Capítulo 7 N GDL Def Para Aeronáuticos
46
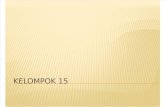
1 Capítulo 7 INTRODUCCIÓN A LOS SISTEMAS DE N GRADOS DE LIBERTAD 7.1 INTRODUCCIÓN Hasta ahora se ha analizado el comportamiento de los sistemas de un grado de libertad. Se ha comprobado que muchos sistemas reales se pueden modelar con buena aproximación mediante sistemas de un sólo grado de libertad. Si embargo, hay casos en que esto no es posible. Por ejemplo, en los sistemas formados por varios sólidos rígidos unidos por elementos elásticos, como los mostrados en la figura 7.1. En esos casos, excepto en condiciones de movimiento muy concretas, el estudio del comportamiento de los sistemas no puede hacerse con modelos tan simples como los de un grado de libertad utilizados hasta ahora. k 1 k 3 k 2 c 1 c 3 c 2 m 2 m 1 k 1 k 2 k 4 k 3 m 2 m 1 O R Mt () I O Cable inextensible Rodadura sin deslizamiento Ft () c k 1 k 2 k 3 c R I O Cable inextensible m 2 m 1 l O Figura 7.1
-
Upload
sskinner92 -
Category
Documents
-
view
227 -
download
4
description
Capítulo que explica sistemas de N grados de libertad, y cómo resolverlos de manera general.
Transcript of Capítulo 7 N GDL Def Para Aeronáuticos
-
1
Captulo 7
INTRODUCCIN A LOS SISTEMAS DE N GRADOS DE LIBERTAD
7.1 INTRODUCCIN
Hasta ahora se ha analizado el comportamiento de los sistemas de un grado de libertad. Se ha comprobado que muchos sistemas reales se pueden modelar con buena aproximacin mediante sistemas de un slo grado de libertad. Si embargo, hay casos en que esto no es posible. Por ejemplo, en los sistemas formados por varios slidos rgidos unidos por elementos elsticos, como los mostrados en la figura 7.1. En esos casos, excepto en condiciones de movimiento muy concretas, el estudio del comportamiento de los sistemas no puede hacerse con modelos tan simples como los de un grado de libertad utilizados hasta ahora.
k1 k3k2
c1 c3c2 m2m1
k1 k2
k4
k3
m2
m1 OR
M t( )
IO
Cable inextensible
Rodadura sin deslizamiento
F t( )
c
k1
k2 k3
c
RIO
Cable inextensiblem2
m1
l
O
Figura 7.1
-
2
Tambin hay muchas ocasiones en que los sistemas continuos no pueden ser aproximados mediante sistemas de un grado de libertad, suponiendo una deformada del sistema al vibrar. Esto ocurre, ya sea por la geometra compleja del sistema o por la distribucin y frecuencia de las cargas aplicadas. En esos casos el comportamiento de los sistemas debe estudiarse con modelos de un nmero ms alto de grados de libertad. Para unos sistemas sern suficientes modelos de varios grados de libertad, mientras que para otros los modelos deben tener cientos de ellos, o incluso miles. La complejidad del modelo necesario depender de la complejidad de la geometra y las cargas aplicadas y de las frecuencias de estas ltimas. Ejemplos simples son los de la figura 7.2. La viga en voladizo sometida a las fuerzas representadas tender a vibrar con una deformada muy diferente a las generalmente supuestas cuando se hacen modelos de un grado de libertad. Adems, su deformada variar dependiendo de las amplitudes y frecuencias de las fuerzas aplicadas. Si slo estuviera aplicada la fuerza F1(t) y su frecuencia fuera superior a la frecuencia natural obtenida con el modelo de un grado de libertad, tampoco sera vlido el modelo de un grado de libertad empleado. Algo similar ocurre en el caso del prtico sometido a las fuerzas representadas en la figura 7.2.
F t1( )
F t2( )F t1( )
F t2( )
Figura 7.2
El comportamiento de los sistemas lineales con un nmero finito de grados de libertad puede representarse mediante un sistema de ecuaciones diferenciales lineales de segundo orden. El nmero de ecuaciones ser igual al de grados de libertad del sistema. En el caso de vibraciones libres, se tendr un sistema de ecuaciones homogneas, de cuya solucin se obtendr un nmero de frecuencias naturales igual al de grados de libertad del sistema mecnico. Como se ver posteriormente, similarmente al comportamiento de los sistemas de un grado de libertad, los de N grados de libertad tienden a vibrar libremente a las frecuencias naturales. A cada una de las frecuencias naturales el sistema vibrar con una deformada determinada. A esas deformadas se les denomina modos naturales de vibracin. Dependiendo de las condiciones iniciales, el sistema vibrar a una u otra frecuencia natural, y por tanto con una u otra configuracin. Tambin puede ocurrir, y es lo ms frecuente, que las condiciones iniciales sean tales que el sistema tienda a vibrar con varias frecuencias naturales simultneamente y con una deformada que sea combinacin de los modos naturales de vibracin.
El planteamiento de las ecuaciones del movimiento de los sistemas de N grados de libertad se puede realizar empleando las mismas tcnicas que se han aplicado para los sistema
-
3
de un grado de libertad. En los casos ms simples es fcil la obtencin de las ecuaciones del movimiento a partir de las ecuaciones de equilibrio de los distintos cuerpos. En otros casos es ms conveniente el uso de los mtodos basados en la dinmica analtica. Estos procedimientos y otros derivados de ellos se emplearn para plantear las ecuaciones en diferentes sistemas en este captulo.
En este captulo se van a plantear las ecuaciones del movimiento de sistemas discretos, formados por conjuntos de slidos rgidos unidos por elementos elsticos y amortiguadores, ambos de masas despreciables, y sometidos a diferentes tipos de excitaciones. Adems, se analizar la respuesta de sistemas discretos en vibracin libre y forzada, con y sin amortiguamiento.
7.2 ECUACIN DEL MOVIMIENTO
Quizs el caso ms simple de sistema de varios grados de libertad con amortiguamiento sea el de 2 grados de libertad de la figura 7.3. El sistema est formado por dos masas, m1 y m2, con el movimiento permitido slo en la direccin x, unidas por resortes y amortiguadores y sometidas a unas fuerzas externas F1 (t) y F2 (t).
FEFE 1 2FA1 FA2
FI
F1
1
k1 k3k2
c1 c3c2 m2m1
x1
F1
x2
F2
FE3FA3
FI 2
F2FE2FA2
*
*
Figura 7.3
Definiendo las posiciones x1 y x2 como coordenadas independientes del sistema (generalizadas), las ecuaciones del movimiento pueden obtenerse a partir del equilibrio de cada una de las masas.
Para la masa m1, se puede escribir
0121211 tFFFFFF EEAAI (7.1)
Donde
111 xmFI (7.2)
111 xcFA (7.3)
-
4
2122 xxcFA (7.4)
111 xkFE (7.5)
2122 xxkFE (7.6)
Sustituyendo las ecuaciones anteriores en la (7.1) y reagrupando trminos se obtiene:
tFxkxkkxcxccxm 1221212212111 (7.7)
Igualmente, para la masa m2 se puede escribir
02** 32322 tFFFFFF EEAAI (7.8)
Donde
222 xmFI (7.9)
122*2 xxcFA (7.10)
333 xcFA (7.11)
122*2 xxkFE (7.12)
233 xkFE (7.13)
Sustituyendo en la ecuacin (7.8) y reagrupando trminos se obtiene la otra ecuacin del movimiento:
tFxkkxkxccxcxm 2232122321222 (7.14)
Las ecuaciones anteriores pueden escribirse en forma matricial:
tFtF
xx
kkkkkk
xx
cccccc
xx
mm
2
1
2
1
322
221
2
1
322
221
2
1
2
1
00
(7.15)
o, de forma ms simple:
tFxkxcxm (7.16)
Donde las matrices m , c y k son las matrices de masa, amortiguamiento y rigidez, respectivamente. Los vectores x , x y x son los vectores de aceleracin, velocidad y posicin, respectivamente, y tF el vector de fuerza.
Como se ve, la ecuacin resultante, (7.15), es un sistema de dos ecuaciones diferenciales lineales de segundo orden. Dicho sistema de ecuaciones permite determinar la respuesta del sistema de la figura 7.3 a cualquier excitacin, representada por el vector de fuerzas. Analizando las ecuaciones puede comprobarse que estn acopladas, de forma que el movimiento de m1 influye sobre el de m2 y viceversa. Por tanto, la determinacin de los movimientos requiere la solucin simultnea de las dos ecuaciones. En cualquier caso, para
-
5
obtener la respuesta ser necesario conocer tambin las condiciones iniciales, representadas por los valores de los vectores de posicin y velocidad en el instante inicial. En apartados posteriores se ver la forma de resolver el sistema de ecuaciones anterior, ante diferentes condiciones de excitacin.
Igual que se ha obtenido la ecuacin del movimiento del sistema de dos grados de libertad de la figura 7.3, puede obtenerse la de un sistema con un nmero ms alto de grados de libertad. En el caso de un sistema genrico formado por N masas, como el de la figura 7.4, la ecuacin del movimiento puede obtenerse siguiendo un procedimiento similar.
k1
c1 m1
k3k2
c3c2 m2...... cj cncj+1 cn+1
mj mn
kj knkj+1 kn+1......
... ...
x1
F1
x2
F2
xj
Fj
xn
Fn
FEFE 1 2FA1 FA2
FI
F1
1
FEFE j j+ 1FAj FAj+ 1
FI j
Fj
*
*
Figura 7.4
Se pueden plantear tantas ecuaciones de equilibrio como masas tiene el sistema. La primera ecuacin ser igual a la (7.7). La correspondiente a la ltima masa, mn, ser igual a la ecuacin (7.14), sustituyendo el subndice 2 por n, el 3 por n+1 y el 1 por n-1. Una ecuacin genrica, la correspondiente a la masa mj, se puede plantear a partir del equilibrio de de la masa:
011
**
tFFFFFF jEEAAI jjjjj (7.17)
Donde
jjI xmF j (7.18)
1* jjjA xxcF j (7.19) 111 jjjA xxcF j (7.20)
1* jjjE xxkF j (7.21) 111 jjjE xxkF j (7.22) Sustituidas estas ecuaciones en la (7.17) y agrupando trminos se obtiene una ecuacin genrica del sistema de ecuaciones que define el movimiento:
-
6
tFxkxkkxkxcxccxcxm jjjjjjjjjjjjjjjjj 11111111 (7.23) A partir de las ecuaciones primera y ltima y de una ecuacin genrica puede obtenerse el
sistema completo de ecuaciones:
tFxkxcxm (7.24)
Donde la matriz m es diagonal y las matrices c y k son simtricas, todas ellas de dimensin n.
Puede comprobarse que en general la matriz m no tiene que ser diagonal, pero s simtrica. De las propiedades de la energa cintica de los sistemas mecnicos, puede comprobarse que la matriz de masa ser simtrica y definida positiva. Igualmente, del principio de reciprocidad puede comprobarse que en general la matriz k ser simtrica. Tambin puede comprobarse a partir de las propiedades de la energa de deformacin que dicha matriz ser definida positiva o semidefinida positiva, dependiendo del caso bajo estudio. En este ltimo caso sern posibles movimientos de slido rgido en el sistema.
7.2.1 Aplicacin de las ecuaciones de Lagrange
El planteamiento de las ecuaciones del movimiento puede hacerse tambin mediante la aplicacin de las ecuaciones de Lagrange. Para sistemas de N gdl, estas ecuaciones pueden escribirse:
jjjj
QqF
qL
qL
dtd
j = 1, ... , n (7.25)
Donde L = T V, es el lagrangiano, F es la funcin de disipacin de Rayleigh, qj son las coordenadas generalizadas y Qj las fuerzas generalizadas asociadas a las coordenadas qj.
Las fuerzas generalizadas pueden obtenerse teniendo en cuenta que el trabajo virtual producido por todas las fuerzas puede expresarse en funcin de las fuerzas generalizadas mediante la expresin
1
n
j jj
W Q q
(7.26)
En general, para cualquier sistema de fuerzas Fl aplicadas en v puntos l con posibles desplazamientos virtuales rl , el trabajo virtual de las fuerzas puede expresarse:
v
lll rFW
1 (7.27)
Expresados los desplazamientos virtuales, rl, en funcin de las coordenadas generalizadas:
n
jj
j
ll qq
rr1
, (7.28)
-
7
el trabajo virtual puede escribirse:
v
l
n
j
n
j
v
lj
j
ljj
j
ll qq
rFqqrFW
1 1 1 1 (7.29)
Teniendo en cuenta la ecuacin (7.26), se comprueba fcilmente que las fuerzas generalizadas pueden expresarse mediante la ecuacin
v
l j
llj q
rFQ1
(7.30)
En un sistema como el de la figura 7.4, con coordenadas generalizadas, xj, las funciones T, V y F pueden expresarse:
n
jjj xmT
1
2
21
(7.31)
1
1
212
1 n
jjjj xxkV (7.32)
1
1
212
1 n
jjjj xxcF (7.33)
Con x0 = xn+1 = 0 y 010 nxx .
Aplicando la ecuacin (7.30), es fcil determinar la expresin de la fuerzas generalizadas:
jj FQ (7.34)
Aplicadas las ecuaciones (7.31) a (7.33) al sistema de la figura 7.3, que es una particularizacin con dos grados de libertad del sistema de la figura 7.4, se obtienen las ecuaciones
22221121 xmxmT (7.35)
2332122211 21
21
21 xkxxkxkV (7.36)
2332122211 21
21
21 xcxxcxcF (7.37)
Sustituidas estas expresiones, junto con la (7.34), en las ecuaciones de Lagrange y efectuando, se obtienen fcilmente las ecuaciones del movimiento (7.7) y (7.14):
tFxkxkkxcxccxm 1221212212111 (7.7)
tFxkkxkxccxcxm 2232122321222 (7.14)
-
8
Igualmente, sustituyendo directamente las ecuaciones (7.31) a (7.34) en la (7.25) y operando, se obtiene la ecuacin (7.23), que es una ecuacin genrica del sistema de la figura 7.4.
7.2.2 Clculo de los trminos de las matrices
Hasta ahora se ha visto la forma de plantear la ecuacin del movimiento de los sistemas de N gdl, ya sea planteando las ecuaciones de equilibrio o mediante la utilizacin de las ecuaciones de Lagrange. Con estos mtodos se ha visto que se pueden obtener los trminos de las matrices del sistema de ecuaciones resultante. A continuacin se va a presentar otro procedimiento que puede emplearse en los sistemas lineales, que permite determinar directamente los coeficientes de las matrices. El procedimiento permite tambin obtener una interpretacin fsica de las ecuaciones obtenidas.
Si en la ecuacin del movimiento
tFxkxcxm (7.16)
se hacen nulos los vectores de velocidad y aceleracin, 0x y 0x , queda la ecuacin que rige el problema esttico
tFxk (7.38) que puede tambin escribirse
n
llili xkF
1 (7.39)
Haciendo nulos todos los desplazamientos, xl, excepto uno, xj, se obtiene:
iji kF 10
j
l
xjlx
(7.40)
A partir de esta ecuacin se puede decir que los trminos kij de la matriz de rigidez representan la fuerza que hay que aplicar en el grado de libertad i para obtener un desplazamiento unidad en el grado de libertad j y cero en el resto.
Otra forma de llegar a la misma conclusin es particularizando la ecuacin (7.38) para el caso en que todos los desplazamientos sen nulos, excepto uno, que se hace igual a la unidad:
n
j
i
F
FF
F
k
1
010
0
(7.41)
Esta ecuacin representa una situacin en la que se aplica al sistema un vector de fuerzas tal que hace nulos todos los desplazamientos, excepto xj, que es la unidad. En este caso, la
-
9
columna j de la matriz de rigidez ser igual al vector de fuerzas aplicado. Es decir, la columna j de la matriz de rigidez, kij, representa el conjunto de fuerzas, Fi, que hay que aplicar para hacer nulos todos los desplazamientos, excepto xj, que se hace igual a la unidad.
Empleando este procedimiento, es decir, determinando las fuerzas necesarias para producir desplazamientos unitarios y nulos en los distintos grados de libertad, pueden determinarse los coeficientes de la matriz de rigidez con relativa facilidad en muchos casos. Sin embargo, a veces no es tan fcil y es ms simple determinar los desplazamientos producidos por fuerzas unitarias. En ese caso puede emplearse un procedimiento alternativo. Multiplicando por 1k , la ecuacin (7.38), puede transformarse en
Fax (7.42)
Donde 1 ka es la matriz de flexibilidad. Esta ecuacin puede escribirse tambin
n
jjiji Fax
1 (7.43)
Haciendo unidad uno slo de los trminos del vector de fuerzas, Fj, y cero el resto, el trmino aij representa el desplazamiento en el grado de libertad i, xi, cuando se aplica una fuerza unidad en el grado de libertad j, Fj, siendo nulas el resto de las fuerzas. Invirtiendo la matriz de flexibilidad as calculada se obtiene la matriz de rigidez.
Igualmente, si en la ecuacin del movimiento se hacen nulos los vectores de desplazamiento y velocidad, 0x y 0x , queda la ecuacin
tFxm (7.44) que puede tambin escribirse
n
llili xmF
1 (7.45)
Haciendo nulos todas las aceleraciones, lx , excepto una, jx , se obtiene:
iji mF 10
j
l
xjlx
(7.46)
A partir de esta ecuacin se puede decir que los trminos mij de la matriz de masa representan la fuerza que hay que aplicar en el grado de libertad i para obtener una aceleracin unidad en el grado de libertad j y cero en el resto.
De otra forma, puede plantearse la ecuacin matricial (7.44) particularizada para las aceleraciones definidas en (7.46):
-
10
10
010
i
j
n
F
Fm
F
F
(7.47)
Con lo que se puede decir que la columna j de la matriz de masa, mij, representa el conjunto de fuerzas, Fi, que hay que aplicar para hacer nulas todas las aceleraciones, excepto jx , que
se hace igual a la unidad.
Siguiendo un proceso similar pueden determinarse los trminos de la matriz de amortiguamiento, en caso de sistemas con amortiguamiento viscoso. Un trmino genrico cij de la matriz de amortiguamiento representa la fuerza que hay que aplicar en el grado de libertad i para obtener una velocidad unidad en el grado de libertad j y cero en el resto. Y la columna i de la matriz de amortiguamiento representa el conjunto de fuerzas, Fi, que hay que aplicar para hacer nulas todas las velocidades, excepto jx , que se hace igual a la
unidad.
Ejemplo.
La figura 7.5 muestra un ejemplo de sistema de dos grados de libertad con movimiento plano. En el sistema solo se produce movimiento vertical, x, y de cabeceo, . Los datos necesarios para el planteamiento de las ecuaciones se muestran en la figura. Para el planteamiento de las ecuaciones del movimiento se van a emplear x y como coordenadas generalizadas. Donde x representa el desplazamiento vertical del centro de gravedad, G, y el giro de la masa. A partir de ellas, bajo la hiptesis de pequeos movimientos, pueden definirse los movimientos de los puntos A y B de fijacin de los resortes:
axxA (7.48) bxxB (7.49)
La ecuacin del movimiento puede obtenerse por distintos procedimientos: mediante el planteamiento de las ecuaciones de equilibrio, utilizando las ecuaciones de Lagrange o determinando directamente los coeficientes de las matrices de masa y rigidez.
k1k2
x
k1 k2
x
G m, IG
a bxA xB
Figura 7.5
-
11
Ecuaciones de equilibrio
Mediante las ecuaciones de equilibrio, habr que plantear las ecuaciones correspondientes a los equilibrios de fuerzas verticales y de momentos alrededor del centro de gravedad, G (figura 7.6).
xFAFB
FI
MI
Figura 7.6
Las fuerzas verticales que intervienen son
axkxkF AA 11 (7.50)
bxkxkF BB 22 (7.51)
xmFI (7.52)
Haciendo que la suma de fuerzas sea nula, se obtiene:
021 bkaxkxmFFFF BAI , (7.53) que tambin puede expresarse:
01221 akbkxkkxm (7.54)
Igualmente, los momentos alrededor del centro de gravedad de la masa son
aaxkaFM AA 1 (7.55)
bbxkbFM BB 2 (7.56)
GI IM (7.57)
Planteando el equilibrio de momentos se obtiene:
021 bxbkaxakIMMMM GIBA , (7.58) que puede expresarse tambin:
0222112 bkakxakbkIG (7.59) La ecuacin matricial del movimiento ser, por tanto:
00
02
22
112
1221
x
bkakakbkakbkkkx
Im
G
(7.60)
-
12
Ecuaciones de Lagrange
La energa cintica del sistema durante la vibracin puede escribirse:
2221
21 GIxmT , (7.61)
y la potencial:
22212221 21
21
21
21 bxkaxkxkxkV BA (7.62)
Sustituyendo las expresiones anteriores en la ecuacin (7.25) particularizada para cada una de la dos coordenadas generalizadas, x y , y operando, es fcil obtener las ecuaciones
021 bxkaxkxm (7.63)
021 bxbkaxakIG , (7.64)
que en forma matricial puede expresarse:
00
02
22
112
1221
x
bkakakbkakbkkkx
Im
G
(7.65)
Clculo directo de los trminos de las matrices
Considerando nulas las velocidades y aceleraciones, pueden determinarse los trminos de la matriz de rigidez. Ante un desplazamiento unidad, x = 1, con giro nulo, = 0, los movimientos xA y xB son:
1 BA xx (7.66)
Las fuerzas necesarias para producir ese movimiento son:
2121111 kkxkxkkF BA (7.67)
akbkbxkaxkkMF BA 1221212 (7.68)
Donde la fuerza generalizada es un momento, al estar asociada a una coordenada generalizada de giro.
Dando un giro, , unidad y desplazamiento, x, nulo, los desplazamientos xA y xB son:
axA (7.69)
bxB (7.70)
Las fuerzas necesarias para ello son:
bkakxkxkkF BA 2121121 (7.71)
222
121222 bkakbxkaxkkMF BA (7.72)
-
13
Con lo que se obtiene la misma matriz de rigidez que antes:
22
2112
1221
bkakakbkakbkkk
k (7.73)
Para el clculo de la matriz de masa, se consideran nulos los desplazamientos y las velocidades. En esas condiciones, las fuerzas necesarias para conseguir aceleracin unidad del centro de gravedad G, 1x , y nula la aceleracin angular del elemento, 0 , son:
mmF 111 (7.74)
0212 mMF
Las fuerzas necesarias para conseguir aceleracin nula del centro de gravedad, 0x , y aceleracin angular unidad, 1 , son:
0121 mF (7.75)
GImMF 222 (7.76)
Con lo que la matriz queda:
GIm
m0
0 (7.76)
7.3 CAMBIO DE COORDENADAS
En el ejemplo anterior se ha obtenido una ecuacin del movimiento en la que la matriz de masa es diagonal, pero no la matriz de rigidez. En ese caso se dice que existe acoplamiento elstico entre las ecuaciones, ya que son los trminos de la matriz de rigidez los que provocan el acoplamiento. Analizando la matriz de rigidez, puede comprobarse que ser diagonal cuando se cumpla la condicin k1 a = k2 b, pero esto no tiene por qu ocurrir en general.
En el modelo anterior se pueden elegir unas nuevas coordenadas generalizadas, x1 y , como las de la figura 7.7. En este caso, la coordenada x1 representa el desplazamiento de un punto O, cuya posicin se ha elegido de forma que se cumpla la condicin k1 a1 = k2 b2.
k1 k2
x1O G
m, IGe
a1 b1
Figura 7.7
-
14
La relacin entre la coordenada x1 y x, y de la figura 6.5 es:
exx 1 (7.77)
Igualmente, las relaciones entre a y a1, y b y b1 son:
eaa 1 (7.78)
ebb 1 (7.79)
Poniendo las expresiones de las energas cintica y potencia en funcin de las nuevas coordenadas generalizadas se tiene:
221 21
21 GIexmT , (7.80)
y la potencial:
211221112221 21
21
21
21 bxkaxkxkxkV BA (7.81)
Sustituyendo las expresiones anteriores en la ecuacin (7.25) particularizada para cada una de la dos coordenadas generalizadas, x1 y , y operando, es fcil obtener las ecuaciones
01121111 bxkaxkmexm (7.82)
01112111121 bxbkaxakmeIxme G , (7.83)
que en forma matricial puede expresarse:
01212
2111112
11122112
xbkakakbkakbkkkx
meImemem
G
(7.84)
Teniendo en cuenta que k1 a1 = k2 b2, la ecuacin queda de la forma
00
0 12
12211
2112
xbkak
kkxmeIme
mem
G
(7.85)
Comprobndose ahora que la matriz de rigidez es diagonal, no siendo as la de masa. Es decir, el acoplamiento entre las ecuaciones es a travs de la matriz de masa; es la que se llama un acoplamiento inercial.
Otra posibilidad habra sido tomar como coordenadas generalizadas xA y xB. En ese caso, teniendo en cuenta que se est empleando la hiptesis de pequeos movimientos, la relacin entre las coordenadas es (figura 7.5)
l
axbxbaaxbxx BABA
(7.86)
l
xxbaxx ABAB
(7.87)
-
15
Donde l = a + b. Por otro lado, las energas cintica y potencial pueden escribirse:
22
21
21
lxxI
lxaxbmT BAGBA
, (7.88)
y la potencial:
222
1 21
21
BA xkxkV (7.89)
Aplicando las ecuaciones de Lagrange, es fcil comprobar que se llega a la ecuacin
00
0
2
1
2
2
2
22
2
B
A
B
A
GG
GG
xx
kk
xx
lIma
lIabm
lIabm
lImb
(7.90)
Expresando IG en funcin de la masa:
2mrIG , (7.91)
donde r es el radio de inercia, puede comprobarse que si se cumple la condicin r = a b, las ecuaciones del movimiento estn desacopladas y pueden, por tanto, resolverse independientemente una de otra.
En general, las ecuaciones del movimiento de los sistemas lineales de N gdl, no amortiguados, estarn acopladas. Dependiendo del sistema de coordenadas generalizadas empleado, el acoplamiento ser a travs de una matriz u otra, o de las dos. Sin embargo, puede comprobarse, y se ver posteriormente, en los sistemas lineales no amortiguados es siempre posible encontrar un sistema de coordenadas tal que las ecuaciones estarn desacopladas. Dichas coordenadas se denominan coordenadas naturales o coordenadas normales.
7.4 VIBRACIONES LIBRES DE SISTEMAS DE DOS GRADOS DE LIBERTAD SIN AMORTIGUAMIENTO
Si en el sistema de la figura 7.3 se elimina el amortiguamiento y se anulan las fuerzas, quedar un sistema como el de la figura 7.8, cuya ecuacin del movimiento es
00
0
2
1
322
221
2
1
2
1
xx
kkkkkk
xx
mm
(7.92)
o, de forma ms simple:
0 xkxm (7.93)
-
16
k1 k3k2m2m1
Figura 7.8
Dicha ecuacin puede tambin expresarse de la forma
00
0
2
1
2221
1211
2
1
2
1
xx
kkkk
xx
mm
(7.94)
Para determinar la respuesta en vibracin libre deben determinarse las soluciones del sistema de ecuaciones homogneo. Estas sern del tipo
rteBA
xx
2
1 (7.95)
Sustituyendo en la ecuacin del movimiento se obtiene
02
BA
krm (7.96)
que no es ms que un sistema de ecuaciones algebraicas homogneo. Para que este sistema tenga solucin distinta de la trivial, el determinante de los coeficientes debe ser nulo:
0022
2212
12112
12
krmkkkrm
kmr (7.97)
Donde se ha tenido en cuenta que k12 = k21. Desarrollando el determinante se obtiene:
021222112112221421 kkkrkmkmrmm , (7.98)
que es una ecuacin de segundo grado en r2, denominada ecuacin caracterstica o ecuacin de frecuencia. Su solucin es
QPmm
kkkmm
kmkmmm
kmkmr
21
2122211
2
21
112221
21
1122212 421
21 (7.99)
Dadas las caractersticas de las matrices [m] y [k], puede comprobarse que P 0, que Q 0, y que |P| |Q|, lo que implica que r2 0.
Haciendo la sustitucin
22 r (7.100)
se obtiene la solucin
2
1
ii
r
(7.100)
-
17
Sustituyendo cada una de las cuatro soluciones de r en la expresin (7.95), y sta en cualquiera de las dos ecuaciones del sistema (7.94), se obtienen las siguientes relaciones entre A y B:
(7.101)
Para cada una de las ecuaciones anteriores, los miembros segundo y tercero son el resultado de sustituir las soluciones de r en la primera y segunda de las ecuaciones del sistema (7.94), respectivamente. Para comprobar la igualdad entre ellos no hay ms que efectuar los productos cruzados, comprobndose que se obtiene la ecuacin caracterstica.
Conocida la relacin entre A y B para las cuatro soluciones, puede expresarse la solucin general del sistema:
titititi eAeAeAeAxx
2211
22
22
11
11
2
1 1111
, (7.102)
que tambin puede expresarse:
titititi eAeAeAeAxx
221122
211
12
1 11
(7.103)
Teniendo en cuenta que la respuesta debe ser real, es fcil comprobar que 21 y AA son conjugados complejos de 21 y AA . En ese caso, la solucin general puede expresarse
222
111
12
1 cos1
cos1
ttcxx
(7.104)
Del anlisis anterior y de la respuesta obtenida pueden destacarse algunos aspectos:
La respuesta general estar formada por la combinacin lineal de dos movimientos armnicos, cada uno de ellos con una frecuencia, 1 y 2. Estas frecuencia se denominan frecuencias naturales, y la menor de ellas frecuencia fundamental.
A cada una de estas frecuencias, la relacin entre los valores de x1 y x2 se mantiene constante a lo largo del tiempo. El movimiento que cumple esa condicin se denomina
222222
12
12
22111
2
222
222222
12
12
22111
2
222
121222
12
12
21111
1
111
121222
12
12
21111
1
111
mkk
kmk
ABir
mkk
kmk
ABir
mkk
kmk
AB
ir
mkk
kmk
ABir
-
18
sncrono. Los vectores {1 1}T y {1 2}T, que representan relacin existente entre los movimientos de los distintos grados de libertad a cada una de las frecuencias naturales, se denominan modos naturales de vibracin.
Para cada caso de respuesta, los valores de c1, c2, 1 y 2 dependen de las condiciones iniciales, x1, x2, 1x y 2x , y se determinan a partir de ellas. Con terminadas condiciones iniciales c2 ser nula y la respuesta ser solo a la frecuencia 1. Igualmente, otras condiciones pueden hacer que c1 sea nula, con respuesta slo a la segunda frecuencia. En general, la respuesta ser combinacin de las dos.
En general, el clculo de la respuesta en vibracin libre de un sistema de dos grados de libertad se puede resumir en el siguiente proceso:
1. Clculo de las frecuencias naturales del sistema, 1 y 2, mediante la solucin de un problema de autovalores del tipo 02 mk , donde se ha hecho la sustitucin r2=-2. Esto puede hacerse a partir de la ecuacin caracterstica:
0222212
122
111
mkk
kmk (7.105)
2. Determinacin de los modos de vibracin, {1 1}T y {1 2}T, sustituyendo cada uno de los autovalores obtenidos en la ecuacin del problema de autovalores.
3. Determinacin de las constantes c1, c2, 1 y 2 a partir de las condiciones iniciales.
Ejemplo
Considere un sistema como el de la figura 7.8, en el que k1 = k2 = k3 = k y m1 = m2 = m, en el que se desplazan las masas m1 y m2 de su posicin de equilibrio: x1 = x2 =1, y desde esa posicin, estando en reposo, se le deja vibrar libremente.
La ecuacin del movimiento del sistema es
00
0
2
1
2221
1211
2
1
2
1
xx
kkkk
xx
mm
(7.106)
De acuerdo con los datos, las matrices de masa y rigidez son:
mm
m0
0 (7.107)
kkkk
k2
2 (7.108)
y las condiciones iniciales:
-
19
00
,11
xx (7.109)
Sustituyendo los valores de los coeficientes de las matrices en la ecuacin (7.99) y teniendo en cuenta la igualdad r2 = 2, puede escribirse:
mkmk
mk
mk
mk
mkm
mkm
32344
214
21
2
22
222 (7.110)
Sustituyendo estos valores en la ecuacin del movimiento, o en las ecuaciones (7.101) se obtienen los valores de 1 y 2:
121
k
kk (7.111)
1322
kk
k (7.112)
Los modos de vibracin son, por tanto:
11
1 (7.113)
1
11 (7.114)
Por tanto, la respuesta del sistema puede expresarse:
222111 cos11
cos11
tctctx (7.115)
O, lo que es lo mismo:
tBtAtBtAtx 22221111 sen11
cos11
sen11
cos11
(7.116)
y la velocidad:
tosBtAtBtAtx 221221111111 c11
sen11
cos11
sen11
(7.117)
Sustituyendo las condiciones iniciales, se obtiene:
11
11
11
21 AA (7.118)
11
11
00
2211 cBB (7.119)
-
20
De las expresiones anteriores se deduce fcilmente el valor de los coeficientes: A1 = 1, A2 = B1 = B2 = 0. La respuesta es, por tanto,
ttx 1cos11
(7.120)
Fsicamente representa un movimiento en el que las masas se mueven en fase y con la misma amplitud. Es decir, el muelle central no se deforma, y las masas se mueven como si estuvieran solidarias una a la otra (figura 7.9). Puede comprobarse que la frecuencia , 1, del movimiento es l misma que se obtendra con un sistema con masa igual a la suma de las dos (2m) y rigidez igual a la de los muelles primero y tercero del sistema (2k).
Si las condiciones iniciales fueran
00
,11
xx (7.121)
k1m1 m2
k3k2x1 x2
Figura 7.9
Sustituyendo en las ecuaciones de la respuesta, se obtiene:
11
11
11
21 AA (7.122)
11
11
00
2211 cBB (7.123)
De las expresiones anteriores se deduce fcilmente el valor de los coeficientes: A2 = -1, A1 = B1 = B2 = 0. La respuesta es, por tanto,
ttx 2cos11
(7.124)
Fsicamente representa un movimiento en el que las masas se mueven en sentido contrario una de otra y con la misma amplitud. Es decir, el movimiento es simtrico al centro del sistema (figura 7.10), actuando el centro del muelle central como un punto fijo. En ese caso, el movimiento de cada masa es igual al que se producira si el punto medio fuera un punto de fijacin del muelle central. Puede comprobarse que la frecuencia, 2, del movimiento es la misma que se obtendra con un sistema con masa igual m y rigidez igual 3k.
-
21
k1 k3k2
m2m1
x1 x2
Figura 7.10
En general, con unas condiciones iniciales cualesquiera, la respuesta ser combinacin lineal de las dos soluciones, cada una con un modo de vibracin.
7.5 VIBRACIONES LIBRES DE SISTEMAS DE N GRADOS DE LIBERTAD SIN AMORTIGUAMIENTO
En el caso de sistemas con N grados de libertad, la ecuacin del movimiento es de idntico tipo a la de sistemas de dos grados de libertad:
0 xkxm (7.125) La solucin del sistema de ecuaciones ser tambin del mismo tipo. Puede expresarse de la forma
rtex (7.126)
Sustituyendo en la ecuacin del movimiento se obtiene:
02 rtekrm (7.127) O lo que es lo mismo:
02 krm (7.128) Haciendo la sustitucin r2 = -, la ecuacin anterior puede escribirse de la forma
0 mk (7.129) O, tambin:
01 Ikm (7.130) Las ecuaciones anteriores no son ms que distintas formas de expresar el mismo problema de autovalores, con un nmero de autovalores, j, igual al nmero de ecuaciones del sistema, y un autovector {}j asociado a cada autovalor. Puede comprobarse que si las matrices [m] y [k] son simtricas y definidas positivas, los autovalores sern todos positivos. Si [k] es semidefinida positiva, los autovalores ser iguales a cero o positivos.
De acuerdo con lo anterior, teniendo en cuenta que:
jjjjj iirr 2 , (7.131)
se puede escribir:
-
22
jj 2 (7.132)
Sustituyendo j en la ecuacin (7.129) se obtiene el autovector {}j.
Las soluciones sern, por tanto, del tipo
tijj jex (7.133)
y la solucin general, similarmente al caso de sistemas de dos grados de libertad:
N
jjjjj
N
j
tijj
tijj tceAeAx jj
11cos (7.134)
o, tambin:
N
jjjjjj tsenBtAx
1cos (7.135)
Donde los valores de cj y j, o Aj y Bj, se pueden calcular a partir de las condiciones iniciales 0x y 0x .
A la vista de la solucin general, puede comprobarse que los autovalores son los cuadrados de las frecuencias a que tiende a vibrar el sistema, denominadas frecuencias naturales, y la menor de ellas frecuencia fundamental. Por otro lado, teniendo en cuenta que las soluciones son del tipo de la ecuacin (7.123) los autovectores representan la deformada que toma el sistema cuando vibra a cada una de las frecuencias naturales. Se denominan modos naturales o simplemente modos de vibracin. Estas deformadas estn representadas por la relacin entre los valores de todos los grados de libertad del sistema en cualquier instante de la vibracin.
Normalizacin
De las propiedades de los autovectores, se conoce que si un autovector, {}j, es solucin de la ecuacin del problema de autovalores, tambin lo es {}j. Por ello, los autovectores se expresan asignando un valor a uno de los elementos del vector, quedando todos los dems en funcin de este. Este proceso se denomina normalizacin. La normalizacin ms corrientemente usada es aquella con la que se consigue:
nrm rTr ...2,11 (7.136)
En ese caso, teniendo en cuenta la ecuacin (7.129) y (7.132), es fcil comprobar que se obtiene:
nrk rrTr ...2,12 (7.137)
Con esta normalizacin se consiguen algunas simplificaciones en el clculo de la respuesta de los sistemas.
-
23
Otra normalizacin frecuentemente utilizada es aquella que asigna el valor unidad al trmino mayor del autovector, calculando el resto en funcin de este. Con esta ltima normalizacin u otra cualquiera, diferente de la que cumple la ecuacin (7.136), el resultado de los productos planteados en las ecuaciones anteriores ser distinto:
nrmm rrTr ...2,1** (7.136a)
nrkk rrTr ...2,1** (7.137a)
Donde el * no indica ms que se trata del mismo autovector, pero con otra normalizacin.
Ortogonalidad de los modos
Una propiedad importante de los modos de vibracin es su ortogonalidad. No es una ortogonalidad normal, sino con respecto a la matriz de masa y a la de rigidez. Su demostracin es simple, como se ver a continuacin.
Considrense dos soluciones, 2j , j y 2k , k del problema de autovalores. Dichas soluciones se pueden escribir:
jjj mk 2 (7.138)
kkk mk 2 (7.139)
Premultiplicando la primera ecuacin por Tk y la segunda por Tj , se obtiene:
jTkjjTk mk 2 (7.140)
kTjkkTj mk 2 (7.141)
Si se traspone la segunda ecuacin y se resta de la primera, teniendo en cuenta que las matrices [m] y [k] son simtricas, se obtiene:
jTkkj m 220 (7.142) Teniendo en cuenta que, en general, las frecuencias naturales son distintas, j k, de la ecuacin anterior se deduce que
jTk m 0 (7.143)
Lo que implica que j y k son ortogonales respecto a la matriz de masa. Sustituyendo la ecuacin anterior en la (7.140), se comprueba fcilmente que tambin se cumple
jTk k 0 (7.144)
Es decir, los modos de vibracin son tambin ortogonales respecto a la matriz de rigidez.
-
24
Comentarios
Autovalores mltiples
Se ha indicado que generalmente las frecuencias naturales son distintas entre s, pero puede ocurrir que el problema de autovalores tenga soluciones mltiples, por ejemplo, que haya p frecuencias naturales iguales, con p 2. En ese caso, los autovectores asociados a esa frecuencia sern ortogonales a los asociados al resto, pero pueden no ser ortogonales entre ellos. Sin embargo, puede demostrarse que, dadas las caractersticas de las matrices de masa y rigidez de los sistemas lineales (simtricas, la de masa definida positiva y la de rigidez semidefinida positiva), los autovectores asociados a la frecuencia repetida son tambin ortogonales1.
Independencia de los modos
El conjunto de los n modos de vibracin de un sistema de n grados de libertad son linealmente independientes. Esta propiedad implica que para que sea nula cualquier combinacin lineal de ellos:
0...2211 nnccc (7.145)
deben ser nulos todos los coeficiente cj.
Premultiplicando la ecuacin anterior por mTs , donde el subndice s puede ser cualquier valor 1 s n, queda
0...2211 sTssnnTs mccccm (7.146)
Para que se cumpla esa igualdad, la nica solucin es que cs = 0. Teniendo en cuenta que s puede ser cualquier valor entre 1 y n, ello implica que para que se cumpla la ecuacin (7.145) es necesario que todos los coeficientes cs sean nulos. Lo que implica, a su vez, que los autovectores son linealmente independientes.
Si los modos son linealmente independientes, forman una base del espacio vectorial de las posibles configuraciones, x . Es decir, cualquier valor del vector x puede representarse como una combinacin lineal de los modos de vibracin:
n
jjjcx
1 (7.147)
Donde los coeficientes cj representan la contribucin de cada modo al movimiento total del sistema. Los valores de dichos coeficientes, cs, pueden determinarse premutiplicando la ecuacin anterior por mTs :
sn
js
Tssj
Tsj
Ts cmcmcxm
1 (7.148)
1 Meirovitch, L., Elements of Vibration Analysis, 2 Ed., McGraw-Hill, 1986.
-
25
Donde los modos {}s se han normalizado de acuerdo con la ecuacin (7.136).
La ecuacin (7.147) puede expresarse en forma matricial:
cx (7.149)
Donde [] = [{}1 {}2 ... {}n] y {c} es un vector formado por todos los coeficientes. Si la posicin vara con el tiempo, {x(t)}, los coeficientes tambin lo harn, es decir:
tctx (7.150)
Determinacin de la respuesta, conocidas las condiciones iniciales
La determinacin de los coeficientes de la solucin del sistema (ecuacin (7.135)) a partir de las condiciones iniciales, 0x y 0x , puede hacerse utilizando las propiedades de ortogonalidad de los modos vista anteriormente. Asi, en el instante t = 0 debe cumplirse:
N
jjj Ax
10 (7.151)
N
jjjj Bx
10
(7.152)
Premultiplicando ambas ecuaciones por mTs , con {}s normalizada de acuerdo con (7.136), se obtiene2: sTs Axm 0 (7.153)
ssTs Bxm 0 (7.154) Con lo que variando s, se pueden obtener todas las constantes y, as, la respuesta del sistema.
7.6 DETERMINACIN DE LA RESPUESTA EN VIBRACIN LIBRE MEDIANTE SUPERPOSICIN MODAL
Empleando las propiedades de ortogonalidad e independencia de los modos es posible resolver el problema de vibraciones libres de sistemas de N grados de libertad de otra forma mas simple, mediante el desacoplamiento de las ecuaciones del movimiento. Para ello, dada la ecuacin
0 xkxm (7.156) puede hacerse la transformacin de coordenadas
yx (7.157)
Donde [] es la matriz modal, definida en las ecuaciones (7.149) y (7.150), e {y} es un nuevo vector de coordenadas, denominadas coordenadas normales. Como se vio anteriormente, los
-
26
coeficientes del vector{y} representan la participacin de cada modo en el movimiento. Derivando dos veces la ecuacin (7.157) se obtiene:
yx (7.158) Sustituyendo las ecuaciones (7.157) y /7.158) en la (7.156), se obtiene la expresin
0 ykym (7.159)
Si se premultiplica la ecuacin anterior por []T se obtiene una nueva ecuacin:
0 ykym TT (7.160) Pero los modos de vibracin son ortogonales con respecto a las matrices de masa y rigidez. Ello quiere decir que el resultado de los productos mT y kT sern matrices diagonales: ImT (7.161)
2 kT (7.162) Donde [I] es la matriz identidad y [2] una matriz diagonal formada por los cuadrados de las frecuencias naturales.
Si los modos no estn normalizados de acuerdo con la expresin (7.136), la expresin (7.157) se transforma en
** yx (7.163) Evidentemente, al modificar la amplitud de los modos cambiarn los valores de las coordenadas normales asociadas a ellos. En ese caso, la ecuacin (7.160) se transforma en
0****** ykym TT (7.164) y es fcil comprobar que
MmT ** (7.165) KkT ** (7.166) Donde [M] y [K] son unas matrices diagonales de masa y rigidez, cuyos trminos genricos son ms y ks.
De acuerdo con las ecuaciones (7.161) y (7.162), la ecuacin (7.160) puede escribirse:
0** yKyM (7.167) O tambin, teniendo en cuenta las (7.165) y (7.166),
02 yyI (7.168) 2 Si {}s no est normalizada de acuerdo a (7.136), los primeros miembros de las ecuaciones (7.153) y (7.154) debern multiplicarse, adems, por 1sm
.
-
27
Es decir, el sistema de ecuaciones (7.159) se ha transformado en otro en el que las matrices de los coeficientes son diagonales. Ello quiere decir que las ecuaciones del movimiento estn desacopladas, y el sistema se ha transformado en un sistema de n ecuaciones independientes. Cada una de ellas puede escribirse:
njyKyM jjjj ,,2,10** (7.169)
njyy jsj ,,2,102 (7.169a)
Que son ecuaciones de sistemas de un grado de libertad, cuya solucin es bien conocida:
tsenBtAty jjjjj cos (7.170) cuyos coeficientes Aj y Bj dependen de las condiciones iniciales, 0y y 0y :
0jj yA (7.171)
j
jyB
0 (7.172)
Cada una de estas ecuaciones permite determinar el valor de cada una de las coordenadas yj. Dicha coordenada representa la amplitud del modo de vibracin {}j.
El clculo de las condiciones iniciales puede hacerse a partir de los vectores de condiciones iniciales 0x y 0x . Teniendo en cuenta la ecuacin (7.157), puede escribirse
00 yx (7.173)
00 yx (7.174)
Premultiplicando ambas ecuaciones por mT , teniendo en cuenta la ecuacin (7.161), se obtiene:
000 yymxm TT (7.175)
000 yymxm TT (7.176)
Si la normalizacin de los modos de vibracin se ha hecho de forma que se cumplan las ecuaciones (7.165) y (7.166), quedando como ecuacin del movimiento la (7.167), el resultado de las ecuaciones anteriores ser [M] 0y y [M] 0y . Para obtener las condiciones iniciales ser necesario, por tanto, premultiplicar por [M]-1.
Conocida la respuesta de cada una de las ecuaciones, es decir, los vectores ty e ty , slo falta deshacer el cambio de coordenadas:
yx (7.157) Cada coeficiente del vector {x} puede expresarse, por tanto:
-
28
n
jj
j
jjjiji tsen
ytyx
1
00 cos
(7.177)
A la vista de la transformacin de coordenadas realizada, puede decirse que cada una de las coordenadas yj, denominadas coordenadas normales o modales, representa la aportacin del modo de vibracin {}j a la respuesta del sistema.
Este mtodo de clculo de la respuesta se denomina normalmente anlisis modal, o superposicin modal. El mtodo consiste bsicamente en desacoplar el sistema de ecuaciones a travs de la motriz modal, convirtindola as en un sistema de ecuaciones independientes. La respuesta del sistema ser la suma de la respuesta de cada uno de los modos de vibracin.
Si la normalizacin de los modos de vibracin se ha hecho de forma que se cumplan las ecuaciones (7.165) y (7.166), quedando como ecuacin del movimiento la (7.167), el resultado de las ecuaciones anteriores ser [M] 0y y [M] 0y . Para obtener las condiciones iniciales ser necesario, por tanto, premultiplicar por [M]-1.
Ejemplo
Considere de nuevo el sistema de la figura 7.8, empleado en el ejemplo anterior. La ecuacin del movimiento, obtenida de las ecuaciones (7.106) a (7.108), es
02
20
0
xkkkk
xm
m (7.178)
El problema de autovalores puede plantearse de la forma
01 Ikm (7.179) Se puede comprobar que la solucin es:
11
1 , mk
1 , mk
1 (7.180)
1
12 , m
k32 , mk32 (7.181)
La matriz modal es, por tanto:
11
11 (7.182)
Con lo que, aplicando la transformacin
yyx
11
11 (7.183)
en la ecuacin del movimiento y premultiplicando por []T, queda:
-
29
06002
2002
y
kk
ym
mykym TT (7.184)
Si las condiciones iniciales son
00
,11
xx (7.109)
las correspondientes a las coordenadas normales sern
01
001 yxmM T (7.185)
00
001 yxmM T (7.186)
Con lo que se obtiene:
tyty 111 cos0 (7.187)
02 ty (7.188)
La respuesta es, por tanto:
ttyty
tx 12
1 cos11
1111
(7.189)
Es decir, la respuesta slo tiene componente del primer modo, como lo demuestra el hecho de que y2(t) sea nulo.
Si, en vez de emplear la normalizacin consistente en hacer unidad el mximo valor de cada autovector, se emplea la representada por la ecuacin (7.136) los modos de vibracin se pueden escribir
11
21*
1 m (7.190)
1
121*
2 m (7.191)
y la ecuacin (7.164) se transforma en
0300
1001 ********
y
mk
mk
yykym TT (7.192)
Las condiciones iniciales correspondientes a las nuevas coordenadas normales sern
-
30
0200 **1 myxmI T (7.193)
00
00 **1 yxmI T (7.194)
Con lo que se obtiene:
tmtyty 11*1*1 cos2cos0 (7.195)
0*2 ty (7.196)
Y la respuesta ser:
ttyty
mtx 1*
2
*1 cos
11
1111
21
, (7.197)
que, evidentemente, es la misma que se ha obtenido anteriormente.
7.7 VIBRACIONES LIBRES CON AMORTIGUAMIENTO
Cuando el sistema tiene amortiguamiento, la ecuacin del movimiento en general puede expresarse como se ha visto anteriormente:
tFxkxcxm (7.16) En caso de vibracin libre, queda la expresin
0 xkxcxm (7.198) La solucin es del tipo
rtex (7.199)
Sustituyendo en la ecuacin del movimiento se obtiene:
0][2 rtekrcrm (7.200) O lo que es lo mismo:
0][2 krcrm (7.201) Para que el problema anterior tenga solucin, debe cumplirse:
0][2 krcrm (7.202)
El problema de autovalores planteado es ms complicado de resolver que el visto anteriormente para los sistemas sin amortiguamiento. Su solucin se ver posteriormente.
-
31
No obstante, antes de analizar un sistema de N grados de libertad, se va a plantear la solucin para el caso de sistemas de 2 gdl en los que es ms simple la interpretacin fsica de los resultados obtenidos.
Sistmas de 2 gdl
Desarrollando el determinante de la ecuacin (7.202) para los sistemas de 2 gdl se obtiene una ecuacin en r4, cuyas soluciones son los autovalores, que pueden expresarse:
222
111
hprhpr
(7.203)
Puede demostrarse que si las matrices de masa y amortiguamiento son definidas positivas, p1 y p2 sern positivos. Los trminos h1 y h2 pueden ser reales o imaginarios. Sin embargo, tambin puede comprobarse que si la matriz de rigidez es semidefinida positiva, en caso de ser reales h1 y h2, sus valores sern menores que p1 y p2, respectivamente. Es decir, la parte real de r1 y r2 ser negativa siempre que las matrices cumplan las condiciones anteriores, con lo que los sistemas sern estables, ya que las exponenciales de la ecuacin (7.199) sern decrecientes.
En las condiciones anteriores, si hj es real y distinta de cero se producir un movimiento sobreamortiguado; si hj es cero se tendr un caso de amortiguamiento crtico y si es imaginario (hj = iqj), la respuesta del sistema ser subamortiguada. En esos ltimos casos, puede comprobarse que los autovalores se presentarn por parejas de valores conjugados complejos. A continuacin van a considerarse las soluciones en forma de vibracin subamortiguada.
Sustituyendo los valores de r obtenidos en (7.203) en la ecuacin (7.199) particularizada para dos grados de libertad,
rteBA
x
(7.204)
y sta en la (7.198), se obtienen unas relaciones entre los coeficientes de los modos similares a las (7.101), obtenidas para sistemas sin amortiguar:
2
2
1
1
21
2222
22
2222
11
1111
11
1111
i
i
i
i
eABiqpr
eABiqpr
eAB
iqpr
eABiqpr
(7.205)
En las ecuaciones anteriores puede comprobarse que, igual que ocurre con los autovalores, los autovectores son complejos y se presentan por pares, en los que uno es el conjugado del
-
32
otro. Del anlisis de la respuesta se ver a continuacin el sentido fsico de la existencia de autovectores complejos.
Las expresiones anteriores representan las relaciones entre los coeficientes de los autovectores asociados a los diferentes autovalores. Puede verse que el segundo autovector es conjugado complejo del primero. Teniendo en cuenta estas expresiones, la solucin general de la ecuacin (7.198) puede expresarse en el caso particular de 2 gdl mediante la ecuacin:
tiqpi
tiqpi
tiqpi
tiqpi ee
Aee
Aee
Aee
Axx
222
222
111
111
22
22
11
11
2
1 1111
(7.206)
Donde qi son las frecuencias de vibracin, pi es el exponente asociado al amortiguamiento y A1 '2A dependen de las condiciones iniciales.
La ecuacin anterior puede escribirse tambin:
22
2
22
22
11
1
11
1
1
22
22
11
11
2
1 tiq
tiq
tiq
tiqtp
tiq
tiq
tiq
tiqtp
ee
Aee
Aeee
Aee
Aexx
(7.207)
Si las ecuaciones anteriores se escriben en forma de funciones armnicas, la solucin puede expresarse:
2222
222
1111
111
2
1
coscos
coscos
tt
ctt
cxx
(7.208)
Donde c1, c2, 1 y 2 dependen de las condiciones iniciales.
En las ecuaciones anteriores puede verse que la respuesta vuelve a ser una combinacin lineal de los modos de vibracin. En la ecuacin (7.208) se puede comprobar que cada par de autovectores conjugados representa un modo de vibracin en el que la segunda coordenada, x2, tiene una relacin de amplitud i con la primera, x1, y que adems sufre un desfase i respecto a ella. Ello quiere decir que cuando el sistema vibra a las frecuencias naturales, las deformadas asociadas no presentan los mximos y mnimos simultneamente en todos los puntos, como ocurra en los sistemas sin amortiguar, con modos reales. Por el contrario, cada coordenada llega al mximo en un instante de tiempo diferente, que se representa mediante el desfase existente en sus movimientos.
-
33
7.8 RESPUESTA EN VIBRACIN LIBRE CON AMORTIGUAMIENTO PROPORCIONAL MEDIANTE SUPERPOSICIN MODAL
Cuando el sistema est amortiguado, la matriz de amortiguamiento produce generalmente acoplamiento de las ecuaciones del movimiento resultantes de aplicar el mtodo de superposicin modal. En efecto, si en la ecuacin
0 kxxcxm (7.198)
Se hace la transformacin de coordenadas
yx (7.157)
Y se premultiplica por la matriz modal, la ecuacin resultante ser:
0 KyycyM T (7.209)
Donde las matrices M y K son diagonales.
El trmino de amortiguamiento puede escribirse:
CyycT (7.210)
Que representa un vector donde un trmino genrico, j, puede expresarse:
njCn
rrjr ,...,1
1
yyC (7.211)
Por tanto, un trmino genrico, j, de la ecuacin (7.209) puede escribirse:
njyKyCyM jjrn
rjrjj ,...,10
1
(7.212)
Ecuacin en la que puede comprobarse que se produce acoplamiento con las otras ecuaciones a travs del amortiguamiento, ya que la matriz C no tiene por qu ser diagonal.
Existen casos en que la matriz de amortiguamiento puede expresarse o aproximarse mediante una combinacin lineal de la de masa y rigidez:
kmc (7.213)
En esos casos puede comprobarse que los modos de vibracin obtenidos de la solucin del problema de autovalores representado por la ecuacin (7.201) son los mismos que en el caso del mismo sistema sin amortiguamiento y que desaparece el acoplamiento entre las ecuaciones (7.212), ya que
CKMkmc TTT (7.214)
-
34
Donde, dado que M y K son matrices diagonales, C tambin lo es3. Cada trmino, Cj, de esa matriz puede escribirse:
jjj KMC (7.215)
Para resolver el problema de vibracin libre en sistemas con amortiguamiento proporcional, teniendo en cuenta que los modos de vibracin son los mismos que en el caso sin amortiguar, no hay ms que aplicar el mismo cambio de variables que en ese caso y premultiplicar por la matriz modal traspuesta:
0 KyyCyMkycym TTT (7.216)
Donde las matrices M, C y K son diagonales, con lo que las ecuaciones estarn desacopladas, corresponden a un conjunto de sistemas de un grado de libertad y sern del tipo:
njyKyCyM jjjjjj ,...,10 (7.217)
o, si los autovectores se han normalizado para que la matriz M sea diagonal:
njyyy jjjjjj ,...,1022 (7.218)
Donde el coeficiente
jj
j
jj
jj M
CKM
C
22
(7.219)
es la relacin de amortiguamiento correspondiente a la vibracin asociada al modo de vibracin j.
Las condiciones iniciales del problema, 0jy e 0jy , se obtienen, como antes, de las ecuaciones:
000 xmMyy T1 (7.220)
000 xmMyy T1 (7.221)
Las ecuaciones (7.217) y (7.218) son las correspondientes a sistemas de un grado de libertad con amortiguamiento, cuya solucin se obtiene como se ha visto anteriormente, que ser del tipo:
tyytyety djjjjj
djdjj
tj
jj
sen1cos 000 (7.222)
3 El caso de la matriz de amortiguamiento combinacin lineal de las de masa y rigidez no es ms que un caso particular de otro ms general en el que la matriz c puede expresarse mediante la ecuacin
n
r
rr
1
11kmmc
Donde puede comprobarse que la ecuacin (7.214) corresponde al caso de r 2. Es fcil comprobar que si la matriz c se puede expresar como aqu se indica, los modos de vibracin del problema sin amortiguar pueden emplearse para desacoplar el sistema de ecuaciones [1].
-
35
Donde
21 jjdj (7.223)
Resueltas las ecuaciones anteriores, no habr ms que deshacer el cambio de coordenadas para obtener la solucin al problema x(t):
n
jdjjjj
djdjj
tj tyytye jj
1000 sen
1cos
yx (7.224)
n
jdjjjj
djdjj
tiji tyytyex jj
1000 sen
1cos
(7.225)
Ejemplo
Considere el sistema de la figura 7.3, en el que k1 = k2 = k3 = k=1 y m1 = m2 = m=1, y los coeficientes c1, c2 yc3 son tales que la matriz c es una combinacin lineal de las de masa y rigidez, que puede expresarse por la ecuacin c 0,02m 0.01k. Debe determinarse la respuesta del sistema si se le deja vibrar libremente a partir de unas condiciones iniciales: x10 = 1, x20 =0, 02010 xx .
La ecuacin del movimiento, es
0xxxxxcx
2112
04.01.01.004.0
1001
22
00
kkkk
mm
Los resultados del problema de autovalores del sistema sin amortiguar,
01001
2112
1001
Ikm 1
resuelto anteriormente, son:
11 , 11 ,
11
1
32 , 32 ,
1
12
La matriz modal es, por tanto:
11
11
Aplicando la transformacin x y y, premultiplicando por T, queda:
06002
1.00006.0
2002
yyy
-
36
Que representa dos ecuaciones desacopladas de sistemas de un grado de libertad, con relaciones de amortiguamiento:
0144.02
;015.02 22
22
11
11 MK
CMK
C
Y frecuencias naturales y naturales amortiguadas
11
11 M
K rad/s 1015.01 21 d rad/s
32
22 M
K rad/s, 30144.013 22 d rad/s
Donde las frecuencias naturales, evidentemente, coinciden con los autovalores del sistema sin amortiguar.
Si las condiciones iniciales son
00
,01
xx
las correspondientes a las coordenadas normales sern
11
00T1 ymxM
00
00T1 yxmM
Con lo que se obtiene:
ttety d
dd
t1
11
015.01 .015sen0
1cos
ttety d
dd
t2
22
025.01 sen025.0
1cos
La respuesta es, por tanto:
tytytyty
tyty
21
21
2
1
1111
x
-
37
7.9 EL PROBLEMA DE AUTOVALORES CON AMORTIGUAMIENTO PROPORCIONAL
Se ha visto anteriormente que la ecuacin del movimiento en vibracin libre de un sistema con amortiguamiento
0 kxxcxm (7.198)
tiene una solucin del tipo
rtex , (7.199)
que da lugar a un problema de autovalores de compleja solucin:
0][2 krcrm (7.201) Sin embargo, si el amortiguamiento es proporcional, la solucin es simple, como se ver a continuacin.
Sustituyendo la ecuacin (7.213) en la ecuacin (7.201), se obtiene
02 kkmm rrr , (7.226) que puede escribirse:
012 km rrr , (7.227) o tambin:
012
mkkm
rrr (7.228)
Donde
12
r
rr
(7.229)
La ecuacin (7.228) representa el mismo problema de autovalores que se presenta en los sistemas sin amortiguamiento. Las soluciones, j y j, coinciden con los cuadrados de las frecuencias naturales
2jj (7.230)
y con los modos de vibracin, j, del sistema sin amortiguar.
Los valores de rj se pueden obtener sustituyendo la ecuacin (7.230) en la (7.229) particularizada para el autovalor j, y reordenando, con lo que se obtiene:
jjjj rrr 22 1 (7.231) o lo que es lo mismo,
0222 jjjj rr (7.232)
-
38
Cuya solucin es:
2222
22 jjj
jr
(7.233)
Teniendo en cuenta que
j
jj M
K2 ,
la ecuacin anterior puede escribirse:
22
22
2222 jjj
j
jj
j
jj
j
jjj M
CMC
MKM
MKM
r
(7.234)
o, tambin:
djjjjjjjjjjjjj iir 222 1 (7.235) La solucin del problema de vibracin libre con amortiguamiento proporcional ser, por tanto:
jdjtn
jj
tij
tij
n
jtebeaea jjdjjjdjjj
cos
1
'
1jj x (7.236)
Donde los valores de bj y j se pueden obtener a partir de las condiciones iniciales.
La ecuacin anterior es equivalente a la (7.224) obtenida mediante superposicin modal.
7.10 RESPUESTA EN VIBRACIN FORZADA CON AMORTIGUAMIENTO PROPORCIONAL MEDIANTE SUPERPOSICIN MODAL
Teniendo en cuenta que los modos de vibracin en un sistema con amortiguamiento proporcional coinciden con los del mismo sistema sin amortiguamiento, es fcil ver que tambin puede aplicarse el mtodo de superposicin modal en el caso de vibracin forzada.
En efecto, teniendo en cuenta que la matriz de los modos de vibracin del sistema sin amortiguar o con amortiguamiento proporcional es , si en la ecuacin
tfkxxcxm (7.156)
se hace la transformacin de coordenadas
yx (7.157)
y se premultiplica por la matriz modal, la ecuacin resultante ser:
ttTTT *T ffkycym (7.237)
-
39
tt *T ffKyyCyM (7.238)
Donde las matrices M, C y K son diagonales y f * es el nuevo vector de fuerza.
De acuerdo con ello, el sistema de ecuaciones estar formado por n ecuaciones del tipo
njtftyKyCyMn
rrjr
Tjjjjjjj ,...,1
1
f (7.239)
o, dividiendo por Mj,
njMj
tfM
tfM
tyyy j
n
r j
rjr
j
Tj
jjjjjj ,...,12*
1
2
f (7.240)
o, si los autovectores se han normalizado para que la matriz M sea diagonal:
njtftftyyy jn
rrjr
Tjjjjjjj ,...,12
*
1
2
f (7.241)
Estas ecuaciones independientes representan las ecuaciones que controlan la respuesta, yj, de
cada uno de los modos ante la excitacin externa. El trmino de fuerza, tf j* , no es ms que
la proyeccin del vector de fuerza, f, sobre el modo j. El cociente jj Mtf * se denomina generalmente coeficiente de participacin modal de la fuerza f sobre el modo j. Representa la aportacin del vector de fuerza f al movimiento del modo j. Cada trmino del sumatorio, jr fr/Mj, representa la aportacin de cada componente del vector de fuerza, fr, a la excitacin del modo j.
La solucin general de cada ecuacin ser:
dthftyytyetyn
r
trjrdjjjj
djdjj
tj
jj
10000
sen1cos (7.242)
Donde la primera parte representa la respuesta a las condiciones iniciales, mientras la segunda representa la respuesta a una excitacin genrica, con condiciones iniciales nulas. En cualquier caso, dado que cada una de las ecuaciones representa la ecuacin de un sistema de un grado de libertad, la respuesta se calcular exactamente igual que en el caso de sistemas de un grado de libertad.
Como en casos anteriores, las condiciones iniciales, yj0 e 0jy , se obtienen a partir de las
ecuaciones
000 xmMyy T1
000 xmMyy T1
Conocida la respuesta de cada uno de los modos, la respuesta de cualquiera de los grados de libertad del sistema puede determinarse deshaciendo el cambio de coordenadas:
-
40
n
j
n
r
trjrdjjjj
djdjj
tj dthftyytye jj
1 10000
sen1cos
yx (7.243)
Procedimiento general de clculo de la respuesta
De acuerdo con lo anterior, el procedimiento general de clculo de la respuesta de sistemas de N gdl con amortiguamiento proporcional ante cualquier excitacin puede realizarse siguiendo el siguiente proceso:
Dada la ecuacin del movimiento
tfkxxcxm , (7.156)
con unas condiciones iniciales, 0x y 0x :
1. Se determinan los autovalores y autovectores del sistema no amortiguado asociado:
0 mk
2. Conocidos los autovectores, se desacopla el sistema de ecuaciones haciendo el cambio yx y premultiplicando por la traspuesta de la matriz modal, con lo que queda la
ecuacin:
ttTTT *T ffyKyCyMykycym
Que es un sistema de ecuaciones independientes del tipo
njtftftyKyCyMn
rrjrj
Tjjjjjjj ,...,1
1
*
f
Con condiciones iniciales:
000 xmMyy T1
000 xmMyy T1
3. Se calcula la respuesta, yj(t), a cada una de las ecuaciones.
4. Conocidas estas respuestas, no queda ms que deshacer el cambio de coordenadas: yx
Con lo que se obtiene el vector respuesta, x(t).
Respuesta en rgimen permanente a una excitacin armnica
Considrese una excitacin armnica definida mediante la expresin
tiet 0ff (7.244)
Donde el vector f0 representa la amplitud de la excitacin asociada a cada grado de libertad.
-
41
Siguiendo el procedimiento anterior, es fcil llegar a las ecuaciones asociadas a cada uno de
los modos: njefM
efM
eM
yyy tijj
n
r
tirjr
j
tiTj
jjjjjjj ,...,1
1112 *01
002
f
(7.245)
cuya solucin particular es del tipo
tijj eYty)( (7.246)
Sustituyendo en la ecuacin anterior, se obtiene:
n
r
tirjr
j
tiTj
jjjjj efM
eM
tyi1
0022 112 f (7.247)
De donde es fcil obtener la expresin:
n
r
tirjr
jjj
jtiTj
jjj
jj efi
Me
iM
ty1
022022 2
1
2
1
f (7.248)
o, dividiendo numerador y denominador por 2j :
n
r
tirjr
jjj
jtiTj
jjj
jj efi
Ke
iK
ty1
0202 21
1
21
1
f (7.249)
Que pude tambin escribirse:
*01
0 jjTjj
tiTjj
n
r
tirjrjj fHtHeHefHty
ff (7.250)
Donde Hj es la funcin de respuesta infrecuencia asociada a la ecuacin de la respuesta del modo j.
El vector respuesta, y(t), puede expresarse, a partir de los yj(t):
tt TfHy (7.251)
Donde H es una matriz diagonal, cuyos trminos son los Hj de cada uno de los modos.
Deshaciendo el cambio yx se obtiene el vector respuesta del sistema a la excitacin armnica:
tt TfHx (7.252)
Cada trmino del vector x se puede expresar:
n
rrlr
n
rr
n
jrjljj
n
j
n
rrrjjljl tfGtfHtfHx
11 11 1 (7.253)
Donde
-
42
n
jrjljjlr HG
1 (7.254)
es la funcin de respuesta en frecuencia que relaciona la respuesta del grado de libertad l, xl, con la excitacin del grado de libertad r, fr(t).
La expresin (7.252) puede ponerse tambin de la forma:
tt fGx (7.255)
Donde G es la matriz de funciones de respuesta en frecuencia que relaciona directamente la respuesta de cada grado de libertad con la excitacin en los mismos.
Ejemplo
Considere el sistema del ejemplo anterior sometido a una fuerza excitadora
tiet
01
f
Represente la respuesta en rgimen permanente de las masas 1 y 2 (x1 y x2), en funcin de la frecuencia de excitacin.
En este caso, la ecuacin del movimiento ser igual a la del ejemplo anterior, pero con el trmino excitador correspondiente. La ecuacin ser, por tanto:
tiekkkk
mm
01
2112
04.01.01.004.0
1001
22
00
xxxxxcx
Teniendo en cuenta que la matriz modal es
11
11 ,
el vector de fuerza ser:
titiTT eett
11
01* ff
Sustituyendo en la ecuacin de la respuesta de las coordenadas normales o modales:
n
r
tirjr
jjj
jj
jjj
jj efi
Ki
Kty
102
*2 21
1
21
1
f
se obtiene:
titi eYei
ty 12
21
1 03.012
1
-
43
titi eYei
ty 22
22
2 0288.016
1
Deshaciendo el cambio de coordenadas, se obtiene la solucin: yx
tieYYtytytytytx 21212121111
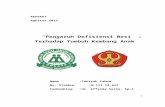
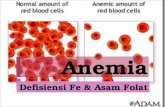
tieYYtytytytytx 21212221212 La figura 7.11 muestra la amplitud de la respuesta de los modos 1 y 2 ante la excitacin definida y la figura 7.12 la amplitud de la respuesta de las dos coordenadas, x1 y x2.
0 1 2 3 4w
5
10
15
20Y1
0 1 2 3 4w
5
10
15
20Y2
Figura 7.11
0 1 2 3 4w
5
10
15
20X1
0 1 2 3 4w
5
10
15
20X2
Figura 7.12
Ejemplo
Resuelva el mismo problema para los vectores de fuerza
tiet
5.01
Af y tiet
5.0
1Bf
Para el primer caso, el vector de fuerzas en coordenadas normales es:
titiTT eett
5.05.1
5.01* ff AA
-
44
Donde tT A*A1 ff 1 y tT A*A2 ff 2 son las aportaciones del vector de fuerzas al movimiento de los modos 1 y 2, respectivamente.
Se puede comprobar que dada la mayor similitud del vector de fuerzas con el primer modo, su aportacin a ese modo es el bastante mayor que al segundo. En este caso, concretamente el triple. De acuerdo con esto, las respuestas de los modos son:
tiAtiA eYeity
1221
1 5.103.012
1
tiAtiA eYeity
2222
2 5.00288.016
1
Y la respuesta de los grados de liberta, al igual que en el ejemplo anterior se expresa mediante las ecuaciones
AA yx
tiAAAAAAA eYYtytytytytx 21212121111
tiAAAAAAA eYYtytytytytx 21212221212 Las figuras 7.13 y 7.14 muestran las amplitudes de los modos y de las respuestas, respectivamente, ante esta excitacin
0 1 2 3 4w
5
10
15
20
25YA1
0 1 2 3 4w
5
10
15
20
25YA2
Figura 7.13
0 1 2 3 4w
5
10
15
20
25XA1
0 1 2 3 4w
5
10
15
20
25XA2
Figura 7.14
-
45
En el caso de la fuerza fB, siguiendo el mismo proceso, es fcil comprobar que el vector de fuerza en coordenadas normales es:
tiet
5.15.0*
Bf
Donde puede comprobarse que en este caso el vector de fuerza tiene una componente mayor asociada al segundo modo que al primero. Siguiendo el mismo procedimiento, es fcil llegar a las expresiones:
tiBtiB eYeity
1221
1 5.003.012
1
tiBtiB eYeity
2222
2 5.10288.016
1
Y la respuesta de los grados de liberta, al igual que en el ejemplo anterior se expresa mediante las ecuaciones AA yx
tiBBBBBBB eYYtytytytytx 21212121111
tiBBBBBBB eYYtytytytytx 21212221212 Las figuras 7.15 y 7.16 muestran las amplitudes de los modos y de las respuestas, respectivamente, ante esta excitacin.
0 1 2 3 4w
2
4
6
8
10
0 1 2 3 4w
2
4
6
8
10
Figura 7.15
0 1 2 3 4w
2
4
6
8
10
0 1 2 3 4w
2
4
6
8
10
Figura 7.16
YB1 YB2
XB1 XB2
-
46
En los ejemplos anteriores se comprueba la influencia de los dos factores indicados sobre la amplitud de la respuesta: la relacin entre la frecuencia de excitacin y las frecuencias naturales del sistema y el coeficiente de participacin modal. Si la frecuencia de excitacin es prxima a una de las frecuencias naturales del sistema, la respuesta del mismo ser alta. En todos los ejemplos se aprecia claramente que la amplitud de la respuesta aumenta en las proximidades de las frecuencias naturales. En segundo lugar, se comprueba que la respuesta de un modo ser mayor o menor dependiendo del valor del coeficiente de participacin modal, jjjTj MtfMt *f . Si dicho coeficiente tiene un valor significativo, la respuesta del modo lo tendr y as su aportacin a la respuesta completa del sistema. Si el producto es despreciable, y la frecuencia de excitacin no es prxima a la natural de ese modo, la respuesta del modo ser tambin despreciable.