
Minimizing the average cost of paging under delay constraints
19
Transcript of Minimizing the average cost of paging under delay constraints

Minimizing the Average Cost of Paging Under DelayConstraintsC. Rose & R. YatesOctober 31, 1997Department of Electrical and Computer EngineeringRutgers UniversityPO Box 909Piscataway NJ 08855email: [email protected], [email protected]�cient paging procedures help minimize the amount of bandwidth expended in locating amobile unit. Given a probability distribution on user location, it is shown that the optimalpaging strategy which minimizes the expected number of locations polled E[L] is to query eachlocation sequentially in order of decreasing probability. However, since sequential search overmany locations may impose unacceptable polling delay, D, optimal paging subject to delayconstraints is considered. It is shown that substantial reductions in E[L] can be had even aftermoderate constraints are imposed on acceptable D (i.e., D � 3).Since all methods of mobility management eventually reduce to considering a time-varyingprobability distribution on user location, this work should be applicable to a wide range ofproblems in the area. most notably those with additive cost structures.
1

1 IntroductionPaging and registration are necessary features of wireless communication networks be-cause user locations vary as a function of time. Since paging and registration imposeburdens on both the switching system and radio resources[1, 2, 3], some e�ort has beendevoted to minimization of their use [4]-[11]. However, minimization of paging and reg-istration consists of several distinct fundamental problems. Former work has blendedthese problems and therefore obfuscated them slightly.Speci�cally, optimal paging and registration, whether explicitly stated or not, is pred-icated on location estimation based on some notion of user location probability. It there-fore makes sense to explicitly separate the paging, registration, and probability distribu-tion estimation problems. Three basic questions result:1. Given a probability distribution, what is the least average amount of e�ort nec-essary (number of locations searched) to �nd a user? What is the e�ect of delayconstraints?2. Given a time-varying distribution known both by the user and the system, whatare the optimal paging procedures based on information available at the mobile?I.e., location-based, timer-based or "state" based registration/paging.3. How can these time-varying location probabilities be e�ciently estimated based onmeasurement and/or models of user motion?In this paper we consider the problem of item 1 and derive optimal and near-optimalpaging strategies for minimizing the average number of locations (base-stations) whichmust be polled. We assume that some probability distribution on user location can beprovided either through measurement or analysis of motion models. Even for a uniformdistribution where the user is equally likely to be anywhere in the coverage area, reduc-tions of at least 50% can be had in the average number of locations polled. For otherdistributions the improvement is larger. Of course, the improvement comes at the cost ofincreased delay; i.e., not all locations are polled at once. However, even under relativelystrong delay constraints, substantial improvements can still be had.This work provides a foundation for studying the joint optimization of paging andregistration [12, 13] as well as motivation for future work addressing question 3.2 OverviewAfter formally specifying the problem and establishing some general results, we considerthe minimization of mean locations polled without a delay constraint. It is shown that2

sequential polling in decreasing order of probability minimizes this mean. Then, delayconstraints are introduced; i.e., maximum and mean constraints are imposed on thenumber of polling events. The maximum constraint and weighted mean cases can besolved via dynamic programming. However, minimization subject to a mean constraintis not amenable to dynamic programming solution. Therefore, a continuous formulationis developed so that variational [14], [15] principles can be applied. The continuousformulation can also be used to approximately solve the maximum and weighted delayproblems. We then apply the results to a simple location probability distribution whicharises for a number of motion models and to the worst-case uniform distribution.3 Preliminaries3.1 De�nitions and Problem FormulationWe enumerate the paging locations by 1; 2; : : : such that the user is at location i withprobability pi. We can associate a user location with a random variable X such thatPfX = ig = pi.Location areas are disjoint sets of locations whose members are to be polled simulta-neously Let An be the set of location indices covered by location area n. The subscript ndenotes the order in which the location areas will be searched so that a polling strategyA is an ordered sequence (A1; A2; : : :) of location areas to be paged. We will use kn todenote the cardinality of An.The probability of a user residing in location area An is thenqn = Xi2An pi (1)If the user is found in location area An, then the number of locations searched to �ndthe user is sn = nXj=1 kj (2)Therefore, we can now de�ne the cost of paging, L, as the number of locations searchedto �nd the user. We observe that PfL = sng = qn and thatE[L] = 1Xn=1 snqn (3)Since all locations within a location area are polled simultaneously, the paging delayD equals number of location areas searched before the user is found. We note that3

PfD = ng = qn and that E[D] = 1Xn=1nqn (4)Our basic problem will be the minimization of E[L] subject to constraints on D orE[D] over the set of polling strategies.3.2 General ResultsWe �rst establish the following results. Proofs are deferred until Appendix A.Theorem 1 To minimize E[L] or E[D], more probable locations must not be searchedafter less probable locations. Formally, if i and j are locations with pi > pj, then thelocation area sequence (A1; A2; : : :) that minimizes either E[D] or E[L] must satisfy i 2 Aland j 2 Am for some l � m.Since the ordering of locations within a location area An does not a�ect L or D,Theorem 1 implies that we need only consider orderings of the location distribution fpigwhich are decreasing. We de�ne random variable X to be a location random variable(LRV) if X takes on values from the positive integers and PfX = ig � PfX = i+ 1gfor all i � 1. The remainder of this work will consider only the paging problem for whichthe user location X is speci�ed by an LRV.In addition, Theorem 1 implies that given an LRV X, an optimal paging strategy thatminimizes either E[D] or E[L] is of the formA1 = f1; : : : ; s1g and An = fsn�1+1; : : : ; sng.That is, for the appropriate choice of k1; k2; : : :, we should �rst page the k1 most probablelocations, followed by the next k2 most probable remaining locations and so on. A fewtheorems relating L and D achievable by di�erent distributions follow. We will make useof the following de�nitions:De�nition: Let the complementary distribution function of a random vari-able X be FX(i) = PfX > ig. A random variable X is said to be stochasti-cally greater than random variable Y , written X st> Y , if FX(i) > F Y (i) forall i. Likewise if FX(i) � F Y (i) for all i then X st� Y .De�nition: Let L(X) and D(X) be random variables associated with thepaging cost and delay respectively for a given paging strategy on locationrandom variable X.Theorem 2 Given a paging strategy (A1; A2; : : :) and two location random variables X,Y respectively, if X st> Y then D(X) st> D(Y ) and L(X) st> L(Y ); i.e., increasing stochas-tic order of the location distribution increases the stochastic order of both L and D.4

This result has the following simple corollary.Corollary 1 If X st> Y , then E[L(X)] > E[L(Y )] and E[D(X)] > E[D(Y )].This permits us to �nd the �nite distribution with the poorest performance (maximumE[L] and E[D]) for any given paging strategy.Corollary 2 Given any location area set fAng, the uniform distribution, PfU = ig =1=M for i = 1; : : : ;M , maximizes both L(X) and D(X) over all location random variablesX having at most M non-zero elements. Thus, the uniform distribution a�ords the worstL and D performance of any �nite distribution with M elements.The proof follows directly from Theorem 2 and the following lemma.Lemma 1 Over all location random variables X such that PfX > Mg = 0, the uniformrandom variable U has maximum stochastic order; i.e., U st� X.4 Minimizing Paging Costs4.1 Unconstrained DelayHere we prove that E[L] is minimized by sequential search over the user locations indecreasing order of probability; i.e., kn = 1 for all n. We likewise show that D ismaximized by this choice of the fkng.Theorem 3 For an LRV X, Searching locations sequentially in decreasing order of prob-ability minimizes the expected number of locations searched over all possible choices oflocation area set fAng. Thus,L� = minfsng E[L] = 1Xn=1npn = E[X]Theorem 4 For an LRV X, the ordered sequential paging algorithm of Theorem 3 max-imizes D over all choices of location area set fAng which satisfy An = fsn�1 + 1; sn�1 +2; :::sng; i.e., less probable not searched before more probable. Thus,D� = maxfsng E[D] = 1Xn=1npn = E[X]4.2 Maximum, Weighted and Mean Delay ConstraintsHere we seek to minimize E[L] while �xing the total number of location area sets, N .Notice that in this case the distribution pi must be �nite; i.e., pi = 0, i > M for some5

su�ciently large M . Otherwise there must be some location area set with non-zero qnbut in�nite cardinality kn and E[L] will be in�nite. E[L] may be rewritten asE[L] = NXn=1 snqn (5)and we seek sn which minimize it. It is also possible to add a function which penalizeslarge D by minimizing G = NXn=1(sn + �n)qn (6)where � � 0 is de�ned as the delay weighting factor.Notice that equations (5) and (6) are both linear superpositions of incremental costsof the form �nqn. Thus, using boundary conditions sN = M where M is the numberof nonzero pi and s0 = 0, the problem may be solved numerically using standard �nite-horizon dynamic programming [16].Now consider the problem of minimizing L subject to a constraint on D. Speci�cally,minimize E[L]subject to sn > 0E[D] = D�This problem is not amenable to solution via dynamic programming owing to the con-straint on E[D]; i.e., the total cost is not additive. Speci�cally, although the cost isstill composed of increments depending only on the sn and qn, if the delay constraint isnot met, then we impose an e�ectively in�nite cost for infeasibility. However, we canreformulate all the constrained problems using continuous distributions. The resultingsolutions provide an underbound to the achievable L�, and in addition, o�er a means ofobtaining an approximate solution to the discrete problem.Consider then a non-increasing probability density function g(x) de�ned for 0 � x �X and comparable to the non-increasing discrete distribution. We de�ne L asL = NXn=1 xn Z xnxn�1 g(!)d! (7)where the xn � xn�1 are analogous to the sn for the discrete case and xN = X. Likewise,we de�ne D = NXn=1n Z xnxn�1 g(!)d! (8)As an aside for completeness, notice that we can make the analogy to the discretecase as precise as necessary by setting xn = sn� for some � > 0. Therefore, the discrete6

theorems which relate L and D for various location distributions via stochastic orderingcarry over to the continuous case if we de�ne the appropriate complementary densityfunction �FX(x) = PfX > xgWe can then consider minimizingG = L+ �(D �D�) = L+ �D + constant (9)For minimization with a maximum D constraint we have � = 0. For the weighted meanproblem, � is some constant greater than zero, and for constrained mean problems, � isthe Lagrange multiplier. Di�erentiation of equation (9) with respect to the xn yields,@G@xn = (xn � xn+1 � �)g(xn) + Z xnxn�1 g(!)d! (10)Setting equation (10) to zero yields,(xn+1 � xn + �)g(xn) = Z xnxn�1 g(!)d! (11)Since x0 = 0 and xN = X, this second order di�erence equation has a unique solution[17]. Note that equation (11) may be rewritten as a recursion in xn,xn+1 = xn � �+ 1g(xn) Z xnxn�1 g(!)d! (12)which given �, allows the fxng to be found iteratively via a choice of x1. All that remainsis to determine whether G is convex.Theorem 5 G is convex in x both for � � 0 and when � is the Lagrange multiplierchosen to satisfy equation (11).Thus, through appropriate choice of �, the continuous formulation can be used toperform three di�erent minimizations:� Minimize G subject to Dmax � N� Minimize G with D weighted by � > 0� Minimize G subject to D = D�.4.3 Scaling of Continuous SolutionsSuppose we have obtained a set of optimal xn for a particular probability density functiong(x) and wish to �nd the optimal yn for a scaled density g0(x) = �g(�x). This situation7

arises naturally for Gaussian user location distributions with time-dependent variances.We will show that if x�n is an optimal solution for g(x) then y�n = x�n=� is an optimalsolution for g0(x). We will also show the relationship between the G, L and D achievedby x� and y�.Theorem 6 If x�n minimizes G = L + �D for some probability density function g(x),then y�n = x�n� minimizes G 0 = L0 + ��D0 for a scaled probability function g0(x) = �g(�x).Furthermore, if G(x�) = G� then G 0(y�) = G�=�.5 Application of Results5.1 Unconstrained DWe showed in section 4.1 that for a non-increasing distribution, the minimum achievablemean number of locations searched is the mean of the distribution. For distributionswhich are not non-increasing, the minimum L is the mean of the reordered distribution.The Gaussian distribution, N (0; �2t) is a typical time-varying location probabilitydistribution for systems under isotropic random motion [18]. We used a discretized andtruncated version of the distribution de�ned as,yn = 1erf( Npt�2 ) 2p2�t�2 Z nn�1 e� x22t�2 dx (13)with 1 � n � N . Notice that as t varies from 0 to in�nity, yn varies between a determin-istic and uniform distribution on the N possibilities.Under classical polling strategies, L� = N and D = 1. In FIGURE 1 L� is shownas a function of time for the distribution yn with N = 20 and � = 1. Notice that at alltimes, L� � (N + 1)=2. Thus, optimal polling substantially reduces the average numberof locations searched, even for a uniform distribution, by almost half.However, the unconstrained polling delay D is identical to L� and increases mono-tonically as the distribution approaches uniformity. In the next section we show thatmoderate constraints on D still result in L� reasonably close to those obtainable usingunconstrained D.5.2 The Uniform Distribution and Constrained DWe pursue analytic results for the uniform distribution since,� They are simple to derive in closed form.� As shown in Corollary 2, the uniform distribution supplies an overbound on theminimum E[L] and E[D] of any �nite location random variable distribution.8

10-2
10-1 10
0
101 10
2
103 10
4
105 10
6
Time
0
2
4
6
8
10
12
L*
Figure 1: Minimum paging cost L� for truncated time-varying Gaussian location distri-bution. The polling delay D is unconstrained. N = 20 locations.� Through Corollary 1, a uniform distribution with su�ciently few elements may beused to underbound the minimum E[L] and E[D] of any �nite location randomvariable distribution.Thus, we can begin to understand the behavior of L� and D� for arbitrary distributionsin terms of the uniform distribution.We derive continuous solutions (which underbound the discrete solutions) for max-imum, weighted and mean D constraints. Note that the maximum D and weighted Dsolutions are simply the constrained mean D solution with �xed Lagrange multiplier,�. These solutions will later be compared to their discrete counterparts obtained viadynamic programming.For a continuous uniform distribution de�ned on [0; U ], equation (11) yields,xn+1 � 2xn + xn�1 = ��For n = 1; 2:::N with x0 = 0 and xN = U . we have,xn = �UN + �2N�n� �2n2 (14)Thus, D = NXn=1n � 1N + �2U (N + 1)� n�U � (15)9

0 5 10 15 20Maximum Delay
0
5
10
15
20
L* a
nd D
DL*L* using DPD using DP
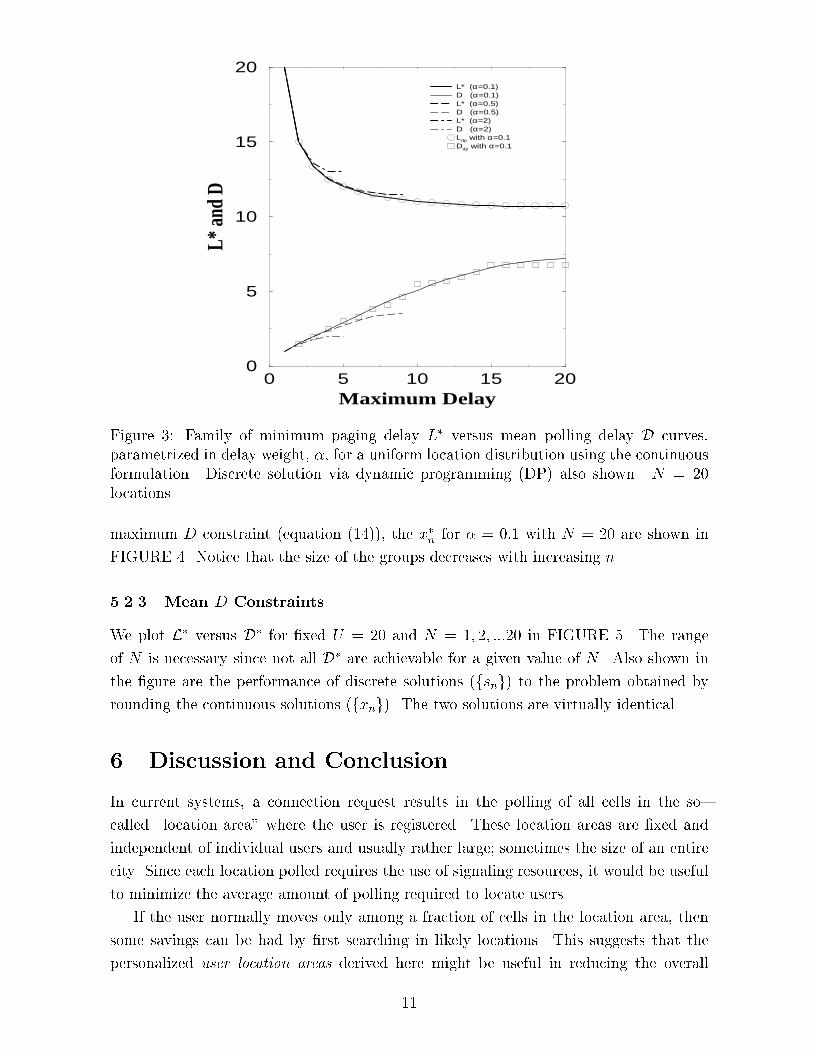
Figure 2: Minimum paging cost L� and mean polling delay D versus maximum delay N ,for a uniform location distribution using the continuous formulation. Discrete solutionvia dynamic programming (DP) also shown. N = 20 locations.L may be then calculated asL = NXn=1n �UN + �2 (N � n)� � 1N + �2U (N + 1)� n�U � (16)For mean constraints we �nd � in terms of D�, U and N as� = (N + 12 �D�) 12UN3 �N (17)5.2.1 Maximum D ConstraintsFor the case of maximum D � N we have � = 0. Thus, xn = nU=N with D = (N +1)=2and L� = U N+12N . In FIGURE 2 we plot L� and D as N ranges from 1 to U for U = 20.Also shown for comparison are the comparable discrete solutions obtained using dynamicprogramming. Notice the relatively close agreement.5.2.2 Weighted D ConstraintsFor the case of weightedD we may plot a family of curves parametrized in �, the weightingfactor. This was done in FIGURE 3 using U = 20 and 1 � N � 20. We also show theclose agreement of typical discrete solutions obtained via dynamic programming for the� = 0:1 case. For comparison to the uniform location area groupings obtained using a10
0 5 10 15 20Maximum Delay
0
5
10
15
20
L* a
nd D
L* (α=0.1)D (α=0.1)L* (α=0.5)D (α=0.5)L* (α=2)D (α=2)Ldp with α=0.1Ddp with α=0.1
Figure 3: Family of minimum paging delay L� versus mean polling delay D curves,parametrized in delay weight, �, for a uniform location distribution using the continuousformulation. Discrete solution via dynamic programming (DP) also shown. N = 20locations.maximum D constraint (equation (14)), the x�n for � = 0:1 with N = 20 are shown inFIGURE 4. Notice that the size of the groups decreases with increasing n.5.2.3 Mean D ConstraintsWe plot L� versus D� for �xed U = 20 and N = 1; 2; :::20 in FIGURE 5. The rangeof N is necessary since not all D� are achievable for a given value of N . Also shown inthe �gure are the performance of discrete solutions (fsng) to the problem obtained byrounding the continuous solutions (fxng). The two solutions are virtually identical.6 Discussion and ConclusionIn current systems, a connection request results in the polling of all cells in the so{called \location area" where the user is registered. These location areas are �xed andindependent of individual users and usually rather large; sometimes the size of an entirecity. Since each location polled requires the use of signaling resources, it would be usefulto minimize the average amount of polling required to locate users.If the user normally moves only among a fraction of cells in the location area, thensome savings can be had by �rst searching in likely locations. This suggests that thepersonalized user location areas derived here might be useful in reducing the overall11

0 5 10 15 20n
0
5
10
15
20
x n
continuousDP
Figure 4: Location area groupings xn obtained using a uniform location distribution anda weighted delay criterion � = 0:1. Continuous and discrete dynamic programming (DP)solutions shown. N = 20 locations.
0 2 4 6 8 10 12D*
6
8
10
12
14
16
18
20
22
24
L*
continuousrounded
Figure 5: Montage of minimum paging cost L� versus �xed mean pollingD� for a uniformdistribution with U = 20 and N = 1; 2; :::20. Both continuous and rounded solutionsshown. 12

signaling load. Of course, such a scheme requires some knowledge of where any particularuser is likely to be. Here, we assume that such a probability distribution on user locationcan be derived from past measurements of user motion1 and possibly stored with userpro�les.Given these assumed probability distributions on the user location, we have derivedoptimal polling strategies which minimize the average number of locations polled, L. Theprocedure which minimizes L, polls locations sequentially in decreasing order of proba-bility and the L achieved is thus the mean of the ordered distribution, L�. If we assumethat each polling event requires unit time, then the mean polling delay D is equal to L�.We also found that the uniform distribution achieved the worst performance (maximumL� and D) of any distribution with the same number of non-zero elements. In addition, auniform distribution with fewer elements can be used to overbound performance as well.Thus, the uniform distribution is a useful surrogate for understanding the behavior ofarbitrary distributions.For large numbers of location areas, D = L� may be unacceptably large. We thereforealso considered the problem of minimizing L under constraints on D. Problems such asconstraining the maximum delay or weighted average delay can be solved exactly usingdynamic programming (DP). Problems involving constraints on the mean delay, however,are not amenable to DP solution. However, a continuous formulation which may beapplied to all the constrained D cases was derived and variational techniques applied.The solution to the continuous problem overbounds the best performance of any discretesolution since the discrete solution is a subset of possible continuous solutions.It was found that the discrete solutions obtained by rounding the continuous solutionslie close to this bound. Thus, the analytically tractable continuous formulation seems toprovide a good approximate solution to the discrete case. The uniform distribution is es-pecially tractable and, as previously mentioned, serves as an underbound on performanceover all �nite distributions of the same length. The uniform distribution was thereforeused as a worst case to illustrate the gains possible using optimal paging strategies.In the continuous case, it is generally seen that L�, the average number of locationspolled declines rapidly with D the average number of polling events. This result impliesthat near-optimum L� can be obtained even under relatively severe constraints on D.Speci�cally, for the uniform distribution of 20 elements, the unconstrained minimum L�is 10:5. However, even when a mean polling delay of D� = 2 is required, L� = 13 canstill be achieved.It is also noteworthy that the scaling properties of the continuous solutions implies1The measurements might come speci�cally from the user in question or might be compiled from anaggregate of users with similar motion characteristics. Estimation of location probability distributionsis the subject of current work. 13

that the relative L� remains virtually constant under �xed delay constraints. For example,with D = 2 we can achieve L� = 13 for U = 20. For a distribution with U = 200 we canexpect through application of Theorem 6 that L� = 130 with the same D = 2. Since theabsolute minimum L for U = 200 is 100:5, the relative L� of the absolute minima areroughly equal.In conclusion, for cases where the system need not �nd the user immediately, theoptimal paging strategies presented here a�ord a means to signi�cantly reduce the av-erage amount of signaling necessary to locate a user, while maintaining modest averagepolling delay D. This work is applicable to any and all types of user motion for which aprobability distribution on location can be measured or derived. In addition, since not alllocations are polled simultaneously, a parallel search for multiple users can be mountedthereby increasing the potential paging rate and/or reducing the overall system pagingdelay. These ideas are the subject of current investigations.AcknowledgementsThe authors would like to thank David Goodman of the Wireless Information NetworkLaboratory (WINLAB) at Rutgers University for bringing the problem of location areamanagement to the attention of the authors. We would also like to thank Uzi Timor,Zhuyu Lei and Sudarshan Rao of Rutgers University, WINLAB for interesting discussions.
14

A ProofsProof: Theorem 1 Suppose the set (A1; A2; : : :) is optimal but there exists i 2 Al andj 2 Am with pi < pj but l > m. Let (A01; A02; : : :) denote a new paging sequence derivedfrom (A1; A2; : : :) in which i and j are swapped so that i 2 A0m and j 2 A0l. For themodi�ed paging sequence, we de�ne the paging cost and paging delay by L0 and D0. Wenote that E[D]� E[D0] = lpi +mpj � (lpj +mpi)= (l �m)(pi � pj)> 0This is a contradiction of the assumed optimality of fAng. Likewise for E[L] we haveE[L]� E[L0] = slpi + smpj � (slpj + smpi)= (sl � sm)(pi � pj)> 0which also contradicts the assumed optimality. 2Proof: Theorem 2 First, we verify that D(X) st> D(Y ) sincePfD(X) > ng = PfX > sng > PfY > sng = PfD(Y ) > ngGiven l � 1, there exists n such that sn � l < sn+1, so thatPfL(X) > lg = PfX > sng > PfY > sng = PfL(Y ) > lgThus, L(X) st> L(Y )2Proof: Corollary 1 Let X = fxig st> Y = fyig be two di�erent distributions over anindex set A = faig with ai � ai+1. We haveE[A(X)] = 1Xn=1(an � an�1)FX(n� 1) > 1Xn=1(an � an�1)F Y (n� 1) = E[A(Y )]Thus by Theorem 2 we must have E[D(X)] > E[D(Y )] and E[L(X)] > E[L(Y )] sinceD(X) st> D(Y ) and L(X) st> L(Y ). 2Proof: Lemma 1 Suppose X has distribution PfX = ig = pi with pi � pi+1 and15

at most M non-zero elements and such that FX(i) > FU(i) = 1 � i=M for some i 2f1; : : : ;Mg. Let i1 be the �rst such i. Since FX(i1�1) � FU(i1�1) we have pi1 < 1=M .Since pi is decreasing, pi < 1=M for all i � i1. Thus, FX(i1) = PMj=i1+1 pj < (M� i1)=M ,which is a contradiction. 2Proof: Theorem 3 We have E[L] = P1n=1 snqn. If we search Ar = fr`j` = 1; : : : ; krgsequentially, the paging cost becomesE[L0] = Xn6=r snqn + krX̀=1(sr�1 + `)prl� Xn6=r snqn + (sr�1 + kr) krX̀=1 prl= E[L]Thus, sequential search always reduces E[L], and by Theorem 1, the optimal sequentialsearch is in order of decreasing probability. 2Proof: Theorem 4 Suppose a set fAng maximizes E[D] and kr > 1. We have E[D] =P1n=1 nqn. If the set Ar is searched sequentially then E[D] becomesE[D0] = r�1Xn=1nqn + kr�1X̀=0 (r + `)pr`+1 + 1Xn=r+1(n+ kr � 1)qn= 1Xn=1nqn + kr�1X̀=0 `pr`+1 + 1Xn=r+1(kr � 1)qn� 1Xn=1nqn= E[D]Thus, sequential search maximizes D. 2Proof: Theorem 5 The second partials of G are@2G@xi@xj = 8>>>>><>>>>>: (xi � xi+1 � �)dg(xi)dxi + 2g(xi) j = i�g(xi) j = i+ 1�g(xi�1) j = i� 10 otherwise (18)Given x and y, let z(�) = �x+ (1� �)y. We will show that G(z(�)) is convex in � over0 � � � 1 for all admissible x, y.22It is easily shown that if x and y are admissible (i.e., xn � xn+1 and yn � yn+1) then z is admissibleas well. 16

Let � = x� y so that z = ��+ y. We then have@2G(z)@�2 = NXi;j=1 @2G(z)@xi@xj�i�j (19)Using equation (18) we obtain,@2G@�2 = NXi=1 @2G(z)@x2i �2i + 2 N�1Xi=1 @2G(z)@xi@xi+1�i�i+1= NXi=1(zi � zi+1 � �)g0(zi)�2i + 2 NXi=1 g(zi)�2i � 2 N�1Xi=1 g(zi)�i�i+1= NXi=1(zi � zi+1 � �)g0(zi)�2i + g(z1)�21 + g(zN)�2N+ N�1Xi=1 g(zi)(�i ��i+1)2 (20)For � � 0 we have zn � zn+1 � � � 0 which implies that @2G@�2 � 0 and G is convex when� � 0. The same holds true for � chosen to satisfy equation (11) owing to the positivityof g(). 2Proof: Theorem 6 For optimality of yn we examine@G 0@yn = (y�n � y�n+1 � �� )g0(y�n) + Z y�ny�n�1 g0(!)d! (21)Substitution of x�n� for y�n and �g(�z) for g0(z) yields,@G 0@yn = (x�n � x�n+1 � �)g(x�n) + Z x�n�x�n�1� �g(�!)d!Letting ! = z=� yields@G 0@yn = (x�n � x�n+1 � �)g(x�n) + Z x�nx�n�1 g(z)dz (22)which is identically zero owing to the assumed optimality of x�. Thus, y�n = x�n� optimizesG 0(y�) = L(y�) + ��D0(y�)Now, by analogy to the reduction of the integral term in equation (21) to that inequation (22) and the de�nitions of L and D from equations (7) and (8), we can see thatL0(y�) = L(x�)=�. Likewise, D0(y�) = D(x�). Thus, G 0(y�) = G(x�)=� 217

References[1] K.S. Meier-Hellstern, G. P. Pollini, and D. J. Goodman. Network protocols forthe cellular packet switch. IEEE Transactions on Communications, 42(2{4/2):1235,1994.[2] K.S. Meier-Hellstern, E. Alonso, and D. O'Neil. The use of SS7 and GSM to supporthigh density personal communications. In Proceedings of the International Confer-ence on Communications ICC'92, 1992.[3] R. Thomas, H. Gilbert, and G. Mazziotto. In uence of the movement of the mobilestation on the performance of a radio cellular network. In Proc. 3rd Nordic Seminar,September 1988. Paper 9.4.[4] H. Xie, S. Tabbane, and D. J. Goodman. Dynamic location area management andperformance analysis. In Proc. of IEEE Vehicular Technology Conference, 1993.[5] S. Tabbane. Comparison Between the Alternative Location Strategy and the Clas-sical Location Strategy. WINLAB Technical Report no. 37, 1992.[6] A. Bar-Noy and I. Kessler. Tracking mobile users in wireless networks. In INFO-COMM'93, pages 1232{1239, March 1993. San Francisco, CA.[7] S. Tabbane. Evaluation of an Alternative Location Strategy for Future High DensityWireless Communications Systems. WINLAB Technical Report no. 51, January1993.[8] G. Pollini and S. Tabbane. The Intelligent Network Signaling and Switching Costof an Alternative Location Strategy Using Memory. In IEEE VTC'93, May 1993.Seacaucus, NJ.[9] J.Z. Wang. A Fully Distributed Location Registration Strategy for Universal Per-onsal Communication Systems. IEEE J. SAC, 11(6):850{860, August 1993.[10] S. Okasaka, S. Onoe, S. Yasuda, and A. Maebara. A New Location Updating Methodfor Digital Cellular Systems. In IEEE VTC'91, pages 345{350, May 1991. Denver,CO.[11] B. Awerbuch and D. Peleg. Concurrent Online Tracking of Mobile Users. In Proc.ACM SIGCOMM Symposium on Communication, Architecture and Protocols, Oc-tober 1991.18

[12] C. Rose. Minimizing the average cost of paging and registration: A timer-basedmethod. WINLAB-TR 83, WINLAB, Rutgers University, December 1994. (submit-ted for publication).[13] C. Rose. State-based paging/registration: A greedy technique. WINLAB-TR 92,WINLAB, Rutgers University, December 1994. (submitted for publication).[14] D. P. Bertsekas. Constrained Optimization and Lagrange Multiplier Methods. Aca-demic Press, San Diego, CA, 1982.[15] F.B. Hildebrand. Advanced Calculus for Applications. Prentice Hall, EnglewoodCli�s, NJ, 1976.[16] D. P. Bertsekas. Dynamic Programming. Prentice Hall, Englewood Cli�s, NJ, 1987.[17] G.F. Simmons. Di�erential Equations with Applications and Historical Notes.McGraw-Hill Book Company, New York, NY, 1972.[18] A. Papoulis. Probability, Random Variables, and Stochastic Processes. McGraw-Hill,New York, 1965.
19




















