
Adaptive Enhanced Genetic Algorithm-Based Proportional Integral Controller Tuning for pH Process
18
This article was downloaded by:[Radhakrishnan, T. K.] On: 29 October 2007 Access Details: [subscription number 783061982] Publisher: Taylor & Francis Informa Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK Instrumentation Science & Technology Publication details, including instructions for authors and subscription information: http://www.informaworld.com/smpp/title~content=t713597258 Adaptive Enhanced Genetic Algorithm-Based Proportional Integral Controller Tuning for pH Process K. Valarmathi a ; D. Devaraj a ; T. K. Radhakrishnan a a Chemical Engineering Department, National Institute of Technology, Tiruchrappalli, India Online Publication Date: 01 November 2007 To cite this Article: Valarmathi, K., Devaraj, D. and Radhakrishnan, T. K. (2007) 'Adaptive Enhanced Genetic Algorithm-Based Proportional Integral Controller Tuning for pH Process', Instrumentation Science & Technology, 35:6, 619 - 635 To link to this article: DOI: 10.1080/10739140701651607 URL: http://dx.doi.org/10.1080/10739140701651607 PLEASE SCROLL DOWN FOR ARTICLE Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf This article maybe used for research, teaching and private study purposes. Any substantial or systematic reproduction, re-distribution, re-selling, loan or sub-licensing, systematic supply or distribution in any form to anyone is expressly forbidden. The publisher does not give any warranty express or implied or make any representation that the contents will be complete or accurate or up to date. The accuracy of any instructions, formulae and drug doses should be independently verified with primary sources. The publisher shall not be liable for any loss, actions, claims, proceedings, demand or costs or damages whatsoever or howsoever caused arising directly or indirectly in connection with or arising out of the use of this material.
-
Upload
kalasalingam -
Category
Documents
-
view
3 -
download
0
Transcript of Adaptive Enhanced Genetic Algorithm-Based Proportional Integral Controller Tuning for pH Process

This article was downloaded by:[Radhakrishnan, T. K.]On: 29 October 2007Access Details: [subscription number 783061982]Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK
Instrumentation Science &TechnologyPublication details, including instructions for authors and subscription information:http://www.informaworld.com/smpp/title~content=t713597258
Adaptive Enhanced Genetic Algorithm-BasedProportional Integral Controller Tuning for pH ProcessK. Valarmathi a; D. Devaraj a; T. K. Radhakrishnan aa Chemical Engineering Department, National Institute of Technology, Tiruchrappalli,India
Online Publication Date: 01 November 2007To cite this Article: Valarmathi, K., Devaraj, D. and Radhakrishnan, T. K. (2007)'Adaptive Enhanced Genetic Algorithm-Based Proportional Integral Controller Tuningfor pH Process', Instrumentation Science & Technology, 35:6, 619 - 635To link to this article: DOI: 10.1080/10739140701651607
URL: http://dx.doi.org/10.1080/10739140701651607
PLEASE SCROLL DOWN FOR ARTICLE
Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf
This article maybe used for research, teaching and private study purposes. Any substantial or systematic reproduction,re-distribution, re-selling, loan or sub-licensing, systematic supply or distribution in any form to anyone is expresslyforbidden.
The publisher does not give any warranty express or implied or make any representation that the contents will becomplete or accurate or up to date. The accuracy of any instructions, formulae and drug doses should beindependently verified with primary sources. The publisher shall not be liable for any loss, actions, claims, proceedings,demand or costs or damages whatsoever or howsoever caused arising directly or indirectly in connection with orarising out of the use of this material.

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
Adaptive Enhanced GeneticAlgorithm-Based Proportional Integral
Controller Tuning for pH Process
K. Valarmathi, D. Devaraj, and T. K. Radhakrishnan
Chemical Engineering Department, National Institute of Technology,
Tiruchrappalli, India
Abstract: The control of a pH process is a challenging task. For the pH process, Pro-
portional Integral (PI) control has been successfully used for many years. Tuning of the
PI controller is necessary for the satisfactory operation of the system. This paper
presents an Enhanced Genetic Algorithm (EGA) for the tuning of PI controllers. To
avoid the premature convergence and to reduce the computation time, advanced
genetic operators have been used in the proposed GA approach. The proposed GA
tuned PI controller is implemented in the experimental pH process. The performance
of the controller with Enhanced GA tuning is compared with traditional Ziegler
Nichols tuning and Internal Model Control for various set point and trajectory
responses of the pH process. The experimental results show that the proposed GA is
very much capable to adapt the controller to dynamic plant characteristics changes
in pH process.
Keywords: PI controller, Genetic algorithm, Nonlinear, pH process, IMC, ZN tuning
INTRODUCTION
The regulation and control of a pH process is a typical problem found in a
variety of industries, including pharmaceuticals, biotechnology, and chemical
processing. It is a non-trivial task arising from the non-linearity of the
titration process. High performance and robust pH control is often difficult to
achieve due to its nonlinear characteristics.
Address correspondence to T. K. Radhakrishnan, Chemical Engineering Depart-
ment, National Institute of Technology, Tiruchrappalli, India. E-mail: [email protected]
Instrumentation Science and Technology, 35: 619–635, 2007
Copyright # Taylor & Francis Group, LLC
ISSN 1073-9149 print/1525-6030 online
DOI: 10.1080/10739140701651607
619

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
Numerous schemes have been employed to handle this non-linear
process, which includes the simple PID for regulation,[1] self-tuning
adaptive control,[2] linearising control and model-based control schemes.[3]
In the simple PID controller, the Ziegler-Nichols tuning procedure works
quite well, but this method is laborious and time consuming, particularly for
processes with large time constants or delays.[4] In linearising control, the
main idea is to transform the non-linear states to other states that are linear;
control of the pH is then achieved through these states. This method is
referred to as the strong base equivalent scheme. While it is possible to
achieve good control, this scheme requires full knowledge of the process.[5]
The non-linear control methods include the reference control structure and
the non-linear adaptive control proposed by Henson and Seborg.[6]
De Leon-Morales[7] proposed observer-based controllers using singular per-
turbations theory and differential algebra for position and speed control of a
single flexible joint robot manipulator. Assawinchaichote[8] described a
fuzzy observer based controller for a non-linear system. The observer-based
controller has a stabilization problem for linear singular systems; it needs a
modification of singular systems. In the non-linear adaptive control, input-
output linearization is attained but, in a practical approach, it requires
knowledge of the states’ variables.
A number of classical optimization techniques, such as a gradient method
and a point estimation method[9] are often used to find optimal values. These
optimization methods obtain PID parameters by optimizing an Integral
Square Error (ISE), Integral Absolute Error (IAE), and Integral Time Square
Error (ITSE) performance index. In all of these, tuning is obtained around an
operating point where the model can be considered to be linear. This implies
that there is sub-optimal tuning when a process operates outside the validity
zone of the model. This situation is common when the reference is not a set
point, but a trajectory response. Recently, Evolutionary Computation techniques
have been proposed to tune the PID controller by taking into account all non-
linearities and additional process characteristics. Oliveira et al.[10] used a
standard GA to determine initial estimates for a variety of classes of linear
time-invariant (LTI) systems, encompassing minimum phase, non-minimum
phase, and unstable systems. In an independent enquiry, Porter and Jones[11]
proposed a GA-based technique as a simple, generic method of tuning digital
PID controllers. Wang and Kwok[12] tailored a GA using inversion and pre-
selection of ‘micro-operators’ to PID controller tuning. Yeong-Koo et al.[13]
proposed the simple GA coupled with cubic spline interpolation method for
the control of a pH process. Dionisio Pereira[14] proposed system model identi-
fication and PID controller tuning for first order plant. This simple GA concept
led to premature convergence and, also, it takes a long time to reach the
solution. In this paper, the PI controller parameters are first obtained from the
ZN tuning method and these preliminary controller parameters are employed
in the pH process. The optimal controller parameters are computed with the
Enhanced Genetic Algorithm approach and applied to the PI controller.
K. Valarmathi, D. Devaraj, and T. K. Radhakrishnan620
Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
EXPERIMENTAL
System Description and Model Development
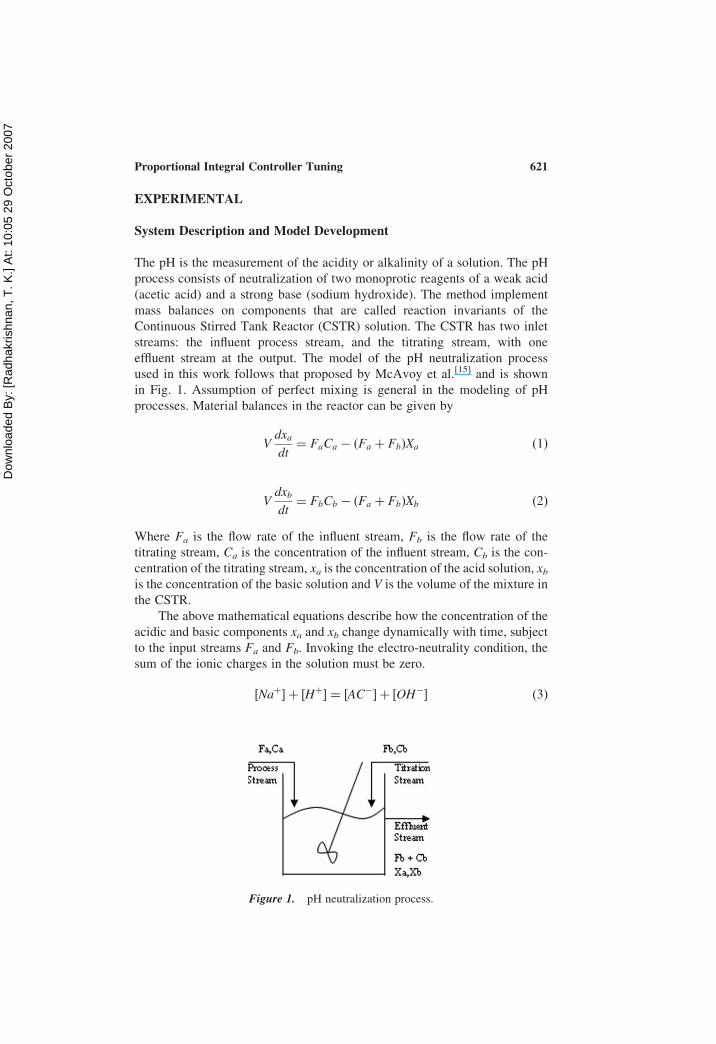
The pH is the measurement of the acidity or alkalinity of a solution. The pH
process consists of neutralization of two monoprotic reagents of a weak acid
(acetic acid) and a strong base (sodium hydroxide). The method implement
mass balances on components that are called reaction invariants of the
Continuous Stirred Tank Reactor (CSTR) solution. The CSTR has two inlet
streams: the influent process stream, and the titrating stream, with one
effluent stream at the output. The model of the pH neutralization process
used in this work follows that proposed by McAvoy et al.[15] and is shown
in Fig. 1. Assumption of perfect mixing is general in the modeling of pH
processes. Material balances in the reactor can be given by
Vdxa
dt¼ FaCa � Fa þ Fbð ÞXa ð1Þ
Vdxb
dt¼ FbCb � Fa þ Fbð ÞXb ð2Þ
Where Fa is the flow rate of the influent stream, Fb is the flow rate of the
titrating stream, Ca is the concentration of the influent stream, Cb is the con-
centration of the titrating stream, xa is the concentration of the acid solution, xbis the concentration of the basic solution and V is the volume of the mixture in
the CSTR.
The above mathematical equations describe how the concentration of the
acidic and basic components xa and xb change dynamically with time, subject
to the input streams Fa and Fb. Invoking the electro-neutrality condition, the
sum of the ionic charges in the solution must be zero.
½Naþ� þ ½Hþ� ¼ ½AC�� þ ½OH�� ð3Þ
Figure 1. pH neutralization process.
Proportional Integral Controller Tuning 621

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
The [X ] denotes the concentration of the X ion. The equilibrium relations also
hold for the water and the acetic acid:
Ka ¼½AC
�
�½Hþ�
HAC½ �ð4Þ
Defining, Xa ¼ [HAC]þ [AC2], Xb ¼ [Naþ] and use of Eqs. (3) and (4),
½Hþ�3þ ½Hþ�
2fKa þ Xbg þ ½Hþ�fKaðXb � XaÞ � Kwg � KwKa ¼ 0 ð5Þ
Let pH ¼ 2log10 [Hþ] and pKa ¼ 2log10 Ka. The titration curve is given by
Xb þ 10�pH � 10�pH�14
�Xa
1þ 10 pKa�pH¼ 0 ð6Þ
Where Ka and Kw are dissociation constant of acetic acid at 258C(Ka ¼ 1.778 � 1025 & Kw ¼ 10214). From Eq. (1), it can be seen that
the CSTR is only mildly non-linear. If the condition Fa � Fb holds, the
dynamics are essentially linear. This assumption is not entirely unreason-
able because, in most situations, the reagents used in the titrating stream
can be adjusted for concentration in such a way that the relationship
holds. If this assumption holds, the CSTR is then essentially governed by
Eq. (l), which reduces to a linear system. Eq. (6), which is strictly static
non-linear relationship between the states xa, xb and the output pH
variable, manifests itself as the familiar titration curve of the neutralization
process.
PI Controller for the pH Process
This section presents tuning of the PI controllers in an industrial chemical
process using Ziegler Nichols and Internal Model Control. It is the type of
feedback controller that makes a plant less sensitive to changes in the sur-
rounding environment and small changes in the plant. A system consisting
of a plant and a controller with unity feedback is shown in Fig. 2. The
Figure 2. Block diagram of a plant with PI controllers.
K. Valarmathi, D. Devaraj, and T. K. Radhakrishnan622

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
controlled output is given by
CðtÞ ¼ KceðtÞ þKc
ti
ðeðtÞdt ð7Þ
Where Kc is the proportional gain and ti is the integral time constant.
Ziegler Nichols Tuning
The PI controller parameters are initially determined by using a conventional
Ziegler-Nichols method. The tuning technique of Ziegler-Nichols is used to
provide a first guess for the PI controller parameters (Kc and ti), which are
then adjusted by trial and error. The Ziegler-Nichols technique is a closed
loop tuning method which is implemented as follows:
1. The feed disturbance flow is fixed at the mean of its range;
2. With the process in open loop, the manipulated variable is manually
adjusted to bring the process to the desired steady-state operating point;
3. A square wave is used to apply small set point changes (typically 0.1 pH
units);
4. The proportional gain is gradually increased until the process oscillates
continuously. This proportional gain is the ultimate gain, KU, and the
period of sustained oscillation is ultimate period Tu;
5. The PI tuning parameters (Kc and ti) are obtained by applying ZN rules.
Internal Model Control (IMC) Method
IMC, which depends on an accurate process model of the process, leads to a
design of a control system that is stable and robust. A process reaction curve
can be obtained by introducing a step change in the acid flow rate. It is one of
the widely followed process identification techniques. This method is used for
identifying the pH model. The process is divided into four zones and, in each
of these zones, a step change is given in both positive and negative directions
and reaction curves are recorded. Skogested[16] proposed an IMC based PI
controller for a first order process. The filter used for the design is
FðsÞ ¼1
ðtcsþ 1Þr; ð8Þ
where tc is the desired closed loop response time. The reaction curves indicate
the process as First Order Plus Time Delay (FOPDT) model with varying
process gains (Kp), time constants (tp), and delays (ud). Skogested approxi-
mates time delay as a first order pade approximation and rearranges it in the
Proportional Integral Controller Tuning 623

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
standard form of a PI controller. The PI controller settings, in this case, are
KcKp ¼tp
ðtc þ uÞand ti ¼ tp: ð9Þ
The PI controller parameters tuned by ZN and IMC are not satisfactory for
the pH process. The ZN tuning method needs frequent tuning for tracking
the pH performance, and IMC is based on approximating the pH process
into a FOPDT model. To avoid this difficulty, GA is capable of locating the
controller settings in the complex pH process.
Overview of the Genetic Algorithm
GA’s search algorithms are based on natural selection and natural genetics.
They draw their search power from the natural ‘law’ of survival of the
fittest. They operate on a string structure (chromosomes), typically, a conca-
tenated list of binary digits representing a coding of the control parameters
(phenotype) of a given problem. The real value of the control parameter,
encoded in a gene, is called an allele.[17] GA consists of three fundamental
operators, i.e., reproduction, crossover, and mutation. GA can be implemented
by using the following sequence of steps:
1. A chromosomal representation of solution to the problem.
2. Creation of an initial population of solutions.
3. Evaluation of a function that plays the role of the environment, rating
solution in terms of their fitness.
4. Choice of a set of operators used to manipulate the genetic composition of
the population.
5. Determination of parameter values used in GA (population size, probabil-
ities of applying genetic operators).
The GA repeats the above steps until predetermined criteria are met. The
criteria could be a certain number of generations and/or a value for the
maximum fitness. When the solution is obtained, the binary string is
decoded to its corresponding real value. The GA searches a population of
points instead of a single solution. The GA is not easily sidetracked to
obtain a local optimal solution instead of a global optimal solution. It
doesn’t need information about the system, except for the fitness function.
Enhanced Genetic Algorithm (EGA)
The most important issues in the genetic evolution are the effective rearrange-
ment of the genotype information. In Simple Genetic Algorithm (SGA), cross
over is the main genetic operator for the exploitation of information, while
K. Valarmathi, D. Devaraj, and T. K. Radhakrishnan624

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
mutation brings new non-existent bit structures. This SGA scheme is capable
of locating the neighborhood of the optimal or near optimal solutions but, in
general, requires a large number of generations to converge. This problem
becomes more intense for large-scale optimization problems with difficult
search spaces and lengthy chromosomes, where the possibility for the SGA
to become trapped in local optima increases and the convergence speed of
the SGA decreases. At this point, a suitable combination of the basic,
advanced, and problem specific genetic operators must be introduced in
order to enhance the performance of the GA. Advanced and problem-
specific operators usually combine local search techniques and expertise
derived from the nature of the problem. All problem specific operators
introduce random modification to all chromosomes; this proves to have
better fitness. It replaces the original one with the new. All problem specific
operators are applied with a probability of 0.2. The following problem
specific operators have been proposed in Reference [18].
1. Gene cross swap operator (GCSO): This operator randomly selects two
different chromosomes from the population and two genes, one from every
selected chromosome, and swaps their values, as shown in Fig. 3. While
crossover exchanges information between high-fit chromosomes, the GCSO
searches for alternative alleles, exploiting information stored even in low fit
strings.
2. Gene inverse operator (GIO): This operator acts like a sophisticated
mutation operator. It randomly selects one gene in a chromosome and
inverts its bits values from one to zero and vice versa, as shown in Fig. 4.
The GIO searches for bit-structures of improved performance exploits new
areas of the search spaces far away from the current solution, and retains
the diversity of the population.
In the enhanced GA shown in Fig. 5, after the application of the basic
genetic operators, the advanced and problem specific operators are applied to
produce the new generation. All chromosomes in the initial population are
Figure 4. Gene inverse operator.
Figure 3. Gene cross swap operator.
Proportional Integral Controller Tuning 625

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
created at random. Due to the decoding process, the corresponding control
variables of the initial population satisfy their upper-lower bound. Population
statistics are then used to adaptively change the crossover and mutation prob-
abilities. If premature convergence is detected, the mutation probability is
increased and the crossover probability is decreased. This happens in the case
of high population diversity.
Genetic Algorithm Implementation
Use of GA is a rapidly expanding area in control systems design. A genetic
tuning algorithm usually starts with no knowledge of the correct solution
and depends on the responses from its environment to give an acceptable
result. It has been shown that genetic algorithms are capable of locating
optimal regions in complex domains, avoiding the difficulties, or even
erroneous results in some cases, associated with the gradient descent
methods and with high-order systems. The enhanced GA can be performed
with an elitist approach, which means that a solution cannot degrade from
one generation to the next, but that the best individual of a generation is
copied to the next generation without any changes being made to it. A
binary GA is implemented with the matching binary crossover and binary
Figure 5. Enhanced genetic algorithm.
K. Valarmathi, D. Devaraj, and T. K. Radhakrishnan626

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
mutation functions. Individuals of the first generation are generated at random.
Boundaries are set for the generated PI constants. These boundaries are found
experimentally from Z-N method. To obtain the PI tuning parameters, one
usually has to minimize a performance index. The performance index MSE
is used as the basis of the fitness function. It maximizes the fitness function,
whereas the MSE needs to be minimized.
Each individual in the population represents the parameters of the PI con-
trollers. The elements of that solution consist of all the control variables in the
system. For the pH process, the controller parameters are Kp and Ki, where
Ki ¼ Kc/ti. The PI controller parameters are transformed to a finite string
using a binary coding. For example, Kp and Ki all have 10 bits and form a
binary string as:
S ¼ 101 01010111|fflfflfflfflfflffl{zfflfflfflfflfflffl}Kp
01 0101000|fflfflfflfflffl{zfflfflfflfflffl}Ki
The boundaries are 0 , Kp , 1 and 0 , Ki , 5.
The Enhanced Genetic Algorithm searches for the optimal solution by
maximizing or minimizing the function and, therefore, an evaluation
function which provides a measure of the quality of the problem solution.
As the objective functions in the optimization, integral square error (ISE),
integral time absolute error (ITAE), mean square error (MSE), settling time,
and peak overshoot are widely used. In the pH process, frequent change of
the magnitude of errors with respect to time make the control problem very
complicated. The MSE is chosen as the objective function to achieve the
minimal control errors. The MSE squares the error to remove negative error
components. MSE discriminates between over-damped and under damped
systems.
fMSE ¼1
n
Xnt¼1
ðeðtÞÞ2 ð10Þ
The fitness function is:
f ¼ fMSE þ fosþ fst: ð11Þ
During the GA run, GA searches for a solution with a maximum fitness-
function value. Hence, the minimization objective function, which is given by
Eq. (9) is transformed as:
Fitness ¼K
1þ fð12Þ
K is a constant. In the denominator, a value of 1 is added to f in order to avoid
division by zero.
Proportional Integral Controller Tuning 627

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
RESULTS AND DISCUSSION
This section presents the details of the design of PI controller for the pH
process. First, the proposed GA-based algorithm was applied to design the
PI controller for a simulated pH process and then the same algorithm was
applied to a real-time system. The GA code was written in MATLAB and
executed on a PC with a Pentium IV processor. The design details and the per-
formance of the controller are given below.
Simulation Results
The pH process was simulated based on Eqs. (1) and (2), using MATLAB
simulink. The model parameters for the experimental system are given in
Table 1. The pH model, simulated using MATLAB Simulink, is shown in
Fig. 6. A step signal is used as the input to the system. Uniformly distributed
noise is added to the step input through a uniform random generator. This is
Table 1. Model parameters for the pH process
Symbols Description Value
V Volume of the continuous stirred
tank reactor
7.4l L
Fa Flow rate of the influent stream 0.24 L min2l
Fb Flow rate of the titrating stream 0–0–0.8 L min21
Ca Concentration of the influent stream 0.2 g mol L21
Cb Concentration of the titrating stream 0.1 g mol L21
Figure 6. Simulation of pH model.
K. Valarmathi, D. Devaraj, and T. K. Radhakrishnan628

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
done to cause no-linear distortion due to the dead zone non-linearity in the pH
process. A PI controller was used to control the pH process.
The GA-based algorithm is applied to find the optimal parameters of the
controller. The objective function in this pH process is minimization of error,
peak overshoot, rise time, and settling time. The optimization variables are
represented as binary numbers in the GA population. The initial population
is randomly generated between the variables’ lower and upper limits. Tourna-
ment selection is applied to select the members of the new population.
Advanced genetic operators are applied after the application of the
crossover and mutation operators on the selected individuals. The perform-
ance of GA for various values of crossover and mutation probabilities in the
ranges 0.6–1.0 and 0.001–0.1, respectively, was evaluated.
The best results of the proposed GA are obtained with the following
control parameters:
Number of generations ¼ 30
Population size ¼ 10
Crossover probability ¼ 0.8
Mutation probability ¼ 0.08
The EGA took 12 s to complete the 30 generations. After 30 generations,
it was found that all the individuals had reached almost the same fitness value.
This shows that the proposed GA has reached the optimal solution. Figure 7
shows the convergence of proposed GA algorithm. It is observed the
Figure 7. Convergence of proposed GA.
Proportional Integral Controller Tuning 629

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
variation of the fitness during the GA run for the best case and shows the gen-
eration of optimal variables. It can be seen that the fitness value increases
rapidly in the first 2 generations of the GA. During this stage, the GA concen-
trates mainly on finding feasible solutions to the problem. Then, the value
increases slowly, and settles down near the optimum value with most of the
Figure 8. Tracking performance of proposed GA, ZN, and IMC tuned PI.
Table 2. Comparison of different tuning methods
Tuning MSE OS Ts Tp Tr SP
ZN 0.1996 3.97 25 1 1 5
IMC 0.1510 4.16 20 1 1
GA 0.0141 3.95 5 1 1
EGA 0.0136 3.95 5 1 1
ZN 2.987 4.13 289 101 1 7
IMC 0.4985 14 68 14 1
GA 0.0762 3.33 372 184 1
EGA 0.076 1.78 14 25 1
ZN 14.47 3.44 513 195 33 9
IMC 0.2914 4.5 535 293 33
GA 0.207 2.70 453 189 17
EGA 0.1468 2.31 527 173 18
ZN 48.62 15.6 210 92 86 11
IMC 3.2960 10.256 70 25 20
GA 0.899 5.42 311 24 22
EGA 0.4186 5.20 5.51 22 19
K. Valarmathi, D. Devaraj, and T. K. Radhakrishnan630

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
individuals in the population reaching that point. Next, for comparison, ZN
tuning, IMC, simple GA, and the proposed GA tune the PI controller for the
pH process with 20% changes in acid flow rate. The performance indices
obtained from various tuning methods are shown in Table 2. Figure 8
shows the tracking performance of the proposed GA, ZN, and IMC tuned PI
controller for various set point levels. The proposed GA has minimum
settling time and minimum peak overshoot, compared to the other tuning
methods. The ZN method shows satisfactory response, but it could not
settle at the set point 9. IMC tuning of PI shows more peak overshoot at the
set point 7 and set point 9.
Figure 9. Experimental setup of pH process.
Proportional Integral Controller Tuning 631

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
Experimental Results
This section presents the details of the experimental work carried out in lab-
oratory grade pH process. Figure 9 shows the arrangement of the experimental
setup used in this work. In this setup, acetic acid is fed to the reactor at a
constant flow rate and sodium hydroxide is added to the reactor through the
pump which controlled by the PI controller. Perfect mixing is ensured by
using a stirrer to maintain uniform concentration throughout the reactor.
The tank is provided with two nozzles to feed the inlet streams; the
capacity of the tank is 7.4 liters. The contents of the tank are agitated by a
four-paddle stirrer and the pH value is measured by a pH electrode.
The pH process is interfaced with the Pentium IV PC using a dSPACE
1104 real time data acquisition card. The card supports 8 ADC and 8 DAC
channels and the conversion speed of the card is 2 ms for ADC and 10 ms
for DAC. The MATLAB program is converted to C-code through the
dSPACE card and the control desk software is provided with the data acqui-
sition card. The real time coding is executed with a sampling rate of 10
seconds.
The results obtained using the proposed GA and IMC tuned PI controller
with set point level 11 is shown in Fig. 10. From the figure, it is found that the
IMC tuned PI controller has a greater rise time. The response of the process to
load disturbance, which is introduced in the set point 5, is shown in Fig. 11.
Figures 12 and 13 represent the behavior of the feed flow rate of base and
pH response of the pH process using different tuning methods at set point 7.
It shows that the control performance using IMC tuning has more peak
overshoot, i.e., similar to the results obtained using simulation. Overall the
performance of the controller is found to be good when it is tuned with the
proposed GA.
Figure 10. Comparison of EGA, GA, and IMC tuned PI (set point 11).
K. Valarmathi, D. Devaraj, and T. K. Radhakrishnan632

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
Figure 11. Results of EGA with load disturbances (set point 5).
Figure 12. Feed flow rate of pH process using different tuning methods.
Figure 13. pH value of pH process using different tuning methods.
Proportional Integral Controller Tuning 633

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
CONCLUSION
A tuning technique based on the enhanced genetic algorithm is developed and
applied to the real-time control of a pH process. The pH control is quite
difficult, due to non-linearity of the neutralization process. This process
requires good control to overcome the load disturbances. The optimal par-
ameters of the PI controller at each pH region are computed by using the
enhanced genetic algorithm. From the simulations, this enhanced GA tuned
PI controller has minimum settling time and minimum MSE, compared to
the ZN and IMC methods. Experimental results show that the proposed con-
troller is able to tune quickly and reduce the tracking error to zero, in a manner
similar to the simulation results.
REFERENCES
1. Astrom, K.J.; Hagglund, H. Automatic Tuning of PID Controllers; ISA: Res.Triangle Pk: NC, USA, 1988.
2. Lin, F.; Brandt, R.D. Self-tuning of PID controllers by adaptive interaction, Proc.Amer. Cont. Conf., Chicago, IL, 2000, 3676–3681.
3. Rivera, D.E.; Morari, M. Internal model control-PID controller design. Int. Eng.Chem. Proc. Des. Dev. 1986, 25, 252–265.
4. Ziegler, G.; Nichols, N.B. Optimum settings for automatic controllers. Trans.ASME 1942, 64, 759–768.
5. Wright, R.; Kravaris, C. Nonlinear control of pH processes using the strong acidequivalent. Ind. Eng. Chem. Res. 1991, 30 (7), 1561–1572.
6. Henson, M.; Seborg, D. Adaptive nonlinear control of a pH neutralization process.IEEE Trans. Cont. Syst. Tech. 1994, 2 (3), 169–182.
7. De Leon-Morales’, J.; Alvarez-Leal, J.G. Observer-based controllers for a flexiblejoint robot manipulator. Proc. IEEE Conf. Decis. Cont., 1998, 2 (16), 1500–1501.
8. Assawinchaichote, W.; Nguang, S.K. Fuzzy observer based controller design forsingularly perturbed nonlinear system: an LMI approach, Proc. IEEE Conf.Decis. Cont., 2002, 2, 2165–2170.
9. Varsek, A.; Verbanic, T. Genetic Algorithms in controller design and tuning. IEEETrans. Cont. Syst. Man Cybernet. 1993, 23 (5), 1330–1339.
10. Oliveira, P.; Sequeira, J. Engineering Systems with Intelligence Concepts, Tools,and Application; Kluwer Academic Publishers: Netherlands, 1991.
11. Porter, B.; Jones, A.H. Genetic tuning of digital PID controllers. Electron. Lett.1992, 28 (9), 843–844.
12. Wang, P.; Kwok, D.P. Optimal design of PID controllers based on geneticalgorithm. Cont. Eng. Pract. 1992, 2 (4), 641–648.
13. Koo, Y.; Kwon, T.-I. Control of pH Processes based on the Genetic Algorithm.Korean J. Chem. Eng. 2004, 21 (1), 6–13.
14. Dionisio Pereira, S.; Pinto, O.P. Genetic algorithm based system identification andPID tuning for optimum adaptive control. Proc. IEEE/ASME, Intl. Conf. Adv.Intell. Mechatron, Monterey, CA, 2005; 24–28.
15. McAvoy, T.J.; Hsu, E. Dynamics of pH in Controlled Stirred Tank Reactor. Ind.Eng. Chem. Proc. Des. Dev. 1972, 1, 68.
K. Valarmathi, D. Devaraj, and T. K. Radhakrishnan634

Dow
nloa
ded
By:
[Rad
hakr
ishn
an, T
. K.]
At:
10:0
5 29
Oct
ober
200
7
16. Skogestad, S. Simple analytical rules for model reduction and PID controllertuning. J. Proc. Cont. 2003, 13, 291–309.
17. Goldberg, D.E. Genetic Algorithms in Search, Optimization & Machine Learning;Addison-Wesley: 1989.
18. Bakirtzis, A.G.; Zoumas, C.E. Optimal power flow by Enhanced GeneticAlgorithm. IEEE Trans. Power Syst. 2002, 17 (2), 229–236.
Received May 17, 2007
Accepted July 30, 2007
Manuscript 1650
Proportional Integral Controller Tuning 635




















