Integrated conditional global optimisation for discrete fracture network modelling
11
Computers & Geosciences 32 (2006) 17–27 Integrated conditional global optimisation for discrete fracture network modelling Nam H. Tran , Zhixi Chen, Sheik S. Rahman School of Petroleum Engineering, The University of New South Wales, Sydney NSW 2052, Australia Received 2 February 2005; received in revised form 31 March 2005; accepted 31 March 2005 Abstract This paper presents a methodology to simulate discrete fracture networks for naturally fractured reservoirs by combining statistical and spatial analyses, object-based modelling and conditional global optimisation. The methodology examines and utilises both continuum and discrete fracture information, such as spatial distribution of fracture density, statistical and geostatistical distributions of fracture size and orientation. The output is a network of discrete fractures, with their corresponding details of location, size and orientation. The methodology is illustrated by a case study on the surface fault system in New York region. The results show that it is able to produce discrete fracture network that match closely to the target fault map, even in the case where data are limited. The results show that it is also able to improve results of several recent fracture models, such as integrated stochastic simulations as well as grid- based simulations. r 2005 Elsevier Ltd. All rights reserved. Keywords: Naturally fractured reservoir; Stochastic simulation; Object-based; Geostatistics; Simulated annealing 1. Introduction Comprehensive understanding of fracture systems is critical to economical development of oil and gas reservoirs, generation of heat and vapour from geother- mal reservoirs, management of groundwater resources and underground nuclear wastes (National Research Council, 1996; Bonnet et al., 2001). In these naturally fractured reservoirs (NFR), reliable discrete fracture networks (DFN) are required to portray both fracture spatial distribution and details of individual fracture properties such as location, orientation, size, density and conductivity. In petroleum engineering, such DFN can be combined with conventional geological reservoir models as inputs for reservoir simulation and stimula- tion studies. They allow us to select the best locations for production wells, assess the response of natural fractures under stimulation pressure, hence, develop the best scenarios for hydraulic fracture treatments, design optimum production methods and evaluate reservoir potentials (National Research Council, 1996). Many mathematical and geo-mechanical techniques are available to simulate underground fracture networks (Oda et al., 1987; Carrera et al., 1990). They, however, mostly use only single source of data (either seismic maps or well logs) and rely on simplistic geometrical descrip- tions of fracture systems (e.g. homogeneous settings, parallel plate fractures). Due to the heterogeneous and multi-scaled nature of NFR, comprehensive fracture modelling requires utilisation of available data sources in integrated manners (Rawnsley and Wei, 2001). Stochastic simulation represents a comparatively more versatile and integrated approach. To some ARTICLE IN PRESS www.elsevier.com/locate/cageo 0098-3004/$ - see front matter r 2005 Elsevier Ltd. All rights reserved. doi:10.1016/j.cageo.2005.03.019 Corresponding author. Fax: +61 2 9385 5182. E-mail address: [email protected] (N.H. Tran).
-
Upload
independent -
Category
Documents
-
view
4 -
download
0
Transcript of Integrated conditional global optimisation for discrete fracture network modelling
ARTICLE IN PRESS
0098-3004/$ - se
doi:10.1016/j.ca
�CorrespondE-mail addr
Computers & Geosciences 32 (2006) 17–27
www.elsevier.com/locate/cageo
Integrated conditional global optimisation for discrete fracturenetwork modelling
Nam H. Tran�, Zhixi Chen, Sheik S. Rahman
School of Petroleum Engineering, The University of New South Wales, Sydney NSW 2052, Australia
Received 2 February 2005; received in revised form 31 March 2005; accepted 31 March 2005
Abstract
This paper presents a methodology to simulate discrete fracture networks for naturally fractured reservoirs by
combining statistical and spatial analyses, object-based modelling and conditional global optimisation. The
methodology examines and utilises both continuum and discrete fracture information, such as spatial distribution of
fracture density, statistical and geostatistical distributions of fracture size and orientation. The output is a network of
discrete fractures, with their corresponding details of location, size and orientation. The methodology is illustrated by a
case study on the surface fault system in New York region. The results show that it is able to produce discrete fracture
network that match closely to the target fault map, even in the case where data are limited. The results show that it is
also able to improve results of several recent fracture models, such as integrated stochastic simulations as well as grid-
based simulations.
r 2005 Elsevier Ltd. All rights reserved.
Keywords: Naturally fractured reservoir; Stochastic simulation; Object-based; Geostatistics; Simulated annealing
1. Introduction
Comprehensive understanding of fracture systems is
critical to economical development of oil and gas
reservoirs, generation of heat and vapour from geother-
mal reservoirs, management of groundwater resources
and underground nuclear wastes (National Research
Council, 1996; Bonnet et al., 2001). In these naturally
fractured reservoirs (NFR), reliable discrete fracture
networks (DFN) are required to portray both fracture
spatial distribution and details of individual fracture
properties such as location, orientation, size, density and
conductivity. In petroleum engineering, such DFN can
be combined with conventional geological reservoir
models as inputs for reservoir simulation and stimula-
e front matter r 2005 Elsevier Ltd. All rights reserve
geo.2005.03.019
ing author. Fax: +612 9385 5182.
ess: [email protected] (N.H. Tran).
tion studies. They allow us to select the best locations for
production wells, assess the response of natural fractures
under stimulation pressure, hence, develop the best
scenarios for hydraulic fracture treatments, design
optimum production methods and evaluate reservoir
potentials (National Research Council, 1996).
Many mathematical and geo-mechanical techniques
are available to simulate underground fracture networks
(Oda et al., 1987; Carrera et al., 1990). They, however,
mostly use only single source of data (either seismic maps
or well logs) and rely on simplistic geometrical descrip-
tions of fracture systems (e.g. homogeneous settings,
parallel plate fractures). Due to the heterogeneous and
multi-scaled nature of NFR, comprehensive fracture
modelling requires utilisation of available data sources
in integrated manners (Rawnsley and Wei, 2001).
Stochastic simulation represents a comparatively
more versatile and integrated approach. To some
d.
ARTICLE IN PRESSN.H. Tran et al. / Computers & Geosciences 32 (2006) 17–2718
extents, it succeeds in combining multiple data sources,
such as core descriptions and well logs (Willis-Richards,
1996; Cacas et al., 2001; Tran et al., 2002). Nevertheless,
because data are mostly available at well locations,
fracture distributions away from the wellbores are
uncertain. In other words, the unconditioned random
filling of the inter-well regions limits applications of such
simulations beyond the near-wellbore regions. In addition,
it remains a major problem to validate DFN from
stochastic simulations (National Research Council, 1996).
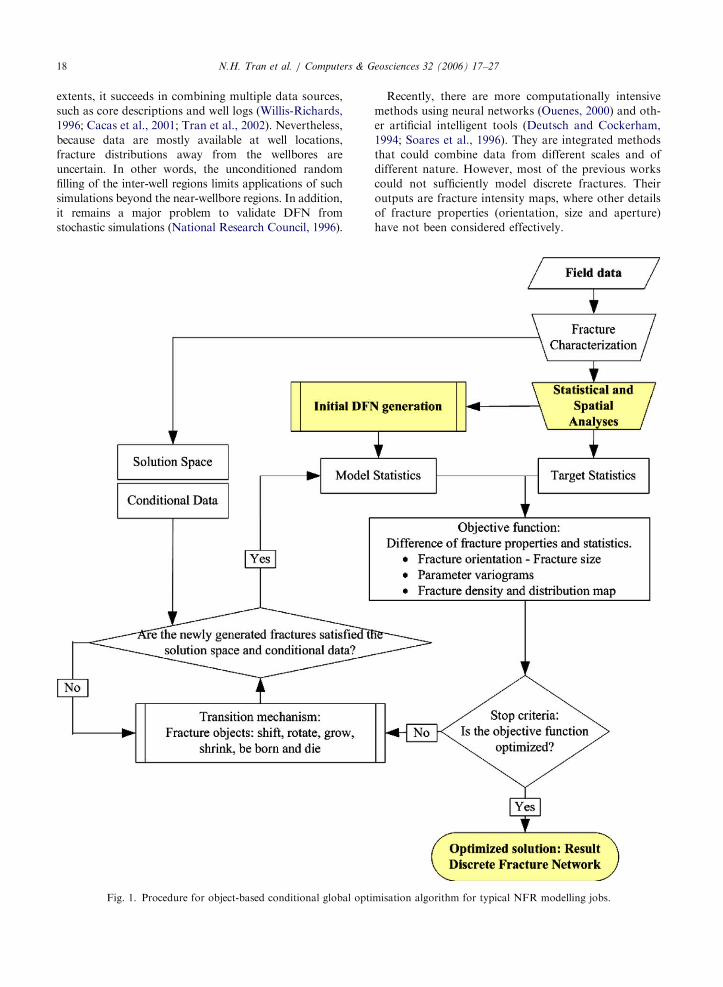
Fig. 1. Procedure for object-based conditional global opti
Recently, there are more computationally intensive
methods using neural networks (Ouenes, 2000) and oth-
er artificial intelligent tools (Deutsch and Cockerham,
1994; Soares et al., 1996). They are integrated methods
that could combine data from different scales and of
different nature. However, most of the previous works
could not sufficiently model discrete fractures. Their
outputs are fracture intensity maps, where other details
of fracture properties (orientation, size and aperture)
have not been considered effectively.
misation algorithm for typical NFR modelling jobs.

ARTICLE IN PRESSN.H. Tran et al. / Computers & Geosciences 32 (2006) 17–27 19
The objective of this work is to present a hybrid
methodology for simulating DFN of NFR. It involves
statistical and spatial analyses, object-based conditional
modelling, stochastic simulation and global optimisa-
tion. An object-based model treats fractures as discrete
objects. A global optimisation algorithm brings about
many advantages compared to the previously cited
methods, such as the ability to simultaneously and
sequentially integrate fracture data of different scales
and nature. Assumptions on distributions of fracture
properties and their variogram fitting as in conventional
geostatistics are not required. First, characteristic
statistics and spatial distributions of the reservoir
fracture properties (target) are determined. This process
can be performed in conjunction with or after the
process of characterisation in a typical reservoir study.
Next, an initial DFN (a realisation) is stochastically
generated. The differences between the target and any
generated realisation are formulated in an ‘‘objective
function’’. A conditional global optimisation algorithm
is applied to modify the realisation, in such a way that
the objective function is minimised. By doing so, the
realisation becomes more and more representative of the
target. Fig. 1 presents the methodological procedure.
In order to put this work in the correct perspective
and to demonstrate its advantages over the previous
methods, a brief review of each technique’s components
is presented, followed by a case study of a fault network
in the New York region, USA.
2. Integrated methodology for modelling discrete fracture
networks
2.1. Object-based modelling
Most of the previously cited fracture models are grid-
based, yielding only fracture intensity maps. These maps
could only indicate the fracture presence while details of
fracture properties such as orientation, size and aperture
are not available. An extensive study of NFR, however,
requires knowledge of not only fracture intensity
distribution, but also details of individual fractures.
Only then, comprehensive simulations for different
stimulation scenarios and fluid flows become possible
(National Research Council, 1996). In addition, an
object-based model gives more accurate results, by
allowing analyses on individual fracture properties and
their inter-relationships.
In this work, each single fracture is treated as a
discrete object. The fracture object is characterised by
properties such as location, orientation and size. Each
object possesses a variety of rules for behaviour in space
such as shift, rotate, grow, shrink, multiply or disappear.
Mathematically, a fracture network model (M) is
defined as a composite of total number of fractures
(NF), individual fracture (MF) and their attributes
(Kumar et al., 1999). Single fracture object, being the
base attribute, serves as base model for fracture location
(ML), size (MS) and orientation (MO) attributes:
M ¼MF �NF fMLðMF Þ �MOðMF Þ �MSðMF Þg. (1)
2.2. Statistical and spatial analyses
The aim of the optimisation modelling is to develop a
DFN, whose statistical and spatial measurements match
those of the target NFR. Thus, defining the representa-
tive and assessable measurements of fracture properties
is essential.
Farmer (1992) and Soares et al. (1996) employ
histogram, correlation, multi-histogram, spatial covar-
iance, fractal dimension, intersections and fracture
density. Deutsch and Cockerham (1994), in their pixel-
based simulated annealing, use semi-variogram (either
experimental or model) of fracture intensity. However,
the use of single fractal dimension value implies
assumptions on fractal characteristics of fracture net-
works, which is usually not adequate. Fracture networks
are more likely to possess multi-fractal characteristics
(Berkowitz and Hadad, 1997; Belfield, 1998; Stach et al.,
2001). Moreover, in a typical NFR, it is just impossible
to count the number of fracture intersections and their
statistics.
A statistical analysis on the fracture data gives general
understandings of individual properties. Generally,
natural fractures tend to be distributed in more than
one dominant directions, which correspond to the field
maximum and minimum stresses and litho-static,
tectonic and thermal history. Stronger stresses tend to
make fractures propagate out on the orthogonal planes.
Thus, fracture orientation is expected to belong to multi-
modal distributions (as opposed to simple one-modal
normal distributions described in the previous mathe-
matical methods and stochastic simulations, e.g. Willis-
Richards, 1996). Distributions for fracture lengths could
be lognormal, power law and (multi) fractal (Belfield,
1998; Bonnet et al., 2001; Stach et al., 2001). The
correlations between fracture orientation and size are
also important. In this approach, fractures are divided
into different sets based on their orientations. Natural
fractures with similar directions tend to have similar
characteristics (as they were created and influenced by
similar stresses). The statistical analysis is performed
using a statistical package S-PLUS.
A spatial analysis provides broad information on
fracture distribution in space and identifies the possible
specific patterns, clustering or regularity. Quantitative
spatial analysis is achieved by using various geostatis-
tical tools and developed in S-PLUS and Fortran 90.
The FORTRAN source codes are based on GSLIB: a

ARTICLE IN PRESSN.H. Tran et al. / Computers & Geosciences 32 (2006) 17–2720
geostatistical software library (Deutsch and Journel,
1992).
Variogram, a second-order moment, is used for
visualising, modelling and exploiting spatial continuity
and spatial variability of regionalised variables. Vario-
gram is also a generalised variable characterised by both
generalisation and randomness. This has made it
possible to be used widely in geostatistical modelling,
especially in spatial distribution characterisation
(Deutsch and Cockerham, 1994). A semi-variogram
(gðhÞ) describes how a parameter (z) varies in space as a
function of lag distance between two measuring loca-
tions (xi) and (xi þ h) (separated by a vector h):
gðhÞ ¼1
2NðhÞ
XNðhÞi¼1
½zðxi þ hÞ � zðxiÞ�2, (2)
where NðhÞ is total number of the data pairs. A cross-
variogram (gcðhÞ) represents variogram between two
different variables z1 and z2:
gcðhÞ
¼1
2NðhÞ
XNðhÞi¼1
½z1ðxi þ hÞ � z1ðxiÞ�½z2ðxi þ hÞ � z2ðxiÞ�. ð3Þ
In this work, geostatistical analysis also involves a
modified multi-histogram, which originates from histo-
gram and variogram measurements. Multi-histogram
mean vector (HmðhÞ) is defined as
HmðhÞ ¼1
NðhÞ
XNðhÞi¼1
½zðxiÞ�. (4)
Finally, fracture density is defined as the total fracture
area per unit volume in 3D (P32) or total fracture trace
length per unit area in 2D (P21). Fracture intensity
refers to the number of fractures per unit volume in 3D
(P30) or area in 2D (P20) (Dershowitz and Herda,
1992). Fracture density is one of the most important
fracture network characteristics, being directly propor-
tional to the number of fractures per unit volume and
their relative size distribution. Spatial distributions of
both fracture density and intensity are continuum (grid-
based) measurements. For a grid-block, the quantities
are determined by counting only the portion of fractures
crossing. In this work, both overall fracture density and
intensity maps of a fracture network are considered and
developed into discrete models.
2.3. Global optimisation
Global optimisation has effectively solved complex
problems in combinatorial optimisation, acquiring
optimum values of a function of very large number of
independent variables (Sen and Stoffa, 1995). It is
especially suitable for such complicated problems as
modelling fracture networks, where there are many
parameters and statistics to optimise. Procedure for
global optimisation modelling of DFN is presented in
Fig. 1.
The first step of global optimisation for DFN
modelling is problem representation. The actual DFN
to be modelled is represented as ‘‘target’’ of the
optimisation program. The differences between the
target and any generated realisation are formulated in
‘‘objective function’’. The objective function represents
the mathematical difference between the DFN realisa-
tion and the target (the actual fracture data from the
field) (*). It is composed of a weighted average of
positive functions:
E ¼X
i
wizi � z�i
z�i
� �2, (5)
where zi denotes arbitrary components of the objective
function. wi are the weighting factors (Swi ¼ 1:0).The optimisation algorithm will continuously modify
DFN realisations, guiding the objective function to
minimisation. The minimum value is equivalent to
achieving the DFN, which is expected to be closed to
the target.
In the modification step, the global optimisation
algorithm systematically transfers a DFN realisation
from one state to another. It starts from an initial
realisation and finishes with the minimised objective
function. During the transition, each fracture, as an
individual object, exercises one or combination of the
possible behaviours (shift, rotate, grow or shrink), while
still stays within the defined solution space. The
algorithm continually observes overall fracture density
to be within its pre-defined range. At any point where
the density value gets higher than the upper limit,
fractures are forced to shrink or disappear (die).
Similarly, if the fracture density falls below the lower
limit, fracture size is enlarged or more fractures are
inserted (be born).
For each modification, a new realisation of DFN is
obtained. Global optimisation algorithm determines
whether the modification is counted or not. If not, the
program generates another realisation. This process is
called generation-acceptance, guiding the algorithm to a
global optimal. Unlike simple algorithm (e.g. exhaustive
search), advanced global optimisation algorithm (simu-
lated annealing) accepts all generations with a prob-
ability. This mechanism facilitates the speed of
convergence and avoids being trapped at local optima.
If the objective function is reduced, the probability of
acceptance equals one.
The generation-acceptance process repeats, until there
has not been any significant improvement or the
objective function becomes small enough. In the former
case, the objective function could reach the required
level of minimisation. Then, it is necessary to check if the
ARTICLE IN PRESSN.H. Tran et al. / Computers & Geosciences 32 (2006) 17–27 21
chosen statistics and their relative weighting factors are
representative for the target fracture network data. In
the later case, the minimum objective function results in
a DFN, which is most mathematically representative to
the target fracture data?.
One of the remarkable advantages of global optimisa-
tion is the flexibility of the objective function. Fracture
data of different scales and nature are integrated as
independent components of the objective function.
Formulation of the objective function is an essential
step and should follow data analysis, so that the
characteristic statistical and spatial measurements could
be assessed. In this work, the objective function contains
the overall fracture density (global indicator), fracture
density and intensity distribution maps (continuum
indicators). It also includes semi-variogram, cross-
variogram, modified multi-histograms and representa-
tive statistics of fracture size and orientation (discrete
indicators). It is also important to consider the
program’s accuracy and speed. More and/or different
components could be included into the objective
function. However, the speed of convergence would
have to be considered.
The weighting factors are chosen proportionally to
the importance of each measurement on the convergence
of the optimisation process. General observations
indicate that first-order statistics (e.g. mean, modified
multi-histogram mean and variogram distance) should
correspond to small weighting factors, compared to
other second-order moments (e.g. semi-variogram and
cross-variogram) and fracture densities.
Through iterations, the new objective function is
updated rather than computed. For example, when a
fracture zðxiÞ is perturbed to z0ðx0iÞ and the total number
of fractures is unchanged, the variogram is updated as
gnewðhÞ ¼ gold ðhÞ � f½zðxi þ hÞ � zðxiÞ�2 � ½zðxi � hÞ
� zðxiÞ�2 þþ½zðxi þ hÞ � z0ðx0 iÞ�
2
þ ½zðxi � hÞ � z0ðx0iÞ�2g. ð6Þ
When a region of large number of fractures is
considered, this process drastically reduces computa-
tional time and resources.
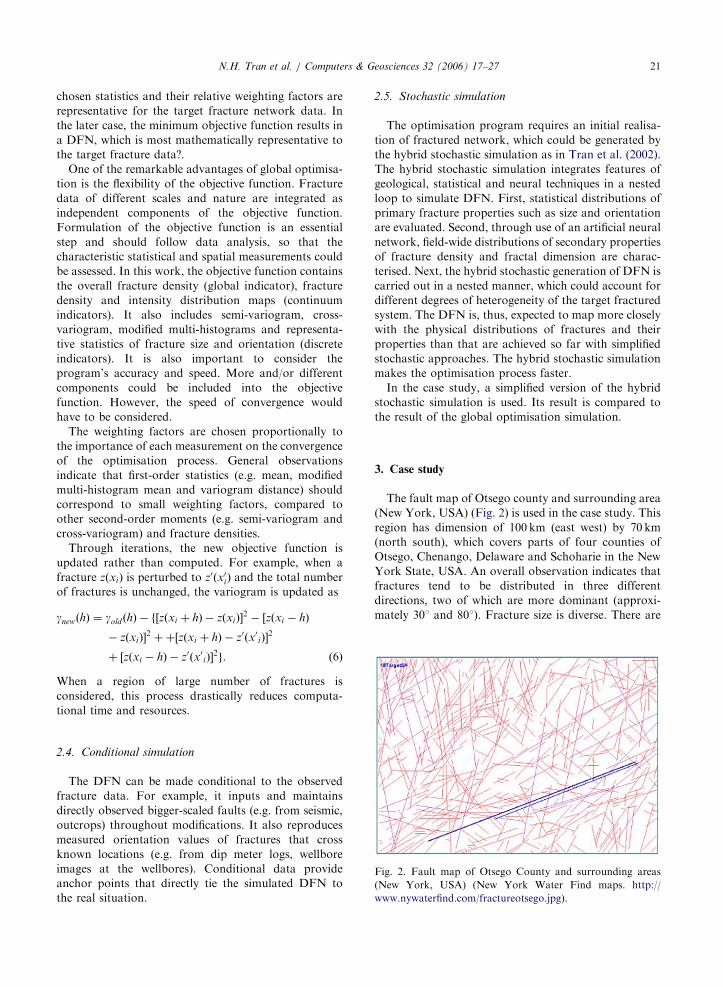
Fig. 2. Fault map of Otsego County and surrounding areas
(New York, USA) (New York Water Find maps. http://
www.nywaterfind.com/fractureotsego.jpg).
2.4. Conditional simulation
The DFN can be made conditional to the observed
fracture data. For example, it inputs and maintains
directly observed bigger-scaled faults (e.g. from seismic,
outcrops) throughout modifications. It also reproduces
measured orientation values of fractures that cross
known locations (e.g. from dip meter logs, wellbore
images at the wellbores). Conditional data provide
anchor points that directly tie the simulated DFN to
the real situation.
2.5. Stochastic simulation
The optimisation program requires an initial realisa-
tion of fractured network, which could be generated by
the hybrid stochastic simulation as in Tran et al. (2002).
The hybrid stochastic simulation integrates features of
geological, statistical and neural techniques in a nested
loop to simulate DFN. First, statistical distributions of
primary fracture properties such as size and orientation
are evaluated. Second, through use of an artificial neural
network, field-wide distributions of secondary properties
of fracture density and fractal dimension are charac-
terised. Next, the hybrid stochastic generation of DFN is
carried out in a nested manner, which could account for
different degrees of heterogeneity of the target fractured
system. The DFN is, thus, expected to map more closely
with the physical distributions of fractures and their
properties than that are achieved so far with simplified
stochastic approaches. The hybrid stochastic simulation
makes the optimisation process faster.
In the case study, a simplified version of the hybrid
stochastic simulation is used. Its result is compared to
the result of the global optimisation simulation.
3. Case study
The fault map of Otsego county and surrounding area
(New York, USA) (Fig. 2) is used in the case study. This
region has dimension of 100 km (east west) by 70 km
(north south), which covers parts of four counties of
Otsego, Chenango, Delaware and Schoharie in the New
York State, USA. An overall observation indicates that
fractures tend to be distributed in three different
directions, two of which are more dominant (approxi-
mately 301 and 801). Fracture size is diverse. There are
ARTICLE IN PRESSN.H. Tran et al. / Computers & Geosciences 32 (2006) 17–2722
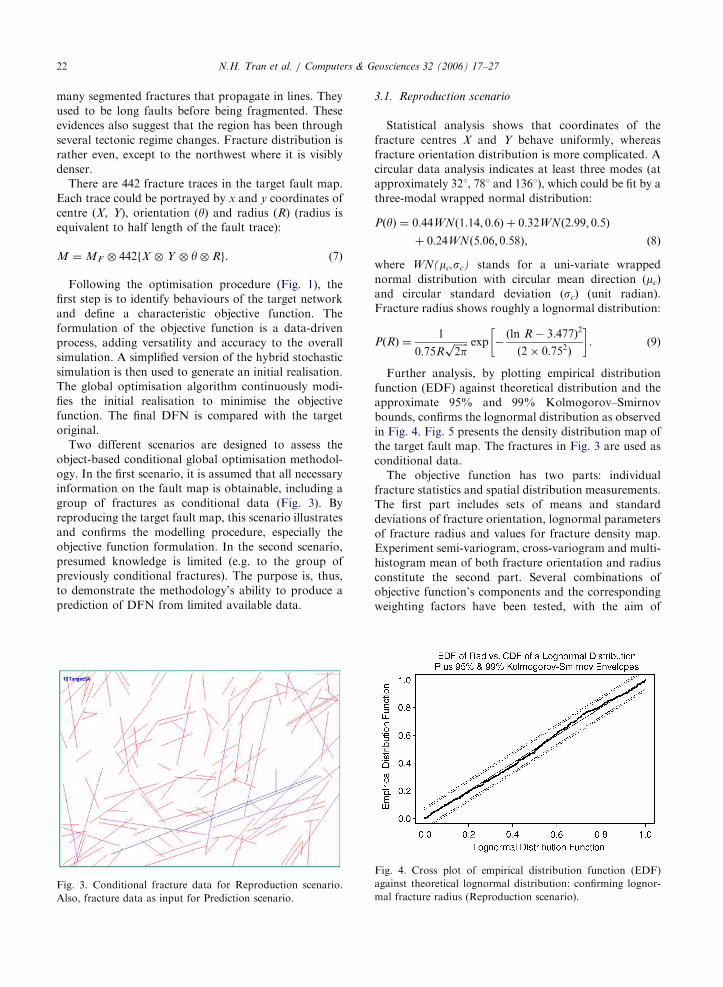
many segmented fractures that propagate in lines. They
used to be long faults before being fragmented. These
evidences also suggest that the region has been through
several tectonic regime changes. Fracture distribution is
rather even, except to the northwest where it is visibly
denser.
There are 442 fracture traces in the target fault map.
Each trace could be portrayed by x and y coordinates of
centre (X, Y), orientation (y) and radius (R) (radius is
equivalent to half length of the fault trace):
M ¼MF � 442fX � Y � y� Rg. (7)
Following the optimisation procedure (Fig. 1), the
first step is to identify behaviours of the target network
and define a characteristic objective function. The
formulation of the objective function is a data-driven
process, adding versatility and accuracy to the overall
simulation. A simplified version of the hybrid stochastic
simulation is then used to generate an initial realisation.
The global optimisation algorithm continuously modi-
fies the initial realisation to minimise the objective
function. The final DFN is compared with the target
original.
Two different scenarios are designed to assess the
object-based conditional global optimisation methodol-
ogy. In the first scenario, it is assumed that all necessary
information on the fault map is obtainable, including a
group of fractures as conditional data (Fig. 3). By
reproducing the target fault map, this scenario illustrates
and confirms the modelling procedure, especially the
objective function formulation. In the second scenario,
presumed knowledge is limited (e.g. to the group of
previously conditional fractures). The purpose is, thus,
to demonstrate the methodology’s ability to produce a
prediction of DFN from limited available data.
Fig. 3. Conditional fracture data for Reproduction scenario.
Also, fracture data as input for Prediction scenario.
3.1. Reproduction scenario
Statistical analysis shows that coordinates of the
fracture centres X and Y behave uniformly, whereas
fracture orientation distribution is more complicated. A
circular data analysis indicates at least three modes (at
approximately 321, 781 and 1361), which could be fit by a
three-modal wrapped normal distribution:
PðyÞ ¼ 0:44WNð1:14; 0:6Þ þ 0:32WNð2:99; 0:5Þ
þ 0:24WNð5:06; 0:58Þ, ð8Þ
where WN(mc,sc) stands for a uni-variate wrapped
normal distribution with circular mean direction (mc)
and circular standard deviation (sc) (unit radian).
Fracture radius shows roughly a lognormal distribution:
PðRÞ ¼1
0:75Rffiffiffiffiffiffi2pp exp �
ðln R� 3:477Þ2
ð2� 0:752Þ
� �. (9)
Further analysis, by plotting empirical distribution
function (EDF) against theoretical distribution and the
approximate 95% and 99% Kolmogorov–Smirnov
bounds, confirms the lognormal distribution as observed
in Fig. 4. Fig. 5 presents the density distribution map of
the target fault map. The fractures in Fig. 3 are used as
conditional data.
The objective function has two parts: individual
fracture statistics and spatial distribution measurements.
The first part includes sets of means and standard
deviations of fracture orientation, lognormal parameters
of fracture radius and values for fracture density map.
Experiment semi-variogram, cross-variogram and multi-
histogram mean of both fracture orientation and radius
constitute the second part. Several combinations of
objective function’s components and the corresponding
weighting factors have been tested, with the aim of
Fig. 4. Cross plot of empirical distribution function (EDF)
against theoretical lognormal distribution: confirming lognor-
mal fracture radius (Reproduction scenario).
ARTICLE IN PRESSN.H. Tran et al. / Computers & Geosciences 32 (2006) 17–27 23
minimising the final objective function and the speed of
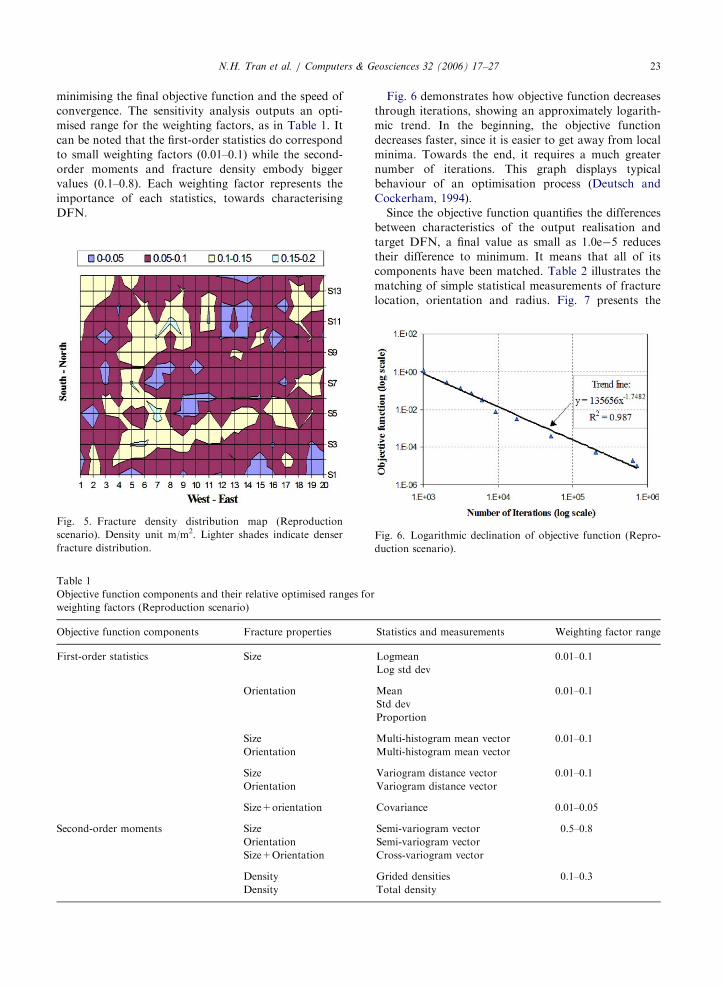
convergence. The sensitivity analysis outputs an opti-
mised range for the weighting factors, as in Table 1. It
can be noted that the first-order statistics do correspond
to small weighting factors (0.01–0.1) while the second-
order moments and fracture density embody bigger
values (0.1–0.8). Each weighting factor represents the
importance of each statistics, towards characterising
DFN.
Fig. 5. Fracture density distribution map (Reproduction
scenario). Density unit m/m2. Lighter shades indicate denser
fracture distribution.
Table 1
Objective function components and their relative optimised ranges for
weighting factors (Reproduction scenario)
Objective function components Fracture properties
First-order statistics Size
Orientation
Size
Orientation
Size
Orientation
Size+orientation
Second-order moments Size
Orientation
Size+Orientation
Density
Density
Fig. 6 demonstrates how objective function decreases
through iterations, showing an approximately logarith-
mic trend. In the beginning, the objective function
decreases faster, since it is easier to get away from local
minima. Towards the end, it requires a much greater
number of iterations. This graph displays typical
behaviour of an optimisation process (Deutsch and
Cockerham, 1994).
Since the objective function quantifies the differences
between characteristics of the output realisation and
target DFN, a final value as small as 1.0e�5 reduces
their difference to minimum. It means that all of its
components have been matched. Table 2 illustrates the
matching of simple statistical measurements of fracture
location, orientation and radius. Fig. 7 presents the
Statistics and measurements Weighting factor range
Logmean 0.01–0.1
Log std dev
Mean 0.01–0.1
Std dev
Proportion
Multi-histogram mean vector 0.01–0.1
Multi-histogram mean vector
Variogram distance vector 0.01–0.1
Variogram distance vector
Covariance 0.01–0.05
Semi-variogram vector 0.5–0.8
Semi-variogram vector
Cross-variogram vector
Grided densities 0.1–0.3
Total density
Fig. 6. Logarithmic declination of objective function (Repro-
duction scenario).

ARTICLE IN PRESS
Table 2
Comparison of objective function components
Simple statistics comparison
Target (0) FraCGOM
(2)
Percentage
error (%)
Stochastic
simulation (1)
Percentage
error (%)
Radius (m)
Lognormal mean 42.87 41.55 3.085 40.42 5.719
Lognormal std dev 37.23 35.76 3.948 31.92 14.281
Orientation (radian)
Set 1: Mean 1.140 1.131 0.756 1.054 7.506
Std dev 0.600 0.600 0.000 0.435 27.434
Probability factor 0.440 0.439 0.287 0.428 2.726
Set 2: Mean 2.990 3.007 0.553 3.165 5.864
Std dev 0.500 0.510 1.953 0.727 45.313
Probability factor 0.320 0.322 0.660 0.340 6.271
Set 3: Mean 5.060 5.027 0.654 4.722 6.685
Std dev 0.580 0.586 0.977 0.369 36.373
Probability factor 0.240 0.239 0.474 0.229 4.498
Total fracture density (m/m�m) 0.0792 0.0793 0.076 0.0794 0.252
For target DFN (0), initial realisation by stochastic simulation (1), and final DFN (2) (Reproduction scenario).
Fig. 7. Comparison of experiment semi-variogram vectors for target DFN (0), initial realisation by stochastic simulation (1), and final
DFN (FraCGOM 2) (Reproduction scenario). (A) Fracture radius; (B) fracture orientation.
N.H. Tran et al. / Computers & Geosciences 32 (2006) 17–2724
matching of experimental semi-variogram of fracture
radius and orientation, respectively. The final DFN
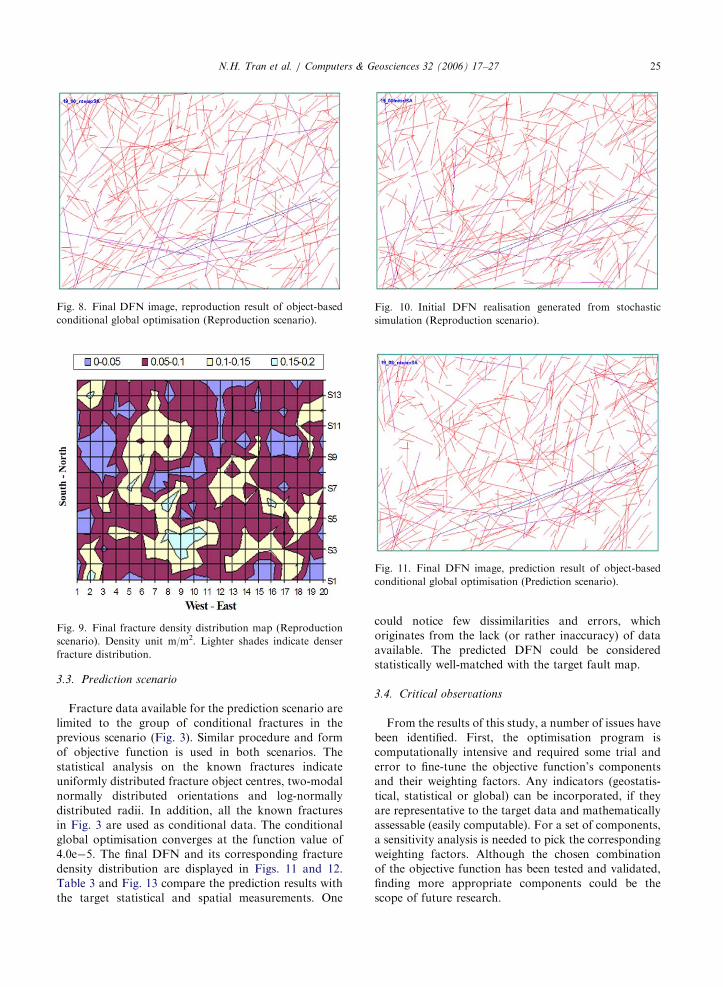
realisation for this scenario and its corresponding
density distribution map are shown in Figs. 8 and 9.
The results are quite comparable to the target fault map,
which confirm the reproduction ability of the object-
based conditional global optimisation methodology.
3.2. Comparison to stochastic simulation
Since a current stochastic simulation is used to
generate the initial DFN, a comparison between results
of the stochastic simulation (Fig. 10) and global
optimisation methodology (Fig. 8) is possible. By visual
comparison, it is observed that the global optimisation
methodology results in a closer matched with the target
fault map. In fact, the objective function is improved
from 0.40 to 1.0e�5. Details of the objective function
components are compared in Table 2 and Fig. 7. This
comparison reaffirms that stochastic simulations could
not effectively utilise such sophisticated spatial statistics
as experimental variograms. Moreover, the global
optimisation methodology does not assume prior data
distribution and requires no variogram fitting. It
provides one effective solution to improve results of
the previous integrated stochastic simulations.
ARTICLE IN PRESS
Fig. 8. Final DFN image, reproduction result of object-based
conditional global optimisation (Reproduction scenario).
Fig. 9. Final fracture density distribution map (Reproduction
scenario). Density unit m/m2. Lighter shades indicate denser
fracture distribution.
Fig. 10. Initial DFN realisation generated from stochastic
simulation (Reproduction scenario).
Fig. 11. Final DFN image, prediction result of object-based
conditional global optimisation (Prediction scenario).
N.H. Tran et al. / Computers & Geosciences 32 (2006) 17–27 25
3.3. Prediction scenario
Fracture data available for the prediction scenario are
limited to the group of conditional fractures in the
previous scenario (Fig. 3). Similar procedure and form
of objective function is used in both scenarios. The
statistical analysis on the known fractures indicate
uniformly distributed fracture object centres, two-modal
normally distributed orientations and log-normally
distributed radii. In addition, all the known fractures
in Fig. 3 are used as conditional data. The conditional
global optimisation converges at the function value of
4.0e�5. The final DFN and its corresponding fracture
density distribution are displayed in Figs. 11 and 12.
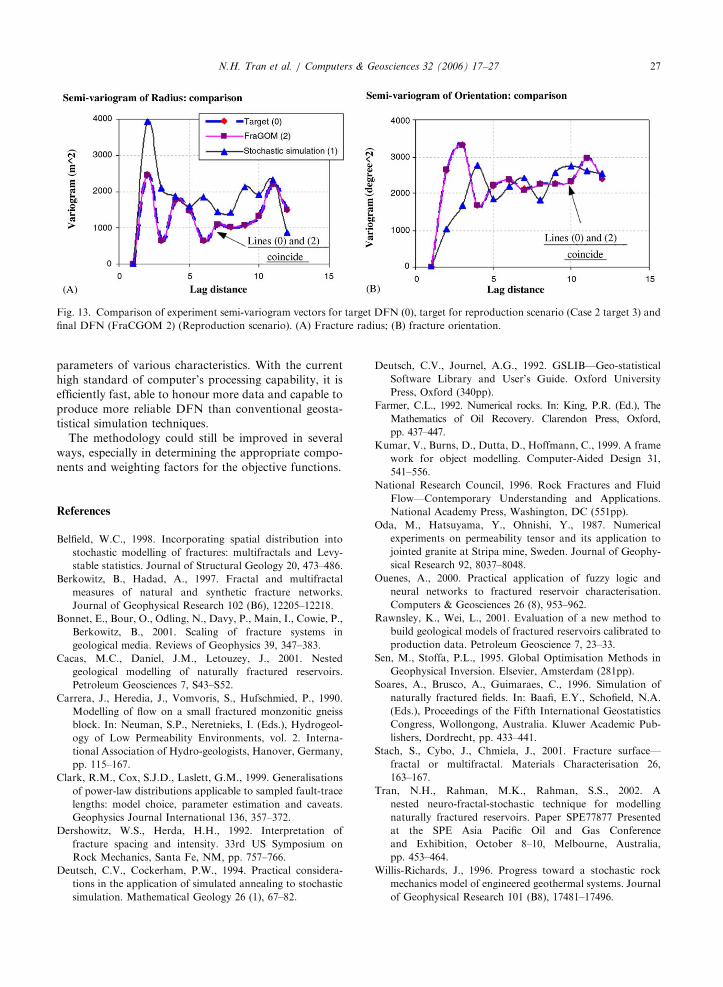
Table 3 and Fig. 13 compare the prediction results with
the target statistical and spatial measurements. One
could notice few dissimilarities and errors, which
originates from the lack (or rather inaccuracy) of data
available. The predicted DFN could be considered
statistically well-matched with the target fault map.
3.4. Critical observations
From the results of this study, a number of issues have
been identified. First, the optimisation program is
computationally intensive and required some trial and
error to fine-tune the objective function’s components
and their weighting factors. Any indicators (geostatis-
tical, statistical or global) can be incorporated, if they
are representative to the target data and mathematically
assessable (easily computable). For a set of components,
a sensitivity analysis is needed to pick the corresponding
weighting factors. Although the chosen combination
of the objective function has been tested and validated,
finding more appropriate components could be the
scope of future research.
ARTICLE IN PRESSN.H. Tran et al. / Computers & Geosciences 32 (2006) 17–2726
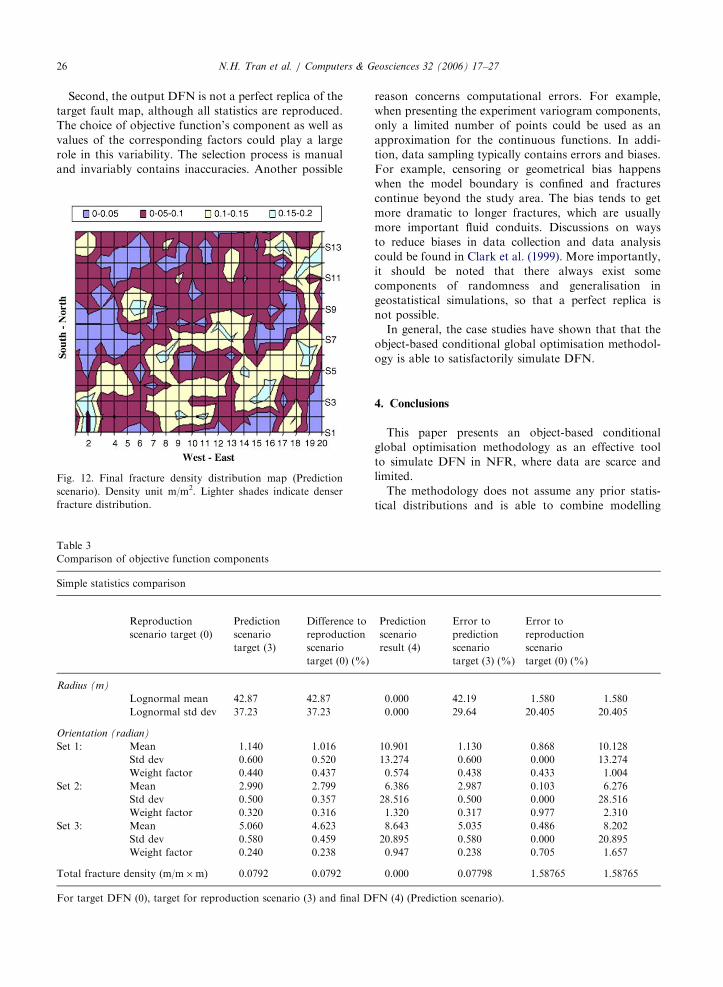
Second, the output DFN is not a perfect replica of the
target fault map, although all statistics are reproduced.
The choice of objective function’s component as well as
values of the corresponding factors could play a large
role in this variability. The selection process is manual
and invariably contains inaccuracies. Another possible
Fig. 12. Final fracture density distribution map (Prediction
scenario). Density unit m/m2. Lighter shades indicate denser
fracture distribution.
Table 3
Comparison of objective function components
Simple statistics comparison
Reproduction
scenario target (0)
Prediction
scenario
target (3)
Difference to
reproduction
scenario
target (0) (%)
Radius (m)
Lognormal mean 42.87 42.87
Lognormal std dev 37.23 37.23
Orientation (radian)
Set 1: Mean 1.140 1.016
Std dev 0.600 0.520
Weight factor 0.440 0.437
Set 2: Mean 2.990 2.799
Std dev 0.500 0.357
Weight factor 0.320 0.316
Set 3: Mean 5.060 4.623
Std dev 0.580 0.459
Weight factor 0.240 0.238
Total fracture density (m/m�m) 0.0792 0.0792
For target DFN (0), target for reproduction scenario (3) and final D
reason concerns computational errors. For example,
when presenting the experiment variogram components,
only a limited number of points could be used as an
approximation for the continuous functions. In addi-
tion, data sampling typically contains errors and biases.
For example, censoring or geometrical bias happens
when the model boundary is confined and fractures
continue beyond the study area. The bias tends to get
more dramatic to longer fractures, which are usually
more important fluid conduits. Discussions on ways
to reduce biases in data collection and data analysis
could be found in Clark et al. (1999). More importantly,
it should be noted that there always exist some
components of randomness and generalisation in
geostatistical simulations, so that a perfect replica is
not possible.
In general, the case studies have shown that that the
object-based conditional global optimisation methodol-
ogy is able to satisfactorily simulate DFN.
4. Conclusions
This paper presents an object-based conditional
global optimisation methodology as an effective tool
to simulate DFN in NFR, where data are scarce and
limited.
The methodology does not assume any prior statis-
tical distributions and is able to combine modelling
Prediction
scenario
result (4)
Error to
prediction
scenario
target (3) (%)
Error to
reproduction
scenario
target (0) (%)
0.000 42.19 1.580 1.580
0.000 29.64 20.405 20.405
10.901 1.130 0.868 10.128
13.274 0.600 0.000 13.274
0.574 0.438 0.433 1.004
6.386 2.987 0.103 6.276
28.516 0.500 0.000 28.516
1.320 0.317 0.977 2.310
8.643 5.035 0.486 8.202
20.895 0.580 0.000 20.895
0.947 0.238 0.705 1.657
0.000 0.07798 1.58765 1.58765
FN (4) (Prediction scenario).
ARTICLE IN PRESS
Fig. 13. Comparison of experiment semi-variogram vectors for target DFN (0), target for reproduction scenario (Case 2 target 3) and
final DFN (FraCGOM 2) (Reproduction scenario). (A) Fracture radius; (B) fracture orientation.
N.H. Tran et al. / Computers & Geosciences 32 (2006) 17–27 27
parameters of various characteristics. With the current
high standard of computer’s processing capability, it is
efficiently fast, able to honour more data and capable to
produce more reliable DFN than conventional geosta-
tistical simulation techniques.
The methodology could still be improved in several
ways, especially in determining the appropriate compo-
nents and weighting factors for the objective functions.
References
Belfield, W.C., 1998. Incorporating spatial distribution into
stochastic modelling of fractures: multifractals and Levy-
stable statistics. Journal of Structural Geology 20, 473–486.
Berkowitz, B., Hadad, A., 1997. Fractal and multifractal
measures of natural and synthetic fracture networks.
Journal of Geophysical Research 102 (B6), 12205–12218.
Bonnet, E., Bour, O., Odling, N., Davy, P., Main, I., Cowie, P.,
Berkowitz, B., 2001. Scaling of fracture systems in
geological media. Reviews of Geophysics 39, 347–383.
Cacas, M.C., Daniel, J.M., Letouzey, J., 2001. Nested
geological modelling of naturally fractured reservoirs.
Petroleum Geosciences 7, S43–S52.
Carrera, J., Heredia, J., Vomvoris, S., Hufschmied, P., 1990.
Modelling of flow on a small fractured monzonitic gneiss
block. In: Neuman, S.P., Neretnieks, I. (Eds.), Hydrogeol-
ogy of Low Permeability Environments, vol. 2. Interna-
tional Association of Hydro-geologists, Hanover, Germany,
pp. 115–167.
Clark, R.M., Cox, S.J.D., Laslett, G.M., 1999. Generalisations
of power-law distributions applicable to sampled fault-trace
lengths: model choice, parameter estimation and caveats.
Geophysics Journal International 136, 357–372.
Dershowitz, W.S., Herda, H.H., 1992. Interpretation of
fracture spacing and intensity. 33rd US Symposium on
Rock Mechanics, Santa Fe, NM, pp. 757–766.
Deutsch, C.V., Cockerham, P.W., 1994. Practical considera-
tions in the application of simulated annealing to stochastic
simulation. Mathematical Geology 26 (1), 67–82.
Deutsch, C.V., Journel, A.G., 1992. GSLIB—Geo-statistical
Software Library and User’s Guide. Oxford University
Press, Oxford (340pp).
Farmer, C.L., 1992. Numerical rocks. In: King, P.R. (Ed.), The
Mathematics of Oil Recovery. Clarendon Press, Oxford,
pp. 437–447.
Kumar, V., Burns, D., Dutta, D., Hoffmann, C., 1999. A frame
work for object modelling. Computer-Aided Design 31,
541–556.
National Research Council, 1996. Rock Fractures and Fluid
Flow—Contemporary Understanding and Applications.
National Academy Press, Washington, DC (551pp).
Oda, M., Hatsuyama, Y., Ohnishi, Y., 1987. Numerical
experiments on permeability tensor and its application to
jointed granite at Stripa mine, Sweden. Journal of Geophy-
sical Research 92, 8037–8048.
Ouenes, A., 2000. Practical application of fuzzy logic and
neural networks to fractured reservoir characterisation.
Computers & Geosciences 26 (8), 953–962.
Rawnsley, K., Wei, L., 2001. Evaluation of a new method to
build geological models of fractured reservoirs calibrated to
production data. Petroleum Geoscience 7, 23–33.
Sen, M., Stoffa, P.L., 1995. Global Optimisation Methods in
Geophysical Inversion. Elsevier, Amsterdam (281pp).
Soares, A., Brusco, A., Guimaraes, C., 1996. Simulation of
naturally fractured fields. In: Baafi, E.Y., Schofield, N.A.
(Eds.), Proceedings of the Fifth International Geostatistics
Congress, Wollongong, Australia. Kluwer Academic Pub-
lishers, Dordrecht, pp. 433–441.
Stach, S., Cybo, J., Chmiela, J., 2001. Fracture surface—
fractal or multifractal. Materials Characterisation 26,
163–167.
Tran, N.H., Rahman, M.K., Rahman, S.S., 2002. A
nested neuro-fractal-stochastic technique for modelling
naturally fractured reservoirs. Paper SPE77877 Presented
at the SPE Asia Pacific Oil and Gas Conference
and Exhibition, October 8–10, Melbourne, Australia,
pp. 453–464.
Willis-Richards, J., 1996. Progress toward a stochastic rock
mechanics model of engineered geothermal systems. Journal
of Geophysical Research 101 (B8), 17481–17496.