
Rapport de thèse
60
1 L’Universit´ e de Pierre et Marie Curie et L’Universit´ e de Tunis El Manar Institut de Math´ ematiques de Jussieu et La Facult´ e des Sciences de Tunis Th` ese en cotutelle pr´ esent´ ee en vue de l’obtention du diplˆ ome de Doctorat En Math´ ematiques de : L’Universit´ e de Pierre Marie Curie L’Universit´ e de Tunis El Manar Probl` emes relatifs aux Grassmanniennes complexes Riadh JELLOUL Soutenue le 04/03/2014 devant le jury : - Ahmed FITOUHI (Pr´ esident) FST - Nizar BEN FRAJ (Rapporteur) IPEIN - Pascal CHERRIER (Examinatueur) UPMC - Julien GRIVAUX (Rapporteur) CNRS Marseille - Sami BARAKET (Encadreur) FST - Adn` ene BEN ABDESSELEM (Encadreur) UPMC
-
Upload
sorbonne-universites -
Category
Documents
-
view
3 -
download
0
Transcript of Rapport de thèse

1
L’Universite de Pierre et Marie Curie et L’Universite de Tunis El Manar
Institut de Mathematiques de Jussieu et La Faculte des Sciences de Tunis
These en cotutellepresentee en vue de l’obtention du diplome de
Doctorat En Mathematiques de :
L’Universite de Pierre Marie Curie L’Universite de
Tunis El Manar
Problemes relatifs aux
Grassmanniennes complexesRiadh JELLOUL
Soutenue le 04/03/2014 devant le jury :
- Ahmed FITOUHI (President) FST
- Nizar BEN FRAJ (Rapporteur) IPEIN
- Pascal CHERRIER (Examinatueur) UPMC
- Julien GRIVAUX (Rapporteur) CNRS Marseille
- Sami BARAKET (Encadreur) FST
- Adnene BEN ABDESSELEM (Encadreur) UPMC

2
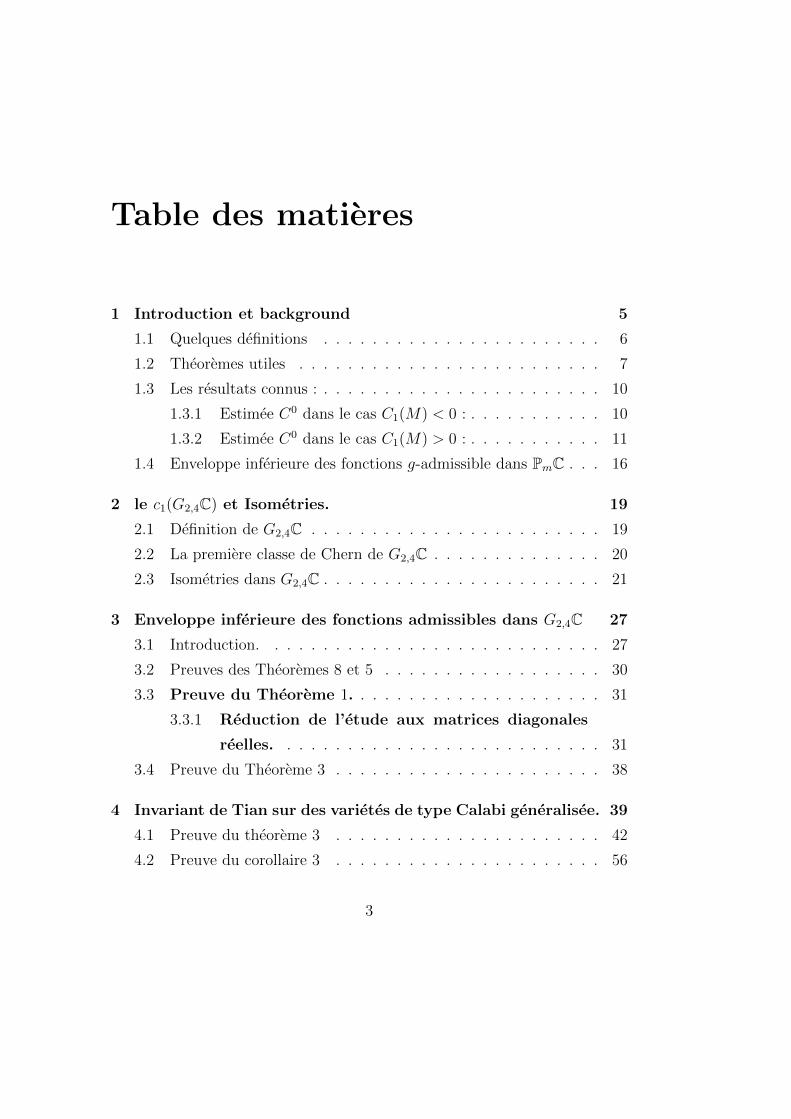
Table des matieres
1 Introduction et background 5
1.1 Quelques definitions . . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Theoremes utiles . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Les resultats connus : . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.1 Estimee C0 dans le cas C1(M) < 0 : . . . . . . . . . . . 10
1.3.2 Estimee C0 dans le cas C1(M) > 0 : . . . . . . . . . . . 11
1.4 Enveloppe inferieure des fonctions g-admissible dans PmC . . . 16
2 le c1(G2,4C) et Isometries. 19
2.1 Definition de G2,4C . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2 La premiere classe de Chern de G2,4C . . . . . . . . . . . . . . 20
2.3 Isometries dans G2,4C . . . . . . . . . . . . . . . . . . . . . . . 21
3 Enveloppe inferieure des fonctions admissibles dans G2,4C 27
3.1 Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2 Preuves des Theoremes 8 et 5 . . . . . . . . . . . . . . . . . . 30
3.3 Preuve du Theoreme 1. . . . . . . . . . . . . . . . . . . . . 31
3.3.1 Reduction de l’etude aux matrices diagonales
reelles. . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.4 Preuve du Theoreme 3 . . . . . . . . . . . . . . . . . . . . . . 38
4 Invariant de Tian sur des varietes de type Calabi generalisee. 39
4.1 Preuve du theoreme 3 . . . . . . . . . . . . . . . . . . . . . . 42
4.2 Preuve du corollaire 3 . . . . . . . . . . . . . . . . . . . . . . 56
3

4 TABLE DES MATIERES
Remerciements
Au terme de ce travail, j’adresse mes vifs remerciements a mes professeurs M.
Ben Abdesselem et M. Sami Baraket. Je leur exprime ma gratitude pour leur
aide, les conseils precieux qu’il m’ont prodigues et pour leur comprehension.
Ils m’ont ete d’un grand apport.

Chapitre 1
Introduction et background
Introduction
Cette these traite de certaines varietes Kahleriennes compactes a premiere
classe de Chern positive. A l’origine, il s’agit d’un probleme de physique
theorique. En effet, la relativite generale introduite par A. Einstein sous
l’angle metrique, apporte des explications tres longtemps recherchees sur la
gravitation. En dehors de la matiere les equations qui en decoulent s’ecrivent :
Rij = λgij;
ou Rij et gij designent respectivement les matrices des tenseurs metriques
et de Ricci. Bien que l’existence de telles metriques dans le cas Kahlerien
n’est pas exactement le cadre de la physique theorique decrit plus haut, les
derniers rebondissements mathematiques concernant la theorie des cordes
et la symetrie miroir, remettent les varietes Kahleriennes a l’ordre du jour
pour ce type de questions. Ici s’interesse au calcul de l’invariant de Tian sur
certaines varietes complexes. Signalons que le resultat de ce calcul procure
une methode pratique qui permet de mettre en evidence une metrique de
Kahler-Einstein sur une variete a premiere classe de Chern positive. Nous
traitons dans cette these deux exemples de varietes a c1 > 0, l’objet central
etant l’exemple non torique le plus simple a savoir G2,4C puis de mettre en
5

6 CHAPITRE 1. INTRODUCTION ET BACKGROUND
evidence une fonction minorant toutes les fonctions admissibles (c-a-d les
fonctions psh a une metrique dans le c1 pres a sup egal a zero et invariantes
par le groupe d’automorphismes. On montre d’abord le resultat ci-dessous
expose sur G2,4C en considerant le groupe d’automorphismes adequat nous
permettant d’obtenir des generalisations des resultats obtenus dans [5] et [6].
1.1 Quelques definitions
Soit (M, g) une variete Kahlerienne compacte. Soit ω la (1 − 1) forme sym-
plectique associee a la metrique g : ω = igλµdzλ∧dzµ et R la forme de Ricci :
R = iRλµdzλ ∧ dzµ ou Rλµ = −∂λµlog|g|, ou |g| = det(gij) .
Definition 1. Une metrique Kahlerienne est dite d’Einstein s’il existe un
reel k tel que R = kω. ou k = −1, 0, ou 1 apres normalisation. Introduisons
maintenant une notion fondamentale pour l’etude des metriques d’Einstein-
Kahler.
Definition 2. La premere classe de Chern de M, notee C1(M), est la classe
de cohomologie de R/2π. Elle est intrinseque au sens ou elle ne depend pas
de la metrique choisie.
En effet, soient g et g′ deux metriques sur M . On introduit le rapport des
formes volume φ = |ω′|/|ω|. φ est C∞ sur M et ne s’annule pas.
On a :
R′ = −i∂∂log|g′| = −i∂∂φ− i∂∂log|g| = −i∂∂φ−R
On en deduit l’egalite des classes de cohomologie : [R] = [R′] car R′−R est
exacte.
Definition 3. On dit que C1(M) > 0, (resp.C1(M) = 0, C1(M) < 0)
si C1(M) contient une (1 − 1) forme definie positive (resp.nulle, definie
negative).

1.2. THEOREMES UTILES 7
Remarquons que ces s’excluent mutuellement car toute fonction pluri-
sousharmonique sur une variete compacte est constante.
1.2 Theoremes utiles
Remarque : Si M est une variete admettant une metrique Einstein-Kahler
de facteur k, C1(M) est du signe k.
Definition 4. Une fonction ϕ ∈ C2(M) telle que ω + i∂∂ϕ > 0 est dite
admissible.
Le probleme de depart revient donc a trouver ϕ admissible telle que R′ = kω′,
ou ω′ = ω + i∂∂ϕ.
Cela signifie que l’on cherche la metrique d’Einstein-Kahler dans la meme
classe de cohomologie que la metrique initiale. dans le cas nul (k=0), on suit
le meme procede, sans condition sur la metrique initiale ω.
Definition 5. Pour toute fonction ϕ de classe C2 sur M, on pose M(ϕ) =
|ω + i∂∂ϕ|/|ω|.
Theoreme. Soit ϕ de Classe C2 sur M. On a equivalence :
(i) ϕ est admissible.
(ii) M(ϕ) > 0.
Demonstration. (i) =⇒ (ii) : en effet ω + i∂∂ϕ est une metrique.

8 CHAPITRE 1. INTRODUCTION ET BACKGROUND
(ii) =⇒ (i) : Les valeurs propres de la pseudo-metrique h’ associee a la
forme ω′ varient continument sur M et ne s’annulent pas. Il suffit donc de
montrer qu’elles sont toutes strictement positives en un point. Soit P tel
que infMϕ = ϕ(P ). On prend des coordonnees normales en P telles que la
hessienne de ϕ au point P soit diagonale, on a donc ∂λλϕ(P ) ≥ 0 pour tout
λ. Les valeurs propres de h′ en P sont les 1 + ∂λλϕ. Elles sont toutes plus
grandes que 1 donc ne s’annulent pas, on a alors la conclusion recherchee.La
metrique initiale verifie [R] = [kω]. Il existe donc une fonction f telle que
R = kω + i∂∂f.
Theoreme. ω + i∂∂ϕ est une metrique d’Einstein-Kahler de facteur k si et
seulement si il existe une constante K telle que :
(1) M(ϕ) = ef−kϕ+K
Cette equation est l’equation de Monge-Ampere associee au probleme.
Demonstration. Si ω′ est une metrique d’Einstein-Kahler, on a :
R′ = −i∂∂ logM(ϕ) + R.
L’equation R′ = kω′ se ramene a −i∂∂logM(ϕ) + R = R − i∂∂f + ki∂∂φ,
ou encore ∂∂[−logM(ϕ) − f + kϕ] = 0, soit logM(ϕ) = f − kϕ + K.
Reciproquement, si l’equation (1) est verifiee, ϕ est admissible d’apres le
theoreme 1.7. Les calculs precedents sont alors des equivalences.
Si k 6= 0, on peut toujours se ramener au cas ou K = 0 en remplacant ϕ
par ϕ+K/k. Si k = 0, on peut calculer la constante de la maniere suivante :
Theoreme. Si ϕ est une fonction admissible, et si ω′ = ω + i∂∂ϕ, alors
V ′ = V , c’est-a-dire∫MM(ϕ)dv =
∫Mdv.
Demonstration. On sait que l’element de volume d’une variete Kahlerienne

1.2. THEOREMES UTILES 9
est donne par dv = (2mm!)−1ω ∧ ... ∧ ω. Alors :
ω′ ∧ ... ∧ ω′ − ω ∧ ... ∧ ω = (ω + i∂∂ϕ) ∧ ... ∧ (ω + i∂∂ϕ)− ω ∧ ... ∧ ω.
On obtient une somme de termes de la forme ω ∧ ... ∧ ω︸ ︷︷ ︸k
∧ ∂∂ϕ ∧ ... ∧ ∂∂ϕ︸ ︷︷ ︸m−k
ou
k < m. Ils s’ecrivent [ω ∧ ... ∧ ω ∧ ∂ϕ ∧ ∂∂ϕ ∧ ... ∧ ∂∂ϕ] car dω = 0. Donc,
d’apres la formule de Stokes,∫Mω′ ∧ ... ∧ ω′ =
∫Mω ∧ ... ∧ ω, et on obtient
le resultat.
Corollaire. Dans le cas k=0, la constante verifie∫Mdv = eK
∫Mefdv, soit
encore :
K = log
∫M
dv − log∫M
efdv.
Remarquons que l’on a une expression explicite pour M(ϕ) :
Theoreme.
M(ϕ) = det(δµλ +∇µλϕ)1≤λ≤m
1≤µ≤m
Demonstation. Comme ω′ = ω+i∂∂ϕ, on a en composantes g′
λµ = gλµ+∂λµϕ.
Alors (g′g−1)λµ = g′
λδgδµ = gδµgλµ + gδµ∂λµϕ = δδλ +∇δ
λφ.
Pour m=1, on obtient M(ϕ) = 1 + ∆ϕ.
La resolution de l’equation de Monge-Ampere se fera ici par la methode
de continuite. Il faut donc decrire le comportement linearise de ϕ 7→M(ϕ).
Theoreme. Soit A2(M) l’ensemble des fonctions admissibles de classe C2
sur M. L’application :
A2(M)→ C0(M)
ϕ 7→M(ϕ)
est C1 sur l’ouvert A2(M) et on a DM(ϕ)(ψ) = M(ϕ)∆′ϕψ ou ∆
′= ∆
′ϕ

10 CHAPITRE 1. INTRODUCTION ET BACKGROUND
designe le Laplacien par rapport a la metrique ω′ = ω + i∂∂ϕ.
Demonstation. M(ϕ) = det(gλµ + ∂λµϕ)/det(gλµ).M(ϕ) est differentiable et
on a :
DM(ϕ)(ψ) = det(gλµ + ∂λµϕ)Tr(tg′λµ × ∂λµψ) = M(ϕ)Tr(g
′λµ ×t ∂λµψ)
= M(ϕ)g′λδ∂λδψ = M(ϕ)∆′ψ.
1.3 Les resultats connus :
1.3.1 Estimee C0 dans le cas C1(M) < 0 :
L’equation de Monge-Ampere associee est :
log(M(ϕ)) = f + ϕ.
On utilise comme dans le cas precedent la methode de continuite en con-
siderant la famille d’equations (Et)0≤t≤1 suivante :
(Et) log(M(ϕ)) = tf + ϕ
L’equation :
Γ : A5+α(M)→ C3+α(M)
ϕ 7→ log(M(ϕ))− ϕ
est C1de differentielle DΓϕ(ψ) = ∆′ϕψ+ψ = (∆
′ϕ−Idψ). Le spectre du Lapla-
cien etant negatif, DΓϕ(ψ) est inversible. La methode de continuite s’applique
encore. L’estimee C0 est ici beaucoup plus simple que dans le cas C1(M) = 0.

1.3. LES RESULTATS CONNUS : 11
Theoreme. Les solutions de l’equation
log(M(ϕ)) = tf + ϕ;
sont uniformement bornees sur [0, τ [. On a meme une estimation explicite :
sup|ϕ| ≤ τsup|f |.
Demonstration. Soit P un point ou ϕ atteint son maximum. On choisit des
coordonnees normales en P (gλµ = δλµ), ajustees a l’ordre 2 pour que la
hessienne complexe de ϕ en P soit diagonale (∂λµϕ = 0 si λ 6= µ). Pour tout
λ, ∂λλϕ(P ) < 0. Donc :
M(ϕ)(P ) =m∏λ=1
[1 + ∂λλϕ(P )] ≤ 1.
Alors ϕ(P ) = −tf(P ) + logM(ϕ)(P ) ≤ τsup|f |. D’ou sup(ϕ) ≤ τsup|f |. En
raisonnant de meme en un point ou ϕ est minimale, on obtient :
inf(ϕ) ≥ −τsup|f |
1.3.2 Estimee C0 dans le cas C1(M) > 0 :
Le cas C1(M) > 0 est tres different des autres. Lequation de Monge-Ampere
associee au probleme est
log(M(ϕ)) = f − ϕ.
Cette equation n’admet pas toujours de solution. En effet, deux obstructions
majeures a l’existace d’une metrique d’Einstein-Kahler sont connues :
Premiere obstruction.
Le theoreme de Lichnerowicz. Si une variete Kahlerienne a une cour-
bure scalaire constante, le groupe des automorphismes de M est reductif, i.e.

12 CHAPITRE 1. INTRODUCTION ET BACKGROUND
toute representaion lineaire est completement reductible.
Remarquons q’une metrique d’Einstein-Kahler est toujours a courbure
scalaire constante :
Rλµ = kgλµ et on a gλµRλµ = kgλµgλµ, soit R = mk.
Le theoreme de Futaki. Soit M une variete Kahlerienne compacte verifiant
la condition ω/2π ∈ C1(M) > 0. Soit f telle que R = ω + i∂∂f . Soit h(M)
l’algebre de lie des champs holomorphes sur M. On definit la fonctionnelle
de Futaki par :
F : h(M)→ C
X 7→∫M
X(f)ωmdv.
F ne depend pas du choix de la metrique ω. Donc δM = dim[h(M)/kerF ] ne
depend que de la structure complexe de M . Si M est une variete d’Einstein-
Kahler, alors δM = 0.
Le critere de Futaki est plus fort que le critere de Lichnerowicz, en ce sens
qu’il existe des varietes dont le groupe des automorphismes est reductif, et
qui verifient δM = 1.
Deuxieme obstruction. Elle provient du fait q’il est impossible d’utiliser la
methode de continuite mise en place dans le cas ou C1(M) < 0. En effet, soit :
Γ : A5+α(M)→ C3+α(M)
ϕ 7→ logM(ϕ) + ϕ
Alors dΓϕ(ψ) = ∆′ϕψ + ψ = (∆
′ϕ + Id)(ψ), et −1 peut etre dans le spectre
de ∆′ϕ, ce qui rend cette methode inutilisable.

1.3. LES RESULTATS CONNUS : 13
La Methode de continuite d’Aubin. Aubin considere la famille (Et)0≤t≤1
d’equations definies par :
(Et) : logM(ϕ) = f − tϕ.
Soit ϕ une solution de Et. On note ω′ la metrique ω + i∂∂ϕ associee. Alors
logM(ϕ) = log |g′| − log |g|. D’ou −R′+R = i∂∂f − it∂∂ϕ. Compte tenu de
R− ω = i∂∂f , on obtient R′ = (1− t)ω + tω′ En particulier, R′ ≥ tω′.
la variete etant Kahlerienne compacte, la premiere valeur propre du Laplacien
verifie −λ > t (version Kahlerienne de l’identite de Bochner-Lichnerowicz,
due a Aubin). On considere ensuite :
Γ : [0, 1]×A5+α(M)→ C3+α(M)
(t, ϕ) 7→ tϕ+ logM(ϕ).
Alors, D2Γ(t,ϕ)(ψ) = tψ + ∆′ϕψ = (∆
′ϕ + tId)ψ. L’estimee precedente montre
que −t /∈ Sp(∆′ϕ), donc D2Γ(t,ϕ) est inversible en un point (t, ϕ), t 6= 0, tel
que tϕ+ logM(ϕ) = f , c’est a dire Γ(t, ϕ) = f .
Le theoreme des fonctions implicites permet alors de resoudre cette equation
pour t′ voisin de t. Si on trouve un point (t0, ϕ0) tel que Γ(t0, ϕ0) = f , on peut
mettre en place une methode de continuite en introduisant I = {t, t ≥ t0} tel
que Et permet de trouver une solution. I est un intervalle et on pose τ = supI.
Nous allons montrer l’existence d’un element (t0, ϕ0) tel que Γ(t0, ϕ0) = f .
Soit u une forme lineaire continue sur C5+α(M) telle u(1) 6= 0. On deduit :
Γ : [0, 1]×A5+α(M)→ C3+α(M)
(t, ϕ) 7→ tϕ+ logM(ϕ) + u(ϕ).

14 CHAPITRE 1. INTRODUCTION ET BACKGROUND
Γ est C1 et D2Γt,ϕ)(ψ) = (tId + ∆′ϕ)ψ + u(ψ)dv, Donc D2Γ(0,ϕ)(ψ) =
∆′ϕψ + u(ψ). Si ∆
′ϕψ + u(ψ) = 0, par integration u(ψ) = 0, donc ∆
′ϕψ = 0.
La fonction ψ est donc constante et u(ψ) = 0, donc ψ est nulle. la sub-
jectivite de ∆′ϕ assure la subjectivite de D2Γ(0,ϕ).
Donc D2Γ(0,ϕ)(ψ) est inversible. D’autre part Γ(0, ϕ) = logM(ϕ) + u(ϕ).
L’equation de Monge-Ampere associee au cas C1(M) = 0 s’ecrit logM(ϕ) =
f pour∫Mdv. Comme on sait resoudre cette equation, il existe ϕ telle que
logM(ϕ) = f .
On peut imposer u(ϕ) = 0. On a bien alors Γ(O,ϕ) = f . Le theoreme
des fonctions implicites montre qu’il existe (t0, ϕ), avec t0 > 0 tel que
Γ(t0, ϕ) = f , c’est a dire t0ϕ+logM(ϕ)+u(ϕ) = f . On pose ϕ0 = ϕ+u(ϕ)/t0.
La fonction ϕ0 est solution de Et0 .
Nous allons maintenant introduire des fonctionnelles indispensables a l’etude
de l’estimee C0 dans le cas positif.
Les fonctionnelles I et J d’Aubin. On commence par etablir un lemme
tres utile :
Lemme. Soient ω1, ..., ωm des (1−1) formes positives sur M. Alors ω1∧...∧ωmest une mesure positive sur M.
Theoreme. Soit h : R→ R, croissante, C1 et ϕ admissible. Alors :∫M
[1−M(ϕ)]h(ϕ)dv ≥ 1
m
∫M
h′(ϕ)|∇ϕ|2dv.
Theoreme. Si ϕ est une fonction C2 admissible, on definit les fonctionnelles

1.3. LES RESULTATS CONNUS : 15
I et J par :
I(ϕ) =
∫M
[1−M(ϕ)]ϕdv =
∫M
ϕdv −∫M
ϕdv′
J(ϕ) =
∫ 1
0
I(sϕ)
sds.
Remarque. Si m = 1, on a vu que M(ϕ) = 1 + ∆ϕ. On a donc en integrant
par parties I(ϕ) =∫M|∇ϕ|2dv et I(ϕ) = 2J(ϕ).
Theoreme.m+1mJ(ϕ) ≤ I(ϕ) ≤ (m+ 1)J(ϕ).
Theoreme. Si on a une estimee uniforme pour I (ou J), alors on a l’estimee
C0.
Remarque. On peut se restreindre dans toutes les equations aux fonc-
tions admissibles invariantes par un groupe compact d’automorphismes (non
trivial). L’inariant est alors defini sur cette classe de fonctions. Il est donc
necessairement plus petit que l’invariant initial.
L’invariant de Tian.
Theoreme (Tian). Soit M une variete Kahlerienne compacte, ω ∈ 2πC1(M).
Soit α la borne superieure des α ≥ 0 pour lesquels il existe une constante
C telle que pour toute fonction admissible verifiant supϕ = 0 on ait :∫Me−αϕdv ≤ C.

16 CHAPITRE 1. INTRODUCTION ET BACKGROUND
Alors α > 0. De plus, si α > m/(m + 1), on a l’estimee C0 et M admet
une metrique d’Einstein-Kahler.
Demonstration. Elle repose sur le lemme suivant :
Lemme (Skoda, Hormander). Il existe une constante C telle que pour
toute fonction Ψ pluri-sousharmonique sur la boule unite de Cm telle que
Ψ ≤ 1 et Ψ(0) = 0
∫||z||≤1/2
e−Ψ(z)dv ≤ C.
1.4 Enveloppe inferieure des fonctions g-admissible
dans PmC
A. Ben Abdesselem a montre que les fonctions admissibles pour la metrique
de Fubini-Study sur l’espace projectif complexe PmC de dimension complexe
m, invariantes par un groupe d’automorphismes convenablement choisi,
sont minorees par une fonction tendant vers moins l’infini sur le bord
des cartes usuelles de PmC. Une minoration similaire a lieu sur certaines
varietes projectives. Cette minoration donne une constante optimale dans
une inegalite de type Hormander sur ces varietes, ce qui permet d’y etablir
l’existence de metriques d’Einstein-Kahlerienne.
On considere l’espace projectif complexe PmC de dimension complexe m =
kn−1. Si [z0, z1, .., zm] designent les coordonnees homogenes. D’autre part, on
munit PmC de la metrique g ayant pour composantes, dans la carte {z0 6= 0},
gλµ = am∂2
∂zλ∂zµ(ln(1+ | z1 |2 +..+ | zm |2)),
ou am > 0. Elle est egale a am fois la metrique de Fubini-Study et appartient
a la premiere classe de Chern C1(PmC) lorsque am = (m + 1). On dit que

1.4. ENVELOPPE INFERIEURE DES FONCTIONSG-ADMISSIBLE DANS PMC17
ϕ ∈ C∞(PmC) est g-admissible lorsque
gλµ +∂2ϕ
∂zλ∂zµ> 0.
On considere aussi le groupe d’automorphismes Gn sur PmC engendre par
les automorphismes
τk,θ : [z0, ..., zm] −→ [z0, .., zkeiθ, .., zm],
et enfin, pour zp et zq
γp,q : [z0, .., zp, .., zq, .., zm] −→ [z0, .., zq, .., zp, .., zm].
On definit sur Cm+1\⋃p{zp = 0} la fonction ψ par
ψ = ln(| z0 | ... | zm |)2am/(m+1)
(| z0 |2 +...+ | zm |2)am.
Elle est homogene de degre zero sur Cm+1, elle definit donc une fonction sur
PmC. ψ atteint son maximum (egal a −am ln(m+ 1)) en les points
[1, eiθ1 , .., eiθm ] ∈ PmC
qui definissent un produit de tores. ψ tends vers moins l’infini lorsque l’une
des coordonnees homogenes z0,.., zm tend vers zero ou vers l’infini, ce qui
correspond aux frontieres des cartes denses definies par {zh = 0}.Etablissons a present les principaux resultats :
Theoreme 1 . Soit ϕ ∈ C∞(PmC) une fonction g-admissible et Gn,k-
invariante, verifiant supϕ = 0 sur PmC. On a alors : ϕ ≥ ψ.
On a alors le corollaire suivant.
Theoreme 2 . Pour tout α < 1, on a l’inegalite de type Hormander (voir
[10] th. 4.4.5) : ∫PmC
exp{−αϕ}dv ≤ Cst,
∀ϕ ∈ C∞(PmC), g-admissible avec am = (m+ 1), Gn-invariante, et verifiant
supϕ = 0 sur PmC. dv est l’element de volume sur Pm relatif a la metrique
g.

18 CHAPITRE 1. INTRODUCTION ET BACKGROUND
L’inegalite du theoreme 5 est optimale car elle correspond a la valeur de
l’invariant de Tian (cf. [13]) relatif a cette classe de fonctions c’est un
moyen simple de calculer cet invariant en reduisant la classe de fonctions
a considerer a la fonction ψ. La methode employee s’applique a des varietes
plus compliquees que PmC. Pour cela, il suffit de mettre en evidence la
bonne fonction extremale. complexe egale a m. Pn−1C. (ici, les coordonnees
homogenes sont divisees par z0). On a le resultat suivant :
Theoreme 3 . Soit ϕ ∈ C∞(M) une fonction gM -admissible et GM -
invariante telle que supϕ = 0 sur M . On a alors ϕ ≥ ψM , et M admet
une metrique d’Einstein-Kahler dans la classe de Kahler de gM .
Ceci presente l’existence de ce type de metrique dans un cas torique de
varietes et de calculer aisement la constante de Tian, le souci de cette these
et d’etendre ce resultat dans le cas non torique plus precisement dans les
grassmanniennes complexes.

Chapitre 2
le c1(G2,4C) et Isometries.
2.1 Definition de G2,4C
(G2,4C, g) est la grassmannienne complexe des deux plans de C4 munie la
metrique g, obtenue a partir de celle de Fubini-Study sur P5C, et appartenant
a la premiere classe de Chern, c1(G2,4C).
On repere les points de G2,4C, par une matrice de M4,2(C) :
z0 z′0
z1 z′1
z2 z′2
z3 z′3
ou les deux vecteurs colonnes sont independants. Les ouverts de cartes Ui,j,
0 ≤ i < j ≤ 3 s’obtiennent en considerant le mineur d’ordre 2 relatif aux
lignes i, j a determinant non nul. Par exemple, dans U0,1, un point de la
grassmannienne s’ecrit : 1 0
0 1
z1 z2
z3 z4
,
19

20 CHAPITRE 2. LE C1(G2,4C) ET ISOMETRIES.
2.2 La premiere classe de Chern de G2,4C
La metrique s’ecrit comme suit :
gλµ = a2,4∂λµLn(K)
avec K est le potentiel de la metrique ; En effectuant un changement de carte
on obtient un potentiel
K = |Jac|2K
Ou Jac est le jacobien de changement de cartes. En effet :
Il y a deux types de changement de cartes dans G2,4C. Le premier (ou le plus
simple) est du type :
(ζ1, ζ2, ζ3, ζ4) −→ (−ζ2
ζ1
,1
ζ1
,−Dζ1
,ζ3
ζ1
),
ou D = (ζ1ζ4−ζ2ζ3). Le determinant d’un tel changement de cartes est egal a
1/ζ41 , ce qui permet de prolonger η a la nouvelle carte. Le second changement
de cartes est du type :
(ζ1, ζ2, ζ3, ζ4) −→ (−ζ4
D,ζ2
D,ζ3
D,−ζ1
D).
Son determinant (bien plus complique a calculer) est egal a 1/D4, ce qui
permet encore de prolonger l’ecriture a la nouvelle carte. En effet :
(z1, z2, z3, z4)→
1 0
z1 z2
0 1
z3 z4
1 0
z1 z2
0 1
z3 z4
(
1 0
z1 z2
)−1
=1
z2
1 0
z1 z2
0 1
z3 z4
(
z2 0
−z1 1
)=
1 0
0 1
− z1z2
1z2
z2z3−z1z4z2
z4z2
(z1, z2, z3, z4)→ (−z1
z2
,1
z2
,z2z3 − z1z4
z2
,z4
z2
)

2.3. ISOMETRIES DANS G2,4C 21
∣∣∣∣∣∣∣∣∣∣∣
− 1z2
z1z21
0 0
0 1z22
0 0
− z4z2
z1z4z22
1 − z1z2
0 − z4z22
0 1z2
∣∣∣∣∣∣∣∣∣∣∣=
1
|z2|4⇒ |Jacobienne|2 =
1
|z2|2×4
Soit le potentiel de metrique suivant :
K = (1 + |z1|2 + |z2|2 + |z3|2 + |z4|2 + |z1z4 − z2z3|2)a
en effectuant le changement de cartes definit ci-dessus nous obtenons :
K = (1 +
∣∣∣∣z1
z2
∣∣∣∣2 +
∣∣∣∣ 1
z2
∣∣∣∣2 +
∣∣∣∣z1z4 − z2z3
z2
∣∣∣∣2 +
∣∣∣∣z4
z2
∣∣∣∣2 +
∣∣∣∣z1z4
z22
+z2z3 − z1z4
z22
∣∣∣∣)ace qui donne :
K =1
|z2|2a(1 + |z1|2 + |z2|2 + |z3|2 + |z4|2 + |z1z4 − z2z3|2)a ⇒ a = 4
d’ou c1(G2,4C) > 0 pour un coefficient a2,4 = 4 on definit par la suite la
metrique :
gλµ = a2,4∂∂ ln(1 + |z1|2 + |z2|2 + |z3|2 + |z4|2 + |z1z4 − z2z3|2)
ψ = ln |z1z4−z2z3|4
( 1+|z1|2+|z2|2+|z3|2+|z4|2+|z1z4−z2z3|2 )4
2.3 Isometries dans G2,4C
L’application :
G2,4Cϕ−→ G4,2C

22 CHAPITRE 2. LE C1(G2,4C) ET ISOMETRIES.
R=
z0 z1
0
z1 z11
z2 z12
z3 z13
(a bc d
)(z0 z10z1 z11
)z2 z1
2
z3 z13
=
az0 + bz1 , az10 + bz1
1
cz0 + dz1 , cz10 + dz1
1
z2 z12
z3 z13
est bien definie.
Si on change de representation :
αz0 + βz′0 γz0 + δz′0
αz1 + βz′1 γz1 + δz′1
αz2 + βz′2 γz2 + δz′2
αz3 + βz′3 γz3 + δz′3
= R
avec
∣∣∣∣∣ α β
γ δ
∣∣∣∣∣ 6= 0 on a :
ϕ(R′) =
aαz0 + aβz′0 + bαz1 + bβz′1, aγz0 + aδz′0 + bγz1 + bδz′1
cαz0 + cβz′0 + dαz1 + dβz′1, cγz0 + cδz′0 + dγz1 + dδz′1
αz2 + βz′2 γz2 + δz′2
αz3 + βz′3 γz3 + δz′3
et de representation correspendant de ϕ(R) est :αaz0 + αbz1 + βaz′0 + βbz′1, γaz0 + γbz1 + δaz′0 + δbz′1
1
αcz0 + αdz1 + βcz′0 + βdz′1, γdz0 + γcz0 + δcz′0 + δdz′11
αz2 + βz′2 , γz2 + δz′2
αz3 + βz′3 , γz3 + δz′3
L’application ne depend donc pas du choix du representant
Par contre l’application :
G2,4Cψ−→ G2,4C

2.3. ISOMETRIES DANS G2,4C 23
avec
∣∣∣∣∣ α β
γ δ
∣∣∣∣∣ 6= 0
R=
z0 z1
0
z1 z11
z2 z12
z3 z13
−→(z0 z10z1 z11
)(a bc d
)z2 z1
2
z3 z13
=
az0 + cz10 , bz0 + dz0
az1 + cz′1 , bz1 + dz′1
z2 z′2
z3 z′3
n’est pas bien defini car depend du choix du representant.
En effet, ψ
αz0 + βz′0, γz0 + δz′0
αz1 + βz′1, γz1 + δz′1
αz2 + βz′2 , γz2 + δz′2
αz3 + βz′3 , γz3 + δz′3
avec
∣∣∣∣∣ α β
γ δ
∣∣∣∣∣ 6= 0 on a :
=
αz0 + βz′0, γz0 + δz′0
αz1 + βz′1, γz1 + δz′1
αz2 + βz′2 , γz2 + δz′2
αz3 + βz′3 , γz3 + δz′3
∣∣∣∣∣ α β
γ δ
∣∣∣∣∣
=
aαz0 + aβz′0 + cγz0 + cδz′0, bαz0 + bδz′0 + dβz0 + dδz′0
aαz1 + aβz′1 + cγz1 + cδz′1, bαz1 + bβz′1 + dγz1 + dδz′1
αz2 + βz′2 γz2 + δz′2
αz3 + βz′3 γz3 + δz′3
Calculons ϕ−1
(a bc d)
(on a clairement ϕ−1
(a bc d)
= ϕ(a bc d)
−1
et montrer que si(a bc d
)∈⋃
(2)) alors :
ϕ(a bc d)
est une isometrie (relativement metrique de Fubini-Study).

24 CHAPITRE 2. LE C1(G2,4C) ET ISOMETRIES.
Remarque : les composantes de metrique sont donnees dans le carte
∣∣∣∣∣ α β
γ δ
∣∣∣∣∣6= 0 par :
gλµ = a2,4∂∂ ln(1 + |z1|2 + |z2|2 + |z3|2 + |z4|2 + |z1z4 − z2z3|2)
ou le representant est :
1 0
0 1
z1 z2
z3 z4
L’action de U(2) a droite donne :
(
1 00 1
)(a bc d
)(z0 z1z2 z43
) −→
1 0
0 1
az1 + bz3 az2 + bz4
cz1 + dz3 cz2 + dz4
gλµ = a2,4∂∂ ln(1 + |az1 + bz3|2 + |az2 + bz4|2 + |cz1 + dz2|2 + |cz2 + dz1|2
+
∣∣∣∣∣ a b
c d
∣∣∣∣∣2 ∣∣∣∣∣ z1 z2
z3 z4
∣∣∣∣∣2
)
0n a
(a b
c d
) (a b
c d
)=
(1 0
0 1
)=
(a b
c d
) (a b
c d
)
−→{|a|2|b|2=|c|2+|d|2=1
ac+bd=0
et
{|a|2|c|2=|b|2+|d|2=1
ab+cd=0

2.3. ISOMETRIES DANS G2,4C 25
Or (1) |az1 + bz3|2 = (az1 + bz3)(az1 + bz3)
= |a|2|z1|2 + abz1z3 + baz3z1 + |b|2|z3|2
(2) |az2 + bz4|2 = (|a|2|z2|2 + abz2)(z4 + baz4z2) + |b|2|z4|2
(3) (|cz1 + bz3|2 = (|c|2|z1|2 + cdz1)(z3 + dcz1z3) + |b|2|z3|2
Enfin (4) |cz2 + dz4|2 = (|c|2|z2|2 + cdz2z4 + cdz2z4 + |d|2|z4|
⇒ (1) + (2) + (3) + (4) = |z1|2 + |z2|2 + |z3|2 + |z4|2
d’ou l’invariance par l’action de ϕ
P
z0 z′0
z1 z′1
z2 z′2
z3 z′3
=
z2 z′2
z3 z′3
z0 z′0
z1 z′1
est elle intrinseque.
P−1 = P
P
az0 + bz′0 cz0 + cz′0
az1 + bz′1 cz1 + cz′1
az2 + bz′2 cz2 + cz′2
az3 + bz′3 cz3 + cz′3
=
az2 + bz′2 cz0 + cz′0
az3 + bz′3 cz3 + cz′3
az0 + bz′0 cz0 + cz′0
az1 + bz′1 cz1 + cz′1
qui represente le par
∣∣∣∣∣ a b
c d
∣∣∣∣∣ 6= 0 le meme plan que :z2 z′2
z3 z′3
z0 z′0
z1 z′1
Elle est donc bien definie.

26 CHAPITRE 2. LE C1(G2,4C) ET ISOMETRIES.
d’autre part, la aussi il s’agit bien d’une isometrie car les determinants des
inverses d’ordre deux de
z0 z′0
z1 z′1
z2 z′2
z3 z′3
sont les meme que ceux de
z2 z′2
z3 z′3
z0 z′0
z1 z′1
, et
dans l’ecriture local
1 0
0 1
z1 z2
z0 z4
qui devient dans l’intersection des deux cartes
∣∣∣∣∣ z0 z′0
z1 z′1
∣∣∣∣∣ 6= 0 et
∣∣∣∣∣ z2 z′2
z3 z′3
∣∣∣∣∣ 6= 0
L’ecriture
1 0
0 1
z1 z2
z3 z4
dans la 1ere carte qui devient :
z4
z1z4−z2z3 − z2z1z4−z2z3
− z3z1z4−z2z3
z1z1z4−z2z3
1 0
0 1
dans la 2eme carte
La metrique devient
gλµ = a2,4∂∂ ln 1|z1z4−z2z3|2 (1 + |z1|2 + |z2|2 + |z3|2 + |z4|2 + |z1z4 − z2z3|2)
p est donc une isometrie.

Chapitre 3
Enveloppe inferieure des
fonctions admissibles dans G2,4C
3.1 Introduction.
Soit (G2,4C, g), la grassmannienne complexe des deux plans de C4 munie la
metrique g, obtenue a partir de celle de Fubini-Study sur P5C, et appartenant
a la premiere classe de Chern, c1(G2,4C).
On repere les points de G2,4C, par une matrice de M4,2(C) :z0 z′0
z1 z′1
z2 z′2
z3 z′3
ou les deux vecteurs colonnes sont independants. Les ouverts de cartes Ui,j,
0 ≤ i < j ≤ 3 s’obtiennent en considerant le mineur d’ordre 2 relatif aux
lignes i, j a determinant non nul. Par exemple, dans U0,1, un point de la
grassmannienne s’ecrit : 1 0
0 1
z1 z2
z3 z4
,
27

28CHAPITRE 3. ENVELOPPE INFERIEURE DES FONCTIONS ADMISSIBLES DANSG2,4C
et la metrique g a pour composantes dans cette carte :
gλµ = 4∂λµ ln(1+ | z1 |2 + | z2 |2 + | z3 |2 + | z4 |2 + | z1z4 − z2z3 |2)
(la constante 4 est celle qui assure que la metrique est bien dans le c1, voir
[16]), ou ∂λµ = ∂2
∂zλ∂zµ.
On dit qu’une fonction ϕ ∈ C∞(G2,4C) est g-admissible, si gλµ + ∂λµϕ est
definie positive (elle definit donc une nouvelle metrique).
Soit maintenant la fonction ψ, definie dans U0,1 ∩ U2,3 par :
ψ
z0 z′0
z1 z′1
z2 z′2
z3 z′3
= ln| z0z
′1 − z′0z1 |4| z2z
′3 − z′2z3 |4
(∑
0≤i<j≤3 | ziz′j − z′izj |2)4.
Cette fonction, de huit variables complexes, est independante du choix du
representant du plan de C4, elle definit par consequent une fonction sur G2,4C(prive du bord des cartes).
Son expression dans la carte U0,1 est :
ψ
(z1 z2
z3 z4
)= ln
| z1z4 − z2z3 |4
(1+ | z1 |2 + | z2 |2 + | z3 |2 + | z4 |2 + | z1z′4 − z′2z3 |2)4.
On pose ψ = ψ − sup ψ = ψ + 4 ln 4. ψ est negative et admet un sup nul en
le point
(1 0
0 1
)de la carte U0,1 (voir proposition 7).
Enfin, considerons le groupe G, engendre par les automorphismes φ a b
c d
et P de G2,4C, definis, pour
(a b
c d
)∈ U2(C), par :
φ a b
c d
z0 z′0
z1 z′1
z2 z′2
z3 z′3
=
az0 + bz1 az′0 + bz′1
cz0 + dz1 cz′0 + dz′1
z2 z′2
z3 z′3

3.1. INTRODUCTION. 29
et
P
z0 z′0
z1 z′1
z2 z′2
z3 z′3
=
z2 z′2
z3 z′3
z0 z′0
z1 z′1
.
L’invariance d’une fonction f par P se traduit dans l’intersection des cartes
U0,1 ∩ U2,3 par le fait que f(M) = f(M−1) pour tout M ∈ GL(2,C).
On verifie aisement que ces applications sont intrinseques et laissent invari-
ante la metrique g. G est par consequent un groupe d’isometries de G2,4C,
au sens de la metrique g. On verifie aussi que la fonction ψ, definie plus haut
est G-invariante.
Dans cet article on montre que les fonctions ϕ ∈ C∞(G2,4C), g-admissibles,
a sup egal a zero sur G2,4C, invariantes par G, sont minorees par la fonction
ψ (que l’on appellera desormais ”fonction extremale”), fonction tendant vers
moins l’infini sur le bord des cartes usuelles (decrites plus haut) de G2,4C.
Une minoration similaire a ete prouvee sur le projectif complexe ainsi que sur
des varietes obtenues a partir de ce dernier par eclatements et par fibration,
minoration qui fournit une inegalite de type Tian sur ces varietes toriques,
et permet d’etablir des minorations de leurs tenseurs de Ricci.
Le present article traite d’un exemple non-torique, utilisant une autre
methode que celle preconisee dans [16], y adjuvant un groupe d’automor-
phismes permettant de trouver une constante de Tian plus grande. Enoncons
a present les principaux resultats de cet article.
Theoreme 4 Soit ϕ ∈ C∞(G2,4C) une fonction g-admissible et G-invariante,
verifiant supG2,4C ϕ = ϕ
1 0
0 1
1 0
0 1
= 0. Alors on a : ϕ ≥ ψ.

30CHAPITRE 3. ENVELOPPE INFERIEURE DES FONCTIONS ADMISSIBLES DANSG2,4C
Theoreme 5 Soit ϕ ∈ C∞(G2,4C) une fonction g-admissible et G-invariante,
verifiant supG2,4C ϕ = 0. Alors on a : ϕ ≥ ψ.
Un corollaire de ce theoreme est le :
Theoreme 6 . Pour tout α < 1/2, on a l’inegalite de type Tian suivante
(voir [13] : ∫G2,4C
exp(−αϕ)dv ≤ Cst,
pour toute fonction ϕ verifiant les hypoteses du theoreme 8.
dv est l’element de volume sur G2,4C relatif a la metrique g.
3.2 Preuves des Theoremes 8 et 5
Tous les calculs qui vont suivre s’effectuent dans l’intersection des cartes
U0,1 et U2,3. L’ecriture des fonctions dans l’une des deux cartes sont donc
des fonctions d’une matrice de M2(C) inversible, ϕ(M) = ϕ
(z1 z2
z3 z4
). En
ecriture locale, l’invariance de ϕ par G se traduit de la maniere suivante :
ϕ(M) = ϕ(M−1) et ϕ(MU) = ϕ(M), ∀U ∈ U2(C), ∀M ∈ GL(2,C).
En effet, si ϕ est G-invariante, on a :
ϕ(M) = ϕ
(Id
M
)= ϕ
(M
Id
)= ϕ
(M ×M−1
Id×M−1
)= ϕ
(Id
M−1
)= ϕ(M−1),
et
ϕ(M) = ϕ
(Id
M
)= ϕ
(M
Id
)= ϕ
(M × UId
)= ϕ
(Id
M × U
)= ϕ(MU),

3.3. PREUVE DU THEOREME 1. 31
3.3 Preuve du Theoreme 1.
3.3.1 Reduction de l’etude aux matrices diagonales
reelles.
Les invariances par G nous permettent de reduire l’etude aux seules matrices
diagonales reelles :
Lemme 1 Soit ϕ une fonction invariante par G. Alors, pour tout M ∈GL(2,C) on a :
ϕ(M) = ϕ(D)
ou D est la matrice diagonale associee a la matrice hermitienne H donnee
par la decomposition M = HU de M en produit d’une matrice unitaire U par
d’une matrice hermitienne H.
Preuve.
Soit M ∈ GL(2,C). On a M = HU , ou U ∈ U2(C) et H hermitienne. Par
consequent, sachant que ϕ est G-invariante, on a ϕ(M) = ϕ(H). D’autre
part, H etant hermitienne, ses valeurs propres sont reelles (ici non nulles
car M est inversible), on a donc : H = P−1DP ou P ∈ U2(C) et D est
une matrice diagonale reelle. Or, et encore par G-invariance de ϕ, l’egalite
ϕ(MU) = ϕ(M) pour U ∈ U2(C) donne aussi ϕ(UM) = ϕ(M). En effet,
ϕ(UM) = ϕ((M−1U−1)−1) = ϕ(M−1U−1) = ϕ(M−1) = ϕ(M).
Par consequent, la multiplication, aussi bien a droite qu’a gauche, par une
matrice unitaire laisse invariant la fonction ϕ.
On a donc :
ϕ(M) = ϕ(H) = ϕ(P−1DP ) = ϕ(D).
Proposition 7 ψ est G-invariante et atteint son sup, egal a zero, sur U2
(ce qui revient a dire que ψ atteint son sup, egal a −4 ln(4), sur U2). ψ et ψ
verifient :
∂λµψ = ∂λµψ = −gλµ

32CHAPITRE 3. ENVELOPPE INFERIEURE DES FONCTIONS ADMISSIBLES DANSG2,4C
Preuve.
Les fonctions ψ et ψ sont clairement G-invariantes et on a : ∂λµψ = ∂λµψ =
−gλµ, car ∂2(ln|z|2)∂z∂z
= 0.
Montrons que supψ est atteint sur U2. Pour ce faire Il suffit de chercher les
extrema de
f(z1, z2, z3, z4, z5) =| z5 |4
(1+ | z1 |2 + | z2 |2 + | z3 |2 + | z4 |2 + | z5 |2)4,
sous la contrainte : z5 = z1z4 − z2z3. En un point critique, on a le systeme
donne par les cinq equations :
∂f∂z1
(z1, z2, z3, z4, z5) = −4|z5|2z1D5 = λz4
∂f∂z2
(z1, z2, z3, z4, z5) = −4|z5|2z2D5 = −λz3
∂f∂z3
(z1, z2, z3, z4, z5) = −4|z5|2z3D5 = −λz2
∂f∂z4
(z1, z2, z3, z4, z5) = −4|z5|2z4D5 = λz1
∂f∂z5
(z1, z2, z3, z4, z5) = z5|z5|2(2D−4|z5|2)D5 = −λ,
ou λ est un multiplicateur de Lagrange et
D = (1+ | z1 |2 + | z2 |2 + | z3 |2 + | z4 |2 + | z5 |2).
En remplacant dans les quatre permieres equations, λ par sa valeur (donnee
par la derniere equation), on a :
(1) 4z1|z5|2 = z5z4(2D − 4|z5|2)
(2) 4z2|z5|2 = −z5z3(2D − 4|z5|2)
(3) 4z3|z5|2 = −z5z2(2D − 4|z5|2)
(4) 4z4|z5|2 = z5z1|(2D − 4|z5|2),
ce qui permet d’ores et deja d’affirmer que
|z1|2 = |z4|2 et |z2|2 = |z3|2.
D’autre part, (1)z1 + (2)z2 + (3)z3 + (4)z4 donne |z5|2 = 1, et en multipliant :
(1)z4 + (4)z1 par sa conjuguee on a :
64|z1|2|z4|2 = (|z1|2 + |z4|2)2(2D − 4)2.

3.3. PREUVE DU THEOREME 1. 33
Sachant que |z1|2 = |z4|2 et que |z5|2 = 1, il vient :
|z1|2 + |z2|2 = 1. Une preuve similaire donne |z3|2 + |z4|2 = 1.
Et en utilisant |z2|2 = |z3|2, le meme calcul donne :
|z1|2 + |z3|2 = 1 et |z2|2 + |z4|2 = 1.
Par consequent, en remplacant (2D − 4|z5|2) par 4, le systeme d’equation
plus haut devient :
(1) z1 = z5z4
(2) z2 = −z5z3
(3) z3 = −z5z2
(4) z4 = z5z1,
ce qui donne :
z1z3 + z2z4 = 0 et z1z2 + z3z4 = 0.
En conclusion, la matrice M =
(z1 z2
z3 z4
)verifie M × M t = M t×M = Id.
Lemme 2 Soit λ 6= 1 un reel strictement positif et soit ϕ une fonction
verifiant les hypotheses du theoreme 8. Alors :
(ϕ− ψ)
(1 0
0 λ
)≥ 0
et
(ϕ− ψ)
(λ 0
0 1
)≥ 0.
(ecriture dans la carte U0,1).
Preuve.
Procedons par l’absurde en supposant qu’il existe λ > 0, λ 6= 1 tel que :
(ϕ− ψ)
(1 0
0 λ
)< 0

34CHAPITRE 3. ENVELOPPE INFERIEURE DES FONCTIONS ADMISSIBLES DANSG2,4C
(meme preuve pour
(λ 0
0 1
)).
Soit l’ensemble defini pour λ > 1 par :
Dλ =⋃
t∈[−1,1]
{⋃
θ∈[−0,2π]
(1 0
0 λteiθ
)}.
Dλ est, par construction homeomorphe a la couronne
{z ∈ C tel que1
λ<| z |< λ} ⊂ C,
(pour λ < 1, on definit Dλ de la meme maniere, en inversant les inegalites :
λ <| z |< 1λ).
D’autre part, la fonction (ϕ− ψ) est constante sur chaque cercle :
Ct =⋃
θ∈[−0,2π]
(1 0
0 λteiθ
).
En effet,(1 0
0 λteiθ
)=
(1 0
0 λt
)(1 0
0 eiθ
)et
(1 0
0 eiθ
)∈ U2(C).
Par consequent, en utilisant le fait que ϕ− ψ est G-invariante, on a :
(ϕ−ψ)
(1 0
0 λteiθ
)= (ϕ−ψ)(
(1 0
0 λt
)(1 0
0 eiθ
)) = (ϕ−ψ)
(1 0
0 λt
).
Sachant que ϕ−ψ est G-invariante, elle l’est en particulier par l’inversion des
matrices (expression dans U0,1 ∪ U2,3 de l’invariance des automorphismes P
decrits plus haut). La fonction ϕ− ψ prend donc la meme valeur sur Ct que
sur C−t. Elle est donc negative sur le bord C−1 ∪ C1 de la couronne precitee
et identiquement nulle sur le cercle C0 (les fonctions ϕ et ψ sont nulles sur le
cercle C0 correspondant a l’orbite de la matrice identite). Elle atteint donc
son sup a l’interieur de la couronne que l’on parametrisera, dans la carte U0,1,
par la courbe holomorphe :
c(z) = (c1(z) = 1, c2(z) = 0, c3(z) = 0, c4(z) = z)

3.3. PREUVE DU THEOREME 1. 35
En un point z0 interieur a la couronne ou le sup est atteint, on a :
∂2[(ϕ− ψ)(c(z))]
∂z∂z(z0) =
∂2(ϕ− ψ)
∂zi∂zj(c(z0))ci(z0) ˙cj(z0) < 0,
ce qui contredit l’hypothese d’admissibilite de ϕ.
Lemme 3 Soient λ1 et λ2 deux reels strictement positifs et differents de 1,
et soit ϕ une fonction verifiant les hypotheses du theoreme 8. Alors on a :
(ϕ− ψ)
(λ1 0
0 λ2
)≥ 0
(ecriture dans la carte U0,1).
Preuve. Comme dans le lemme precedent, on raisonnera par l’absurde en
supposant qu’il existe 0 < λ1 et 0 < λ2 tous deux differents de 1, tels que
(ϕ− ψ)
(λ1 0
0 λ2
)< 0.
Remarquons que l’invariance de (ϕ− ψ) par U2(C) implique :
(ϕ− ψ)
(λt1 0
0 λt2
)= (ϕ− ψ)
(λt1e
iθ1 0
0 λt2eiθ2
).
et
(ϕ− ψ)
(λt1 0
0 λt2
)= (ϕ− ψ)
(λt1e
iθ1 0
0 λt2eiθ2
).
et
(ϕ− ψ)
(λt1 0
0 λt2
)= (ϕ− ψ)
(λt1e
iθ1 0
0 λt2eiθ2
).
C est un domaine complexe de dimension complexe 2 de la carte U0,1 dont
le bord est donne par les orbites de
M =
(λ1 0
0 λ2
)et M−1 =
(1/λ1 0
0 1/λ2
)

36CHAPITRE 3. ENVELOPPE INFERIEURE DES FONCTIONS ADMISSIBLES DANSG2,4C
par l’action de A ⊂ U2(C). En effet, l’ensemble decrit par MtU , lorsque U
decrit A, est l’ensemble des matrices(ζ1 0
0 ζ2
)avec
1
λ1
< |ζ1| < λ1 et1
λ2
< |ζ2| < λ2.
On peut donc reperer les points de C par (ζ1, ζ2), ou 1λ1
< |ζ1| < λ1 et1λ2< |ζ2| < λ2. C decrit par consequent un produit de tores dont le bord est
donne par :
∂C = {(ζ1, ζ2) ∈ C2; ζ1 = λ1 ou1
λ1
, et ζ2 = λ2 ou1
λ2
},
ou la fonction (ϕ−ψ) est strictement negative, d’apres l’hypothese de depart
et le fait que (ϕ−ψ) est G-invariante. En effet, a l’instar du lemme precedent,
l’invariance d’une fonction par G se traduit par le fait que cette fonction
demeure constante sur Et ∪ E−t.Par consequent (ϕ − ψ) admet un maximum a l’interieur du domaine C de
C2, que l’on parametrisera dans U0,1 ∩ U2,3 par :
c(ζ1, ζ2) = (c1(ζ1, ζ2), c2(ζ1, ζ2), c3(ζ1, ζ2), c4(ζ1, ζ2)).
La hessienne est par consequent negative en un point interieur au domaine
C parametrise par (ζ01 , ζ
02 ). On a donc :
∂2[(ϕ− ψ)(c(ζ1, ζ2))]
∂ζ i∂ζj(ζ0
1 , ζ02 ) =
∂2(ϕ− ψ)
∂zi∂zj(c(z0))ci(z0) ˙cj(z0) < 0.
Ceci contredit l’admissibilite de ϕ.
Preuve du Theoreme 1. Soit ϕ une fonction verifiant les hypotheses du
theoreme 8. D’apres les lemmes 2 et 3, ϕ ≥ ψ en tout point M de la carte
U0,1 verifiant detM 6= 0. En effet, comme nous l’avons precise plus haut en
utilisant les invariances de ϕ et ψ (c.f lemme1), l’etude se ramene aux seules
matrices diagonales reelles. Il reste donc a considerer les points M ∈ U0,1 tels
que detM = 0. Or en ces points la fonction ψ ≡ −∞, donc inferieure a ϕ.

3.3. PREUVE DU THEOREME 1. 37
Preuve du Theoreme 2.
Commencons par le cas ou ϕ atteint son sup sur U(2) (dans la carte U0,1).
D’apres le theoreme 1, on a ϕ ≥ ψ et par consequent ϕ ≥ ψ. Il ne nous reste
donc plus qu’a etudier le cas ou ϕ atteint son sup sur M /∈ U(2).
Pour ce faire, on introduit les fonctions definies dans U0,1 ∩ U2,3 par :
ψ1
z0 z′0
z1 z′1
z2 z′2
z3 z′3
= ln| z0z
′1 − z′0z1 |8
(∑
0≤i<j≤3 | ziz′j − z′izj |2)4,
dont l’expression dans la carte U0,1 est :
ψ1
(z1 z2
z3 z4
)= ln
1
(1+ | z1 |2 + | z2 |2 + | z3 |2 + | z4 |2 + | z1z′4 − z′2z3 |2)4.
et
ψ2
z0 z′0
z1 z′1
z2 z′2
z3 z′3
= ln| z2z
′3 − z′2z3 |8
(∑
0≤i<j≤3 | ziz′j − z′izj |2)4,
dont l’expression dans la carte U0,1 est :
ψ2
(z1 z2
z3 z4
)= ln
| z1z4 − z2z3 |8
(1+ | z1 |2 + | z2 |2 + | z3 |2 + | z4 |2 + | z1z′4 − z′2z3 |2)4.
Ces deux fonctions de huit variables complexes sont independantes du choix
des representants du plan de C4, elles definissent par consequent des fonctions
sur G2,4C (prive du bord des cartes).
On remarque que sur U(2), on a : ψ1 = ψ2 = ψ.
Supposons qu’il existe un point M ∈ U0,1 , M /∈ U2, tel que :
(ϕ− ψ)(M) < 0.

38CHAPITRE 3. ENVELOPPE INFERIEURE DES FONCTIONS ADMISSIBLES DANSG2,4C
3.4 Preuve du Theoreme 3
. D’apres le theoreme precedent on a :∫G2,4C
e−αϕdv ≤∫
G2,4C
e−αψdv
Si |g| designe le determinant de la metrique,
log(1 + |z1|2 + |z2|2 + |z3|2 + |z4|2 + |z1z4 − z2z3|2)4|g|
est alors une quantite intrinseque. En effet, ceci est du au fait que
gλµ = ∂λµ log(1 + |z1|2 + |z2|2 + |z3|2 + |z4|2 + |z1z4 − z2z3|2)4.
Il existe donc deux constantes C1 et C2 telles que :
C1 ≤ log(1 + |z1|2 + |z2|2 + |z3|2 + |z4|2 + |z1z4 − z2z3|2)4|g| ≤ C2.
La convergence de la derniere integrale est donc equivalente a la convergence
de : ∫C4
e−αψdz1 ∧ dz1 ∧ dz2 ∧ dz2 ∧ dz3 ∧ dz3 ∧ dz4 ∧ dz4
log(1 + |z1|2 + |z2|2 + |z3|2 + |z4|2 + |z1z4 − z2z3|2)4,
et compte tenu des invariances par G des fonctions considerees, cela revient
a etudier la convergence de :∫ +∞
0
∫ +∞
0
(uv)−2αdudv
(1 + u+ v + uv)4(1−α)
qui a lieu des que α < 1/2.

Chapitre 4
Invariant de Tian sur des
varietes de type Calabi
generalisee.
Rappelons dans un premier temps la definition des espaces, metriques, et
groupes d’automorphismes que l’on considerera. Ces espaces generalisent
ceux introduits dans [7]. Designons par [z0, z1, .., zm] les coordonnees ho-
mogenes de l’espace projectif complexe PmC de dimension complexe m ≥ 2.
Munissons PmC de la metrique g ayant pour composantes, dans la carte
{z0 6= 0},gλµ = (m+ 1)∂λµ ln(1 + x1 + ..+ xm)
ou xi =| zi |2 et ∂λµ = ∂2
∂zλ∂zµ.
Fixons 0 < p ≤ m, ainsi que les entiers nj, j ∈ {1, ..., p}, reperant les points
de PmC de la maniere suivante :
[Z1, ..., Zp] = [z0, .., zn1−1; zn1 , .., zn1+n2−1; ...; zn1+...+np−1 , .., zn1+...+np−1 = zm],
ou Zk est le nk-uplet : Zk = (zn1+...+nk−1, .., zn1+...+nk−1) ∈ Cnk .
M est l’eclate de PmC au dessus des sous-ensembles
{[0[n1]; ..; 0[nk−1]; zn1+...+nk−1, .., zn1+...+nk−1; 0[k+1]; ....; 0[p]]},
39

40CHAPITRE 4. INVARIANT DE TIAN SUR DES VARIETES DE TYPE CALABI GENERALISEE.
(ou 0[nk] = (0, 0, .., 0) ∈ Cnk) qui s’identifient aux espaces Pn1−1C,..,Pnp−1C.
M est la sous-variete de PmC× Pn1−1C× ...× Pnp−1C constituee des points
([Z1, ..., Zp], [ζ0, .., ζn1−1], .., [ζn1+...+np−1 , .., ζn1+...+np−1 = ζm]) ∈ PmC×Pn1−1C...×Pnp−1C
tels que les vecteurs (ζn1+...+nk−1, .., ζn1+...+nk−1) et Zk soient proportionnels.
On considere les projections π0, π1,..,πp de M respectivement sur PmC,
Pn1−1C,.., Pnp−1C. Designant par gk la metrique de Fubini-Study sur Pnk−1C,
on montre que
g = pπ∗0gm + (n1 − 1)π∗1g1 + ...+ (np − 1)π∗pgp
est une metrique sur M qui a pour composantes
gλµ = p∂λµ ln(1 + x1 + ..+ xm) + (n1 − 1)∂λµ ln(1 + x1 + ..+ xn1−1) + ...+
(np − 1)∂λµ ln(xn1+...+np−1 + ..+ xm)
dans la carte dense de M :
{([1, z1, .., zm], [1, z1, .., zn1−1], .., [zn1+...+np−1 , .., zm]), (z1, .., zm) ∈ Cm et
(zn1+...+nk−1, .., zn1+...+nk−1) 6= 0}
g est dans la premiere classe de Chern de M (voir [7]) ; et par consequent,
M est de Fano.
On considere le groupe d’automorphismes G sur PmC engendre par les auto-
morphismes σik,sk , τl,θ definies ∀ ik, sk ∈ {n1 + ...+nk−1, .., n1 + ...+nk− 1},l ∈ {0, 1, ..,m} et θ ∈ [0, 2π] par
σik,sk([z0, ..; zn1+...+nk−1, .., zik , .., zsk , .., zn1+...+nk−1; .., zm]) =
[z0, ..; zn1+...+nk−1, .., zsk , .., zik , .., zn1+...+nk−1; .., zm]
et
τl,θ([z0, .., zl, .., zm]) = [z0, .., zleiθ, .., zm].

41
Ce groupe engendre des groupes d’automorphismes naturels de M que l’on
notera encore G.
On definit sur Cm+1\⋃p{zp = 0} la fonction ψ = inf(ψ1, .., ψp), ou
ψk = ln(| zn1+...+nk−1
| ... | zn1+...+nk−1 |)2(m+1)/nk
(| z0 |2 +...+ | zm |2)(m+1).
Les ψk sont homogenes de degre zero sur Cm+1, chacune d’entre elles induit
alors une fonction sur PmC. La fonction ψk atteint son maximum egal a
−(m + 1) ln(nk) en les points [0, .., 0; eiθn1+...+nk−1 , .., eiθn1+...+nk−1 ; 0, .., 0] ∈PmC et tend vers moins l’infini lorsque l’une des coordonnees homogenes
zn1+...+nk−1, .., zn1+...+nk−1 tend vers zero ou vers l’infini, ce qui correspond
aux frontieres des cartes denses definies par
{zi 6= 0, n1 + ...+ nk−1 ≤ i ≤ n1 + ...+ nk − 1}.
Pour decrire la fonction extremale ψ sur M , on considere les fonctions ψk
ψk = ln{(| z(0)
n1+...+nk−1| ... | z(0)
n1+...+nk−1 |)2pnk
(| z(0)0 |2 +...+ | z(0)
m |2)p×
p∏i=1
(| z(i)0 | ... | z
(i)ni−1 |)
2(ni−1)
ni
(| z(i)0 |2 +...+ | z(i)
ni−1 |2)ni−1}.
Les ψk sont des fonctions definies sur
(Cm+1\⋃i
{z(0)i = 0})× (Cn1\
⋃j
{z(1)j = 0})× ...× (Cnp\
⋃j
{z(p)j = 0})
ou (z(0)i )0≤i≤m, (z
(1)i )0≤i≤n1−1,..., (z
(p)i )0≤i≤np−1 sont respectivement les coor-
donnees sur Cm+1, Cn1 ,.., Cnp . Elles sont separement homogenes de degre
zero en les variables de Cm+1, Cn1 ,.., Cnp . Elles definissent des fonctions sur
PmC×Pn1−1C× ...×Pnp−1C, et par consequent sur M , et ce, en considerant
leurs restriction a M . On pose alors ψ = inf(ψ1, .., ψp) Etablissons les princi-
paux resultats de ce chapitre :
Theoreme 8 Soit ϕ ∈ C∞(PmC) une fonction g-admissible et G-invariante,
verifiant supϕ = 0 sur PmC. On a alors ϕ ≥ ψ.
On en deduit le corollaire suivant.

42CHAPITRE 4. INVARIANT DE TIAN SUR DES VARIETES DE TYPE CALABI GENERALISEE.
Corollaire 1 Pour tout α < inf1≤k≤p(nkm+1
), on a l’inegalite de type Hormander
suivante (voir [10]) : ∫PmC
exp(−αϕ)dv ≤ Cst,
pour toute fonction ϕ ∈ C∞(PmC), g-admissible, G-invariante, verifiant
supϕ = 0 sur PmC. dv est l’element de volume sur Pm relatif a la metrique
g.
Theoreme 9 Soit ϕ ∈ C∞(M) une fonction g-admissible et G-invariante,
verifiant supϕ = 0 sur M . On a alors ϕ ≥ ψ.
Corollaire 2 Pour tout α < 1/p, on a l’inegalite∫M
exp(−αϕ)dv ≤ Cst,
pour toute fonction ϕ ∈ C∞(M), g-admissible, G-invariante, verifiant
supϕ = 0 sur M . dv est l’element de volume sur M relatif a la metrique
g.
4.1 Preuve du theoreme 3
. Comme pour l’espace X, l’invariance par le groupe d’automorphismes
G, des fonctions ϕ([z0, .., zk, zk+1, .., zm], [ζ0, .., ζk], [ζ′k+1, .., ζ
′m]) (ou (z0, .., zk)
et (ζ0, .., ζk) ainsi que (zk+1, .., zm) et (ζ ′k+1, .., ζ′m) sont colineaires), nous
permettra de les considerer, dans le lemme ci-dessus comme des fonctions
ϕ([1, x1, ..., xm], [1, x1, ..., xk], [xk+1, ..., xm]) des variables reelles xi =| zi |> 0,
i ∈ {1, ..,m}, puis, dans le lemme qui le suit comme des fonctions
ϕ([x0, ..., xk, 1, xk+2, .., xm], [x0, ..., xk], [1, xk+2, ..., xm])
des variables reelles xi =| zi |> 0.

4.1. PREUVE DU THEOREME 3 43
Lemme 4 Etant donnee une fonction ϕ ∈ C∞(Y ), g-admissible, G-invariante.
Si xi =| zi |> 0 pour tout i :
(ϕ− ψ)([1, x1, .., xm], [1, x1, .., xk], [xk+1, .., xm])
≥ (ϕ− ψ)([1, x1, .., xk; ζ[m−k]], [1, x1, .., xm], [1[m−k]]), (4.1.1)
ou ζ [m−k] = (ζ, .., ζ) ∈ Cm−k et ζ = (xk+1...xm)1/(m−k).
Preuve. A l’instar du lemme precedent, nous procederons par recurrence.
Supposons que pour k+1 ≤ p < m et pour tout (x1, .., xm) ∈ Rm avec xi > 0
on ait
(ϕ− ψ)([1, x1, .., xm], [1, x1, .., xk], [xk+1, .., xm]) ≥
(ϕ− ψ)([1, x1, .., xk; (xk+1...xp)1
p−k , .., (xk+1...xp)1
p−k , xp+1, ..xm],
[1, x1, .., xk], [(xk+1...xp)1
p−k , .., (xk+1...xp)1
p−k , xp+1, ..xm]). (4.1.2)
Cette propriete est claire pour p = k + 1. Si l’inegalite (4.1.2) n’etait pas
satisfaite au rang p + 1, il existerait alors un point (x01, .., x
0m) ∈ Rm avec
x0i > 0 pour tout i, tel que
(ϕ− ψ)([1, x01, .., x
0m], [1, x0
1, .., x0k], [x
0k+1, .., x
0m]) <
(ϕ− ψ)([1, x01, .., x
0k; (x0
k+1...x0p+1)
1p+1−k , .., (x0
k+1...x0p+1)
1p+1−k , x0
p+2, .., x0m],
[1, x01, .., x
0k], [(x
0k+1...x
0p+1)
1p+1−k , .., (x0
k+1...x0p+1)
1p+1−k , x0
p+2, .., x0m]). (4.1.3)
En utilisant la continuite de (ϕ− ψ), on peut supposer, quitte a en modifier
legerement les coordonnees, que le point
([1, x01, .., x
0m], [1, x0
1, .., x0k], [x
0k+1, .., x
0m])
de l’inegalite (4.1.3), verifie
(x01..x
0k)
1/(k+1) 6= (x0k+1..x
0m)1/(m−k).
En utilisant la G-invariance de ϕ, on peut supposer que x0k+1 ≤ ... ≤ x0
m.
D’autre part, en tenant encore compte de la G invariance de ϕ et de

44CHAPITRE 4. INVARIANT DE TIAN SUR DES VARIETES DE TYPE CALABI GENERALISEE.
l’hypothese de recurrence (4.1.2) en les points
([1, x01, .., x
0k;x
0k+1, x
0k+2, .., x
0p, x
0p+1, x
0p+2, .., x
0m],
[1, x01, .., x
0k], [x
0k+1, x
0k+2, .., x
0p, x
0p+1, x
0p+2, .., x
0m])
et
([1, x01, .., x
0k;x
0k+2, x
0k+3, .., x
0p, x
0p+1, x
0k+1, x
0p+2, .., x
0m],
[1, x01, .., x
0k], [x
0k+2, x
0k+3, .., x
0p, x
0p+1, x
0k+1, x
0p+2, .., x
0m]),
de Y , on peut ecrire
(ϕ− ψ)([1, x01, .., x
0m], [1, x0
1, .., x0k], [x
0k+1, .., x
0m]) ≥
(ϕ− ψ)([1, x01, .., x
0k; (x0
k+1...x0p)
1p−k , .., (x0
k+1...x0p)
1p−k , x0
p+1, x0p+2, .., x
0m],
[1, x01, .., x
0k], [(x
0k+1...x
0p)
1p−k , .., (x0
k+1...x0p)
1p−k , x0
p+1, x0p+2, .., x
0m]) (4.1.4)
et
(ϕ− ψ)([1, x01, .., x
0k;x
0k+2, .., x
0p+1, x
0k+1, x
0p+2, .., x
0m], [1, x0
1, .., x0k],
[x0k+2, .., x
0p+1, x
0k+1, x
0p+2, .., x
0m]) ≥
(ϕ− ψ)([1, x01, .., x
0k; (x0
k+2..x0p+1)
1p−k , .., (x0
k+2..x0p+1)
1p−k , x0
k+1, x0p+2, .., x
0m],
[1, x01, .., x
0k], [(x
0k+2..x
0p+1)
1p−k , .., (x0
k+2..x0p+1)
1p−k , x0
k+1, x0p+2, .., x
0m]). (4.1.5)
Considerons maintenant la courbe C d’equation
tp−kx = x0k+1...x
0p+1
dans le plan reel
{[1, x01, .., x
0k; t, .., t, x, x
0p+2, .., x
0m], [1, x0
1, .., x0k], [t, .., t, x, x
0p+2, .., x
0m]}
parametre par les variables t et x. Les points
P1 = ([1, x01, .., x
0k; (x0
k+1...x0p)
1p−k , .., (x0
k+1...x0p)
1p−k , x0
p+1, x0p+2, .., x
0m],
[1, x01, .., x
0k], [(x
0k+1...x
0p)
1p−k , .., (x0
k+1...x0p)
1p−k , x0
p+1, x0p+2, .., x
0m])

4.1. PREUVE DU THEOREME 3 45
et
P2 = ([1, x01, .., x
0k; (x0
k+2...x0p+1)
1p−k , .., (x0
k+2...x0p+1)
1p−k , x0
k+1, x0p+2, .., x
0m],
[1, x01, .., x
0k], [(x
0k+2...x
0p+1)
1p−k , .., (x0
k+2...x0p+1)
1p−k , x0
k+1, x0p+2, .., x
0m])
appartiennent a la courbe C. Notons que les reels x0i pour k + 1 ≤ i ≤ p+ 1
ne sont pas tous egaux, sinon (4.1.3) deviendrait une egalite.
Par suite, sachant que l’on a choisi x0k+1 ≤ ... ≤ x0
p+1, les points distincts P1
et P2 se trouvent strictement de part et d’autre de la diagonale t = x du plan
precedent.
Or la courbe C coupe cette diagonale en le point
P3 = ([1, x01, .., x
0k; (x0
k+1...x0p+1)
1p+1−k , .., (x0
k+1...x0p+1)
1p+1−k , x0
p+2, .., x0m],
[1, x01, .., x
0k], [(x
0k+1...x
0p+1)
1p+1−k , .., (x0
k+1...x0p+1)
1p+1−k , x0
p+2, .., x0m])
qui intervient dans l’inegalite (4.1.3). D’autre part, en utilisant les relations
(4.1.3), (4.1.4) et (4.1.5) on obtient :
(ϕ− ψ)(P3) > (ϕ− ψ)(P1) et (ϕ− ψ)(P3) > (ϕ− ψ)(P2),
ce qui prouve que la fonction (ϕ− ψ) admet un maximum local sur la courbe
C. En consequence, la restriction de la fonction G-invariante (ϕ − ψ) a la
courbe holomorphe (toujours notee C) d’equation ξp−kz = x0k+1...x
0p+1 du
plan complexe
{([1, x01, .., x
0k; ξ, .., ξ, z, x
0p+2, .., x
0m], [1, x0
1, .., x0k])}
atteint un maximum local en un point P = C(ζ). Posons
C(ζ) = ([1, C1(ζ), .., Cm(ζ)], [1, C1(ζ), .., Ck(ζ)], [Ck+1(ζ), .., Cm(ζ)]),
Cλ(ξ) =dCλ
dξ(ξ) et Cµ(ξ) = Cµ(ξ).
Sachant que l’on a choisi le point ([1, x01, .., x
0m], [1, x0
1, .., x0k], [x
0k+1, .., x
0m]) de
sorte que
(x01...x
0k)
1/(k+1) 6= (x0k+1...x
0m)1/(m−k),
46CHAPITRE 4. INVARIANT DE TIAN SUR DES VARIETES DE TYPE CALABI GENERALISEE.
l’equation de la courbe C et les definitions de ψ1 et ψ2 montrent qu’en tout
point de C
ψ1([1, x01, .., x
0k; ξ, .., ξ, z, x
0p+2, .., x
0m], [1, x0
1, .., x0k]) 6=
ψ2([1, x01, .., x
0k; ξ, .., ξ, z, x
0p+2, .., x
0m], [1, x0
1, .., x0k]). (4.1.6)
On peut alors supposer que ψ = ψ1 dans un voisinage de P , la preuve etant
identique si l’on suppose ψ = ψ2 dans ce voisinage. On a donc :
∂2
∂ξ∂ξ{(ϕ− ψ1)(C(ζ))} =
∂2(ϕ− ψ1)
∂zλ∂zµ(C(ζ))Cλ(ζ)Cµ(ζ)
est negatif ou nul. Comme − ∂2ψ1
∂zλ∂zµ= gλµ, ceci exprime que la forme
hermitienne de matrice :
(gλµ +∂2ϕ
∂zλ∂zµ)λ,µ = (
∂2(ϕ− ψ1)
∂zλ∂zµ)λ,µ
est negative en P = C(ζ). On en deduit une contradiction avec la g-
admissibilite de ϕ en P . D’ou l’inegalite (4.1.2) au rang p + 1 et, par
consequent, le lemme 4.
Lemme 5 Etant donnee une fonction ϕ ∈ C∞(Y ), g-admissible, G-invariante.
Si xi =| zi |> 0 pour tout i, on a :
(ϕ− ψ)([x0, x1, .., xk; 1, xk+2, .., xm], [x0, x1, .., xk], [1, xk+2, .., xm]) ≥
(ϕ− ψ)([η, η, .., η; 1, xk+2, .., xm], [1[k+1]], [1, xk+2, .., xm]),(4.1.7)
ou η = (x0x1...xk)1/(k+1).
Preuve. Comme dans le lemme 4, la preuve s’effectue par recurrence.
Supposons que pour 0 ≤ p < k et pour tout (x0, .., xk;xk+2, .., xm) ∈ Rm
avec xi > 0, on ait
(ϕ− ψ)([x0, .., xk, 1, xk+2, .., xm], [x0, .., xk], [1, xk+2, .., xm]) ≥
(ϕ− ψ)([(x0...xp)1p+1 , .., (x0...xp)
1p+1 , xp+1, .., xk; 1, xp+2, .., xm],
[(x0...xp)1p+1 , .., (x0...xp)
1p+1 , xp+1, .., xk], [1, xp+2, .., xm]). (4.1.8)

4.1. PREUVE DU THEOREME 3 47
Cette hypothese est verifiee pour p = 0. Si l’inegalite (4.1.8) n’etait pas
satisfaite au rang p + 1, il existerait un point (x00, .., xk;xk+2, .., x
0m) ∈ Rm
avec x0i > 0 pour tout i, tel que :
(ϕ− ψ)([x00, .., x
0k; 1, x0
k+2, .., x0m], [x0
0, .., x0k], [1, x
0k+2, .., x
0m]) <
(ϕ− ψ)([(x00..x
0p+1)
1p+2 , .., (x0
0..x0p+1)
1p+2 , x0
p+2, ..., x0k; 1, x0
k+2, .., x0m],
[(x00..x
0p+1)
1p+2 , .., (x0
0..x0p+1)
1p+2 , x0
p+2, ..., x0k], [1, x
0k+2, .., x
0m]). (4.1.9)
Comme au lemme 4, on peut supposer que le point
([x00, .., x
0k; 1, x0
k+2, .., x0m], [x0
0, .., x0k], [1, x
0k+2, .., x
0m]) ∈ Y
verifie
(x00..x
0k)
1/(k+1) 6= (x0k+2..x
0m)1/(m−k),
et que x00 ≤ ... ≤ x0
p+1. D’autre part, en tenant compte de la G-invariance de
ϕ et de l’hypothese de recurrence (4.1.8) en les points
([x00, x
01, .., x
0p, x
0p+1, .., x
0k; 1, x0
k+2, .., x0m], [x0
0, x01, .., x
0p, x
0p+1, .., x
0k], [1, x
0k+2, .., x
0m])
et
([x01, .., x
0p+1, x
00, .., x
0k; 1, x0
k+2, .., x0m], [x0
1, .., x0p+1, x
00, .., x
0k], [1, x
0k+2, .., x
0m]),
on a
(ϕ− ψ)([x00, .., x
0k; 1, x0
k+2, .., x0m], [x0
0, .., x0k], [1, x
0k+2, .., x
0m]) ≥
(ϕ− ψ)([(x00..x
0p)
1p+1 , .., (x0
0..x0p)
1p+1 , x0
p+1, .., x0k; 1, x0
k+2, .., x0m],
[(x00..x
0p)
1p+1 , .., (x0
0..x0p)
1p+1 , x0
p+1, .., x0k], [1, x
0k+2, .., x
0m]) (4.1.10)
et
(ϕ− ψ)([x01, .., x
0p+1, x
00, .., x
0k; 1, x0
k+2, .., x0m],
[x01, .., x
0p+1, x
00, .., x
0k], [1, x
0k+2, .., x
0m]) ≥
(ϕ− ψ)([(x01..x
0p+1)
1p+1 , .., (x0
1..x0p+1)
1p+1 , x0
0, x0p+2, .., x
0k; 1, x0
k+2, .., x0m],
[(x01..x
0p+1)
1p+1 , .., (x0
1..x0p+1)
1p+1 , x0
0, x0p+2, .., x
0k], [1, x
0k+2, .., x
0m]). (4.1.11)

48CHAPITRE 4. INVARIANT DE TIAN SUR DES VARIETES DE TYPE CALABI GENERALISEE.
Considerons maintenant la courbe C d’equation
tp+1x = x00...x
0p+1
du plan reel
{([t, .., t, x, x0p+2, .., x
0k; 1, x0
k+2, .., x0m], [t, .., t, x, x0
p+2, .., x0k], [1, x
0k+2, .., x
0m])}
parametre par les variables t et x. Les points
Q1 = ([(x00..x
0p)
1p+1 , .., (x0
0..x0p)
1p+1 , x0
p+1, x0p+2, .., x
0k; 1, x0
k+2, .., x0m],
[(x00..x
0p)
1p+1 , .., (x0
0..x0p)
1p+1 , x0
p+1, x0p+2, .., x
0k], [1, x
0k+2, .., x
0m])
et
Q2 = ([(x01..x
0p+1)
1p+1 , .., (x0
1..x0p+1)
1p+1 , x0
0, x0p+2, .., x
0k; 1, x0
k+2, .., x0m],
[(x01..x
0p+1)
1p+1 , .., (x0
1..x0p+1)
1p+1 , x0
0, x0p+2, .., x
0k], [1, x
0k+2, .., x
0m])
appartiennent a la courbe C.
D’autre part les reels x0i pour 0 ≤ i ≤ p + 1 ne sont pas tous egaux, sinon
(4.1.9) serait une egalite.
Par suite, sachant que l’on a choisi x00 ≤ ... ≤ x0
p+1, les points distincts Q1 et
Q2 se trouvent strictement de part et d’autre de la diagonale t = x du plan
precedent.
Or la courbe C coupe cette diagonale en le point
Q3 = ([(x00...x
0p+1)
1p+2 , .., (x0
0...x0p+1)
1p+2 , x0
p+2, .., x0k; 1, x0
k+2, .., x0m],
[(x00...x
0p+1)
1p+2 , .., (x0
0...x0p+1)
1p+2 , x0
p+2, .., x0k], [1, x
0k+2, .., x
0m])
qui intervient dans l’inegalite (4.1.9). D’autre part, les relation (4.1.9),
(4.1.10) et (4.1.11) donnent
(ϕ− ψ)(Q3) > (ϕ− ψ)(Q1) et (ϕ− ψ)(Q3) > (ϕ− ψ)(Q2),

4.1. PREUVE DU THEOREME 3 49
ce qui prouve que la fonction (ϕ− ψ) admet un maximum local sur la courbe
C.
Sachant que l’on a choisi le point
([x00, .., x
0k; 1, x0
k+2, .., x0m], [x0
0, .., x0k], [1, x
0k+2, .., x
0m])
de sorte que
(x00..x
0k)
1/(k+1) 6= (x0k+2..x
0m)1/(m−k),
on conclut de la meme maniere qu’au lemme precedent en considerant la
restriction de (ϕ− ψ) a une courbe holomorphe convenable.
A l’instar du lemme ??, les lemmes 4 et 5 permettent d’etablir le
Lemme 6 Etant donnee une fonction ϕ ∈ C∞(Y ), g-admissible, G-invariante,
avec xi =| zi |> 0 pour tout i, on a :
(ϕ− ψ)([1, x1, .., xk;xk+1, xk+2, .., xm], [1, x1, .., xk], [xk+1, xk+2, .., xm])
≥ (ϕ− ψ)([1[k+1]; ν [m−k]], [1[k+1]], [1[m−k]]), (4.1.12)
ou ν = (xk+1...xm)1/(m−k)
(x1...xk)1/(k+1) .
Montrons maintenant le
Lemme 7 Etant donnee une fonction ϕ ∈ C∞(Y ), g-admissible, G-invariante,
pour tout ζ > 0, on a :
(ϕ− ψ)([1[k+1]; ζ [m−k]], [1[k+1]], [1[m−k]]) ≥ 0, (4.1.13)
Preuve. On raisonne sur la position du point R0 ∈ PmC ou ϕ atteint son
maximum. En vertu de la G-invariance de ϕ, on peut supposer qu’il s’ecrit
sous la forme
R0 = ([y00, .., y
0k; y
0k+1, .., y
0m], [ρ0
0, .., ρ0k], [%
0k+1, .., %
0m]),
ou les y0i , ρ
0i , %
0i sont des reels positifs verifiant y0
0 ≥ y01 ≥ .. ≥ y0
k,
y0k+1 ≥ y0
k+2 ≥ .. ≥ y0m, ρ0
0 ≥ .. ≥ ρ0k et %0
k+1 ≥ .. ≥ %0m et ou (ρ0
0, .., ρ0k)
et (y00, .., y
0k) sont paralleles, ainsi que (%0
k+1, .., %0m) et (y0
k+1, .., y0m). Trois cas

50CHAPITRE 4. INVARIANT DE TIAN SUR DES VARIETES DE TYPE CALABI GENERALISEE.
se presentent : ou bien l’un des y00, .., y
0k et l’un des y0
k, .., y0m sont non nuls,
ou bien tous les y00, .., y
0k sont nuls, ou bien enfin tous les y0
k, .., y0m. Ces deux
derniers casetant symetriques, ils se traitent de maniere similaire.
Cas A : l’un des y00, .., y
0k et l’un des y0
k, .., y0m sont non nuls. On se place alors
dans la carte de Y decrite par les points
([z0, .., zk, zk+1, .., zm], [ξ0, .., ξk], [ξk+1, .., ξm]) ∈ PmC× PkC× Pm−k−1C
tels que z0 6= 0, ξ0 6= 0. Ceci permet de reperer R0 par
R0 = ([1, x01, .., x
0k;x
0k+1, .., x
0m], [1, x0
1, .., x0k], [x
0k+1, .., x
0m]),
ou les reels positifs x0i verifient : 1 ≥ x0
1 ≥ .. ≥ x0k et x0
k+1 ≥ ... ≥ x0m.
Raisonnons par l’absurde, et supposons qu’il existe un point
R1 = ([1[k+1]; ζ[m−k]0 ], [1[k+1]], [1[m−k]])
tel que l’on ait ζ0 > 0 et
(ϕ− ψ)(R1) < 0. (4.1.14)
On envisage alors les deux sous-cas suivants : x0k+1 < ζ0 puis x0
k+1 ≥ ζ0.
– x0k+1 < ζ0.
On introduit alors la fonction auxiliaire
ψ0 = log| z0 |4| ξ0 |2k| ξk+1 |2(m−k−1)
(| z0 |2 +...+ | zm |2)2(| ξ0 |2 +...+ | ξk |2)k(| ξk+1 |2 +...+ | ξm |2)m−k−1.
D’une part, puisque ϕ ≤ 0,
(ϕ− ψ0)([1, 0[m]], [1, 0[k]], [1, 0[m−k−1]]) = ϕ([1, 0[m]], [1, 0[k]], [1, 0[m−k−1]]) ≤ 0.
(4.1.15)
De plus, sachant que ϕ(R0) = 0 et ψ0 ≤ 0, on a
(ϕ− ψ0)(R0) ≥ 0. (4.1.16)
Si R0 6= ([1, 0[m]], [1, 0[k]], [1, 0[m−k−1]]), ψ0(R0) < 0 et l’inegalite (4.1.16) est
alors stricte. Si R0 = ([1, 0[m]], [1, 0[k]], [1, 0[m−k−1]]), quitte a se placer en un
point R arbitrairement voisin de R0, on peut supposer (ϕ − ψ0)(R) > 0.

4.1. PREUVE DU THEOREME 3 51
En effet, si dans un voisinage de R0 on avait (ϕ − ψ0) ≤ 0, comme
(ϕ − ψ0)(R0) = 0, (ϕ − ψ0) admettrait alors un maximun local en R0, ce
qui mettrait en defaut l’admissibilite de ϕ en ce point, sachant que
∂λµ(ϕ− ψ0)(R0) = (gλµ + ∂λµϕ)(R0).
Dans tous les cas, on peut donc affirmer qu’il existe un point
R′0 = ([1, a1, .., am], [1, a1, .., ak], [ak+1, .., am])
verifiant
(ϕ− ψ0)(R′0) > 0. (4.1.17)
Par continuite et G-invariance de ϕ, on peut supposer 1 > a1 > ... > ak > 0
et ζ0 > ak+1 > ... > am > 0. D’autre part, l’inegalite (4.1.14) jointe aux
definitions de R1, ψ0, ψ1 et ψ = inf(ψ1, ψ2) implique
(ϕ− ψ0)(R1) = (ϕ− ψ1)(R1) ≤ (ϕ− ψ)(R1) < 0. (4.1.18)
La courbe :
[0, 1] 3 t→ ([1, t, t(ln a2)/(ln a1), .., t(ln ak)/(ln a1); ζ0tln(ak+1/ζ0)
ln a1 , .., ζ0tln(am/ζ0)
ln a1 ],
[1, t, t(ln a2)/(ln a1), .., t(ln ak)/(ln a1)], [1, tln(ak+2/ak+1)
ln a1 , .., tln(am/ak+1)
ln a1 ])
passe par ([1, 0[m]], [1, 0[k]], [1, 0[m−k−1]]) en t = 0 puis par R′0 en t = a1 et
enfin par le point R1 en t = 1, valeurs en lesquelles, d’apres (4.1.15), (4.1.17)
et (4.1.18), (ϕ − ψ0) est respectivement negative, positive puis a nouveau
negative. L’invariance de cette fonction par l’action des exp(iθ), permet donc
de deduire que (ϕ − ψ0) atteint un maximum sur la courbe holomorphe,
complexifiee de la courbe decrite plus haut, ce qui contredit encore une fois
l’admissibilite de ϕ.
– x0k+1 ≥ ζ0.
Designons dans ce cas par p ∈ {1, ..,m− k} l’entier pour lequel on a
x0k+1 ≥ ... ≥ x0
k+p > ζ0 et ζ0 ≥ x0k+p+1 ≥ ... ≥ x0
m,

52CHAPITRE 4. INVARIANT DE TIAN SUR DES VARIETES DE TYPE CALABI GENERALISEE.
et considerons la fonction auxiliaire
ψk+1 = log| zk+1 |4| ξ0 |2k| ξk+1 |2(m−k−1)
(| z0 |2 +...+ | zm |2)2(| ξ0 |2 +...+ | ξk |2)k(| ξk+1 |2 +...+ | ξm |2)m−k−1.
On a
(ϕ− ψk+1)(R0) > 0. (4.1.19)
La fonction (ϕ − ψk+1) etant continue, quitte a se placer en un point voisin
de R0, on peut supposer tous les x0i non nuls. Posons alors :
α2 =lnx0
2
lnx01
, .., αk =lnx0
k
lnx01
;αk+1 =ln(x0
k+1/ζ0)
lnx01
, .., αm =ln(x0
m/ζ0)
lnx01
.
Sachant que l’on a 1 ≥ x01 ≥ .. ≥ x0
k ; x0k+1 ≥ .. ≥ x0
k+p ≥ ζ0 et
ζ0 ≥ x0k+p+1 ≥ .. ≥ x0
m, on en deduit que α2, .., αk ≥ 0, αk+1 ≤ ... ≤ αp+k ≤ 0
et αp+k+1, .., αm ≥ 0, d’ou, en notant
Rε = ([1, ε, εα2 , .., εαk ; ζ0εαk+1 , .., ζ0ε
αm ], [1, ε, εα2 , .., εαk ], [εαk+1 , .., εαm ]),
on a
limε→0
ψk+1(Rε) = limε→0{ln ζ4
0ε4αk+1
[1 + ε2 + ε2α2 + ..+ ε2αk + ζ20 (ε2αk+1 + ..+ ε2αm)]2
× ε2(m−k−1)αk+1
(ε2αk+1 + ..+ ε2αm)m−k−1}
= ln limt→∞
t−2αk+1(m+1−k)
(t−2αk+1 + t−2αk+2 + ..+ t−2αp)(m+1−k)= ln 1 = 0,
−αk+1 etant la plus grande puissance intervenant au denominateur. Sachant
que ϕ([Rε]) ≤ 0 et compte tenu de (4.1.19) il existe ε0 tel que l’on ait
(ϕ− ψk+1)(Rε0) ≤ −ψk+1(Rε0) < (ϕ− ψk+1)(R0). (4.1.20)
D’autre part, l’inegalite (4.1.14), jointe aux definitions de R1, ψk+1, ψ2 et
ψ = inf(ψ1, ψ2) donne :
(ϕ− ψk+1)(R1) = (ϕ− ψ2)(R1) ≤ (ϕ− ψ)(R1) < 0. (4.1.21)

4.1. PREUVE DU THEOREME 3 53
La courbe
[ε0, 1] 3 t→ ([1, t, tα2 , .., tαk , ζ0tαk+1 , .., ζ0t
αm ], [1, t, tα2 , .., tαk ], [tαk+1 , .., tαm ]),
passe par Rε0 en t = ε0 puis par R0 en t = x01 et enfin par R1 en t = 1, ce qui,
en vertu de (4.1.20), (4.1.19) et (4.1.21) prouve l’existence d’un maximum
local pour la fonction (ϕ − ψk+1) sur la courbe precitee. Ceci contredit, a
l’instar du cas precedent, l’hypothese d’admissibilite de la fonction ϕ.
Cas B : y00 = ... = y0
k = 0. On peut alors se placer dans la carte de Y decrite
par les points
([z0, .., zk; zk+1, .., zm], [ξ0, .., ξk], [ξk+1, .., ξm]) ∈ PmC× PkC× Pm−k−1C
tels que zk+1 6= 0 et ξ0 6= 0, de sorte que le point R0 ou ϕ atteint son
maximum egal a zero puisse s’ecrire sous la forme
R0 = ([0, 0, .., 0; 1, x0k+2, .., x
0m], [1, u0
1, .., u0k], [1, x
0k+2, .., x
0m]).
On peut aussi supposer, en utilisant la G-invariance de ϕ, que 1 ≥ x0k+2 ≥
.. ≥ x0m et 1 ≥ u0
1 ≥ .. ≥ u0k. On montrera une version equivalente du lemme
7, a savoir que
(ϕ− ψ)([ζ [k+1]; 1[m−k]], [1[k+1]], [1[m−k]]) ≥ 0 (4.1.22)
pour tout ζ > 0.
Raisonnons par l’absurde, et supposons qu’il existe un point
Rk+1 = ([ζ[k+1]0 ; 1[m−k]], [1[k+1]], [1[m−k]])
de Y tel que l’on ait ζ0 > 0 et
(ϕ− ψ)(Rk+1) < 0. (4.1.23)
On considere alors la fonction auxiliaire ψk+1. Sachant que ϕ ≤ 0, on a
(ϕ− ψk+1)([0[k+1]; 1, 0, .., 0], [1, 0[k]], [1, 0[m−k−1]]) =
ϕ([0[k+1]; 1, 0, .., 0], [1, 0[k]], [1, 0[m−k−1]]) ≤ 0. (4.1.24)

54CHAPITRE 4. INVARIANT DE TIAN SUR DES VARIETES DE TYPE CALABI GENERALISEE.
D’autre part, sachant que ϕ(R0) = 0 et ψk+1 ≤ 0, on a
(ϕ− ψk+1)(R0) = −ψk+1(R0) ≥ 0, (4.1.25)
inegalite stricte des que
R0 6= ([0[k+1]; 1, 0, .., 0], [1, 0[k]], [1, 0[m−k−1]]).
Si R0 = ([0[k+1]; 1, 0, .., 0], [1, 0[k]], [1, 0[m−k−1]]), quitte a se placer en un point
arbitrairement voisin de R0, on peut supposer la derniere inegalite stricte.
En effet, si dans un voisinage de R0, on avait ϕ − ψk+1 ≤ 0, alors ϕ − ψk+1
admettrait un maximum local en R0, ce qui contredirait l’admissibilite de ϕ
en R0. A l’instar du cas A, il existe donc un point
R′0 = ([c0, .., ck; 1, ck+2, .., cm], [c0, .., ck], [1, ck+2, .., cm])
verifiant
(ϕ− ψk+1)(R′0) > 0. (4.1.26)
Par continuite et G-invariance de ϕ, on peut supposer ζ0 > c0 > ... > ck > 0
et 1 > ck+2 > ... > cm > 0. D’autre part, l’inegalite (4.1.23) jointe aux
definitions de Rk+1, ψk+1, ψ2 et ψ = inf(ψ1, ψ2) implique
(ϕ− ψk+1)(Rk+1) = (ϕ− ψ2)(Rk+1) ≤ (ϕ− ψ)(Rk+1) < 0. (4.1.27)
La courbe de Y :
[0, 1] 3 t→ ([ζ0tln(c0/ζ0)ln ck+2 , .., ζ0t
ln(ck/ζ0)
ln ck+2 ; 1, t, t(ln ck+3)/(ln ck+2), .., t(ln cm)/(ln ck+2)],
[1, tln(c1/c0)ln ck+2 , .., t
ln(ck/c0)
ln ck+2 ], [1, t, t(ln ck+3)/(ln ck+2), .., t(ln cm)/(ln ck+2)])
passe par ([0[k+1], 1, 0, .., 0], [1, 0[k]]) en t = 0 puis par R0 en t = ck+2 et
enfin par le point Rk+1 en t = 1, valeurs en lesquelles, d’apres (4.1.24),
(4.1.26) et (4.1.27), (ϕ − ψk+1) est respectivement negative, positive puis
negative. L’invariance de cette fonction par l’action des exp(iθ), permet donc
de deduire que (ϕ − ψ0) atteint un maximum sur la courbe holomorphe,

4.1. PREUVE DU THEOREME 3 55
deduite de la courbe decrite plus haut, ce qui contredit l’admissibilite de ϕ,
d’ou (4.1.22).
Cas C : Les y00, .., y
0k sont tous nuls. On peut alors se placer dans la carte de
Y decrite par les points
([z0, .., zk; zk+1, .., zm], [ξ0, .., ξk], [ξk+1, .., ξm]) ∈ PmC× PkC× Pm−k−1C
tels que z0 6= 0 et ξk+1 6= 0, de sorte que le point R0 ou ϕ atteint son
maximum egal a zero puisse s’ecrire sous la forme
R0 = ([1, x01, .., x
0k; 0, 0, .., 0], [1, x0
1, .., x0k], [1, u
0k+2, .., u
0m]).
On peut aussi supposer, en utilisant la G-invariance de ϕ, que 1 ≥ x01 ≥ .. ≥
x0k et 1 ≥ u0
k+2 ≥ .. ≥ u0m.
Raisonnons par l’absurde, et supposons qu’il existe un point que l’on notera
encore
Rk+1 = ([1[k+1]; ζ[m−k]0 ], [1[k+1]], [1[m−k]])
de Y tel que l’on ait ζ0 > 0 et
(ϕ− ψ)(Rk+1) < 0. (4.1.28)
On considere alors la fonction auxiliaire ψ0 definie plus haut. Sachant que
ϕ ≤ 0, on a
(ϕ− ψ0)([1, 0, .., 0; 0[m−k]], [1, 0[k]], [1, 0[m−k−1]]) =
ϕ([1, 0[k]; 0[m−k]], [1, 0[k]], [1, 0[m−k−1]]) ≤ 0. (4.1.29)
D’autre part, sachant que ϕ(R0) = 0 et ψk+1 ≤ 0, on a
(ϕ− ψ0)(R0) = −ψk+1(R0) ≥ 0, (4.1.30)
inegalite stricte des que
R0 6= ([1, 0[k]; 0[m−k]], [1, 0[k]], [1, 0[m−k−1]]).
Si ([1, 0[k]; 0[m−k]], [1, 0[k]], [1, 0[m−k−1]]), quitte a se placer en un point arbi-
trairement voisin de R0, on peut supposer la derniere inegalite stricte. En

56CHAPITRE 4. INVARIANT DE TIAN SUR DES VARIETES DE TYPE CALABI GENERALISEE.
effet, si dans un voisinage de R0, on avait ϕ − ψk+1 ≤ 0, alors ϕ − ψk+1
admettrait un maximum local en R0, ce qui contredirait l’admissibilite de ϕ
en R0. Il existe donc un point
R′0 = ([1, c1, .., ck; ck+1, .., cm], [1, c1, .., ck], [ck+1, .., cm])
verifiant
(ϕ− ψ0)(R′0) > 0. (4.1.31)
Par continuite et G-invariance de ϕ, on peut supposer ζ0 > ck+1 > ... >
cm > 0 et 1 > c1 > ... > ck > 0. D’autre part, l’inegalite (4.1.28) jointe aux
definitions de Rk+1, ψ0, ψ1 et ψ = inf(ψ1, ψ2) implique
(ϕ− ψ0)(Rk+1) = (ϕ− ψ1)(Rk+1) ≤ (ϕ− ψ)(Rk+1) < 0. (4.1.32)
La courbe de Y :
[0, 1] 3 t→ ([1, t, t(ln c2)/(ln c1), .., t(ln ck)/(ln c1); ζ0tln(ck+1/ζ0)
ln c1 , .., ζ0tln(cm/ζ0)
ln c1 ],
[1, t, t(ln c2)/(ln c1), .., t(ln ck)/(ln c1)], [1, tln(ck+2/ck+1)
ln c1 , .., tln(cm/ck+1)
ln c1 ])
passe par ([1, 0, .., 0], [1, 0[k]], [1, 0[m−k]]) en t = 0 puis par R0 en t = c1 et
enfin par le point Rk+1 en t = 1, valeurs en lesquelles, d’apres (4.1.29),
(4.1.31) et (4.1.32), (ϕ − ψk+1) est respectivement negative, positive puis
negative. L’invariance de cette fonction par l’action des exp(iθ), permet donc
de deduire que (ϕ − ψ0) atteint un maximum sur la courbe holomorphe,
deduite de la courbe decrite plus haut, ce qui contredit l’admissibilite de ϕ,
d’ou et le lemme 7.
4.2 Preuve du corollaire 3
.
Soit ϕ ∈ C∞(Y ) une fonction g-admissible et G-invariante, dont le sup sur
Y est nul. D’apres le theoreme 9, on a ϕ ≥ ψ et par suite, pour tout α ≥ 0,∫Y
exp(−αϕ)dv ≤∫Y
exp(−αψ)dv.

4.2. PREUVE DU COROLLAIRE 3 57
Afin d’obtenir les valeurs de α pour lesquelles cette derniere integrale
converge, on estimera∫Y
exp(−αψ1)dv et∫Y
exp(−αψ2)dv dans la carte dense
correspondant a la parametrisation
([1, z1, .., zm], [1, z1, .., zk], [zk+1, .., zm]).
Dans cette carte, l’element de volume est donne par (c.f. [7]) :
dv = det((gλµ))dz1 ∧ dz1 ∧ ... ∧ dzm ∧ dzm,
ou
det((gλµ)) = 2(−1)m[(k + 2)(1+ | z1 |2 +...+ | zk |2) + k(| zk+1 |2 +...+ | zm |2)]k
(1+ | z1 |2 +...+ | zk |2)k(| zk+1 |2 +...+ | zm |2)m−k−1
× [(m− k − 1)(1+ | z1 |2 +...+ | zk |2) + (m− k + 1)(| zk+1 |2 +...+ | zm |2)]m−k−1
(1+ | z1 |2 +...+ | zm |2)m+1.
Si up =| zp |2, en zero et en l’infini on a l’equivalence :
dv ∼ Cst(> 0)
(1 + u1 + ..+ uk)k(uk+1 + ..+ um)m−k−1(1 + u1 + ..+ um)2.
La convergence de∫Y
exp(−αψ1)dv est donc equivalente a celle de∫ +∞
0
..
∫ +∞
0
(u1...uk)−α(k+2)/(k+1)(uk+1...um)−α(m−k−1)/(m−k)
(1 + u1 + ...+ um)2(1−α)(1 + u1 + ..+ uk)(1−α)k
× du1...dum(uk+1 + ..+ um)(1−α)(m−k−1)
, (4.2.1)
qui converge en zero pour α < (k + 1)/(k + 2). En l’infini en effectuant en
changement de coordonnees spheriques on ramene l’etude a celle de∫ +∞
a>0
r−αk(k+2)/(k+1)r−α(m−1−k)rm−1
r2(1−α)rk(1−α)r(1−α)(m−k−1)dr, (4.2.2)
qui converge pour α < (k + 1)/(k + 2). De meme, la convergence de∫Y
exp(−αψ2)dv est equivalente a celle de∫ +∞
0
..
∫ +∞
0
(u1...uk)−αk/(k+1)(uk+1...um)−α(m−k+1)/(m−k)
(1 + u1 + ...+ um)2(1−α)(1 + u1 + ..+ uk)(1−α)k
× du1...dum(uk+1 + ..+ um)(1−α)(m−k−1)
, (4.2.3)

58CHAPITRE 4. INVARIANT DE TIAN SUR DES VARIETES DE TYPE CALABI GENERALISEE.
qui converge en zero pour α < 1/2. En l’infini, cela revient a etudier la
convergence de∫ +∞
a>0
r−αk2/(k+1)r−α(m−k+1)r−(1−α)(m+1)rm−1dr, (4.2.4)
qui converge pour α < (k+1)/k, condition toujours verifiee, d’ou le corollaire
2.

Bibliographie
[1] T.Aubin– Reduction du cas positif de l’equation de Monge-Ampere sur
les varietes Kahleriennes a la demonstration d’une inegalite , J. Funct.
Anal. 57, 1984, 143-153.
[2] T.Aubin– Metriques d’Einstein-Kahler et exponentiel de fonctions ad-
missibles, J. Funct. Anal. 88, 1990, 385-394.
[3] T.Aubin– Some Non-linear Problems in Riemannian Geometry,
Springer-Verlag, Berlin, 1998.
[4] A.Ben Abdesselem– Lower bound of admissible functions on sphere,
Bull. Sci. Math. 126, 2002, 675-680.
[5] A.Ben Abdesselem et Dridi Brahim– Enveloppes inferieures de
fonctions admissibles sur l’espace projectif complexe. Cas dissymetrique,
Bull. Sci. Math, 2008.
[6] A.Ben Abdesselem et Dridi Brahim– Ricci tensor of the blowing-up
of the complex projective space, JP Journal of Geometry and topology,
2008.
[7] A.Ben abdesselem–P.Cherrier– Estimation of ricci tensor on certain
Fano manifolds, Math.Z.233, 2000,481-505
[8] A.Ben Abdesselem– Enveloppes inferieures de fonctions admissibles
sur l’espace projectif complexe. Cas symetrique, Bull. Sci. Math. 130,
2006, 341-353 .
[9] J.P. Bourguignon– Metriques d’Einstein-Kahler sur les varietes de
Fano : Obstructions et existence, Sem. Bourbaki, 1996-97, 277-305.
59

60 BIBLIOGRAPHIE
[10] L. Hormander – An introduction to complex analysis in several
variables, North-Holland, Amsterdam, 1973.
[11] A.M. Nadel– Multiplier ideal sheaves and Kahler-Einstein metrics of
positive scalar curvature, Ann. Math. 132, 1990, 549-596.
[12] Y.T. Siu– The existence of Kahler-Einstein metrics on manifolds with
positive anticanonical line bundle and suitable finite symmetry group,
Ann. of Math. 127, 1988, 585-627.
[13] G. Tian– On Kahler-Einstein metrics on certain Kahler manifolds with
C1(M) > 0, Invent. Math. 89, 1987, 225-246.
[14] G. Tian–S.T. Yau– Kahler-Einstein metrics on complex surfaces with
C1 > 0, Comment. Math. Phys., 112, 1987, 175-203.
[15] X. Zhu– Kahler-Ricci solitons on Toric Fano varieties, IHES/M/00/58,
2000.
[16] J. Grivaux– Kahler-Einstein metrics, Invent. Math. 73, 1983, 437-443.
Universite Pierre et Marie Curie, Paris, France.
e-mail : [email protected]




















