ON THE DEVELOPMENT OF UNIFIED SCHEME FOR DISCRETE SOFTWARE RELIABILITY GROWTH MODELING
17
International Journal of Reliability, Quality and Safety Engineering Vol. 17, No. 3 (2010) 245–260 c World Scientific Publishing Company DOI: 10.1142/S0218539310003780 ON THE DEVELOPMENT OF UNIFIED SCHEME FOR DISCRETE SOFTWARE RELIABILITY GROWTH MODELING P. K. KAPUR ∗,‡ , ANU G. AGGARWAL ∗ , OMAR SHATNAWI † and RAVI KUMAR ∗ ∗ Department of Operational Research University of Delhi, Delhi-110007, India † Department of Computer Science Al al-Bayt University, Mafraq 25113, Jordan ‡ [email protected] Received 18 December 2009 Revised 15 April 2010 The importance of Software Reliability Growth Models to control the testing process and for quantitative assessment of software reliability is a well established fact. How- ever, difficulties created by their underlying assumptions, their relevance and validity to real testing environment have made the selection of appropriate model an uphill task. Recently, new dimensions have been added to software reliability engineering with the development of unified modeling schemes. These schemes have proved seminal in the development of the general theory, partially because of their simplicity and mathemati- cal tractability. In this paper, we propose a unified scheme for discrete software reliability growth modeling using the fault detection/correction rate function. Standard probability distributions have been used to model the fault correction and detection times. Initially, we have formulated the unified scheme when the fault correction is immediate to the failure observation and later we extend it to the cases where removal is a two stage pro- cess namely failure observation followed by fault detection/correction. The use of fault detection/correction rate or else known as hazard rate to represent stage wise removal of fault during testing highlights the importance of the proposed framework. Convolution of probability distribution functions has been used to represent Stage-wise removal of fault i.e. failure observation, fault detection/fault correction. Few Discrete models have been derived using the proposed methodology. Parameter estimation on two real soft- ware failure datasets has been worked out. The results obtained are fairly accurate and quite encouraging. Keywords : Software reliability; failure observation; fault correction; hazard rate function; discrete probability distribution functions. 1. Introduction The role of software is expanding rapidly in many aspects of modern life, rang- ing from critical infrastructures to work-place automation, productivity enhance- ment, education, entertainment, etc. Given the potentially costly impact of software 245
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of ON THE DEVELOPMENT OF UNIFIED SCHEME FOR DISCRETE SOFTWARE RELIABILITY GROWTH MODELING

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
International Journal of Reliability, Quality and Safety EngineeringVol. 17, No. 3 (2010) 245–260c© World Scientific Publishing CompanyDOI: 10.1142/S0218539310003780
ON THE DEVELOPMENT OF UNIFIED SCHEMEFOR DISCRETE SOFTWARE RELIABILITY
GROWTH MODELING
P. K. KAPUR∗,‡, ANU G. AGGARWAL∗,OMAR SHATNAWI† and RAVI KUMAR∗
∗Department of Operational ResearchUniversity of Delhi, Delhi-110007, India
†Department of Computer ScienceAl al-Bayt University, Mafraq 25113, Jordan
Received 18 December 2009Revised 15 April 2010
The importance of Software Reliability Growth Models to control the testing processand for quantitative assessment of software reliability is a well established fact. How-ever, difficulties created by their underlying assumptions, their relevance and validity toreal testing environment have made the selection of appropriate model an uphill task.Recently, new dimensions have been added to software reliability engineering with thedevelopment of unified modeling schemes. These schemes have proved seminal in thedevelopment of the general theory, partially because of their simplicity and mathemati-cal tractability. In this paper, we propose a unified scheme for discrete software reliabilitygrowth modeling using the fault detection/correction rate function. Standard probabilitydistributions have been used to model the fault correction and detection times. Initially,we have formulated the unified scheme when the fault correction is immediate to thefailure observation and later we extend it to the cases where removal is a two stage pro-cess namely failure observation followed by fault detection/correction. The use of faultdetection/correction rate or else known as hazard rate to represent stage wise removal offault during testing highlights the importance of the proposed framework. Convolutionof probability distribution functions has been used to represent Stage-wise removal offault i.e. failure observation, fault detection/fault correction. Few Discrete models havebeen derived using the proposed methodology. Parameter estimation on two real soft-ware failure datasets has been worked out. The results obtained are fairly accurate andquite encouraging.
Keywords: Software reliability; failure observation; fault correction; hazard rate function;
discrete probability distribution functions.
1. Introduction
The role of software is expanding rapidly in many aspects of modern life, rang-ing from critical infrastructures to work-place automation, productivity enhance-ment, education, entertainment, etc. Given the potentially costly impact of software
245

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
246 P. K. Kapur et al.
failures for many of these applications, it is important to have sound methods ofdeveloping reliable software as well as accurate methods of quantitatively certifyingsoftware quality. The software reliability engineering attempts to provide quantita-tive measures of software reliability by predicting the number of faults remaining,the number of failures expected in a given time, how much time/effort is needed tofind a specified number of faults, or the probability of operating without failure ina specified time interval. Software reliability analysis is performed at various stagesof software development process as an attempt to evaluate if the software reliabil-ity requirements have been met. The analysis results not only provide feedback tothe designers but also become a quantitative metric of software quality. There aretwo activities related to software reliability analysis: estimation and prediction. Ineither activity, statistical inference techniques and reliability models are applied tofailure data collected during software testing or during its operation to measuresoftware reliability. The Software Reliability Growth Model (SRGM) is the tool,which is used to evaluate the software quantitatively, develop test status, deliverystatus and observe the changes in reliability performance.
Numerous Software Reliability Growth models, which relate the number of faultscorrected to execution time/number of test cases run, have been discussed in theliterature.11,13,17. These SRGMs have been developed under a number of sets ofassumptions regarding Fault removal process, skills of the testing team, possibilityof imperfect debugging and fault generation, distinction between fault detectionand correction processes etc. But no SRGM can be claimed to be the best asthe physical interpretation of the testing and debugging changes due to numerousfactors e.g. design of test cases, defect density, efficiency of testing team, availabilityof testing resources etc. The plethora of SRGMs makes model selection a tedioustask. Of late, a paradigm shift has been observed in the research in this field.Earlier research efforts concentrated on proposing new models along with theircomparison to some existing models. But no model could be recommended to beuniversally best. To overcome this difficulty, generalized modeling approaches havebeen proposed recently by many researchers. These schemes prove be very successfulfor obtaining several existing SRGM with single methodology and thus providean insightful investigation for the study of general models without making manyassumptions.
The work in this area started as early as in 1980s with Shantikumar18 proposinga generalized birth process model. Miller2 proposed generalized modeling frameworkbased on order statistics and record value and showed how NHPP based modelscan be represented by probability distribution functions of fault –detection times.Gokhale et al.4 used testing coverage function to present a similar unified frame-work. Dohi et al.3 proposed a unification method for NHPP models describing testinput and program path searching times stochastically by an infinite server queu-ing theory. They assumed test cases are executed according a homogeneous Poissonprocess (HPP) with parameter λ. The fault correction process was taken to besame as M/G/∞ queuing process i.e. the arrivals are assumed to be Poisson and

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
On the Development of Unified Scheme for Discrete 247
distribution of service times are general with infinite number of servers. The recentunification scheme (due to Kapur et al.7) is based on Cumulative Distribution Func-tion for the detection/correction times and incorporates the concept of imperfectdebugging in the generalized modeling framework.
However, the generalized modeling frameworks proposed earlier are restricted tocontinuous time SRGMs. Though the continuous time models are mathematicallyamenable but the importance of discrete modeling cannot be overlooked. The failuredatasets collected during the testing phase of SDLC are mainly discrete in nature.Therefore, it is advisable that the model being used for reliability assessment bealso discrete in nature so as to obtain an accurate picture of the software reliabilitygrowth process. The discrete modeling also yields good results with small amountof data.10,12,19
The initial effort for generalization of discrete models is due to Huang et al.5.He has discussed a unified scheme of discrete NHPP models by applying the con-cepts of weighted arithmetic, weighted geometric or weighted harmonic means.Okamura et al.16 have discussed a unified parameter estimation method based onthe expectation–maximization (EM) principle and investigated the effectiveness ofthe estimation method based on the EM algorithm by comparing with Newton’smethod. In this paper, we discuss a unified framework for discrete software reliabil-ity growth models in which the software failure-occurrence or the fault correctiontimes follow a discrete-time probability distribution and the initial fault contentof the software is assumed to be a Poisson random variable. Using our general-ized framework, we are able to express the mean value function for fault correctionprocess (FCP) in terms of discrete probability distribution. The fault correctionrate per remaining fault (or hazard rate function) has been written in terms offault correction probability density function and complementary distribution func-tions. The proposed scheme is developed for the case when the fault correction isimmediate to the failure observation process i.e. FCP is a single stage process. Itis easy to handle and help in deriving various models using Geometric, DiscreteRayleigh (D-Rayleigh), D-Weibull, D-Logistic and D-Erlang K-type distribution.After that, we extend our proposed framework for the case when FCP is a twostage process- Failure observation followed by fault correction. Two-fold discreteconvolutions have been used to represent the time differentiation between Failureobservation and fault correction processes. In this case, the hazard rate functionhas also been written in terms of 2-fold convolutions of two discrete distributions.
We have also performed data analysis using real life software testing and debug-ging data for the FCP derived for different discrete standard probability distribu-tion functions. The parameter estimation has been done with. Statistical softwarepackages using Non-linear Regression.
Rest of this paper is organized as follows: In Sec. 3, we discuss unified Scheme fordiscrete software reliability growth modeling for one stage Fault Correction Processfollowed by derivation of several discrete NHPP based SRGM by using differentdiscrete probability distribution functions in Sec. 4. Section 5 includes numerical

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
248 P. K. Kapur et al.
examples for the proposed model using actual testing and debugging data sets. InSec. 6, we present unified modeling framework for the two-stage FCP. Finally, thepaper concludes with a brief summary and directions for future research in Sec. 7.
2. Notations
m(n) Mean value function (MVF) or the expected number of faults corrected by n testcases.
a Expected number of initial faults lying dormant in the software when the testingstarts.
λ(n) Intensity functions for Fault Correction Process.F (n), G(n) Probability Distribution Function for Number of Test cases run during Failure
observation and Fault Correction respectively.f(n), g(n) Probability mass Function for Number of Test cases run during Failure observa-
tion and Fault Correction respectively.
3. Unified Scheme for Discrete Software Reliability GrowthModeling for One Stage Fault Correction Process
Here, we discuss a unified framework for discrete software reliability growth mod-eling in which the software failure-occurrence or the fault correction times follow adiscrete-time probability distribution. The unified scheme is based on the followingassumptions:
3.1. Basic assumptions
(1) During testing, test cases are executed, and the results obtained are comparedwith the desired output. If there is a mismatch, a failure is said to have occurred.
(2) Each time a software failure is observed, immediate correction effort starts andthe underlying fault is corrected perfectly and no new faults are introduced inthe software.
(3) There is no time delay between the observation of the failure and the correctionof the underlying fault i.e. as and when a failure is observed, the underlyingfault is immediately corrected. Therefore, fault correction process is a one-stageprocess.
(4) Fault correction times are i.i.d. random variables with probability distributionfunction G(n).
(5) The initial number of faults in the software system Xo at n = 0 is a Poissonrandom variable with mean of a.
3.2. Model development
Let the counting processes {X(n), n ≥ 0} represent the cumulative number of fail-ures observed/faults corrected by n number of test cases and let the test begun

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
On the Development of Unified Scheme for Discrete 249
at n = 0. Then the distribution of X(n) is given by
Pr{X(n) = m} =∞∑
j=0
Pr{X(n) = m|Xo = j}Pr{Xo = j} (1)
Here it may be noted that the conditional probability Pr{X(n) = m|Xo = j} iszero for j < m. For j ≥ m it is given by
Pr{X(n) = m|Xo = j} =(
j
m
)(G(n))m(1 − G(n))j−m (2)
Here we have assumed that the initial fault content of the software, denoted by Xo,is a discrete random variable and its probability mass function is given by Poissondistribution with mean a i.e.
Pr{Xo = j} =aj exp(−a)
j!(3)
Therefore, we have
Pr{X(n) = m} =∞∑
j=0
(j
m
)(G(n))m(1 − G(n))j−m aj exp(−a)
j!
=[aG(n)]m
m!exp(−a)
∞∑j=0
[a(1 − G(n))]j−m
(j − m)!
Here it can be noted that∞∑
j=0
[a(1 − G(n))]j−m
(j − m)!= exp(a(1 − G(n)))
From above we obtain
Pr{X(n) = m} =(aG(n))m exp(−aG(n))
m!(4)
From Eq. (4), we can conclude that the fault correction process (FCP) follows apoison process if the probability mass function of the initial fault content followsthe Poisson distribution and mean value function (MVF) of FCP is given by:
m(n) = E[X(n)] = aG(n) (5)
This equation defines the correction process as one stage process where no timeis lost between the failure observation and its correction. By selecting suitableprobability distribution function, we can derive MVF for several existing and newFinite failure count Discrete models.
From Eq. (5), the instantaneous failure intensity function λ(n) is given by:
λ(n) = a g(n)
Here λ(n) = m(n + 1) − m(n) and g(n) = ∆G(n) = G(n + 1) − G(n).

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
250 P. K. Kapur et al.
Or we can write
λ(n) =g(n)
1 − G(n)[a − m(n)] (6)
Let us define
s(n) =g(n)
1 − G(n)(7)
Here s(n) represents hazard rate function or failure occurrence rate per remainingfault of the software, or the rate at which the individual faults manifest themselvesas failures during testing.
The expression of hazard rate function s(n) in terms of probability distribu-tion function gives the directions for incorporating the case of time differentiationbetween the stages of failure observation and fault correction. This study has beendiscussed in detail in Sec. 5 of this paper under the title “Scope and Directions offuture research”.
4. Derivation of Existing and New Discrete SRGM
4.1. Probability distribution functions for modeling
detection/correction times
In this paper we have used following probability distributions functions for modelingrandom number of test cases run during fault detection/correction process.
Geometric distributionThis is the most simple and widely used discrete distribution in reliability engi-
neering modeling because it has a constant rate. It indicates the uniform distribu-tion of faults in the software code where each and every fault has same probabilityfor its removal. The faults are easy to correct and testing team is highly skilled.Geometric Distribution is a discrete analog of the exponential distribution.
Though in most of the software testing projects, for sake of simplicity, the correc-tions are assumed to follow Geometric Distribution, but to achieve a more flexiblemodeling of removal times, we can use Discrete Rayleigh or Weibull distribution.Both of these distributions are generalization of Geometric distribution only.
Rayleigh distributionContrary to the Geometric distribution, Discrete Rayleigh distribution has
monotonically increasing failure rate. Applying the discrete Rayleigh distributionto a software-fault correction means that the faults in the software are complexand the initial testing skill of test-case designers is low; however, their testing skillimproves as the testing progresses.
Weibull distributionIt can represent different types of curves depending on the values of its shape
parameter and hence extremely flexible. It is very appropriate for representing the

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
On the Development of Unified Scheme for Discrete 251
processes with fluctuating rate i.e. increasing/decreasing or constant rates. It canimplicitly model both types of correction processes:
• When there is imperfect debugging & error generation (decreasing failure rate);• When the skills of testing team grows as testing progress (increasing failure rate).
Logistic distributionA Logistic distribution is one of the simplest distributions for estimating an
S-shaped software reliability growth curve. It represents the learning of the teamand has monotonically increasing failure rate.
Erlang distributionDiscrete Erlang distributions are extensions of Geometric distribution where the
fault removal consists of multiple steps e.g. generation of failure report, its analysisand correction followed by verification and validation. Discrete Erlang distributionis nothing but the distribution of sum of independently distributed geometric vari-ates. It is more commonly known as Negative Binomial distribution in probabilitytheory.
By combining above-mentioned distributions in our proposed approach; we canexplain a number of existing SRGM formulated for different T&D scenario. In thenext section we discuss how to obtain MVF of the various existing SRGM andpropose few new models also.
4.2. MVF for various new and existing models
SRGM-1The following Geometric distribution function can be used to model SRGM-1:
G(n) = [1 − (1 − b)n] (8)
Then,
s(n) =g(n)
1 − G(n)= b (9)
Substituting the value of G(n) from Eq. (8) into Eq. (5), we get:
m(n) = a [1 − (1 − b)n] (10)
which is same as Discrete Exponential model given by Yamada and Osaki.19
SRGM-2Now we will discuss the case when G(n) is Discrete Rayleigh Distribution. i.e.
G(n) = [1 − (1 − b)n2] (11)

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
252 P. K. Kapur et al.
Then,
s(n) = 1 − (1 − b)2n+1 (12)
And the corresponding MVF is given by
m(n) = a[1 − (1 − b)n2] (13)
This is Discrete Rayleigh model.
SRGM-3This software reliability growth model represents the case when correction pro-
cess follows discrete Weibull distribution. i.e.
G(n) = [1 − (1 − b)nk
] (14)
Then,
s(n) = 1 − (1 − b)Pk−1
j=0
„kj
«nj
(15)
And the corresponding MVF is given by
m(n) = a[1 − (1 − b)nk
] (16)
Here b, k are scale and shape parameters. This is same as the Discrete Weibullmodel.
SRGM-4This software reliability growth model represents the case when correction pro-
cess follows discrete Logistic distribution. i.e.
G(n) =[
1 − (1 − b)n
1 + β(1 − b)n
](17)
Then,
s(n) =b
(1 + β(1 − b)(n+1))(18)
And the corresponding MVF is given by
m(n) = a
[1 − (1 − b)n
1 + β(1 − b)n
](19)
It is same as the discrete flexible model due to Kapur et al.12 Here it may beobserved that for β = 0, this model is nothing but Discrete Exponential model.

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
On the Development of Unified Scheme for Discrete 253
5. Model Validation, Comparison Criteria and Data Analysis
5.1. Model validation
As we know SRGM are used to assess the software quality based on which decisionsuch as release time and maintenance costs during the field use are estimated. Asuccessful application of an SRGM requires accurate estimation of its parametersto make accurate decisions by using actual testing and debugging data set of thesame project or of a similar software project. Non-linear regression based on leastsquare method has been used for Parameter estimation and MSE (Mean SquaredError) and R2 has been used as the performance comparison criteria. For fasterand accurate calculations, the statistical package SPSS has been utilized for thepurpose. The goodness of fit curves have been drawn to illustrate the fitting of themodels to the data graphically.
To illustrate the estimation procedure and application of the SRGM we havecarried out the data analysis of following two real software data sets.
Data set 1 (DS-1)
The first data set (DS-1) had been collected during 35 months of testing a radarsystem of size 124 KLOC and 1301 faults were detected during testing. This datais cited from Brooks and Motley.1
Data set 2 (DS-2)
The second data set (DS-2) had been collected during 19 weeks of testing areal time command and control system and 328 faults were detected during testing.This data is cited from Ohba.15
5.2. Comparison criteria for SRGM
The performance of SRGM are judged by their ability to fit the past software faultdata (goodness of fit) and predicting the future behavior of the fault.
Goodness of fit criteriaThe term goodness of fit is used in two different contexts. In one context, it
denotes the question if a sample of data came from a population with a specificdistribution. In another context, it denotes the question of “How good does a math-ematical model (for example a linear regression model) fit to the data”?
5.2.1. The mean square -error (MSE)
The model under comparison is used to simulate the fault data, the differencebetween the expected values, m̂(ni) and the observed data yi is measured by MSEas follows.
MSE =k∑
i=1
(m̂(ni) − yi)2
k

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
254 P. K. Kapur et al.
where k is the number of observations. The lower MSE indicates less fitting error,thus better goodness of fit.
5.2.2. Coefficient of multiple determination (R2)
We define this coefficient as the ratio of the sum of squares resulting from the trendmodel to that from constant model subtracted from 1.
i.e. R2 = 1 − residual SScorrected SS
R2 measures the percentage of the total variation about the mean accounted forthe fitted curve. It ranges in value from 0 to 1. Small values indicate that the modeldoes not fit the data well. The larger R2, the better the model explains the variationin the data.11
5.3. Data analyses
The SRGM with mean value function m(n) given by Eqs. (10), (13), (16) and (19)are estimated for finding their unknown parameters.
For DS-1
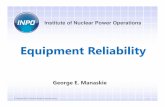
The parameter estimation and comparison criteria results for DS-1 of all the modelsunder consideration can be viewed through Table 1. The fitting of the models toDS-1 is graphically illustrated in Fig. 1. SRGM-1 shows a poor fitting to the actualvalues of the real time data set while SRGM-4 fits the data excellently well.
For DS-2
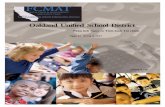
The parameter estimation and comparison criteria results for DS-2 of all the modelsunder consideration can be viewed through Table 2. The fitting of the models toDS-2 is graphically illustrated in Fig. 2. SRGM-2 shows a poor fitting to the actualvalues of the real time data set while SRGM-3 and SRGM-4 fit the data quitewell.
5.4. Model parameter estimation results
Table 1. Parameter estimation results for DS-I.
Parameters
Model a b k/β R2 MSE
SRGM1 10588 0.004218 − 0.9581 8923.86SRGM2 1373 0.003 − 0.996 837.89SRGM3 1326 0.00161 2.227 0.997 584.17SRGM4 1331 0.18175 20.163 0.999 203.79

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
On the Development of Unified Scheme for Discrete 255
Table 2. Parameter estimation results for DS-2.
Parameters
Model a b k/β R2 MSE
SRGM1 761 0.0318 − 0.986 139.82
SRGM2 327 0.01149 − 0.969 320.97SRGM3 428 0.0355 1.284 0.990 102.12SRGM4 382 0.1637 2.8864 0.992 82.70
5.5. Goodness of fit curves
0
200
400
600
800
1000
1200
1400
1600
1 5 9 13 17 21 25 29 33Time
Nu
mb
er o
f F
ault
s
m(t)
SRGM-1
SRGM-2
SRGM-3
SRGM-4
Fig. 1. For DS-1.
0
50
100
150
200
250
300
350
400
1 4 7 10 13 16 19Time
Nu
mb
er o
f F
ault
s
m(t)
SRGM-1
SRGM-2
SRGM-3
SRGM-4
Fig. 2. For DS-1I.
6. Scope and Directions for Future Research: Unified Scheme forDiscrete Software Reliability Growth Modeling for Two StageFault Correction Process
6.1. Model development
Most of the SRGM reported in the last few decades assume failure observationprocess is followed by immediate fault correction. While in reality, each observed

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
256 P. K. Kapur et al.
failure is reported, the underlying fault is detected, corrected and then verified.Therefore, the time from failure observation to fault detection and finally its cor-rection should not be neglected in software testing process. When the correctionin done in two stages, then the fault correction process is given by the followingdifferential equation:
∆m(n) = m(n + 1) − m(n) =∑n−1
k=0 g(n − k)∆F (k)
(1 − ∑n−1k=0 G(n − k)∆F (k))
[a − m(n)] (20)
Let us define
s(n) =∑n−1
k=0 g(n − k)∆F (k)
(1 − ∑n−1k=0 G(n − k)∆F (k))
(21)
Here s(n) is fault observation-correction rate per fault or the hazard rate func-tion. It is given in terms of two-fold discrete convolution of failure observation andcorrection distribution functions only.
Solving the above, we have
m(n) = a
[n−1∑k=0
G(n − k)∆F (k)
](22)
This equation represents two stage fault correction under perfect debuggingconditions.
6.2. Derivation of existing and new discrete SRGM
By assuming different probability distribution functions for number of test casesexecuted during failure observation and fault correction processes, we can derivefew SRGM as follows:
SRGM-5
This SRGM is based on the assumption that numbers of test cases run duringfailure observation as well as fault correction follow Geometric distribution. i.e.
F (n) = [1 − (1 − b)n] and G(n) = [1 − (1 − b)n] (23)
Then,
s(n) =b2(n + 1)(1 + bn)
(24)
It may be observed that s(n) is an increasing function of n and the limiting valueof s(n) is b. It indicates the learning of testing team during the correction process.Using Eq. (23) in Eq. (22), we get:
m(n) = a[1 − (1 + bn)(1 − b)n] (25)
which is same as discrete delayed S-shaped model due to Kapur et al.9

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
On the Development of Unified Scheme for Discrete 257
SRGM-6
This SRGM is based on the assumption that there is a greater time lag betweenfailure observation and fault correction as compared to SRGM-5. Here it is assumedthat number of test cases run during failure observation follow Geometric distri-bution while number of test cases run during fault correction is Erlang-2 type i.e.
F (n) = [1 − (1 − b)n] and G(n) = [1 − (1 + bn)(1 − b)n] (26)
Then,
s(n) =b3(n + 1)(n + 2)/2
(1 + bn + b2n(n + 1)/2)(27)
Like SRGM-5, here also the corresponding s(n) is an increasing function of n withb as its limiting value. Here the faults of the software are more severe and requiremore time for correction. Using Eq. (26) in Eq. (22), we get:
m(n) = a[1 − (1 + bn + b2n(n + 1)/2)(1 − b)n] (28)
Which is same as discrete Erlang-3 stage model due to Kapur and Younes.10
These are just the few illustrations of the models which may be derived with theproposed unified modeling scheme for two-stage fault correction process. Presentlywe are working on their parameter estimation and goodness of fit/predictive anal-ysis. More discrete distributions apart from discussed here may be incorporated inthis framework and many new models may be worked out. Their feasibility andworkability will be discussed in our future research papers.
7. Conclusion
In this paper, a unified framework for discrete software reliability growth modelshas been presented. This approach considers two cases for the modeling of faultcorrection process:
Case 1: FCP is a one stage process i.e. Fault is corrected immediately after failureobservation.
Case 2: FCP is a two stage process with a time delay between failure observationand its correction.
The framework presented here proves to be excellent for deriving a wide varietyof discrete models by using different probability distribution functions. The tech-nique is simple and presents a unique methodology for developing many new aswell as existing models for different design environment. In this paper we have usedstandard distributions e.g. Geometric, Erlang 2-type, Discrete Weibull, Rayleighand Logistic. Their validity and accuracy have been carried out on two real soft-ware failure datasets. The results obtained are quite encouraging as can be viewedthrough the numerical illustrations shown in tables obtained after the parameter

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
258 P. K. Kapur et al.
estimation. Future research areas under unified modeling approach include work-ing out few other techniques using Infinite Server queuing theory or Delayed Faultdetection- correction process. Convolutions of Discrete distributions have been usedto represent the two-stage correction process which can be further studied to definethe complexity of faults of the software. In future work the possibility of includingchange point or the modeling using stochastic differential equations can be workedout. The concept of unification provides an area of interesting study which can easeout the problem of model selection for the software developer and thus make thesetechniques more accessible and applicable.
Acknowledgments
The research work presented in this paper is partially supported by grants to thefirst author from Defence Research & Development Organization (DRDO), India.
References
1. W. D. Brooks and R. W. Motley, Analysis of discrete software reliability models, Tech-nical Report (RADC-TR-80-84), Rome Air Development Center (New York, 1980).
2. D. R. Miller, Exponential order statistic models of software reliability growth, IEEETrans. Software Eng. 12(1) (1986) 12–24.
3. T. Dohi, S. Osaki and K. S. Trivedi, An infinite server queuing approach for describingsoftware reliability growth — Unified modeling and estimation framework, in Proceed-ings of the 11th Asia-Pacific Software Engineering Conference (APSEC’04)(2004), pp.110–119.
4. S. S. Gokhale, T. Philip, P. N. Marinos and K. S. Trivedi, Unification of finite failurenon-homogeneous poisson process models through test coverage, in Proc. Intl. Sym-posium on Software Reliability Engineering (ISSRE 96), White Plains, NY (1996),pp. 289–299.
5. C. Y. Huang, M. R. Lyu and S. Y. Kuo, A unified scheme of some non-homogeneousPoisson process models for software reliability estimation, IEEE Trans. on SoftwareEng. 29 (2003) 261–269.
6. S. Inoue and S. Yamada, Discrete software reliability assessment with discretizedNHPP models, Computer & Mathematics with Applications 51(2) (2006) 161–170.
7. P. K. Kapur, H. Pham, S. Anand and K. Yadav, A unified approach for developingsoftware reliability growth models in the presence of imperfect debugging and errorgeneration, under revision, IEEE Transactions on Reliability (2009).
8. P. K. Kapur and R. B. Garg, A software reliability growth model for an fault removalphenomenon, Software Engineering Journal 7 (1992) 291–294.
9. P. K. Kapur, M. Bai and S. Bhushan, Some stochastic models in software reliabilitybased on NHPP, In Contribution to Stochastic, N. Venugopal (Ed.), Wiley EasternLimited, New Delhi (1992).
10. P. K. Kapur and S. Younes, A general discrete software reliability growth model,published in Operations Research-Theory and Practice, Spaniel Publishers, New Delhi(1995).
11. P. K. Kapur, R. B. Garg and S. Kumar, Contributions to Hardware and SoftwareReliability, World Scientific Publishing Co. Ltd. Singapore, (1999).

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
On the Development of Unified Scheme for Discrete 259
12. P. K. Kapur, Gupta Amit, Gupta Anu and A. Kumar, Discrete software reliabilitygrowth modeling, published in “Quality, Reliability and IT (Trends & Future Direc-tions)”, P. K. Kapur and A. K. Verma (Eds.), Narora Publications Pvt. Ltd., NewDelhi (2005).
13. J. D. Musa, A. Iannino and K. Okumoto, Software Reliability: Measurement, Predic-tion, Applications (McGraw Hill, New York, 1987).
14. N. Langberg and N. D. Singpurwalla, A unification of some software reliability models,SIAM J. Scientific and Statistical Computing 6(3) (1985) 781–790.
15. M. Ohba, Software reliability analysis models, IBM Journal of Research and Devel-opment 28 (1984) 428–443.
16. H. Okamura, A. Murayama and T. Dohi, EM algorithm for discrete software reliabilitymodels: A unified parameter estimation method, in Proc. 8th IEEE Int. Symp. (2004),pp. 219–228.
17. H. Pham, System Software Reliability, Reliability Engineering Series (Springer, 2006).18. J. G. Shanthikumar, A General Software Reliability Model For Performance Predic-
tion, Microelectronics Reliability 21 (1981) 671–682.19. S. Yamada and S. Osaki, Discrete software reliability growth models, Applied —
Stochastic Models and Data Analysis 1 (1985) 65–77.
About the Authors
P. K. Kapur is Professor and Head of the Department of Operational Research andDean of the Faculty of Mathematical Science, University of Delhi. He is currentlythe president of Society for Reliability Engineering, Quality and Operations Man-agement (Regd.) (since 2000) and former president of Operational Research Societyof India. He obtained his Ph.D. degree in Reliability Theory (Operational Research)from University of Delhi in 1977. He has published extensively in Indian journalsand abroad in the areas of Marketing, Hardware Reliability, Optimization, Queue-ing Theory and Maintenance and Software Reliability (more than 200 papers). Prof.P. K. Kapur has edited three volumes and currently editing fourth volume on Qual-ity, Reliability and IT. Prof. P. K. Kapur has edited three volumes on OperationsResearch and co-authored two books: “Contributions to Hardware and SoftwareReliability (1999)” published from World Scientific, Singapore and “Software Reli-ability Assessment with O.R. Applications,” Springer (to be published in 2010).He has edited special issues of International Journal of Reliability, Quality andSafety Engineering (2004), OPSEARCH, India (2005) and International Journal ofPerformability Engineering (IJPE India, 2006).
Anu G. Aggarwal received her Ph.D. degree in Software Reliability from Universityof Delhi, Delhi. She is presently on the faculty in the Department of OperationalResearch, University of Delhi. She has published several papers in the area of soft-ware reliability. Her current research interests include soft computing. She is amember of Society for Reliability Engineering, Quality and Operations Manage-ment (SREQOM).
Omar Shatnawi received his Ph.D. in Computer Science and his M.Sc. in Opera-tional Research from University of Delhi in 2004 and 1999, respectively. Currently,

October 26, 2010 14:22 WSPC/S0218-5393 122-IJRQSES0218539310003780
260 P. K. Kapur et al.
he is head of Department of Information Systems at al-Bayt University. His researchinterests are in software engineering, with an emphasis on improving software reli-ability and dependability.
Ravi Kumar received his M.Sc. and M.Phil. degree in Operational Research fromUniversity of Delhi, Delhi. He is pursuing his Ph.D in the Department of OperationalResearch University of Delhi, Delhi. He has published several papers in the areaof Software Reliability. He is the member of Society for Reliability Engineering,Quality and Operations Management (SREQOM).

Copyright of International Journal of Reliability, Quality & Safety Engineering is the property of World
Scientific Publishing Company and its content may not be copied or emailed to multiple sites or posted to a
listserv without the copyright holder's express written permission. However, users may print, download, or
email articles for individual use.