Modeling tree crown dynamics with 3D partial differential equations
Upload
edithcowanCategory
view
0download
0
120
Chapter 7. Partial Differential Equations (PDEs) Relevant Computer Lab Exercise is attached to the end of this Chapter, p. 130
Here we deal with differential equations where the dependent variable is a function of two or more
independent variables. If the former is u, say, and the latter are x and y, the general form is
0,,,,2
22
2
2
y
u
x
uuyxD
y
uC
yx
uB
x
uA
(7.1)
where the coefficients A, B, C and D may be constant or may depend on x, y and u. Eqn (7.1) is
classified according to:
B2 - 4AC < 0 the equation is “elliptic”
B2 = 4AC the equation is “parabolic”
B2 - 4AC > 0 the equation is “hyperbolic”
As we shall see the nature of a particular equation can have a strong influence on its method of
numerical solution. Usually these equations have to be solved over regions in space with the
appropriate boundary conditions. Thus they are fundamentally different from the ODE problems that
we have been looking at in Chapter 5.
7.1 Examples of PDEs
(i) The one-dimensional time (t) dependent heat equation for the temperature T,
x
Tk
xt
TpC
where is the density, CP the heat capacity, and k the thermal conductivity. This is called the
unsteady heat conduction (Fourier’s) equation in one spatial dimension (x). If k is constant
02
2
x
T
pC
k
t
T
(7.2)
Thus A = k/CP, B = C = 0, and D = T/ t. Therefore B2 = 4AC and the equation is parabolic.
(ii) 02
2
2
2
yx
or 0 2
where is usually a potential function. This is Laplace’s equation, the most common PDE in
engineering. B = 0 and A = C = 1 so the equation is elliptic.
(iii) 2
In fluid mechanics: is the stream function and is the vorticity
In electrostatics: is the electric potential, is the charge density or dielectric constant

121
In elasticity: = z, is related to angle of twist of a cylinder in torsion
This is Poisson’s equation, which must also be elliptic as - is D in Eqn (7.1).
(iv) 2
2
2
2
x
y
W
Tg
t
y
where now T denotes tension in a stretched string, W is the mass per unit length and y is the
displacement. g is the acceleration due to gravity. This hyperbolic equation models a vibrating string
held rigidly at both ends.
7.2 Method of Numerical Solution Using Finite Differences
Consider the simplest case where the region over which the equation is to be solved is a rectangle.
The region is divided into a mesh as shown; in this case a square mesh is used. The grid lines are
numbered in each direction, say from 1 to n in the x-direction and 1 to m in the y-direction.
Nodal points or nodes lie at the intersection of mesh lines. These are the points at which the finite
difference approximations to the PDEs are to be set up and solved.
The next step is to formulate the finite difference equation. Again we start with a Taylor series
expansion at xj; in this case Eqn (5.2) rather than the two-variable form of (5.3) because we are taking
derivatives at constant y. In the most suitable form:
....24
1
6
1
2
1
4
1
3
2
hfhxf
hxfhxfxfhxf
iv
j
jjjj
where, by the mean value theorem, xj < 1 < xj + h. Similarly
....24
1
6
1
2
1
4
2
3
2
hfhxf
hxfhxfxfhxf
iv
j
jjjj
where xj - h < 2 < xj.
y
x
(i, j) th node
h
1 2 i n
h
1
2
j
m
122
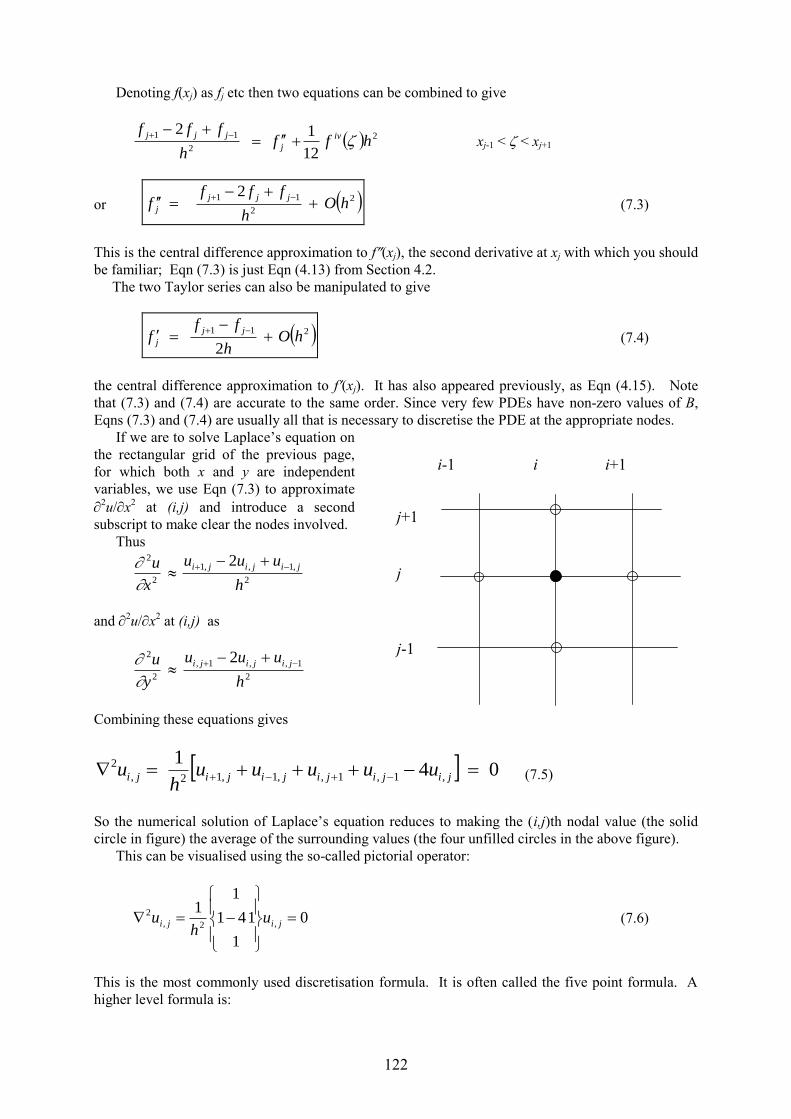
i-1 i i+1
Denoting f(xj) as fj etc then two equations can be combined to give
2
2
11
12
12hff
h
fffiv
j
jjj
xj-1 < < xj+1
or 2
2
11 2hO
h
ffff
jjj
j
(7.3)
This is the central difference approximation to f(xj), the second derivative at xj with which you should
be familiar; Eqn (7.3) is just Eqn (4.13) from Section 4.2.
The two Taylor series can also be manipulated to give
211
2hO
h
fff
jj
j
(7.4)
the central difference approximation to f(xj). It has also appeared previously, as Eqn (4.15). Note
that (7.3) and (7.4) are accurate to the same order. Since very few PDEs have non-zero values of B,
Eqns (7.3) and (7.4) are usually all that is necessary to discretise the PDE at the appropriate nodes.
If we are to solve Laplace’s equation on
the rectangular grid of the previous page,
for which both x and y are independent
variables, we use Eqn (7.3) to approximate
2u/x
2 at (i,j) and introduce a second
subscript to make clear the nodes involved.
Thus
2
,1,,1
2
2 2
h
uuu
x
u jijiji
and 2u/x
2 at (i,j) as
2
1,,1,
2
2 2
h
uuu
y
u jijiji
Combining these equations gives
041
,1,1,,1,12,
2 jijijijijiji uuuuuh
u (7.5)
So the numerical solution of Laplace’s equation reduces to making the (i,j)th nodal value (the solid
circle in figure) the average of the surrounding values (the four unfilled circles in the above figure).
This can be visualised using the so-called pictorial operator:
01
1
4
1
11
,2,
2
jiji uh
u (7.6)
This is the most commonly used discretisation formula. It is often called the five point formula. A
higher level formula is:
j+1
j
j-1

123
0
141
4204
141
6
1,2,
2
jiji uh
u (7.7)
which has O(h6) error. We consider the implementation of these formulae by way of a simple
example with a small number of nodes and then discuss the more general case of a large number of
nodes.
7.3 Laplace’s Equation in a Rectangular Region
Example 7.1
A thin 10 x 20 cm plate has one of
its 10 cm edges held at 100°C
while the other edges are at 0°C.
The steady state temperature (T) is
described by
02
2
2
2
y
T
x
T
The simplest possible
discretisation is to use h = 5 cm
and have the three nodes as shown
in the figure below. We don’t have
to write the equations for nodes on
the boundary because we know
their temperature from the
boundary conditions. Note also that h2 does not appear in the final set of equations; it is simply
multiplied through. Using the sketch below, it is easy to apply the pictorial operator to node 1 to give
T2 + 0 + 0 + 0 - 4T1 = 0 (7.8a)
and
T3 + T1 + 0 + 0 - 4T2 = 0 (7.8b)
for node 2 and
100 + T2 + 0 + 0 - 4T3 = 0 (7.8c)
for node 3.
0 0
0 0 0
0
0 T1 T2 T3
100
T = 0C
T = 0C T = 100C
T = 0C y
x

124
Thus the numerical approximation to the PDE has resulted in a set of linear equations to be
solved. This is the common outcome of such methods.
The solutions are:
T1 = 1.786 C, T2 = 7.143 C, T3 = 26.786 C
which, as can be seen by comparison with the exact solutions whose determination does not concern
us,
T1,exact = 1.094 C, T2,exact = 5.489 C, T3.exact = 26.094 C
are remarkably accurate.
7.4 Methods for Large Number of Nodes
If we consider the Eqn (7.8) for three nodes and write them in a form similar to Jacobi iteration. Here
we get the (k+1)th iteration from the kth:
42
1
1
kk TT (7.9a)
431
1
2
kkk TTT (7.9b)
41002
1
3 kk TT (7.9c)
we have an example of Liebmann’s method. If we had used 1
1
kT in (7.9b) and 1
2
kT in (7.9c) we
would have the equivalent of Gauss-Seidel iteration.
In general, if u is the dependent variable then iteration is simply
4
1,1,,1,11
,
k
ji
k
ji
k
ji
k
jik
ji
uuuuu
(7.10)
for the Jacobi iteration, or
4
1
1,1,
1
,1,11
,
k
ji
k
ji
k
ji
k
jik
ji
uuuuu (7.11)
for the more rapidly converging Gauss-Seidel iteration. Eqn (7.10) can be written as
4
4 ,
1
1,1,
1
,1,1
,
1
,
k
ji
k
ji
k
ji
k
ji
k
jik
ji
k
ji
uuuuuuu (7.12)
where the bracketed term [] can be called a residual because
[ ] 0 as k
In some cases, convergence can be accelerated by rewriting (7.12) as
....,
1
, k
ji
k
ji uu (7.13)
is the “over relaxation factor” and its use is called “successive over relaxation” or SOR. Again
there is a strong analogy with the solution of linear equations: SOR in that case is described in Section
6.3 of these Notes.
125
The difference between (7.12) and (7.13) looks simple and appealing but in practice it is often
impossible to determine an optimum value of. In fact, some values of give poorer convergence
than = 1 used in Eqn (7.7). In mathematical terms, the determination of optimum is an
“eigenvalue” problem. In most cases 1 .
Note that there has been a further innovation in notation in this Section: the superscripts (k) and (k+1)
denote iteration number while the subscripts denote node number or position in space. To emphasise
the difference, the iteration number is parenthesised. The techniques for solving Eqns (7.10) to (7.13)
are those described in Chapters 2 and 6 where the iteration number is not parenthesised and there is
only one subscript on the dependent variable.
There are at least two ways that the methods of Chapters 2 and 6 can be applied in the present
context. Firstly, the (i,j) node numbering can be replaced by a single, (i), say, numbering as was done
in Section 7.3. The resulting system is banded and sparse and pivoting unnecessary because Eqn (7.6)
requires that the diagonal elements of the coefficient matrix have the general value of 4 and the off-
diagonal elements are unity.
The second method of solving these equations will now be described using (7.13) for the Example
7.1. The algorithm is given below. Note that,
all nodes are in the interior of the plate, so there is no need to be concerned with the corner
temperatures. In other words it does not matter whether the temperature at x = 20 cm, y = 0 is 0C
or 100C,
as in the implementation of Gauss-Seidel iteration there is no need to have a separate array for the
kth and (k+1)th iteration,
the convergence of the solution is determined by the maximum norm - see Section 2.10 - called
maxresid in the algorithm,
the temperature at all the nodes is initialised to 0C. This is not essential but is desirable.
Successive over-relaxation algorithm
In: Number of nodes in x direction, imax
Number of nodes in y direction, jmax
Maximum number of iterations, max
Convergence tolerance,
over relaxation factor,
Out: T(imax, jmax) the approximate steady state temperature
comment: use zeroth elements of T to contain boundary conditions
comment: initialise all other elements of T to zero
loop i = 1, imax +2
loop j = 1, jmax +2
T(i, j) = 0.0
end loop
end loop
loop j = 1, jmax + 2
T(imax+2, j) = 100.0
end loop
loop k = 1, max
maxresid = 0.0
loop i = 2, imax +1
loop j = 2, jmax +1
resid = [T(i+1,j) + T(i-1,j) + T(i,j+1) + T(i,j-1)]/4 - T(i,j)
if |resid| > maxresid then
maxresid = resid
endif
T(i,j) = T(i,j) + resid

126
end loop
end loop
if |maxresid| < then
exit with solution in T
endif
end loop
error: maximum number of iterations exceeded
Algorithm 7.1 Successive Over relaxation for Example 7.1
Example 7.2 Iterative solution of Example 7.1
The algorithm was programmed and used to investigate the effect of varying h on the accuracy of the
temperatures T1, T2, and T3 that were determined explicitly in Example 7.1. The results for a tolerance
of 10-5
are summarised in the following table. The results for h = 5 cm agree with the previously
determined direct solution to three decimal places. The errors, etc, are the difference between the
computed and exact temperature (whose determination is not described) and so are absolute errors.
Since the numerical scheme is based on the CD approximation, it should have O(h2) accuracy. That
means, in practice, that there should be a range of h over which /h2
etc are approximately constant.
This seems to be the case for the present calculations, eve though there is a considerable difference
between, say, the level of /h2 and /h
2.
h (cm) T1 (C) (C) /h2
5 1.7857 0.6914 0.0277
2.5 1.2894 0.1951 0.0312
1.25 1.1442 0.0499 0.0319
0.625 1.1069 0.0126 0.0323
Table 7.1(a) Summary of successive-over relaxation solutions for T1.
h (cm) T2 (C) (C) /h2 T3 (C) (C) /h
2
5 7.1429 1.6544 0.0662 26.7857 0.6913 0.0277
2.5 6.0194 0.5309 0.0849 26.2894 0.1950 0.0312
1.25 5.6317 0.1432 0.0916 26.1442 0.0500 0.0320
0.625 5.5250 0.0365 0.0934 26.1069 0.0125 0.0320
Table 7.1(b) Summary of successive-over relaxation solutions for T2 and T3.
h (cm) imax jmax opt no. iterations
5 3 1 1.1 7
2.5 7 3 1.3 14
1.25 15 7 1.6 30
0.625 31 15 1.7 79
Table 7.2 Optimum over relaxation factor and number of iterations.
To give an idea of the way in which opt, the optimum , and the number of iterations required for
convergence varies with the number of equations, a numerical search was undertaken for the three
values of h. The results are given in Table 7.2.
7.5 Boundary Conditions
If u is known along the boundary, as in our example, the problem is said to have Dirichlet
conditions. This is usually the easiest case to solve. If instead, the normal derivative is known along

127
the boundary then we have Neumann conditions. Often the normal derivative is related to a flux of
some physically important quantity, such as the heat transfer rate into a region.
Derivative boundary conditions are usually harder to deal with and often require the extension of
the grid to include fictitious points outside the region. The reason for using fictitious points comes
from the following consideration. If we are solving Laplace’s equation for u, say, in a region as
shown in the sketch below, where the bc is a value of u/y at the point (i,j) then we might be tempted
to discretise this as
h
uu
y
u jijiji 1,,,
but as we have seen this discretisation is only O(h) whereas the rest of approximation is O(h2) if CDs
are used. One remedy is to extend the grid to one grid point outside the region and apply the central
difference formula at (i,j), which is O(h2) in accuracy.
The disadvantage of using fictitious points is that they may not be physically meaningful; for example,
u may be well defined within the region, but have no meaning outside it, and points such as (i, j+1)
must be outside the region.
7.6 Irregular Regions
Unfortunately most engineering problems do not reduce to simple rectangular regions over which the
PDE is to be solved. When a non-square mesh cannot be used, the equations become more complex
and even relatively simple geometries can be difficult to mesh.
There are basically two ways of dealing with complex geometries. The first is to force a
rectangular mesh and accept the inaccuracies or adjust the mesh at the boundary.
The second is to use numerical methods more suitable to complex geometries. These include
finite element methods, and boundary integral methods, which are described in many textbooks.
Example 7.3
This example further illustrates the way in which the central difference approximations are used to
turn a PDE into a tridiagonal system of linear equations. As is the case in most examples, the
mathematical manipulations are very straightforward.
The annular gap between two concentric cylinders is filled with a fluid. If the common length of
the cylinders is much greater than their radii (rin for the inner and rout for the outer) and the cylinders
are rotating (at in for the inner and out for the outer) then the radial velocity is zero and
circumferential velocity, W, obeys the equation
01
22
2
r
W
r
W
rr
W
(7.14)
where r is the radius. (Because W does not depend on the circumferential co-ordinate, Eqn (7.14) is,
strictly, a total differential equation. This simplifies, but does not fundamentally alter, the numerical
analysis.) The boundary conditions are W = inrin at r = rin and W = outrout at r = rout . We will
examine the numerical solution of this elliptic PDE by comparison to the exact solution
boundary i,j
i,j+1
i-1,j i+1,j
i,j-1 region where
Laplace’s equation
is to be solved
region where
Laplace’s equation
is to be solved
y

128
22
22
22
1)(ˆ
outin
outoutinin
outin
outin
rr
rrr
rrrrW (7.15)
If the annulus is divided radially into N interior points equally spaced h apart, where h = (rout -
rin)/(N+1), the central difference approximations for the first and second derivatives (Eqns 7.4 and
7.5) give for the ith point:
02
22
11
2
11
i
i
i
iiiii
r
W
hr
WW
h
WWW (7.16)
which can be simply rearranged as
011 iiiiii WlWdWu (7.17a)
for every i, which shows that applying the FD approximation has resulted in a tridiagonal system of
equations for the unknown Ws. To see the tridiagonality in another way, consider for example, N =
50, and i = 25; then the equation for W25 involves only W26 and W24. Changing the subscripts to
arguments, the coefficients, l(i), d(i), and u(i) are:
iii rhhiu
hrid
rhhil
2
111)(and,
21)(,
2
111)(
22 (7.17b)
For all values of i apart from i = 1 and N, the right hand side, b(i), of the equation is zero. At i = 1,
W(i-1) = inrin which is known and so must be moved to the right hand side. Thus b(1) = -inrin l(1).
A similar argument applies at i = N which gives b(N) = -outrout u(N). Therefore
)(2
11)(,
)(2
11)1(
hrhh
rNb
hrhh
rb
out
outout
in
inin
otherwise b(i) = 0. (7.18)
This completes the setting up of the tridiagonal system in the form of Eqn (2.29) from Section 2.9
with the only change in notation being that W(i) not x(i) are the unknowns in the present case.
A Fortran program was written to solve the tridiagonal equations using the Algorithms 2.5 and 2.6.
Two cases were considered:
Case 1: rin = 1.0 m, rout = 1.1 m, in = 1 rad/sec, and out = 3.636 rad/sec.
Case 2: rin = 0.01 m, rout = 0.5 m, in = 100 rad/sec, and out = 8 rad/sec.
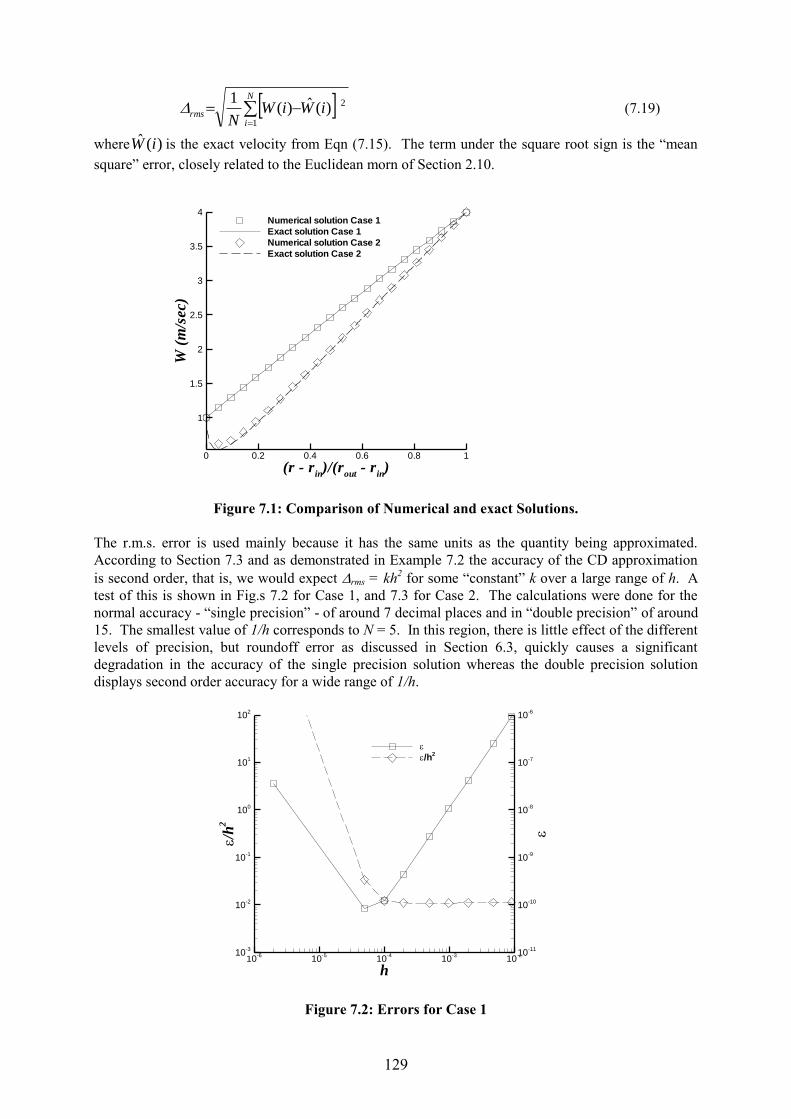
For these two cases, W is the same at each boundary: 1 m/sec at the inner surface and 4 m/sec at the
outer surface. Figure 7.1 shows the exact solution for both cases along with the numerical solutions
for N = 20. For Case 1, W is nearly linear in r so it is not surprising that the numerical solution is
more accurate. It is worth noting from the derivation of the CD formulae, that if W were linear or
quadratic in r, then the errors in the CD approximations, which involve third and higher derivatives,
would be zero. For Case 2, the velocity distribution is more complicated near the inner cylinder and
there the numerical solution is least accurate.
A way to formalise the level of error is to extend the use of “norms” that were introduced in
Section 2.10. A particularly useful measure is the “root mean square” error, rms, defined by
129
h
/h
2
10-6
10-5
10-4
10-3
10-210
-3
10-2
10-1
100
101
102
10-11
10-10
10-9
10-8
10-7
10-6
/h2
N
irms iWiW
N 1
2)(ˆ)(1
(7.19)
where )(ˆ iW is the exact velocity from Eqn (7.15). The term under the square root sign is the “mean
square” error, closely related to the Euclidean morn of Section 2.10.
Figure 7.1: Comparison of Numerical and exact Solutions.
The r.m.s. error is used mainly because it has the same units as the quantity being approximated.
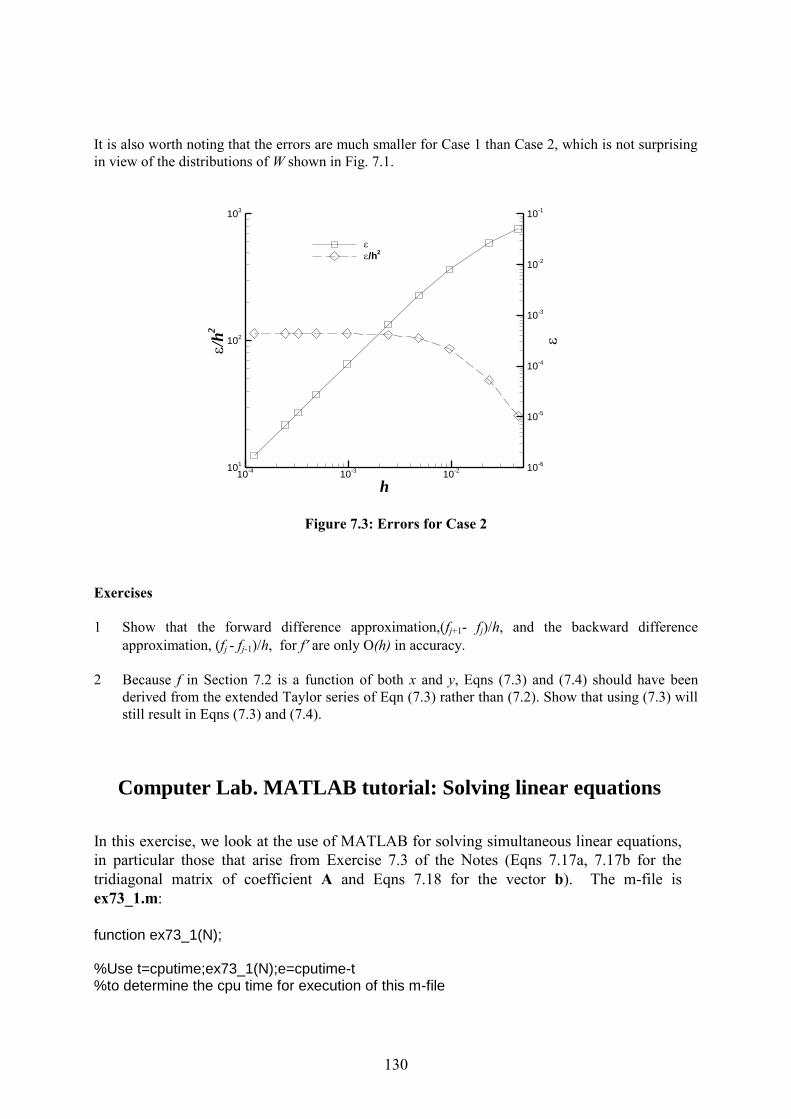
According to Section 7.3 and as demonstrated in Example 7.2 the accuracy of the CD approximation
is second order, that is, we would expect rms = kh2 for some “constant” k over a large range of h. A
test of this is shown in Fig.s 7.2 for Case 1, and 7.3 for Case 2. The calculations were done for the
normal accuracy - “single precision” - of around 7 decimal places and in “double precision” of around
15. The smallest value of 1/h corresponds to N = 5. In this region, there is little effect of the different
levels of precision, but roundoff error as discussed in Section 6.3, quickly causes a significant
degradation in the accuracy of the single precision solution whereas the double precision solution
displays second order accuracy for a wide range of 1/h.
Figure 7.2: Errors for Case 1
(r - rin)/(r
out- r
in)
W(m
/sec)
0 0.2 0.4 0.6 0.8 1
1
1.5
2
2.5
3
3.5
4Numerical solution Case 1
Exact solution Case 1
Numerical solution Case 2
Exact solution Case 2
130
h
/h
2
10-4
10-3
10-210
1
102
103
10-6
10-5
10-4
10-3
10-2
10-1
/h2
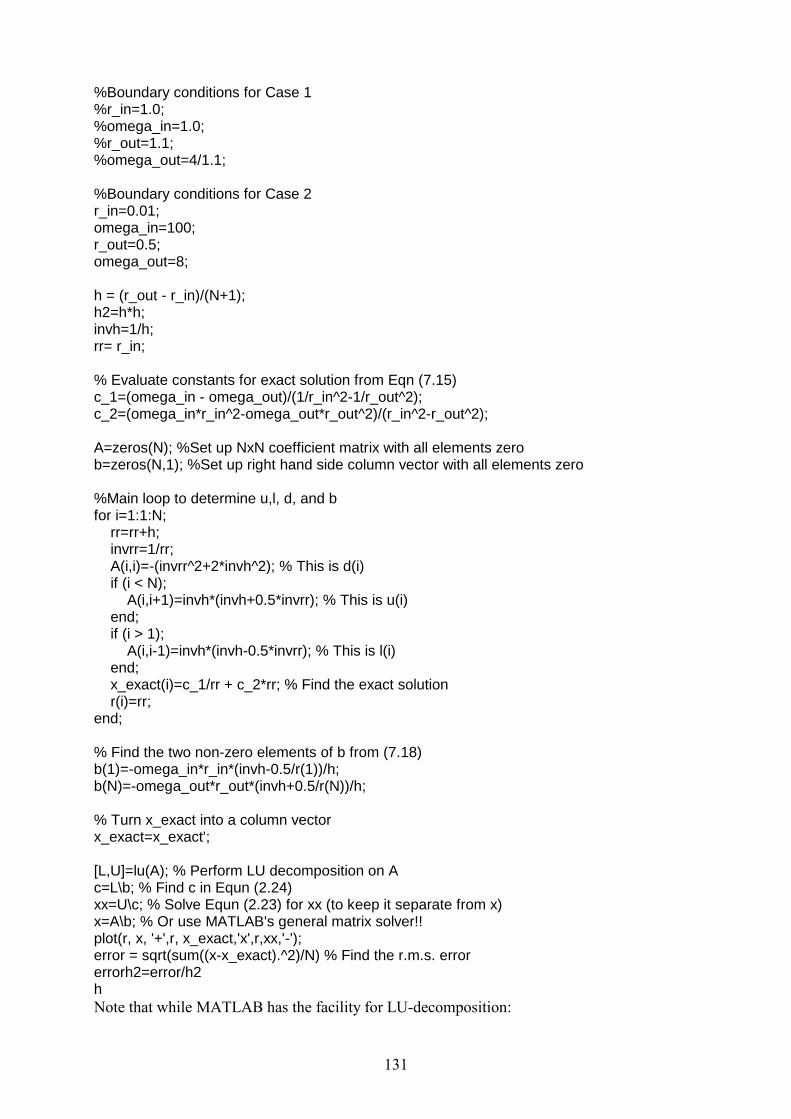
It is also worth noting that the errors are much smaller for Case 1 than Case 2, which is not surprising
in view of the distributions of W shown in Fig. 7.1.
Figure 7.3: Errors for Case 2
Exercises
1 Show that the forward difference approximation,(fj+1- fj)/h, and the backward difference
approximation, (fj - fj-1)/h, for f are only O(h) in accuracy.
2 Because f in Section 7.2 is a function of both x and y, Eqns (7.3) and (7.4) should have been
derived from the extended Taylor series of Eqn (7.3) rather than (7.2). Show that using (7.3) will
still result in Eqns (7.3) and (7.4).
Computer Lab. MATLAB tutorial: Solving linear equations
In this exercise, we look at the use of MATLAB for solving simultaneous linear equations,
in particular those that arise from Exercise 7.3 of the Notes (Eqns 7.17a, 7.17b for the
tridiagonal matrix of coefficient A and Eqns 7.18 for the vector b). The m-file is
ex73_1.m:
function ex73_1(N); %Use t=cputime;ex73_1(N);e=cputime-t %to determine the cpu time for execution of this m-file
131
%Boundary conditions for Case 1 %r_in=1.0; %omega_in=1.0; %r_out=1.1; %omega_out=4/1.1; %Boundary conditions for Case 2 r_in=0.01; omega_in=100; r_out=0.5; omega_out=8; h = (r_out - r_in)/(N+1); h2=h*h; invh=1/h; rr= r_in; % Evaluate constants for exact solution from Eqn (7.15) c_1=(omega_in - omega_out)/(1/r_in^2-1/r_out^2); c_2=(omega_in*r_in^2-omega_out*r_out^2)/(r_in^2-r_out^2); A=zeros(N); %Set up NxN coefficient matrix with all elements zero b=zeros(N,1); %Set up right hand side column vector with all elements zero %Main loop to determine u,l, d, and b for i=1:1:N; rr=rr+h; invrr=1/rr; A(i,i)=-(invrr^2+2*invh^2); % This is d(i) if (i < N); A(i,i+1)=invh*(invh+0.5*invrr); % This is u(i) end; if (i > 1); A(i,i-1)=invh*(invh-0.5*invrr); % This is l(i) end; x_exact(i)=c_1/rr + c_2*rr; % Find the exact solution r(i)=rr; end; % Find the two non-zero elements of b from (7.18) b(1)=-omega_in*r_in*(invh-0.5/r(1))/h; b(N)=-omega_out*r_out*(invh+0.5/r(N))/h; % Turn x_exact into a column vector x_exact=x_exact'; [L,U]=lu(A); % Perform LU decomposition on A c=L\b; % Find c in Equn (2.24) xx=U\c; % Solve Equn (2.23) for xx (to keep it separate from x) x=A\b; % Or use MATLAB's general matrix solver!! plot(r, x, '+',r, x_exact,'x',r,xx,'-'); error = sqrt(sum((x-x_exact).^2)/N) % Find the r.m.s. error errorh2=error/h2 h
Note that while MATLAB has the facility for LU-decomposition:
132
[L,U]=lu(A); % Perform LU decomposition on A
it cannot, apparently, deal with the particular case of tridiagonal systems for which there
should be no need to establish the full coefficient matrix A.
On the other hand, MATLAB easily deals with solving simultaneous equations using
“backslash” division as indicated by “\” rather than “/”:
c=L\b; % Find c in Equn (2.24) xx=U\c; % Solve Equn (2.23) for xx (to keep it separate from x) x=A\b; % Or use Matlab's general matrix solver!!
where all divisions are “backslash”, in other words, for the first line, L and b are known so
the backslash division finds c such that Lc = b. Note that these three lines actually solve
the equations twice, the first exploiting MATLAB’s LU decomposition features and the
second by numerical brute force. These matrix manipulations are a very powerful feature of
MATLAB.
After the equations are solved, the results are plotted and the r.m.s. error of the numerical
solution determined by comparison to the exact solution. Note haw the error is found using
term-by-term exponentiation of the vectors x and x_exact.
This m-file is executed by typing the command:
>> ex73_1(50)
for N = 50. Alternatively, to find out how much cpu time is required to solve the
equations:
>>t = cputime; ex73_1(50); e=cputime-t
Exercises (a) Use MATLAB to solve Equation (2.19) from the Notes:
1
2
3
3 1 2 12
1 2 3 11
2 2 1 2
x
x
x
by first constructing the matrix
>>A = [3 -1 2; 1 2 3; 2 - 2 -1]
etc and then performing a LU decomposition. Find L and U and compare with Equations
(2.20) and (2.21). Find x.
(b) Run ex73_1.m for a range of N (and hence h) comparable to that shown in Figure 7.1 for
both cases and verify the results in that figure.
133
(c) Determine the cpu time required to run the m-file for a range of N. For each N you should
execute the m-file several times and find the average time.
(d) Determine whether it is more efficient computationally to solve the equations using LU-
decomposition or not. In other words, is it quicker to calculate xx or x? This will require
modifications to the m-file to first of all find xx only, and then x only. What do you conclude
from these results?
Copyright © 2022 FDOKUMEN