concetto può
essere espresso come
(2.158)
dove è una sequenza di numeri complessi pesati in base al passo in frequenza.
Sostituendo l’equazione (2.158) all’interno dell’equazione (2.156) si ha

60
(2.159)
O, in forma matriciale
(2.160)
Dove
(2.161)
(2.162)
(2.163)
Quindi, l’equazione integrale (2.156) è ridotta ad una equazione agli autovalori
di ordine . Tutti gli autovalori sono reali e gli autovettori formano coppie
complesse coniugate. Di conseguenza, tutti i modi del sistema ottenuti
dall’equazione (2.158) sono reali e ortonormali.
Una risposta in frequenza generica può essere approssimata tramite una
combinazione lineare degli autovettori come
(2.164)

61
dove, come conseguenza dell’ortonormalità
(2.165)
Si può notare anche che
, ovvero che l’autovalore di un modo KL è
anche la misura di quanto il modo partecipa nella generazione della risposta del
sistema preso in considerazione.
Eccettuando il fattore di scala , la procedura KL nel dominio delle
frequenze nell’equazione (2.158) come nella (2.160) assomiglia in modo deciso
al problema agli autovalori nel dominio del tempo
(2.166)
In effetti, nell’equazione (2.164) può essere interpretata come la
trasformata di Fourier dei coefficienti temporali che soddisfano
(2.167)
Di conseguenza, si otterrebbe lo stesso set di modi con entrambe le versioni
proposte del KLD (quella diretta e quella a snapshot), a patto che e
costituiscano esatte controparti della trasformata di Fourier.
2.3.6. Applicazione del KLD ad una struttura a traliccio 2D
Il metodo KLD si presta molto facilmente ad applicazioni dirette su strutture di
tipo traliccio, poiché la loro dinamica presenta delle interessanti sfide tecniche

62
[10]. Infatti, queste strutture generalmente possiedono alte densità modali, con
clusters di modi tra loro molto vicini anche a relativamente basse frequenze. Il
KLD permette di estrarre strutture spaziali coerenti, i POM, da un set di risposte
in tempo di differenti punti della struttura. Inoltre il metodo KL permette di
stimare l’energia di ciascun POM identificato (cioè la misura dell’importanza di
ciascun POM), una capacità che permette una stima quantitativa
dell’accuratezza dell’identificazione del comportamento del sistema.
Nel recente passato, sono state fatte delle prove numeriche [10] e sperimentali
[11] su strutture di tipo traliccio, delle quali si ritiene utile fornire un breve
riassunto, vista la stretta affinità con l’argomento principale della tesi.
Nel primo articolo, scritto da X. Ma e A. F. Vakakis, si prende in considerazione
una struttura bidimensionale a 18 baie (Figura 2.3.2), alla quale vengono
applicate le seguenti condizioni al contorno:
Struttura a traliccio libera nello spazio (ovvero non appoggiata);
Il vettore
delle forze esterne generalizzate (nel dominio delle
frequenze) sono agenti sul lato sinistro del traliccio;
Non esistono forze esterne generalizzate sul lato destro del traliccio,
ovvero
;

63
Figura 2.3.2 Traliccio a 18 baie
la relazione matriciale che si può scrivere tra le forze generalizzate e gli
spostamenti ai giunti è, per ogni set -esimo
(2.168)
dove
è il vettore degli spostamenti generalizzati al bordo sinistro
della baia ed è definito come
(2.169)
64
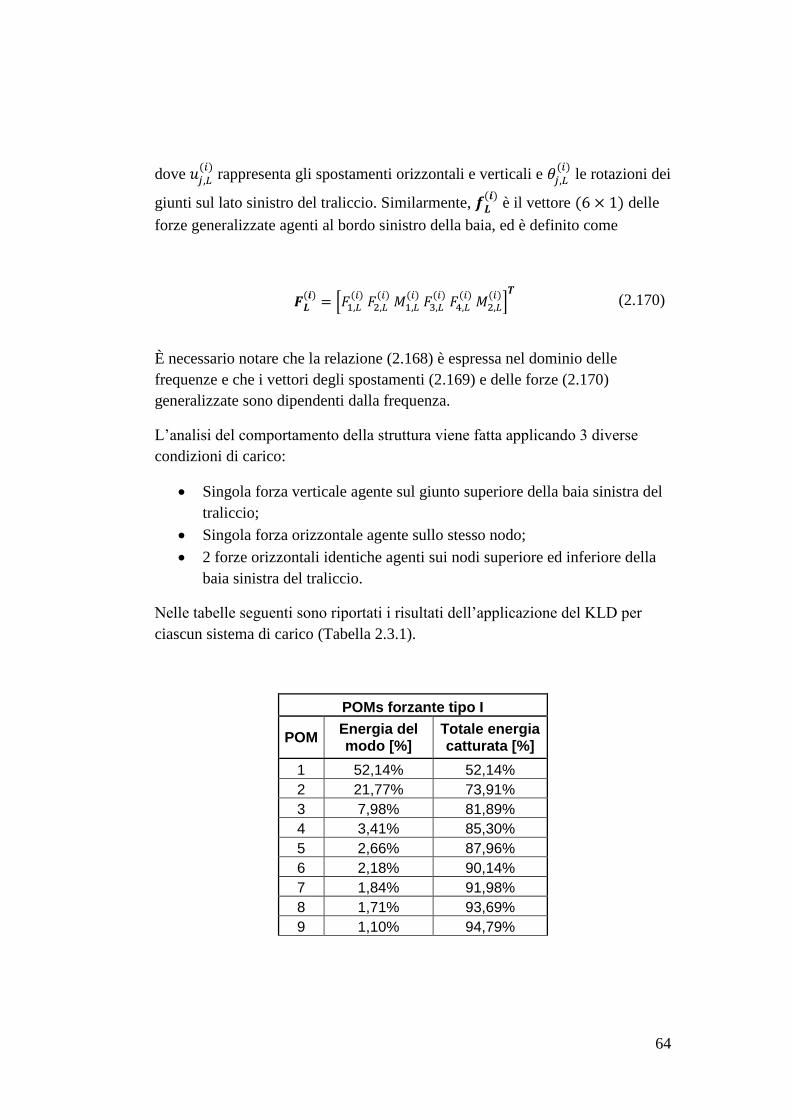
dove
rappresenta gli spostamenti orizzontali e verticali e
le rotazioni dei
giunti sul lato sinistro del traliccio. Similarmente,
è il vettore delle
forze generalizzate agenti al bordo sinistro della baia, ed è definito come
(2.170)
È necessario notare che la relazione (2.168) è espressa nel dominio delle
frequenze e che i vettori degli spostamenti (2.169) e delle forze (2.170)
generalizzate sono dipendenti dalla frequenza.
L’analisi del comportamento della struttura viene fatta applicando 3 diverse
condizioni di carico:
Singola forza verticale agente sul giunto superiore della baia sinistra del
traliccio;
Singola forza orizzontale agente sullo stesso nodo;
2 forze orizzontali identiche agenti sui nodi superiore ed inferiore della
baia sinistra del traliccio.
Nelle tabelle seguenti sono riportati i risultati dell’applicazione del KLD per
ciascun sistema di carico (Tabella 2.3.1).
POMs forzante tipo I
POM Energia del modo [%]
Totale energia catturata [%]
1 52,14% 52,14%
2 21,77% 73,91%
3 7,98% 81,89%
4 3,41% 85,30%
5 2,66% 87,96%
6 2,18% 90,14%
7 1,84% 91,98%
8 1,71% 93,69%
9 1,10% 94,79%

65
10 1,08% 95,87%
POMs forzante tipo II
POM Energia del modo [%]
Totale energia catturata [%]
1 90,77% 90,77%
2 2,11% 92,88%
3 1,79% 94,67%
4 0,91% 95,58%
5 0,87% 96,45%
6 0,87% 97,32%
7 0,69% 98,01%
8 0,55% 98,56%
9 0,39% 98,95%
10 0,28% 99,23%
POMs forzante tipo III
POM Energia del modo [%]
Totale energia catturata [%]
1 96,53% 96,53%
2 1,46% 97,99%
3 1,21% 99,20%
4 0,40% 99,60%
5 0,27% 99,87%
6 0,06% 99,93% Tabella 2.3.1 Distribuzione dell'energia per i primi modi del traliccio a 18 baie
Si può notare che la prima condizione di carico porta la struttura ad avere una
predominanza di modi flessionali, e che i primi 10 modi sono capaci di catturare
più del 95% dell’energia totale della risposta. Quando viene considerato un
carico di tipo orizzontale invece, vi è un significativo cambiamento qualitativo
nei risultati, poiché la struttura vibra in maniera predominante in direzione
longitudinale e quindi, per la seconda e la terza condizione di carico, il primo
POM cattura una parte essenziale dell’energia e domina su tutti gli altri modi.
Questo è in contrasto con quello che era stato osservato con la forzante verticale,
dove veniva osservata una partizione dell’energia su più modi. Nelle successive
Figura 2.3.3, Figura 2.3.4 e Figura 2.3.5 sono mostrati i primi 3 modi per

66
ciascuna condizione di carico (4 per la terza condizione). Questi modi non
hanno somiglianza con i classici modi propri di vibrare che si otterrebbero da
un’analisi agli autovalori diretta delle equazioni di moto.
Figura 2.3.3 POM dominante per la forzante di tipo I

67
Figura 2.3.4 POM dominante per la forzante di tipo II
Figura 2.3.5 POM dominante per la forzante di tipo III
68
Va ricordato però che l’identificazione di sistema di strutture flessibili similari al
traliccio utilizzato per l’analisi, è un compito problematico dovuto al fatto che
sono implicate alte densità modali che provocano problemi significativi nel caso
di utilizzo delle classiche tecniche di analisi modale nel dominio del tempo (o
delle frequenze). Proprio perché non ha a che fare con i modi di vibrare fisici, il
KLD non ha questo tipo di limitazione e può essere usato per l’identificazione di
sistema di strutture con leggero smorzamento e alta flessibilità, che tipicamente
possiedono alte densità modali.
In un articolo successivo [11], sempre redatto da X. Ma e A. F. Vakakis,
vengono proposti i risultati di un confronto tra l’analisi numerica effettuata
usando i POM e l’analisi sperimentale, applicate ad una struttura a traliccio a 3
baie.
Gli obiettivi dello studio sono:
Estrarre i modi KL sperimentali della struttura sottoposta ad una
eccitazione quasi-impulsiva;
Confrontare le forme dei modi KL sperimentali con quelli calcolati
numericamente;
Provare la robustezza dei modi KL e mostrare che risulta fattibile
implementare un modello di ordine ridotto che rappresenti fedelmente la
dinamica di sistemi flessibili di grande scala.
Le misurazioni sulla struttura vera vengono fatte su tutti gli 8 giunti delle 3 baie
attraverso degli accelerometri triassiali. Dei dati sperimentali, si è tenuto conto
solo della componente di accelerazione nel piano x-y, trascurando quelle fuori
dal piano. Le eccitazioni, di carattere impulsivo, vengono fornite rispettivamente
in direzione x ed y. Nelle Figura 2.3.6 e Figura 2.3.7 sono presentati i modi
calcolati in modo puramente numerico e confrontati con quelli ottenuti
attraverso le misurazioni sperimentali.

69
Figura 2.3.6 Modi KL principali teorici e sperimentali in direzione x

70
Figura 2.3.7 Modi KL principali teorici e sperimentali in direzione y

71
Si può notare che c’è una concordanza soddisfacente tra le forme modali
dominanti date dall’approccio teorico e sperimentale, nonostante ci sia una netta
differenza tra l’energia catturata dal modo sperimentale (circa 35% con
eccitazione in direzione x) rispetto a quello numerico (90%). Inoltre, quando si
considerano i modi di ordine superiore, si vede che vi è molta più energia
diffusa tra i modi sperimentali, tale per cui non vi è un accordo soddisfacente tra
i 2 approcci. Si può concludere che, sebbene il modello teorico sia in accordo
con i risultati sperimentali a basse frequenze, esso si discosta andando ad alte
frequenze. Va notato però che le posizioni delle risonanze evidenziano un
sostanziale accordo tra la stima fatta dall’approccio teorico e quello
sperimentale.
Inoltre, il fatto che il modo dominante ricavato dall’approccio teorico sia in
accordo nella sua forma (ma non nella percentuale di energia catturata) con
quello sperimentale, è un segnale incoraggiante. Questa è una ulteriore prova
che i modi KL si prestano bene per la riduzione dell’ordine di sistemi flessibili
con alte densità modali laddove altre tecniche di riduzione sono difficili da
applicare. In aggiunta a tutto ciò, visto che con soltanto pochi modi KL, per la
struttura presa in considerazione nell’articolo ne sono sufficienti soltanto 6 (su
un sistema di 24 equazioni differenziali alle derivate parziali), si riesce a
catturare le caratteristiche essenziali della risposta, con il KLD è possibile
ottenere una drastica riduzione dell’ordine del sistema, difficile da raggiungere
con i modi di vibrare classici.
2.4. IL METODO DI C. SOIZE E POD A CONTATTO
Questo paragrafo ha lo scopo di evidenziare le somiglianze ed a volte addirittura
la sovrapposizione, tra le caratteristiche dell’Energy Operator proposto da C.
Soize e quelle della matrice di autocovarianza del metodo Karhunen-Loeve.
Innanzitutto, si può notare che la matrice di autocovarianza sia, per
definizione, reale e simmetrica, come l’Energy Operator [3].
Inoltre, essendo l’Energy Operator definito come

72
(2.171)
si può notare che la matrice delle funzioni di risposta in frequenza e il
suo complesso coniugato effettuano tra loro una convoluzione delle
proprie informazioni, similmente a quanto accade con la matrice di
autocovarianza (ripresa da [6] nella sua formulazione in frequenza)
(2.172)
Tra le 2 matrici vi sono 2 differenze principali:
L’Energy Operator è un operatore che rappresenta l’energia e quindi ne
porta anche le dimensioni fisiche; questo fatto è evidenziato dalla
presenza della matrice di massa, che contribuisce ad identificare la
matrice risultante come il doppio dell’energia cinetica totale della
struttura [4]. In questo contesto viene giustificata anche la presenza del
termine , che dà la dimensione di velocità alle matrici delle funzioni
di risposta in frequenza, e del coefficiente
, che risulta essere
semplicemente un termine di scalatura;
La matrice di autocovarianza è costruita attraverso il prodotto di un set di
valori discreti, a differenza dell’Energy Operator che a valori puntuali
sostituisce delle funzioni continue (le funzioni di risposta in frequenza
FrF).
In realtà, anche alla matrice di autocovarianza può essere data una dimensione
fisica, semplicemente aggiungendo una matrice peso ; per la maggior parte
delle applicazioni essa è pari all’identità, ma può benissimo essere la matrice di
massa , a sottolineare la somiglianza con l’Energy Operator [12]:
(2.173)

73
Nonostante queste differenze, è possibile ottenere da entrambe le matrici un set
di autovalori reali e positivi e di conseguenza degli autovettori ortonormali,
capaci cioè di formare una base completa nello spazio di appartenenza [5] e [3].
Un’altra caratteristica comune e molto conveniente è che il metodo KL
permette, ricavati gli autovalori, di stabilire in modo immediato come i modi
rappresentati dagli autovettori contribuiscono quantitativamente all’energia della
risposta [7], semplicemente, visto che l’energia totale è esprimibile come
(2.174)
quindi l’energia percentuale di ciascun modo si può scrivere come
(2.175)
Questa caratteristica è propria anche della matrice .
Per concludere, è utile aggiungere che nel recente passato è stato proposto da R.
Ghanem e P. Spanos [13] un metodo innovativo per combinare il metodo
proposto da C. Soize e l’approccio SFEM (Stochastic Finite Element Method)
[14], per la risoluzione di problemi di dinamica strutturale di tipo stocastico nel
dominio delle medie frequenze. Esso procede avvalendosi dell’Energy Operator
adattato ad una specifica banda in frequenza per costruire un modello ridotto
utilizzando uno sviluppo alla Ritz-Galerkin. Quando è stato costruito un modello
ridotto efficiente, l’incertezza sui parametri del sistema viene trattata tramite
l’approccio SFEM, che si basa sull’integrazione del KLD e della Polynomial
Chaos Expansion.

74
3. IMPLEMENTAZIONE NUMERICA
3.1. Introduzione
Nel corso di questo capitolo viene presentato il programma realizzato da E.
Savin, basato sui concetti teorici espressi negli articoli di C. Soize già riassunti
nel capitolo precedente, utilizzando il solutore MSC.Nastran, versione 2001. Il
programma è stato aggiornato nell'ambito del lavoro di tesi alla versione 2011 di
MSC.Nastran, correggendo e modificando le parti che, per questioni di
evoluzione del software, non funzionavano più o non consentivano una buona
flessibilità nell'ottenere i vari risultati. Esso è scritto in linguaggio DMAP
(Direct Matrix Abstraction Program), il codice interno di MSC.Nastran (si
consiglia di consultare l’Appendice per una breve descrizione del suo
funzionamento).
Nel paragrafo 3.2 vengono presentati il programma principale utilizzato, i suoi
sottoprogrammi, le problematiche riscontrate durante l'aggiornamento e come
sono state risolte al fine di consentire il funzionamento corretto dello stesso.
Inoltre è presente una breve guida sui parametri definiti all’interno del
programma e modificabili dall’utente, fornendo anche in alcuni casi dei valori
empirici. Successivamente, nel paragrafo 3.3, viene mostrato il funzionamento
del programma applicato ad un modello di piastra omogenea, al fine di validarlo
prima di passare a strutture più complesse.
3.2. Breve descrizione del programma
3.2.1. Elenco dei file utilizzati
Il programma originale è composto da vari file che interagiscono tra loro
scambiandosi input e output. Essi sono:

75
plate_108.dat
È un file di testo che contiene tutte le istruzioni di input necessarie per il
funzionamento di MSC.Nastran, quali le informazioni sulla geometria, i
materiali e le proprietà usate, i vincoli, i carichi applicati, il tipo di
soluzione da cercare ecc…; esso ha un duplice utilizzo, ovvero serve sia
per estrarre la funzione di risposte in frequenza (FrF) data dalla
soluzione diretta (SOL 108 di MSC.Nastran), sia per indicare al
software dove andare ad alterare il codice sorgente per inserire le linee
di script relative al nuovo metodo di soluzione, ottenendo così la FrF
calcolata con il modello ridotto di C. Soize;
deck_mfn_red.dmp
è il programma principale, quello in cui è implementato il metodo di C.
Soize, il quale va a modificare il funzionamento standard del solutore
SEDFREQ (SOL 108) di MSC.Nastran; è conveniente sottolineare che,
per il calcolo degli autovalori associati alla matrice relativa all’Energy
Operator, è stato scelto di utilizzare il solutore Lanczos;
mmfn_red.dmp
è uno dei sottoprogrammi ausiliari di deck_mfn_red.dmp; il suo compito
principale è quello di risolvere il sistema di equazioni del modello LF
associato a quello MF nel dominio del tempo (equazioni 2.115 e 2.116);
inimf.dmp
esso serve principalmente per calcolare la matrice di smorzamento in
base alle richieste dell'utente, definite nel file plate_108;
forces.dmp
questo sottoprogramma viene usato per calcolare le forze applicate su
ciascun nodo e ordinarle per il loro successivo utilizzo;
deck_GAA.dmp
il suo scopo principale è di estrarre una matrice di massa relativa al
modello tale per cui la densità del materiale sia pari a 1.
Il primo problema riscontrato cominciando ad utilizzare il programma è che,
essendo stato scritto una versione di MSC.Nastran diversa rispetto a quella
attuale, i riferimenti alle linee di codice dei risolutori appartenenti al software
risultavano errati; questo portava ad un non corretto inserimento delle nuove
righe di codice necessarie per il funzionamento del programma
deck_mfn_red.dmp.
76
Oltre questo, il sottoprogramma deck_GAA.dmp, che va ad eseguire delle
operazioni complicate all'interno del codice sorgente ed era stato commissionato
ad un programmatore di MSC.Nastran, non solo non presentava più i riferimenti
corretti, ma a valle del loro aggiornamento continuava a provocare un Fatal
Error, dovuto probabilmente ai comandi auxmodel ed auxcase, che vengono
normalmente utilizzati per il tipo di soluzione SOL 600 ed erano adattati alla
SOL 108, ovvero la risposta diretta in frequenza.
In generale quindi, per ottenere i risultati ricercati, MSC.Nastran deve essere
lanciato 2 volte:
plate_108.dat, per ottenere la funzione di risposta in frequenza tramite
soluzione diretta;
plate_108.dat, per fornire in output la funzione di risposta in frequenza
relativa al metodo di riduzione di C. Soize.
A valle dei calcoli effettuati usando MSC.Nastran, per la manipolazione dei dati
e dei files di output è stato creato un file Matlab, chiamato plate.m, il quale
processa i dati in ingresso ed effettua tutti i confronti e le visualizzazioni
necessarie. Esso si avvale del sottoprogramma readop4.m, che serve solamente
per la lettura degli file in uscita da MSC.Nastran (i quali sono in formato .out).
3.2.2. Funzionamento del programma
Il programma, sviluppato all’interno del dipartimento DADS dell’Onera [15], si
basa sul metodo proposto da C. Soize e in sostanza si basa su:
La rappresentazione della fascia in frequenza da studiare come l’unione
di bande di frequenza, dette strette; esse, nella maggior parte delle
verifiche esposte in questo lavoro, sono prese dividendo la fascia di
frequenza desiderata in 5 parti uguali (sebbene possano essere
modificate a piacimento dall’utente);
La trasformazione del sistema in frequenza da risolvere in un sistema
nel dominio del tempo, sfruttando la tecnica indiretta nel dominio del
tempo proposta da C. Soize [3], e presentata nel paragrafo 2.2.5
equazioni (2.115) e (2.116);

77
La risoluzione del sistema nel dominio del tempo;
Il calcolo delle funzioni di risposta in frequenza FrF a partire da quelle
temporali.
Il sistema nel dominio delle frequenze da risolvere è il classico sistema
(3.1)
dove è la matrice di massa, è la matrice di smorzamento, quella di
rigidezza e il vettore delle forze esterne.
Il programma calcola la funzione di risposta in frequenza FrF discretizzando le
bande strette secondo alcuni parametri, modificabili dall’utente, che
caratterizzano ciascuna banda:
La frequenza centrale della banda stretta , a cui corrisponde la
pulsazione centrale ;
La larghezza della banda , a cui corrisponde la pulsazione
;
Un parametro che quantifica l’effetto di bordo di ciascuna banda stretta
, necessario perché la trasformata di Fourier introduce degli errori in
vicinanza dei bordi di ciascuna banda; il suo omologo in pulsazione è
;
3 parametri che governano il campionamento nel tempo, , e ,
che verranno presentati nel seguito del paragrafo;
Le matrici di massa e rigidezza vengono calcolate automaticamente da
MSC.Nastran, mentre viene lasciata la possibilità all’utente di selezionare una
delle seguenti tipologie per la costruzione della matrice di smorzamento:
Smorzamento strutturale (STRU), che corrisponde alla matrice di
smorzamento generata da MSC.Nastran a partire dal parametro GE
definibile tramite il comando MAT1 (materiali lineari isotropi):
(3.2)

78
con il valore di smorzamento, costante per ciascuna banda, definiti in
GE;
Smorzamento proporzionale alla rigidezza (STRU2),
(3.3)
Smorzamento in funzione della massa (RAYM),
(3.4)
Smorzamento in funzione della massa e della rigidezza (RAY2),
(3.5)
dove è la frequenza centrale della banda stretta e la larghezza
della banda, espresse entrambe in ;
Smorzamento costruito da MSC.Nastran (BAA),
(3.6)
dove è una matrice di smorzamento creata direttamente da
MSC.Nastran a partire dai materiali usati dagli elementi che
compongono la mesh.
Riassumendo, i dati supplementari che l’utilizzatore deve definire oltre a quelli
già citati sono la frequenza iniziale, il numero di bande strette da trattare, il tipo
di rappresentazione dello smorzamento e la scelta dei gradi di libertà (contenuti
nella matrice DOFO) di cui estrarre le risposte, ovvero le funzioni di risposta in
frequenza.
Tornando ai parametri in frequenza definiti in precedenza, è necessario
puntualizzare ed ampliare alcune cose.

79
La banda stretta che viene analizzata dal metodo di risoluzione MF in tempo non
è l’iniziale banda , ma include il parametro
che permette di ridurre gli effetti di bordo dovuti alla troncatura
dell’integrazione in tempo, quindi i risultati in frequenza vengono calcolati sulla
banda modificata .
Si può dare un valore indicativo, frutto di valutazioni empiriche, ai parametri
e , in modo da agevolare l’utente:
La larghezza della banda deve essere inferiore ad un valore
compreso tra e ;
Il valore del parametro degli effetti di bordo deve essere compreso tra il
e il di .
Riguardo il calcolo delle risposte in frequenza, è utile evidenziare che esse sono
ottenute a partire dalle risposte in tempo nel modo seguente (per approfondire
l’argomento si consiglia di consultare il riferimento [4]):
(3.7)
dove le risposte nel dominio del tempo sono calcolate attraverso lo schema
derivato utilizzando il metodo di Newmark, agli istanti , con che varia
da a , con e (ovvero
passi temporali), mentre quelle in frequenza sono dedotte dalle risposte
in tempo agli istanti con che varia da a e
(ovvero istanti estratti dagli istanti di
integrazione). Il campionamento in tempo è quindi definito interamente a partire
dai parametri , e .
Visto che le risposte nel dominio delle frequenze sono dedotte dalle risposte in
tempo per integrazione nel dominio temporale, per esperienza si è riscontrato
che gli errori legati alle differenti approssimazioni dovute al metodo sono
trascurabili quando:

80
L’istante iniziale è tale che sia il più piccolo possibile per
minimizzare il costo di calcolo, ma abbastanza grande per non troncare
l’energia di eccitazione e non introdurre un transitorio numerico che
perturbi troppo la soluzione cercata; la scelta di è quindi legata al
comportamento asintotico per della funzione di eccitazione;
L’istante finale è tale che sia il più piccolo possibile per
minimizzare il costo di calcolo, ma abbastanza grande da non troncare
l’energia della risposta. Esso è quindi legato direttamente alla dinamica
del sistema, che è pilotata dallo smorzamento; la condizione seguente
fornisce un valore minimo per il parametro :
(3.8)
dove il coefficiente è legato alla tolleranza di approssimazione e già un
valore di o superiore fornisce ottimi risultati;
Per ragioni algoritmiche, il parametro è legato ad un valore strettamente
superiore ad 1 dovuto alla definizione del metodo di integrazione di Newmark.
In aggiunta, nel caso in cui il valore di fosse debole ( ), esso deve essere
dispari al fine di rappresentare correttamente il livello massimo d’eccitazione
nel tempo.
3.3. Validazione su un modello di piastra
3.3.1. Descrizione del modello di piastra
Il programma, dopo essere stato aggiornato, è stato validato tramite l'utilizzo di
un modello di piastra. Il modello consiste in una piastra piana di forma quadrata
composta da 441 nodi e 400 elementi CQUAD4 (Figura 3.3.1).

81
Figura 3.3.1: Griglia modello PLATE
Gli elementi CQUAD4 sono elementi particolari contenuti all'interno della
libreria di MSC.Nastran che permettono di offrire rigidezza per sopportare i
carichi secondo tutti i gradi di libertà traslazionali e rotazionali tranne la
rotazione in direzione perpendicolare all'elemento [16].
Le proprietà essenziali del modello sono:
Modulo di Young ;
Modulo di elasticità tangenziale ;
Coefficiente di Poisson ;
Densità ;
Coefficiente di smorzamento strutturale ;
Dal punto di vista delle condizioni di vincolo, la struttura viene lasciata libera
nello spazio; questo rende possibile cogliere gli autovalori relativi ai modi rigidi
della struttura, anche quando si rappresenta la funzione di risposta in frequenza.

82
La forzante utilizzata consiste in un rumore bianco di ampiezza pari a 1 e di
spettro , applicata alla struttura in un unico punto (la scelta del nodo
su cui applicare l'eccitazione è stata fatta in modo casuale) in direzione verticale
(asse z) e verso positivo; vi sono 3 sottocasi di carico e in ciascuno di essi la
forzante viene applicata ad un modo diverso, mantenendo la stessa direzione
verso (Figura 3.3.2).
Figura 3.3.2: Griglia PLATE con sensori ed attuatori
Gli ipotetici sensori sono di natura monoassiale, quindi capaci solo di rilevare
gli spostamenti in direzione z, sono posizionati in punti scelti in maniera casuale
e modificabili dall'utente. Il file plate_108.dat include la matrice DOFO, la quale
contiene questi punti; questa precisazione è importante perché, quando il
programma va calcolare le funzioni di risposta in frequenza del modello, estrae
soltanto quelle relative ai noti indicati nella matrice DOFO.

83
3.3.2. Risultati della validazione
Di seguito sono presentati i risultati per il modello di piastra, che sono serviti per
evidenziare la flessibilità del programma e le capacità nell’approssimare la
funzione di risposta in frequenza ottenuta tramite la risposta diretta in frequenza
di MSC.Nastran (SOL 108).
I valori dei parametri presentati nel paragrafo 3.2.2 sono rispettivamente:
Punti di applicazione dell’eccitazione nei 3 sottocasi di carico sui nodi
;
Sensori posizionati nei nodi ;
Frequenze centrali ;
Ampiezza di banda ;
Fattore di correzione di bordo ;
Parametri d’integrazione , e ;
Coefficiente di smorzamento ;
Tipo di smorzamento (STRU)
Numero di modi del modello ridotto richiesti ;
In Figura 3.3.3 (per questioni di sintesi viene presentata il risultato per il terzo
sensore sottoposto alla terza condizione di carico) si può notare come il modello
ridotto riesca ad approssimare in modo eccellente la parte immaginaria della FrF
diretta, ma non altrettanto bene la parte reale. Sebbene nelle bande a frequenza
più elevata vi sia una buona concordanza tra la funzione di risposta in frequenza
calcolata dal metodo implementato e quella diretta, nella prima banda vi è una
discrepanza nel valore della funzione. Il fatto bizzarro è che sembra esserci
come uno “sfasamento” tra le 2 funzioni, evidenziato dal gradino che vi è al
passaggio dalla prima alla seconda banda in frequenza.

84
Figura 3.3.3: PLATE 9 modi
La spiegazione più plausibile è che, nell’aggiornamento tra la versione 2001 di
MSC.Nastran e quella 2011, sia cambiata qualche cosa nel codice sorgente del
programma tale da modificare il flusso di calcolo, altrimenti non ci si
spiegherebbe la perfetta concordanza tra le funzioni che rappresentano la parte
immaginaria della FrF.
Altro problema riscontrato è l’impossibilità di utilizzare più di 9 modi, pena
l’incorrere in un Fatal Error dato dal comando che implementa la ricerca degli
autovalori secondo il metodo di Lanczos; in generale si nota una scarsa
flessibilità nella scelta dei parametri d’integrazione. Per risolvere il problema del
numero di modi desiderati, si è scelto di ampliare l’ordine del sistema ridotto da
cui vengono calcolate le matrici necessarie per l’applicazione del metodo
indiretto MF in tempo e, in cascata, viene risolto il problema agli autovalori da
cui vengono estratti i modi desiderati.
85
Riprendendo il lavoro di C. Soize [3], si può notare come il sistema venga
ridotto di ordine secondo il parametro
(3.9)
che permette di considerare un sistema con un certo numero di gradi di libertà in
più rispetto a quelli desiderati ; questo è un particolare utile perché così
facendo il calcolo di un numero superiore di autovalori porta ad una migliore
convergenza di quelli ottenuti in prima battuta, cioè quelli che alla fine vengono
usati praticamente nel calcolo della risposta.
Nel caso in esame, giocando su questo valore, si è riusciti ad aumentare la
flessibilità nel numero di modi desiderati, a scapito però di un costo
computazionale superiore, dovuto principalmente al tempo di estrazione degli
autovalori da parte del solutore Lanczos.
Il risultato ottenuto con gli stessi parametri, ma prendendo e
, è esposto in Figura Figura 3.3.4:

86
Figura 3.3.4: PLATE 10 modi, m=2*N
Come si può notare, non solo non c’è un evidente miglioramento, ma addirittura
si ha un peggioramento della qualità del risultato.
A prova del fatto che non sia il modello FEM scelto a causare questo strano
comportamento, sono state fatte ulteriori 2 prove:
Prendere meno modi rispetto ai 9 iniziali consentiti dal programma,
lasciando intatto il valore di ;
Passare da un’analisi a 5 bande strette a quella ad una sola banda che
ricopra tutto il campo in frequenza preso in considerazione.
I risultati sono esposti nelle figure seguenti:

87
Figura 3.3.5: PLATE 7 vs 9 modi
Figura 3.3.6: PLATE 5 bande vs 1 banda
Si può notare che nel primo caso, a seguito di varie prove alla fine delle quali si
è optato per considerare modi desiderati, i risultati siano più
soddisfacenti rispetto al caso di , soprattutto nell’approssimare la prima
banda stretta; stessa cosa nella seconda prova, dove una sola banda presenta una
discreta concordanza con la FrF diretta, al pari del caso con 5 bande, ma ha un
migliore comportamento nella prima sottobanda.
Nonostante questi risultati inaspettati e a volte bizzarri, la capacità del metodo di
approssimare la FrF calcolata con la risposta diretta in frequenza risulta
abbastanza soddisfacente (a parte i casi appena descritti), quindi si è proceduto

88
ugualmente a testare il programma su una struttura più complessa di tipo
traliccio, tenendo presente questo comportamento e continuando in parallelo il
lavoro di debug ed aggiornamento del codice.

89
4. VALIDAZIONE SU MODELLO A TRALICCIO
4.1. Introduzione
Nel corso di questo capitolo vengono presentate le 2 strutture complesse sulle
quali sono state fatte tutte le analisi per mettere alla prova il programma che
implementa il metodo dell’Energy Operator di C. Soize.
Il paragrafo 4.2 ha come obiettivo quello di presentare il primo modello a
traliccio utilizzato per le analisi, la struttura TRUSS; dopo una breve descrizione
ed una verifica di funzionamento iniziale, si passa a testare il programma su di
essa, discutendo in modo critico i risultati e descrivendo le successive modifiche
fatte sulla lista di istruzioni per tentare di migliorare le prestazioni e di dotare il
programma di nuove funzionalità. Infine, viene presentata l’analisi dei modi
ottenuti dal modello ridotto da un punto di vista energetico, utile per effettuare
considerazioni di carattere generale.
Nel paragrafo 4.3 viene introdotta la struttura SPACE, estensione di TRUSS in
termini di livello di complessità. Per questo nuovo modello vengono fatte
sostanzialmente le stesse considerazioni da un punto di vista modale ed
energetico, evidenziando caratteristiche in comune e/o discordanti rispetto alle 2
strutture precedenti.
4.2. La struttura a traliccio TRUSS
4.2.1. Descrizione della struttura TRUSS

90
La struttura TRUSS è stata scelta come modello test rappresentativo di una
struttura a traliccio di tipo spaziale [17], ma al contempo non troppo complessa
per non comportare tempi di calcolo proibitivi.
La struttura è composta da un assemblaggio tridimensionale di travi, in modo da
formare un parallelepipedo rinforzato diagonalmente, come un classico modello
di traliccio (Figura 4.2.1).
Figura 4.2.1: griglia TRUSS
Le dimensioni globali della struttura sono , e ,
la sezione di ciascuna trave è a forma di “U”, con valori dei lati
, e (Figura 4.2.2).

91
Figura 4.2.2: Sezione delle travi del traliccio
Le caratteristiche del materiale sono:
Modulo di Young ;
Modulo di elasticità tangenziale ;
Densità ;
Coefficiente di smorzamento strutturale ;
Per quanto riguarda la discretizzazione ad elementi finiti, per rappresentare le
proprietà della trave è stato scelto di utilizzare elementi di tipo CBEAM nella
libreria di MSC.Nastran; il numero di elementi scelto per ogni trave è di 30 in
direzione x, 20 in direzione y e 16 in direzione z, mentre per quelle disposte
diagonalmente si hanno 30 elementi nel caso della trave sul piano xy, 20 per la
trave nel piano xz e infine 30 per la terza trave.
Dal punto di vista dell’implementazione su MSC.Nastran, si è scelto di separare
i dati riguardanti la geometria e le proprietà della struttura dal resto del file di
input per dare maggiore compattezza allo stesso. Quindi, i file utilizzati sono
rispettivamente:

92
1. truss.dat
ha funzioni analoghe al file per piastra plate_108.dat;
2. mail_treillis.bdf
contiene tutti i dati sulla geometria e sugli elementi utilizzati;
3. ptes-beam.dat
contiene le informazioni sulle proprietà della struttura e come sono
legate a ciascuna trave del traliccio;
4. ptes-beam2.dat
file identico ptes-beam.dat salvo che al suo interno è stata impostato un
valore unitario della densità del materiale al posto di quella vera.
Infatti, questo file viene utilizzato dal sottoprogramma DMAP
deck_gaa.dmp per l’elaborazione della matrice di massa con densità
unitaria;
La sequenza di funzionamento dei programmi è del tutto identica a quella
utilizzata per il modello di piastra.
4.2.2. Verifica di funzionamento iniziale
Lo schema di applicazione dei carichi ricalca nella sua sostanza quello utilizzato
sul modello di piastra, con 3 sottocasi di eccitazione in cui ogni volta veniva
applicato ad un singolo nodo un rumore bianco di ampiezza 1 e spettro in
frequenza in direzione verticale; nel caso di TRUSS però, la scelta
dei punti di eccitazione non è casuale, infatti si è scelto di sollecitare la struttura
in punti specifici, ovvero allo spigolo in alto a sinistra della faccia anteriore
(nodo 146), il nodo centrale della trave diagonale in basso alla struttura (nodo
116) e della diagonale interna al traliccio (nodo 228). I sensori sono stati
posizionati negli stessi nodi, in modo da avere una matrice delle funzioni di
risposta in frequenza simmetrica (Figura 4.2.3) e in altri punti particolari della
struttura, come alcuni spigoli o le mezzerie dei lati.

93
Figura 4.2.3: Sensori e Attuatori TRUSS
Per prima cosa, si è controllato quali fossero i primi modi propri della struttura,
per verificare che non ci fossero stranezze nel comportamento del modello. La
prova è stata fatta prendendo la struttura inizialmente libera nello spazio e
successivamente vincolandola allo spigolo in alto a sinistra della faccia
posteriore (nodo 194).
Il calcolo è stato fatto utilizzando la Sequenza di Soluzione SOL 103 di
MSC.Nastran, che valuta i modi propri della struttura. Per fare ciò, è stato creato
ad hoc il file modes_truss.dat che permette, nel calcolo delle frequenze proprie
della struttura, di scegliere anche il numero di modi da ricercare (comando
EIGRL di DMAP).
In Tabella 4.2.1è possibile dare uno sguardo ai primi modi propri della struttura;
come ci si può aspettare, i modi propri della struttura in condizione incastrata
sono inferiori rispetto a quelli della struttura libera nello spazio.

94
Modi del modello TRUSS
Configurazione libera Configurazione vincolata
# frequenza [Hz] # frequenza [Hz]
7 7,67 1 1,8
8 11,3 2 2,5
9 13,11 3 3,2
10 13,95 4 5,3
11 14,65 5 6,9
12 15,78 6 7,7
13 16,83 7 8,6
14 18,12 8 11,7
15 18,46 9 15,8
16 20,17 10 16,2 Tabella 4.2.1: Modi propri struttura TRUSS
È opportuno notare che nella colonna della tabella relativa alla condizione
vincolata non sono stati inseriti i 6 modi rigidi della struttura, tutti quanti pari a
zero (in realtà MSC.Nastran dà dei valori diversi da zero ma di 4-5 ordini di
grandezza inferiori a quelli del primo modo deformabile, quindi tranquillamente
approssimabili a zero).
Dopo aver verificato che i modi propri della struttura siano coerenti, si è passati
a calcolare la funzione di risposta in frequenza calcolata col metodo diretto da
MSC.Nastran (SOL 108). In figura vi è un esempio della risposta in frequenza di
uno dei sensori (Figura 4.2.4).

95
Figura 4.2.4: Esempio di FrF diretta per la struttura TRUSS
A prova della bontà della FrF si può considerare la figura seguente, ottenuta
calcolando la FrF nel caso di struttura non vincolata, dove è ben visibile la
singolarità della funzione per frequenza nulla, dato ovviamente dalla presenza
dei modi rigidi della struttura (Figura 4.2.5).
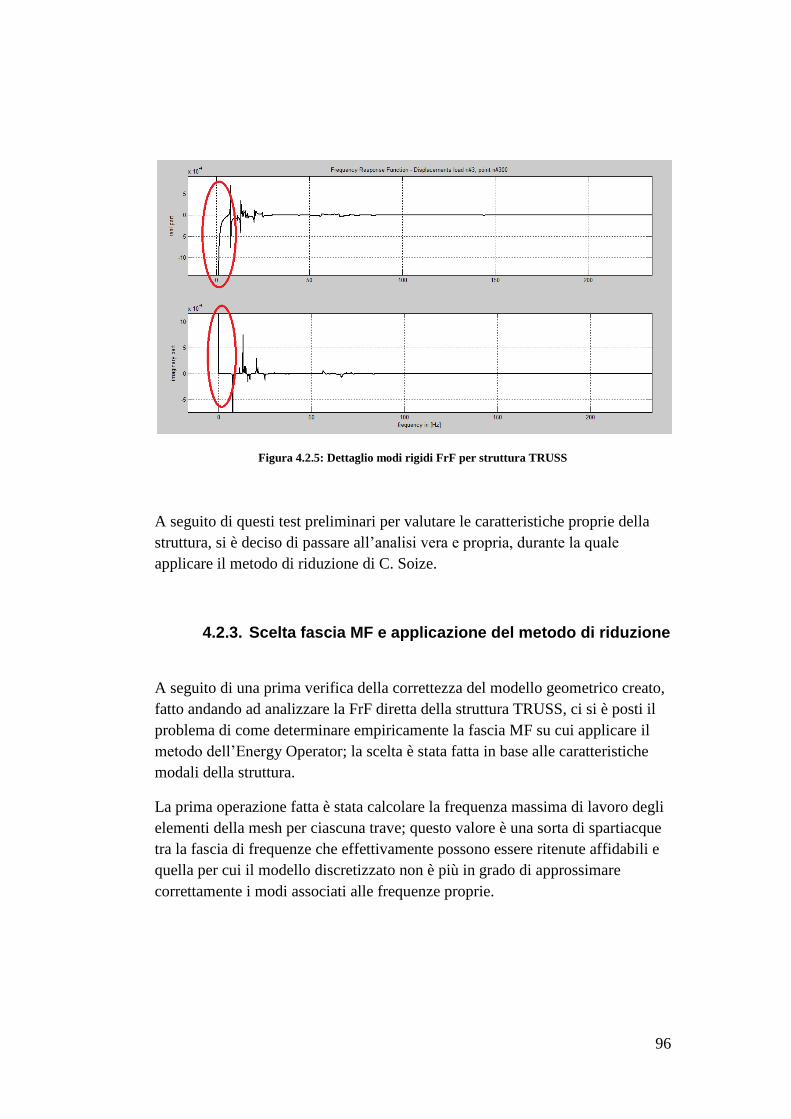
96
Figura 4.2.5: Dettaglio modi rigidi FrF per struttura TRUSS
A seguito di questi test preliminari per valutare le caratteristiche proprie della
struttura, si è deciso di passare all’analisi vera e propria, durante la quale
applicare il metodo di riduzione di C. Soize.
4.2.3. Scelta fascia MF e applicazione del metodo di riduzione
A seguito di una prima verifica della correttezza del modello geometrico creato,
fatto andando ad analizzare la FrF diretta della struttura TRUSS, ci si è posti il
problema di come determinare empiricamente la fascia MF su cui applicare il
metodo dell’Energy Operator; la scelta è stata fatta in base alle caratteristiche
modali della struttura.
La prima operazione fatta è stata calcolare la frequenza massima di lavoro degli
elementi della mesh per ciascuna trave; questo valore è una sorta di spartiacque
tra la fascia di frequenze che effettivamente possono essere ritenute affidabili e
quella per cui il modello discretizzato non è più in grado di approssimare
correttamente i modi associati alle frequenze proprie.

97
Il concetto di base del ragionamento è che la struttura, per come è discretizzata,
è capace di “vedere” solo le sinusoidi (che rappresentano i modi di vibrare di
ciascuna trave) fino ad una determinata frequenza; al di sopra di questa soglia, il
numero di elementi che compongono la trave non è più sufficiente per cogliere
la vera forma della sinusoide (effetto aliasing).
Per poter cogliere compiutamente una sinusoide è necessario garantire che il
numero di punti campionati per ciascun periodo del segnale sia maggiore o
uguale a 5. In Figura 4.2.6 vi è un semplice esempio qualitativo di
campionamento di una sinusoide.
Figura 4.2.6: Esempio di sinusoide con campionamento a 5 punti
Nel caso in analisi, è stato scelto quindi di prendere per ogni trave della struttura
la lunghezza ottenuta moltiplicando per 5 la dimensione del singolo elemento
(va notato che, per ogni trave, la lunghezza degli elementi è costante).
Per il calcolo della lunghezza d’onda delle vibrazioni relative a ciascuna trave,
si è optato per la formula che permette di trovare la velocità di trasmissione
delle onde vibratorie flessionali

98
(4.1)
dove è il momento d’inerzia della sezione considerata, la sua area, la
densità del materiale e la frequenza propria.
Elaborando la relazione e tenendo conto che
(4.2)
si arriva a poter scrivere la seguente relazione diretta tra lunghezza d’onda
minima che la trave può approssimare correttamente (5 volte la lunghezza del
singolo elemento) e la frequenza:
(4.3)
Calcolando questa frequenza per ciascuna trave e considerando come accettabile
il valore minimo ottenuto, si può affermare che la frequenza massima per cui
l’approssimazione delle onde vibrazionali della struttura può essere considerata
qualitativamente accettabile è .
L’esperienza maturata sul modello di piastra PLATE e un breve esame sulla FrF
diretta della struttura TRUSS hanno orientato la scelta della fascia MF verso
l’intervallo di frequenza .
A questo punto dell’indagine, le informazioni a disposizione sono sufficienti per
poter applicare il metodo Energy Operator di C. Soize sulla struttura TRUSS.
I valori dei parametri (già presentati nel paragrafo 3.2.2) per il run sono
rispettivamente:
Punti di applicazione dell’eccitazione nei 3 sottocasi di carico sui nodi ;

99
Sensori posizionati nei nodi
; Frequenze centrali ;
Ampiezza di banda ;
Fattore di correzione di bordo ;
Parametri d’integrazione , e ;
Coefficiente di smorzamento ;
Tipo di smorzamento (RAYM)
Numero di modi del modello ridotto richiesti .
Il risultato di questa simulazione è visibile in Figura 4.2.7:
Figura 4.2.7: FrF diretta vs metodo MF per struttura TRUSS
Come si può facilmente notare, nonostante vi sia una perfetta corrispondenza tra
la FrF diretta e quella calcolata col metodo Energy Operator per quanto riguarda
la parte immaginaria, la parte reale presenta ancora una differenza tra le 2
funzioni, questa volta associata alla seconda sottobanda. La natura dell’errore è
esattamente la stessa del caso della piastra, ovvero sembra esserci una differenza
costante tra la FrF approssimata col metodo di C. Soize e la FrF diretta.
100
Il fenomeno che apparentemente non si presenta più come nel caso della piastra
è la limitazione nella quantità di modi che il programma può calcolare per
ciascuna banda; in realtà, il problema è sempre presente, sebbene la maggiore
complessità della struttura fornisce ovviamente a parità di fascia di frequenza un
numero maggiore di modi.
Per comprendere l’origine di questo strano comportamento, sono state fatte delle
analisi ulteriori sulla struttura, sia calcolando dei parametri per valutare la bontà
del modello geometrico e l’approssimazione ad elementi finiti, sia modificando
il codice di calcolo. Il tutto è presentato nei successivi paragrafi 4.2.4, 4.2.5 e
4.2.6.
4.2.4. Funzione di densità modale e analisi delle frequenze
proprie di ciascuna trave
La prima analisi che è stata fatta per capire e successivamente correggere lo
strano comportamento dell’approssimazione con il metodo di C. Soize è il
calcolo del numero di frequenze proprie che sono presenti nella fascia MF
considerata per ciascuna trave. È opportuno sottolineare che, essendo la struttura
di tipo reticolare e non semplicemente una trave singola, le frequenze calcolate
non saranno le stesse della struttura TRUSS, ma almeno questo è un modo per
capire orientativamente se il numero di modi che si vuole estrarre dalla matrice
Energy Operator non superino i modi naturali che ciascuna trave possiede.
Operativamente, il calcolo dei modi naturali per ciascuna trave è il risultato
dell’analisi dinamica per una trave incastrata ad entrambi gli estremi (Figura
4.2.8).

101
Figura 4.2.8: Trave doppiamente incastrata
Per questo modello, la funzione spostamento trasversale è definita come:
(4.4)
con
. Sapendo che il coefficiente può anche essere espresso come
(4.5)
dove ovviamente è la frequenza propria e la massa per unità di lunghezza
della trave. Mettendo insieme le 2 espressioni di si ottiene una relazione che
lega direttamente la frequenza propria e il numero di modi :
(4.6)

102
Per cui, impostando una certa frequenza massima è possibile ottenere il
numero di modi (da arrotondare per difetto) che vi sono al di sotto di
questo limite.
Facendo girare il programma DMAP con gli stessi valori usati per il paragrafo
4.2.3, si ottengono i seguenti valori (riferirsi a Figura 4.2.9 per la numerazione
di ciascuna trave che compone la struttura TRUSS):
Figura 4.2.9: Numerazione travi TRUSS
Frequenza massima: 825 Hz
# trave 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
# modi 9 6 9 6 11 5 5 5 5 8 12 9 6 9 6 Tabella 4.2.2: Frequenze naturali travi TRUSS al di sotto di 825 Hz
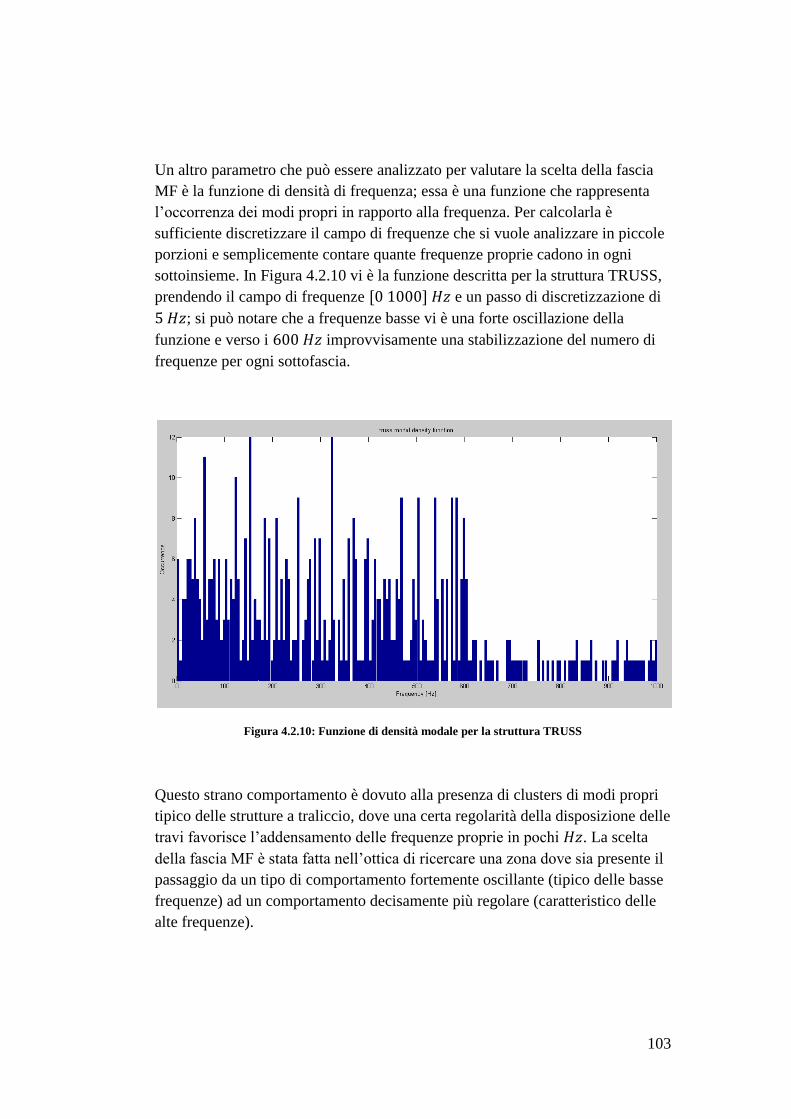
103
Un altro parametro che può essere analizzato per valutare la scelta della fascia
MF è la funzione di densità di frequenza; essa è una funzione che rappresenta
l’occorrenza dei modi propri in rapporto alla frequenza. Per calcolarla è
sufficiente discretizzare il campo di frequenze che si vuole analizzare in piccole
porzioni e semplicemente contare quante frequenze proprie cadono in ogni
sottoinsieme. In Figura 4.2.10 vi è la funzione descritta per la struttura TRUSS,
prendendo il campo di frequenze e un passo di discretizzazione di
; si può notare che a frequenze basse vi è una forte oscillazione della
funzione e verso i improvvisamente una stabilizzazione del numero di
frequenze per ogni sottofascia.
Figura 4.2.10: Funzione di densità modale per la struttura TRUSS
Questo strano comportamento è dovuto alla presenza di clusters di modi propri
tipico delle strutture a traliccio, dove una certa regolarità della disposizione delle
travi favorisce l’addensamento delle frequenze proprie in pochi . La scelta
della fascia MF è stata fatta nell’ottica di ricercare una zona dove sia presente il
passaggio da un tipo di comportamento fortemente oscillante (tipico delle basse
frequenze) ad un comportamento decisamente più regolare (caratteristico delle
alte frequenze).

104
4.2.5. Tentativo di cambio del solutore LANCZOS
A seguito delle analisi preliminari, che hanno fornito dei dati sul campo delle
medie frequenze leggermente diversi rispetto alle aspettative iniziali, e
nell’ottica del miglioramento della performance globale del programma DMAP,
è stato fatto un tentativo di modifica del metodo per il calcolo degli autovalori
del sistema associato alla matrice Energy Operator per capire se fosse questo
passaggio l’origine del problema.
Al posto del comando LANCZOS, che implementa il metodo omonimo, è stato
applicato il comando READ, un Modulo di DMAP che permette di estrarre gli
autovalori reali simmetrici di un sistema dato. Come già detto, l’obiettivo è di
migliorare la qualità del risultato, anche a discapito di un costo computazionale
più elevato.
La particolarità di READ è che permette di far impostare dall’utente il metodo
di soluzione, tramite il Parametro METH; si può scegliere:
LAN = Lanczos;
INV = Metodo delle potenze inverso;
SINV = Metodo delle potenze inverse con sequenza di Sturm;
GIV = Metodo di Givens (tridiagonalizzazione);
MGIV = Metodo di Givens modificato;
HOU = Metodo di Householder;
MHOU = Metodo di Householder modificato;
AGIV = Selezione automatica di GIV o MGIV;
AHOU = Selezione automatica di HOU o MHOU.
Il tentativo di applicazione del comando READ è stato fatto selezionando di
volta in volta un metodo diverso; il risultato purtroppo è stato più o meno lo
stesso: tutti i metodi salvo Lanczos hanno presentato un fatal error.
È stata fatta un’indagine per determinare l’origine del problema ed
effettivamente si è scoperto che le 2 matrici che venivano indicate come input al
Modulo, e , risultano non essere simmetriche definite positive, come

105
richiesto da READ stesso; in aggiunta, né né , le matrici di massa del
sistema, risultano simmetriche definite positive.
Per fugare ogni dubbio sull’affidabilità del calcolo degli autovalori tramite il
comando LANCZOS, sono state estratte dal programma DMAP le 2 matrici
e , giusto prima di entrare come input nel Modulo; è stato creato uno script
Matlab ad hoc e tramite il comando sono stati estratti gli autovalori
associati. Il confronto con gli autovalori estratti dal programma DMAP ha
evidenziato che non vi è alcuna differenza tra i 2 risultati.
Si è concluso quindi che un cambio di solutore per il problema agli autovalori
associato alla matrice Energy Operator non è necessario e che il Modulo
LANCZOS non influisce negativamente sul calcolo dei risultati del programma
DMAP. Il problema risiede quindi sicuramente nella parte di programma a
monte del Modulo LANCZOS.
4.2.6. Valutazione del contributo energetico di ciascun modo
e rappresentazione delle forme modali
In parallelo al tentativo di cambio di solutore per il problema agli autovalori, è
stato svolto un diverso tipo di analisi, ovvero il calcolo del contributo energetico
degli autovalori estratti dal modello ridotto.
Infatti, il grande punto di forza del metodo di C. Soize, ereditato dai metodi
POD, è che l’Energy Operator per sua natura permette di calcolare in modo
diretto la quantità di energia del sistema associata a ciascun suo autovalore:
(4.7)
e pure il suo peso percentuale:
(4.8)

106
Questa caratteristica permette di valutare quanto effettivamente ciascun modo
calcolato (riflesso diretto di ciascun autovalore) contribuisce alla risposta del
sistema e ridurre ulteriormente la dimensione del modello ridotto, senza perdere
una quantità significativa di energia.
Il risultato dell’analisi mostra che effettivamente vi sono dei modi che
contribuiscono maggiormente alla composizione della risposta della struttura,
mentre il resto può essere trascurato senza far perdere una percentuale rilevante
dell’energia. Se si costruisce una funzione che presenti in ascissa il numero
identificativo del modo (preventivamente organizzati in ordine decrescente) e in
ordinata il suo valore, è possibile vedere quanto i primi modi da soli possano
rappresentare qualitativamente bene l’energia della risposta e quanto i più
piccoli siano percentualmente irrilevanti. In Figura 4.2.11 vi è un confronto tra
le funzioni calcolate per la prima e la quinta banda; si può vedere che per la
quinta banda la funzione decade molto velocemente, quindi per questa fascia è
sufficiente prendere un numero ridotto di autovalori al fine di avere un risultato
energeticamente soddisfacente; al contrario, nella prima banda vi sono molti
modi che contribuiscono in modo significativo alla risposta energetica, quindi
sarà necessario tenere in considerazione un numero di autovalori maggiore.

107
Figura 4.2.11: Funzione autovalori banda #1 e #5 struttura TRUSS
Il programma Matlab di supporto a quest’analisi permette non solo di
visualizzare il contributo percentuale di ciascun modo, ma di impostare una
percentuale desiderata di energia e vedere quanti modi per ogni banda devono
essere utilizzati per raggiungere il dato livello di energia. Nelle Tabella 4.2.3 e
Figura 4.2.12 è mostrato un esempio di quanto detto, per la struttura TRUSS con
le medesime impostazioni del paragrafo 4.2.3; in questo contesto risulta

108
importante sottolineare che il modello ridotto è a 45 modi e che la percentuale di
energia che si vuole catturare è del 95%.
% Energia catturata da ciascun modo
ID modo Banda
575-625 Hz
Banda 625-675
Hz
Banda 675-725
Hz Banda
725-775 Hz Banda
775-825 Hz
1 2,95% 7,76% 8,77% 12,39% 10,99%
2 2,95% 7,63% 8,65% 12,14% 10,07%
3 2,95% 7,48% 8,41% 10,03% 9,76%
4 2,95% 7,20% 8,36% 7,60% 8,15%
5 2,94% 7,15% 7,76% 7,36% 7,79%
6 2,94% 5,08% 7,23% 6,07% 6,29%
7 2,94% 4,96% 6,95% 5,30% 5,51%
8 2,94% 3,84% 6,76% 4,55% 5,14%
9 2,90% 3,50% 5,43% 3,98% 4,39%
10 2,87% 2,63% 4,74% 2,98% 3,76%
11 2,87% 2,52% 3,68% 2,90% 3,59%
12 2,87% 2,27% 3,38% 2,42% 2,66%
13 2,87% 2,07% 2,09% 2,19% 2,49%
14 2,83% 2,04% 1,81% 1,96% 2,23%
15 2,83% 1,79% 1,37% 1,81% 1,97%
16 2,83% 1,60% 1,27% 1,56% 1,67%
17 2,83% 1,48% 1,22% 1,42% 1,39%
18 2,83% 1,47% 1,13% 1,33% 1,11%
19 2,58% 1,33% 1,11% 1,32% 1,05%
20 2,50% 1,32% 0,77% 1,04% 0,99%
21 2,47% 1,32% 0,74% 0,80% 0,83%
22 2,17% 1,32% 0,61% 0,76% 0,81%
23 2,15% 1,32% 0,57% 0,71% 0,75%
24 2,15% 1,19% 0,55% 0,60% 0,62%
25 2,15% 1,19% 0,47% 0,56% 0,51%
26 2,15% 1,19% 0,46% 0,54% 0,50%
27 2,15% 1,19% 0,41% 0,52% 0,46%
28 2,14% 1,07% 0,38% 0,44% 0,41%
29 2,13% 1,07% 0,35% 0,42% 0,39%
30 2,13% 1,07% 0,34% 0,41% 0,39%

109
31 2,05% 1,07% 0,32% 0,39% 0,36%
32 1,80% 1,04% 0,32% 0,35% 0,34%
33 1,57% 1,03% 0,32% 0,32% 0,32%
34 1,48% 1,03% 0,31% 0,31% 0,29%
35 1,44% 1,03% 0,30% 0,28% 0,25%
36 1,43% 1,03% 0,30% 0,28% 0,23%
37 1,43% 0,87% 0,29% 0,27% 0,22%
38 1,42% 0,85% 0,28% 0,25% 0,20%
39 1,41% 0,83% 0,28% 0,24% 0,20%
40 1,21% 0,71% 0,28% 0,24% 0,19%
41 1,21% 0,71% 0,27% 0,23% 0,17%
42 1,20% 0,71% 0,27% 0,22% 0,16%
43 1,20% 0,70% 0,25% 0,19% 0,16%
44 1,15% 0,69% 0,24% 0,17% 0,16%
45 1,04% 0,62% 0,22% 0,15% 0,10% Tabella 4.2.3: Energia % catturata da ciascun modo per struttura TRUSS
Figura 4.2.12: Modi necessari per catturare 95% dell'energia della struttura TRUSS
Vedendo che è possibile selezionare i modi desiderati per avere un certo livello
di energia catturato dalla risposta, come controprova è stato modificato il
programma DMAP inserendo un ulteriore parametro, , che
rappresenta il numero di modi che vanno effettivamente a comporre la FrF
calcolata col metodo MF; quindi il numero di modi estratti sarà sempre ,
ma quelli utilizzati in realtà saranno quelli che contribuiscono di più, in quantità
. In Figura 4.2.13 vi è un esempio di questo concetto; la funzione di sinistra
è stata ottenuta estraendo ed utilizzando 40 modi, mentre quella di destra
presenta una FrF calcolata con solo 30 modi, a fronte dei 40 estratti. Come si

110
può facilmente notare, la differenza tra le 2 FrF è veramente ridotta ad eccezione
della prima banda in frequenza, dove addirittura la risposta con meno modi
sembra approssimare meglio la FrF diretta; questo perché, come già detto, per
cogliere bene la quantità di energia contenuta nella struttura per la prima banda è
necessario prendere un numero elevato di autovalori, superiore ai 30 usati
nell’esempio.
Figura 4.2.13: Risposta TRUSS prendendo meno modi di quelli calcolati
Per concludere, è importante guardare la rappresentazione grafica delle forme
modali associate agli autovalori estratti col metodo MF. È opportuno precisare
che queste non sono le forme dei modi propri di vibrare del sistema, che
effettivamente rappresentano la posizione che la struttura assumerebbe
prendendo una fotografia ad una data frequenza; tuttavia dare uno sguardo alla
loro forma può fornire un segnale che ponga dei dubbi sull’effettiva attendibilità
degli autovalori estratti, soprattutto nel caso di singolarità o valori fuori scala.
In Figura 4.2.14 è possibile vedere che il primo modo relativo alla quinta banda
è abbastanza regolare, ma le travi della struttura sembrano torcersi come per
formare un’elica, cosa che non sembra avere molto senso fisico; è opportuno
notare che questi modi estratti non sono una rappresentazione fisica della
vibrazione della struttura ma il contenuto energetico della stessa. Se si tiene
inoltre conto che il programma DMAP non riesce ad approssimare
perfettamente la FrF diretta, si può ritenere plausibile questo tipo di
comportamento.

111
Figura 4.2.14: Modo #1 banda #5 per la struttura TRUSS
4.3. La struttura a traliccio SPACE
A fronte degli studi fatti sulla struttura TRUSS, si è visto che il programma che
implementa il metodo di C. Soize fornisce dei risultati accettabili, sebbene a
volte non completamente soddisfacenti.
Si è notato inoltre che la struttura TRUSS in sé risulta troppo rigida e vi sono
numerosi clusters di modi propri (come c’è da aspettarsi da una struttura di
dimensioni regolari).
Per ovviare a ciò e al contempo analizzare una struttura più complessa e più
vicina a quella che è la realtà delle strutture reticolari, si è deciso di lavorare

112
sulla struttura SPACE, che è la ripetizione (per 4 volte) nel senso della
lunghezza di TRUSS.
Questo capitolo ricalca la struttura del capitolo 4.2: nel paragrafo 4.3.1 vi è una
breve descrizione della geometria della struttura SPACE; successivamente
(4.3.2) viene presentata la scelta della fascia MF ed una prima applicazione del
metodo di riduzione; il paragrafo 4.3.3 si concentra sulle analisi energetiche e
sulla rappresentazione grafica delle forme modali; infine (4.3.4) viene presentato
il tentativo di variazione della fascia MF e di vincolo della struttura, con
l’obiettivo di comprendere l’origine del funzionamento non completamente
soddisfacente del programma DMAP.
4.3.1. Descrizione della struttura SPACE
Questa struttura, come la precedente TRUSS, è un assemblaggio di travi
(sezione ad U). Nel dettaglio è composta da 4 baie, ognuna delle quali è identica
a TRUSS nella disposizione delle travi, ma la lunghezza di ciascuna baia nella
direzione longitudinale è diversa; questa differenza di dimensione è dovuta al
fatto che la periodicità della struttura avrebbe comportato la formazione di
numerosi clusters di modi propri sin dalle basse frequenze.
Per una descrizione dettagliata delle caratteristiche geometriche e fisiche per la
singola baia, si può fare riferimento ai dati mostrati nel paragrafo 4.2.1; la
dimensione longitudinale di ciascuna baia è , ,
e .
Nella sua globalità, la struttura ha quindi le seguenti dimensioni: ,
e .
Il numero totale di nodi della struttura è 1132, per un totale di 6792 gradi di
libertà.
In Figura 4.3.1 vi è la rappresentazione grafica della struttura SPACE:

113
Figura 4.3.1: Struttura SPACE
Lo schema di applicazione dei carichi è il medesimo usato per la struttura
TRUSS; la scelta dei punti di eccitazione è ancora una volta in punti specifici,
ovvero 3 dei 4 spigoli che appartengono alla faccia anteriore (nodi 1, 469 e 517).
I sensori sono stati posizionati negli stessi nodi e in altri punti particolari, come
mostrato in Figura 4.3.2:
Figura 4.3.2: Sensori ed attuatori struttura SPACE

114
4.3.2. Scelta fascia MF e applicazione del metodo di riduzione
Come già visto nel paragrafo 4.2.3, la scelta della fascia MF da usare non è
casuale, ma frutto di considerazioni empiriche (e non) sulle lunghezze d’onda
delle vibrazioni e modi propri di ciascuna trave che compone la struttura. Anche
per SPACE è stato usato questo tipo di approccio per il calcolo della massima
frequenza per cui i risultati possono essere qualitativamente attendibili e si è
trovata una frequenza di , che conferma sostanzialmente la scelta
della fascia MF .
Per avere una prova ulteriore in questa scelta, si è analizzata ancora una volta la
funzione di densità modale; in Figura 4.3.3 è mostrata la funzione calcolata per
la struttura SPACE:
Figura 4.3.3: Densità modale SPACE
Come è possibile notare, il cambiamento di comportamento da fortemente
oscillante (LF) a sostanzialmente costante (HF) cade ancora nella medesima
fascia di frequenza.

115
A seguito di queste analisi, si è proceduto ad applicare il metodo di C. Soize alla
struttura appena descritta. I valori dei parametri (già presentati nel paragrafo
3.2.2 e 4.2.3) per il run sono rispettivamente:
Punti di applicazione dell’eccitazione nei 3 sottocasi di carico sui nodi ;
Sensori posizionati nei nodi 1 469 517 61 121 597 613 704 1104 410 661 ;
Frequenze centrali ;
Ampiezza di banda ;
Fattore di correzione di bordo ;
Parametri d’integrazione , e ;
Coefficiente di smorzamento ;
Tipo di smorzamento (RAYM)
Numero di modi del modello ridotto richiesti .
In Figura 4.3.4 è presentato il primo risultato grafico; la FrF calcolata col
programma DMAP tenta di approssimare la FrF diretta ma in più di una
occasione risulta distante dalla funzione reale. Basti vedere il comportamento
della parte immaginaria della FrF, che non è ben allineata con l’andamento reale
della FrF diretta, come invece capitava per la struttura TRUSS.
Figura 4.3.4: FrF SPACE 45 modi

116
L’effetto di questo comportamento si affievolisce all’aumentare dei modi da
ricercare; in Figura 4.3.5 è possibile notare la differenza tra il caso e
quello con :
Figura 4.3.5: FrF SPACE 70 modi
4.3.3. Valutazione del contributo energetico di ciascun modo
e rappresentazione delle forme modali
Con la stessa filosofia operativa del paragrafo 4.2.6, sono stati analizzati i
parametri energetici che possono essere estratti facilmente applicando il metodo
di C. Soize.
Per prima cosa, in Figura 4.3.6, viene mostrata la funzione degli autovalori
(bande #1 e #5) per la struttura SPACE nel caso a 70 modi:

117
Figura 4.3.6: Funzione autovalori banda #1 e #5 struttura SPACE
Come si può facilmente notare, a differenza del caso della struttura TRUSS dove
per la banda #5 la funzione decadeva molto più velocemente, il numero di
autovalori che occorrerà considerare per valutare la risposta della struttura è
decisamente superiore. Per la banda #1 il discorso non cambia rispetto al caso di
TRUSS, dove già vi erano parecchi autovalori con entità non trascurabile.

118
Andando a valutare tramite il programma di supporto in Matlab il contributo
percentuale di ciascun modo per ogni banda, è possibile confermare che la
diffusione dell’energia è su un numero di modi decisamente più alto (Tabella
4.3.1 e Figura 4.3.7):
% Energia catturata da ciascun modo
ID modo
Banda Banda Banda Banda Banda
575-625 Hz
625-675 Hz
675-725 Hz
725-775 Hz
775-825 Hz
1 1,59% 2,23% 2,24% 3,00% 2,58%
2 1,59% 2,22% 2,24% 2,96% 2,57%
3 1,59% 2,21% 2,24% 2,96% 2,57%
4 1,59% 2,21% 2,22% 2,91% 2,57%
5 1,59% 2,19% 2,22% 2,82% 2,57%
6 1,59% 2,17% 2,22% 2,81% 2,55%
7 1,59% 2,17% 2,22% 2,81% 2,54%
8 1,58% 2,14% 2,21% 2,81% 2,50%
9 1,58% 2,08% 2,18% 2,70% 2,48%
10 1,58% 2,02% 2,13% 2,68% 2,47%
11 1,58% 2,01% 2,11% 2,51% 2,36%
12 1,58% 1,99% 2,11% 2,42% 2,34%
13 1,58% 1,97% 2,11% 2,37% 2,30%
14 1,58% 1,97% 2,11% 2,23% 2,22%
15 1,58% 1,97% 2,08% 2,21% 2,22%
16 1,58% 1,97% 2,07% 2,20% 2,22%
17 1,58% 1,97% 1,99% 2,06% 2,22%
18 1,57% 1,96% 1,93% 2,03% 2,18%
19 1,57% 1,96% 1,89% 2,01% 2,06%
20 1,56% 1,95% 1,87% 1,99% 1,97%
21 1,55% 1,94% 1,80% 1,98% 1,94%
22 1,55% 1,93% 1,79% 1,98% 1,91%
23 1,55% 1,92% 1,77% 1,85% 1,81%
24 1,55% 1,90% 1,75% 1,85% 1,70%
25 1,55% 1,88% 1,75% 1,70% 1,70%

119
26 1,55% 1,81% 1,75% 1,65% 1,70%
27 1,55% 1,72% 1,75% 1,63% 1,70%
28 1,54% 1,70% 1,70% 1,56% 1,64%
29 1,54% 1,66% 1,68% 1,52% 1,62%
30 1,54% 1,62% 1,62% 1,45% 1,62%
31 1,54% 1,58% 1,62% 1,44% 1,62%
32 1,54% 1,53% 1,58% 1,30% 1,62%
33 1,52% 1,45% 1,56% 1,29% 1,60%
34 1,52% 1,39% 1,46% 1,29% 1,55%
35 1,52% 1,33% 1,38% 1,28% 1,46%
36 1,52% 1,31% 1,37% 1,28% 1,45%
37 1,52% 1,27% 1,23% 1,26% 1,37%
38 1,52% 1,25% 1,22% 1,21% 1,37%
39 1,52% 1,24% 1,16% 1,11% 1,32%
40 1,51% 1,24% 1,15% 1,08% 1,24%
41 1,50% 1,23% 1,14% 1,04% 1,16%
42 1,49% 1,20% 1,14% 1,01% 1,10%
43 1,48% 1,19% 1,13% 0,99% 1,05%
44 1,47% 1,17% 1,10% 0,96% 1,02%
45 1,47% 1,16% 1,08% 0,95% 0,98%
46 1,46% 1,14% 1,06% 0,88% 0,95%
47 1,45% 1,10% 1,06% 0,84% 0,94%
48 1,42% 1,10% 1,03% 0,81% 0,83%
49 1,39% 1,10% 1,01% 0,76% 0,80%
50 1,37% 1,09% 1,01% 0,75% 0,80%
51 1,36% 1,06% 1,01% 0,70% 0,74%
52 1,35% 1,03% 0,99% 0,64% 0,71%
53 1,26% 1,02% 0,96% 0,63% 0,66%
54 1,26% 0,89% 0,93% 0,61% 0,66%
55 1,23% 0,88% 0,90% 0,61% 0,65%
56 1,19% 0,84% 0,86% 0,61% 0,65%
57 1,18% 0,84% 0,85% 0,58% 0,65%
58 1,16% 0,83% 0,85% 0,58% 0,60%
59 1,16% 0,83% 0,85% 0,58% 0,58%
60 1,16% 0,79% 0,83% 0,55% 0,57%

120
61 1,15% 0,75% 0,81% 0,55% 0,56%
62 1,15% 0,75% 0,78% 0,55% 0,53%
63 1,14% 0,72% 0,74% 0,54% 0,52%
64 1,12% 0,71% 0,73% 0,53% 0,48%
65 1,11% 0,69% 0,70% 0,49% 0,45%
66 1,10% 0,67% 0,65% 0,46% 0,44%
67 1,07% 0,63% 0,64% 0,45% 0,41%
68 1,05% 0,60% 0,61% 0,41% 0,38%
69 1,00% 0,56% 0,55% 0,38% 0,35%
70 0,97% 0,38% 0,51% 0,36% 0,35% Tabella 4.3.1: Energia % catturata da ciascun modo per struttura SPACE
Figura 4.3.7: Modi necessari per catturare 95% dell'energia della struttura SPACE
Infatti, per poter cogliere il dell’energia della risposta, è necessario
ricorrere a quasi la totalità degli autovalori estratti.
Per concludere l’analisi delle caratteristiche energetiche della struttura SPACE,
si è usato il programma di supporto in Matlab per plottare i modi calcolati col
metodo di C. Soize; come nel precedente caso di TRUSS, l’aspetto non risulta
apparentemente plausibile da un punto di vista fisico, ma considerando che
questi modi sono una rappresentazione dell’energia contenuta nella struttura,
non devono necessariamente assomigliare al vero movimento che la struttura ha
ad una certa frequenza. In Figura 4.3.8 sono presentate le forme del primo modo
per le bande #1 e #5:

121
Figura 4.3.8: Modo #1 bande #1 e #5 per la struttura SPACE
4.3.4. Analisi del comportamento della struttura in condizione
vincolata e a frequenze più elevate
L’obiettivo del lavoro di tesi è stato non solo garantire il funzionamento del
programma DMAP, ma anche il suo miglioramento. Di conseguenza, in
parallelo (cfr. paragrafo 3.3.2) al lavoro di analisi delle caratteristiche modali ed
energetiche delle strutture, si è cercato di capire l’origine dello strano
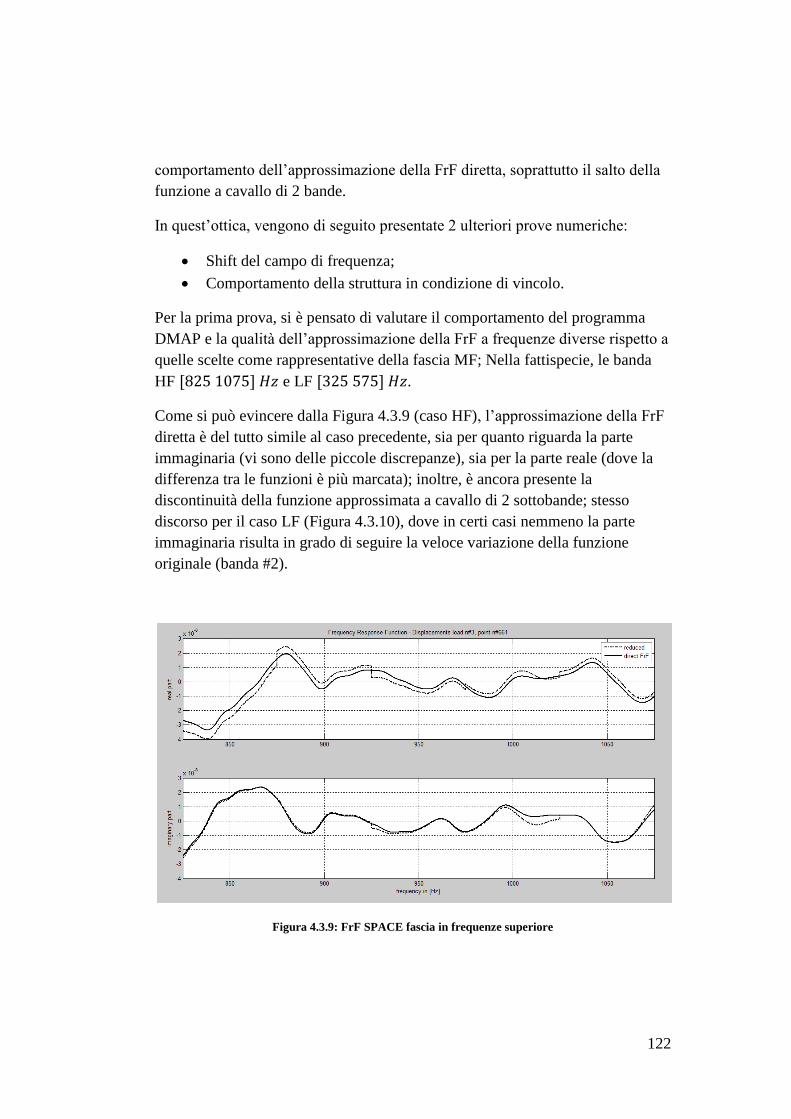
122
comportamento dell’approssimazione della FrF diretta, soprattutto il salto della
funzione a cavallo di 2 bande.
In quest’ottica, vengono di seguito presentate 2 ulteriori prove numeriche:
Shift del campo di frequenza;
Comportamento della struttura in condizione di vincolo.
Per la prima prova, si è pensato di valutare il comportamento del programma
DMAP e la qualità dell’approssimazione della FrF a frequenze diverse rispetto a
quelle scelte come rappresentative della fascia MF; Nella fattispecie, le banda
HF e LF .
Come si può evincere dalla Figura 4.3.9 (caso HF), l’approssimazione della FrF
diretta è del tutto simile al caso precedente, sia per quanto riguarda la parte
immaginaria (vi sono delle piccole discrepanze), sia per la parte reale (dove la
differenza tra le funzioni è più marcata); inoltre, è ancora presente la
discontinuità della funzione approssimata a cavallo di 2 sottobande; stesso
discorso per il caso LF (Figura 4.3.10), dove in certi casi nemmeno la parte
immaginaria risulta in grado di seguire la veloce variazione della funzione
originale (banda #2).
Figura 4.3.9: FrF SPACE fascia in frequenze superiore

123
Figura 4.3.10: SPACE fascia in frequenze inferiore
Da questo confronto si può concludere che il cambio di frequenza non comporta
un miglioramento della qualità dell’approssimazione.
Per la seconda prova, si è inoltre valutato il comportamento della struttura in
condizione vincolata; il vincolo è stato applicato in un unico punto (per
comodità si è scelto il punto 1, quello in basso a destra nella faccia anteriore
della struttura SPACE), bloccando tutti i suoi gradi di liberà.
Come si può evincere guardando le Figura 4.3.11 e Figura 4.3.12, che
rappresentano rispettivamente le FrF estratte per il punto 1104 e terza
condizione di carico in condizione prima libera e poi vincolata, il fatto di
bloccare o meno la struttura non influisce sulla qualità dell’approssimazione del
metodo dell’Energy Operator; ciò che cambia è semplicemente la forma della
funzione da approssimare, cosa ovviamente normale visto che la risposta in
frequenza di una struttura vincolata è diversa rispetto a quella della stessa
struttura libera nello spazio.
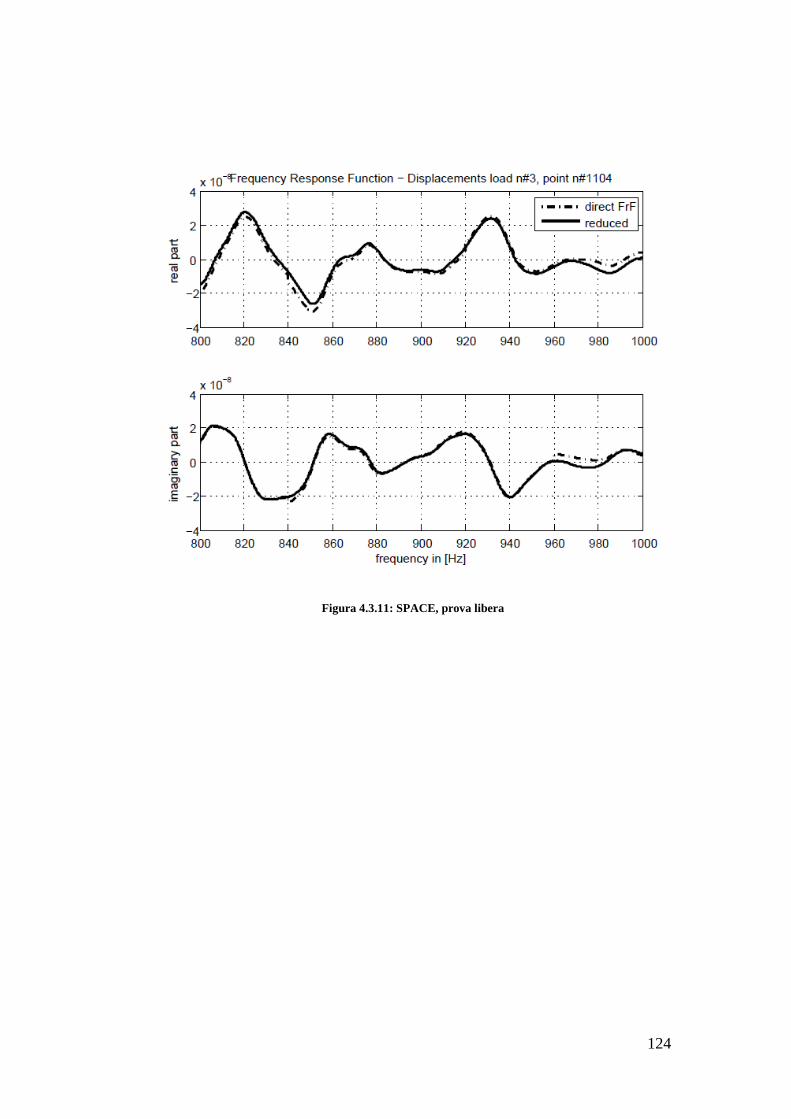
124
Figura 4.3.11: SPACE, prova libera
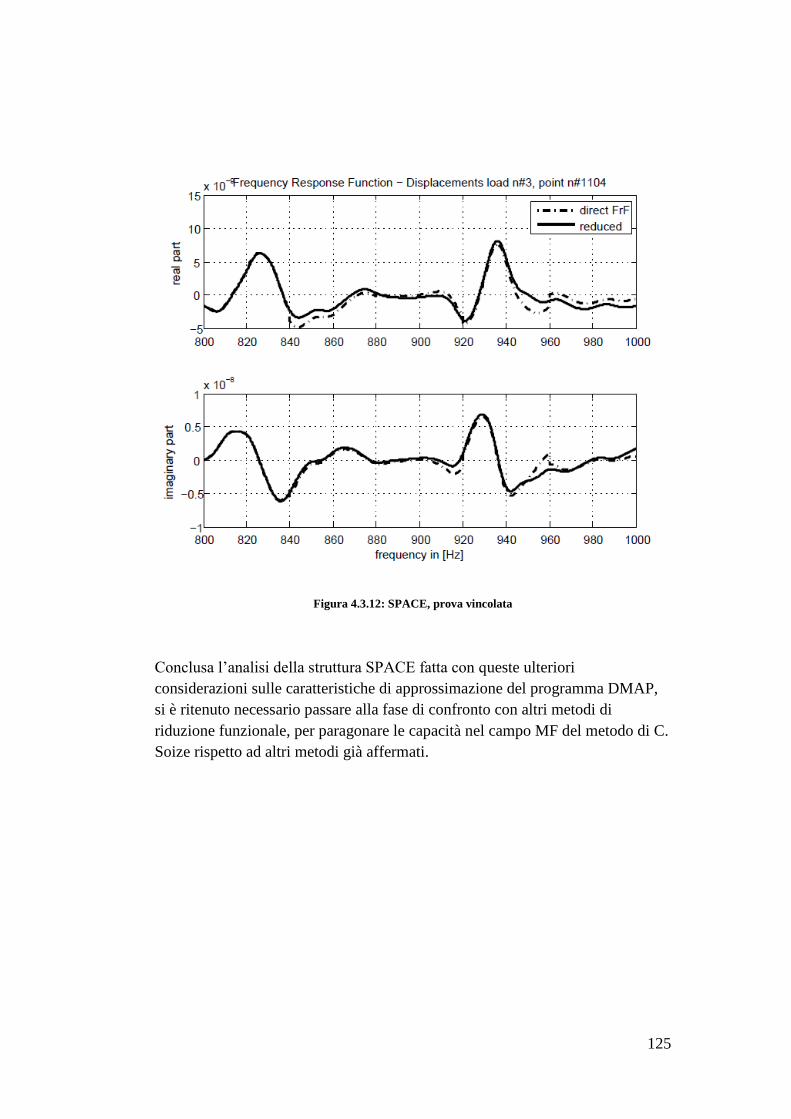
125
Figura 4.3.12: SPACE, prova vincolata
Conclusa l’analisi della struttura SPACE fatta con queste ulteriori
considerazioni sulle caratteristiche di approssimazione del programma DMAP,
si è ritenuto necessario passare alla fase di confronto con altri metodi di
riduzione funzionale, per paragonare le capacità nel campo MF del metodo di C.
Soize rispetto ad altri metodi già affermati.

126
5. CONFRONTO CON ALTRI METODI DI RIDUZIONE
5.1. Introduzione
Per poter provare l’effettiva efficacia del metodo dell’Energy Operator di C.
Soize è necessario fare un confronto con altri metodi di riduzione funzionale per
strutture approssimate ad elementi finiti.
Come detto nel capitolo introduttivo 1.2, i metodi dedicati per le medie
frequenze non sono ancora sufficientemente maturi per poter rappresentare dei
buoni termini di paragone; per questo si è scelto di proporre il confronto con un
metodo adatto alle basse frequenze (LF) ed uno per le alte frequenze (HF),
entrambi adattati al campo MF.
Nel paragrafo 5.2 viene presentato, a rappresentare i metodi LF, l’analisi modale
classica, di cui viene data una brevissima introduzione teorica e le operazioni di
implementazione del metodo su MSC.Nastran, prima di mostrare un confronto
col metodo dell’Energy Operator.
Il paragrafo 5.3 invece illustra un metodo HF sviluppato da Y. Le Guennec
nell’ambito di un progetto di dottorato presso ONERA. Esattamente come per il
paragrafo precedente, viene mostrata la base teorica su cui si fonda questo
metodo (5.3.1), il processo necessario per poter confrontare i risultati dei 2
metodi (5.3.2) ed infine vengono presentati i risultati veri e propri del confronto.
5.2. L’Energy Operator vs l’analisi modale classica
5.2.1. Breve introduzione teorica

127
L’analisi modale classica è uno strumento utilizzato in molti campi dell’analisi
dinamica di strutture; uno di questi campi è l’analisi della risposta forzata, dove
esso contribuisce a una notevole riduzione del costo computazionale [18].
Infatti, il calcolo della risposta per l’equazione di moto
(5.1)
Comporta l’inversione della matrice del sistema per ogni punto in frequenza
(5.2)
I parametri modali di un sistema non smorzato sono un insieme di autovalori (o
frequenze naturali) e i loro corrispondenti autovettori (o forme modali). Per
questo tipo di struttura, la vibrazione non decade nel tempo ed è quindi possibile
stabilire una soluzione di tentativo nella forma . Siccome
, il problema di identificare i modi normali della struttura si riduce
a risolvere:
(5.3)
Che è soddisfatta da esattamente modi nel caso di un sistema a gradi di
libertà. Chiamando le forme modali e le corrispondenti frequenze
proprie, allora
(5.4)
Accorpando i modi propri e le frequenze proprie, ridefinite come autovalori
,in matrici, si ottiene

128
(5.5)
Esse rappresentano la matrice diagonale degli autovalori e la matrice degli
autovettori.
Normalmente, se si ha la possibilità di calcolare queste matrici, risulta
conveniente trasformare il sistema in coordinate modali , ottenendo
(5.6)
Dove
è la matrice degli autovettori normalizzata
rispetto alla massa modale del singolo grado di libertà.
Lo spostamento fisico è invece espresso come .
È possibile notare come le coordinate modali sono indipendenti le une dalle altre
e che ogni coordinata può essere vista come un sistema a un singolo grado di
libertà.
Quando si va a considerare la risposta forzata, assumendo che il sistema sia
eccitato da una forzante armonica, è possibile definire la FrF recettanza
come
(5.7)
La matrice di recettanza è simmetrica, come del resto sono e .
129
La soluzione diretta dell’equazione (5.7) per le singole FrF per un certo numero
di punti in frequenza è tuttavia costosa e inefficiente poiché normalmente un
numero limitato di risposte è necessario per stabilire con una sufficiente
accuratezza la risposta del sistema, senza contare che ogni singolo punto in
frequenza richiede l’inversione dell’intero sistema.
In questo senso le proprietà modali della struttura possono essere utilizzate
vantaggiosamente. Effettuando alcune manipolazioni sulla matrice recettanza, la
si può esprimere in termini di forme modali e autovalori:
(5.8)
L’equazione (5.8) riduce il costo computazionale della matrice di risposta ad
una semplice inversione di una matrice diagonale. Nel caso che fosse necessaria
solo una singola FrF, l’equazione precedente può essere ulteriormente ridotta
alla sommatoria
(5.9)
Dove tutti gli modi sono inclusi, e e indicano rispettivamente le coordinate
relative alla risposta (il sensore) e all’eccitazione (l’attuatore), nell’autovettore
del modo .
È stato evidenziato che l’analisi di grandi strutture è spesso riducibile alla
risposta di pochi modi e che la quantità di questi modi è normalmente piccola
. Questo vale anche per la risposta ad una forzante agente su uno spettro
di frequenze molto ampio; in questo caso, la FrF può essere calcolata lo stesso a
partire da un numero limitato di modi con una sufficiente accuratezza, e
l’equazione (5.9) diventa

130
(5.10)
Normalmente copre tutti i modi all’interno della fascia di frequenza
d’interesse e alcuni modi fuori dalla banda. La validità di questa
approssimazione si basa sul fatto che modi a frequenze superiori partecipano
debolmente alla risposta del sistema.
5.2.2. Implementazione in NASTRAN
Per poter effettuare il confronto tra il metodo di riduzione di C. Soize e i risultati
ottenibili attraverso l’applicazione delle tecniche di analisi modale classica, si è
utilizzato nuovamente MSC.NASTRAN.
È stato creato uno script basato sulla SOL 111 (risposta modale in frequenza),
modificato per poter estrarre le FrF desiderate.
Il resto dei parametri di input (morfologia, materiali e proprietà della struttura,
come del resto vincoli e forzanti) è identico al set usato per l’analisi della
struttura TRUSS mostrata nel capitolo 4.2.
La visualizzazione dei risultati, le varie FrF, è stata fatta con Matlab,
similarmente ai precedenti capitoli.
5.2.3. Confronto col metodo di C. Soize
Il confronto tra il metodo di C. Soize e l’analisi modale classica può essere fatto
semplicemente contando il numero di modi necessari per raggiungere un certo
livello di qualità nell’approssimazione della FrF. Quello che ci si aspetta è che,
ovviamente, il numero di modi propri necessario per approssimare la FrF nel
campo MF sia notevolmente superiore rispetto a quelli che vengono estratti
dall’Energy Operator.
Vi sono 2 strade possibili per questo calcolo:

131
Calcolare i modi propri a partire da fino alla frequenza massima
della banda MF scelta;
Costruire una FrF usando solo i modi naturali che cadono all’interno
della banda MF.
Per svolgere le analisi appena proposte, basta calcolare il numero di modi propri
della struttura, estrarre gli autovettori associati e costruire la FrF approssimata;
col comando di MSC.Nastran si può impostare la quantità di modi
desiderati, oppure imporre dei limiti in frequenza e calcolare la FrF soltanto con
i modi che cadono in quella banda.
Nel primo caso, si è calcolato la FrF approssimata usando tutti i modi propri fino
alla frequenza minima della banda d’interesse ( ), fino a metà banda
( ) e fino al limite superiore della stessa ( ), secondo la tabella
seguente:
Frequenze proprie struttura TRUSS
Banda # modi propri
[0 575] Hz 449
[0 700] Hz 496
[0 825] Hz 512 Tabella 5.2.1: Numero modi propri struttura TRUSS da 0 Hz
Nelle Figura 5.2.1, Figura 5.2.2 e Figura 5.2.3 sono presentati i risultati di
questa indagine per il sensore posizionato nel punto , corrispondente alla
mezzeria della trave diagonale della faccia posteriore; ovviamente, l’obiettivo di
questo confronto è semplicemente mostrare che per poter ben approssimare la
FrF è necessario estrarre tutti i modi propri fino al limite superiore della banda
d’interesse.

132
Figura 5.2.1: FrF TRUSS usando modi propri fino a 575 Hz

133
Figura 5.2.2: FrF TRUSS usando modi propri fino a 700 Hz

134
Figura 5.2.3: FrF TRUSS usando modi propri fino a 825 Hz
Nel secondo caso, per vedere quale fosse il comportamento dell’analisi modale
classica rispetto al metodo dell’Energy Operator, sono stati calcolati i modi
propri relativi alla sola banda MF desiderata; i risultati sono mostrati nelle
Figura 5.2.4, Figura 5.2.5 e Figura 5.2.6:
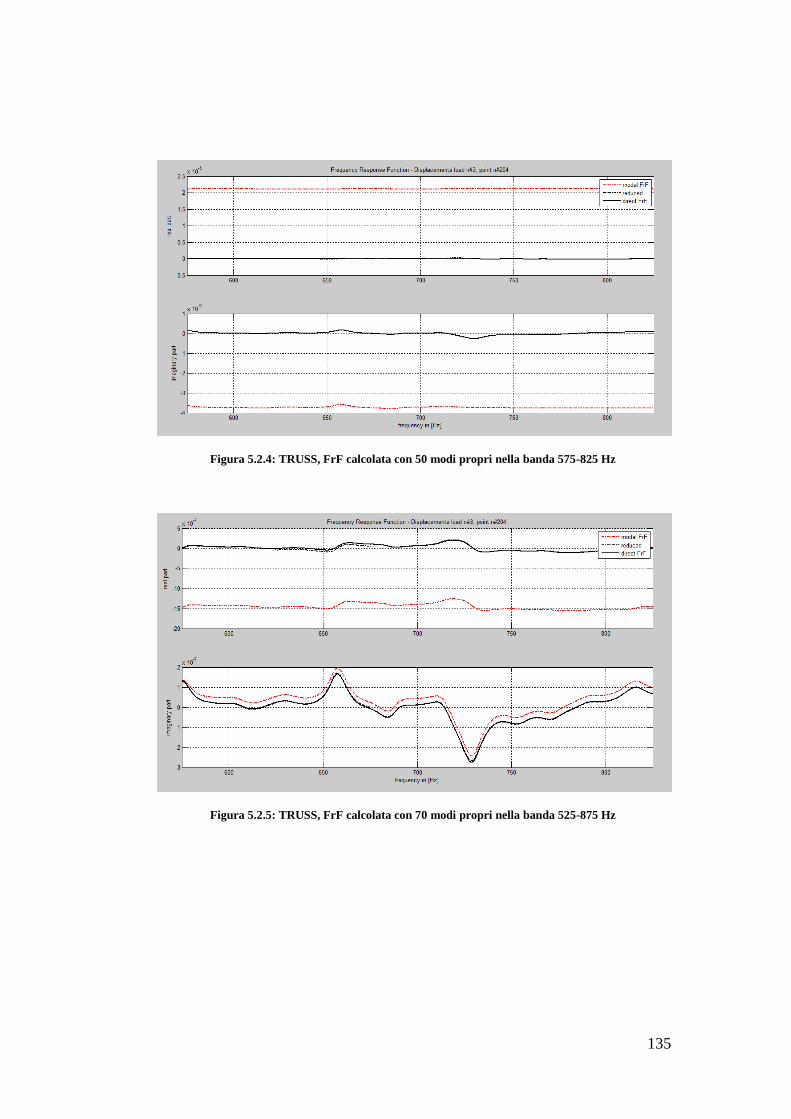
135
Figura 5.2.4: TRUSS, FrF calcolata con 50 modi propri nella banda 575-825 Hz
Figura 5.2.5: TRUSS, FrF calcolata con 70 modi propri nella banda 525-875 Hz
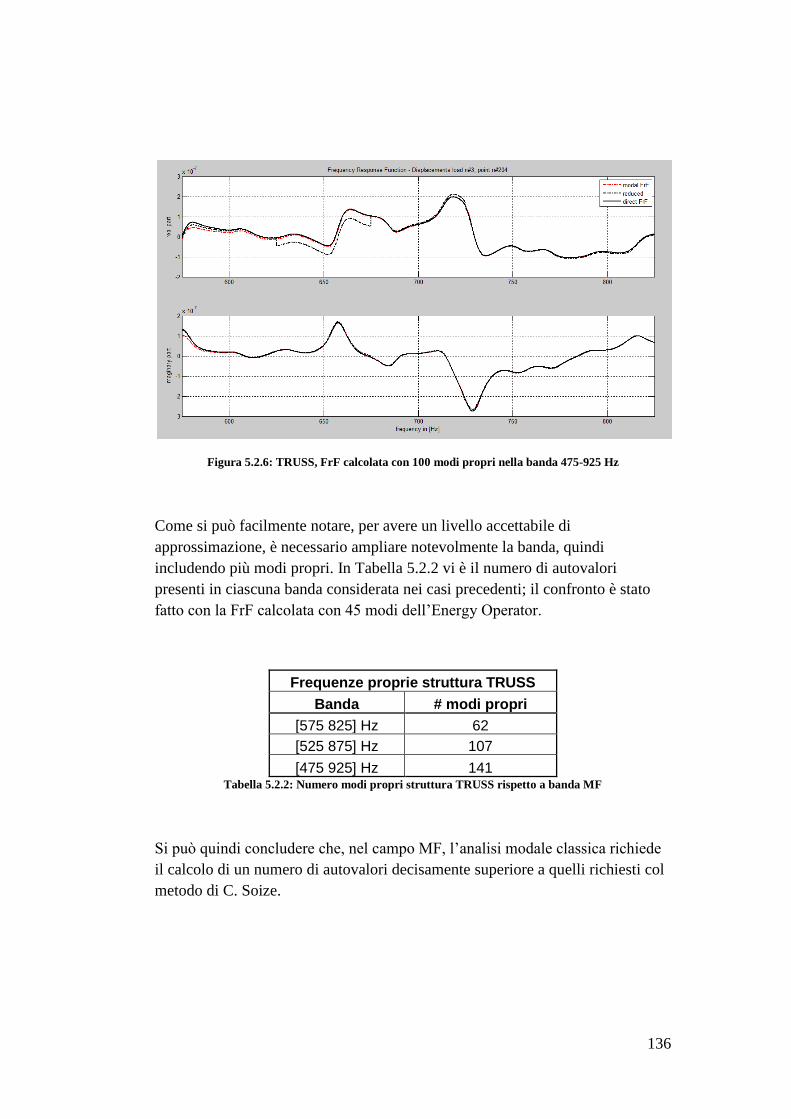
136
Figura 5.2.6: TRUSS, FrF calcolata con 100 modi propri nella banda 475-925 Hz
Come si può facilmente notare, per avere un livello accettabile di
approssimazione, è necessario ampliare notevolmente la banda, quindi
includendo più modi propri. In Tabella 5.2.2 vi è il numero di autovalori
presenti in ciascuna banda considerata nei casi precedenti; il confronto è stato
fatto con la FrF calcolata con 45 modi dell’Energy Operator.
Frequenze proprie struttura TRUSS
Banda # modi propri
[575 825] Hz 62
[525 875] Hz 107
[475 925] Hz 141 Tabella 5.2.2: Numero modi propri struttura TRUSS rispetto a banda MF
Si può quindi concludere che, nel campo MF, l’analisi modale classica richiede
il calcolo di un numero di autovalori decisamente superiore a quelli richiesti col
metodo di C. Soize.

137
5.3. L’Energy Operator vs un metodo HF
5.3.1. Breve introduzione teorica
Il metodo esposto qui di seguito è frutto di uno studio effettuato da Y. Le
Guennec nell’ambito di un dottorato presso l’ONERA [19].
L’obiettivo della ricerca è la costruzione di un metodo affidabile per valutare
l’evoluzione dell’energia all’interno di strutture tridimensionali formate da travi
alla Timoshenko nell’ambito delle alte frequenze HF; questo metodo permette di
prevedere così lo stato energetico della struttura in condizioni di regime.
Per prima cosa, viene analizzato il comportamento della struttura, modellata
secondo il modello di Timoshenko: la sua cinematica, a differenza del modello
di trave classica, include gli effetti dello sforzo di taglio.
Il punto materiale appartenente ad una sezione viene parametrizzato in modo
tale che , dove sono le coordinate del punto rispetto
alla sezione normale descritta dalla base ortonormale formata dai vettori e
e è la sua coordinata sulla fibra neutra orientata secondo il vettore tangente .
La cinematica di Timoshenko viene quindi espressa come
(5.11)
Dove , lo spostamento della fibra neutra è e
rappresenta il vettore rotazione rispetto alla sezione normale al piano neutro.
Assumendo piccole perturbazioni e introducendo il vettore
in con e rispettivamente la risultante
delle forze e dei momenti agenti sulla sezione normale, è possibile scrivere le
equazioni costitutive di una sezione normale rigida all’interno di una trave
tridimensionale nella forma di un problema iperbolico:

138
(5.12)
Dove
con la densità
volumetrica del materiale, l’area della sezione normale, la matrice dei
momenti d’inerzia, il tensore di flessibilità
traslazionale, quello rotazionale e infine l’operatore
definito come
(5.13)
Dove é la matrice identità .
Questo sistema è adatto per studiare la propagazione dell’energia perché la
densità di energia è
.
Infatti, la propagazione HF corrisponde ad onde altamente oscillanti nello
spazio, che è difficile da descrivere con l’equazione classica delle onde; l’onda
che rappresenta l’energia varia molto più dolcemente.
In questo contesto è possibile mostrare che la densità d’energia per una data
sezione normale ad una data ascissa è espressa come
(5.14)
Dove sono i modi energetici ottenuti dalla
decomposizione della matrice definita tramite l’equazione (5.13). denota i
modi di compressione longitudinale e i 2 modi di flessione, mentre quelli di

139
torsione e i 2 di taglio. Le velocità di queste onde sono rispettivamente
e .
Viene definito inoltre un vettore che identifica il flusso di densità d’energia
; nel campo HF esso è definito come
(5.15)
Dove con il numero dell’onda e la direzione di
propagazione della stessa. L’evoluzione delle intensità specifiche è descritta
dalla seguente equazione di trasporto
(5.16)
Per poter descrivere compiutamente la propagazione della densità di energia è
necessario studiare i meccanismi di trasmissione/riflessione delle onde in
corrispondenza delle giunzioni della struttura. Le giunzioni rappresentano le
uniche opportunità di accoppiare i modi energetici e quindi diffondere l’energia
in tutta la struttura. È stato rilevato tramite le simulazioni numeriche che, nella
banda HF, quando un’onda traslazionale (o, alternativamente, rotazionale)
raggiunge una giunzione della struttura, non vengono generate onde rotazionali
(o, alternativamente, traslazionali).
Nel mettere in opera il modello numerico associato questo metodo, è stato
escluso l’utilizzo del metodo agli elementi finiti classico, poiché in
corrispondenza delle giunzioni il flusso è in parte trasmesso e in parte riflesso,
causando una discontinuità del campo di densità d’energia. Viene quindi
utilizzato il metodo DG (Discontinous Galerkin), che possiede la proprietà di
“superconvergenza”, decisamente desiderabile per simulazioni temporali lunghe
che hanno come obiettivo di mostrare il limite di diffusione dell’equazione di
trasporto (5.16). L’integrazione in tempo viene effettuata attraverso uno schema
RK (Runge Kutta) fortemente stabile e ad alto ordine.

140
La simulazione numerica è stata effettuata su una struttura a travi di forma
piramidale (Figura 5.3.1), applicando un’onda di tipo gaussiano a direzione
fissata su una delle travi e andando a misurare per ogni trave la densità d’energia
in funzione del tempo (Figura 5.3.2); si può notare che per tempi lunghi la
densità di energia in ciascuna trave si stabilizza e che la densità di energia
globale si mantiene costante.
Figura 5.3.1: Struttura piramidale

141
Figura 5.3.2: Andamento dell'energia per struttura piramidale
5.3.2. Implementazione in MATLAB
Per poter rendere confrontabili i risultati ottenuti attraverso il metodo per le alte
frequenze proposto da Y. Le Guennec e il metodo di riduzione funzionale di C.
Soize, occorre innanzitutto effettuare alcuni passaggi intermedi.
L’output che può essere naturalmente estrapolato col metodo di C. Soize è la
matrice delle funzioni di risposta in frequenza FrF. Questo dato è decisamente
versatile, perché è espressione di come funziona il sistema, indipendentemente
dalla forzante applicata.
La risposta della struttura è quindi calcolabile semplicemente invertendo
la relazione

142
(5.17)
Dove è la matrice delle FrF e la forzante applicata sul sistema.
Il metodo HF proposto da Y. Le Guennec invece ha come principale output
l’energia meccanica della struttura in funzione del tempo.
Ipotizzando di voler rendere il dato ottenuto tramite il metodo di C. Soize
confrontabile col metodo per le alte frequenze, occorre effettuare 3 importanti
passaggi:
1. Trovare una maniera efficace per applicare sul sistema la condizione
iniziale individuata nello studio di Y. Le Guennec, il tutto nel dominio
delle frequenze;
2. Passare dal dominio delle frequenze a quello del tempo;
3. Calcolare l’energia totale della struttura in funzione del tempo a partire
dalla risposta (ovvero lo spostamento di ciascun punto) ottenuta col
metodo MF.
Per risolvere il primo problema [20], si può considerare un generico sistema
dinamico lineare MDOF (multi-degrees of freedom)
(5.18)
Con le condizioni iniziali
(5.19)
Attraverso l’analisi spettrale si può ricavare una base di autovettori per la
soluzione . Tuttavia, questo risultato è ottenibile soltanto nel caso di matrice
di smorzamento proporzionale alle matrici di massa e rigidezza e
termine di trasporto .
In generale, è possibile dimostrare [20] che si può manipolare l’equazione del
sistema (5.18) inserendo le condizioni iniziali (5.19) ottenendo

143
(5.20)
La cui trasformata di Fourier porta a
(5.21)
Dove è la rigidezza dinamica. Prendendo
l’inversa , che non è altro se non la matrice delle risposte in
frequenza, il calcolo della risposta si può leggere semplicemente come
(5.22)
Nell’ambito del confronto tra i 2 modelli, la condizione iniziale che viene
considerata è unicamente quella relativa alla velocità, quindi la forzante
applicata al sistema è semplificata come .
Riguardo il secondo punto, il problema è stato risolto semplicemente facendo
ricorso alle funzioni di Matlab Fast Fourier Transform e Inverse Fast
Fourier Transform .
Infine, il calcolo dell’energia meccanica del sistema nel dominio del tempo
viene fatto a partire dalla conoscenza degli spostamenti dei punti della struttura
in funzione del tempo, della loro velocità (dato ricavato ricorrendo alla funzione
di Matlab) e delle matrici di massa e rigidezza del sistema:
(5.23)
144
5.3.3. Confronto col metodo di C. Soize
Il primo passo per poter confrontare i risultati forniti dai 2 metodi, occorre
verificare che lo script Matlab creato a questo scopo funzioni correttamente.
In primo luogo, è possibile verificare che per un sistema non smorzato l’energia
totale si conserva, come è possibile vedere in Figura 5.3.3 per la struttura
SPACE se si prendono direttamente i modi propri esatti:
Figura 5.3.3: Energia totale SPACE con modi propri esatti
E, analogamente, prendendo solo i modi relativi alla fascia MF in
Figura 5.3.4:

145
Figura 5.3.4: Energia totale SPACE con modi propri esatti solo fascia MF
Le leggere variazioni che si possono notare all’inizio ed alla fine del periodo di
tempo considerato sono dovute all’effetto della conversione tra dominio delle
frequenze e dominio del tempo fatta tramite la Trasformata di Fourier.
Andando a guardare nel dettaglio l’energia meccanica di ciascun punto per un
qualsiasi istante di tempo, si può notare che il valore non è esclusivamente reale;
esiste infatti una componente complessa, che però è di svariati ordini di
grandezza inferiore rispetto alla controparte reale (il valore massimo del
rapporto tra parte immaginaria e reale è dell’ordine di ). Questo
comportamento è dovuto al fatto che, durante la trasformazione della risposta
del sistema dal dominio delle frequenze a quelle del tempo, l’operatore
di Matlab genera un piccolo errore computazionale. Un’altra spiegazione è che
il segnale, non essendo simmetrico, quando viene trasformato non diventa
completamente reale.
A questo punto, è possibile applicare il programma ausiliario Matlab usando i
modi estratti dall’Energy Operator. Operativamente, si è sostituita la matrice
contenente gli autovettori esatti con quelli (contenuti nella matrice ) che
vengono prodotti dal programma DMAP. Il risultato di quest’analisi è visibile in
Figura 5.3.5:

146
Figura 5.3.5: Energia totale SPACE con modi Energy Operator
Si vede che l’energia totale presenta un picco iniziale ed un andamento
oscillante; si può imputare questo comportamento alla presenza delle
discontinuità tra le bande, che influiscono in maniera diretta sulla forma degli
autovettori. Tuttavia, globalmente la funzione si stabilizza quasi subito ad un
valore costante e non molto diverso da quello trovato nel caso dei modi esatti.
Si può procedere quindi a separare i contributi di energia totale su ciascuna
trave, per poter finalmente fare il confronto col metodo HF di Y. Le Guennec.
Come si può vedere in Figura 5.3.6, non è possibile vedere il transitorio di
trasferimento di energia; questo probabilmente perché i tempi presi in
considerazione sono lunghi rispetto alla velocità di propagazione dell’energia
all’interno della struttura. Tuttavia, si vede che tutte e 4 le baie si assestano su
valori simili, questo in accordo col fatto che l’energia tende a distribuirsi in
modo uniforme su tutta la struttura a regime.

147
Figura 5.3.6: Energia totale SPACE, dettaglio per ciascuna baia
Durante il suo lavoro, Y. Le Guennec ha effettuato una prova usando proprio la
struttura SPACE; in Figura 5.3.7 i risultati ottenuti, normalizzati sia in tempo
che rispetto all’energia totale.

148
Figura 5.3.7: Metodo HF applicato a SPACE, Energia totale
Qui il transitorio di trasferimento di energia è visibile e, inoltre, si può
chiaramente vedere che le 4 baie tendono a raggiungere il medesimo livello di
energia, esattamente come il caso del metodo di C. Soize.
Si può quindi concludere che, pur non potendo giudicare se il metodo Energy
Operator sia migliore o peggiore rispetto a quello HF, si ottengono
qualitativamente gli stessi risultati; questo fatto conferma la bontà del
programma DMAP.

149
6. CONCLUSIONE E SVILUPPI POSSIBILI
Come già visto nei capitoli precedenti, le promettenti capacità di
approssimazione del metodo di C. Soize sono state globalmente confermate; si é
dimostrato inoltre che risulta molto facile estrarre ed analizzare le caratteristiche
energetiche della struttura, a partire dalla semplice conoscenza degli autovalori
della matrice Energy Operator.
Tuttavia é stato evidenziato durante tutta la serie di analisi effettuate che sotto
alcuni aspetti il programma DMAP che implementa il metodo presenta delle
lacune, sia in termini di qualità del risultato, sia in termini di flessibilità nella
scelta dei parametri.
Per questo è utile, nell’ottica di un processo di miglioramento delle performance
del programma, riassumere quelle che sono attualmente i punti aperti e le
problematiche ancora non risolte, illustrando le possibili soluzioni o, in
alternativa, la direzione da seguire per le future indagini.
È possibile suddividere questi punti in 2 categorie generali:
le problematiche, ovvero quegli aspetti che non permettono al
programma di funzionare nelle migliori condizioni possibili in termini di
capacità di fornire risultati e qualità degli stessi;
i miglioramenti, cioè alcune analisi che non sono state svolte durante il
lavoro di tesi per questioni di tempo, ma che rappresentano strade
percorribili per ottimizzare e ampliare le funzionalità attuali del
programma DMAP.
Cominciando con le problematiche riscontrate, quella che si è presentata quasi
immediatamente, sin dal primo run, è l’incapacità del programma DMAP di dare
all’utente flessibilità nella selezione dei modi da estrarre; si è
effettivamente trovato per ogni struttura un limite di modi per cui il programma
presenta un fatal error. Questo comportamento è sicuramente legato ad un
problema a monte del calcolo degli autovalori per iterazione dei sottospazi (cfr.
150
paragrafo 2.2.5 equazioni 2.87 e 2.88), poiché si è dimostrato (cfr. paragrafo
4.2.5) che il comando DMAP LANCZOS funziona correttamente.
In aggiunta, si è visto che la funzione approssimata presenta delle discontinuità
tra le bande strette in cui è diviso il dominio di frequenze analizzato; questo
comportamento é legato alla stessa causa della problematica precedente. Si è
visto (cfr. paragrafo 4.3.4) che esso non dipende né dal tipo di struttura
analizzata, né dal campo di frequenze, né dalle condizioni di vincolo, bensì dalle
operazioni che vengono fatte precedentemente al calcolo degli autovalori con
Lanczos.
Purtroppo durante il lavoro di tesi non si è riuscito a dare una spiegazione a
questo fenomeno; questo si configura come il punto chiave per dotare il
programma di una piena funzionalità.
Un'altra problematica riscontrata durante il progetto è la strana forma della
funzione di densità modale per le strutture trattate: normalmente i modi
dovrebbero essere meno densi nel campo LF e più densi in quello HF; per
TRUSS e SPACE accade il contrario. Per mancanza di tempo non ci si è
soffermati a trattare nel dettaglio questo aspetto, ma sarebbe interessante provare
ad costruire e studiare una struttura differente.
Passando ai possibili miglioramenti, sarebbe auspicabile provare a confrontare il
metodo di C. Soize con un altro modello studiato specificatamente per il campo
MF. Questo confronto permetterebbe di evidenziare le capacità del metodo
Energy Operator con un diretto concorrente e non con modelli adattati dagli altri
campi in frequenza (analisi modale classica o metodo HF di Y. Le Guennec).
Un altro aspetto che potrebbe portare ad un miglioramento della qualità dei
risultati ma al contempo un incremento del costo computazionale, è
l’infittimento della mesh per le strutture trattate; non è detto che un approccio di
questo tipo possa rivelarsi efficace, ma quantomeno varrebbe la pena di fare un
tentativo.
Ultimo spunto per provare a incrementare le prestazioni del programma è quello
di impostare il calcolo della FrF approssimata prendendo un’unica banda
sull’intero campo di frequenza di interesse. Già nel paragrafo 3.3.2 è stato
mostrato che, per il modello PLATE, prendendo una sola banda stretta al posto
delle 5 di default portava per forza di cose ad eliminare il problema della

151
discontinuità della FrF a cavallo tra una banda e l’altra; potrebbe essere
interessante applicare questa filosofia anche alle 2 strutture più complesse
TRUSS e SPACE.
Concludendo, il programma DMAP che implementa il metodo di riduzione
funzionale per il campo MF basato sull’Energy Operator ideato da C. Soize è
uno strumento efficace per approssimare le FrF di una struttura tridimensionale
di tipo traliccio per applicazione in campo spaziale; nonostante sotto alcuni
aspetti possa essere ancora migliorato, il programma DMAP costruito durante il
lavoro di tesi fornisce una certa affidabilità per le analisi dinamiche nel campo
MF.

152
APPENDICE
CENNI STORICI SU ONERA
L’ONERA è il centro francese per la ricerca aerospaziale [21]. Dal 1946 è sotto
la tutela del Ministero della Difesa francese, conta più di 1500 ricercatori
suddivisi tra 8 differenti siti in Francia. Il suo modello di ricerca, atipico, associa
la performance scientifica a quella economica: tutti gli studi effettuati da
ONERA portano risultati che si concretizzano in innovazioni a beneficio dei
suoi clienti e partners.
Figura A.0.1: Facts su ONERA
L'ampio budget a disposizione permette di allestire mezzi di simulazione
sperimentale unici in Europa; le loro ricerche coprono tutto lo spettro della
ricerche sviluppo aeronautica e spaziale, delle ricerche sulle tecnologie

153
industrializzabili. A livello internazionale, l’ONERA ha come principale partner
il DLR tedesco, ma intrattiene anche rapporti con i suoi omologhi europei
tramite l’EREA (association of European research Establishements in
Aeronautics).
I campi di ricerca spaziano da quello energetico, aerodinamico, materiali
strutture, elettromagnetismo, ottica, fisica della strumentazione, ambiente
atmosferico spaziale, sistemi complessi e imbarcati, trattamento
dell'informazione. I vari dipartimenti operano su una visuale applicativa di
medio e lungo termine.
Riguardo l’organizzazione interna di ONERA [22], vi sono 5 grandi settori
tecnici (Meccanica dei fluidi ed energetica, Fisica, Materiali e strutture,
Trattamento dell’informazione e sistemi, Grandi mezzi tecnici) a loro volta
suddivisi in sottounità (Figura Figura A.0.2), per un totale di 21 dipartimenti:
Figura A.0.2: Settori scientifici e dipartimenti di ONERA
Sulla scala TRL (Technology Readiness Level), l’ONERA si posiziona
maggiormente tra i livelli 2 e 6. In Figura Figura A.0.3 è presente una breve
descrizione grafica della scala TRL:

154
Figura A.0.3: Technology Readiness Level (TRL)
La capacità di ONERA di fornire alto valore aggiunto alle ricerche effettuate,
porta le aziende partner ad avere un forte vantaggio competitivo; i fattori
principali di questo valore aggiunto sono:
Grande competenza nella comprensione fisica dei fenomeni,
modellizzazione, simulazione e sperimentazione;
Disponibilità di licenze per programmi di simulazione numerica e diversi
strumenti sviluppati internamente per l’analisi dei problemi in tutti i
campi di sviluppo;
Capacità di trasferire il know-how alle aziende partner, nell’ambito di un
programma di accompagnamento scientifico nella messa in opera delle
soluzioni proposte;
Esperienza nella scelta di una buona orientazione tecnologica dei
programmi che entreranno in sviluppo nel giro di 5/10 anni, e di cui i
prodotti dovranno restare operativi per 30/40 anni.
Questi fattori hanno reso ONERA un importante polo di ricerca tecnologico, in
Francia prima di tutto, ma anche a livello internazionale; a livello aerospaziale, i

155
maggiori risultati raggiunti negli ultimi anni, a livello di ritorno tecnologico,
sono [21]:
Le gallerie del vento di Modane e Midi-Pyrénées sono state utilizzate da
AIRBUS per lo sviluppo aerodinamico dei propri aeromobili, dal primo
A300, all’A380 fino al nuovo A350; in particolare, l’uso di questi
strumenti ha permesso ad AIRBUS di studiare con maggiore dettaglio
l’andamento dei flussi motore e di ottimizzare l’interazione tra nacelle e
resto dell’aeromobile, permettendo così un guadagno in tempo e costo di
sviluppo;
Nel campo elicotteristico, ONERA ha sviluppato strumenti di
simulazione numerica e sperimentale per definire profili ed estremità
delle pale, al fine di creare nuove forme che permettano di ridurre
considerevolmente il rumore prodotto durante l’esercizio; ONERA ha
creato il programma di analisi di calcolo acustico usato da Eurocopter
per prevedere e ridurre gli effetti sonori; attualmente la maggior parte
delle pale montate su elicotteri Eurocopter hanno profili concepiti da
ONERA;
Durante la concezione del nuovo aereo commerciale di Dassault
Aviation, il Falcon 7X, ONERA ha contribuito significativamente
all’ottimizzazione dell’aerodinamica e nel ridurre la resistenza e, di
riflesso, il consumo; più di 2500 ore di test sperimentali in galleria del
vento hanno permesso di validare le previsioni numeriche e favorito
alcune opzioni tecnologiche, tra cui la scelta delle winglets;
Lo sviluppo del programma FERMAT per modellizzare le onde
elettromagnetiche e predire la loro interazione con l’ambiente;
L’intera concezione e realizzazione del sistema di tracciamento di
satelliti GRAVES, tramite studi di fattibilità, la definizione
dell’architettura e la valutazione delle performances tramite un
dimostratore, dotando così l’Aeronautica francese di un sistema capace
di seguire i satelliti in orbita bassa;
Contribuzione allo sviluppo dei missili aria-terra ASMP (Air Sol
Moyenne Portée) a vantaggio del Dipartimento della Difesa francese; il
contributo ONERA è principalmente orientato sull’aerodinamica interna
ed esterna, le leggi di pilotaggio e l’ottimizzazione delle performance;
Partecipazione allo sviluppo dei nuovi droni da combattimento UCAV,
attraverso lo studio di nuove leggi di controllo, sistemi di

156
mimetizzazione radar e infrarossa, forme non convenzionali come assi
principali di ricerca;
Attraverso la partnership con le grandi agenzie spaziali NASA, ESA e
CNES, lo studio di sensori accelerometrici ultrasensibili per applicazioni
nel campo dell’oceanografia, la geodesia, la geofisica, la climatologia e
la fisica fondamentale; già dagli anni ’60, ONERA si è orientata verso lo
sviluppo di sospensioni senza contatto (con l’aiuto delle forze
elettrostatiche) delle masse di prova per ottenere dei sensori
ultrasensibili;
Tramite l’uso della galleria del vento verticale di Lille (una delle 3 al
mondo, con quelle della NASA e dei russi) è stato possibile studiare il
comportamento della sonda spaziale Huygens nel suo percorso di
ingresso nell’atmosfera di Titano, per le 2 fasi di traiettoria balistica ad
alta sollecitazione termodinamica e quella di stabilizzazione della sonda
in caduta libera e di apertura del paracadute;
Sviluppo del progetto IFATS per il controllo automatico delle rotte
aeree; il sistema di controllo permetterà (in una prospettiva di
applicazione a lungo termine, orientativamente 2040/2050) di gestire il
traffico automaticamente, calcolando le traiettorie ottimali per gli aerei e
garantendo un elevato livello di sicurezza ed aiutando
nell’ottimizzazione del consumo di carburante.
BREVE DESCRIZIONE DEL PROGRAMMA
MSC.NASTRAN E DEL CODICE DI
PROGRAMMAZIONE DMAP
MSC.Nastran è un programma ad elementi finiti che fornisce una vasta gamma
di capacità di analisi [16]. Questa tecnologia permette di risolvere agevolmente
problemi che pochi anni fa erano impossibili da trattare.
Il metodo ad elementi finiti fa parte della grande famiglia dei metodi di analisi
ingegneristica. Essa può essere suddivisa in 2 categorie: i metodi analitici e
quelli numerici.
157
I metodi analitici si prefiggono di risolvere i problemi costruendo direttamente
le equazioni differenziali che governano il sistema a partire da principi
fondamentali della fisica. Il vantaggio di questo approccio è l’alto grado di
fedeltà rispetto alla realtà fornito da soluzioni di questo tipo.
I metodi numerici, d’altro canto, hanno differenti formulazioni, a seconda del
tipo di problema da affrontare: possono puntare a minimizzare l’espressione
dell’energia potenziale della struttura sull’intero dominio (metodi energetici);
cercare soluzioni approssimate che soddisfino le equazioni differenziali del
problema salvo che sul contorno (metodi a elementi di contorno); rimpiazzare le
equazioni differenziali che governano il problema con equazioni algebriche
(differenze finite); rappresentare la struttura come un insieme di elementi la cui
versatilità permette una capacità di generalizzazione del problema virtualmente
illimitata (elementi finiti). MSC.Nastran fa parte di quest’ultima categoria.
Esso è scritto in linguaggio FORTRAN e risulta adattabile facilmente a qualsiasi
tipo di computer o di sistema operativo. Si compone di un gran numero di
blocchi preassemblati chiamati moduli; ciascun modulo è una catena di
sottoprogrammi FORTRAN, scritti per effettuare una specifica azione, come ad
esempio modellare la geometria, assemblare matrici, applicare vincoli, risolvere
problemi matriciali ecc…
I moduli sono controllati da un linguaggio interno chiamato DMAP (Direct
Matrix Abstraction Program). Ogni tipo di analisi disponibile in MSC.Nastran è
chiamata Sequenza di Soluzione, ognuna delle quali è composta da una lista
predefinita contenente migliaia di comandi DMAP.
A seconda del tipo di analisi da effettuare, si può scegliere una particolare
Sequenza di Soluzione di MSC.Nastran. I programmi CAD permettono di creare
il modello ad elementi finiti che viene tradotto in un file di input; questo
contiene quindi una completa descrizione delle caratteristiche del sistema, quali:
Tipo di analisi da effettuare;
Geometria del modello;
Elenco degli elementi finiti;
Carichi applicati;
Vincoli applicati (condizioni al contorno);
Richieste da parte dell’utente sul tipo di output da calcolare.

158
La struttura del file di input è formata da 5 parti distinte, di cui 3 obbligatorie, e
3 separatori, come riassunto in Figura Figura B.0.1:
Figura B.0.1: Struttura del file di input per MSC.Nastran
Le caratteristiche principali di ciascuna sezione sono:
NASTRAN Statement (facoltativo): serve per modificare alcuni
parametri operazionali, quali la memoria da allocare, le dimensioni
massime delle matrici, proprietà specifiche dell’ordinatore ecc…;

159
File management section (facoltativo): serve principalmente per
inizializzare il database Nastran e i files FORTRAN, come le specifiche
sulle dimensioni massime o dei nomi specifici dei files;
Executive control section (obbligatorio): qui viene specificato quale tipo
di analisi effettuare e il tempo massimo di calcolo; per indicare la fine di
questa sezione è consuetudine collocare il comando CEND;
Case control section (obbligatorio): tutte le informazioni contenute
all’interno sono chiamate comandi; la Case control section è usata per
specificare e controllare il tipo di risultato richiesto per l’analisi (come
ad esempio forze, sforzi e spostamenti); al suo interno vengono inoltre
specificati i set di dati in input, i sottocasi di analisi e selezionati carichi
e condizioni al contorno;
Bulk data section (obbligatorio): questa sezione segue sempre la Case
control section ed inizia con il comando BEGIN BULK; essa contiene
tutto ciò che è necessario per descrivere il modello geometrico ad
elementi finiti, i sistemi di coordinate, gli elementi finiti, le loro
proprietà, carichi, condizioni al contorno e proprietà dei materiali; la
sezione finisce sempre con il comando ENDDATA.
La preparazione del file di input a mano può comportare un’enorme perdita di
tempo, essere noiosa e fonte di errore. Per questo motivo vengono usati pre e
post processori (come MSC.Patran o Femap) per preparare il modello ad
elementi finiti per via grafica e per aiutare nella visualizzazione e
l’interpretazione dei risultati. Inoltre, il fatto di aver creato il modello
geometrico tramite un software grafico, permette di poterlo modificare
facilmente nel caso vengano evidenziati dalle analisi effettuate che è necessario
apportare dei cambiamenti. Il ruolo dei pre e post processori è ben
schematizzato in Figura B.0.2:

160
Figura B.0.2: Pre e Post processori nell'analisi ad elementi finiti
A seconda del tipo di analisi da effettuare, MSC.Nastran richiede di specificare
nella Executive control section la Sequenza di soluzione desiderata; le Sequenze
di soluzione più utilizzate sono elencate in Figura Figura B.0.3:

161
Figura B.0.3: Sequenze di Soluzione
MSC.Nastran non permette di modificare il codice sorgente che sta alla base
delle Sequenze di soluzione, ma consente che vengano aggiunti dei comandi;
essi possono essere introdotti dall’utente nella Executive control section tramite
il comando ALTER, seguito dalle istruzioni aggiuntive scritte in codice DMAP;
per identificare la conclusione della modifica, viene utilizzato il comando
ENDALTER.
Come già accennato precedentemente, DMAP è un codice con un proprio
compilatore e regole grammaticali [23]. Un programma DMAP consiste in una

162
serie di Moduli, che possono presentarsi in 2 forme distinte: matrici, che
obbediscono alle regole dell’algebra, e tabelle, che rappresentano una
conveniente raccolta di elementi. Vi sono inoltre dei Parametri, scalari usati per
specificare caratteristiche di controllo, di operazione o di sistema. I Moduli
possono essere usati come parametri di input, di output o entrambi. I parametri
di input influiscono sulle iperazioni interne ai Moduli, mentre quelli di output
sono usati per controllare la logica di DMAP e/o per passare informazioni
scalari ai Moduli seguenti.
Le istruzioni che possono essere fornite a MSC Nastran tramite DMAP sono di
2 tipologie: Moduli e Dichiarazioni (Statements in inglese). Un Modulo è simile
ad una funzione macro e, in generale, processa i Data Block come input e/o
output. Un Modulo può avere anche Parametri come input e/o output.
L'istruzione di un Modulo ha la forma seguente: il nome del Modulo seguito da
una virgola [,] e una lista di input separati da virgole, una barra [/], una lista di
output separati da virgole, una barra, una lista di parametri separati da barre:
nome del modulo, lista di input/lista di output/lista dei parametri $
il segno del dollaro [$] è necessario per terminare l'istruzione del Modulo.
Possono anche essere utilizzati Parametri all'interno del Modulo, sia come input,
sia come output.
Una Dichiarazione è una qualsiasi istruzione che non è un Modulo e che
tipicamente non produce Data Blocks di output a partire da Data Blocks o
Parametri di input. Le Dichiarazioni permettono di assegnare un valore ad un
parametro variabile, possono richiamare delle funzioni e/o permettere di
costruire dei loop logici di controllo (esattamente come i programmi FORTRAN
o MATLAB).
Combinando Moduli, Parametri e Dichiarazioni è possibile fornire a MSC
Nastran tutte le istruzioni necessarie per poter effettuare le analisi desiderate;
come già detto precedentemente, MSC Nastran permette di modificare le
Sequenze di soluzione o di scrivere sequenze di comandi personalizzate usando
DMAP. La compilazione, inserimento ed esecuzione dei programmi DMAP è
specificata tramite comandi nella Executive control section del file di input.

163
Per un ulteriore approfondimento riguardante il funzionamento delle Sequenze
di Soluzione di MSC Nastran e di DMAP, si consiglia la lettura delle guide
indicate in bibliografia.

164
NOMENCLATURA E ACRONIMI
Banda stretta
DADS Departement de Aéroélasticité et Dynamique de Structures
(Dipartimento Onera)
DG Discontinous Galerkin method
DMAP Direct Matrix Abstraction Program
Energy Operator
FEM Metodo degli elementi finiti
FrF Funzione di Risposta in Frequenza
HF Alte Frequenze (High frequencies)
KL o KLD Metodo Karhunen-Loeve (Karhunen-Loeve Decomposition)
LF Basse Frequenze (Low frequencies)
MDOF Sistema a molti gradi di libertà (Multi-Degrees of Freedom
system)
MF Medie Frequenze (Medium frequencies)
ONERA Office National d’Etudes et de Recherches Aérospatiales
PCA Analisi in Componenti Principali
PLATE Modello di piastra realizzato per le analisi in MSC.Nastran
POD Proper Orthogonal Decomposition
POM Proper Orthogonal Modes
POV Valori Ortogonali Propri
RK Schema di integrazione Runge Kutta
165
SEA Statistical Energy Analysis
SFEM Stochastic Finite Element Method
SOL xxx Sequenza di Soluzione di MSC.Nastran
SPACE Secondo modello di piastra realizzato per le analisi in
MSC.Nastran
SVD Decomposizione ai Valori Singolari
Funzione di Risposta in Frequenza
TRL Technology Readiness Level
TRUSS Primo modello di piastra realizzato per le analisi in MSC.Nastran
166
BIBLIOGRAFIA
[1] E. SAVIN, "Midfrequency Vibrations of a Complex Structure: Experiments
and Comparison with Numerical Simulations," AIAA Journal, vol. 40,
2002.
[2] R., A., SARKAR GHANEM, "Reduced models for the medium-frequency
dynamics of stochastic systems," Journal of Acoustics, vol. 113, February
2003.
[3] C. SOIZE, "Reduced models in the medium frequency range for general
dissipative structural-dynamics systems," vol. 17, 1998.
[4] C. SOIZE, "Medium frequency linear vibrations of anisotropic elastic
structures," vol. 5, 1982.
[5] Y. C. LIANG, "Proper Orthogonal Decomposition and its applications —
Part I: Theory," vol. 252, 2002.
[6] KIM, "Frequency-domain Karhunen-Loeve Method and its Application to
Linear Dynamic Systems," AIAA Journal, vol. 36, no. 11, November 1998.
[7] KERSCHEN, "The Method of Proper Orthogonal Decomposition for
Dynamical Characterization and Order reduction of Mechanical Systems:
an Overview," Nonlinear Dynamics, vol. 41, 2005.
[8] LIANG Y. C., "A neural-network-based method of model reduction for
dynamic simulation of MEMS," Journal of Micromechanics and
Microengineering, vol. 11, 2001.
[9] B. F., KAPPAGANTU, R. FEENY, "On the physical interpretation of
proper orthogonal modes in vibrations," vol. 211, 1998.
[10] VAKAKIS F. MA X., "Karhunen-Loeve Decomposition of the Transient
Dynamics of a Multibay Truss," AIAA Journal, vol. 37, no. 8, August 1999.

167
[11] VAKAKIS A., BERGMAN L. MA X., "Karhunen-Loeve Modes of a
Truss: Transient Response Reconstruction and Experimental Verification,"
AIAA Journal, vol. 39, no. 4, April 2001.
[12] WEICKUM G., "A multi-point reduced-order modeling approach of
transient structural dynamics with application to robust design
optimization," Springer, vol. 38, 2009.
[13] SPANOS P. GHANEM R., "Stochastic Finite Elements: A Spectral
Approach," Springer Verlag, 1991.
[14] R., SARKAR, A. GHANEM, "Numerical Analysis of Stochastic
Dynamical Systems in the Medium-Frequency Range," 2001.
[15] DESANTI, "Manuel d'utilisation du Logiciel de Modelisation des
Transferts Solidiens en Moyennes Frequences MSC.Nastran + DMAP
Onera," Diffusion Onera, 2001.
[16] MSC.Software, Getting Started with MSC Nastran - User’s Guide.: MSC
Software Corporation, 2012.
[17] V. KEHR, "Caracterisation de la reponse transitoire des structures
complexes aeronautiques - choix du cas test," Diffusion Onera, 2009.
[18] H. GRAFE, "Model Updating of Large Structural Dynamics Models Using
Measured Response Functions," 1998.
[19] Y., SAVIN, E., CLOUTEAU, D. LE GUENNEC, "Transient dynamics of
three-dimensional beam trusses under impulse loads," , Hong Kong, 2012.
[20] AA. VV., "Structural Dynamics and Acoustics Lecture notes," 2011.
[21] ONERA, "Onera - retour sur innovation," Diffusion Onera, 2007.
[22] ONERA, "Onera - Retour sur innovation," Diffusion Onera, 2012.
[23] MSC.Software, MSC Nastran 2012 - DMAP Programmer's Guide.: MSC
Software Corporation, 2012.

168
[24] M. F. A., VAKAKIS, A. F. AZEEZ, "Proper orthogonal decomposition
(POD) of a class of vibroimpact oscillations," vol. 240, 2001.
[25] Y. LE GUENNEC, Transient dynamics of beam trusses under impulse
loads.: Ecole Centrale de Paris, 2012.
[26] RAVINDRA B., "Comments on "On the Physical Interpretation of Proper
Orthogonal Modes in Vibrations"," Journal of Sound and Vibration, vol.
219, 1999.

169
RINGRAZIAMENTI
Sembra passata un’eternità dall’ultima volta che ho dovuto scrivere una pagina
come questa, probabilmente troppo tempo. Tante cose sono cambiate: da allora
ho vissuto in tre città straniere, imparato a parlare 4 lingue, compreso cosa vuol
dire essere indipendente, cominciato a sporcarmi le mani con il vero lavoro e
apprezzato l’essere italiano, con tutti i suoi pregi e difetti.
Ma ancora di più, ho capito quanto importanti sono state tutte le persone che
hanno condiviso il percorso con me, a cominciare dalla mia famiglia, che mi ha
sostenuto costantemente anche nei momenti più difficili; gli amici di vecchia
data, quelli che anche se non ci si vede per un anno intero ti accolgono come se
fosse passato un solo giorno; i compagni di università con cui ho iniziato la mia
carriera e quelli con cui l’ho conclusa, senza di voi sarebbe stato impossibile
seguire i ritmi del Poli; gli amici della biblioteca, con cui ho condiviso giorni-
mesi-anni sui libri come se studiare fosse l’unica attività della nostra vita e gli
esami non dovessero finire mai (se ce l’ho fatta io, potete farcela anche voi!);
tutte le persone (ragazzi, allenatori, dirigenti e genitori) che contribuiscono a
rendere il Centro Schuster il miglior ambiente possibile in cui formarsi come
atleti e come uomini; le persone a cui sono stato legato sentimentalmente
perché, anche se il contratto era a tempo determinato, un po’ di felicità e serenità
me l’avete regalata; gli amici di Londra, Parigi e Amburgo, perché mi avete
fatto assaporare ciò che vuol dire essere in Erasmus.
A tutti voi vorrei dire GRAZIE, perché senza il vostro supporto e affetto non
sarei stato in grado di apprezzare tutte le cose belle che la vita mi ha regalato
finora e che, spero, mi regalerà in futuro. Io voglio essere il primo a godere della
mia felicità, ma poterla condividere con gli altri è di gran lunga più appagante.




















