SHIP MOTION THEORY - TU Delft Repositories
24
THE DEPARTMENT OF RE AtiD T. Francis Ogilvie THE UNIVERSITY OF MICHIGAN COLLEGE OF ENGINEERING MINE ENGINEERING ARCH1EF No. 021 May 1969 Lab. v. Scheepsbouwkunde Technische Hogeschool Delft THE DEVELOPMENT OF SHIP MOTION THEORY
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of SHIP MOTION THEORY - TU Delft Repositories

THE
DEPARTMENT OF
RE AtiD
T. Francis Ogilvie
THE UNIVERSITY OF MICHIGAN
COLLEGE OF ENGINEERING
MINE ENGINEERING
ARCH1EF No. 021
May 1969
Lab. v. Scheepsbouwkunde
Technische Hogeschool
Delft
THE DEVELOPMENT OF
SHIP MOTION THEORY

DOCUMENTATiE : r2 1DATUM'
THE DEVELOPMENT OF SHIP-MOTION THEORY
T. Francis Ogilvie
s1TY e Department of Naval Architecture44,111rt+4 and Marine Engineering...me Col lege of Engineering=.0 4.. The University of Michigan
Ann Arbor, Michigan 481047811
rjsre HocinchooNo. 021
May 1969
Udeling Schee eepvaarthunde

PRFNACE
This report is written in the attempt to present an essentially
non-mathematical discussion of the analysis needed to predict the heave
and pitch motions of a ship in head seas. About half of the report is
devoted to a description of the basic assumptions used by previous inves-
tigators, explaining their logic and showing why their results had to be
abandoned by engineers. The remainder concerns the assumptions which
have recently been found to lead to quite reasonable predictions; these
hopefully may soon become available to the ship designer.
The actual mathematical analysis is very complicated, and we hardly
hint at it here. The details may be found in Ogilvie & Tuck (1969),which should be released very soon, and in Ogilvie (1969), which is in
preparation. Corresponding computer programs are under development.
May 1969 T. Francis OgilvieAnn Arbor, Michigan

INTRODUCTION
A heaving and pitching ship behaves qualitatively like a two-degree-
of-freedom spring-mass system with fairly heavy damping. This is quite
obvious if one gives a ship model a heave or pitch displacement from its
equilibrium configuration and then releases the model; it oscillates a
few times with rapidly decreasing amplitude and then comes to rest. A
frequency-response experiment shows the same qualitative behavior; for
example, a plot of heave amplitude/wave height indicates the presence of
a resonance condition, with typical spring-mass-system behavior above and
below the resonance frequency.
This analogy is only qualitative. Golovato (1959) showed many years
ago that the response in a transient pitch experiment could not be
matched by the simple exponential-decay curves which are typical for the
response of a spring-mass system, and the usual equations of motion for
sinusoidal excitations involve coefficients which are functions of fre-
quency. Nevertheless, the general features of a damped resonant system
are present, and a successful theory for predicting heave and pitch
motions must include such features.
This report is essentially an account of the search for such a
theory. The modified strip theory developed primarily by Korvin-Krou-
kovsky (1955) includes all of the necessary components, and his theory has
been quite successful in its predictions. Nevertheless, it is not that
kind of theory which is to be discussed, for Korvin-Kroukovsky's approach
was strictly an engineer's approach. He patched together all of the con-
cepts which he thought to be significant and produced formulas corres-
ponding to each of the pieces. What I shall discuss is the attempt to
derive a satisfactory perturbation theory for ship motions beginning with
a precisely stated boundary-value problem, that is, the most nearly exact
mathematical model of the system possible. Such a model is easily pro-
duced, but it is intractable, and so one must develop an appropriate
procedure for obtaining an approximate mathematical model with the essen-
tial properties of the physical system. This is done by introducing an
-1-
4-

- 2 -
appropriate small parameter and using it consistently to simplify the
exact problem. When the appropriate small parameter has been found,
along with its relationship to several variables and parameters in the
overall problem, one has only to analyze the logical consequences of
treating that parameter as being vanishingly small. Then the predictions
which result must be tested against experiment, for there is no other way
of being sure that the exact solution of the approximate problem will be
the same as the approximate solution of the exact problem.
A considerable portion of the report is devoted to discussing the
history of some unsuccessful attempts to establish the appropriate approxi-
mate mathematical model. This discussion provides a considerable amount of
insight into the nature of the model which is finally adopted and which
appears now to be leading to generally correct predictions. The funda-
mental modifications in assumptions from theory to theory are quite small,
but the discussion points up how slowly these necessary changes have been
recognized.
Following this history, there is a discussion of some consequences of
adopting the most recent model. Some of the results are as expected, but
others are somewhat surprising.
The required comparison with experiments is given short shrift for
two reasons. On the one hand, most of the final formulas are rather similar
to those of the modified strip theory, which has been compared with experi-
ment many times; the new analysis should not give grossly different answers.
On the other hand, the aspects in which the new results differ from strip
theory have not been subjected to thorough numerical analysis, and so it is
not yet clear just how much difference there really is.
The details of the most recent analysis are not presented herein; only
their rational basis is discussed. The complete analysis may be found in
Ogilvie & Tuck (1969) and in Ogilvie (1969).As a final introductory note, it should be mentioned, that we are
treating only the case of heave and pitch motions in sinusoidal head seas.
The extension to irregular seas is straightforward provided that the sea
state is not extreme and provided that the hull geometry does not accen-
tuatenonlinear phenomena. Under these circumstances, it has been amply

demonstrated that a simple superposition of sinusoidal waves and sinu-
soidal motions yields valid results. Other degrees of freedom and other
headings with respect to incident waves have not been satisfactorily
analyzed yet.
FORM OF THE EQUATIONS OF MOTION
The equations of motion for coupled heave and pitch are often
written as follows:
(m+a) + 1,1* cz. + d.E; + e9 + gf). = F( t.)
(A+I)a + Be' + ce + ft. + Ei Gz M(t) ;
t = z(t) = heave displacement;
9 = 9(t) = pitch rotation;
F(t) . heave force due to external causeb;
M(t) pitch moment dueto external causes;
m. mass of ship;
I .= moment Of inertia of ship about pitch axis.
The other coefficients correspond to added masses, damping coefficients,
and restoring-force coefficients. In. thisreport, we shall generally use
the following indicial, notation to reexpress the same equations:
_+a. .) t _ E . + 0.. Fi(t) ; = 3,5. (11.)la j 1J Jj
In this notation,, 't3(t)z(t)and5(t) e(t) ; clearly the meaning
'can be extended to more degrees of freedom.,, but we shall here interpret
the sum to be taken over j, only. 'If the products of inertia are
zero, as implied. in Equations (1), then; m._ =0 for 1 j . Note thatij
F5(t)denotes.. a Moment, and
m55denotes a moment of inertia.
The equations above are not really equations of motion, of course,
(1)
3
+
=
=
= 3,5

-4
since they are valid only if the excitation terms are sinusoidal in time.
Thecoefficientsaijandb.are all functions of frequency, (4) .ijHowever, we may interpret the equations as a description in the frequency
domain, and then they are valid for arbitrary motions, through the use of
Fourier-integral and generalized-harmonic-analysis techniques. See
Ogilvie (19O4). We shall include in thec.j j
terms only those forcesiwhich are dependent strictly on displacement; such forces do not depend on
frequency. All frequency-dependent forces are included ina.j j
andib. . Such a convention is required to make the coefficients unique.
It should be noted thata33
anda55
are of the same order of
magnitude asm33
andm55
, respectively. This may be taken as an
experimentally observed fact. Also, the coefficients must have values
such that free oscillations are highly damped.
From an engineering point of view, the equations above are quite
reasonable. They include the qualities generally evidenced by a heaving
and pitching ship, as already mentioned in the Introduction. But they do
no good unless we can calculate the individual terms. Therefore we now
consider some of the approaches which have been used in solving the hydro-
dynamic problem.
Thin-ship idealization (one parameter). Peters & Stoker (1954) took
advantage of the simplicity of the thin-ship idealization to develop a
complete, mathematically consistent description of heave and pitch motions
in head seas. They argued that the oscillation problem must be superposed
on the steady-motion problem, and approximations must be made in such a way
that both problems are simplified simultaneously. In view of the long
history of thin-ship theory for the prediction of wave resistance, it was
natural that they should try representing the ship in the Michell-Havelock
manner even for the unsteady problem. A special advantage of this approach
is that the body boundary condition is easily satisfied; there are no
integral equations or singular perturbation problems to be solved. Once
the boundary condition is written down for the ship hull, the solution of
the linearized problem follows almost trivially.

-5
Peters and Stoker assumed that there is a "thinness" paramater, say
, which may be thought of as the beam/length ratio or, more accurately,
as the maximum slope along any waterline. It is often convenient to think
of the ship length as being a quantity which is 0(1) as beam approaches
zero, in which case we may write:
beam = 0() (2a)
There are two other quantities which one would expect to be small in
a linear theory of ship motions, namely, the amplitude of ambient waves
and the amplitude of ship motions. Peters and Stoker assumed simply that:
motion amplitude . 0(6) ; (2b)
wave height = 0(8) . (2c)
Assumption (2a) allows us to recover the Michell-Havelock thin-ship
theory for wave resistance in the absence of oscillatory motions, and
assumptions (2b) and (2c) lead to the development of solvable, linear
boundary-value problems for the prediction of hydrodynamic disturbances
caused by the oscillating ship in waves. In fact, the above assumptions
allow one to formulate a sequence of problems from which even nonlinear
effects can be calculated, although one never encounters the need to solve
an actual nonlinear boundary-value problem.
But there is a rub when we consider the equations of motion which
result from these assumptions. The orders of magnitude of several of the
terms in (1') can be estimated easily:
F.(t) (wave height).(waterplane area) = Oki5 ) . (3a)
This part of the generalized exciting force requires only a buoyancy
calculation, from which the estimate follows directly. There will also be
higher-ordercontributionstoF.(t) caused, /or example, by the diffrac-ition of the incident waves, but we are considering now just the lowest-order'
parts. The restoring-force terms are similarly calculated from buoyancy
considerations:

-6
hydrodynamic force (water disturbance).(waterplane area)
. (3d)
Thus, the hydrodynamic-force terms are higher-order than those terms
estimated in (3a)-(3c), and so they do not belong in the lowest-order
equations of motion. The first approximation to the equations of motion
is accordingly:
[ra+ c.. = Fi(t) .
lj j 1J J
(Cf. (1').) There is no damping and there are no added masses; the water
provides only the restoring forces, -c.. . . Because of the lack ofj
(4)
c. (t) -a (motion amplitude)-(waterplane area) = 0(02) . (3b)
The terms involving the inertia of the ship are:
m. . j(t) (mass ot ship).(motion amplitude) ()1k2) (3c)ij
(Thelastrelaticrl10110wsfromthefactthatm..-"(length)-(depth).(beam)ij
. 0(5) . In thin-ship theory, depth or draft is not to be considered as a
small quantity.) Thus, the terms above are all of the same order of magni
tude.
It is different with the hydrodynamic-force terms, but it requires a
bit more argument to show wiw. The water disturbance which results from
the ship motions is proportional to (amplitude of motion)-(waterplane area) .
By "water disturbance" is meant fluid velocity components, pressure tluctu
ations, velocity potential, and so on. Similarly, the water disturbance due
to the presence of the snip in the ambient waves varies like (wave height
(waterplane area) . Thus, in both cases the disturbance is 002) . The
force on the ship from such disturbances must be tound by integrating the
pressure appropriately over the hull surface. Since only vertical compo-
nents of force will matter for heave and pitch, the pressure must be multi
plied by the direction cosine of the hull normal vector with respect to the
vertical reference axis. Then, in effect, the pressure is integrated over
an area which is comparable with the waterplane area, and it follows that:
.^0
=

7
added mass, Equations (4) predict resonances at highly erroneous frequen-
cies, and, because of the lack of damping, they predict arbitrarily large
amplitudes of response near the resonance frequencies.
Both of these results are unacceptable, of course, for engineering
purposes. There is also a difficulty in principle mathematically, for it
was assumed initially that the entire disturbance caused by the ship is
very small, and yet the disturbance can be infinite in amplitude. There is
no fault to be found in the way in which Peters and Stoker worked out the
consistent expansion. Rather, the original assumptions must be re-examined,
and several approaches are possible.
Inconsistent thin-ship model. Haskind (1940 had already formulated
the ship-motions problem for a thin ship some years before the work of
Peters &Stoker (1954). However, Haskind made no attempt to develop a
consistent perturbation analysis. Rather, he simply assumed that the
ship was thin enough that the appropriate boundary-value problem could
be formulated, he solved that problem, and he included the resulting
damping and inertial effects in his equations of motion. Mathematically,
his approach is unsatisfactory, since he includes some terms which are
0(183) but he makes no pretense of finding all terms of that order of
magnitude. From an engineering point of view, his results are more satis-
factory than those of Peters and Stoker. Thin-ship predictions of added
mass and damping are not too bad, compared with experiment, and it is cer-
tainly preferable to have some estimate of these effects rather than to
relegate them to a higher-order approximation. (In fact, it should be
observed that the anomalous results of Peters and Stoker cannot be corrected
by using a higher-order theory. By definition, the next order of approxima-
tion must involve perturbations which are small compared to previous-order
terms, and so they can never eliminate the infinities in the lowest-order
theory.)
Multi-parameter thin-ship idealization. Newman (1959) remedied the
difficulty in principle of the Peters-Stoker analysis by introducing three
small parameters: beam, motion amplitude, and incident wave height. Not

8 -
all three are independent; motion amplitudes must be small, and near
resonance this requirement produces a relation between the other two
parameters. Newman obtains in fact a different lowest-order problem near
resonance from the problem away from resonance. Unfortunately, it has not
been found feasible to use Newman's results for practical purposes.
Flat-ship idealization. The entire problem can be linearized in an
entirely different way by assuming that the ship is thin in its vertical
dimensions. This approach has the attraction that it more nearly corre-
sponds to the realities of shipbuilding practice than does the thin-ship
model. Also, it has been recognized for many years that it eliminates in
principle the difficulties found above in the thin-ship model (as least
for the modes of vertical motion). However, there is another difficulty
introduced here: It becomes necessary to solves. singular integral
equation in two dimensions. This fact alone held up the development of
flat-ship theory for many years and will probably continue to make it use-
less for practical ship-motions problems in the foreseeable future.
Slender-body theory. Starting with the work of Vossers (1960),
another approach was intensively investigated during the early 1960's,
namely, assuming the ship to be small in both beam and draft. The result
of applying such an assumption is very interesting in terms of the consis-
tent mathematical analysis developed by Peters and Stoker. There is one
principal change wrought in the lowest-order equations of motion: The
inertia terms disappear altogether. This happens because ship mass is
now 0(2) , and so the inertia terms are 0(33) , while the excitation and
static restoring forces still depena primarily on waterplane area and are
thus still O(j20 ) . The equations of motion become simply:
cij = Fi(t) . (5)
The mass of the ship re-enters the problem in the second-order theory, at
which point the hydrodynamic forces also appear.
It may appear that Equations (5) are too trivial and lack too many of
the required system properties to be even worth considering. But this is

-9
not necessarily true. What Equations (5) really say is that, to a first
approximation, the displacements in heave and pitch are determined by the
springconstants,c...A second-order theory would predict typicalij
resonance-type responses, since ship mass, water inertia, and wave damping
all appear at that stage of approximation. All that is required in principle
is that such resonance phenomena should involve disturbances which are small
compared to those implied by (5).
For a typical ship in a typical seaway (head seas only), these condi-
tions are in fact satisfied if the ship has zero forward speed. This was
shown by Newman 8: Tuck (1964), from whose paper Figures 1 to 4 are repro-
duced. The information presented concerns an unspecified aircraft carrier.
In Figures 1 and 2 are shown the heave and pitch response-amplitude opera-
tors, as found experimentally and as predicted by Equations (5). For fre-
quencies less than 0.6 cycles per second, the agreement between experiment
and theory is remarkably good.
Impressive as this agreement may be, it is somewhat of an accident.
It may be noted that there is a scatter of data at higher frequencies, but
nevertheless there is a clear suggestion of the existence of secondary
peaks in the response curves. These are not predicted by the lowest-order
theory. What is really happening physically is this: The pitch and heave
resonance frequencies lie in this high-frequency region. Incident waves
of such frequencies are rather short compared to ship length, and so they
produce little net excitation of either heave or pitch motion. Most of the
excitation occurs at low frequencies (longer waves), well below resonance,
for which the system is essentially spring-controlled. Thus, the derivative
terms in the equations of motion are small because: (a) at high frequencies,
F.(t) is very small, and, (b) at low frequencies, differentiation of
effectively multipliesi by co , the frequency, making successive
derivatives smaller and smaller.
The situation is altered when the ship has forward speed, as shown in
Figures 3 and 4. An incident wave of any given frequency of encounter now
has a longer wavelength, and so it may be expected to have greater effec-
tiveness in exciting heave and pitch. In particular, the high-frequency
disturbance which caused the secondary peaks in Figures 1 and 2 are now

12
- 10 -
.2 .4 .6 .8 10
Frequency in cyc les per second
Fig. 1 - Pitch response calculated from firstorder theory and compared with zero speedexperimental data
.2 .4 .6 .8 10 12
Fr equncy in cyclic per second
Fig. 2 - Heave response calculated from firstorder theory and compared with zero speedexperimental data
1,1
T14,
o
LI ULARREG
0 TRANSIENT
LEGEND
,
THEORY
WAVES
1
TEST
,
-
o
o
o 6ao
REGULAR
0 TRANSIENT
LEGEND
THEORY
WAVESTEST
----
o o pi
o
aDo
a o0o
o
.8
.6
.40
00
0-a
.2
.6
.4
.2
.8
-
.
-
--

1.8
1.6
2
.2 .4 .6 .8 1.0 12
FREQUENCY IN CYCLES PER SECOND
Fig. .3 - Pitch response calcu-lated from first order theory andcompared with experimental dataat 0.14 Froude number
.2 .4 .6 .8 1.0
Frequency in cycles per second
Fig. - Heave response calculated from firstorder theory and compared With experimentaldata at 0.14 Froude number
I
A REGULAR
- THEORY
'LEGEND
-!----
I
1
gr
WAVESTEST
-1-
°tO.,0c. ' o ,
-1
-o
o
IC
0
LEGEND
REGULARTRANSIENT
1 1
WAVESTEST
THEORY00 A0 ,t, 0 0CAA
A0-
00
4 o9)oo.,,
0,-0 '.. 0
ad
1.2
1.0
.8
.6
.4
.2
-
00
.4 -
o
At

- 12 -
much larger and they cause quite large motions in the band around resonance.
The theoretical curves in Figures 3 and 4 are calculated just as in Figures
1 and 2, the only correction being an allowance for the Doppler shift in
frequency caused by the relative motion of ship and waves. It is clear that
the error in the lowest-order theory is quite considerable, particularly at
the higher frequencies (near resonance).
Presumably, a second-order theory would correct some of this discre-
pancy. Newman and Tuck showed that at zero speed the second-order theory
made little change. Unfortunately, in order to obtain the second-order
results with forward speed included, one must solve the complete second-
order problem. That fact reduces the utility of this approach greatly,
even if the results were highly accurate. No one has yet succeeded in
making this into a practicable procedure.
High-frequency slender-body theory. We have seen that the first
attempt to use slender-body theory has not been successful for predicting
ship motions. It is also clear that the situation will not be improved
unless we retrieve the inertia terms, so that resonances are predicted,
but we must do this in a manner such that added-mass and damping terms
also appear in the lowest-order theory. We find that these objectives
can be reached if we make explicit use of the fact that we are seeking to
raise the relative importance of the derivative terms. We do this by
inking one more order-of-magnitude assumption:
00-1/2) (6)
Formally, it is readily shown that this does indeed bring the inertia
terms back into the lowest-order equations:
, .
mij j = 0(mass of ship)0( .)*Oku)2)J
= 002).00).00-1) = 002) .
Thus, the inertia terms are the same order of magnitude as the exciting
forces and the restoring forces.
Before considering the effect of this assumption on the hydrodynamic-
force terms, let us digress a moment to consider the meaning of the assump-

- 13 -
tion. The previous order-of-magnitude assumptions have all been made in
terms of quantities with length units. It is natural to ask how one may
relate a quantity measured in units of time to other quantities which have
length units. The answer lies in the relationship between the frequency of
a iree-suriace wave and its wavelength. It is easily found that, if a wave-2,
motion has irequency = 1/) it has a wavelength A = c(ii) .
Thus the assumption concerning implies that corresponding waves have
length comparable to ship beam.
For the ship with no forward speed, this implication may be taken in
the obvious way. Strictly, the theory pertains to situations in which the
incident waves are very short. In Figures 1 and 2, we would be concerned
with the extreme right-hand portions of the data.
For the ship with forward speed, the interpretation is not so obvious.
The frequency (..) is the frequency of encounter, that is, the actual fre-
quency of oscillation. If the ship is moving with speed U into head waves
which have a frequency (,30 in an earth-fixed reference frame, the frequency
of encounter will be:
= (JO ULJ12/01g(7)
In order to find the order of magnitude of the wavelength of the incident
waves, we must solve (7) for k.)0 in terms of The result is:
_ + A2U
gt g2
U4112
'(8)
For large (A) , the right-hand side is dominated by the term containing
Lc; and so we find that:
LAO = 0(t; -1/4) (9)
The usual relationship between frequency and wavelength then shows that
the incident waves are long compared with ship beam and short compared
with ship length. Note that we have tacitly assumed that the quantity
g/U can be treated as a quantity which is 0(1) .
Thus it appears that the new assumption, that w= Oc6-1/2)
restricts the results to short waves in any case and to extremely short
waves in the case of zero forward speed. Whether this is as serious as
,
,

- 14 -
might appear is not entirely clear. We shall return to the question when
we consider further implications of the new basic assumption.
Now we return to a consideration of the hydrodynamic-force terms., 2
We shall find that the leading-order terms are 00 ) , and so they must
be included in the lowest-order equations of motion.
We may expect the fluid velocity components and the velocity potential
to vary directly with the vertical velocity component of the ship and with
the waterplane area:
Fluid disturbance
-a (vertical velocity component of ship)(waterplane area)
= 0(64))O) = 003/2) . (io)
In linearized theory, the pressure is given by the product of fluid density
times the partial time derivative of the velocity potential. Thus:
pressure = 0(aPi9) = 0() .
As before, we obtain the hydrodynamic force by integrating the pressure
over an area which has the order of magnitude of the waterplane area:
hydrodynamic force ^, (preesure).(wateriolane area) = O(g2) . (12)
Thus, the hydrodynamic force has the same order of magnitude as the pre-
viously considered terms in the equations of motion, and the equations
must then be of the form of Equations (1) or (1').
This is the result we set out to find. We see that the high-frequency
( slender-bodyapproximation is the only approximation considered that leads
consistently to a set of equations of motion which has the basic form that
observations say it must. Whether the assumptions lead to correct values
of the coefficients in the equations is another matter altogether which
cannot be answered by these order-of-magnitude arguments.

- 15 -
CONSEENCES OF THE HIGH-FREQUENCY SLENDER-BODY ASSUMPTIONS
First we should recall for a moment the role of small parameters in
formulating approximate boundary-value problems. The small parameter is
just &convenient device which provides a means of deciding what terms are
most important and what terms may be neglected in a first approximation (or
in subsequent approximations). One never knows a priori how small the
parameter must be for the results to have any specified degree of validity.
Indeed, it may not have to be small at all. One may make an analogy to a
Maclaurin series: The fact that we represent a function by a power series
in, say, z does not mean that the series is necessarily valid only for
small iz1 . The series might converge for any
On the other hand, our series might not converge for any value of the
small parameter. We may have an asymptotic series on our hands. We simply
do not know, and there is not much likelihood of our finding out in any
rigorous way what properties our series may have. We just use the series
and observe whether the results agree with observation.
In accordance with usual practice, the small parameter never appears
in our final formulas. We assume that all quantities can be expressed in
asymptotic series in terms of the small parameter, and we use this assump-
tion to order all terms that appear in each equation. When we have
decided how many terms to retain in any particular expansion (usually not
more than one or two), we drop the rest and solve the remnant of the problem
as nearly exactly as we are able. The fact that each term is assumed to be
of a certain order of magnitude is now thoroughly camouflaged. The fact
certainly does not appear explicitly in the final formulas.
After this discussion, we should not be terribly surprised if the
analysis gives fairly accurate results even in some cases in which the
order-of-magnitude assumptions appear to be violated (although it would
be naive to start out hoping that this would be the case).
Such a case occurs in this problem. At zero speed, we have observed
that the theory can be expected to be valid only for extremely short-,waves, for which w= 001/2) and A. = 0(4) . However, it has been
found that the theory gives rather good predictions even for low frequen-
cies. We do not have to look far to find the reason. At low frequencies,

- 16 -
the terms in the equations of motion which involve time derivatives are
numerically small, simply because they involve factors containing c,) .
Thus, even though these terms were retained because of the high-frequency
assumption, they have little effect. We would have found the same equations
of motion if we had assumed that op = 0(1) and then inconsistently included
some higher-order terms. After all, there is no real harm in being incon-
sistent and keeping some higher-order terms if the higher-order terms are
really very small. For low frequencies and zero speed, all that matters
is that we correctly predict exciting and restoring forces.
It is tempting next to speculate that the same result may occur for
forward-speed problems. We have observed that the basic assumption requires
that incident wavelengths be large compared with ship beam and small com-
pared with ship length. The latter restriction is certainly objectionable,
because it is well known that maximum ship motions usually occur in waves
of length comparable to ship length (or somewhat longer than ship length).
Can we reach the same conclusion that the theory will still be valid even
for moderate frequencies, such that wavelength is comparable with ship
length? Only with some qualification. The character of the waves generated
by ship motions and by diffraction of incident waves changes grossly from
very low speed and/or frequency to high speed and/or frequency. At zero
speed, it is intuitively clear that waves are radiated in all directions.
However, at high speeds the motion-generated waves are included within a
wedge-like region behind the ship. The difference in the character of these
wave systems suggests that the problem solution will also show a correspond-
ing difference.
The boundary between these regimes is marked by the parameter 1.7 =c4U/g
-2.having a value of 1/4 . With our assumptions, 17 = 001/ ) , and so our
theory is a "high-7" theory. If speed is high enough, the theory will
possibly be good down to fairly low frequencies, but certainly the frequency
cannot approach arbitrarily close to zero. For = 1/4 , there will be
infinities in the higher-order solutions, at least, and so we must consider
the whole analysis void. It is not possible to say how closely we may
approach Z = 1/4 from above and still have any usable results. The
behavior of the system near this singularity is probably rather well-behaved
except in a very small neighborhood, and so we may hope to get down even to
F
F

.= 17 =
the range in which, say, 1: -= 0.3 But there is only one way to find
out by trying it.
At present it is not possible to reach, A Conclusion on this matter
even if we make a great many calculations, because the system behavior at
small values of t makes experiments very difficult. Near 7.7,= 1/4
the radiated waves move &Way in part nearly broadside from the ship, and
tests in ordinary towing tanks are subject to great wall-effect errors.
We badly need some definitive experiments at low speed and low frequency'
in abroad seakeeping basin.
The result of applying the high-frequency slender-body assumptions
is a modified strip theory. The arguments leading up to (12) pertain
only to the lowest-order hydrodynamic effects; the added-mass, and -
damping forces are those which would be obtained in the most ,naive strip,
analysis, and the same is true of the exciting forces. That is, they
contain no effects of forward speed*. Although they do represent the
qualitative properties of the heaving/pitchingship in waves, the effects
of forward speed are not negligible. Therefore it is desirable to inves-
tigate the next order of approximation, and the availability of the small
parameter for ordering all quantities makes this in 'principle a rather
reasonable task, As it turns out, even in practice it can be done, and
several consequences are found':
,A fluid disturbance is found .which may be interpreted as a
coupling between the steady flow around the hull and the oscillations Of
the hull, This part arises analytically in requiring that the hull
boundary condition be satisfied on the exact, instantaneous position of the
hull; since the steady-motion boundary condition is satisfied on the -mean
position Of the, hull, a correction to the steady-motion velocity field
arises. The resulting 'hydrodynamic force id found to be 0(S5/2)
This suggests that, notwithstanding the previous discussion, these termsmay yield a valid first approximation for all values of If . Nevertheless,this is doubtful, for the singularities at T 1/4 which appear in thesubsequent terms of the approximation cannot be ignored.
.
--
(1)
=
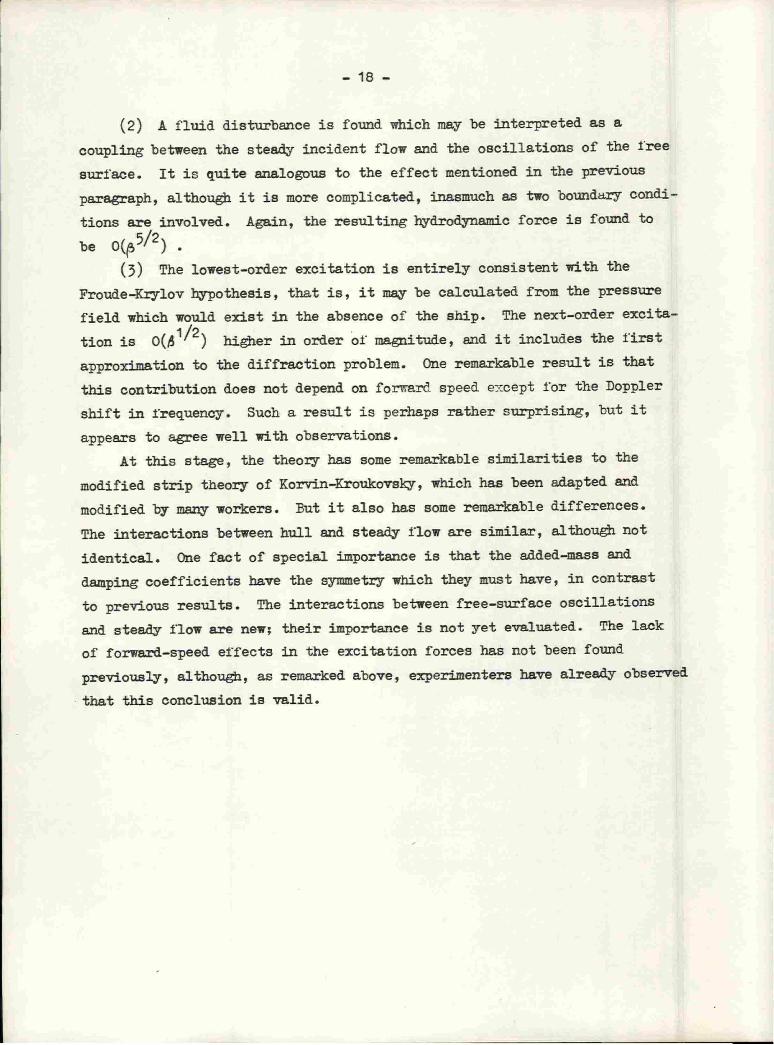
-18 -
A fluid disturbance is found which may be interpreted as a
coupling between the steady incident flow and the oscillations of the free
surface. It is quite analogous to the effect mentioned in the previous
paragraph, although it is more complicated, inasmuch as two boundary condi-
tions are involved. Again, the resulting hydrodynamic force is found to
be 0((55/2) .
The lowest-order excitation is entirely consistent with the
Froude-Krylov hypothesis, that is, it may be calculated from the pressure
field which would exist in the absence of the ship. The next-order excita-
, ,
tion is 001/2 ) higher in order of magnitude, and it includes the first
approximation to the diffraction problem. One remarkable result is that
this contribution does not depend on forward speed except for the Doppler
shift in frequency. Such a result is perhaps rather surprising, but it
appears to agree well with observations.
At this stage, the theory has some remarkable similarities to the
modified strip theory of Korvin-Kroukovsky, which has been adapted and
modified by many workers. But it also has some remarkable differences.
The interactions between hull and steady flow are similar, although not
identical. One fact of special importance is that the added-mass and
damping coefficients have the symmetry which they must have, in contrast
to previous results. The interactions between free-surface oscillations
and steady flow are new; their importance is not yet evaluated. The lack
of forward-speed effects in the excitation forces has not been found
previously, although, as remarked above, experimenters have already observed
that this conclusion is valid.

-19-
REFERENCES
Golovato, P. "A study of the transient pitching oscillations of a ship,"Journal of Ship Research, 2:4 (1959) 22-30.
Haskind, M. D. "Oscillation of a Ship on a Calm Sea," Bulletin of theAcademy of Sciences of the USSR, Technical Sciences Class, 1 (1946)23-34. Translation available in: T&R Bulletin No, 12, Society ofNaval Architects and Marine Engineers, New York.
Korvin-Kroukovsky, B. V. "Investigation of Ship Motions in Regular Waves,"Trans. Soc. of Nay. Arch. & Mar. E., 63 (1955) 386-435.
Newman, J. N. A linearized theory for the motion of a thin ship inregular waves, M.I.T. doctoral dissertation (1959). Reprinted:Journal of Ship Research, 541 (1961) 34-55.
Newman, J. N., Tuck, E. O. "Current Progress in the Slender-Body Theoryof Ship Motions," Proc. Fifth Symposium on Naval Hydrodynamics, Bergen,Norway, Sept. 1964. Office of Naval Research ACR/112, Washington.
Ogilvie, T. F. "Recent Progress Toward the Understanding and Prediction ofShip Motions," Proc. Fifth Symposium on Naval Hydrodynamics, Bergen,Norway, Sept. 1964. Office of Naval Research ACR/112, Washington.
Ogilvie, T. F., Tuck, E. O. A Rational Strip Theory of Ship Motions:Part I, Report No. 013, Dept. of Naval Architecture and Marine E/Agi/leering, University of Michigan, Ann Arbor (August 1968).
Ogilvie, T. F. A Rational Strip Theory of Ship Motions: Fart II, in prepa-ration.
Peters, A. S., Stoker, J. J. The Motion of a Ship, as a Floating RigidBody, in a Seaway, Report No. IMK-203, Inst. of Math. Sci., New YorkUniversity, New York (1954). Also: Comm. Pure &Apol. Math. 10(1957) 399-490.
Vossers, G. Some Applications of the Slender Body Theory in Ship Hydro-dynamics, Dissertation, Tech. University, Delft (196077 Also:Publication No. 214, Netherlands Ship Model Basin, Wageningen (1962).

000 SERIES PUBLICATIONS
001 "Computer-Aided Ship Design," Edited by Robert S. Johnson,
Horst Nowacki and T. Francis Ogilvie, Course Notes, May
1968--$18.
002 "Wave Resistance: The Low-Speed Limit," by T. FrancisOgilvie, Aug. 1968--No Charge.
003 "The Economics of the Container Ship Subsystem," by Dave
S. Miller, Oct. 1968--$2.
004 "Analysis and Statistics of Large Tankers," by Virgil F.
Keith, Oct. 1968--$1.
005 "Reactions on Independent Cargo Tanks," by Finn C. Michelsenand Ullmann Kilgore, Sept. 1968--$1.
006 "Experiments on the Resistance of a Family of Box-likeHull Forms for Amphibious Vehicles," by Horst Nowacki,
J. L. Moss, E. D. Synder, and B. J. Young, Sept. 1968--
No Charge.
007 "Measures of Merit in Ship Design," by Harry Benford, Feb.
1968--$2.
008 "The Control of Yaw in Towed Barges," by Harry Benford,Presented at the Gulf Section of SNAME, 1955--$1.
009 "Economic Criteria in Fish Boat Design," by Harry Benford,Presented at the Conference on Fishing Vessel ConstructionMaterials, Montreal, Oct. 1968--$1.
*010 "On the Steady-State Ship Hull Response," by Horst Nowacki,Presented to the Sociedade Brasileira de Engenharia Naval,Rio de Janeiro, Aug. 1968--$1.
*011 OUT OF PRINT: "Feasibility Study of a Subseatrain," by WilliamWhite and George Lamb, presented at the San Diego Section ofSNAME, Feb. 1969, $2. For further information, please writeProf. Harry Benford, Dept. of Nay. Arch. and Mar. Eng.445 W. Eng., U of M., Ann Arbor, Michigan 48104
012 "The Practical Application of Economics to Merchant ShipDesign," by Harry Benford, Reprinted from Marine TechnologyVol. 4, No. 1, Jan 1967, (Also available in Spanish)
Feb. 1969--$1.
*013 "A Rational Strip Theory of Ship Motions: Part I," by T.Francis Ogilvie and E. 0. Tuck (To be available July 1969).

- 2 --
*014 "Ferro-Cement with particular reference to Marine Applications,"by Charles Darwin Canby, presented to the Pacific NorthwestSection of SNAME, March 1969--$2.50.
015 "The Cost Savings of Multiple Ship Production," by John C.Couch, reprinted from AACE Bulletin, Vol. 6, No. 2, 1964
pp. 50-58--$0.50.
*016 "The Engineer's Role in Managing Marine Transport Systems,"by Hugh C. Downer, remarks to the Quarterdeck Society,March 28, 1969--No Charge.
017 "Notes on the Design and Operation of Automated Ships,"by Harry Benford, Seminar on the Labor Problems Resultingfrom Automation and Technological Changes on Shipboard,
Sept. 1965--1.
*018 "Class Notes on Computer-Aided Ship Design," Used for graduatecourse NA 574, by Horst Nowacki, April 1969--$7.00
*019 "Shallow-Water Performance of a Planing Boat," by Andras
Istvan Toro, presented at the Southern Section of SNAME,April 1969 (To be available July 1969)--$2.
020 "Hydrodynamic Aspects of Tracked Amphibians," by Ullmann
Kilgore, Presented at the First International Conference
on Vehicle Mechanics at Wayne State University, 1968
(To be available July 1969)--$2.