Research Modelling of Ultrasonic Nondestructive Testing in ...
A Thesis
entitled
Magnetic Sensor for Nondestructive Evaluation of Deteriorated Prestressing Strand
by
James D. Wade
Submitted to the Graduate Faculty as partial fulfillment of the requirements for the Master of Science Degree in Civil Engineering
Dr. Douglas Nims, Committee Chair
Dr. Vijay Devabhaktuni, Committee Member Dr. Brian Randolph, Committee Member Dr. Patricia R. Komuniecki, Dean College of Graduate Studies
The University of Toledo May 2010

Copyright 2010, James David Wade
This document is copyrighted material. Under copyright law, no parts of this document may be reproduced without the expressed permission of the author.
iii
An abstract of
Magnetic Sensor for Nondestructive Evaluation of Deteriorated Prestressing Strand
by
James D. Wade
Submitted to the Graduate Faculty in partial fulfillment of the requirements for the Master of Science Degree in Civil Engineering
The University of Toledo
May 2010
The objective of this thesis was to develop a non-destructive in-situ magnetic
technique to investigate the remaining cross-sectional area of prestressing strands.
Corrosion is the predominate failure-mechanism in box-beam bridges. The current
method, visual inspection, is not sufficient as the strands may not be exposed to the
investigator. An inaccurate estimate of the remaining area of strands can lead to an
overestimated strength of the bridge. A new technique involving an electromagnet and
magnetic theories was researched for this thesis.
The experiments conducted have shown that it is possible to distinguish between
different cross-sectional areas using an electromagnet and Hall sensors. Experiments
with an air-gap were first used to simulate concrete cover and provide viability of the
technique. These experiments showed that as the cross-sectional area increased so did
the induced magnetic field.
To further the research, concrete blocks were used in place of the air-gap to better
simulate field conditions. Again, these experiments showed an increase in the induced
magnetic field as the cross-sectional area was increased. Using the data from the air-gap
iv
and concrete block experiments, an approach to determine the cross-sectional area of a
corroded strand under concrete cover was investigated.
v
Acknowlegements
I would like to thank Dr. Douglas Nims for his guidance and engineering
expertise during the production of this research and paper, Dr. Vijay Devabhaktuni and
Bertrand Fernandes for their contributions in establishing the electrical aspect of this
research, and Dr. Brian Randolph for being on the thesis committee and providing
valuable feedback on the research problem and solution. In addition, I would like to
thank the US Department of Transportation for funding this research through the
University of Toledo-University Transportation Research Center and Dr Gottfried
Sawade from the University of Stuttgart, Germany for sharing information about the
electromagnet used in his research. In addition, the design engineers from Ohio
Magnetics, Sophie Zaslavsky and Paul Sheridan were extremely helpful and patient
during the design and procurement process of our final electromagnet. I would also like
to thank MMIStrandCo for their donation of prestressing strand and the Ohio Department
of Transportation for allowing me to hold my presentation at their facility in Bowling
Green, Ohio. Finally, I would like to thank my family for their support and
encouragement throughout the entire process.
vii
Contents
Abstract.......................................................................................................... ............ iii
Acknowledgements.................................................................................................... v
Contents...................................................................................................................... vi
List of Tables.............................................................................................................. ix
List of Figures............................................................................................................. x
1 Introduction.................................................................................................. 1
1.1 Overview............................................................................................ 1
1.2 Problem Statement............................................................................. 2
1.3 Research Objectives........................................................................... 4
1.4 Research Theory and Approach......................................................... 5
2 Literature Review........................................................................................ 9
3 Preliminary Experiments............................................................................ 13
3.1 Background........................................................................................ 13
3.2 Procedure........................................................................................... 14
3.2.1 Trial 1..................................................................................... 15
3.2.2 Trial 2..................................................................................... 16
3.2.3 Trial 3..................................................................................... 16
3.2.4 Trial 4..................................................................................... 18
3.2.5 Trial 5..................................................................................... 19
3.2.6 Trial 6..................................................................................... 20
3.2.7 Trial 7..................................................................................... 21
vii
4 Ohio Magnetics............................................................................................. 24
5 Secondary Experiments............................................................................... 34
5.1 Solid Steel Round Experiments......................................................... 34
5.2 Prestressing Strand Experiments........................................................ 38
5.3 Estimating Cross-Sectional Area Loss............................................... 40
6 Conclusion.................................................................................................... 48
6.1 Results................................................................................................ 48
6.2 Future Research................................................................................. 50
References................................................................................................................. 51
Appendices
Appendix A............................................................................................................... 52
viii
List of Tables
3-1 Trial 1 experimental data.............................................................................. 15
3-2 Trial 2 experimental data.............................................................................. 16
3-3 Trial 3 experimental data.............................................................................. 17
3-4 Trial 4 experimental data.............................................................................. 18
3-5 Trial 5 experimental data.............................................................................. 19
3-6 Trial 6 experimental data.............................................................................. 20
3-7 Trial 7 experimental data.............................................................................. 22
3-8 Brief summary of all trial experiments......................................................... 22
4-1 0.125 inch thick specimen results................................................................. 27
4-2 0.1875 inch thick specimen results............................................................... 28
4-3 0.375 inch thick specimen results................................................................. 28
5-1 Gauss reading for 1018 steel rounds tested at various air-gaps.................... 35
5-2 Gauss reading for 1018 steel rounds tested at various concrete gaps........... 37
5-3 Gauss reading for prestressing strand tested at various air-gaps.................. 39
5-4 Gauss reading for prestressing strands tested at various concrete gaps........ 39
5-5 Results from corroded strand experiments................................................... 43
5-6 Estimates of remaining cross-sectional area of samples 1 and 2 at
115
16" concrete gap......................................................................................... 45
ix
List of Figures
1-1 I-70 collapse.................................................................................................. 2
1-2 I-70 collapse.................................................................................................. 2
1-3 Corroded tendons.......................................................................................... 4
1-4 Hall Effect principle...................................................................................... 6
1-5 Basic block diagram of Hall Effect sensor................................................... 7
3-1 Test equipment set-up................................................................................... 13
3-2 Specimen position for trial 1......................................................................... 14
3-3 Trial 1 area vs. field strength with linear fit equation................................... 15
3-4 Trial 2 area vs. field strength with linear fit equation................................... 16
3-5 Trial 3 area vs. field strength with linear fit equation................................... 17
3-6 Trial 4 area vs. field strength........................................................................ 19
3-7 Trial 5 area vs. field strength........................................................................ 19
3-8 Trial 6 area vs. field strength........................................................................ 20
3-9 Trial 7 set-up................................................................................................. 21
3-10 Trial 7 set-up................................................................................................. 21
4-1 Ohio Magnetics test set-up............................................................................ 25
4-2 Air-gap vs. flux density................................................................................. 29
4-3 Area vs. flux density..................................................................................... 29
x
4-4 Flux lines through longitudinal axis of specimen......................................... 31
4-5 Magnetic domain walls................................................................................. 31
4-6 Domain growth curve................................................................................... 32
4-7 Ohio Magnetics electromagnet..................................................................... 33
5-1 Test set-up for 1018 steel rounds with air-gap.............................................. 35
5-2 Gauss reading vs. cross-sectional area for 1018 steel rounds
with air gaps.................................................................................................. 36
5-3 Test set-up for 1018 steel rounds with concrete gap..................................... 37
5-4 Gauss reading vs. cross-sectional area for 1018 steel rounds
with concrete gap.......................................................................................... 38
5-5 Typical prestressing strand section............................................................... 38
5-6 Gauss reading vs. cross-sectional area for prestressing strands
with air-gap................................................................................................... 39
5-7 Gauss reading vs. cross-sectional area for prestressing strands
with concrete gap.......................................................................................... 40
5-8 Test set-up for corroded strand..................................................................... 41
5-9 Separation of wires in corroded strand......................................................... 42
5-10 Example calculation of estimating remaining cross-sectional area.............. 44
5-11 Magnetization curve for iron........................................................................ 47
A-1 Drawing of electromagnet design by Ohio Magnetics................................. 54
1
Chapter 1 Introduction An electromagnet and Hall sensors were used to investigate the remaining cross-sectional
area of prestressing strand due to corrosion.
1.1 Overview
A new non-destructive technique of inspection is needed to evaluate the condition
of prestressing strand in prestressed bridges. The technique studied for this thesis uses an
electromagnet and magnetic theories as an investigation tool. A piece of steel can be
magnetized using an electromagnet and the induced magnetic field can be measured with
a Gauss Meter or other type of Hall sensor equipment. It was hypothesized that a
correlation between the induced magnetic field and cross-sectional area could be
observed. Previous work done state-side and abroad affirmed this hypothesis. There has
been success in Europe in determining fracture locations in prestressed strands using
electromagnetic applications. Researchers in Chicago have been able to detect cross-
sectional area differences of steel rod specimens using electromagnetic applications
(Indacochea). The preliminary experiments described in Chapter 3 of this thesis were the
2
first attempt in proving the magnetic system being investigated in this thesis. The
preliminary experiments were successful in determining cross-sectional area differences.
However, when an air-gap was introduced to simulate concrete cover, the results became
less consistent and a distinction between cross-sectional areas could not be determined
with the initial magnetic system. Due to these observations, future research on this thesis
would include grounding the research with a theoretical basis, as much of the work done
thus far had been a trial and error process. Also, with help from an electromagnet
manufacturer, the design of a stronger magnet needed to magnetize specimens through
the air-gap would be investigated. Finally, once air-gap experiments were successful,
specimens with a concrete block gap were tested.
1.2 Problem Statement
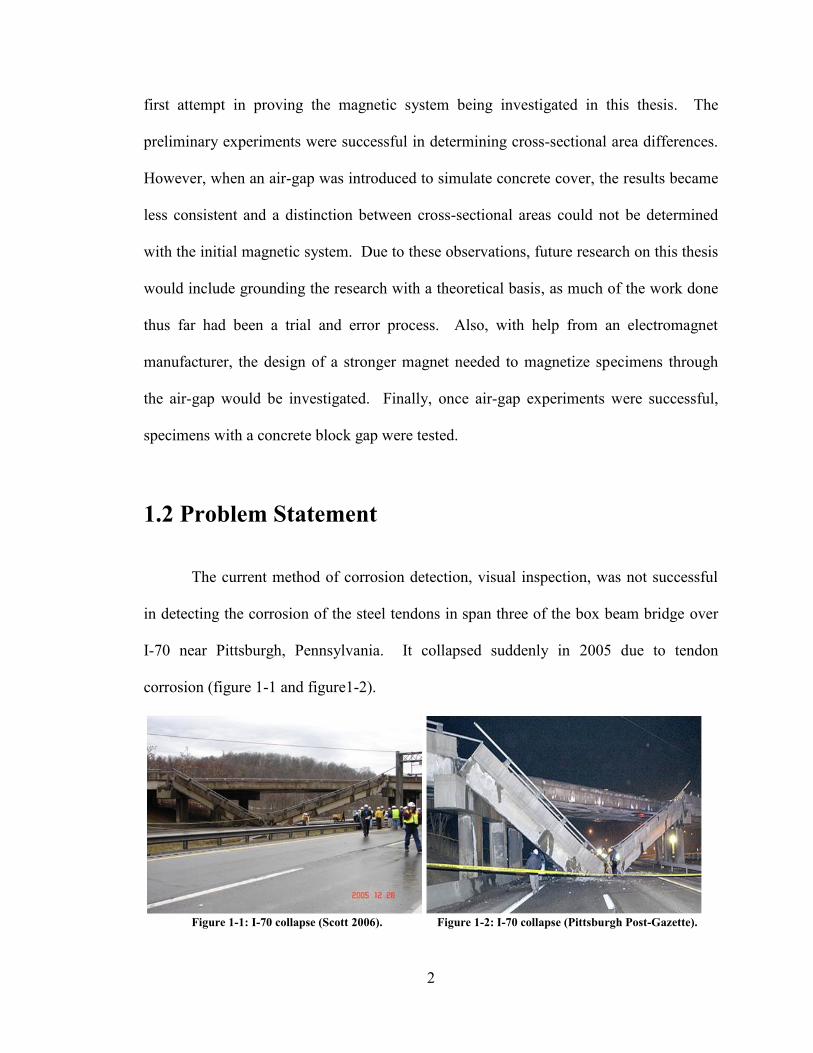
The current method of corrosion detection, visual inspection, was not successful
in detecting the corrosion of the steel tendons in span three of the box beam bridge over
I-70 near Pittsburgh, Pennsylvania. It collapsed suddenly in 2005 due to tendon
corrosion (figure 1-1 and figure1-2).
Figure 1-1: I-70 collapse (Scott 2006). Figure 1-2: I-70 collapse (Pittsburgh Post-Gazette).
3
This prestressed box beam bridge was built in 1960 and was considered structurally
deficient at the time of collapse. Currently, ten percent of the bridges in Ohio are of the
type that collapsed in Pennsylvania (Nims, 2008). Visual inspection is mostly ineffective
due to the fact that the state of the strands is unknown unless the concrete has spalled and
exposed the strand. This leads to incorrect estimates of the effective cross-sectional area
of strands and most inevitably to an overestimated flexural strength of the bridge. The
sudden collapse of any bridge can be costly in dollars, public trust, and safety.
In 2001 the Federal Highway Administration (FHWA) estimated the annual direct
cost of corrosion for highway bridges at $8.3 billion. Two billion dollars is used for the
maintenance and cost of capital for concrete bridge decks, another $2 billion for
maintenance and cost of capital for concrete substructures, $0.5 billion for maintenance
painting, and $3.8 billion to replace structurally deficient bridges over the next 10 years.
Highway bridges encompass 37 percent of the $22.6 billion direct annual costs due to
corrosion involving infrastructure (FHWA, 2002). To lower the annual cost of repairing
prestressed bridges and ultimately make bridges safer, a new technique of inspection is
needed.
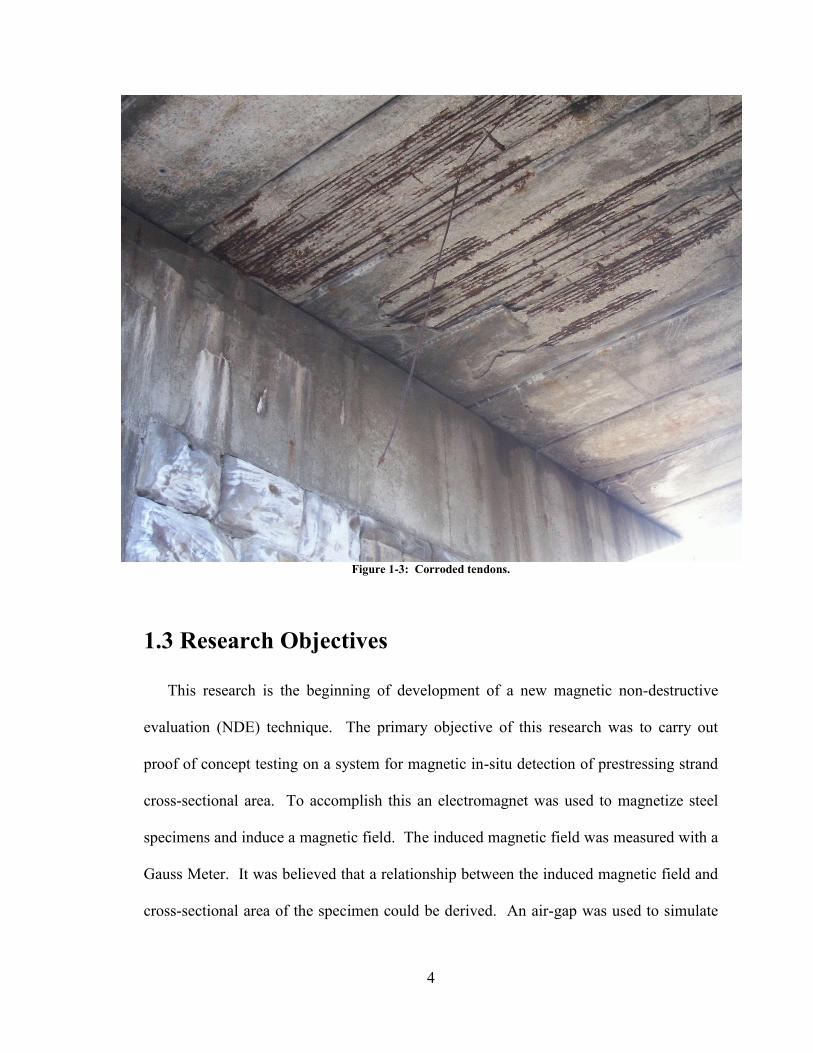
A more accurate, convenient nondestructive inspection technique is needed to
inspect bridges. This new technique should be able to make the distinction between new
prestressed strands and corroded strands (figure 1-3). A new, successful technique will
save lives as well as reduce the lifecycle costs of bridges.
4
Figure 1-3: Corroded tendons.
1.3 Research Objectives
This research is the beginning of development of a new magnetic non-destructive
evaluation (NDE) technique. The primary objective of this research was to carry out
proof of concept testing on a system for magnetic in-situ detection of prestressing strand
cross-sectional area. To accomplish this an electromagnet was used to magnetize steel
specimens and induce a magnetic field. The induced magnetic field was measured with a
Gauss Meter. It was believed that a relationship between the induced magnetic field and
cross-sectional area of the specimen could be derived. An air-gap was used to simulate

5
concrete cover and develop the relationship further. Finally, specimens over concrete
blocks were tested.
1.4 Research Theory and Approach
The magnetic properties of steel are strongly affected by corrosion. Rusting and
corrosion introduce atoms of other elements (typically oxygen) into the material, thus
changing the chemical forms of the material. Due to this change, the steel may become
non-ferromagnetic or less ferromagnetic, thereby, changing the magnetic properties. By
examining the magnetic behavior of steel before and after corrosion, a correlation
between the magnetic properties and loss of steel due to corrosion was made.
In the present approach, the tendons were magnetized by using an electromagnet.
The magnetized tendons had a magnetic field proportional to that of the electromagnet.
The magnetic field strength of the tendons was measured with a Hall Effect sensor, which
provided a voltage reading proportional to the applied magnetic field. Since the magnetic
field strength of the tendon varied with the characteristics of the tendon, such as cross-
sectional area. The present condition of the tendon could be determined through
examination of the magnetic field strength. Examination of the magnetic field strength
required comparison of the newly obtained magnetic field strength to base references
determined in laboratory experiments.
To measure the magnetic field, a Hall Effect sensor was used. A Hall Effect
sensor is a transducer that varies its output voltage in response to changes in the magnetic
field. When a current carrying conductor is placed in the magnetic field, a voltage is
generated perpendicular to both the current and the field. This effect is known as the Hall
6
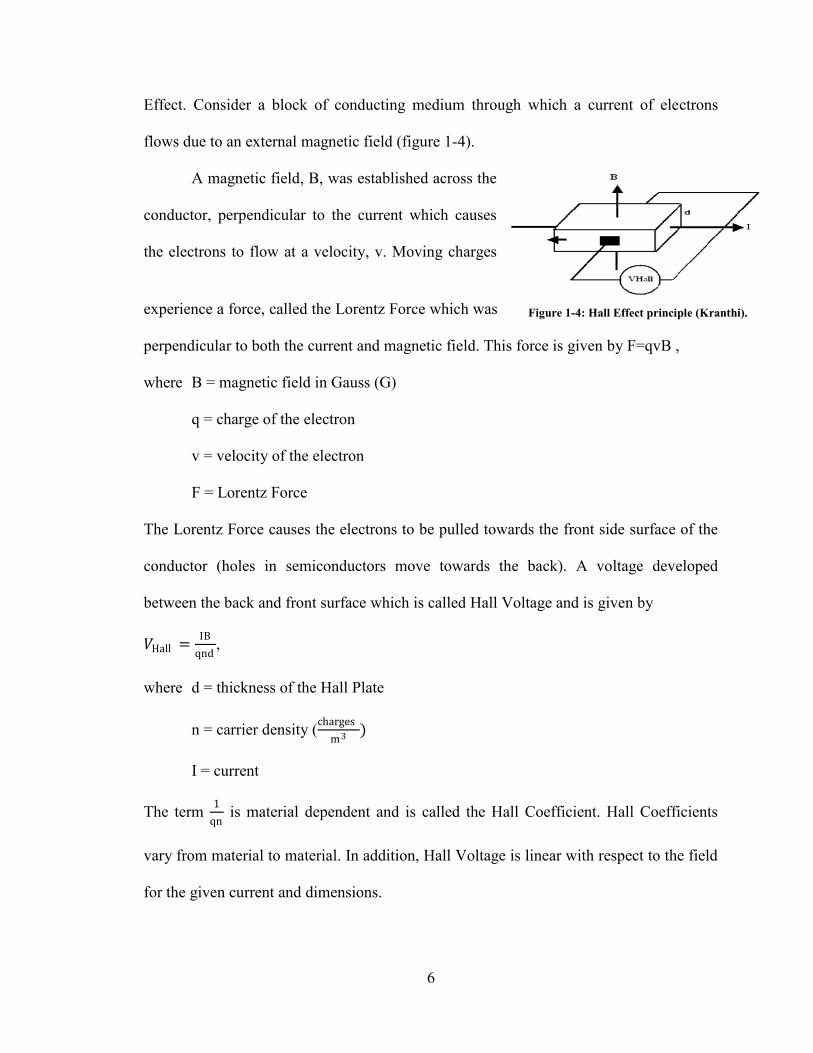
Effect. Consider a block of conducting medium through which a current of electrons
flows due to an external magnetic field (figure 1-4).
A magnetic field, B, was established across the
conductor, perpendicular to the current which causes
the electrons to flow at a velocity, v. Moving charges
experience a force, called the Lorentz Force which was
perpendicular to both the current and magnetic field. This force is given by F=qvB ,
where B = magnetic field in Gauss (G)
q = charge of the electron
v = velocity of the electron
F = Lorentz Force
The Lorentz Force causes the electrons to be pulled towards the front side surface of the
conductor (holes in semiconductors move towards the back). A voltage developed
between the back and front surface which is called Hall Voltage and is given by
𝑉Hall =IB
qnd,
where d = thickness of the Hall Plate
n = carrier density (charges
m3)
I = current
The term 1
qn is material dependent and is called the Hall Coefficient. Hall Coefficients
vary from material to material. In addition, Hall Voltage is linear with respect to the field
for the given current and dimensions.
Figure 1-4: Hall Effect principle (Kranthi).
7
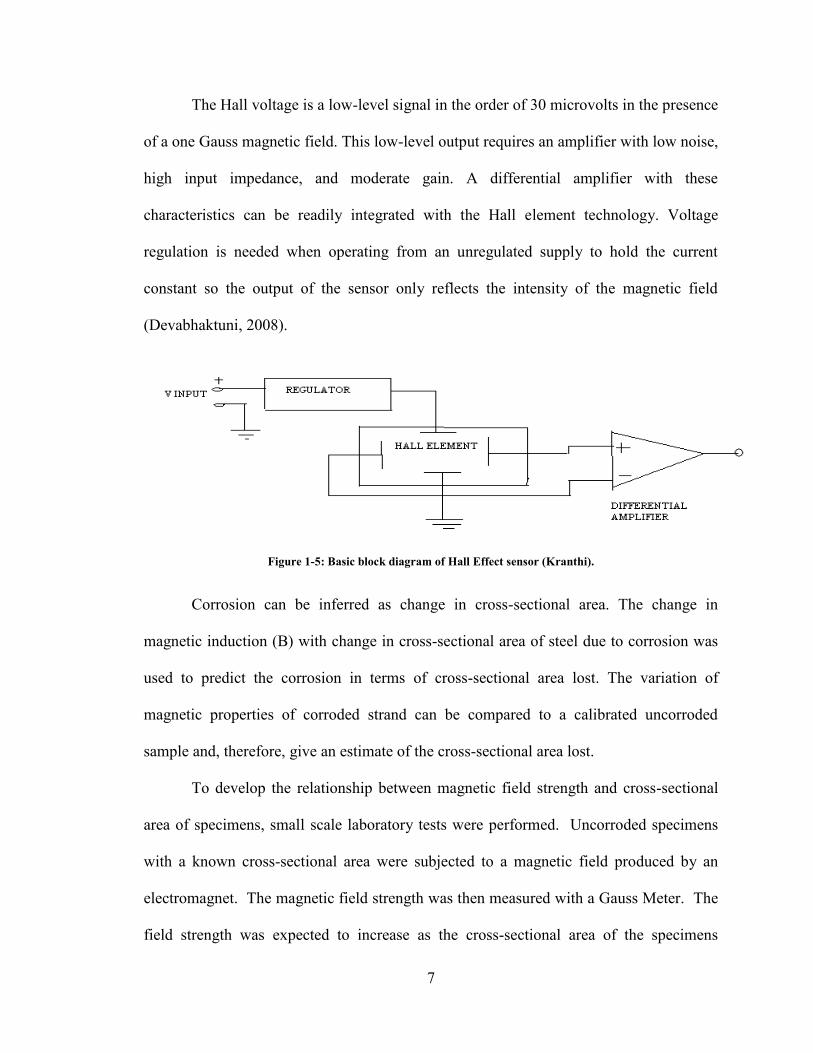
The Hall voltage is a low-level signal in the order of 30 microvolts in the presence
of a one Gauss magnetic field. This low-level output requires an amplifier with low noise,
high input impedance, and moderate gain. A differential amplifier with these
characteristics can be readily integrated with the Hall element technology. Voltage
regulation is needed when operating from an unregulated supply to hold the current
constant so the output of the sensor only reflects the intensity of the magnetic field
(Devabhaktuni, 2008).
Figure 1-5: Basic block diagram of Hall Effect sensor (Kranthi).
Corrosion can be inferred as change in cross-sectional area. The change in
magnetic induction (B) with change in cross-sectional area of steel due to corrosion was
used to predict the corrosion in terms of cross-sectional area lost. The variation of
magnetic properties of corroded strand can be compared to a calibrated uncorroded
sample and, therefore, give an estimate of the cross-sectional area lost.
To develop the relationship between magnetic field strength and cross-sectional
area of specimens, small scale laboratory tests were performed. Uncorroded specimens
with a known cross-sectional area were subjected to a magnetic field produced by an
electromagnet. The magnetic field strength was then measured with a Gauss Meter. The
field strength was expected to increase as the cross-sectional area of the specimens

8
increased. Using this data, a relationship between field strength and cross-sectional area
was developed yielding to an approach that can be used to estimate the remaining sound
cross-sectional area of a corroded strand. Experiments (described in Chapter 3 and 4)
were done in air with an air gap between the specimen and electromagnet. After the
aforementioned experiments were performed successfully, the specimens were placed
over concrete blocks to further simulate field conditions. Finally, corroded specimens
were introduced and subjected to the same testing procedures.
9
Chapter 2
Literature Review
A literature review of existing NDE techniques yielded four popular reoccurring
techniques: ultrasonic defect detection, acoustic emission, ground penetrating radar, and
magnetic flux leakage. The journal article “Evaluation of Corrosion of Prestressing Steel
in Concrete Using Non-destructive Techniques” by Ali and Maddocks published in 2003
gives descriptions of these techniques and several others. A brief description of the four
aforementioned techniques follows:
A. Ultrasonic Defect Detection
A short pulse of ultrasound is generated by means of an electric charge applied to
a piezoelectric crystal which vibrates for a short period at a frequency related to
the crystal thickness. The vibrations rebound to the probe and through ultrasound
equipment and software are converted into an image on a screen. The main
disadvantage of this technique is that it is a passive detection technique rather
than a monitoring technique (Ali, 2003). In addition, only the surface exposed to
the charge is detected rather than the entire volume.
10
B. Acoustic Emission
Acoustic emissions caused by stresses exerted on a material are collected by
transducers that convert mechanical movement into an electrical voltage signal
which can be interpreted as a new crack or other flaw in the material. The main
disadvantage of this technique is that it is a passive detection system that will not
generate data unless an event occurs (Ali, 2003). Corrosion is not a drastic
enough event to register with this type of investigation.
C. Ground Penetrating Radar
An electrically charged pulse signal is transmitted into the material being
examined. Different reflections received represent changing dielectric properties.
The main disadvantage of this technique is that the signal reflects from the surface
nearest the source, thus, information about the cross-sectional area cannot be
obtained (Ali, 2003).
D. Magnetic Flux Leakage Method
A magnetic field is produced by magnetizing the steel tendons. Disturbances or
discontinuities in the magnetic field represent ruptures or reduction of cross-
sectional area. Two significant disadvantages of this technique are that it detects
fractures not loss of area due to corrosion, and it lacks consistency in the
measurement of magnetic fields due to the properties of concrete (Ali, 2003).
The magnetic flux leakage method was studied further by Hillemeier and Scheel.
Their research on this method was published in the journal article “Magnetic Detection of
Prestressing Steel Fractures in Prestressed Concrete” in 1998. Hillemeier and Scheel
used the remnant magnetism method to detect fractures in prestressed concrete structures.
11
They assumed that a magnetized steel wire was comparable to the magnetic field of a bar
magnet. From this, they derived that a signal leakage would be present in the field where
the fracture was present. The tendons were magnetized with a yoke shaped
electromagnet with up to 300 millimeters (12 inches) of concrete cover. The tendons
were magnetized to a saturated state as to eliminate all effects of previous magnetism, i.e.
lifting magnets, electric welding, etc. It was also, discovered that the different properties
of the mild reinforcement and the prestressing steel caused different degrees of
magnetization. As the magnetization increased, prestressing steel was found to increase
towards remanence while the mild reinforcement decreased to lower values. This
allowed for the signals from the prestressing steel to be distinguished from the mild
reinforcement. To simulate fractures in the specimens, the steel wires were cut, flat
ground, and glued. Hall sensors were used to measure the magnetic flux density. Results
showed that fractures could be detected using this method (Hillemeier, 1998).
Rumiche, Indacochea, and Wang also investigated the use of electromagnets to
determine cross-sectional area loss of steel specimens. Their work was published in
“Assessment of the Effect of Microstructure on the Magnetic Behavior of Structural
Carbon Steels Using an Electromagnetic Sensor” in 2007. To simulate cross-sectional
area loss, the specimens were machined down at a two inch region in the middle of the
rod. The specimens were placed within a solenoid electromagnet and magnetized to
saturation. The induced magnetic field was measured by Hall sensors at various positions
along the specimen. They found a linear relationship between the normalized mass loss
and the magnetic saturation for all the samples (Indacochea, 2007).
12
These two aforementioned articles were the basis for much of the work
undertaken in this proposal. The two significant differences being that instead of looking
for fractures like Hillemeier and Scheel, cross-sectional area loss of the strands was the
main objective. The solenoid electromagnet used by Rumiche and his colleagues is a
good method to prove that cross-sectional area can be detected, but this type of magnet
would not be useful in the field as the strands would already be embedded in concrete. A
combination and further exploration of the work described in the above articles lead to a
useful NDE technique for the laboratory and with further research the field.
13
Chapter 3 Preliminary Experiments 3.1 Background
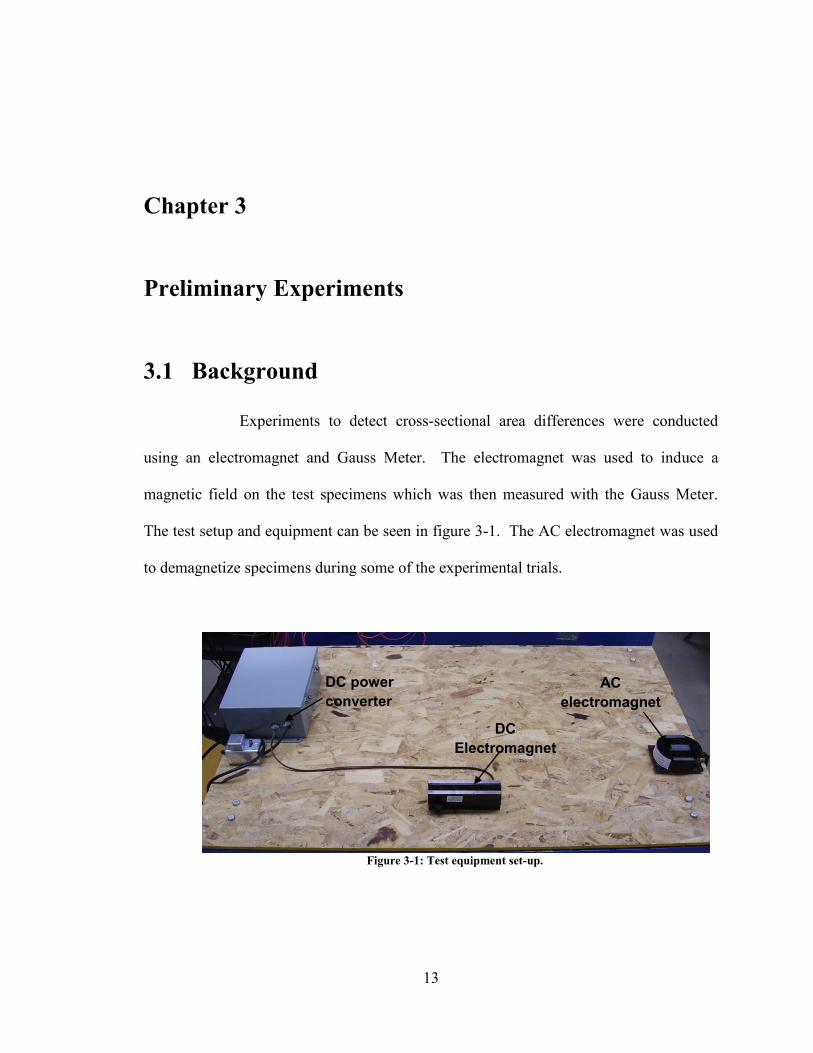
Experiments to detect cross-sectional area differences were conducted
using an electromagnet and Gauss Meter. The electromagnet was used to induce a
magnetic field on the test specimens which was then measured with the Gauss Meter.
The test setup and equipment can be seen in figure 3-1. The AC electromagnet was used
to demagnetize specimens during some of the experimental trials.
Figure 3-1: Test equipment set-up.
DC power converter
DC Electromagnet
AC electromagnet
14
3.2 Procedure
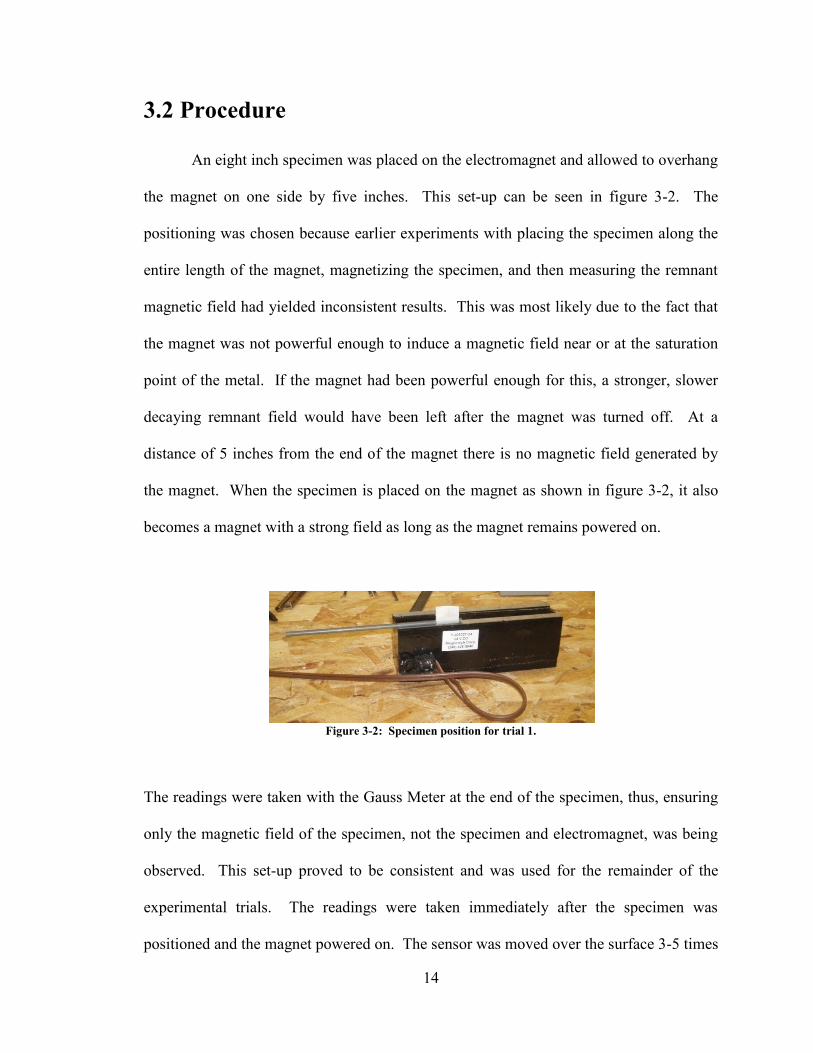
An eight inch specimen was placed on the electromagnet and allowed to overhang
the magnet on one side by five inches. This set-up can be seen in figure 3-2. The
positioning was chosen because earlier experiments with placing the specimen along the
entire length of the magnet, magnetizing the specimen, and then measuring the remnant
magnetic field had yielded inconsistent results. This was most likely due to the fact that
the magnet was not powerful enough to induce a magnetic field near or at the saturation
point of the metal. If the magnet had been powerful enough for this, a stronger, slower
decaying remnant field would have been left after the magnet was turned off. At a
distance of 5 inches from the end of the magnet there is no magnetic field generated by
the magnet. When the specimen is placed on the magnet as shown in figure 3-2, it also
becomes a magnet with a strong field as long as the magnet remains powered on.
Figure 3-2: Specimen position for trial 1.
The readings were taken with the Gauss Meter at the end of the specimen, thus, ensuring
only the magnetic field of the specimen, not the specimen and electromagnet, was being
observed. This set-up proved to be consistent and was used for the remainder of the
experimental trials. The readings were taken immediately after the specimen was
positioned and the magnet powered on. The sensor was moved over the surface 3-5 times
15
and the highest repeatable reading observed was recorded. The specimens underwent
magnetization three times for each trial, and the average field strength was calculated.
This procedure was used for experimental trials 1-6. A description of each trial and the
results of the trial are presented below.
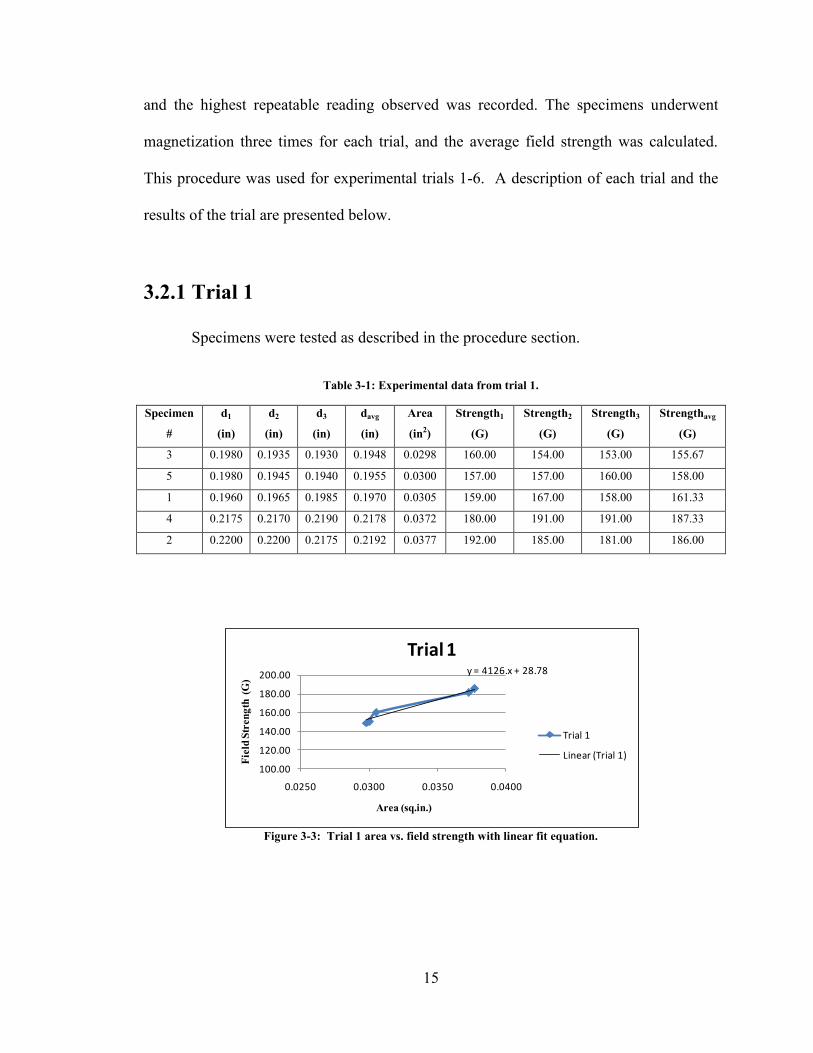
3.2.1 Trial 1
Specimens were tested as described in the procedure section.
Table 3-1: Experimental data from trial 1.
Specimen
#
d1
(in)
d2
(in)
d3
(in)
davg
(in)
Area
(in2)
Strength1
(G)
Strength2
(G)
Strength3
(G)
Strengthavg
(G)
3 0.1980 0.1935 0.1930 0.1948 0.0298 160.00 154.00 153.00 155.67
5 0.1980 0.1945 0.1940 0.1955 0.0300 157.00 157.00 160.00 158.00
1 0.1960 0.1965 0.1985 0.1970 0.0305 159.00 167.00 158.00 161.33
4 0.2175 0.2170 0.2190 0.2178 0.0372 180.00 191.00 191.00 187.33
2 0.2200 0.2200 0.2175 0.2192 0.0377 192.00 185.00 181.00 186.00
Figure 3-3: Trial 1 area vs. field strength with linear fit equation.
y = 4126.x + 28.78
100.00
120.00
140.00
160.00
180.00
200.00
0.0250 0.0300 0.0350 0.0400
Fiel
d St
reng
th (
G)
Area (sq.in.)
Trial 1
Trial 1
Linear (Trial 1)
16
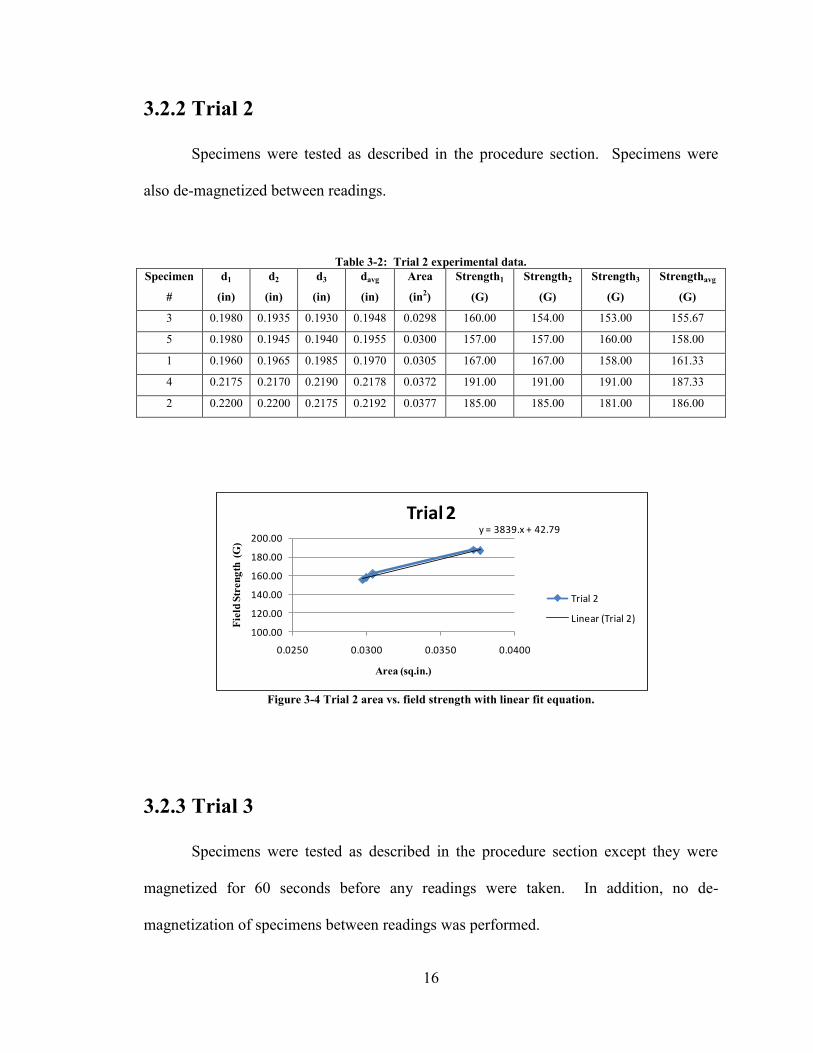
3.2.2 Trial 2
Specimens were tested as described in the procedure section. Specimens were
also de-magnetized between readings.
Table 3-2: Trial 2 experimental data. Specimen
#
d1
(in)
d2
(in)
d3
(in)
davg
(in)
Area
(in2)
Strength1
(G)
Strength2
(G)
Strength3
(G)
Strengthavg
(G)
3 0.1980 0.1935 0.1930 0.1948 0.0298 160.00 154.00 153.00 155.67
5 0.1980 0.1945 0.1940 0.1955 0.0300 157.00 157.00 160.00 158.00
1 0.1960 0.1965 0.1985 0.1970 0.0305 167.00 167.00 158.00 161.33
4 0.2175 0.2170 0.2190 0.2178 0.0372 191.00 191.00 191.00 187.33
2 0.2200 0.2200 0.2175 0.2192 0.0377 185.00 185.00 181.00 186.00
Figure 3-4 Trial 2 area vs. field strength with linear fit equation.
3.2.3 Trial 3
Specimens were tested as described in the procedure section except they were
magnetized for 60 seconds before any readings were taken. In addition, no de-
magnetization of specimens between readings was performed.
y = 3839.x + 42.79
100.00
120.00
140.00
160.00
180.00
200.00
0.0250 0.0300 0.0350 0.0400
Fiel
d St
reng
th (
G)
Area (sq.in.)
Trial 2
Trial 2
Linear (Trial 2)
17
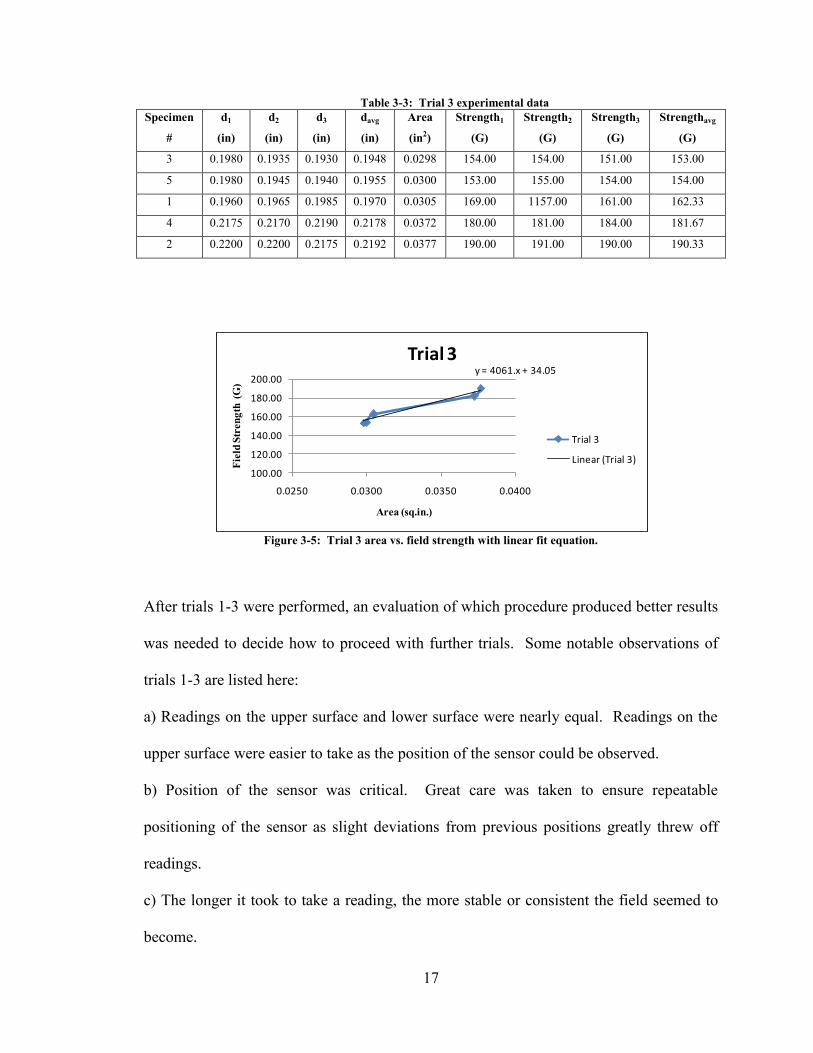
Table 3-3: Trial 3 experimental data Specimen
#
d1
(in)
d2
(in)
d3
(in)
davg
(in)
Area
(in2)
Strength1
(G)
Strength2
(G)
Strength3
(G)
Strengthavg
(G)
3 0.1980 0.1935 0.1930 0.1948 0.0298 154.00 154.00 151.00 153.00
5 0.1980 0.1945 0.1940 0.1955 0.0300 153.00 155.00 154.00 154.00
1 0.1960 0.1965 0.1985 0.1970 0.0305 169.00 1157.00 161.00 162.33
4 0.2175 0.2170 0.2190 0.2178 0.0372 180.00 181.00 184.00 181.67
2 0.2200 0.2200 0.2175 0.2192 0.0377 190.00 191.00 190.00 190.33
Figure 3-5: Trial 3 area vs. field strength with linear fit equation.
After trials 1-3 were performed, an evaluation of which procedure produced better results
was needed to decide how to proceed with further trials. Some notable observations of
trials 1-3 are listed here:
a) Readings on the upper surface and lower surface were nearly equal. Readings on the
upper surface were easier to take as the position of the sensor could be observed.
b) Position of the sensor was critical. Great care was taken to ensure repeatable
positioning of the sensor as slight deviations from previous positions greatly threw off
readings.
c) The longer it took to take a reading, the more stable or consistent the field seemed to
become.
y = 4061.x + 34.05
100.00
120.00
140.00
160.00
180.00
200.00
0.0250 0.0300 0.0350 0.0400
Fiel
d St
reng
th (
G)
Area (sq.in.)
Trial 3
Trial 3
Linear (Trial 3)
18
A timed magnetization may be a good way to get a stable consistent field and
reading. A review of the data collected from trials 1-3 showed that demagnetizing
between readings was not needed. In addition, magnetizing for 60 seconds before taking
a reading seemed to help stabilize the field and led to more consistent results. The
procedures for trial 3 were used for the remainder of the trials unless otherwise noted.
This procedure was chosen because the de-magnetizing seemed to have little or no effect
on the results. Also, the timed magnetization allowed for as many of the dipoles in the
material as possible to become aligned, thus, increasing the induced magnetic field.
The steel used for the specimens in trails 1-3 (specimens 1-5) was cold-rolled
1020 steel. The steel used for trials 4-5 (specimens 6-10) was cold-rolled, but of an
unknown grade. The purpose of trials 4-5 was to use the linear fit equation of trial 3 as a
mathematical means of calculating the field strength. The extrapolated strength was then
compared to the measured strength. Trial 6 used new specimens of the 1020 steel
(specimens 11-15) and these were also used to compare extrapolated magnetic field
strengths to measured field strengths. The data and comparisons for these trials are
shown below.
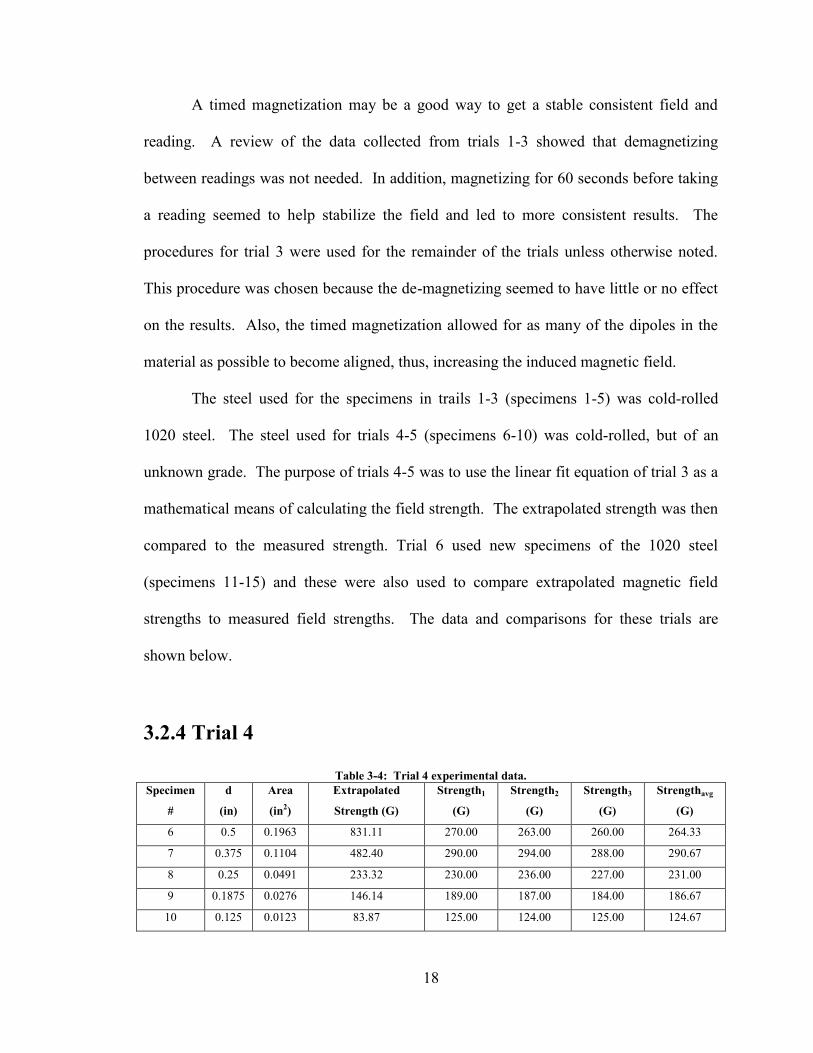
3.2.4 Trial 4
Table 3-4: Trial 4 experimental data. Specimen
#
d
(in)
Area
(in2)
Extrapolated
Strength (G)
Strength1
(G)
Strength2
(G)
Strength3
(G)
Strengthavg
(G)
6 0.5 0.1963 831.11 270.00 263.00 260.00 264.33
7 0.375 0.1104 482.40 290.00 294.00 288.00 290.67
8 0.25 0.0491 233.32 230.00 236.00 227.00 231.00
9 0.1875 0.0276 146.14 189.00 187.00 184.00 186.67
10 0.125 0.0123 83.87 125.00 124.00 125.00 124.67
19
Figure 3-6: Trial 4 area vs. field strength.
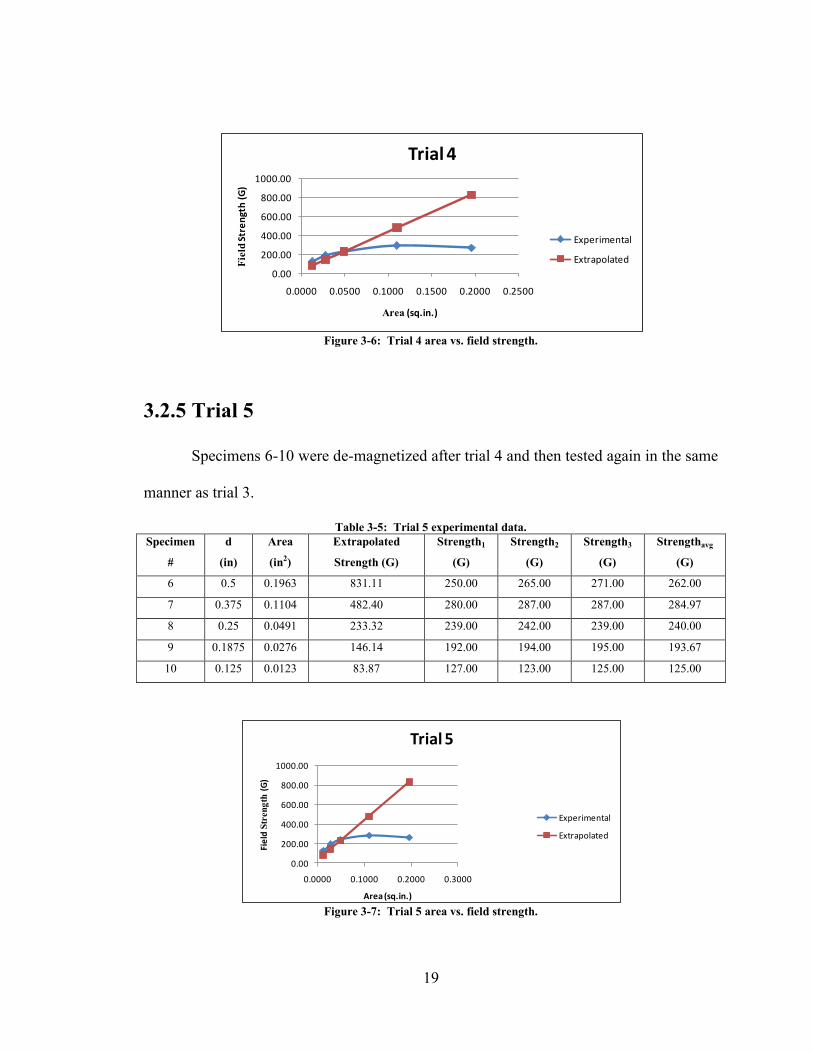
3.2.5 Trial 5
Specimens 6-10 were de-magnetized after trial 4 and then tested again in the same
manner as trial 3.
Table 3-5: Trial 5 experimental data. Specimen
#
d
(in)
Area
(in2)
Extrapolated
Strength (G)
Strength1
(G)
Strength2
(G)
Strength3
(G)
Strengthavg
(G)
6 0.5 0.1963 831.11 250.00 265.00 271.00 262.00
7 0.375 0.1104 482.40 280.00 287.00 287.00 284.97
8 0.25 0.0491 233.32 239.00 242.00 239.00 240.00
9 0.1875 0.0276 146.14 192.00 194.00 195.00 193.67
10 0.125 0.0123 83.87 127.00 123.00 125.00 125.00
Figure 3-7: Trial 5 area vs. field strength.
0.00
200.00
400.00
600.00
800.00
1000.00
0.0000 0.0500 0.1000 0.1500 0.2000 0.2500
Fiel
dSt
ren
gth
(G
)
Area (sq.in.)
Trial 4
Experimental
Extrapolated
0.00
200.00
400.00
600.00
800.00
1000.00
0.0000 0.1000 0.2000 0.3000
Fie
ld S
tren
gth
(G)
Area (sq.in.)
Trial 5
Experimental
Extrapolated
20
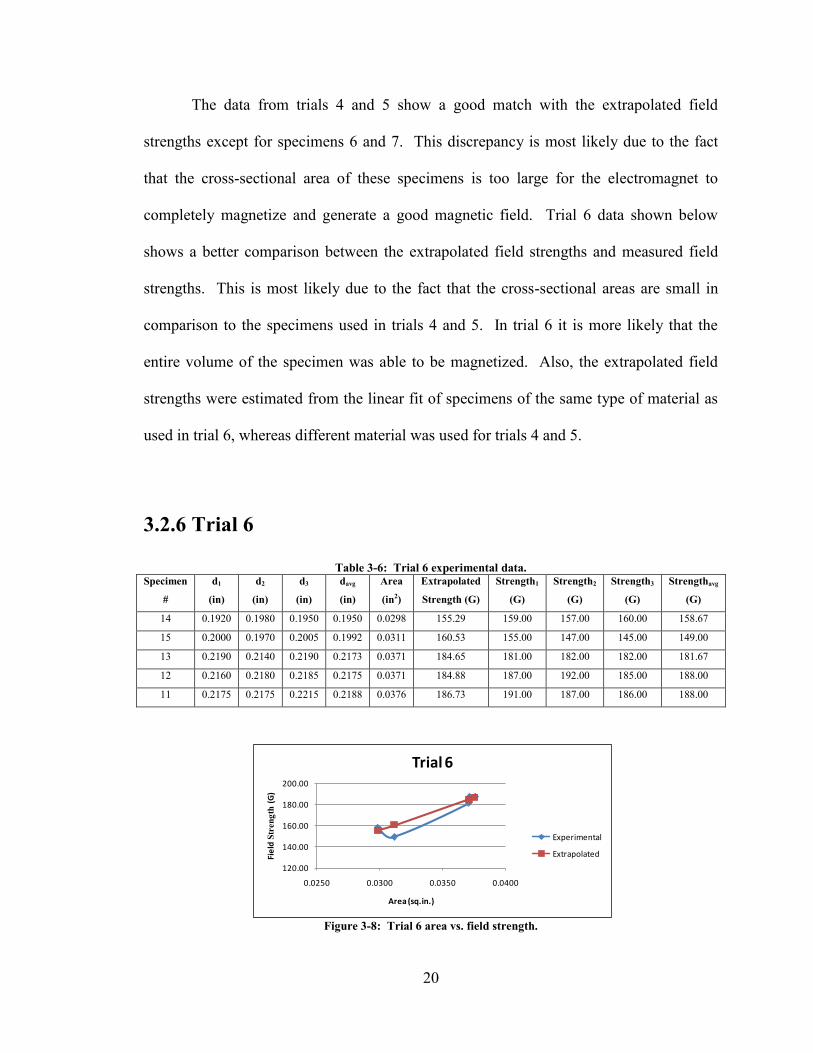
The data from trials 4 and 5 show a good match with the extrapolated field
strengths except for specimens 6 and 7. This discrepancy is most likely due to the fact
that the cross-sectional area of these specimens is too large for the electromagnet to
completely magnetize and generate a good magnetic field. Trial 6 data shown below
shows a better comparison between the extrapolated field strengths and measured field
strengths. This is most likely due to the fact that the cross-sectional areas are small in
comparison to the specimens used in trials 4 and 5. In trial 6 it is more likely that the
entire volume of the specimen was able to be magnetized. Also, the extrapolated field
strengths were estimated from the linear fit of specimens of the same type of material as
used in trial 6, whereas different material was used for trials 4 and 5.
3.2.6 Trial 6
Table 3-6: Trial 6 experimental data. Specimen
#
d1
(in)
d2
(in)
d3
(in)
davg
(in)
Area
(in2)
Extrapolated
Strength (G)
Strength1
(G)
Strength2
(G)
Strength3
(G)
Strengthavg
(G)
14 0.1920 0.1980 0.1950 0.1950 0.0298 155.29 159.00 157.00 160.00 158.67
15 0.2000 0.1970 0.2005 0.1992 0.0311 160.53 155.00 147.00 145.00 149.00
13 0.2190 0.2140 0.2190 0.2173 0.0371 184.65 181.00 182.00 182.00 181.67
12 0.2160 0.2180 0.2185 0.2175 0.0371 184.88 187.00 192.00 185.00 188.00
11 0.2175 0.2175 0.2215 0.2188 0.0376 186.73 191.00 187.00 186.00 188.00
Figure 3-8: Trial 6 area vs. field strength.
120.00
140.00
160.00
180.00
200.00
0.0250 0.0300 0.0350 0.0400
Fie
ld S
tren
gth
(G)
Area (sq.in.)
Trial 6
Experimental
Extrapolated
21
In addition to these trials, trials with concrete reinforcing bar specimens were
performed. The data collected consistently showed that a higher cross-sectional area
yielded a higher magnetic field strength. However, the readings of the field strength
varied a considerable amount. This is most likely due to the ribs in the rebar. If the
sensor was placed on a rib for a reading, the reading observed was much higher than if it
were placed on a smooth spot on the bar. In later work, this was resolved by mounting
the sensor on the pole face.
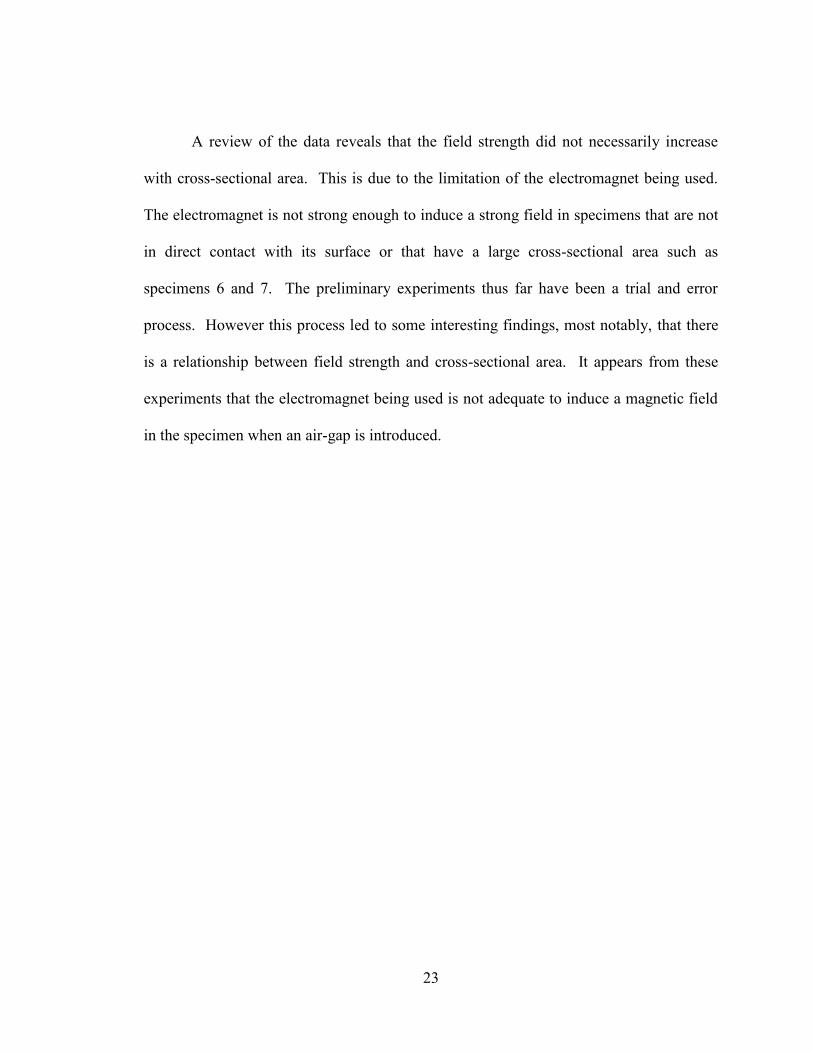
3.2.7 Trial 7
The next step in the experimental process was to put an air gap between the
magnet and specimen to simulate concrete cover. Trial 7 was the first trial done with an
eighth inch air gap. The set-up for this trial can be seen in figures 3-9 and 3-10. The data
collected from trial 7 can be seen in table 3-7. Also, a brief summary of all the trials can
be seen in table 3-8.
Figure 3-9: Trial 7 set-up. Figure 3-10: Trial 7 set-up.
22
Table 3- 7: Trial 7 experimental data.
Specimen
#
d1
(in)
d2
(in)
d3
(in)
davg
(in)
Area
(in2)
Strength1
(G)
Strength2
(G)
Strength3
(G)
Strengthavg
(G)
18 0.1955 0.1935 0.1955 0.1948 0.0298 121.00 120.00 119.00 120.00
16 0.1985 0.1935 0.1940 0.1953 0.0300 127.00 127.00 121.00 125.00
20 0.1995 0.1965 0.1930 0.1963 0.0303 122.00 120.00 120.00 120.67
17 0.2180 0.2165 0.2180 0.2175 0.0371 130.00 126.00 125.00 127.00
19 0.2170 0.2180 0.2185 0.2178 0.0372 130.00 126.00 125.00 127.00
Table 3-8: Brief summary of all trial experiments.
Trial # Procedure Result 1 Magnetized 1020 steel specimen. Increased field strength with increase in
cross-sectional area.
2 Magnetized and de-magnetized 1020 steel
specimens between readings.
Increased field strength with increase in
cross-sectional area. Effect of de-
magnetizing is negligible.
3 Magnetized 1020 specimens for 60 seconds
before reading.
Increased field strength with increase in
cross-sectional area. Timed magnetization
stabilized field and led to more consistent
readings.
4 Magnetized unknown grade of steel for 60
seconds before reading. Compared extrapolated
values taken from linear fit of data in trial 3.
Field did not increase with increase in
cross-sectional area. Poor comparison
between extrapolated and measured field
strengths.
5 Same as trial 4. Same as trial 4.
6 Same as trial 4 except with 1020 steel specimens. Increased field strength with increase in
cross-sectional area. Good comparison
between extrapolated and measured field
strengths.
7 Magnetized 1020 specimens through an eighth
inch air-gap.
Could not make a distinction between
cross-sectional areas.
23
A review of the data reveals that the field strength did not necessarily increase
with cross-sectional area. This is due to the limitation of the electromagnet being used.
The electromagnet is not strong enough to induce a strong field in specimens that are not
in direct contact with its surface or that have a large cross-sectional area such as
specimens 6 and 7. The preliminary experiments thus far have been a trial and error
process. However this process led to some interesting findings, most notably, that there
is a relationship between field strength and cross-sectional area. It appears from these
experiments that the electromagnet being used is not adequate to induce a magnetic field
in the specimen when an air-gap is introduced.
24
Chapter 4 Ohio Magnetics
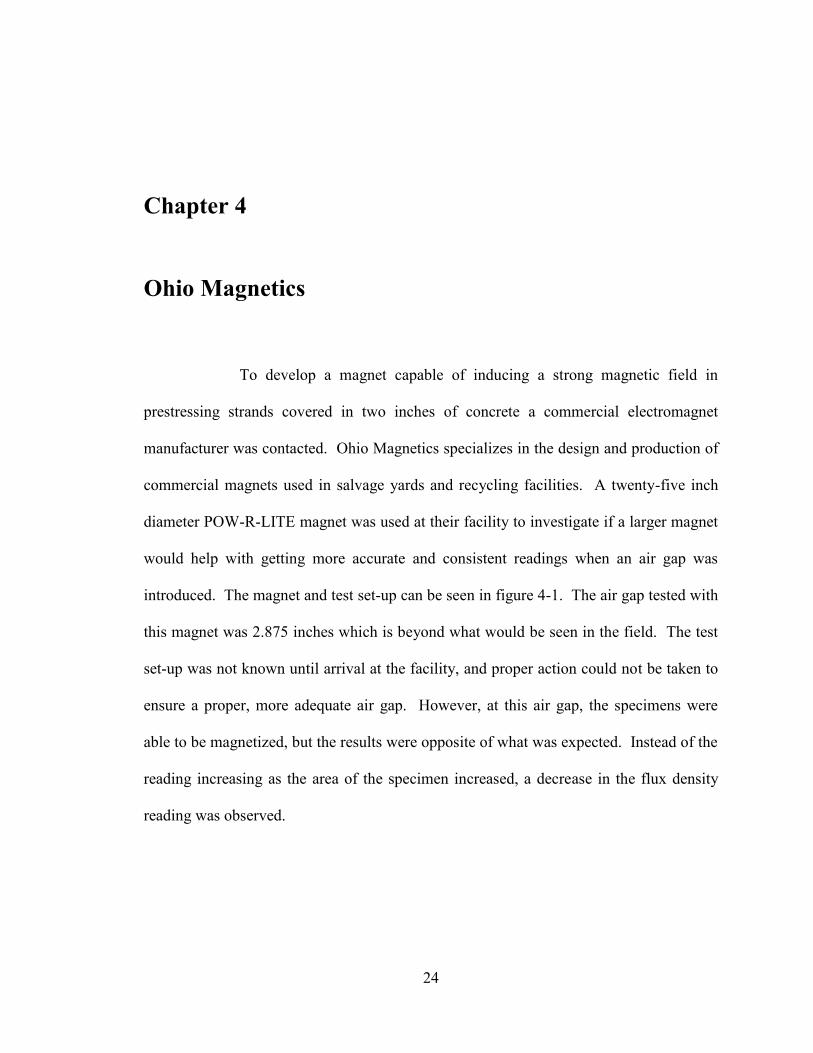
To develop a magnet capable of inducing a strong magnetic field in
prestressing strands covered in two inches of concrete a commercial electromagnet
manufacturer was contacted. Ohio Magnetics specializes in the design and production of
commercial magnets used in salvage yards and recycling facilities. A twenty-five inch
diameter POW-R-LITE magnet was used at their facility to investigate if a larger magnet
would help with getting more accurate and consistent readings when an air gap was
introduced. The magnet and test set-up can be seen in figure 4-1. The air gap tested with
this magnet was 2.875 inches which is beyond what would be seen in the field. The test
set-up was not known until arrival at the facility, and proper action could not be taken to
ensure a proper, more adequate air gap. However, at this air gap, the specimens were
able to be magnetized, but the results were opposite of what was expected. Instead of the
reading increasing as the area of the specimen increased, a decrease in the flux density
reading was observed.
25
Figure 4-1: Ohio Magnetics test set-up.
The design engineer at Ohio Magnetics explained that this observation was to be
expected. The magnet, constant in field strength, would have a harder time saturating a
larger specimen as it was moved further away from it. The Ohio Magnetics engineer also
explained that there is a theoretical basis for this behavior.
Further research led to the discovery of information and equations that could be
useful in grounding a theoretical basis for this work rather than a trial and error approach.
The research seemed to be promising that, with the known properties of the
electromagnet, steel specimen, and air-gap, the induced field or pulling force could be
calculated. These ideas were investigated further with joint collaboration between the
Electrical and Civil Engineering Departments.
Investigation into these equations proved to be difficult as there is an underlying
need for a background in electromagnets and their design. Attempts to use the equations
to determine the flux density in a specimen of known area, known air gap, and known
magnetic field were unsuccessful. This was believed to be due to the fact that the
specimens in question were cylindrical and it was unknown how much surface area was
26
exposed to the magnetic flux lines of the magnet, and also because only one yoke of the
magnet was being utilized. To further investigate this matter, it was decided to try the
equations with a flat specimen that would utilize both yokes in their entirety.
The use of a flat specimen in the equations was also unsuccessful. The results
obtained were not consistent or what was expected. From these investigations, two
conclusions were drawn about the use of these equations for our applications. First, the
equations were derived for a toroid shaped magnet; thus, possibly causing them to need
adjustments for a rectangular type magnet. Further, the air gap used for the derivation of
the equations refers to a small slit in the circular shape which creates a defined north and
south pole in the magnet. This change in the magnet causes the flux lines to flow from
one pole to the other, hence, the air gap is uniformly magnetized. Our application calls
for an air gap to be introduced not within the magnetic circuit, but externally. In our
application, the electromagnet yokes remain as a closed magnetic circuit and another
magnetic circuit is added by the application of the steel specimens; thus, the air gap
distance becomes crucial as the flux lines produced by the magnet are constant. The
reluctance of the air gap itself and the specimen also play a crucial role. Air has a high
reluctance to magnetic fields, so much of the energy is dissipated before reaching the
specimen. Secondly, it could very well be that our limited exposure to electromagnets
and their design has hindered our attempts to successfully use the equations. It may be
that we are just using the equations incorrectly or are making incorrect assumptions. If
this is the case, we have no way of checking ourselves since this a unique project with
ideas that have only been attempted by a few others. After these investigations and an
27
analysis of the results, it was decided to proceed on the assumption that the equations
were not suitable for our application.
Realizing that some theoretical basis was needed for our work, we decided to
conduct some experiments to determine if we would be able to derive our own equations.
We used a flat bar specimen as recommended by the engineer from Ohio Magnetics to
proceed with this investigation. The flat bar specimen was 2 inches wide by 8 inches in
length. The thicknesses of the specimens were 0.125, 0.1875, and 0.375 inches. The
Gauss probe was also taped in the center of the nearest yoke to ensure repeatability
between trials. In addition, the probe was zeroed to the effects of the electromagnet so
only the field being produced by the specimen was being measured. The results of these
experiments can be seen below in tables 4-1 and 4-2 and figures 4-2 and 4-3 .
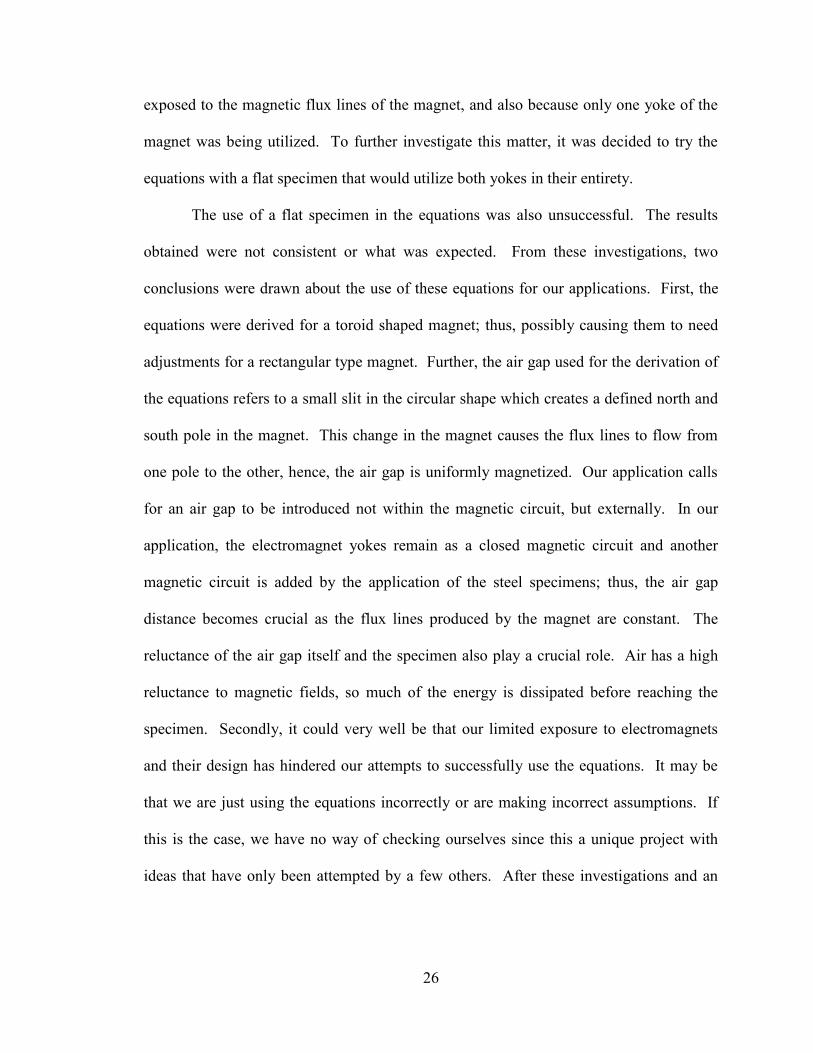
Table 4-1: 0.125 inch thick specimen results.
1/8 inch by 2 inch flat stock specimen
Measured flux density (B) in Gauss
Air-gap (g) in inches Trial 1 Trial 2 Avg.
0.25 533.0 490.0 511.5
0.56 115.0 116.0 115.5
1.00 31.0 30.0 30.5
1.50 7.0 7.0 7.0
2.00 3.0 3.0 3.0
28
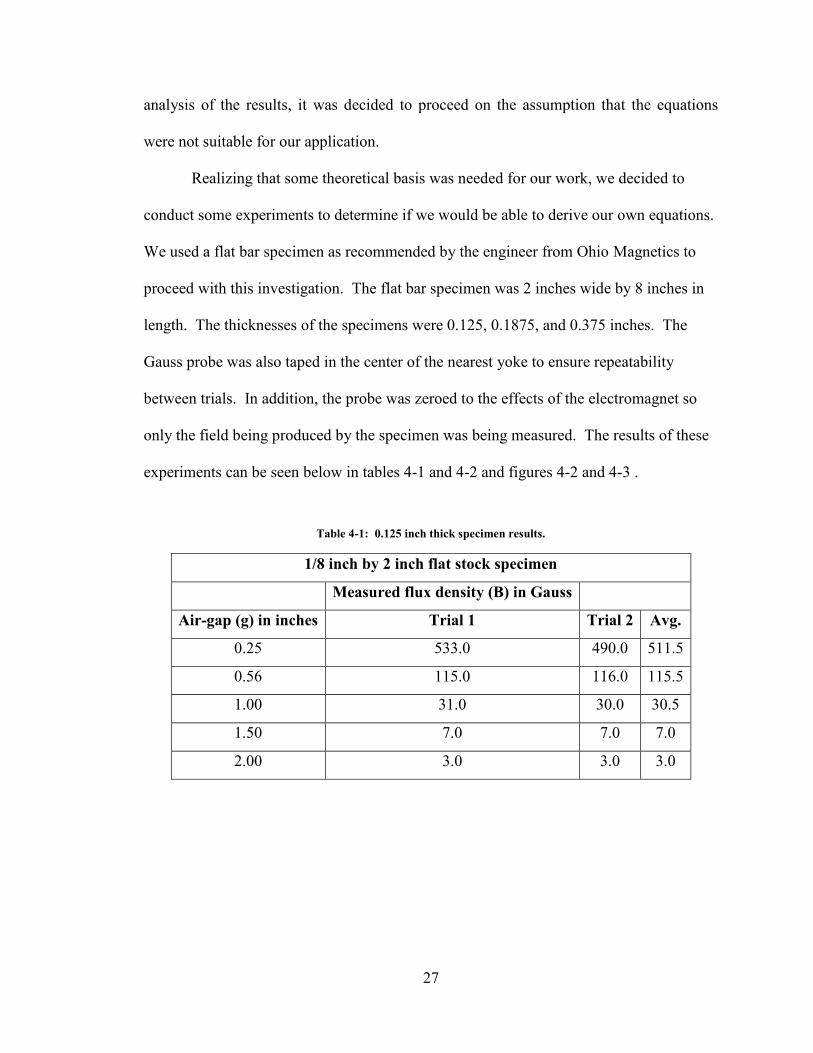
Table 4-2: 0.1875 inch thick specimen results.
3/16 inch by 2 inch flat stock specimen
Measured flux density (B) in Gauss
Air-gap (g) in inches Trial 1 Trial 2 Avg.
0.25 480.0 477.0 478.5
0.56 130.0 122.0 126.0
1.00 35.0 34.0 34.5
1.50 9.0 9.5 9.3
2.00 3.0 3.0 3.0
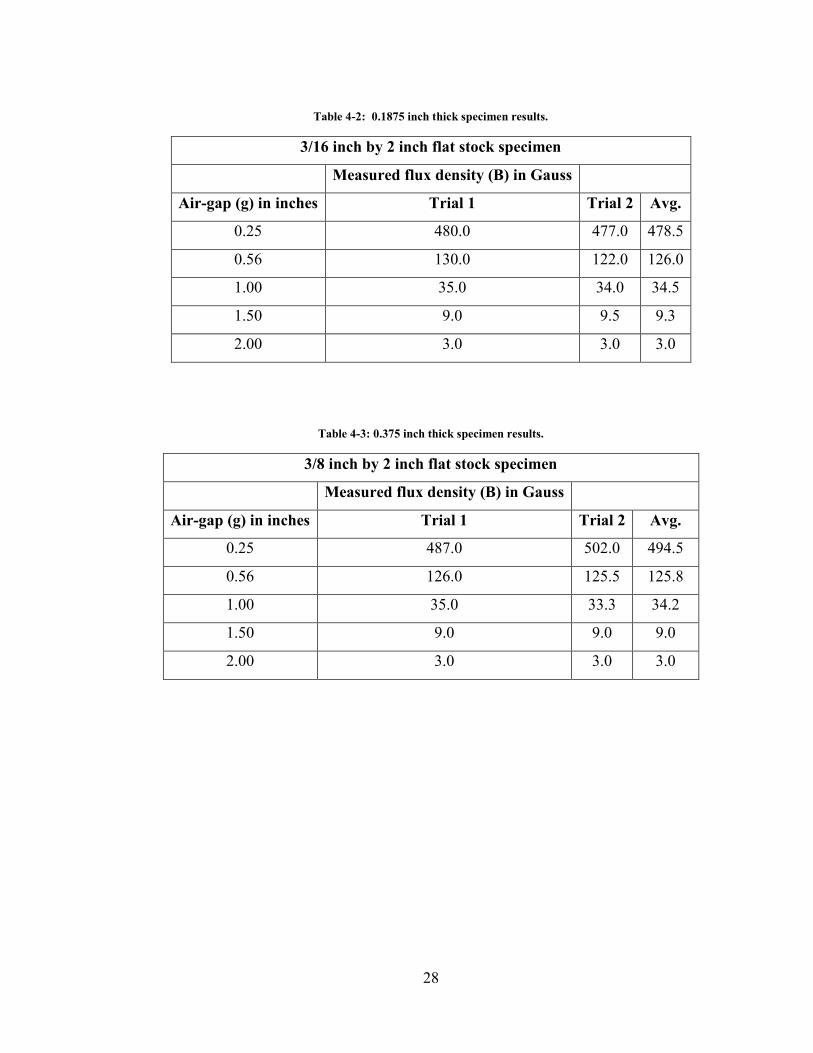
Table 4-3: 0.375 inch thick specimen results.
3/8 inch by 2 inch flat stock specimen
Measured flux density (B) in Gauss
Air-gap (g) in inches Trial 1 Trial 2 Avg.
0.25 487.0 502.0 494.5
0.56 126.0 125.5 125.8
1.00 35.0 33.3 34.2
1.50 9.0 9.0 9.0
2.00 3.0 3.0 3.0
29
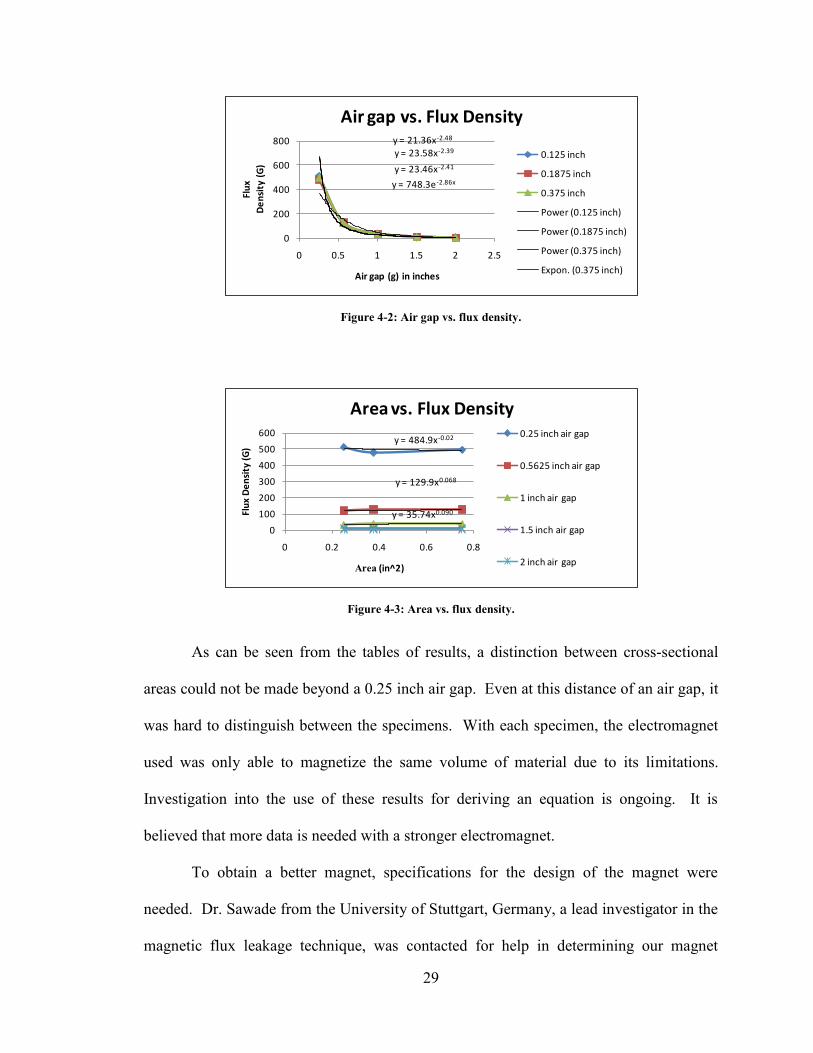
Figure 4-2: Air gap vs. flux density.
Figure 4-3: Area vs. flux density.
As can be seen from the tables of results, a distinction between cross-sectional
areas could not be made beyond a 0.25 inch air gap. Even at this distance of an air gap, it
was hard to distinguish between the specimens. With each specimen, the electromagnet
used was only able to magnetize the same volume of material due to its limitations.
Investigation into the use of these results for deriving an equation is ongoing. It is
believed that more data is needed with a stronger electromagnet.
To obtain a better magnet, specifications for the design of the magnet were
needed. Dr. Sawade from the University of Stuttgart, Germany, a lead investigator in the
magnetic flux leakage technique, was contacted for help in determining our magnet
y = 21.36x-2.48
y = 23.58x-2.39
y = 23.46x-2.41
y = 748.3e-2.86x
0
200
400
600
800
0 0.5 1 1.5 2 2.5Fl
ux
De
nsi
ty (
G)
Air gap (g) in inches
Air gap vs. Flux Density
0.125 inch
0.1875 inch
0.375 inch
Power (0.125 inch)
Power (0.1875 inch)
Power (0.375 inch)
Expon. (0.375 inch)
y = 484.9x-0.02
y = 129.9x0.068
y = 35.74x0.090
0
100
200
300
400
500
600
0 0.2 0.4 0.6 0.8
Flu
x D
en
sity
(G
)
Area (in^2)
Area vs. Flux Density0.25 inch air gap
0.5625 inch air gap
1 inch air gap
1.5 inch air gap
2 inch air gap
30
specifications. The magnet specifications we decided to use are the same used in
Germany for MLF as they have been successful in magnetizing specimens under several
inches of concrete. The magnetization should be by an electrically excited yoke (length
about 8 to 16 in.). The magnetic field should reach up to 381-508 Ampre
in . with the axial
component in the middle of the yoke. A gap of 8 in or less between working poles would
be acceptable. The field should also be adjustable through an autotransformer
arrangement.
These specifications were emailed to 3 different manufacturers to determine if
any of them had this or a similar magnet in stock (Ohio Magnetics, Magnetool,
Magnetechcorp). Ohio Magnetics was the manufacturer chosen to complete the design
and construction of the magnet. The first magnet design purposed by Ohio Magnetics
exceeded the criteria set-forth, but further investigation into the design led to a
component that could have hindered the success of the experiments. The proposed
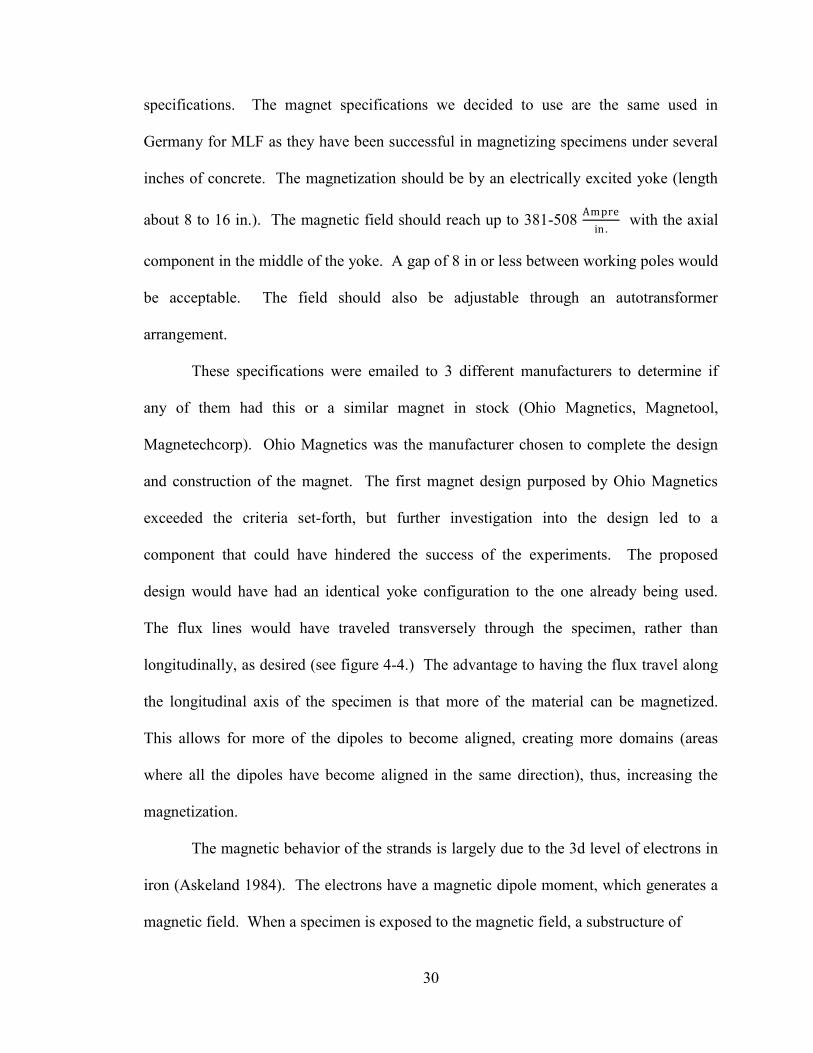
design would have had an identical yoke configuration to the one already being used.
The flux lines would have traveled transversely through the specimen, rather than
longitudinally, as desired (see figure 4-4.) The advantage to having the flux travel along
the longitudinal axis of the specimen is that more of the material can be magnetized.
This allows for more of the dipoles to become aligned, creating more domains (areas
where all the dipoles have become aligned in the same direction), thus, increasing the
magnetization.
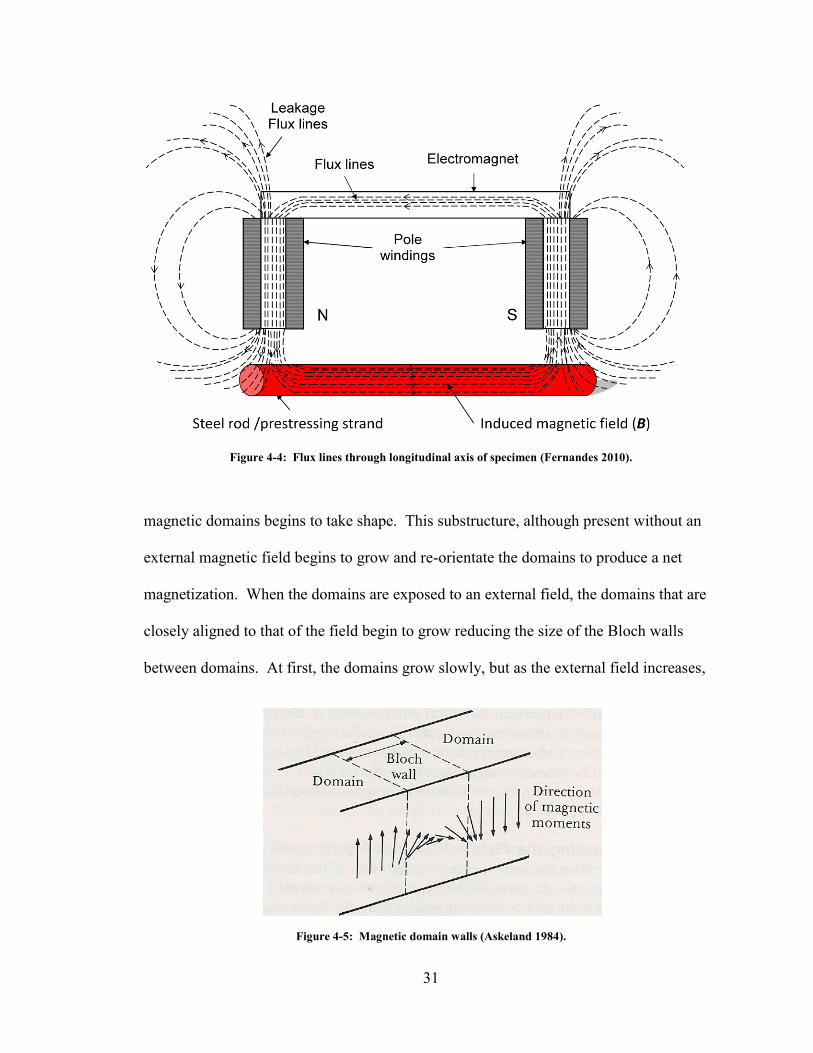
The magnetic behavior of the strands is largely due to the 3d level of electrons in
iron (Askeland 1984). The electrons have a magnetic dipole moment, which generates a
magnetic field. When a specimen is exposed to the magnetic field, a substructure of
31
Figure 4-4: Flux lines through longitudinal axis of specimen (Fernandes 2010).
magnetic domains begins to take shape. This substructure, although present without an
external magnetic field begins to grow and re-orientate the domains to produce a net
magnetization. When the domains are exposed to an external field, the domains that are
closely aligned to that of the field begin to grow reducing the size of the Bloch walls
between domains. At first, the domains grow slowly, but as the external field increases,
Figure 4-5: Magnetic domain walls (Askeland 1984).
32
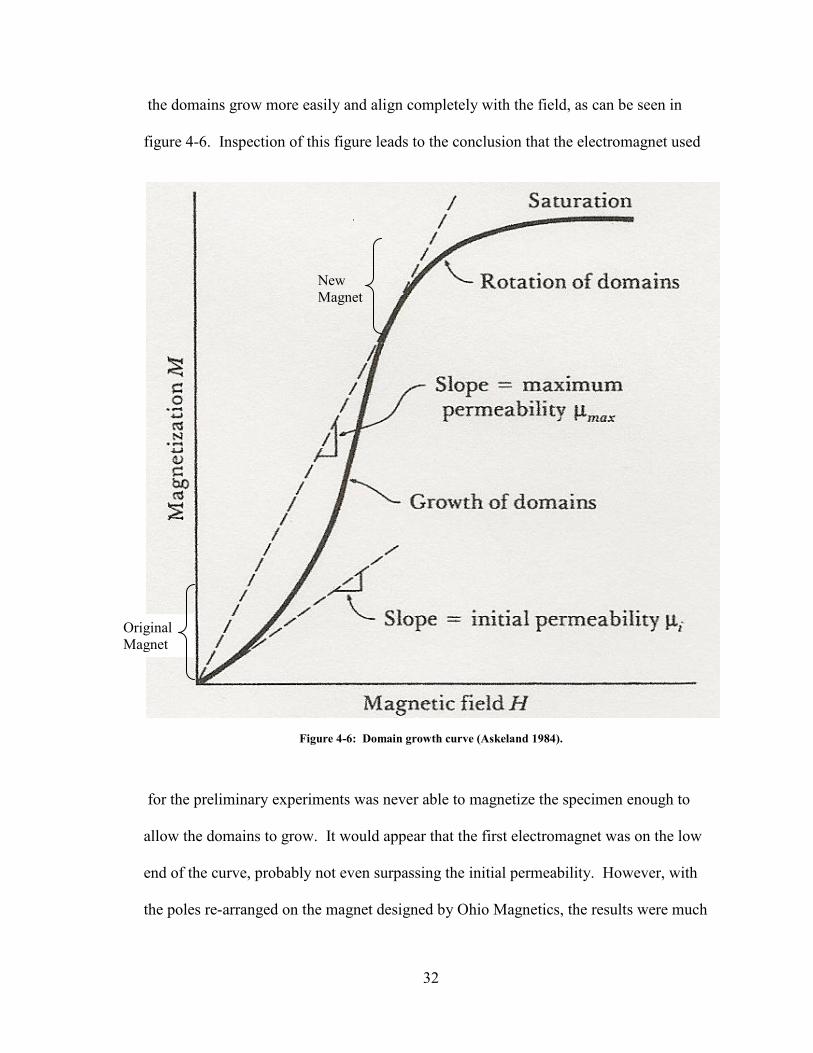
the domains grow more easily and align completely with the field, as can be seen in
figure 4-6. Inspection of this figure leads to the conclusion that the electromagnet used
Figure 4-6: Domain growth curve (Askeland 1984).
for the preliminary experiments was never able to magnetize the specimen enough to
allow the domains to grow. It would appear that the first electromagnet was on the low
end of the curve, probably not even surpassing the initial permeability. However, with
the poles re-arranged on the magnet designed by Ohio Magnetics, the results were much
Original Magnet
m
New Magnet
m
33
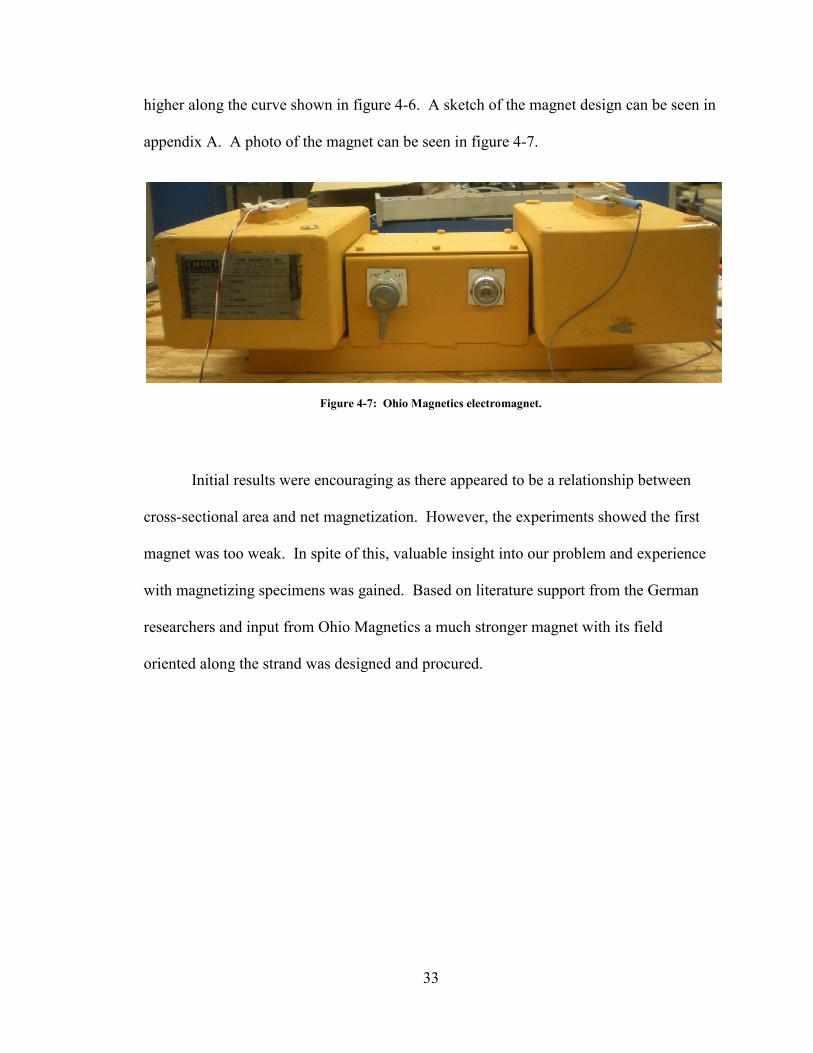
higher along the curve shown in figure 4-6. A sketch of the magnet design can be seen in
appendix A. A photo of the magnet can be seen in figure 4-7.
Figure 4-7: Ohio Magnetics electromagnet.
Initial results were encouraging as there appeared to be a relationship between
cross-sectional area and net magnetization. However, the experiments showed the first
magnet was too weak. In spite of this, valuable insight into our problem and experience
with magnetizing specimens was gained. Based on literature support from the German
researchers and input from Ohio Magnetics a much stronger magnet with its field
oriented along the strand was designed and procured.
34
Chapter 5 Experiments With Strong Magnet
Along with a new magnet, new testing procedures were adopted. When testing
the magnet at the Ohio Magnetics facility before acceptance of the product, the engineers
had decided to measure the induced field by placing the sensor on the pole face rather
than on the specimen. This was advantageous for two reasons: 1) It would eliminate
errors due to inconsistency in sensor placement along the specimen. 2) It was more field
applicable as the sensor could not be placed along a stand embedded in concrete.
5.1 Solid Steel Round Experiments
Other than the aforementioned changes, the testing with the new magnet was
similar to those used in the preliminary experiments. The readings for all experiments
discussed from this point forward were taken from the right pole face unless otherwise
noted. Due to the specimen being of uniform cross-section, readings from both pole
faces were not necessary. The specimens used were 1018 cold-rolled rounds with
diameters from 1
16" to 3
4" in sixteenth inch increments. The specimens were tested at
nine different air-gaps. The test set-up for this experiment can be seen in figure 5-1. The
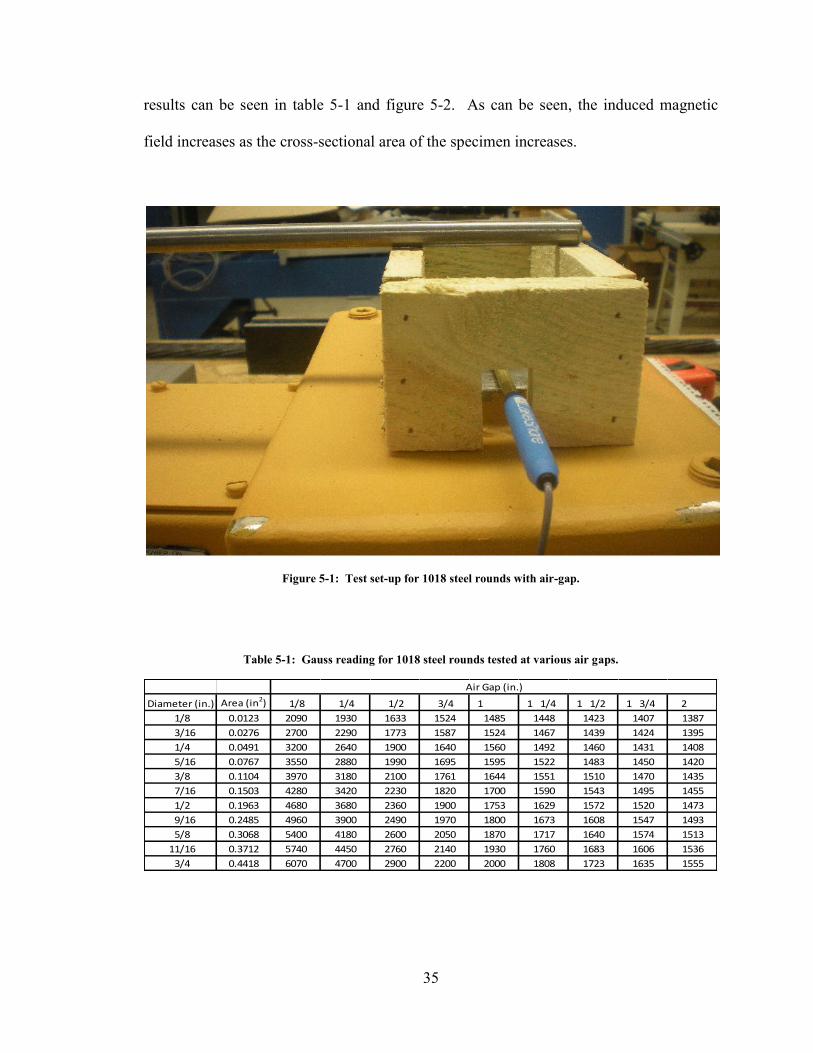
35
results can be seen in table 5-1 and figure 5-2. As can be seen, the induced magnetic
field increases as the cross-sectional area of the specimen increases.
Figure 5-1: Test set-up for 1018 steel rounds with air-gap.
Table 5-1: Gauss reading for 1018 steel rounds tested at various air gaps.
Diameter (in.) Area (in2) 1/8 1/4 1/2 3/4 1 1 1/4 1 1/2 1 3/4 2
1/8 0.0123 2090 1930 1633 1524 1485 1448 1423 1407 1387
3/16 0.0276 2700 2290 1773 1587 1524 1467 1439 1424 1395
1/4 0.0491 3200 2640 1900 1640 1560 1492 1460 1431 1408
5/16 0.0767 3550 2880 1990 1695 1595 1522 1483 1450 1420
3/8 0.1104 3970 3180 2100 1761 1644 1551 1510 1470 1435
7/16 0.1503 4280 3420 2230 1820 1700 1590 1543 1495 1455
1/2 0.1963 4680 3680 2360 1900 1753 1629 1572 1520 1473
9/16 0.2485 4960 3900 2490 1970 1800 1673 1608 1547 1493
5/8 0.3068 5400 4180 2600 2050 1870 1717 1640 1574 1513
11/16 0.3712 5740 4450 2760 2140 1930 1760 1683 1606 1536
3/4 0.4418 6070 4700 2900 2200 2000 1808 1723 1635 1555
Air Gap (in.)
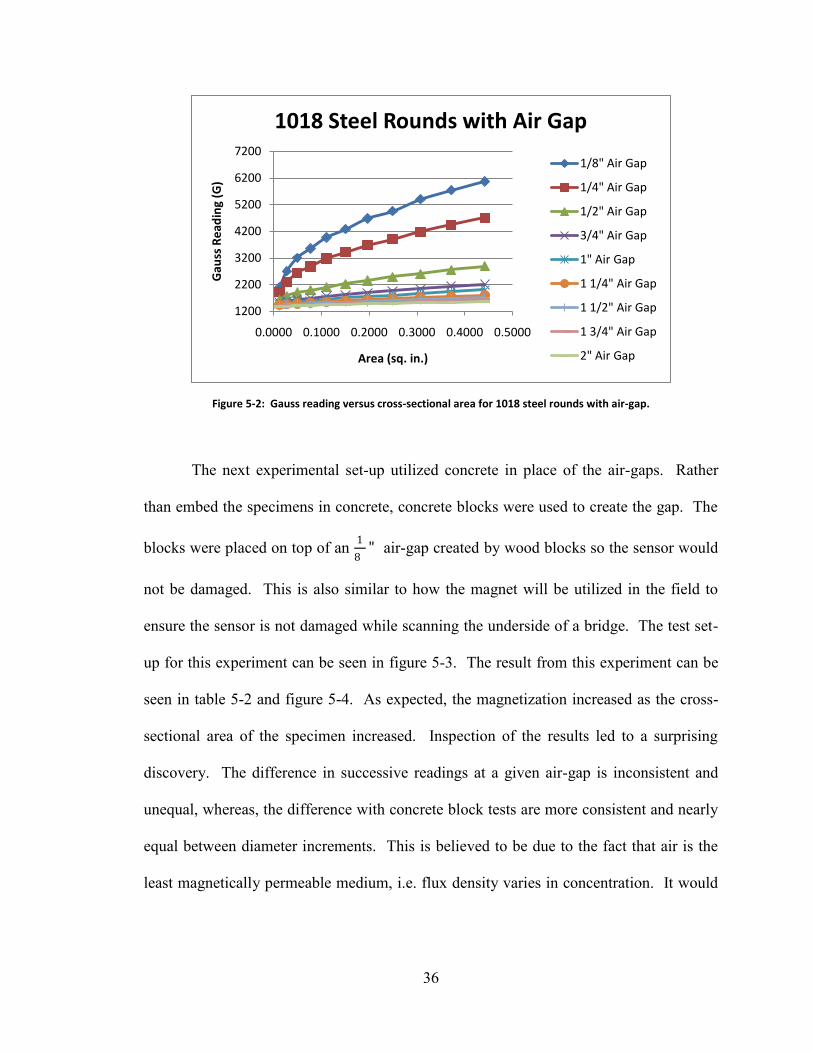
36
Figure 5-2: Gauss reading versus cross-sectional area for 1018 steel rounds with air-gap.
The next experimental set-up utilized concrete in place of the air-gaps. Rather
than embed the specimens in concrete, concrete blocks were used to create the gap. The
blocks were placed on top of an 1
8 " air-gap created by wood blocks so the sensor would
not be damaged. This is also similar to how the magnet will be utilized in the field to
ensure the sensor is not damaged while scanning the underside of a bridge. The test set-
up for this experiment can be seen in figure 5-3. The result from this experiment can be
seen in table 5-2 and figure 5-4. As expected, the magnetization increased as the cross-
sectional area of the specimen increased. Inspection of the results led to a surprising
discovery. The difference in successive readings at a given air-gap is inconsistent and
unequal, whereas, the difference with concrete block tests are more consistent and nearly
equal between diameter increments. This is believed to be due to the fact that air is the
least magnetically permeable medium, i.e. flux density varies in concentration. It would
1200
2200
3200
4200
5200
6200
7200
0.0000 0.1000 0.2000 0.3000 0.4000 0.5000
Gau
ss R
ead
ing
(G)
Area (sq. in.)
1018 Steel Rounds with Air Gap
1/8" Air Gap
1/4" Air Gap
1/2" Air Gap
3/4" Air Gap
1" Air Gap
1 1/4" Air Gap
1 1/2" Air Gap
1 3/4" Air Gap
2" Air Gap
37
appear from the results that the presence of the concrete medium allows the field density
to become more concentrated, thus producing more consistent results.
Figure 5-3: Test set-up for 1018 steel rounds with concrete gap.
Table 5-2: Gauss reading for 1018 steel rounds tested at various concrete gaps.
Diameter (in.) Area (in2) 7/8 1 1/8 1 1/4 1 5/16 1 15/16
1/8 0.0123 1552 1492 1457 1433 1405
3/16 0.0276 1605 1518 1475 1454 1413
1/4 0.0491 1656 1544 1498 1470 1421
5/16 0.0767 1708 1572 1526 1497 1434
3/8 0.1104 1760 1608 1560 1525 1453
7/16 0.1503 1834 1648 1593 1563 1475
1/2 0.1963 1900 1694 1633 1597 1495
9/16 0.2485 1974 1742 1672 1638 1517
5/8 0.3068 2010 1787 1714 1675 1538
11/16 0.3712 2120 1830 1758 1728 1562
3/4 0.4418 2210 1880 1800 1771 1588
Concrete Gap (in.)
38
1400
1600
1800
2000
2200
2400
0.0000 0.1000 0.2000 0.3000 0.4000 0.5000
Gau
ss R
ead
ing
(G)
Area (sq. in.)
1018 Steel Rounds with Concrete Gap
7/8" Gap
1 1/8" Gap
1 1/4" Gap
1 5/16" Gap
1 15/16" Gap
Figure 5-4: Gauss reading vs. cross-sectional area for 1018 steel rounds with concrete gap.
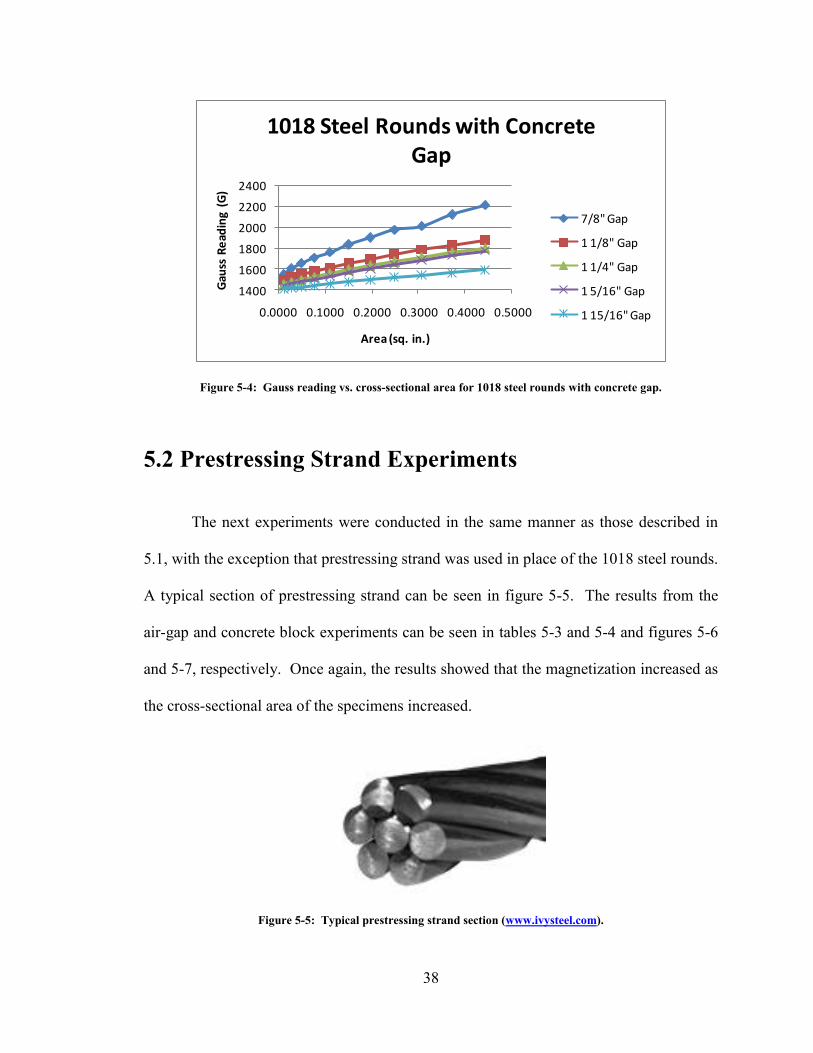
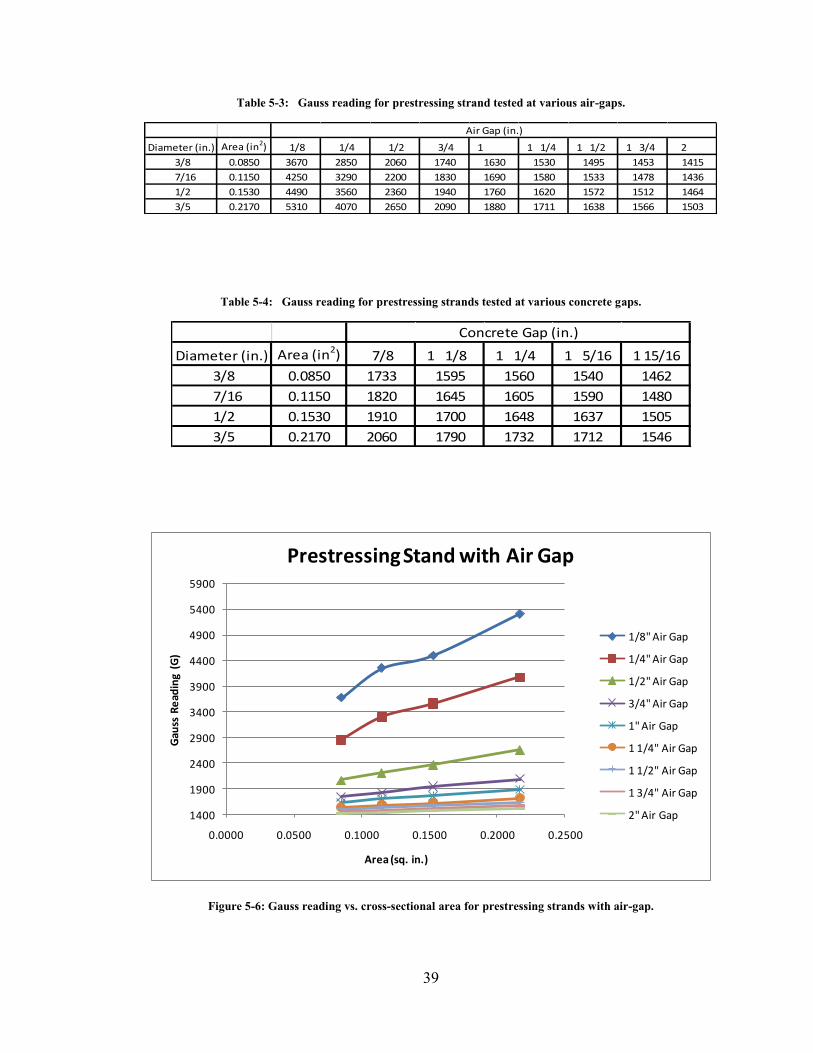
5.2 Prestressing Strand Experiments
The next experiments were conducted in the same manner as those described in
5.1, with the exception that prestressing strand was used in place of the 1018 steel rounds.
A typical section of prestressing strand can be seen in figure 5-5. The results from the
air-gap and concrete block experiments can be seen in tables 5-3 and 5-4 and figures 5-6
and 5-7, respectively. Once again, the results showed that the magnetization increased as
the cross-sectional area of the specimens increased.
Figure 5-5: Typical prestressing strand section (www.ivysteel.com).
39
Table 5-3: Gauss reading for prestressing strand tested at various air-gaps.
Diameter (in.) Area (in2) 1/8 1/4 1/2 3/4 1 1 1/4 1 1/2 1 3/4 2
3/8 0.0850 3670 2850 2060 1740 1630 1530 1495 1453 1415
7/16 0.1150 4250 3290 2200 1830 1690 1580 1533 1478 1436
1/2 0.1530 4490 3560 2360 1940 1760 1620 1572 1512 1464
3/5 0.2170 5310 4070 2650 2090 1880 1711 1638 1566 1503
Air Gap (in.)
Table 5-4: Gauss reading for prestressing strands tested at various concrete gaps.
Diameter (in.) Area (in2) 7/8 1 1/8 1 1/4 1 5/16 1 15/16
3/8 0.0850 1733 1595 1560 1540 1462
7/16 0.1150 1820 1645 1605 1590 1480
1/2 0.1530 1910 1700 1648 1637 1505
3/5 0.2170 2060 1790 1732 1712 1546
Concrete Gap (in.)
1400
1900
2400
2900
3400
3900
4400
4900
5400
5900
0.0000 0.0500 0.1000 0.1500 0.2000 0.2500
Gau
ss R
ead
ing
(G)
Area (sq. in.)
Prestressing Stand with Air Gap
1/8" Air Gap
1/4" Air Gap
1/2" Air Gap
3/4" Air Gap
1" Air Gap
1 1/4" Air Gap
1 1/2" Air Gap
1 3/4" Air Gap
2" Air Gap
Figure 5-6: Gauss reading vs. cross-sectional area for prestressing strands with air-gap.
40
1450
1650
1850
2050
2250
0.0000 0.0500 0.1000 0.1500 0.2000 0.2500
Gau
ss R
ead
ing
(G)
Area (sq. in.)
Prestressing Strand with Concrete Gap
7/8" Gap
1 1/8" Gap
1 1/4" Gap
1 5/16" Gap
1 15/16" Gap
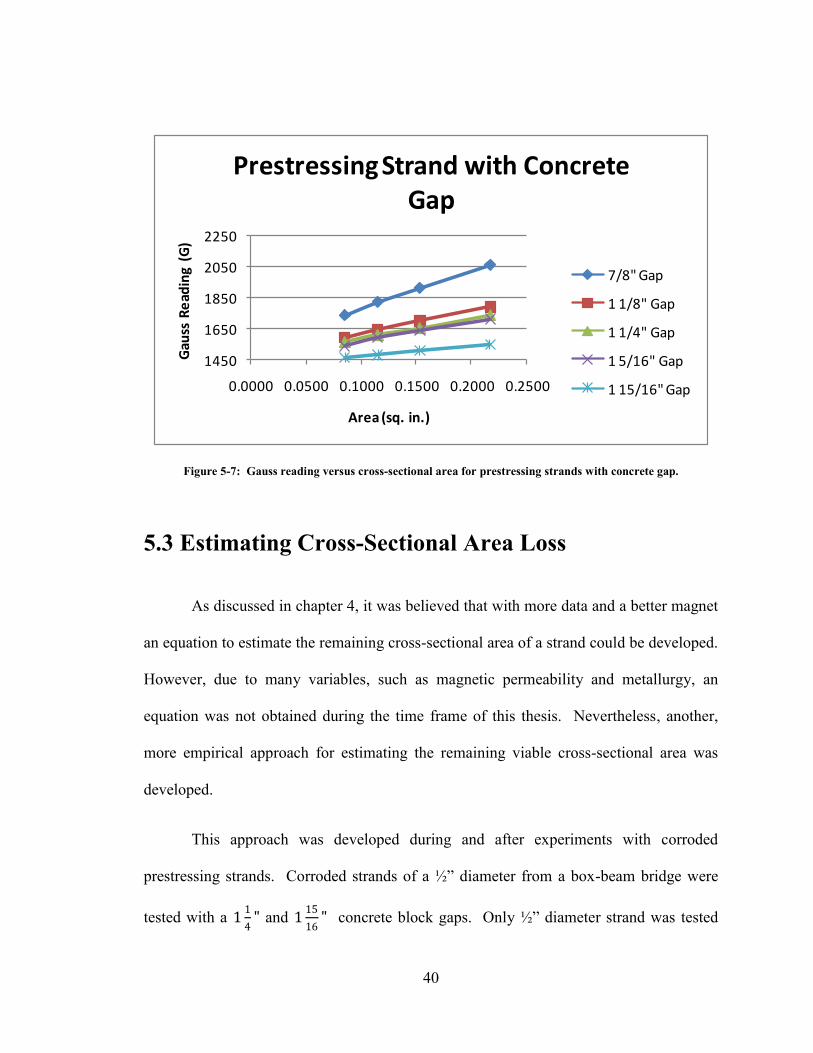
Figure 5-7: Gauss reading versus cross-sectional area for prestressing strands with concrete gap.
5.3 Estimating Cross-Sectional Area Loss
As discussed in chapter 4, it was believed that with more data and a better magnet
an equation to estimate the remaining cross-sectional area of a strand could be developed.
However, due to many variables, such as magnetic permeability and metallurgy, an
equation was not obtained during the time frame of this thesis. Nevertheless, another,
more empirical approach for estimating the remaining viable cross-sectional area was
developed.
This approach was developed during and after experiments with corroded
prestressing strands. Corroded strands of a ½” diameter from a box-beam bridge were
tested with a 11
4" and 1
15
16" concrete block gaps. Only ½” diameter strand was tested
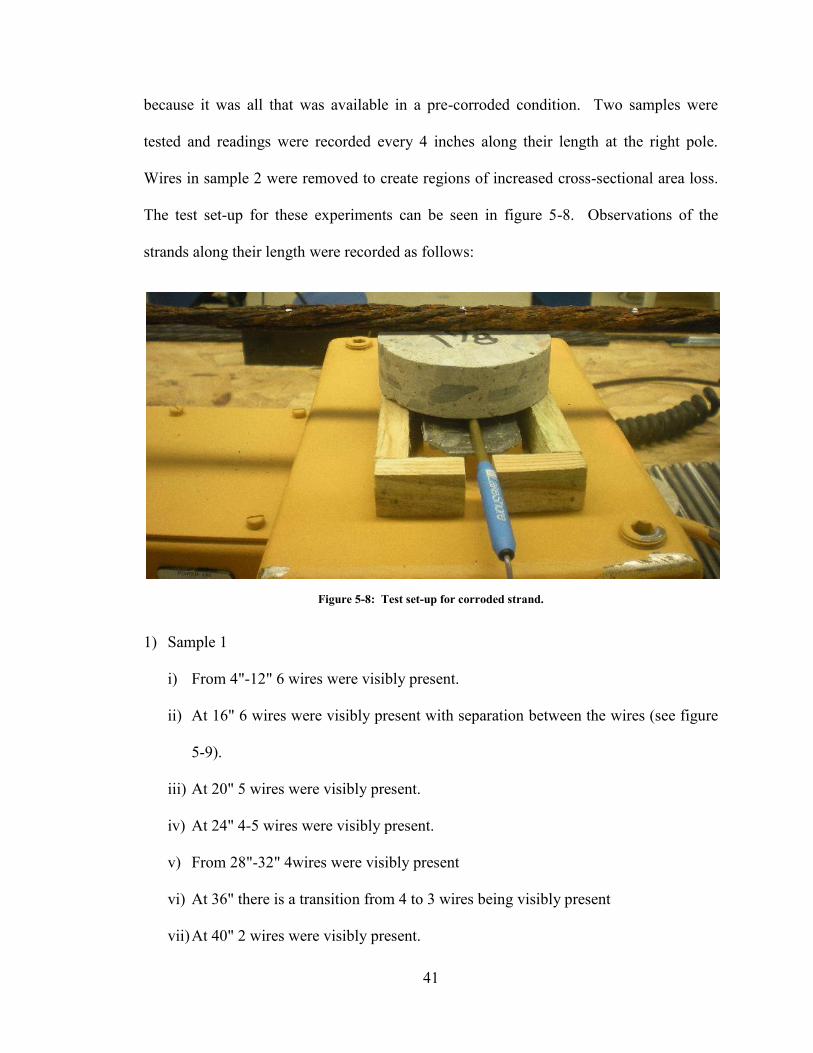
41
because it was all that was available in a pre-corroded condition. Two samples were
tested and readings were recorded every 4 inches along their length at the right pole.
Wires in sample 2 were removed to create regions of increased cross-sectional area loss.
The test set-up for these experiments can be seen in figure 5-8. Observations of the
strands along their length were recorded as follows:
Figure 5-8: Test set-up for corroded strand.
1) Sample 1
i) From 4"-12" 6 wires were visibly present.
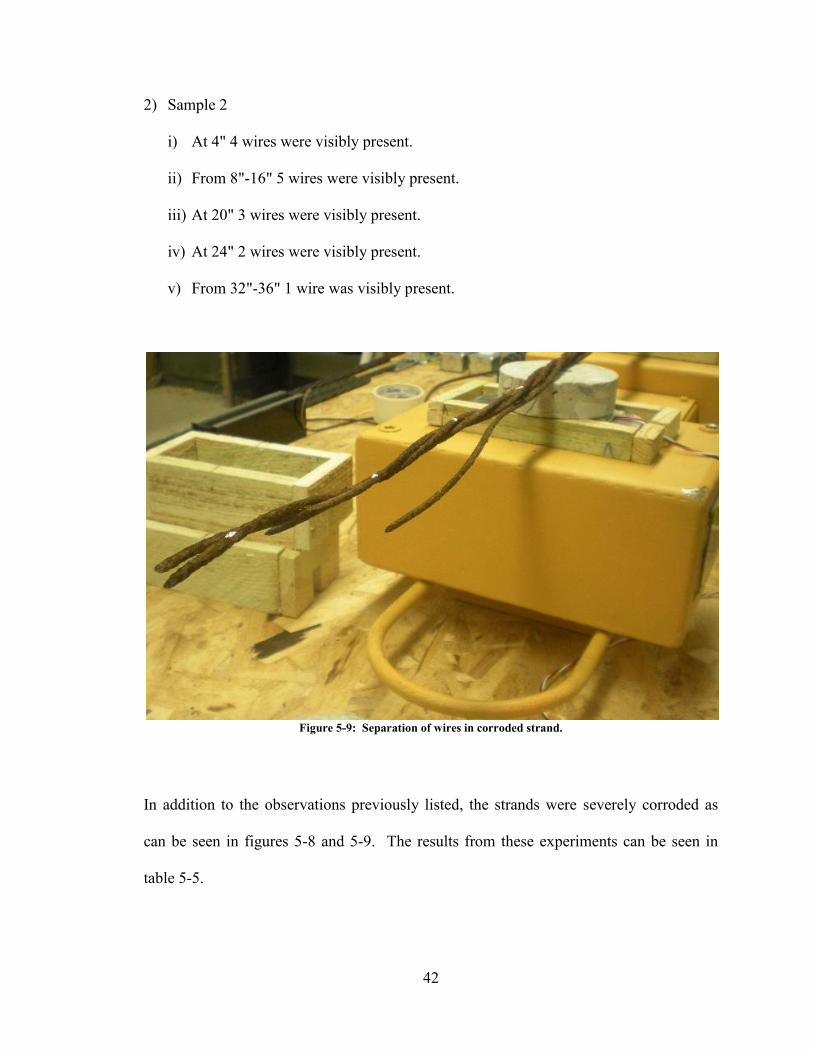
ii) At 16" 6 wires were visibly present with separation between the wires (see figure
5-9).
iii) At 20" 5 wires were visibly present.
iv) At 24" 4-5 wires were visibly present.
v) From 28"-32" 4wires were visibly present
vi) At 36" there is a transition from 4 to 3 wires being visibly present
vii) At 40" 2 wires were visibly present.
42
2) Sample 2
i) At 4" 4 wires were visibly present.
ii) From 8"-16" 5 wires were visibly present.
iii) At 20" 3 wires were visibly present.
iv) At 24" 2 wires were visibly present.
v) From 32"-36" 1 wire was visibly present.
Figure 5-9: Separation of wires in corroded strand.
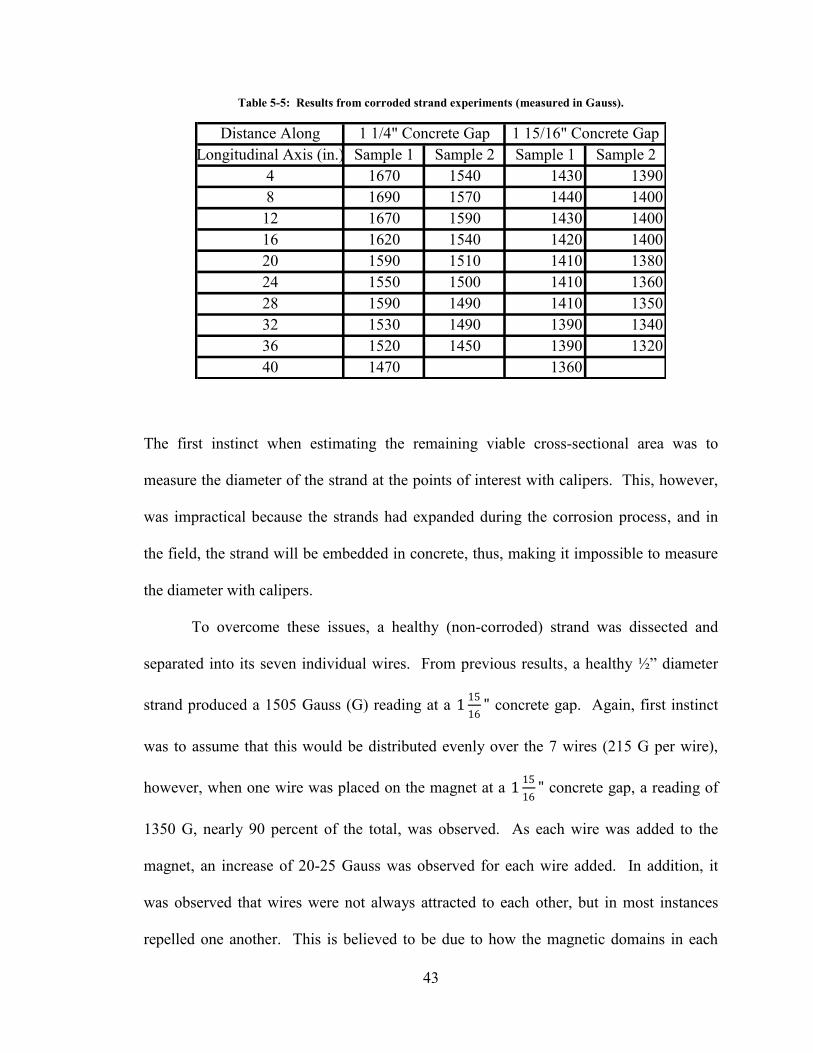
In addition to the observations previously listed, the strands were severely corroded as
can be seen in figures 5-8 and 5-9. The results from these experiments can be seen in
table 5-5.
43
Table 5-5: Results from corroded strand experiments (measured in Gauss).
Sample 1 Sample 2 Sample 1 Sample 21670 1540 1430 13901690 1570 1440 14001670 1590 1430 14001620 1540 1420 14001590 1510 1410 13801550 1500 1410 13601590 1490 1410 13501530 1490 1390 13401520 1450 1390 13201470 1360
Distance Along
40
1 1/4" Concrete Gap 1 15/16" Concrete Gap
2024283236
Longitudinal Axis (in.)48
1216
The first instinct when estimating the remaining viable cross-sectional area was to
measure the diameter of the strand at the points of interest with calipers. This, however,
was impractical because the strands had expanded during the corrosion process, and in
the field, the strand will be embedded in concrete, thus, making it impossible to measure
the diameter with calipers.
To overcome these issues, a healthy (non-corroded) strand was dissected and
separated into its seven individual wires. From previous results, a healthy ½” diameter
strand produced a 1505 Gauss (G) reading at a 115
16" concrete gap. Again, first instinct
was to assume that this would be distributed evenly over the 7 wires (215 G per wire),
however, when one wire was placed on the magnet at a 115
16" concrete gap, a reading of
1350 G, nearly 90 percent of the total, was observed. As each wire was added to the
magnet, an increase of 20-25 Gauss was observed for each wire added. In addition, it
was observed that wires were not always attracted to each other, but in most instances
repelled one another. This is believed to be due to how the magnetic domains in each
44
wire align themselves in the field. The orientation of one wire to another produces a give
and take affect that results in a net magnetization of 1505 G when they are all together.
With the data and observations from the experiments, an approach to estimate the
remaining viable cross-sectional area was proposed.
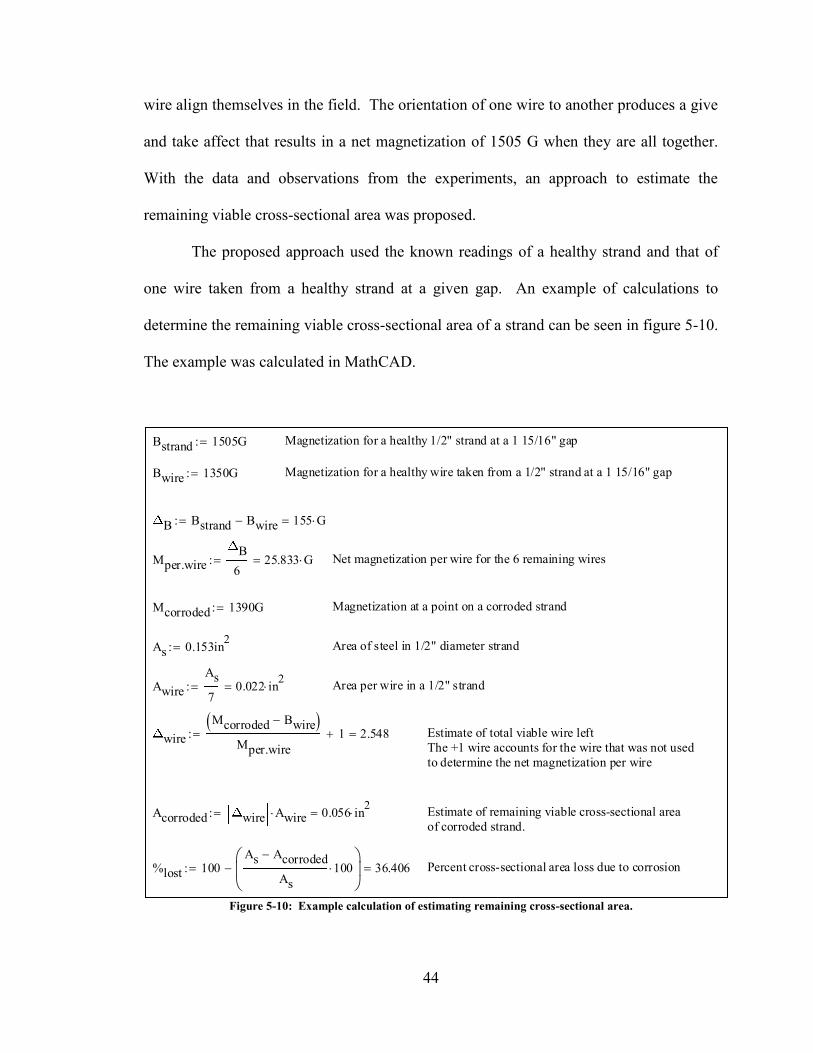
The proposed approach used the known readings of a healthy strand and that of
one wire taken from a healthy strand at a given gap. An example of calculations to
determine the remaining viable cross-sectional area of a strand can be seen in figure 5-10.
The example was calculated in MathCAD.
Figure 5-10: Example calculation of estimating remaining cross-sectional area.
Bstrand 1505G:= Magnetization for a healthy 1/2" strand at a 1 15/16" gap
Bwire 1350G:= Magnetization for a healthy wire taken from a 1/2" strand at a 1 15/16" gap
B Bstrand Bwire- 155 G=:=
Mper.wireB
625.833 G=:= Net magnetization per wire for the 6 remaining wires
Mcorroded 1390G:= Magnetization at a point on a corroded strand
As 0.153in2:= Area of steel in 1/2" diameter strand
AwireAs7
0.022 in2=:= Area per wire in a 1/2" strand
wireMcorroded Bwire-( )
Mper.wire1+ 2.548=:= Estimate of total viable wire left
The +1 wire accounts for the wire that was not usedto determine the net magnetization per wire
Acorroded wire Awire 0.056 in2=:= Estimate of remaining viable cross-sectional area
of corroded strand.
%lost 100As Acorroded-
As100
- 36.406=:= Percent cross-sectional area loss due to corrosion
45
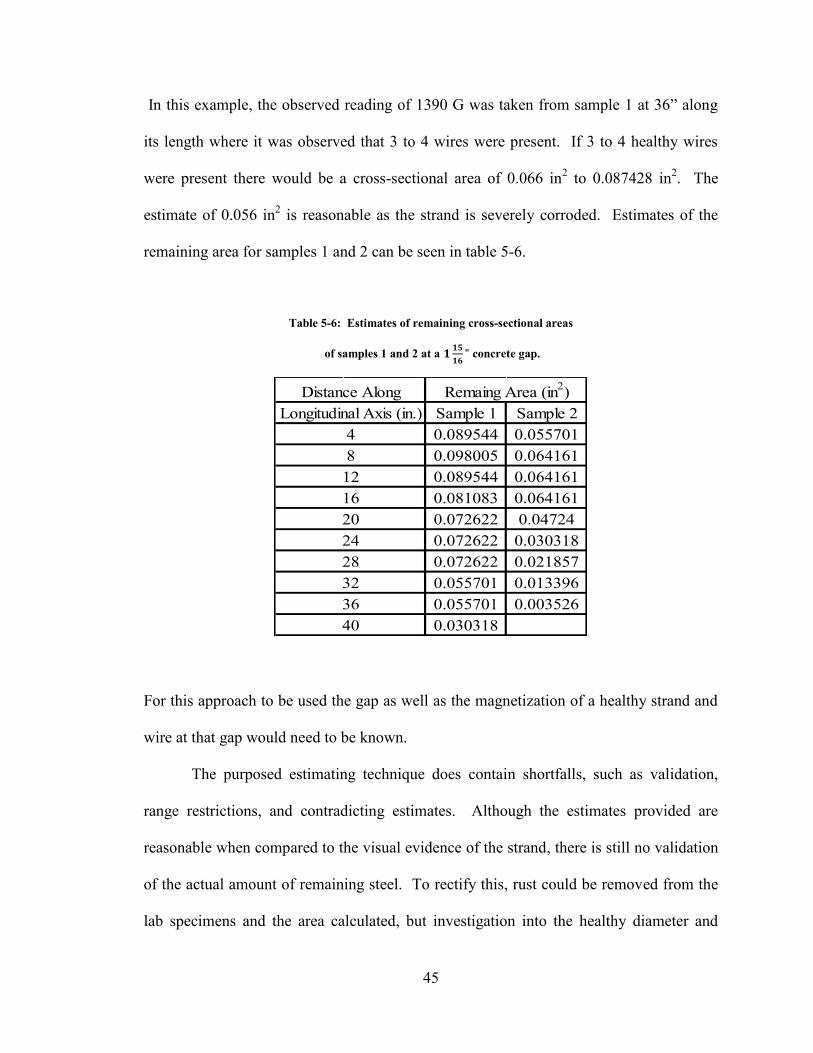
In this example, the observed reading of 1390 G was taken from sample 1 at 36” along
its length where it was observed that 3 to 4 wires were present. If 3 to 4 healthy wires
were present there would be a cross-sectional area of 0.066 in2 to 0.087428 in2. The
estimate of 0.056 in2 is reasonable as the strand is severely corroded. Estimates of the
remaining area for samples 1 and 2 can be seen in table 5-6.
Table 5-6: Estimates of remaining cross-sectional areas
of samples 1 and 2 at a 𝟏 𝟏𝟓
𝟏𝟔" concrete gap.
Sample 1 Sample 20.089544 0.0557010.098005 0.0641610.089544 0.0641610.081083 0.0641610.072622 0.047240.072622 0.0303180.072622 0.0218570.055701 0.0133960.055701 0.0035260.030318
Distance Along
16202428323640
Remaing Area (in2)Longitudinal Axis (in.)
48
12
For this approach to be used the gap as well as the magnetization of a healthy strand and
wire at that gap would need to be known.
The purposed estimating technique does contain shortfalls, such as validation,
range restrictions, and contradicting estimates. Although the estimates provided are
reasonable when compared to the visual evidence of the strand, there is still no validation
of the actual amount of remaining steel. To rectify this, rust could be removed from the
lab specimens and the area calculated, but investigation into the healthy diameter and
46
area of a ½” nominal strand has hindered this attempt. The area of steel listed with a ½”
strand is 0.153in2 which when distributed over seven wires yields 0.021857in2 per wire.
This in turn yields a calculated diameter of 0.1668in., which does not match the measured
diameter of 0.130in. The area of 0.153in2 may be nominalized and be the reason for this
discrepancy. Neither the ASTM nor other publications have an explanation of how the
area is calculated or give an approximate diameter size for the wires that are to be used in
the strand. Investigation into this issue will need to be continued so this or any other
estimation approach can be properly calibrated.
Another shortcoming of this approach may be attributed to inadequate field
strength. As previously mentioned, the magnetization of one wire is 1350G, which is
within the range of the estimating approach, but once the magnetization drops below
approximately 1320G the estimate increases from the expected. One explanation of this
discrepancy is due to the field strength of the magnet being used.
The field strength of the magnet alone on the right pole is 1460G. At 115
16"
concrete gap a ½” diameter strand has a magnetization of 1505G. From other specimens
tested at smaller gaps, it is known that the magnetization of a ½” diameter specimen is
capable of being higher. As with the first magnet at this distance, there is less
magnetization. In short, the magnetic capacity of the strand is not being filled. However,
at this same distance (1 15
16") the wire’s capacity may be filled or at least have a higher a
higher degree of saturation to area than the strand. This cause’s a few problems when
trying to estimate the area. The estimation is more or less based on a linear approach, but
the data show that the magnetization although nearly linear, is curved. Nevertheless, it
47
appears that this causes the estimates to err on the side of caution, i.e. there is more area
remaining than estimated.
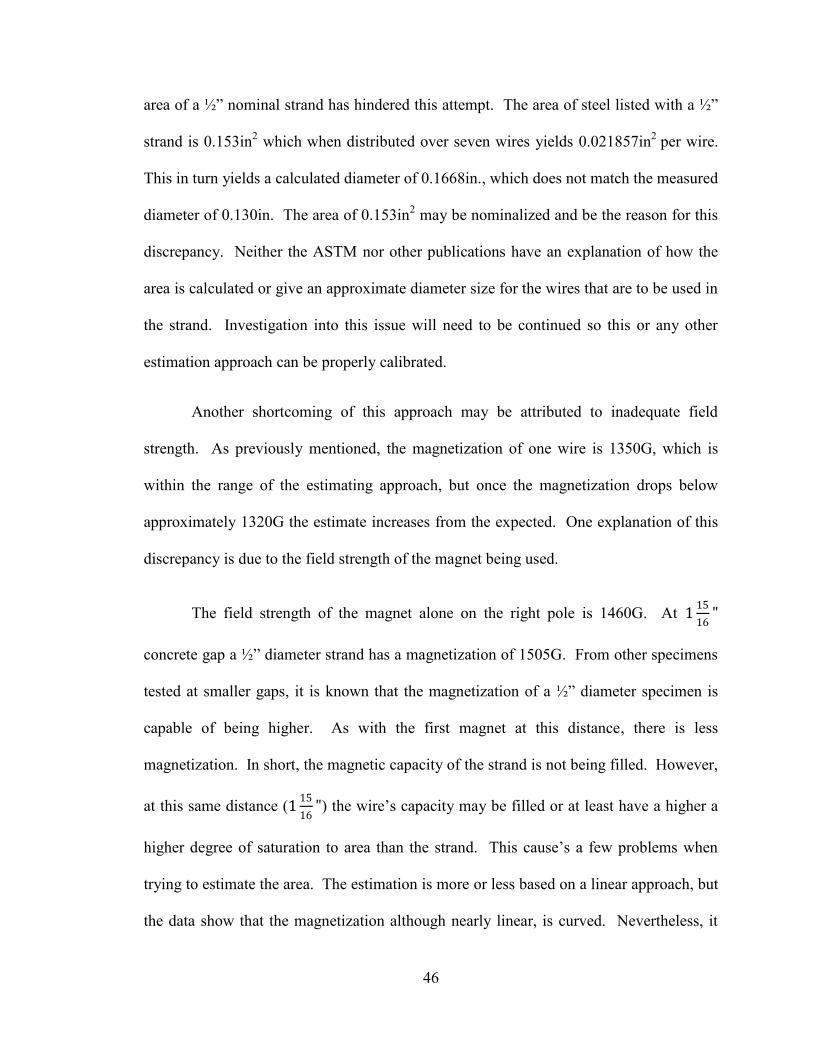
The other problem is that there could be two estimates for a magnetization of
1460G; 0in2 or 0.115in2 for this region. Since the magnetization curve of a strand or any
other ferromagnetic material is non-linear (see figure 5-11), there will be errors when
estimating the area. Nonetheless, these errors could be minimized by optimizing the
electromagnet design for size of specimens and gap being tested for. In other words, if
the field strength were increased to ensure the specimens being magnetized would be at
or near complete saturation, the error in estimating would be reduced as the data would
become more linearized. Until such an electromagnet becomes available, the estimating
approach proposed here gives reasonable, conservative estimates and, with more testing
and scrutinization, could become an effective estimating tool.
Figure 5-11: Magnetization curve for iron (http://info.ee.surrey.ac.uk/Workshop/advice/coils/mu/BH_iron.png)
48
Chapter 6 Conclusion 6.1 Results
The results obtained thus far are promising that this will develop into a new
magnetic NDE technique. A consistent reliable relationship between cross-sectional area
and magnetization was found for a variety of steel specimens, including corroded
prestressing strand at varying distances from the magnet face. It was observed that as the
cross-sectional area of the specimens increased so did the magnetization. An approach
for estimating the remaining area of corroded strands was developed. The estimate
results seemed reasonable when compared with visual inspection of the strand. This
research has demonstrated that the proposed electromagnetic system for detection of
corrosion in deteriorated prestressing strand has significant potential. The primary
objective, proof of concept, was achieved.
6.2 Future Research
Thus far, the research and results have demonstrated that the technique proposed
in this thesis has potential. To further validate this technique more laboratory
49
experiments, field tests, and theoretical work must be completed. Laboratory testing
should consist of embedding strands in concrete at various distances. These experiments
should be used to validate and calibrate, or invalidate the estimating method proposed in
Chapter 5. Also, water content is believed to affect the magnetization of the strands, so
testing should be done at various time intervals as the concrete hardens and the water
content decreases. In addition, the influence of neighboring prestressing strands and/or
mild reinforcement needs to be investigated. These experiments should be similar in
geometric configuration as what can be expected in a bridge beam.
Field tests would involve the scanning of a beam on an existing bridge. A
bridge scheduled for demolition by ODOT has been identified as a potential candidate for
field testing. However, before field testing could be done, a carriage system for the
magnet needs to be developed. Currently, this system is being developed at The
University of Toledo.
Data acquisition and analysis would also need to become quicker and
computerized. Currently, a data acquisition system has been used to re-complete the
preliminary experiments with the 1018 steel rounds. However, it was discovered that the
Hall sensors being used did not have the capacity to produce accurate results at certain
gaps and specimen diameters. New sensors for this system are being ordered, as well as
transitioning the system from a desktop computer to a laptop.
The complexity of this technique also requires that an expert in metallurgy be
consulted. It is known that the magnetic properties are changed with the introduction of
defects, such as dislocations, grain boundaries, and boundaries between phases in the
atomic structure. Also, the stress state of the strand will change its magnetic properties.
50
The unknown is how much these defects and the stress state will affect the overall
estimate of remaining cross-sectional area and how they can be accounted for. With new
experimental data and metallurgical data, the estimating approach proposed can be
calibrated or a new approach can be developed to estimate the remaining cross-sectional
area. In addition, the metallurgical data may be helpful in adjusting known theorectical
equations for net magnetization to produce more accurate estimates. As with any
research endeavor, there is a chance of failure, but nothing thus far has shown that this is
impossible.
51
References
Ali, M, Maddock, A. “Evaluation of Corrosion of Prestressing in Concrete Using Non- destructive Techniques.” GHD Pty Ltd., Sydney. 2003. Askeland, D. The Science and Engineering of Materials. Massachusetts. PWS-KENT Publishing Company. 1984. FHWA. “Corrosion Costs And Preventive Strategies in the United States.” http://www.corrosioncost.com/pdf/techbreif.pdf. March 2002. Hillemeier B, Scheel H. “Magnetic Detection of Prestressing Steel Fractures in
Prestressed Concrete.” Materials and Corrosion. 1998. Indacochea, J, Rumiche, F, Wang, M. “Assessment of the Effect of Microstructure on
the Magnetic Behavior of Structural Carbon Steels Using an Electromagnetic Sensor.” Journal of Materials Engineering and Performance. September 2007.
Nims, D. “Nondestructive Inspection of Deteriorated Prestressing Tendons in Concrete
Bridges.” The University of Toledo. March 2008. Devabhaktuni, V, Nims, D. “Magnetic Sensor for Nondestructive Evaluation of
Deteriorated Prestressing Strand.” The University of Toledo. December 2008.
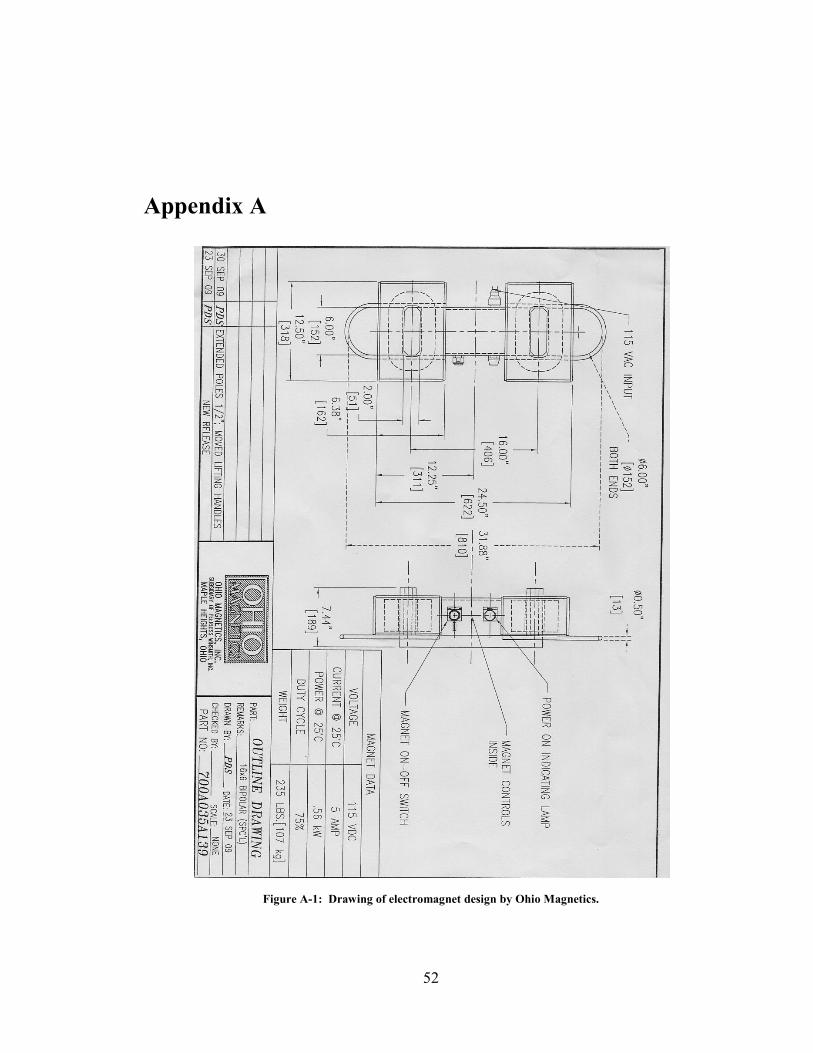
52
Appendix A
Figure A-1: Drawing of electromagnet design by Ohio Magnetics.
Copyright © 2022 FDOKUMEN