Classification of Bovine Reproductive Cycle Phase using Ultrasound-Detected Features
8
Classification of Bovine Reproductive Cycle Phase using Ultrasound-Detected Features Idalia Maldonado-Castillo Department of Computer Science 110 Science Place University of Saskatchewan Saskatoon, SK, CANADA, S7N 5C9 [email protected] Mark G. Eramian Department of Computer Science 110 Science Place University of Saskatchewan Saskatoon, SK, CANADA, S7N 5C9 [email protected] Roger A. Pierson Obstetrics, Gynecology, and Reproductive Sciences 103 Hospital Drive University of Saskatchewan Saskatoon, SK, CANADA, S7N 0W8 [email protected] Jaswant Singh Department of Veterinary Biomedical Sciences Western College of Veterinary Medicine 52 Campus Drive University of Saskatchewan Saskatoon, SK, CANADA, S7N 5B4 [email protected] Gregg P. Adams Department of Veterinary Biomedical Sciences Western College of Veterinary Medicine 52 Campus Drive University of Saskatchewan Saskatoon, SK, CANADA, S7N 5B4 [email protected] Abstract Studies of ovarian development in female mammals have shown a relationship between the day in the estrous cy- cle and the size of the main structures and physiological status of the ovary. This paper presents an algorithm for the automatic classification of bovine ovaries into tempo- ral categories using information extracted from ultrasound images. The temporal classes corresponded roughly to the metestrus, diestrus, and proestrus phases of the bovine re- productive cycle. Features based on the sizes of ovarian structures formed the patterns on which the classification was performed. A Na¨ ıve Bayes classifier was able to cor- rectly classify the stage of the estrous cycle for 86.36% of the test patterns. A decision tree classified 100% of the test patterns correctly. The decision tree inference algorithm used to build the classifier constructed a tree that used only two of the five available features indicating that they form a sufficiently rich set of features for robust classification. 1 Introduction The reproductive cycles of humans and large mammals can be monitored by imaging the ovaries using ultrasonog- raphy [1, 2, 3, 6, 7, 12, 13, 15, 17, 24, 25]. The reproductive cycle, or estrous cycle, of domestic animals consists of four phases: metestrus, diestrus, proestrus and estrus. In non- pregnant cows, ovulation occurs at approximately 20 or 21 day intervals and usually happens near the end of (or shortly after) the estrus phase. The ovarian structures visible in an ultrasound image provide clues to the animal’s current re- productive phase. The objective of this study was to develop an image- based classification system which can automatically deter- mine an animal’s current stage in its reproductive cycle based on a single day’s ultrasonographic examination of the ovaries. The algorithm was developed and tested using im- ages of bovine ovaries which were to be classified as be- ing in either the early (metestrus), middle (diestrus), or late (proestrus) phase of the estrous cycle.
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of Classification of Bovine Reproductive Cycle Phase using Ultrasound-Detected Features

Classification of Bovine Reproductive Cycle Phase usingUltrasound-Detected Features
Idalia Maldonado-CastilloDepartment of Computer Science
110 Science PlaceUniversity of Saskatchewan
Saskatoon, SK, CANADA, S7N [email protected]
Mark G. EramianDepartment of Computer Science
110 Science PlaceUniversity of Saskatchewan
Saskatoon, SK, CANADA, S7N [email protected]
Roger A. PiersonObstetrics, Gynecology, and Reproductive Sciences
103 Hospital DriveUniversity of Saskatchewan
Saskatoon, SK, CANADA, S7N [email protected]
Jaswant SinghDepartment of Veterinary Biomedical Sciences
Western College of Veterinary Medicine52 Campus Drive
University of SaskatchewanSaskatoon, SK, CANADA, S7N 5B4
Gregg P. AdamsDepartment of Veterinary Biomedical Sciences
Western College of Veterinary Medicine52 Campus Drive
University of SaskatchewanSaskatoon, SK, CANADA, S7N 5B4
Abstract
Studies of ovarian development in female mammals haveshown a relationship between the day in the estrous cy-cle and the size of the main structures and physiologicalstatus of the ovary. This paper presents an algorithm forthe automatic classification of bovine ovaries into tempo-ral categories using information extracted from ultrasoundimages. The temporal classes corresponded roughly to themetestrus, diestrus, and proestrus phases of the bovine re-productive cycle. Features based on the sizes of ovarianstructures formed the patterns on which the classificationwas performed. A Naıve Bayes classifier was able to cor-rectly classify the stage of the estrous cycle for 86.36% ofthe test patterns. A decision tree classified 100% of the testpatterns correctly. The decision tree inference algorithmused to build the classifier constructed a tree that used onlytwo of the five available features indicating that they form asufficiently rich set of features for robust classification.
1 Introduction
The reproductive cycles of humans and large mammalscan be monitored by imaging the ovaries using ultrasonog-raphy [1, 2, 3, 6, 7, 12, 13, 15, 17, 24, 25]. The reproductivecycle, or estrous cycle, of domestic animals consists of fourphases: metestrus, diestrus, proestrus and estrus. In non-pregnant cows, ovulation occurs at approximately 20 or 21day intervals and usually happens near the end of (or shortlyafter) the estrus phase. The ovarian structures visible in anultrasound image provide clues to the animal’s current re-productive phase.
The objective of this study was to develop an image-based classification system which can automatically deter-mine an animal’s current stage in its reproductive cyclebased on a single day’s ultrasonographic examination of theovaries. The algorithm was developed and tested using im-ages of bovine ovaries which were to be classified as be-ing in either the early (metestrus), middle (diestrus), or late(proestrus) phase of the estrous cycle.

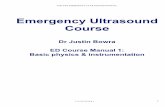
Corpus Luteum
Oocytes
Dominant FollicleSubordinate Follicles
Figure 1. Schematic representation of a mam-malian ovary. The major structures are fol-licles, in which oocytes (eggs) develop, andthe corpus luteum (CL). The largest follicle ofa wave is termed the “dominant” follicle andthe remaining follicles are termed “subordi-nate”.
1.1 Mammalian Ovarian Cycle
The ovaries are part of the reproductive system in femalemammals. The major ovarian structures are follicles andcorpora lutea; these structures are illustrated schematicallyin Figure 1 and an ultrasound image showing examples ofthese structures is shown in Figure 2.
Ovarian follicles are roughly spherical, fluid-filled struc-tures which contain developing oocytes (eggs). The repro-ductive cycle culminates in the rupture of a follicle and re-lease of its egg. The corpus lutem (CL) is a gland that isformed from the remains of the ruptured follicle followingovulation.
Ovarian follicular development is a dynamic processwhich occurs in a wave-like pattern [1, 2, 3, 13, 16]. Agroup of follicles begin growing simultaneously as a cohortat a diameter of 2 to 4 mm (wave emergence). The groupof follicles continues growing for 2 to 3 days. At this time,all follicles in this cohort, save one, begin to regress and de-generate while the dominant follicle continues preferentialdevelopment. It has been shown that cattle and women mayhave either two or three waves of follicular activity per cy-cle. In both 2- and 3-wave growth patterns, the dominantfollicle of the final wave ovulates, while dominant folliclesof earlier waves ultimately regress and degenerate in a pro-cess known as atresia. All subordinate follicles in each fol-licular wave ultimately become atretic. Follicles within awave either ovulate, or degenerate; follicles do not regress
Dominant Follicle
Subordinate Follicles
Corpus Luteum
Figure 2. Ultrasound image of a bovine ovarywith major structures identified.
at the end of one wave, and then re-emerge in a subsequentwave. [1, 2, 3, 12, 16]. Figure 3 illustrates normal folliclegrowth and decline over a single wave.
In two-wave cycles, the first wave typically emerges onthe day of ovulation, denoted day 0. The dominant folli-cle is selected around day 3 and continues to develop andgrow, while the remaining subordinate follicles in the cohortregress and degenerate. The dominant follicle reaches itsmaximal diameter around day 6, remains static for a time,and begins to degenerate around day 9 or 10. At this time, asecond wave of new follicles emerges. The dominant folli-cle from this second cohort ovulates at the end of the cycleat around day 21 and the subordinate follicles regress anddegenerate, as in the first wave. A new reproductive cyclebegins if pregnancy is not established. This process is illus-trated in Figure 4 and is described in more detail in [8, 9].Due to the wave-like follicular growth, the size of the domi-nant follicle, the size of the two largest subordinate follicles,and the total number of subordinate follicles will be usefulfeatures for distinguishing between the metestrus, diestrusand proestrus phases.
Following ovulation, the wall of the ruptured follicleforms a structure called the corpus luteum. The CL passesthrough a period of initial growth (metestrus), followedby a period of maximal size and function (diestrus), andthen enters a period of regression and ultimate demise(proestrus/estrus) preceding the next ovulation [13, 23].The mean diameter of the CL [26] over the estrous cycle isshown in Figure 4. Thus, the size of the CL is also a usefulfeature for reproductive phase discrimination. The relation-ship between the day in the estrous cycle and the sizes ofthe main structures of the ovary has been studied in detail
2

2
4
6
8
10
12
14
16
Day of Follicular Wave0 1 2 3 4 5
Follicle diameter(mm)
Dominant Follicle
Subordinate follicles
ovulation
regression
6
Wave Pattern
Figure 3. A schematic illustration of wave-like follicle growth. A group of follicles startgrowing simultaneously. After 2 or 3 days,all subordinate follicles cease growing andbegin to regress. The dominant follicle con-tinues growing until it either ovulates (finalwave behavior) or starts regressing (interme-diate wave behavior).
[8, 9, 10, 14].In this study, an algorithm was developed for classifi-
cation of bovine ovaries as belonging to either metestrus,diestrus, or proestrus phases based on a single day’s exam-ination. The estrus phase is not considered due to its shortduration and lack of available data.
1.2 Motivation
Monitoring reproductive cycles in mammals can be usedto detect follicle wave emergence and to determine whetheran animal is pre- or post-selection of a dominant preovu-latory follicle. The ability to determine the current re-productive phase of an animal automatically from a singleday’s examination would enable rapid decisions to be madewhether to begin monitoring the animal daily in order todetermine dominant follicle selection, facilitate the divisionof a livestock herd into reproductively active or unrespon-sive factions, aid in the determination of optimal timing forinitiation of drug treatments to obtain gametes for use in as-sisted reproduction protocols and to determine the effects ofother drugs on reproductive function.
In addition, excised bovine ovaries obtained from abba-toirs are routinely used for in vitro fertilization and embryoproduction. Automated classification of these ovaries intodifferent estrous cycle phases will help in obtaining uniformgroups of oocytes for commercial and scientific purposes.
1.3 Classification Methods
Two pattern recognition methods were used to testthe hypothesis that ultrasound-detected features of bovine
Days in the cycle
0 2 3
D3W14 5 6 7 8 9 10
D1W2 D>1711 12 13 14 15 16 17 18 19 20 211
Dominant Follicle
Subordinate follicles
ovulation
regression
Subordinate follicles
Dominant Follicle
metestrus diestrus proestrus
4
8
6
18
22
20
12
10
16
14
Corpus LuteumDia
me
ter (
mm
)
26
28
24
Figure 4. Schematic representation of folliclewave growth in a 2-wave cycle. Variation indiameter of the corpus luteum through thecycle is also shown.
ovaries can be used to classify ovaries by phase of the es-trous cycle.
The decision tree algorithm is a procedure that partitionsa decision into a series of simpler decisions at each node.This method does not necessarily use all of the availablefeatures. At each tree node, different questions about certainfeatures may be evaluated. It has been shown that decisiontrees generalize well and can be used to solve a wide rangeof problems and efficiently classify new samples [5, 21, 27,28, 29].
The Bayes Decision Classifier is a statistical patternrecognition technique that assigns an input pattern to theclass to which it most likely belongs. This classifier isbased on Bayes’ rule of conditional probabilities [4, 5, 21,27]. Bayes classification requires knowledge about theclasses, since it makes use of prior probabilities and class-conditional probabilities. In our experiments, we used aNaıve Bayes Classifier [5, 21].
2 Materials and Methods
2.1 Image Data Sets
The image data set described herein was obtained fromprevious studies by Singh et. al. [24, 25]. For each an-
3

imal, both the left and right ovaries were ovariectomized(surgically removed). Three dimensional ultrasonographicvolumes of ovaries were imaged in vitro in parallel planesat 0.5mm increments with a broad-band, convex-array, ul-trasound transducer interfaced with a ATL Ultra Mark 9HDI ultrasound machine (Advanced Technology Laborato-ries, Brothell, WA). All images were 640 × 480 pixel 8-bitgrayscale. The ovaries used in this study were collectedand imaged on day 3 (day 0 = day of previous ovulation) ofwave 1 (D3W1), day 1 of wave 2 (D1W2) and after onset ofproestrus (D≥17) corresponding to the metestrus, diestrus,and proestrus phases respectively [25]. A total of 45 pairsof ovaries (left and right ovaries of one animal) were used inthe current study, and were divided into training and testingdata sets.
The training data set (data set A) consisted of 23 pairs ofovaries ovariectomized during metestrus (n = 8, D3W1),diestrus (n = 7, D1W2), and proestrus (n = 8, D≥17).These animals exhibited both 2 and 3 wave patterns; 19 ex-hibited a 2-wave pattern and 4 exhibited a 3-wave pattern.
The testing data set (data set B) consisted of a differ-ent group of 22 pairs of ovaries ovariectomized duringmetestrus (n = 8, D3W1), diestrus, (n = 6, D1W2) andproestrus (n = 8, D ≥ 17). 20 of these animals exhibited a2-wave pattern and 2 exhibited a 3-wave pattern.
Both data sets were accompanied by a full set ofschematic diagrams containing all of the information aboutthe main structures inside both ovaries (size and locationof the dominant and subordinate follicles and CL) whichwas recorded daily from ultrasound examinations that com-menced from the day of the last ovulation (day 0) until theday of the ovariectomy and complete in vitro imaging.
2.2 Feature Selection and Extraction
The discussion of the wave theory of folliculogenesis inSection 1 illustrated why dominant follicle size, subordi-nate follicle sizes, and CL size, are key features in distin-guishing between phases of the estrous cycle. Therefore,the features chosen to describe the current estrous phase ofthe ovary were size of the largest follicle (over both left andright ovaries), sizes of the largest and second-largest subor-dinate follicles (over both left and right ovaries), size of theCL, and total number of subordinate follicles ≥ 2mm. Thesizes of follicles and CL were defined as the mean of thelengths of their major and minor axes.
Features were extracted from data set A by manuallymeasuring the diameter of the largest follicle in the ultra-sound images. The slice containing the largest follicle areawas located and the lengths of the major and minor axes ofthe follicle within that slice measured. The diameter (D)was taken as the mean of these two values. The remainingfeatures, diameter of first subordinate follicle (S1), diame-
ter of the second subordinate follicle (S2), diameter of theCL (CL) and number of follicles (NF) were obtained fromthe schematic diagrams. For data set B, all features wereobtained from the schematic diagrams.
The automated extraction of these features from imageshas been the subject of past and current work. At present,it is not possible to extract all of these features automat-ically, reliably, and accurately. Follicle segmentation al-gorithms have been proposed [11, 18, 19, 22], the best ofwhich [19] can recognize follicles with mean sensitivity of0.78, but includes a significant number of false positives(mean specificity was 0.71). There are no known segmenta-tion algorithms for the CL, however, this is a topic of currentresearch. A robust automatic segmentation algorithm forovarian structures would enable the classification problemconsidered herein to be solved without human intervention.
2.3 Classifier Design
Two classifiers were implemented and their perfor-mances compared. A decision tree classifier was con-structed using the C4.5 decision tree generation algorithm(an improved divide and conquer approach to decision treeinduction) which is based on the ID3 algorithm [20]. Thismethod uses the information gain criterion to select the bestfeature on which to base a decision at a given node. Thesplit value was calculated using the Gini coefficient, whichis a measure of inequality [29].
A Naıve Bayes classifier was implemented to use theminimum error rate decision rule [5]. Uniform prior prob-abilities were used and the class-conditional probabilitieswere assumed to have a normal distribution [5, 21, 28].
2.4 Experiment 1
For experiment 1, both the decision tree and Naıve Bayesclassifiers were trained using data set A and tested usingdata set B. The mean feature values from data sets A andB are shown in Figure 5. The graph expresses the meandiameter in millimeters of D, S1, S2, and CL and their stan-dard deviations. In the case of the NF (number of follicles)feature, the value is dimensionless.
2.5 Experiment 2
For experiment 2, the patterns for animals that exhibiteda 3-wave pattern were removed from data sets A and B toform data sets A′ and B′ respectively. For data set A, 4samples in the D≥17 class were removed leaving 8 patternsfrom D3W1, 7 patterns from D1W2 and 4 patterns fromD≥17; a total of 19 patterns. For data set B, 2 samplesin class D≥17 exhibiting a 3-wave pattern were removed,
4

0
5
10
15
20
25
D S1 S2 CL NF
D!17
0
5
10
15
20
25
D S1 S2 CL NF
D!17
Data Set A
Experiment 1
Data Set B
0
5
10
15
20
25
D S1 S2 CL NF
D1W2
0
5
10
15
20
25
D S1 S2 CL NF
D3W1
0
5
10
15
20
25
D S1 S2 CL NF
D1W2
0
5
10
15
20
25
D S1 S2 CL NF
D3W1
Dia
me
ter
(mm
)D
iam
ete
r (m
m)
Figure 5. Mean feature values and standarddeviations for data sets A (top) and B (bot-tom) for Experiment 1. All features are mea-sured in millimeters, except for NF which isdimensionless.
leaving 8 patterns from D3W1, 6 patterns from D1W2 and6 patterns from D≥17; a total of 20 patterns.
The decision tree and Naıve Bayes classifiers were thentrained using the data set A′, and tested using data set B′.The mean feature values of this experiment are expressedin Figure 6 for the data set A′ and data set B′. The graphexpresses the mean diameter in millimeters of D, S1, S2,and CL. In the case of the NF feature, the value is dimen-sionless. From the figures, there is not a notable differencebetween data set A and data set A′ and data set B and dataset B′ respectively due to the small number of patterns thatpresented a 3-wave pattern and the fact that the 3-wave ani-mals belong only to the D≥17 classes.
There were a number of unavoidable potential sourcesof error when extracting the features used in this study fromonly single pair of images of an animal’s ovaries. The sizesof the follicles were considered regardless of whether theywere in their growing or regressing process since one can-not differentiate a growing dominant follicle from a regress-ing dominant follicle based on a single day’s examination.From Figures 5 and 6, it can be seen that the mean size ofthe first subordinate follicle (S1) in class D1W2 has a largevalue compared to the expected value illustrated in Figure 4,which suggests that some of the S1 measurements for class
0
5
10
15
20
25
D S1 S2 CL NF
D!17
0
5
10
15
20
25
D S1 S2 CL NF
D1W2
0
5
10
15
20
25
D S1 S2 CL NF
D!17
0
5
10
15
20
25
D S1 S2 CL NF
D1W2
Data Set A’
Experiment 2
Data Set B’
Dia
me
ter
(mm
)D
iam
ete
r (m
m)
0
5
10
15
20
25
D S1 S2 CL NF
D3W1
0
5
10
15
20
25
D S1 S2 CL NF
D3W1
Figure 6. Mean feature values and standarddeviations for data sets A′ (top) and B′ (bot-tom) for Experiment 2. All features are mea-sured in millimeters, except for NF which isdimensionless.
D1W2 may in fact have been measurements of the futuredominant follicle of wave 2. Similarly some of the S2 val-ues recorded for class D1W2 could have resulted from thefuture first subordinate follicle of wave 2. For the D≥17class, the size of the mean for the S1 feature suggests thatsome values may have resulted from the regressing domi-nant follicle of wave 1. Similarly, some of the S2 measure-ments could be the size of the first subordinate follicle ofwave 2. Section 3 shows that our classifier performed rea-sonably well, despite the potential sources of error arisingfrom collecting features from only a single pair of images.Moreover, it is necessary to design a classifier that is robustto these errors since they will be unavoidable in practice;a single snapshot of an ovary in time may contain both re-gressing follicles from one wave and growing follicles fromthe subsequent wave.
3 Results
3.1 Experiment 1
For experiment 1, Both classifiers were trained usingdata set A and tested with data set B.
5

Table 1. Experiment 1: Confusion Matrix re-sulting from the classification of data set Bby the decision tree classifier in Figure 7. Theclassification rate was 100%.
Classified as: D3W1 D1W2 D≥17 TotalD3W1 8 0 0 8D1W2 0 6 0 6D≥17 0 0 8 8
3.1.1 Decision Tree Classifier
The decision tree derived from the C4.5 algorithm is illus-trated in Figure 7. Elliptical nodes are internal nodes whichrepresent nodes where a choice of following the left or rightbranch is made based on the threshold of a particular featurein the pattern. For example, the root node indicates that theleft branch is taken if the diameter of the CL is less than orequal to 18mm. The classification proceeds from top to bot-tom, starting from the root node (CL). Left or right branchesare made at each decision node depending on the value ofthe feature in the given pattern. Rectangular nodes are leafnodes. When a leaf node is encountered, the pattern is as-signed to the class corresponding to that leaf node. It is no-table that the inference algorithm determined that only twofeatures from the training patterns were needed. This im-plies that the most discriminating of the features chosen arediameter of the CL and diameter of the dominant follicle.
The confusion matrix for the classification of data set Bis shown in Table 1. The rows and columns of the confusionmatrix are indexed by the three classes D3W1, D1W2 andD≥17. The value of entry (i, j) in the matrix indicates thenumber of samples of class i that were classified as class j;thus, the desired result is a diagonal matrix. The last columnrepresents the total number of tested instances per class.
The classification rate is defined as the percentage ofpatterns that were classified correctly. The classificationrate of the Decision Tree Classifier for Experiment 1 was100% (22 of 22 patterns were classified correctly). This isan excellent result as it suggests that extremely high clas-sification rates can be achieved through a decision tree thatmakes only two comparisons in the worst case, and requiresonly two features to be extracted from the input images.
3.1.2 Naıve Bayes Classifier
For the Bayes Classifier, the features were considered to beconditionally independent, also known as the Naıve BayesRule. The class-conditional probabilities were assumed tobe normal. The probability density function for a normal
CL
D
Experiment 1: Decision Tree
D3W1 D !17
D1W2
"18 >18
"12 >12
Figure 7. Experiment 1: The decision tree in-ferred from data set A.
distribution with mean µ and standard deviation σ is ex-pressed in equation 1 [5, 21, 28].
f(x) =1√2πσ
exp[− (x− µ)2
2σ2
](1)
The mean µ and standard deviation σ of each featurewere estimated from the set of values of the feature occur-ing in the training vectors. Prior probabilities were assumedto be uniform, although, in reality, the diestrus phase is typ-ically longer than the others – a fact that might warrant theuse of non-uniform prior probabilities if this system wereused to classify animals randomly chosen from a herd.
The performance of the Naıve Bayes classifier was eval-uated using data set B. The resulting confusion matrix isshown in Table 2. The matrix shows that 19 instances wereclassified correctly and 3 classified incorrectly for a classi-fication rate of 86.36%. All instances of the D3W1 classwere classified correctly, however, the classifier misclassi-fied two D1W2 instances, and one D≥17 instance.
3.2 Experiment 2
For experiment 2, both classifiers were trained with dataset A′ and tested with data set B′ from which samples aris-ing from animals with a 3-wave follicular growth patternwere eliminated.
3.2.1 Decision Tree Classifier
The decision tree inferred from data set A′ was identical tothe decision tree of Experiment 1 (see Figure 7). The De-cision Tree Classifier performance was evaluated using the
6

Table 2. Experiment 1: Confusion Matrix re-sulting from the classification of data set Bby a Naıve Bayes classifier with normal class-conditional probability distributions. Theclassification rate was 86.36%.
Classified as: D3W1 D1W2 D≥17 TotalD3W1 8 0 0 8D1W2 1 4 1 6D≥17 0 1 7 8
Table 3. Experiment 2: Confusion matrix forthe Naıve Bayes classifier with normal class-conditional probability distributions usingdata Set B′ as the testing set. The classifi-cation rate was 90%.
Classified as: D3W1 D1W2 D≥17 TotalD3W1 7 0 1 8D1W2 1 5 0 6D≥17 0 0 6 6
data set B′ and 100% of the patterns were classified cor-rectly.
3.2.2 Naıve Bayes Classifier
The class-conditional probability distributions were esti-mated using data set A′ with the same procedure used inExperiment 1. The performance of the classifier was eval-uated using data set B′. The resulting confusion matrix isshown in Table 3. The matrix shows that 90% (18 of 20)patterns were classified correctly. All instances for D≥17class were classified correctly while D3W1 and D1W2 hadone misclassification each and were classified as D≥17 andD3W1 respectively. Interestingly, the 3-wave patterns thatwere eliminated for this experiment were in fact classifiedcorrectly in experiment 1, which suggests the 2-wave and3-wave patterns were not confused during the classificationand presented similar characteristics.
4 Summary and Conclusion
The results of the present study support the hypothesisthat the estrous phase of an animal of the bovine species canbe automatically and robustly determined from ultrasound-detected features based on a single day’s examination. The
performance of the decision tree classifier in both experi-ments indicates that the D and CL features alone comprisesufficient information for accurate classification.
Experiment 1 was trained with the data set A and testedwith the data set B using animals with 2 and 3 wave patterns.The decision tree classifier performed perfectly, classifyingall instances correctly. The decision tree used only the CLand D features for the classification. The size of the CLis generally larger in the D1W2 (diestrus) class ('23.2mmfor data set A and '22mm for data set B) and smaller inclasss D3W1 (metestrus, '14.25mm for data set A and'14.88mm for data set B) and D≥ 17 (proestrus, '16mmfor data set A and '14.12mm for data set B). The NaıveBayes classifier classified 86.36% of the instances correctly(n=19) and 13.64% incorrectly (n=3).
Experiment 2 was trained with the data set A′ and testedwith the data set B′ which included only animals that exhib-ited a 2-wave pattern. The decision tree classifier classified100% of the instances correctly. The Naıve Bayes classifierexhibited a similar performance compared with experiment1, classifying 90% of the instances correctly. This exper-iment suggested that the extraction of 3-wave patterns didnot eliminate any error or improve the performance signifi-cantly. Moreover in experiment 1, the 3-wave patterns wereclassified correctly, which suggests that both growth pat-terns patterns presented similar characteristics on the daysof ovariectomy. Evaluation of the classifiers using a largerdata set is required to fully demonstrate their insensitivityto two- and three-wave patterns of follicular growth. Thiswould achieve an important level of robustness since it isnot currently possible to determine whether an animal ex-hibits a 2 or 3 wave pattern without daily examination.
The success of the decision tree classifier based on onlytwo features is somewhat surprising, given the errors thatcan arise in feature extraction due to the potential presenceof follicles belonging to different waves in a single image.The largest follicle from an image acquired during the latemetestrus phase (see Figure 4) may in fact be the dominantfollicle of an emerging second wave since there is signif-icant variance in the actual day of wave emergence. Thatsuch a simple decision tree solves such an apparently com-plicated classification problem so well is rather astonishingand offers the potential for extremely fast, reliable, and con-sistent automatic decision making.
The work herein constitutes the third stage of what couldbecome a fully automated system for determining the cur-rent reproductive phase of mammals on the basis of a singleultrasound examination. The first stage of such a systemwould be the segmentation of the relevant ovarian struc-tures. If the size of the dominant follicle and size of theCL are a sufficiently rich feature set, then the follicle seg-mentation problem can be solved fairly easily. Potocnik re-ported that his algorithm correctly segments nearly 100% of
7

large follicles greater than 10mm [19]. Segmentation of theCL is the subject of current research. For the second step,one need only recognize the largest follicle, and measure itsdiameter. Thus, if future work can achieve a robust segmen-tation algorithm for the CL, the entire process could be fullyautomated.
5 Acknowledgements
This study was supported by grants from the Natural Sci-ences and Engineering Research Council of Canada, theCanadian Institutes of Health Research, and the Universityof Saskatchewan.
References
[1] G. Adams and R. Pierson. Bovine model for study of ovarianfollicular dynamics in humans. Theriogenology, 43:113–120, 1995.
[2] A. Baerwald, G. Adams, and R. Pierson. Characterizationof ovarian follicular wave dynamics in women. Biology ofReproduction, 69:1023–1031, 2003.
[3] A. Baerwald, G. Adams, and R. Pierson. A new model forovarian follicular development during the human menstrualcycle. Fertility and Sterility, 80(1):116–122, July 2003.
[4] P. A. Devijver and J. Kittler. Pattern Recognition: A Statis-tical Approach. Prentice Hall International, 1982.
[5] R. O. Duda, P. E. Hart, and D. G. Stork. Pattern Classifica-tion. John Wiley & Sons, second edition, 2001.
[6] O. Ginther. Ultrasonic Imaging and Animal Reproduction:Fundamentals (Book 1). Equiservices Publishing, 1995.
[7] O. Ginther. Ultrasonic Imaging and Animal Reproduction:Horses (Book 2). Equiservices Publishing, 1995.
[8] O. Ginther, J. Kastelic, and L. Knopf. Composition and char-acteristics of follicular waves during the bovine estrous cy-cle. Animal Reproduction Science, 20:187–200, 1989.
[9] O. Ginther, J. Kastelic, and L. Knopf. Intraovarian rela-tionships among dominant and subordinate follicles and thecorpus luteum in heifers. Theriogenology, 32(5):787–795,1989.
[10] O. Ginther, L. Knopf, and J. Kastelic. Temporal associa-tions among ovarian events in cattle during oestrous cyclewith two and three follicular waves. Reproduction Fertility,87:223–230, 1989.
[11] A. Krivanek, W. Liang, G. Sarty, R. Pierson, and M. Sonka.Automated follicle analysis in ovarian ultrasound. MedicalImaging, Proceedings of SPIE, 3338:588–596, 1998.
[12] R. Pierson and G. Adams. Computer-assisted image anal-ysis, diagnostic ultrasonography and ovulation induction:Strange bedfellows. Theriogenology, 43:105–112, 1995.
[13] R. Pierson and O. Ginther. Ultrasonography of the bovineovary. Theriogenology, 21:495–504, 1984.
[14] R. Pierson and O. Ginther. Follicular populations during theestrous cycle in heifers: Part I. influence of day. AnimalReproduction Science, 124:165–176, 1987.
[15] R. Pierson and O. Ginther. Reliability of diagnostic ultra-sonography for identification and measurement of folliclesand detecting corpus luteum in heifers. Theriogenology,29:21–37, 1987.
[16] R. Pierson and O. Ginther. Follicular populations duringthe estrous cycle in heifers: Part III. time of selection ofovulatory follicle. Animal Reproduction Science, 16:81–95,1988.
[17] R. Pierson and O. Ginther. Ultrasonic imaging of the ovariesand uterus in cattle. Theriogenology, 29:21–37, 1988.
[18] B. Potocnik. Automated ovarian follicle segmentation usingregion growing. In First Int’l workshop on Image and SignalProcessing and Analysis, pages 157–162, 2000.
[19] B. Potocnik and D. Zazula. Automated analysis of a se-quence of ovarian ultrasound images. Part I: segmentationof single 2D images. Image and Vision Computing, 20:217–225, 2002.
[20] J. R. Quinlan. Induction of Decision Trees. Morgan Kauf-mann, 1990. Originally published in Machine Learning1:81–106, 1986.
[21] S. Russell and P. Norvig. Artificial Intelligence A ModernApproach. Prentice Hall, second edition, 2003.
[22] G. Sarty, W. Liang, M. Sonka, and R. Pierson. Semiauto-mated segmentation of ovarian follicular ultrasound imagesusing knowledge-based algorithm. Ultrasound in Medicineand Biology, 24(1):27–42, 1998.
[23] J. Singh. Bovine Ovary: Morphologic and Biochemical Ki-netics. PhD thesis, University of Saskatchewan, 1997.
[24] J. Singh, R. Pierson, and G. Adams. Ultrasound image at-tributes of bovine corpus luteum: Structural and functionalcorrelates. Journal of Reproduction and Fertility, 109:35–44, 1997.
[25] J. Singh, R. Pierson, and G. Adams. Ultrasound image at-tributes of bovine ovarian follicles and endocrine and func-tional correlates. Journal of Reproduction and Fertility,112:19–29, 1998.
[26] J. Tom, R. Pierson, and G. Adams. Quantitative echotextureanalysis of bovine corpora lutea. Theriogenology, 49:1345–1352, 1998.
[27] A. R. Webb. Statistical Pattern Recognition. John Wiley &Sons, second edition, 2002.
[28] I. H. Witten and E. Frank. Data Mining, Practical MachineLearning Tools and Techniques. Morgan Kaufmann Publish-ers, second edition, 2005.
[29] N. Ye. The Handbook of Data Mining. Lawrence ErlbaumAssociates Publishers, 2003.
8