Large-eddy simulations around a NACA0012 airfoil at ... - arXiv

Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
23rd Bristol International Unmanned Air Vehicle Systems Conference
1
Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
Manas S. Khurana, Arvind K. Sinha and Hadi Winarto The Sir Lawrence Wackett Aerospace Centre - RMIT, Melbourne, VIC, 3000
Abstract Re-Configurable Multi Mission Unmanned Aerial Vehicle (RC-MM-UAV) emerging
design concept involves morphing wings with mission segment based airfoils. To identify the appropriate planform, the Direct Numerical Optimization (DNO) methodology is applied in the design. The method requires a flexible geometrical shape function for airfoil parameterisation coupled with a validated computational flow solver for aerodynamic computation. The two sub-systems operate concurrently with an intelligent search agent to obtain an optimal planform. In this study, airfoil shapes are represented with the PARSEC shape function and a low order panel method for quick turn-around time is used to establish the aerodynamic coefficients. A scholastic optimisation technique based on the Particle Swarm theory is proposed that iteratively examines candidate airfoils, until convergence based on user specified objectives and constraints. A single-objective flight condition is examined to test the robustness and flexibility of the DNO set up. An optimum airfoil is defined as a planform with minimum drag performance, thus maximizing the lift-to-drag ratio. Fixed operating conditions include the lift coefficient, angle-of-attack, Reynolds and Mach number. Geometrical constraints are imposed to control the thickness-to-chord ratio of the final airfoil. The obtained results show that the proposed methodology is capable of providing acceptable designs. The use of high-fidelity solvers in comparison to panel methods would make the DNO structure computationally inefficient, thus the use of artificial neural networks is proposed for further analysis in the design of RC-MM-UAV airfoils.
Biography
Manas holds a Bachelor of Engineering Degree in Aerospace with Honours and also a Graduate Certificate in Engineering Management. He is currently undertaking a PhD program in computational and applied aerodynamic design optimisation of morphing airfoils. In addition to his candidature, Manas is also a Research Assistant at the Wackett Aerospace Centre. Arvind K. Sinha has a service record of 31 years, which includes Defence forces, industry and academic institutions. He has several qualifications, scholarships, awards, industrial research projects, research papers and public presentations to credit. He is presently the Director of Aerospace and Aviation at the Wackett Aerospace Centre, Melbourne, Australia.
Hadi Winarto is an Associate Professor at the School of Aerospace, Mechanical and Manufacturing Engineering. His research areas include applied and computational aerodynamic design with emphasis on software development, analysis of turbulent flows and thermo-fluid dynamics.

Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
23rd Bristol International Unmanned Air Vehicle Systems Conference
2
I. Introduction NMMANED Aerial Vehicles have assumed several roles that were once dedicated to manned platforms and provide support for dull, dirty and dangerous missions. Typical sorties include missions
that span over an extended period of time which can typically be accomplished by unmanned systems. Long endurance surveillance roles are not ideal for manned platforms due crew fatigue leading to a loss of situational awareness. Suppression of Enemy Air Defense (SEAD) units pose increase threat levels and UAVs are slowly assuming these roles with the use of smarter and intelligent munitions on board. Thus UAVs can offer greater endurance with optimum operating performance over an extended time frame. With advancements in aerospace sciences including aerodynamics, structures and survivability systems, a UAV can maximise its performance based on the maximum allowable strength of the structure, instead of being limited to the tolerances of a human pilot. With the absence of human support systems, greater flexibility is available in the allocation of mission critical payload systems. The unmanned platform further provides an operationally viable and cost effective solution in comparison to manned systems. Human life support systems are no longer a requirement, thus smaller and lighter airframe models can be implemented with greater design freedom to account for a stealthier and more maneuverable system. Maintenance costs are further limited due to the absence of life support systems thus quick turn-around time between missions is possible. The total number of UAVs within a fleet can further be reduced as a result. With current conflict scenarios, it is difficult to segregate between different mission roles, thus a flexible operating system is demanded. Traditionally, multiple units would be required in the accomplishment of a single mission. Target management and assessment requires Intelligence, Surveillance and Reconnaissance (ISR) through a long endurance UAV while the suppression of hostile units requires a separate armed platform. Thus a typical mission would encompass multiple agents operating concurrently within a secluded area of operation. Operators as a result, face considerable issues and challenges in maintaining such a large fleet of UAV. Thus the need to develop a robust and flexible platform is a required to address this issue. UAV technology has reached a level of maturity such that the development of a multi-role platform is a necessity. Payload flexibility allows operators to accommodate for multiple mission critical systems including imaging sensors for data gathering to bombs for SEAD operations. A multi-role system also requires severe design modifications, to satisfy the different operating conditions. Optimum performance for slow-speed, high altitude maneuvers, over extended periods of time for ISR roles requires large aspect ratio wings. Mission transition from an endurance to attack mode, requires high speed dash segments thus changes to wing geometry to account for this phase change. The system must have the added capability to safely transit between different mission segments in order to satisfy the new missions goals. As a result, a multi-mission package can be designed to satisfy multiple missions within a single platform, thus eliminating the need to design uni-mission based systems. The operating window of the
The RC-MM-UAV design concept is designed to address the identified issues and challenges of maintaining a large fleet of uni-mission UAVs.2 The need to develop a robust and flexible operating platform, with operating capabilities to provide optimum performance across several missions is the motivating factor behind the development of such a system. Each mission requires a different set of performance parameters that must be satisfied in terms of maximum speeds, endurance capabilities and operating altitudes. Performance requirements vary considerably from mission-to-mission, thus developing a multi-role platform is a challenging prospect.
The Sir Lawrence Wackett Aerospace Centre pioneered a conceptual design of Re-Configurable Multi-Mission Unmanned Aerial Vehicle (RC-MM-UAV) for futuristic civil and military operational needs. Uni mission UAVs presently are under various stages of design, development and trials as an alternative over manned systems to address dull, dirty and dangerous missions. Future operational doctrines merit the development of a Multi-Mission UAV to cover a wide mission spectrum and to further address the high acquisition costs associated with maintaining a large fleet of uni-mission platforms. Current research indicates the development of mission segment based airfoils for futuristic multi-role platforms. Variations in operating altitudes and speeds, based on disparate mission requirements demand airfoil shape morphing for optimal performance. Application of morphing airfoils for mission segment transformation from high-altitude endurance to quick dash segments is an example of this notion. The contents of this paper are as follows: Airfoil shape optimisation methodologies are presented in section II. The direct search approach is adopted and the parameters utilised are defined in section III. The optimiser set-up is covered in section IV with results and discussions for an optimiser simulation for a single-
U

Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
23rd Bristol International Unmanned Air Vehicle Systems Conference
3
objective airfoil presented in section V. A summary of findings and future research direction is covered in section VI.
II. Airfoil Optimisation Design Process The preliminary stages of design involves, an off-the shelf airfoil section to evaluate flight performance,
followed by a detail design optimisation study to finalise the planform shape for optimal flight performance. The approaches adopted are direct and inverse optimisation methods.
Inverse Design Approach It develops the shape of the lifting body based on user specified flow conditions for a required flight condition. The inverse approach can be used to control local velocity gradients and boundary layer development through the specification of pressure coefficient distribution. A set of velocity plots are to be defined based on the operating condition to be optimised. Development of suitable velocity profiles for maximising lift at slow maneuvers to drag minimisation for high endurance sorties are typical operating conditions to be considered in the design of airfoils. A parameterisation scheme is used to represent the pressure profile over the lifting surface. An initial baseline shape is generated and the corresponding flowfield computed to obtain the current coefficient-of-pressure. The inverse problem then applies a geometrical correction value based on the difference between specified and calculated pressure profile. A new profile is generated with the applied correction factor until the pressure difference is within a stipulated tolerance3. The method is restricted as a direct physical solution may not be available for a given condition. Also generation of a realistic planform shape may not be viable for some performance requirements. Thus, alternate design optimisation methods will need to be examined. Direct Search Method A mathematical shape function is coupled into a validated flow solver for analysis within an optimization algorithm (Fig .1Figure 1) and is known as the Direct Numerical Optimisation (DNO) process. The shape is represented through an analytical function as an input to the flow solver. The optimizer evaluates the viability of the proposed shape based on the required objective function. If the examined section fails to satisfy user defined objectives and constraints, the design variables within the shape function are modified and a new airfoil is produced for analysis. An automated search process is formalized. It operates iteratively until the objectives in accordance to geometrical and aerodynamic constraints are satisfied (Fig. 1).
The feasibility of the final solution is dependent on the set-up of the DNO architecture. Prior to applying the methodology for airfoil shape optimisation, the three DNO sub-components including airfoil shape function, flow solver and the general optimisation algorithm must be individually validated, through a series of test runs. Each method is unique in its design application and different software packages and coding languages are used to complete the overall system set-up (Fig. 2). MATLAB is utilised as a ‘parent’ system in the overall integration process. A series of batch commands within MATLAB are used to process external tools which act as ‘slaves’ to form the overall structure. These include preparation of airfoil geometry for flow analysis in GAMBIT, based on airfoil shape function design variables as generated in
Figure 1. Direct Numerical Optimization Approach for Airfoil Analysis

Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
23rd Bristol International Unmanned Air Vehicle Systems Conference
4
MATLAB. The mesh is then substituted into FLUENT for aerodynamic computation, through an automated execution script file that formalises the solver set-up for each shape examined. The results are then submitted through a series of data files into MATLAB, which measures the feasibility of the proposed airfoil based on user defined objectives and constraints. The process operates iteratively until the termination criterion is satisfied. Thus, each DNO sub-system must first be validated to test the flexibility of the system. The overall integration process follows confirming that the system is operational. The validation process undertaken within the overall DNO structure and areas requiring further development are as follows:
Airfoil Shape Function
The shape functions used to represent candidate airfoils must be flexible for various classes of airfoils to be examined with minimal number of design variables. A detail airfoil parameterization study was undertaken to examine different approaches for shape representation.4-7 The PARSEC shape function (Fig. 3)8 was selected for shape representation within the proposed DNO model (Fig. 1). The method was confirmed through a series of convergence tests, by measuring the effectiveness of the model in accurately duplicating different classes of airfoils.6 It resulted in acceptable geometrical and aerodynamic convergence between the theoretical and approximated planforms.6 The PARSEC design variables were further defined to establish a relationship between each variable and its effect on airfoil geometry and aerodynamics.9 The variables were sensitive to drastic changes in magnitude. Each variable could be characterized by a design limit which resulted in the generation of smooth and realistic shapes. Variable perturbation also allowed for one-to-one geometrical control with variations in thickness-to-chord, camber and leading and trailing edge wedge angles permissible.9 Shape representation through design variables outside the identified window resulted in undulating shapes. The effect of individually perturbing each variable on the aerodynamic performance was also measured.9 Variables with strong influence on lift-to-drag performance were identified. Parameters that offer acceptable drag, but inadequate lift over a stipulated operating condition were also identified. The behavior of each PARSEC variable was mapped accordingly though a series of Self-Organising-Maps. The information can be applied to establish geometrical constraints in airfoil development for the RC-MM-UAV.
Aerodynamic Flow Solver
Aerodynamic shape optimisation investigations require a computational solver to establish the aerodynamics of potential solutions. A detail validation process is needed for optimisation purposes. The final solution is governed by the capability of the solver in computing the aerodynamics of a potential shape to meet the accepted level-of-accuracy. Flow behavior over an airfoil is complex and is dependent on the operating conditions. The contour of the lifting body affects the location and extent of laminar and turbulent flow regions. Adverse pressure gradients results in flow transition leading to separation and loss of lift. These factors influence airfoil aerodynamics, in particular drag, which is sensitive to flow changes. Since the final solution is measured from the aerodynamics of the proposed geometry, a robust and validated computational tool is required.
Figure 2. DNO Software Integration Structure
Figure 3. PARSEC Airfoil

Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
23rd Bristol International Unmanned Air Vehicle Systems Conference
5
The use of high-fidelity solvers is identified as a requirement to address this issue. Computational Fluid Dynamic (CFD) is used to evaluate flow patterns over an airfoil surface. Different CFD models are available with variations in solver capabilities. Full potential solvers, that solve the potential equation provide efficient computation turn-around time, but are limited in accuracy. The model bases the solution on the assumption that the flow is irrotational and inviscid,10 thus not valid for airfoil drag reduction problems. Time-dependent Euler equations model the rotational flow properties thus suitable for drag minimisation optimisation routines. Computationally, the Euler functions are intense in comparison to potential flow solutions, but the use of parallel processing units can be used to address this issue.
A validation study is undertaken by testing different grid type & size, turbulence model and general flow solver set-up, such that variances between experimental and computational data is minimised. The validation process gives an indication of solution accuracy and the average percentage difference between the computed and theoretical solution over a series of angle-of-attack conditions. The variances can be applied to the aerodynamics of the final solution based on the magnitude obtained from the validation process for feasibility analysis.
The validation process has been addressed in previous anlaysis4 and is still under development for evaluation. Previously, flow transition from laminar to turbulent was manually introduced into the solver based on experimental set up. A two-zonal fluid grid system was implemented, with separate regions duplicating laminar and turbulent conditions based on pre-defined tripping point from the experimental set up.4 Acceptable lift and drag variance between wind-tunnel and computational data was established with variances of 3 & 4% respectively over a linear angle-of-attack range.4 The model failed to predict high-lift flows, thus the use of Detached Eddy Simulation to address this is currently under investigation. The need to incorporate an automatic boundary layer transition prediction methodology, for airfoil optimisation is also an area for investigation.
Optimisation Algorithm
An intelligent search agent forms the final part of the DNO structure. The optimizer type is dependent on the topology of the formulated objective function. The choice further affects the efficiency of the model with regards to the computation time taken to converge to a solution. The number of design variables used to define the problem effects computational resources. Gradient methods converge quickly to a solution and are ideal for simple topologies where the objective function is convex. In multimodal problems, a gradient method is undesirable and can be trapped within the local minima, due to the presence of multiple peaks and troughs in the design space. The solution starting point must be well defined in order to address this issue. In multi-objective airfoil optimisation problems, estimating a solution initialisation point must be avoided. Namgoog examined, utilising three different airfoils as base points in the gradient search process.11 The available search space hence, the flexibility of the optimiser was affected with certain base sections.11 Thus, the solution initialisation point needs to be clearly defined for gradient search agents.
Stochastic algorithms offer greater search flexibility, but at a higher computational cost. They can overcome the deficiencies associated with gradient methods by avoiding local minima regions and are ideal for complex and multi-dimensional problems. Solution starting points is not required, thus the requirement of estimating an initialisation point is avoided. In this study, the Particle Swarm Optimisation (PSO) methodology developed by Eberhart and Kennedy12 is used. The model is based on the social behavior of animals with an analogy drawn to a swarm of bees or birds operating in large groups. Each particle within the swarm represents a solution to the problem. As the particles navigate about the design space, it communicates the position by a pre-defined, methodology with the remaining particles within the swarm. A particle with the best fitness is identified as a leader, with the remaining agents updating their positions to follow the leader. The update process operates iteratively until convergence. A validation study was undertaken to determine the sensitivity of the variables controlling the search process over a series of mathematical functions.9 The model is robust and capable of locating an optimum solution over the proposed test functions.9 The study further concluded that an adaptive inertia weight scheme, that provides local search pattern at the start of the iteration process and global as the search region becomes narrow, developed by Qin et. al1 provides the best results. Also, the velocity of the particles navigating through the search region must be low in order to avoid particles overshooting areas of interest.9 Due to the integration of a high order Reynolds Average Navier Stokes (RANS) model within the DNO structure, together with a moderate PSO swarm size for solution representation, the computational time will be excessive. Duvigneau et. al. showed reduction in CPU hours of an optimisation run, through the

Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
23rd Bristol International Unmanned Air Vehicle Systems Conference
6
integration of an Artificial Neural Network (ANN) with Genetic Algorithms as a search agent, to accelerate the computation process.13 Greenman examined the effect of varying CFD training population data for an ANN in the design optimisation of high-lift airfoils.14 The training sample size was minimal in comparison to the anticipated solver calls through a direct optimisation approach resulting in computational time merits.14
An ANN structure was developed to model the relationship between PARSEC airfoils as inputs and the equating aerodynamic coefficients as outputs.9 A low order panel method for quick turn around time was used in the feedback loop through the integration of airfoil aerodynamic coefficients as outputs to the system. Solver accuracy is not an issue, as the flexibility of the ANN can be evaluated through test simulations. This involves conducting a verification study, to determine the effectiveness of the model in developing a relationship between user-defined inputs and outputs. Thus, the accuracy of the training data is not a requirement to model the characteristics of the proposed artificial-intelligence model. The development of an ANN structure is at preliminary stages of design, with variations in training sample size and neurons in the hidden layer examined. The model was verified by testing the ability of the model in interpolating the aerodynamics of PARSEC airfoils included within the training sample. The flexibility of the system in extrapolating data excluded from the training size was also established.9
III. Problem Definition Airfoil optimisation based on user defined objectives and constraints are applied in the design process.
The approach with variations is solver and optimiser type are summarised in Table 1. Table 1. Airfoil Shape Optimization Variants
Variant Optimization Model Flow Solver I Direct Search Method – PSO Low Fidelity - Panel Method II PSO with Artificial Neural Networks Low Fidelity - Panel Method III Direct Search Method - PSO High Fidelity - CFD IV PSO with Artificial Neural Networks High Fidelity - CFD
Low and high fidelity solvers are proposed in the design analysis (Table 1). The accuracy of the two
solvers is disparate. Irrespective of the computational model integrated, it can model the characteristics of the objective function. Thus, the character of the proposed objective function will not change due to the fidelity of the solver. Variations in solution accuracy and total computational time for convergence will be evident. A panel method is initially used in the context of this research (Table 1). The lower computational costs provide an avenue to test the robustness, flexibility and validity of the proposed search algorithm. With the optimiser fine-tuned, CFD will be used to accurately compute the performance of the airfoil.
Two optimisation models are proposed in this study. The DNO approach (Fig. 1) and a hybrid methodology comprising of a neural network system, to address the high computational costs of a uni-based DNO structure are presented. In this paper, variant one of the optimisation architecture (Table 1) is executed for a single-objective airfoil shape optimisation study. Geometrical and aerodynamic constraints are applied in the search process. The number of solver calls required for solution convergence, which is a function of particle population size is recorded. The performance measure of the search process is measured by the ability of the model in obtaining a solution that adheres to the stipulated objectives and constraints. Maintaining a low iteration count is further indicative of the search models ability in providing a feasible and computationally efficient solution.
The data obtained from variant I, can be evaluated against the performance of test variant II, within the proposed optimisation test sequence (Table 1). An ANN model coupled with a PSO is proposed. The performance measure of variant II is defined as the ability of the ANN/PSO model, locating an optimal solution with minimal neural network training data. Consistencies in PSO swarm size including objectives and constraints from variant I are further applied. Variants I & II further involve panel method solutions for quick turn around time. This provides an avenue to further examine the robustness of the PSO algorithm and the ANN structure, through variations in solver set-up parameters.
Future research involves the replacement of panel method solvers with high-fidelity CFD methods. The use of distributed computing will be incorporated to address the high computation costs. Even though it is hypothesized, that a PSO/ANN methodology will be superior in comparison to a direct search process,13-17 a uni-based PSO method with a CFD model integrated (variant III from Table 1), will be executed for confirmation. Thus, comparison of results between a direct and hybrid search methodology (variant IV

Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
23rd Bristol International Unmanned Air Vehicle Systems Conference
7
from Table 1) for a mission segment can be undertaken, to equate the advantages of a neural network methodology against a direct search approach. The remaining mission profile segments will be optimised based on the findings of the comparative analysis involving the two search models proposed.
IV. Test Set-Up To establish an optimal planform for an operating condition, a search agent with the following design
features is required: It must integrate a mathematical function for airfoil shape representation; It must integrate a flow solver for airfoil aerodynamic computation; It must handle single-and-multi objective problems. Single-objective problems include the
minimisation or maximisation of the objective function, with multi-objective problems requiring a set of pareto optimal design solutions;
It must handle single-and-multi constraints in both geometrical and aerodynamic format. Geometrical constraints relate to airfoil contour including thickness-to-chord and camber. Each geometrical variable is assigned to a vector of shape function design variables and are set within a minimum and maximum range to define the search space. Aerodynamic constraints include minimisation of drag under fixed lift condition, to the maximization of lift at take-off and/or landing conditions;
It should provide an efficient and intelligent search process methodology to minimise the number of solver calls required, thus resulting in computation time benefits; and
It should be parallelized and be operable on a distributed computing cluster. In this study, the PSO model is implemented and is effective and efficient in solving for single-and-multi objective airfoil shape optimisation problems. The method has been widely used in various applications including electromagnetism18 and its performance is comparable to genetic algorithms and evolutionary programming methods. The algorithm can handle multiple design variables that are characterised with different operating bounds. This leads to a multi-dimensional search domain, with a presence of multiple local minima and the swarm search strategy is ideal for these problems. The optimiser can handle equality and inequality objective functions for single-and-multi objective problems, thus fixed geometry and minimisation or maximisation of drag/lift coefficients can be applied. The search capability of the model is dependent on user specified particle swarm size, with a large population leading to a computationally demanding run. The method is amendable to parallelization, thus a distributed cluster of nodes can be specified to address this issue. Particle Swarm Optimisation
The optimization in initiated through the random dispersion of the particles with each variable n, set within a domain of minimum and maximum limit. The position ],...,2,1),([ ,...,2,1 mixxxx iniii == and velocity ],...,2,1),([ ,...,2,1 mivvvv iniii == of the individual particles is recorded and solution fitness evaluated and stored )]([ ,...,2,1 gngggbest PPPP = . A particle with the ‘best’ global solution, ,'' gbestP from the population,
is recorded and the remaining particles update their position and velocity to follow gbestP over the
subsequent iterations until solution convergence.18 At each iteration ,''k the search direction is refined by updating the position, ,)'1(' +kxi and velocity, ,)'1(' +kvi (Eqs. 1-2) of the particles, with convergence occurring when the personal best of all particles are within a set threshold of one another. Table 2 summarizes the set-up of the PSO model.
)1()()1( ++=+ kvkxkx iii (1) ))(.(.))(.(.)(.)1( 21 kxPrandckxPrandckvwkv igiiii −+−+=+ (2)

Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
23rd Bristol International Unmanned Air Vehicle Systems Conference
8
Flow Solver
The Potential Flow around Airfoils with Boundary Layer Coupled One Way (PABLO), panel method program is used to compute the aerodynamic coefficients.19 The method uses the Thwaites’ equations to model the laminar region and Heads’ equations to model the turbulent part of the flow. The onset of flow transition and eventual separation is based on Michel’s transition criteria. The total drag coefficient over the lifting surface is analysed using the Squire-Young formula.20 Formulation of Constraints & Objective Function
The PARSEC variables (Fig. 3) are used to impose geometrical constraints on the model (Table 3) with the PSO model directly adjusting these variables. The application of constraints has a great impact on the feasibility of the final solution. Dimensional search space is restricted through the enforcement of operating variable design limits thus, an optimal solution within a constrained model, may represent a local minima and not necessarily the overall best solution. As each variable is characterised by different operating bounds / dimensions, the presence of multiple solutions, thus local minima are likely to be present. An optimal solution to a constrained model may lie on the intersection of hyper-surfaces of the different PARSEC variables and the solution is optimal for the specified constrained configuration only.
Application of constraints can be computationally demanding. Geometrical constraints are not
susceptible to this, as the design limits (Table 3) ensure that airfoils are generated according to user specified condition. The computational time take to process an airfoil based on the eleven variables is almost negligible. The application of aerodynamic constraints which forms the objective function (Eq. 3), poses computational issues, due the requirement of executing a time demanding CFD run to confirm the validity of the stipulated condition. The stricter the imposed constraint, the heavier the computational run
Table 2. Particle Swarm Optimizer Test Set-Up
PSO Model APSO1
Scaling Factors: Cognitive & Social (c1 & c2) 21 =c 22 =c
Swarm Population 40 Number of Dimensions (PARSEC Variables) 10
Inertia Weight (w) ε+−
−=
gjij
ijijij pp
pxISA
0.3 where;1
11 =⎟⎟⎠
⎞⎜⎜⎝
⎛
+−=
−αα
ijISAije
w
Maximum Velocity (Vmax) 0.1 – 10% of maxmax1 ,, nλλ K
Convergence Criteria 01.0<− bestibestg PP
Table 3. PARSEC Airfoil Geometrical Constraints
Variable Number Variable Name Variable Notation Lower Bound Upper Bound 1 Upper Crest Abscissa XUP 0.30 0.60 2 Upper Crest Ordinate YUP 0.07 0.12 3 Upper Crest Curvature YXXUP -1 0.2 4 Lower Crest Abscissa XLOW 0.20 0.60 5 Lower Crest Ordinate YLOW -0.12 -0.07 6 Lower Crest Curvature YXXLOW 0.2 1.20 7 Leading Edge Radius RLE 0.001 0.04 8 Trailing Edge Ordinate YTE -0.02 0.02 9 Trailing Edge Wedge Angle βTE 3° 40°
10 Trailing Edge Direction αTE -25° -2° 11 Trailing Edge Thickness ∆YTE 0 0

Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
23rd Bristol International Unmanned Air Vehicle Systems Conference
9
becomes. For example, the condition of maintaining laminar flow and/or avoiding flow separation, in the design of long endurance airfoils, is computationally demanding with direct search methods. This re-enforces the need to develop an intelligent search agent to address this issue.
A single-objective, constrained optimisation run is executed. Together with the imposed geometrical constraints (Table 3), additional aerodynamic limits are applied to define the problem. The objective function f, takes the following mathematical form:
∑=
= q
i iiil
iiid
MCMC
f
1 ),Re,(),Re,(
1
αα
Where:
tCoefficienLift CtCoefficien Drag
Condition Operating
l ==
=
dCq
NumberMach M
Number Reynolds ReAttack-of-Angle
===α
(3)
The specified geometrical and aerodynamic constraints are related and used to define the optimisation problem as:
)(min xfi
Subject to: ikik
ijij
ctcx
adxa
21ik )(g
,)(
<<=
=
qikqij
K
K
,2,1,2,1
==
iCondition Operatingat t,Constraint lGeometrica Inequality sConstraint ofNumber q
)ad t,CoefficienLift Fixed (i.e. iCondition Operatingat Constraint cAerodynamiEquality )(aVariablesDesign PARSEC ofVector ;],,[
Condition Operatingan at Function Objective ofon Optimisati :
ijij
1021
==
====
ik
xxxxx
fwhere
i
K
The PSO adjusts the PARSEC variables and the coordinates integrated into the flow solver to compute
the aerodynamic performance of the airfoil. The coefficients are used to establish the magnitude of the fitness function, with the process operating iteratively until convergence based on user specified termination criteria (Table 2) is satisfied.
The optimisation run executed aims to minimise the drag coefficient, with fixed lift coefficient under steady cruise condition. Strict thickness-to-chord limits based on minimum wing volume requirements are specified. The remaining PARSEC variables are relaxed to allow the PSO to explore the best possible combination. The problem is set up as follows:
0.24t0.14 0.32 Mach
100.6Re
2
4.0C :Subject toC min
6
l
d
≤≤=×=
=
=oα (4)

Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
23rd Bristol International Unmanned Air Vehicle Systems Conference
10
V. Results and Discussion As PSO is a probabilistic search method, two
independent runs were executed to observe solution convergence. The convergence fitness and the final optimal airfoil shapes are presented in Figures 4 & 5 respectively. It can be seen that the two runs, produce different history plots (Fig. 4), but reach the same objective function. The fitness magnitude difference between the two runs is negligible on the final aerodynamics (Table 4). Convergence of run 1 takes 56 iterations, while simulation 2 requires 38 generations. Considering that a moderate swarm size of 40 particles was selected, this equates to 2240 and 1520 airfoils that were computed by the panel method respectively over the two runs. Due to the low computational cost of panel method solvers, computation time was not an issue. Integration of CFD method for similar optimisation runs will pose problems.
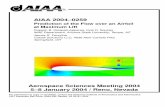
Figure 5 shows two different optimal shapes,
with similar lift-to-drag performance (Table 4). Notable differences between the two coefficient of pressure distribution plots, over the two optimisation simulations is present (Fig. 6). The results indicate that a multimodal behavior is present for single-objective airfoil shape optimisation problems, which was also confirmed by Ray.21 Thus, multiple airfoils exist for the stipulated objective function and stricter constraints need to be enforced in order to select one planform. Examination over multiple flight conditions including enforcing aerodynamic constraints of maintaining laminar flow and/or avoiding flow separation must be applied. Due to the presence of multiple solutions, total iteration count for convergence also varies as a result (Fig. 4).
Particle convergence towards an optimal solution is represented through a series of box plots (Fig. 7). The ten PARSEC variables were mapped at the start and end of the iteration run to show convergence. The initial swarm covers a large design search range, thus indicating the exploration of all possible permutations. The final swarm indicates that the particles have converged to a specific value with a decrease in the Inter Quartile Range (IQR).
0 10 20 30 40 50 600.5
1
1.5
2
2.5
3
3.5
4
4.5x 10
-3
Iterations
Fitn
ess
PSO Progress Plot
Run 1Run 2
Figure 4. Convergence Plot
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
x/c
y/c
Final Optimial Shape
Run 1Run 2
Figure 5. Final Optimal Airfoil Shape
Table 4. PSO Execution Results
Fitness t/c Cl Cd Cl / Cd
Run 1 41010.6 −× 23.57% 0.40 0.0067 ≈ 60 Run 2 41060.6 −× 21.71% 0.40 0.0065 ≈ 61
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1.5
-1
-0.5
0
0.5
1
x.c
CP
Coefficient of Pressure Distribution of Final Optimal Shapes
Run 1Run 2
Figure 6. CP plots of the Optimal Shapes

Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
23rd Bristol International Unmanned Air Vehicle Systems Conference
11
Comparison of median values between the initial and final swarm, is compared against the
converged PARSEC airfoil from Figure 5 (Table 5). The median does not represent the overall best solution, but equates to the evolution of the
particles within the swarm. The values at the start of the search phase are different in comparison to the final swarm. The large difference between the two indicates the exploration of the entire test domain, a conclusion which is supported by the box plots in Figure 7. In most cases, the median of the final swarm shifts towards the optimal value, thus suggesting particle evolution towards the region bounded by the global solution.
10987654321
1.5
1.0
0.5
0.0
-0.5
-1.0
PARSEC Design Variable
Des
ign
Var
iabl
e M
agni
tude
Boxplot of Initial and Final Swarm
Figure 7. Box Plot of Initial and Final Swarm (Run 2)
Table 5. PARSEC Variables Swarm Convergence (Run 2)
Median PARSEC Variable Variable Notation Initial Swarm Final Swarm Optimal Value
1 XUP 0.4586 0.4908 0.5110 2 YUP 0.09645 0.1103 0.1135 3 YXXUP -0.3544 -0.34 -0.7273 4 XLOW 0.4087 0.4955 0.4910 5 YLOW -0.092 -0.1069 -0.1037 6 YXXLOW 0.70415 1.06 0.9696 7 RLE 0.01915 0.0314 0.0239 8 YTE -0.0015 -0.0055 -0.0102 9 βTE 0.4045 (23.18°) 0.6723 (38.52°) 0.6860 (39.25°)
10 αTE -0.2675 (-15.33°) -0.2477 (-14.20°) -0.1438 (-8.24°)

Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
23rd Bristol International Unmanned Air Vehicle Systems Conference
12
VI. Concluding Remarks In this paper, the method for airfoil shape optimisation was presented. The direct search
approach over the inverse method was proposed. The transformation of design goals into a set of velocity profiles, does not guarantee a realistic airfoil; a characteristic of the inverse approach, thus the direct method was adopted. The sub-systems of the direct approach were identified. The PARSEC shape function that utilises eleven variables, to generate various classes of airfoils was used. Aerodynamic computation through the use of two flow solvers was identified. The aim of this paper was to test the feasibility of the direct approach and not the accuracy of the aerodynamics. Thus, for quick turn-around time, a low order panel method was used. The method provides an avenue to validate the proposed optimisation structure, before computationally demanding CFD runs are applied.
Two optimisation approaches within the direct method were identified. A swarm search algorithm coupled directly to a flow solver was one approach. Second option includes de-coupling the flow solver and integrating a trained neural network to the search agent. A single-objective airfoil shape optimisation problem was defined and included minimising the drag coefficient at fixed lift coefficient. Series of geometrical constraints were applied, to address minimum wing volume for fuel storage requirements. Panel method calculations showed that a direct optimisation run can be computationally demanding. A swarm comprising of 40 particles, converged to an optimal solution in 38 and 56 iterations. This equates to 1520 and 2240 airfoil solver calls respectively. A CFD solver takes approximately 30-40 minutes of CPU time for one airfoil, thus the direct approach for airfoil optimisation, with high-fidelity solvers is unacceptable.
To address the high computation costs, current research focuses on developing and validating an ANN model. The model will be developed through a panel method solver and executed using the swarm algorithm. The results will then be compared against the data provided in this paper, over the same objective function and geometrical constraints. Once the methodology is validated, a CFD solver will be implemented to address solution accuracy. The use of parallel computing is expected to address the time constraints of this method.

Multi Mission Re-Configurable UAV – Airfoil Optimization through Swarm Approach and Low Fidelity Solver
23rd Bristol International Unmanned Air Vehicle Systems Conference
13
References 1Qin, Z., Yu, F., Shi, Z. and Wang, Y., "Adaptive Inertia Weight Particle Swarm Optimization," ICAISC, 2006, pp. 450-459. 2Sinha, A. K., "A Systems Approach to the Issues and Challenges of UAV Systems," 2001, pp. 1-5. 3Matsushima, K. and Iwamiya, T., "Aerodynamic Shape Design of Wings using an Inverse Problem Approach," High-Performance Computing on the Information Superhighway, Seoul, Korea, 1997, pp. 271-276. 4Khurana, M., Sinha, A. and Winarto, H., "Multi-Mission Re-Configurable UAV - Airfoil Analysis through Shape Transformation and Computational Fluid Dynamics," Twelfth Australian International Aerospace Congress - Second Australasian Unmanned Air Vehicles Conference, 2007, pp. 1-22. 5Khurana, M., Sinha, A. and Winarto, H., "Multi-Mission Re-Configurable UAV - Airfoil Shape Parameterisation Study," 22nd International Unmanned Air Vehicle Systems Conference, Bristol, 2007, pp. 1-15. 6Khurana, M., Sinha, A. K. and Winarto, H., "Multi-Mission Re-Configurable Unmanned Aerial Vehicle - Airfoil Optimisation Architecture," International Conference on Engineering Technology, Kuala Lumpur, Malaysia, 2007, pp. 10. 7Khurana, M., Winarto, H. and Sinha, A., "Airfoil Geometry Parameterization through Shape Optimizer and Computational Fluid Dynamics," 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 2008, pp. 18. 8Sobieczky, H., "Parametric Airfoils and Wings," Numerical Fluid Dynamics, Vol. 68, 1998, pp. 71-88. 9Khurana, M., Winarto, H. and Sinha, A., "Application of Swarm Approach and Artificial Neural Networks for Airfoil Shape Optimization," 12th AIAA/ISSMO Multidisciplinary Analysis and Optimisation, Victoria, British Columbia, Canada, 2008, 10John D. Anderson, J., Fundamentals of Aerodynamics, 4th, McGraw-Hill Series in Aeronautical and Aerospace Engineering, New York, 2005. 11Namgoog, H., "Airfoil Optimization of Morphing Aircraft," PhD, Aerospace Engineering, Purdue, Indiana, 2005. 12Kennedy, J. and Eberhart, R., "Particle Swarm Optimization," IEEE International Conference on Neural Networks, Perth, Australia, 1995, pp. 1942-1948. 13Duvigneau, R. and Visonneau, M., "Hybrid Genetic Algorithms and Neural Networks For Fast CFD-Based Design," 9th AIAA/ISSMO Symposium on Multidisciplinary Analysis and Optimization, Atlanta, Georgia, 2002, pp. 633-643. 14Greenman, R. M. and Roth, K. R., "Minimizing Computational Data Requirements for Multi-Element Airfoils Using Neural Networks," Journal of Aircraft, Vol. 36, No. 5, 1999, pp. 777-784. 15Hacioglu, A., "Fast Evolutionary Algorithm for Airfoil Design via Neural Network," AIAA Journal, Vol. 45, No. 9, 2007, pp. 2196-2202. 16Ross, J. C., Jorgenson, C. C. and Norgaard, M., "Reducing Wind Tunnel Data Requirements Using Neural Networks," NASA Technical Memorandum, 1997. 17Rai, M. M. and Madavan, N. K., "Application of Artificial Neural Networks to the Design of Turbomachinery Airfoils," 36th Aerospace Sciences Meeting & Exhibit, Reno, NV, 1998, 18Robinson, J. and Rahmat-Samii, Y., "Particle Swarm Optimization in Electromagnetics," IEEE Transactions on Antennas and Propagation, Vol. 52, No. 2, 2004, pp. 397-407. 19Wauquiez, C., "Potential Flow around Airfoils with Boundary Layer coupled One-way (PABLO)," KTH - The Royal Institute of Technology, Department of Aeronautics, 1999. 20Katz and Plotkin, Low Speed Aerodynamics, from Wing Theory to Panel Methods, McGraw-Hill Inc, 1991. 21Ray, T. and Tsai, H. M., "Swarm Algorithm for Single-and Multiobjective Airfoil Design Optimization," AIAA Journal, Vol. 42, No. No. 2, 2004, pp. 366-373.
Copyright © 2022 FDOKUMEN