
Performance-Based Analytics-Driven Seismic Design of Steel ...
252
UCLA UCLA Electronic Theses and Dissertations Title Performance-Based Analytics-Driven Seismic Design of Steel Moment Frame Buildings Permalink https://escholarship.org/uc/item/5bd6r600 Author GUAN, XINGQUAN Publication Date 2021 Peer reviewed|Thesis/dissertation eScholarship.org Powered by the California Digital Library University of California
-
Upload
khangminh22 -
Category
Documents
-
view
2 -
download
0
Transcript of Performance-Based Analytics-Driven Seismic Design of Steel ...

UCLAUCLA Electronic Theses and Dissertations
TitlePerformance-Based Analytics-Driven Seismic Design of Steel Moment Frame Buildings
Permalinkhttps://escholarship.org/uc/item/5bd6r600
AuthorGUAN, XINGQUAN
Publication Date2021 Peer reviewed|Thesis/dissertation
eScholarship.org Powered by the California Digital LibraryUniversity of California

UNIVERSITY OF CALIFORNIA
Los Angeles
Performance-Based Analytics-Driven Seismic Design of Steel Moment Frame Buildings
A dissertation submitted in partial satisfaction
of the requirements for the degree
Doctor of Philosophy in Civil Engineering
by
Xingquan Guan
2021

© Copyright by
Xingquan Guan
2021

ii
ABSTRACT OF THE DISSERTATION
Performance-Based Analytics-Driven Seismic Design of Steel Moment Frame Buildings
by
Xingquan Guan
Doctoral of Philosophy in Civil Engineering
University of California, Los Angeles, 2021
Professor Henry Burton, Chair
With the embrace of the performance-based seismic design as the state-of-the-art design
method, recent emphasis has been placed on eliminating its drawbacks and facilitating its
application in practice. This study aims to propose an alternative design method: performance-
based analytics-driven seismic design, which is applied to steel moment resisting frame buildings.
First, the seismic performance of self-centering (with post-tensioned connections) and
conventional moment resisting frames (with reduced-beam section connection) is comparatively
assessed. The comparison indicates that the economic benefit for adopting the post-tensioned
connection is not significant. Then, an end-to-end computational platform, which automates the
seismic design, nonlinear structural model construction, and response simulation (static and
dynamic) of steel moment resisting frames is developed. Using this platform, a comprehensive
database is developed, which includes 621 special steel moment resisting frames designed in

iii
accordance with modern codes and standards and their corresponding nonlinear structural models
and seismic responses (i.e., peak story drifts, peak floor accelerations, and residual story drifts).
Using this database, the efficacy of mechanics-based, data-driven, and hybrid (combination of
mechanics-based and data driven) approaches to estimating the seismic drift demand are evaluated.
The evaluation results reveal that the hybrid approach has the best performance whereas the
mechanics-based model has the lowest performance. Next, a set of non-parametric and parametric
surrogate models are developed for estimating the engineering demand parameter distributions. A
comparative assessment of the proposed surrogate models and the simplified analysis method
proposed by FEMA P-58 is conducted to demonstrate the superior predictive performance of the
former. Finally, the effect of various design variables on the collapse performance of steel moment
resisting frames are evaluated. The research findings presented in this study helps to facilitate the
application of 2nd performance-based earthquake engineering framework in practice and thus better
help to create earthquake-resilient communities.

iv
The dissertation of Xingquan Guan is approved.
Ertugrul Taciroglu
Jingyi Li
John Wallace
Thomas Sabol
Henry Burton, Committee Chair
University of California, Los Angeles
2021

v
To my mom
For her unconditional love, unwavering support, valuable encourage,
and selfless dedication.

vi
Table of Contents
1. Introduction ................................................................................................................................. 1
1.1 Motivation and Background ............................................................................................... 1
1.2 Objectives ........................................................................................................................... 3
1.3 Organization and Outline .................................................................................................... 4
2. Nonlinear Modeling and Analysis Methodology of Steel Moment Resisting Frames ............... 9
2.1 Introduction ......................................................................................................................... 9
2.2 Modeling for Beam and Column Components ................................................................. 13
2.3 Modeling for Panel Zones ................................................................................................. 16
2.4 Modeling for Gravity Induced P-Δ Effect ........................................................................ 17
3. Python-Based Computational Platform to Automate Seismic Design, Nonlinear Structural
Model Construction and Analysis of Steel Moment Resisting Frames ........................................ 20
3.1 Introduction ....................................................................................................................... 20
3.2 Seismic Design of SMRFs ................................................................................................ 25
3.2.1 Overview of Design Criteria .................................................................................... 25
3.2.2 Nonlinear Modeling of SMRFs ............................................................................... 27
3.3 Seismic Design Module .................................................................................................... 27
3.3.1 Overview .................................................................................................................. 27
3.3.2 Preprocessing the Electronic Database of Wide Flange Sections ............................ 28
3.3.3 Design Automation Algorithms ............................................................................... 29
3.3.4 Object-Oriented Programming Structure ................................................................. 37
3.4 Nonlinear Model Construction and Analysis Module ...................................................... 38
3.5 Illustrative Examples ........................................................................................................ 40
3.5.1 Seismic Design......................................................................................................... 40
3.5.2 Efficiency in Time Needed to Complete Design ..................................................... 43
3.5.3 Verification of the Seismic Design Module............................................................. 44
3.5.4 Comparing Features of AutoSDA with Commercial Software: RAM Steel and SAP
2000............................................................................................................................................... 49
3.5.5 Nonlinear Static and Dynamic Analysis of SMRF Buildings ................................. 50
vii
3.6 Adaptability of the AutoSDA Platform and Possible Future Extensions ......................... 52
3.7 Summary ........................................................................................................................... 54
4. A Database of Seismic Design, Nonlinear Models, and Seismic Responses for SMRF
Buildings ....................................................................................................................................... 56
4.1 Introduction ....................................................................................................................... 56
4.2 Database of SMRF Designs, Nonlinear Models, and Seismic Responses ........................ 58
4.2.1 Design Tool for Generating the Database ................................................................ 59
4.2.2 Seismic Designs for Archetype SMRFs .................................................................. 61
4.2.3 Ready-to-Run Nonlinear Structural Models ............................................................ 71
4.2.4 Earthquake Ground Motions .................................................................................... 71
4.2.5 Nonlinear Responses of SMRFs .............................................................................. 76
4.3 Structure of the Data ......................................................................................................... 81
4.4 Summary and Possible Future Extensions ........................................................................ 83
5. Comparative Study for Steel Moment Resisting Frames Using Post-Tensioned and Reduced-
Beam Section Connections ........................................................................................................... 87
5.1 Introduction ....................................................................................................................... 87
5.2 Model Development in OpenSees .................................................................................... 90
5.2.1 Description of Prototype Building ........................................................................... 90
5.2.2 Component-Level Modeling .................................................................................... 92
5.2.3 Structural Modeling ............................................................................................... 100
5.3 Nonlinear Static and Dynamic Analyses ........................................................................ 103
5.3.1 Nonlinear Static Response ..................................................................................... 103
5.3.2 Incremental Dynamic Analysis and Collapse and Demolition Fragility Curves ... 104
5.3.3 Discussion on Comparison between SC-MRF and WMRF .................................. 106
5.4 Economic Loss Assessment ............................................................................................ 107
5.4.1 Overview of FEMA P-58 Methodology ................................................................ 107
5.4.2 Description of Building Components .................................................................... 110
5.4.3 Expected Loss Conditioned on Seismic Intensity .................................................. 112
5.4.4 Expected Annual Loss ........................................................................................... 113
5.5 Summary ......................................................................................................................... 114

viii
6. Seismic Drift Demand Estimation for SMRF Buildings: from Mechanics-Based to Data-
Driven Models ............................................................................................................................ 116
6.1 Introduction ..................................................................................................................... 116
6.2 Overview of Existing Simplified Methods for Estimating Seismic Drift Demands ....... 121
6.2.1 Shear and Flexural Beam Theory .......................................................................... 122
6.2.2 Elastoplastic Single-Degree-of-Freedom with Known Yield Strength (PSKY).... 123
6.2.3 Statistically Adjusted Spectral Displacement ........................................................ 124
6.2.4 Statistically Adjusted Response of a Linear Elastic MDOF with Known Yield
Strength (EMKY)........................................................................................................................ 125
6.3 Generalized Framework for Developing Hybrid and/or Data-Driven Models for Estimating
Building Structural Response Demands under Extreme Loading .............................................. 126
6.3.1 Overview of Framework ........................................................................................ 126
6.3.2 Model Evaluation and Performance Metrics ......................................................... 128
6.4 New ML-Based Hybrid and Data-Driven Models to Estimate Seismic Drift Demands 132
6.4.1 Dataset of SMRF Seismic Responses .................................................................... 132
6.4.2 Overview of Model Development ......................................................................... 133
6.4.3 ML-based Purely Data-Driven (MLDD) Models .................................................. 136
6.4.4 ML-based EMKY Model (ML-EMKY) ................................................................ 144
6.5 Comparative Assessment Among Existing and Newly Developed Models ................... 146
6.5.1 Evaluating the MLDD and “Reduced-Order” MLDD Models .............................. 146
6.5.2 Evaluating the ML-EMKY Model ......................................................................... 149
6.5.3 Evaluating the PSKY Model .................................................................................. 150
6.5.4 Evaluating the Statistically Adjusted EMKY Model ............................................. 151
6.5.5 Comparing the Predictive Performance and Required User-Effort Among Different
Models......................................................................................................................................... 152
6.6 Summary ......................................................................................................................... 155
7. Surrogate Models for Probabilistic Distribution of Engineering Demand Parameters of SMRF
Buildings under Earthquakes ...................................................................................................... 158
7.1 Introduction ..................................................................................................................... 158
7.2 Dataset of SMRFs ........................................................................................................... 160
7.3 Surrogate Model for Probabilistic Distribution of EDPs ................................................ 167

ix
7.3.1 Performance Metrics for Model Evaluation .......................................................... 168
7.3.2 Parametric Surrogate Model .................................................................................. 169
7.3.3 Non-parametric Surrogate Model .......................................................................... 174
7.3.4 Comparative Assessment Among Existing and Newly Developed Surrogate Models
..................................................................................................................................................... 181
7.3.5 Estimation of Covariance Matrix ........................................................................... 183
7.4 Economic Loss Assessment using EDPs from the Surrogate Model and NRHAs ......... 185
7.4.1 Overview of Economic Loss Assessment Methodology ....................................... 185
7.4.2 Description of Building Components .................................................................... 187
7.4.3 Expected Economic Loss Comparison .................................................................. 188
7.5 Summary ......................................................................................................................... 189
8. Effect of Different Design Variables on Seismic Collapse Performance of Steel Special
Moment Frames .......................................................................................................................... 191
8.1 Overview ......................................................................................................................... 191
8.2 Collapse Safety Assessment Framework ........................................................................ 191
8.3 Implementation of the Framework to Los Angeles Metropolitan Area .......................... 193
8.3.1 Gathering the Design Provisions for the SMRF .................................................... 193
8.3.2 Developing the Archetype Designs ....................................................................... 193
8.3.3 Nonlinear Model Development.............................................................................. 198
8.3.4 Characterize the Uncertainty.................................................................................. 199
8.3.5 Quantify the Margin of Safety Against Collapse ................................................... 200
8.3.6 Performance Evaluation ......................................................................................... 202
8.4 Summary ......................................................................................................................... 207
9. Summary, Conclusions and Future Research Needs .............................................................. 208
9.1 Overview ......................................................................................................................... 208
9.2 Findings and Conclusions ............................................................................................... 209
9.2.1 Chapter 2 Nonlinear Modeling and Analysis Methodology of Steel Moment Resisting
Frames ......................................................................................................................................... 209
9.2.2 Chapter 3 Python-Based Computational Platform to Automate Seismic Design,
Nonlinear Structural Model Construction and Analysis of Steel Moment Resisting Frames .... 209
9.2.3 Chapter 4 A Database of Seismic Design, Nonlinear Models, and Seismic Responses

x
for SMRF Buildings .................................................................................................................... 211
9.2.4 Chapter 5 Comparative Study for Steel Moment Resisting Frames Using Post-
Tensioned and Reduced-Beam Section Connections ................................................................. 211
9.2.5 Chapter 6 Seismic Drift Demand Estimation for SMRF Buildings: from Mechanics-
Based to Data-Driven Models ..................................................................................................... 212
9.2.6 Chapter 7 Surrogate Models for Probabilistic Distribution of Engineering Demand
Parameters of SMRF Buildings under Earthquakes ................................................................... 214
9.2.7 Chapter 8 Effect of Different Design Variables on Seismic Collapse Performance of
Steel Special Moment Frames .................................................................................................... 215
9.3 Limitations and Future Work .......................................................................................... 215
10. Reference .............................................................................................................................. 218

xi
List of Figures
Figure 1.1 Overview of the performance-based seismic design method .................................. 2
Figure 1.2 Overview of performance-based analytics-driven seismic design .......................... 3
Figure 2.1 Possible plastic behavior in SMRFs: (a) Schematic view of possible plasticity in a
beam-column connection, (b) beam yielding, (c) column yielding, and (d) shear yielding in panel
zones ............................................................................................................................................. 10
Figure 2.2 Different types of structural component models: (a) concentrated plasticity model,
(b) finite length plastic hinge model, (c) distributed plasticity model (e.g., elements with fiber
sections), and (d) continuum finite element model (adapted from Deierlein et al. [9]) ............... 10
Figure 2.3 Modified IMK material model: (a) monotonic backbone curve and (b) cyclic
response......................................................................................................................................... 14
Figure 2.4 Gravity tributary area for the (a) SMRF and (b) gravity system ........................... 18
Figure 2.5 Nonlinear model for the SMRF: (a) overview of the model, (b) beam-column
connection and (c) leaning column joint ....................................................................................... 19
Figure 3.1 Overview of the main AutoSDA platform modules .............................................. 23
Figure 3.2 Overview of the seismic design module ................................................................ 28
Figure 3.3 Overview of sub-algorithm used to achieve the desired target drift demand ........ 31
Figure 3.4 Overview of sub-algorithm used to check the feasibility of beams, columns and
connections ................................................................................................................................... 32
Figure 3.5 Overview of the sub-algorithm used to ensure that the design requirements for all
beam-column connections are satisfied ........................................................................................ 35
Figure 3.6 Overview of the sub-algorithm used to revise the beam sizes for ease of construction
....................................................................................................................................................... 36
Figure 3.7 Programing structure of the seismic design module.............................................. 39
Figure 3.8 Programming structure of the NMCA module ...................................................... 40
Figure 3.9 Building case used to illustrate the AutoSDA design process: (a) floor plan and (b)
elevation of SMRF ........................................................................................................................ 41
Figure 3.10 Changes in member sizes at different design stages: (a) initial sizes, (b) member
sizes after first optimization for drift requirement, (c) most economical sections satisfying drift
requirement, (d) section sizes after checking requirements for beams and columns, (e) design after

xii
checking strong-column-weak-beam criterion, (f) code-conforming design, (g) member sizes after
adjusting beams for ease of construction, and (h) final design ..................................................... 43
Figure 3.11 Three-story building used in the ATC 123 project [48]: (a) floor plan and (b)
elevation view ............................................................................................................................... 46
Figure 3.12 Nine-story building used in the ATC 123 project [48]: (a) floor plan and (b)
elevation view ............................................................................................................................... 46
Figure 3.13 Comparing design story drifts for the Englekirk and AutoSDA designs: (a) three-
story and (b) nine-story buildings ................................................................................................. 47
Figure 3.14 Four-story office building reported by Lignos [23] ............................................ 48
Figure 3.15 Monotonic pushover curve for the three-story building ...................................... 51
Figure 3.16 Collapse fragility for the three-story building ..................................................... 52
Figure 4.1 Overview of the database ...................................................................................... 59
Figure 4.2 Overview of AutoSDA modules ........................................................................... 60
Figure 4.3 ASCE 7-16 DBE and MCE spectra at the considered site .................................... 63
Figure 4.4 Typical structural framing plan layout for archetype buildings: (a) one-bay, (b)
three-bay, and (c) five-bay SMRFs as the LFRS .......................................................................... 63
Figure 4.5 Visualizing the designs for the 81 one-story SMRFs: (a) moment of inertia for
beams, (b) moment of inertia for exterior columns, (c) moment of inertia for interior columns, and
(d) design story drifts .................................................................................................................... 65
Figure 4.6 Visualizing the designs for the 162 five-story SMRFs: (a) moment of inertia for
beams, (b) moment of inertia for exterior columns, (c) moment of inertia for interior columns, and
(d) design story drifts. ................................................................................................................... 66
Figure 4.7 Visualizing the designs for the 162 nine-story SMRFs: (a) moment of inertia for
beams, (b) moment of inertia for exterior columns, (c) moment of inertia for interior columns, and
(d) design story drifts. ................................................................................................................... 67
Figure 4.8 Visualizing the designs for the 128 fourteen-story SMRFs: (a) moment of inertia
for beams, (b) moment of inertia for exterior columns, (c) moment of inertia for interior columns,
and (d) design story drifts ............................................................................................................. 68
Figure 4.9 Visualizing the designs for the 88 nineteen-story SMRFs: (a) moment of inertia for
beams, (b) moment of inertia for exterior columns, (c) moment of inertia for interior columns, and
(d) design story drifts .................................................................................................................... 70

xiii
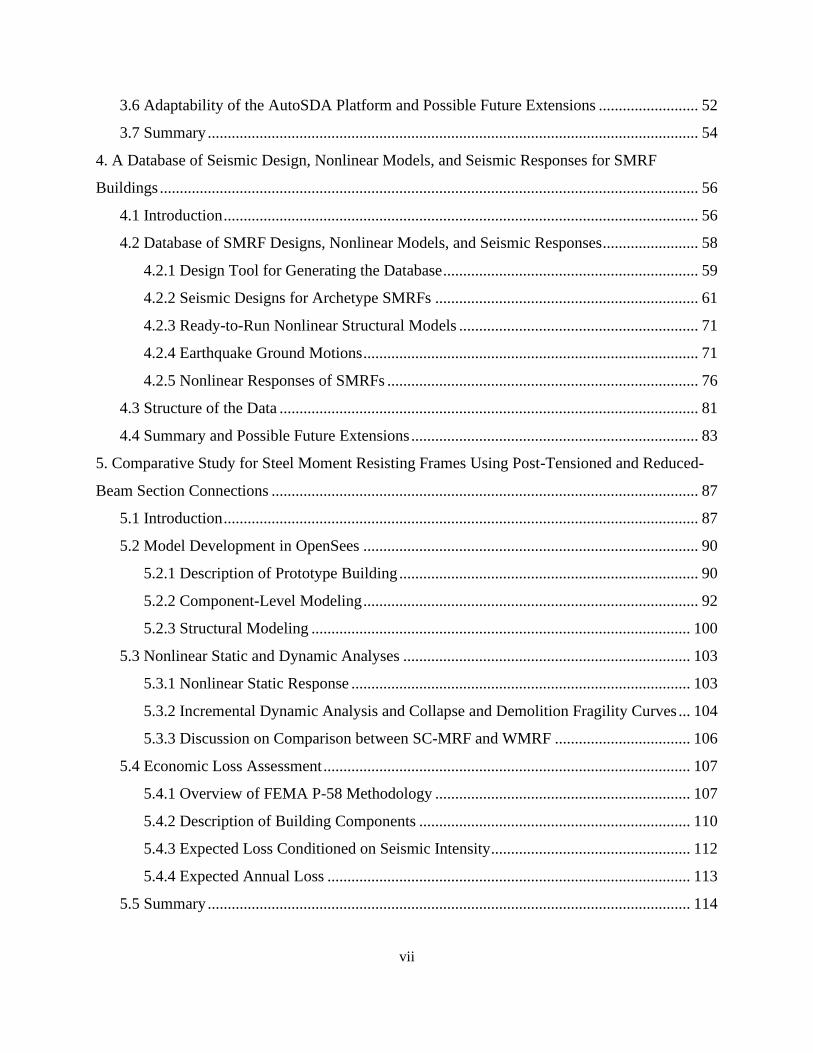
Figure 4.10 Distribution of drift concentration factors for all 621 SMRFs: (a) boxplots for
buildings with different number of stories and (b) histogram of drift concentration factors ....... 71
Figure 4.11 Acceleration spectra for the 240 ground motion records .................................... 72
Figure 4.12 Ground motion response spectra at the SLE hazard level for the following
representative periods: (a) 0.5 sec, (b) 1.0 sec, and (c) 2.0 sec..................................................... 74
Figure 4.13 Ground motion response spectra at the DBE hazard level for the following
representative periods: (a) 0.5 sec, (b) 1.0 sec, and (c) 2.0 sec..................................................... 75
Figure 4.14 Ground motion response spectra at the MCE hazard level for the following
representative periods: (a) 0.5 sec, (b) 1.0 sec, and (c) 2.0 secs ................................................... 76
Figure 4.15 Structural responses for a typical one-story building subjected to 40 MCE level
ground motions: (a) peak story drift, (b) peak floor acceleration, and (c) residual story drift profiles
....................................................................................................................................................... 77
Figure 4.16 Structural responses for a typical five-story building subjected to 40 MCE level
ground motions: (a) peak story drift, (b) peak floor acceleration, and (c) residual story drift profiles
....................................................................................................................................................... 78
Figure 4.17 Structural responses for a typical nine-story building subjected to 40 MCE-level
ground motions: (a) peak story drift, (b) peak floor acceleration, and (c) residual story drift profiles
....................................................................................................................................................... 79
Figure 4.18 Structural responses for a typical fourteen-story building subjected to 40 MCE
level ground motions: (a) peak story drift, (b) peak floor acceleration, and (c) residual story drift
profiles .......................................................................................................................................... 80
Figure 4.19 Structural responses for a typical nineteen-story building subjected to 40 MCE
level ground motions: (a) peak story drift, (b) peak floor acceleration, and (c) residual story drift
profiles .......................................................................................................................................... 81
Figure 5.1 Schematic illustration of an (a) RBS welded connection and (b) PT connection . 88
Figure 5.2 Overview of study ................................................................................................. 90
Figure 5.3 Prototype building including (a) floor plan and (b) elevation of moment resisting
frame (adapted from Garlock et al. [89]). ..................................................................................... 91
Figure 5.4 Model for an exterior PT connection with top-and-seat angles and associated
column and beam .......................................................................................................................... 94

xiv
Figure 5.5 Schematic force-deformation response for (a) Self-centering and (b) Pinching4
material parameters ....................................................................................................................... 94
Figure 5.6 Experiment setup (adapted from Ricles et al. [80]) ............................................... 96
Figure 5.7 Comparison between the proposed model and experimental data for specimens (a)
PC2, (b) PC3, (c) PC4, and (d) 20s-18. ........................................................................................ 96
Figure 5.8 Calibration of PT connection model subjected to (a) monotonic and (b) cyclic
loading........................................................................................................................................... 98
Figure 5.9 A typical comparison of the backbone curve for three types of connections ...... 100
Figure 5.10 OpenSees model for the SC-MRF: (a) overview of the model, (b) details for SC-
MRF connection, and (c) details for leaning column joint ......................................................... 102
Figure 5.11 Monotonic pushover curves for the SC-MRF and WMRF ............................... 104
Figure 5.12 Fragility results: (a) collapse and (b) demolition fragility curves ..................... 106
Figure 5.13 Seismic hazard curve corresponding to the site of interest ............................... 110
Figure 5.14 Expected loss for the building with SC-MRFs .................................................. 112
Figure 5.15 Comparison of expected loss for WMRF and SC-MRF buildings including (a) total,
(b) collapse, (c) demolition, and (d) repair losses ....................................................................... 113
Figure 5.16 Comparison of annual expected loss between (a) SC-MRF and (b) WMRF
buildings ...................................................................................................................................... 114
Figure 6.1 Overview of the performance-based seismic design procedure .......................... 117
Figure 6.2 Overview of study ............................................................................................... 121
Figure 6.3 Framework for developing hybrid/data-driven models to estimate seismic demands
..................................................................................................................................................... 128
Figure 6.4 Trend line obtained from linear regression on the observed and predicted values: (a)
large dispersion and (b) small dispersion cases .......................................................................... 131
Figure 6.5 Initial set of predictor variables considered for the data-driven and hybrid models
..................................................................................................................................................... 136
Figure 6.6 Workflow for developing the MLDD model....................................................... 137
Figure 6.7 A schematic view of a decision tree model: (a) sample space split into five regions
considering two predictors 𝑋1 and 𝑋2, and (b) the corresponding decision tree model ............ 137
Figure 6.8 A schematic illustration of the random forest algorithm with three trees for an 𝑁-
data sample with 𝑝 features ........................................................................................................ 138

xv
Figure 6.9 Training and validation results for low-to-mid-rise buildings: (a) Observed versus
predicted story drift demand on the training and validation datasets, and (b) the distribution of
relative difference between the observed and predicted drift demand for the validation dataset 139
Figure 6.10 Training and validation results for high-rise buildings: (a) Observed versus
predicted story drift demand on the training and validation datasets, and (b) the distribution of
relative difference between the observed and predicted drift demands for the validation dataset
..................................................................................................................................................... 139
Figure 6.11 Normalized importance scores of the 35 predictors for the low-to-mid-rise
buildings: (a) building information, (b) modal information, (c) spectral parameters, and (d)
nonlinear static analysis parameters............................................................................................ 141
Figure 6.12 Normalized importance scores of the 35 predictors for the high-rise buildings: (a)
building information, (b) modal information, (c) spectral parameters, and (d) nonlinear static
analysis parameters ..................................................................................................................... 143
Figure 6.13 Workflow for developing the ML-EMKY model ............................................. 144
Figure 6.14 Workflow involved in applying the ML-EMKY, MLDD and Reduced Order
MLDD models ............................................................................................................................ 146
Figure 6.15 Predictive performance evaluation for the MLDD model applied to the low-to-
mid-rise buildings: (a) NRHA-based versus model predicted story drift demands and (b) the
distribution of relative difference between NRHA-based and model predicted story drifts ...... 147
Figure 6.16 Predictive performance evaluation for the MLDD model applied to the high-rise
buildings: (a) NRHA-based versus model predicted story drift demands and (b) the distribution of
relative difference between NRHA-based and model predicted story drifts .............................. 147
Figure 6.17 A spectrum of models for simplified seismic drift demand estimation............. 153
Figure 6.18 Comparing the performance based on 𝐷10% across the existing and newly
developed models for the (a) low-to-mid-rise and (b) high-rise buildings ................................. 154
Figure 6.19 Performance versus required effort for various seismic drift demand estimation
models ......................................................................................................................................... 155
Figure 7.1 Overview of the dataset ....................................................................................... 162
Figure 7.2 The distributions of building geometries and gravity loads in the database: (a)
number of stories, (b) bay widths, (c) first/typical story height ratios, (d) number of bays, (e) typical
floor dead loads, and (f) roof dead loads .................................................................................... 163

xvi
Figure 7.3 The Distribution of building periods ................................................................... 164
Figure 7.4 The distribution of spectral acceleration evaluated at the first-mode period ...... 164
Figure 7.5 A schematic plot for fitting the peak story drift with lognormal distribution ..... 165
Figure 7.6 Training and validation results for median peak story drift of: (a) low-to-mid-rise
buildings and (b) high-rise buildings. ......................................................................................... 171
Figure 7.7 The distribution of relative difference between the observed and predicted median
peak story drift for the validation dataset: (a) low-to-mid-rise buildings and (b) high-rise buildings
..................................................................................................................................................... 172
Figure 7.8 A schematic view of a decision tree model: (a) Two-feature sample space split into
to three subspaces and (b) the corresponding decision tree model ............................................. 175
Figure 7.9 A schematic illustration of the random forest algorithm with three trees for an 𝑁-
data sample with 𝑝 features ........................................................................................................ 176
Figure 7.10 Training and validation results for median peak story drift of (a) low-to-mid-rise
buildings and (b) high-rise buildings .......................................................................................... 177
Figure 7.11 The distribution of relative difference between the observed and predicted median
peak story drift for the validation dataset: (a) low-to-mid-rise buildings and (b) high-rise buildings
..................................................................................................................................................... 177
Figure 7.12 Normalized importance scores of the 35 predictors for the low-to-mid-rise
buildings: (a) building information, (b) modal information, (c) spectral parameters, and (d)
nonlinear static analysis parameters............................................................................................ 179
Figure 7.13 Comparing the performance based on 𝐷25% across the existing and newly
developed models for: (a) peak story drift, (b) peak floor acceleration, and (c) residual story drift
..................................................................................................................................................... 182
Figure 7.14 A schematic view of the covariance matrix for the EDPs ................................. 184
Figure 7.15 The distribution of the covariance terms at MCE hazard level: (a) covariance terms
excluding the residual drift and (b) covariance terms relevant to residual drift ......................... 184
Figure 7.16 The distribution of the covariance terms at DBE hazard level: (a) covariance terms
excluding the residual drift and (b) covariance terms relevant to residual drift. ........................ 184
Figure 7.17 The distribution of the covariance terms at SLE hazard level: (a) covariance terms
excluding the residual drift and (b) covariance terms relevant to residual drift ......................... 185

xvii
Figure 7.18 Comparison of the economic loss based on the EDPs generated from the surrogate
model and NRHAs: (a) NRHA-based versus surrogate model-based economic loss and (b) the
distribution of the relative difference between the NRHA-based and surrogate model-based losses
..................................................................................................................................................... 189
Figure 7.19 Comparison of the economic loss based on the EDPs generated from the NRHAs
and surrogate models with the covariance observed from NRHAs: (a) NRHA-based versus
surrogate model-based economic loss and (b) the distribution of the relative difference between
the NRHA-based and surrogate model-based losses .................................................................. 189
Figure 8.1 Overview of FEMA P695 collapse performance assessment procedure ............. 193
Figure 8.2 The distribution of site parameters in Los Angeles metropolitan area: (a) 𝑆𝑀𝑆, (b)
𝑆𝑀1, (c) 𝑆𝐷𝑆, and (d) 𝑆𝐷1 ......................................................................................................... 194
Figure 8.3 The distribution of 𝑉𝑠30 in Los Angeles metropolitan area ............................... 195
Figure 8.4 Visualizing the design story drifts for the SMRFs designed using R = 8: (a) one-
story, (b) three-story, (c) five-story, (d) seven-story, and (e) nine-story buildings .................... 198
Figure 8.5 Distribution of drift concentration factors for all SMRFs: (a) boxplots for buildings
with different number of stories and (b) histogram of drift concentration factors ..................... 198
Figure 8.6 The histogram of ACMRs for (a) R = 8, (b) R = 9, and (c) R = 10 .................... 201
Figure 8.7 The distribution of ACMRs for buildings with different number of stories: (a) R =
8, (b) R = 9, and (c) R = 10 ......................................................................................................... 203
Figure 8.8 The distribution of ACMRs for buildings with different bay width: (a) R = 8, (b) R
= 9, and (c) R = 10 ...................................................................................................................... 204
Figure 8.9 The distribution of ACMRs for buildings with different number of bays: (a) R = 8,
(b) R = 9, and (c) R = 10 ............................................................................................................. 205
Figure 8.10 The distribution of ACMRs for buildings located in different seismicity region: (a)
R = 8, (b) R = 9, and (c) R = 10 .................................................................................................. 206
Figure 8.11 The distribution of ACMRs for buildings designed with different R factors ... 207

xviii
List of Tables
Table 2.1 Advantages and limitations of each model ............................................................. 11
Table 3.1 Design duration for buildings with different numbers of stories and bays ............. 44
Table 3.2 Comparing member sizes between designs produced by Englekirk and the AutoSDA
platform for the three-story building............................................................................................. 47
Table 3.3 Comparing member sizes between designs produced by Englekirk and the AutoSDA
platform for the nine-story building design .................................................................................. 47
Table 3.4 Comparing member sizes between designs produced by the AutoSDA platform and
Lignos [23] .................................................................................................................................... 49
Table 3.5 Comparing features of RAM Steel, SAP 2000, and the AutoSDA platform ........... 50
Table 4.1 Parameters considered in developing the SMRF archetypes and their associated
ranges ............................................................................................................................................ 61
Table 4.2 Overview of attributes and associated descriptions ................................................ 84
Table 5.1 Design of prototype frames (adapted from Garlock et al. [90]). ............................ 92
Table 5.2 Parameters of Self-centering material for four specimens ...................................... 97
Table 5.3 Parameters of Pinching4 material for four specimens ............................................ 97
Table 5.4 Parameters for Self-centering material of PT connections ...................................... 99
Table 5.5 Parameters for Pinching4 material of PT connections............................................ 99
Table 5.6 Comparison of natural periods for WMRF and SC-MRF (unit: second). ............ 102
Table 5.7 Damageable components ...................................................................................... 111
Table 6.1 Some existing approaches for predicting seismic drift demands .......................... 118
Table 6.2 Multi-Metric Performance Evaluation for the MLDD Model .............................. 148
Table 6.3 Multi-Metric Performance Evaluation for the Reduced-Order MLDD Model .... 149
Table 6.4 Multi-Metric Performance Evaluation for ML-EMKY ........................................ 150
Table 6.5 Multi-Metric Performance Evaluation for PSKY ................................................. 151
Table 6.6 Multi-Metric Performance Evaluation for the Statistically Adjusted EMKY Model
..................................................................................................................................................... 152
Table 7.1 Initial set of predictor variables considered for the surrogate model ................... 166
Table 7.2 Initial coefficients of linear regression for predicting the central tendency of peak
story drifts ................................................................................................................................... 170

xix
Table 7.3 Performance evaluation for the parametric model on validation dataset .............. 174
Table 7.4 Summary of the parameters for the random forest model .................................... 180
Table 7.5 Performance evaluation for the non-parametric model on validation dataset ...... 180
Table 7.6 The range and median for covariance terms. ........................................................ 185
Table 7.7 . Damageable components for a five-story five-bay building .............................. 187
Table 8.1 The distribution of site class in Los Angeles metropolitan area ........................... 195
Table 8.2 Six typical sites in Los Angeles metropolitan area ............................................... 195
Table 8.3 Parameters considered in developing the SMF archetypes and their associated ranges
..................................................................................................................................................... 196

xx
BIOGRAPHICAL SKETCH
Education:
2009–2013 B.Sc. in Civil Engineering
Huazhong University of Science and Technology
Wuhan, Hubei, China
2013–2016 M.Sc. in Structural Engineering
Huazhong University of Science and Technology
Wuhan, Hubei, China
2016–2020 M.Sc. in Earthquake Engineering
University of California, Los Angeles
Los Angeles, California, USA
2016–2021 Ph.D. candidate in Structural/Earthquake Engineering
University of California, Los Angeles
Los Angeles, California, USA
Selected Journal Publications:
Guan, X., Burton, H., Shokrabadi, M., & Yi, Z. (2021). Seismic drift demand estimation for
SMF buildings: from mechanistic to data-driven models. Journal of Structural Engineering.
DOI: 10.1061/(ASCE)ST.1943-541X.0003004. (Accepted for publication)
Guan, X., Burton, H., & Shokrabadi, M. (2020). A database of seismic designs, nonlinear
models, and seismic responses for steel moment resisting frame buildings. Earthquake Spectra.
8755293020971209.
Guan, X., Burton, H., & Sabol, T. (2020). Python-based computational platform to automate
seismic design, nonlinear structural model construction and analysis of steel moment resisting
frames. Engineering Structures, 224, 111199.
Guan, X., Burton, H., & Moradi, S. (2018). Seismic performance of a self-centering steel
moment frame building: from component-level modeling to economic loss assessment. Journal
of Constructional Steel Research, 150, 129-140.

1
1. Introduction
1.1 Motivation and Background
The second-generation performance-based seismic design (PBSD) framework [1] enables
structural engineers to target specific stakeholder-driven building performance objectives. As
shown in Figure 1.1, PBSD begins with defining a set of performance objectives using some metric
of interest (e.g., reliability, resilience, and/or lifecycle cost), followed by a preliminary design.
Ideally, the building performance should then be assessed by conducting nonlinear response
history analyses (NRHAs) on a structural model of the design and using the generated engineering
demand parameters (e.g., peak story drifts, peak floor accelerations, and residual story drifts) to
evaluate earthquake-induced impacts (e.g., physical damage, economic losses, the probable
number of fatalities, and functional recovery time). Based on the results of this initial assessment,
the design is revised as needed and the assessment is repeated until the performance meets the
predefined objectives.
While PBSD is commonly considered to be a state-of-the-art design method that can
effectively target specific performance outcomes, it has not been widely adopted in practice. This
is partly because the majority of engineers rely on elastic models to estimate seismic demands,
which is generally not suitable for rigorous performance-based assessments. Even when nonlinear
models are employed, the iterative process of conducting NRHAs and revisiting the design would
be computationally expensive and labor intensive.
To address the challenges resulting from the computational expense and high labor-costs
associated with PBSD, a new design methodology, performance-based analytics-driven (PBAD)
seismic design, is developed. An essential part in PBAD is the utilization of surrogate models,
which are necessary for establishing statistical relationships between the design variables (e.g., site

2
condition, building dimensions, and load magnitudes), structural response (e.g., lateral load-
carrying capacity and collapse resistance), and the various decision metrics (e.g., economic losses,
downtime, and fatality). The surrogate models remove the need for costly structural response
simulation (which is typically done in OpenSees [2] or other similar platforms) and loss assessment
(which could be done by computing tools, such as SP3 [3] or PACT [4]), which can significantly
reduce computational demand. On the other hand, recent advances in prediction-analytics using
machine learning techniques have created the opportunity for data-driven or hybrid (combination
of data-drive and mechanics-based) surrogate models to accurately replicate mechanics-based
(numerical models that explicitly simulate the phenomena under consideration) simulation results.
With the help of such surrogate models, various tasks such as design optimization, design space
exploration, and sensitivity analysis, become much more feasible [5]. The current study is focused
on the development of the PBAD methodology and application to steel moment resisting frame
buildings.
Figure 1.1 Overview of the performance-based seismic design method

3
Figure 1.2 Overview of performance-based analytics-driven seismic design
1.2 Objectives
The objective of the current study is to develop the performance-based analytics-driven
seismic design framework and apply it to steel moment resisting frames. The resulting body of
research combines seismic design automation, archetype design database development, extensive
nonlinear structural analyses, and rapid characterization for the probabilistic distribution of seismic
responses and impacts. More specifically, the main objectives are outlined below:
1. Create an “end-to-end” computational platform that iteratively integrates seismic design,
structural response simulation, impact (e.g., economic loss and downtime) assessment, and
performance criteria evaluation for steel moment resisting frame buildings.
2. Establish a database of archetype steel moment resisting frame buildings using
performance-based grouping methodology, which considers the importance/sensitivity of design
variables to overall structural performance.

4
3. Assess the seismic performance of the self-centering moment resisting frame using post-
tensioned connections and the conventional moment resisting frame using reduced-beam section
connections.
4. Conduct nonlinear response history analyses and performance-based impact (economic
loss, collapse safety, and downtime) assessments for the set of archetype buildings using high
performance computing techniques.
5. Investigate the efficacy of mechanics-based, data-driven, and hybrid approaches in
estimating the story drift demands in steel moment resisting frames.
6. Develop surrogate models that provide a compact statistical relationship between key
design variables and structural response (including peak story drifts, peak floor accelerations,
residual story drifts) as well as performance outcomes (e.g., economic loss, collapse safety, and
downtime).
7. Quantify the influence of various design variables on the collapse performance of steel
moment resisting frames based on a large number of archetype buildings located on various sites.
1.3 Organization and Outline
The main body of the current study consists of eight chapters. Four of them are adopted
from published journal manuscripts which are cited at the beginning of the chapter.
Chapter 2 provides an in-depth literature review that summarizes recent advances in
structural modeling of steel moment resisting frames. Different models, including concentrated
plasticity, finite length plastic hinge, distributed plasticity, and continuum finite-element models,
are critically examined to reveal their advantages and limitations.
Chapter 3 presents an end-to-end computational platform, which automates seismic design,
nonlinear structural model construction, and response simulation (static and dynamic) of steel

5
moment resisting frames. A modular framework is adopted along with the object-oriented
programming paradigm to ensure the adaptability of the platform. The seismic design module
iteratively generates code-conforming section sizes and detailing for beams, columns, and beam-
column connections based on the relevant input design variables including the building
configuration (e.g., the number of stories, the number of lateral-force resisting systems, and the
building dimensions), loads (e.g., dead and live loads on each floor), and site conditions (mapped
spectral acceleration parameters). The nonlinear model construction and analysis module takes the
design results as input and produces structural models that capture flexural strength and stiffness
deterioration in the frame beam-column elements, and performs pushover and response history
analyses. Illustrative examples are presented to demonstrate the reliability, accuracy, and
efficiency of the platform, which significantly reduces the time and effort involved in producing
iterative structural designs and conducting nonlinear analyses, both of which are necessary for
performance-based seismic design. Additionally, the platform can be used to create an extensive
database of archetype steel moment frame buildings towards the development of analytics-driven
design methods.
Chapter 4 introduces the development of a comprehensive database, which includes 621
special steel moment resisting frames designed in accordance with modern codes and standards
and their corresponding nonlinear structural models and seismic responses (i.e., peak story drifts,
peak floor accelerations, and residual story drifts). The seismic responses for a subgroup of 100
steel moment resisting frames subjected to three groups of site-specific ground motions (with 40
records each) at the service-level, design-based, and maximum considered earthquake levels, are
also included. The database could be used to evaluate the performance of existing methods and
develop data-driven and hybrid (combination of mechanics-based + data-driven) models for

6
estimating seismic structural drift demands. The database can also be utilized in the development
and implementation of a performance-based analytics-driven seismic design methodology.
Chapter 5 presents a seismic performance comparison between steel moment resisting
frames with post-tensioned (PT) connections and welded connections. Firstly, a phenomenological
model that captures lateral load response and collapse behavior of PT connections is developed
and then verified using previous experiments. A prototype building, which has self-centering
moment resisting frames (SC-MRFs) as its lateral force resisting system, is considered selected for
the analytical modeling. Then a two-dimensional OpenSees model of the SC-MRF is created using
the newly-developed phenomenological model. With the same member sizes, an OpenSees model
is also created for a welded moment resisting frame (WMRF) that has reduced beam section
connections. Nonlinear static and dynamic analyses are performed on both SC-MRF and WMRF
models. The lateral load-carrying capacity, collapse resistance, and demolition intensity of both
frames are compared. Finally, the economic losses of both frame buildings are assessed using
FEMA P-58 methodology [4]. It is worth noting that the model for the SC-MRF adopted in this
part of the study is constructed by slightly adapting the structural model generated from the
AutoSDA platform (as introduced in Chapter 3). This demonstrates that the platform has the
potential to be extended to simulate various steel moment frame systems.
Chapter 6 lays out a spectrum of simplified methods for estimating building seismic drift
demands is conceptualized. On one extreme are mechanics-based approaches that are derived
solely from fundamental engineering principles. On the other end are purely data-driven models
that are developed using parametric datasets generated from nonlinear response history analyses.
Between these two extremes, there are models that combine elements of basic engineering
principles and statistical learning (hybrid models). First, the benefits and drawbacks of four

7
existing simplified seismic response estimation methodologies that fall within this spectrum of
approaches are critically examined. Subsequently, a generalized framework for developing and
validating hybrid and/or purely data-driven seismic demand estimation models is proposed. Using
this framework, two new machine learning-based models are developed and rigorously evaluated.
Finally, a comparative assessment of the existing and newly developed models is conducted while
focusing on their predictive performance and the level of effort needed to implement them.
Chapter 7 is focused on developing a set of parametric and non-parametric surrogate
models for estimating the median engineering demand parameters (EDPs) (including peak story
drifts, peak floor accelerations, and residual story drifts). A comparative assessment of the
proposed surrogate models and the simplified analysis method proposed by FEMA P-58 is
conducted to demonstrate the superior predictive performance of the former. Additionally, the
covariance between different EDPs is quantitatively investigated. Finally, the EDPs generated
using the surrogate “median” model and the assumed covariance matrix are used to calculate the
economic loss for 100 steel moment frame buildings and further compared with those computed
using the NRHA-based EDPs. The comparison indicates that the simulated EDPs produce
reasonable estimates of the economic loss.
Chapter 8 evaluates the collapse performance of steel special moment frames by applying
the FEMA P695 methodology [6]. By using the AutoSDA platform (as described in Chapter 3),
archetype designs for 198 steel moment resisting frames with different number of stories, number
of bays, bay widths, R factors, and site parameters are developed. Nonlinear models are
constructed and analyzed using the 44 FEMA P695 ground motions to predict the collapse
resistance of each archetype design. The adjusted collapse margin ratios (ACMRs) of different
building groups are compared and checked against the acceptable threshold specified by FEMA

8
P695. The research work conducted in this chapter highlights the importance of the AutoSDA
platform in generating the archetype design space with a broad range of various design variables.
Chapter 9 summarizes the findings of the previous chapters and discusses the limitations
of the current study and opportunities to improve the methodologies and frameworks presented in
the previous chapters.

9
2. Nonlinear Modeling and Analysis Methodology of Steel Moment
Resisting Frames
2.1 Introduction
Both performance-based seismic design and performance-based analytics-driven seismic
design require reliable numerical models that are capable of capturing the full range of structural
response associated with various performance targets. In the development of such models, two
main aspects are necessary to be considered. First, the model must reflect the strength and stiffness
deterioration attributable to damage accumulation (e.g., column yielding, beam yielding, and panel
zone shear yielding in steel moment resisting frames (SMRFs), as shown in Figure 2.1) that could
lead to local or global collapse. Second, the models for structural components need to be reliable,
robust, and computationally efficient. Idealized beam and column models for nonlinear structural
analysis vary greatly in terms of complexity and computational expense from phenomenological
model, such as the concentrated plasticity model (Figure 2.2(a)), finite length plastic hinge model
(Figure 2.2(b)), and distributed plasticity model (Figure 2.2(c)), to complex continuum finite
element model (e.g., solid elements as shown in Figure 2.2(d)). The advantages and limitations of
these models illustrated in Figure 2.2 are summarized in Table 2.1.
Continuum finite element models are generally accepted as the most reliable approach for
estimating the seismic demands in structural systems. However, the modeling process is typically
complex as it requires a great number of input parameters, such as material properties, contact
algorithms, mesh definitions, and restrains. Another remarkable shortage of the continuum finite
element model is its high computational expense. Because of these two drawbacks, continuum
finite element models are less practical for structural system level modeling, but more feasible for
component-level modeling. This is the primary reason why most of the existing studies relying on

10
finite element models are focused on either the beam/column component (e.g., [7]) or joint
connection (e.g., [8]) and are rarely targeting on the entire structural system.
(a)
(b)
(d)
(c)
Figure 2.1 Possible plastic behavior in SMRFs: (a) Schematic view of possible plasticity in a
beam-column connection, (b) beam yielding, (c) column yielding, and (d) shear yielding in panel
zones
(a)
(b)
(c)
(d)
Figure 2.2 Different types of structural component models: (a) concentrated plasticity model, (b)
finite length plastic hinge model, (c) distributed plasticity model (e.g., elements with fiber
sections), and (d) continuum finite element model (adapted from Deierlein et al. [9])
The development of distributed plasticity (DP) models dates back to the research work
done by Bazant [10]. Initially, the DP models were stated in displacement format. Soon later, the
model presented in force (or flexibility) format was developed. Neuehofer and Filippou [11]
evaluated displacement-based and force-based elements, and stated that the latter is better than the
Panel zone
(Shear yielding)
Beam
(Flexural yielding)
Column
(Flexural & axial yielding)
Column
(Flexural & axial yielding)
Plastic hinge
Elastic portionElastic portion
Finite length
hinge
Fiber section Finite
element

11
former in terms of the computation efficiency and accuracy. The representative of distributed
plasticity models are the elements with fiber sections (Figure 2.2(c)), which discretize the section
into “small squares” (known as fiber) and each fiber was assigned with stress-strain relationship.
As a result, the element permits the spread of plasticity along the element length. On the other
hand, it can capture the P-M (axial force and moment) interaction. However, the elements with
fiber sections have some limitations. First, the simulation result generated from elements with fiber
sections tend to be mesh-sensitive, especially when softening constitutive relationship is used. This
type of mesh dependence due to softening has been thoroughly studied by many scholars [12–14].
Second, the strength and stiffness deterioration, both of which are essential for assessing the
collapse behavior of structures, cannot be captured by the elements with available engineering
stress-strain relationship. Last, the elements with fiber sections are computationally expensive for
tall buildings. These limitations prevent the wide application of DP models.
Table 2.1 Advantages and limitations of each model
Concentrated plasticity Finite length plastic hinge
model Fiber model
Continuum finite-
element model
Pros
Fairly simple;
Computationally
efficient;
Explicit hinge length;
Reduced nodes, elements
and DOFs
Plasticity spread;
P-M interaction; Most reliable;
Cons Require calibration;
Miss P-M interaction;
Not mature to be used in
dynamic analyses;
Mesh dependence;
Hard to capture
deterioration;
Complex modeling;
Time-consuming
computation;
The issues arisen from DP models led the development of finite length plastic hinge (FLPH)
model. This model is a combination of DP (as introduced in the previous paragraph) and
concentrated plasticity (CP) models (which will be elaborated in the following paragraph). A
FLPH model typically consists of one linear elastic portion with two discrete distributed plastic
hinges at its two ends, as shown in Figure 2.2(b). The model alleviates the localization issue which

12
is arisen in DP models through appropriate selection of plastic hinge length and definition of
integration scheme. The FLPH model has two advantages [15]. First, the plastic hinge is defined
with explicit length, which allows the recovery of meaningful local cross section results (e.g.,
curvatures and bending moments). Third, compared with the DP model, this model involves less
number of nodes, elements, and degree of freedoms, which drastically alleviate the computational
burden. Meanwhile, the model has one limitation. The constitutive relationship for the plastic
hinge is required to be calibrated based on moment-rotation curves obtained from the experimental
data, which might not be always available. Some recent studies [15,16] on FLPH models aims to
provide calibration approach, but none of them provide a solid evidence that the model could be
implemented in OpenSees [2] for the dynamic analysis. As a result, the FLPH model might not be
a good option for modeling SMRFs.
CP model was firstly developed in the 1960s [17,18] and has been adapted and used by
scholars to this day. The model typically consists of a linear elastic portion with two inelastic
hinges at both ends. The inelastic hinge is usually represented as a zero-length rotational spring
assigned with a certain constitutive relationship. The CP model is fairly simple in terms of
modeling process and is extremely computationally-efficient, both of which make the model
widely embraced by researchers. The flaws of the CP model are that it cannot capture the P-M
interaction and it requires a calibration for the plastic hinge property. The former flaw is an
inherent limitation which cannot be possibly overcome except switching to other models. The
latter flaw has been partially addressed as many scholars have developed explicit formula to
calibrate the plastic hinge. Some commonly-used constitutive relationships include Clough and
Johnston Model [17], Takeda Model [19], Ramberg-Osgood Model [20], Ibarra-Medina-
Krawinkler (IMK) deterioration model [21], and so forth. Because of its simplicity, the CP model

13
is widely embraced to simulate the nonlinear behavior of beam and column components in SMRFs.
2.2 Modeling for Beam and Column Components
Concentrated plastic hinge beam-column elements consist of a linear elastic portion with
inelastic hinges at both ends, which are typically represented as zero-length rotational springs. The
modified Ibarra-Medina-Krawinkler (IMK) material model is often used in nonlinear hinge
elements [21,22]. It has been developed and adapted over the years to simulate the hysteretic
behavior of beam-column connections while incorporating both cyclic and in-cycle degradation.
As shown in Figure 2.3, its monotonic response envelope includes three segments: elastic,
hardening, and post-capping. The entire monotonic backbone curve is defined by three strength
parameters and three deformation parameters. The yield (My), capping (or peak moment) (Mc) and
residual moments (Mr) are the strength parameters. The deformation parameters include the yield
rotation (θy), rotation at peak moment (θc), and the rotation at which the strength degrades to zero
(θu). Three types of cyclic deterioration, including basic strength, post-capping strength, and
unloading stiffness, are incorporated by defining eight relevant parameters. While the material
model requires a total of 24 parameters, past studies [21,23–25] have provided empirical equations
and qualitative insights on how to determine each parameter (which are presented in the following
paragraphs). More specifically, the modeling parameters for the beam and column hinges are
determined using the empirical equations reported by Lignos and Krawinkler [24], and Lignos et
al. [25], respectively. The CP model is fairly simple to implement and is computationally efficient,
which is partly why it has been widely embraced. While the implemented version of the CP model
cannot capture P-M interaction, past studies have demonstrated that it is reliable enough to estimate
structural responses under earthquakes [23,24,26].

14
(a)
(b)
Figure 2.3 Modified IMK material model: (a) monotonic backbone curve and (b) cyclic response
The modified IMK model assumes that each component has a reference hysteretic energy
dissipation Et, which is independent on loading history applied to that component. The reference
energy dissipation is expressed as follows:
t p y yE M M= = (2.1)
Where p = is the reference cumulative rotation capacity and is an user specified
parameter. When it is set as zero, the deterioration is disabled.
The basic strength and post-capping deterioration are modeled by translating the two
strength bounds toward the origin at the rate of 1(1 )i i iM M −= − after every excursion i in which
energy is dissipated. The moment Mi is any reference strength value on each strength bound line
and βi is an energy-based deterioration parameter, as expressed as follows:
1
( )cii i
t j
j
E
E E
−
=
− (2.2)
Where Ei is hysteretic energy dissipated in excursion i, 1i
j
j
E−
is total energy dissipated in
past excursions, Et is reference energy dissipation capacity determined in the previous equation,
Mom
ent
Chord Rotation
Post-capping
Hardening
Elastic
Moment
Rotation
Mc
My
Mr = κ My
θp θpc
θy θc θu

15
and c is an empirical parameter and is usually set as 1.0.
Similarly, unloading stiffness deterioration is defined by the following equation:
1(1 )i i iK K −= − (2.3)
The empirical equations [24,25] used determine the modeling parameters are summarized
in Equations (2.4) to (2.12).
The pre-peak plastic rotation (θp) for beams with reduced-beam sections (RBS), other-than-
RBS beams, and columns are determined using Equation (2.4), (2.5), and (2.6), respectively.
210.314 0.100 0.185 0.113 0.760 0.0700.19 ( ) ( ) ( ) ( ) ( ) ( )
2 533 355
f unit yb unitp
w f y
b c FL c dh L
t t r d − − − − −
=
(2.4)
21
0.365 0.140 0.340 0.721 0.2300.0865 ( ) ( ) ( ) ( ) ( )2 533 355
f unit yunitp
w f
b c Fc dh L
t t d − − − −
=
(2.5)
0.7 1.61.7
294 1 0.20 radgb
p
w y ye
PLh
t r P
−−
= −
(2.6)
In the equations, h, tw, bf, tf, ry, and d are the section properties of steel wide-flange section.
L and Lb is are the component length and unbraced length, respectively. Pg/Pye is the gravity-
induced compressive load ratio. cunit1 and cunit
2 are coefficients for unit conversion and are both 1.0
if millimeters and megapascals are used. They are 25.4 and 6.895, respectively, if d is in inches
and Fy is in ksi.
The post-peak plastic deformation capacity (θpc) for beams with RBS, other-than-RBS
beams, and columns are given in Equations (2.7), (2.8), and (2.9), respectively.
21
0.513 0.863 0.108 0.3609.52 ( ) ( ) ( ) ( )2 533 355
f unit yunitpc
w f
b c Fc dh
t t − − − −
=
(2.7)
21
0.565 0.800 0.280 0.4305.63 ( ) ( ) ( ) ( )2 533 355
f unit yunitpc
w f
b c Fc dh
t t − − − −
=
(2.8)

16
0.8 2.50.8
90 1 0.30 radgb
pc
w y ye
PLh
t r P
−−
= −
(2.9)
The reference cumulative plastic rotation related parameter (Λ) that controls the
deterioration for beams with RBS and other-than-RBS beams are given in Equations (2.10) and
(2.11), respectively.
2
1.14 0.632 0.205 0.391585 ( ) ( ) ( ) ( )2 355
f unit yt b
y w f y
b c FE Lh
M t t r
− − − −
= =
(2.10)
2
1.34 0.595 0.360495 ( ) ( ) ( )2 355
f unit yt
y w f
b c FE h
M t t
− − −
= =
(2.11)
For beams, the values of basic strength, post-peak strength, and unloading stiffness
parameters (Λs, Λc, and Λk) could be estimated as 1.0 times the value of Λ.
For columns, the parameter that controls the cyclic basic strength deterioration (Λs) is given
by:
0.53 4.922.14
1.30 1.192.30
25000 1 3.0, if / 0.35
26800 1 3.0, if / 0.35
gbg ye
w y ye
s
gbg ye
w y ye
PLhP P
t r P
PLhP P
t r P
−−
−−
−
=
−
(2.12)
The post-peak strength and unloading stiffness deterioration parameters (Λc and Λk) could
be estimated as 0.9 times the value of Λs.
The qualitative and/or qualitative insights on the determination of other parameters
(including My, Mc/My, θu, and κ) could be found in the reference [24,25].
2.3 Modeling for Panel Zones
Apart from the beam and column components, the possible shear yielding at the panel
zones is also considered. Panel zone yielding usually initiates from the center towards the four

17
corners, which causes parallelogram-shaped deformations. The shear distortion relationship
developed by Krawinkler [27] is used to simulate this behavior. The governing parameters are
determined using the following equations:
(0.95 ) 0.553 3
y y
y eff c p y c p
F FV A d t F d t= = (2.13)
Where Vy is the panel zone shear yield strength, Fy is the yield strength of the steel material,
Aeff is the effective shear area, dc is the depth of the column, and tp is the thickness of the web
including doubler plates. The yield distortion (γy) is given as:
3
y
y
F
G =
(2.14)
Where G is the shear modulus of the column material.
The panel zone is modeled using a combination of elastic elements and zero length
rotational springs. More specifically, eight elastic elements with very high axial and flexural
rigidity are used as the boundary elements, which form a parallelogram with a width corresponding
to the column depth and a height that is the same as the beam depth. A trilinear rotational spring
is placed in one of the four corners to capture the shear distortion. The remaining three corners are
modeled as pinned connections. The thickness of the panel zone is taken as the sum of the column
web and doubler plate thicknesses. More modeling details for panel zones could be found in Gupta
and Krawinkler [28].
2.4 Modeling for Gravity Induced P-Δ Effect
A leaning column is included to account for the gravity-induced P-Δ effects. The leaning
column is connected to the frame through a truss element. The hinge for the leaning column is
modeled as a zero-length rotational spring with very small rotational stiffness so that it does not

18
add lateral stiffness to the structure. The gravity load on the SMRF (as shown in Figure 2.4(a)) is
uniformly applied to the beam elements, whereas the load on the part of the gravity system (as
shown in Figure 2.4(b)) that is not explicitly modeled is applied to the leaning column. The gravity
load applied to the model is calculated using the load combination of 1.05DL+0.25LL, where DL
is the nominal and superimposed dead loads and LL is the nominal live load. The floor mass is
uniformly assigned to each node at the same floor level. The floor mass is uniformly assigned to
each node at the same floor level. Two percent Rayleigh damping ratio (2%) is assigned at the first
and third mode of all nonlinear structural models following the approach reported by Zareian and
Medina [29].
(a)
(b)
Figure 2.4 Gravity tributary area for the (a) SMRF and (b) gravity system
A schematic illustration of a six-story, four-bay SMRF model is presented in Figure 2.5.
In summary, beams and columns are modeled using elastic beam-column elements. The plastic
hinges at the ends of beams and columns are modeled using zero-length rotational springs with
modified IMK material model. The panel zones in steel moment frames are modeled by adopting
the methodology presented in previous paragraph, as shown in Figure 2.5(b). A leaning column is
Gravity tributary area for the SMRF
SMRF
North
Gravity tributary area for the gravity system
Gravity system

19
required to account for P-Δ effects caused by the gravity and a truss element is used to connect the
leaning column to the steel moment frame, as shown in Figure 2.5(c).
(a)
(b)
(c)
Figure 2.5 Nonlinear model for the SMRF: (a) overview of the model, (b) beam-column
connection and (c) leaning column joint
Gravity
Leaning
column
Concentrated
load
Pinsupport
Panel zone.
See detailed
view in Figure
2.5(b)
See detailed
view in Figure
2.5(c)
Bottom
hingeFixedsupport
(3)
(1)
(2)
(3)(1)
(4)
(6)
(5)
(1)
(4)
(1) elastic beam-column element. (2) zero-length rotational spring with Hysteretic material.
(3) zero-length rotational spring with modified IMK material. (4) OpenSees node.
(5) zero-length rotational spring with very small stiffness. (6) truss element.

20
3. Python-Based Computational Platform to Automate Seismic
Design, Nonlinear Structural Model Construction and Analysis of
Steel Moment Resisting Frames
This chapter is adopted from the following study:
Guan, X., Burton, H., & Sabol, T. (2020). Python-based computational platform to
automate seismic design, nonlinear structural model construction and analysis of steel moment
resisting frames. Engineering Structures, 224, 111199.
3.1 Introduction
Steel moment resisting frames (SMRFs) are often used as a part of the lateral force-
resisting systems (LFRS’s) in buildings designed to resist earthquakes. Steel special moment
frames represent one of the few LFRS options that is permitted without restrictions in ASCE 7-16
[30] for buildings exceeding 160 ft (48.77 m) in regions of high seismicity. It is well-known that
SMRFs are able to provide significant inelastic deformation capacity through flexural yielding at
the beam ends and limited yielding in panel zones, which enables ductile response in moderate-to-
severe earthquakes. Another advantage of SRMFs is that they do not require structural walls or
diagonal braces and therefore offer an unobstructed line of sight, which provides flexibility in
architectural design. A recent study by Hamburger and Malley [31] showed that SMRFs typically
impose smaller forces on foundations compared other structural systems, resulting in more
economical sub-structure systems. Because of these advantages, SMRFs have been widely used in
industrial plants, low- and mid-rise residential and commercial buildings, and some tall buildings
as part of a dual LFRS.
There exists an abundance of experimental and numerical studies on developing reliable
modeling techniques for SMRFs [23,24,32], quantifying the influence of the gravity system on

21
collapse risk [33,34], improving the seismic performance through the use of novel devices [35–38]
and quantifying earthquake-induced socioeconomic impacts, such as economic losses, fatalities,
and downtime [4,39,40]. Because most of these studies were performed on one or a few prototype
buildings designed to comply with older or modern building code provisions, their findings cannot
be generalized. Ideally, a large number of building cases should be used to systematically capture
variations in key structural characteristics (e.g., number of stories, number of bays, bay widths,
story heights, and magnitude of dead loads).
To address the challenge of creating a generalizable design space, the concept of archetype
buildings has been proposed. Buildings with similar geometric configuration and/or structural
properties are grouped into representative archetypes. The archetype concept bridges the gap
between performance predictions for a single specific building and the generalized predictions for
a full class of structures [41]. A typical starting point for archetype studies in the domain of seismic
design, analysis and performance-based assessment is to create a design space by identifying the
variables that affect seismic performance and establishing the bounds for each one. Next, each
representative archetype building is designed to comply with the relevant building code(s) and
standard(s). Subsequently, nonlinear structural models are constructed using an appropriate
computational platform and seismic responses are obtained through the relevant analysis
procedures. The final step is to synthesize the results and develop general conclusions regarding
the seismic performance for an entire class of buildings.
The archetype concept has been extensively used in recent years to investigate the seismic
performance of building structures. Some of the earliest work in this area utilized the archetype
approach to assess the collapse risk of both modern (ductile) and older (non-ductile) reinforced
concrete (RC) special moment frame buildings [42–44]. The Applied Technology Council (ATC)

22
developed a systematic approach to assess seismic design provisions for building LFRS’s based
on archetype buildings/models [45]. Soon after, the archetype concept was adopted as part of the
FEMA P695 [6] guidelines, which provides a comprehensive methodology for quantifying the
collapse vulnerability of different LFRS’s. Since then, several other studies utilizing archetypal
buildings have been published (e.g., [34,46,47]). Given the growing significance and popularity of
the archetype concept in performance-based earthquake engineering, there is a need to develop a
set of computational tools and processes to automate seismic design, nonlinear structural model
construction and seismic response analyses (static and dynamic).
The seismic designs reported in the relevant literature [23,41,46,48–50] and engineering
practice are all performed using an iterative process that is based on extensive interactions between
the engineers and the design software. It typically starts by assigning preliminary member sizes
based on engineering judgement and established rule of thumbs. Then the design is evaluated with
the help of the software to determine whether it complies with the relevant building codes and
standards. Based on the evaluation results, the design is revisited accordingly. This process is
repeated until the design satisfies all the relevant requirements and is not excessively conservative.
The major drawback of this process is the extensive involvement of human effort in repeatedly
adjusting designs. While several studies [51–53] in structural engineering introduced the concept
of “computer-automated design”, they are all based on old versions of the building code and no
computation platforms were produced to facilitate the design. Consequently, the designs are still
performed in an iterative manner with extensive human effort. To significantly reduce the
engineers’ effort during the iterative process and to explore the possibility of seismic design
automation, a computational platform with appropriate algorithms, data structures, and
programing structures is developed.

23
This study introduces a Python-based platform that is able to automate the seismic design,
nonlinear structural model generation and response analyses for SMRFs. The Automated Seismic
Design and Analysis (AutoSDA) platform is developed using the object-oriented programing
paradigm and has the two modules shown in Figure 3.1. This first AutoSDA module takes in
building geometry and load information as input and generates code-conforming designs (e.g.,
SMRF member sizes and beam-column joint details). The second module takes in the design
information generated by the first module as input and constructs two dimensional (2D) nonlinear
structural models. It further automates the process of conducting nonlinear static and dynamic
analyses and post-processing the results. As shown in Figure 3.1, the linear static (during the design
process) and nonlinear analyses (of the final design) are performed in the Open System for
Earthquake Engineering Simulation (OpenSees) [2]. All other features have been implemented
using original Python scripts.
Figure 3.1 Overview of the main AutoSDA platform modules
There are several intellectual contributions that are embedded in the AutoSDA platform.

24
First, the object-oriented programing paradigm is used to automate the SMRF seismic designs,
which has the potential to revolutionize the design process. While the current version of the
AutoSDA platform is specific to SMRF’s, it is developed and presented in a generalized manner
such that it can be extended to other LFRS’s. Also, several of the sub-algorithms (e.g., adjusting
member sizes to meet drift requirements, evaluating the design requirements for beams, columns,
and connections, checking for constructability while maintaining design constraints) can be
adapted to other design contexts. Second, the AutoSDA platform enables users to conveniently
bridge the gap between design variables and seismic design and performance outcomes.
Consequently, it could be used to systematically investigate the influence of different design
variables on the design outcome and associated seismic performance (e.g., effect of lateral strength
and collapse resistance). Additionally, the AutoSDA platform drastically reduces the time and
effort involved in generating code-conforming designs and constructing nonlinear structural
models. As such, it could be used to generate a dataset of code-conforming SMRFs. One example
of such a dataset generated by AutoSDA can be found in Guan et al. [54,55]. It includes 621
SMRFs that have been designed in accordance with modern codes and standards, the
corresponding nonlinear structural models, and seismic responses. To the authors’ best knowledge,
this is the largest among all currently publicly available seismic design and response datasets.
Because of this, it can be used to evaluate existing simplified seismic demand estimation methods
and develop new data-driven models. Last, the AutoSDA platform enables the possibility of using
computer-automated (rather than computer-aided) design in the area of structural seismic design.
The inclusion of the details of how the platform is developed and the open source codes have the
potential to help researchers advance truly automated structural designs. The remainder of the
paper begins by introducing the design criteria and modeling strategies for SMRFs. Then, the

25
AutoSDA structure and development details are presented. Illustrative examples are provided to
demonstrate the reliability and efficiency of the platform. Finally, the limitations and possible
extensions of the AutoSDA platform are discussed.
3.2 Seismic Design of SMRFs
3.2.1 Overview of Design Criteria
The core aspect of seismic design for a SMRF is to determine the sizes and detailing for
three basic components: beams, columns, and beam-column connections. Three analysis
procedures, specifically equivalent lateral force (ELF), response spectrum analysis (RSA), and
response history analysis (RHA), are available to determine the design forces and deformations.
The ELF method is adopted in the current version of the computational platform with the
understanding that other alternative analysis methods (RSA and RHA) can be added in the future.
The following main steps are used to design a SMRF using the ELF analysis method:
Step 1: Seismic story forces are determined based on the approximate fundamental period
computed using Equation 12.8-7 of ASCE 7-16 [30]. Preliminary sizes for beams and columns are
determined, typically based on engineering judgement and established rules of thumb. Accidental
torsion is considered in accordance with Section 12.8.4.2 of ASCE 7-16 by assuming that the
center of mass deviates from the geometric centroid by a distance that is 5% of the diaphragm
dimension perpendicular to the direction of the applied forces.
Step 2: An elastic model of the SMRF is constructed and analyzed for a combination of
gravity and lateral seismic story forces. Structural deformations and member forces are obtained
from the elastic analysis.
Step 3: The story drifts obtained from Step 2 are adjusted using the deflection amplification
factor (as specified in Table 12.1-1 of ASCE 7-16) and compared with the drift limit. The drift

26
limit for SMRFs with seismic design categories D, E, or F is taken as Δa/ρ, where Δa is the limit
specific by Table 12.12-1 of ASCE 7-16 [30] and ρ is the redundancy factor determined by Section
12.3.4 of ASCE 7-16 [30]. For other seismic design categories, the drift limit is Δa. It is worth
noting that the story drifts here should include the diminished beam stiffness if reduced beam
section (RBS) connections are adopted. If the drifts are found to be greater than the limit, the
member sizes are increased, and Steps 1 to 3 are repeated. As prescribed in Section 12.8.7 of ASCE
7-16 [30], frame stability should also be checked at this stage unless P-Δ effects have been
explicitly incorporated in the elastic analysis.
Step 4: Column and beam sections are checked to ensure that they satisfy the “highly
ductile member” requirement, which requires the width-to-thickness ratios of flanges and webs to
be less than the limit specified in Table D1.1 of ANSI/AISC 341-16 [56]. The ability of columns
to resist axial loads, shear, bending moments, and axial-flexural demands is evaluated using the
equations specified in ANSI/AISC 360 [57] Chapters E3, G2, F2, and H1, respectively. All of the
demands are determined using the load combinations provided in Sections 2.3 and 2.4 of ASCE
7-16 [30]. Similarly, beams are checked to ensure that they have adequate strength to resist shear
and flexural demands. Additionally, the need for lateral bracing in beams is evaluated to avoid
lateral-torsional buckling.
Step 5: A commonly used prequalified connection, the RBS, is adopted in the current
version of the AutoSDA platform with the understanding that other types of connections (e.g.,
semi-rigid) can be incorporated in the future. The shear and flexural capacities of the beam-column
connections must be greater than the probable maximum shears and moments. According to AISC
341 Chapter E3, the column-beam moment ratio shall be greater than 1.0 to ensure that the strong-
column-weak-beam (SCWB) design criterion is met. For a single-story building or connections at

27
the roof of a multi-story building, the SCWB requirement is exempted. The need for doubler plates
and continuity plates is also evaluated in this step.
Step 6: At this stage, a design that satisfies all the requirements specified in the relevant
building code and standards is obtained. However, the design sizes might not be the most suitable
for construction purposes. For example, the same member size is typically used in every two or
three adjacent stories. Additionally, lower stories generally have deeper columns than upper stories
to accommodate splice connections and the beams at the lower floor levels are typically deeper
and stronger than the ones above.
Further details regarding the seismic design of SMRFs can be found in the relevant building
code and design standards (e.g., [30,56,57]).
3.2.2 Nonlinear Modeling of SMRFs
Key to the development of nonlinear structural models for SMRF’s is the numerical
representation of beams, columns, and beam-column connections. For nonlinear analyses ranging
from the onset of damage to collapse, the adopted technique should ideally capture the strength
and stiffness deterioration of these structural components, which has been shown to significantly
influence structural seismic responses. The widely used concentrated plasticity model is adopted
in the current version of the AutoSDA platform. Further details regarding the nonlinear structural
modeling of SMRFs can be found in Chapter 2.
3.3 Seismic Design Module
3.3.1 Overview
An overview of the workflow for the seismic design module is presented in Figure 3.2. A
one-time preprocessing of the electronic steel section database is first performed. Then, the
relevant seismic design parameters are received as input, beam and column sizes are initialized,

28
and the member-sizes are adjusted to satisfy the drift requirement. Subsequently, the beams,
columns, and connections are checked to ensure that they satisfy the relevant strength and detailing
requirements and the member sizes are revised as needed. Lastly, the member sizes are adjusted
to account for ease of construction and the final design is generated. The details of each of the
main steps in the procedure are presented in the following sections.
Figure 3.2 Overview of the seismic design module
3.3.2 Preprocessing the Electronic Database of Wide Flange Sections
To facilitate the iterative adoption of SMRF beam and column sizes, the electronic database
of wide flange sections provided by the American Institute of Steel Construction (AISC) is pre-
processed. The entire database includes all wide flange shapes that are currently manufactured in
the industry. However, only those satisfying the high ductility requirement can be used as a SMRF
column or beam section. Moreover, the adoption of RBS connections introduces more stringent
requirements on the beam and column sections. More specifically, the section depth, weight, and

29
flange thickness of beams must be less than W36, 300 lb/ft, and 1.75 inches, respectively. Also,
column section depths must be less than W36. Based on these requirements, the original database
is filtered to create two new sub-databases of all possible beam and column sections. The section
sizes are listed in descending order of the moment of inertia and the plastic section modulus in the
column and beam sub-database, respectively. An index beginning from zero and incremented at
values of one is attached to each sub-database to denote the order of section sizes (zero represents
the strongest section).
3.3.3 Design Automation Algorithms
The sub-algorithm used to optimize the member sizes to meet the relevant drift requirement
is presented in Figure 3.3. Two important coefficients are predefined by the user: the moment of
inertia ratio between the exterior and interior columns (Icol,ext/Icol,int) and the plastic section modulus
ratio between the beam and interior column (Zbm/Zcol,int). These two coefficients impose additional
constraints on the beam and column section sizes, which will be enforced throughout the entire
design process. Based on a review of industry-generated SMRF designs [48], Icol,ext/Icol,int typically
ranges from 0.6 to 0.8. The typical range for Zbm/Zcol,int is 0.7 to 0.8 for buildings with less than 10
stories and 0.45 to 0.7 for taller buildings.
As shown in Figure 3.3, after taking in the relevant input parameters, the algorithm begins
by initializing all the beams and columns in the SMRF with the maximum allowable sizes specified
in their respective section sub-database. Then a linear elastic model of the SMRF is constructed in
the Open System for Earthquake Engineering Simulation (OpenSees) [2] platform and subjected
to equivalent lateral story forces in accordance with ASCE 7 Section 12.8. Subsequently, the story
drifts obtained from the elastic analysis are compared with the allowable limit: 2% at the design
basis earthquake hazard level. The design module also allows the user to specify a different drift

30
limit based on a desired performance objective. Figure 3.3 summarizes the “brute force” approach
that is used to target the desired design drift level. First, the story that has the minimum drift is
identified and labeled as the “target story”. The size of the interior columns in the “target story” is
decreased such that the new section is just one index higher than the previous one in the column
section sub-database. Then, the design of the beams and exterior columns is revisited to ensure
that Icol,ext/Icol,int and Zbm/Zcol,int is within some acceptable tolerance of the value defined by the user.
At this stage, new section sizes are assigned to the members in the “target story” and the elastic
analysis is repeated to obtain updated drift demands and member forces. This process is repeated
until the maximum story drift exceeds 2%, which is followed by a comparison between the sections
in the current and initial designs (which is based on the maximum allowable sections). If these two
designs are the same, the implication is that no valid design exists within the member sub-databases.
Otherwise, the current member sizes are reduced by one index at a time until the design drift is
less than (but closest to) the allowable limit. At this stage, the member sizes have been optimized
to meet the drift requirement. Since P-Δ effects are explicitly included in the elastic analysis, a
frame stability check is not implemented.

31
Figure 3.3 Overview of sub-algorithm used to achieve the desired target drift demand
As shown in Figure 3.4, after the member sizes are proportioned to meet the drift
requirements, component-by-component checks are performed. While SMRF beam and column
sizes are typically governed by the drift requirements, strength evaluations are still performed to
ensure the robustness of the algorithm. Each column is individually evaluated to ensure that the
axial, shear, flexural, and axial-flexural strength requirements specified in ANSI/AISC 360 [57]
Chapters E3, G2, F2, and H1, respectively, are satisfied. If a column does not satisfy at least a
single strength requirement, its section size is increased such that the new size is one index lower
in the column section sub-database. Based on the newly determined column size, the elastic
analysis is repeated to ensure that the drift demands are still within the required limit. Meanwhile,
the force demands in each member are updated based on the results of this analysis. This procedure
is repeated until all columns in the SMRF satisfy the relevant strength requirements. A similar
process is implemented for the beams to ensure that they all satisfy the relevant requirements.
Initialize member sizes
Perform elastic analysis
If drift <= 2% Yes
No
Current sizes
= initial sizes?No solution exists
Yes
Find the story that has
minimum drift
Use size before last
iteration
No
Decrease interior column in
Target Story by one indexStory
Drifts
TargetStory
Zbm/Zint.col
Iext.col/Iint.colDetermine new exterior
column size in Target Story
Determine new beam size inTarget Story
New Sizes
Input

32
Figure 3.4 Overview of sub-algorithm used to check the feasibility of beams, columns and
connections
The algorithm subsequently evaluates each beam-column connection based on the
requirements specified in AISC 358 [58] Chapter 5. More specifically, the beams are checked to
ensure that they can resist the demands based on the expected flexural strength at the center of the
RBS. The beam-column connections are further checked to ensure that they comply with the
SCWB criterion. As shown in Figure 3.5, the following parameters are first computed: (1) the
required shear strength of the beam (Vu), which is based on the probable moment and shear caused
by gravity, (2) the probable maximum moment at the column face (Mf), (3) the shear capacity of
the beam (Vn), (4) the plastic moment of the beam based on expected yield stress (Mpe), (5) the
sum of the moments in the column above and below the joint at the intersection of the beam and
column centerlines (ΣMpc*), and (6) the sum of moments in the beams at the intersection of the
beam and column centerlines (ΣMpb*). A typical “switch-case” programing structure is then
Yes
Beam strength is
sufficient?
No Increase beam size
Perform elastic analysis
and ensure drift <= 2%
Optimal design results
Evaluate beam-column
connection
Column strength
is sufficient?
NoIncrease column size
Perform elastic analysis
and ensure drift <= 2%
MemberSizes
Yes

33
adopted to evaluate which design requirement is violated and an appropriate ameliorative measure
is taken. If the shear or bending moment capacity is found to be less than their corresponding
expected demands, the algorithm revises the beam design such that the new section size is one
index lower than the old one in the section sub-database. If the SCWB criterion is not met, the
column section is increased. Since a typical connection (with the exception of the roof) consists of
two columns (one in the upper story and the other in the lower story), the one that is adjusted is
determined based on the relationship between the plastic section modulus of those two columns.
The column in the upper story is selected if its plastic section modulus is found to be 50% less
than the one in the lower story. Otherwise, the column in the lower story is selected. Note that the
assumed 50% threshold could be adjusted by the user. The entire process of evaluating the strength
and SCWB ratio for the connections is repeated until all members and connections satisfy the
design requirements.
At this stage, the algorithm has generated SMRF member sizes that satisfy all design
requirements. Subsequently, the member sizes are further adjusted to account for ease of
construction. The beam sections are first adjusted such that identical section sizes are used over a
specified number of adjacent stories. The detailed algorithm for adjusting beam sizes is presented
in Figure 3.6. Starting from the roof and moving downward, the beams are grouped by the number
of adjacent floors specified by the user. Then, the algorithm determines whether the beams at the
current floor level i and the next lower level (i-1) belong to the same group (i.e., whether beams at
levels i and i-1 are supposed to have identical section sizes). If they belong to the same group, the
appropriate adjustments are made such that they have the same section size. Otherwise, the
algorithm takes another set of different actions to ensure that the beam at level i-1 has a larger
depth and moment of inertia than the one at level i. This process is coded using a compound “if-

34
else” structure and, as shown in Figure 3.6, there are ten possible cases in total. It should be noted
that the algorithm shown in Figure 3.6 is generic and can be used for other LFRS’s (e.g., RC
moment frames) to ensure the ease of construction. After adjusting the beam sizes, the size of those
columns that do not meet the SCWB criterion is increased. The previously described process is
repeated for columns to ensure that the same section size is used over a user-specified number of
adjacent stories. The detailed design of column splice is not implemented in the current version of
the AutoSDA platform. Additionally, the response of the splice connection is not explicitly
represented in the nonlinear structural model.
The algorithm eventually generates a design that complies with the relevant code and
standards while accounting for ease of construction. An additional elastic analysis is performed to
obtain the updated design information, including the column-to-beam flexural strength ratio,
demand-to-capacity ratio, design drifts, etc.

35
Figure 3.5 Overview of the sub-algorithm used to ensure that the design requirements for all
beam-column connections are satisfied

36
Figure 3.6 Overview of the sub-algorithm used to revise the beam sizes for ease of construction
No
Di-1 < DiNo Yes
Ii-1 < IiNo Yes
Si-1 = Si
(1) (2) (3) (4) (5)case:
(6) (7) (8) (10)case:
Ii-1 <= IiYesNo
(9)
next lower floor (i-1)
Find new size S' at i:
D' = Di and I' ˜ Ii-1
Yes
Si-1 = Si
Si-1 == Si
lump beams into
different groupsN, M Loop over from
top to bottom
YesNo
Di-1 <= Di
No
Ii-1 <= IiNo Yes
Si-1 = Si Si = Si-1
YesNo
Yes
Ii-1 <= Ii
Si-1 = SiFind new size S' at i:
D' = Di and I' ˜ I i-1
current floor i i and (i-1) are
in differentgroup
No
Yes
Di-1 == Di
Nomenclature:
N: number of stories for the building
M: number of stories that should be adjusted to have identical size
Si: section size at floor level i
Di: section depth at floor level i
Ii: moment of inertia of section at floor level i
Si == Si-1: condition if current section size is the same as the lower section size
Si = Si-1: change the section size at floor level i to be the same as that at level (i-1)

37
3.3.4 Object-Oriented Programming Structure
The AutoSDA platform is written in Python using the object-oriented paradigm. The
overall programming structure for the seismic design module including the associated class
definitions are shown in Figure 3.7. As noted earlier, the input parameters for the seismic design
module are the building geometry (number of stories, number of bays, story heights, bay widths,
and the number of SMRFs in each principal direction), loads (dead and live loads on each floor),
site conditions (mapped spectral acceleration parameters and site class), and the parameters used
in the equivalent lateral force procedure (response modification coefficient, importance factor,
deflection amplification factor, redundancy factor, and parameters used to estimate fundamental
period). Additional engineering-judgement based input parameters include the user-specified
allowable drift limit, Icol,ext/Icol,int, Zbm/Zcol,int, the threshold for the ratio of the column moment of
inertia in upper story to the one in the lower story (Ilower/Iupper), the number of adjacent stories that
are required to have the same section size, and a list of discrete values for the beam/column section
depths that will be considered. The design module outputs the member sizes, design drifts,
connection detailing, and demand-to-capacity ratios. The interface for the inputs and outputs are a
set of .csv files.
The seismic design module consists of six classes: Building, ElasticAnalysis, ElasticOutput,
Column, Beam, and Connection. The Building class reads all the building information from input
files, computes the necessary “higher-level” variables used for seismic design, initializes the
member sizes and the adjust designs. The ElasticAnalysis class incorporates a series of member
functions that generate a set of text files, which are used to construct the OpenSees model for the
elastic analysis. The role of the ElasticOutput class is to extract the member axial, shear, and
flexural demands from the analysis output files, implement the necessary load combinations and

38
determine the governing demands for the beams and columns. The Beam, Column, and Connection
classes check whether each component satisfies the relevant requirements and stores the pertinent
data (e.g., strengths, demands, and lateral bracing).
3.4 Nonlinear Model Construction and Analysis Module
The nonlinear model construction and analysis (NMCA) module takes the design results
as input, constructs nonlinear structural models, and performs static and/or dynamic structural
response analyses. As noted earlier, the current version of the AutoSDA platform only allows the
user to build a 2D structural model using the concentrated plasticity model for the beam-column
elements. However, future versions can be adapted to incorporate 3D models and other types of
beam-column elements (e.g., elements with fiber sections or finite length hinge model). The
overall programing structure and associated class definition for the NMCA module is shown in
Figure 3.8. There is only one class: NonlinearModelGeneration. It provides a set of static methods
to write the text files, which are further used to generate the nonlinear structural models in
OpenSees and perform eigenvalue, static pushover over, and dynamic analyses (including
incremental dynamic analysis to collapse). Once all the necessary text files have been generated,
the OpenSees execution file is called directly from the Python environment. Additionally, the
NMCA module provides a set of independent functions to visualize the analysis results. The
building weight, nodal forces and nodal displacements from the pushover analysis is used to plot
the normalized base shear vs. roof drift. Peak story drifts and floor accelerations and residual story
drifts can also be extracted from the dynamic analysis results. Three statistical methods, maximum
likelihood estimation, minimizing sum of squared errors and Probit regression, are available to fit
the extracted engineering demand parameters at different intensities to a lognormal distribution
[59], which can then be visualized (e.g., collapse fragility curve).

39
Figure 3.7 Programing structure of the seismic design module
ElasticOutputraw_column_load
raw_beam_load
dead_load_case
live_load_case
earthquake_load_case
load_combinations
dominate_load
member data:class name:
class method: read_load_from_OpenSees()
extract_column_load()
extract_beam_load()
perform_load_combination()
determine_dominate_load()
Column
section_sizedemand
strength
demand_capacity_ratio
plastic_hinge
is_feasible
member data:class name:
check_geometry_limit()
check_axial_strength()
check_shear_strength()
check_flexural_strength
check_combined_loads()
compute_DC_ratio()
calculate_hinge_parameters()
class method:
Beam
section_sizedemand
strength
demand_capacity_ratio
plastic_hinge
is_feasible
member data:class name:
check_geometry_limit()
check_shear_strength()
check_flexural_strength()
compute_DC_ratio()
calculate_hinge_parameters()
class method:
Connection
connection_typeRBS_dimension
momentshear_force
doubler_plate_thickness
is_feasible
member data:class name:
determine_RBS_dimension()
compute_probable_moment()
compute_shear_force()
check_moment_capacity()
check_shear_capacity()
check_SCWB()
determine_doubler_plate()
class method:
Seismic Design Module
Additional parameters:
drift limit
Iext, col/Iint,col
Zbeam/Zint,col
Ilower/Iupper
number of story havingsame size
upscale_column()
upscale_beam()
constructability_beam()
constructability_column()
Output Member size:
interior column
exterior column
beam
Design drifts:
drift profile
under design
load
Connection design:
RBS dimension
Panel zone
SCWB ratio
Strength D/C ratios:demand to capacity
ratios for each
component
InputGeometry:number of story
number of bay
first story height
typical story height
bay width
number of SMRFs
Loads:
floor dead load
floor live load
roof dead load
roof live load
Site conditions:Ss, S1, site class
ELF parameters:
Cd, R, Ie, rho
Ct, x, TL
Member depths:beam depths
column depths
Python Class
Building
building_idgeometry
gravity_loads
elf_parameters
seismic_force
design_drifts
member_sizeconstruction_size
member data:read_geometry()
read_gravity()
read_elf_parameters()
compute_seismic_force()
determine_member_candidates()
initialize_member()
read_story_drift()
optimize_member_for_drift()
class method:class name:
ElasticAnalysiswrite_nodes()
write_fixities()
write_floor_constraint()
write_beam()
write_column()
write_leaning_column_spring()
write_mass()
write_all_recorders()
write_gravity_load()
write_lateral_load()
copy_baseline_files()
run_OpenSees_program()
class method:class name: Elastic model:

40
Figure 3.8 Programming structure of the NMCA module
3.5 Illustrative Examples
3.5.1 Seismic Design
Unlike currently available commercial software, which only provide the final results, the
seismic design module of AutoSDA documents all iterations of the design process. In other words,
the AutoSDA design process is not a black box and can be carefully scrutinized by the user. A
five-story office building located in Los Angeles (34.008°N, 118.152°W) is used to illustrate how
the design module iteratively updates member sizes to meet the relevant design criteria. As shown
in Figure 3.9, the building has SMRFs in the two principal directions. The floor and roof dead load
are taken to be 80 psf (3.83 kN/m2) and 67.5 psf (3.23 kN/m2), respectively. The live loads for a
typical floor and the roof are taken as 50 psf (2.39 kN/m2) and 20 psf (0.96 kN/m2), respectively,
in accordance with Table 4-1 of ASCE 7-16 [30]. The selected location corresponds to site class
D and the mapped response spectral accelerations are Ss = 2.25 g and S1 = 0.6 g. Besides these
variables, the following input parameters are defined: the range of member depths for the columns
Python ClassNonlinearModelGeneration
write_nodes()
write_fixities()
write_floor_constraint()
write_beam()
write_column()
write_beam_hinge()
write_column_hinge()
write_mass()
class method:class name:
write_panel_zone()
write_gravity()
write_all_recorders()
copy_baseline_files()
write_eigenvalue_analysis()
write_pushover_loading()
write_damping()
write_dynamic_analysis_parameters()
Model Generation Module
New class to be definedclass method:class name:
Model the SMRF using other modeling
techniques, e.g., fiber elements or
finite length plasticity.
Output: Structural Model in OpenSees Static and dynamic analysis visualization:

41
and beams are set as W14 and W21-W36, respectively. Icol,ext/Icol,int and Zbm/Zcol,int are both set to
0.70. For ease of construction, it is assumed that the SMRF beam and column sizes are the same
every two stories.
(a)
(b)
Figure 3.9 Building case used to illustrate the AutoSDA design process: (a) floor plan and (b)
elevation of SMRF
After receiving the input parameters, the program begins the iterative seismic design
process. The variation in member sizes during a subset of the iterations is illustrated in Figure 3.10.
To begin, all beams and columns are assigned the maximum allowable size from their respective
sub-database based on the user-specified depths (Figure 3.10(a)). Then, an elastic analysis is
performed, and it is determined that the minimum drift along the frame height is in the uppermost
story. Consequently, the interior column size in the uppermost story is reduced and the size of the
exterior columns and beams are determined based on the predefined Icol,ext/Icol,int and Zbm/Zcol,int
values (Figure 3.10(b)). The elastic analysis is repeated with the new section sizes to determine
which members should be optimized in the next step. After 54 iterations, the program reaches the
point where the section sizes that have the smallest moment of inertia and meet the drift
requirement are selected (Figure 3.10(c)). Subsequently, those section sizes are checked against
North
5@30 ft = 150 ft
(5@
9.1
m =
45.5
m)
5@
30 f
t =
150 f
t
([email protected] m = 45.5m)
(5@
3.9
6 m
= 1
9.6
5 m
)
3@30 ft = 90 ft
Ground
2nd Floor
3rd Floor
4th Floor
5th Floor
Roof
5@
13
ft
= 6
5 f
t
Floor dead load: 80 psf (3.83 kN/m2)
Roof dead load: 67.5 psf (3.23 kN/m2)
Site class: D Ss = 2.25 g, S1 = 0.6 g

42
the requirements for beams and columns, but no revision is needed (Figure 3.10(d)). Each
connection is evaluated, and it is found that all connections meet the SCWB criterion. Therefore,
no revision is made (Figure 3.10(e)). After all design requirements are satisfied, the program
outputs the code-conforming section sizes (Figure 3.10(f)). The beam and column sizes (Figure
3.10(g)) are adjusted to account for ease of construction, which produces the final design shown
in Figure 3.10(h).
(a)
(b)
(c)
(d)
W36X282
0.264%
0.458%
0.604%
0.660%
0.442%
W14X
730
drifts:
W14X
730
W14X
730
W36X282
W14X
730
W14X
730
W36X282
W14X
730
W14X
730
W36X282
W14X
730
W14X
730
W36X282
W14X
730
W14X
730
W36X282
0.290%
0.461%
0.604%
0.660%
0.442%
drifts:
W14X
730
W14X
730
W36X282
W14X
730
W14X
730
W36X282
W14X
730
W14X
730
W36X282
W14X
730
W14X
550
W36X256
W14X
665
W1
4X
23
3
W27X129
1.931%
1.896%
1.900%
1.865%
1.827%
drifts:
W1
4X
28
3
W1
4X
37
0
W36X170
W1
4X
45
5
W1
4X
28
3
W21X182
W1
4X
34
2
W1
4X
25
7
W21X166
W1
4X
31
1
W1
4X
13
2
W21X73
W1
4X
13
2
W1
4X
23
3
W27X129
1.931%
1.896%
1.900%
1.865%
1.827%
drifts:
W1
4X
28
3
W1
4X
37
0
W36X170
W1
4X
45
5
W1
4X
28
3
W21X182
W1
4X
34
2
W1
4X
25
7
W21X166
W1
4X
31
1
W1
4X
13
2
W21X73
W1
4X
13
2

43
(e)
(f)
(g)
(h)
Figure 3.10 Changes in member sizes at different design stages: (a) initial sizes, (b) member
sizes after first optimization for drift requirement, (c) most economical sections satisfying drift
requirement, (d) section sizes after checking requirements for beams and columns, (e) design
after checking strong-column-weak-beam criterion, (f) code-conforming design, (g) member
sizes after adjusting beams for ease of construction, and (h) final design
3.5.2 Efficiency in Time Needed to Complete Design
The time needed to design a single building is used as a measure of the efficiency of the
AutoSDA platform. To gain comprehensive insight into the design duration (from start to
W14X
233
W27X129
1.931%
1.896%
1.900%
1.865%
1.827%
drifts:
W14X
283
W14X
370
W36X170
W14X
455
W14X
283
W21X182W
14X
342
W14X
257
W21X166
W14X
311
W14X
132
W21X73
W14X
132
W14
X2
33
W27X129
1.931%
1.896%
1.900%
1.865%
1.827%
drifts:
W14
X2
83
W14
X3
70
W36X170
W14
X4
55
W14
X2
83
W21X182
W14
X3
42
W14
X2
57
W21X166
W14
X3
11
W14
X1
32
W21X73
W14
X1
32
W14X
233
W36X170
1.871%
1.830%
1.831%
1.433%
1.438%
drifts:
W14X
283
W14X
370
W36X170
W14X
455
W14X
283
W21X182
W14X
342
W14X
257
W21X182
W14X
311
W14X
132
W21X73
W14X
132
W36X170
1.866%
1.759%
1.817%
1.391%
0.942%
drifts:
W14X
455
W14X
370
W36X170
W14X
455
W14X
283
W21X182
W14X
342
W14X
283
W21X182
W14X
342
W14X
132
W21X73
W14X
132
W14X
370

44
generation of the final design), 11 buildings with different numbers of stories and bays are designed
using the AutoSDA platform on a computer with 16 GB RAM and Intel i7 3.6 GHz processor. The
number of stories and bays for those 11 buildings ranges from 1 to 19 and 1 to 5, respectively. All
other design information (gravity load, site condition, story heights, and plan dimensions) are the
same as the building presented in Section 3.5.1 except that the bay width for those 11 buildings is
20 ft (6.1 m). The design duration for those buildings is listed in Table 3.1. It is worth noting that
the design duration measured for the AutoSDA does not include the time for collecting the input
data (including building geometry, loads, ELF parameters, site conditions, and member depths).
All the input data are considered to be immediately available once the building information is
given. The design process for low-rise, mid-rise, and high-rise buildings takes approximately 1
minute, 5 minutes, and 40 minutes, respectively. This is significantly less than the time it would
take to perform these designs manually, which is an indication of the efficiency of the
computational platform.
Table 3.1 Design duration for buildings with different numbers of stories and bays
Number of stories
Number of bays
Design Duration (seconds)
1-story 5-story 9-story 14-story 19-story
1-bay 21 \* \ \ \
3-bay 28 162 295 1128 1368
5-bay 31 161 295 1902 2478 * The cells marked with “\” represent cases where either the design is impractical or no design solution exists for the
combination of bays and the number of stories.
3.5.3 Verification of the Seismic Design Module
Despite its efficiency and the ability to keep track of the entire process, the reliability of
the generated designs is a major concern. To address this issue, three buildings designed and
reviewed by industry structural engineers and researchers are selected to assess the reliability of
the module.

45
3.5.3.1 Comparison with designs produced by Englekirk Structural Engineers
As part of the ATC-123 project [48], three- and nine-story SMRF office buildings located
in Los Angeles were designed by Englekirk Structural Engineers (https://www.englekirk.com).
As shown in Figure 3.11 and Figure 3.12, both buildings have two SMRFs in the two orthogonal
directions. The SMRF in the North-South direction is designed using AutoSDA and compared
with the Englekirk designs. The dead loads on a typical floor and roof for both buildings are 106
psf (5.08 kN/m2) and 83 psf (3.97 kN/m2), respectively. The site class is D and the associated
spectral response accelerations are Ss = 2.25 g and S1 = 0.6 g. The comparison between the
Englekirk designs and the ones generated by the AutoSDA platform are summarized in Table 3.2
and Table 3.3. It is observed that the two designs are quite comparable. Figure 3.13 shows a
comparison of the design story drifts, which are also similar. Based on these two metrics, it is
concluded that the designs generated by AutoSDA are comparable to the overall Englekirk designs.

46
(a)
(b)
Figure 3.11 Three-story building used in the ATC 123 project [48]: (a) floor plan and (b)
elevation view
(a)
(b)
Figure 3.12 Nine-story building used in the ATC 123 project [48]: (a) floor plan and (b)
elevation view
4@
30
ft
= 1
20
ft
North
6@30 ft = 180 ft(4
@9
.1 m
= 3
6.4
m)
([email protected] m = 54.6 m)
4@30 ft = 120 ft
Ground
2nd Floor
3@
13 f
t =
39 f
t
Floor dead load: 106 psf (5.08 kN/m2)
Roof dead load: 83 psf (3.97 kN/m2)Site class: DSs = 2.25g, S1 = 0.6g
(3@
3.9
6 m
= 1
1.8
8 m
)
3rd Floor
Roof
([email protected] m = 36.4 m)
5@30 ft = 150 ft
5@
30
ft
= 1
50 f
t
North
Floor dead load: 106 psf (5.08 kN/m2)
Roof dead load: 83 psf (3.97 kN/m2)
Site class: D
(5@
9.1
m =
45.5
m)
([email protected] m = 45.5 m)
Ss = 2.25g, S1 = 0.6g
(5.5
m)
(8@
3.9
6 m
= 3
1.6
8 m
)
([email protected] m = 45.5 m)
7th Floor
8th Floor
9th Floor
Roof
5@30 ft = 150 ft
18 f
t
Ground
2nd Floor
3rd Floor
4th Floor
5th Floor
6th Floor
8@
13 f
t =
104 f
t

47
(a)
(b)
Figure 3.13 Comparing design story drifts for the Englekirk and AutoSDA designs: (a) three-
story and (b) nine-story buildings
Table 3.2 Comparing member sizes between designs produced by Englekirk and the AutoSDA
platform for the three-story building
Story
Englekirk Seismic Design Module
Exterior
column
Interior
column Beam
Exterior
column
Interior
column Beam
3 W14X211 W14X311 W27X94 W14X132 W14X159 W27X94
2 W14X311 W14X370 W33X130 W14X311 W14X455 W30X132
1 W14X311 W14X370 W33X130 W14X311 W14X455 W30X132
Table 3.3 Comparing member sizes between designs produced by Englekirk and the AutoSDA
platform for the nine-story building design
Story Englekirk Seismic Design Module
Exterior column Interior column Beam Exterior column Interior column Beam
9 W14X233 W14X311 W27X94 W14X132 W14X145 W33X130
8 W14X233 W14X311 W30X116 W14X311 W14X455 W33X130
7 W14X370 W14X398 W36X150 W14X311 W14X455 W33X130
6 W14X370 W14X398 W36X150 W14X398 W14X550 W33X152
5 W14X398 W14X426 W36X182 W14X398 W14X550 W33X152
4 W14X398 W14X426 W36X194 W14X426 W14X605 W36X160
3 W14X455 W14X500 W36X232 W14X426 W14X605 W36X160
2 W14X455 W14X500 W36X232 W14X500 W14X665 W36X170
1 W14X455 W14X550 W36X232 W14X500 W14X665 W36X170

48
3.5.3.2 Comparing with designs produced by researchers
A four-story office building located in Los Angeles was developed by Lignos [23] and its
seismic performance was evaluated. As shown in Figure 3.14, the buildings have two SMRFs in
each orthogonal direction. The SMRF in the North-South direction was designed using the
AutoSDA platform. The floor and roof weights are 1050 kips (4670 kN) and 1200 kips (5338 kN),
respectively. The site class is D and the associated spectral acceleration parameters are Ss = 1.5 g
and S1 = 0.6 g. The allowable drift limit is taken as 2.5% because the building was designed using
the 2003 International Building Code [60]. Additional details of the building can be found in
Chapter 5 of Lignos [23]. The comparison between the designs reported by Lignos [23] and the
one generated by the AutoSDA platform is summarized in Table 3.4. It is observed that the section
sizes for the two designs are quite comparable, which demonstrates the reliability of the AutoSDA
platform.
(a)
(b)
Figure 3.14 Four-story office building reported by Lignos [23]
3@
30
ft
= 9
0 f
t
North
Floor weight: 1050 kips (4670 kN)
Roof weight: 1200 kips (5338 kN)
Site class: D
4@30 ft = 120 ft
(3@
9.1
m =
27
.3 m
)
([email protected] = 36.4 m)
Ss = 1.5 g, S1 = 0.6 g
4@30 ft = 120 ft
Ground
2nd Floor
3@
12
ft
= 3
6 f
t
3rd Floor
4th Floor
Roof
([email protected] m = 36.4 m)
(4.5
7 m
)(3
@3
.66
m =
10
.98
m)
15
ft

49
Table 3.4 Comparing member sizes between designs produced by the AutoSDA platform and
Lignos [23]
Story Lignos [23] Seismic Design Module
Exterior/Interior column Beam Exterior/Interior column Beam
4 W24X76 W21X93 W24X76 W21X68
3 W24X76 W21X93 W24X76 W21X68
2 W24X117 W27X102 W24X131 W27X102
1 W24X117 W27X102 W24X131 W27X102
3.5.4 Comparing Features of AutoSDA with Commercial Software: RAM Steel and SAP
2000
The seismic design module is compared with commercial software to illustrate its
advantages and limitations. RAM Steel and SAP 2000, which are commonly used structural design
software, are selected for this purpose. The comparison is summarized in Table 3.5. In RAM Steel,
the user manually constructs the elastic SMRF model using a graphical user interface (GUI). In
contrast, this process is automated in the AutoSDA platform and SAP 2000 without the user’s
intervention. As for the design process, RAM Steel can only evaluate the feasibility of a specified
design. In other words, the member sizes must be assigned and adjusted by the user. While SAP
2000 provides an “auto-list” function that implies seismic design automation, it simply determines
the member sizes based on the demands from the previous elastic analysis without updating the
demands. The user needs to perform a manual iteration to finalize the design. These issues are not
present in the seismic design module of AutoSDA. As noted earlier, another advantage of the
AutoSDA platform is that it automatically tracks each change in member size during the entire
design process. However, both RAM Steel and SAP 2000 do not have this capability. Moreover,
the time spent to perform a design using RAM Steel and SAP 2000 depends on the user and is on
the order of several hours to days. In contrast, the longest running time for a single design using
the AutoSDA platform is less than one hour. A limitation of the AutoSDA platform is that its

50
current version is limited to 2D modeling and it cannot deal with torsional irregularity or other
three-dimensional effects. However, given the adopted object-oriented programming structure and
modular framework, the AutoSDA platform can be easily extended to consider three-dimensional
issues. Also, the current version of the AutoSDA platform can only produce designs using
equivalent lateral force analyses, whereas both SAP2000 and RAM Steel can accommodate produce
RSA- and RHA-based designs. Lastly, AutoSDA does not have a graphical user interface (GUI)
which is included in both SAP 2000 and RAM Steel.
Table 3.5 Comparing features of RAM Steel, SAP 2000, and the AutoSDA platform
Features RAM Steel SAP 2000 Seismic design module
Auto-modeling × √ √
Auto-iterative design × × √
Auto-tracking of the design process × × √
3D modeling (torsional irregularity) √ √ ×
Design duration depends on the user depends on the user < 1 hour
RSA and RHA-based design √ √ ×
Graphical User Interface (GUI) √ √ ×
3.5.5 Nonlinear Static and Dynamic Analysis of SMRF Buildings
The three-story building used in the ATC 123 project is used to illustrate the features of
the NMCA module. Both nonlinear static and dynamic analyses, including incremental dynamic
analyses, are performed. The pushover loading pattern is determined using the equivalent lateral
force procedure prescribed in Chapter 12 of ASCE 7-16 [30] and assuming that the response is
governed by the first mode of vibration. The pushover response for the North-South SMRF is
shown in Figure 3.15. The frame base shear is normalized with respect to its tributary seismic
weight. The maximum base shear observed in Figure 3.15 is 0.39, whereas the design base shear
is 0.1. The overstrength factor, which is defined as the ratio of the maximum base shear to the
code-design base shear [6], is computed as 3.86, which is greater than the code-specified minimum

51
of 3.0. The period-based ductility ratio, which is defined as the ratio of the roof drift corresponding
to a 20% drop in the maximum base shear to the yield roof drift [6], is also computed. The drift
corresponding to a 20% drop in the maximum base shear is 0.075 and the yield drift is 0.011.
Therefore, the ductility ratio is 6.97. The resulting values for the overstrength factor and ductility
ratio serve as further indication of the reliability of the AutoSDA-generated designs.
Figure 3.15 Monotonic pushover curve for the three-story building
The seismic performance of the three-story building is assessed using truncated
incremental dynamic analyses (IDA) [61]. The set of 44 (22 pairs) far-field ground motions
selected as part of the FEMA P695 project [6] is used. The scaling for the truncated IDAs is
performed such that the median spectral acceleration of the record-set matches the target intensity
levels, which ranges from 20% to 300% of the spectral acceleration corresponding to the maximum
considered earthquake (SaMCE).
The truncated results are used to generate a collapse fragility, where a lognormal
distribution function is used to fit the simulation data via the maximum likelihood method. The
collapse fragility curve for the three-story building is shown in Figure 3.16. The collapse margin

52
ratio (CMR), which is defined as the ratio of the median collapse spectral acceleration to SaMCE, is
computed. The median collapse capacity observed from Figure 3.16 is 3.44 g and the SaMCE is 1.22
g, which corresponds to a CMR of 2.81. This result is further adjusted by applying a spectral shape
factor of 1.36 (FEMA P695 Table 7-1). Thus, the adjusted collapse margin ratio (AMR) is 3.82.
According to Table 7-3 of FEMA P695, the minimum permissible ACMR, which is based on an
MCE level collapse probability of 10%, is 1.83. The ACMR for the three-story building is twice
the permissible value, indicating acceptable collapse performance. This observation serves as
further evidence of the reliability of the AutoSDA-based designs.
Figure 3.16 Collapse fragility for the three-story building
3.6 Adaptability of the AutoSDA Platform and Possible Future Extensions
The AutoSDA platform makes extensive use of object composition such that all data and
functions are encapsulated into abstract classes. The object-oriented programing structure allows
future developers to augment the platform and enhance its functionality. For example, it could be
easily adjusted to construct structural models using other types of nonlinear beam-column

53
elements (instead of or in addition to the concentrated plasticity model) by simply adding a new
class that can serve as an alternative to the current NonlinearModelGeneration class shown in
Figure 3.8. An “if-else” switch can then be added prior to the model generation module to
determine the desired modeling technique. Moreover, the platform could also be extended to
implement 3D structural modeling which can be used to investigate issues such as torsional
irregularities and orthogonal loading effects.
In addition to being object-oriented, the platform is highly modular. This allows future
developers to conveniently extend the platform by incorporating other applications without
changing the code in the existing modules. One possible extension is the addition of two more
modules that incorporate ground motion selection and economic loss assessment. The former will
take a target response spectrum and its standard deviation over a range of periods as input and will
output a list of scaled or unscaled earthquake records from the PEER NGA-WEST2 [62] database.
Those ground motion records can then be passed to the NMCA module for nonlinear response
history analyses. The loss assessment module can take the engineering demand parameters from
the NMCA module and use them to evaluate earthquake-induced financial losses using the FEMA
P-58 methodology [4]. The implementation of those two modules would produce an end-to-end
computational platform for performance-based seismic design.
The entire platform is well-encapsulated such that it could incorporate parallel computing.
As noted earlier in the Introduction, the number of buildings that are being used in archetype
studies continues to increase (as high as on the order of 103). By calling the encapsulated package
in parallel, multiple building cases can be simultaneously evaluated, which greatly improves the
efficiency. Lastly, while the algorithms and class definitions in the current version of AutoSDA
are developed for SMRFs, the workflow and structure can be adopted to incorporate other types

54
of structural systems such as reinforced-concrete moment frames.
3.7 Summary
This paper presents a Python-based platform that automates the seismic design, nonlinear
structural model generation, and response simulation of steel special moment resisting frames
(SMRFs). The first module of the automatic seismic analysis and design (AutoSDA) platform
takes building configuration, loads, and site parameters as input and outputs SMRF designs that
comply with the latest building code provisions while accounting for ease of construction. A
second module constructs two-dimensional nonlinear structural models in OpenSees based on the
generated designs and performs nonlinear static and dynamic analyses towards a comprehensive
evaluation of seismic performance. The efficiency, reliability, and accuracy of the AutoSDA
platform are demonstrated using several illustrative examples. The modular framework object
orientated programming structure makes the platform easily adaptable. Potential future
enhancements include the use of alternative strategies to account for beam-column material
nonlinearity, 3D modeling and economic loss assessment. The broad implication of the AutoSDA
platform is a drastic reduction in the time and effort involved in performance-based seismic design.
Moreover, it can be used to develop a database of archetype steel moment frame buildings towards
the development of analytics-driven design methodologies. It is worth noting that the development
details (e.g., platform structure and algorithm) documented in this paper can be used to create
similar platforms for other types of structural systems. A key limitation of the current version of
the AutoSDA platform is that it only allows the design of SMRFs using the equivalent lateral force
method. This limitation can be addressed by adding a feature that generates designs using the
results from response spectrum and/or response history analyses. Some other limitations include
the lack of column splice and foundation design, and the inclusion of a graphical user interface, all

55
of which could be easily incorporated in future versions. This platform has been implemented as
a part of EE-UQ (Earthquake Engineering with Uncertainty Quantification) framework developed
as part of the National Science Foundation Natural Hazards Engineering Research Infrastructure
(NHERI) SimCenter.

56
4. A Database of Seismic Design, Nonlinear Models, and Seismic
Responses for SMRF Buildings
This chapter is adopted from the following study:
Guan, X., Burton, H., & Shokrabadi, M. (2020). A database of seismic designs, nonlinear
models, and seismic responses for steel moment-resisting frame buildings. Earthquake Spectra,
8755293020971209.
4.1 Introduction
Estimating structural seismic response is fundamental to the second generation
performance-based earthquake engineering (PBEE) assessments [4]. Generally, conducting
nonlinear response history analysis (NRHA) is the most reliable approach to estimate the seismic
structural responses. However, in some cases, the effort associated with detailed modeling and
analysis may not be warranted or feasible. For example, when the second generation PBEE method
is used to assess regional seismic impacts, performing NRHAs for tens, hundreds of thousands, or
even millions of buildings may be impractical. In such a situation, a simplified process that
provides rapid and reasonable estimates of seismic demands is needed.
A number of simplified methodologies have been developed to estimate seismic drift
demands in buildings [4,47,63–67]. While these methods have greatly enhanced our ability to
rapidly estimate structural response demands, one common limitation is that they were validated
or tested on relatively small datasets (e.g., three to five buildings subjected to five to twenty ground
motions). Currently, the most widely used dataset for steel moment resisting frames (SMRFs) is
the one developed for the SAC (the Structural Engineers Association of California, the Applied
Technology Council, and Consortium of Universities for Research in Earthquake Engineering)
steel project. The dataset includes three-story four-bay, nine-story five-bay, and twenty-story five-

57
bay buildings, which were designed as standard office buildings located on stiff soil in three
regions with different seismicity (Los Angeles, Seattle, and Boston). More recently, Elkady and
Lignos [68] released a dataset that includes four archetype steel buildings designed with perimeter
SMRFs with their corresponding nonlinear structural models. However, the number of buildings
included in the aforementioned two datasets (three and four) is insufficient to support the
development and evaluation of seismic demand estimation methods. A larger dataset comprised
of 222 buildings with different types of lateral force resisting systems (LFRS’s) was assembled by
Esteghamati et al. [69] and made public through the DesignSafe cyberinfrastructure [70]. This
dataset contains the fragility parameters from the relevant literature, but it does not provide specific
building design details or structural models.
An ideal dataset should include a large number of building cases that reflect the variations
of key structural characteristics (e.g., number of stories, number of bays, bay widths, story heights,
and magnitude of dead loads) adopted in practice. To create such dataset, the archetype concept is
necessary. A typical starting point for archetype studies is to create a design space by identifying
the variables that affect seismic performance and establish the bounds for each one. Next, each
representative archetype building is designed to comply with the relevant building code(s) and
standard(s). Based on the building designs, nonlinear structural models are constructed, and
seismic responses are obtained through dynamic analyses.
This paper introduces the development of a comprehensive database of 621 SMRFs
designed using modern codes and standards, along with the corresponding nonlinear structural
models, and associated seismic responses (i.e., peak story drifts, peak floor accelerations, and
residual story drifts). It also includes the seismic responses for a subgroup of 100 SMRFs subjected
to three sets of site-specific ground motions (with 40 records each) selected based the service-level

58
earthquake (SLE), design-based earthquake (DBE), and maximum considered earthquake (MCE).
The remainder of the paper begins by introducing the computational platform used to generate the
database. Then the archetype design space, individual structural designs, the adopted nonlinear
modeling ground motion selection procedures, and post-processed nonlinear responses are
presented. The limitations and possible extensions of the current database are also discussed. The
database has been utilized by the authors (in a separate study) to evaluate the performance of
existing methods and develop new data-driven and hybrid (mechanics-based + data-driven)
models for estimating seismic structural demands. The database can also be used in the
development and implementation of performance-based analytics-driven seismic design
methodologies [5].
4.2 Database of SMRF Designs, Nonlinear Models, and Seismic Responses
Figure 4.1 presents an overview of the database, which is comprised of four modules. The
“code-conforming seismic design” module includes the design details for 621 SMRFs with various
geometric configurations and loads. The “ground motion” module consists of the 240 records
assembled by Miranda [71] and three groups of site-specific records (with 40 records each)
selected based on the SLE, DBE, and MCE hazard levels. The “nonlinear structural model” module
includes the 621 two-dimensional (2D) numerical models constructed in OpenSees [2], that are set
up to perform both static and dynamic analyses. The last module, which is entitled “EDPs from
NRHAs”, includes the engineering demand parameters (EDPs) for the 621 SMRFs subjected to
the 240 ground motions. The EDPs for a subgroup of 100 SMRFs subjected to the aforementioned
three groups of site-specific ground motions are also included in the last module.

59
Figure 4.1 Overview of the database
4.2.1 Design Tool for Generating the Database
To create a comprehensive database, a Python-based platform that is able to automate the
seismic design, nonlinear structural model construction, and response analyses of SMRFs is
developed. The Automated Seismic Design and Analysis (AutoSDA) platform is based on the
object-oriented programing paradigm and has three modules, as shown in Figure 4.2. The “code-
conforming seismic design” module receives building geometry, load, and site parameters as input
and generates the member sizes. The “nonlinear structural model construction” sub-module (takes
the design information and constructs two dimensional (2D) numerical models in OpenSees. The
“nonlinear static and dynamic analysis” sub-module automates the structural response analyses.
The ground motion records used in the dynamic analysis are selected using a stand-alone Python

60
program. The program takes in a target response spectrum and standard deviation as input and
selects a set of ground motions from the PEER NGA-WEST2 database [62] whose median
spectrum and associated standard deviation reasonably match the target over a period range of 0.01
sec to 10 sec [72]. The final module automatically post-processes the analysis results and gathers
the necessary outputs (e.g., base shears, floor displacements, peak story and roof drifts, peak floor
accelerations, and residual story drifts) from the nonlinear static/dynamic analyses, which are
stored in a set of .csv files and used to visualize the corresponding pushover curves, story drift and
floor acceleration profiles, and fragility curves. The reliability of the AutoSDA platform was
evaluated by comparing its design results with those generated by industry structural engineers
and other researchers. Additional details about the AutoSDA computational platform can be found
in Chapter 3.
Figure 4.2 Overview of AutoSDA modules

61
4.2.2 Seismic Designs for Archetype SMRFs
4.2.2.1 Establishing the Archetype Design Space
To explore the space of SRMF archetypes, the parameters known to significantly affect
their seismic design and/or performance are first identified. Then, lower and upper bound values
are defined based on the allowable limits specified in the building code and/or the standard of
practice. Table 4.1 summarizes those parameters based on four categories: building geometric
configuration (number of stories, number of bays, the ratio of first story to typical story height,
bay width, number of LFRS’s, and typical story height), load information (including floor and roof
dead loads), allowable drift limit, and steel material strength (namely yield stress).
Table 4.1 Parameters considered in developing the SMRF archetypes and their associated ranges
Category Parameters Values considered in archetype design Space
Geometric
configuration
Number of stories (𝑁𝑠) 1, 5, 9, 14, and 19
Number of bays (𝑁𝑏) 1, 3, and 5
First story/typical story height
(ℎ1 ℎ𝑡⁄ ) 1.0, 1.5, and 2.0
Bay width (𝑊𝑏) 20 ft (6.10 m), 30 ft (9.14 m), and 40 ft (12.19 m)
Number of LFRS’s (𝑁𝐿) Two in principal direction
Typical story height (ℎ𝑡) 13 ft (3.96 m)
Load information
Floor dead load (𝐷𝐿𝑓𝑙𝑜𝑜𝑟) 50 psf (2.39 kN/m2), 80 psf (3.83 kN/m2), and
110 psf (5.27 kN/m2)
Roof dead load (𝐷𝐿𝑟𝑜𝑜𝑓) 20 psf (0.96 kN/m2), 67.5 psf (3.23 kN/m2), and
115 psf (5.51 kN/m2)
Floor live load (L𝐿𝑓𝑙𝑜𝑜𝑟) 50 psf (2.39 kN/m2)
Roof live load (𝐿𝐿𝑟𝑜𝑜𝑓) 20 psf (0.96 kN/m2)
Design conservatism Allowable drift limit (𝜃) 2%
Steel strength Yield stress (𝐹𝑦) 50 ksi (345 MPa)
Based on a review of industry-generated SMRF designs [48] and consultation with
Englekirk Structural Engineers (https://www.englekirk.com), buildings with 1 to 20 stories, 1 to
5 bays, ratios of first story to typical story heights ranging from 1 to 2, and 20 ft (6.10 m) to 40 ft
(12.19 m) bay widths are considered. The number of SMRFs in each principal direction is fixed to

62
two, which is consistent with typical U.S. practice. The lower bound floor dead load is taken as 50
psf (2.39 kN/m2) and the upper bound is 110 psf (5.27 kN/m2), in accordance with scenarios using
light weight and normal weight concrete, respectively. The lower and upper bound for the roof
dead load are set as 20 psf (2.39 kN/m2) and 115 psf (5.27 kN/m2), respectively. The former refers
to the case using only a steel deck and the latter represents the scenario using a steel deck with
normal weight concrete for the roof. The allowable drift limit is taken as 2%, which is the default
value specified in Table 12.12-1 of ASCE 7-16 [30]. The yield stress for steel is 50 ksi (345 MPa),
which is commonly adopted in United States practice. Based on the information summarized in
Table 4.1, considering every combination of the considered parameter values would result in 1215
archetypical designs. As detailed later in the paper, approximately half of these are excluded,
because the parameter combinations result in unrealistic or unfeasible designs.
4.2.2.2 Seismic Design for SMRFs in Archetype Buildings
To represent buildings in a high seismicity zone, the archetypes are designed based on a
location in Los Angeles, California with site class D and associated spectral acceleration values of
Ss = 2.25 g and S1 = 0.6 g. These site conditions are consistent with what was used in the ATC 123
Project [48]. The DBE and MCE spectra for the site are shown in Figure 4.3. The periods of the
archetype buildings, which are calculated using the equation specified in ASCE 7-16 Chapter 12
[30], range from approximately 0.3 sec to 3.5 sec, and the associated design Sa(T1) values range
from 0.17g and 1.5g. The typical structural framing layout of the archetypical buildings is selected
to be same as the one adopted in the ATC 123 Project. As shown in Figure 4.4, the building has
the same length and width, and has two perimeter SMRFs as its LFRS in each principal direction.
All other parameters relevant to the seismic structural design are listed in Table 4.1. While the site
condition and structural framing layout are fixed, sites with different spectral parameters and

63
buildings with different plan layouts could be added to future versions of the database.
Figure 4.3 ASCE 7-16 DBE and MCE spectra at the considered site
(a)
(b)
(c)
Figure 4.4 Typical structural framing plan layout for archetype buildings: (a) one-bay, (b) three-
bay, and (c) five-bay SMRFs as the LFRS
North

64
For each archetype building, the SMRFs are designed using the AutoSDA platform, which
uses the equivalent lateral force (ELF) method specified in ASCE 7-16 [30]. The input parameters
for the seismic design include the building geometry (number of stories, number of bays, story
heights, bay widths, and the number of SMRFs in each principal direction), loads (dead and live
loads on each floor), site conditions (mapped spectral acceleration parameters and site class), and
the parameters used in the ELF procedure (response modification coefficient, importance factor,
deflection amplification factor, redundancy factor, and parameters used to estimate fundamental
period). The design results include the section sizes for beams and interior/exterior columns,
design story drifts, reduced-beam section (RBS) dimensions, panel zone thicknesses, strong-
column-weak-beam (SCWB) ratios, and strength demand-to-capacity ratios for all the components.
The design results also include the modal information, including the first through fourth modal
periods and associated modal shapes. All inputs and design results are stored in a set of .csv files.
Not all of the archetype buildings produced a valid design solution. For example, a 19-
story building with two one-bay SMRFs in each principal direction is not realistic or practical.
Among the 1215 archetypical buildings, 621 produced reasonable code-conforming designs,
including 81 one-story, 162 five-story, 162 nine-story, 128 fourteen-story, and 88 nineteen-story
SMRFs. The section properties of different members (including beam, exterior column, and
interior column) and design story drift are plotted against the story level, as shown in Figure 4.5
to Figure 4.9. The statistical distribution of the section properties in each story are presented using
a boxplot. The outermost short bars represent the smallest and largest section properties, excluding
any “outliers”, respectively. The inner lines in the rectangle represent the 25th, 50th, and 75th
percentiles. The “outliers”, which are not included between the two outermost bars, represent the
design cases for buildings either with extreme and/or atypical design parameter combinations (e.g.,

65
large first-story-to-upper-story-height ratios and dead loads, large number of bays and small dead
loads, etc.). Additionally, the median of the design story drifts for all buildings are approximately
uniformly distributed along the building height and within the code limit, indicating efficient
designs. To further examine this issue, the drift concentration factor
( DCF max story drift average story drift= ) for each design is computed and visualized in Figure
4.10. While some designs have high DCF values, more than 90% are less than 1.4. Note that the
uniformity of the drift profile as measured by the DCF has to be balanced against the
constructability constraints.
(a)
(b)
(c)
(d)
Figure 4.5 Visualizing the designs for the 81 one-story SMRFs: (a) moment of inertia for beams,
(b) moment of inertia for exterior columns, (c) moment of inertia for interior columns, and (d)
design story drifts

66
(a)
(b)
(c)
(d)
Figure 4.6 Visualizing the designs for the 162 five-story SMRFs: (a) moment of inertia for
beams, (b) moment of inertia for exterior columns, (c) moment of inertia for interior columns,
and (d) design story drifts.

67
(a)
(b)
(c)
(d)
Figure 4.7 Visualizing the designs for the 162 nine-story SMRFs: (a) moment of inertia for
beams, (b) moment of inertia for exterior columns, (c) moment of inertia for interior columns,
and (d) design story drifts.

68
(a)
(b)
(c)
(d)
Figure 4.8 Visualizing the designs for the 128 fourteen-story SMRFs: (a) moment of inertia for
beams, (b) moment of inertia for exterior columns, (c) moment of inertia for interior columns,
and (d) design story drifts

69
(a)
(b)

70
(c)
(d)
Figure 4.9 Visualizing the designs for the 88 nineteen-story SMRFs: (a) moment of inertia for
beams, (b) moment of inertia for exterior columns, (c) moment of inertia for interior columns,
and (d) design story drifts
71
(a)
(b)
Figure 4.10 Distribution of drift concentration factors for all 621 SMRFs: (a) boxplots for
buildings with different number of stories and (b) histogram of drift concentration factors
4.2.3 Ready-to-Run Nonlinear Structural Models
Two-dimensional nonlinear structural models of the 621 SMRFs are constructed in
OpenSees. Further details regarding the modeling technique of SMRFs can be found in Chapter 2.
4.2.4 Earthquake Ground Motions
Two batches of earthquake ground motions are selected for the current version of database.
The first batch includes the 240 acceleration histories reported by Miranda [71] that were recorded
during 12 earthquakes that occurred in California. They are generally representative of ground
motions in high seismicity zones. All records are from rock or firm sites with average shear-wave
velocities higher than 600 ft/sec (180 m/sec) in the upper 100 ft (30 m) of the site profile.
Additionally, these ground motions were recorded on free field stations or in the first floor of low-
rise buildings with negligible soil-structure interaction effects. The earthquake magnitudes that
generated these records range from M6.0 to M7.0 with an average of M6.7. The peak ground
acceleration for the record set varies from 0.03 g to 0.61 g. More detailed information about these
240 ground motion records can be found in Miranda [71]. The individual and median acceleration
spectra for the set are presented in Figure 4.11.

72
Figure 4.11 Acceleration spectra for the 240 ground motion records
The second batch of ground motions includes three record-sets obtained from a site-
specific selection procedure [72] at three hazard levels: SLE, DBE and MCE, which correspond
to return periods of approximately 43 years, 475 years and 2475 years, respectively. Each group
consists of three suites of records (with 40 in each), which are selected for buildings with periods
of approximately 0.5 sec, 1.0 sec, and 2.0 sec, respectively, from the PEER NGA-WEST2 database
[62].
The first step in selecting each record set is to calculate the average characteristics of the
events that have return periods similar to the target return period. These characteristics include the
magnitude, distance, and spectral shape parameter (ε) of the seismic events with the target return
period, which are calculated using the United States Geologic Survey’s (USGS) seismic hazard
deaggregation tool (https://earthquake.usgs.gov/hazards/designmaps) based on the corresponding
site. As noted earlier, the archetype buildings are assumed to be located at a high-seismicity site
in Los Angeles (34.008°N, 118.152°W). The outcomes of the seismic hazard deaggregation
depend on the period of the structure being considered. Given the diversity of the archetype design

73
space, their periods vary within a range of 0.30 sec to 3.0 sec. To keep the computational effort
associated with the seismic hazard deaggregation and record selection steps tractable, three typical
periods of 0.5 sec, 1.0 sec, and 2.0 sec are selected to represent the entire range of the periods for
the archetype buildings.
Once the seismic hazard deaggregation for each of the three representative periods is
complete, the mean characteristics of the seismic events are then used as inputs in the ground
motion model developed by Campbell and Bozorgnia [73], which provides a target horizontal
response spectrum and its associated standard deviations over a period range of 0.01 sec to 10.0
sec. These target spectra and associated standard deviations are used as the inputs into the ground
motion selection algorithm [72], which searches the PEER NGA-WEST2 database and selects the
desired number of records (40 in this study) that provide a good match with the target values. The
record selection tool uses the greedy ground motion selection algorithm developed by Jayaram et
al. [72]. The acceleration response spectra of the selected records at three hazard levels based on
periods of 0.5 sec, 1.0 sec, and 2.0 sec, are presented in Figure 4.12 to Figure 4.14.
Since the current version of the database is primarily developed to evaluate the structural
responses of the SMRFs and not collapse performance, no scaling of the selected ground motions
is performed.

74
(a)
(b)
(c)
Figure 4.12 Ground motion response spectra at the SLE hazard level for the following
representative periods: (a) 0.5 sec, (b) 1.0 sec, and (c) 2.0 sec

75
(a)
(b)
(c)
Figure 4.13 Ground motion response spectra at the DBE hazard level for the following
representative periods: (a) 0.5 sec, (b) 1.0 sec, and (c) 2.0 sec

76
(a)
(b)
(c)
Figure 4.14 Ground motion response spectra at the MCE hazard level for the following
representative periods: (a) 0.5 sec, (b) 1.0 sec, and (c) 2.0 secs
4.2.5 Nonlinear Responses of SMRFs
Two sub-datasets are included for the nonlinear responses. The first stores the structural
responses of the 621 SMRFs subjected to 240 ground motions, resulting in 621 × 240 = 149,040
peak story drift profiles, peak floor acceleration profiles, and residual story drift profiles. The other
contains the responses of a subgroup of 100 SMRFs (including 13 one-story, 26 five-story, 26
nine-story, 21 fourteen-story, and 14 nineteen-story buildings) subjected to three groups of site-
specific ground motions (with 40 ground motions in each group) at the SLE, DBE, and MCE levels.
This subset includes 12,000 peak story drift profiles, peak floor accelerations, and residual story

77
drift profiles. All response profiles are stored in .csv files as two-dimensional arrays (matrices).
Examples of story drift, peak floor acceleration, and residual story drift profiles for specific
archetypes subjected to a set of 40 MCE level ground motions are shown in Figure 4.15 to Figure
4.19. At this hazard level, the story drift demands for all archetypes and ground motions range
from 0.2% to 10% with medians between 1% and 2%. The medians of the residual story drift
demand for all archetypes are all less than 0.2%, which is less than the demolition drift limit of 1%
suggested by FEMA P-58 [4]. Moreover, the medians of the peak floor accelerations are within
the range of 0.5 g to 1.0 g.
(a)
(b)
(c)
Figure 4.15 Structural responses for a typical one-story building subjected to 40 MCE level
ground motions: (a) peak story drift, (b) peak floor acceleration, and (c) residual story drift
profiles
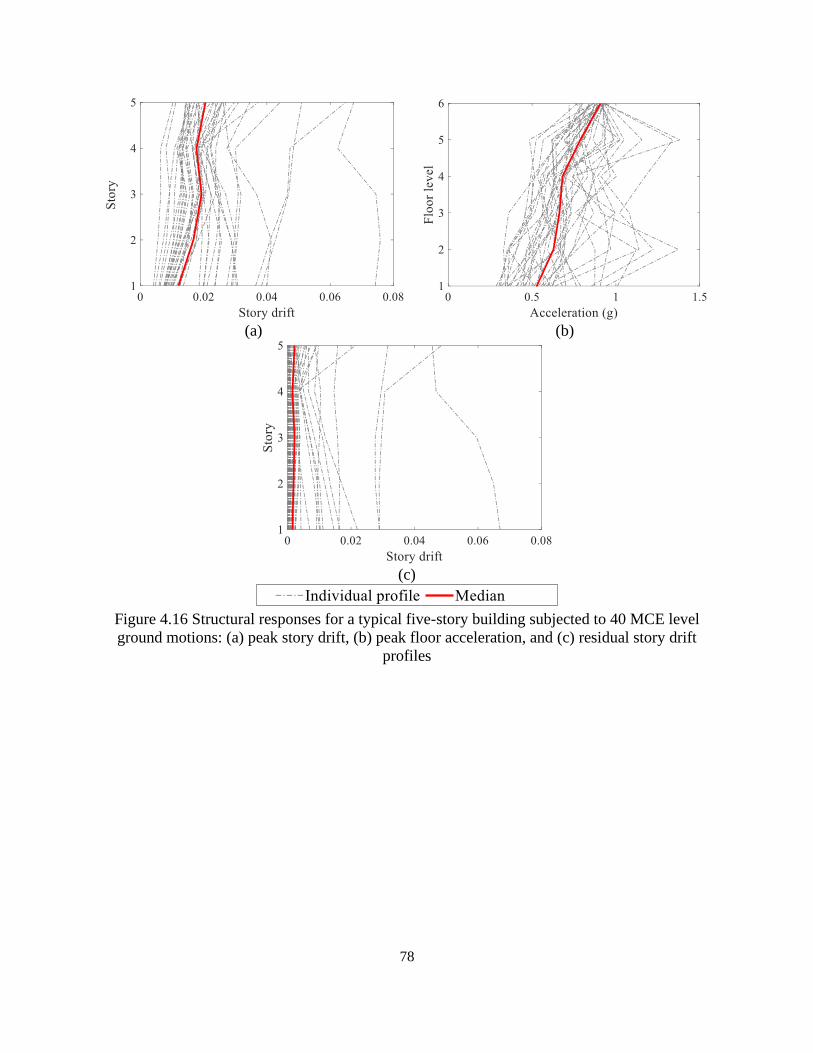
78
(a)
(b)
(c)
Figure 4.16 Structural responses for a typical five-story building subjected to 40 MCE level
ground motions: (a) peak story drift, (b) peak floor acceleration, and (c) residual story drift
profiles

79
(a)
(b)
(c)
Figure 4.17 Structural responses for a typical nine-story building subjected to 40 MCE-level
ground motions: (a) peak story drift, (b) peak floor acceleration, and (c) residual story drift
profiles

80
(a)
(b)
(c)
Figure 4.18 Structural responses for a typical fourteen-story building subjected to 40 MCE level
ground motions: (a) peak story drift, (b) peak floor acceleration, and (c) residual story drift
profiles

81
(a)
(b)
(c)
Figure 4.19 Structural responses for a typical nineteen-story building subjected to 40 MCE level
ground motions: (a) peak story drift, (b) peak floor acceleration, and (c) residual story drift
profiles
4.3 Structure of the Data
The dataset is stored in five separate folders which are named BuildingDesigns,
ElasticModels, NonlinearStructuralModels, GroundMotions and StructuralResponses. In each of
the first three folders, the relevant data for each building is stored in a subfolder which is named
based on the building ID. In the GroundMotions folder, the two batches of record-sets (as described
in Section 4.2.4) are stored in subfolders. In the StructuralResponses folder, there are two
subfolders named EDPsUnder240GMs and EDPsUnderSiteSpecificGMs. The former contains the
82
EDPs (including peak story drifts, peak floor accelerations, and residual story drifts) of the 621
SMRFs subjected to the 240 ground motions assembled by Miranda [71] and the latter includes
the EDPs corresponding to the subgroup of 100 SMRFs subjected to three site-specific ground
motions selected based on the SLE, DBE, and MCE hazard levels.
The database consists of five components (each placed in a separate folder), including the
special steel moment resisting frame (SMRF) designs, their corresponding elastic and nonlinear
structural models, the ground motion record sets used for analyses, and the post-processed seismic
responses. As indicated in Table 4.2, the seismic design dataset includes the building ID, geometry,
load information, site condition, ELF parameters, and OpenSees models used for the elastic
analysis, modal information, member sizes, doubler plate thicknesses, design demand-to-capacity
ratios for each member, and design story drifts. The ground motion dataset includes the meta-data
for each ground motion record (including a unique sequence number which is used to identify the
record in the PEER NGA-WEST2 database [62], time step, and number of data points for each
record) and acceleration time series. The nonlinear structural model dataset includes a set of .tcl
files, which could be complied by OpenSees for nonlinear static and dynamic analyses for the
buildings provided in the seismic design set. The nonlinear structural response dataset includes the
peak story drifts, peak floor accelerations, and residual story drifts for all designed buildings
subjected to the selected ground motions. The primary identifier for the seismic designs and
nonlinear structural models is the Building ID, which is associated with each building design
and/or model. The primary identifier for the ground motions is the Record sequence number. The
Building ID coupled with the Record sequence number forms the identifier for the dataset of
nonlinear structural responses.
83
4.4 Summary and Possible Future Extensions
This database is created using the archetype concept, which groups buildings with similar
geometric configurations and/or structural properties into representative sets, resulting in
generalized performance predictions for a full class of buildings [74]. The values of the parameters
considered in the archetype design space are determined based on the standard of structural
engineering practice. As a result, the database is representative of actual SMRFs located in a high
seismicity zones. In addition, practitioners from Englekirk Structural Engineers
(https://www.englekirk.com) have been involved in the development of the database, which
ensures that the designs are realistic. All datasets are stored as .csv files, which could be retrieved
based on a specific building ID. This allows the user/program to easily access the data. The
database [54] has been made publicly available through the DesignSafe cyberinfrastructure.
The database established in this study could be potentially utilized for a wide range of
purposes. For example, it could be used to identify the influence of various design parameters on
the seismic performance of SMRFs, assess the accuracy and reliability of existing seismic demand
prediction approaches, develop data-driven models for predicting seismic demands, and formulate
methods to explore optimal designs based on a predefined set of constraints.
One limitation of the current database is that the SMRF designs are based on a single set
of seismicity parameters (Ss = 2.25 g, S1 = 0.6 g, and stie class D). To make it more comprehensive,
buildings with different seismicity parameters should be added. This extension could be easily
achieved by changing the design input parameters relevant to the site condition and generating
new seismic designs and nonlinear models using the Python-based platform. Additionally, bi-
directional effects were not considered in the design of corner columns. Another limitation is that
the nonlinear response of the beam-column elements is simulated using concentrated plasticity

84
models with a Rayleigh damping ratio of 2%. Future versions could be extended to include other
modeling techniques, such as elements with fiber sections and/or finite length plastic hinge models,
and different damping assumptions.
The fact that the nonlinear models provided in this database do not capture local or global
buckling and axial shortening is noteworthy. Recent experimental findings [7,75] suggest that deep
wide-flange columns tend to experience axial shortening due to the local or global buckling, which
might affect the seismic response of SMRFs. This axial shortening phenomena cannot be simulated
using concentrated plasticity or fiber section models.
Table 4.2 Overview of attributes and associated descriptions
Dataset Attribute Property Description Unit
Seismic
design
Building ID \ A unique ID to identify the building unitless
Geometry
Number of stories An integer to denote the number of stories unitless
Number of bays An integer to denote the number of bays unitless
First story height A floating point number for the first story
height foot
Typical story
height
A floating point number for the typical story
height foot
Bay width A floating point number for the bay width foot
Number of LFRS's An integer for the number of LFRS's in each
principal direction unitless
Load
Floor weight A list of floating point numbers for the seismic
weight for each floor kip
Floor dead load A list of floating point numbers for the dead
load on each floor psf
Floor live load A list of floating point numbers for the live load
on each floor psf
Beam dead load A list of floating point numbers for the uniform
beam dead loads lb/ft
Beam live load A list of floating point numbers for the uniform
live loads on beam lb/ft
Leaning column
dead load
A list of floating point numbers for the dead
load on the leaning column kip
Leaning column
live load
A list of floating point numbers for the the live
load on the leaning column kip
Site
condition Ss
A floating point number for the short period
spectral response acceleration parameter g

85
S1 A floating point number for the 1 sec spectral
response acceleration parameter g
Site class An English letter to denote site class unitless
Parameters
relating to
ELF method
Cd A floating point number for the deflection
amplification factor
unitless
R A floating point number for the response
modification coefficient
I A floating point number for the importance
factor
ρ A floating point number for the redundancy
factor
Fa Two floating point numbers for the site
coefficient parameters Fv
Cu Three floating point numbers for the parameters
used to estimate the building period Ct
x
Modal
information
Modal periods A list of four floating point numbers of the 1st -
4th modal periods sec
Modal shapes A list of four vectors for the 1st - 4th modal
shapes unitless
Member
sizes
Beam A list of strings to denote the section sizes for
the beams, exterior columns, and interior
columns
unitless
Exterior column
Interior column
Design drifts \
A list of floating point numbers for the story
drifts under the design lateral forces (from
ELF)
Demand to
capacity
(DC) ratio
Beam shear DC
ratio
A two-dimensional array (matrix) with the DC
ratio for each beam/column subjected to
different loading conditions
Beam flexural DC
ratio
Column axial DC
ratio
Column shear DC
ratio
Column flexural
DC ratio
SCWB ratio \ A two-dimensional array (matrix) with the
SCWB ratio for each joint connection
Doubler plate
thickness \
A two-dimensional array (matrix) with the
thickness of the doubler plate at each joint inch
Elastic
Model \ \
A set of OpenSees .tcl files used for the elastic
analysis \
Ground
motion
Brief
information
Record sequence
number
A unique ID to denote the ground motion
record in the PEER NGA-WEST2 database unitless

86
Time step A floating point number for the time increment
in the time series sec
Number of time
points
An integer for the number of data points in the
time series unitless
Time series \ A list of floating point numbers for the
acceleration at each time step g
Nonlinear
structural
model
Nonlinear
model \
A set of OpenSees .tcl files used for nonlinear
analysis \
Nonlinear
structural
response
Peak story
drift \
A list of floating point numbers to denote the
seismic demands at each story/floor
unitless
Peak floor
acceleration \ inch/sec2
Residual
story drift \ unitless

87
5. Comparative Study for Steel Moment Resisting Frames Using
Post-Tensioned and Reduced-Beam Section Connections
This chapter is adopted from the following study:
Guan, X., Burton, H., & Moradi, S. (2018). Seismic performance of a self-centering steel
moment frame building: from component-level modeling to economic loss assessment. Journal of
Constructional Steel Research, 150, 129-140.
5.1 Introduction
In current seismic design codes, structures are designed to achieve a minimum level of
collapse safety by assuring ductile response during earthquake loading. As a result, conventional
steel structures may undergo permanent (or residual) deformations after a seismic event.
Mitigation of residual displacements in steel buildings is a critical issue as it directly relates to the
repair cost. In fact, large permanent deformations can render a building irreparable. For example,
because of excessive residual drifts, many buildings surviving the 2011 Christchurch earthquake
were declared unusable. The reconstruction cost for these buildings was estimated to be 40 billion
New Zealand dollars [76].
With the goal of minimizing residual deformations, researchers have been investigating the
application of alternative materials such as shape memory alloys [37,77,78]. However, the
widespread application of these new systems has been impeded by their high cost and the need for
new construction techniques and structural systems. To meet this challenge, post-tensioned (PT)
moment frame connections with top-and-seat angles have been proposed as an efficient approach
to reduce residual deformations in steel buildings [79,80]. Several experimental (e.g., [81]),
analytical (e.g., [40,81]), and numerical (e.g., [82–85]) studies have been conducted to evaluate
the behavior and potential advantages of PT connections. Figure 5.1 shows a reduced beam section

88
(RBS) welded moment connection and a PT beam-column connection with top-and-seat angles.
PT strands are used in the latter to provide restoring forces or self-centering (SC) capability, while
the top-and-seat angles are used to dissipate energy. Other types of energy dissipation mechanisms
such as viscous dampers [36] have also been used. As a result, structural damage in the connection
is localized at the angles, which can be easily replaced following an earthquake.
(a)
(b)
Figure 5.1 Schematic illustration of an (a) RBS welded connection and (b) PT connection
To assess the advantages of using self-centering moment resisting frames (SC-MRFs) with
PT connections, their seismic performance and potential cost-benefit should be studied. To achieve
this goal, a reliable modeling technique that captures the collapse behavior of SC-MRFs with PT
connections is needed. However, the existing modeling approaches are limited to PT connections
with other types of energy dissipation devices, such as web hourglass shape pins [35], friction
devices [86], and passive dampers [36]. Therefore, there is a need to develop a reliable, practical
and simplified modeling technique for PT connections with top-and-seat angles, which can be used
to predict the structural response of SC-MRFs subjected to earthquake loading.
In addition to the structural response, assessing earthquake-induced building economic
losses can also be used to quantitatively evaluate the advantages of SC-MRFs. Currently, several
Beam
Weld
Bolt
Column
Reduced Beam Section
Angle Beam
PT Strands
Reinforcing Plate
Column

89
methods are available to assess earthquake-induced losses of buildings. Porter et al. [87] proposed
an approach that involves conducting nonlinear dynamic analyses, prediction of damage at the
component level using fragility functions, and estimation of total building repair cost. The
approach was further enhanced as part of the second-generation performance-based earthquake
engineering (PBEE) methodology [88]. As part of the overall PBEE framework, Ramirez and
Miranda [39] demonstrated that the excessive residual drifts significantly influence earthquake-
induced building losses. A comprehensive description of the state-of-the-art methodology for
earthquake-induced economic loss estimation is described in FEMA P-58 [4]. This methodology
uses 2nd generation PBEE along with a complete database of damage fragility loss functions for
structural and nonstructural components and considers the influence of residual drifts.
In this study, a phenomenological model of top-and-seated angle PT connections is
developed in OpenSees [2] and is subsequently verified using prior experiments. A prototype
building, which has SC-MRFs as its lateral force resisting system, is selected. Using the proposed
phenomenological model of the PT connection, a 2D model for the SC-MRF is constructed. To
facilitate a comparative assessment, a welded moment resisting frame (WMRF) model, which has
the same member sizes as the SC-MRF but with RBS connections, is created. Nonlinear static and
dynamic analyses are performed on both the SC-MRF and WMRF models and their collapse
performance is quantified. Finally, the economic seismic losses for both buildings are assessed
using the FEMA P-58 methodology, which accounts for the influence of residual drifts and the
repair costs of structural and nonstructural components. Figure 5.2 illustrates the workflow of the
study.

90
Figure 5.2 Overview of study
5.2 Model Development in OpenSees
5.2.1 Description of Prototype Building
A 6-story office building with 6 bays in the E-W and N-S directions, which has been
developed by Garlock et al. [89], is selected as the prototype building in this study. The building
is located in the Los Angeles metropolitan area and has two identical MRFs to resist lateral loads
in each direction (Figure 5.3). A single MRF is considered for the current study. The frame is
designed as an SC-MRF with top-and-seat angle PT connections by Garlock et al. [89] using a ten-
step procedure. First, the equivalent lateral force (ELF) method is used to determine the seismic
story forces. The beam and column sections are then selected based on the ELF results and an
assumption regarding the relationship between the connection and beam moments. Subsequently,
an elastic analysis is performed to ensure that the story drift limit is satisfied. The force demands
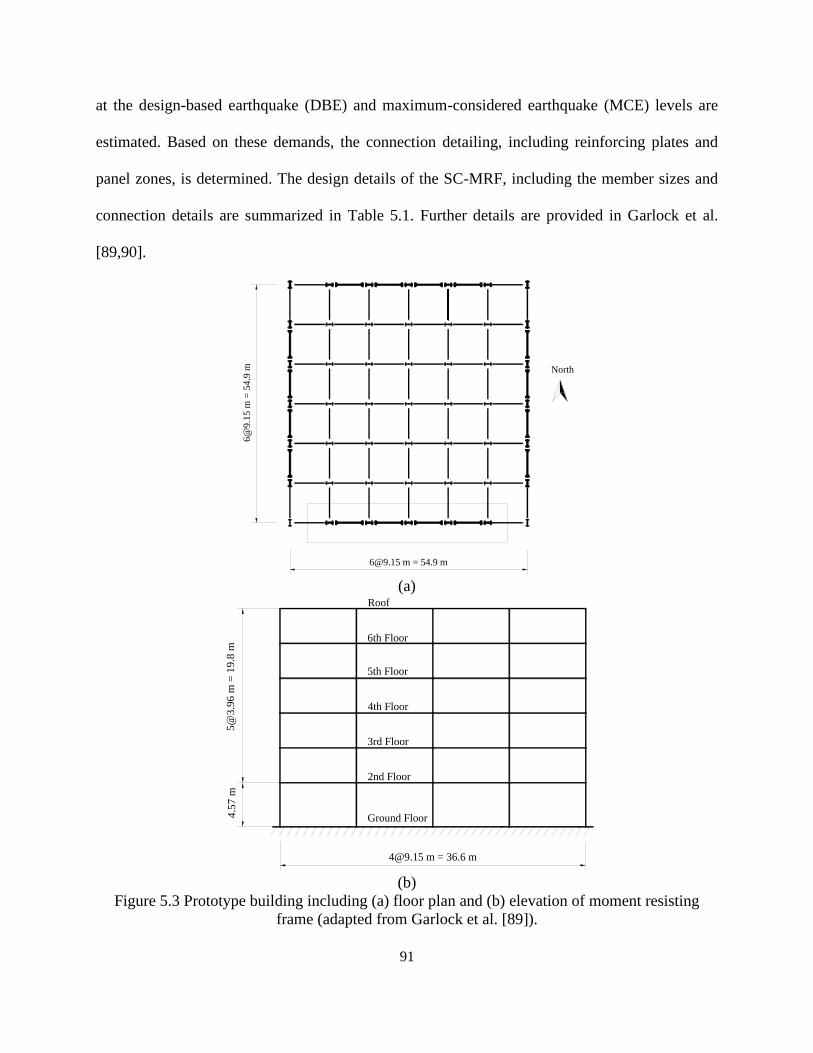
91
at the design-based earthquake (DBE) and maximum-considered earthquake (MCE) levels are
estimated. Based on these demands, the connection detailing, including reinforcing plates and
panel zones, is determined. The design details of the SC-MRF, including the member sizes and
connection details are summarized in Table 5.1. Further details are provided in Garlock et al.
[89,90].
(a)
(b)
Figure 5.3 Prototype building including (a) floor plan and (b) elevation of moment resisting
frame (adapted from Garlock et al. [89]).
[email protected] m = 54.9 m
6@
9.1
5 m
= 5
4.9
m North
[email protected] m = 36.6 m
4.5
7 m
Ground Floor
2nd Floor
3rd Floor
4th Floor
5th Floor
6th Floor
Roof
5@
3.9
6 m
= 1
9.8
m

92
Table 5.1 Design of prototype frames (adapted from Garlock et al. [90]).
Floor Beam* Column* Doubler plate
thickness (mm)
Number of
PT strands
Initial PT force per
strand (kN)
Roof W2476 W14211 6 16 1352
6th floor W30108 W14211 25 20 1779
5th floor W30108 W14311 13 20 1957
4th floor W36150 W14311 25 28 2366
3rd floor W36160 W14370 19 28 2865
2nd floor W36170 W14370 25 32 3131 * The designation is based on sections specified in AISC Steel Construction Manual [57]
5.2.2 Component-Level Modeling
5.2.2.1 Phenomenological Model of PT Connection
A phenomenological model of the PT connection is developed in OpenSees, as shown in
Figure 5.4. Two main components govern the moment-rotation response of the PT connection: the
PT strands and top-and-seat angles. The PT strands provide restoring forces whereas the angles
dissipate energy. Similarly, in the modeling process, two materials acting in parallel are defined:
Self-centering and Pinching4 materials. The Self-centering material was developed for application
in systems and components that exhibits a flag-shaped hysteretic response. Its monotonic response
envelope includes four segments: initial, post-activation, slip, and post-slip stages. A total of seven
parameters are required to define the material. Three stiffness parameters are used to define the
slope for the loading path. A force parameter and two deformation parameters are used to define
the points where the stiffness changes. The area enclosed by the hysteretic curve is controlled by
a unitless parameter. The slip and post-slip stages are not considered for the material used in this
study. More details on the Self-centering material can be found in Mazzoni et al. [91]. The response
envelope (positive and negative) of the Pinching4 material, which is multilinear and includes
degrading and constant-residual-strength branches, is defined by force and deformation parameters
at each point where there is a change in stiffness (a total of eight parameters). Each unload-reload
path is defined by six parameters, which includes the load-deformation point at which unloading
93
occurs and four other parameters defined by some fraction of the force and deformation at the
unloading point. Fourteen parameters are used to define the hysteretic damage rules. A parallel
material that includes the Self-centering and Pinching4 materials is assigned to a rotational spring,
which represents the hinge of the beam. Figure 5.5 shows schematic representations of the Self-
centering and Pinching4 response. For the Self-centering material (shown in Figure 5.5(a)), the
parameters k1 and k2 determine the initial and hardening stiffness. The force parameter sigAct
defines the yield point. The unitless parameter β governs the area enclosed by the hysteretic loop.
For the Pinching4 material (Figure 5.5(b)), the force parameters ePf1 through ePf4 and the
associated displacement parameters ePd1 through ePd4 define the envelop for the positive segment,
whereas the parameters eNf1 through eNf4 and eNd1 through eNd4 define the negative segment.
Additional details about these parameters can be found in the OpenSees manual [91]. The beams
and columns are modeled using elastic beam-column elements. The column hinge is modeled
using a rotational spring with the modified IMK material [24].

94
Figure 5.4 Model for an exterior PT connection with top-and-seat angles and associated column
and beam
(a)
(b)
Figure 5.5 Schematic force-deformation response for (a) Self-centering and (b) Pinching4
material parameters
5.2.2.2 Validation of the Proposed Phenomenological Model
To assess the effectiveness of the proposed phenomenological model in capturing the
cyclic response of PT connections, the analytical lateral load-displacement response is compared
to data from four experiments. Specimens PC2, PC3, and PC4 from Ricles et al. [80] and specimen
Elastic beam
column element
Modified IMK Model
Force
Deformation
OpenSees Node
Elastic beam
column element
Self-centering material
Deformation
Force
Pinching4 material
Deformation
Force
Deformation
Force
k1
k2sigAct ß×sigAct
Deformation
Force
(ePf 1, ePd1)
(ePf 2, ePd2)(ePf 3, ePd3)
(ePf 4, ePd4)
(eNf 1, eNd1)
(eNf 2, eNd2)
(eNf 3, eNd3)
(eNf 4, eNd4)

95
20s-18 from Garlock et al. [79], are selected for the model validation. The experiment setup is
shown in Figure 5.6. The load applied at the top of the column and the associated displacement
are used to verify the proposed model. The reported lengths and cross-section properties of the
beams and columns in the experiments are used for the analytical models. The parameters for the
Self-centering and Pinching4 materials and percentage contribution of each material, are
determined using an iterative process. The experimental cyclic loading protocol is applied to the
model and the material parameters are adjusted until a reasonable match is obtained between the
simulated and experimental hysteretic response. First, the relative contribution from the Self-
centering and Pinching4 materials is tuned. This has the largest influence on the extent to which
the hysteretic loop takes on a flag shape and is therefore directly related to the self-centering
capability of the structure. The parameters controlling the envelope of the hysteretic curve (k1, k2,
sigAct, ePf1-ePf4, eNf1-eNf4, ePd1-ePd4, and eNd1-eNd4) are then adjusted. Finally, the parameter
governing the area of hysteretic loop (β) is determined. Figure 5.7 shows that the analytical and
experimental responses are comparable for all four specimens. The material parameters for the
four specimens are listed in Table 5.2 and Table 5.3. The response of the SC-MRF connection is
assumed to be symmetric. Therefore, the positive and negative Pinching4 material parameters are
identical.

96
Figure 5.6 Experiment setup (adapted from Ricles et al. [80])
(a)
(b)
(c)
(d)
Figure 5.7 Comparison between the proposed model and experimental data for specimens (a)
PC2, (b) PC3, (c) PC4, and (d) 20s-18.
Beam
Column
Pin Support
Roller Support
Horizontal Cyclic Load

97
Table 5.2 Parameters of Self-centering material for four specimens
Specimen No.
Self-centering material Fraction in
parallel k1
(kN-m/rad)
k2
(kN-m/rad)
sigAct
(kN-m) β
PC2 2.00108 7.00106 2.30105 0.12 0.85
PC3 4.00108 7.10106 2.40105 0.27 0.85
PC4 2.00108 1.25107 2.50105 0.50 0.70
20s-18 3.501010 3.70107 1.20106 0.98 0.90
Table 5.3 Parameters of Pinching4 material for four specimens
Specimen
No.
Pinching4 Material Fraction
in
Parallel ePf1
(kN-m)
ePf2
(kN-m)
ePf3
(kN-m)
ePf4
(kN-m)
ePd1
(rad)
ePd2
(rad)
ePd3
(rad)
ePd4
(rad)
PC2 6.80105 9.00105 1.13106 1.00106 0.001 0.01 0.03 0.30 0.10
PC3 6.80105 9.00105 1.13106 1.00106 0.001 0.01 0.03 0.30 0.10
PC4 6.80105 9.00105 1.13106 1.00106 0.001 0.01 0.03 0.30 0.15
20s-18 6.80105 9.00105 1.13106 1.00106 0.001 0.01 0.03 0.30 0.10
5.2.2.3 Calibration of PT Connections in the Prototype Building
The response of the PT connections in the SC-MRF of the prototype building are
represented using the proposed phenomenological model. In the absence of experimental data on
the hysteretic response of PT connections of varied geometry and design specifications, the
surrogate models (predictive equations) developed by Moradi [92] are used to determine backbone
curve parameters for the PT beam-column connections of the prototype building. These parameters
include the initial stiffness (Ki), gap-opening point (do, Fo), residual (post gap-opening) stiffness
(Kres), and ultimate strength (Fmax) for PT connections. The surrogate models can predict the lateral
load-drift response and the limit state behavior of PT connections with top-and-seat angles. Six
input parameters are needed including the initial post-tensioning force, beam depth, beam flange
thickness and width, span length, and column length [93]. In developing the surrogate models to
predict the lateral response characteristics of the PT connections, the reference study [92]
considered several damage mechanisms, including beam local buckling, angle fracture, strand
yielding, and excessive yielding of tensile bolts. The surrogate models were generated using a

98
verified response surface methodology based on 33 PT connection models (simulation runs) that
were developed and analyzed in ANSYS.
In the current study, the ratio of post-peak slope to initial stiffness is set as -0.167, which
is determined based on the average value for post-peak slopes observed from the experimental
response [79]. The residual strength for the PT connection is assumed to be 40% of its maximum
strength as sufficient experimental data is not available yet. This assumption is the same for
conventional welded connections [23]. The complete backbone curve can be obtained with the
surrogate model parameters, post-peak slope, and residual strength. The PT connections in the
prototype building are then calibrated based on the generated backbone curves. Figure 5.8 shows
typical calibration results for the PT connection at the 2nd floor level of the SC-MRF. The detailed
parameters for all the PT connections are summarized in Table 5.4 and Table 5.5.
(a)
(b)
Figure 5.8 Calibration of PT connection model subjected to (a) monotonic and (b) cyclic loading

99
Table 5.4 Parameters for Self-centering material of PT connections
Floor No.
Self-centering material Fraction in
parallel k1
(kN-m/rad)
k2
(kN-m/rad)
sigAct
(kN-m) β
2 1.13106 1.13104 1.81103 0.75 0.8
3 1.13106 1.13104 1.81103 0.75 0.8
4 1.13106 1.13104 1.58103 0.75 0.8
5 1.58106 9.04103 1.36103 0.75 0.8
6 1.13106 6.78103 1.36103 0.75 0.8
Roof 1.13106 4.52103 5.62102 0.75 0.8
Table 5.5 Parameters for Pinching4 material of PT connections
Floor No.
Pinching4 Material Fraction
in
Parallel ePf1
(kN-m)
ePf2
(kN-m)
ePf3
(kN-m)
ePf4
(kN-m)
ePd1
(rad)
ePd2
(rad)
ePd3
(rad)
ePd4
(rad)
2 1.39102 3.39103 7.34103 -4.52103 810-4 0.010 0.030 0.070 0.2
3 1.36102 2.03103 4.75103 -5.31103 510-4 0.010 0.025 0.070 0.2
4 1.02102 1.69103 4.41103 -4.52103 510-4 0.010 0.027 0.065 0.2
5 5.08101 1.41103 3.28103 -3.50103 510-4 0.010 0.024 0.065 0.2
6 5.08101 1.38103 3.62103 -3.39103 510-4 0.010 0.026 0.070 0.2
Roof 2.54101 7.91102 1.98103 -1.58103 510-4 0.010 0.025 0.066 0.2
5.2.2.4 Comparison of Backbone Curves for Different Types of Connections
Figure 5.9 shows a typical comparison of the backbone curves for the PT top-and-seated
angle and RBS welded connections as well as the top-and-seated angle connection without PT.
The backbone curve of the top-and-seat angle connection without PT is provided here to
quantitatively illustrate the flexural strength contribution of the PT strands. All the connections
have the same beam and column sizes. The backbone curve for the welded connection is
determined using the equations reported in Lignos and Krawinkler [24]. The backbone curve for
the top-and-seat angle connections is determined based on prior tests on angles [94]. The
experiment provides a relationship between axial load and associated displacement, which is
converted to a moment-rotation relationship using the approach presented by Kishi and Chen [95].
It can be observed that the peak strength of the PT connection is 38% lower than that of the RBS
welded connection. On the other hand, the strength of the PT connection is significantly higher

100
than that of the top-and-seat angle connection without PT, which is due to the large contribution
of PT strands to the flexural strength.
Figure 5.9 A typical comparison of the backbone curve for three types of connections
5.2.3 Structural Modeling
Two-dimensional (2D) nonlinear structural models of the SC-MRF prototype building are
constructed in OpenSees [2]. The model is constructed using the PT connection models described
earlier including elastic beam-column elements for beams and columns, rotational springs with the
modified IMK model for the column hinges, and rotational springs with Self-centering and
Pinching4 materials in parallel for the beam hinges. A schematic view for the SC-MRF structural
model is presented in Figure 5.10. The panel zones are modeled using the approach developed by
Gupta and Krawinkler [28], which includes eight elastic beam-column elements with very high
axial and flexural rigidity as the boundary elements for the panel zone and a trilinear rotational
spring in one of the four corners to capture the shear distortion of the panel zone. The remaining
three corners are modeled as pinned connections (Figure 5.10(b)). The column and beam depths
are used as the width and height of the panel zone element, respectively. The panel zone thickness
is taken as the summation of column web and doubler plate thicknesses. The thickness of the
0 0.05 0.1 0.150
2000
4000
6000
Rotation (rad)
Mom
ent
(kN
-m)
Welded connection
PT connection
Top-and-seat angle connection

101
doubler plates, which are only used for interior connections, is summarized in Table 5.1. A leaning
column is included to account for P-Δ effects. The gravity load carried by the lateral force resisting
system in the prototype building is applied as distributed loads acting on the beam, whereas the
gravity load carried by the gravity system is applied as concentrated loads acting on the leaning
column. The floor mass is uniformly assigned to each joint node.
A 2D model of the WMRF, which has the same member sizes as the SC-MRF, is also
constructed in OpenSees. Garlock et al. [89] determined the member sizes for the WMRF as an
intermediate step during the design of the SC-MRF. The forced demand for each member and the
story drift for the whole frame were checked to ensure that the strength and deformation are
satisfied. Since the WMRF and SC-MRF have the same member sizes, the WMRF and SC-MRF
have similar periods of vibration, as shown in Table 5.6. Except for the beam hinges, the modeling
of the WMRF is similar to that of the SC-MRF. In the WMRF model, the beam hinge is modeled
as a rotational spring with modified IMK material instead of the parallel combination of Self-
centering and Pinching4 materials. It should be noted that both WMRF and SC-MRF structural
models capture the flexural strength and stiffness deterioration of structural elements, which has
been shown to significantly influence the collapse behavior of the building.

102
(a)
(b)
(c)
Figure 5.10 OpenSees model for the SC-MRF: (a) overview of the model, (b) details for SC-
MRF connection, and (c) details for leaning column joint
Table 5.6 Comparison of natural periods for WMRF and SC-MRF (unit: second).
Mode WMRF SC-MRF
1st mode 1.94 2.10
2nd mode 0.71 0.75
Gravity
Leaning
Column
Concentrated
load
Pinsupport
Panel zone.
See detailed
view in Figure
5.10(b)
See detailed
view in Figure
5.10(c)
Bottom
hingeFixedsupport
(4)
(1)
(2)
(3)
(1)
(5)
(7)
(6)
(1)
(5)
(1) elastic beam-column element. (2) zero-length rotational spring with Hysteretic material.
(3) zero-length rotational spring with Self-centering and Pinching4 material in parallel.
(4) zero-length rotational spring with modified IMK material. (5) OpenSees node.
(6) zero-length rotational spring with very small stiffness. (7) truss element.

103
5.3 Nonlinear Static and Dynamic Analyses
5.3.1 Nonlinear Static Response
To compare the pushover response characteristics of the frame models, nonlinear static
analyses are performed for the SC-MRF and WMRF models. The pushover loading pattern is
calculated based on the equivalent lateral force procedure prescribed in ASCE 7-10 [30] and
assuming that the response is governed by the first-mode of vibration. Figure 5.11 shows the
pushover responses for the two models. The frame base shear force is normalized with respect to
its tributary seismic weight. The SC-MRF and WMRF reach their peak strength (referred to as
capping point) of 0.12 and 0.20 at roof drift ratios of 0.027 and 0.031, respectively. This indicates
that the peak strength of the SC-MRF is 40% lower than that of the WMRF. These results are
consistent with those of a study by Lin et al. [96], where the normalized base shear from nonlinear
static analysis of an SC-MRF was computed to be 0.08. They reported that the SC-MRF had an
initial stiffness that was the same as that of a comparable WMRF, but the SC-MRF had a lower
strength, which is partly attributed to the gap-opening response characteristics of PT connections.
The results of nonlinear response history analyses by Ricles et al. [97] also showed that moment
frames with PT connections experience lower base shears compared to moment frames with
welded connections.
To quantify the strength degradation, post-capping slopes of the two pushover curves are
compared by performing least-square fitting for the points between the capping point and
maximum roof drift [98]. The post-peak slopes for WMRF and SC-MRF are -1.68 and -1.20,
respectively, which indicates that the SC-MRF has a slower rate of strength degradation. This is
attributed to the load carrying mechanism of the frames. The PT connection resists external
moments primarily through gap opening and closing at the beam-column interface, whereas the

104
welded connection carries the external loads through forces on the beam and panel zone. As a
result, the strength of the WMRF is higher compared to the SC-MRF. This explanation is
consistent with the experimental study and findings reported by Lin et al. [96]. Additionally, both
frame models have an identical initial stiffness. These observations are also consistent with the
mechanical behavior of the beam-column connection used in the frame, as shown in Figure 5.9.
Figure 5.11 Monotonic pushover curves for the SC-MRF and WMRF
5.3.2 Incremental Dynamic Analysis and Collapse and Demolition Fragility Curves
The dynamic performance of the SC-MRF and WMRF is assessed using incremental
dynamic analysis (IDA) [61]. The set of 44 (22 pairs) far-field ground motion records specified in
FEMA P695 [6] are used. The magnitude for these records varies from M6.5 to M7.6 with an
average of M7.0. Thirty-two (16 pairs) of the ground motions were recorded at sites classified as
site class D and the remaining records are from site class C locations. The peak ground acceleration
for the record set varies from 0.21 g to 0.82 g with an average of 0.43 g. More detailed information
about the ground motion records can be found in Appendix A of FEMA P695. Scaling for IDAs
is performed such that the median spectral acceleration of the record set matches the specified
intensity levels, which ranges from 0.2 g to 3.0 g at an increment of 0.2 g.
0 0.02 0.04 0.06 0.08 0.10
0.05
0.1
0.15
0.2
0.25
Roof drift ratio
No
rmali
zed
base
sh
ear
WMRF
SC-MRF

105
During the IDAs, collapse is taken as the point at which dynamic instability occurs or the
collapse drift limit of 10% is exceeded. This assumption is consistent with Table 4-10 of the SAC
report [99], which states that collapse prevention performance is violated when the story drift
exceeds 10% for buildings with 4 to 12 stories.
The IDA results are used to generate fragilities for the WMRF and SC-MRF. Fragility
functions are used to quantify the probability that the structure will exceed a particular damage
state at a function of an intensity measure (IM). In this study, the probability of collapse and
demolition conditioned on the spectral acceleration level at the 1st mode period, is determined from
the IDA results. The empirical collapse and demolition data is fit to the lognormal cumulative
distribution function by utilizing the maximum likelihood method [59].
Figure 5.12(a) shows the collapse fragility curves for the SC-MRF and WMRF buildings.
As specified in FEMA P695 [6], the collapse margin ratio (CMR) is defined as the ratio of the
median collapse spectral acceleration to the spectral acceleration of the maximum considered
earthquake (MCE) (SaMCE) at the fundamental period of the structure. The median collapse capacity
(prior to adjusting for the spectral shape factor) for the WMRF and SC-MRF are 2.03 g and 1.07
g, respectively. This indicates that the WMRF has a much better collapse performance, which is
due to its higher lateral load carrying capacity. Further, the record-to-record variation, which is
described by the log-standard deviation of the collapse capacity, for the WMRF and SC-MRF are
0.35 and 0.33, respectively. With SaMCE = 0.69 g for the prototype building [89], the CMRs for the
WMRF and SC-MRF are 2.94 and 1.55, respectively. The CMR is further adjusted by multiplying
a spectral shape factor (1.44 for WMRF and 1.48 for SC-MRF) (FEMA P695 [6], Table 7-1). Thus,
the adjusted collapse margin ratios (ACMRs) for WMRF and SC-MRF are 4.23 and 2.30,
respectively. According to Table 7-3 in FEMA P695, the minimum permissible ACMR for the

106
WMRF and SC-MRF, which is based on a maximum MCE level collapse probability of 10%, is
1.83 and 2.02, respectively. In this case, the ACMRs for both WMRF and SC-MRF are greater
than their permissible values, which indicates that the collapse resistance of both frames is
acceptable.
Figure 5.12(b) shows the demolition fragility curves for the two frame models based on a
residual drift limit of 0.5% [100]. For the SC-MRF and WMRF, the median spectral intensity at
which demolition is triggered is 0.67 g and 0.57 g, respectively, which indicates that the PT
connection is able to reduce the effect of residual drifts. However, the median demolition capacity
of the SC-MRF is only 18% higher than the WMRF. In contrast, the median collapse capacity of
the WMRF is almost twice that of the SC-MRF.
(a)
(b)
Figure 5.12 Fragility results: (a) collapse and (b) demolition fragility curves
5.3.3 Discussion on Comparison between SC-MRF and WMRF
As noted earlier, the superior collapse performance of the WMRF compared to the SC-
MRF is due to the higher lateral force resistance of the former. The reason being that, unlike the
RBS connection, which has a yielding mechanism that is controlled by the strength of the beam,
the PT connection is controlled by gap opening and damage (yielding and local buckling) to the
top and seat angles. Previous studies [36,40] have shown that it is possible for SC-MRFs to have
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
SaT1
(g)
Pro
bab
ilit
y
WMRF
SC-MRF
0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
SaT1
(g)
Pro
babil
ity
WMRF
SC-MRF

107
at least similar or higher collapse resistance than WMRFs. However, the PT connection in these
studies incorporated web hourglass pins (WHPs) that provided a flexural strength that is governed
by beam yielding. The same studies noted that the WHPs have an optimized shape with enhanced
fracture capacity, which is likely to enhance the overall collapse performance. Finally, Ahmadi
[101] showed that the collapse resistance of SC-MRF systems (compared to WMRF) depends on
the adopted design procedure. More specifically, they designed two SC-MRFs and one WMRF.
The two SC-MRFs had identical member sizes but different connection detailing (number of
strands, PT force, and reinforcing plate length). Their results showed that, compared to the WMRF,
the collapse resistance was higher for one of the SC-MRFs and lower for the other. All of these
factors support the results in the current study, which is also consistent with the findings reported
by Lin et al. [96]. However, it is important to highlight that the collapse performance of the SC-
MRF can be significantly improved by adopting a PT connection whose flexural strength is
comparable to that of a WMRF.
5.4 Economic Loss Assessment
5.4.1 Overview of FEMA P-58 Methodology
The methodology specified in FEMA P-58 [4], which is applied in this study, is generally
divided into four sections: hazard assessment, structural analysis, damage evaluation, and loss
estimation. These four elements are briefly described below:
Earthquake hazard assessment involves conducting probabilistic seismic hazard analysis
to determine the mean annual frequency of exceeding a range of ground motion intensities at the
building site (λ[IM]). The analysis identifies earthquake sources, characterizes the distribution of
earthquake magnitudes and source to site distance, predicts ground motion intensity, and
eventually combines the associated uncertainties. In this study, the spectral acceleration at the

108
fundamental period (Sa(T1)) of the building is used as the ground motion intensity. The hazard
curve, which is shown in Figure 5.13, is obtained from the Unified Hazard Tool [102] provided by
the USGS website (https://earthquake.usgs.gov) using a site class D location with an SaMCE
corresponding to the value used to design the prototype building.
Structural analyses are used to obtain the probability distribution of various engineering
demand parameters (EDPs) conditioned on the ground motion intensity. In this study, the EDPs,
which include peak story drift ratios (PSDRs), peak floor accelerations (PFAs), and residual drift
ratios, are extracted from the IDA results presented in Section 5.3.2.
The damage evaluation uses fragility functions to probabilistically describe the damage to
individual building components. The fragility specification includes a description of the
component, a description of the possible damage states, and the probabilistic relationship between
the damage measure (DM) and the EDPs. Detailed information about the fragility specifications is
provided in the Fragility Database of FEMA P-58. As specified in FEMA P-58, the building
components are grouped based on the governing EDPs (e.g., SDRs or PFAs), locations (e.g., a
certain story), and type (e.g., wall partitions or water piping system). The damage states for each
group describe the required repair efforts to restore the components to the undamaged state. This
process is conducted using the online tool Seismic Performance Prediction Program [3].
Loss estimation links the damage measures to decision variables (DVs), such as economic
losses, downtime, and fatalities. In this study, only economic losses are considered.
The four main steps of the FEMA P-58 methodology are related by the total probability
theorem as follows [88]:
( ) | | | ( )DV G DV DM dG DM EDP dG EDP IM d IM = (5.1)
where G[DV|DM] denotes the conditional probability of exceeding a specified loss amount

109
given the level of damage, G[DM|EDP] denotes the conditional probability of exceeding a
specified level of damage given the structural response, G[EDP|IM] denotes the conditional
probability of exceeding some structural response demand given the ground motion intensity, λ[IM]
is the mean annual frequency of exceeding some ground motion intensity level, and λ[DV] is the
mean annual frequency of exceeding a given loss amount. Economic losses conditioned on a
specific intensity level is computed using the following relationship [39]:
[ ] [ ] [ ]
[ | ] [ | ] [ | ] [ | ]
E L| IM E L| NC R,IM P NC R | IM
E L NC D P NC D IM E L C P C IM
=
+ + (5.2)
The expected economic loss conditioned on the ground motion intensity (E[L|IM]) is
calculated by considering three scenarios: E(L|NC∩R, IM) is the expected loss for a non-collapse
scenario and the building is repaired. This loss is calculated based on the repair cost for different
damage states of each component in the building, which is specified in the FEMA P-58 database.
E(L|NC∩D, IM) is the expected loss when no collapse occurs but the building is demolished
because of excessive residual drifts. In this case, the loss is 100% of the building value plus an
additional 25% of the construction cost for removing the debris [4]. E[L|C] is the expected loss
conditioned on collapse, which is identical to E(L|NC∩D, IM), i.e., 125% of the building
construction cost. To facilitate the calculation, Equation (5.2) can be further simplified as follows
[39]:
[ ] [L | NC , ]{1 P(D | NC, IM}{1 P(C | IM)}
[ | NC ]P[D | NC, IM]{1 P(C | IM)} [ | ] [ | ]
E L| IM E R IM
E L D E L C P C IM
= − −
+ − + (5.3)
In Equation (5.3), P[C|IM] represents the probability of collapse when subjected to a
certain intensity level of ground motion. It can be directly obtained from the collapse fragility
curve (Figure 5.12(a)) generated using incremental dynamic analysis. P[D|NC, IM] corresponds to
the probability that the structure will be demolished conditioned on non-collapse and the ground

110
motion intensity level, which can be calculated using the following equation [39]:
0
[ | , ] [ | ] [ | , ]P D NC IM P D RDR dP RDR NC IM
= (5.4)
where P[D|RIDR] is the probability that the building will be demolished given the peak
residual story drift. As Ramirez and Miranda [39] suggested, P[D|RIDR] is assumed to follow a
lognormal distribution with a median of 0.015 and a logarithmic standard deviation of 0.3.
By probabilistically combining the losses associated with the three aforementioned
scenarios, the economic loss conditioned on the ground motion intensity (E[L|IM]) is obtained.
The expected annual loss is calculated by integrating the intensity-based losses times the slope of
the hazard curve for the site:
0
d ( )[ ] [ | ] d
d
IME L E L IM IM
IM
= (5.5)
where d ( )
dd
IMIM
IM
is calculated based on the seismic hazard curve in Figure 5.13.
Figure 5.13 Seismic hazard curve corresponding to the site of interest
5.4.2 Description of Building Components
Table 5.7 lists the damageable structural and nonstructural components adopted in the
10-2
10-1
100
10-4
10-3
10-2
10-1
100
100
SaT1
(g)
(
Sa)

111
current study. Since the fragility specifications (damage states, repair cost, etc.) for PT connections
are not specifically stated in FEMA P-58, the damage states are defined based on the experimental
observations reported by Garlock et al. [79]. More specifically, the two damage states defined for
the PT connection are beam local buckling and angle fracture, respectively. The corresponding
median story drift ratios for these two states are 1.85% and 4.0%. The construction cost per square
foot is 235 US dollars (2530 US dollars per square meter) based on the estimate provided by
Seismic Performance Prediction Program [3]. The total construction cost for the building is 45.7
million US dollars. All economic losses are normalized with respect to the building’s replacement
cost excluding the cost of demolition. The demolition cost, which includes the removal of debris,
is taken as 25% of the initial construction cost [4].
Table 5.7 Damageable components
Component
category Building component Unit EDP
Quantity per
story
Structural
component
Structural steel moment frames Each SDR 16
Exterior connections Each SDR 8
Interior connections Each SDR 12
Non-structural
component
Curtain walls 30 ft2 SDR 156
Partition walls 100 ft SDR 32.44
Wall partition finishes 100 ft SDR 2.45
Suspended ceiling 250 ft2 PFA 130
Independent pendant lighting Each PFA 49
Potable water piping 1000 ft PFA 5.55
Potable water pipe bracing 1000 ft PFA 5.55
HVAC Ducting 1000 ft PFA 3.08
Fire sprinkler water piping 1000 ft PFA 6.49
Fire sprinkler drop ×100 PFA 2.92
Heating water piping 1000 ft PFA 0.32
Heating water piping bracing 1000 ft PFA 0.32
Sanitary waste piping 1000 ft PFA 1.85
Sanitary waste piping bracing 1000 ft PFA 1.85
Traction elevator Each PFA 6*
* Quantity is for the entire building

112
5.4.3 Expected Loss Conditioned on Seismic Intensity
Figure 5.14 shows the expected losses for the building with SC-MRFs as its lateral force
resisting system. The total loss increases linearly with the ground motion intensity and gradually
reaches a plateau, approaching the summation of demolition and replacement costs (125%
normalized expected loss). The losses are further disaggregated into the expected losses associated
with collapse, demolition, and repair. As shown in Figure 5.14, when the intensity of the ground
motion is lower than 0.45 g, the total loss is dominated by repairs. As the intensity increases beyond
0.45 g, the demolition cost governs the total economic loss. The collapse cost does not dominate
until the intensity reaches 1.1 g, which is approximately one and a half times the MCE level. These
observations indicate that: (1) the building experiences slight damage under low-intensity ground
motions (Sa ≤ 0.45 g) and is therefore repairable; (2) under medium-intensity ground motions (0.45
g < Sa ≤ 1.1 g), there is a higher likelihood of irreparable damage because of excessive residual
drift; and (3) under high-intensity ground motions (Sa > 1.1 g), collapse safety is a concern.
Figure 5.14 Expected loss for the building with SC-MRFs
Figure 5.15 compares the expected losses for the WMRF and SC-MRF buildings.
0.2 0.4 0.6 0.8 1 1.20 %
25%
50%
75%
100%
125%
SaT1
(g)
Norm
ali
zed r
epair
cost
Total loss
Collapse
Residual drift
Repair

113
Generally, the total loss for the SC-MRF building is slightly higher compared to the WMRF
building. More specifically, the collapse losses are higher in the SC-MRF and the demolition costs
are higher in the WMRF building at all ground motion intensity levels. This is because the SC-
MRF has a lower collapse resistance and a smaller residual drift, both of which are related to the
characteristics of PT connections. Compared to the RBS welded connection, the PT connection
has a lower strength, but it is efficient in minimizing the residual drift. The loss associated with
component repair is almost the same for the two buildings.
(a)
(b)
(c)
(d)
Figure 5.15 Comparison of expected loss for WMRF and SC-MRF buildings including (a) total,
(b) collapse, (c) demolition, and (d) repair losses
5.4.4 Expected Annual Loss
The expected annual loss is obtained by integrating the IM-Loss relationship shown in
0.2 0.4 0.6 0.8 1 1.20 %
25%
50%
75%
100%
125%
To
tal
loss
SaT1
(g)
WMRF
SC-MRF
0.2 0.4 0.6 0.8 1 1.20 %
25%
50%
75%
100%
125%
Co
llap
se l
oss
SaT1
(g)
WMRF
SC-MRF
0.2 0.4 0.6 0.8 1 1.20 %
25%
50%
75%
100%
125%
Dem
oli
tion l
oss
SaT1
(g)
WMRF
SC-MRF
0.2 0.4 0.6 0.8 1 1.20 %
25%
50%
75%
100%
125%
Rep
air
loss
SaT1
(g)
WMRF
SC-MRF

114
Figure 5.14 with the hazard curve (in Figure 5.13). The normalized (by total cost) expected annual
losses for the SC-MRF and WMRF buildings are 0.51% and 0.42%, respectively. Figure 5.16
shows the expected annual loss disaggregated based on the contributing factors. Collapse accounts
for 25.5% and 4.8% of the expected annual loss for the SC-MRF and WMRF buildings,
respectively. The expected annual loss associated with demolition of the SC-MRF and WMRF
buildings is 41.3% and 75.9%, respectively. These observations again illustrate that the SC-MRF
is effective in minimizing permanent damage caused by excessive residual drifts but has inferior
collapse performance.
(a)
(b)
Figure 5.16 Comparison of annual expected loss between (a) SC-MRF and (b) WMRF buildings
5.5 Summary
A comparative assessment of the seismic performance and economic losses for a self-
centering moment resisting frame (SC-MRF) and reduced beam section (RBS) welded moment
resisting frame (WMRF) is presented, where the SC-MRF and WMRF have identical beam and
column sizes. First, a reliable phenomenological model for PT beam-column connections with top-
and-seat angles is developed and verified against past experimental results. A prototype building,
which has SC-MRFs as its lateral force resisting system, is selected. Using the developed
phenomenological model, a model of the entire frame is constructed in OpenSees. Nonlinear static
Collapse (25.5%)
Demolition (41.3%)
Repair (33.2%) Collapse (4.8%)
Demolition (75.9%)
Repair (19.3%)

115
and response history analyses are subsequently performed to study the response of the frame
models. The pushover analysis results indicate that the strength of the SC-MRF is 40% lower than
that of the WMRF. The dynamic analysis results show that the WMRF has higher collapse
resistance, whereas the SC-MRF undergoes smaller residual drifts. However, it is worth noting
that the collapse resistance of both frames is within the permissible values of acceptable collapse
margin ratio of the FEMA P695 guidelines. Finally, the economic seismic losses for the SC-MRF
and WMRF buildings are assessed using the FEMA P-58 methodology, which accounts for the
influence of residual drift and the repair costs of structural and nonstructural components. The
results reveal that the expected annual loss for the SC-MRF building is 21% higher than that for
the WMRF building. More specifically, the SC-MRF building has a lower expected loss associated
with demolition, but higher losses associated with collapse.
It is important to reiterate the context of the findings from the current study which involved
a comparative seismic performance assessment for a “designed” SC-MRF and a WMRF with the
same member sizes obtained from SC-MRF design. Moreover, the considered SC-MRF
incorporated a PT connection with top-and-seated angles. The performance of the SC-MRF could
be significantly improved by using a connection detail that provides flexural strengths that are
comparable to a WMRF (e.g., web hour glass pinned connection).

116
6. Seismic Drift Demand Estimation for SMRF Buildings: from
Mechanics-Based to Data-Driven Models
This chapter is adopted from the following study:
Guan, X., Burton, H., Shokrabadi, M., & Yi, Z. (2021). Seismic drift demand estimation
for SMF buildings: from mechanistic to data-driven models. Journal of Structural Engineering.
DOI: 10.1061/(ASCE)ST.1943-541X.0003004. (Accepted for publication)
6.1 Introduction
The second-generation performance-based seismic design (PBSD) framework [1] enables
structural engineers to target specific stakeholder-driven building performance objectives. As
shown in Figure 6.1, PBSD begins with defining a set of performance objectives using some metric
of interest (e.g., reliability, resilience, and/or lifecycle cost), followed by a preliminary design.
Ideally, the building performance should then be assessed by conducting nonlinear response
history analyses (NRHAs) on a structural model of the design and using the generated engineering
demand parameters (EDPs) (e.g., peak story drifts, peak floor accelerations, residual story drifts)
to evaluate earthquake-induced impacts (e.g., physical damage, economic losses, the probable
number of fatalities, functional recovery time). Based on the results of this initial assessment, the
design is revised as needed and the assessment is repeated until the performance meets the
predefined objectives.
While PBSD is commonly considered to be a state-of-the-art design method that can
effectively target specific performance outcomes, it has not been widely adopted in practice. This
is partly because the majority of engineers rely on elastic models to estimate seismic demands,
which is generally not suitable for rigorous performance-based assessments. Even when nonlinear
models are employed, the iterative process of conducting NRHAs and revisiting the design would

117
be computationally expensive and labor intensive.
Apart from the computational challenges associated with building-specific PBSD, recent
efforts have been directed towards using the 2nd generation performance-based earthquake
engineering (PBEE) methodology [88] to assess regional seismic impacts (e.g., economic losses,
fatalities) [103]. PBEE-based regional earthquake impact assessments are intended to replace the
more simplistic methods embedded in platforms such as HAZUS [104] and OpenQuake [105].
However, using NRHAs to generate the EDPs needed to conduct PBEE-type assessments for
hundreds of thousands or even millions of buildings may be impractical under some circumstances.
Figure 6.1 Overview of the performance-based seismic design procedure
To address the aforementioned challenges, several simplified methodologies have been
developed and used to estimate seismic drift demands in buildings (summarized in Table 6.1).
Some of these techniques are derived solely based on classical mechanics (e.g., shear and flexural
beam theory), structural dynamics, and/or linear models coupled with static analyses (referred to
as mechanics-based models in the remainder of this paper) (e.g., [64–66]). These models are often
preferred by practicing engineers because they are assumed to be highly generalizable and easy to

118
interpret. However, these methods often rely on many simplifications, which can reduce the
accuracy of response estimates. Moreover, the assumptions underlying these models may not be
applicable to specific conditions. Some other methods have been developed based on some
combination of mechanics-based and statistical approaches (e.g., linear regression and other
machine learning techniques) (referred to as hybrid models in the remainder of this paper) [4,63].
These models attempt to strike a balance between interpretability and applicability. The final
category of methods rely solely on advanced statistical or machine learning models (e.g., artificial
neural network) (referred to as data-driven models) [47,67]. While these methods are less reliant
on convenient simplifications, the excessive use of complex statistical models might render them
difficult to interpret and therefore draw skepticism from the practicing structural engineering
community.
Table 6.1 Some existing approaches for predicting seismic drift demands
Model Type Reference Model Basis Advantages Limitations
Mechanics-
based
Miranda [65];
Miranda and
Reyes [66]
Shear and flexural beam
theory
Simple to
implement and
interpret
Relies on several limiting
assumptions;
Two coefficients need to
be calibrated
Lin and Miranda
[64] Elasto-plastic SDOF
Based on
structural
dynamics
principles
Only three building cases
used to evaluate the
method
Hybrid
Gupta and
Krawinkler [63]
Four empirical
coefficients used to link
spectral displacements
to peak story drifts
Easy-to-follow
procedure
No generalizable approach
to computing empirical
coefficients provided
FEMA P-58 [4] Linear models with
static analyses
Simple to
implement
Relies on several limiting
assumptions;
Limited to buildings <= 15
stories
Purely data-
driven
Morfidis and
Kostinakis [106]
Artificial neural
networks
Does not rely on
any assumptions Difficult to interpret
Zhang et al. [67]
Deep long short-term
memory (LSTM)
networks
Estimates the
entire response
history
Difficult to interpret
Cook et al. [107] “Structural response
prediction engine”
Simple to
implement
Underlying details not
revealed

119
The methodologies summarized in Table 6.1 have greatly enhanced our ability to rapidly
estimate seismic structural response demands. However, the following limitations still exist in their
development and implementation: Method: these existing approaches either rely on a series of
simplifications or involve relatively complex deep learning models, both of which pose an
impediment to their adoption in structural engineering practice. Data used for calibration and/or
validation: most of the available methods are validated against a few (three to five) buildings
subjected to a very small number of ground motions (maximum of five). As a result, whether they
can provide reliable predictions under a broad range of conditions remains unknown. Model
development and testing approach: For the existing data-driven or hybrid (mechanics-based +
data-driven) methods, none of them utilized rigorous model performance evaluation, which, again,
brings into question the breadth of their applicability. A rigorous hybrid or data-driven model
development and evaluation procedure would include training, validation, and testing using three
different datasets. The testing set should be independent of the training and validation sets.
Prediction accuracy: most of the existing methods are evaluated using a single error metric (e.g.,
mean squared error, relative difference, or mean absolute relative deviation), which only reveals
partial information about the model accuracy. Ideally, the proposed methods should be assessed
such that their accuracy are fully transparent to the users. To address these limitations, there is a
need to develop a framework that strikes a balance among accuracy, convenience, and
interpretability. Additionally, new models should be developed using a rigorous process and large
diverse dataset, then evaluated using a range of error indicators.
Recent advancements in data-driven techniques (e.g., statistical/machine learning),
combined with the availability of large amounts of data and breakthroughs in computational tools
and resources, have created opportunities to revolutionize the process of estimating structural

120
response quantities in earthquake engineering. Data-driven approaches are especially useful when
there is no analytical model to predict the metric of interest or the available models are excessively
complicated and/or rely on many simplifying assumptions. Harnessing big data and statistical
learning methods in many cases would result in predictions that are as accurate as many
sophisticated engineering models but can be obtained with less effort. The Seismic Performance
Prediction Program (SP3) (https://www.hbrisk.com/) provides the option for users to adopt its
built-in data-driven methods to estimate seismic demands as a sub-step in PBEE assessments.
However, no details are provided on the adopted statistical techniques and evaluation approaches
[107].
The specific contributions of the current study are to: (1) propose a generalized framework
for developing data-driven or hybrid models to estimate building structural responses under
extreme event loading, (2) develop data-driven and hybrid models for estimating seismic drift
demands in special steel moment resisting frames (SMRFs), thus illustrating the framework
application, (3) quantitatively measure the relative importance of structural and spectral
parameters for estimating seismic demands, (4) comparatively assess the newly developed and
existing models for predicting seismic drift demands in SMRFs focusing on their predictive
performance and level of end-user effort needed to apply them. As outlined in Figure 6.2, four
previously developed methodologies are introduced, and their benefits and drawbacks are
examined. Then, a general framework for developing seismic demand estimation models is
proposed such that it can be adapted to other types of lateral force resisting systems (LFRS’s).
Using the same framework, new data-driven and hybrid models are formulated and rigorously
tested against a comprehensive database that includes structural responses obtained by subjecting
the 621 SMRFs designed in accordance with modern codes and standards to 240 ground motions.

121
Finally, a comparative assessment among the new and existing models is performed to highlight
where they fall on the spectrum of approaches, evaluate their predictive performance, and elucidate
the end-user effort needed to apply them. All models are rigorously evaluated using multiple
performance metrics and a separate dataset of responses for a subgroup of 100 special moment
resisting frames (SMRFs) subjected to three sets of site-specific ground motions (different from
the 240 used to develop the new models) selected based on the service-level earthquake (SLE),
design-based earthquake (DBE), and maximum considered earthquake (MCE).
Figure 6.2 Overview of study
6.2 Overview of Existing Simplified Methods for Estimating Seismic Drift
Demands
Within the current literature, there are several simplified methodologies for estimating
seismic drift demands. One common theme among them is that they are all rooted in the
fundamental principles of structural dynamics and/or beam theory. Some rely solely on basic

122
physics, whereas others have attempted to integrate statistical regression using the structural
response data generated from NRHAs. These existing methods form a spectrum with purely
mechanics-based models on one end and purely data-driven models on the other. Between these
two extremes, there are models that combine elements of engineering mechanics and statistical
learning. Four existing representative methods that fall within this spectrum are examined in this
section.
6.2.1 Shear and Flexural Beam Theory
Miranda and Reyes [66] developed an approximate method to estimate the maximum
lateral displacement demands (which are eventually converted to story drifts) in multistory
buildings using beam theory. A multistory building is idealized as an equivalent continuum
structure consisting of a combination of shear and flexural cantilever beams connected via axially
rigid links, such that they have the same lateral deflection at the same points along the height. After
a series of derivations based on differential equations that are intended to capture both shear and
flexural response, the maximum roof displacement and maximum story drift ratio are estimated by
Equations (6.1) and (6.2), respectively. In Equation (6.1), the 𝛽1 factor is applied to the spectral
displacement evaluated at the fundamental period of the structure (𝑆𝑑) to obtain the elastic roof
displacement, which is further amplified by 𝛽3 to calculate the maximum inelastic roof
displacement ( 𝑢𝑟𝑜𝑜𝑓 ). Similarly, in Equation (6.2), the maximum elastic roof displacement
(𝑢𝑟𝑜𝑜𝑓,𝑒𝑙𝑎𝑠𝑡𝑖𝑐) is first normalized by the building height (𝐻) and then converted to the maximum
elastic story drift via 𝛽2. This elastic story drift is further amplified by 𝛽4 to obtain the maximum
inelastic story drift (𝑆𝐷𝑅𝑚𝑎𝑥).
More details on the derivation process are provided in Miranda and Reyes [66].
1 3roof du S = (6.1)

123
,
max 2 4
roof elasticuSDR
H = (6.2)
The method developed based on beam theory is relatively easy to interpret and provides an
approximation for the preliminary design of new buildings. However, it has several limitations.
First, the underlying assumption that the mass is uniformly distributed along the building height
might not be applicable since the weight of the roof is generally different from that of typical floors
in real buildings. Second, determining an important parameter (𝛼0) that reflects the degree of
participation of overall flexural and shear deformation in the simplified model of multistory
buildings requires significant effort. Consequently, the value of 𝛼0 is typically determined based
on engineering judgement and established rule of thumbs, which might be unreliable. Third, for
buildings with varying lateral stiffness, the differential equation set is difficult to solve. Last, the
output of this method is a single maximum story drift not the peak story drift profile. The latter is
critical for PBEE-type evaluations. All of these aforementioned drawbacks reduce the
effectiveness of this method in engineering practice.
6.2.2 Elastoplastic Single-Degree-of-Freedom with Known Yield Strength (PSKY)
Lin and Miranda [64] proposed a methodology that uses an equivalent elastoplastic single-
degree-of-freedom (SDOF) system coupled with the lateral yield strength of the building to
estimate the maximum inelastic roof displacement demand of regular steel frame buildings. The
equivalent elastoplastic SDOF is constructed using the first-mode period (𝑇1), effective height
(𝐻𝑒𝑓𝑓), effective mass (𝑀𝑒𝑓𝑓), effective stiffness (𝐾𝑒𝑓𝑓), and yield strength (𝑉𝑦,𝑆𝐷𝑂𝐹). The first
four parameters are derived from structural dynamics principles [108] and the last parameter is
estimated by idealizing the pushover curve generated by a multi-degree-of-freedom system
(MDOF) of the building into a bilinear response. The equations to obtain 𝐻𝑒𝑓𝑓, 𝑀𝑒𝑓𝑓, 𝐾𝑒𝑓𝑓, and

124
𝑉𝑦,𝑆𝐷𝑂𝐹 are provided in Chopra [108]. Inelastic displacements (∆𝑆𝐷𝑂𝐹) are obtained by performing
NRHAs on the elastoplastic SDOF system. The roof displacement demand is estimated using
Equation (6.3).
1 SDOFu PF= (6.3)
where the modal participation factor 𝑃𝐹1 is computed using a normalized mode shape that
takes on a value of 1.0 at the roof level. While it was not noted in the original study [64], this
method could be adapted to estimate full profile story drift demands (∆𝑚𝑢𝑙𝑡𝑖) using the following
equation [108]:
1 1multi SDOFPF = (6.4)
where 𝜙1 is the first-mode shape.
The PSKY method was validated on a relatively small dataset that included the structural
responses from three steel moment frame buildings subjected to 72 earthquake ground motions.
Moreover, it requires performing nonlinear static analysis on the entire structure and nonlinear
response history analyses on an elastoplastic SDOF. As such, a reasonable argument can be made
that the level of effort required is comparable to performing nonlinear response history analyses
on an MDOF. However, it is worth noting that there are existing simplified expressions that could
be used to compute 𝑉𝑦 (e.g., Equation (5-2) in FEMA P-58 [4]).
6.2.3 Statistically Adjusted Spectral Displacement
Gupta and Krawinkler [63] proposed a framework that establishes a relationship between
elastic spectral displacements and inelastic story drift demands using a set of statistically derived
coefficients (i.e., 𝛼𝑀𝐷𝑂𝐹, 𝛼𝐼𝑁𝐸𝐿 , 𝛼𝑃𝛥, and 𝛼𝑆𝑇). The framework starts by relating the elastic spectral
displacement demand at the first mode period of the structure (𝑆𝑑(𝑇1)) to the elastic roof drift

125
obtained from a MDOF system (neglecting P- effects) via a unitless coefficient 𝛼𝑀𝐷𝑂𝐹. Then, the
elastic roof drift demand is further amplified to obtain the inelastic roof drift by applying an
inelasticity factor 𝛼𝐼𝑁𝐸𝐿. The resulting inelastic roof drift demand is subsequently amplified by a
P- modification factor (𝛼𝑃𝛥). Finally, the inelastic roof drift demand is related to the individual
story demands via a modification factor 𝛼𝑆𝑇. The recommendations regarding the values of these
four coefficients are provided in Gupta and Krawinkler [63].
The framework developed by Gupta and Krawinkler [63] provides a clear path from
spectral displacement to individual story drift demand using a set of four coefficients. While it is
useful during the conceptual design phase and is rooted in a fundamental understanding of the
seismic behavior of SMRFs, it has two key limitations. First, the quantitative descriptions for two
of the coefficients (𝛼𝑃𝛥 and 𝛼𝑆𝑇) are not immediately available. Additionally, the framework was
developed using nonlinear analysis results from nine SMRFs subjected to three sets of 40 ground
motions, which brings its generalizability into question.
6.2.4 Statistically Adjusted Response of a Linear Elastic MDOF with Known Yield
Strength (EMKY)
FEMA P-58 [4] provides a simplified method to estimate the seismic responses that are
needed for 2nd generation PBEE-type assessments. The simplified analysis procedure uses linear
elastic MDOF structural models, static analyses, an estimate of the lateral yield strength, and linear
regression to generate median estimates of the seismic drift demands. The details of the
methodology are provided in Section 5.3 of the FEMA P-58 guidelines. This approach can be
viewed as employing a combination of mechanics (i.e., an elastic analysis) and statistical learning
(i.e., simple linear regression). It is relatively straightforward to apply and interpret. However, the
method was evaluated on a dataset that includes four SMRFs subjected to 25 pairs of ground

126
motions [109]. Additionally, no details were provided on whether the accuracy of the model was
assessed, and if so, what metrics were used.
6.3 Generalized Framework for Developing Hybrid and/or Data-Driven
Models for Estimating Building Structural Response Demands under Extreme
Loading
6.3.1 Overview of Framework
In general, hybrid and/or data-driven models utilize statistical and machine learning
techniques to infer patterns in data, which can then be used to forecast different type of phenomena
under uncertain conditions. A generalized framework for developing such models to estimate
seismic structural responses is illustrated in Figure 6.3. The entire framework consists of six main
steps:
Step 1: a comprehensive database of responses is developed from the results of NRHAs
applied to a reasonably large number of structural models representing buildings designed based
on the archetype concept. Note that these responses could also be obtained from physical
experiments or instrumented buildings that have been subjected to earthquake shaking. More
specifically, the parameters that are known to significantly influence seismic structural response
are first identified, then, lower and upper bound values are specified based on the allowable limits
specified in the building code and/or the standard of practice. Next, the possible values of each
parameter are defined such that they uniformly fill the gap between the lower and upper bounds.
These considered parameter values are then combined to form a design space. The resulting
parameter-combinations are used to design a set of buildings in accordance with the relevant
building codes and standards and their seismic responses under ground motion excitations are
retrieved. The dataset included in the database is divided into three mutually exclusive subsets that
127
will be used for training, validating, and testing the model.
Step 2: the variables that are known to influence the response variable (also known as
features or predictor variables) are identified based on domain knowledge or preliminary statistical
analyses. These variables will be used as the inputs for the model developed in Step 3.
Step 3: a model is formulated to link the predictors to the target response variable. From
the perspective of the user, a hybrid (mechanics-based + data-driven) model requires that they
perform some type of mechanic-based analysis (e.g., a modal or linear static structural analysis on
an SDOF or MDOF) to generate some intermediate results (e.g., elastic story drifts). Then, the gap
between the intermediate results and the target response variable (with the predictors as input) is
bridged using some type of function approximator (a machine learning (ML) model in the current
study). A purely data-driven model directly links the predictors to the target response variable
without any type of intermediate mechanic-based analysis.
Step 4: the datasets obtained from Step 1 are used to train and validate the ML models. The
hyperparameters that comprise the ML models are tuned during the training process. Generally,
different ML models should be investigated and an appropriate one is selected based on their
relative accuracy and level of training effort.
Step 5: the selected ML model is diagnosed to ensure that the underlying assumptions are
satisfied. For instance, if a linear regression model is selected in Step 4, then the residuals (the
difference between the predicted and observed values) are checked using a Q-Q plot to test whether
it follows a normal distribution. A sensitivity analysis is then performed to investigate the influence
of different predictors on the model performance. The predictors that are found to have a negligible
influence are removed using either backward stepwise or forward stepwise methods.
Step 6: The model obtained from Step 5 is tested using the dataset from Step 1 to check if

128
it is generalizable. If applicable, the performance of the developed model on testing dataset should
also be compared with existing models to assess their relative accuracy.
The framework presented herein is generalized enough such that it can be used to develop
hybrid and/or data-driven models for estimating the responses for different types of structures (e.g.,
reinforced concrete moment resisting frame or shear wall system) subjecting to loading from
different extreme events (e.g., hurricanes and earthquakes)
Figure 6.3 Framework for developing hybrid/data-driven models to estimate seismic demands
6.3.2 Model Evaluation and Performance Metrics
This section focuses on the metrics that could be used to evaluate the data-driven or hybrid
models that are developed using regression. During the development process, it is essential to
adopt the appropriate performance assessment metrics such that the reliability and accuracy of the
models could be rigorously evaluated. Several criteria can be used to determine the efficacy of a

129
model performance metric. First, the metric should be able to provide an overview of the error
distribution. More specifically, the metric should describe how the proposed method performs both
on average and in the worse/best scenarios. Second, the metric should be easily interpretable by
engineers with a limited background in statistics. Last, the metric should be versatile enough such
that the user could adjust the threshold to decide on the acceptable level of accuracy.
One conventional approach to quantifying the accuracy of a model is to use the relative
difference (𝐷) between the actual and predicted values corresponding to a single data point [110],
which is defined as:
y y
Dy
−= (6.5)
where �� is the predicted value (e.g., obtained using simplified model) and 𝑦 is the actual
value (e.g., obtained from nonlinear response history analyses). The relative difference measures
to what extent a single prediction deviates from its true value. However, it does not consider
whether the prediction method underestimates or overestimates the result. Moreover, a single
relative difference provides limited information. To overcome these two challenges, the relative
difference is re-defined as Equation (6.6), and the mean (𝜇) and standard deviation (𝜎) are used to
describe its overall statistical distribution.
ˆ
i ii
i
y yD
y
−= (6.6)
1
1 N
iiD
N
== (6.7)
2
2
1
1( )
N
iiD
N
== − (6.8)
where 𝑁 is the number of data points. These two variables (𝜇 and 𝜎) indicate the central

130
tendency and dispersion of the relative difference between the predicted and actual values.
Additionally, the mean ( 𝜇 ) reveals to what extent the model produces predictions that are
systematically higher or lower than the observed values (which is known as bias). A zero mean
indicates no bias and positive and negative mean values are indications that the model
systematically overestimates and underestimates the demands, respectively. While a low standard
deviation and a mean close to zero indicate a high accuracy, it is difficult to quantitatively
determine to what extent the standard deviation is small enough to be acceptable.
Similar to the mean relative difference, Sun et al. [111] measured the error in a statistical
model using the median absolute relative deviation (𝑀𝐴𝑅𝐷), which is given by
ˆ
Median( )i i
i
y yMARD
y
−= (6.9)
Although 𝑀𝐴𝑅𝐷 provides the central tendency of the relative deviation, it does not provide
any information regarding the dispersion of the error and whether the prediction is systematically
higher or lower than its true value. Another indicator that is commonly used to evaluate the
performance of regression models is the coefficient of determination (𝑅2), which is defined as
follows:
2
2 1
2
1
ˆ( )1
( )
N
i ii
N
ii
y yR
y y
=
=
−= −
−
(6.10)
which reflects the proportion of the variance in the outcome variable that is predictable
from the input variables. While this coefficient measures a model’s goodness of fit, it does not
explicitly quantify its accuracy.
Morfidis et al. [106] suggests that the error could be measured by the slope of a straight
line that is obtained from applying linear regression to a dataset comprised of the predicted and

131
actual values of the response variable (See Figure 6.4). A slope close to 1.0 generally implies that
the associated accuracy is relatively high. However, this is not always true as the slope of the line
does not convey any information regarding the error dispersion. For instance, the slope in Figure
6.4(a) is closer to 1.0 than in Figure 6.4(b), but the prediction presented in the latter figure is
deemed to be better than that of the former because the dispersion in Figure 6.4(b) is significantly
smaller.
(a)
(b)
Figure 6.4 Trend line obtained from linear regression on the observed and predicted values: (a)
large dispersion and (b) small dispersion cases
The mean squared error (𝑀𝑆𝐸), which is another metric that is often used to describe the
accuracy of a statistical model, is given by
2
1
1ˆ( )
N
i iiMSE y y
N == − (6.11)
𝑀𝑆𝐸 describes the average of the squared difference between the predicted and the actual
values. However, it is dependent on the unit of the response variable (��𝑖). This metric is useful for
comparing the accuracy among different approaches. However, it is less effective when evaluating
a single method because it is difficult to determine the extent to which the 𝑀𝑆𝐸 is small enough
for the model to be deemed acceptable.
Based on the aforementioned three criteria, a new performance metric is proposed. It is the

132
fraction of the dataset whose relative difference does not exceed a predefined percentage.
Mathematically, it is defined as:
%
ˆcountif %i i
i
X
y yX
yD
N
−
= (6.12)
where 𝑐𝑜𝑢𝑛𝑡𝑖𝑓 is a function that counts the number of data points satisfying the condition
in the square brackets, ��𝑖 is the predicted value, 𝑦𝑖 is the actual value, 𝑋 is a threshold defined by
the user, and 𝑁 is the total number of data points. The predicted value (��𝑖) is provided by the
hybrid or data-driven models whereas the actual value (𝑦𝑖) is obtained from NRHAs.
𝐷𝑋% is flexible because the threshold could be adjusted based on the specific context. In
this study, thresholds of 10% and 25% are adopted (𝐷10% and 𝐷25%). Together, these two metrics
describe the distribution of the error. Moreover, they are fairly easy to interpret even by individuals
with limited knowledge of statistics, and the user can determine the acceptable limit for 𝐷10% and
𝐷25% based on heuristic considerations. The simplified seismic drift estimation models considered
in this study are evaluated using all the aforementioned metrics to provide a complete and
transparent assessment of their accuracy.
6.4 New ML-Based Hybrid and Data-Driven Models to Estimate Seismic Drift
Demands
6.4.1 Dataset of SMRF Seismic Responses
As part of a separate study, 621 SMRFs with various geometric configurations and loads
were designed in accordance with current building codes and standards [30,56–58,112]. Based on
the developed code-conforming designs, two-dimensional (2D) nonlinear structural models were
constructed in OpenSees. NRHAs were then performed on these models by subjecting them to a
set of 240 ground motions and the corresponding EDPs (peak story drifts, peak floor accelerations,
133
and residual story drifts) were extracted. There are 81 one-story, 162 five-story, 162 nine-story,
128 fourteen-story, and 88 nineteen-story SMRFs in this database. The typical story height for
these SMRFs is 3.96 m (13 ft) and the ratios of first story to upper story height are 1.0, 1.5, and
2.0. The fundamental periods (estimated using the equation in ASCE 7-16 [30]) for all buildings
range from 0.2 sec to 2.5 sec. Additionally, the EDPs for a subgroup of 100 SMRFs (including 13
one-story, 26 five-story, 26 nine-story, 21 fourteen-story, and 14 nineteen-story SRMFs) subjected
to three sets of site-specific ground motions (with 40 records each) at the SLE, DBE, and MCE
levels, were also obtained. Additional details on the development and content of the database can
be found in Chapter 4.
6.4.2 Overview of Model Development
Inspired by the previously developed methods, two types of models are developed to
predict the seismic story drift demands in SMRFs using the framework (presented in Section 6.3.1):
one of them integrates mechanics and ML techniques (i.e. hybrid models) and the other is purely
data-driven or ML-based. The hybrid model is an adaption of the statistically adjusted EMKY
model. The purely data-driven model is proposed to directly link the building features with the
drift demands. These two models are developed to estimate median drift demands with the
understanding that the appropriate record-to-record variability can be addressed separately (e.g.,
using log-standard deviation values based on heuristics or prior studies).
The dataset described in the previous sub-section, which is used to formulate both the
hybrid and data-driven models, consists of two sub-datasets: the drift demands obtained for 621
SMRFs subjected to 240 ground motions and the demands for 100 SMRFs subjected to three sets
of site-specific ground motions selected based on the SLE, DBE, and MCE hazard levels. The first
dataset (from the 621 SMRFs) is further randomly divided into two subsets comprised of 80% and

134
20% of the original data. The former is used to train the ML model and the latter is used for
validation purposes. Once the model has been trained and validated, it is further tested using the
second dataset (100 SMRFs). This strategy ensures that there are no shared data points among the
training, validation, and testing subsets.
The 240 ground motions used to develop the training/validation dataset are first binned
based on the 𝑆𝑎(𝑇1) value. A total of six bins are formed ensuring that none of them have less than
10 ground motions. The median value of each spectral intensity measure (e.g., 𝑆𝑎(𝑇1)) is used as
one of the predictor variables. In the second dataset, the ground motions associated with each
hazard level (SLE, DBE, or MCE) are considered as one set, and their median intensity measure
is used to validate the data-driven model.
As shown in Figure 6.5, 35 variables (predictors) that have been preliminarily identified as
having an influence on seismic story drift demands, are grouped into four categories: building
information, modal analysis results, spectral intensity parameters, and nonlinear pushover analysis
results. Among these four groups of predictors, the building information parameters are easily
obtained since they could be acquired without any type of structural analysis, whereas the variables
related to pushover analysis are relatively difficult to obtain since they require the construction of
a nonlinear structural model. There are 7 building information predictors: the number of stories
(𝑁𝑠), number of bays (𝑁𝑏), floor height ratio(ℎ𝑖/𝐻) (which is defined as the ratio of the height for
floor 𝑖 to the total building height), bay width (𝑊𝑏), typical floor dead load (𝐷𝐿𝑓𝑙𝑜𝑜𝑟), roof dead
load (𝐷𝐿𝑟𝑜𝑜𝑓), and fundamental period (𝑇) determined using the equation specified in Chapter 12
of ASCE 7-16 [30]. The total building height (𝐻) is not included as an individual predictor since
the floor height ratio (ℎ𝑖/𝐻) already contains the information of the total height. Moreover, prior
studies [4,65,66] suggest that the height ratio is a better predictor than the total building height for

135
estimating the story drift. There are 12 modal analysis parameters included in the predictors: the
first to fourth modal periods (𝑇1, 𝑇2, 𝑇3, and 𝑇4) and the associated four modal shapes (𝜙1, 𝜙2, 𝜙3,
and 𝜙4) and the modal mass participation factors (𝑀𝑀𝑃1, 𝑀𝑀𝑃2, 𝑀𝑀𝑃3, and 𝑀𝑀𝑃4). The modal
shapes are scaled such that the maximum value is 1.0. Each modal shape is a vector including 𝑁 +
1 elements that correspond to each of the floor levels (including the ground level). The input value
used to estimate the drift in story 𝑖 is the (𝑖 + 1)𝑡ℎ element in the vector. The 10 spectral intensity
predictors include the spectral acceleration and displacement values evaluated at the first to fourth
modal periods and the empirical period based on ASCE 7-16 [30] (𝑆𝑎(𝑇1), 𝑆𝑎(𝑇2), 𝑆𝑎(𝑇3), 𝑆𝑎(𝑇4),
𝑆𝑎(𝑇), 𝑆𝑑(𝑇1), 𝑆𝑑(𝑇2), 𝑆𝑑(𝑇3), 𝑆𝑑(𝑇4), and 𝑆𝑑(𝑇)). The following 6 predictors are obtained from
the results of nonlinear static analysis: the force and drift corresponding to the yield point (𝐹𝑦 and
𝛥𝑦), the peak force and associated drift (𝐹𝑝 and 𝛥𝑝), the force at 2% drift (𝐹2%), and the strength
ratio (𝑆) determined using Equation (5-6) in FEMA P-58 [4]. A variable selection process is
performed in the development of each model to determine the relative importance among these 35
predictors and to evaluate the predictive performance with different subsets.
Higher mode effects are expected to be negligible for low-rise buildings but significant for
taller buildings. As such, the relative importance among the various predictors will be different for
these two building groups. Therefore, the data-driven models are developed separately for low-to-
mid-rise buildings (with less than 10 stories) and high-rise buildings (with 10 to 19 stories).

136
Figure 6.5 Initial set of predictor variables considered for the data-driven and hybrid models
6.4.3 ML-based Purely Data-Driven (MLDD) Models
6.4.3.1 Model Formulation
A data-driven model that is solely based on ML is developed to provide a direct link
between the 35 input variables and the nonlinear story drift demands (Figure 6.6). Several ML
algorithms are initially considered including multivariate linear regression [113], kernel ridge
regression [114], random forest [115], XGBoost [116], and artificial neural network [117]. Across
these different models, random forest had the best performance in terms of the various evaluation
metrics and training time. The random forest algorithm belongs to a family of models known as
decision trees, which recursively sub-divides the dataset based on a series of decisions and
associated consequences. A schematic view of a decision tree together with the associated sample
space, which is split into five regions, is presented in Figure 6.7. A basic decision tree model is
highly sensitive to the specific training dataset and thus has a high variance. This drawback is
addressed by generating a number of sub-datasets via the Bootstrap technique [118] and growing
a decision tree on each resampled sub-dataset. These multiple trees are aggregated (which is known

137
as bagging) to provide better predictions. However, bagging is highly likely to produce highly
correlated trees due to the application of the greedy algorithm, where all predictors are considered
at each split. To reduce the correlation among different trees, the greedy algorithm is applied to a
randomly selected portion of the original predictors at each split. This series of adjustments relative
to basic decision trees define the random forest algorithm [115]. A schematic representation of
random forest with three trees for a 𝑁-data sample with 𝑝 predictors is shown in Figure 6.8.
Figure 6.6 Workflow for developing the MLDD model
(a)
(b)
Figure 6.7 A schematic view of a decision tree model: (a) sample space split into five regions
considering two predictors 𝑋1 and 𝑋2, and (b) the corresponding decision tree model

138
Figure 6.8 A schematic illustration of the random forest algorithm with three trees for an 𝑁-data
sample with 𝑝 features
The training and validation results obtained from the random forest algorithm for low-to-
mid-rise buildings are shown in Figure 6.9, in which there are 14,094 maximum story drift data
points in total. As shown in Figure 6.9(a), the training data points are located exactly at the
reference line and the validation points are symmetrically located near the reference line,
indicating that the random forest model is able to provide an unbiased estimation on the training
and validation datasets. Figure 6.9(b) shows that the relative difference follows a normal
distribution. Additionally, the D10% and D25% for the validation dataset are approximately 84% and
100%, respectively, indicating that the random forest model has a high level of accuracy when
predicting the story drift demands for both the training and validation datasets.
Similarly, the random forest model for the high-rise buildings is trained and validated using
the corresponding datasets. The training and validation results are presented in Figure 6.10, in

139
which there are 20,784 maximum story drift demand data points in total. As shown in Figure 6.10,
all training and validation data points are symmetrically clustered near the reference line and 93%
of the validation data points have a relative difference within the range of -10% to +10%. All these
observations demonstrate that the random forest is able to provide an unbiased estimation and has
a relatively high level of accuracy on the training and validation datasets of the high-rise buildings.
A comparison of the relative difference distribution between the low-to-mid-rise and high-rise
buildings indicates similar overall performance.
(a)
(b)
Figure 6.9 Training and validation results for low-to-mid-rise buildings: (a) Observed versus
predicted story drift demand on the training and validation datasets, and (b) the distribution of
relative difference between the observed and predicted drift demand for the validation dataset
(a)
(b)
Figure 6.10 Training and validation results for high-rise buildings: (a) Observed versus predicted
story drift demand on the training and validation datasets, and (b) the distribution of relative
difference between the observed and predicted drift demands for the validation dataset

140
6.4.3.2 Sensitivity of the Model Performance to Adopted Predictors
While the initial set of predictors includes 35 variables, they have different levels of
influence on the predictive performance. To measure their relative effects, the importance score
generated by random forest is computed. When fitting a dataset with random forest, the out-of-bag
error for each training data point is recorded and averaged over the whole forest. After training,
the values for a specific feature are permuted among the training data and the out-of-bag error is
computed again based on this perturbed training dataset. The importance score of the feature is
then computed by averaging the difference in the out-of-bag error before and after the permutation
over all trees. Features with large scores are deemed more important than those with lower scores.
More details on the computation of importance scores are provided in Breiman [119].
Figure 6.11 shows the importance scores for all 35 predictors and the low-to-mid-rise
buildings, which are normalized by the maximum score. It is observed that the spectral acceleration
parameter evaluated at the fundamental period (𝑆𝑎(𝑇)) has the greatest influence on the predictive
performance. The spectral acceleration at the first-mode period (𝑆𝑎(𝑇1)) has the second highest
important score. With the exception of the floor height ratio, all building information predictors
have near zero importance scores. Among the predictors obtained from modal analysis, the first-
mode shape (𝜙1) has the highest importance. With the exception of 𝑆𝑎(𝑇), 𝑆𝑎(𝑇1), 𝑆𝑑(𝑇), and
𝑆𝑑(𝑇1), all other spectral intensity predictors have negligible importance. As for the predictors
extracted from nonlinear static analysis, they capture the level of nonlinearity and dissipated
hysteretic energy in the structural response. However, only the strength ratio (𝑆) is found to be
essential for predictive performance.

141
(a)
(b)
(c)
(d)
Figure 6.11 Normalized importance scores of the 35 predictors for the low-to-mid-rise buildings:
(a) building information, (b) modal information, (c) spectral parameters, and (d) nonlinear static
analysis parameters
Based on the aforementioned importance measurement, a variable selection process is
performed to reduce the number of features required for predicting the amplification factor using
the random forest model. It is worth noting that the variable selection should not be solely based
on the predictors’ importance rank, but also the relative level of difficulty in obtaining each one.
For example, the fist modal period (𝑇1) and yield drift (Δ𝑦) have comparable importance scores.
However, the former could be easily obtained by a modal analysis whereas the latter requires a
pushover analysis. Other forms of engineering judgement are employed in selecting the predictor
variables. For example, while the first modal period has a relatively low importance score, they

142
are known to be essential for predicting the performance of low-rise buildings (e.g., stories <= 3).
With these considerations, the first-round variable selection is to remove all variables in
the building information category except the floor height ratio and all predictors obtained from
nonlinear static analysis except the strength ratio. Consequently, 24 predictors are left. Then a
random forest model is trained with these 24 predictors as inputs to predict the story drift demands.
The trained model is further validated to examine to what extent the accuracy is reduced after
removing these 11 predictors and the feature importance score is updated. Subsequently, a new-
round of variable selection is conducted. This process is repeated until the validation accuracy
significantly decreases (e.g., the drop in 𝐷10% exceeds 5%), or all predictors left are deemed to be
essential based on engineering judgement. The finalized predictor set for the low-to-mid-rise
buildings includes 15 variables: h𝑖/𝐻 , 𝜙1– 𝜙4 , 𝑀𝑀𝑃1– 𝑀𝑀𝑃4 , 𝑆𝑎(𝑇), 𝑆𝑎(𝑇1), 𝑆𝑑(𝑇), 𝑆𝑑(𝑇1),
𝑆𝑑(𝑇2), and 𝑆.
The importance scores of the 35 predictors for the high-rise buildings are presented in
Figure 6.12. Unlike the observations for low-to-mid-rise buildings, all intensity measures except
𝑆𝑑(𝑇3) and 𝑆𝑑(𝑇4) have a significant influence (importance score >= 0.10). Meanwhile, the floor
height ratio and strength ratio are also essential. An iterative variable selection process is
performed and the finalized set of predictors includes 18 variables: h𝑖/𝐻, 𝜙1– 𝜙4, 𝑀𝑀𝑃1– 𝑀𝑀𝑃4,
𝑆𝑎(𝑇), 𝑆𝑎(𝑇1), 𝑆𝑎(𝑇2), 𝑆𝑎(𝑇3), 𝑆𝑎(𝑇4), 𝑆𝑑(𝑇), 𝑆𝑑(𝑇1), 𝑆𝑑(𝑇2), and 𝑆.

143
(a)
(b)
(d)
(d)
Figure 6.12 Normalized importance scores of the 35 predictors for the high-rise buildings: (a)
building information, (b) modal information, (c) spectral parameters, and (d) nonlinear static
analysis parameters
6.4.3.3 Reduced-Order MLDD Model
While the MLDD model simplifies the seismic drift demand estimation to a great extent,
it still requires 15 and 17 predictors for low-to-mid-rise and high-rise buildings, respectively.
Fourteen of these parameters (𝜙1– 𝜙4, 𝑀𝑀𝑃1– 𝑀𝑀𝑃4 , 𝑆𝑎(𝑇1), 𝑆𝑎(𝑇2), 𝑆𝑎(𝑇3), 𝑆𝑎(𝑇4), 𝑆𝑑(𝑇1),
and 𝑆𝑑(𝑇2)) rely on a modal analysis which requires constructing a linear elastic structural model.
To explore whether the purely data-driven model could be used when no structural model is
available, a “reduced-order” MLDD model is developed using nine predictors (𝑇, 𝑆𝑎(𝑇), 𝑆𝑑(𝑇),
h𝑖/𝐻 , 𝑁𝑠 , 𝑊𝑏 , 𝐷𝐿𝑓𝑙𝑜𝑜𝑟 , and 𝐷𝐿𝑟𝑜𝑜𝑓 ). None of these parameters require structural

144
modeling/analysis and all are available during the preliminary design stage. The training and
validation results show that the 𝐷10% and 𝐷25% are higher than 77% and 97%, respectively,
illustrating that the model has a reasonably high level of accuracy for these two datasets.
6.4.4 ML-based EMKY Model (ML-EMKY)
An ML-based EMKY model is developed in the current study. This approach can be
viewed as an improvement (based on later results) of the statistically adjusted EMKY model
presented earlier. As shown in Figure 6.13, the overall workflow involved in the model
development could be divided into mechanic-based, transition, and statistical learning parts. First,
an elastic MDOF model of the building is subjected to the pseudo lateral force determined using
Equation (5-3) of FEMA P-58 [4] and the associated story drifts are recorded. Subsequently, the
ratios between the drift demands from NRHAs and the elastic MDOF analysis are computed. These
ratios, which are defined as “amplification” factors, are unique to each story. In the last step, an
ML model is used to establish a relationship between the original 35 predictor variables and the
MDOF elastic drift amplification factor. The training and validation results show that the 𝐷10%
and 𝐷25% are greater than 96% and 99%, respectively, demonstrating good overall performance
on these two datasets.
Figure 6.13 Workflow for developing the ML-EMKY model
The importance scores for the 35 original predictors reveal that the floor height ratio is the

145
dominating feature. For low-to-mid-rise and high-rise buildings, the second most important
features are 𝑆𝑎(𝑇) and 𝑆𝑑(𝑇1) , respectively. A variable selection process is performed and
eventually 12 predictors are used: 𝑇1, h𝑖/𝐻, 𝜙1– 𝜙4, 𝑀𝑀𝑃1~𝑀𝑀𝑃4, 𝑆𝑎(𝑇), and 𝑆𝑑(𝑇).
The overall workflow for applying the ML-EMKY, MLDD and reduced-order MLDD
models in practice is presented in Figure 6.14. It assumes that the basic building design information
(e.g., member sizes, design spectra, and building dimension) and an elastic structural model are
available. The pseudo lateral force, spectral parameters, floor height ratio, and modal properties
are then obtained based on the design constraints and modal analysis. Subsequently, the pseudo
lateral force is applied to the MDOF model to obtain the elastic story drift demands. The floor
height ratio and modal properties are used as inputs to the random forest algorithm and the
amplification factors are generated. Finally, the seismic drift demand is predicted by multiplying
the elastic story drift demand with the story-specific amplification factor. The workflow for the
MLDD model is similar to the ML-EMKY model. The main difference is that the nonlinear drift
demands are obtained directly from the user inputs (without intermediate elastic drift demands).
For the reduced order MLDD model, there is a direct path from the building information (via the
random forest model) to the nonlinear drift demands without the need for structural modeling and
analysis on the part of the user.

146
Figure 6.14 Workflow involved in applying the ML-EMKY, MLDD and Reduced Order MLDD
models
6.5 Comparative Assessment Among Existing and Newly Developed Models
The performance of the existing and newly developed (in this study) models is evaluated
against a testing dataset, which includes the seismic responses for 100 SMRFs subjected to three
groups of site-specific ground motions selected based on the SLE, DBE, and MCE hazard levels.
The shear and flexural beam theory [65,66] and statistically adjusted spectral displacement [63]
models do not provide estimates of the full drift profile and are therefore not evaluated.
6.5.1 Evaluating the MLDD and “Reduced-Order” MLDD Models
The predictive performance of the final MLDD model is evaluated against the testing
dataset and the results are shown in Figure 6.15 (where 1131 story drift data points are included)
and Figure 6.16 (where a total of 1680 data points are included). The data points in Figure 6.15(a)
are located at the upper left side of the reference line and the histogram (Figure 6.15(b)) is left
skewed, which indicates that the MLDD model tends to underestimate the drift demands in low-
to-mid-rise buildings under all three intensity levels. This observation is also confirmed by the fact

147
that the mean values summarized in Table 6.2 are all less than zero. For the high-rise buildings,
Figure 6.16 shows that the MLDD model systematically underestimates the MCE-level demands
but overestimates the DBE-level demands. Meanwhile, it provides an unbiased estimation at the
SLE level. These observations are confirmed by the positive, negative, and zero values for the
mean relative difference at the MCE, DBE, and SLE hazard levels, respectively (See Table 6.2).
(a)
(b)
Figure 6.15 Predictive performance evaluation for the MLDD model applied to the low-to-mid-
rise buildings: (a) NRHA-based versus model predicted story drift demands and (b) the
distribution of relative difference between NRHA-based and model predicted story drifts
(a)
(b)
Figure 6.16 Predictive performance evaluation for the MLDD model applied to the high-rise
buildings: (a) NRHA-based versus model predicted story drift demands and (b) the distribution
of relative difference between NRHA-based and model predicted story drifts

148
Table 6.2 Multi-Metric Performance Evaluation for the MLDD Model
Building groups Indicators Testing at MCE Testing at DBE Testing at SLE
Low-to-midrise
buildings
𝑀𝐴𝑅𝐷 0.12 0.08 0.10
𝜇 -0.05 -0.07 -0.04
𝜎 0.19 0.15 0.16
𝐷10% 38.73% 55.70% 49.60%
𝐷25% 84.35% 89.92% 88.86%
Slope of linear
fitting 𝑦 = 1.11𝑥 𝑦 = 1.04𝑥 𝑦 = 0.99𝑥
𝑀𝑆𝐸 8.63 × 10−6 3.48 × 10−6 1.38 × 10−6
𝑅2 0.67 0.68 0.64
High-rise
buildings
𝑀𝐴𝑅𝐷 0.10 0.10 0.10
𝜇 -0.10 0.05 0.00
𝜎 0.13 0.17 0.11
𝐷10% 43.04% 46.43% 47.32%
𝐷25% 86.96% 83.04% 93.53%
Slope of linear
fitting 𝑦 = 1.14𝑥 𝑦 = 0.98𝑥 𝑦 = 1.03𝑥
𝑀𝑆𝐸 3.99 × 10−6 1.52 × 10−6 3.00 × 10−7
𝑅2 0.60 0.56 0.55
The performance metric values for the MLDD model are summarized in Table 6.2. For
low-to-mid-rise buildings, all metrics except 𝜎 and 𝑀𝑆𝐸 show that the model performs best at the
DBE level, whereas for the high-rise buildings, it performs best at the SLE level. The value of 𝜎
is approximately the same across the three intensity levels and building sub-groups, indicating that
the MLDD model is relatively stable in terms of the dispersion. When evaluated based on 𝑀𝑆𝐸,
the model has the best performance for both building groups at the SLE level. As noted earlier, the
𝑀𝑆𝐸 is very sensitive to the magnitude of the predicted value. The SLE drift demands are
relatively small (compared to the DBE and MCE demands) and thus the associated 𝑀𝑆𝐸 value is
always smallest. This observation demonstrates the inability of 𝑀𝑆𝐸 to reflect the actual model
performance.
The performance metric values for the reduced order MLDD model are summarized in

149
Table 6.3. All metrics except 𝜎 and 𝑀𝑆𝐸 reveal that it has a relatively low accuracy in estimating
MCE-level demands in low-to-mid-rise buildings and DBE-level demands in tall buildings. The
value of 𝜎 suggests that the model has a higher error dispersion at the DBE level for the high-rise
buildings. Despite the performance being worse than that of the MLDD model (Table 6.2), the
reduced order MLDD model is still deemed acceptable for use in the preliminary design stage with
the understanding that the estimation can be improved with more predictors when the results from
a modal analysis become available.
Table 6.3 Multi-Metric Performance Evaluation for the Reduced-Order MLDD Model
Building groups Indicators Validation at
MCE Validation at DBE Validation at SLE
Low-to-midrise
buildings
𝑀𝐴𝑅𝐷 0.17 0.09 0.11
𝜇 -0.11 -0.02 0.01
𝜎 0.18 0.15 0.19
𝐷10% 28.65% 52.25% 43.77%
𝐷25% 72.94% 90.45% 82.76%
Slope of linear
fitting 𝑦 = 1.18𝑥 𝑦 = 1.05𝑥 𝑦 = 1.02𝑥
𝑀𝑆𝐸 1.24 × 10−5 3.55 × 10−6 4.12 × 10−7
𝑅2 0.63 0.68 0.50
High-rise
buildings
𝑀𝐴𝑅𝐷 0.11 0.21 0.11
𝜇 -0.08 0.16 0.11
𝜎 0.12 0.21 0.17
𝐷10% 43.21% 18.21% 43.75%
𝐷25% 91.43% 59.82% 76.96%
Slope of linear
fitting 𝑦 = 1.12𝑥 𝑦 = 0.88𝑥 𝑦 = 0.90𝑥
𝑀𝑆𝐸 3.10 × 10−6 3.12 × 10−6 1.25 × 10−7
𝑅2 0.64 0.50 0.49
6.5.2 Evaluating the ML-EMKY Model
The performance metric values for the ML-EMKY model are summarized in Table 6.4.
For the low-to-mid-rise building group, the 𝐷10% and 𝐷25% consistently increase from MCE to
SLE, suggesting that the model performs best at the SLE level. For high-rise buildings, all metrics

150
except 𝐷10% show nearly the same value across the three intensity levels. The 𝐷10% metric
indicates that the model has a relatively low performance in estimating the DBE-level drift
demands. This observation partially confirms the superiority of 𝐷𝑋% as a performance evaluation
metric. An interesting phenomenon observed in Table 6.4 is that the value of σ does not vary
significantly across the different intensities and building sub-groups, implying the proposed model
is “stable” in predicting demands for buildings with different heights under various hazard levels.
Table 6.4 Multi-Metric Performance Evaluation for ML-EMKY
Building groups Indicators Testing at MCE Testing at DBE Testing at SLE
Low-to-mid-rise
buildings
𝑀𝐴𝑅𝐷 0.10 0.07 0.06
𝜇 0.08 0.00 -0.01
𝜎 0.10 0.10 0.09
𝐷10% 48.28% 67.37% 76.39%
𝐷25% 95.76% 98.94% 98.67%
Slope of linear
fitting 𝑦 = 0.93𝑥 𝑦 = 1.00𝑥 𝑦 = 1.03𝑥
𝑀𝑆𝐸 3.19 × 10−6 1.40 × 10−6 1.20 × 10−7
𝑅2 0.89 0.86 0.86
High-rise
buildings
𝑀𝐴𝑅𝐷 0.08 0.11 0.08
𝜇 -0.03 -0.06 0.04
𝜎 0.11 0.13 0.10
𝐷10% 57.86% 49.11% 55.89%
𝐷25% 95.36% 93.39% 98.04%
Slope of linear
fitting 𝑦 = 1.03𝑥 𝑦 = 1.06𝑥 𝑦 = 0.96𝑥
𝑀𝑆𝐸 1.75 × 10−6 1.23 × 10−6 4.17 × 10−8
𝑅2 0.70 0.59 0.68
6.5.3 Evaluating the PSKY Model
The performance metric values for the PSKY model are summarized in Table 6.5. In
general, all the listed metrics consistently show that PSKY has equally poor performance for the
two building groups and across the three intensity levels. More specifically, 𝐷10% and 𝐷25% values
are zeros or near-zeros in all cases.

151
Table 6.5 Multi-Metric Performance Evaluation for PSKY
Building groups Indicators Testing at MCE Testing at DBE Testing at SLE
Low-to-mid-rise
buildings
𝑀𝐴𝑅𝐷 3.75 3.61 3.67
𝜇 4.46 4.33 4.68
𝜎 1.85 2.03 2.75
𝐷10% 0.00% 0.00% 0.00%
𝐷25% 0.00% 0.00% 0.00%
Slope of linear
fitting 𝑦 = 0.16𝑥 𝑦 = 0.15𝑥 𝑦 = 0.11𝑥
𝑀𝑆𝐸 5.60 × 10−3 4.10 × 10−3 7.06 × 10−4
𝑅2 -1.50 -1.34 -1.09
High-rise
buildings
𝑀𝐴𝑅𝐷 2.57 2.46 2.35
𝜇 2.55 2.44 2.17
𝜎 0.39 0.53 0.38
𝐷10% 0.00% 0.00% 0.00%
𝐷25% 0.00% 0.00% 0.00%
Slope of linear
fitting 𝑦 = 0.28𝑥 𝑦 = 0.30𝑥 𝑦 = 0.31𝑥
𝑀𝑆𝐸 4.73 × 10−4 2.18 × 10−4 1.14 × 10−5
𝑅2 0.33 0.11 0.04
6.5.4 Evaluating the Statistically Adjusted EMKY Model
The performance metric values for the statistically adjusted EMKY model are summarized
in Table 6.6. With the exception of the 𝑀𝑆𝐸, the best performance for the low-to-mid-rise and
high-rise buildings is achieved at the DBE and MCE level, respectively. Additionally, the 𝐷25%-
based accuracy at the MCE level for both building groups is lower than the SLE and DBE estimates.
This is because the structural response under MCE is highly nonlinear, which is not well-captured
by the adopted linear regression model. The metrics listed in Table 6.6 also show that the
statistically adjusted EMKY model generally provides better seismic drift estimates for low-to-
mid-rise buildings compared to high-rise buildings. This is attributed to the fact that the model
only accounts for parameters relevant to the first mode (i.e., 𝑇1 and 𝑆𝑎(𝑇1)) and does not capture
the higher mode effects that are significant for high-rise buildings.

152
Table 6.6 Multi-Metric Performance Evaluation for the Statistically Adjusted EMKY Model
Building groups Indicators Testing at MCE Testing at DBE Testing at SLE
Low-to-mid-rise
buildings
𝑀𝐴𝑅𝐷 0.16 0.10 0.20
𝜇 0.19 0.00 -0.16
𝜎 0.24 0.16 0.13
𝐷10% 33.16% 47.21% 18.04%
𝐷25% 65.78% 90.98% 71.88%
Slope of linear
fitting 𝑦 = 0.86𝑥 𝑦 = 1.01𝑥 𝑦 = 1.16𝑥
𝑀𝑆𝐸 1.40 × 10−5 4.05 × 10−6 6.54 × 10−7
𝑅2 0.55 0.60 0.49
High-rise
buildings
𝑀𝐴𝑅𝐷 0.24 0.17 0.13
𝜇 -0.21 -0.14 -0.09
𝜎 0.15 0.14 0.15
𝐷10% 14.46% 28.04% 35.54%
𝐷25% 53.21% 75.00% 85.00%
Slope of linear
fitting 𝑦 = 1.30𝑥 𝑦 = 1.19𝑥 𝑦 = 1.11𝑥
𝑀𝑆𝐸 8.75 × 10−6 2.77 × 10−6 1.25 × 10−7
𝑅2 0.36 0.44 0.18
6.5.5 Comparing the Predictive Performance and Required User-Effort Among Different
Models
The existing and newly developed simplified seismic drift demand estimation models fall
into a spectrum of methodologies where mechanics-based models are located at one end and purely
data-driven models are on the other end. Between these two extremes, there are hybrid models that
integrate both mechanics-based and data-driven techniques. As shown in Figure 6.17, the models
based on shear and flexural beam theory and PSKY belong to the category of purely mechanics-
based models. The MLDD and reduced-order MLDD models developed in this study are primarily
data-driven. The statistically adjusted EMKY and ML-EMKY models are developed based on a
combination of mechanics-based and statistical learning methods and are therefore considered
hybrid approaches.

153
Figure 6.17 A spectrum of models for simplified seismic drift demand estimation
To compare the performance of the various models, 𝐷10% values for the low-to-mid-rise
and high-rise buildings are shown in Figure 6.18, from which several conclusions can be drawn:
First, the purely mechanics-based model (PSKY) showed poor performance having almost zero
𝐷10% at all intensity levels. The statistically adjusted EMKY model performed reasonably well.
Across all hazard levels, the 𝐷10% values are in the range of 20% to 50% and 15% to 40% for the
low-to-mid-rise and high-rise building datasets, respectively. Second, the hybrid model developed
in this study (ML-EMKY) shows the best performance with 𝐷10% values greater than 50% across
all intensity levels in both building groups. Last, the MLDD model developed in the current study
generally outperforms the existing models (PSKY and EMKY) with 𝐷10% values larger than 45%
in all cases. The 𝐷10% value of the reduced-order MLDD model is between 20% and 50%, which
is comparable to the previously developed statistically adjusted EMKY model. Overall, the
comparison suggests that models integrating both mechanics-based and statistical learning
outperform those that are purely data-driven or mechanics-based (with simplifying assumptions).

154
(a)
(b)
Figure 6.18 Comparing the performance based on 𝐷10% across the existing and newly developed
models for the (a) low-to-mid-rise and (b) high-rise buildings
Figure 6.19 compares the predictive performance and required effort (on the part of the
user) for the newly developed and existing models considered in this study. The reduced-order
MLDD model requires the least effort as the results generated by any type of structural analysis
(e.g., modal analysis, linear elastic analysis) are not needed. Meanwhile, this model provides

155
estimates of seismic drift demands that are comparable to those generated by the previously
developed statistically adjusted EMKY model, which makes it useful during the preliminary
design stage when no structural analysis results are available. In contrast, all other models could
only be applied once the elastic structural model has been developed. PSKY requires the greatest
effort as it requires performing nonlinear response history analysis, but it has the lowest accuracy.
The effort associated with the statistically adjusted EMKY, ML-EMKY, and MLDD models, fall
between the aforementioned two extremes since they only rely on linear elastic analysis, which is
typically incorporated as part of the conventional design process.
Figure 6.19 Performance versus required effort for various seismic drift demand estimation
models
6.6 Summary
A spectrum of simplified methods for estimating seismic drift demands is presented and
evaluated. On one end of the spectrum are fully mechanics-based approaches that are derived
solely based on engineering principles. On the other end are purely data-driven models that are
established by applying statistical and machine learning methods to a parametric dataset of drift
demands generated from nonlinear response history analyses (NRHAs). Between these two

156
extremes, there are hybrid methods that integrate both fundamental mechanics and
statistical/machine learning techniques. Four existing methods that fall within this spectrum of
approaches are reviewed, and their benefits and drawbacks are discussed. They are based on shear
and flexural beam theory, an elastoplastic single-degree-of-freedom system with known yield
strength (PSKY), statistically adjusted spectral displacement, and the statistically adjusted
response of a linear elastic multi-degree-of-freedom system with known yield strength (EMKY).
A framework for developing hybrid and/or data-driven models to estimate structural
responses under extreme events is established. A systematic step-to-step procedure is presented
that is agnostic to the type of demand parameter (e.g., story drifts and floor accelerations) and
lateral-force resisting system being considered. Meanwhile, the advantages and limitations of
different metrics used for evaluating model performance are discussed and a new metric 𝐷𝑋%
(defined as the fraction of the dataset whose relative difference does not exceed 𝑋%) is proposed.
The framework is then used to develop purely data-driven and hybrid models for estimating
seismic drift demands in steel special moment resisting frames (SMRFs). These two models are
described as (i) machine learning based and purely data-driven (MLDD) and (ii) machine learning
based adjusted response of an EMKY (ML-EMKY). Both are formulated based on a dataset of
seismic structural responses from 621 modern code-based SMRF designs subjected to 240 ground
motions. During the model development process, the sensitivity of the model performance to 35
potential predictor variables is investigated. For the hybrid model, the floor height ratio (defined
as the ratio of the height of floor 𝑖 to the total building height) and intensity measures (𝑆𝑎(𝑇) and
𝑆𝑑(𝑇1)) are the two most influential types of predictors, whereas, in the purely data-driven model,
the intensity measure 𝑆𝑎(𝑇1) alone dominates the response estimation.
Finally, a comparative assessment of the predictive performance among the existing and

157
newly developed models is performed. More specifically, previously developed PSKY and
statistically adjusted EMKY models and newly developed MLDD and ML-EMKY models, are
evaluated on a testing dataset including the responses of 100 SMRFs subjected to three sets of site-
specific ground motions selected based on the service-level earthquake (SLE), design-based
earthquake (DBE), and maximum considered earthquake (MCE) levels. The evaluation results
suggest that the hybrid model generally has a higher accuracy than the purely data-driven or
mechanics-based models. A comparison of the level of the effort required to apply the different
models reveals that the mechanics-based model (PSKY) requires the greatest effort whereas the
reduced-order MLDD model needs the least effort. The latter could be applied during the
preliminary design stage.

158
7. Surrogate Models for Probabilistic Distribution of Engineering
Demand Parameters of SMRF Buildings under Earthquakes
7.1 Introduction
Steel moment-resisting frames (SMRFs) are often used as a part of the lateral force-
resisting systems (LFRS’s) in building structures designed to resist earthquakes and/or winds. Steel
special moment frames is one of the few LFRS options that is permitted for tall buildings exceeding
160 ft (48.77 m) in the regions of high seismicity according to ASCE 7-16 [30]. It is well-known
that SMRFs are capable of providing significant inelastic deformation capacity through flexural
yielding at the beam ends and limited yielding in panel zones, which enables ductile response in
moderate-to-severe earthquakes. A key advantage of SMRFs is that they do not require structural
walls and diagonal braces, and thus offer an unobstructed line of sight, which provides flexibility
in architectural design. A recent study [31] indicated that SMRFs typically impose smaller forces
on foundations compared with other structural systems, resulting in more economic foundation
designs. Owning to the aforementioned advantages, SMRFs have been widely adopted in industrial
plants, commercial buildings, and some skyscrapers as part of a dual LFRS.
The widely accepted approach for estimating the seismic structural response is to perform
a nonlinear response history analysis (NRHA) on a detailed analytical model subjected to a suite
of representative ground motions. However, NRHA often relies on a carefully calibrated structural
model and in some cases, the analysis process can be time-consuming, making the effort associated
with detailed modeling and analysis unfeasible. For example, when the 2nd performance-based
earthquake engineering (PBEE) framework is used to assess regional seismic impacts, performing
NRHAs for tens or hundreds of thousands or even millions of buildings may be impractical. In
such a situation, a simplified process that provides rapid and reasonable estimates of seismic

159
demands is much needed.
Surrogate models have been proven to be useful for providing rapid and reliable estimation.
They are typically constructed using data-driven approaches on a representative dataset that is
derived from a mechanics-based simulation model. Through the training process, surrogate models
mimic the relationship between multiple input parameters (or features) and the outcomes (or
responses). There have been extensive applications of surrogate models in some areas such as
mechanical engineering [120], environmental engineering [121], and hydrology [122], as well as
earthquake engineering [4,67,106,107,123]. Some of these proposed surrogate models [4,63] rely
on a combination of mechanics-based and statistical approaches whereas others [67,106,107,123]
are completely based on the machine learning techniques (e.g., artificial neural networks).
The aforementioned studies have greatly enhanced our ability to rapidly estimate seismic
structural response demands. However, the following limitations still exist in their development
and implementation. First, the dataset used to calibrate and/or validate the surrogate models are
relatively small. Most of the available surrogate models are validated against three to ten buildings
subjected to a maximum of 100 ground motions. Second, for the models that rely on statistical
analyses, none of them utilized a rigorous performance evaluation, which brings into question of
the breadth of their applicability. Additionally, most of these existing simplified models target a
single type of engineering demand parameter (EDP) and fail to provide dispersion or covariance
within and between different EDPs, which prevents their application in economic loss assessment
based on the FEMA P-58 [4] framework. It is worth noting that stakeholders are typically more
interested in economic loss indicators (e.g., expected annual loss) rather than the EDPs.
To address the aforementioned limitations, a set of parametric and non-parametric
surrogate models that are able to estimate the central tendency of EDPs (including peak story drifts,

160
peak floor accelerations, and residual story drifts) are developed based on a comprehensive
database of 621 SMRFs and associated seismic responses. The suggested values for the variance
of each EDP and the correlation between different EDPs are also provided. The remainder of this
paper begins by introducing the dataset used for developing the surrogate models. Then the
development details and implementation of the parametric and non-parametric surrogate models
are presented. The predictive performance of the proposed surrogate models are evaluated and
compared with the existing simplified analysis procedure specified in FEMA P-58 [4].
Subsequently, the terms in the covariance matrix that describe the possible correlation among
different EDPs are quantitatively investigated. Then, the EDPs generated from the surrogate model
and assumed covariance matrix are used to calculate the economic loss for 100 SMRF buildings
and further compared with those determined using the EDPs obtained from NRHAs.
7.2 Dataset of SMRFs
To create the database required for developing the surrogate model, a Python-based
computational platform that automates seismic design for SMRFs, nonlinear structural model
construction, and seismic response simulation is developed using the object-oriented programming
paradigm. This automated seismic design and analysis (AutoSDA) platform [124] takes the
necessary input parameters (including the building geometry, load, and site information), generates
structural designs (including section sizes for each component, demand-to-capacity ratios, and
joint connection details), constructs the corresponding nonlinear structural models, and performs
the nonlinear structural analysis in OpenSees [2].
Based on the AutoSDA platform, a database [54,55] that comprises four modules (code-
conforming seismic designs, ground motions, nonlinear structural models, and structural responses)
is developed, as shown in Figure 7.1. The “code-conforming seismic designs” module includes the

161
design details (e.g., building configurations, beam and column section sizes, and joint connection
details) for 621 SMRFs with various geometric configurations and gravity loads. The distributions
of building geometries and gravity loads are illustrated in Figure 7.2. The entire design dataset
includes 81 one-story, 162 five-story, 162 nine-story, 128 fourteen-story, and 81nineteen-story
buildings (Figure 7.2(a)). The distributions of bay width and first-to-typical story height ratio are
relatively uniform (Figure 7.2(b) and (c)) across all buildings. Figure 7.2(d) indicates that the
buildings with more bays are more common in the dataset, which is due to the fact that adopting
less bays for taller buildings results in unrealistic or unfeasible designs. Figure 7.2(e) and (f) shows
that less designs are developed for the case with higher gravity load. The 𝑃 − Δ effect induced by
high gravity load is more severe and thus also produces designs that are sometimes unfeasible. The
distribution of building periods (including the periods estimated using the equation in ASCE 7-16
[30] and 1st-4th periods obtained from the modal analysis) is shown in Figure 7.3. The ASCE- and
first-mode periods for the buildings range from 0.2 sec to 2.5 sec and 0.35 sec to 2.6 sec,
respectively. Based on the distribution of these parameters, the designs in this dataset could be
considered as representative of a broad range of designs produced in practice.
The “ground motions” module contains two sets of acceleration records. The first set
includes the 240 ground motion records assembled by Miranda [71], which is a representative of
ground motions in high seismicity zones. The second batch of ground motions includes three
record sets obtained from a site-specific selection procedure [72] at three hazard levels: service-
level, design-based, and maximum considered earthquakes (SLE, DBE, and MCE), which
correspond to return periods of approximately 43, 475, and 2475 years, respectively. Figure 7.4
illustrates the distribution of the spectral acceleration evaluated at the first-mode period (𝑆𝑎(𝑇1)).
The 𝑆𝑎(𝑇1)) for the first and second batch of ground motions ranges from 0.0 g to 2.5 g and 0.01

162
g to 3.2 g, respectively, which is considered to be wide enough to cover intensities in regions of
high seismicity (e.g., Los Angeles Metropolitan area).
Figure 7.1 Overview of the dataset

163
(a)
(b)
(c)
(d)
(e)
(f)
Figure 7.2 The distributions of building geometries and gravity loads in the database: (a) number
of stories, (b) bay widths, (c) first/typical story height ratios, (d) number of bays, (e) typical floor
dead loads, and (f) roof dead loads

164
Figure 7.3 The Distribution of building periods
Figure 7.4 The distribution of spectral acceleration evaluated at the first-mode period
The “nonlinear structural models” module includes 621 two dimensional (2D) numerical
models constructed in OpenSees [2] that are set up to perform both static and dynamic analyses.
The nonlinear behavior of beams and columns are simulated using the concentrated approach
which consists uses a linear elastic element with inelastic hinges placed at both ends. The modified
Ibarra-Medina-Krawinkler material model [22] is adopted to describe the flexural behavior of the
inelastic hinges. Additionally, the inelastic behavior of the panel zone is considered by modeling
it with a combination of eight elastic elements and zero-length rotational springs [27].
The “structural responses” module includes two sub-datasets. The first includes the
responses of the 621 SMRFs subjected to the 240 ground motions, resulting in 621 × 240 =

165
149,040 peak story drifts profiles, peak floor acceleration profiles, and residual story drift profiles.
The other contains the response of a subgroup of 100 (including 13 one-story, 26 five-story, 26
nine-story, 21 fourteen-story, and 14 nineteen-story) SMRFs subjected to three sets of site-specific
ground motions at the SLE, DBE, and MCE hazard levels. The EDPs are assumed to follow a
lognormal distribution. An example of peak story drift data points and the fitted lognormal
distribution is illustrated in Figure 7.5. More details on the development and content of the
database can be found in Chapter 4.
Figure 7.5 A schematic plot for fitting the peak story drift with lognormal distribution
Based on the findings in prior studies [4,67,123], a total of 35 variables are identified as
having an influence on the engineering demand parameters. As shown in Table 7.1, these 35
predictors are grouped into four categories based on their sources: building information, modal
analysis results, spectral intensity parameters, and nonlinear pushover features. There are 7
predictors in the category of building information: the number of stories, number of bays, floor
height ratio (that is defined as the ratio of floor height 𝑖 to the total building height), bay width,
floor dead load, roof dead load, and ASCE period determined using Equation (12.8-7) specified in
ASCE 7-16 [30]. The modal analysis result category includes 12 predictors: the first- to fourth-
mode periods, associated modal shapes, and modal mass participation factors. The modal shapes

166
are scaled such that the maximum element equals to 1.0. The 10 spectral intensity parameters
include the spectral acceleration and displacement evaluated at ASCE period and first- to fourth-
mode periods. It is worth noting that some of these parameters (e.g., 𝑆𝑎(𝑇1) and 𝑆𝑑(𝑇1)) are
linearly dependent and they will be removed later in a variable selection process (which is
presented in the following sections). The remaining 6 predictors are obtained from nonlinear
pushover analysis: the force (that is normalized with respect to the seismic weight) and roof drift
at the yield point, the peak force and associated roof drift, the force at 2% roof drift, and the
strength ratio determined using Equation (5-6) in FEMA P-58 [4].
Table 7.1 Initial set of predictor variables considered for the surrogate model
Category Predictors Symbol Number of
predictors
Building
information
Number of stories 𝑁𝑠
7
Number of bays 𝑁𝑏
Bay width 𝑊𝑏
Floor height ratio ℎ𝑖/𝐻
Typical floor dead load 𝐷𝐿𝑓𝑙𝑜𝑜𝑟
Roof dead load 𝐷𝐿𝑟𝑜𝑜𝑓
Fundamental period 𝑇𝑎
Modal
analysis
results
First- to fourth-mode periods 𝑇1– 𝑇4
12 First- to fourth-mode shapes 𝜙1
– 𝜙4
First to fourth modal mass participation factors 𝑀𝑀𝑃1– 𝑀𝑀𝑃4
Spectral
intensity
parameters
Spectral accelerations evaluated at empirical period and
first- to fourth-mode periods
𝑆𝑎(𝑇𝑎)
𝑆𝑎(𝑇1)– 𝑆𝑎(𝑇4) 10
Spectral displacements evaluated at empirical period and
first- to fourth-mode periods
𝑆𝑑(𝑇𝑎)
𝑆𝑑(𝑇1)– 𝑆𝑑(𝑇4)
Nonlinear
pushover
features
Normalized force and drift at yielding point and peak
point 𝐹𝑦, Δ𝑦, 𝐹𝑝, Δ𝑝
6 Normalized force at a drift of 2% 𝐹2%
The strength ratio 𝑆
This study aims to estimate the overall probabilistic distribution of EDPs (including peak
story drifts, peak floor accelerations, and residual story drifts). According to FEMA P-58 [4], the

167
EDPs can be modeled using a joint lognormal distribution, which could be described by a vector
of logarithmic mean values (𝜇𝑙𝑛 𝐸𝐷𝑃 ) and a covariance matrix (𝛴ln 𝐸𝐷𝑃 ). In other words, the
response variables predicted by the surrogate model are 𝜇𝑙𝑛 𝐸𝐷𝑃 and 𝛴ln 𝐸𝐷𝑃. It is worth noting that,
for a lognormal distribution, the mean of the variable in log space (𝜇𝑙𝑛 𝐸𝐷𝑃) can be obtained by
taking the natural log of the median (𝐸𝐷𝑃0.5).
To compute these two statistical variables (𝐸𝐷𝑃0.5 and 𝛴ln 𝐸𝐷𝑃), the 240 ground motions
are firstly binned based on the 𝑆𝑎(𝑇1). A total of six bins are formed to ensure that none of them
have less than 11 ground motions. Then the structural responses (i.e., EDPs) under the ground
motions in each bin are modeled using a joint lognormal distribution and the median vector and
covariance matrix are computed. As for the response under the three sets of site-specific ground
motions corresponding to the SLE, DBE, and MCE, the EDPs at each hazard level are considered
as one bin and the associated median vector and covariance matrix are directly obtained.
To facilitate the development of the surrogate model, 70% of the data from the analysis of
the 621 SMRFs subjected to the 240 ground motions are assembled to form the training dataset,
which is used to tune the parameters of the surrogate model. The rest 30% data are gathered to
construct the validation dataset, which aims to provide an unbiased estimation of the model fit. All
the data collected from the analysis of the 100 SMRFs subjected to the three sets of site-specific
ground motions are used to establish a testing dataset, which is used to evaluate the predictive
performance of the model.
7.3 Surrogate Model for Probabilistic Distribution of EDPs
Based on the adopted machine learning algorithms, the surrogate models developed in this
study could be divided into two categories: parametric and non-parametric. The parametric model
is based on an explicit mathematical equation to describe the relationship between the predictor

168
and response variables. Consequently, it is relatively straightforward to interpret and thus is
preferred by engineers in practice. However, the parametric models often rely on some
assumptions that can negatively affect their performance. The non-parametric model does not rely
on and assumed functional form and thus have high flexibility. However, they are sometimes
viewed as “black boxes” due to the lack of interpretability. The rest of this section presents the
performance metrics used to evaluate the predictive performance, the details of the development
and implementation of surrogate models, a comparison of the predictive performance among the
different models, and the covariance matrix.
7.3.1 Performance Metrics for Model Evaluation
To quantitively measure the predictive performance of the surrogate model, three metrics
are adopted: the coefficient of determination (𝑅2), median absolute relative deviation (𝑀𝐴𝑅𝐷)
[111], and the fraction of the data points whose relative difference does not exceed 25% (𝐷25%)
[125]. Mathematically, these three metrics are defined as follows:
0.5 0.5,2 1
0.5, 0.5,1
( )1
( )
N
NRHAi
N
NRHA NRHAi
EDP EDPR
EDP EDP
=
=
−= −
−
(7.1)
0.5 0.5,
0.5,
MedianNRHA
NRHA
EDP EDPMARD
EDP
− =
(7.2)
0.5 0.5,
0.5,
25%
countif 25%NRHA
NRHA
EDP EDP
EDPD
N
− = (7.3)
where 𝐸𝐷��0.5 represents the predicted median EDP, 𝐸𝐷𝑃0.5,𝑁𝑅𝐻𝐴 is the actual median
value observed from NRHAs, and 𝐸𝐷𝑃 0.5,𝑁𝑅𝐻𝐴 refers to the average of observed median of EDP
from NRHAs. countif is a function that counts the number of data points satisfying the condition

169
in the square brackets, and 𝑁 is the total number of data points.
𝑅2 is the proportion of the variance in the outcome variable that is captured by the input
variables and a value of 1.0 implies that the model perfectly fits the data points. 𝑀𝐴𝑅𝐷 provides
the central tendency of the relative deviation and a value of 0.0 means that the model provides an
unbiased estimation. 𝐷25% measures the fraction of predicted responses that are within 25% of the
observed values.
7.3.2 Parametric Surrogate Model
For the parametric surrogate model, linear regression [113] is used to build a relationship
between the 35 input variables and the median of EDPs. In linear regression, the response variable
is estimated using the following equation:
ˆy y X = + = + (7.4)
where 𝑦 in this study is the observed central tendency of each EDP obtained from NRHAs
and �� represents the predicted central tendency in logarithm space. 𝑋 is the feature matrix and 𝜀
represents the residual. In the feature matrix, the variable 𝑆𝑎(𝑇1) is log-transformed. Using the
predictors and responses observed from the dataset, the coefficient vector 𝛽 is obtained using the
following closed-form solution:
1( )T TX X X y −= (7.5)
The coefficients used to predict the peak story drift could be obtained using Equation (7.5)
on the training dataset summarized in Table 7.2. It is worth noting that the higher mode effects are
expected to be negligible for low-rise buildings but significant for taller buildings. As such, the
relative importance among the various predictors is different for these two buildings groups.
Therefore, the surrogate models are developed separately for low-to-mid-rise buildings (with less
than 10 stories) and high-rise buildings (with 10 to 19 stories). The training and validation results

170
for these two building groups are visualized in Figure 7.6. There are 14,094 and 20784 data points
in Figure 7.6(a) and (b), respectively. The training data points are located exactly at the reference
line and the validation points are symmetrically located near the reference line, indicating that the
linear regression is able to provide an unbiased estimation on the training and validation dataset
Table 7.2 Initial coefficients of linear regression for predicting the central tendency of peak story
drifts
Feature Low-to-mid-rise buildings High-rise buildings
𝑇𝑎 −7.40 × 10−2 −3.96 × 10−1
𝑇1 −7.31 × 10−1 9.0 × 10−2
𝑇2 −8.42 × 10−1 1.21 × 100
𝑇3 1.09× 100 −1.79× 100
𝑇4 −2.59× 10−1 2.26 × 100
𝑆𝑎(𝑇𝑎) 1.83× 10−1 −1.07 × 100
𝑆𝑎(𝑇1) 1.04× 100 9.32 × 10−1
𝑆𝑎(𝑇2) −8.45× 10−1 6.51 × 10−1
𝑆𝑎(𝑇3) 2.94× 10−1 −5.50 × 10−1
𝑆𝑎(𝑇4) −8.96× 10−2 4.12 × 10−1
𝑆𝑑(𝑇𝑎) −3.32× 10−2 4.79 × 10−2
𝑆𝑑(𝑇1) −2.34× 10−2 −4.44 × 10−2
𝑆𝑑(𝑇2) 2.83× 10−1 1.67 × 10−2
𝑆𝑑(𝑇3) 2.85× 10−2 4.26 × 10−1
𝑆𝑑(𝑇4) −2.05× 10−1 −6.75 × 10−1
ℎ𝑖/𝐻 −2.61× 100 −1.45 × 100
𝑁𝑠 −4.94× 10−2 3.09 × 10−2
𝑊𝑏 3.63× 10−4 2.41 × 10−4
𝑁𝑏 −9.09× 10−3 −1.30 × 10−2
𝐷𝐿𝑓𝑙𝑜𝑜𝑟 −1.30× 10−4 2.93 × 10−4
𝐷𝐿𝑟𝑜𝑜𝑓 5.30 × 10−4 −3.08 × 10−5
𝜙1 2.78 × 100 1.62 × 100
𝜙2 3.11 × 10−4 1.47 × 10−2
𝜙3 2.55 × 10−2 6.37 × 10−2
𝜙4 −1.40 × 10−2 −1.89 × 10−2
Δ𝑦 5.22 × 10−1 4.80 × 10−1
𝐹𝑦 −2.04 × 10−1 −3.26 × 10−1
Δ𝑝 2.14 × 10−4 −4.11 × 10−2
𝐹𝑝 −1.75 × 10−1 −2.97 × 10−2
𝐹2% −2.83 × 10−2 −3.62 × 10−3
𝑀𝑀𝑃1 −1.55 × 100 2.61 × 10−1

171
𝑀𝑀𝑃2 2.02 × 100 3.06 × 100
𝑀𝑀𝑃3 1.57 × 10−1 3.01 × 100
𝑀𝑀𝑃4 −1.24 × 10−2 1.81 × 100
𝑆 −3.65 × 10−2 −1.39 × 10−1
Intercept −0.70 × 100 −2.95 × 100
(a)
(b)
Figure 7.6 Training and validation results for median peak story drift of: (a) low-to-mid-rise
buildings and (b) high-rise buildings.
While the initial set of predictors include 35 variables, not all of them are essential in
producing a good prediction. To reduce the number of predictors required for the linear regression,
a backward variable selection process is performed. To start with, all 35 variables are included in
the model and then the feature with the lowest statistical significance is removed. A new model
with 34 variables is fit and a new round of variable selection process is performed. This process is
repeated until the validation accuracy significantly decreases. The finalized regression equations
for predicting the median peak story drifts (𝑃𝑆𝐷0.5) for low-to-mid-rise and high-rise buildings are
presented in Equations (7.6) and (7.7), respectively.
( )0.5 1 1 1 1exp 2.82 0.59 1.09ln ( ) 1.55 1.73 1.34 0.16ia
hPSD T S T MMP S
H
= − + + − + − −
(7.6)

172
( )1 2 1 2
0.5
1 1
4.40 0.11 1.17 0.93ln ( ) 0.53 ( ) 0.55exp
0.75 0.25 0.11
ia a
hT T S T S T
PSD H
MMP S
− − + + + − = + + −
(7.7)
The relative difference between the predicted and the observed median peak story drift for
the low-to-mid-rise and high-rise building groups is shown in Figure 7.7, respectively. The
difference approximately follows a normal distribution with more than 80% of the data points are
within the range of -20% to +20%. The associated performance metric values are summarized in
Table 7.3. The 𝑅2 for both building groups is higher than 0.9, indicating that the proposed model
could also fit the validation dataset well. Additionally, the 𝑀𝐴𝑅𝐷 is close to 0.0 and 𝐷25% is
higher than 80%, indicating that the proposed regression equation has a high level of accuracy
when predicting the median peak story drift for the validation dataset.
(a)
(b)
Figure 7.7 The distribution of relative difference between the observed and predicted median
peak story drift for the validation dataset: (a) low-to-mid-rise buildings and (b) high-rise
buildings
By adopting a similar process, the regression equations for predicting the median peak floor
acceleration (𝑃𝐹𝐴0.5) and residual story drift (𝑅𝑆𝐷0.5) for low-to-mid-rise and high-rise buildings
are given by:

173
( )0.5 1 1 1 1exp 0.88 0.35 0.71ln ( ) 1.60 1.06 1.86 0.03ia
hPFA T S T MMP S
H
= + + + − − −
(7.8)
( )1 2 1 2 1
0.5
1
0.39 0.34 0.51 0.51ln ( ) 1.19 ( ) 2.48 1.97exp
1.61 0.07
ia a
hT T S T S T
PFA H
MMP S
− − − + + + − = − −
(7.9)
( )1 1 1
0.5
1
6.97 1.07 0.88ln ( ) 3.11 2.67exp
0.91 0.09
ia
hT S T
RSD H
MMP S
− + + − + = − −
(7.10)
( )1 2 1 2
0.5
1 1
7.27 0.25 0.74 0.89ln ( ) 0.08 ( )
exp3.58 2.98 0.51 0.05
a a
i
T T S T S T
RSD hMMP S
H
− + + + − = − + + −
(7.11)
The multiple performance metric values for these regression equations are summarized in
Table 7.3. Similar to the observation for peak story drift, all metrics show that Equations (7.8) and
(7.9) can provide reasonable estimates of the median peak floor acceleration. However, the metrics
in Table 7.3 indicate that the predictive performance for the residual story drift is slightly worse
than that for peak floor acceleration and peak story drift, which is partially because the former is
highly sensitive to the component modeling assumption and therefore not stable enough for the
regression equation to capture the relevant trends [4]. Another reason is that the magnitude of the
median residual story drift is very small (in the order of 10−6 to 10−3). Consequently, even a small
deviation between the predicted and observed values results in a relatively large difference, which
is reflected by the metrics.

174
Table 7.3 Performance evaluation for the parametric model on validation dataset
Building groups Indicator Peak story
drift
Peak floor
acceleration
Residual story
drift
Low-to-mid-rise buildings
𝑅2 0.91 0.92 0.50
𝑀𝐴𝑅𝐷 0.10 0.09 0.19
𝐷25% 83.97% 86.72% 60.52%
High-rise buildings
𝑅2 0.90 0.94 0.62
𝑀𝐴𝑅𝐷 0.09 0.08 0.17
𝐷25% 87.15% 91.49% 68.25%
7.3.3 Non-parametric Surrogate Model
The random forest algorithm [115] is used to develop the non-parametric surrogate model.
It belongs to a family of non-parametric models known as decision trees, which recursively divides
the feature space into subspaces until a termination criterion is met. A schematic view of a decision
tree together with the associated two-feature sample space is presented in Figure 7.8. To construct
this tree, the greedy algorithm [126] is used to determine the optimal split (a combination of the
feature and a specified threshold). After training, the decision tree divided the sample space into
three independent regions (𝑅1, 𝑅2, and 𝑅3) based on the two predictors: 𝑋1 and 𝑋2. The response
predicted by the tree model is the average of the observed responses for all nodes in a specific
region.

175
(a)
(b)
Figure 7.8 A schematic view of a decision tree model: (a) Two-feature sample space split into to
three subspaces and (b) the corresponding decision tree model
A major drawback of the decision tree model is its high sensitivity to the specific training
dataset. This limitation is addressed by generating a number of sub-datasets via the Bootstrap
technique [118] and growing an individual tree on each resampled sub-dataset. Meanwhile, to
reduce the potential correlation among different trees, the greedy algorithm is only applied to a
randomly selected portion of the original predictors at each split. These adjustments relative to the
basic decision tree model define the random forest algorithm. To construct the random forest, the
following parameters need to be tuned via the training process: the number of trees, maximum
depth of each tree, minimum number of samples required to split an internal node, and the
minimum number samples required to be at a leaf node. A schematic representation of random
forest with three trees for a 𝑁-data sample with 𝑝 predictors is shown in Figure 7.9.

176
Figure 7.9 A schematic illustration of the random forest algorithm with three trees for an 𝑁-data
sample with 𝑝 features
The median peak story drifts for low-to-mid-rise and high-rise buildings predicted by the
random forest algorithm are compared with those observed from NRHAs in Figure 7.10(a) and (b),
respectively. All the training and validation data points are clustered around the reference line,
indicating that the random forest algorithm successfully capture the relationship between the input
variables and the median peak story drift. Additionally, the distribution of the relative difference
in Figure 7.11 demonstrates that more than 90% of the validation points have a relative difference
within the range of -10% to +10%, which suggests that the random forest has a high level of
accuracy when predicting the median peak story drift for the validation dataset.

177
(a)
(b)
Figure 7.10 Training and validation results for median peak story drift of (a) low-to-mid-rise
buildings and (b) high-rise buildings
(a)
(b)
Figure 7.11 The distribution of relative difference between the observed and predicted median
peak story drift for the validation dataset: (a) low-to-mid-rise buildings and (b) high-rise
buildings
To quantitatively measure the effect of each predictor, the importance score [119]
generated by random forest is computed. Figure 7.12 shows the importance score (normalized by
the maximum score) of all 35 predictors for the low-to-mid-rise buildings. The spectral
acceleration parameter evaluated at the first-mode period (𝑆𝑎(𝑇1)) has the largest importance score,
which is consistent with the expectation that the first mode typically dominates the response of
low-to-mid-rise buildings. As for the variables in the category of building information, all of them
have near zero importance score except the floor height ratio. Among the predictors obtained from

178
the modal analysis, the first-mode shape (𝜙1) has the highest importance. With the exception of
𝑆𝑎(𝑇) and 𝑆𝑑(𝑇1), all other spectral intensity predictors have negligible importance. As for the
predictors measuring the level of nonlinearity and dissipated hysteretic energy, only the strength
ratio (𝑆) is found to be essential for predictive performance.
Based on the aforementioned importance measurement, a variable selection process is
performed to reduce the number of variables required for predicting the median peak story drift
using the random forest model. The first-round of variable selection is to remove all variables in
the building information category except the floor height ratio. Consequently, 29 predictors are
left. Then a random forest model is trained with these 29 predictors as inputs to predict the median
peak story drift. The trained model is further validated to examine to what extent the accuracy
drops after removing the 6 predictors and the feature importance score is updated. Subsequently,
a new-round of variable selection is performed. This process is repeated until the validation
accuracy significantly decreases. The finalized predictor set for the low-to-mid-rise buildings
includes 9 variables: ℎ𝑖 𝐻⁄ , 𝜙1 –𝜙2 , 𝑀𝑀𝑃1 –𝑀𝑀𝑃2 , 𝑆𝑎(𝑇), 𝑆𝑎(𝑇1 ), 𝑆𝑎(𝑇2), and 𝑆 . A similar
variable selection process is also conducted for the high-rise building group and the finalized
predictors include ℎ𝑖 𝐻⁄ , 𝜙1–𝜙4, 𝑆𝑎(𝑇), 𝑆𝑎(𝑇1)–𝑆𝑎(𝑇4), and 𝑆.

179
(a)
(b)
(c)
(d)
Figure 7.12 Normalized importance scores of the 35 predictors for the low-to-mid-rise buildings:
(a) building information, (b) modal information, (c) spectral parameters, and (d) nonlinear static
analysis parameters
By using a similar development process, the random forest models for predicting the
median peak floor acceleration and residual story drift are obtained and the associated details are
summarized in Table 7.4. The floor height ratio (ℎ𝑖 𝐻⁄ ) and strength ratio (𝑆) are essential for
predicting both peak story drift and residual story drift but not for estimating the peak floor
acceleration. Instead, the number of stories plays a vital role in estimating the acceleration demand.
The number of trees, maximum tree depth, and minimum number samples at an internal node for
all random forest models are 1000, 50, and 2, respectively. The minimum number of samples at a
leaf node is 2 for all models except the ones for estimating the acceleration demand. The

180
performance metrics for the random forest models on validation dataset are summarized in Table
7.5. All metrics indicate that the proposed non-parametric surrogate model has a high level of
accuracy for all EDPs in both building groups.
Table 7.4 Summary of the parameters for the random forest model
EDP Peak story drift Peak floor acceleration Residual story drift
Building
group
Low-to-mid-
rise buildings
High-rise
buildings
Low-to-mid-
rise buildings
High-rise
buildings
Low-to-mid-
rise buildings
High-rise
buildings
Input
variables
ℎ𝑖 𝐻⁄ , 𝜙1,
𝜙2,
𝑀𝑀𝑃1,
𝑆𝑎(𝑇),
𝑆𝑎(𝑇1),
𝑆𝑎(𝑇2), 𝑆
ℎ𝑖 𝐻⁄ , 𝜙1–
𝜙4, 𝑆𝑎(𝑇),
𝑆𝑎(𝑇1)–
𝑆𝑎(𝑇4), 𝑆
𝑁𝑠, 𝜙1–𝜙
3,
𝑀𝑀𝑃1–
𝑀𝑀𝑃3,
𝑆𝑎(𝑇1),
𝑆𝑑(𝑇1)
𝑁𝑠, 𝜙1–𝜙
4,
𝑀𝑀𝑃1–
𝑀𝑀𝑃4,
𝑆𝑎(𝑇1)–
𝑆𝑎(𝑇4)
ℎ𝑖 𝐻⁄ , 𝜙1–
𝜙4, 𝑀𝑀𝑃1–
𝑀𝑀𝑃4,
𝑆𝑎(𝑇),
𝑆𝑑(𝑇1), 𝑆
ℎ𝑖 𝐻⁄ , 𝜙1–
𝜙4, 𝑀𝑀𝑃1–
𝑀𝑀𝑃4, 𝑆𝑎(𝑇
), 𝑆𝑎(𝑇1)–
𝑆𝑎(𝑇4), 𝑆
Number of
trees 1000 1000 1000 1000 1000 1000
Maximum
depth of tree 50 50 50 50 50 50
Minimum
number of
samples at
internal node
2 2 2 2 2 2
Minimum
number of
samples at
leaf node
2 2 1 1 2 2
Table 7.5 Performance evaluation for the non-parametric model on validation dataset
Building groups Indicator Peak story
drift
Peak floor
acceleration
Residual story
drift
Low-to-mid-rise
buildings
𝑅2 0.98 0.99 0.82
𝑀𝐴𝑅𝐷 0.04 0.01 0.10
𝐷25% 97.98% 99.97% 83.08%
High-rise buildings
𝑅2 0.98 0.99 0.93
𝑀𝐴𝑅𝐷 0.03 0.0182 0.07
𝐷25% 99.42% 99.93% 91.44%

181
7.3.4 Comparative Assessment Among Existing and Newly Developed Surrogate Models
Apart from the parametric and non-parametric surrogate models developed in this study,
FEMA P-58 [4] also provides a simplified method to estimate the median demands for peak story
drift, peak floor acceleration, and residual story drift. More specifically, the method provides a set
of empirical equations to compute adjustment coefficients, which are used to correct the elastic
story drift demand and peak ground acceleration to obtain the peak story drift and peak floor
acceleration, respectively. An analytical equation is provided to compute the residual story drift
based on the peak story drift and yielding drift. More details about this simplified analysis
procedure can be found in Chapters 5.3 and 5.4 of FEMA P-58 [4].
The performance of the proposed parametric and non-parametric surrogate models together
with the simplified analysis model recommended by FEMA P-58 [4] is evaluated against the
testing dataset, which includes the seismic responses for 100 SMRFs subjected to three groups of
site-specific ground motions selected based on the SLE, DBE, and MCE hazard levels. Figure 7.13
compares the 𝐷25% values for both the existing and newly developed models on testing dataset.
The comparison indicates that the non-parametric surrogate model has the best performance in
estimating all types of EDPs. The simplified analysis method recommended by FEMA P-58
performs reasonably well in estimating the peak story drift (with 𝐷25% greater than 60%) but
shows poor performance in predicting the acceleration demand and residual story drift (with 𝐷25%
lower than 20%). The performance of the parametric surrogate model is between the
aforementioned two models. Figure 7.13 shows that all models have relatively inferior
performance in estimating the residual drift compared to other two EDPs. One of the main reasons
is that the nonlinear analysis using typical modeling techniques does not result in accurate
assessment of residual drift [4], which prevents the surrogate model from capturing the actual

182
relationship between the predictors and residual drift demand. This limitation could only be
resolved by proposing more advanced component modeling techniques and adopting software (e.g.,
ABAQUS) that supported more detailed finite element analysis, both of which are beyond the
scope of the current study. Another reason is that the magnitude of the residual drift is in the order
of 10−6 to 10−3 and a small deviation between the predicted and the actual value results in a large
error. This is particularly reflected by the zero value of 𝐷25% at the SLE intensity level.
(a)
(b)
(c)
Figure 7.13 Comparing the performance based on 𝐷25% across the existing and newly developed
models for: (a) peak story drift, (b) peak floor acceleration, and (c) residual story drift

183
7.3.5 Estimation of Covariance Matrix
To characterize the complete lognormal distribution of the EDPs, a covariance matrix is
required. The off-diagonal terms in the covariance matrix are a measure of the correlation among
the different EDPs while capturing modeling uncertainty (not considered in the current study) and
record-to-record variability. It is worth noting that the dimension for a covariance matrix is
dependent on the number of stories for a building. More specifically, the EDPs for a building with
𝑁 stories include 𝑁 peak story drifts, 𝑁 + 1 peak floor accelerations, and 𝑁 residual story drift,
which results in a covariance matrix with a dimension of (2𝑁 + 1) × (2𝑁 + 1). Given the large
number of terms included in the matrix, deriving a set of generic equations to estimate each of
these covariance terms is impractical. As a result, this section aims to provide a series of
suggestions regarding the range of these terms based on a close examination of the data collected
from the NRHAs.
As shown in Figure 7.14, the elements in the covariance matrix for the EDPs can be placed
I 9 groups. The terms in groups 1 to 3 are the variance of each EDP and the elements in groups 4
to 6 reflect the correlation among the same type of EDP at different locations. The terms in groups
7 to 9 represent the correlation among different types of EDPs. The distribution of the values for
the terms in the covariance matrix at MCE, DBE, and SLE hazard levels are shown in Figure 7.15-
Figure 7.17. Most of the terms ranges from 0.0 to 0.5 except those in groups 3 and 6, which reveal
the variance and correlation for the residual drifts. The terms in groups 3 and 5 are significantly
greater than those in the other groups (2 to 6). A detailed statistical distribution for the covariance
terms is summarized in Table 7.6. For rapid estimation of EDPs, the median values listed in the
table could be used to construct the covariance matrix.

184
Figure 7.14 A schematic view of the covariance matrix for the EDPs
(a)
(b)
Figure 7.15 The distribution of the covariance terms at MCE hazard level: (a) covariance terms
excluding the residual drift and (b) covariance terms relevant to residual drift
(a)
(b)
Figure 7.16 The distribution of the covariance terms at DBE hazard level: (a) covariance terms
excluding the residual drift and (b) covariance terms relevant to residual drift.
1
2
3
6
7 8
9
Residual story
drift
4
5
Peak story drift Peak floor acceleration Residual story drift
Peak story drift
Peak floor
acceleration

185
(a)
(b)
Figure 7.17 The distribution of the covariance terms at SLE hazard level: (a) covariance terms
excluding the residual drift and (b) covariance terms relevant to residual drift
Table 7.6 The range and median for covariance terms.
Group
Number MCE DBE SLE
Statistics Range Median Range Median Range Median
1 (0.05, 0.47) 0.15 (0.11, 0.6) 0.30 (0.35, 0.60) 0.46
2 (0.05, 0.20) 0.10 (0.05, 0.35) 0.22 (0.25, 0.50) 0.38
3 (1, 4.5) 2.50 (1.8, 6.5) 3.80 (2.3, 6.0) 3.70
4 (0.015, 0.27) 0.11 (0.10, 0.47) 0.27 (0.30, 0.60) 0.44
5 (0.05, 0.15) 0.07 (0.10, 0.30) 0.20 (0.23, 0.47) 0.35
6 (0, 3.50) 1.60 (1.4, 5.0) 3.10 (2.0, 5.0) 3.30
7 (0, 0.14) 0.07 (0.10, 0.31) 0.20 (0.16, 0.50) 0.35
8 (0, 0.75) 0.28 (0, 1.0) 0.55 (0, 1.0) 0.55
9 (0, 0.37) 0.15 (0, 1.0) 0.35 (0, 0.8) 0.38
7.4 Economic Loss Assessment using EDPs from the Surrogate Model and
NRHAs
7.4.1 Overview of Economic Loss Assessment Methodology
With the central tendency estimated from the surrogate model and the assumed covariance
matrix, simulated EDPs could be generated using the jointly lognormal distribution. Based on the
simulated demands, the economic losses for 100 SMRFs at MCE, DBE, and SLE are evaluated
and compared with the loss computed using NRHA-based EDPs. Only the non-parametric
surrogate model is selected to generate the estimation of central tendency for the EDPs since it has

186
the best predictive performance (as indicated in Section 7.3.4).
The expected economic loss conditioned on a single ground motion intensity (𝐸[𝐿|𝐼𝑀]) is
computed using the following relationship [39]:
[ ] [ ] [ ]
[ | ] [ | ] [ | ] [ | ]
E L| IM E L| NC R,IM P NC R | IM
E L NC D P NC D IM E L C P C IM
=
+ + (7.12)
where 𝐸[𝐿|𝑁𝐶 ∩ 𝑅, 𝐼𝑀] is the expected loss for a non-collapse scenario and the building
is repairable. This loss is calculated based on the repair cost for various damage states of each
component in the building, which is specified in the FEMA P-58 database [4]. 𝐸[𝐿|𝑁𝐶 ∩ 𝐷] is the
expected loss when the building does not collapse but is demolished because of excessive residual
drifts. In this case, the loss is 100% of the building value plus an additional 25% of the construction
cost to account for the removal of the debris. 𝐸[𝐿|𝐶] is the expected loss conditioned on collapse,
which is identical to 𝐸[𝐿|𝑁𝐶 ∩ 𝐷, 𝐼𝑀], i.e., 125% of the building construction cost. To facilitate
the calculation, Eq. (7.12) is further simplified as follows:
[ ] [L | NC , ]{1 P(D | NC, IM}{1 P(C | IM)}
[ | NC ]P[D | NC, IM]{1 P(C | IM)} [ | ] [ | ]
E L| IM E R IM
E L D E L C P C IM
= − −
+ − + (7.13)
In Equation (7.13), 𝑃(𝐶|𝐼𝑀) corresponds the probability of collapse at a specific ground
motion intensity level. 𝑃(𝐷|𝑁𝐶, 𝐼𝑀) represents the probability that the structure is demolished
conditioned on non-collapse and the ground motion intensity level, which is calculated using
Equation (7.14) [39].
0
[ | , ] [ | ] [ | , ]P D NC IM P D RDR dP RDR NC IM
= (7.14)
where 𝑃[𝐷|𝑅𝑆𝐷] is the probability that the building is demolished given the residual story
drift. As Ramirez and Miranda [39] suggested, 𝑃[𝐷|𝑅𝑆𝐷] is assumed to follow a lognormal
distribution with a median of 0.015 and a logarithmic standard deviation of 0.3. This loss

187
assessment process is performed using the open-source Python package Pelicun [127].
7.4.2 Description of Building Components
To evaluate the economic loss, structural and non-structural components for the 100 SMRF
buildings are defined. The structural components include bolted shear tab gravity connections,
steel column base plates, and welded steel moment connection. The non-structural components
include the non-structural wall, floor ceiling, water pipes, elevator, and HVAC equipment. The
quantity of each component is determined based on the structural framing and architectural layout
of each SMRF building. One example of damageable components together with their quantities
for a five-story five-bay SMRF building is summarized in Table 7.7. The damage states and
fragility parameters recommended by FEMA P-58 [4] Volume 3 are adopted for these components.
Table 7.7 . Damageable components for a five-story five-bay building
Component
category Building component Unit Governing EDP Quantity
per story
Structural
component
Shear tab gravity connections Each Peak story drift 80
Steel column base plates Each Peak story drift 24
Exterior connections Each Peak story drift 8
Interior connections Each Peak story drift 16
Non-structural
component
Curtain walls 30 ft2 Peak story drift 86.67
Partition walls 100 ft Peak story drift 10
Wall partition finishes 100 ft Peak story drift 0.756
Suspended ceiling 250 ft2 Peak floor acceleration 9
Independent pendant lighting Each Peak floor acceleration 15
Potable water piping 1000 ft Peak floor acceleration 1.26
Potable water pipe bracing 1000 ft Peak floor acceleration 1.26
HVAC Ducting 1000 ft Peak floor acceleration 0.95
Fire sprinkler water piping 1000 ft Peak floor acceleration 2
Fire sprinkler drop ×100 Peak floor acceleration 0.9
Heating water piping 1000 ft Peak floor acceleration 0.10
Heating water piping bracing 1000 ft Peak floor acceleration 0.10
Sanitary waste piping 1000 ft Peak floor acceleration 0.57
Sanitary waste piping bracing 1000 ft Peak floor acceleration 0.57
Traction elevator Each Peak floor acceleration 2a
a Quantity is for entire building.

188
7.4.3 Expected Economic Loss Comparison
The economic losses based on the EDPs generated from the non-parametric surrogate
model and NRHAs are compared in Figure 7.18 where a total of 300 data points (corresponding
to 100 SMRFs at three intensity levels) are included. Figure 7.18(a) indicates that using the EDPs
generated from the surrogate model, on average, slightly underestimates the economic loss at SLE,
but the MCE losses are overestimated. The surrogate model-based loss is relatively unbiased at
the DBE. The distribution of the relative difference shown in Figure 7.18(b) shows that more than
80% of the data points have a difference within -50% to +50%. The measurable differences
between the surrogate model EDP-based and NRHA-based loss is primarily due to the
discrepancies in the covariance matrix since the median values listed in Table 7.6 are used for the
former. To further testify the cause of this discrepancy, EDPs generated from the lognormal
distribution using the median predicted by the surrogate model and the true covariance observed
from NRHAs are used to evaluate the economic loss, which is further compared with the
completely NRHA-based loss, as shown in Figure 7.19. The surrogate model-based economic loss
shows a better agreement with the NRHA-based loss in Figure 7.19 rather than in Figure 7.18,
suggesting that the discrepancy shown in Figure 7.18 is mainly caused by the covariance terms.
This comparison is an indication of the tradeoff between accuracy and the time and effort required
to evaluate the building performance. Adopting the surrogate model and assumed covariance
matrix allows for rapid generation of EDPs but this comes with some loss of accuracy. The
coefficient of the determination (𝑅2) for Figure 7.18(a) is 0.80, indicating that, overall, using the
EDPs generated from the surrogate model yields reasonable estimation of the economic loss.

189
(a)
(b)
Figure 7.18 Comparison of the economic loss based on the EDPs generated from the surrogate
model and NRHAs: (a) NRHA-based versus surrogate model-based economic loss and (b) the
distribution of the relative difference between the NRHA-based and surrogate model-based
losses
(a)
(b)
Figure 7.19 Comparison of the economic loss based on the EDPs generated from the NRHAs and
surrogate models with the covariance observed from NRHAs: (a) NRHA-based versus surrogate
model-based economic loss and (b) the distribution of the relative difference between the
NRHA-based and surrogate model-based losses
7.5 Summary
A set of parametric and non-parametric surrogate models are developed to estimate the
median engineering demand parameters (EDPs) (including peak story drifts, peak floor
accelerations, and residual story drifts) from nonlinear response history analysis (NRHA). These
models are constructed using a data-driven approach based on a comprehensive database that

190
includes 621 steel moment resisting frames (SMRFs) and their seismic responses. The
performance of the proposed surrogate models on the training and validation datasets indicates
that they are well-suited to capturing the relationship between the predictors and the EDPs. The
predictive performance of these models is further evaluated against a testing dataset that includes
the response of 100 SMRFs subjected to three groups of site-specific ground motions. A
comparative assessment of the proposed surrogate models and the simplified analysis method
recommended by FEMA P-58 is conducted to evaluate the predictive performance of the proposed
surrogate models. Additionally, the terms in the covariance matrix are quantitatively investigated
and the suggested values for each term are provided. Finally, the EDPs generated using the
surrogate model and the assumed covariance matrix are used to calculate the economic loss for
100 SMRF buildings and further compared with the loss computed using the NRHA-based EDPs.
The comparison indicates that the surrogate-based EDPs yield reasonable estimates of the
economic loss relative to the EDPs generated from NRHA.

191
8. Effect of Different Design Variables on Seismic Collapse
Performance of Steel Special Moment Frames
8.1 Overview
This chapter presents a study conducted as an application of the AutoSDA platform (as
described in Chapter 3). The collapse performance of steel moment resisting frames (SMRFs)
designed in accordance with modern building codes and standards is evaluated by applying the
FEMA P695 methodology [6]. More specifically, the research study aims to investigate whether
the current design guidelines for steel special moment frames produces an acceptable margin of
collapse resistance and the influence of various design variables on the collapse performance. The
remainder of the chapter starts with the introduction of the collapse performance assessment
framework, followed by an implementation of the methodology for evaluating 197 SMRFs (with
different number of stories, number of bays, bay widths, R factors, and site parameters) located in
Los Angeles metropolitan area. Finally, the general and specific observations on the seismic
performance of these SMRFs. It is worth noting that the seismic design and seismic response
simulation (both of which are the core parts of FEMA P695 methodology) are performed using
the AutoSDA platform, which highlights the importance and capability of the platform in seismic
performance evaluation.
8.2 Collapse Safety Assessment Framework
FEMA P695 provides a systematic guidance on quantifying the building system
performance in terms of the collapse safety. More specifically, it quantitatively specifies an
acceptable safety margin against collapse for a lateral force resisting system designed with a
specific response modification coefficient ( 𝑅 factor). Figure 8.1 illustrates the FEMA P695
collapse performance assessment procedure. The assessment process starts with gathering the

192
relevant design provisions for a certain type of lateral force resisting system, which is substantiated
by component testing information and professional design experience. Then the archetype design
space is developed as a representative of the current building stock and each archetype is designed
to comply the aforementioned design provisions. The archetypes are required to cover the expected
range of building geometric and structural parameters. Afterwards, the structural models are
constructed for the archetypes using reliable modeling techniques. It is worth noting that the
adopted modeling technique should leverage the existing component testing data and incorporates
all modes of collapse. The next step is to characterize the uncertainty, which comes from the
following four sources: record-to-record uncertainty, design requirements uncertainty, test data
uncertainty, and modeling uncertainty. Subsequently, the collapse safety of archetypes is evaluated
by examining whether it meets the following two criteria: (1) the collapse margin for each
individual archetype exceeds the threshold and (2) the collapse margin for a family of archetypes
(denoted as performance groups) exceeds a certain threshold. The acceptable threshold is
determined based on the characterized total uncertainty. If an individual system’s collapse safety
margin or the performance group collapse safety margin does not meet the required performance,
the seismic performance factor should be modified and archetypes are redesigned. This loop
continues until the proposed seismic performance factor can provide adequate collapse safety.

193
Figure 8.1 Overview of FEMA P695 collapse performance assessment procedure
8.3 Implementation of the Framework to Los Angeles Metropolitan Area
This section aims to apply the FEMA P695 methodology introduced in Section 8.2 to
SMRFs located in Los Angeles metropolitan area.
8.3.1 Gathering the Design Provisions for the SMRF
In this study, equivalent lateral force (ELF) procedure is used to design the SMRFs. A
typical design process using the ELF and associated criteria are introduced in Section 3.2.1. More
details regarding the seismic design criteria of SMRFs can be found in the relevant building code
and design standards [30,56,57].
8.3.2 Developing the Archetype Designs
To appropriately capture the seismicity across the Los Angeles metropolitan area, a total
of 12,059 sites are analyzed to gather the associated site parameters. As shown in Figure 8.2, the

194
𝑆𝑀𝑆, 𝑆𝑀1, 𝑆𝐷𝑆, and 𝑆𝐷1 ranges from 1.498 g to 2.995 g, 0.855 g to 1.613 g, 0.998 g to 1.997 g, and
0.570 g to 1.076 g, respectively. Figure 8.3 illustrates the distribution of 𝑉𝑠30 over Los Angeles
region and the site class determined based on the value of 𝑉𝑠30 is summarized in Table 8.1. It could
be seen that a vast majority of the sites in Los Angeles belong to the class 𝐶 and 𝐷. Based on the
gathered data, six fictious sites are generated as a representative of the typical sites in Los Angeles,
as shown in Table 8.2.
(a)
(b)
(c)
(d)
Figure 8.2 The distribution of site parameters in Los Angeles metropolitan area: (a) 𝑆𝑀𝑆, (b) 𝑆𝑀1,
(c) 𝑆𝐷𝑆, and (d) 𝑆𝐷1
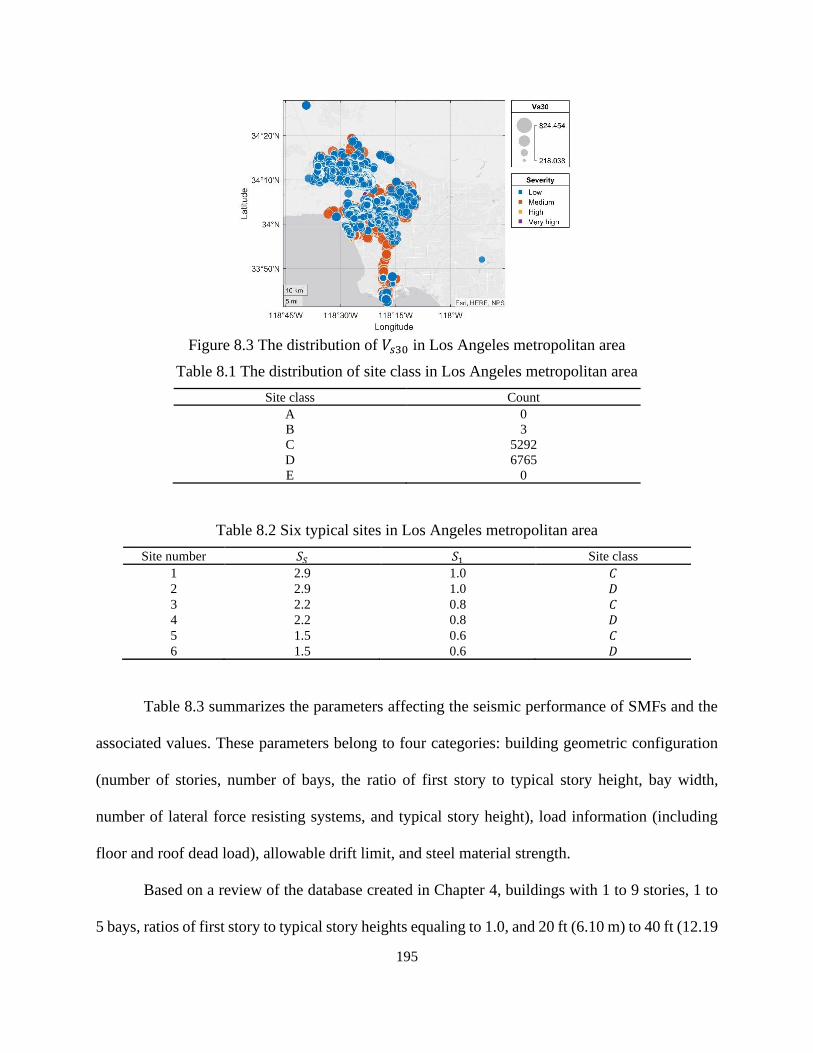
195
Figure 8.3 The distribution of 𝑉𝑠30 in Los Angeles metropolitan area
Table 8.1 The distribution of site class in Los Angeles metropolitan area
Site class Count
A 0
B 3
C 5292
D 6765
E 0
Table 8.2 Six typical sites in Los Angeles metropolitan area
Site number 𝑆𝑆 𝑆1 Site class
1 2.9 1.0 𝐶
2 2.9 1.0 𝐷
3 2.2 0.8 𝐶
4 2.2 0.8 𝐷
5 1.5 0.6 𝐶
6 1.5 0.6 𝐷
Table 8.3 summarizes the parameters affecting the seismic performance of SMFs and the
associated values. These parameters belong to four categories: building geometric configuration
(number of stories, number of bays, the ratio of first story to typical story height, bay width,
number of lateral force resisting systems, and typical story height), load information (including
floor and roof dead load), allowable drift limit, and steel material strength.
Based on a review of the database created in Chapter 4, buildings with 1 to 9 stories, 1 to
5 bays, ratios of first story to typical story heights equaling to 1.0, and 20 ft (6.10 m) to 40 ft (12.19

196
m) bay widths are considered. The number of SMRFs in each principal direction is fixed to two,
which is consistent with typical U.S. practice. The floor dead load is taken as 80 psf (2.39 kN/m2)
and the roof dead load is set as 67.5 psf (2.39 kN/m2). The allowable drift limit is taken as 2%,
which is the default value specified in Table 12.12-1 of ASCE 7-16 [30]. The yield stress for steel
is 50 ksi (345 MPa), which is commonly adopted in United States practice. Based on the
information summarized in Table 8.2 and Table 8.3, considering every combination of the
considered parameter values would result in a total of 594 cases (including 99 archetypical
buildings located at 6 sites).
Table 8.3 Parameters considered in developing the SMF archetypes and their associated ranges
Category Parameters Values considered in archetype design Space
Geometric
configuration
Number of stories (𝑁𝑠) 1, 3, 5, 7, and 9
Number of bays (𝑁𝑏) 1, 3, and 5
First story/typical story height
(ℎ1 ℎ𝑡⁄ ) 1.0
Bay width (𝑊𝑏) 20 ft (6.10 m), 30 ft (9.14 m), and 40 ft (12.19 m)
Number of LFRS’s (𝑁𝐿) Two in principal direction
Typical story height (ℎ𝑡) 13 ft (3.96 m)
Load information
Floor dead load (𝐷𝐿𝑓𝑙𝑜𝑜𝑟) 80 psf (3.83 kN/m2)
Roof dead load (𝐷𝐿𝑟𝑜𝑜𝑓) 67.5 psf (3.23 kN/m2)
Floor live load (L𝐿𝑓𝑙𝑜𝑜𝑟) 50 psf (2.39 kN/m2)
Roof live load (𝐿𝐿𝑟𝑜𝑜𝑓) 20 psf (0.96 kN/m2)
Design conservatism Allowable drift limit (𝜃) 2%
R 8, 9, 10
Steel strength Yield stress (𝐹𝑦) 50 ksi (345 MPa)
Each of the archetype is designed using the AutoSDA platform (as introduced in Chapter
3) and the design story drift profile for one-story, three-story, five-story, seven-story, and nine-
story buildings are presented in Figure 8.4. The median of the design story drifts for all buildings
are approximately uniformly distributed along the building height and within the code limit,
indicating the safety of the designs. To further examine the uniformity of drift distribution, the

197
drift concentration factor (which is defined as the ratio of the maximum story drift to the average
story drift over the building height) for each design is computed and visualized in Figure 8.4. More
than 90% of the DCFs are less than 1.1, which again demonstrates that the design drift is uniformly
distributed along the building height.
(a)
(b)
(c)

198
(d)
(e)
Figure 8.4 Visualizing the design story drifts for the SMRFs designed using R = 8: (a) one-story,
(b) three-story, (c) five-story, (d) seven-story, and (e) nine-story buildings
(a)
(b)
Figure 8.5 Distribution of drift concentration factors for all SMRFs: (a) boxplots for buildings
with different number of stories and (b) histogram of drift concentration factors
8.3.3 Nonlinear Model Development
Two-dimensional structural model for each archetype building realization is constructed in
OpenSees [2]. The modeling details are introduced in Chapter 2.

199
8.3.4 Characterize the Uncertainty
Four sources of uncertainty are considered in the collapse assessment process.
(1) Record-to-record uncertainty (𝛽𝑅𝑇𝑅): it is due to the variability in the response of the
index archetypes to different ground motions. This variability is caused by a combined effect of
variation in frequency content and dynamic characteristics of different records and variation in the
hazard characterization [6]. According to FEMA P695, the uncertainty of the 22-pair far-field
ground motion set is assumed to be 0.40 for the structural systems with significant period
elongation. This assumption holds for SMRFs as they are capable of providing significant inelastic
deformation capacity through flexural yielding at beam ends and limited yielding in panel zones.
(2) Design requirements uncertainty (𝛽𝐷𝑅): it is relevant to the completeness and robustness
of the design requirement and the extent to which they provide safeguards against unanticipated
failure modes. Since the design provision for SMRFs evolves over past decades by including the
lessons learned from major earthquakes (e.g., Northridge earthquake), the design requirements are
categorized as “(A) Superior” in Section 3.4 of FEMA P695 [6] and thus the associated uncertainty
is 0.10. This value is also consistent with the suggestion made by Zareian et al. [46].
(3) Test data uncertainty (𝛽𝑇𝐷): it is related to the completeness and robustness of the test
data used to define the structural system. Based on the guidelines of Section 3.6 of FEMA P695,
the test data quality is rated as “(B) Good” since there is a shortage of data for the deep columns
subjected to high axial forces and cyclic bending moments. Moreover, more experiments are
required to quantify the influence of concrete slab on the beam strength and stiffness. Based on
the rating, the test data uncertainty is 0.20.
(4) Modeling uncertainty 𝛽𝑀𝐷𝐿: it is associated to how well the index archetype models
represent the full range of structural response characteristics and how well the nonlinear analysis

200
can capture the collapse behavior through direct simulation or non-simulated component checks.
Based on existing observations from earthquakes, the primary failure mode for SMRFs is the
flexural hinging leading to sideway collapse, which is well captured by the modeling approach
(i.e., concentrated plasticity model) adopted in the current study. Meanwhile, the archetype design
space in this study covers a wide range of configurations. Based on these considerations, the
modeling quality is categorized “(A) Superior” and the associated uncertainty is 0.10.
The total system uncertainty (𝛽𝑇𝑂𝑇) is calculated using Equation (8.1) and the result is
0.469. According to Section 7.3 of FEMA P695, 𝛽𝑇𝑂𝑇 should be rounded to the nearest 0.025 and
thus the final total system uncertainty should be 0.475. This value is later used to determine the
acceptable threshold of adjusted collapse margin ratio (ACMR).
2 2 2 2
TOT RTR DR TD MDL = + + + (8.1)
8.3.5 Quantify the Margin of Safety Against Collapse
The dynamic performance of the archetype is assessed using truncated incremental
dynamic analysis (IDA) [61]. The set of 44 (22 pairs) far-field ground motion records specified in
FEMA P695 [4] are used. The magnitude for these records varies from M6.5 to M7.6 with an
average of M7.0. Thirty-two (16 pairs) of the ground motions were recorded at sites classified as
site class 𝐷 and the remaining records are from site class 𝐶 locations. The peak ground
acceleration for the record set varies from 0.21g to 0.82g with an average of 0.43g. More detailed
information about the ground motion records can be found in Appendix A of FEMA P695. The
scaling for the truncated IDAs is performed such that the median spectral acceleration of the
record-set matches the target intensity levels, which ranges from 25% to 250% of the spectral
acceleration corresponding to the maximum considered earthquake (𝑆𝑎𝑀𝐶𝐸)
The truncated results are used to generate a collapse fragility, where a lognormal

201
distribution function is used to fit the simulation data via the maximum likelihood method. The
collapse margin ratio (CMR), which is defined as the ratio of the median collapse spectral
acceleration to 𝑆𝑎𝑀𝐶𝐸, is computed based on the collapse fragility. Then CMR is further adjusted
by multiplying with a spectral shape factor, which then becomes adjusted collapse margin ratio
(ACMR). The histogram of ACMRs for SMRFs designed with different R factors is shown in
Figure 8.6. While more than 80% of ACMRs are greater than 2.0, there is still 10% of ACMRs
that are relatively small (less than 1.5). A more rigorous evaluation on ACMRs is performed in the
following section.
(a)
(b)
(c)
Figure 8.6 The histogram of ACMRs for (a) R = 8, (b) R = 9, and (c) R = 10

202
8.3.6 Performance Evaluation
The building performance is evaluated by comparing the ACMR of the structure with an
acceptable ACMR, which is determined based on the value of total system uncertainty (as described
in Section 8.3.4). According to Table 7-3 of FEMA P695 [6], the acceptable values of ACMR with
acceptable collapse probability of 10% (𝐴𝐶𝑀𝑅10%) and 20% (𝐴𝐶𝑀𝑅20%) are 1.84 and 1.49,
respectively. Acceptable performance is achieved if the following criteria is met:
(1) The average value of ACMRs for each performance group exceeds 𝐴𝐶𝑀𝑅10%.
(2) The individual value of ACMR for each index archetype within a performance group
exceeds 𝐴𝐶𝑀𝑅20%.
As shown in Figure 8.6, there is about 10% of design cases that is less than 𝐴𝐶𝑀𝑅20%
across R factors. This suggests that a small portion of the designs complied with the current
building code and design standards still fail to pass the acceptability check specified by FEMA
P695. To further examine the effect of different design variables on ACMRs, the buildings are
lumped into different groups based on their number of stories, bay widths, number of bays, and
site conditions and the distributions of ACMRs of different groups are shown in Figure 8.7 to
Figure 8.10. Figure 8.7 shows a trend that the ACMR decreases as the number of stories increase,
indicating that the collapse resistance decreases with building height. This observation is consistent
with the findings reported by Zareian et al. [46]. Moreover, while all building groups have an
average value exceeding 𝐴𝐶𝑀𝑅10%, the buildings with three to nine stories fail to meet the second
performance criterion. Figure 8.8 indicates that increasing the bay width does not affect the median
of the collapse resistance but increase the dispersion a bit. The observation in Figure 8.9 indicates
that when R = 8, the collapse resistance decreases with the number of bays. However, the ACMR
does not vary with the number of bays when R = 9 and 10..Figure 8.10 reveals that the seismicity

203
does not affect the distribution of ACMR in all cases. The phenomenon in Figure 8.11 indicates
that as R factor increases, the median of ACMR drops a bit from 2.5 to 2.25.
To summarize, while most of the archetype buildings’ ACMRs are higher than the
acceptable threshold, there is still 10% of the designs failing to meet the threshold of 𝐴𝐶𝑀𝑅10%.
This finding should raise the awareness and cautiousness of engineers when designing SMRFs
located at high seismicity regions (e.g., Los Angeles metropolitan area).
(a)
(b)
(c)
Figure 8.7 The distribution of ACMRs for buildings with different number of stories: (a) R = 8,
(b) R = 9, and (c) R = 10

204
(a)
(b)
(c)
Figure 8.8 The distribution of ACMRs for buildings with different bay width: (a) R = 8, (b) R =
9, and (c) R = 10

205
(a)
(b)
(c)
Figure 8.9 The distribution of ACMRs for buildings with different number of bays: (a) R = 8, (b)
R = 9, and (c) R = 10

206
(a)
(b)
(c)
Low seismic intensity: Ss = 1.5 g, S1 = 0.6 g
Medium seismic intensity: Ss = 2.2 g, S1 = 0.8 g
High seismic intensity: Ss = 2.9 g, S1 = 1.0 g
Figure 8.10 The distribution of ACMRs for buildings located in different seismicity region: (a) R
= 8, (b) R = 9, and (c) R = 10

207
Figure 8.11 The distribution of ACMRs for buildings designed with different R factors
8.4 Summary
This chapter evaluates the collapse performance of steel special moment frames by
applying FEMA P695 methodology. Archetype designs comprise 594 SMFs that are designed with
different number of stories, number of bays, bay widths, R factors, and site parameters. Nonlinear
models are constructed and analyzed under 44 ground motions to predict the collapse resistance of
each archetype design. The adjusted collapse margin ratios (ACMRs) of different building groups
are compared and the following conclusions are drawn: (1) The collapse resistance decreases with
building height. (2) Increasing the bay width does not affect the median of ACMRs but increases
the dispersion a bit. (3) When R = 8, the collapse resistance decreases with the number of bays.
However, the ACMR does not vary with the number of bays when R = 9 and 10. (4) The seismicity
does not affect the ACMR. (5) When R increases from 8 to 10, the ACMR only drop a bit from
2.5 to 2.25. (6) while most of the archetype buildings’ ACMRs are higher than the acceptable
threshold, there is still 10% of the designs failing to meet the threshold of 𝐴𝐶𝑀𝑅10%. This finding
should raise the awareness and cautiousness of engineers when designing SMRFs located at high
seismicity regions (e.g., Los Angeles metropolitan area).

208
9. Summary, Conclusions and Future Research Needs
9.1 Overview
This study aims to develop and apply the performance-based analytics-driven seismic
design methodology to steel moment resisting frame buildings. The body of work includes seismic
design automation, archetype design database construction, extensive nonlinear structural
analyses, and rapid characterization for the probabilistic distribution of seismic responses and
impacts. The research findings can be viewed as a complement to the current performance-based
earthquake engineering framework to facilitate its application in practice. The specific issues that
addressed include
1. Examining the advantages and limitations of different modeling techniques for steel
moment resisting frames and determining the optimal one that strikes a balance between the
reliability of analysis results and computational expense (Chapter 2).
2. Creating a framework and computational platform for automating seismic design,
structural response simulation, seismic impact assessment, and performance criteria evaluation for
steel moment frame buildings (Chapter 3).
3. Creating a comprehensive database that could potentially be used to evaluate the
performance of existing methods and develop data-driven and hybrid (combination of mechanics-
based + data-driven) models for estimating seismic structural responses (Chapter 4).
4. Investigating the difference in seismic performance between the self-centering moment
resisting frame using post-tensioned connections and the conventional moment resisting frames
using reduced-beam section connections (Chapter 5).
5. Formulating a framework for developing hybrid and/or data-driven models for
estimating building structural response demands under extreme loading and applying it to predict

209
the seismic drift demands in steel moment resisting frames (Chapter 6).
6. Proposing a set of parametric and non-parametric surrogate models for estimating the
median SMRF engineering demand parameters (including peak story drifts, peak floor
accelerations, and residual story drifts) (Chapter 7).
7. Performing a systematic study to quantify the influence of various design variables on
the collapse resistance of steel moment resisting frames located in Los Angeles metropolitan area
(Chapter 8).
9.2 Findings and Conclusions
The key findings from Chapters 2 to 8 are summarized in this section.
9.2.1 Chapter 2 Nonlinear Modeling and Analysis Methodology of Steel Moment Resisting
Frames
This chapter provides an in-depth literature review that summarizes the recent advances in
structural modeling of steel moment resisting frames. Different models, including concentrated
plasticity, finite length plastic hinge, distributed plasticity, and continuum finite-element models,
are critically examined to reveal their advantages and limitations. Based on the examination, the
concentrated plasticity model is found to strike a balance between the reliability of the analysis
results and computational expense. Consequently, it is consistently adopted throughout the entire
study.
9.2.2 Chapter 3 Python-Based Computational Platform to Automate Seismic Design,
Nonlinear Structural Model Construction and Analysis of Steel Moment Resisting Frames
This chapter presents a Python-based platform that automates the seismic design, nonlinear
structural model generation, and response simulation of steel special moment resisting frames
(SMRFs). The first module of the automatic seismic analysis and design (AutoSDA) platform

210
takes building configuration, loads, and site parameters as input and outputs SMRF designs that
comply with the latest building code provisions while accounting for ease of construction. A
second module constructs two-dimensional nonlinear structural models in OpenSees based on the
generated designs and performs nonlinear static and dynamic analyses towards a comprehensive
evaluation of seismic performance. The efficiency, reliability, and accuracy of the AutoSDA
platform are demonstrated using several illustrative examples. The adopted object orientated
programming structure makes the platform easily adaptable. Potential future enhancements
include the use of alternative strategies to account for beam-column material nonlinearity, 3D
modeling and economic loss assessment. The broad implication of the AutoSDA platform is a
drastic reduction in the time and effort involved in performance-based seismic design. Moreover,
it can be used to develop a database of archetype steel moment frame buildings (as introduced in
Chapter 4) towards the development of analytics-driven design methodologies. It is worth noting
that the development details (e.g., platform structure and algorithm) documented in this chapter
can be used to create similar platforms for other types of structural systems. A key limitation of
the current version of the AutoSDA platform is that it only allows the design of SMRFs using the
ELF method. This limitation can be addressed by adding a feature that generates designs using the
results from response spectrum and/or response history analyses. Some other limitations include
the lack of column splice and foundation design, and the absence of a graphical user interface, all
of which could be easily incorporated in future versions. This platform has been implemented as
a part of EE-UQ framework developed as part of the National Science Foundation Natural Hazards
Engineering Research Infrastructure (NHERI) SimCenter.

211
9.2.3 Chapter 4 A Database of Seismic Design, Nonlinear Models, and Seismic Responses
for SMRF Buildings
The database introduced in this chapter was created using the archetype concept, which
groups buildings with similar geometric configurations and/or structural properties into
representative sets, resulting in generalized performance predictions for a full class of buildings
[74]. The values of the parameters considered in the archetype design space are determined based
on the standard of structural engineering practice. As a result, the database is representative of
actual SMRFs located in high seismicity zones. In addition, practitioners from Englekirk Structural
Engineers (https://www.englekirk.com) have been involved in the development of the database,
which ensures that the designs are realistic. All datasets are stored as .csv files, which could be
retrieved based on a specific building ID. This allows the user/program to easily access the data.
The database [54] has been made publicly available through the DesignSafe cyberinfrastructure.
The database could potentially be utilized for a wide range of purposes. For example, it
could be used to identify the influence of various design parameters on the seismic performance
of SMRFs (as presented in Chapter 8), assess the accuracy and reliability of existing seismic
demand prediction approaches (as introduced in Chapter 6), develop data-driven models for
predicting seismic demands (as described in Chapter 7), and formulate methods to explore optimal
designs based on a predefined set of constraints.
9.2.4 Chapter 5 Comparative Study for Steel Moment Resisting Frames Using Post-
Tensioned and Reduced-Beam Section Connections
In this chapter, a comparative assessment of the seismic performance and economic losses
for a self-centering moment resisting frame (SC-MRF) and reduced beam section (RBS) welded
moment resisting frame (WMRF) is presented, where the SC-MRF and WMRF have identical
beam and column sizes. First, a reliable phenomenological model for the PT beam-column

212
connections with top-and-seat angles is developed and verified against past experimental results.
A prototype building, which has SC-MRFs as its lateral force resisting system, is selected. Using
the developed phenomenological model, the entire frame is modeled in OpenSees. Nonlinear static
and response history analyses are subsequently performed to study the response of the frame
models. The pushover analysis results indicate that the strength of the SC-MRF is 40% lower than
that of the WMRF. The dynamic analysis results show that the WMRF has higher collapse
resistance, whereas the SC-MRF undergoes smaller residual drifts. However, it is worth noting
that the collapse resistance of both frames is within the permissible values of acceptable collapse
margin ratio of the FEMA P695 guidelines. Finally, the economic seismic losses for the SC-MRF
and WMRF buildings are assessed using the FEMA P-58 methodology, which accounts for the
influence of residual drift and the repair costs of structural and nonstructural components. The
results reveal that the expected annual loss for the SC-MRF building is 21% higher than that for
the WMRF building. More specifically, the SC-MRF building has a lower expected loss associated
with demolition, but higher losses associated with collapse.
9.2.5 Chapter 6 Seismic Drift Demand Estimation for SMRF Buildings: from Mechanics-
Based to Data-Driven Models
A spectrum of simplified methods for estimating seismic drift demands is presented and
evaluated. On one end of the spectrum are fully mechanics-based approaches that are derived
solely based on engineering principles. On the other end are purely data-driven models that are
established by applying statistical and machine learning methods to a parametric dataset of drift
demands generated from nonlinear response history analyses (NRHAs). Between these two
extremes, there are hybrid methods that integrate both fundamental mechanics and
statistical/machine learning techniques. Four existing methods that fall within this spectrum of

213
approaches are reviewed, and their benefits and drawbacks are discussed. They are based on shear
and flexural beam theory, an elastoplastic single-degree-of-freedom system with known yield
strength (PSKY), statistically adjusted spectral displacement, and the statistically adjusted
response of a linear elastic multi-degree-of-freedom system with known yield strength (EMKY).
A framework for developing hybrid and/or data-driven models to estimate structural
responses under extreme events is established. A systematic step-to-step procedure is presented
that is agnostic to the type of demand parameter (e.g., story drifts and floor accelerations) and
lateral-force resisting system being considered. Meanwhile, the advantages and limitations of
different metrics used for evaluating model performance are discussed and a new metric 𝐷𝑋%
(defined as the fraction of the dataset whose relative difference does not exceed 𝑋%) is proposed.
The framework is then used to develop purely data-driven and hybrid models for estimating
seismic drift demands in steel special moment resisting frames (SMRFs). These two models are
described as (i) machine learning based and purely data-driven (MLDD) and (ii) machine learning
based adjusted response of an EMKY (ML-EMKY). Both are formulated based on a dataset of
seismic structural responses from 621 modern code-based SMRF designs subjected to 240 ground
motions. During the model development process, the sensitivity of the model performance to 35
potential predictor variables is investigated. For the hybrid model, the floor height ratio (defined
as the ratio of the height of floor 𝑖 to the total building height) and intensity measures (𝑆𝑎(𝑇) and
𝑆𝑑(𝑇1)) are the two most influential types of predictors, whereas, in the purely data-driven model,
the intensity measure 𝑆𝑎(𝑇1) alone dominates the response estimation.
Finally, a comparative assessment of the predictive performance among the existing and
newly developed models is performed. More specifically, previously developed PSKY and
statistically adjusted EMKY models and newly developed MLDD and ML-EMKY models, are

214
evaluated on a testing dataset including the responses of 100 SMRFs subjected to three sets of site-
specific ground motions selected based on the service-level earthquake (SLE), design-based
earthquake (DBE), and maximum considered earthquake (MCE) levels. The evaluation results
suggest that the hybrid model generally has a higher accuracy than the purely data-driven or
mechanics-based models. A comparison of the level of the effort required to apply the different
models reveals that the mechanics-based model (PSKY) requires the greatest effort whereas the
reduced-order MLDD model needs the least effort. The latter could be applied during the
preliminary design stage.
9.2.6 Chapter 7 Surrogate Models for Probabilistic Distribution of Engineering Demand
Parameters of SMRF Buildings under Earthquakes
A set of parametric and non-parametric surrogate models are developed to estimate the
median engineering demand parameters (EDPs) (including peak story drifts, peak floor
accelerations, and residual story drifts) from nonlinear response history analysis (NRHA). These
models are constructed using a data-driven approach based on a comprehensive database that
includes 621 steel moment resisting frames (SMRFs) and their seismic responses. The
performance of the proposed surrogate models on the training and validation datasets indicates
that they are well-suited to capturing the relationship between the predictors and the EDPs. The
predictive performance of these models is further evaluated against a testing dataset that includes
the response of 100 SMRFs subjected to three groups of site-specific ground motions. A
comparative assessment of the proposed surrogate models and the simplified analysis method
recommended by FEMA P-58 is conducted to evaluate the predictive performance of the proposed
surrogate models. Additionally, the terms in the covariance matrix are quantitatively investigated
and the suggested values for each term are provided. Finally, the EDPs generated using the

215
surrogate model and the assumed covariance matrix are used to calculate the economic loss for
100 SMRF buildings and further compared with the loss computed using the NRHA-based EDPs.
The comparison indicates that the surrogate-based EDPs yield reasonable estimates of the
economic loss relative to the EDPs generated from NRHA.
9.2.7 Chapter 8 Effect of Different Design Variables on Seismic Collapse Performance of
Steel Special Moment Frames
This chapter evaluates the collapse performance of steel special moment frames by
applying FEMA P695 methodology. Archetype designs for 135 SMRFs with different number of
stories, number of bays, bay widths, R factors, and site parameters, are developed. Nonlinear
models are constructed and analyzed using the 44 FEMA P695 ground motions to predict the
collapse resistance of each archetype design. The adjusted collapse margin ratios (ACMRs) of
different building groups are compared and the following conclusions are drawn: (1) The collapse
resistance decreases with building height. (2) Increasing the bay width does not affect the median
of ACMRs but increases the dispersion a bit. (3) When R = 8, the collapse resistance decreases
with the number of bays. However, the ACMR does not vary with the number of bays when R =
9 and 10. (4) The seismicity does not affect the ACMR. (5) When R increases from 8 to 10, the
ACMR only drop a bit from 2.5 to 2.25. (6) while most of the archetype buildings’ ACMRs are
higher than the acceptable threshold, there is still 10% of the designs failing to meet the threshold
of 𝐴𝐶𝑀𝑅10% . This finding should raise the awareness and cautiousness of engineers when
designing SMRFs located at high seismicity regions (e.g., Los Angeles metropolitan area).
9.3 Limitations and Future Work
The limitations and possible future extensions of the current body of work are as follows:
1. As mentioned in Chapter 2, the concentrated plasticity model was adopted throughout

216
the current study to simulate the inelastic behavior of beam and column components in steel
moment resisting frames and Rayleigh damping model is used in the dynamic analysis.
Consequently, all the findings reported here all are based on the aforementioned modeling strategy.
To improve the robustness of reported findings, various modeling techniques (such as elements
with fiber sections or finite length plastic hinge models) could be utilized and the corresponding
analysis results could be compared with the results presented.
2. As introduced in Chapter 3, the automated seismic design and analysis (AutoSDA)
platform does not incorporate design based on the response spectrum analysis. Additionally, its
current version does not address torsional irregularity or other 3-dimensional effects. Potential
enhancements include the incorporation alternative design methods and 3D modeling. In this case,
the database (Chapter 4) created using the AutoSDA platform could be used to investigate the
influence of different design methods and 3D-related issues on the collapse performance of steel
moment resisting frames.
3. The archetype designs introduced in Chapter 4 are generated using a “brute-force”
approach that considers every possible combination of the considered parameter values. This
approach yields an excessively large number of archetype designs, which increase the
computational expense required to analyze each design. A future enhancement includes using the
smart sampling method to generate the design space and thus reduces the required number of
sampling points.
4. One promising extension of current work is to use data-driven approaches to construct a
surrogate model that links the building variables to the earthquake-induced economic loss. Then a
cost-benefit analysis could be performed to determine the optimized design space for a specific
design condition. Generating the design within this optimized design space would achieve the most

217
desirable overall performance outcome considering multiple objectives.
5. This entire study focused on a single type of lateral force resisting systems. As a possible
extension, a generalized seismic response prediction model could be developed for various
building structural systems (including but not limited to reinforced concrete frames, shear walls,
and dual systems). Such a generalized model enables the decision maker to conduct rapid
assessment on city-scale response during and after earthquakes and thus better direct the resources
required for building earthquake-resilient communities.

218
10. Reference
[1] FEMA. Guidelines for performance-based seismic design of buildings. Redwood City, CA:
Applied Technology Council; 2018.
[2] McKenna F, Fenves GL, Scott MH, others. Open system for earthquake engineering
simulation. University of California, Berkeley, CA 2000.
[3] Haselton Baker Risk Group. Seismic Performance Prediction Program. 2017.
[4] FEMA. Seismic performance assessment of buildings. Redwood City, CA: Applied
Technology Council; 2012.
[5] Burton H. A framework for performance-based analytics driven design. 11th National
Conference in Earthquake Engineering, Los Angeles, California, USA: 2018.
[6] FEMA. Quantification of building seismic performance factors. Redwood City, CA: Applied
Technology Council; 2009.
[7] Elkady A, Lignos DG. Analytical investigation of the cyclic behavior and plastic hinge
formation in deep wide-flange steel beam-columns. Bulletin of Earthquake Engineering
2015;13:1097–118.
[8] Khandelwal K, El-Tawil S. Collapse behavior of steel special moment resisting frame
connections. Journal of Structural Engineering 2007;133:646–55.
[9] Deierlein G, Reinhorn A, Willford M. NEHRP Seismic design technical brief No. 4-nonlinear
structural analysis for seismic design: a guide for practicing engineers. 2010.
[10] Bazant ZP, Bhat PD. Prediction of hysteresis of reinforced concrete members. ASCE J Struct
Div 1977;103:153–67.
[11] Neuenhofer A, Filippou FC. Evaluation of nonlinear frame finite-element models. Journal of
Structural Engineering 1997;123:958–66.
[12] Engelen RA, Geers MG, Baaijens FP. Nonlocal implicit gradient-enhanced elasto-plasticity

219
for the modelling of softening behaviour. International Journal of Plasticity 2003;19:403–33.
[13] Jirásek M, Rolshoven S. Comparison of integral-type nonlocal plasticity models for strain-
softening materials. International Journal of Engineering Science 2003;41:1553–602.
[14] Bažant ZP, Jirásek M. Nonlocal integral formulations of plasticity and damage: survey of
progress. Journal of Engineering Mechanics 2002;128:1119–49.
[15] Ribeiro FL, Barbosa AR, Scott MH, Neves LC. Deterioration modeling of steel moment
resisting frames using finite-length plastic hinge force-based beam-column elements. Journal
of Structural Engineering 2014;141:04014112.
[16] Kolwankar S, Kanvinde A, Kenawy M, Lignos D, Kunnath S. Simulating local buckling-
induced softening in steel members using an equivalent nonlocal material model in
displacement-based fiber elements. Journal of Structural Engineering 2018;144:04018192.
[17] Clough RW. Effect of stiffness degradation on earthquake ductility requirements.
Proceedings of Japan earthquake engineering symposium, 1966.
[18] Giberson MF. The response of nonlinear multi-story structures subjected to earthquake
excitation 1967.
[19] Takeda T, Sozen MA, Nielsen NN. Reinforced concrete response to simulated earthquakes.
Journal of the Structural Division 1970;96:2557–73.
[20] Ramberg W, Osgood WR. Description of stress-strain curves by three parameters 1943.
[21] Ibarra LF, Medina RA, Krawinkler H. Hysteretic models that incorporate strength and
stiffness deterioration. Earthquake Engineering & Structural Dynamics 2005;34:1489–511.
[22] Ibarra LF, Krawinkler H. Global collapse of frame structures under seismic excitations.
Pacific Earthquake Engineering Research Center Berkeley, CA; 2005.
[23] Lignos D. Sidesway collapse of deteriorating structural systems under seismic excitations.
Doctoral dissertation. Stanford University, 2008.

220
[24] Lignos DG, Krawinkler H. Deterioration modeling of steel components in support of collapse
prediction of steel moment frames under earthquake loading. Journal of Structural
Engineering 2010;137:1291–302.
[25] Lignos DG, Hartloper AR, Elkady A, Deierlein GG, Hamburger R. Proposed updates to the
ASCE 41 nonlinear modeling parameters for wide-flange steel columns in support of
performance-based seismic engineering. Journal of Structural Engineering
2019;145:04019083.
[26] Hwang S-H, Lignos DG. Earthquake-induced loss assessment of steel frame buildings with
special moment frames designed in highly seismic regions. Earthquake Engineering &
Structural Dynamics 2017;46:2141–62.
[27] Krawinkler H. Shear in beam-column joints in seismic design of steel frames. Engineering
Journal 1978;15.
[28] Gupta A, Krawinkler H. Seismic demands for the performance evaluation of steel moment
resisting frame structures. PhD Thesis. Stanford University, 1998.
[29] Zareian F, Medina RA. A practical method for proper modeling of structural damping in
inelastic plane structural systems. Computers & Structures 2010;88:45–53.
[30] ASCE 7-16. Minimum design loads and associated criteria for buildings and other structures.
Reston, VA: 2016.
[31] Hamburger RO, Malley JO. Seismic design of steel special moment frames. NIST GCR
2009:09–917.
[32] Lignos DG, Krawinkler H. A steel database for component deterioration of tubular hollow
square steel columns under varying axial load for collapse assessment of steel structures
under earthquakes. Proc. 7th Int. Conf. on Urban Earthquake Engineering (7CUEE), Center
for Urban Earthquake Engineering, Tokyo Institute of Technology Tokyo; 2010.
[33] Flores FX, Charney FA, Lopez-Garcia D. Influence of the gravity framing system on the
collapse performance of special steel moment frames. Journal of Constructional Steel

221
Research 2014;101:351–62.
[34] Elkady A, Lignos DG. Effect of gravity framing on the overstrength and collapse capacity of
steel frame buildings with perimeter special moment frames. Earthquake Engineering &
Structural Dynamics 2015;44:1289–307.
[35] Dimopoulos AI, Karavasilis TL, Vasdravellis G, Uy B. Seismic design, modelling and
assessment of self-centering steel frames using post-tensioned connections with web
hourglass shape pins. Bulletin of Earthquake Engineering 2013;11:1797–816.
https://doi.org/10.1007/s10518-013-9437-4.
[36] Dimopoulos AI, Tzimas AS, Karavasilis TL, Vamvatsikos D. Probabilistic economic seismic
loss estimation in steel buildings using post-tensioned moment-resisting frames and viscous
dampers. Earthquake Engineering & Structural Dynamics 2016;45:1725–41.
https://doi.org/10.1002/eqe.2722.
[37] Fang C, Yam MCH, Lam ACC, Xie L. Cyclic performance of extended end-plate connections
equipped with shape memory alloy bolts. Journal of Constructional Steel Research
2014;94:122–36. https://doi.org/10.1016/j.jcsr.2013.11.008.
[38] Moradi S, Alam MS. Feasibility study of utilizing superelastic shape memory alloy plates in
steel beam–column connections for improved seismic performance. Journal of Intelligent
Material Systems and Structures 2015;26:463–75.
[39] Ramirez CM, Miranda E. Significance of residual drifts in building earthquake loss
estimation. Earthquake Engineering & Structural Dynamics 2012;41:1477–93.
https://doi.org/10.1002/eqe.2217.
[40] Tzimas A, Kamaris G, Karavasilis T, Galasso C. Collapse risk and residual drift performance
of steel buildings using post-tensioned MRFs and viscous dampers in near-fault regions.
Bulletin of Earthquake Engineering 2016;14:1643–62.
[41] Haselton CB. Assessing seismic collapse safety of modern reinforced concrete moment frame
buildings. PhD Thesis. Stanford University, 2006.

222
[42] Liel AB, Deierlein GG. Assessing the collapse risk of California’s existing reinforced
concrete frame structures: metrics for seismic safety decisions. vol. 69. 2008.
[43] Haselton CB, Liel AB, Deierlein GG, Dean BS, Chou JH. Seismic collapse safety of
reinforced concrete buildings. I: Assessment of ductile moment frames. Journal of Structural
Engineering 2010;137:481–91.
[44] Liel AB, Haselton CB, Deierlein GG. Seismic collapse safety of reinforced concrete
buildings. II: Comparative assessment of nonductile and ductile moment frames. Journal of
Structural Engineering 2010;137:492–502.
[45] Deierlein GG, Liel AB, Haselton CB, Kircher CA. ATC 63 methodology for evaluating
seismic collapse safety of archetype buildings. Structures Congress 2008: Crossing Borders,
2008, p. 1–10.
[46] Zareian F, Lignos D, Krawinkler H. Evaluation of seismic collapse performance of steel
special moment resisting frames using FEMA P695 (ATC-63) methodology. Structures
Congress 2010, 2010, p. 1275–86.
[47] Morfidis K, Kostinakis K. Seismic parameters’ combinations for the optimum prediction of
the damage state of R/C buildings using neural networks. Advances in Engineering Software
2017;106:1–16.
[48] FEMA P-2012. Assessing seismic performance of buildings with configuration irregularities.
Redwood City, CA: Applied Technology Council; 2018.
[49] Khoshnoudian F, Mehrparvar B, others. Evaluation of IBC equivalent lateral response
procedure for seismic isolated structures. Australian Structural Engineering Conference 2005,
Engineers Australia; 2005, p. 992.
[50] Whittaker AS, Constantinou MC, Ramirez OM, Johnson MW, Chrysostomou CZ. Equivalent
lateral force and modal analysis procedures of the 2000 NEHRP Provisions for buildings with
damping systems. Earthquake Spectra 2003;19:959–80.
[51] Xu L, Grierson DE. Computer-automated design of semirigid steel frameworks. Journal of
223
Structural Engineering 1993;119:1740–60.
[52] Moharrami H, Grierson DE. Computer-automated design of reinforced concrete frameworks.
Journal of Structural Engineering 1993;119:2036–58.
[53] Kavlie D, Moe J. Automated design of frame structures. Journal of the Structural Division
1971;97:33–62.
[54] Guan X, Burton H, Shokrabadi M. A Database of Seismic Designs, Nonlinear Models, and
Seismic Responses for Steel Moment Resisting Frame Buildings. DesignSafe-CI
Https://DoiOrg/1017603/Ds2-8yc7-1285 2020.
[55] Guan X, Burton H, Shokrabadi M. A database of seismic designs, nonlinear models, and
seismic responses for steel moment-resisting frame buildings. Earthquake Spectra
2020:8755293020971209.
[56] American Institute of Steel Construction (AISC). Seismic provisions for structural steel
buildings. ANSI/AISC 341-16. American Institute of Steel Construction: Chicago, IL 2016.
[57] American Institute of Steel Construction (AISC). Specification for structural steel buildings.
ANSI/AISC 360-16. American Institute of Steel Construction: Chicago, IL 2016.
[58] American Institute of Steel Construction (AISC). Prequalified connections for special and
intermediate steel moment frames for seismic applications. ANSI/AISC 358-16. American
Institute of Steel Construction: Chicago, IL 2016.
[59] Baker JW. Efficient analytical fragility function fitting using dynamic structural analysis.
Earthquake Spectra 2015;31:579–99.
[60] International Code Council. International building code 2003. International Code Council;
2002.
[61] Vamvatsikos D, Cornell CA. Incremental dynamic analysis. Earthquake Engineering &
Structural Dynamics 2002;31:491–514.

224
[62] Ancheta TD, Darragh RB, Stewart JP, Seyhan E, Silva WJ, Chiou BS, et al. Peer NGA-West2
database 2013.
[63] Gupta A, Krawinkler H. Estimation of seismic drift demands for frame structures. Earthquake
Engineering & Structural Dynamics 2000;29:1287–305.
[64] Lin Y-Y, Miranda E. Estimation of maximum roof displacement demands in regular
multistory buildings. Journal of Engineering Mechanics 2009;136:1–11.
[65] Miranda E. Approximate seismic lateral deformation demands in multistory buildings.
Journal of Structural Engineering 1999;125:417–25.
[66] Miranda E, Reyes CJ. Approximate lateral drift demands in multistory buildings with
nonuniform stiffness. Journal of Structural Engineering 2002;128:840–9.
[67] Zhang R, Chen Z, Chen S, Zheng J, Büyüköztürk O, Sun H. Deep long short-term memory
networks for nonlinear structural seismic response prediction. Computers & Structures
2019;220:55–68.
[68] Elkady A, Lignos DG. Two-dimensional OpenSees numerical models for archetype steel
buildings with special moment frames 2019.
[69] Esteghamati MZ, Lee J, Musetich M, Flint MM. INSSEPT: An open-source relational
database of seismic performance estimation to aid with early design of buildings. Earthquake
Spectra 2020.
[70] Rathje EM, Dawson C, Padgett JE, Pinelli J-P, Stanzione D, Adair A, et al. DesignSafe: new
cyberinfrastructure for natural hazards engineering. Natural Hazards Review
2017;18:06017001.
[71] Miranda E. Inelastic displacement ratios for structures on firm sites. Journal of Structural
Engineering 2000;126:1150–9.
[72] Jayaram N, Lin T, Baker JW. A computationally efficient ground-motion selection algorithm
for matching a target response spectrum mean and variance. Earthquake Spectra

225
2011;27:797–815.
[73] Campbell KW, Bozorgnia Y. NGA-West2 Campbell-Bozorgnia ground motion model for
the horizontal components of PGA, PGV, and 5%-damped elastic pseudo-acceleration
response spectra for periods ranging from 0.01 to 10 sec. Pacific Earthquake Engineering
Research Center; 2013.
[74] Haselton CB, Deierlein GG. Assessing seismic collapse safety of modern reinforced concrete
moment-frame buildings. vol. 67. 2007.
[75] Ozkula G, Harris J, Uang C-M, Maison BF. Observations from cyclic tests on deep, wide-
flange beam-columns. Engineering Journal 2019;56:3–5.
[76] Christchurch rebuild to cost $10b more. Newshub 2017.
[77] Asgarian B, Moradi S. Seismic response of steel braced frames with shape memory alloy
braces. Journal of Constructional Steel Research 2011;67:65–74.
https://doi.org/10.1016/j.jcsr.2010.06.006.
[78] Miller DJ, Fahnestock LA, Eatherton MR. Development and experimental validation of a
nickel–titanium shape memory alloy self-centering buckling-restrained brace. Engineering
Structures 2012;40:288–98. https://doi.org/10.1016/j.engstruct.2012.02.037.
[79] Garlock MM, Ricles JM, Sause R. Experimental studies of full-scale posttensioned steel
connections. Journal of Structural Engineering 2005;131:438–48.
https://doi.org/10.1061/(ASCE)0733-9445(2005)131:3(438).
[80] Ricles JM, Sause R, Peng SW, Lu LW. Experimental evaluation of earthquake resistant
posttensioned steel connections. Journal of Structural Engineering 2002;128:850–9.
https://doi.org/10.1061/(ASCE)0733-9445(2002)128:7(850).
[81] Christopoulos C, Filiatrault A, Uang C-M, Folz B. Posttensioned energy dissipating
connections for moment-resisting steel frames. Journal of Structural Engineering
2002;128:1111–20.

226
[82] Vasdravellis G, Karavasilis TL, Uy B. Finite element models and cyclic behavior of self-
centering steel post-tensioned connections with web hourglass pins. Engineering Structures
2013;52:1–16.
[83] Kim H-J, Christopoulos C. Numerical models and ductile ultimate deformation response of
post-tensioned self-centering moment connections. Earthquake Engineering & Structural
Dynamics 2009;38:1–21.
[84] Moradi S, Alam MS. Finite-element simulation of posttensioned steel connections with
bolted angles under cyclic loading. Journal of Structural Engineering 2015;142:04015075.
[85] Moradi S, Alam MS, Milani AS. Cyclic response sensitivity of post-tensioned steel
connections using sequential fractional factorial design. Journal of Constructional Steel
Research 2015;112:155–66.
[86] Rojas P, Ricles JM, Sause R. Seismic performance of post-tensioned steel moment resisting
frames with friction devices. Journal of Structural Engineering 2005;131:529–40.
https://doi.org/10.1061/(ASCE)0733-9445(2005)131:4(529).
[87] Porter KA, Kiremidjian AS, LeGrue JS. Assembly‐based vulnerability of buildings and its
use in performance evaluation. Earthquake Spectra 2001;17:291–312.
https://doi.org/10.1193/1.1586176.
[88] Deierlein G. Overview of a framework methodology for earthquake performance assessment.
Performance-Based Seismic Design: Concepts and Implementation, Bled, Slovenia: 2004, p.
15–26.
[89] Garlock MM, Sause R, Ricles JM. Behavior and design of posttensioned steel frame systems.
Journal of Structural Engineering 2007;133:389–99.
[90] Garlock MM, Ricles JM, Sause R. Influence of design parameters on seismic response of
post-tensioned steel MRF systems. Engineering Structures 2008;30:1037–47.
[91] Mazzoni S, McKenna F, Scott MH, Fenves GL. The open system for earthquake engineering
simulation (OpenSEES) user command-language manual 2006.

227
[92] Moradi S. Simulation, response sensitivity, and optimization of post-tensioned steel beam-
column connections. Doctoral dissertation. University of British Columbia, 2016.
[93] Moradi S, Alam MS. Lateral load–drift response and limit states of posttensioned steel beam-
column connections: parametric study. Journal of Structural Engineering
2017;143:04017044.
[94] Garlock MM, Ricles JM, Sause R. Cyclic load tests and analysis of bolted top-and-seat angle
connections. Journal of Structural Engineering 2003;129:1615–25.
[95] Kishi N, Chen W-F. Moment-rotation relations of semirigid connections with angles. Journal
of Structural Engineering 1990;116:1813–34.
[96] Lin YC, Sause R, Ricles JM. Seismic performance of steel self-centering, moment-resisting
frame: hybrid simulations under design basis earthquake. Journal of Structural Engineering
2013;139:1823–32.
[97] Ricles JM, Sause R, Garlock MM, Zhao C. Posttensioned seismic-resistant connections for
steel frames. Journal of Structural Engineering 2001;127:113–21.
[98] Fragiadakis M, Vamvatsikos D. Fast performance uncertainty estimation via pushover and
approximate IDA. Earthquake Engineering & Structural Dynamics 2010;39:683–703.
[99] Venture SJ, Committee GD, others. Recommended seismic design criteria for new steel
moment-frame buildings. Federal Emergency Management Agency; 2000.
[100] McCormick J, Aburano H, Ikenaga M, Nakashima M. Permissible residual deformation
levels for building structures considering both safety and human elements. Proceedings of
the 14th world conference on earthquake engineering, 2008, p. 12–7.
[101] Ahmadi O. Seismic collapse assessment of self-centering steel moment resisting frame
systems with web friction devices. Lehigh University; 2016.
[102] USGS. Unified Hazard Tool. Available at: https://earthquake.usgs.gov/hazards/interactive/.

228
[103] DeBock DJ, Liel AB. A comparative evaluation of probabilistic regional seismic loss
assessment methods using scenario case studies. Journal of Earthquake Engineering
2015;19:905–37.
[104] FEMA. Multi-hazard loss estimation methodology earthquake model: technical manual.
Washington DC: NIST 2003.
[105] Pagani M, Monelli D, Weatherill G, Danciu L, Crowley H, Silva V, et al. OpenQuake
engine: an open hazard (and risk) software for the global earthquake model. Seismological
Research Letters 2014;85:692–702.
[106] Morfidis K, Kostinakis K. Seismic parameters’ combinations for the optimum prediction
of the damage state of R/C buildings using neural networks. Advances in Engineering
Software 2017;106:1–16.
[107] Cook D, Wade K, Haselton C, Baker J, DeBock D. A structural response prediction engine
to support advanced seismic risk assessment. 11th National Conference in Earthquake
Engineering, Los Angeles, California, USA: 2018.
[108] Chopra AK. Dynamics of structures theory and applications to earthquake engineering.
1995.
[109] Huang Y-N, Whittaker A. Simplified analysis procedures for next-generation
performance-based seismic design. Applied Technology Council, Redwood City, CA; 2012.
[110] Bennett JO, Briggs WL, Badalamenti A. Using and understanding mathematics: A
quantitative reasoning approach. Pearson Addison Wesley Reading; 2008.
[111] Sun H, Burton H, Zhang Y, Wallace J. Interbuilding interpolation of peak seismic response
using spatially correlated demand parameters. Earthquake Engineering & Structural
Dynamics 2018;47:1148–68.
[112] International Code Council. International building code. International Code Council,
Inc(Formerly BOCA, ICBO and SBCCI) 2018;4051:60478–5795.

229
[113] Yan X, Su X. Linear regression analysis: theory and computing. World Scientific; 2009.
[114] Nadaraya EA. On estimating regression. Theory of Probability & Its Applications
1964;9:141–2.
[115] Ho TK. Random decision forests. Proceedings of 3rd international conference on document
analysis and recognition, vol. 1, IEEE; 1995, p. 278–82.
[116] Chen T, Guestrin C. Xgboost: A scalable tree boosting system. Proceedings of the 22nd
acm sigkdd international conference on knowledge discovery and data mining, 2016, p. 785–
94.
[117] McCulloch WS, Pitts W. A logical calculus of the ideas immanent in nervous activity. The
Bulletin of Mathematical Biophysics 1943;5:115–33.
[118] Efron B, Tibshirani RJ. An introduction to the bootstrap. CRC press; 1994.
[119] Breiman L. Random forests. Machine Learning 2001;45:5–32.
[120] Forrester AI, Keane AJ. Recent advances in surrogate-based optimization. Progress in
Aerospace Sciences 2009;45:50–79.
[121] Hussain MS, Javadi AA, Ahangar-Asr A, Farmani R. A surrogate model for simulation–
optimization of aquifer systems subjected to seawater intrusion. Journal of Hydrology
2015;523:542–54.
[122] Asher MJ, Croke BF, Jakeman AJ, Peeters LJ. A review of surrogate models and their
application to groundwater modeling. Water Resources Research 2015;51:5957–73.
[123] Xu Y, Lu X, Cetiner B, Taciroglu E. Real-time regional seismic damage assessment
framework based on long short-term memory neural network. Computer-Aided Civil and
Infrastructure Engineering 2020.
[124] Guan X, Burton H, Sabol T. Python-based computational platform to automate seismic
design, nonlinear structural model construction and analysis of steel moment resisting frames.
230
Engineering Structures 2020;224:111199.
[125] Guan X, Burton H, Shokrabadi M, Yi Z. Seismic drift demand estimation for SMRF
buildings: from mechanics-based to data-driven models. Journal of Structural Engineering
2021. https://doi.org/10.1061/(ASCE)ST.1943-541X.0003004. (Accepted for publication)
[126] Cormen TH, Leiserson CE, Rivest RL, Stein C. Introduction to algorithms. vol. 5. MIT
press Cambridge; 2001.
[127] Zsarnoczay A. NHERI-Simcenter/pelicun: pelicun. 2019.




















