GETARAN MEKANIS 19 - finahari.files.wordpress.com posisi – waktu tampak sebagai kurva sinus...
46
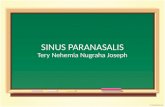
GETARAN MEKANIS 19 Sistem mekanis mungkin mengalami getaran bebas atau bisa juga menjadi subyek dari getaran paksa. Suatu getaran dikatakan ‘teredam’ jika gaya gesek terjadi dan ‘tidak teredam’ jika hal sebaliknya terjadi. Sistem suspensi truk secara esensial terdiri atas pegas-pegas dan ‘shock absorber’ yang menyebabkan bodi truk mengalami getaran paksa ‘teredam’ pada saat roda-rodanya dikenai gaya-gaya periodik pada sistem uji dinamis kendaraan sebagaimana tampak pada gambar.
Transcript of GETARAN MEKANIS 19 - finahari.files.wordpress.com posisi – waktu tampak sebagai kurva sinus...

GETARAN MEKANIS 19
Sistem mekanis mungkin mengalami getaran bebas atau bisa juga menjadi
subyek dari getaran paksa. Suatu getaran dikatakan ‘teredam’ jika gaya gesek terjadi dan ‘tidak teredam’ jika hal sebaliknya terjadi. Sistem suspensi truk secara esensial terdiri atas pegas-pegas dan ‘shock absorber’ yang menyebabkan bodi truk mengalami getaran paksa ‘teredam’ pada saat roda-rodanya dikenai gaya-gaya periodik pada sistem uji dinamis kendaraan sebagaimana tampak pada gambar.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 2
GETARAN MEKANIS
19.1. Pendahuluan
Getaran Tanpa Redaman
19.2. Getaran Bebas Partikel
Gerak Harmonis Sederhana
19.3. Pendulum Sederhana (Penyelesaian Pendekatan)
19.4. Pendulum Sederhana (Penyelesaian Eksak)
19.5. Getaran Bebas Benda Kaku
19.6. Penerapan Prinsip Konservasi Energi
19.7. Getaran Paksa
Getaran Teredam
19.8. Getaran Bebas Teredam
19.9. Getaran Paksa Teredam
19.10. Analogi Elektrik
19.1. PENDAHULUAN
Getaran mekanis adalah gerak partikel atau bodi yang berosilasi di sekitar posisi
keseimbangan. Pada umumnya getaran pada mesin dan struktur tidak diinginkan terjadi
karena adanya peningkatan tegangan dan hilangnya energi sebagai akibatnya. Itulah
sebabnya maka getaran harus dihilangkan atau dikurangi sejauh mungkin melalui desain
yang tersedia. Analisa getaran menjadi semakin penting pada tahun-tahun terakhir
sejalan dengan tren masa kini yang mengarah pada mesin berkecepatan tinggi dan
struktur yang semakin ringan. Terdapat beberapa alasan untuk dapat berharap bahwa
tren tersebut akan berlanjut dan bahwa kebutuhan akan analisa getaran semakin besar di
masa yang akan datang.
Analisa getaran adalah subyek kajian yang sangat luas yang akan dibahas dalam
seluruh bab. Pembahasan awal kita akan dibatasi pada tipe-tipe getaran yang lebih
sederhana, yaitu getaran dari bodi atau sistem bodi dengan satu derajat kebebasan.
Getaran mekanis umumnya terjadi pada saat suatu sistem dilepas dari posisi
keseimbangan stabil. Sistem ini cenderung kembali pada posisi dibawah pembebanan
gaya-gaya potensial (bisa berupa gaya elastik atau gaya gravitasi untuk pendulum).
Namun umumnya sistem tersebut mencapai posisi orisinilnya dengan kecepatan tertentu
yang terjadi pada saat dilepas dari posisi dibawah keseimbangan. Selama proses
tersebut berlangsung terus tanpa batas, sistem tersebut terus bergerak bolak-balik

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 3
melalui posisi keseimbangan. Interval waktu yang dibutuhkan sistem untuk
menyelesaikan satu siklus gerak dinamakan frekuensi, dan pergeseran maksimum sistem
dari posisi keseimbangan dinamakan amplitudo getaran.
Jika gerakan yang terjadi hanya diakibatkan oleh gaya-gaya potensial saja,
getaran yang terjadi disebut getaran bebas (subbab 19.2 - 19.6). Jika satu gaya periodik
dikenakan pada sistem, gerakan yang terjadi disebut getaran paksa (subbab 19.7). Jika
efek gesekan dapat diabaikan, getaran dikatakan tidak teredam. Bagaimanapun
sebenarnya semua getaran adalah teredam dalam beberapa derajat. Jika getaran bebas
teredam sangat tipis, amplitudonya akan berkurang perlahan-lahan hingga, setelah
beberapa waktu tertentu, gerakannya berhenti. Tetapi jika redamannya cukup besar untuk
menahan getaran sesungguhnya, sistem tersebut kemudian secara perlahan dapat
mencapai posisi orisinilnya (subbab 19.8). Getaran paksa teredam terus berlangsung
selama gaya periodik yang menghasilkan getaran tersebut terus dikenakan. Amplitudo
getaran, bagaimanapun, dipengaruhi oleh kekuatan gaya redaman (subbab 19.9).
GETARAN TANPA REDAMAN
19.2. GETARAN BEBAS DARI PARTIKEL, GERAK HARMONIS SEDERHANA
Bayangkan satu bodi dengan massa m terpasang pada pegas dengan konstanta k
(Gambar 19.1a). Selama kita hanya mengacu pada gerakan pusat massa, kita berasumsi
bodi ini adalah partikel. Jika suatu partikel berada pada keseimbangan statis, gaya-gaya
yang bekerja padanya adalah berat W dan gaya T yang ditimbulkan oleh pegas, yang
besarnya T = k . st , dimana st menyatakan regangan pegas. Jadi diperoleh W = k . st.
Tidak
teregang
Keseimbangan
st
W
stkT
Keseimbanganx
O
-xm
+xm
P
W
)( xkT st
xmma
(a) (b)
Gambar 19.1.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 4
Jika sekarang partikel ditarik sejauh xm dari posisi keseimbangan dan dilepaskan
tanpa kecepatan awal dengan anggapan bahwa xm dipilih lebih kecil dari st, partikel akan
bergerak maju dan mundur melalui titik keseimbangan; getaran dengan amplitudo xm telah
terjadi. Catat bahwa getaran juga dapat dibuat dengan memberikan kecepatan awal
tertentu pada partikel saat berada pada posisi keseimbangan x = 0, atau secara umum
memulai gerak partikel dari sembarang posisi yang ditentukan x = xo dengan kecepatan
awal vo.
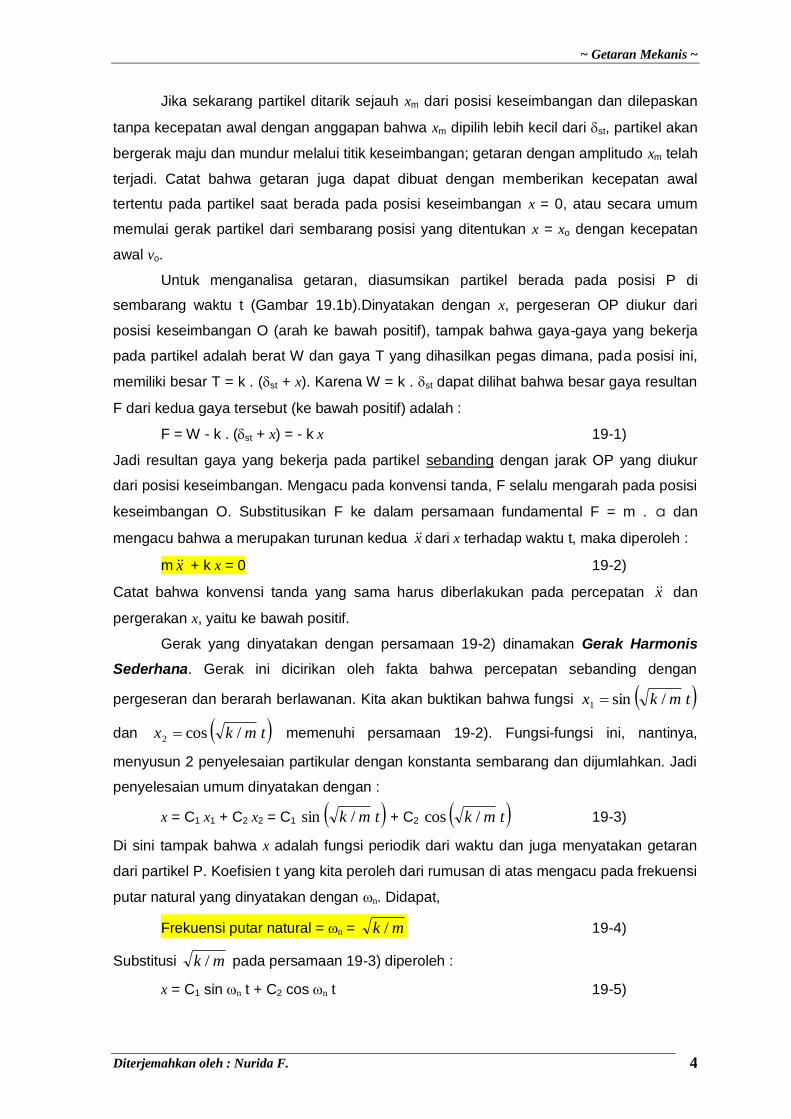
Untuk menganalisa getaran, diasumsikan partikel berada pada posisi P di
sembarang waktu t (Gambar 19.1b).Dinyatakan dengan x, pergeseran OP diukur dari
posisi keseimbangan O (arah ke bawah positif), tampak bahwa gaya-gaya yang bekerja
pada partikel adalah berat W dan gaya T yang dihasilkan pegas dimana, pada posisi ini,
memiliki besar T = k . (st + x). Karena W = k . st dapat dilihat bahwa besar gaya resultan
F dari kedua gaya tersebut (ke bawah positif) adalah :
F = W - k . (st + x) = - k x 19-1)
Jadi resultan gaya yang bekerja pada partikel sebanding dengan jarak OP yang diukur
dari posisi keseimbangan. Mengacu pada konvensi tanda, F selalu mengarah pada posisi
keseimbangan O. Substitusikan F ke dalam persamaan fundamental F = m . a dan
mengacu bahwa a merupakan turunan kedua x dari x terhadap waktu t, maka diperoleh :
m x + k x = 0 19-2)
Catat bahwa konvensi tanda yang sama harus diberlakukan pada percepatan x dan
pergerakan x, yaitu ke bawah positif.
Gerak yang dinyatakan dengan persamaan 19-2) dinamakan Gerak Harmonis
Sederhana. Gerak ini dicirikan oleh fakta bahwa percepatan sebanding dengan
pergeseran dan berarah berlawanan. Kita akan buktikan bahwa fungsi tmkx /sin1
dan tmkx /cos2 memenuhi persamaan 19-2). Fungsi-fungsi ini, nantinya,
menyusun 2 penyelesaian partikular dengan konstanta sembarang dan dijumlahkan. Jadi
penyelesaian umum dinyatakan dengan :
x = C1 x1 + C2 x2 = C1 tmk /sin + C2 tmk /cos 19-3)
Di sini tampak bahwa x adalah fungsi periodik dari waktu dan juga menyatakan getaran
dari partikel P. Koefisien t yang kita peroleh dari rumusan di atas mengacu pada frekuensi
putar natural yang dinyatakan dengan n. Didapat,
Frekuensi putar natural = n = mk / 19-4)
Substitusi mk / pada persamaan 19-3) diperoleh :
x = C1 sin n t + C2 cos n t 19-5)
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 5
Ini adalah penyelesaian umum untuk persamaan diferensial
02 xx n 19-6)
Yang dapat diperoleh dari persamaan 19-2) dengan membagi masing-masing sisi dengan
m dan menuliskan 2
nmk . Diferensiasi dua kali persamaan 19-5) terhadap t akan
diperoleh rumusan untuk kecepatan dan percepatan pada waktu t :
v = x = C1 n cos n t - C2 n sin n t 19-7)
a = x = - C1 n 2 sin n t - C2 n
2 cos n t 19-8)
Nilai dari konstanta C1 dan C2 tergantung pada kondisi awal gerakan. Sebagai contoh,
diperoleh C1 = 0 jika partikel digerakkan dari posisi keseimbangan dan dilepas pada t = 0
tanpa kecepatan awal, dan diperoleh C2 = 0 jika partikel bergerak dari O pada t = 0
dengan kecepatan awal tertentu. Secara umum, masukkan nilai t = 0 dan nilai awal xo dan
vo dari pergerakan dan kecepatan ke dalam persamaan 19-5) dan 19-7) akan diperoleh
C1 = vo / n dan C2 = xo.
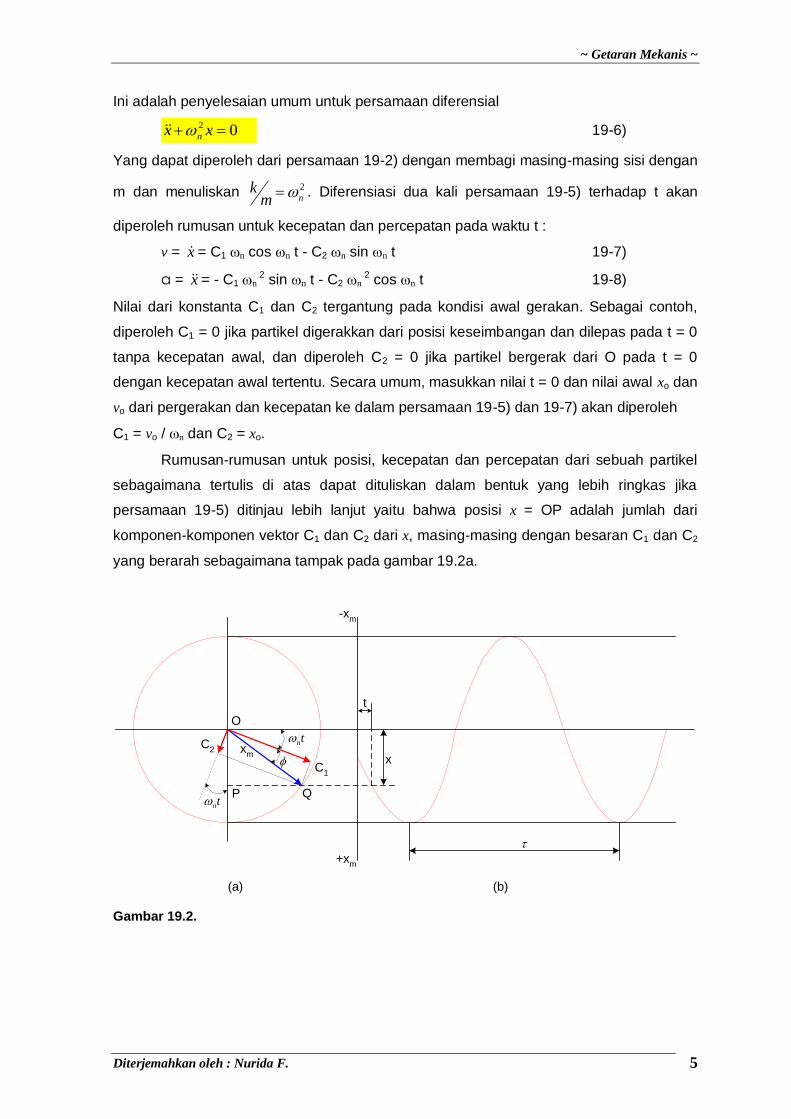
Rumusan-rumusan untuk posisi, kecepatan dan percepatan dari sebuah partikel
sebagaimana tertulis di atas dapat dituliskan dalam bentuk yang lebih ringkas jika
persamaan 19-5) ditinjau lebih lanjut yaitu bahwa posisi x = OP adalah jumlah dari
komponen-komponen vektor C1 dan C2 dari x, masing-masing dengan besaran C1 dan C2
yang berarah sebagaimana tampak pada gambar 19.2a.
O
P Q
C1
C2
tn
tnx
m
-xm
+xm
t
x
(a) (b)
Gambar 19.2.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 6
Dengan t yang bervariasi, kedua vektor tersebut berputar berlawanan arah jarum
jam, dapat dicatat juga bahwa panjang resultan vektor QO sama dengan pergeseran
maksimum xm. Gerak harmonis sederhana dari P sepanjang sumbu x dapat ditunjukkan
dengan memproyeksikan pergerakan titik Q pada sumbu tersebut yang merupakan
sebuah lingkaran berjari-jari xm dengan kecepatan putar konstan n (yang menjelaskan
istilah dari frekuensi putar natural n). Dengan menunjuk sebagai sudut yang dibentuk
oleh vektor QO dan C1 dapat dituliskan :
OP = OQ sin (n t + ) 19-9)
Yang mengarah pada rumus baru untuk posisi, kecepatan dan percepatan dari P sebagai
berikut :
x = xm sin (n t + ) 19-10)
v = x = xm n cos (n t + ) 19-11)
a = x = - xm n 2 sin (n t + ) 19-12)
Grafik posisi – waktu tampak sebagai kurva sinus (gambar 19.2b); harga maksimum xm
dari pergeseran disebut amplitudo getaran, dan sudut yang menyatakan posisi awal Q
pada lingkaran disebut sudut fase. Dapat dilihat dari gambar 19.2 bahwa siklus utuh
tercapai jika sudut n t naik hingga 2 radian. Nilai t satu siklus dinyatakan dengan n
disebut perioda getaran bebas dan diukur dalam detik. Diperoleh :
Perioda = n = 2 / n 19-13)
Jumlah siklus per satuan waktu dinyatakan dengan fn , dikenal sebagai frekuensi natural
getaran. Ditulis :
Frekuensi natural = fn = 1/n = n / 2 19-14)
Unit frekuensi adalah frekuensi 1 siklus per detik, sesuai dengan perioda 1 s. Dalam
istilah satuan dasar, satuan frekuensi adalah 1/s atau s-1. Ini disebut Hertz (Hz) dalam
sistem satuan SI. Hal ini juga sesuai dengan rumus 19-14) bahwa frekuensi 1 s-1 atau 1
Hz sesuai dengan frekuensi putar 2 rad/s. Dalam permasalahan yang melibatkan
kecepatan putar yang dinyatakan dalam revolusi per menit (rpm), didapat bahwa 1 rpm =
1
60
1 s = Hz60
1 atau 1 rpm = (2 / 60) rad/s.
Kembali kepada n yang didefinisikan rumus 19-4) dalam variabel konstanta
pegas k dan massa m dari partikel, dapat dilihat bahwa perioda dan frekuensi tidak
tergantung pada posisi awal dan amplitudo getaran. Catat bahwa n dan fn lebih
dipengaruhi oleh massa dan bukan berat partikel sehingga tidak tergantung pada nilai g.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 7
Grafik waktu – kecepatan dan waktu – percepatan dapat dinyatakan sebagai kurva
sinus dengan perioda yang sama dengan grafik waktu – posisi, tapi dengan sudut fase
yang berbeda. Dari persamaan 19-11) dan 19-12) dapat dicatat bahwa nilai maksimum
dari harga kecepatan dan percepatan adalah :
vm = xmn am = xmn2 19-15)
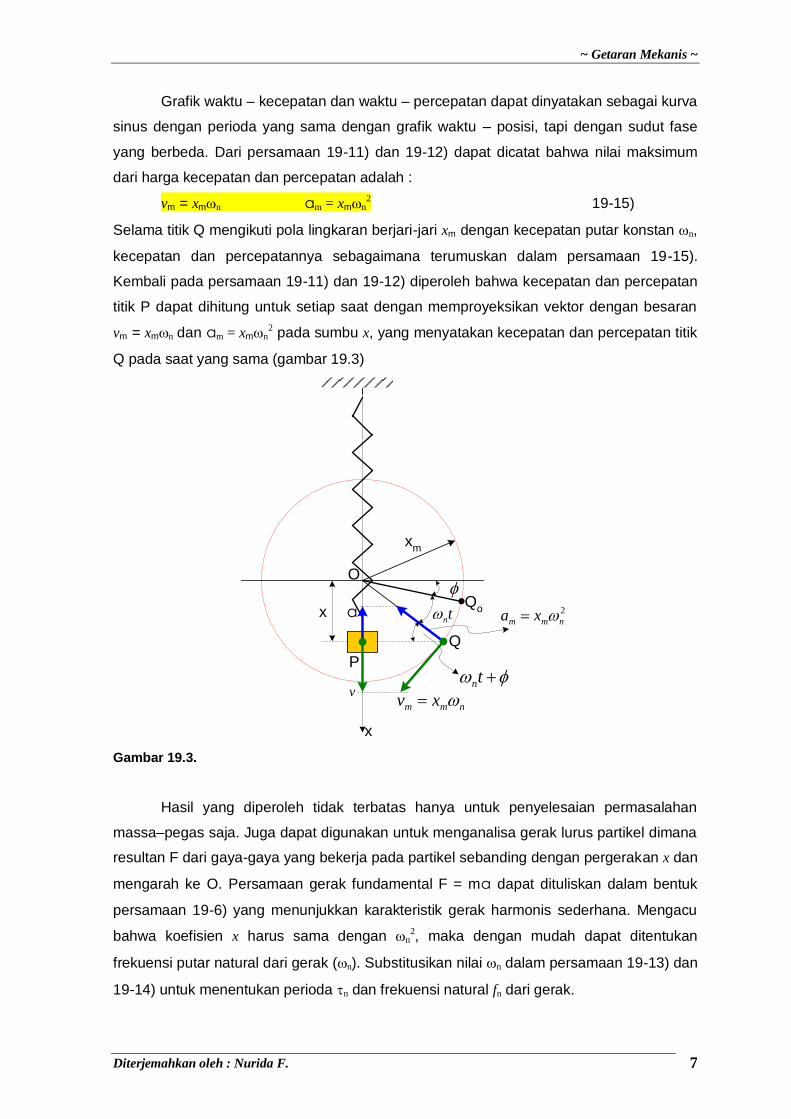
Selama titik Q mengikuti pola lingkaran berjari-jari xm dengan kecepatan putar konstan n,
kecepatan dan percepatannya sebagaimana terumuskan dalam persamaan 19-15).
Kembali pada persamaan 19-11) dan 19-12) diperoleh bahwa kecepatan dan percepatan
titik P dapat dihitung untuk setiap saat dengan memproyeksikan vektor dengan besaran
vm = xmn dan am = xmn2 pada sumbu x, yang menyatakan kecepatan dan percepatan titik
Q pada saat yang sama (gambar 19.3)
O
P
Q
tn
xm
Qo
tn
x a 2
nmm xa
nmm xv v
x
Gambar 19.3.
Hasil yang diperoleh tidak terbatas hanya untuk penyelesaian permasalahan
massa–pegas saja. Juga dapat digunakan untuk menganalisa gerak lurus partikel dimana
resultan F dari gaya-gaya yang bekerja pada partikel sebanding dengan pergerakan x dan
mengarah ke O. Persamaan gerak fundamental F = ma dapat dituliskan dalam bentuk
persamaan 19-6) yang menunjukkan karakteristik gerak harmonis sederhana. Mengacu
bahwa koefisien x harus sama dengan n2, maka dengan mudah dapat ditentukan
frekuensi putar natural dari gerak (n). Substitusikan nilai n dalam persamaan 19-13) dan
19-14) untuk menentukan perioda n dan frekuensi natural fn dari gerak.

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 8
19.3. PENDULUM SEDERHANA (PENYELESAIAN PENDEKATAN)
Pada umumnya getaran yang terjadi pada aplikasi teknis dapat dinyatakan
sebagai gerak harmonis sederhana. Kasus-kasus yang lain, meskipun berbeda tipe,
dapat didekati sebagai gerak harmonis sederhana selama amplitudo yang terjadi tetap
kecil. Misalnya, sebagai contoh sebuah pendulum sederhana, terdiri atas bola dengan
massa m tergantung pada tali dengan panjang yang dapat berosilasi pada bidang
vertikal (gambar 19.4a).
(a) (b)
m
W
T nam tam
Gambar 19.4.
Pada sembarang waktu t, tali membentuk sudut terhadap vertikal. Gaya-gaya
yang bekerja pada bola adalah berat W dan gaya T yang dihasilkan tali (gambar 19.4b).
Dengan menguraikan vektor ma menjadi komponen-komponen tangensial dan normal,
dimana mat mengarah ke kanan yaitu pada arah yang sesuai dengan pertambahan nilai
dan melihat bahwa at = = , dapat ditulis :
tt amF . ; .sin mW
Karena W = mg dan membagi persamaan dengan m akan diperoleh :
0sin
g 19-16)
Untuk osilasi amplitudo kecil, sin dan dinyatakan dalam radian maka :
0
g 19-17)
Jika dibandingkan dengan persamaan 19-16) dapat dilihat bahwa persamaan diferensial
19-17) adalah gerak harmonis sederhana dengan frekuensi putar natural n = (g/ )1/2.
Penyelesaian umum dari persamaan 19-17) dapat dinyatakan sebagai :
= m sin (nt + )
Dimana m adalah amplitudo getaran dan adalah sudut fase. Substitusikan nilai n pada
persamaan 19-13) akan diperoleh rumus perioda getaran pendulum dengan panjang :
gn
n
2
2 19-18)
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 9
*19.4. PENDULUM SEDERHANA (PENYELESAIAN EKSAK)
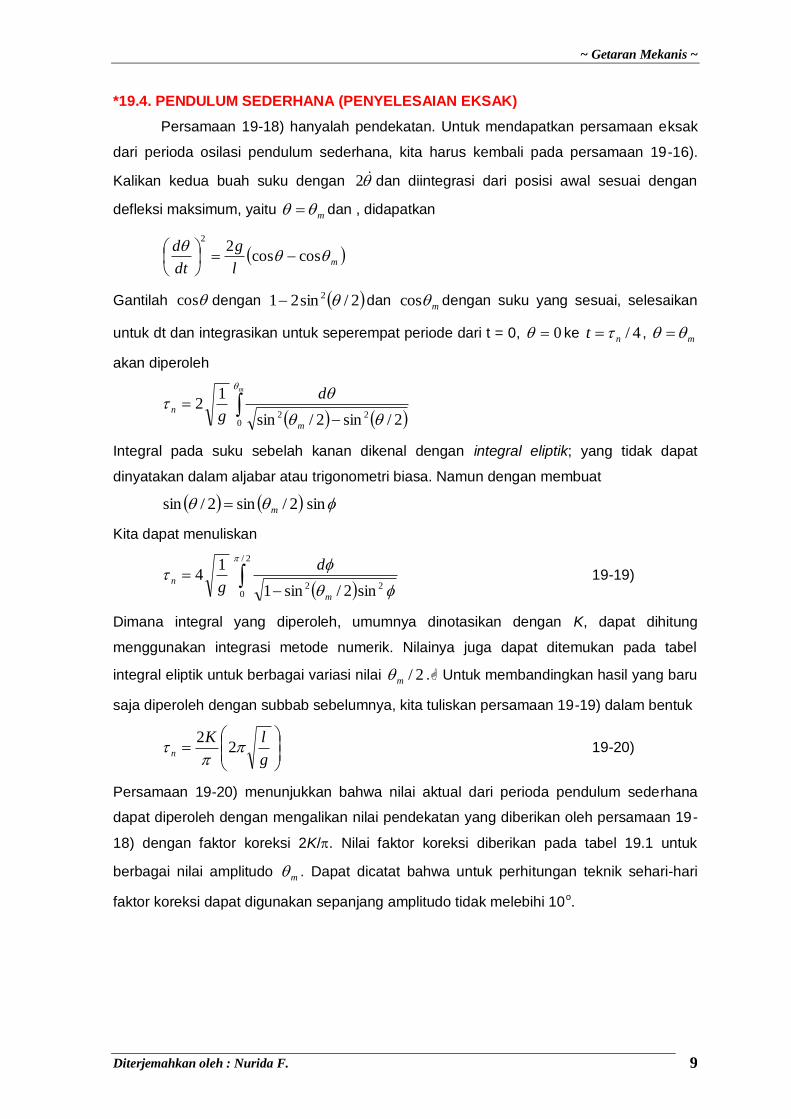
Persamaan 19-18) hanyalah pendekatan. Untuk mendapatkan persamaan eksak
dari perioda osilasi pendulum sederhana, kita harus kembali pada persamaan 19-16).
Kalikan kedua buah suku dengan 2 dan diintegrasi dari posisi awal sesuai dengan
defleksi maksimum, yaitu m dan , didapatkan
ml
g
dt
d
coscos
22
Gantilah cos dengan 2/sin21 2 dan mcos dengan suku yang sesuai, selesaikan
untuk dt dan integrasikan untuk seperempat periode dari t = 0, 0 ke 4/nt , m
akan diperoleh
m
m
n
d
g
022 2/sin2/sin
12
Integral pada suku sebelah kanan dikenal dengan integral eliptik; yang tidak dapat
dinyatakan dalam aljabar atau trigonometri biasa. Namun dengan membuat
sin2/sin2/sin m
Kita dapat menuliskan
2/
022 sin2/sin1
14
m
n
d
g 19-19)
Dimana integral yang diperoleh, umumnya dinotasikan dengan K, dapat dihitung
menggunakan integrasi metode numerik. Nilainya juga dapat ditemukan pada tabel
integral eliptik untuk berbagai variasi nilai 2/m . Untuk membandingkan hasil yang baru
saja diperoleh dengan subbab sebelumnya, kita tuliskan persamaan 19-19) dalam bentuk
g
lKn
2
2 19-20)
Persamaan 19-20) menunjukkan bahwa nilai aktual dari perioda pendulum sederhana
dapat diperoleh dengan mengalikan nilai pendekatan yang diberikan oleh persamaan 19-
18) dengan faktor koreksi 2K/. Nilai faktor koreksi diberikan pada tabel 19.1 untuk
berbagai nilai amplitudo m . Dapat dicatat bahwa untuk perhitungan teknik sehari-hari
faktor koreksi dapat digunakan sepanjang amplitudo tidak melebihi 10o.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 10
Tabel 19.1. Faktor koreksi untuk perioda pendulum sederhana
m 0o 10o 20o 30o 60o 90o 120o 150o 180o
K 1.571 1.574 1.563 1.598 1.686 1.854 2.157 2.768
2K/ 1.000 1.002 1.008 1.017 1.073 1.180 1.373 1.762
Lihat, sebagai contoh, Tabel Matematika Standar, Chemical Rubber Publishing Company, Cleveland, Ohio
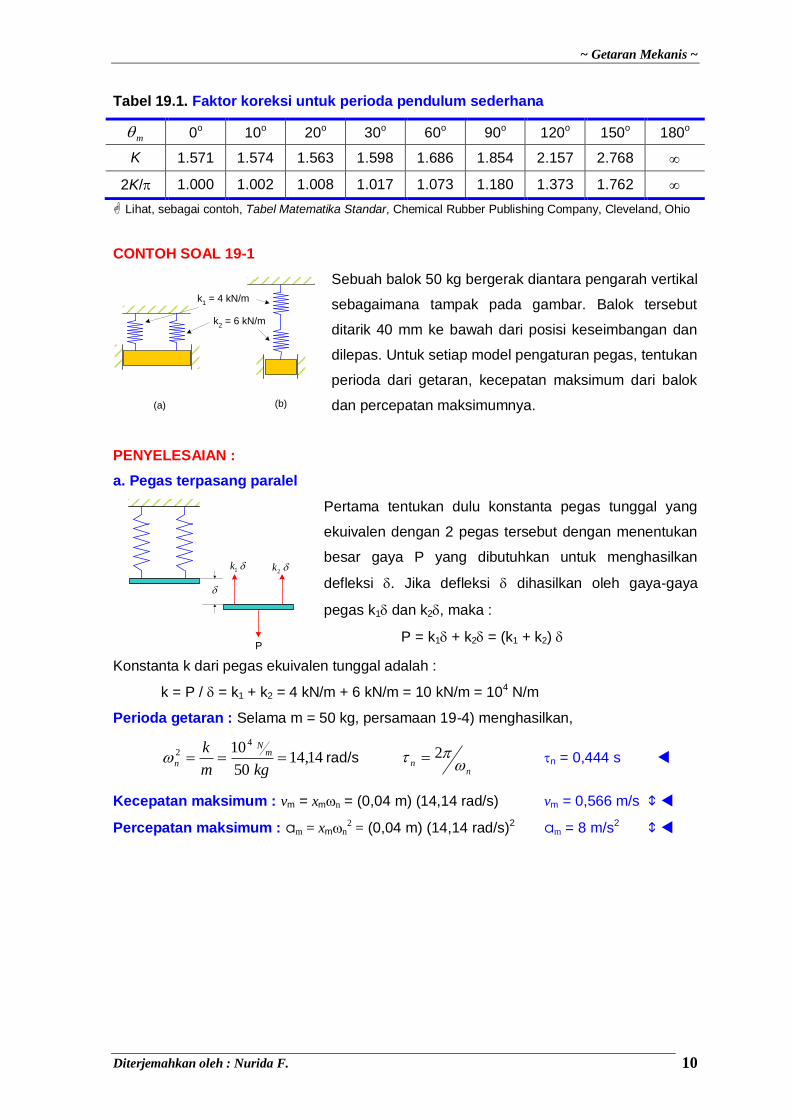
CONTOH SOAL 19-1
k1 = 4 kN/m
k2 = 6 kN/m
(a) (b)
Sebuah balok 50 kg bergerak diantara pengarah vertikal
sebagaimana tampak pada gambar. Balok tersebut
ditarik 40 mm ke bawah dari posisi keseimbangan dan
dilepas. Untuk setiap model pengaturan pegas, tentukan
perioda dari getaran, kecepatan maksimum dari balok
dan percepatan maksimumnya.
PENYELESAIAN :
a. Pegas terpasang paralel
1k 2k
P
Pertama tentukan dulu konstanta pegas tunggal yang
ekuivalen dengan 2 pegas tersebut dengan menentukan
besar gaya P yang dibutuhkan untuk menghasilkan
defleksi . Jika defleksi dihasilkan oleh gaya-gaya
pegas k1 dan k2, maka :
P = k1 + k2 = (k1 + k2)
Konstanta k dari pegas ekuivalen tunggal adalah :
k = P / = k1 + k2 = 4 kN/m + 6 kN/m = 10 kN/m = 104 N/m
Perioda getaran : Selama m = 50 kg, persamaan 19-4) menghasilkan,
14,1450
10 42
kgm
k mN
n rad/s n
n 2 n = 0,444 s
Kecepatan maksimum : vm = xmn = (0,04 m) (14,14 rad/s) vm = 0,566 m/s
Percepatan maksimum : am = xmn2 = (0,04 m) (14,14 rad/s)2 am = 8 m/s2

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 11
b. Pegas terpasang seri
1l
2l
11 l
22 l
P
Pertama tentukan dulu konstanta pegas tunggal yang ekuivalen
dengan 2 pegas tersebut dengan menentukan perpanjangan
pegas total di bawah beban statis P. Untuk memudahkan
perhitungan digunakan P = 12 kN maka :
= 1 + 2 = 56
12
4
12
21
m
kNm
kN
kNkN
k
P
k
P m
k = P / = 12 kN / 5 m = 2,4 kN/m = 2400 N/m
Perioda getaran : 93,650
24002 kgm
k mN
n rad/s n
n 2
n = 0,907 s
Kecepatan maksimum : vm = xmn = (0,04 m) (6,93 rad/s) vm = 0,277 m/s
Percepatan maksimum : am = xmn2 = (0,04 m) (6,93 rad/s)2 am = 1,920 m/s2
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 12
RINGKASAN UNTUK BELAJAR MANDIRI
Bab ini mempelajari getaran mekanis, yaitu gerak bolak-balik partikel atau benda
terhadap posisi keseimbangan. Pada pelajaran pertama, kita melihat bahwa getaran
bebas suatu partikel muncul jika partikel tersebut dikenai gaya yang sebanding dengan
perpindahannya dan berlawanan arah, seperti misalnya gaya yang ditimbulkan oleh
pegas (gambar 19.1). Gerak yang dihasilkan disebut gerak harmonis sederhana, yang
dicirikan oleh persamaan diferensial
0 xkxm 19-2)
Dimana x adalah perpindahan partikel, x adalah percepatannya, m adalah massanya dan
k adalah konstanta pegas. Penyelesaian persamaan diferensial ini diperoleh sebagai
berikut
txx nm sin 19-10)
Dimana xm = amplitudo getaran
n = mk / = frekuensi putar natural (rad/s)
= sudut fase (rad)
Kita juga mendefinisikan perioda getaran sebagai waktu nn /2 yang diperlukan
partikel untuk menyelesaikan satu siklus, dan frekuensi natural sebagai jumlah siklus per
detik, 2//1 nnnf , yang dinyatakan dalam Hertz atau s-1. Mendiferensiasi
persamaan 19-10) dua kali menghasilkan kecepatan dan percepatan partikel setiap saat.
Nilai kecepatan dan percepatan maksimum diperoleh sebagai berikut
2
nmmnmm xaxv 19-15)
Untuk menentukan parameter-parameter pada persamaan 19-10) dapat diikuti langkah-
langkah berikut.
1. Gambarkan diagram benda bebas yang menunjukkan gaya-gaya yang bekerja pada
partikel jika partikel itu terletak pada jarak x dari posisi keseimbangannya. Resultan
gaya-gaya akan sebanding dengan x dan arahnya akan berlawanan dengan arah
positif x [persamaan 19-1)].
2. Tuliskan persamaan diferensial dari gerak partikel dengan menyamakan gaya resultan
yang diperoleh pada langkah 1 dengan xm . Ingat bahwa sekali arah positif x telah
ditentukan, konvensi tanda yang sama harus diberlakukan untuk percepatan x .
Setelah pengaturan posisi suku-suku persamaan akan diperoleh bentuk persamaan
19-2)
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 13
3. Tentukan frekuensi putar natural n dengan membagi koefisien x dengan koefisien
x pada persamaan tadi lalu hitunglah nilai akar kuadrat hasilnya. Pastikan bahwa n
dinyatakan dalam rad/s
4. Tentukan amplitudo xm dan sudut fase dengan mensubstitusikan nilai n yang
diperoleh dan nilai awal x dan x dalam persamaan 19-10) dan persamaan yang
diperoleh dari difrensiasi 19-10) terhadap waktu t.
Persamaan 19-10) dan 2 persamaan lain yang diperoleh dari diferensiasi dua kali
terhadap waktu t, dapat digunakan untuk menentukan perpindahan, kecepatan dan
percepatan partikel setiap saat. Persamaan 19-15) menghasilkan kecepatan
maksimum mv dan percepatan maksimum ma .
5. Dapat dilihat juga bahwa untuk osilasi kecil dari pendulum sederhana, sudut yang
dibentuk oleh tali pendulum terhadap sumbu vertikal memenuhi persamaan diferensial
0 l
g 19-17)
dimana l adalah panjang tali dan dinyatakan dalam radian (subbab 19.3).
Persamaan ini menunjukkan kembali bentuk gerak harmonis sederhana dan
penyelesaiannya sama dengan persamaan 19-10),
tnm sin
dimana frekuensi putar natural lgn / dinyatakan dalam rad/s. Penentuan
beberapa konstanta pada persamaan ini diperoleh dengan cara yang sama seperti
diuraikan di atas. Ingat bahwa kecepatan dari bola pendulum sejajar garis singgung
jalur dan besarnya adalah lv , sedangkan percepatan pendulum memiliki
komponen tangensial at, dengan besar lat , dan komponen normal an yang
mengarah pada pusat lingkaran dengan besar 2lan .

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 14
SOAL – SOAL
19.1. Tentukan kecepatan dan percepatan maksimum sebuah partikel yang bergerak
mengikuti gerak harmonis sederhana dengan amplitudo 400 mm dan perioda 1,4 s.
19.2. Tentukan amplitudo dan kecepatan maksimum partikel yang bergerak dalam gerak
harmonis sederhana dengan percepatan maksimum 6,5 m/s2 dan frekuensi 8 Hz.
19.3. Sebuah partikel bergerak dalam gerak harmonis sederhana. Jika diketahui bahwa
amplitudonya 375 mm dan percepatan maksimumnya 4,5 m/s2, tentukan kecepatan
maksimum partikel tersebut dan frekuensi geraknya.
19.4. Sebuah pendulum sederhana terdiri atas bola yang terpasang pada tali, berosilasi
pada bidang vertikal dengan perioda 1,3 s. Jika diasumsikan bergerak dalam gerak
harmonis sederhana dan diketahui bahwa kecepatan maksimum bola adalah 0,4 m/s,
tentukan (a) amplitudo gerak dalam derajat, (b) percepatan tangensial maksimum bola.
19.5. Sebuah pendulum sederhana terdiri atas bola yang terpasang pada tali dengan
panjang l = 1 m berosilasi pada bidang vertikal. Jika diasumsikan bergerak dalam gerak
harmonis sederhana dan diketahui bahwa bola dilepaskan dari posisi = 6o, tentukan (a)
frekuensi getaran, (b) kecepatan maksimum bola.
19.6. Sebuah balok 10 kg mula-mula disangga sehingga pegas yang terpasang
sebagaimana tampak pada gambar tidak terdeformasi. Jika balok tiba-tiba dilepaskan,
tentukan (a) amplitudo dan frekuensi gerak yang terjadi, (b) kecepatan dan percepatan
maksimum balok.
l
m
10 kg
16 kN/m
135 kN/m
32 kg
Gambar P19.4. dan P19.5. Gambar P19.6. Gambar P19.7.
19.7. Balok 32 kg dipasang pada pegas dan dapat bergerak tanpa gesekan dalam slot
sebagaimana tampak pada gambar. Balok berada pada posisi keseimbangan hingga
sebuah palu memukulnya dan memberikan kecepatan awal 3 m/s. Tentukan (a) perioda
dan frekuensi gerak yang terjadi, (b) amplitudo gerak dan percepatan maksimum balok.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 15
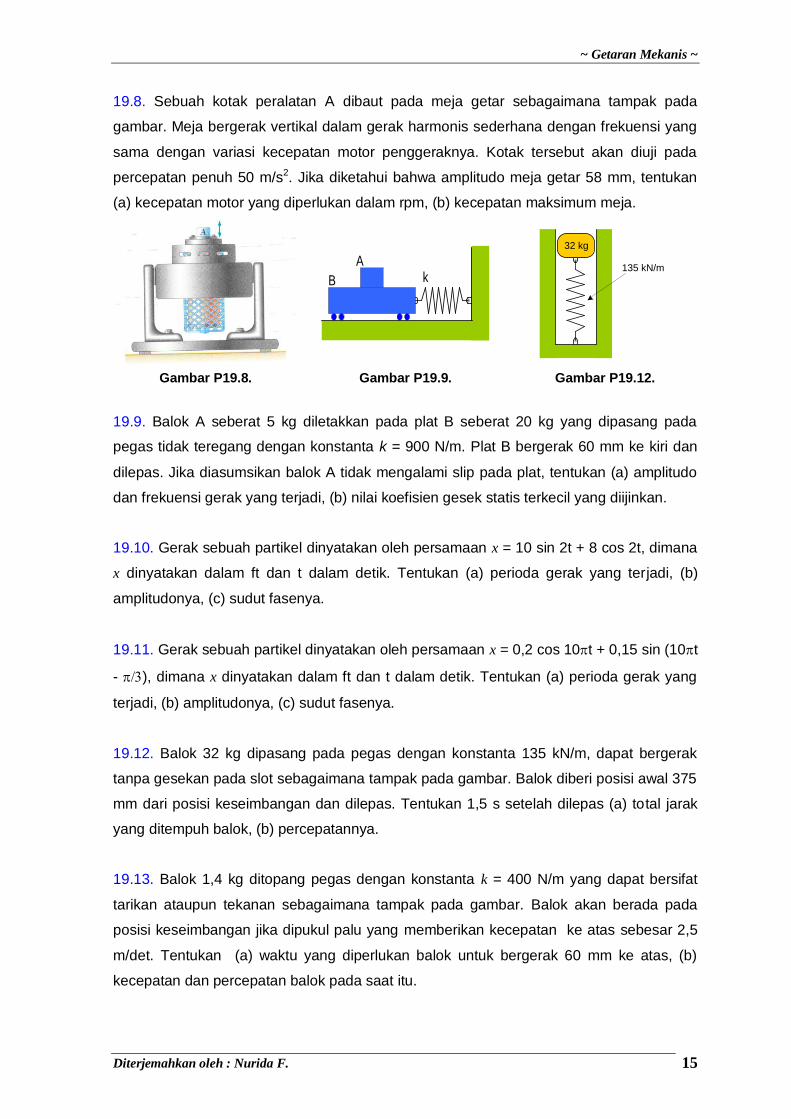
19.8. Sebuah kotak peralatan A dibaut pada meja getar sebagaimana tampak pada
gambar. Meja bergerak vertikal dalam gerak harmonis sederhana dengan frekuensi yang
sama dengan variasi kecepatan motor penggeraknya. Kotak tersebut akan diuji pada
percepatan penuh 50 m/s2. Jika diketahui bahwa amplitudo meja getar 58 mm, tentukan
(a) kecepatan motor yang diperlukan dalam rpm, (b) kecepatan maksimum meja.
A
B k
135 kN/m
32 kg
Gambar P19.8. Gambar P19.9. Gambar P19.12.
19.9. Balok A seberat 5 kg diletakkan pada plat B seberat 20 kg yang dipasang pada
pegas tidak teregang dengan konstanta k = 900 N/m. Plat B bergerak 60 mm ke kiri dan
dilepas. Jika diasumsikan balok A tidak mengalami slip pada plat, tentukan (a) amplitudo
dan frekuensi gerak yang terjadi, (b) nilai koefisien gesek statis terkecil yang diijinkan.
19.10. Gerak sebuah partikel dinyatakan oleh persamaan x = 10 sin 2t + 8 cos 2t, dimana
x dinyatakan dalam ft dan t dalam detik. Tentukan (a) perioda gerak yang terjadi, (b)
amplitudonya, (c) sudut fasenya.
19.11. Gerak sebuah partikel dinyatakan oleh persamaan x = 0,2 cos 10t + 0,15 sin (10t
- ), dimana x dinyatakan dalam ft dan t dalam detik. Tentukan (a) perioda gerak yang
terjadi, (b) amplitudonya, (c) sudut fasenya.
19.12. Balok 32 kg dipasang pada pegas dengan konstanta 135 kN/m, dapat bergerak
tanpa gesekan pada slot sebagaimana tampak pada gambar. Balok diberi posisi awal 375
mm dari posisi keseimbangan dan dilepas. Tentukan 1,5 s setelah dilepas (a) total jarak
yang ditempuh balok, (b) percepatannya.
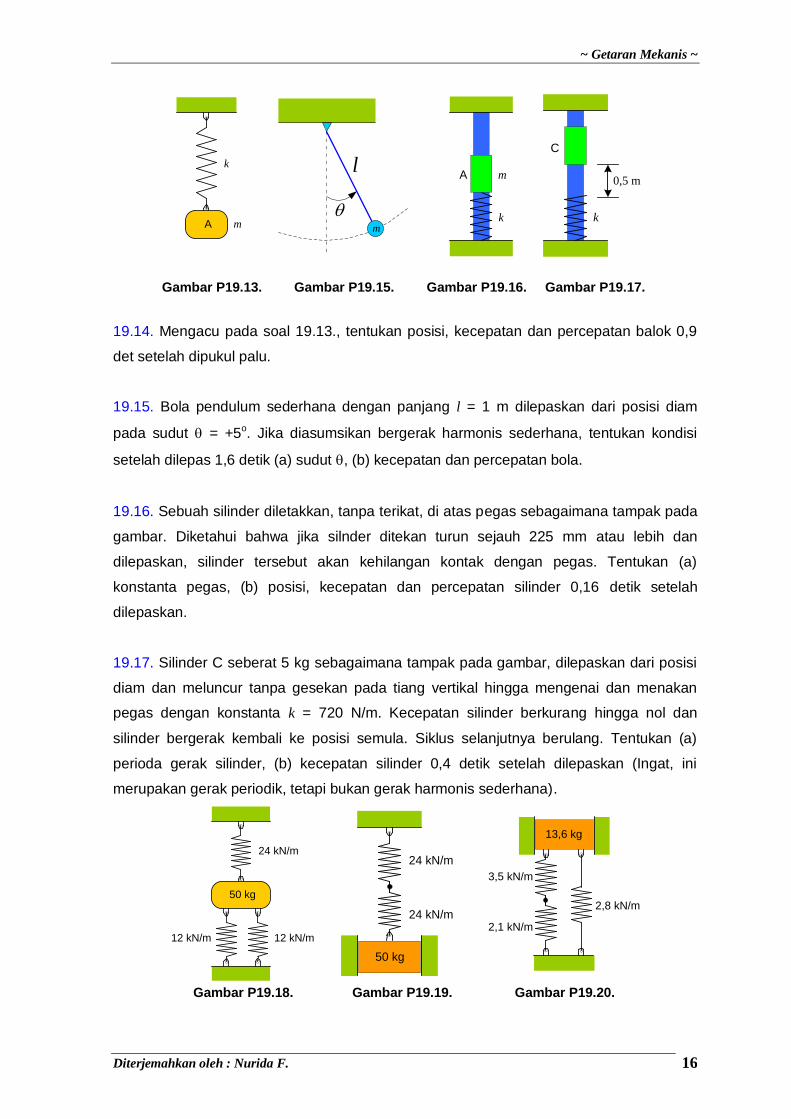
19.13. Balok 1,4 kg ditopang pegas dengan konstanta k = 400 N/m yang dapat bersifat
tarikan ataupun tekanan sebagaimana tampak pada gambar. Balok akan berada pada
posisi keseimbangan jika dipukul palu yang memberikan kecepatan ke atas sebesar 2,5
m/det. Tentukan (a) waktu yang diperlukan balok untuk bergerak 60 mm ke atas, (b)
kecepatan dan percepatan balok pada saat itu.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 16
A
k
m
l
m
A
k
m
C
k
0,5 m
Gambar P19.13. Gambar P19.15. Gambar P19.16. Gambar P19.17.
19.14. Mengacu pada soal 19.13., tentukan posisi, kecepatan dan percepatan balok 0,9
det setelah dipukul palu.
19.15. Bola pendulum sederhana dengan panjang l = 1 m dilepaskan dari posisi diam
pada sudut = +5o. Jika diasumsikan bergerak harmonis sederhana, tentukan kondisi
setelah dilepas 1,6 detik (a) sudut , (b) kecepatan dan percepatan bola.
19.16. Sebuah silinder diletakkan, tanpa terikat, di atas pegas sebagaimana tampak pada
gambar. Diketahui bahwa jika silnder ditekan turun sejauh 225 mm atau lebih dan
dilepaskan, silinder tersebut akan kehilangan kontak dengan pegas. Tentukan (a)
konstanta pegas, (b) posisi, kecepatan dan percepatan silinder 0,16 detik setelah
dilepaskan.
19.17. Silinder C seberat 5 kg sebagaimana tampak pada gambar, dilepaskan dari posisi
diam dan meluncur tanpa gesekan pada tiang vertikal hingga mengenai dan menakan
pegas dengan konstanta k = 720 N/m. Kecepatan silinder berkurang hingga nol dan
silinder bergerak kembali ke posisi semula. Siklus selanjutnya berulang. Tentukan (a)
perioda gerak silinder, (b) kecepatan silinder 0,4 detik setelah dilepaskan (Ingat, ini
merupakan gerak periodik, tetapi bukan gerak harmonis sederhana).
50 kg
12 kN/m 12 kN/m
24 kN/m
50 kg
24 kN/m
24 kN/m
13,6 kg
2,1 kN/m
3,5 kN/m
2,8 kN/m
Gambar P19.18. Gambar P19.19. Gambar P19.20.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 17
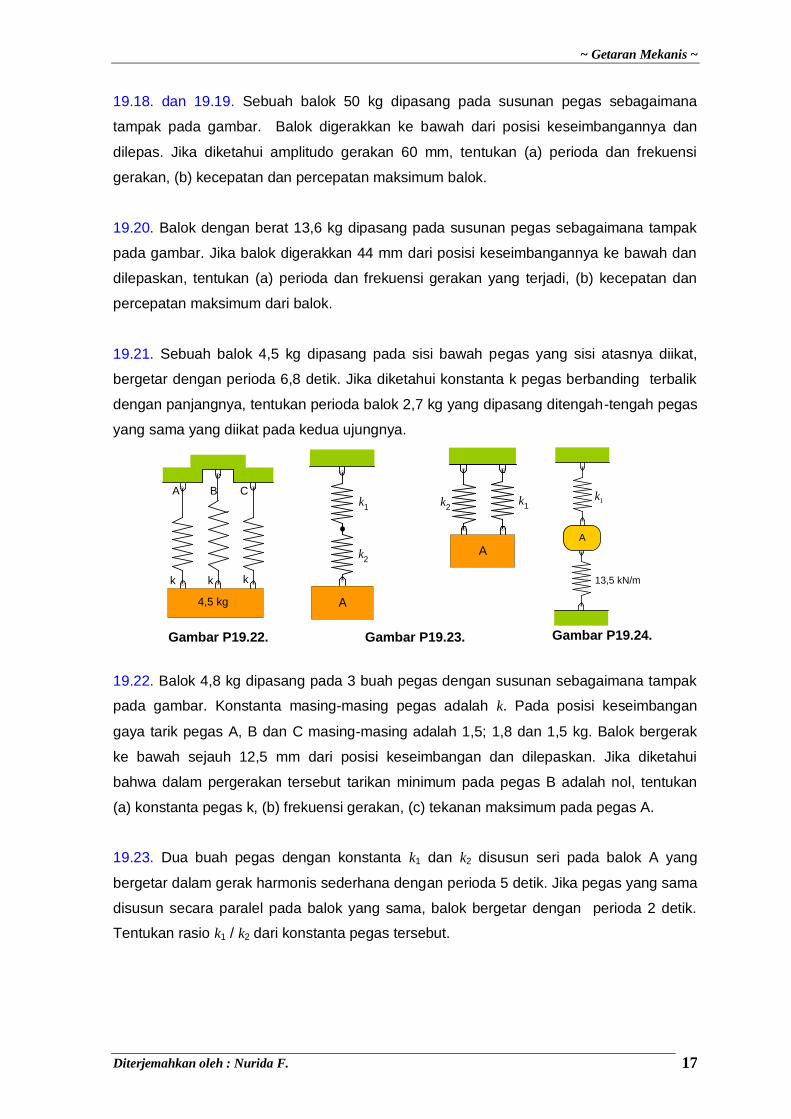
19.18. dan 19.19. Sebuah balok 50 kg dipasang pada susunan pegas sebagaimana
tampak pada gambar. Balok digerakkan ke bawah dari posisi keseimbangannya dan
dilepas. Jika diketahui amplitudo gerakan 60 mm, tentukan (a) perioda dan frekuensi
gerakan, (b) kecepatan dan percepatan maksimum balok.
19.20. Balok dengan berat 13,6 kg dipasang pada susunan pegas sebagaimana tampak
pada gambar. Jika balok digerakkan 44 mm dari posisi keseimbangannya ke bawah dan
dilepaskan, tentukan (a) perioda dan frekuensi gerakan yang terjadi, (b) kecepatan dan
percepatan maksimum dari balok.
19.21. Sebuah balok 4,5 kg dipasang pada sisi bawah pegas yang sisi atasnya diikat,
bergetar dengan perioda 6,8 detik. Jika diketahui konstanta k pegas berbanding terbalik
dengan panjangnya, tentukan perioda balok 2,7 kg yang dipasang ditengah-tengah pegas
yang sama yang diikat pada kedua ujungnya.
C
4,5 kg
BA
kkk
A
k1
k2
k2
A
k1
1k
13,5 kN/m
A
Gambar P19.22. Gambar P19.23. Gambar P19.24.
19.22. Balok 4,8 kg dipasang pada 3 buah pegas dengan susunan sebagaimana tampak
pada gambar. Konstanta masing-masing pegas adalah k. Pada posisi keseimbangan
gaya tarik pegas A, B dan C masing-masing adalah 1,5; 1,8 dan 1,5 kg. Balok bergerak
ke bawah sejauh 12,5 mm dari posisi keseimbangan dan dilepaskan. Jika diketahui
bahwa dalam pergerakan tersebut tarikan minimum pada pegas B adalah nol, tentukan
(a) konstanta pegas k, (b) frekuensi gerakan, (c) tekanan maksimum pada pegas A.
19.23. Dua buah pegas dengan konstanta k1 dan k2 disusun seri pada balok A yang
bergetar dalam gerak harmonis sederhana dengan perioda 5 detik. Jika pegas yang sama
disusun secara paralel pada balok yang sama, balok bergetar dengan perioda 2 detik.
Tentukan rasio k1 / k2 dari konstanta pegas tersebut.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 18
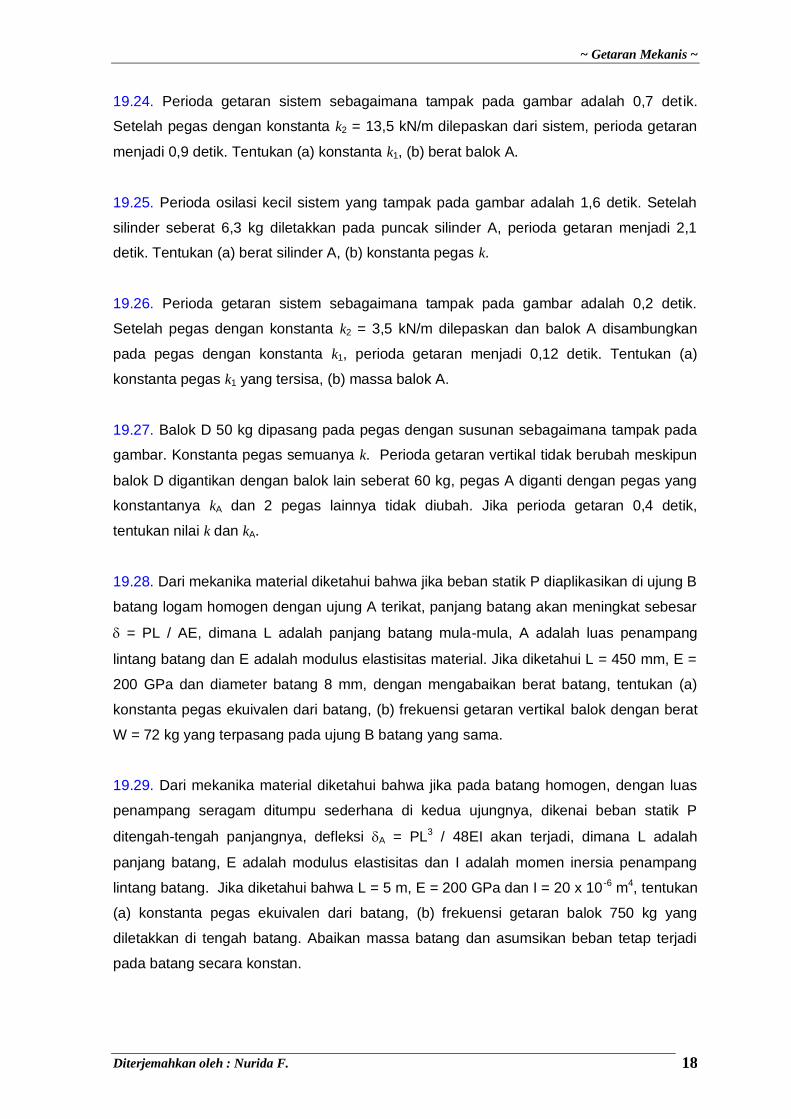
19.24. Perioda getaran sistem sebagaimana tampak pada gambar adalah 0,7 detik.
Setelah pegas dengan konstanta k2 = 13,5 kN/m dilepaskan dari sistem, perioda getaran
menjadi 0,9 detik. Tentukan (a) konstanta k1, (b) berat balok A.
19.25. Perioda osilasi kecil sistem yang tampak pada gambar adalah 1,6 detik. Setelah
silinder seberat 6,3 kg diletakkan pada puncak silinder A, perioda getaran menjadi 2,1
detik. Tentukan (a) berat silinder A, (b) konstanta pegas k.
19.26. Perioda getaran sistem sebagaimana tampak pada gambar adalah 0,2 detik.
Setelah pegas dengan konstanta k2 = 3,5 kN/m dilepaskan dan balok A disambungkan
pada pegas dengan konstanta k1, perioda getaran menjadi 0,12 detik. Tentukan (a)
konstanta pegas k1 yang tersisa, (b) massa balok A.
19.27. Balok D 50 kg dipasang pada pegas dengan susunan sebagaimana tampak pada
gambar. Konstanta pegas semuanya k. Perioda getaran vertikal tidak berubah meskipun
balok D digantikan dengan balok lain seberat 60 kg, pegas A diganti dengan pegas yang
konstantanya kA dan 2 pegas lainnya tidak diubah. Jika perioda getaran 0,4 detik,
tentukan nilai k dan kA.
19.28. Dari mekanika material diketahui bahwa jika beban statik P diaplikasikan di ujung B
batang logam homogen dengan ujung A terikat, panjang batang akan meningkat sebesar
= PL / AE, dimana L adalah panjang batang mula-mula, A adalah luas penampang
lintang batang dan E adalah modulus elastisitas material. Jika diketahui L = 450 mm, E =
200 GPa dan diameter batang 8 mm, dengan mengabaikan berat batang, tentukan (a)
konstanta pegas ekuivalen dari batang, (b) frekuensi getaran vertikal balok dengan berat
W = 72 kg yang terpasang pada ujung B batang yang sama.
19.29. Dari mekanika material diketahui bahwa jika pada batang homogen, dengan luas
penampang seragam ditumpu sederhana di kedua ujungnya, dikenai beban statik P
ditengah-tengah panjangnya, defleksi A = PL3 / 48EI akan terjadi, dimana L adalah
panjang batang, E adalah modulus elastisitas dan I adalah momen inersia penampang
lintang batang. Jika diketahui bahwa L = 5 m, E = 200 GPa dan I = 20 x 10 -6 m4, tentukan
(a) konstanta pegas ekuivalen dari batang, (b) frekuensi getaran balok 750 kg yang
diletakkan di tengah batang. Abaikan massa batang dan asumsikan beban tetap terjadi
pada batang secara konstan.

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 19
19.30. 60 mm defleksi terukur secara langsung pada lantai 2 gedung setelah
pemasangan mesin seberat 6000 kg yang berputar akibat ketidakseimbangan rotor. Jika
diasumsikan defleksi yang terjadi sebanding dengan beban yang ditumpu, tentukan (a)
konstanta pegas ekuivalen dari lantai sistem tersebut, (b) kecepatan putaran mesin dalam
rpm yang harus dihindari agar tidak selaras dengan frekuensi natural lantai.
*19.31. Persamaan defleksi-gaya untuk pegas non-linier yang satu ujungnya terpasang
tetap adalah F = 4x1/2 dimana F adalah gaya dengan satuan N yang bekerja di ujung
lainnya dan x adalah defleksi dengan satuan m. (a) Tentukan defleksi xo jika 100 gram
balok dipasang pada pegas dan tercapai keseimbangan. (b) Jika diasumsikan bahwa
slope kurva gaya-defleksi pada titik pembebanan tersebut dapat digunakan sebagai
konstanta pegas ekuivalen, tentukan frekuensi getaran balok jika ditarik sedikit dari titik
keseimbangan dan dilepaskan.
19.32. Batang AB dipasang pada gantungan A dengan 2 buah pegas sebagaimana
tampak pada gambar. Konstanta pegas masing-masing adalah k. (a) Tentukan massa
balok C yang mengakibatkan getaran dengan perioda 4 detik. (b) Jika ujung B ditekan
sejauh 60 mm dan dilepaskan, tentukan kecepatan maksimum balok C. Abaikan massa
batang dan asumsikan bahwa tiap pegas dapat berfungsi tarik ataupun tekan.
19.33. Jika defleksi statis batang yang dikenai beban dinotasikan sebagai st, tunjukkan
bahwa frekuensi getaran beban akan sama dengan
st
gf
2
1
Abaikan massa batang dan asumsikan bahwa beban batang konstan.
*19.34. Jika integran pada persamaan 19-19) sub bab 19.4. diekspansikan pada deret
pangkat genap dari sin dan diintegrasi, tunjukkan bahwa perioda pendulum sederhana
dengan panjang l dapat didekati dengan rumusan
2sin
4
112 2 m
g
l
Dimana m adalah amplitudo osilasi.
*19.35. Menggunakan rumus yang diberikan pada soal 19.34, tentukan amplitudo m yang
menyebabkan perioda pendulum sederhana lebih panjang ¾ persen dari perioda
berosilasi kecil pendulum yang sama.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 20
*19.36. Menggunakan data pada tabel 19.1., tentukan perioda pendulum sederhana
dengan panjang l = 600 mm (a) untuk osilasi kecil, (b) untuk osilasi dengan amplitudo m
= 30o, (c) untuk osilasi dengan amplitudo m = 120o.
*19.37. Menggunakan data pada tabel 19.1., tentukan panjang pendulum sederhana
dalam inchi, yang bergetar dengan perioda 3 detik dan amplitudo m = 60o.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 21
19.5. GETARAN BEBAS BENDA KAKU
Analisa dari getaran benda kaku atau suatu sistem benda kaku yang memiliki satu
derajat kebebasan mirip dengan analisa getaran partikel. Beberapa variabel, seperti jarak
x atau sudut , dipilih untuk menentukan posisi dari benda atau sistem benda dan
persamaan yang menghubungkan variabel tersebut dengan turunan kedua terhadap
waktu t, dituliskan. Jika persamaan yang diperoleh memiliki bentuk yang sama dengan
persamaan 19-6), yaitu jika diperoleh
02 xx n atau 02 n 19-21)
Getaran yang terjadi adalah gerak harmonis sederhana. Perioda dan frekuensi natural
getaran tersebut dapat diperoleh dengan menentukan n dan mensubstitusikan nilainya
pada persamaan 19-13) dan 19-14).
Secara umum, cara sederhana untuk memperoleh persamaan 19-21) adalah
dengan menyatakan bahwa sistem gaya-gaya eksternal adalah sebanding dengan sistem
gaya-gaya efektif dengan menggambarkan persamaan diagram benda bebas untuk
sembarang nilai variabel dan menuliskan persamaan gerak yang bersesuaian. Proses ini
disebut sebagai Penentuan koefisien variabel x atau , bukan penentuan variabel itu
sendiri atau turunan x atau . Dengan menyamakan koefisien ini dengan 2
n akan
diperoleh frekuensi putar natural n , dimana n dan nf dapat ditentukan.
Metode di atas dapat digunakan untuk menganalisa getaran-getaran yang benar-
benar menunjukkan karakter gerak harmonis sederhana, atau getaran-getaran
beramplitudo kecil yang dapat didekati sebagai gerak harmonis sederhana. Sebagai
contoh, jika ditentukan perioda osilasi kecil sebuah plat segiempat bersisi 2b yang ditahan
di titik tengah O pada salah satu sisinya (Gb. 19.5a). Dipandang satu kondisi bahwa
posisi plat ditentukan dengan sudut yang dibentuk garis OG terhadap sumbu vertikal
dan digambarkan persamaan diagram benda bebas untuk menyatakan bahwa berat W
dari plat dan komponen-komponen Rx dan Ry dari reaksi pada titik O adalah ekuivalen
dengan vektor-vektor mat dan man juga ekuivalen dengan kopel I (Gb. 19.5b). Selama
kecepatan dan percepatan putar plat sama, yaitu dan , nilai kedua vektor tersebut
adalah mb dan 2mb , sedangkan momen kopelnya adalah I . Pada penerapan
metode ini sebelumnya (bab 16) telah dicoba kemungkinan untuk mengasumsikan arah
yang benar dari percepatan. Dalam hal ini, bagaimanapun, kita harus mengasumsikan
arah positif yang sama untuk dan agar diperoleh persamaan 19-21).
Konsekuensinya, percepatan putar diasumsikan positif jika berlawanan arah jarum jam
meskipun asumsi ini biasanya tidak realistis.

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 22
O
G
A
b
b
2b
3
5b
(a)
O
G
W
Ry
Rx
O
G
(b)
namtam
I
Gambar 19.5.
Dengan menyamakan momen-momen terhadap O akan diperoleh
+ IbmbbW )()sin(
Mengingat 2
3222
121 ])2()2[( mbbbmI dan W = mg , diperoleh
0sin5
3
b
g 19-22)
Untuk osilasi-osilasi amplitudo kecil, sin dapat diganti dengan , dinyatakan dalam
radian, sehingga
05
3
b
g 19-23)
Dibandingkan dengan persamaan 19-21) tampak bahwa persamaan yang diperoleh
adalah gerak harmonis sederhana dan frekuensi putar natural n osilasi ini adalah
21
)5/3( bg . Substitusi pada persamaan 19-13) akan menghasilkan perioda osilasi
g
b
n
n3
52
2
19-24)
Hasil yang diperoleh adalah valid hanya untuk osilasi-osilasi amplitudo kecil. Penjabaran
yang lebih akurat dari gerak plat diperoleh dengan membandingkan persamaan 19-16)
dan 19-22). Catat bahwa kedua persamaan tersebut identik jika dipilih l sama dengan
5b/3. Ini berarti bahwa plat akan berosilasi sebagai pendulum sederhana dengan panjang
l = 5b/3 dan hasil dari subbab 19.4 dapat digunakan untuk mengkoreksi nilai perioda yang
diperoleh dari persamaan 19-24). Titik A pada plat yang terletak pada garis OG dengan
jarak l = 5b/3 dari titik O dinamakan Pusat Osilasi terhadap O (Gb. 19.5a).

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 23
CONTOH SOAL 19-2
B
r
Sebuah silinder dengan berat W dan jari-jari r dipasang pada tali
sebagaimana tampak pada gambar. Salah satu ujung tali dipasang
pada sambungan kaku sementara ujung lainnya dihubungkan
dengan pegas yang memiliki konstanta pegas k. Tentukan perioda
dan frekuensi natural getaran silinder.
PENYELESAIAN :
Kinematika gerak. Pergeseran linier dan percepatan silinder dinyatakan dalam
pergeseran putar . Dipilih putaran searah jarum jam sebagai arah positif dan pergeseran
diukur dari posisi keseimbangan. Maka didapat
rx rx 22
rra (1)
B
Bx
a
I
am
T1
T2
2r
G
W
A A
Persamaan Gerak. Sistem gaya-gaya eksternal yang bekerja pada silinder terdiri atas
gaya berat W, gaya tarik tali T1 dan T2. Sistem ini ekuivalen dengan sistem gaya efektif
yang diwakili oleh vektor am pada G dan kopel I .
effAA MM )( IramrTWr )2(2 (2)
Pada saat silinder berada pada posisi keseimbangan, gaya tarik tali : To = ½ W. Jika
dinyatakan dalam variabel pergeseran putar , nilai T2 adalah :
)2(21
21
2 rkWkWkTT o (3)
Substitusi persamaan 1) dan 3) dalam 2) dengan mengingat bahwa 2
21 mrI diperoleh
2
21
21 )()2)(2( mrrrmrkrWWr
03
8
m
k yang merupakan ciri persamaan gerak harmonis sederhana, maka
m
kn
3
82 m
kn
3
8
k
m
n
n8
32
2
m
kf n
n3
8
2
1
2

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 24
CONTOH SOAL 19-3
Sebuah piringan bulat
PENYELESAIAN :
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 25
RINGKASAN UNTUK BELAJAR MANDIRI
Dalam subbab ini dapat dilihat bahwa sebuah benda kaku, atau suatu sistem
benda kaku, dimana posisinya ditentukan oleh koordinat tunggal x atau , akan
menghasilkan gerak harmonis sederhana jika persamaan diferensial yang diperoleh dari
aplikasi Hukum Newton II berbentuk
02 xx n atau 02 n 19-21)
Tujuan yang harus dicapai adalah menentukan n, untuk menentukan perioda n dan
frekuensi natural nf . Dengan memberikan nilai untuk kondisi awal, persamaan gerak
dapat ditulis dalam bentuk
txx nm sin 19-10)
Dalam hal ini x dapat digantikan dengan jika melibatkan gerak putar. Untuk
menyelesaikan permasalahan pada subbab ini dapat diikuti langkah-langkah berikut.
1. Tentukan sistem koordinat yang digunakan untuk mengukur pergeseran benda dari
titik keseimbangannya. Dalam subbab ini akan ditemui banyak sekali permasalahan
yang melibatkan gerak putar benda terhadap satu sumbu tetap dan bahwa sudut yang
menunjukkan pergerakan benda dari posisi keseimbangan merupakan koordinat yang
paling memudahkan untuk digunakan. Pada permasalahan yang melibatkan gerak
datar suatu benda secara umum, dimana koordinat x (dan mungkin juga koordinat y)
digunakan untuk menentukan posisi pusat massa G dari benda, dan koordinat
digunakan untuk mengukur putaran terhadap G, temukan hubungan kinematis yang
memungkinkan untuk menyatakan x (dan y) dalam variabel [contoh soal 19.2].
2. Tuliskan persamaan diagram benda bebas untuk menyatakan bahwa sistem gaya-
gaya eksternal ekuivalen dengan sistem gaya-gaya efektif yang terdiri atas vektor
am dan kopel I , dimana xa dan . Pastikan bahwa setiap gaya atau kopel
yang bekerja digambarkan pada arah yang konsisten dengan pergerakan yang
diasumsikan dan bahwa tanda untuk a dan , secara berturut-turut, adalah pada arah
dimana koordinat x dan membesar.
3. Tuliskan persamaan diferensial gerak dengan menyamakan jumlah komponen gaya-
gaya eksternal dan gaya-gaya efektif pada arah x dan y, dan jumlah momen-momen
gaya tersebut terhadap titik yang ditentukan. Jika diperlukan, gunakan hubungan
kinematika yang diperoleh pada langkah 1 untuk mendapatkan persamaan yang
hanya menggunakan variabel . Jika merupakan sudut kecil, gantilah sin dengan
dan cos dengan 1, jika fungsi ini muncul pada persamaan. Dengan mengeliminasi

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 26
setiap reaksi yang tidak diketahui, akan diperoleh persamaan yang setipe dengan
persamaan 19.21). Catat bahwa dalam permasalahan yang melibatkan pergerakan
benda terhadap sumbu tetap, akan diperoleh persamaan dengan cepat melalui
penyamaan momen-momen gaya eksternal dan gaya efektif terhadap sumbu tersebut.
4. Bandingkan persamaan yang diperoleh dengan persamaan 19.21), sehingga dapat
diidentifikasi 2
n dan, sekaligus, dapat ditentukan frekuensi putar natural n . Ingat
bahwa obyek yang dianalisis tidak dapat diselesaikan dengan persamaan diferensial
tersebut, namun dalam hal ini persamaan yang diperoleh digunakan untuk
mengidentifikasi 2
n .
5. Tentukan amplitudo dan sudut fase , dengan mensubstitusikan nilai n yang
diperoleh, nilai awal koordinat dan turunan pertamanya pada persamaan 19.10) dan
persamaan yang diperoleh dari diferensiasi persamaan 19.10) terhadap t. Dari
persamaan 19.10) dan dua persamaan hasil diferensiasi dua kali terhadap t, serta
menggunakan hubungan kinematik yang didapatkan pada langkah 1, dapat ditentukan
posisi, kecepatan dan percepatan setiap titik pada benda di setiap waktu yang
ditentukan.
6. Pada permasalahan yang melibatkan getaran torsional, konstanta pegas torsional K
dinyatakan dalam N.m/rad atau lb.ft/rad. Perkalian K dengan sudut puntir , yang
dinyatakan dalam radian, menghasilkan momen kopel restorasi, yang harus
disamakan dengan jumlah momen gaya-gaya efektif, atau kopel terhadap sumbu
rotasi [contoh soal 19.3]

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 27
SOAL – SOAL
19.38. Batang homogen AC seberat 4,5 kg dipasang pada pegas yang memiliki konstanta
k = 750 N/m pada B dan k = 900 N/m pada C yang dapat bekerja pada kondisi tarik atau
tekan. Jika ujung C ditekan sedikit kemudian dilepaskan, tentukan (a) frekuensi getaran,
(b) amplitudo gerak di titik C, jika kecepatan maksimum pada titik tersebut 0,8 m/s.
19.39. Batang homogen AB seberat 9 kg dipasang pada pegas di titik A dan B yang
masing-masing memiliki konstanta 850 N/m dan dapat bekerja pada kondisi tarik atau
tekan. Jika ujung A ditekan sedikit kemudian dilepaskan, tentukan (a) frekuensi getaran,
(b) amplitudo gerak putar, jika kecepatan maksimum pada titik A 1,1 mm/s.
CBA
0,85 m
1,7 m
CB
A
360 mm600 mm
Gambar P19.38. Gambar P19.39.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 28
19.6. PENERAPAN PRINSIP KONSERVASI ENERGI
Tampak pada subbab 19.2 bahwa jika sebuah partikel bermassa m berada dalam
gerak harmonis sederhana, resultant F dari gaya-gaya yang bekerja pada partikel
memiliki nilai yang sebanding dengan perpindahan x diukur dari posisi keseimbangan O
dan mengarah ke O; dituliskan F = - k x. Mengacu pada subbab 13.6, kita tulis F sebagai
Gaya Konservatif dan energi potensial yang bersesuaian dengannya adalah 2
21 kxV
dimana V diasumsikan sama dengan nol pada posisi keseimbangan x = 0. Jika kecepatan
partikel adalah x , energi kinetiknya adalah 2
21 xmT dan total energi partikel yang
dimiliki dapat dituliskan sebagai
T + V = konstan 2
212
21 kxxm konstan
Persamaan dibagi dengan m/2 dan mengacu pada subbab 19.2 bahwa 2/ nmk ,
dimana n adalah frekuensi putar natural dari getaran, didapat
222 xx n konstan 19-25)
Persamaan 19-25) adalah karakteristik dari gerak harmonis sederhana, dapat diperoleh
dari persamaan 19-16) dengan mengalikan kedua sisi dengan x2 dan diintegrasi.
Prinsip konservasi energi menghasilkan cara yang lebih mudah untuk menentukan
perioda getaran benda kaku atau sistem benda kaku dengan satu derajat kebebasan,
pada saat gerak sistem diidentifikasi sebagai gerak harmonis sederhana atau dapat
didekati sebagai gerak harmonis sederhana. Dengan memilih variabel, misalnya jarak x
atau sudut , dapat diambil 2 posisi sesaat sistem :
a. Pergeseran sistem mencapai maksimum : Didapat T1 = 0 dan V1 dapat dinyatakan
dalam xm atau m (dipilih V = 0 pada posisi keseimbangan)
b. Sistem melalui posisi keseimbangan : Didapat V2 = 0 dan T2 dapat dinyatakan dalam
kecepatan maksimum mx atau kecepatan sudut maksimum m
Selanjutnya dapat ditentukan total energi yang dihasilkan dan ditulis T1 + V1 = T2 + V2.
Mengacu dari persamaan 19-15) bahwa untuk gerak harmonis sederhana, kecepatan
maksimum sama dengan perkalian amplitudo dan frekuensi putar natural n , persamaan
ini dapat diselesaikan untuk memperoleh n .
Sebagai contoh, sekali lagi mari kita lihat plat segiempat pada subbab 19.5. Pada
posisi pergeseran maksimum (Gb. 19.6a) didapat
T1 = 0 )cos1()cos(1 mm WbbbWV
Atau untuk 2/)2/(sin2cos1 22
mmm untuk osilasi amplitudo kecil,
T1 = 0 2
21
1 mWbV 19-26)

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 29
Pada saat plat melewati posisi keseimbangan (Gb. 19.6b) kecepatannya maksimum dan
didapat
2
2122
212
212
21
2 mmmm ImbIvmT V2 = 0
Mengacu subbab 19.5 bahwa 2
32 mbI
22
35
21
2 )( mmbT V2 = 0 19-27)
Substitusi persamaan 19-26) dan 19-27) ke dalam T1 + V1 = T2 + V2, dan mengingat
kecepatan maksimum m adalah sama dengan hasilkali nm didapat
222
35
212
21 )( nmm mbWb 19-28)
Yang menghasilkan bgn 5/32 dan
g
b
n
n3
52
2
19-29)
Sebagaimana telah diperoleh.
O
G2
(b)
m
O
G1
W
(a)
0
mb cos
b
datum
W
b
datum
m
Gambar 19.6.

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 30
CONTOH SOAL 19-4
Rr
Tentukan perioda osilasi kecil sebuah silinder dengan
radius r yang berguling tanpa selip dalam permukaan
lengkung dengan radius R.
PENYELESAIAN :
G
Gh
mrR cos)( mR
r
datum
O
rR
Posisi 1
W Posisi 2
W
G
m
r
O
Posisi 2 C
m
mv
Sudut yang dibentuk oleh garis OG terhadap vertikal dinotasikan dengan . Selama
silinder berguling tanpa selip, prinsip konservasi energi dapat diterapkan pada posisi 1,
dimana = m dan pada posisi 2 dimana = 0.
Posisi 1 :
Energi kinetik T1 = 0 selama kecepatan silinder nol
Energi potensial. Dipilih datum sebagaimana tampak pada gambar. Jika W menyatakan
berat silinder, maka )cos1)((1 rRWWhV . Mengacu pada
kondisi osilasi kecil dimana 2/)2/(sin2)cos1( 22 maka
diperoleh 2
)(2
1
mrRWV
Posisi 2 :
Kecepatan sudut yang dibentuk garis OG pada saat silinder berada pada posisi 2
dinyatakan dengan m , dimana pusat rotasi sesaatnya berada pada titik C, maka dapat
dituliskan bahwa mm rRv )( m
m
mr
rR
r
v

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 31
Energi kinetik
2
212
21
2 mm IvmT
222
21
2122
21 ))(()( mm
r
rRmrrRm
22
43 )( mrRm
Energi potensial V2 = 0
Jadi Konservasi Energinya dapat ditulis :
T1 + V1 = T2 + V2
0)(2
)(0 22
43
2
m
m rRmrRW
Diketahui bahwa mnm dan W = mg, didapat :
22
43
2
)()(2
)( mn
m rRmrRmg
jadi rR
gn
3
22
karena n
n
2 maka
g
rRn
2
32

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 32
RINGKASAN UNTUK BELAJAR MANDIRI
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 33
19.7. GETARAN PAKSA
Satu bentuk getaran yang sangat penting jika dipandang dari sisi penerapan di
bidang teknik adalah Getaran Paksa dari suatu sistem. Getaran ini terjadi jika suatu
sistem dikenai gaya periodik atau jika sistem tersebut dihubungkan secara elastis dengan
penyangga yang memiliki gerakan bolak-balik.
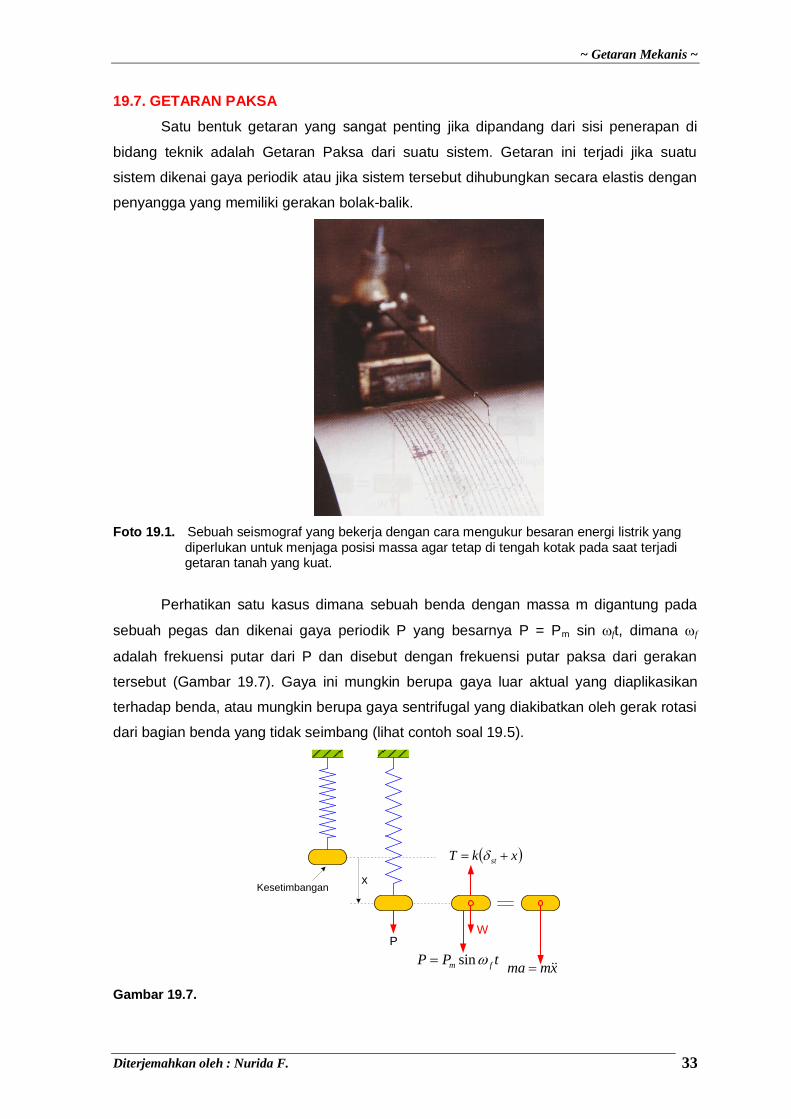
Foto 19.1. Sebuah seismograf yang bekerja dengan cara mengukur besaran energi listrik yang diperlukan untuk menjaga posisi massa agar tetap di tengah kotak pada saat terjadi getaran tanah yang kuat.
Perhatikan satu kasus dimana sebuah benda dengan massa m digantung pada
sebuah pegas dan dikenai gaya periodik P yang besarnya P = Pm sin ft, dimana f
adalah frekuensi putar dari P dan disebut dengan frekuensi putar paksa dari gerakan
tersebut (Gambar 19.7). Gaya ini mungkin berupa gaya luar aktual yang diaplikasikan
terhadap benda, atau mungkin berupa gaya sentrifugal yang diakibatkan oleh gerak rotasi
dari bagian benda yang tidak seimbang (lihat contoh soal 19.5).
Kesetimbanganx
PW
xkT st
tPP fm sinxmma
Gambar 19.7.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 34
Dengan menotasikan x sebagai perpindahan benda yang diukur dari posisi seimbang,
maka persamaan geraknya dapat dituliskan sebagai berkut :
+F = ma; Pm sin f t + W – k(st + x) = m x
Dengan mengingat bahwa W = kst, maka :
m x + k x = Pm sin f t (19.30)
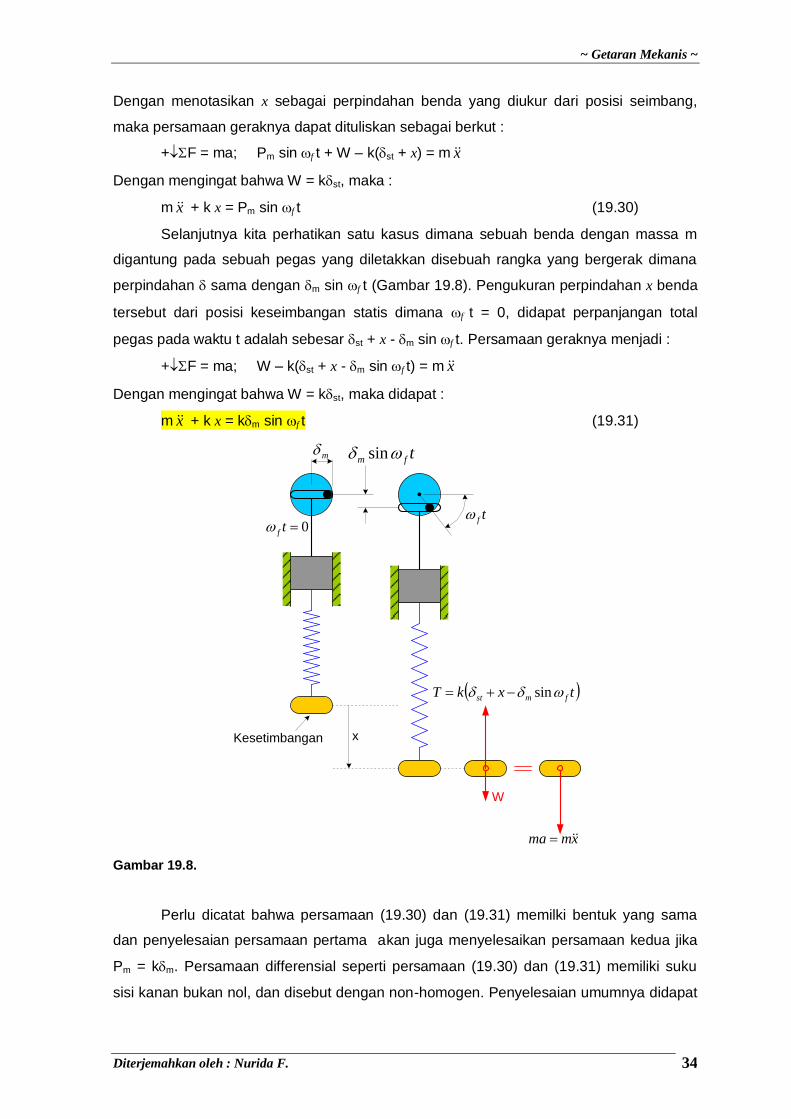
Selanjutnya kita perhatikan satu kasus dimana sebuah benda dengan massa m
digantung pada sebuah pegas yang diletakkan disebuah rangka yang bergerak dimana
perpindahan sama dengan m sin f t (Gambar 19.8). Pengukuran perpindahan x benda
tersebut dari posisi keseimbangan statis dimana f t = 0, didapat perpanjangan total
pegas pada waktu t adalah sebesar st + x - m sin f t. Persamaan geraknya menjadi :
+F = ma; W – k(st + x - m sin f t) = m x
Dengan mengingat bahwa W = kst, maka didapat :
m x + k x = km sin f t (19.31)
Kesetimbangan x
W
xmma
m tfm sin
tf0tf
txkT fmst sin
Gambar 19.8.
Perlu dicatat bahwa persamaan (19.30) dan (19.31) memilki bentuk yang sama
dan penyelesaian persamaan pertama akan juga menyelesaikan persamaan kedua jika
Pm = km. Persamaan differensial seperti persamaan (19.30) dan (19.31) memiliki suku
sisi kanan bukan nol, dan disebut dengan non-homogen. Penyelesaian umumnya didapat
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 35
dengan menambahkan penyelesaian khusus dari persamaan tersebut ke dalam
penyelesaian umum dari persamaan homogen yang bersesuaian (dimana suku sisi kanan
sama dengan nol). Penyelesaian khusus (partikular) dari persamaan (19.30) dan (19.31)
dapat diperoleh dengan mencoba penyelesaian berbentuk :
xpart = xm sin f t (19.32)
Substitusikan xpart untuk x ke persamaan (19.30) akandiperoleh :
-mf 2 xm sin f t + k xm sin f t = Pm sin f t
Yang dapat diselesaikan, untuk amplitudo :
2
f
mm
mk
Px
Dari persamaan (19.4) dimana k/m = n2, dimana n adalah frekuensi putar natural
sistem, maka :
2/1
/
nf
m
m
kPx
(19.33)
Substitusi persamaan (19.32) ke dalam persamaan (19.31) akan didapat penyelesaian
yang sejenis :
2/1 nf
m
mx
(19.33’)
Persamaan homogen yang bersesuaian dengan persamaan (19.30) atau (19.31) adalah
persamaan (19.2) yang mendefinisikan getaran bebas suatu benda. Penyelesaian
umumnya disebut dengan fungsi komplementer, dapat ditemukan pada sub bab 19.2 :
xcomp = C1 sin nt + C2 cos nt (19.34)
Dengan menambahkan penyelesaian khusus (19.32) ke persamaan komplementer
(19.34), kita akan memperoleh penyelesaian umum dari persamaan (19.30) dan (19.31) :
x = C1 sin nt + C2 cos nt + xm sin f t (19.35)
Perlu diingat bahwa getaran yang terjadi terdiri dari 2 buah getaran superposisi.
Dua suku pertama dalam persamaan (19.35) menggambarkan getaran bebas sistem.
Frekuensi getaran ini adalah frekuensi natural sistem yang hanya tergantung pada
konstanta pegas k dan massa benda m, sedangkan konstanta C1 dan C2 dapat diturunkan
dari kondisi awalnya (kondisi inisial). Getaran bebas ini juga disebut dengan getaran
transien, karena dalam aplikasinya getaran ini akan segera diredam oleh gaya gesek (sub
bab 19.9).
Suku terakhir pada persamaan (19.35) menggambarkan kondisi stedi getaran
yang dihasilkan yang disebabkan dan dijaga oleh gaya luar atau gerakan penyangga.
Frekuensinya adalah frekuensi paksa yang dihasilkan oleh gaya luar atau gerakan
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 36
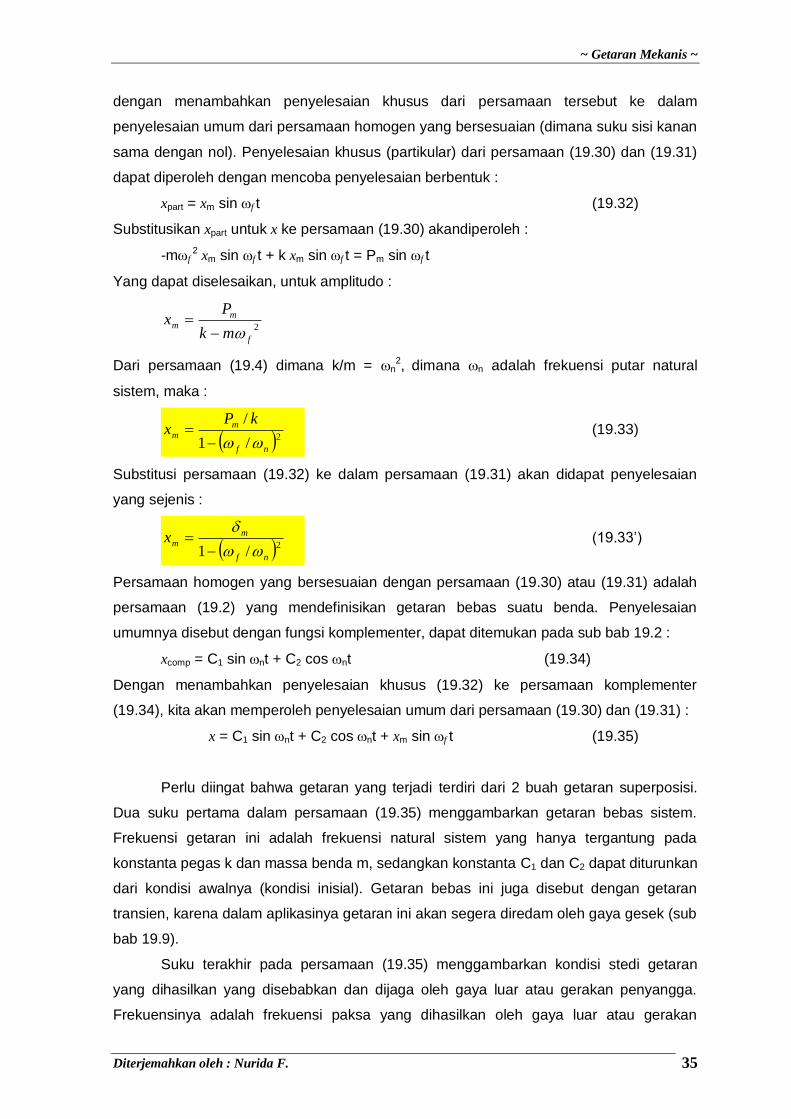
penyangga tersebut dan amplitudo xm didefinisikan oleh persamaan (19.33) atau (19.33’),
tergantung pada rasio frekuensi f /n. Rasio dari amplitudo xm getaran kondisi stedi
terhadap defleksi statis Pm/k yang disebabkan oleh gaya Pm, atau terhadap amplitudo m
dari gerakan penyangga disebut faktor pembesaran. Dari persamaan (19.33) dan (19.33’)
didapat :
Faktor pembesaran = 2/1
1
/nfm
m
m
m x
kP
x
(19.36)
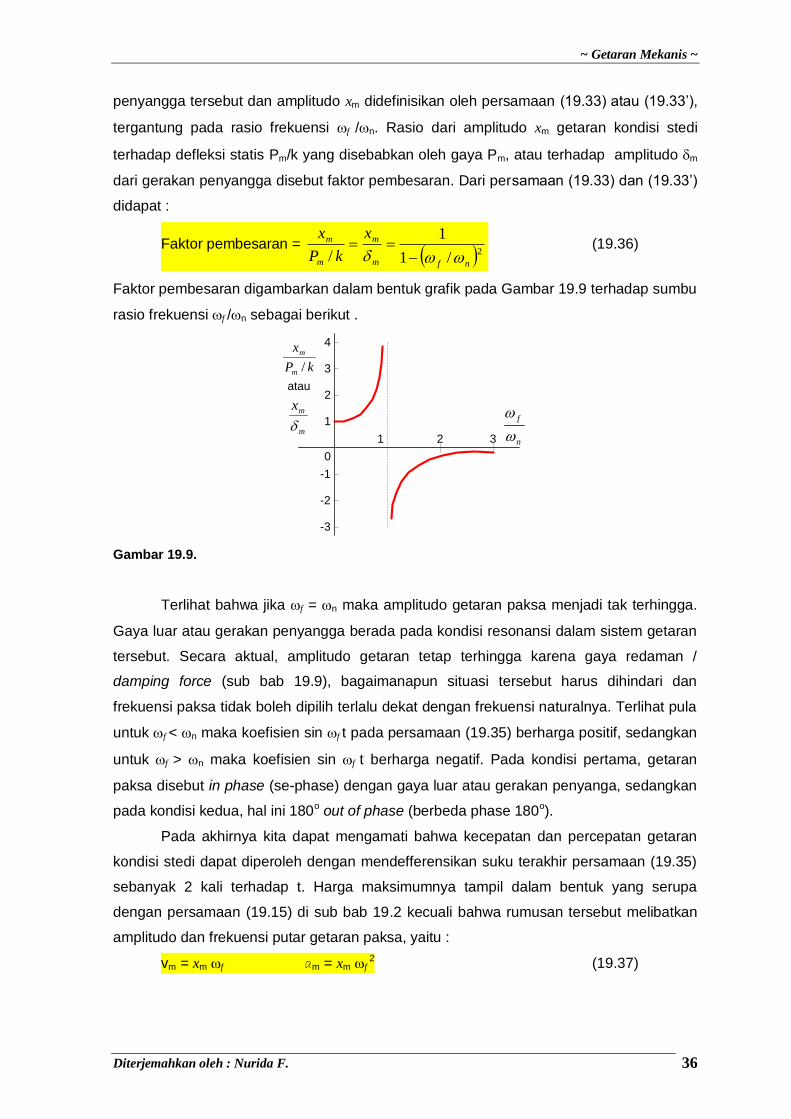
Faktor pembesaran digambarkan dalam bentuk grafik pada Gambar 19.9 terhadap sumbu
rasio frekuensi f /n sebagai berikut .
4
3
2
1
0
-1
-2
-3
321 n
f
kP
x
m
m
/
m
mx
atau
Gambar 19.9.
Terlihat bahwa jika f = n maka amplitudo getaran paksa menjadi tak terhingga.
Gaya luar atau gerakan penyangga berada pada kondisi resonansi dalam sistem getaran
tersebut. Secara aktual, amplitudo getaran tetap terhingga karena gaya redaman /
damping force (sub bab 19.9), bagaimanapun situasi tersebut harus dihindari dan
frekuensi paksa tidak boleh dipilih terlalu dekat dengan frekuensi naturalnya. Terlihat pula
untuk f < n maka koefisien sin f t pada persamaan (19.35) berharga positif, sedangkan
untuk f > n maka koefisien sin f t berharga negatif. Pada kondisi pertama, getaran
paksa disebut in phase (se-phase) dengan gaya luar atau gerakan penyanga, sedangkan
pada kondisi kedua, hal ini 180o out of phase (berbeda phase 180o).
Pada akhirnya kita dapat mengamati bahwa kecepatan dan percepatan getaran
kondisi stedi dapat diperoleh dengan mendefferensikan suku terakhir persamaan (19.35)
sebanyak 2 kali terhadap t. Harga maksimumnya tampil dalam bentuk yang serupa
dengan persamaan (19.15) di sub bab 19.2 kecuali bahwa rumusan tersebut melibatkan
amplitudo dan frekuensi putar getaran paksa, yaitu :
vm = xm f am = xm f 2 (19.37)

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 37
CONTOH SOAL 19.5.
Sebuah motor dengan massa 150 kg disangga oleh 4
pegas yang masing-masing memiliki konstanta 135
kN/m. Ketidak seimbangan rotor adalah ekuivalen
terhadap massa 30 gram yang diletakkan sejauh 150
mm dari sumbu rotasi. Jika diketahui bahwa motor
cenderung bergerak vertikal, tentukan :
a. kecepatan dalam rpm dimana resonansi terjadi
b. amplitudo getaran motor pada kecepatan 1200 rpm.
PENYELESAIAN :
a. Kecepatan resonansi.
Kecepatan resonansi sama dengan frekuensi putar natural n (dalam rpm) dari
getaran bebas motor. Massa motor dan konstanta pegas adalah :
m = 150 kg
k = 4 (135 kN/m) = 540 kN/m
kg
mN
m
kn
150
/540000 = 60 rad/det = 573 rpm
Kecepatan resonansi = 573 rpm
b. Amplitudo getaran pada 1200 rpm.
Kecepatan sudut motor dan massa yang tidak seimbang adalah :
= 1200 rpm = 125,7 rpm
m = 30 gram = 0,030 kg
Besar gaya sentrifugal terhadap ketidak seimbangan rotor adalah :
Pm = man = mr2 = (0,030 kg)(0,150 m)(125,7 rad/det)2 = 71,1 N
Defleksi statis yang disebabkan beban konstan Pm :
mkN
N
k
Pm
/540
1,71 = 132 m
Frekuensi gaya putar f dari gerakan adalah kecepatan sudut motor :
f = = 125,7 rad/det
Substitusi nilai Pm/k, f dan n ke persamaan (4) didapat :
22
60/7,1251
132
/1
/
nf
m
m
kPx
= -39 m
xm = 39 m (melebihi fase)
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 38
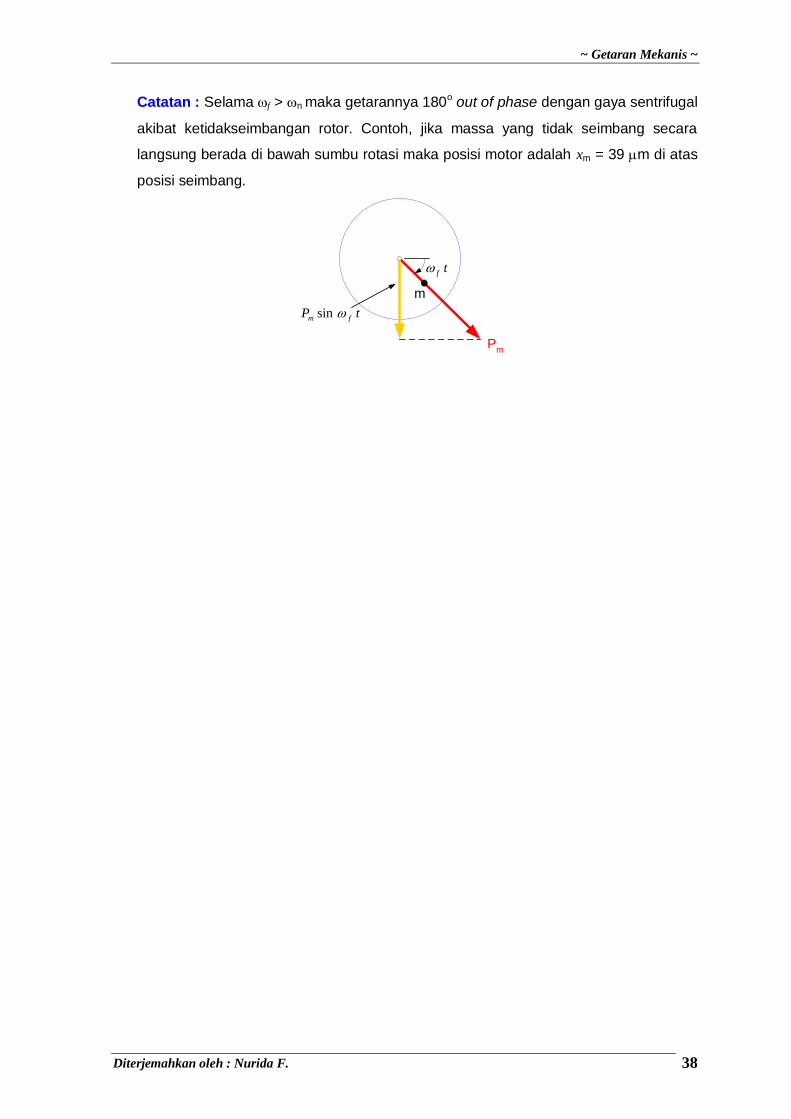
Catatan : Selama f > n maka getarannya 180o out of phase dengan gaya sentrifugal
akibat ketidakseimbangan rotor. Contoh, jika massa yang tidak seimbang secara
langsung berada di bawah sumbu rotasi maka posisi motor adalah xm = 39 m di atas
posisi seimbang.
tf
tP fm sin
Pm
m

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 39
RINGKASAN UNTUK BELAJAR MANDIRI

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 40
SOAL – SOAL
15 kN/m30 kg
tPP fm sin
19.98. Balok 30 kg dipasang pada pegas dengan konstanta
k = 15 kN/m yang dapat bergerak tanpa gesekan dalam slot
vertikal sebagaimana tampak pada gambar di bawah ini.
Sistem ini bekerja akibat gaya periodik tPP fm sin
dimana f = 10 rad/s. Jika diketahui amplitudo gerak
adalah 18 mm, tentukan nilai Pm.
19.99. Sebuah slot 4 kg dapat bergeser tanpa gesekan pada batang horisontal dan
dipasang pada pegas dengan konstanta 450 N/m. Sistem ini digerakkan oleh gaya
periodik tPP fm sin dengan Pm = 13 N. Tentukan amplitudo gerakan slot jika (a)
diketahui f = 5 rad/s, (b) f = 10 rad/s.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 41
GETARAN TEREDAM
*19.8. GETARAN BEBAS TEREDAM
Sistem getaran yang dipelajari pada bagian pertama bab ini diasumsikan tanpa
redaman. Sebenarnya semua getaran mengalami beberapa derajat redaman akibat gaya-
gaya gesek. Gaya-gaya ini dapat disebabkan oleh gesekan kering, atau gesekan
Coulomb, antara benda-benda kaku; oleh gesekan fluida jika benda kaku bergerak di
dalam fluida, atau oleh gesekan internal antara molekul-molekul benda elastis.
Satu tipe redaman khusus adalah viscous damping yang disebabkan oleh
gesekan fluida pada kecepatan rendah dan medium. Redaman viskos dicirikan oleh
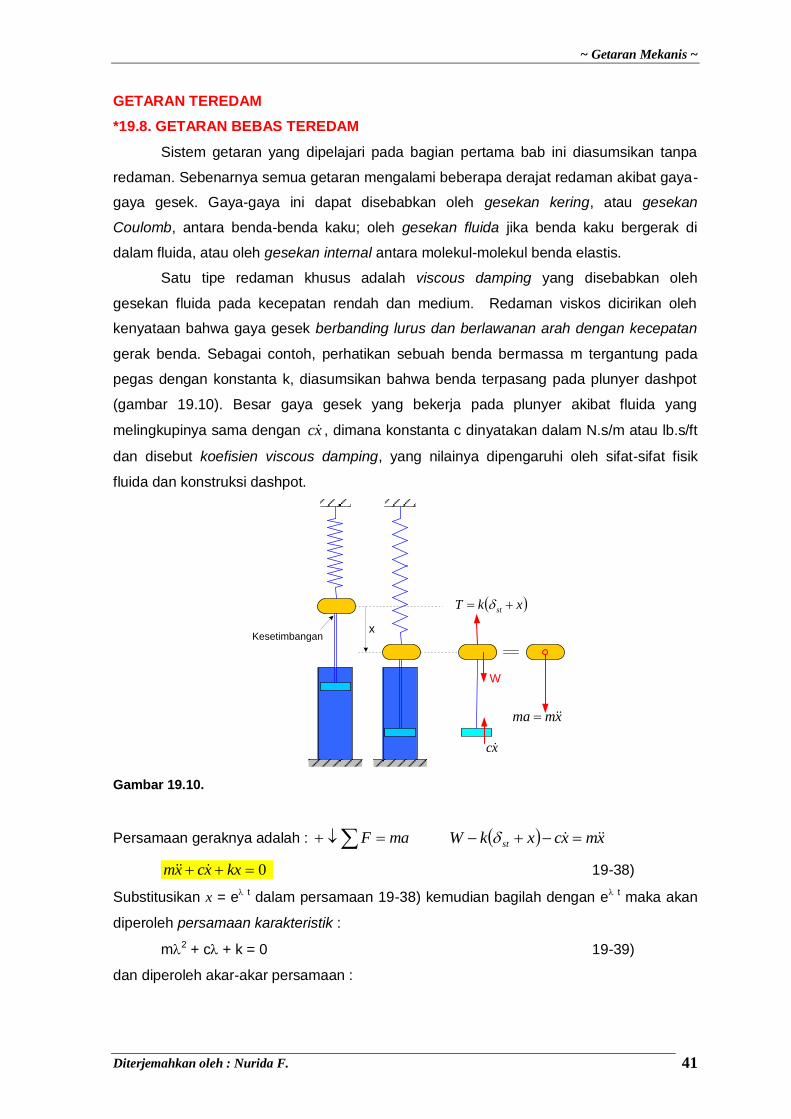
kenyataan bahwa gaya gesek berbanding lurus dan berlawanan arah dengan kecepatan
gerak benda. Sebagai contoh, perhatikan sebuah benda bermassa m tergantung pada
pegas dengan konstanta k, diasumsikan bahwa benda terpasang pada plunyer dashpot
(gambar 19.10). Besar gaya gesek yang bekerja pada plunyer akibat fluida yang
melingkupinya sama dengan xc , dimana konstanta c dinyatakan dalam N.s/m atau lb.s/ft
dan disebut koefisien viscous damping, yang nilainya dipengaruhi oleh sifat-sifat fisik
fluida dan konstruksi dashpot.
Kesetimbanganx
W
xkT st
xmma
xc
Gambar 19.10.
Persamaan geraknya adalah : maF xmxcxkW st
0 kxxcxm 19-38)
Substitusikan x = e t dalam persamaan 19-38) kemudian bagilah dengan e t maka akan
diperoleh persamaan karakteristik :
m2 + c + k = 0 19-39)
dan diperoleh akar-akar persamaan :

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 42
m
k
m
c
m
c
2
22 19-40)
Didefinisikan koefisien redaman kritis cc sebagai nilai yang menyebabkan suku di bawah
akar pada persamaan 19-40) sama dengan nol, yaitu :
02
2
m
k
m
cc nc mm
kmc 22 19-41)
dimana n adalah frekuensi putar natural dari sistem tanpa redaman. Kita dapat memilah
3 jenis kasus redaman berdasarkan nilai koefisien c yaitu :
1. Heavy damping : c > cc; Akar persamaan karakteristik 19-39) 1 dan 2 adalah nyata
dan berbeda. Penyelesaian umum dari persamaan diferensial 19-38) adalah :
tteCeCx 21
21
19-42)
Penyelesaian ini berhubungan dengan gerakan tanpa getaran. Pada saat 1 dan 2
bernilai negatif kedua-duanya, x mendekati nol pada saat t meningkat tak terhingga.
Bagaimanapun pada kenyataannya sistem akan mencapai posisi keseimbangannya
setelah beberapa waktu tertentu.
2. Critical damping : c = cc; Persamaan karakteristik 19-39) memiliki akar ganda bernilai
= - cc / 2m. Penyelesaian umum untuk persamaan diferensial 19-38) adalah :
tnetCCx
)( 21 19-43)
Gerakan yang terjadi juga tanpa getaran. Sistem teredam kritis merupakan satu
bahasan khusus dalam rekayasa teknik untuk mendapatkan kondisi dimana sistem
dapat mencapai posisi keseimbangannya dalam waktu sesingkat mungkin tanpa
mengalami osilasi.
3. Light damping : c < cc; Akar-akar persamaan 19-39) merupakan bilangan kompleks
sekawan (conjugate complex). Penyelesaian umum untuk persamaan diferensial 19-
38) berbentuk :
)cossin( 21
)2/( tCtCex dd
tmc 19-44)
dimana d dirumuskan sebagai :
2
2
2
m
c
m
kd
Substitusikan 2/ nmk dan merujuk persamaan 19-41), diperoleh :
2
1
c
ndc
c 19-45)

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 43
Dalam hal ini konstanta c/cc dinamakan faktor damping. Meskipun gerakan yang
terjadi pada kenyataannya tidak bolak-balik sendiri, konstanta d umumnya dianggap
sebagai frekuensi putar getaran teredam. Dengan menggunakan metode substitusi
yang sama dengan sub bab 19.2 akan diperoleh penyelesaian umum persamaan 19-
38) dalam bentuk :
)sin()2/( texx d
tmc
o 19-46)
Gerakan yang didefinisikan oleh persamaan 19-46) adalah getaran dengan amplitudo
yang melemah (gambar 19.11) dan interval waktu d = 2 / d memisahkan dua titik
yang berurutan dimana kurva yang didefinisikan oleh persamaan 19-46) menyinggung
satu dari kurva pembatas sebagaimana tampak pada gambar 19.11, biasanya disebut
sebagai periode getaran teredam. Mengacu pada persamaan 19-45) terlihat bahwa d
< n sehingga d lebih besar dari periode getaran n dari sistem getaran tanpa
redaman yang bersesuaian.
x
x0
0
-x0
t1
x1
t2
x2
t3
x3
x4
t4
d
tmc
ex 2
0
t
Gambar 19.11.
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 44
*19.9. GETARAN PAKSA TEREDAM
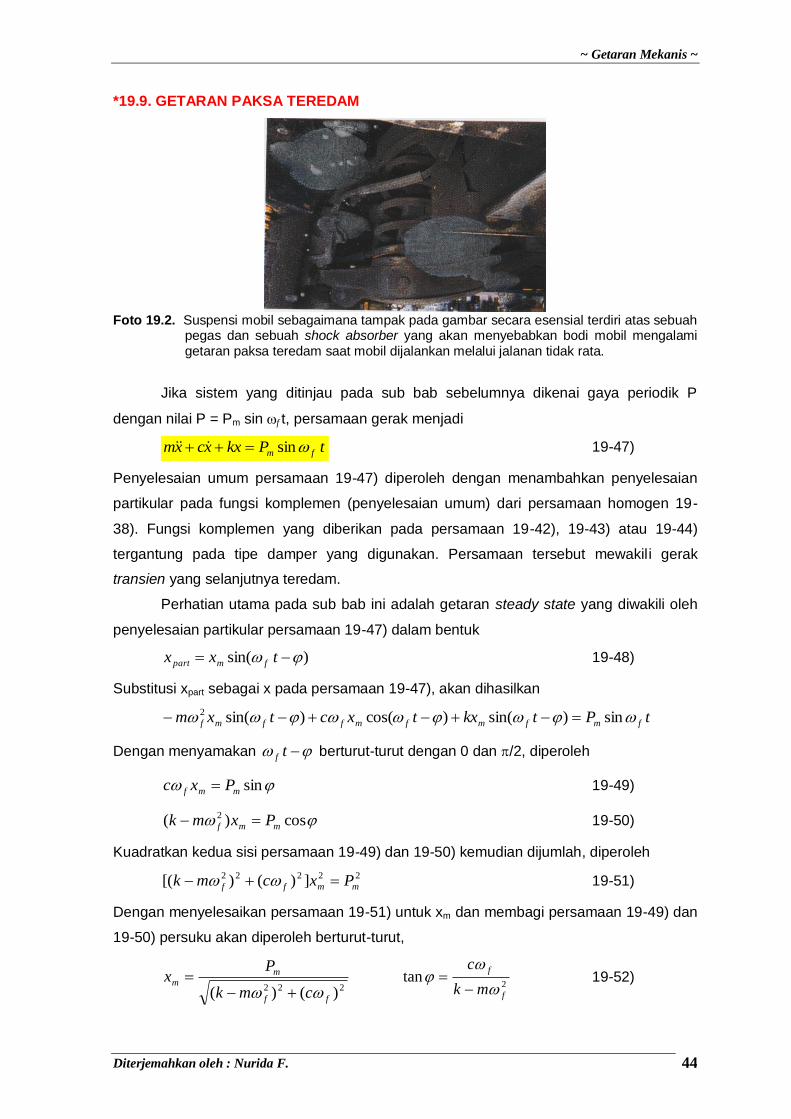
Foto 19.2. Suspensi mobil sebagaimana tampak pada gambar secara esensial terdiri atas sebuah
pegas dan sebuah shock absorber yang akan menyebabkan bodi mobil mengalami getaran paksa teredam saat mobil dijalankan melalui jalanan tidak rata.
Jika sistem yang ditinjau pada sub bab sebelumnya dikenai gaya periodik P
dengan nilai P = Pm sin f t, persamaan gerak menjadi
tPkxxcxm fm sin 19-47)
Penyelesaian umum persamaan 19-47) diperoleh dengan menambahkan penyelesaian
partikular pada fungsi komplemen (penyelesaian umum) dari persamaan homogen 19-
38). Fungsi komplemen yang diberikan pada persamaan 19-42), 19-43) atau 19-44)
tergantung pada tipe damper yang digunakan. Persamaan tersebut mewakili gerak
transien yang selanjutnya teredam.
Perhatian utama pada sub bab ini adalah getaran steady state yang diwakili oleh
penyelesaian partikular persamaan 19-47) dalam bentuk
)sin( txx fmpart 19-48)
Substitusi xpart sebagai x pada persamaan 19-47), akan dihasilkan
tPtkxtxctxm fmfmfmffmf sin)sin()cos()sin(2
Dengan menyamakan tf berturut-turut dengan 0 dan /2, diperoleh
sinmmf Pxc 19-49)
cos)( 2
mmf Pxmk 19-50)
Kuadratkan kedua sisi persamaan 19-49) dan 19-50) kemudian dijumlah, diperoleh
22222 ])()[( mmff Pxcmk 19-51)
Dengan menyelesaikan persamaan 19-51) untuk xm dan membagi persamaan 19-49) dan
19-50) persuku akan diperoleh berturut-turut,
222 )()( ff
mm
cmk
Px
2tan
f
f
mk
c
19-52)
~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 45
Mengacu pada persamaan 19-4) bahwa 2
nmk , dimana n adalah frekuensi putar
getaran bebas tidak teredam, dan dari persamaan 19-41) bahwa 2mn = cc, dimana cc
adalah koefisien damping kritis dari sistem, diperoleh
222 )]/)(/(2[])/(1[
1
nfcnfm
m
m
m
cc
x
kP
x
19-53)
2)/(1
)/)(/(2tan
nf
nfccc
19-54)
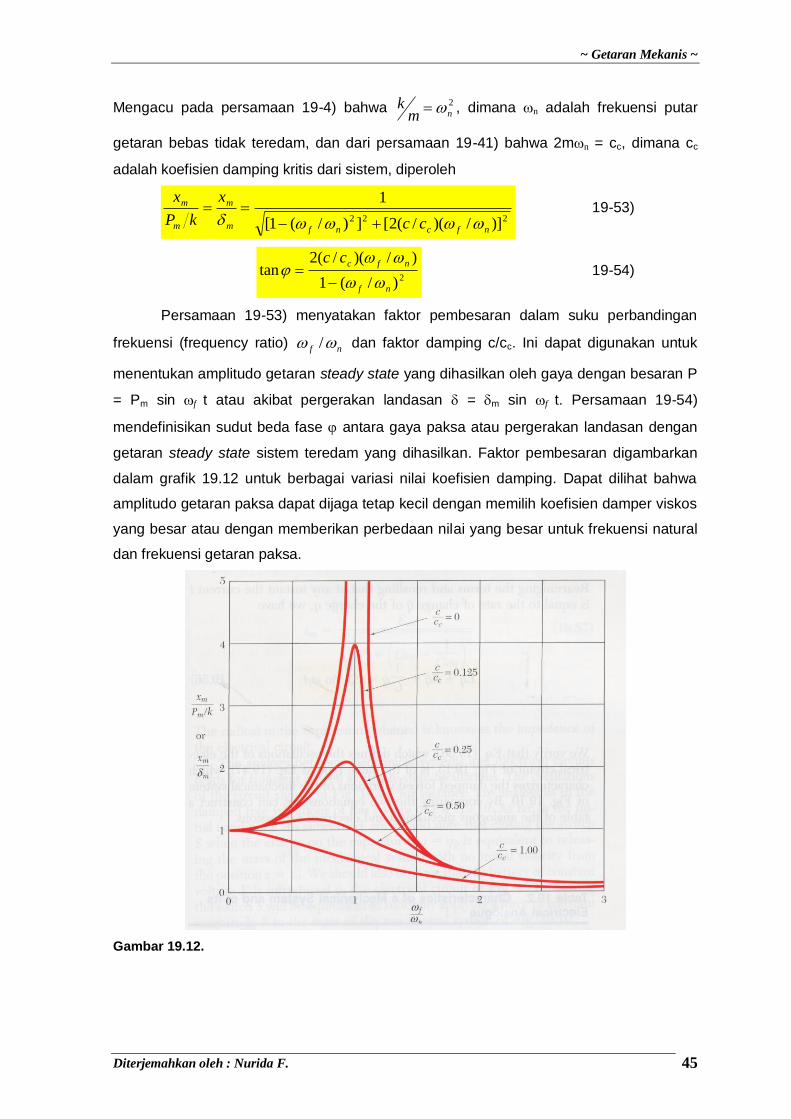
Persamaan 19-53) menyatakan faktor pembesaran dalam suku perbandingan
frekuensi (frequency ratio) nf / dan faktor damping c/cc. Ini dapat digunakan untuk
menentukan amplitudo getaran steady state yang dihasilkan oleh gaya dengan besaran P
= Pm sin f t atau akibat pergerakan landasan = m sin f t. Persamaan 19-54)
mendefinisikan sudut beda fase antara gaya paksa atau pergerakan landasan dengan
getaran steady state sistem teredam yang dihasilkan. Faktor pembesaran digambarkan
dalam grafik 19.12 untuk berbagai variasi nilai koefisien damping. Dapat dilihat bahwa
amplitudo getaran paksa dapat dijaga tetap kecil dengan memilih koefisien damper viskos
yang besar atau dengan memberikan perbedaan nilai yang besar untuk frekuensi natural
dan frekuensi getaran paksa.
Gambar 19.12.

~ Getaran Mekanis ~
Diterjemahkan oleh : Nurida F. 46
*19.10. ANALOGI ELEKTRIK
Gerak bolak-balik sirkuit elektrik dinyatakan dalam persamaan diferensial yang
setipe dengan persamaan yang diperoleh pada sub bab sebelumnya. Karena itu
analisisnya mirip dengan sistem mekanis dan hasil yang diperoleh untuk sistem getaran
dapat digunakan untuk sirkuit yang ekuivalen. Sebaliknya, setiap hasil yang diperoleh
untuk sirkuit elektris juga dapat diaplikasikan untuk sistem mekanis yang bersesuaian.
Bayangkan satu sirkuit elektris yang terdiri atas satu induktor dengan induktansi L,
sebuah resistor dengan resistansi R dan kapasitor dengan kapasitansi C, yang
dihubungkan secara seri dengan sumber tegangan bolak-balik E = Em sin f t (gb. 19.13).
Dari teori sirkuit dasar dinyatakan bahwa jika i adalah arus yang mengalir dalam sirkuit
dan q menyatakan isian elektrik dalam kapasitor, penurunan potensial adalah L(di / dt)
pada induktor, Ri pada resistor dan q/C pada kapasitor. Jika dinyatakan bahwa jumlah
tegangan terpakai dan penurunan potensial pada loop sirkuit sama dengan nol, maka
0sin C
qRi
dt
diLtE fm 19-55)
Pengaturan ulang suku-suku persamaan dengan mengingat bahwa pada setiap kondisi i
sama dengan laju perubahan