
Trajectory Following Control of AUV: A Robust Approach
13
ORIGINAL CONTRIBUTION Trajectory Following Control of AUV: A Robust Approach S. Roy • S. N. Shome • S. Nandy • R. Ray • V. Kumar Received: 25 January 2013 / Accepted: 16 May 2013 / Published online: 26 September 2013 Ó The Institution of Engineers (India) 2013 Abstract A robust control technique based on the second method of Lyapunov is proposed in this paper for accurate trajectory tracking of autonomous underwater vehicles (AUVs). The difficulty in control of AUVs not only resides in the highly non-linear and coupled dynamics but is enhanced by modeling errors, parametric uncertainty and payload variations depending on application requirements. Environmental hazards such as ocean currents sometimes dominate and render the control of underwater systems more challenging. The proposed control technique addres- ses the design of a robust controller for AUVs incorporating the effects of the aforementioned uncertain paradigms with known bounds. The controller performance is verified using the real-life parameters of an operational AUV considering a few uncertainties. Keywords AUV Robust control Trajectory Lyapunov second method AUV-150 Bounded uncertainty Introduction Autonomous Underwater Vehicles are unmanned robotic system having on-board power sources and intelligence suitable for complicated applications. With scientific and technological advancement, AUVs have attracted attention of scientific communities over the last two decades in regard to a host of issues related to design, control, com- munication, autonomy, etc. AUV controller design is in itself a very challenging task as a number of factors such as the inherent highly non- linear and time-varying coupled dynamics of AUV, uncertain hydrodynamic parameters, variation of center of mass (COM) for addition of payloads for different appli- cations, uncertain operating condition and external distur- bances such as ocean current, etc. are involved. These complexities restrict the satisfactory performance of AUVs when they employ controllers based on well-developed linear control theory. Even implementation of feedback linearization based control law presents considerable dif- ficulty, as an exact knowledge of the hardware parameters of the system such as mass, inertia, centre of mass, center of buoyancy, etc. and the accurate sensory feedback it requires becomes involved. Real life physical systems like AUVs always possess bounded uncertainty in parameters to some extent, causing inexact cancellation of nonlinear- ities. Further, noisy sensory information and other distur- bances indeed make necessary the development of new control paradigms for underwater systems. Adaptive control and robust control are the two common control strategies that are employed to tackle controlling difficulties of AUVs. Cristi and Healey [1] proposed a model-based adaptive controller employing recursive least square method for parameter estimation and pole place- ment technique for controller development, assuming that S. Roy (&) S. N. Shome S. Nandy R. Ray V. Kumar CSIR-Central Mechanical Engineering Research Institute, Durgapur 713209, West Bengal, India e-mail: [email protected] S. N. Shome e-mail: [email protected] S. Nandy e-mail: [email protected] R. Ray e-mail: [email protected] V. Kumar e-mail: [email protected] 123 J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265 DOI 10.1007/s40032-013-0069-x
Transcript of Trajectory Following Control of AUV: A Robust Approach

ORIGINAL CONTRIBUTION
Trajectory Following Control of AUV: A Robust Approach
S. Roy • S. N. Shome • S. Nandy •
R. Ray • V. Kumar
Received: 25 January 2013 / Accepted: 16 May 2013 / Published online: 26 September 2013
� The Institution of Engineers (India) 2013
Abstract A robust control technique based on the second
method of Lyapunov is proposed in this paper for accurate
trajectory tracking of autonomous underwater vehicles
(AUVs). The difficulty in control of AUVs not only resides
in the highly non-linear and coupled dynamics but is
enhanced by modeling errors, parametric uncertainty and
payload variations depending on application requirements.
Environmental hazards such as ocean currents sometimes
dominate and render the control of underwater systems
more challenging. The proposed control technique addres-
ses the design of a robust controller for AUVs incorporating
the effects of the aforementioned uncertain paradigms with
known bounds. The controller performance is verified using
the real-life parameters of an operational AUV considering
a few uncertainties.
Keywords AUV � Robust control � Trajectory �Lyapunov second method � AUV-150 �Bounded uncertainty
Introduction
Autonomous Underwater Vehicles are unmanned robotic
system having on-board power sources and intelligence
suitable for complicated applications. With scientific and
technological advancement, AUVs have attracted attention
of scientific communities over the last two decades in
regard to a host of issues related to design, control, com-
munication, autonomy, etc.
AUV controller design is in itself a very challenging
task as a number of factors such as the inherent highly non-
linear and time-varying coupled dynamics of AUV,
uncertain hydrodynamic parameters, variation of center of
mass (COM) for addition of payloads for different appli-
cations, uncertain operating condition and external distur-
bances such as ocean current, etc. are involved. These
complexities restrict the satisfactory performance of AUVs
when they employ controllers based on well-developed
linear control theory. Even implementation of feedback
linearization based control law presents considerable dif-
ficulty, as an exact knowledge of the hardware parameters
of the system such as mass, inertia, centre of mass, center
of buoyancy, etc. and the accurate sensory feedback it
requires becomes involved. Real life physical systems like
AUVs always possess bounded uncertainty in parameters
to some extent, causing inexact cancellation of nonlinear-
ities. Further, noisy sensory information and other distur-
bances indeed make necessary the development of new
control paradigms for underwater systems.
Adaptive control and robust control are the two common
control strategies that are employed to tackle controlling
difficulties of AUVs. Cristi and Healey [1] proposed a
model-based adaptive controller employing recursive least
square method for parameter estimation and pole place-
ment technique for controller development, assuming that
S. Roy (&) � S. N. Shome � S. Nandy � R. Ray � V. Kumar
CSIR-Central Mechanical Engineering Research Institute,
Durgapur 713209, West Bengal, India
e-mail: [email protected]
S. N. Shome
e-mail: [email protected]
S. Nandy
e-mail: [email protected]
R. Ray
e-mail: [email protected]
V. Kumar
e-mail: [email protected]
123
J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265
DOI 10.1007/s40032-013-0069-x

the vehicle was almost linear within the operating region.
Fossen and Sagatun [2] used adaptive control with online
estimation of uncertain parameters. Yuh [3] and Choi and
Yuh [4] developed and implemented a multi-input multi-
output (MIMO) adaptive controller with bounded estima-
tion. Antonelli et al. [5] proposed an adaptive control law
considering the effect of hydrodynamic parameters on the
tracking performance. Adaptive control scores over robust
control techniques in that it can work efficiently with little
or no prior knowledge of the bounds of uncertainty. Pres-
ence of unbounded parametric uncertainty in AUV
dynamics and online calculation of the unknown parame-
ters using adaptive control is computationally very
intensive.
Taking into consideration the above scenario there is a
need to apply appropriate robust control techniques with
the knowledge of the bound in uncertainties. One of the
most powerful robust control techniques that many
researchers have adopted is the sliding mode control.
Yoerger and Slotine [6] designed a sliding mode control
neglecting the cross coupling terms to provide robustness
against the uncertainties caused by hydrodynamic coeffi-
cients. Healey and Lienard [7] proposed a sliding mode
control where the sliding surfaces have been designed
using state variable errors rather than the output errors.
They separated the whole system into non-interacting or
lightly interacting subsystems while designing separate
autopilots for separate subsystems. Cristi et al. [8] and
Papoulias et al. [9] proposed adaptive sliding mode control
based on the linearized dynamics of AUV around the
operating condition on the assumption that a linear model
is a good approximation of non-linear dynamics at constant
speed. Lee et al. [10] proposed a discrete time quasi sliding
mode control where the sampling time is large and claimed
improvement in performance when sampling time increa-
ses. One disadvantage of sliding mode approach is the
increase of chattering effect due to increase of controller
gain, which is varied to make reaching phase finite. Naik
and Sing [11] designed a dive plane controller for AUV
based on state dependent Riccati equation. A backstepping
method associated with Lyapunov based techniques to
design a dive plane controller of AUV was developed by
Lapierre [12].
In this paper, a robust control methodology, that con-
siders the parameter uncertainties through payload varia-
tion (sensor system for various applications) and variation
in hardware parameters (inertia, center of mass, etc.) within
a predefined bound, has been proposed. The bound on the
perturbation of the mass matrix has been derived within the
limit of which the controller design is feasible. The per-
formance of the developed controller has been verified for
various trajectories through rigorous simulation utilizing
the parameters of a developed AUV for 150 m depth.
The organization of the paper is as follows: Section II
presents brief design and dynamics of the AUV-150 and
subsequent conversions of dynamics for the proposed
controller. The robust control algorithm in the perspective
of AUV has been described in detail in Section III. Sim-
ulation results and analyses have been illustrated in Section
IV. At the end mentioned are the concluding remarks.
Brief Design Aspects and Dynamics of AUV-150
The mechanical system design of the AUV-150 had the
following as its main objectives:
• L/D (length to diameter) ratio should be less than 10
and the vehicle should have a positive buoyancy of
4–5 kg for safe recovery in case of any failure
• Adequate internal space to facilitate housing of all
internal components/devices
• Centre of mass should lie below the centre of buoyancy
• The vehicle should be capable of surviving in marine
environment
• Vehicle shape should facilitate modular design with
provision for future expansions
• The vehicle should provide a dry pressure hull for
accommodating onboard electronics and energy system
• Static and dynamic equilibrium to accomplish a variety
of tasks should be ensured
• Centers of drag should be aligned with the centers of
thrust i.e. external forces
• Symmetry for ease of design, modeling and manufacturing
The modular design of AUV-150 breaks down the
overall system into a number of modules such that the basic
configuration of the vehicle need not be altered for addition
or removal of payloads or energy system. Accordingly, the
designed AUV was divided into six modules as shown in
Fig. 1. Control was exercised for five degrees of freedom
(surge, sway, heave, pitch and yaw). The error in roll was
accounted for by ensuring the positive stability of the
vehicle. Multiple thrusters (four through-body tunnel
thrusters and one tail-side main thruster) were used with
independent control to propel and maneuver the AUV. For
real life applications the control inputs are converted to
corresponding voltage to feed the thrusters. The size of the
pressure hulls was finalized on the basis of the payload and
navigational sensors, energy system, mission time and
other multidisciplinary requirements. The torpedo shaped
AUV-150, measured 4.85 m in length and 0.5 m external
diameter, and had a weight of 485 kg in air. Design aspects
of AUV-150 are reported by Shome et al. [13].
The dynamics of AUV-150 was formulated based on the
above configuration. Underwater vehicles are subjected to
Inertia forces which consist of rigid body inertia and inertia
254 J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265
123

due to added mass component, Coriolis and Centripetal
forces for rigid body and added mass component, linear
and quadratic damping forces due to low speed assump-
tions as well as restoring forces in the form of Buoyancy
and Gravity. The nearly accurate center of gravity and
center of buoyancy are determined based on the very
accurate 3D modeling of the AUV-150 using advanced
computer aided design (CAD) tools.
The equations of motion of the AUV-150 are generated
applying Kirchhoff’s equations [14] considering the rigid-
body and added mass kinetic energy components for linear
and angular motions. Thereafter, the rigid-body and added
mass components of inertia matrices, Coriolis and Cen-
tripetal matrices are evaluated. Equations of motion for
AUV-150 in the body-fixed coordinate frame are expressed
compactly in matrix–vector form as:
M _mþ CðmÞmþ DðmÞmþ gðgÞ ¼ s; ð1Þ
where,
M 2 R6�6 ¼MRB þMA;
CðmÞ 2 R6�6 ¼ CRBðmÞ þ CAðmÞ;
DðmÞ 2 R6�6 ¼ DLðmÞ þ DQðmÞ;
g 2 R6�1 ¼ ½x y z u h w�T ;
m 2 R6�1 ¼ ½u t w p q r�T :
MRB and MA represent the rigid body and added mass
matrices respectively. CRB and CA represent the rigid body
and added Coriolis and Centripetal matrices respectively,
while DL and DQ represent the linear and quadratic drag
matrices. The gravity and buoyancy force vector is denoted
by gðgÞ and vector s stands for the input forces and
moments. The linear positions and Euler angles expressed
in inertial reference frame are denoted by the vector g,
while m represents the linear and angular velocity vector
expressed in body coordinate frame. The overall mass
matrix, Coriolis and Centripetal matrix, damping matrix
and the gravity vector for AUV-150 as derived through
dynamic formulation are presented below:
M ¼
539 0 0 0 5:88 0
0 1326 0 �5:88 0 0
0 0 1326 0 0 0
0 �5:88 0 17:1 0 0
5:88 0 0 0 1836 0
0 0 0 0 0 1834
2666666664
3777777775;
CðmÞ ¼
0 0 0
0 0 0
0 0 0
0 �1326w 1326t� 5:88p
1326w 0 �539u� 5:88q
�1326tþ 5:88p 539uþ 5:88q 0
2666666664
0 �1326w 1326v� 5:88p
1326w 0 �539u� 5:88q
�1326tþ 5:88p 539uþ 5:88q 0
0 �1834r 1836qþ 5:88u
1834r 0 �17:1pþ 5:88t
�1836q� 5:88u 17:1p� 5:88t 0
3777777775;
DðmÞ ¼
120 uj j 0 0 0 0 0
0 1224 tj j 0 0 0 0
0 0 1224 wj j 0 0 0
0 0 0 0 pj j 0 0
0 0 0 0 2731 qj j 0
0 0 0 0 0 2731 rj j
2666666664
3777777775;
gðgÞ ¼ 0 0 0 296:1 cos h sin u 291:1 sin h 0½ �T :
Equations of motion derived in body-fixed frame are
converted to inertial frame representation, which is very
much pertinent to controller development. The vehicle
kinematics plays a dominant role in converting the body-
fixed representation to the inertial frame paradigm. Linear
and angular velocities expressed through both the frames
(inertial frame and body-fixed) are correlated by the
kinematic transformation of the form:
_g ¼ JðgÞm; ð2Þ
where, JðgÞ ¼ diagfJ1ðgÞ; J2ðgÞg is the Jacobian matrix.
Differentiation of Eq. (2) gives,
€g ¼ J _mþ _Jm;
) _m ¼ J�1ð€g� _JmÞ:ð3Þ
The dynamic equation given by Eq. (1) is expressed in
the inertial frame utilizing Eqs. (2) and (3) as follows:
�MðgÞ€gþ �Cðm; gÞ _gþ �Dðm; gÞ _gþ �gðgÞ ¼ �s; ð4Þ
where,
Fig. 1 Modular AUV-150 with Coordinate frames
J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265 255
123

�M ¼ J�T MJ�1; �C ¼ J�T ½C�MJ�1 _J�J�1;
�D ¼ J�T DJ�1; �g ¼ J�T g; �s ¼ J�Ts:
Eq. (4) can be compactly written in the following form:
�MðgÞ€gþHðm; gÞ ¼ �s; ð5Þ
where,
Hðm; gÞ ¼ �Cðm; gÞ _gþ �Dðm; gÞ _gþ �gðgÞ:
Hðm; gÞ represents the nonlinear function associated
with the nonlinearities due to Coriolis, Centripetal and
damping forces. The modified form of Eq. (5) is written as
follows:
€g ¼ �fðm; gÞ þ bðgÞ�s; ð6Þ
where,
bðgÞ ¼ �M�1ðgÞ; ð6aÞ
and fðm; gÞ ¼ bðgÞHðm; gÞ: ð6bÞ
Robust Controller Design
Considering the transformed dynamics of the AUV given
in Eq. (6), a robust control method based on the Second
Method of Lyapunov [15] is adopted. The control law is
designed choosing the form of the input torque vector �s as
follows:
�s ¼ b�1ðgÞðuþ fðg; mÞÞ; ð7Þ
here, b; f represent the nominal values of the matrices b; f
respectively and u is the vector of auxiliary control input. The
uncertainties due to modeling error, external disturbances as
well as parameter variations due to inclusion of various
payloads to the AUV-150 are assumed to be bounded and
reflected through:
D �M :¼ MðgÞ � �MðgÞ; ð8Þ
DH :¼ Hðm; gÞ �Hðm; gÞ: ð9Þ
The bounds are chosen from the known bound of the
parameters and model uncertainty. Considering the nonlinear
control law given by Eq. (7), the system described by Eq. (6) is
transformed into the following form:
€g ¼ bb�1ðuþ fÞ � f: ð10Þ
Substituting fðm; gÞ ¼ bðgÞHðm; gÞ into Eq. (10) with
some manipulation Eq. (11) is obtained:
€g ¼ uþ ðbb�1 � IÞuþ bb�1
bH� bH
¼ uþ ðbb�1 � IÞuþ bðH�HÞ¼ uþ ðbb�1 � IÞuþ bDH
) €g ¼ uþ n;
ð11Þ
where, n ¼ Cuþ bDH with C ¼ ðbb�1 � IÞ:The uncertainty vector nðg; _g; uÞ depends on bounds on
the mass matrix, Coriolis and Centripetal matrix and
damping matrix as well as evolution of the states and the
input to the system. It also helps to estimate the additional
input required to compensate for the bounded uncertainties
and the disturbances present in the system to achieve the
robust performance.
Now, defining gdðtÞ as the reference trajectory to be
tracked, the corresponding positional and velocity error
vectors are given by:
e1ðtÞ ¼ gðtÞ � gdðtÞ; ð12Þ
e2ðtÞ ¼ _gðtÞ � _gdðtÞ; ð13Þ
respectively. Considering e ¼ e1 e2½ �T as state vector
Eqs. (12) and (13) are compactly written in the following
state-space form
_e ¼ Aeþ Bfuþ n� €gdg; ð14Þ
where,
A ¼ 0 I0 0
� �;B ¼ 0
I
� �; _e ¼ _e1
_e2
� �: ð15Þ
To ensure stability and to obtain robust performance it is
essential to feed additional control input into the system.
The following structure of the control law is selected to
track the desired trajectories gdðtÞ :
u ¼ uþ Du; ð16Þ
where, u represents the stabilizing control law for the time
varying nonlinear nominal model (assuming no uncertainty).
The extra corrective term Du is chosen to overcome the
effects of uncertainty caused by the parameter variations. The
structure of the control law u is similar for the nominal
dynamics and chosen as,
uðtÞ ¼ €gd �K1e1 �K2e2 ¼ €gd �Ke; ð17Þ
where,K1 ¼ diagfx21;x
22; . . .;x2
6g; and K2 ¼ diagf2x1; 2
x2; . . .; 2x6g:The gain matrix K ¼ ½K1;K2� determines the expo-
nential error convergence. The natural frequencies xi’s for
i ¼ 1; . . .; 6 determines the rate at which the tracking error
decreases. Substituting the control law given by Eq. (16),
combining with Eq. (17), into Eq. (14) the error dynamics
takes the following form:
_e ¼ Aeþ BfDuþ ng; ð18Þ
where, n ¼ CðDuþ €gd �KeÞ þ bDH,�A ¼ A� BK and �A is Hurwitz.
Thus the objective of tracking the desired time varying
trajectory gdðtÞ involves the problem of stabilizing the
256 J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265
123

nonlinear and time varying dynamic system of AUV. The
main idea of this control formulation is to compensate the
effect of the uncertain and unknown parameter n from the
knowledge of the ‘worst case’ bounds on parameter vari-
ations with the help of the term Du from the available
information. Following assumptions are made to estimate
the worst case bounds on the function nðg; _g; uÞ.
Assumption-1 As time propagates the desired trajectory
gdðtÞ and its derivatives remain bounded and smooth
having the properties:
supt� 0
gd�� ��\K\1; ð19Þ
where, K is a known value over the time t.
Assumption-2 It is assumed that the variation in the
inertia matrix �M is mainly due to the variation in payload
which causes variation of the gravity/buoyancy centre and
system inertia. For the bounded parameter variation in the
inertia matrix provided in the Appendix, the norm of C is
also bounded and lies according to:
Ck k ¼ bb�1 � I�� ��� b\1; for all g 2 R
6: ð20Þ
Assumption-3 Exploring the structure of the individual
terms that constitute H and using the above assumptions, a
function of the state variables and other known values is
found such that:
DHk k� cðtÞ; ð21Þ
where, c is bounded in t.
From Assumption-2 a range of perturbation on the mass
matrix is evaluated given the nominal values of system
hardware parameters based on the following derivation.
Let us take, b ¼ bþ Db where, Db is the perturbation
in b. So,
bb�1 � I ¼ ðbþ DbÞb�1 � I ¼ Iþ Dbb�1 � I ¼ Dbb�1:
From Assumption-2, it can be written
b ¼ Dbb�1�� ��� Dbk k b
�1���
���\1
) Dbk k\ 1
b�1
������:
ð22Þ
Theorem-1 If the maximum and minimum eigen values
of M and D �M are denoted by kminM
kmaxM
� �and kmin kmax½ �
respectively then maximum and minimum eigen values of�M are given by kmin
Mþkmin kmax
Mþ kmax
� �.
Proof The matrices �M and M are symmetric and real, i.e.,
Hermitian. It has been shown below that D �M of Eq. (8) is
also Hermitian validating the Theorem-1. For any non zero
vector y from Rayleigh quotient (Appendix-C) following
is obtained:
RðM; yÞ :¼ yT My
yT y; ð23Þ
with; kminM�RðM; yÞ� kmax
M; ð23aÞ
and RðD �M; yÞ :¼ yTD �My
yT y; ð24Þ
with; kmin�RðD �M; yÞ� kmax: ð24aÞ
Similarly Rayleigh quotient for �M yields,
Rð �M; yÞ :¼ yT �My
yT y:¼ yTðMþ D �MÞy
yT y:¼ yT My
yT yþ yTD �My
yT y
:¼ RðM; yÞ þ RðD �M; yÞ:
Thus, combining Eqs. 23a and 24a results in
kminMþkmin�Rð �M; yÞ� kmax
Mþ kmax:
Theorem-2 Given the maximum and minimum eigen
values of M the criterion for the allowable range of the
perturbation DM from the nominal value can be evaluated
and written as follows:
kmaxM
kminM
kminM� kmax
M
\kminMþ kmin:
Proof From b ¼ bþ Db we get,
Dbk k ¼ b� b�� ��� bk k þ b
�� ��� �M�1
������þ M
�1���
���
The following Lemma’s are satisfied for a symmetric
matrix X 2 Rn�n:
Lemma 1
Xk k ¼ maxf k1j j; . . .; knj jg:
Lemma 2 If X�1 exists then X�1�� �� ¼ 1
kj j, where kj j is the
smallest eigen value of X:
So,
Dbk k� kmax�M�1 þ kmax
M�1 �
1
kmin�M
þ 1
kminM
;
and
b�1
������ ¼ M
�� �� ¼ kmaxM:
From Eq. (22) the following criterion is obtained:
1
kmin�M
þ 1
kminM
\1
kmaxM
)kmax
Mkmin
M
kminM� kmax
M
\kmin�M : ð25Þ
Theorem-1 and Eq. (25) yields
J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265 257
123

kmaxM
kminM
kminM� kmax
M
\kminMþ kmin:
Considering these assumptions, supplemented by the
theorems described above a corrective term Du is chosen to
tackle the uncertainties as provided below.
Theorem-3 The system given by Eq. (6) is globally
asymptotically stable (proof provided in Appendix-A)
using the control law represented by Eq. (16) if the nominal
control term u is given by Eq. (17) and the additional term
Du is chosen in the following manner:
Du ¼�dðe; tÞ ðB
T PeÞðBT PeÞk k if BT Pe
�� �� 6¼ 0
0 if BT Pe�� �� ¼ 0
(ð26Þ
where, P is the unique positive-definite symmetric matrix
which is the solution of the Lyapunov equation:
�ATPþ PA ¼ �Q;
with Q is a symmetric positive-definite matrix.
It is assumed that, a time bounded continuous function
dðe; tÞ satisfies the following two inequalities,
Duk k\dðe; tÞ; ð27Þnk k\dðe; tÞ: ð28Þ
Using the laid down assumptions and the above inequalities
the value of dðe; tÞ is constructed according to the following
basis:
nk k� CðDuþ €gd �KeÞ þ bDH�� ��� bdðe; tÞ þ bKþ Kk k � ek k þ bk kc:¼ dðe; tÞ:
With, 0\b\1 the value of d is evaluated as:
dðe; tÞ ¼ 1
1� bfbKþ Kk k � ek k þ bk kcðtÞg: ð29Þ
However, the control law introduced in (26) causes
chattering which is a common phenomenon in discontinuous
control law and can excite high frequency unmodelled
dynamics. Introducing a control bandwidth l the control law
is converted into a continuous domain and as a result the
chattering effect is eliminated. The formulation of the
modified control law is described below.
Theorem-4 The system given by equation Eq. (6) is
uniformly ultimately bounded (u.u.b.) (proof provided in
Appendix-B) using the control law represented by Eq. (16)
if the nominal control term u is given by Eq. (17) and the
additional control input Du is chosen in the following
manner:
Du ¼�dðe; tÞ ðB
T PeÞðBT PeÞk k if BT Pe
�� ��� l
� dðe;tÞl BT Pe if BT Pe
�� ��\l
8<: ð30Þ
The control laws are verified utilizing the parameters of
AUV-150 developed at CSIR-CMERI, Durgapur. The
results are presented in the subsequent section.
Simulation Results and Discussions
The performance of the proposed control laws are verified
while AUV-150 follows various path/trajectory. Keeping
in mind that the basic application of AUV-150 is surveying
a region at sea, attempt has been made to follow various
special types of trajectory i.e., circular, figure of eight
shape and lawn-mower. For practical implementation, the
control inputs provided through the directional thrusters to
follow the desired path are kept in the form of voltage.
Voltage requirement for each propeller node is calculated
by transforming the required controller force/torque to the
corresponding thruster voltages using a polynomial. The
thrust (force/torque) versus voltage characteristics poly-
nomial for each thruster node is determined through
experiments. AUV-150 is having four similar tunnel
thrusters and each thruster posses the same characteristics.
The voltage ðVÞand force/torque ð�sÞ relationship for each
tunnel thruster is governed by,
V ¼ 0:0005�s3 � 0:0468�s2 þ 2�s� 1:354: ð31Þ
Similarly, for main thruster the relation is governed by
the following equation,
V ¼ �0:003�s2 � 0:1048�s� 0:1962: ð32Þ
The initial pose g0 of the AUV-150 is selected judiciously
based on the trajectory definitions. The controller parameters
are chosen as K1 ¼ diagf4; 4; 4; 0; 4; 4g; K2 ¼ diagf4; 4;4; 0; 4; 4g; b ¼ 0:605; l ¼ 0:1: The reason behind choosing
the controller gains as above is to achieve a critically damped
performance for the nominal system. The fourth term of the
gain matrices is kept as zero as there is no active control for
roll compensation of AUV-150.
A whole spectrum of payload and inertia and gravity/
buoyancy center variations within bounds is considered
during simulation. The parametric deviations are given in
Table-3 (Appendix-D) while Table-2 (Appendix-D)
reflects the corresponding nominal values. Based on these
parameter variations/uncertainties, the AUV-150 is direc-
ted to move through various path and the respective sim-
ulated performances are presented.
For a circular path, the reference trajectory definitions
(commands) are given as follows:
258 J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265
123

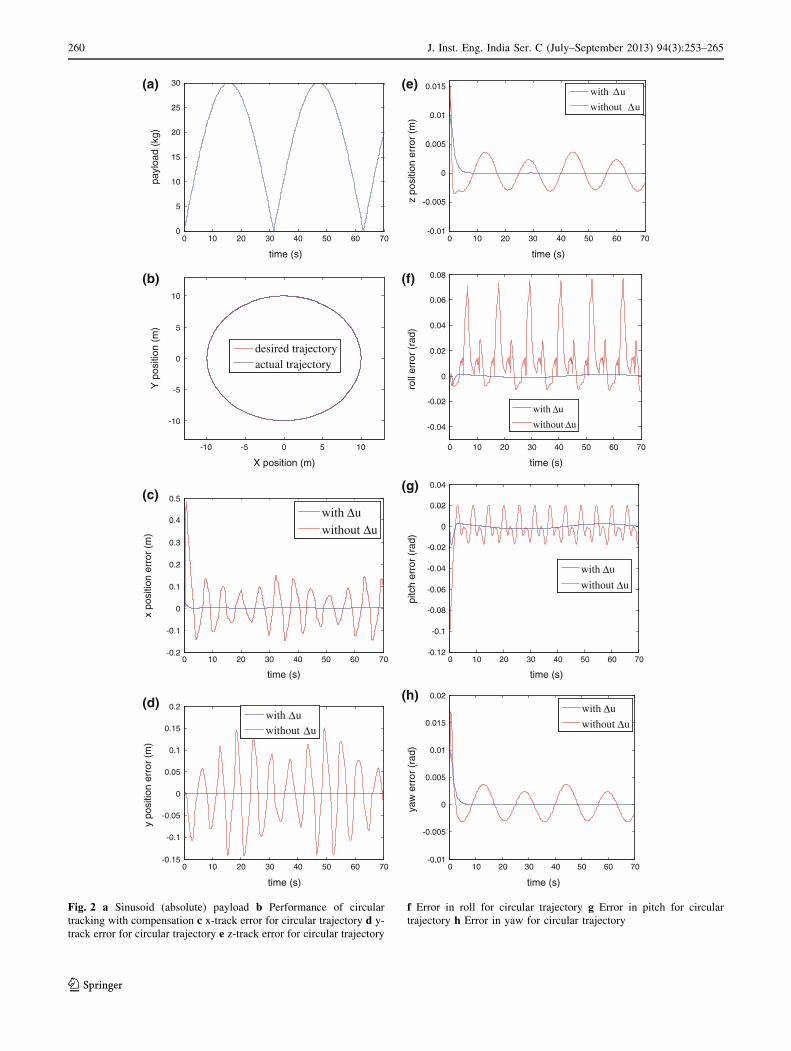
xdðtÞ ¼ 10 sinð0:1Þt; ydðtÞ ¼ 10 cosð0:1tÞ; zdðtÞ ¼ 5;
udðtÞ ¼ 0; hdðtÞ ¼ 0; wdðtÞ ¼ 0:1t:
In this case the variations in parameters are chosen to
be sinusoidal (absolute value) e.g., the overall system
mass vary over time from the nominal mass to the varying
augmented mass (nominal mass with sinusoidal varying
payload). The reason behind the choice of sinusoidal
variation is to verify the performance of the controller
over time-varying uncertainties which lie within any
value between the maximum and minimum limit of the
parametric variation.
The minimum value of the variation in Fig. 2a signifies
nominal system mass and maximum value shows maxi-
mum augmented mass. Fig. 2b shows the corresponding
trajectory following performance applying compensation.
Figure 2c–e illustrate the effect of the additional term Du
over x-y-z tracking response respectively when the system
is subjected to varying uncertainties.
It is evident that x-y-z positional errors are oscillating in
nature when the trajectory is tried to achieve without
considering the corrective term for compensation of
uncertainties. Oscillatory behavior of the errors is absent
when control is improvised with an additional term Du and
errors attained a negligible steady value within a few
seconds.
The attitude ðu; h; wÞ errors are represented through
Fig. 2f–h, which illustrate the effect of the additional term
Du over roll-pitch-yaw tracking performance respectively.
It is observed that the errors, if uncompensated, are oscil-
latory in nature with multiple peaks of various amplitudes.
The error response with compensation shows a steady
behavior with negligible magnitude when the corrective
term is considered.
A time-invariant parametric variation is selected to
simulate the controller for figure of eight shape trajectory.
In this case, all the parametric variations are assumed to be
fixed but they assume the maximum value for which the
controller has been designed. The details are provided in
Table-2.
The trajectory definition for a figure of eight shape path
is as selected as:
xdðtÞ ¼ 15 sinð0:1tÞ; ydðtÞ ¼ 15 cosð0:05tÞ; zdðtÞ ¼ 5;
udðtÞ ¼ 0; hdðtÞ ¼ 0;
wdðtÞ ¼ 8
p
X1n¼1;3;5...
ð�1Þðn�1Þ=2
n2sinð0:1ntÞ:
Figure 3a demonstrates the performance of the controller
while following figure of eight shape path with compen-
sation and the differences between the desired and the actual
trajectory at any instant is negligible. The errors in position
and attitude for a figure of eight shape are shown in
Fig. 3b–g. The natures of the curves are similar to that of
circular trajectory with minor differences in the
magnitude.
Such practical situations may often arise, especially in
adverse sea condition or critical battery situation, when the
AUV needs to come up quickly on the surface by reducing
its weight suddenly or in a phased manner. This condition
has been accomplished with the lawn-mower trajectory
where the values of the hardware parameters (system mass,
inertia, gravity center etc.) remain constant for a given time
interval but fall down to another value sharply, thus gen-
erating a parametric variation like a staircase as depicted in
Fig. 4a.
The desired trajectory (commands) for lawn-mower
mission are envisaged through the following definitions:
xdðtÞ ¼ 0:25t þ 2:5 sinð0:1tÞ; ydðtÞ ¼ 15 cosð0:05tÞ; zdðtÞ¼ 5; udðtÞ ¼ 0; hdðtÞ ¼ 0; :
wdðtÞ ¼ 8
p
X1n¼1;2;...
sinðnp4Þ þ sinð3np
4Þ
n2sinð0:05ntÞ:
Figure 4b exhibits the tracking performance of the AUV
while following the lawn-mower motion; here the differ-
ence between the desired and the actual trajectory (when
additional corrective term in the control is considered) at
any instant is found to be negligible. Track errors are
represented in Fig. 4c–h and are found to be depicting
similar behavior as before with different amplitudes in the
oscillating curves.
It is clearly visible from Figs. 2f, 3e and 4f that the roll
track errors are not fully compensated due to absence of
active control for rolling compensation with AUV-150.
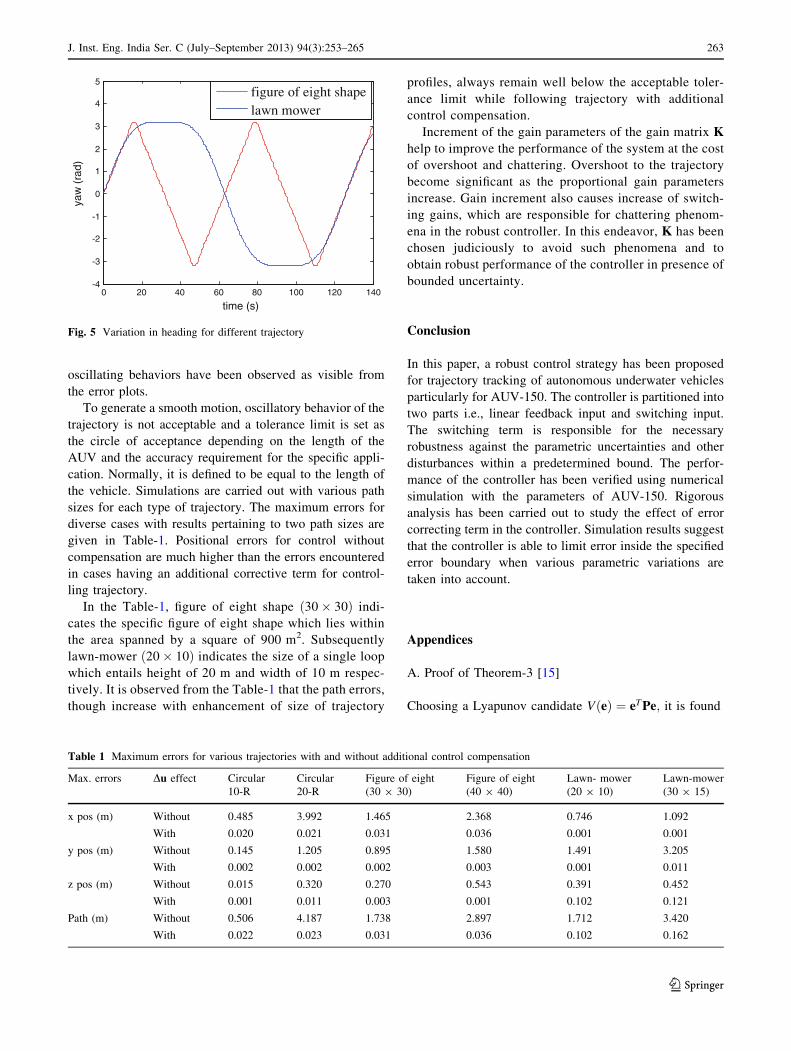
Figure 5 represents the variation of heading angle i.e.
yaw for different trajectory profiles. For circular tracking,
nature of yaw versus time curve is a straight line varying
from 0 to 2p rad for one complete revolution. The nature
of variations of heading angle for figure of eight shape
and lawn-mower trajectory are triangular and trapezoidal
respectively as shown in Fig. 5. From the simulation
results it is clear that the controller performance is very
promising under bounded parametric deviations. The
advantage of this controller is that it can work efficiently
for any perturbations within the maximum allowable
parametric deviations. This claim has been substantiated
by taking two special types of payload variations
(Figs. 2a and 4a).
The linear position errors (Figs. 2c–e, 3b–d, and 4c–e)
and attitude errors (Figs. 2f–h, 3e–g, and 4f–h) plots depict
how the error correcting term Du improves the perfor-
mance of the controller imparting robustness to the system.
Without the additional corrective control action sustained
J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265 259
123
0 10 20 30 40 50 60 700
5
10
15
20
25
30
time (s)
payl
oad
(kg)
-10 -5 0 5 10
-10
-5
0
5
10
X position (m)
Y p
ositi
on (
m)
desired trajectoryactual trajectory
0 10 20 30 40 50 60 70-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
time (s)
x po
sitio
n er
ror
(m)
with Δuwithout Δu
0 10 20 30 40 50 60 70-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
time (s)
y po
sitio
n er
ror
(m)
with Δuwithout Δu
0 10 20 30 40 50 60 70-0.01
-0.005
0
0.005
0.01
0.015
time (s)
z po
sitio
n er
ror
(m)
with Δu
without Δu
0 10 20 30 40 50 60 70
-0.04
-0.02
0
0.02
0.04
0.06
0.08
time (s)
roll
erro
r (r
ad)
with Δu
without Δu
0 10 20 30 40 50 60 70-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
time (s)
pitc
h er
ror
(rad
)
with Δu
without Δu
0 10 20 30 40 50 60 70-0.01
-0.005
0
0.005
0.01
0.015
0.02
time (s)
yaw
err
or (
rad)
with Δu
without Δu
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
Fig. 2 a Sinusoid (absolute) payload b Performance of circular
tracking with compensation c x-track error for circular trajectory d y-
track error for circular trajectory e z-track error for circular trajectory
f Error in roll for circular trajectory g Error in pitch for circular
trajectory h Error in yaw for circular trajectory
260 J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265
123

-15 -10 -5 0 5 10 15
-15
-10
-5
0
5
10
15
x position (m)
y po
sitio
n (m
)
desired trajectoryactual trajectory
0 10 20 30 40 50 60 70-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
time (s)
x po
sitio
n er
ror
(m)
with Δuwithout Δu
0 10 20 30 40 50 60 70-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
time (s)
y po
sitio
n er
ror
(m)
with Δuwithout Δu
0 10 20 30 40 50 60 70-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
time (s)
z po
sitio
n er
ror
(m)
with Δuwithout Δu
0 10 20 30 40 50 60 70-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
time (s)
roll
erro
r (r
ad)
with Δu
without Δu
0 10 20 30 40 50 60 70-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
time (s)
pitc
h er
ror
(rad
)
with Δu
without Δu
0 10 20 30 40 50 60 70-0.015
-0.01
-0.005
0
0.005
0.01
time (s)
yaw
err
or (
rad)
with Δuwithout Δu
(a)
(b)
(c)
(e)
(f)
(g)
(d)
Fig. 3 a Figure of eight shape tracking response with compensation
b x-track error for figure of eight shape trajectory c y-track error for
figure of eight shape trajectory d z-track error for figure of eight shape
trajectory e Error in roll for figure of eight shape trajectory f Error in
pitch for figure of eight shape trajectory g Error in yaw for figure of
eight shape trajectory
J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265 261
123

0 10 20 30 40 50 60 700
5
10
15
20
25
30
35
40
time (s)
payl
oad
(kg)
0 10 20 30 40 50 60-20
-15
-10
-5
0
5
10
15
20
25
30
35
x position (m)
y po
sitio
n (m
)
desired trajectory trajectory with Δu trajectory without Δu
0 10 20 30 40 50 60 70-1.5
-1
-0.5
0
0.5
1
1.5
time (s)
x po
sitio
n er
ror
(m)
with Δuwithout Δu
0 10 20 30 40 50 60 70-1
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
time (s)
y po
sitio
n er
ror
(m)
with Δuwithout Δu
0 10 20 30 40 50 60 70-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
time (s)
z po
sitio
n er
ror
(m)
with Δu
without Δu
0 10 20 30 40 50 60 70-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
0.05
time (s)
roll
erro
r (r
ad)
with Δuwithout Δu
0 10 20 30 40 50 60 70-0.01
-0.005
0
0.005
0.01
0.015
0.02
time (s)
pitc
h er
ror
(rad
) with Δuwithout Δu
0 10 20 30 40 50 60 70-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
time (s)
yaw
err
or (
rad)
with Δu
without Δu
(a)(e)
(f)
(g)
(h)
(b)
(c)
(d)
Fig. 4 a Time varying payload (stair-case profile) b Lawn-mower
tracking performance c x-track error for lawn mower trajectory d y-
track error for lawn mower trajectory e z-track error for lawn mower
trajectory f Error in roll for lawn mower trajectory g Error in pitch for
lawn mower trajectory h Error in yaw for lawn mower trajectory
262 J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265
123
oscillating behaviors have been observed as visible from
the error plots.
To generate a smooth motion, oscillatory behavior of the
trajectory is not acceptable and a tolerance limit is set as
the circle of acceptance depending on the length of the
AUV and the accuracy requirement for the specific appli-
cation. Normally, it is defined to be equal to the length of
the vehicle. Simulations are carried out with various path
sizes for each type of trajectory. The maximum errors for
diverse cases with results pertaining to two path sizes are
given in Table-1. Positional errors for control without
compensation are much higher than the errors encountered
in cases having an additional corrective term for control-
ling trajectory.
In the Table-1, figure of eight shape ð30� 30Þ indi-
cates the specific figure of eight shape which lies within
the area spanned by a square of 900 m2. Subsequently
lawn-mower ð20� 10Þ indicates the size of a single loop
which entails height of 20 m and width of 10 m respec-
tively. It is observed from the Table-1 that the path errors,
though increase with enhancement of size of trajectory
profiles, always remain well below the acceptable toler-
ance limit while following trajectory with additional
control compensation.
Increment of the gain parameters of the gain matrix K
help to improve the performance of the system at the cost
of overshoot and chattering. Overshoot to the trajectory
become significant as the proportional gain parameters
increase. Gain increment also causes increase of switch-
ing gains, which are responsible for chattering phenom-
ena in the robust controller. In this endeavor, K has been
chosen judiciously to avoid such phenomena and to
obtain robust performance of the controller in presence of
bounded uncertainty.
Conclusion
In this paper, a robust control strategy has been proposed
for trajectory tracking of autonomous underwater vehicles
particularly for AUV-150. The controller is partitioned into
two parts i.e., linear feedback input and switching input.
The switching term is responsible for the necessary
robustness against the parametric uncertainties and other
disturbances within a predetermined bound. The perfor-
mance of the controller has been verified using numerical
simulation with the parameters of AUV-150. Rigorous
analysis has been carried out to study the effect of error
correcting term in the controller. Simulation results suggest
that the controller is able to limit error inside the specified
error boundary when various parametric variations are
taken into account.
Appendices
A. Proof of Theorem-3 [15]
Choosing a Lyapunov candidate VðeÞ ¼ eT Pe; it is found
Table 1 Maximum errors for various trajectories with and without additional control compensation
Max. errors Du effect Circular
10-R
Circular
20-R
Figure of eight
(30 9 30)
Figure of eight
(40 9 40)
Lawn- mower
(20 9 10)
Lawn-mower
(30 9 15)
x pos (m) Without 0.485 3.992 1.465 2.368 0.746 1.092
With 0.020 0.021 0.031 0.036 0.001 0.001
y pos (m) Without 0.145 1.205 0.895 1.580 1.491 3.205
With 0.002 0.002 0.002 0.003 0.001 0.011
z pos (m) Without 0.015 0.320 0.270 0.543 0.391 0.452
With 0.001 0.011 0.003 0.001 0.102 0.121
Path (m) Without 0.506 4.187 1.738 2.897 1.712 3.420
With 0.022 0.023 0.031 0.036 0.102 0.162
0 20 40 60 80 100 120 140-4
-3
-2
-1
0
1
2
3
4
5
time (s)
yaw
(ra
d)
figure of eight shapelawn mower
Fig. 5 Variation in heading for different trajectory
J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265 263
123

_VðeÞ ¼ _eT Peþ eT P_e
¼ eTð �ATPþ PAÞeþ 2eT PBðDuþ nÞ
¼ �eT Qeþ 2wTðDuþ nÞ;ð33Þ
where, w ¼ BT Pe is taken for simplicity.
If w ¼ 0 then Eq. (33) yields
_VðeÞ ¼ �eT Qe\0: ð34Þ
For w 6¼ 0 the second part of Eq. (33) becomes
wTð�dw
wk k þ nÞ ¼ �dwT w
wk k þ wTn
� � d wk k þ wk k � nk k¼ wk kð�dþ nk kÞ� 0
ð35Þ
Since, nk k\d so _VðeÞ\0
B. Proof of Theorem-4 [15]
Using a Lyapunov candidate VðeÞ ¼ eT Pe and considering
w ¼ BT Pe it is obtained from Eq. (33)
_VðeÞ ¼ �eT Qeþ 2wTðDuþ nÞ: ð36Þ
When BT Pe�� �� ¼ wk k� l from Eq. (35) one obtains
_VðeÞ\0:
When BT Pe�� �� ¼ wk k\l from Eq. (36)
_VðeÞ ¼ �eT Qeþ 2wTDuþ 2wTn
� � eT Qeþ 2wTDuþ 2 wk k � nk k� � eT Qeþ 2wTDuþ 2 wk kd
� � eT Qe� 2wTdw
lþ 2d
wT w
wk k
� � eT Qeþ 2wT �dw
lþ d
w
wk k
� �:
ð37Þ
Eq. (37) takes the maximum value lðd=2Þ when wk k ¼ðl=2Þ. Therefore,
_VðeÞ� � eT Qeþ ld2\0; ð38Þ
provided eT Qe [ lðd=2Þ:With the relationship
kminðQÞ ek k2� eT Qe� kmaxðQÞ ek k2;
where, kminðQÞ and kmaxðQÞ are the minimum and
maximum eigen values of Q respectively it can be
written that _VðeÞ\0 if
kminðQÞ ek k2 [ ld2
ð39Þ
) ek k�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ld2kminðQÞ
s:¼ X: ð40Þ
Let S denote the smallest level surface of V containing the
ball BX with radius X centered at e ¼ 0. If eðt0Þ 2 S then
the solution remains in S. If eðt0Þ 62 S then V is decreasing
as long as eðtÞ 62 S.
C. Rayleigh quotient
For a complex Hermitian matrix D and nonzero vector q
Rayleigh quotient RðD; qÞ is defined as
RðD; qÞ :¼ q�Dq
q�q; ð41Þ
where, q� is the conjugate transpose of q. For real matrices
the Hermitian matrix is symmetric matrix and conjugate
transpose becomes normal vector transpose qT . RðD; qÞreaches to its minimum value vminðDÞ (minimum eigen
value of D) when q reaches amin (the corresponding eigen
vector). Similarly RðD; qÞ has its maximum value vmaxðDÞ(maximum eigen value of D) when q is at amax (the
corresponding eigen vector). So, vminðDÞ�RðD; qÞ� vmaxðDÞ.
D. Parameter values
The nomenclatures are according to [14].
See Tables 2 and 3.
Table 2 Nominal values of parameters
m
kg
xG
m
yG
m
zG
m
Ix
kg-m2Iy
kg-m2Iz
kg-m2�X _u
kg
�Y _v
kg
490 0 0 0.012 17.1 632 630 49 836
264 J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265
123

References
1. R. Cristi, A.J. Healey, Adaptive identification and control of an
autonomous underwater vehicle, in Proceedings of the 6th
International Symposium On Unmanned Untethered Submersible
Technology, pp. 563–572 (1989)
2. T.I. Fossen, S.I. Sagatun, Adaptive control of nonlinear under-
water robotic systems, in Proceedings of the IEEE International
Conference on Robotics and Automation Sacramento, California,
pp. 1687–1695, (April 1991)
3. J. Yuh, An adaptive and learning control system for underwater
robots, In 13th World Congress International Federation of
Automatic Control, San Francisco, CA, pp. 145–150 (1996)
4. S.K. Choi, J. Yuh, Experimental study on a learning control
system with bound estimation for underwater vehicles. Int.
J. Auton. Robots 3(2/3), 187–194 (1996)
5. G. Antonelli, F. Caccavale, S. Chiaverini, G. Fusco, A novel
adaptive control law for underwater vehicles. IEEE trans. Control
Sys. Technol. 11(2), 221–232 (2003)
6. D.R. Yoerger, J.-J.E. Slotine, Robust trajectory control of
underwater vehicle. IEEE J. Oceanic Eng. OE-10, 462–470
(1985)
7. A.J. Healey, D. Lienard, Multivariable sliding mode control for
autonomous diving and steering of unmanned underwater vehi-
cles. IEEE J. Oceanic Eng. 18(3), 327–339 (1993)
8. R. Cristi, F.A. Papoulias, A.J. Healey, Adaptive sliding mode
control of autonomous underwater vehicles in diving plane. IEEE
J. Oceanic Eng. 15, 152–160 (1990)
9. F.A. Papoulias, R. Cristi, D. Marco, A.J. Healey, Modelling,
sliding mode control design, and visual simulation of AUV dive
plane dynamic response, in Proceedings of the 6th International
Symposium on Unmanned Untethered Submersible Technology,
pp. 536–547 (1989)
10. P.M. Lee, S.W. Hong, Y.K. Lim, C.M. Lee, B.H. Jeon, J.W. Park,
Discrete time sliding mode control of an autonomous underwater
vehicle. IEEE J. Oceanic Eng. 24(3), 327–339 (1999)
11. M.S. Naik, S.N. Singh, State-dependent riccati equation-based
robust dive plane control of AUV with control constraints. Ocean
Eng. 34, 1711–1723 (2007)
12. L. Lapierre, Robust diving control of an AUV. Ocean Eng. 36,
92–104 (2008)
13. S.N. Shome, S. Nandy, S.K. Das, D.K. Biswas, D. Pal, AUV for
Shallow Water Applications—some Design Aspects, International
Offshore (Ocean) and Polar Engineering Conference, ISOPE-
2008, Vancouver, BC, Canada, (July 2008)
14. T.I. Fossen, Guidence and control of ocean vehicles (Wiley,
London, 1994)
15. M.W. Spong, M. Vidyasagar, Robot dynamics and control
(Wiley, London, 1989)
Table 3 Variation of parameters for different Trajectory
Circular Figure of
eight shaped
Lawn mower
Dm 30abs(sin0.1t) 30 30, 0 B t B 25
20, 25 \ t B 50
10, t [ 50
DxG 0.05abs(sin0.1t) 0.05 0.05, 0 B t B 25
0.03, 25 \ t B 50
0.02, t [ 50
DyG 0.02abs(sin0.1t) 0.02 0.02, 0 B t B 25
0.01, 25 \ t B 50
0.005, t [ 50
DzG 0.02abs(sin0.1t) 0.02 0.02, 0 B t B 25
0.018, 25 \ t B 50
0.015, t [ 50
DIx 2abs(sin0.1t) 2 2, 0 B t B 25
1.5, 25 \ t B 50
1, t [ 50
DIy 5abs(sin0.1t) 5 5, 0 B t B 25
3.5, 25 \ t B 50
2.5, t [ 50
DIz 10abs(sin0.1t) 10 10, 0 B t B 25
7, 25 \ t B 50
5, t [ 50
�DX _u 3abs(sin0.1t) 3 3, 0 B t B 25
2, 25 \ t B 50
1.5, t [ 50
�DY _v 50abs(sin0.1t) 50 50, 0 B t B 25
35, 25 \ t B 50
25, t [ 50
J. Inst. Eng. India Ser. C (July–September 2013) 94(3):253–265 265
123




















