Quadcopter nedir, nasıl uçar ?
83
1 1. GİRİŞ İnsansız hava aracı (İHA) hava akımı ve tahrik kuvvetlerinden yararlanarak uçabilen yerden kumanda edilen ya da otonom yani belli bir uçuş planı üzerinden otomatik hareket eden, uçuş için içerisinde bir pilota ihtiyaç duymayan hava aracı tipidir. İHA’lara yerden kumandalı hava aracı manasına gelen “drone” da denilmektedir [1]. İlk İHA 1916 senesinde Archibald Low tarafından geliştirilmiştir. İlk kez 1. Dünya Savaşı’nda sınırlı sayıda üretilen Hewitt-Sperry otomatik uçakları savaş alanlarında kullanılmıştır. Günümüzde özellikle savunma alanında talebin arttığı bir sistem olmakla birlikte, üzerine olan çalışmalar gün geçtikçe artmaktadır. Esas olarak keşif amaçlı üretimleri yapılan İHA’lar saldırı amaçlı da kullanıldıkları için ülkelerin ana araştırma konusu arasına girmiştir. Fakat birçok sivili vurması da başarısız yanlarının olduğunu, üzerine daha fazla çalışılması gerektiğini göstermektedir. Bu tarz araçlar başta askeri araştırmalarda keşiflerde olmak üzere uzaktan algılama, jeofizik araştırmaları, güvenlik, taşıma ve yangın söndürme gibi birçok farklı alanda kullanılabilmektedir. İnsanlar için daha da önemlisi yetiştirilmesi zor pilotlar için çalışma alanı tehlikeli olan ortamlarda kullanımları artmaktadır. İHA'lar avuç içi büyüklüğünden, kanat açıklığı 20 m boyu 10 metrelere ulaşan ebatlarda farklı amaçlar için kullanılabilecek şekilde olabilmektedirler. Elden atılan modellerinin yanı sıra elektrik motoru, jet motoru ya da piston motoru kullanan modelleri mevcuttur. Kullanım alanlarına göre yükselebilecekleri irtifa değerleri de değişmektedir. Menzillerine ve kullanılan motor tipine göre İHA’lar arasında sınıflandırmalar yapılmıştır [2]. Günümüzde İHA kategorisi içerisinde dikey iniş-kalkış yapabilmesinden, basit yapısından ve havada asılı kalmasından dolayı multikopter sistemleri rağbet görmektedir. Multikopter sistemleri çok motorlu insansız hava araçları olarak tanımlanır. 3-4-6-8 motorlu üretilen multikopterler stabil uçuşlar ve özellikleri sayesinde izleme, arama kurtarma ve savunma alanında İHA’lar arasında ilk sıralar da yerini almaya başlamıştır. Özellikle qoadrotor (quadrokopter) üzerine yapılan çalışmalar bu sistemler içerisinde fazlalık göstermektedir. Kontrol yapısının karmaşık olması gelişimlerini yavaşlatsa da son birkaç sene içerisinde farklı alanlarda kullanımları yaygınlaşan quadrotor sistemleri ülkemizde keşif ve görüntüleme hizmetleri için kullanılmaya başlanmıştır. Dolayısı ile üzerine olan çalışmalar ve farklı modellemeler sayesinde savunma amaçlı kullanımları yadsınamaz bir gerçektir.
Transcript of Quadcopter nedir, nasıl uçar ?

1
1. GİRİŞ
İnsansız hava aracı (İHA) hava akımı ve tahrik kuvvetlerinden yararlanarak uçabilen
yerden kumanda edilen ya da otonom yani belli bir uçuş planı üzerinden otomatik hareket
eden, uçuş için içerisinde bir pilota ihtiyaç duymayan hava aracı tipidir. İHA’lara yerden
kumandalı hava aracı manasına gelen “drone” da denilmektedir [1]. İlk İHA 1916 senesinde
Archibald Low tarafından geliştirilmiştir. İlk kez 1. Dünya Savaşı’nda sınırlı sayıda
üretilen Hewitt-Sperry otomatik uçakları savaş alanlarında kullanılmıştır. Günümüzde
özellikle savunma alanında talebin arttığı bir sistem olmakla birlikte, üzerine olan çalışmalar
gün geçtikçe artmaktadır. Esas olarak keşif amaçlı üretimleri yapılan İHA’lar saldırı amaçlı da
kullanıldıkları için ülkelerin ana araştırma konusu arasına girmiştir. Fakat birçok sivili
vurması da başarısız yanlarının olduğunu, üzerine daha fazla çalışılması gerektiğini
göstermektedir. Bu tarz araçlar başta askeri araştırmalarda keşiflerde olmak üzere uzaktan
algılama, jeofizik araştırmaları, güvenlik, taşıma ve yangın söndürme gibi birçok farklı alanda
kullanılabilmektedir. İnsanlar için daha da önemlisi yetiştirilmesi zor pilotlar için çalışma
alanı tehlikeli olan ortamlarda kullanımları artmaktadır.
İHA'lar avuç içi büyüklüğünden, kanat açıklığı 20 m boyu 10 metrelere ulaşan
ebatlarda farklı amaçlar için kullanılabilecek şekilde olabilmektedirler. Elden atılan
modellerinin yanı sıra elektrik motoru, jet motoru ya da piston motoru kullanan modelleri
mevcuttur. Kullanım alanlarına göre yükselebilecekleri irtifa değerleri de değişmektedir.
Menzillerine ve kullanılan motor tipine göre İHA’lar arasında sınıflandırmalar yapılmıştır [2].
Günümüzde İHA kategorisi içerisinde dikey iniş-kalkış yapabilmesinden, basit
yapısından ve havada asılı kalmasından dolayı multikopter sistemleri rağbet görmektedir.
Multikopter sistemleri çok motorlu insansız hava araçları olarak tanımlanır. 3-4-6-8 motorlu
üretilen multikopterler stabil uçuşlar ve özellikleri sayesinde izleme, arama kurtarma ve
savunma alanında İHA’lar arasında ilk sıralar da yerini almaya başlamıştır. Özellikle
qoadrotor (quadrokopter) üzerine yapılan çalışmalar bu sistemler içerisinde fazlalık
göstermektedir.
Kontrol yapısının karmaşık olması gelişimlerini yavaşlatsa da son birkaç sene
içerisinde farklı alanlarda kullanımları yaygınlaşan quadrotor sistemleri ülkemizde keşif ve
görüntüleme hizmetleri için kullanılmaya başlanmıştır. Dolayısı ile üzerine olan çalışmalar ve
farklı modellemeler sayesinde savunma amaçlı kullanımları yadsınamaz bir gerçektir.

2
2. MULTİKOPTER SİSTEMLERİ VE UÇMA PRENSİPLERİ
Trikopter, quadrokopter, hexakopter, octokopter gibi isimlerle anılan birden fazla
motora sahip döner kanatlı hava araçlarına multikopter sistemleri denir. Çok rotorlu dikine
iniş kalkış yapabilen, 3 eksende hareket kabiliyetine sahip motorlarına iliştirilmiş pervanelerle
taşıma kuvveti oluşturarak uçma işlemini gerçekleştiren, otonom ya da kumanda ile uçuş
imkânına sahip insansız hava aracı tipleridir. Havada asılı kalma ya da tam adıyla uçma
işlemini döner kanatları vasıtasıyla yapmaktadırlar. Helikopterlerdeki kuyruk rotorunun
engellemiş olduğu, helikopterin kendi ekseni etrafında dönüş hareketi multikopterlerde
motorların farklı yönlerde dönmesi ile bertaraf edilir. Örneğin quadro için motorların ikisinin
aynı, diğer ikisinin zıt yöne dönmesi multikopterlerin kendi ekseni etrafında kontrolsüz
dönmesini engeller. Kısaca helikopterlerde ana rotorun gövdeden destek almasıyla ürettiği
döndürme etkisini engelleyen kuyruk rotoru, multikopterlerde ana rotorların farklı yönlere
dönmesiyle sağlanmaktadır.
Quadrokopter dikey iniş kalkış yapabilen, havada asılı kalabilen, manevra kabiliyeti
yüksek, kontrol sistemi karışık olmasına rağmen yapısal olarak basit 4 rotorlu, motorların
üretmiş olduğu tahrik kuvvetinden yararlanarak pervaneleri vasıtasıyla taşıma kuvveti
oluşturan döner kanatlı insansız hava aracıdır.
Quadrokopter uçma prensibi helikopterlerin uçma prensibine çok benzemektedir.
Helikopterlerde pervanenin yaratacağı itme kuvveti ilk olarak Rankin ve Froyt tarafından
bulunmuştur ve ancak 20. yy’ın başlarında uygulamaya konulabilmiştir. Ek olarak ana rotorun
gövde üzerinde oluşturduğu anti-tork reaksiyonu da büyük bir problem teşkil etmiş fakat
kuyruk rotoruyla ya da bazı dizaynlarda bu görevi görecek hava alıklarıyla bu etki
giderilmiştir. Helikopterlerden örnek alınarak kısmen de olsa quadrokopterlerin yapısı
belirlenmiştir.
Havada tutunmayı sağlayan taşıyıcı yüzeyler döner kanat isminden de anlaşılacağı gibi
pervanelerdir. Havada “V” hızıyla yer değiştiren herhangi bir profil üzerinde yukarıya
yönelmiş FN olarak tabir edilen aerodinamik kuvvet oluşur. Bu kuvvet havadan daha ağır
cisimlerin havada tutunmasına izin verir. Esas olarak burada ana faktör hızdır. Hız profil
üzerinde aerodinamik kuvvet oluşumuna etki eden temel faktördür ve aerodinamik kuvvet
rotorun belli hıza ulaşmasıyla oluşur. Yani quadrokopterlerde havada tutunmayı sağlayan,
taşımayı üreten pervaneler iken pervane dönme hareketini sağlayan, hızı oluşturan
pervanelerin takılmış olduğu motorlardır.
3
2.1. Quadrokopterin Dikey Eksende Hareketi
Quadronun 4 rotorunun aynı devirde (bozucu etkinin olmadığı varsayılır) dönmesiyle
sağlanan düşey düzlemdeki dikine iniş ya da kalkış harekettir. Rotorların aynı devirde
dönmesiyle tüm pervaneler üzerinde oluşacak aerodinamik taşıma kuvveti ve sürükleme
(drag) aynı olacaktır. Böylece dikine hareket gerçekleşecektir. Eğer bozucu etki varsa (rüzgâr
ya da sol dengesiz yük gibi) kontrol kartı, kumanda sisteminden motorlara verilen itki (thrust)
değerine göre quadroyu dengelemeye çalışacaktır. Sadece itki sinyalinin gönderilmesi
quadronun dikey eksende hareket ettirilmek istendiğini gösterir. Bu durumda kontrol kartı
bozucu etkiyi bertaraf etmek için ilgili motorların daha fazla devirde dönmesini diğer
motorların daha az devirde dönmesini sağlayarak dikine hareketi gerçekleştirecektir. Böylece
kontrol kartının müdahalesiyle quadro yere paralel olarak bozucu etkilere rağmen dikey
eksende hareketini gerçekleştirecektir.
2.2. Quadrokopterin Boylamsal Eksende Hareketi
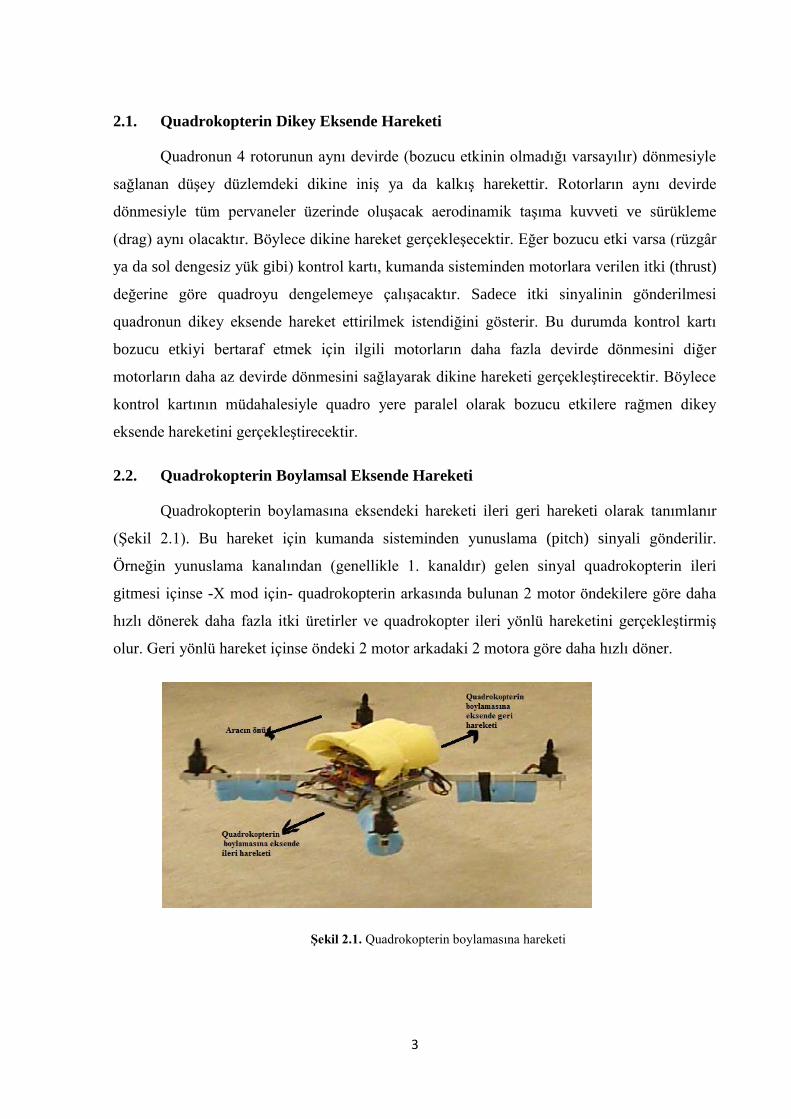
Quadrokopterin boylamasına eksendeki hareketi ileri geri hareketi olarak tanımlanır
(Şekil 2.1). Bu hareket için kumanda sisteminden yunuslama (pitch) sinyali gönderilir.
Örneğin yunuslama kanalından (genellikle 1. kanaldır) gelen sinyal quadrokopterin ileri
gitmesi içinse -X mod için- quadrokopterin arkasında bulunan 2 motor öndekilere göre daha
hızlı dönerek daha fazla itki üretirler ve quadrokopter ileri yönlü hareketini gerçekleştirmiş
olur. Geri yönlü hareket içinse öndeki 2 motor arkadaki 2 motora göre daha hızlı döner.
Şekil 2.1. Quadrokopterin boylamasına hareketi

4
2.3. Quadrokopterin Yanal Eksende Hareketi
Quadrokopterin yatay eksendeki hareketi, sağa ve sola hareket ve kendi ekseni
etrafındaki dönüşü olarak tanımlanabilir. Yani uçaklarda yaw olarak adlandırılan rudder
(dikey stabilize=kuyruk dümeni) tarafından kontrol edilen sapma ve roll olarak adlandırılan
aileron tarafından kontrol edilen yalpa hareketlerdir. Fakat bu 2 hareketin kontrolü
quadrokopterde uçakların tersi şeklindedir. Quadrokopter roll kontrolü ile sağa ve sola doğru
ilerleme hareketini gerçekleştirirken, yaw kontrolü ile kendi ekseni etrafındaki hareketi
gerçekleştirir. Yani ekseni etrafında daire çizme eğiliminde bulunur. Quadrokopterin roll ile
sağa ya da sola hareketine sağa yada sola sapma hareketi denmektedir. Örneğin sağa hareket
için kumanda sisteminden stick sağa doğru çekilerek roll sinyali (genelde 2. kanaldır)
gönderildiğinde quadrokoptein -x mod için- sol tarafındaki 2 motor sağ taraftaki 2 motora
göre daha hızlı dönerek daha fazla itki üretir ve sağ sapma gerçekleşir. Tabi bu durum
herhangi bir bozucu etkinin olmadığı şartlar için böyledir. Örneğin, sağ taraftan esen rüzgâr
var ve siz yine sağ tarafa dönmek istiyorsunuz. Bu durumda soldaki motorlar ilk örneğe göre
daha fazla thrust üretmek zorunda kalır ve sağ motorlar ilk duruma göre daha fazla yavaşlar.
Çünkü burada motorların rüzgârın yaratacağı etkiyi de yenmesi gerekir. Bu işlem kontrol
kartının ilgili sensörlerden (IMU) aldığı verileri kullanarak aracı dengeli bir dönüş için
kontrol etmesiyle mümkündür.

5
3. QUADROKOPTER DİZAYNLARI
İnsansız hava araçları üretiminde yapılan modellerin dizaynları kullanım alanlarına
göre farklılık göstermektedir. Dar bir alanda kullanılacaksa motorlar ve pervanelerin zarar
görmemesi ve etrafa zarar vermemesi için korumaya alınır. Bu sayede güvenli bir uçuş
gerçekleştirilir. Şekil 3.1’de pervane ve motorların korumaya alınması için tüm pervaneyi
içeri alacak şekilde quadrokoptere karbon çubuklar eklenmiştir. Şekil 3.2’de ise tamamen
pervane ve motorlar bir çember içerisine alınarak hem motor ve pervanelerin korunması
sağlanmış hem de daha güvenli uçuş şartları oluşturulmuştur.
Şekil 3.1. Pervaneleri koruma yöntemi 1

6
Şekil 3.2. Pervaneleri koruma yöntemi 2 [3]
Kapalı ya da kalabalık alanlarda kullanılacak bir quadrokopterin dizaynında dikkat
edilmesi gereken noktalar şu şekilde tanımlanabilir:
Pervaneler korumaya alınmalıdır. Yukarda gösterilen şekiller buna örnek
gösterilebilir.
Motor tutacakları sağlam bir malzemeden yapılmalıdır. Titreşime ve çekmeye
karşı mukavemeti yüksek olmalıdır.
Pervanenin monte edildiği motor şaftı pervane hub genişliğiyle uyumlu olmalıdır.
Pervane, motor şaftına kontra somun tarzı titreşimde gevşemeye müsaade
etmeyen parçalar takılmalıdır.
Pervane şafta takılırken gevşemeye karşı direnç oluşturan cıvata yapıştırıcıları
(LOCTITE) kullanılmalıdır.
Kullanılacak malzemeye ve sisteme göre kontrol kartı üzerinde plate olarak
adlandırılan malzemelerin monte edileceği alanlar oluşturulmalıdır.
Oluşturulacak tüm platelerin titreşimden az etkilenmesi için, onların özel yapılar
ile kaplanması gerekir. Bunlara titreşim önleyici (vibration prevent)
denilmektedir (Şekil 3.3).

7
Şekil 3.3. Titreşim önleyici sistemler
İniş takımlarının monte edileceği yerler önceden tespit edilip, sert inişlerde
burulma yapmaması için destekleyici önlemler alınmalıdır. Şekil 3.4’deki iniş
takımı burulma dikkate alınmadan imal edilmiş ve karbon gövdenin şeklini sert
inişlerde değiştirmiştir.
Şekil 3.4. Örnek iniş takımı
Quadrokopterlerde ağırlık merkezinin yeri önemlidir. Bu sebepten dizayn
edilecek gövdede ağırlık merkezi ortada olmalıdır. Bu, yapılan ayarlamaları
kolaylaştırır.
Genellikle quadrokopterlerde lion polimer (lipo) piller kullanılmaktadır. Bu
pillerin kullanımı tehlikelidir ve model üzerinde montajı doğru yerlere
yapılmadığı takdirde herhangi bir kırım sonucu patlayarak yangına sebep olabilir.
Bu sebeple pilin korunması önemlidir. Ek olarak pilin kendi plastik yalıtımı
üzerine ek yalıtım da yapılarak koruma artırılır. Şekil 3.5’de pil bir kafes
içerisine alınarak ve bantla sarılarak koruma sağlanmıştır.

8
Şekil 3.5. Kafes içerisinde ve sarılmış lipo pil
3.1. Quadrokopter tipleri
Quadrokopterler genelde x ve + mod denilen 2 tipte üretilirler. Bu modlar harekete
verilecek tepkilerin kaç motorla yapılacağını gösterir. Örneğin ileri yönlü bir harekete
verilecek tepkide hangi motorlar daha etkindir sorusunun cevabı bu modlarda saklıdır.
3.1.1.X tipi quadrokopter
X mod quadrokopterde aracın önü 2 motorun orta noktasına denk gelmektedir (Şekil
3.5). İstenen hareket için 2 motor tepkisi gözlenmektedir. Bu anlamda aracın önünde 2,
arkasında 2 motor bulunmaktadır. Örneğin ileri yönlü bir hareket için arkadaki 2 motor
öndeki 2 motordan daha fazla itki üretir. Böylece 2 motor ile daha hızlı bir şekilde ileri yönlü
hareket gerçekleştirilir. Sağ sapma için hareketi tanımlarsak sol 2 motor sağ 2 motora göre
daha fazla itki üretir. Aracın sağa doğru kayma denilen hareketi bu şekilde 2 motorun üretmiş
olduğu itki ile daha hızlı gerçekleştirilir. Bu birinci avantajıdır. X modun diğer avantajı ise
istenen hareketler için 2 motorun birlikte çalışarak tek motora fazla yüklenilmemesidir. X
modda motor dönüş yönleri Şekil 3.6’da gösterilmiştir. Bu modda ön ve arka iki motorun
dönüş yönleri birbirlerinin tersidir. Ön sağ ve arka sol saat yönü tersine (counter clockwise) ,
ön sol ve arka sağ saat yönüne (clockwise) dönmektedir.

9
Şekil 3.6. X mod motor dizaynı
3.1.2. + tip quadrokopter
+ mod quadrokopterde aracın önü tek motorun tutturulmuş olduğu eksendedir (Şekil
3.7). Bu modda istenen hareketlere tek motor tepki vermektedir. Bu sebepten x moda göre
daha yavaş ve motorları yoran bir sistemdir. İleri yönlü bir hareket için arka motor ön motora
göre daha faza itki üretir ve hareket gerçekleşir. Sağa kayma hareketinde sol motor sağ
motora göre daha fazla itki üreterek araç sağ yönlü kayma hareketini gerçekleştirir. + mod
için motor dönüş yönleri Şekil 3.7’de gösterilmiştir. Ön ve arka motor saat yönü tersi sağ ve
sol motor saat yönünde dönmektedir.
Şekil 3.7. + Mod motor dizaynı

10
4. QUADROKOPTERDE KULLANILAN MALZEMELER
Quadrokopterlerde temel olarak kullanılan malzemeler şu şekildedir;
Lion polimer piller
Elektronik hız kontrol ünitesi (ESC)
Fırçasız (brushless) motor
Pervane
Kumanda (alıcı-verici)
Kontrol kartı
Sensörler (GPS, IMU, ivme ölçer, gyroskop, barometrik basınç sensörü,
sıcaklık sensörü, rpm sensörü)
Telemetri sistemi (isteğe bağlı)
Kamera sistemi (isteğe bağlı)
4.1. Lion Polymer Pil (LİPO)
Lipo piller doğadaki en hafif metal olan lityum maddesinden üretilirler. Yoğunluğu
(0.535 g/cm3) en düşük katı madde olarak da bilinen lityum elementi bir alkali metaldir. Su
veya su buharı ile karşılaştığında tepkimeye girerek hidrojen açığa çıkarır, ortamda oksijen de
varsa alev alabilir. Ateşe tutulduğunda ise önce kırmızı bir parlama görünür, ardından parlak
beyaz renkte kuvvetli bir alevle yanar [4]. Yani herhangi bir yangın olayında kesinlikle su ile
müdahale edilmemelidir ve kullanımı esnasında oldukça dikkat edilmelidir. Eğer yangın
tehlikesiyle karşı karşıya gelinirse D tipi olarak anılan hafif metal yangın söndürücüleri
kullanılmalıdır. Genellikle kuru kimyevi tozlar bu kategoriye girmektedir.
Lipo bataryalar küçük hacimlerde daha fazla enerji depolama kapasitesine sahip
olduklarından elektrikli hava araçlarında en fazla kullanılan pil çeşididir. Kg başına 720,000
Joule enerji depolama kapasitesiyle, piyasada en fazla kullanılan nikel metal hydride pillerden
yaklaşık 430,000 Joule daha fazla enerji depolama kapasitesine sahiptir.
Lipo bataryalar kullanılmadıkları süre zarfında az miktarda deşarj olurlar. Hemen
hemen günde şarjının %0,01 ini deşarj ederek piller arasında en iyi orana sahip olurlar.
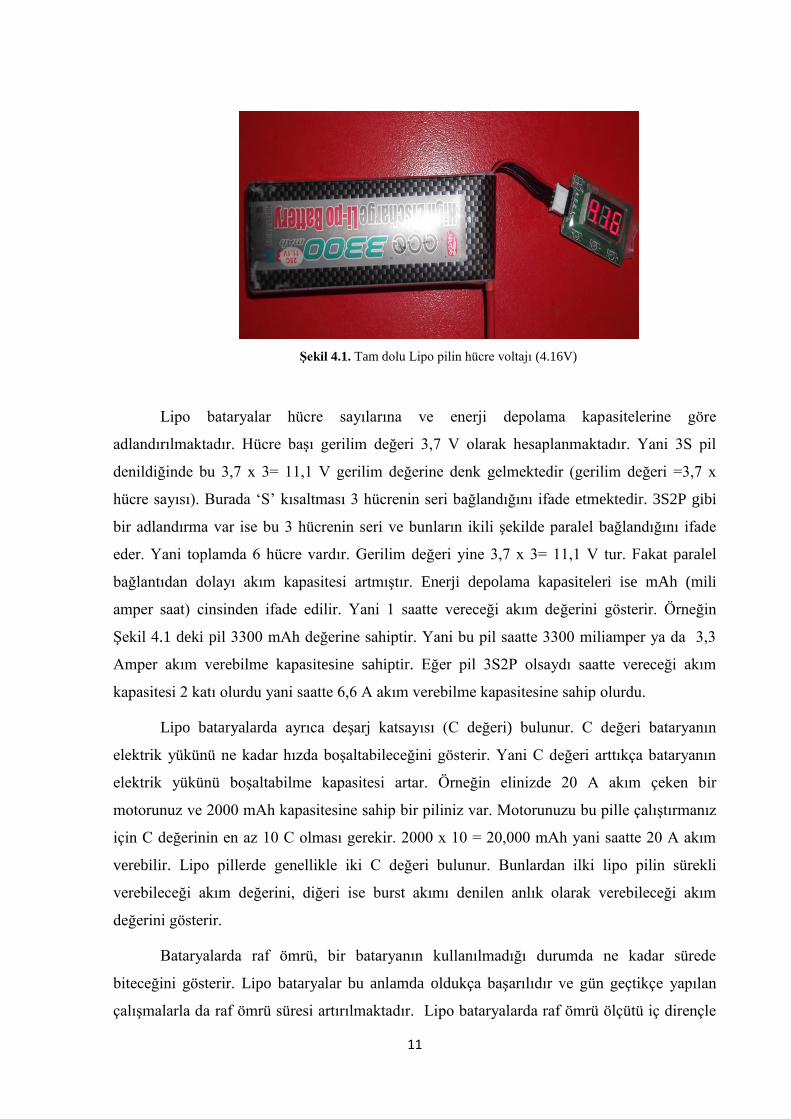
Lipo pillerin hücre başına düşen gerilim değeri de diğer pillere göre fazladır. Lipo
pillerde hücre başına optimum 3.7 V gerilim değeri düşse de tamamen şarj edilmiş bir lipo da
hücre başı gerilim 4.2 V değerine çıkmaktadır (Şekil 4.1).
11
Şekil 4.1. Tam dolu Lipo pilin hücre voltajı (4.16V)
Lipo bataryalar hücre sayılarına ve enerji depolama kapasitelerine göre
adlandırılmaktadır. Hücre başı gerilim değeri 3,7 V olarak hesaplanmaktadır. Yani 3S pil
denildiğinde bu 3,7 x 3= 11,1 V gerilim değerine denk gelmektedir (gerilim değeri =3,7 x
hücre sayısı). Burada ‘S’ kısaltması 3 hücrenin seri bağlandığını ifade etmektedir. 3S2P gibi
bir adlandırma var ise bu 3 hücrenin seri ve bunların ikili şekilde paralel bağlandığını ifade
eder. Yani toplamda 6 hücre vardır. Gerilim değeri yine 3,7 x 3= 11,1 V tur. Fakat paralel
bağlantıdan dolayı akım kapasitesi artmıştır. Enerji depolama kapasiteleri ise mAh (mili
amper saat) cinsinden ifade edilir. Yani 1 saatte vereceği akım değerini gösterir. Örneğin
Şekil 4.1 deki pil 3300 mAh değerine sahiptir. Yani bu pil saatte 3300 miliamper ya da 3,3
Amper akım verebilme kapasitesine sahiptir. Eğer pil 3S2P olsaydı saatte vereceği akım
kapasitesi 2 katı olurdu yani saatte 6,6 A akım verebilme kapasitesine sahip olurdu.
Lipo bataryalarda ayrıca deşarj katsayısı (C değeri) bulunur. C değeri bataryanın
elektrik yükünü ne kadar hızda boşaltabileceğini gösterir. Yani C değeri arttıkça bataryanın
elektrik yükünü boşaltabilme kapasitesi artar. Örneğin elinizde 20 A akım çeken bir
motorunuz ve 2000 mAh kapasitesine sahip bir piliniz var. Motorunuzu bu pille çalıştırmanız
için C değerinin en az 10 C olması gerekir. 2000 x 10 = 20,000 mAh yani saatte 20 A akım
verebilir. Lipo pillerde genellikle iki C değeri bulunur. Bunlardan ilki lipo pilin sürekli
verebileceği akım değerini, diğeri ise burst akımı denilen anlık olarak verebileceği akım
değerini gösterir.
Bataryalarda raf ömrü, bir bataryanın kullanılmadığı durumda ne kadar sürede
biteceğini gösterir. Lipo bataryalar bu anlamda oldukça başarılıdır ve gün geçtikçe yapılan
çalışmalarla da raf ömrü süresi artırılmaktadır. Lipo bataryalarda raf ömrü ölçütü iç dirençle

12
alakalıdır. Bataryanın iç direnci ne kadar düşükse raf ömrü o kadar fazladır. İç dirence
kullanıcıların etkisi de olmaktadır. Yani bataryanın uygun sıcaklıkların üzerinde saklanması iç
direncin artmasına, böylece raf ömrünün kısalmasına ya da kullanılacak kapasitenin
azalmasına sebep olur. Ek olarak bataryalar uzun süre kullanılmazsa %40- 50 şarj seviyesinde
bırakılıp daha düşük iç dirence maruz kalması sağlanır. Yani kullanıcıların raf ömrü
konusunda dikkat etmesi gereken noktalar, bataryaları %40-50 şarj seviyesin de bırakmak ve
oda sıcaklığında saklamaktır.
Bir pili tüm özellikleriyle inceleyelim. Pilimiz 4S2P 5000 mAh 30C-50C olsun;
Gerilim değeri: 3,7V x 4= 14,8 V
Akım değeri : 5000 x 2=10,000 mAh. Yani saatte 10 A akım verebilir.
Sürekli verebileceği akım kapasitesi (deşarj oranı) :10,000 x 30C =300,000 mAh. Yani
saatte sürekli olarak 30 A akım verebilir.
Yanma akımı: 10,000 x 50C=500,000 mAh. Yani anlık olarak 50 A akım verebilir.
Lipo pil kullanımında dikkat edilmesi gereken kurallar:
Lipolar kullanılacak aracın üzerinde korumaya alınmalıdır. Bir kırım sonucu
zedelenmesi su ile teması yangınlara sebep olabilir.
Motorların çekeceği akım değerine göre uygun kapasiteli piller seçilmelidir. Aksi
takdirde pil şişer ve kullanılamaz hale gelir. Yangın tehlikesi olabilir.
Uzun süre kullanılmaması durumun da oda sıcaklığında ve %40-50 şarjlı olarak
saklanmalıdır.
Şarj esnasında hücrelerin eşit miktarda dolması için balanslı şarj aletleri
kullanılmalıdır ve hücrelerden çıkan kontrol kabloları şarj aletine takılmalıdır
(Şekil 4.2).
Şekil 4.2. Lipo şarj işlemi

13
Uygun akım değerinde şarj edilmelidir. Yani şarj esnasında kaç amper akım
uygulanacağı oldukça önemlidir. Örneğin 3S 3300 mAh lık bir pil 1C değerine
göre şarj edilmelidir yani 11,1 V ile 3,3 A lik akım basılarak şarj etme işlemi
yapılmalıdır (Şekil 4.2). Bu akımı karşılayacak şarj aleti de buna uygun
olmalıdır. Yani şarj aletinin gücü en az teoriye göre 3.3x11,1= 36,63 Watt
olmalıdır. Fakat şarj etme işleminde her zaman pilin o anki gerilim değerinden
daha fazla gerilim verilmesi gerekir. Buna göre pilin tam şarjda gerilim değeri
3x4,2 =12,6 V olacağından gerekli güç 12,6 x 3,3= 51,58 watt olmalıdır. Fakat
şarj aletinin verimi de hesaba katılarak bu pilin şarj edilebilmesi için şarj aletinin
gücünün 60 watt civarında olması pratikte uygundur.
Lipo piller ilk 5 kullanım için %50 den fazla boşaltılmadan şarj edilmelidir. İlk
kullanımlara rodaj evresi de denilmektedir. Dolu bir pilin hücre voltajı 4,2 V’tur,
pil bittiğinde ise hücre voltajı 3,7 V olur. Buna göre deşarj kapasitesi 4,2 - 3,7
=0,5 V tur. Rodaj evresinde 0,5 V un yarısı 0,25 V kullanılmalıdır yani hücre
gerilimi 4,2 – 0,25 = 3,95 V civarına düştüğünde pil tekrar şarj edilmelidir.
İlk 5 kullanım için piller 1C değerinin %80 altında şarj edilmelidir. Yani 3300
mAh lık pil 3.3 A değerinin %80 i değerde 2,64 A ile şarj edilmelidir.
Pillerin kırmızı (+ uç) ve siyah uçları (- uç) kesinlikle kısa devre edilmemelidir.
Eğer hücre başı voltaj 3.5 V’un altına düşmüşse ve kullanılamayacak hale
gelmişse yani şarj aleti uyarı veriyorsa (genellikle Battery check, Low voltage
uyarısı) tasnif edilmeyen bir yöntem de olsa pilleri nikel metal hiydride şarj aleti
ile 5 dk civarında şarj edip tekrar lipo şarj aletine bağlanmalıdır. Şarj boyunca
pilin yanından ayrılmamalıdır. Yangın tehlikesi olabilir.
Lipo şarjı esnasında pilin yanında bulunmak gerekir. Herhangi bir aksilik
durumun da yangın tehlikesi diğer pillere oranla daha fazladır.
4.2. Elektronik Hız Kontrol Ünitesi (ESC)
Fırçalı ve fırçasız motorların hızını ayarlayan, hız kontrol ünitesidir. Diğer bir ifade ile
pilden aldıkları elektrik enerjisini, alıcının gaz kanalından aldığı sinyal ile sürerek motorlara
ileten ve motor devrini kontrol eden hız kontrolcüleridir.
14
Elektrikli DC motorlarda (fırçalı motorlar) motor hız kontrolü, voltaj kontrolü ile
gerçekleşir. Voltajın artırılıp azaltılmasına göre motor hızı değişir. Bu işlem fazlasıyla zor ve
ısı açığa çıkaran verimsiz bir yöntemdir.
Multikopter sistemlerinde kullanılan fırçasız motorlar bilinen 3 fazlı motorlardır. Bu
motorlarda kullanılan ESC’ler daha kompleks olup, pilden aldığı DC gerilimi 3 fazlı AC
(Alternatif akım) gerilime çevirerek ve kumandadan gönderilen sinyale göre devri
değiştirerek motoru sürerler. Fırçasız motorlarda kullanılan bu ESC’ler motor devrini PWM
(pulse width modulation) yöntemiyle değiştirirler. Bu yöntem sayesinde fırçalı motorlar da
kullanılan voltaj- hız ilişkisi ile devir değiştiren ESC’lerin meydana getirdiği ısı problemi ve
verimlilik sorunu kısmen ortadan kalkar. PWM metodu darbe genişlik modülasyonu olarak
bilinir. Kumandadan alınan dijital sinyalin pulse genişliği değiştirilerek, motora giden gerilim
değeri dolaylı yönden frekans kontrolü ile yapılır. Pulse genişliğini değiştirme işlemi ESC nin
çıkış akımını sürekli açıp kapatmasıyla gerçekleşir. Yani motora giden voltaj çıkış akımının
ne kadar süre gönderilip ne kadar süre kesildiğiyle alakalıdır. Örneğin, 1 saniyelik zaman
süresince 10 V pile bağlı bir ESC-motor bağlantısında kumanda gaz kolu %60 da iken, ESC
akımı, saniyenin 6/10 unda açacak 4/10 unda kapatacaktır. Böylece motora sürekli 10 V
gitmeyecek ve 1 saniyede giden voltajın ortalamasına göre motorun devri değişecektir. ESC
lerde 1 saniyedeki akım değişiminin yüksek olması istenir. Yani ESC’lerin üzerlerinde yazan
KHz değerleri ne kadar yüksekse yenileme frekansı denilen saniyedeki akım açma kapama
sayısı da o kadar fazla olur. Bu sebepten tercih edilecek ESC’nin yenileme frekansı yüksek
olmalıdır.
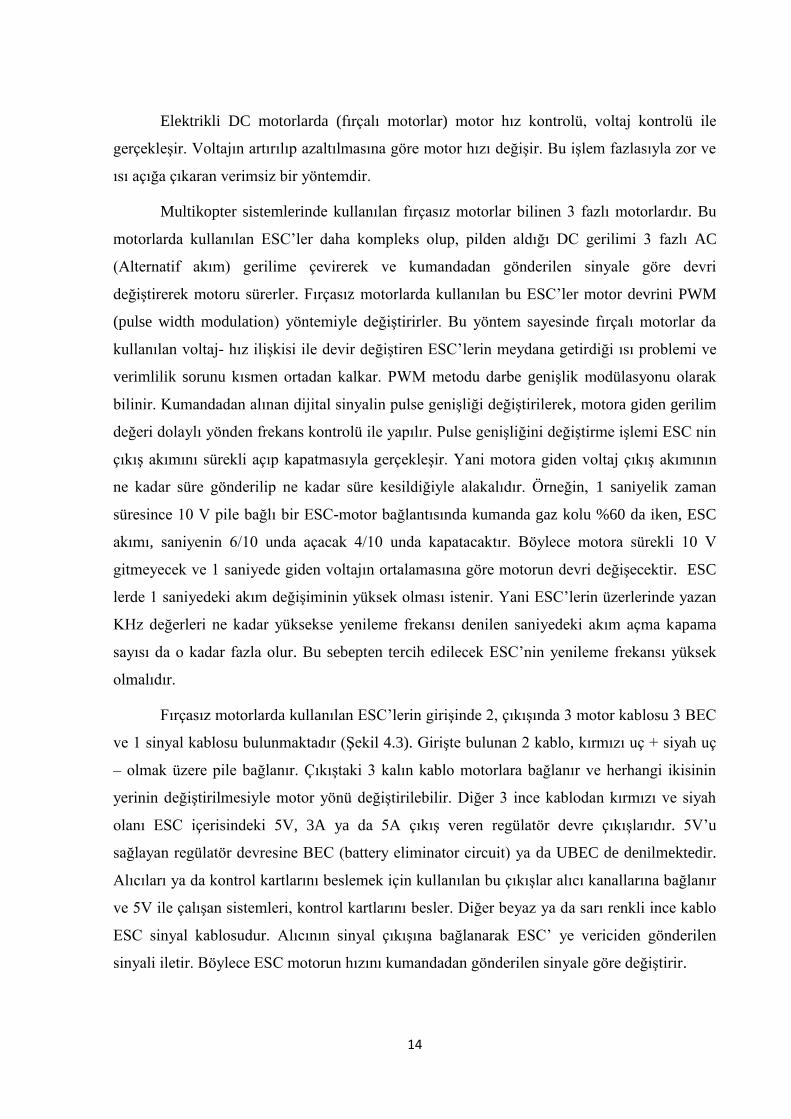
Fırçasız motorlarda kullanılan ESC’lerin girişinde 2, çıkışında 3 motor kablosu 3 BEC
ve 1 sinyal kablosu bulunmaktadır (Şekil 4.3). Girişte bulunan 2 kablo, kırmızı uç + siyah uç
– olmak üzere pile bağlanır. Çıkıştaki 3 kalın kablo motorlara bağlanır ve herhangi ikisinin
yerinin değiştirilmesiyle motor yönü değiştirilebilir. Diğer 3 ince kablodan kırmızı ve siyah
olanı ESC içerisindeki 5V, 3A ya da 5A çıkış veren regülatör devre çıkışlarıdır. 5V’u
sağlayan regülatör devresine BEC (battery eliminator circuit) ya da UBEC de denilmektedir.
Alıcıları ya da kontrol kartlarını beslemek için kullanılan bu çıkışlar alıcı kanallarına bağlanır
ve 5V ile çalışan sistemleri, kontrol kartlarını besler. Diğer beyaz ya da sarı renkli ince kablo
ESC sinyal kablosudur. Alıcının sinyal çıkışına bağlanarak ESC’ ye vericiden gönderilen
sinyali iletir. Böylece ESC motorun hızını kumandadan gönderilen sinyale göre değiştirir.

15
Şekil 4.3. ESC bağlantı diyagramı
ESC voltaj değeri genellikle kullanılabilecek lipo pillerin hücre sayısına göre
üzerlerinde yazar. Bu sebepten kullanılacak ESC ile lipo pil arasında uyum olması gerekir.
ESC akım değeri bir ESC’nin verebileceği maksimum akımı ifade eden değerdir. Bazı
ESC’lerde sürekli ve yanma akımı şeklinde 2 değer verilebilir. Bunlardan sürekli olan yani az
olan değer ESC’nin sürekli olarak motora verebileceği akım değerini yanma akımı ise anlık
olarak verebileceği akım değerini gösterir. Bu yüzden ESC seçiminde kullanılacak motorun
maksimum çekeceği akım değeri dikkate alınmalıdır. Ayrıca ESC akımının motorun çekeceği
maksimum akımdan %10 fazla olması ısınmaları ve ESC’nin yanma riskini de azaltabilir.
ESC’ler barındırdıkları bazı özellikler sayesinde programlanabilirler. Bu konu
uygulama alanında detaylıca anlatılmıştır.
4.3. Fırçasız (Brushless) Motorlar
Elektrik motorları elektriğin manyetik alan özelliğini kullanarak elektrik enerjisini
mekanik enerjiye dönüştüren makinelerdir [5]. Fırçasız motorlar adından da anlaşılacağı gibi
fırça olmadan elektronik aksamlar içeren motorlardır. Bunların, fırçalı motorlardan farkı akım
çeviricilerin fırça değil elektronik olmasıdır. Daha sessiz çalışmaları, fırçaların meydana
getirdiği sürüklemenin ve ısıdan kaynaklanan kayıpların, fırçaların meydana getirdiği
kıvılcımların olmaması, kolay soğutulabilmeleri fırçalı motorlara göre üstünlükleridir.
Fırçasız motorlar diğer DC motorlar gibi direk bataryaya bağlanarak çalıştırılamazlar.
Böyle bir yanlışlığın yapılması motorun yanmasına neden olur. Bu sebepten fırçasız
motorların çalıştırılabilmesi için ESC’lere ihtiyaç duyulur.
16
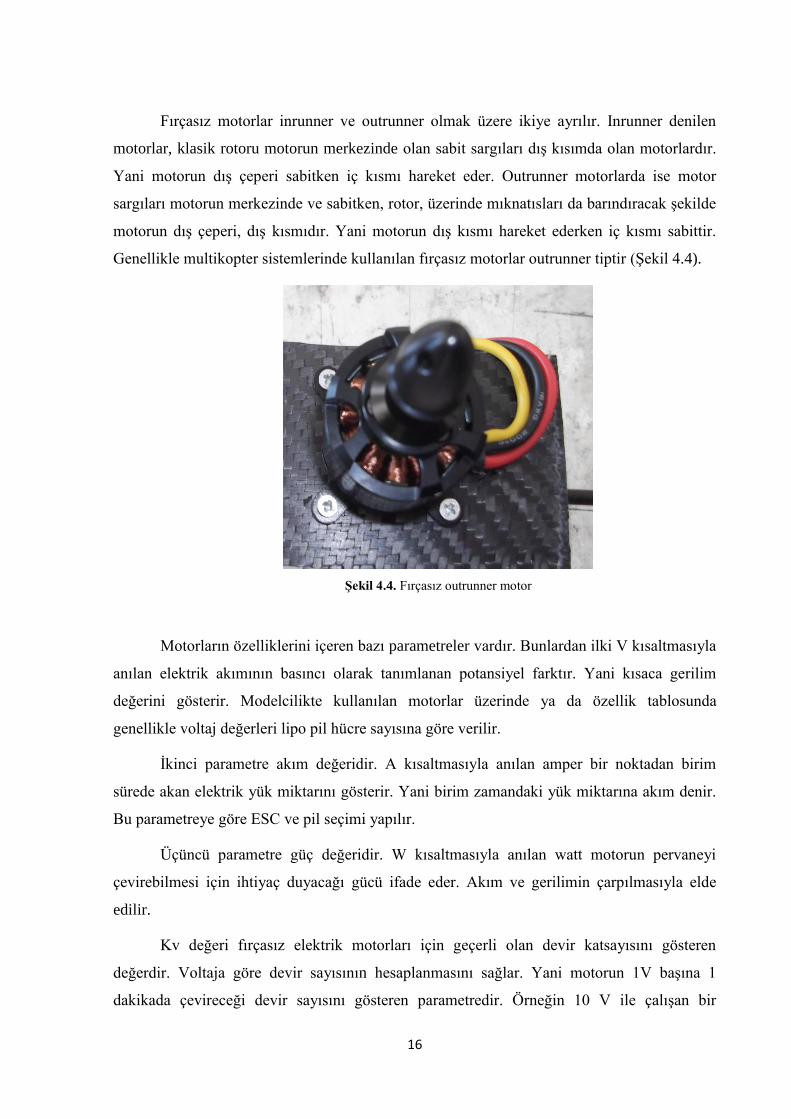
Fırçasız motorlar inrunner ve outrunner olmak üzere ikiye ayrılır. Inrunner denilen
motorlar, klasik rotoru motorun merkezinde olan sabit sargıları dış kısımda olan motorlardır.
Yani motorun dış çeperi sabitken iç kısmı hareket eder. Outrunner motorlarda ise motor
sargıları motorun merkezinde ve sabitken, rotor, üzerinde mıknatısları da barındıracak şekilde
motorun dış çeperi, dış kısmıdır. Yani motorun dış kısmı hareket ederken iç kısmı sabittir.
Genellikle multikopter sistemlerinde kullanılan fırçasız motorlar outrunner tiptir (Şekil 4.4).
Şekil 4.4. Fırçasız outrunner motor
Motorların özelliklerini içeren bazı parametreler vardır. Bunlardan ilki V kısaltmasıyla
anılan elektrik akımının basıncı olarak tanımlanan potansiyel farktır. Yani kısaca gerilim
değerini gösterir. Modelcilikte kullanılan motorlar üzerinde ya da özellik tablosunda
genellikle voltaj değerleri lipo pil hücre sayısına göre verilir.
İkinci parametre akım değeridir. A kısaltmasıyla anılan amper bir noktadan birim
sürede akan elektrik yük miktarını gösterir. Yani birim zamandaki yük miktarına akım denir.
Bu parametreye göre ESC ve pil seçimi yapılır.
Üçüncü parametre güç değeridir. W kısaltmasıyla anılan watt motorun pervaneyi
çevirebilmesi için ihtiyaç duyacağı gücü ifade eder. Akım ve gerilimin çarpılmasıyla elde
edilir.
Kv değeri fırçasız elektrik motorları için geçerli olan devir katsayısını gösteren
değerdir. Voltaja göre devir sayısının hesaplanmasını sağlar. Yani motorun 1V başına 1
dakikada çevireceği devir sayısını gösteren parametredir. Örneğin 10 V ile çalışan bir
17
motorun Kv değeri 700 ise bu motorun dakikadaki devir sayısı= 10x700=7000 devir/dakika’
dır. Genellikle dev/dakika yerine rpm (revolution per minute) kullanılır.
Diğer bir parametre Kt değeri diye tabir edilen tork katsayısıdır. Bu değer bir motorun
amper başına vereceği tork değerini ounce-inch cinsinden ifade eder. Örneğin 0,60 oz-inc/A
Kt değerine sahip bir motor 10 A de 6 oz-inc tork verir.
Kv değeri ile Kt değeri arasında ters orantı vardır. Yani Kv değeri yüksek olan bir
motorun amper başına vereceği tork değeri düşük olur. Bu sebepten yüksek Kv değerli
motorlarda tork değerinin artırılması için küçük pervaneler ya da ek dişli sistemleri
kullanılmalıdır.
Fırçasız motorların etiketlerinde ya da özellikler tablosunda optimum verim için
kullanılması gereken pervane ölçütleri de belirtilir. Kullanılacak pervanelerin bu özellikler
dahilinde olması verimi artırmaktadır.
4.4. Pervane
Hızın etkisiyle taşıma kuvvetini üreten taşıyıcı yüzeylere başka bir deyişle döner
kanatlara pervane denir. Quadrokopterlerde 2 tip pervane kullanılır [6].
1. Saat yönü dönen (clockwise)
2. Saat yönü tersi dönen (counter clockwise)
2 farklı dönüş yönüne sahip pervane kullanılmasının sebebi yukarıda anlatıldığı gibi
quadrokopterin gövde üzerinde oluşturmuş olduğu anti tork etkisini yok etmektir. Fakat
piyasada genelde imalat açısından kolay olması sebebi ile tek tip pervane üretilmesi, istenen
pervane ölçülerinin bulunmasını güçleştirmektedir. Bu sebepten farklı çözüm yolları olsa da
en sağlıklısı uygun pervanelerin kullanılmasıdır.
Pervane seçiminde, kullanılan motorun özellikleri ana parametredir. Özellikle Kv
değerine göre pervane seçimi yapılması ve motor özellik çizelgesindeki pervanelerin
kullanılması verimlilik açısından önemlidir. Kv değeri küçük olan yani devir sayısı az olan
motorlarda gerekli taşımayı oluşturması açısından Kv değeri büyük olan motorlara göre daha
büyük pervane kullanılır. Çizelge 4.1’de E-MAX BL 2826 tipinde bir motor ile kullanılması
gereken pervaneler ve akım-voltaj durumlarına göre ürettiği itki değerleri bulunmaktadır.

18
Çizelge 4.1 BL2826 tip motorun çeşitli pervanelere ve akım-voltaj ilişkisine göre ürettiği itki değerleri
Pervaneler, boy ve burulma açılarına göre isimlendirilirler. Yani üzerlerinde iki ayrı
numara vardır. Örneğin 12x6 pervane demek 12 inch boyunda ya da çapında 6 inch burulma
açısına sahip bir pervane demektir. Burulma açısı, pervanenin 360 derecelik dönüşünde
ilerlediği mesafe değeridir. Bu değerler bazen mm cinsinden de verilmektedir. Fakat
belirtilmediği durumlarda inch olarak kullanılır.
Pervanelerde burulma açısına göre bazı özellikler elde edilir. Örneğin burulma açısı
yüksek pervaneler yavaş süratlenip hızlı uçuş sağlarlar. Bunun yanında motor durduğunda
pervane hızı geç yavaşlar. Burulma açısı küçük pervaneler ise çabuk hızlanırlar, yavaş uçuş
sağlarlar, basit motor devir kontrolü sunarlar.
Modellerde kullanılan yapım malzemelerine göre pervane tipleri;
Naylon pervaneler
Plastik pervaneler
Karbon pervaneler
Karbon-fiber pervaneler
Ahşap pervaneler
Fiberglass pervaneler
Metal pervaneler
şeklindedir.

19
Naylon ya da plastik pervaneler esnek olmaları sebebi ile kalitesizdirler. Fakat ucuz
olmalarından dolayı özellikle ilk denemelerde pervane kırımı fazla olabileceğinden
kullanılmaktadırlar. Bu pervanelerin kullanılması durumunda kenarlarında kalan keskin
çapaklar zımpara ile temizlenmelidir. Karbon, ağaç ya da fiberglass pervanelerin
performansları iyidir.
Ahşap pervaneler diğerlerine göre hafif ve az esnek olduklarından motor üzerine az
yük bindirirler. Böylece diğer pervanelere göre daha yüksek devir sayılarına ulaşabilirler.
Esnek olmaları sessiz çalışmalarına da bir etkendir. Fakat yeni başlayanlar için uygun
değildirler. Çünkü çok çabuk kırılırlar.
Karbon-fiber pervaneler hafif, esnek olmayan verimli pervanelerdir. Tek dezavantajı
fiyatlarının yüksek olmasıdır.
Fiberglass pervaneler karbon ve ahşap pervanelere göre ucuz plastik pervanelerden
verimli, ağır ve esnek pervanelerdir. Kullanılması halinde keskin yüzeyleri zımparalanmalıdır.
Şekil 4.5. Malzeme cinsine göre pervane tipleri
Pervane balansı oldukça önemli bir konudur. Balans edilmemiş bir pervane aşırı
derecede titreşime, gürültüye ve dengesiz taşımaya sebep olur. Bu sebepten yeni alınmış dahi
olsa pervaneler kullanılmadan önce balans testi yapılmalıdır. Bunun için bazı test düzenekleri
bulunmaktadır. Düzeneğin olmaması durumunda aşağıdaki işlemler yapılmalıdır:
Pervane orta noktasından hub çapına uygun uzun bir çubuk pervaneye geçirilir.
Düz bir zemin üzerinde çubuğun 2 tarafı sabitlenir.
Pervane çubuk üzerinde döndürülür.

20
Eğer yere paralel şekilde dengede kalıyorsa pervane balanslıdır denilir.
Eğer sürekli bir tarafa yatma eğilimi gösterirse o taraf pervanenin ağır olan
kısmıdır.
Ağır olan kısmın diğer tarafına karşı bir ağırlık olacak şekilde ince bant
yapıştırılır. Pek tavsiye edilmemesine rağmen ağır olan taraf zımparalanarak
denge noktası da yakalanabilir.
Böylece pervane balansı ayarlanır.
Balansı bozuk pervanelerin meydana getirdiği zararlar şu şekildedir:
Çok fazla titreşim meydana gelir.
Titreşimden dolayı motor yatakları ve motor şaftı zarar görür.
Motor şaftında aşınma gerçekleşir.
Motor gücü önemli oranda azalır.
Araç üzerindeki sensörler titreşimden dolayı doğru ölçüm yapamazlar.
Titreşimden dolayı araç yapısının mukavemeti azalır. Yapısal bozukluklar
meydana gelir.
Vida ya da bağlantı elemanlarını gevşemesine sebep olur. Böylece kırım tehlikesi
artar.
4.5. Alıcı Verici (Kumanda Sistemi)
Multikopter ya da uçak modelciliğin de genellikle 2.4 GHz frekans bandında en az 6
kanallı kumanda kullanılır. Bu kumandaların kendilerine göre haberleşme protokolleri
bulunmaktadır. Burada incelenen Hitec Aurora 9 AFHSS protokolünde haberleşen 9 kanallı
kullanıcı dostu bir kumandadır.
Hitec Aurora 9, 9 kanallı pwm çıkış veren bir alıcıya sahiptir. Alıcı beslemeleri
normalde diğer çoğu model için 5V iken bu modelde farklıdır. Alıcı üzerinde SPC
(Suplementary Power Connection) portu bulunur. Bu port bu alıcının 35 V ile beslenmesini
sağlayan porttur. Alıcıya direk takılan yüksek voltaj ile çalışan servoları beslemek için bu
porttan alıcıya 35 V’a kadar gerilim uygulanabilir. Yalnız standart servo kullanılacaksa bu
gerilim değeri servoyu yakacaktır. O yüzden bu port sadece yüksek gerilimle çalışan
sistemlerde kullanılmalıdır.
21
4.5.1. Hitec Aurora 9 verici üzerindeki tuşlar
CT, LT, RT Switchleri: Aurora kumandasının özelliklerinin birçok ince ayarı için
kullanılan ayar kontrol anahtarlarıdır. Kamera gimbalları için ya da PID tuningler için
kullanılabilirler.
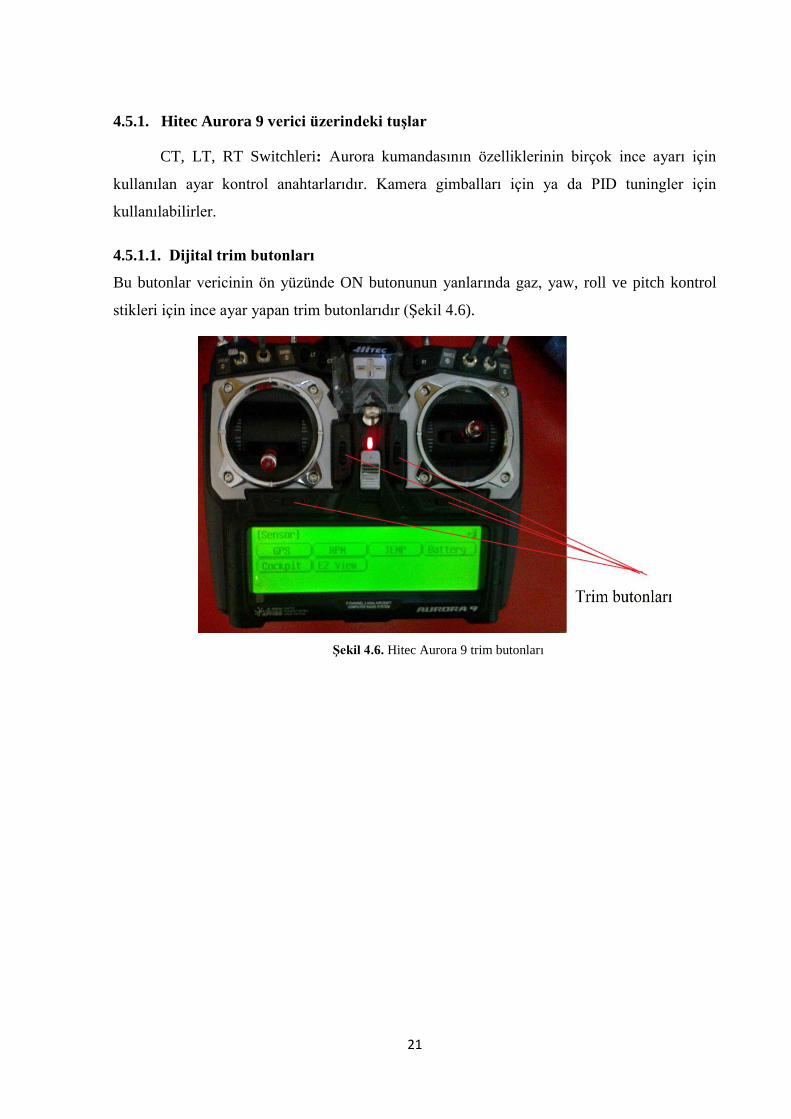
4.5.1.1. Dijital trim butonları
Bu butonlar vericinin ön yüzünde ON butonunun yanlarında gaz, yaw, roll ve pitch kontrol
stikleri için ince ayar yapan trim butonlarıdır (Şekil 4.6).
Şekil 4.6. Hitec Aurora 9 trim butonları

22
4.5.1.2. Dokunmatik ekran göstergeleri
Hitec Aurora 9 kumandası kullanım kolaylığı açısından dokunmatik ekran özelliği
sunar. Bu sayede uçuşta çeşitli özelliklere erişmek kolaylaşır.
Şekil 4.7. Hitec Aurora 9 menüsü[7]
1. Model number: 30’a kadar modelin kaydedildiği model kayıt menüsüdür. Tek bir
kumanda ile birden fazla modeli kullanmak için bu menüye her bir model ile ilgili
ayarlar kaydedilir ve tekrar bu ayarlar yapılmadan uçuş gerçekleştirilir.
2. Model name: Birden fazla hava aracı bu kumanda ile kontrol edilecekse modelleri
birbirinden ayırt etmek için belirleyici isimler kullanılır. Bu isimlerin ekrana yansıdığı
bu alan sayesinde istenilen modelin seçimi kolaylaşır.
3. Flight condition : Kullanıcı tarafından atanan uçuş modlarını ekranda görülmesine ve
yanlış bir modda uçma olasılığını azaltan kullanıcı dostu bir özelliktir. Örneğin uçuş
şartlarının atandığı 3 konumlu anahtarın yanlışlıkla hareket ettirilmesiyle farklı bir
modda kırımla sonuçlanabilecek uçuşu önlemek için bu modun yazıldığı kısma
kumanda her açıldığında bakılmalıdır.
4. Aircraft type icon: ACRO, GLİD, HELİ model tipleri arasında modele göre seçim
yapılmasına olanak sağlayan alandır. Multikopter sistemleri için ACRO modu seçilir.
5. Custom folder: Model fonksiyonlarına ulaşılan kısımdır.
6. System menu: Sistem fonksiyonlarına ulaşılan menüdür.
7. Channel number: Verici kanal numaraları gösteren ekrandır.
8. Digital trim position indicator: Roll, pitch, yaw ve gaz stiklerinin konumlarını gösteren
gösterge sistemidir. Yani roll, throttle, pitch ya da yaw stiklerinin ne oranda hareket
ettirildikleri bu göstergeler sayesinde belirlenir.
9. Power bar indicator: Verici pilinin durumunu gösteren bardır. Üzerine tıklanması
durumuna göre % olarak ya da direk voltaj değeri olarak kalan pil gerilimi gösterilir.

23
10. Signal modulation : Seçilen modülasyon sinyal tipini gösterir (PPM, QPCM, AFHSS).
11. Active or inactive transmit icon: Kumanda sinyalinin iletim durumunu gösterir. Eğer
verici iletimde ise ekran açık aydınlık ve “on air” yazısı yazar; iletimde değilse ekran
karanlıktır.
12. Integ-t timer: Toplam uçuş süresini gösterir. Sıfırlanabilme özelliğine sahiptir.
4.5.2. Kumanda bindleme
Kumanda bindleme işlemi kumanda ile alıcıyı birbirine tanıtma işlemidir. Alıcıyı
kumandaya bağlama diye de tabir edilir. Bu işlem hemen hemen tüm kumandalar için aynıdır.
Fakat örnek anlatım için Hitec Aurora 9 kullanılacaktır.
Kumanda bindleme için gerekli işlemler şu şekildedir:
• Kumanda vericisi ve alıcısı kapatılır.
• Vericinin arkasındaki modül üzerinde bulunan küçük yuvarlak butona kalem vs. ile
basılarak verici açılır ve ekranda çıkan “YES” tuşuna dokunmatik tuş yardımı ile
basılır.
• Verici modülünde bulunan buton serbest bırakılır.
• Gaz stiği en alt noktaya alınır. Kısa bir süre beklenip vericiyi kapatmadan bir kenara
bırakılır.
• Alıcı üzerinde, vericideki butona benzer küçük butona kalem vs. ile basılır. Bu işlem
ile aynı esnada alıcıya elektrik verilir.
• Hem alıcı hem verici kapatılıp tekrar açılır. 4 kez ard arda beeb sesi duyulduktan sonra
bindleme işlemi denilen tanıtma işlemi gerçekleşmiş olacaktır.
Bu işlem sonunda kumanda arkasındaki ışıklardan sadece kırmızı olan yanmalıdır.
Aynı şekilde alıcı üzerinde de sadece kırmızı led yanık olmalıdır. Bu normal modda kumanda
sisteminizin çalıştığını gösterir.
Eğer tanıtma işlemi sonunda kırmızı ışığın yanında mavi ışık da yanıyor ise bu normal
moddan farklı bir modda olunduğunu gösterir (SCAN MOD, CHECK MOD). Bu durum,
genellikle kumandanın açılıp YES denildikten sonra, verici modülü üzerindeki butona
basılmasından meydana gelir. Bu sebepten bu butona, YES butonuna basmadan önce
basılması ve YES butonuna bastıktan sonra da 1-2 sn daha basılı tutulması gerekir.
24
Normal mod, verici açıldığında 2 farklı frekansı sabitleyip kullanım esnasında
uygunluğa göre bu 2 frekans arasında geçişler yapan moddur. Binding süresi çok kısa
olduğundan genellikle bu mod kullanılır.
Scan mod ise, 20 farklı kanal kaydeder ve uygun olanlar arasında gezinir. Bu sebepten
binding süresi uzundur ve hava aracının kumandadan kopma riski vardır. Yani herhangi sinyal
kaybında hakimiyet kaybedilebilir. Fakat kalabalık alanlarda bu mod uygundur.
4.6. Kontrol Kartı
Quadrokopter sistemlerinde kullanılan malzemeler arasında en önemli olanı kontrol
kartıdır. Çünkü çok rotorlu araçlarda kontrol işlemi uçaklarda olan sistemlerden daha
karmaşık ve zordur. Yapılacak hava aracının hangi amaçla kullanılacağına göre kontrol
kartını seçmek gerekir. Bu sebepten kullanılan kontrol kartlarının özellikleri iyi analiz
edilmelidir.
Piyasada kullanılan kontrol kartlarından bazıları şu şekildedir:
• Ardupilot
• DJI Wookong Multi Rotor (WKM)
• Paparazzi Pilot
• DJI Naza
• KK Multicopter
• Multi wii
• ZERO TECH
• MegaWAP
• Shrediquette
• Open copter control
• Mikrocopter
4.6.1.Ardupilot kontrol kartı
Ardupilot kontrol kartı arduino tabanlı olup programlamaya açık yani geliştirilebilir ve
birçok ayara sahip uğraşılması gereken kontrol kartıdır. Kitap boyunca Ardupilot Mega 1
kontrol kartı incelenecektir. Ardupilot Mega 1, ardupilot kontrol kartı ve IMU kartından
25
oluşur. IMU APM için gerekli sensörleri içeren ve harici sensör bağlantısı yapılmasına imkân
tanıyan bir karttır.
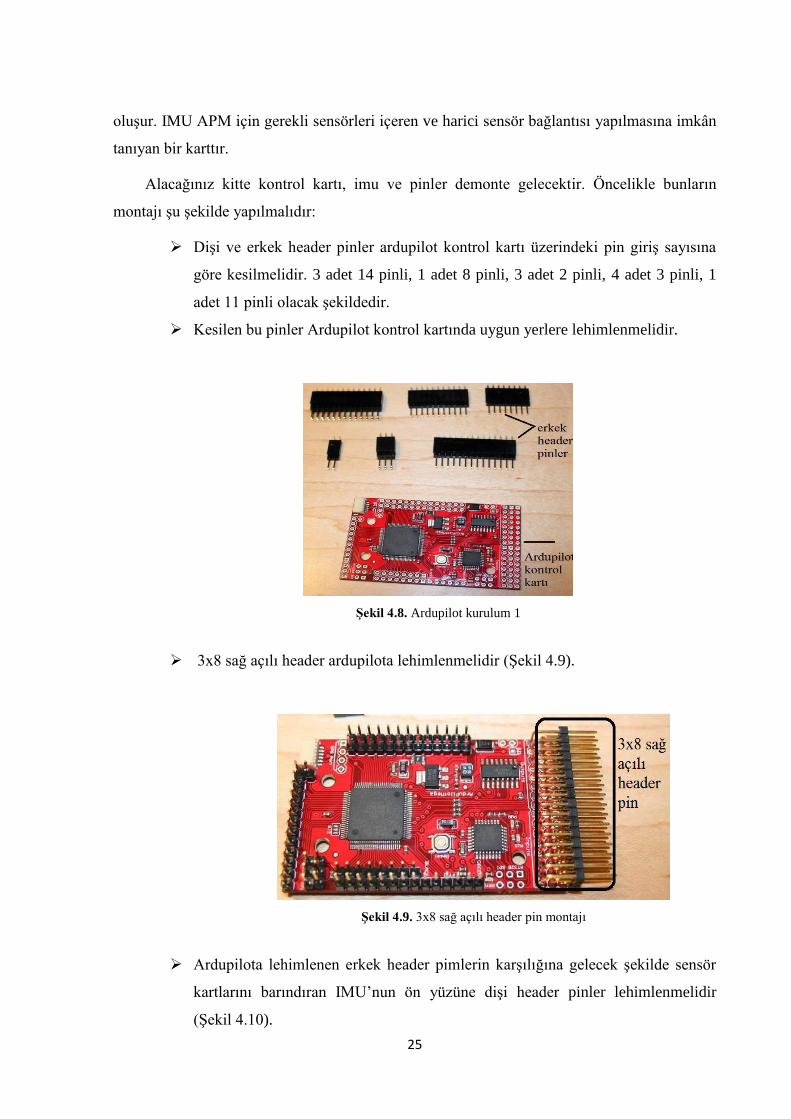
Alacağınız kitte kontrol kartı, imu ve pinler demonte gelecektir. Öncelikle bunların
montajı şu şekilde yapılmalıdır:
Dişi ve erkek header pinler ardupilot kontrol kartı üzerindeki pin giriş sayısına
göre kesilmelidir. 3 adet 14 pinli, 1 adet 8 pinli, 3 adet 2 pinli, 4 adet 3 pinli, 1
adet 11 pinli olacak şekildedir.
Kesilen bu pinler Ardupilot kontrol kartında uygun yerlere lehimlenmelidir.
Şekil 4.8. Ardupilot kurulum 1
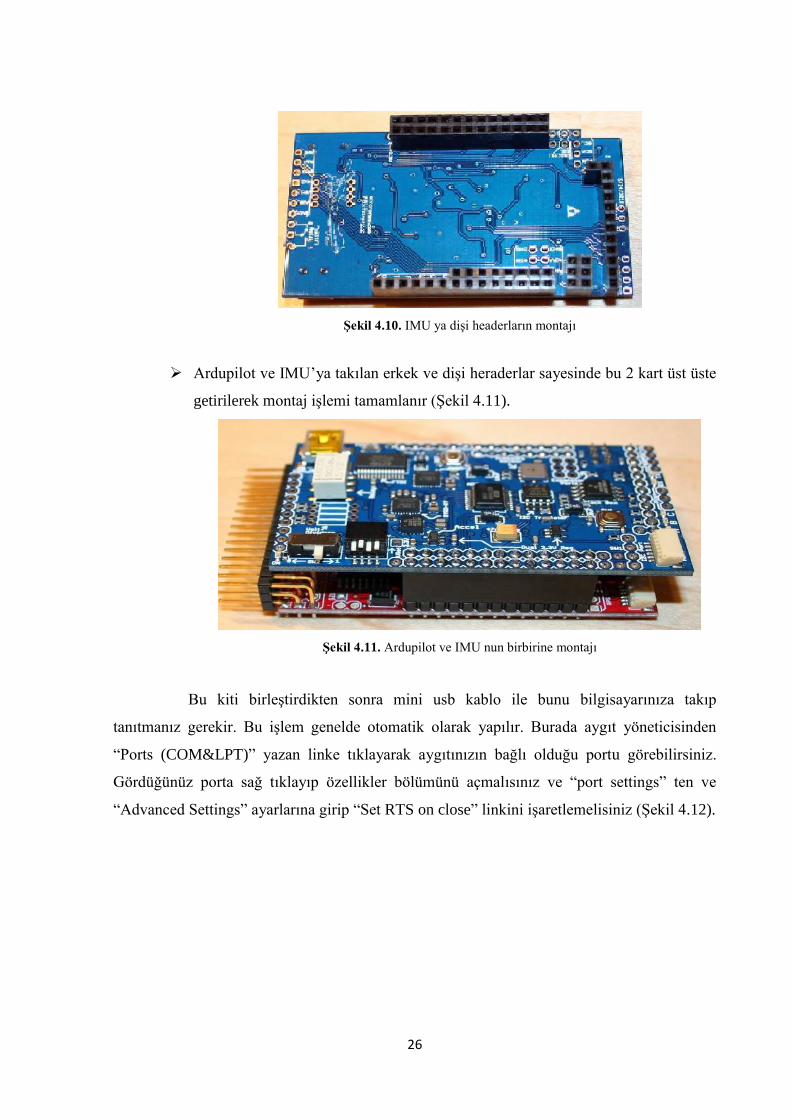
3x8 sağ açılı header ardupilota lehimlenmelidir (Şekil 4.9).
Şekil 4.9. 3x8 sağ açılı header pin montajı
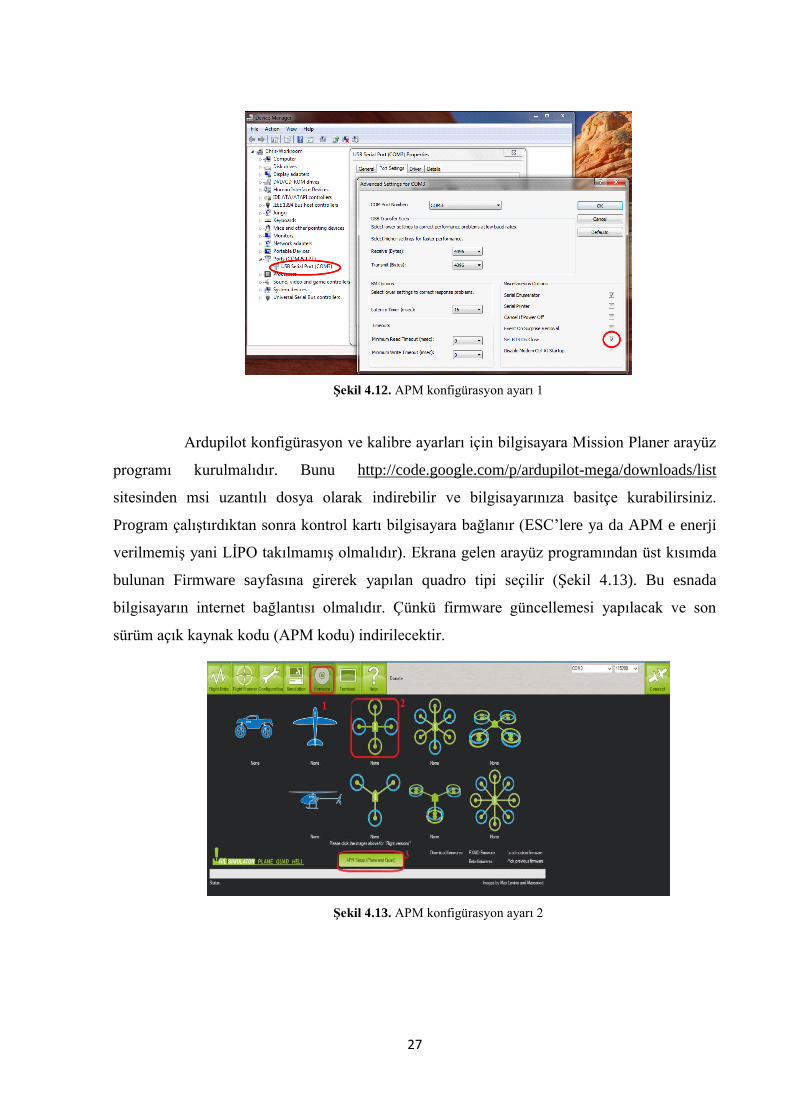
Ardupilota lehimlenen erkek header pimlerin karşılığına gelecek şekilde sensör
kartlarını barındıran IMU’nun ön yüzüne dişi header pinler lehimlenmelidir
(Şekil 4.10).
26
Şekil 4.10. IMU ya dişi headerların montajı
Ardupilot ve IMU’ya takılan erkek ve dişi heraderlar sayesinde bu 2 kart üst üste
getirilerek montaj işlemi tamamlanır (Şekil 4.11).
Şekil 4.11. Ardupilot ve IMU nun birbirine montajı
Bu kiti birleştirdikten sonra mini usb kablo ile bunu bilgisayarınıza takıp
tanıtmanız gerekir. Bu işlem genelde otomatik olarak yapılır. Burada aygıt yöneticisinden
“Ports (COM&LPT)” yazan linke tıklayarak aygıtınızın bağlı olduğu portu görebilirsiniz.
Gördüğünüz porta sağ tıklayıp özellikler bölümünü açmalısınız ve “port settings” ten ve
“Advanced Settings” ayarlarına girip “Set RTS on close” linkini işaretlemelisiniz (Şekil 4.12).
27
Şekil 4.12. APM konfigürasyon ayarı 1
Ardupilot konfigürasyon ve kalibre ayarları için bilgisayara Mission Planer arayüz
programı kurulmalıdır. Bunu http://code.google.com/p/ardupilot-mega/downloads/list
sitesinden msi uzantılı dosya olarak indirebilir ve bilgisayarınıza basitçe kurabilirsiniz.
Program çalıştırdıktan sonra kontrol kartı bilgisayara bağlanır (ESC’lere ya da APM e enerji
verilmemiş yani LİPO takılmamış olmalıdır). Ekrana gelen arayüz programından üst kısımda
bulunan Firmware sayfasına girerek yapılan quadro tipi seçilir (Şekil 4.13). Bu esnada
bilgisayarın internet bağlantısı olmalıdır. Çünkü firmware güncellemesi yapılacak ve son
sürüm açık kaynak kodu (APM kodu) indirilecektir.
Şekil 4.13. APM konfigürasyon ayarı 2

28
Şekil 4.14. Mission planer ekranı
4.6.1.1.APM beslemesi ve bağlantıları
Ardupilot Mega, 2 farklı yol ile beslenebilir. İlk yöntem ESC üzerindeki ubec
devresinden sağlanan 5V ile kontrol kartının +5, -5V olan kısmına konektörle yapılır (Şekil
4.15). Quadroda 4 adet ESC kullanılacağından APM, paralel bağlı 4 adet 5V 3A kaynakla
beslenir. İstenirse bir ESC hariç diğerlerinin kırmızı renkli +5 V çıkış veren kablosu
kesilebilir. Tüm ESC çıkışlarının bağlanması durumunda bir sorun oluşmamaktadır.
Şekil 4.15. APM besleme yöntemi 1
Diğer bir besleme yöntemi ise ESC nin regülatör devresini kullanmayıp harici ubec
devresi kullanmaktır (Şekil 4.16). Bu yöntemde araç üzerine ilave olarak bir adet ubec devresi
koyulur. ESC regülatörlerinin arızalanmasına karşı iyi bir yöntemdir, fakat burada tek bir
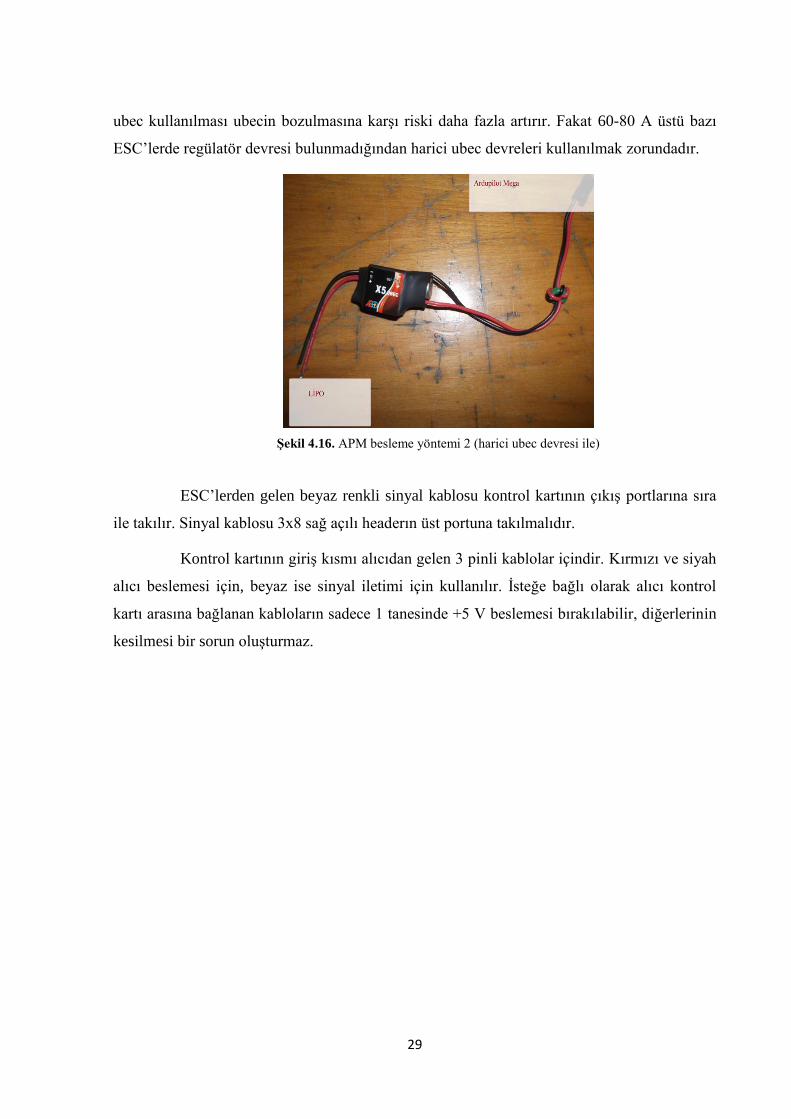
29
ubec kullanılması ubecin bozulmasına karşı riski daha fazla artırır. Fakat 60-80 A üstü bazı
ESC’lerde regülatör devresi bulunmadığından harici ubec devreleri kullanılmak zorundadır.
Şekil 4.16. APM besleme yöntemi 2 (harici ubec devresi ile)
ESC’lerden gelen beyaz renkli sinyal kablosu kontrol kartının çıkış portlarına sıra
ile takılır. Sinyal kablosu 3x8 sağ açılı headerın üst portuna takılmalıdır.
Kontrol kartının giriş kısmı alıcıdan gelen 3 pinli kablolar içindir. Kırmızı ve siyah
alıcı beslemesi için, beyaz ise sinyal iletimi için kullanılır. İsteğe bağlı olarak alıcı kontrol
kartı arasına bağlanan kabloların sadece 1 tanesinde +5 V beslemesi bırakılabilir, diğerlerinin
kesilmesi bir sorun oluşturmaz.

30
Şekil 4.17. X tipi APM konfigürasyonu
4.6.1.2.APM kalibrasyon ayarları
Öncelikle kumanda açılır, ardından APM ve ESC ler beslenir. USB aracılığı ile
APM bilgisayara bağlanır ve hangi porta takıldığı bilgisayar-aygıt yöneticisinden tespit edilir.
Mission planer programı açılır ve sağ üstte bulunan connect linkine tıklanarak bilgisayar ile
bağlantı işlemi gerçekleştirilir. Ekranın üst kısmında bulunan configüration linkine tıklanarak
kalibrasyon ayarlarına başlanır.
4.6.1.3.Kumanda kalibrasyonu
Bu ayarın yapılabilmesi için önce kumanda daha sonra LİPO ile kontrol kartı ve
ESC beslenir. Ekranda pitch, roll, throttle, yaw ve diğer kanallara ait stik seviye göstergeleri
bulunur. Sağ altta bulunan “Calibrate Radio” linkine tıklanıp ayarlara başlanır (Şekil 4.19).
Bu ayarlara başlanmadan önce kumandadan J1, J2, J3, J4 stiklerine uygun kanallar
atanmalıdır. Kanallar genellikle Şekil 4.18 deki gibidir.

31
Şekil 4.18. Kumanda kanallarının stiklere dağılımı
• Kanal 1: Roll sol = düşük PWM – Roll sağ = yüksek PWM
• Kanal 2: Pitch Yukarı= düşük PWM – Pitch Aşağı = yüksek PWM
• Kanal 3: Düşük Throttle = düşük PWM – Yüksek Throttle = yüksek PWM
• Kanal 4: Yaw sol = düşük PWM – Yaw sağ = yüksek PWM
• Kanal 5: 3 konumlu uçuş mod seçim anahtarıdır.
• Kanal 6: İsteğe göre kamera gimbalı için vs. kullanılabilir.
• Kanal 7: İsteğe uygun herhangi bir kontrol işlemi için kullanılabilir.

32
Şekil 4.19. Kumanda kalibrasyon işlemi
“Calibrate Radio” linkine tıklandıktan sonra ekranda çıkan kutucuklarda kırmızı
şeritler belirir. Bu kırmızılar sticklerin hareketiyle koordineli olarak hareket eder ve stick limit
değerlerini kaydeder. Bu aşamada tüm stickler son seviyeye kadar hareket ettirilmeli ve
kaydedilmelidir. Eğer stik göstergelerinde kumandadan verilen sinyalin tersi gözükürse o
kanal reverse edilmelidir.
4.6.1.4.Uçuş modları
Bu kısımda farklı uçuş modları bulunmaktadır [8]:
Acro
Stabilize
Simple
Auto
RTL
Guided
Position
Loiter
Circle
APM'de ayarlı olan mod “stabilize” dir. İlk uçuşlarda da bu modda uçulması
tavsiye edilir. Fakat değiştirilmek istenildiğinde ayar şu şekilde yapılmaktadır:

33
• Kumandadan 5. Kanala 2 ya da 3 konumlu anahtar atanır. Bunu kumanda
ekranındaki ayarlar-kanal kısmından yapılır. Kanal 5’in karşısında bulunan kanal
ismi NULL’dur. Buna tıklayarak bunun herhangi 2 ya da 3 portlu anahtarlara
atanması yapılır.
• Mission planerdaki flight modes ekranında, uçuş modu için ayarlanılan anahtar
hareket ettirildiğinde barlar arasındaki geçiş görülür. İstenilen mod değişen
barlara içerisine girilerek seçilebilir.
Genellikle uçuş alıştırmalarından yani ilk uçuşlardan sonra AltHold modu tercih
edilmektedir.
4.6.1.5. Donanım seçenekleri (Hardware options)
Bu kısımda çeşitli donanım seçenekleri bulunmaktadır. Kullanılan donanıma göre
seçim yapılmalıdır. Örneğin pusula, kamera vs. Pusula bir hava aracı için olmazsa olmaz
donanımlardan bir tanesi olduğu için kesinlikle kullanılmalıdır. Hava araçlarında pusula,
aracın yönünü bulmasını sağlayan sensördür. Kalibrasyon işlemi şu şekilde yapılır:
“Live Calibration” a tıklanır.
Quadro kendi ekseni etrafında hem yatay hem dikey olmak üzere 30 sn içerisinde
saat yönü ve tersi yönde döndürülür.
İşlem 30 sn içerisinde yapıldıktan sonra onay kutucuğu gelir. Onayın kabul
edilmesiyle pusula ayarı yapılmış olur.
4.6.1.6. Arducopter level
Bu kısımda frame mod seçimi ve akselerometre kalibrasyonu yapılır. Firmware
güncellemesi kısmında seçilen model ekranda yazar. Eğer burada yazan gövde tipi seçilen ya
da kullanılacak olan gövde değilse değiştirilmelidir.
Akselerometre diğer adıyla ivmeölçer, 3 eksen de aracın hızlanmasını ölçen
sensördür.
“Calibrate accel” linkine tıklanarak akselerometre ayarı yapılır. Bu sensör
sayesinde hava aracı daima yere paralel hale gelmek için gerekli bilgileri kontrol kartına iletir.
34
Ardupilot Mega kontrol kartında kalibrasyon ayarları içerisinde yer almasa da ESC
kalibrasyonu yapılır. Bunun için 2 farklı yol vardır. Bunlar uygulama konusunda detaylı
şekilde anlatılacaktır.
APM kontrol kartı için ESC ayarları şu şekilde olmalıdır:
• Brake: OFF
• Battery Type: LiPo
• CutOff Mode: Soft-Cut
• CutOff Threshold: Medium
• Start Mode: Normal
• Timing: MEDIUM
4.6.2. APM terminal sayfasındaki kodlar ve tanımlamaları
Terminal kısmı Mission Planer ara yüzünde üst kısımda bulunmaktadır. Bu kısımda
APM uçuş kontrol kartının kalibrasyon ayarları yapılır. Ayrıca yapılan sistem ayarlarının
gösterilmesi için de kullanılır. Terminal kısmında açılan siyah ekrana konsol denir. Buraya
bazı kodlar yazılarak istenen işlemler gerçekleştirilir. Örneğin, bu ekrana yazılan belli
kodlarla kumanda, motor, akselerometre kalibrasyon ayarları yapılabilmekte ve yapılan
ayarlar da görülebilmektedir.
Terminal ekranında çalışmak için kullanılacak kodlar konsola “help” komutunun
yazılmasıyla ekranda belirir.
Konsola yazılacak kodlar:
1. logs : Adından da anlaşılacağı gibi APM çalıştırıldığında yapılan kayıtlara ve bu kayıt
işlemlerine ulaşmayı sağlayan komuttur.
Terminal ekranına "logs" komutu yazıldığında kayıtlar yanlarında numaraları ile
birlikte gelir, istenilen kayıta ulaşmak için konsola "dump kayıt numarası" (örnek dump 20)
yazılmalıdır. “logs” kodu altında yazılacak kodlar:
"dump 0" kayıta girmekle birlikte kayıtları siler.
"erase" komutu tüm kayıtları silmek için kullanılır.
35
"eneable" komutu ile durumu incelenmek istenen donanımın kayıt bilgileri görülebilir.
Örneğin "eneable: ATTITUDE_MED GPS PM CTUN NTUN
2. setup :Bu komut ile kontrol kartına yapılan ayarlamalara ulaşılmasının yanında belli
donanımların konfigüre ayarları da yapılabilmektedir. “setup” komutu altında yazılacak
komutlar:
"erease" komutu :Bu komut kontrol katını sıfırlamaya yarayan, sadece ilk kurulum esnasında
kullanılması tavsiye edilen temizleme komutudur.
"reset" komutu: EEPROM’daki verileri sıfırlamaya yarayan komuttur.
"radio" komutu: Kumanda kalibrasyon işlemini gerçekleştiren komuttur. Örneğin gaz
kolunun bağlı olduğu kanal 3’ün gaz kolu seviyesinin en alt ve en üst noktaları buradan
belirlenir. Bu komutu kullanabilmek için kumanda ve alıcı açık olmalıdır, yani pil takılı
olmalıdır.
"frame" komutu: Yapılan hava aracının hangi tipte olduğunu görmeye yarayan komuttur.
Daha önceden yapılan frame ayarının kontrolü bu komut ile yapılır.
"motors" komutu: Bu komutu kullanabilmek için pil takılı olmalı yani motorlara güç
verilmelidir. Bu komut sayesinde ESC ve motor ayarları yapılır. Konsola bu komutu girdikten
sonra gelen talimatlara göre motor yönleride belirlenebilir.
"level" komutu: Akselerometre ve gyroskop başlangıç ayarlarını yapmaya yarayan komuttur.
“level” komutu araç dengede uçmadığında mutlaka konsola yazılarak kalibrasyon
yapılmalıdır. Kalibrasyondan sonra konsolda çıkan gyro ve akseleromete değerlerinin
kaydedilmesi bir sonraki kalibrasyon için fayda sağlar.
"accel" komutu: Bu komut kesinlikle ilk uçuştan önce ve dengede olmayan uçuşlar sonrası
kesinlikle konsola yazılmalı ve akselerometre ayarı yapılmalıdır. Komut konsola yazıldığında
kullanıcıdan aracı belli konumlara getirip herhangi bir tuşa basılmasını isteyecektir. Örnek
sürüm (V.2.9.1) için bu adımlar sırasıyla şu şekildedir:
1-APM kontrol kartını sol tarafa yatırın yani quadrokopterin sol tarafı üzerine yere dik bir
şekilde tutun ve bir tuşa basın.
2- APM kontrol kartını sağ tarafa yatırın yani quadronuzu sağ tarafı üzerine yere dik bir
şekilde tutun ve bir tuşa basın.

36
3- APM kontrol kartını burun aşağı gelecek şekilde yatırın yani quadronuzu önü yere bakacak
şekilde yere dik bir şekilde tutun ve bir tuşa basın.
4-APM kontrol kartını burun yukarı olacak şekilde yani quadronun ön kısmı yukarı bakacak
ve yere dik bir şekilde olacak şekilde tutun ve bir tuşa basın.
5-APM kontrol kartını ters çevirin yani quaronun üst kısmını alta gelecek şekilde yani
motorların üzerine binecek şekilde yere paralel koyun ve bir tuşa basın.
6-Kalibrasyon başarılı mesajını görmezseniz tekrar bu işlemleri yapın.
Akselerometre ayarına "Configuration" kısmında sol taraftan "Arducopter Level"
linkinden de ulaşılabilir.
"modes" komutu: Bu komut ile aracın hangi modlarda uçtuğu görülür. Ya da mod ataması
buradan yapılabilir.
"compass" komutu: Bu komut ile pusula (magnetometre ) devreye alınır ya da devre dışı
bırakılır. Ek olarak okuduğu değer de bu komut ile görülebilir.
"show" komutu: Bu komut ile APM’e yapılan tüm ayarlamalar ve tüm özellikler görülebilir.
3. tests :Bu komut ile kontrol kartının tüm fonksiyonları ve takılan tüm harici donanım
terminalden test edilir.
Örneğin, GPS’i test etmek için konsola ilk olarak "test" komutu ve peşinden "gps"
komutu yazarak GPS’den okunan konum bilgileri ve GPS’in bulduğu uydu sayısı görülür.
Nelerin test edilebileceği test komutundan sonra yazılan "help" komutuyla görülebilir.
Belli bir komuttan çıkmak ya da terminalde çıkmak için "exit" komutu kullanılmalıdır.
4.6.3.APM ‘de telemetri verilerinin kaydedilmesi
Ardupilot Mega kartların üzerinde birçok sensör bulunmaktadır. Bu sensörlerden
alınan veriler Mission Planer ekranında APM ile bilgisayar arasında bağlantı olduğunda
görülür. Uçuş aşamasında kaydedilen sensör verileri uçuşun daha sonradan incelenmesine
olanak sağlar. Uçuşta APM ile bilgisayar arasındaki bağlantı çeşitli RF haberleşme
modülleriyle sağlanır. Örneğin xbee ya da 3DR modülleri sayesinde uçuş boyunca elde edilen
tüm veriler Mission Planer ekranında izlenebilmektedir. Bu verilerin sonradan incelenmek
üzere kaydedilme işlemi 2 şekilde gerçekleştirilir:

37
Onboard data flash memory denilen kartın üzerine takılan bellek uçuşta,
sensörlerden alınan verileri kaydeder. Yani sadece uçuş bittiğinde bu verilere
ulaşılabilinir.
Xbee ya da 3DR telemetri sistemi kullanılarak hem uçuşta hem uçuş sonrası bu
veriler elde edilir. Xbee ile haberleşme işlemi çalışmanın ileriki bölümlerinde
incelenmiştir.
Xbee ya da 3DR telemetri sistemlerinden alınan veriler mission planer vasıtası ile
logs dosyaları içerisine “togs” uzantılı olarak kaydedilir. Bunların izlenebilmesi için
şunlar yapılır:
1- Mission Planer açılır.
2- Çıkan ekranın sol alt tarafında “Telemetry Logs” linkine tıklanır.
3- Load log linkine tıklanır.
4- Açılan sayfadan istenilen tarihteki kayıt seçilir.
5- Play tuşuna basılır.
6- Kaydedilen tüm veriler ekranda simüle edilecektir.
7- Verilerin grafiksel olarak sunulması için açık olan sayfanın altında bulunan
“tuning” kutucuğu işaretlenir.
4.6.4. Wokoong Multi Rotor uçuş kontrol kartı
DJI Wookong Multirotor kontrol sistemi oldukça stabil, alanında öncü ve sürekli
üzerinde çalışılan kaliteli bir sistemdir. Açık kaynak kodlu olmadığı için bilimsel anlamda
çalışmalar için kullanılan bir kontrol kartı değildir. Hava aracına montajı esnasında dikkat
edilmesi gereken noktalar vardır.
DJI WKM sistemi GPS özelliği sayesinde kendini sabitler, dengede tutar, GPS ile
istenilen rotoya uçuş sağlanır ve fail safe özelliğiyle eve dönüş yapılır. Öncelikle burada
kullanılacak olan malzemeler hakkında bilgi sahibi olunması gerekir.
WKM kontrol kartını oluşturan başlıca malzemeler şunlardır:
1- MC (ana konrol kartı)
2- IMU
3- GPS/Pusula
4- PMU (Güç dağıtım ünitesi)

38
5- Led ışığı
MC ana kontrol ünitesidir. Bu ünite sistemin beynidir. Kontrol işlemi bu ünite
tarafından gerçekleştirilir. Imu, GPS, pusula, ESC ve kumanda ile haberleşerek
quadrokopterin uçmasını ve otopilot fonksiyonunun çalışmasını sağlar. Üzerinde bulunan
USB girişi ile bilgisayara bağlanıp konfigürasyon ve kalibrasyon ayarları yapılır, kullandığı
yazılım güncellenebilir.
IMU atalet ölçme sistemi olarak tabir edilen sensörlerin bulunduğu ünitedir. 3 eksenli
1 adet ivmeölçer, 3 eksenli 1 adet gyro ve 1 barometre içerir. Bu sayede hava aracının yere
göre hareketini algılar ve buna göre ana kontrol ünitesine veri göndererek hava aracının stabil
uçmasını sağlar. IMU montajı çok önemlidir.
Şekil 4.20. WKM kontrol ve sensör kartı
GPS/Pusula aracın pozisyon ve yönünü belirlemede kullanılan uydu ile haberleşerek
bu görevi yerine getiren ve gerekli sinyalleri MC’ye gönderen ünitedir. Bu modül manyetik
etkileşimlere karşı duyarlı olduğundan dolayı montaj işlemi DJI firmasının gönderdiği ayak
üzerine yapılır. Montajının yapıldığı yer elektronik ekipmanlardan olabildiğince uzak
olmalıdır (Şekil 4.21).

39
Şekil 4.21. GPS/Pusula
Led ışığı sitemin farklı durumlara tepkisini göstermek için kullanılan elemandır. Uçuş
modu bilgisi, GPS’in kaç adet uydu bulduğunun bilgisi, pusula kalibrasyon işlemi bu gösterge
sayesinde gözlemlenebilir. Uçuş esnasında görülebilen bir yere montajının yapılması gerekir
(Şekil 4.22).
Şekil 4.22. Led ışığı göstergesi
MC’yi kumanda alıcısına bağlamak için 3’lü servo kablosu kullanılır. Böylece
kumandadan yollanılan sinyaller MC’de işlenerek gerekli kontrol işlemleri yapılır.
PMU yani enerji yönetim ünitesi WKM için özel olarak yüksek enerji tüketimini
çözmek adına kullanılır. WKM sistemi, alıcı, pil voltmetresi ve 2 CAN BUS arayüzü için ayrı

40
ayrı 2 adet enerji çıkışı vardır. Bu bağlantılarda DJI’nın gönderdiği enerji bağlantı kablosu
kullanılır (Şekil 4.23).
Şekil 4.23. PMU-Enerji güç ünitesi
WKM kontrol kartını kullanmadan önce üretici tarafından belirtilen şu kurallara
uyulması gerekir :
• Sistem ayarları esnasında ESC’ler ya da pervaneler sökülmelidir.
• IMU kesinlikle üst kısmı aşağıda (yani gövdeye montaj yapılan taraf) olacak şekilde
monte edilmemelidir.
• Farklı bir alıcı ile kullanılacaksa yani alıcı değiştirilecekse kumanda ayarları tekrar
yapılmalıdır.
• GPS/Pusula modülü manyetik etkileşimlere karşı hassas olduğundan elektronik
kısımdan uzağa monte edilmelidir. Özellikle kumanda alıcısından ve haberleşme
yapan diğer ünitelerden (fpv, xbee) uzakta olmalıdır.
• WKM’nin ayarlamalarının yapıldığı Assistant programından kumanda ayarı
yapılırken,
• GAZ: Slide sola araç aşağı, slide sağa araç yukarı
• RUDDER (KUYRUK): Slide sola burun sola, slide sağa burun sağa
41
• ELEVATOR: Slide sola araç geri, slide sağa araç sağa
• AILERAON: Slide sola araç sola, slide sağa araç sağa.
konumlamaları gözlemlenmelidir.
• Hava aracı çalıştırılacağı zaman önce kumanda açılır. Daha sonra aracın pil bağlantısı
yapılır. Kapatırken de önce aracın pil bağlantısı sökülür daha sonra kumanda kapatılır.
• LED indikatöründe kırmızı ışığın yanıp sönmesi sinyalin zayıf olduğunu belirtir. Bu
durumda araç kesinlikle GPS modunda açılmamalıdır.
• Ayarlar esnasında Assistant programında gimbal kontrol bölümü açıldığında, F1 ve F2
çıkışlarında enerji olduğu görülür. Bu sebepten bu portlar ESC’lere bağlanmamalıdır.
• Gaz kolunun fail safe konumu son noktanın %10 dan daha aşağısına
ayarlanmamalıdır.
• Gaz kolu konumu uçuşta her zaman gaz kesiminden (throttle cut) % 10 fazla
olmalıdır.
• Uçuşta düşük voltaj uyarılarında herhangi bir kazaya sebep olmaması için hava aracı
yere indirilmelidir.
• Hava aracı yerdeyken gaz kolu en alta çekilirse motorlar 3 sn içinde durur. Uçuş
esnasında gaz kolu throttle cut’tan her zaman % 10 daha fazla olmalıdır. Manuel
modda eğer gaz kolu throttle cut değerinin %10 üstünde değilse motorlar aniden durur.
Motor durduktan sonra 5 sn içerisinde gaz kolu %10’dan fazla değere getirilirse
motorlar yeniden çalışır.
Ana uçuş kontrol kartındaki portların tanıtımı şu şekildedir;
A :roll kontrolü (sol/sağ) M6: 6 numaralı rotor
E :pitch kontrolü(ileri/geri) M5: 5 numaralı rotor
T: gaz kontrolü yada gimbal roll servosu M4: 4 numaralı rotor
R: rudder kontrolü yada gimbal pitch
servosu
M3: 3 numaralı rotor
U: kontrol mod düğmesi için M2: 2 numaralı rotor
X1: voltaj göstergesi M1: 1 numaralı rotor
42
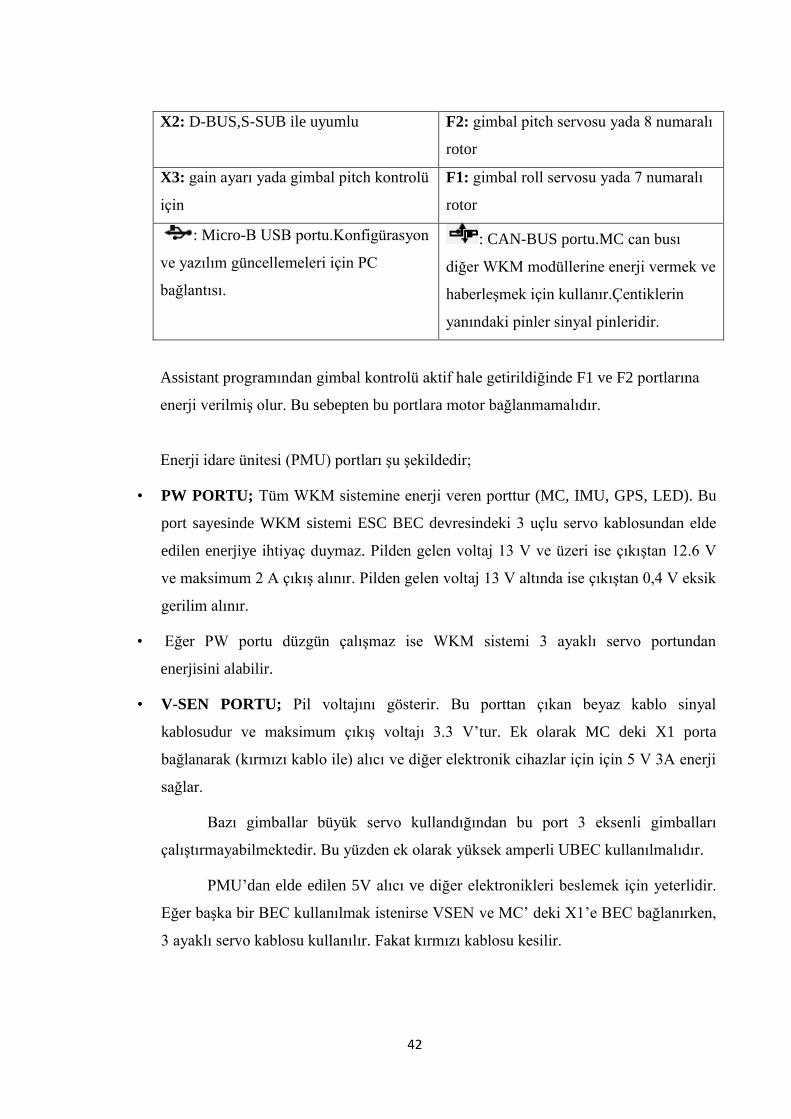
X2: D-BUS,S-SUB ile uyumlu F2: gimbal pitch servosu yada 8 numaralı
rotor
X3: gain ayarı yada gimbal pitch kontrolü
için
F1: gimbal roll servosu yada 7 numaralı
rotor
: Micro-B USB portu.Konfigürasyon
ve yazılım güncellemeleri için PC
bağlantısı.
: CAN-BUS portu.MC can busı
diğer WKM modüllerine enerji vermek ve
haberleşmek için kullanır.Çentiklerin
yanındaki pinler sinyal pinleridir.
Assistant programından gimbal kontrolü aktif hale getirildiğinde F1 ve F2 portlarına
enerji verilmiş olur. Bu sebepten bu portlara motor bağlanmamalıdır.
Enerji idare ünitesi (PMU) portları şu şekildedir;
• PW PORTU; Tüm WKM sistemine enerji veren porttur (MC, IMU, GPS, LED). Bu
port sayesinde WKM sistemi ESC BEC devresindeki 3 uçlu servo kablosundan elde
edilen enerjiye ihtiyaç duymaz. Pilden gelen voltaj 13 V ve üzeri ise çıkıştan 12.6 V
ve maksimum 2 A çıkış alınır. Pilden gelen voltaj 13 V altında ise çıkıştan 0,4 V eksik
gerilim alınır.
• Eğer PW portu düzgün çalışmaz ise WKM sistemi 3 ayaklı servo portundan
enerjisini alabilir.
• V-SEN PORTU; Pil voltajını gösterir. Bu porttan çıkan beyaz kablo sinyal
kablosudur ve maksimum çıkış voltajı 3.3 V’tur. Ek olarak MC deki X1 porta
bağlanarak (kırmızı kablo ile) alıcı ve diğer elektronik cihazlar için için 5 V 3A enerji
sağlar.
Bazı gimballar büyük servo kullandığından bu port 3 eksenli gimbalları
çalıştırmayabilmektedir. Bu yüzden ek olarak yüksek amperli UBEC kullanılmalıdır.
PMU’dan elde edilen 5V alıcı ve diğer elektronikleri beslemek için yeterlidir.
Eğer başka bir BEC kullanılmak istenirse VSEN ve MC’ deki X1’e BEC bağlanırken,
3 ayaklı servo kablosu kullanılır. Fakat kırmızı kablosu kesilir.
43
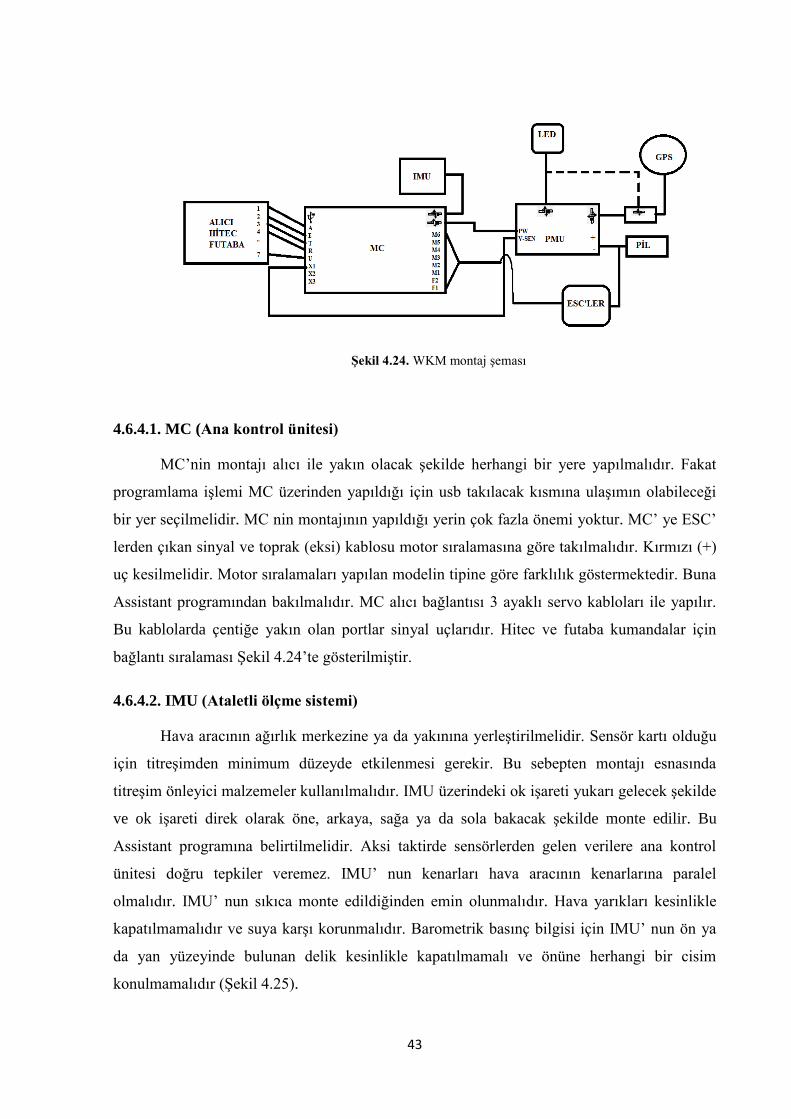
Şekil 4.24. WKM montaj şeması
4.6.4.1. MC (Ana kontrol ünitesi)
MC’nin montajı alıcı ile yakın olacak şekilde herhangi bir yere yapılmalıdır. Fakat
programlama işlemi MC üzerinden yapıldığı için usb takılacak kısmına ulaşımın olabileceği
bir yer seçilmelidir. MC nin montajının yapıldığı yerin çok fazla önemi yoktur. MC’ ye ESC’
lerden çıkan sinyal ve toprak (eksi) kablosu motor sıralamasına göre takılmalıdır. Kırmızı (+)
uç kesilmelidir. Motor sıralamaları yapılan modelin tipine göre farklılık göstermektedir. Buna
Assistant programından bakılmalıdır. MC alıcı bağlantısı 3 ayaklı servo kabloları ile yapılır.
Bu kablolarda çentiğe yakın olan portlar sinyal uçlarıdır. Hitec ve futaba kumandalar için
bağlantı sıralaması Şekil 4.24’te gösterilmiştir.
4.6.4.2. IMU (Ataletli ölçme sistemi)
Hava aracının ağırlık merkezine ya da yakınına yerleştirilmelidir. Sensör kartı olduğu
için titreşimden minimum düzeyde etkilenmesi gerekir. Bu sebepten montajı esnasında
titreşim önleyici malzemeler kullanılmalıdır. IMU üzerindeki ok işareti yukarı gelecek şekilde
ve ok işareti direk olarak öne, arkaya, sağa ya da sola bakacak şekilde monte edilir. Bu
Assistant programına belirtilmelidir. Aksi taktirde sensörlerden gelen verilere ana kontrol
ünitesi doğru tepkiler veremez. IMU’ nun kenarları hava aracının kenarlarına paralel
olmalıdır. IMU’ nun sıkıca monte edildiğinden emin olunmalıdır. Hava yarıkları kesinlikle
kapatılmamalıdır ve suya karşı korunmalıdır. Barometrik basınç bilgisi için IMU’ nun ön ya
da yan yüzeyinde bulunan delik kesinlikle kapatılmamalı ve önüne herhangi bir cisim
konulmamalıdır (Şekil 4.25).
44
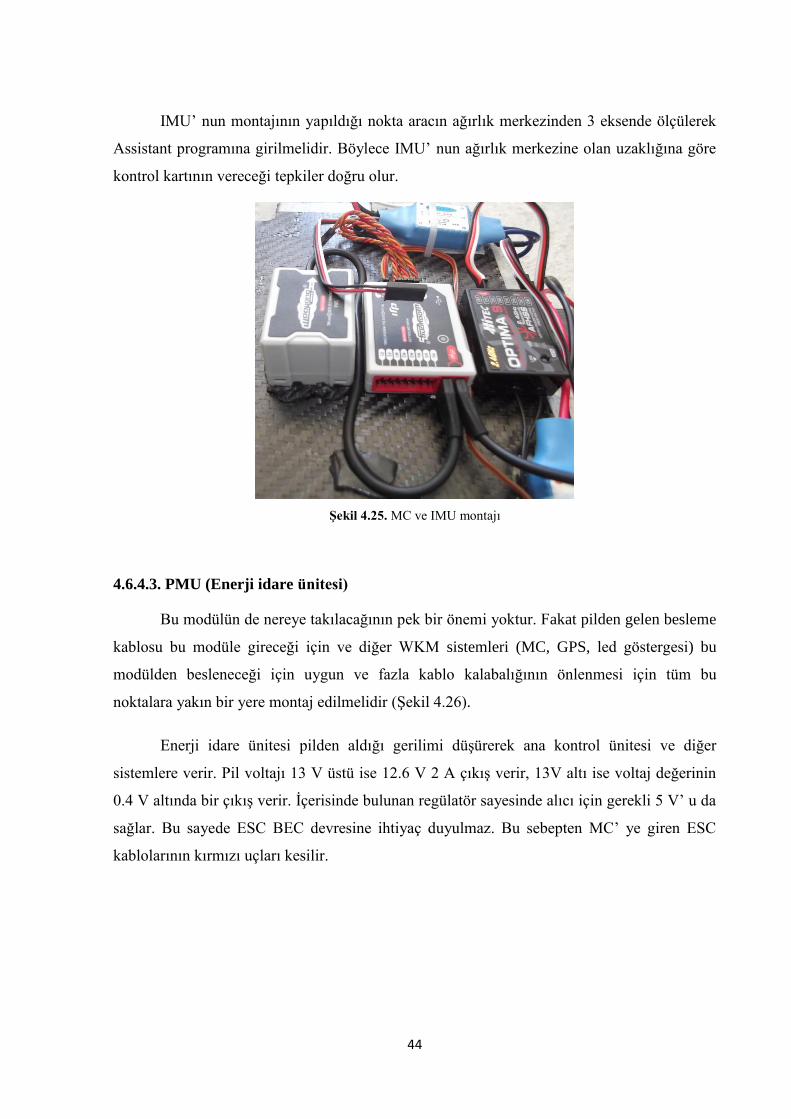
IMU’ nun montajının yapıldığı nokta aracın ağırlık merkezinden 3 eksende ölçülerek
Assistant programına girilmelidir. Böylece IMU’ nun ağırlık merkezine olan uzaklığına göre
kontrol kartının vereceği tepkiler doğru olur.
Şekil 4.25. MC ve IMU montajı
4.6.4.3. PMU (Enerji idare ünitesi)
Bu modülün de nereye takılacağının pek bir önemi yoktur. Fakat pilden gelen besleme
kablosu bu modüle gireceği için ve diğer WKM sistemleri (MC, GPS, led göstergesi) bu
modülden besleneceği için uygun ve fazla kablo kalabalığının önlenmesi için tüm bu
noktalara yakın bir yere montaj edilmelidir (Şekil 4.26).
Enerji idare ünitesi pilden aldığı gerilimi düşürerek ana kontrol ünitesi ve diğer
sistemlere verir. Pil voltajı 13 V üstü ise 12.6 V 2 A çıkış verir, 13V altı ise voltaj değerinin
0.4 V altında bir çıkış verir. İçerisinde bulunan regülatör sayesinde alıcı için gerekli 5 V’ u da
sağlar. Bu sayede ESC BEC devresine ihtiyaç duyulmaz. Bu sebepten MC’ ye giren ESC
kablolarının kırmızı uçları kesilir.

45
Şekil 4.26. PMU montaj ve bağlantısı
4.6.4.4. ESC ve motor
Motorlar, bilindiği üzere ESC’ lerin çıkışında bulunan 3 renk kabloya konektörler
kullanılarak bağlanır. Ayarlar esnasında ya bunlar sökülmeli ya da pervaneler sökülmelidir.
ESC lerin diğer tarafında bulunan 2 kabloya pilden çıkan uçlar bağlanmalıdır. Diğer 3 adet
servo kabloları ise kırmızı uçlar kesilerek MC’ye bağlanır. Burada motor numaraları
önemlidir ve Assistant programına bakılarak ayarlamalar yapılır. Yani Assistant
programındaki yönlendirmeler takip edilerek motor numaralarına göre ESC’ler MC’ye
bağlanır (Şekil 5.27). ESC ayarlarında governorun ve break in kapalı olduğundan ve normal
start up’ın seçili olduğundan emin olunmalıdır.
Şekil 4.27. + ve x mod motor sıralamaları ve yönleri

46
4.6.4.5. RC sistemi (Alıcı bağlantısı)
Öncelikle kumandadan gaz, rudder, aileron ve elevator kanalları ayarlanmalıdır.
Genellikle fabrika ayarlarında bu ayarlamalar şu şekilde yapılmıştır:
Kanal 1-Aileron
Kanal 2-Elevator
Kanal 3-Throttle
Kanal 4-Roll
Kumandadan uçuş mod düğmesi olarak 2-3 konumlu bir düğme atanmalıdır. Atama
işlemi kumandanın sistem menüsü altında channel kısmından yapılmaktadır. Uçuş modlarının
atandığı düğme kumandanın 7. kanalına atanmalıdır. Atanan kanallara göre alıcı MC’ ye
doğru bir şekilde bağlanmalıdır.
4.6.4.6.GPS/Pusula
Bu ünite manyetik etkileşimlere karşı hassastır ve elektronik cihazlardan uzağa monte
edilmelidir. Öncelikle GPS ayağını epoksi yapıştırıcı ile sağlam bir şekilde elektronik
parçalardan olabildiğince uzak bir yere monte etmek gerekir. GPS ayağının manyetik
olmaması gerekir (karbon kullanılabilir). GPS’in monte edileceği yer hava aracının boyuna
eksende orta noktası olur ise sapmalar azalır (Şekil 5.28).
Şekil 4.28. GPS/Pusula montajı

47
GPS, monte edilen ayak üzerine çift taraflı bant ile ok olan yüzey (logolu) havayı ve
hava aracının önünü gösterecek şekilde monte edilir. GPS titreşimden etkileneceği için
herhangi bir pervaneden en az 10 cm uzağa monte edilmelidir. Eğer başka bir ayak
kullanılacaksa, ayak manyetik olmamalıdır. GPS PMU’ nun enine eksenindeki
sembolün gösterdiği porta takılır.
GPS, takıldığı nokta aracın ağırlık merkezinden ölçülerek Assitant programına
bildirilmelidir. 3 eksende yapılacak bu ölçüm sayesinde GPS aracın orta noktasında olmasa
dahi sapmalar giderilir (Şekil 4.29).
Şekil 4.29. IMU ve GPS’ in ağırlık merkezine uzaklığı
4.6.4.7. Led göstergesi
GPS’ ten uzak bir yere diğer elektronik kısımların üzerine olmayacak şekilde monte
edilmelidir. LED’i uçuş esnasında görülebilecek yere koymak gerekir. 2 ayrı yere bağlantısı
yapılabilir. Bunlar PMU yan yüzeyindeki sembolünün oldu yer ya da GPS
adaptöründeki portlardır.
4.6.4.8. Assistant programı
Assistant programı WKM kontrol kartının konfigürasyon ayarlarının ve yazılım
güncell eştirmelerinin yapıldığı bir arayüz programıdır. Programın kurulumu şu şekildedir:
• Assistant programı ve sürücüleri webden yüklenir.

48
• MC usb kablosu ile bilgisayara bağlanır ve MC açılır (internet bağlı olmalıdır).
• Bilgisayarın driverı kendi kurması engellenir.
• DJI WOOKONG M DRİVER 32 bit ya da 64 bit klasörü açılır ve driver setup.bat
linkine 2 kez tıklanır.
• Asistant program klasörü açılır ve ardından setup.exe dosyası açılır.
Şekil 4.30. Assistant programı menüleri
1-TOOL:
DJI sunucusundan yazılımı ve WKM sistemini günceller.
:Düğmeleri etkisiz hale getirir.
Assitant programının son sürümünü günceller.
2-ABOUT:
WKM hakkında bilgi verir.
3- Dil
4-ENGLİSH

49
5-WRİTE:
Ekrandaki bilgileri MC’ ye aktarır. Değiştirilen parametreler ya da başlıklar kırmızı, kalın
harflerle gösterilir. Sistemi güncellemek için bu butona basılmalıdır. Opsiyonel seçimler write
butonuna basıldıktan sonra direk olarak MC’ ye yüklenir.
6- READ:
Ekrandaki sayfa için MC’deki parametreleri okur.
7-EXPORT:
Konfigürasyon bilgilerini dışarıya iletir.
8-IMPORT:
Dışarıdan konfigürasyon bilgilerini alır.
9-GRAPHIC GUIDANCE:
Grafik kılavuzu.
10-TEXT GUIDANCE:
Metin klavuzu.
11-CONTROL MODE:
Kontrol mod göstergesi
12- USB bağlantı kablosu yoluyla MC ile Assİstant programı arasında bağlantı
yapıldığında ESC’ lerde enerji olduğunu gösterir. ESC’ lerde ve motorlarda
enerji olmadığını ve ayarlarınızı güvenli bir şekilde yapacağınızı gösterir.
13-RED LIGHT: WKM bilgisayar bağlantısının olmadığını gösterir.
GREEN LIGHT: WKM bilgisayar bağlantısı sağlandığını gösterir.
BLUE LIGHT: WKM ile bilgisayar haberleştiğini gösterir.
4.7. Quadrokopterde Kullanılan Sensörler
Multikopter sistemleri otomatik kontrol mekanizmasına sahip kompleks sistemlerdir.
Multikopterlerin, kumandadan ana kontrol kartına gönderilen sinyallere bağlı kalarak stabil
uçması mümkün değildir. Stabil uçuş için çeşitli sensörlerden aldıkları verileri kullanarak baş
50
açılarını, yönlerini ve yere göre konumlarını bilmeleri gerekir. Bir quadrokopterde bulunması
gereken başlıca sensörler şunlardır:
Gyroskop
İvmeölçer (akselerometre)
Barometrik basınç sensörü
Pusula (compass=magnetometre)
Bu sensörlerden jiroskop (gyro-gyroskop) denge sensörüdür. Quadronun üç eksende
meydana getirdiği açısal değişimi algılar. Pilotun hiçbir kontrol mekanizmasına etkisi
olmadığı durumlarda araca gelen dış etkenleri algılayarak aracın dengeye ulaşması için uçuş
kontrol kartına sinyal gönderir.
Akselerometre hava aracının uçuşunda büyük kolaylık sağlayan vazgeçilmez
sensörlerdendir. 3 eksende hava aracının ivmelenmesini ölçerek aracın yere paralel olmasını
sağlar.
Pusula (compass =magnetometre) hava aracının yönünü bulmasını sağlayan yani hava
aracına yönünü öğreten sensördür. Manyetik kuzey noktasını referans nokta olarak belirler.
Bu sensörün takılacağı yere dikkat edilmelidir. Çünkü aracın yönü bu sensöre bağlıdır. Ek
olarak manyetik kuzey noktası her ülkede yıllara göre değişiklik gösterdiği için yazılım
kısmında bu sensörle ilgili bölümde değişiklik yapılmalıdır.
Barometrik basınç sensörü hava basıncını ölçerek hava aracının yüksekliğinin
sabitlenmesi için kullanılır [9]. Üzerine düşen basıncı analog sinyale çevirir ve uçuş kontrol
kartına bu şekilde iletir.
4.7.1. Ardupilot Mega kontrol kartında kullanılan sensörler
Ardupilot Mega uçuş kontrol kartında kullanılacak sensörler bir kart içerisinde
birleştirilmiştir. Tüm sensörleri içeren bu kart IMU’dur. Üzerinde 3 eksen gyroskop, 3 eksen
ivmeölçer ve barometrik basınç sensörleri bulunur (Şekil 4.31). Harici olarak pusula sensörü
takılabilir.

51
Şekil 4.31. IMU sensor kartı
4.7.1.1. Pusula sensör montajı
APM kontrol kartına pusula sensörü 2 şekilde entegre edilir. İlk yöntem Şekil
4.32’deki gibi direk olarak IMU üzerinde pusula için ayrılmış kısma 4 header
lehimlenerek yapılır. Fakat bu yöntemde pusula sensörü aracın tam merkez noktasına
denk gelmediği için sapmalara sebep olur. Pusula üzerindeki portlar IMU ileri yönü
gösterecek şekilde sırasıyla şunlardır:
1- Ground
2- + besleme (VCC)
3- SDA (I2C serial data)
4- SCL (I2C serial clock)
Şekil 4.32. IMU üzerine pusula sensör montajı

52
Diğer yöntem ise Şekil 4.32’de port girişi diye isimlendirilen erkek konektöre
pusulanın montajıdır. Bu işlem pusulanın çıkışlarına Şekil 4.33’deki gibi kablo ve dişi
konektör takılarak yapılır. Kablonun aracın merkez noktasına yetişecek kadar uzun olması
gerekir. Pusula montajı ağırlık merkezinin bulunduğu kısma yani orta noktaya
yapılmalıdır.
Şekil 4.33 IMU üzerine konektör ile pusula montajı
4.8. Telemetri Sistemi
Telemetri uzaktan izleme demektir. İstenen verileri anlık olarak kablosuz yöntemlerle
ileten veri izleme ve kontrol sistemi olarak da tanımlanabilir. Quadrokopterlerde uçuş
esnasında yer kontrol istasyonlarında bazı verilere ihtiyaç duyulur. Bu veriler uçuş sonrası
analizler için ve insansız uçuş esnasında meydana gelebilecek sorunların yer kontrol
istasyonlarından anlık izlenerek kontrol edilmesinde kullanılır. Yer kontrol istasyonları için
en önemli veriler şu şekilde gerekçeleri ile belirtilir:
Pil voltaj sensörü: Bu sensör hava aracında kullanılan pilin voltaj durumunu
gösterir. Sensörün sağladığı veri sayesinde kullanılan pilin ne kadar sürede deşarj
olacağı ve inişin yapılması gereken zaman öğrenilir. Her ne kadar uçuş süresi
pilin ve motorların değerlerine göre hesaplansada bu veri sayesinde kesin veriye
ulaşılır ve hava aracının kırıma uğraması önlenir.
Motor sıcaklık bilgisi: Motorun dönmeyen kısmında metal yüzeye monte edilen
sensör motorun anlık sıcaklık değerini telemetri sistemi vasıtası ile yer
istasyonlarına gönderir (Şekil 4.34). Bu veri sayesinde limit ısınma değerini aşan
motorların sargıları yanmadan iniş gerçekleştirilir. Böylece kırım önlenmiş olur.
Ek olarak bu veri uçuş sonrası analizlerde çok önemlidir. Sensör verilerine göre
ne kadarlık devirde ve itkide motorun ne kadar ısındığı incelenerek motor
özelliklerine ulaşılabilir.

53
Şekil 4.34. Motor sıcaklık sensörü
Pil sıcaklık bilgisi: Quadrokopter gibi elektrikli hava araçlarında verimli olmaları
sebebi ile lipo piller kullanılır. Ancak lipo piller ısınmaya karşı direnci az, yangın
tehlikesi yüksek pillerdir. Bu yüzden pilin sıcaklığını ölçmek ve yer
istasyonundan anlık olarak izlemek önemlidir. Belli limitler dışına çıktığında
aracın indirilerek havada yanması ve tehlike saçması önlenir.
Rpm bilgisi: Dakikadaki devir sayısını ifade eder. Pervaneyi görebileceği bir
noktaya monte edilen bu sensör sayesinde verilen itki değerine göre motor
devrinin değişimi incelenir (Şekil 4.35). Bu sayede motor özellikleri tespitinde ve
motorun üreteceği tork hesabında kullanılır.
Şekil 4.35. RPM sensör montajı
GPS verisi: GPS (global positioning system) küresel konumlama sistemidir.
Uzayda bulunan 18’i asıl 6’sı yedek olmak üzere 24 uydudan oluşur. Uydular
sürekli olarak kodlanmış bilgi yollarlar. GPS sensörü de sürekli yollanan bu
kodlanmış bilgileri çözerek konum ve zaman belirleme işlemlerini yerine getirir.
Quadrokopterde konum belirleme işlemi ve otonom uçuşlarda ihtiyaç duyulur.

54
Uzun menzilli uçuşlarda hava aracının nerede olduğunu belirlemek için oldukça
önemli bir veridir. Hava araçlarında tam konum belirleyebilmesi için en az 4
uydu bulması gerekir. 3 tanesi x, y, z koordinatları 1 tanesi zaman bilgisi içindir.
Quadrokopter üzerinde montajı elektronik cihazlardan ve özellikle RF
haberleşme yapan alıcı ya da kamera vericisinden uzakta olmalıdır (Şekil 4.36).
Şekil 4.36. GPS sensör montajı
Alınan bu sensör verilerinin iletilmesi için kullanılan telemetri sistemleri şu şekildedir:
1- Zigbee
2- Hitec telemetri kiti
3- 3DR
4.8.1. Zigbee telemetri sistemi
Zigbee verilerin kablosuz olarak bir noktadan başka bir noktaya iletimi için
kullanılan haberleşme sistemidir. Radyo frekans haberleşmesi ile anlık olarak verileri iletir.
Düşük güç tüketimi, küçük boyutlarda olması, düşük maliyet ve birden fazla noktada
haberleşme imkânlarıyla oldukça avantajlı bir sistemdir. Çalışma boyunca zigbee ile aynı
anlama gelen xbee kullanılacaktır.
Xbee ile point to point denilen 2 modül arası haberleşme yapılabileceği gibi point to
multi point denilen birden fazla modülün haberleşmesi de yapılabilir. Bu yüzden özellikle
birden fazla noktada yapılacak kontrol ve izleme işlemleri için oldukça kullanışlı bir
sistemdir. Haberleşme protokolü olarak TCP/IP (Tranmission Control Protocol/Internet
Protocol) kullanır. Protokol, bir iletişim sürecinde bağlantıyı sağlayan noktalar arasında
sürekli gidip gelen mesajlaşmayı düzenleyen kurallar dizisidir.

55
Point to multi point sistemi ya da yıldız topolojisinde merkezde koordinatör bulunur,
diğer tüm cihazlar koordinatör ile noktadan noktaya haberleşir (Şekil 4.37). Mesajlaşma
işlemi koordinatör üzerinden yapılır. Yani gönderilecek veri ya da alınacak veri direk
koordinatör üzerinden alınır.
Şekil 4.37. Yıldız topolojisi
Xbee ile haberleşebilmek için gerekli modüller (Şekil 4.38) şu şekildedir:
1- Xbee modülü
2- Xtreambee board
3- Xtreambee USB adaptör
4- Anten
Şekil 4.38. Xbee kiti
2 xbee modülünün haberleşmesi için gerekli olan konfigürasyon ayarları şu
şekildedir:
1- 2 modülün birbirine tanıtılması gerekir. Yani adres ve haberleşme hızlarının aynı
olması gerekmektedir. Bunun için de bilgisayara DIGI firmasının hazırlamış
olduğu X-CTU ara yüz programı yüklenmelidir.
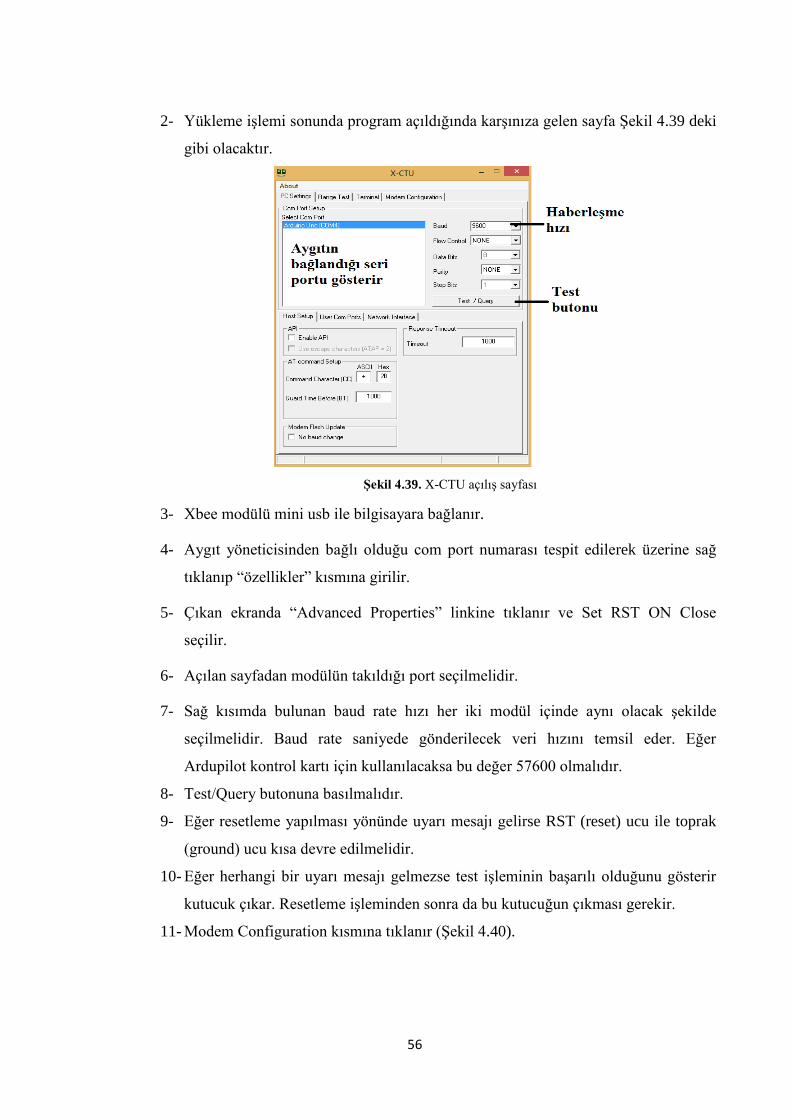
56
2- Yükleme işlemi sonunda program açıldığında karşınıza gelen sayfa Şekil 4.39 deki
gibi olacaktır.
Şekil 4.39. X-CTU açılış sayfası
3- Xbee modülü mini usb ile bilgisayara bağlanır.
4- Aygıt yöneticisinden bağlı olduğu com port numarası tespit edilerek üzerine sağ
tıklanıp “özellikler” kısmına girilir.
5- Çıkan ekranda “Advanced Properties” linkine tıklanır ve Set RST ON Close
seçilir.
6- Açılan sayfadan modülün takıldığı port seçilmelidir.
7- Sağ kısımda bulunan baud rate hızı her iki modül içinde aynı olacak şekilde
seçilmelidir. Baud rate saniyede gönderilecek veri hızını temsil eder. Eğer
Ardupilot kontrol kartı için kullanılacaksa bu değer 57600 olmalıdır.
8- Test/Query butonuna basılmalıdır.
9- Eğer resetleme yapılması yönünde uyarı mesajı gelirse RST (reset) ucu ile toprak
(ground) ucu kısa devre edilmelidir.
10- Eğer herhangi bir uyarı mesajı gelmezse test işleminin başarılı olduğunu gösterir
kutucuk çıkar. Resetleme işleminden sonra da bu kutucuğun çıkması gerekir.
11- Modem Configuration kısmına tıklanır (Şekil 4.40).

57
Şekil 4.40. Xbee modem konfigürasyonu
12- Always Update Firmware linki işaretlenir (Her zaman işaretli kalmalıdır).
13- Başlangıç ayarları görmek istenirse Show Defaults linkine tıklanır.
14- Read linkine tıklanır (2).
15- Networking kısmındaki ID kısmına (3) 3 ya da 4 digitlik rakamla adres yazılır.
Buraya yazılan ID diğer modüle de yazılacağı için unutulmamalıdır.
16- Serial Interfacing dosyası altındaki BD (baud rate) hızı (4) APM de kullanılacağı
için 6-57600 yapılmalıdır. Aynı BD hızı diğer modüle de girilecektir.
17- Write (5) butonuna tıklanır ve yapılan ayarların modüle yazılmasına izin verilir.
Burada eğer reset yapılması istenilirse ground ile reset portu kısa devre edilir.
18- Aynı işlemler xbee usb explorer kartına, diğer modülü takarak, diğer modüle de
uygulanır.
19- Bu işlemlerin bitmesi ile xbee’nin IMU’ya montajı yapılır (Şekil 4.41).
58
Şekil 4.41. Xbee IMU montajı
Burada modül üzerindeki TX, RX, +5V ve GRN (ground) portları IMU telem
kısmındaki ilgili portlara bağlanır (TX-IN; RX-OUT; +5V-5V; GRND-GRND).
20- Xtreambee usb explorer’a takılan diğer modül bilgisayara usb uzatma kablosu ile
bağlanır.
21- Mission Planer programı açılır. Sağ üst kısımdaki baud rate hızı 57600 seçilir.
22- Xbeenin takılı olduğu port seçilir.
23- Kumanda açılır.
24- Quadrocoptere enerji verilir.
25- Mission Planer’ın sağ üst köşedeki “connect” butonuna basılıp bağlantı kurulur.
26- Ekranda sensörlerden alınan veriler gözlenir.
4.8.2. Hitec telemetri sistemi
Hitec telemetri sistemi Hitec Aurora kumanda ile uyumlu kumanda telemetri
sistemidir. Yani kumanda ekranında sensörlerden aldığı verilerin sunulmasını sağlar. Aynı
zamanda kullanılan HPP 22 hitec ara yüzü sayesinde bilgisayara veri aktarımı da yapılır.
Hitec telemetri sisteminde bulunan sensörler şu şekildedir:
Sıcaklık sensörleri
RPM sensörü
Manyetik RPM sensörü
Pil voltaj sensörü
GPS sensörü
59
Bu sensörlerin araç üzerine montajı daha önceki kısımlarda açıklanmıştır.
Hitec telemetri sisteminde bu sensörlere ek olarak, sensörden alınan verileri işleyip
alıcıya ileten sensör istasyonu bulunur. Sensörlerin ve alıcının sensör istasyonuna bağlantısı
oldukça önemlidir. Aksi takdirde alınan veriler yanlış olabilir ya da alıcı zarar görebilir.
Bağlantı şu şekilde olmalıdır:
1- Sensör istasyonun sol üst tarafında yazan “D” (data) harfinin bulunduğu yer ile
alıcının sol kısmında bulunan data girişi birbirine bağlanır. Bu sayede sensör
istasyonuna iletilen veriler alıcı üzerinden kumandaya oradan da istenirse bilgisayara
iletilir. Verilerin bilgisayara iletilebilmesi için HPP-22 denilen USB modüle ihtiyaç
duyulur. Bu modülün alıcı ile haberleştirilmesi için birbirlerine tanıtılması gerekir.
2- Sensör istasyonu üzerindeki P (power) yazan kısma alıcının herhangi kanalından
alınan besleme kablosu (kırmızı-siyah) ya da harici bir kaynaktan 5V bağlanır (Şekil
4.42).
3- İstasyon üzerindeki diğer kısımlara sensör bağlantıları yapılmalıdır. G-gps, T-sıcaklık
(4 adet sıcaklık sensör girişi vardır), R-rpm (2 adet rpm sensör girişi vardır, bir tanesi
manyetik diğeri optik ölçüm yapar), F-fuel.
Şekil 4.42. Hitec telemetri sensör istasyonu – alıcı bağlantısı
Hitec telemetri siteminde düşük voltaj uyarısı şu şekildedir: Mavi led sabit yanarken
kırmızı ledin yanıp sönmesi bataryanın istenen değer altına düştüğünü gösterir. Bu durumda
sesli ikazda duyulur. İnişe geçilmelidir. Normalde kırmızı ledin sabit bir şekilde yanması pil
voltajının yeterli olduğunu gösterir.

60
5. QUADROKOPTER İLE ANLIK VERİ İLETİM UYGULAMASI
Dizaynı belirlenen gövde yapılır ve mekanik kısım tamamlanır. Yapılan gövdede
kullanılan malzemelerin hafif ve dayanıklı olması uçuşu daha verimli, hareket kabiliyeti
yüksek ve uzun süreli yapacaktır. Gövdede kullanılacak malzemeler: karbon, kompozit,
alüminyum gibi hafif ve dayanıklı malzemeler olmalıdır.
5.1. Kompozit Gövde Yapımı
İki veya daha fazla sayıdaki aynı veya farklı gruptaki malzemelerin, en iyi özelliklerini
bir araya toplamak ya da ortaya yeni bir özellik çıkarmak amacıyla, bu malzemelerin makro
seviyede birleştirilmesiyle oluşan malzemelere “kompozit malzeme” denir. Başka bir deyişle
birbirlerinin zayıf yönünü düzelterek üstün özellikler elde etmek amacı ile bir araya getirilmiş
değişik tür malzemelerden veya fazlardan oluşan malzemeler olarak da adlandırılabilir [10].
Kompozit gövde seçilmesinin bazı sebepleri şu şekilde sıralanabilir:
1- Yüksek mukavemet
2- Hafiflik
3- Tasarım esnekliği
4- Kalıplama kolaylığı
5- Kolay işlenilebilirlik
Bu kısımda yapılacak kompozit gövde karbon ve balsanın epoksi reçine ile
harmanlanmasından oluşturulacaktır.
Kompozit gövde yapımında karbon lif kullanılacağı için kesinlikle eldiven ve ağız
maskesi ile çalışılmalıdır. Özellikle ileriki kısımlarda anlatılacak olan trimleme kısmında
karbon tozu elektrik süpürgesi ile kesim yapılırken aynı anda çekilmelidir ve ek olarak
gözlükte kullanılmalıdır. Karbonun kanserojen etkisi göz önüne alınarak dikkatli
çalışılmalıdır.
Kompozit gövde yapım aşamaları şu şekildedir:
1- Yapılacak gövdenin üst yüzeyinin pürüzsüz olması için bir kalıp tespit edilir.
Kalıbın zeminin çok temiz ve kuru olması gerekir. Bunun için uygun kalınlıkta
kontraplak kullanılabilir (Şekil 5.1). Bu uygulama için kullanılan kontraplak 8 mm
kalınlığındadır.
61
Şekil 5.1. Karbon kalıbı için pürüzsüz kontra plak
2- Belirlenen gövde ölçülerine göre +1 cm olacak şekilde kontra plak üzerine
yapılması istenen gövde çizilir. Gövde ölçüleri motor-motor arası 68 cm, orta
tabaka 17x17 cm, kol kalınlığı 2 cm, gövde derinliği merkezde 1 cm kol uçlarında
0,5 cm dir.
3- Kontra plağın kenarlarına çift taraflı yüksek sıcaklığa uygun 3M diye tabir edilen
özel bantlar yapıştırılır. Bunların üst kısımlarının bandajı sökülmemelidir.
4- Karbon lifler ölçülerden +1 cm fazla olacak şekilde özel kesme aleti ile
kesilmelidir (Şekil 5.2). Kesmeden önce ölçünün alındığı kısım ortada kalacak
şekilde kâğıt bant ile karbon bantlanmalıdır. Aksi taktirde lifler zarar görür. Kesim
işleminde eldiven, maske ve gözlük kullanılmalıdır.
Şekil 5.2. Orta tabaka için karbon lif
5- Karbon liflerin arasına konulacak balsalar tam ölçüye göre kesilir. (Şekil 5.3).

62
Şekil 5.3. Karbon lifler arasına konulacak balsalar
6- Kullanılacak fazla reçinenin emilmesi için gözenekli kumaşlar (peel ply kumaş)
belirlenen ölçülerden +1 cm fazla kesilir.
7- Kullanılacak fazla reçinenin emilmesi için delikli naylonlar belirlenen ölçülerden
+1 cm fazla olmak kaydıyla kesilir (Şekil 5.4).
Şekil 5.4. Delikli naylon
8- Belirlenen ölçülerde vakum battaniyeleri kesilir.
9- Reçine ¼ oranın da sertleştirici (hardener) ve epoksinin birbirine karıştırılmasıyla
hazırlanır. Yani 4 gr epoksi için 1 gr sertleştirici kullanılır. Koyu bir kıvam
yakalayana kadar bir çubuk ile karıştırılmalıdır (Şekil 5.5).
Şekil 5.5. Epoksi hazırlanışı
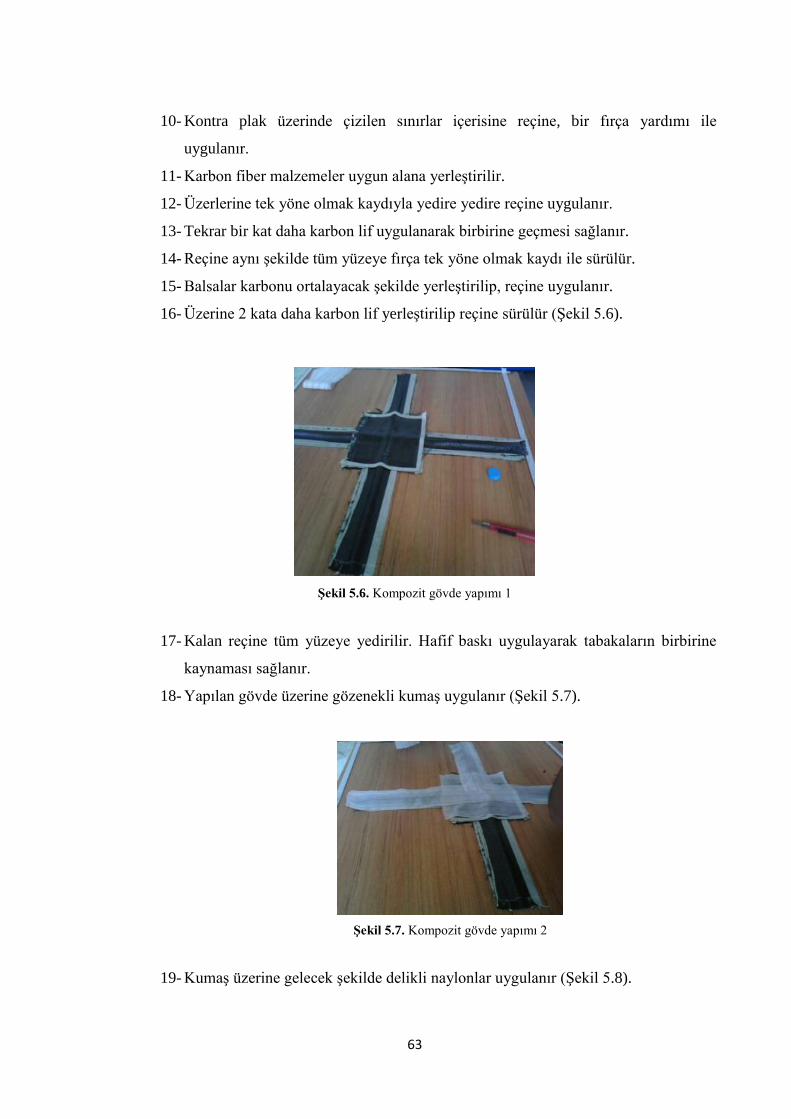
63
10- Kontra plak üzerinde çizilen sınırlar içerisine reçine, bir fırça yardımı ile
uygulanır.
11- Karbon fiber malzemeler uygun alana yerleştirilir.
12- Üzerlerine tek yöne olmak kaydıyla yedire yedire reçine uygulanır.
13- Tekrar bir kat daha karbon lif uygulanarak birbirine geçmesi sağlanır.
14- Reçine aynı şekilde tüm yüzeye fırça tek yöne olmak kaydı ile sürülür.
15- Balsalar karbonu ortalayacak şekilde yerleştirilip, reçine uygulanır.
16- Üzerine 2 kata daha karbon lif yerleştirilip reçine sürülür (Şekil 5.6).
Şekil 5.6. Kompozit gövde yapımı 1
17- Kalan reçine tüm yüzeye yedirilir. Hafif baskı uygulayarak tabakaların birbirine
kaynaması sağlanır.
18- Yapılan gövde üzerine gözenekli kumaş uygulanır (Şekil 5.7).
Şekil 5.7. Kompozit gövde yapımı 2
19- Kumaş üzerine gelecek şekilde delikli naylonlar uygulanır (Şekil 5.8).
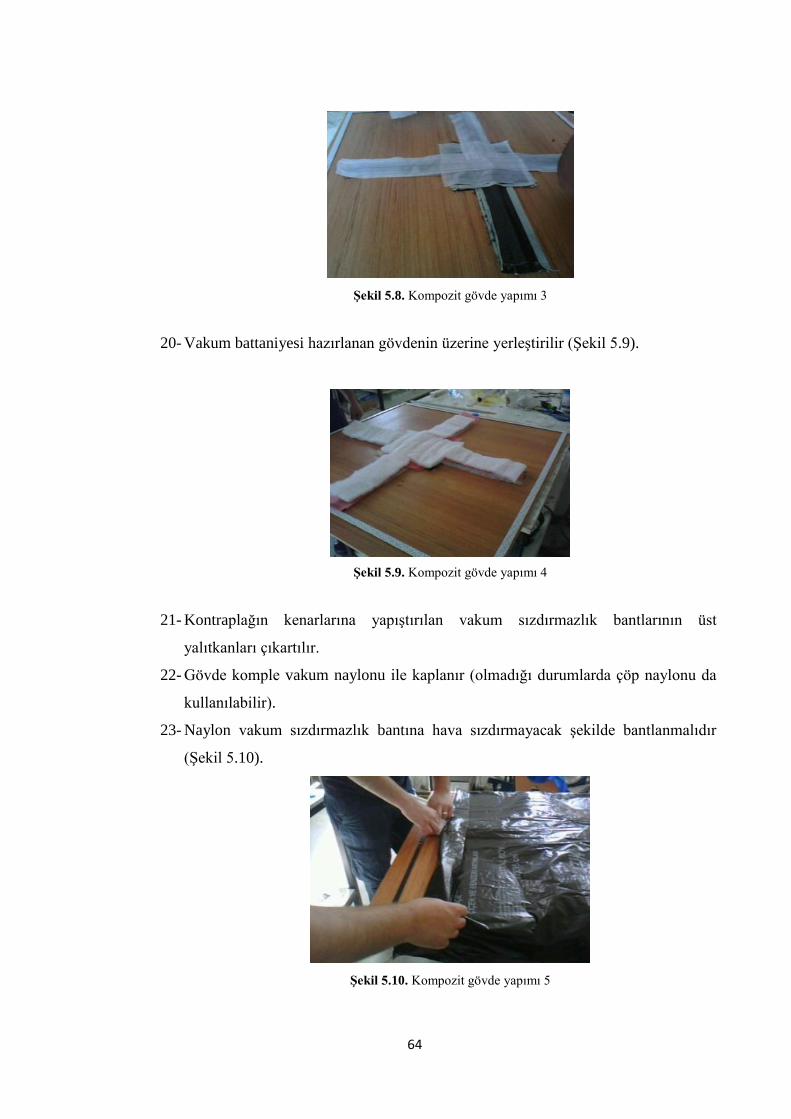
64
Şekil 5.8. Kompozit gövde yapımı 3
20- Vakum battaniyesi hazırlanan gövdenin üzerine yerleştirilir (Şekil 5.9).
Şekil 5.9. Kompozit gövde yapımı 4
21- Kontraplağın kenarlarına yapıştırılan vakum sızdırmazlık bantlarının üst
yalıtkanları çıkartılır.
22- Gövde komple vakum naylonu ile kaplanır (olmadığı durumlarda çöp naylonu da
kullanılabilir).
23- Naylon vakum sızdırmazlık bantına hava sızdırmayacak şekilde bantlanmalıdır
(Şekil 5.10).
Şekil 5.10. Kompozit gövde yapımı 5

65
24- Vakum pompasının hortumunun geleceği kısma vakum battaniyesi uygulanır.
25- Hortum kaymayacak şekilde yerleştirilir.
26- Vakum pompası çalıştırılır ve gövdeyi oluşturan yapının kaymaması için destek
verilir (Şekil 5.11).
Şekil 5.11. Kompozit gövde yapımı 6
27- Vakum pompası çalışır vaziyette 5-6 saat bekletilir.
28- 6 saat sonunda gövde çıkartılır (Şekil 5.12).
Şekil 5.12. Kompozit gövde yapımı 7
29- Bu uygulamada oluşturulan gövdenin ağırlığı kurumadan ve trimlenmeden ölçülen
değere göre 282.5 gr dır (Şekil 5.13).
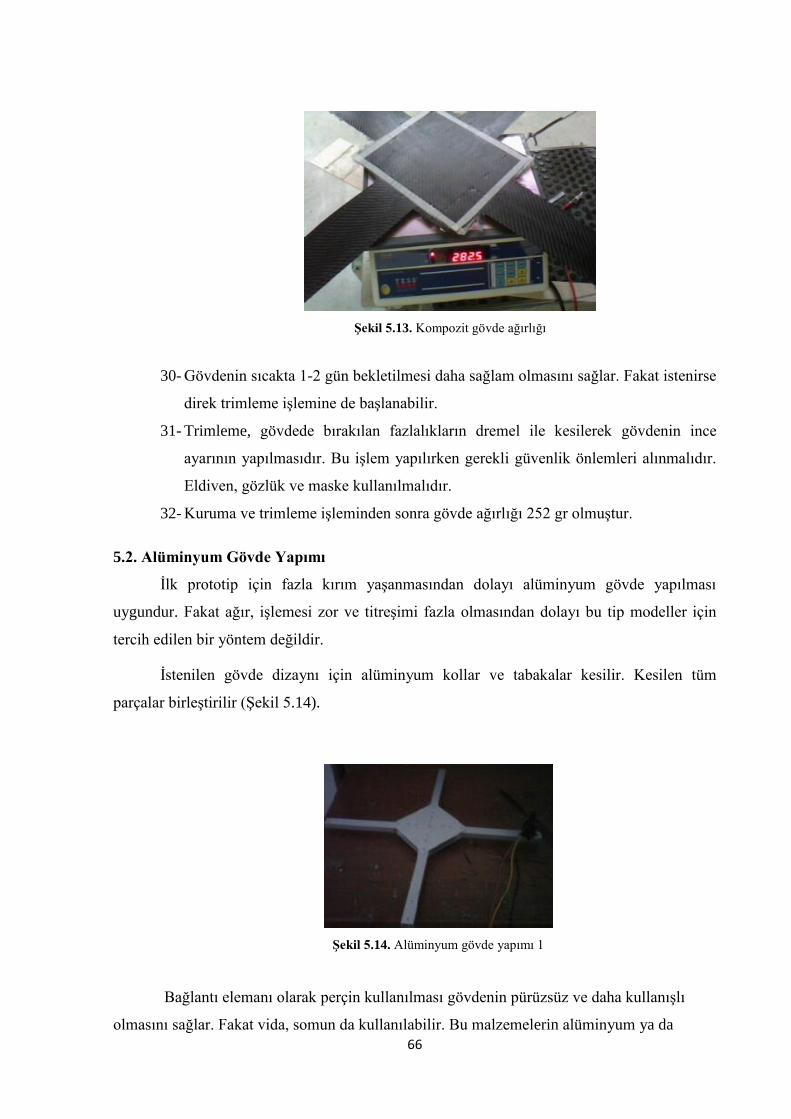
66
Şekil 5.13. Kompozit gövde ağırlığı
30- Gövdenin sıcakta 1-2 gün bekletilmesi daha sağlam olmasını sağlar. Fakat istenirse
direk trimleme işlemine de başlanabilir.
31- Trimleme, gövdede bırakılan fazlalıkların dremel ile kesilerek gövdenin ince
ayarının yapılmasıdır. Bu işlem yapılırken gerekli güvenlik önlemleri alınmalıdır.
Eldiven, gözlük ve maske kullanılmalıdır.
32- Kuruma ve trimleme işleminden sonra gövde ağırlığı 252 gr olmuştur.
5.2. Alüminyum Gövde Yapımı
İlk prototip için fazla kırım yaşanmasından dolayı alüminyum gövde yapılması
uygundur. Fakat ağır, işlemesi zor ve titreşimi fazla olmasından dolayı bu tip modeller için
tercih edilen bir yöntem değildir.
İstenilen gövde dizaynı için alüminyum kollar ve tabakalar kesilir. Kesilen tüm
parçalar birleştirilir (Şekil 5.14).
Şekil 5.14. Alüminyum gövde yapımı 1
Bağlantı elemanı olarak perçin kullanılması gövdenin pürüzsüz ve daha kullanışlı
olmasını sağlar. Fakat vida, somun da kullanılabilir. Bu malzemelerin alüminyum ya da

67
plastik malzeme olmasının dışında titreşimlere karşı gevşememesi ve mukavemetinin yüksek
olması gerekir. Her ihtimal göz önüne alınıp civata yapıştırıcısı (genellikle LOCTİTE diye
anılır) ile yapıştırılıp, titreşime karşı gevşeme önlenir. Gövdenin orta noktası yani elektronik
kısmın yerleştirildiği alan duruma göre çok katlı olmalıdır. Bunların birbirine montajı
yükseltme setleriyle yapılmalıdır. En altta pil kısmı 2. de ana kontrol sistemi ve alıcı ünitesi 3.
de ise kamera ve sensör sistemi yerleşimi 3 katlı bir model için örnek teşkil etmektedir (Şekil
5.15).
Şekil .15. 3 katlı plate dizaynı
Sensörler ölçüm yaptığı çeşide göre uygun yerlere takılacağından bunlar düşünülmeli
ve gövdede bunlara göre alanlar oluşturulmalıdır. Örneğin motor yanına konulacak ısı ve rpm
sensörleri için montaj yuvaları açılmalıdır.
Bazı sensörlerin nereye monte edileceği önemlidir. Örneğin GPS sensörü elektronik
cihazların mümkün olduğunca uzağına ve pervane ile arasında en az 10 cm kalacak şekilde
monte edilmelidir.
Gövde dizaynı yapılırken, gövde yapımında uçuşta hava aracının önünün belli olması
açısından farklı renkler kullanılmalıdır. Yani aracın önünü belli edecek işaretlemeler
yapılmalıdır.
5.3. Malzemelerin Gövdeye Montajı
1- ESC, kontrol kartı ve diğer elektronik eşyaların gövdeye takılacağı yerler tespit
edilip bağlantı şekline göre delikler açılır.
2- Motor ve ESC kablolarına gold konektörler lehimlenir.

68
3- Motor tutacaklarının motorlara montajı yapılır.
4- Motorlar gövdeye tutturulur. Motor tutacakları üzerine takılan motor, gövde yatay
eksenine dik olmalıdır. Motorun montajında kullanılan vidaların tork değerine dikkat
edilmeli, ne çok fazla ne de çok gevşek olmalıdır.
5-Vidaların titreşime karşı gevşememesi için gerekli önlem alınmalıdır, vida
yapıştırıcısı ya da kontra somun kullanılmalıdır.
6-ESC montajından önce ESC’ler programlanır. ESC programlama esnasında
pervaneler motorlara kesinlikle takılmamalıdır.
ESC’ler programlanırken ESC sinyal ucu ve diğer alıcıyı besleyen 2 uç, yani 3 ayaklı
servo kablosu, alıcının throttle kanalına bağlanır (genelde 3. kanaldır, kumandadan
bakılmalıdır). Kumanda açılır ve sonrasında ESC’ler pillere bağlı değilken verici gaz kolu en
yükseğe alınır, ESC’ler pile bağlanır. Bu esnada motordan ESC’lerin ayar moduna girdiğini
gösteren hemen hemen 2 sn. sonra 2 bip (beep beep) sesi duyulur, 5sn sonrasında özel bir ton
daha duyulur. Bu ESC’nin program moduna girdiğini gösterir. Sonrasında kısa ve uzun beep
sesleri ile menüler içerisinde gezinilerek istenen ayarlar yapılacaktır. İstenen menüye ait beep
sesi duyulduğunda gaz kolu minimuma getirilir ve o menüye ait alt menülere girilir. Daha
sonra alt menünün ayar sesleri gelecektir. Burada istenilen ayar sesi duyulduğunda gaz kolu
maksimuma getirilir. Ayarın yapıldığını belirten bir ton duyulur ve programlama işlemine
kalınan yerden beep sesleriyle devam edilir.
ESC lerde bazı ayarlamaların şu şekilde olması gerekir:
• Fren: kapalı
• Pil tipi: Ni-xx; Lipo pil kullanılmasına rağmen bu pilin seçilmesindeki temel sebep
mutikopterlerde birden fazla kullanılan motorun aniden çektiği fazla akımlara karşı
enerjiyi kesmesini engellemektir. Lipo pillerde hücre voltajı 3,7 iken nikel pillerde 1,2
V’tur.
• Timing: medium; Genelde bu ayar kullanılır. Fakat bu ayarlamalar yapıldıktan sonra
motordan ses gelirse bunun high ya da low yapılması uygun olur. Sesin kaybolduğu
ayar doğrudur.
• Start: normal
• Cut-off type: soft cut-off; Bu ayarın slow yapılma sebebi, ESC akımı keserken yavaş
kestiği için, kullanıcıya pilin bittiğini göstermesidir.
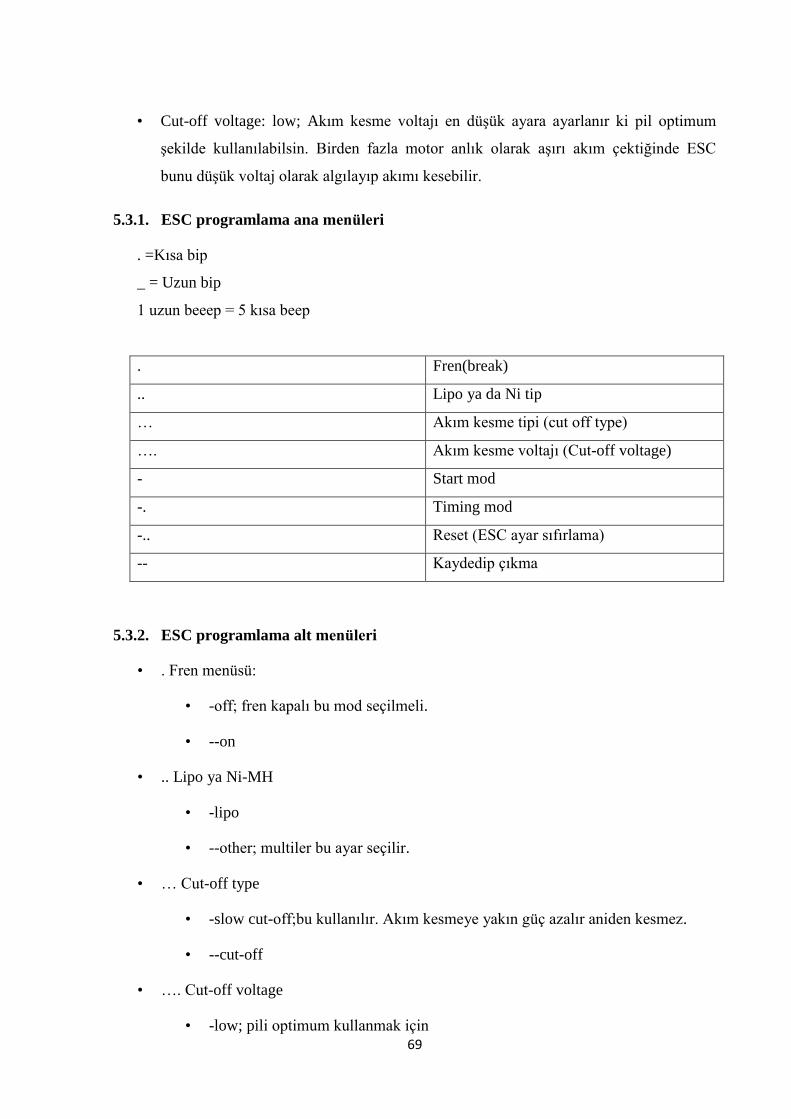
69
• Cut-off voltage: low; Akım kesme voltajı en düşük ayara ayarlanır ki pil optimum
şekilde kullanılabilsin. Birden fazla motor anlık olarak aşırı akım çektiğinde ESC
bunu düşük voltaj olarak algılayıp akımı kesebilir.
5.3.1. ESC programlama ana menüleri
. =Kısa bip
_ = Uzun bip
1 uzun beeep = 5 kısa beep
. Fren(break)
.. Lipo ya da Ni tip
… Akım kesme tipi (cut off type)
…. Akım kesme voltajı (Cut-off voltage)
- Start mod
-. Timing mod
-.. Reset (ESC ayar sıfırlama)
-- Kaydedip çıkma
5.3.2. ESC programlama alt menüleri
• . Fren menüsü:
• -off; fren kapalı bu mod seçilmeli.
• --on
• .. Lipo ya Ni-MH
• -lipo
• --other; multiler bu ayar seçilir.
• … Cut-off type
• -slow cut-off;bu kullanılır. Akım kesmeye yakın güç azalır aniden kesmez.
• --cut-off
• …. Cut-off voltage
• -low; pili optimum kullanmak için

70
• --middle
• ---high
• – Start up mod (multinin nasıl başlayacağını seçeriz)
• -normal;bu mod kullanılır
• --soft;motor yavaş yavaş hızlanır
• ---very soft
• -. Timing:Motor kutup zamanlama ayarı(belli bi mod yoktur genelde middle kullanılır
denenmeli).
• -low
• --middle
• ---high
• -.. RESET (ESC yi standart fabrika çıkış ayarlarına alır)
• – Quit saving changes ;ayarları kaydedip çıkmayı sağlar.
• Kullanılan ESC (EMAX 60 A) deki ayarlara göre değiştirilmesi gereken modlar
şunlardır:
DJI kontrol kartı için;
Batarya tipi Li-xx seçilmiştir. Bu değiştirilip Ni-xx seçilir [11].
Düşük voltaj koruması medium ayarlanmıştır, bu low yapılmalıdır [12].
Timing fonksiyonu için low timing ayarlanmıştır. Bu denenerek bulunmalıdır.
Ardupilot kontrol kartı için;
Düşük voltaj koruması medium ayarlanmıştır. Bu low yapılmalıdır.
Timing fonksiyonu için low timing ayarlanmıştır. Bu denenerek bulunmalıdır.
APM kontrol kartına özgü ESC programlama şu şekildedir:
• Pervaneler sökülür.
• Usb ve power kablolarının tamamı sökülür. Yani APM beslenmemelidir.
• Kumanda açılır ve gaz kolu maksimuma alınır.
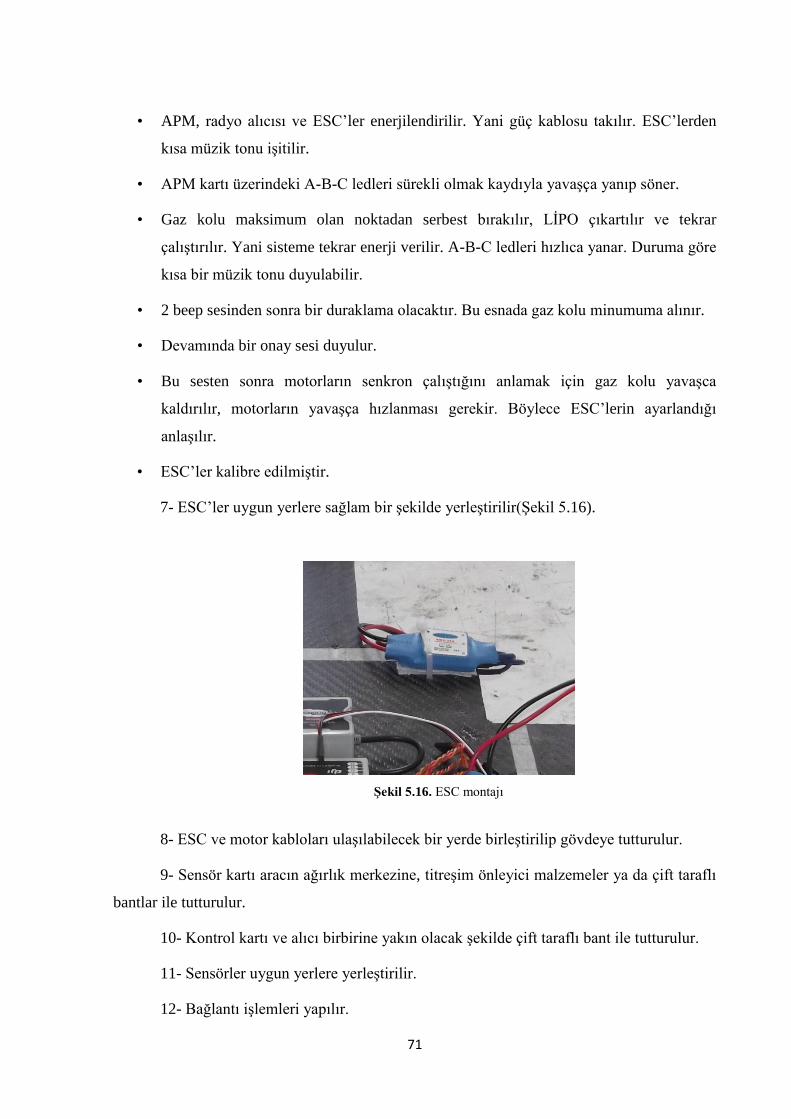
71
• APM, radyo alıcısı ve ESC’ler enerjilendirilir. Yani güç kablosu takılır. ESC’lerden
kısa müzik tonu işitilir.
• APM kartı üzerindeki A-B-C ledleri sürekli olmak kaydıyla yavaşça yanıp söner.
• Gaz kolu maksimum olan noktadan serbest bırakılır, LİPO çıkartılır ve tekrar
çalıştırılır. Yani sisteme tekrar enerji verilir. A-B-C ledleri hızlıca yanar. Duruma göre
kısa bir müzik tonu duyulabilir.
• 2 beep sesinden sonra bir duraklama olacaktır. Bu esnada gaz kolu minumuma alınır.
• Devamında bir onay sesi duyulur.
• Bu sesten sonra motorların senkron çalıştığını anlamak için gaz kolu yavaşca
kaldırılır, motorların yavaşça hızlanması gerekir. Böylece ESC’lerin ayarlandığı
anlaşılır.
• ESC’ler kalibre edilmiştir.
7- ESC’ler uygun yerlere sağlam bir şekilde yerleştirilir(Şekil 5.16).
Şekil 5.16. ESC montajı
8- ESC ve motor kabloları ulaşılabilecek bir yerde birleştirilip gövdeye tutturulur.
9- Sensör kartı aracın ağırlık merkezine, titreşim önleyici malzemeler ya da çift taraflı
bantlar ile tutturulur.
10- Kontrol kartı ve alıcı birbirine yakın olacak şekilde çift taraflı bant ile tutturulur.
11- Sensörler uygun yerlere yerleştirilir.
12- Bağlantı işlemleri yapılır.
72
13- Anlık veri iletimi için kullanılan xbee yukarda anlatılan şekilde Ardupilot kontrol
kartı üzerindeki sensör kartına (IMU) takılır.
ESC’ler gövdeye takılmadan önce 2 kablolu taraflar tüm ESC’lerde kırmızılar
kırmızılara (+) siyahlar siyahlara (-) olacak şekilde plaket üzerine konektör kullanılarak
lehimlenmeli ve ek olarak da bataryadan gelecek kablo uçları için konektör bırakılmalıdır.
Kırmızı uç, bataryanın artı, yani kırmızı ucuna; siyah uç, bataryanın eksi, yani siyah ucuna
bağlanır. Burada bataryadan verilecek akım değeri göz önüne alınmalı ve buna göre plaket
kullanılmalıdır (Şekil 5.17). Aksi taktirde plaket akımı çekemeyeceğinden yangına sebep
olabilir. Fırçasız motorlarda kullanılan ESC’lerde ESC’den çıkan üç ince kablonun iki tanesi
ESC’nin içindeki BEC (battery elimination circuit) devresinden gelen kontrol kartı besleme
kablosu, geri kalan beyaz sinyal kablosu ise ESC’ye kumandadan gönderilen sinyalleri ileten
kablodur.
Bu üç kablodan iki tanesi +5 ve -5 V çıkışıdır. Bunlar 5 V ile çalışan sistemler için
gerekli elektrik enerjisini kullanıcılara sağlamak amacıyla ESC’ye entegre edilmiştir. +5 V
olan kırmızı uç ortada olduğu için ters dahi bağlansa alıcıyı yakmaz Fakat sistem çalışmaz.
DJI’nın kontrol kartında buna ihtiyaç yoktur. Çünkü kendi güç dağıtım ünitesi regülatör
görevi görür.
Hitec Aurora 9 kumandasının alıcısı 35 V’a kadar çalışır. Eğer bu sistem
kullanılacaksa ESC 5 V çıkışları kesilebilir.
Diğer beyaz renkli kablo ise uygulanan gaz kanalı kumandasına göre motorun dönüş
hızını ayarlamaya yarayan sinyal kablosudur ve kontrol kartına bağlanır. Yani ESC’ nin
görevi olan motor hız kontrolünü, ESC bu kablodan gelen sinyal ile yapar.
ESC’nin diğer tarafında bulunan üç kablo ise motora gidecek olan motor beslemesi
yapan kablolardır. Bu kabloların herhangi iki tanesinin yerleri değiştirilerek ihtiyaç duyulursa
motor yönü değiştirilir.
14- Pervaneler motor dönüş yönlerine göre takılmalıdır.
15- Lipo pilin ağırlık merkezini bozmayacak şekilde gövdeye montajı yapılır.
16- İlk enerji verildiğinde xbee nin koordinatör olarak kullanılan modülü bilgisayara
bağlanıp, Mission Planer programından haberleşme yapılır. Baud rate hızının 57600 yapılması
unutulmamalıdır.

73
Şekil 5.17 Güç dağıtım plaketi
5.4. İlk Çalıştırma İşlemi
Her kontrol kartının kendine özgü çalışma prensibi vardır. Bu yüzden motorlar
çalıştırılmadan önce kullanılan uçuş kontrol kartına göre gerekli kalibrasyon ayarları
yapılmalıdır. Ardupilot kontrol kartı için gerekli kalibrasyon ayarları APM başlığı altında
anlatılmıştır.
5.4.1. APM için ilk çalıştırma işlemi
1- Gaz kolu minimum kısma alınır ve kumanda açılır. Batarya bağlantısı yapılır. Özel
bir ton duyulur. Bu batarya voltajının normal olduğunu gösterir. Sonunda uzunca bir beep sesi
duyulur. Bu uçuşa hazır olduğunu belirtir. Eğer hızlı bir şekilde beeep-beep-beep sesi
duyulursa (her beep arası 0,25 sn) bu gaz kolunun minimumda olmadığını gösterir. Sesler
arasındaki zaman 2 sn ise gaz sinyali normal değildir. Eğer beep sesi çok hızlı bir şekilde
duyulursa bu batarya voltajının aşırı yüksek ya da düşük olduğunu gösterir.
2- Motor gaz kolu en alt ve en sağ (sağ dip) tarafa çekilir.
3- APM üzerinde A-B-C ledleri seri bir şekilde yanıp söner ve ardından tüm ledler 1-2
sn söner.
4- Gaz kolu serbest bırakılır ve A-B-C ledlerinin sönmesi ile gaz kolu artırıldığında
motorlar çalışmaya başlar.
5.4.2. WKM için ilk çalıştırma işlemi
WKM kontrol kartı ilk çalıştırılma durumunda, kalibrasyon ve konfigürasyon
ayarlarının yapılması gerekir.

74
5.4.2.1. WKM kumanda kalibrasyonu
Kumanda kalibrasyonu, kumanda kontrol stiklerinin sınırlarını WKM kontrol kartına
tanıtmak için yapılır. Kontrol kartı bu stiklerin limitlerine göre ESC’ lere kontrol sinyali
gönderir. Kumanda kalibrasyonu şu şekilde yapılır (Şekil 5.18):
MC usb kablosu vasıtası ile bilgisayara bağlanır.
Assistant programı açılır.
Programın sağ kenarında bulunan “Tx Cali” linki seçilir.
Açılan sayfada, alıcı seçim kısmı, cut off type seçeneği ve stik hareketlerini gösterecek
sliderlar vardır.
Kullanılan alıcının tipine göre ilk alanda seçim yapılır. Hitec ve Futaba kumandalar
için bu alan “Tradition” seçilir.
İkinci alan ESC’ lerin akımı hangi durumlarda keseceğini belirler. Intelligient denilen
mod akımı her uçuş modu için farklı şartlar yerine geldiğinde keser. Manuel mod için
WKM kontrol kartını çalıştıran kumanda kombinasyonlarından biri yapıldığında
motorlar durur. Atti veya GPS Atti modunda ise şu şartlarda motorlar durur:
Motorlar uygun kumanda kobinasyonları ile çalıştırıldıktan sonra 3 sn
içerisinde gaz kolu yukarı itilmez ise,
Kumanda kombinasyonları yapılarak inişten 3 sn sonra ve gaz kolu
%10’ un altına çekilerek,
Hava aracının yatayla yaptığı açının 70 dereceyi aşıp gaz kolunun %10’
un altında olması ile motorlar durur.
Immediately modda motorlar gaz kolunun %10’ un altına çekilmesi ile durur.
Stik hareketlerinin sunulduğu sliderların bulunduğu kısım kumanda kalibrasyonunun
yapıldığı kısımdır.
“START” linkine tıklanır.
Kumanda kontrol stikleri sırası ile en üst, orta ve alt limitlerine çekilir, sliderlardan bu
hareketler gözlenir. Gözlenen hareketler hareket yönü tersinde ise sliderların sağ
tarafında bulunan kısımdan “REV” linkine tıklanarak hareket yönü değiştirilir.
Tüm kontrol stikleri aynı anda daire oluşturacak şekilde hareket ettirilir ve bu
hareketler ekrandan gözlemlenir.
Diğer kanallara atanan tuşların testi yapılır.
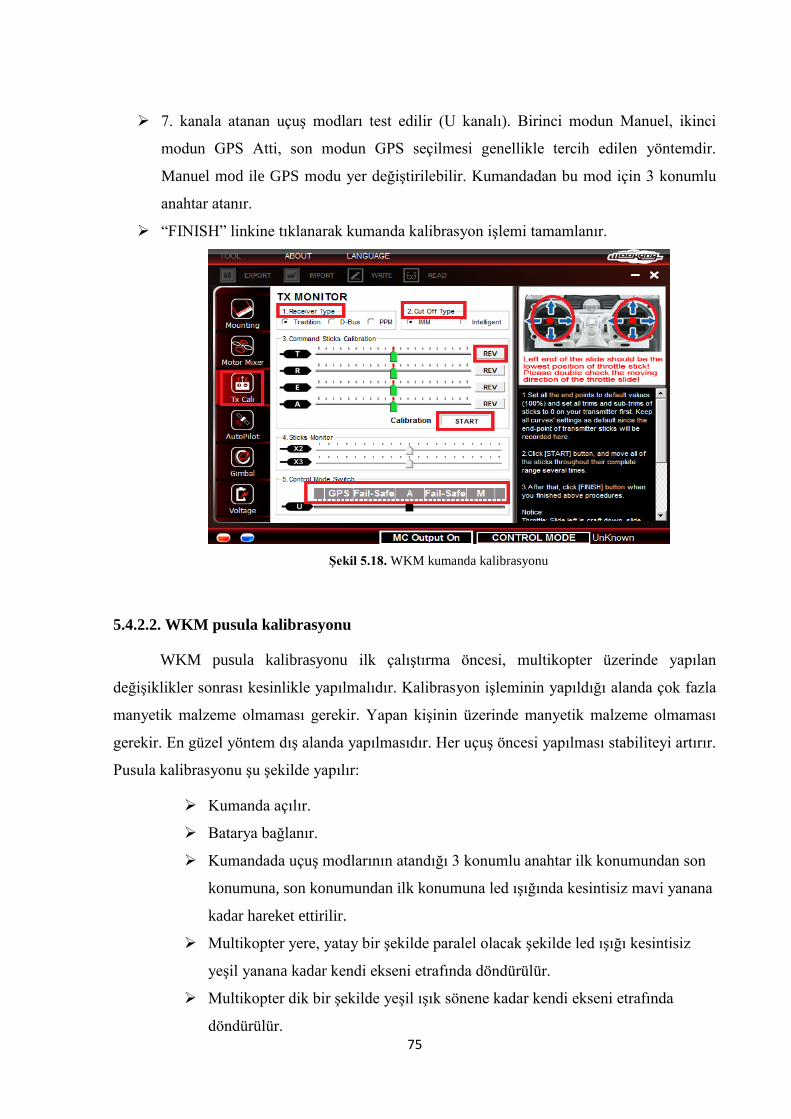
75
7. kanala atanan uçuş modları test edilir (U kanalı). Birinci modun Manuel, ikinci
modun GPS Atti, son modun GPS seçilmesi genellikle tercih edilen yöntemdir.
Manuel mod ile GPS modu yer değiştirilebilir. Kumandadan bu mod için 3 konumlu
anahtar atanır.
“FINISH” linkine tıklanarak kumanda kalibrasyon işlemi tamamlanır.
Şekil 5.18. WKM kumanda kalibrasyonu
5.4.2.2. WKM pusula kalibrasyonu
WKM pusula kalibrasyonu ilk çalıştırma öncesi, multikopter üzerinde yapılan
değişiklikler sonrası kesinlikle yapılmalıdır. Kalibrasyon işleminin yapıldığı alanda çok fazla
manyetik malzeme olmaması gerekir. Yapan kişinin üzerinde manyetik malzeme olmaması
gerekir. En güzel yöntem dış alanda yapılmasıdır. Her uçuş öncesi yapılması stabiliteyi artırır.
Pusula kalibrasyonu şu şekilde yapılır:
Kumanda açılır.
Batarya bağlanır.
Kumandada uçuş modlarının atandığı 3 konumlu anahtar ilk konumundan son
konumuna, son konumundan ilk konumuna led ışığında kesintisiz mavi yanana
kadar hareket ettirilir.
Multikopter yere, yatay bir şekilde paralel olacak şekilde led ışığı kesintisiz
yeşil yanana kadar kendi ekseni etrafında döndürülür.
Multikopter dik bir şekilde yeşil ışık sönene kadar kendi ekseni etrafında
döndürülür.
76
Beyaz ışık 3sn kesintisiz yanmış ise kalibrasyon işlemi başarılıdır.
Kırmızı ışık yanıp sönmesi ayarın başarısız olduğu anlamına gelir. Kalibrasyon
tekrar yapılmalıdır. Sürekli bu problemle karşılaşılması etraftaki manyetik
alanın güçlü olmasıdır.
Kalibrasyon ayarlarının yapılması ile ilk çalıştırma işlemi şu şekilde yapılır:
1- Gaz kolu minumum kısma alınır, kumanda açılır.
2- Batarya bağlantısı yapılır.
3- Kumanda üzerinde bulunan iki hareketli kol (joystick) en dip sağa ya da en dip sola
aynı anda çekilip tutulur (Farklı kumanda kombinasyonları da bulunmaktadır).
4- Motorların yavaşça çalıştığı görülür.
5- Hareketli kollar serbest bırakılır ve 3 sn içerisinde gaz kolu yavaşça artırılarak
motor devri değiştirilir.
6- Eğer 3 sn içerisinde gaz kolu kaldırılmazsa motorlar durur. Aynı işlemlerin tekrar
yapılması gerekir.
5.5. Failsafe Ayarı
Fail safe hava araçlarında uçuş esnasında verici sinyalinin alıcıya ulaşmadığı durumlarda
motorların enerjisini kesmeyen yani kırımın önüne geçen bir sistemdir. Tabi bunun
kullanılabilmesi için kontrol kartının da buna uygun donanımlara sahip olması gerekir.
Failsafe modunun APM kontrol kartı için kumandadan ayarlanması şu şekildedir:
• Önce verici ardından alıcı açılır ve kumanda edebilecek süreye kadar beklenilir.
• Alıcı function butonu 6 sn basılı tutulur ve bırakılır. 2 sn sonra kırmızı ve mavi ledler
hızlıca yanıp söner.
• Bu işlemden hemen sonra alıcı 5 sn sayar. Bu süre içerisinde tüm verici stickleri ve
kontrolleri (motor idle genelde %50, kontrol yüzeyleri vb.) fail safe için istenen
konuma getirilir ve bu konumlarda tutulur.
• 5 sn sonra sistem tüm bu Failsafe pozisyonlarını kaydettikten sonra stickler serbest
bırakılır.
• Alıcı ve verici kapatılır.
• Alıcı ve verici açılır. Sistem aktif hale gelir yani kullanıma hazır halde olur.

77
Sistemin testi ise şu şekildedir: Stick pozisyonları failsafe için ayarlanan pozisyonların
dışında pozisyonlara ayarlanır. Verici kapatılır, bekleme süresi denilen süre geçtikten sonra
(1sn) servolar failsafe için öngörülen pozisyonlarda hareketlerine devam ederler. Bu işlemler
gerçekleşmişse failsafe çalışıyor demektir.
Bu testin her uçuş öncesi yapılması gerekir.

78
6. FPV (FIRST PERSON VIEW) SİSTEMLERİ
FPV sistemleri hava aracından istenilen yere kablosuz olarak anlık görüntü iletimi için
kullanılmaktadır. Yapılan quadrokopterin sisli havada ya da gözle görülemeyecek
mesafelerde uçabilmesi için genellikle bu sistem kullanılmaktadır. Aslında uçuş esnasında bir
nevi göz olarak FPV sistemleri gibi anlık görüntü ileten sistemler kullanılır. Sadece görerek
uçuş sağlama amacı ile kullanılmayan bu sistem havadan görüntüleme, haritalama, resimleme
çalışmalarında, yerde konumlanan nesne tespitinde kullanılmaktadır. FPV sistemini oluşturan
parçalar şu şekildedir:
Kamera
Verici
Alıcı
LCD ekran, bilgisayar veya video gözlüğü şeklindedir.
Temel olarak bu malzemeler ile görüntü aktarım işlemi gerçekleştirilir.
Anlık sensör veri iletiminde olduğu gibi bu sistemde de RF (radyo frekansı)
haberleşme ile görüntü verileri aktarılır. Görüntünün xbee ile aktarılmama sebebi xbee’ nin
düşük güçlü olmasıdır. Bu sebepten ek bir sisteme ihtiyaç duyulur.
Görüntü aktarımında kullanılan frekans değeri oldukça önemlidir. Öncelikle
quadrokopterin diğer sistemlerinde kullanılan frekans bandlarının kullanılmaması ve
görüntünün ne amaçla aktarılacağı tespit edilmelidir. Yüksek frekanslarda mesafe kısalmakta
fakat daha fazla ve kaliteli veri gönderilebilmektedir. Düşük frekanslarda ise mesafenin
artması yanında daha az ve kalitesiz veri aktarımı gibi dezavantaj vardır. İlk dikkate alınması
gereken frekans seçimidir. Uygulaması yapılan quadrokopterlerde görüntü aktarımı için 5.8
GHz frekans bandı seçilmiştir.
Görüntünün çekilebilmesi için gerekli olan kameranın HD olması kaliteyi artırırken
yayında kesilmelere sebep olabilir. Fakat HD kameradan alınan görüntü kaliteli olacaktır.
Kamera seçiminde unutulmaması gereken bir diğer hususta kameranın yatay tarama hızı diye
tabir edilen değerdir. Bu değer ne kadar yüksekse o kadar net görüntü çekilir. HD kamera
yerine piyasada bulunan basit kameralarda kullanılabilir fakat tarama hızına dikkat etmek
gerekir. Ek olarak kameranın görüş açısını artırmak ya da azaltmak için lensler de
kullanılmaktadır. Bu lensler piyasada genellikle Fxx mm ölçülerinde satılmaktadır ve görüş
açısı xx değerine bağlıdır. Bu değer ne kadar büyükse görüş açısı da o kadar daralır. Bu da
yapılacak göreve uygun seçilmelidir.
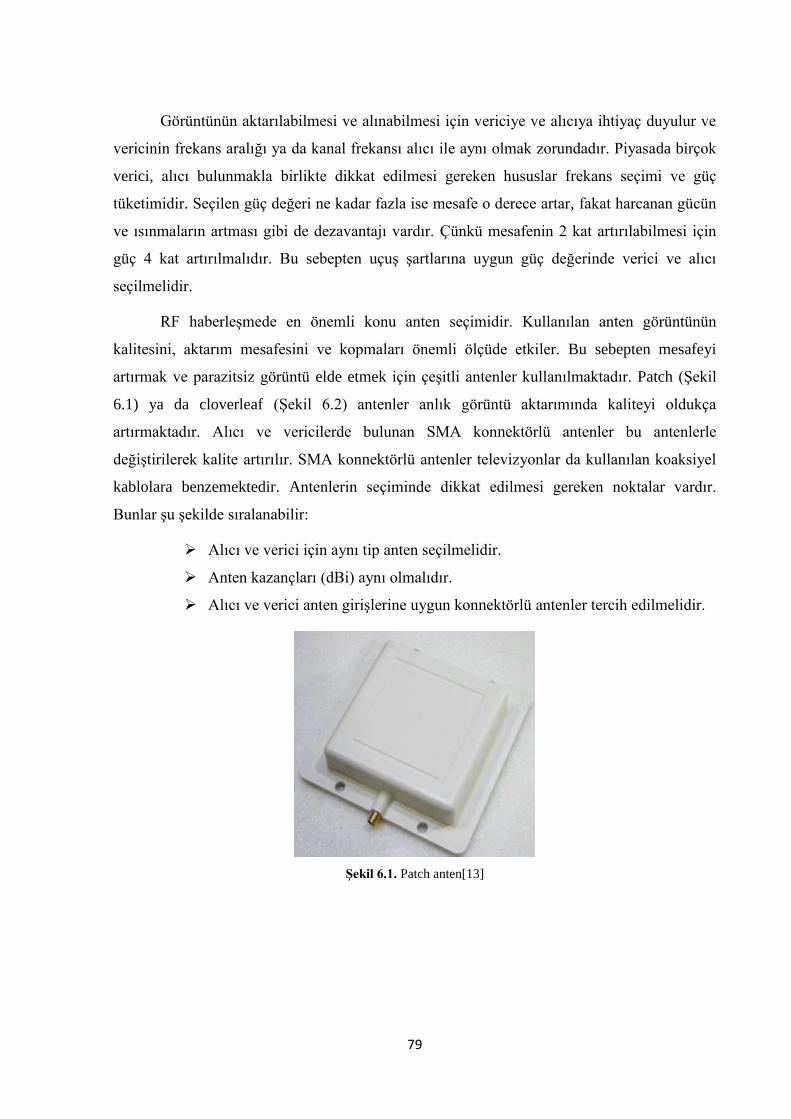
79
Görüntünün aktarılabilmesi ve alınabilmesi için vericiye ve alıcıya ihtiyaç duyulur ve
vericinin frekans aralığı ya da kanal frekansı alıcı ile aynı olmak zorundadır. Piyasada birçok
verici, alıcı bulunmakla birlikte dikkat edilmesi gereken hususlar frekans seçimi ve güç
tüketimidir. Seçilen güç değeri ne kadar fazla ise mesafe o derece artar, fakat harcanan gücün
ve ısınmaların artması gibi de dezavantajı vardır. Çünkü mesafenin 2 kat artırılabilmesi için
güç 4 kat artırılmalıdır. Bu sebepten uçuş şartlarına uygun güç değerinde verici ve alıcı
seçilmelidir.
RF haberleşmede en önemli konu anten seçimidir. Kullanılan anten görüntünün
kalitesini, aktarım mesafesini ve kopmaları önemli ölçüde etkiler. Bu sebepten mesafeyi
artırmak ve parazitsiz görüntü elde etmek için çeşitli antenler kullanılmaktadır. Patch (Şekil
6.1) ya da cloverleaf (Şekil 6.2) antenler anlık görüntü aktarımında kaliteyi oldukça
artırmaktadır. Alıcı ve vericilerde bulunan SMA konnektörlü antenler bu antenlerle
değiştirilerek kalite artırılır. SMA konnektörlü antenler televizyonlar da kullanılan koaksiyel
kablolara benzemektedir. Antenlerin seçiminde dikkat edilmesi gereken noktalar vardır.
Bunlar şu şekilde sıralanabilir:
Alıcı ve verici için aynı tip anten seçilmelidir.
Anten kazançları (dBi) aynı olmalıdır.
Alıcı ve verici anten girişlerine uygun konnektörlü antenler tercih edilmelidir.
Şekil 6.1. Patch anten[13]

80
Şekil 6.2. Cloverleaf anten[14]
Vericiden gönderilen veriler video girişli bir ekrandan, gözlükten ya da bilgisayardan
izlenebilir. Görüntünün bilgisayara aktarılması ve kaydedilmesi için alıcı ve bilgisayar
arasında video yakalayıcı (video capture) diye tabir edilen bir cihaz kullanılır (Şekil 6.3). Bu
cihaz sayesinde görüntü anlık olarak bilgisayardan izlenebilirken aynı zamanda kayıt da
edilebilir.
Şekil 6.3. Video yakalama cihazı ve alıcı

81
Şekil 6.4 te 5.8 GHz 100 mW alıcı verici ve kamera bağlantısı görülmektedir. Hemen
hemen tüm sistemlerin bağlantı şekli bu şekildedir. Verici beslemesi 7-12 V arası bir değerde,
alıcı beslemesi 8-12 V arası olmalıdır. Alıcı ısınmaya karşı bir soğutucu ile korunmalıdır.
Şekil 6.4. FPV sistemi bağlantısı

82
7. SONUÇ
İnsansız Hava Araçlarının özellikle savunma alanında kullanımı gün geçtikçe
artmaktadır. İHA’lar içerisinde çalışma alanı diğer modellere göre daha fazla olan
quadrokopterler geleceğin İHA’ları olarak değerlendirilmekteler. Qudrokopterler 4 rotora
sahip döner kanatlı dikey iniş kalkış yapabilen 6 serbestlik dereceli İHA olarak tanımlanır.
Quadrokopterlerde kullanılan donanımın fazla olması, kontrol yapısının karmaşık ve
yazılım odaklı olması quadrokopterler üzerine yapılan akademik çalışmaları ve mühendislik
uygulamalarını gün geçtikçe artırmaktadır.
Basit bir quadrokopterde kullanılacak ana malzemeler çalışma boyunca açıklandığı
gibi fırçasız motorlar, elektronik hız kontrolcüleri, pervane, uçuş kontrol kartı ve bataryadır.
Veri iletimi için kullanılacak sistemler ilettiği veri tiplerine göre radyo frekans haberleşmesi
ya da uydu haberleşmesi yaparlar. Anlık görüntü iletimi için kullanılan alıcı, verici ve kamera
sisteminin özellikleri çalışma boyunca açıklanmış hangi tür malzemelerin kullanılması
gerektiği belirtilmiştir.

83
KAYNAKÇA
[1] http://tr.wikipedia.org/wiki/İnsansız_hava_aracı
[2] Amerika Birleşik Devletleri Hava Kuvvetleri
[3] Quadrocopter incorporated into ROS (Robot Operating System) Pierce, Brennand
[4] Enerji Enstütisi
[5] Orta Doğu Teknik Üniversitesi Robot Topluluğu
[6, 9, 11, 12] Türkiye Multikopter Portalı, Tatarhan, Taner
[7] http://www.hobbyrc.com, Ceyhan, Onur
[8] Ardocopter Wiki Manuals
[10] http://www.polerfiber.com/images/kataloglar/3eb2331a-4.pdf
[13] http://www.readymaderc.com
[14] http://rcexplorer.se



















