A NEARSHORE PROCESSES FIELD EXPERIMENT AT CAPE HATTERAS, NORTH CAROLINA, U.S.A
Upload
independentCategory
view
0download
0
Coastal Engineering 91 (2014) 200–212
Contents lists available at ScienceDirect
Coastal Engineering
j ourna l homepage: www.e lsev ie r .com/ locate /coasta leng
NearCoM-TVD — A quasi-3D nearshore circulation and sedimenttransport model
Jia-Lin Chen ⁎, Fengyan Shi, Tian-Jian Hsu, James T. KirbyCenter for Applied Coastal Research, University of Delaware, Newark, DE 19716, United States
⁎ Corresponding author.E-mail address: [email protected] (J.-L. Chen).
http://dx.doi.org/10.1016/j.coastaleng.2014.06.0020378-3839/© 2014 Elsevier B.V. All rights reserved.
a b s t r a c t
a r t i c l e i n f oArticle history:Received 24 October 2013Received in revised form 28 April 2014Accepted 2 June 2014Available online 6 July 2014
Keywords:Nearshore community modelTVD-schemeSediment transportSandbar migration
The newly developed nearshore circulation model, SHORECIRC, using a hybrid finite-difference finite-volumeTVD-type scheme, is coupled with the wave model SWAN in the Nearshore Community Model (NearCoM) sys-tem. The newmodeling system is named NearCoM-TVD and the purpose of this study is to report the capabilityand limitation of NearCoM-TVD for several coastal applications. For tidal inlet applications, the model is verifiedwith the semi-analytical solution of Keulegan (1967) for an idealized inlet-bay system. To further evaluate themodel performance in predicting nearshore circulation under intense wave–current interaction over complexbathymetry, modeled circulation patterns are validated with measured data during RCEX field experiment(MacMahan et al., 2010). For sediment transport applications, two sediment transportmodels are applied to pre-dict three sandbar migration events at Duck, NC, during August to October 1994 (Gallagher et al., 1998). Themodel of Kobayashi et al. (2008) incorporates wave-induced onshore sediment transport rate as a function ofthe standard deviation of wave-induced horizontal velocities. The modeled beach profile evolution for two off-shore events and one onshore event agrees well with the measured data. The second model investigated herecombines two published sediment transport models, namely, the total load model driven by currents underthe effect of wave stirring (Soulsby, 1997) and the wave-driven sediment transport model due to waveasymmetry/skewness (van Rijn et al., 2011). The model study with limited field data suggests that the parame-terization of wave stirring is appropriate during energetic wave conditions. However, during low energy waveconditions, the effect of wave stirring needs to be re-calibrated.
© 2014 Elsevier B.V. All rights reserved.
1. Introduction
The Nearshore Community Model (NearCoM) System, is developedwith the support of the National Oceanographic Partnership Program(NOPP) for predicting hydrodynamics, sediment transport andmorpho-logical evolution in coastal regions. Several wave, circulation and sedi-ment modules based on different theories and numerical methods,which can be configured and extended by individual users, are providedby the NearCoM system. Modules in the original NearCoM system aredeveloped specifically for predicting nearshore waves and wave-induced nearshore processes, basically the region between the shore-line and about 10 m water depth. Hence, the applications of NearCoMto ocean-exposed coastal regions are limited. There is a growing de-mand recently to use NearCoM in more general coastal applicationssuch as storm-induced coastal inundation, beach and dune erosion,andwave–current interaction in inlet systems. Therefore, it is necessaryto further improve both the theories and the numerical methods of theoriginal NearCoM system.
Shi et al. (2005) developed amaster program to link thewave, circu-lation and sediment transportmodules and to handle data input/outputand internal data transfer betweenmodules. REF/DIF-1 (Kirby, 1986) isa phase-resolving parabolic refraction–diffraction model for surfacewave propagation, which provides the circulation and sediment trans-port modules with wave forcing and other required wave information.SHORECIRC is a quasi-3D nearshore circulationmodel that incorporatesthe effect of vertical flow structure on the two-dimensional horizontal(2DH) circulation (Svendsen et al., 2004). A frequently-used option ofNearCoM system is to combine thewavemodule REF/DIF-1, the circula-tion module SHORECIRC, and the sediment transport module of Haasand Hanes (2004) for predicting nearshore hydrodynamics and littoralprocesses. The sediment transport formulation of Haas and Hanes(2004) is based on the product of depth averaged alongshore currentvelocity and sediment load characterized by the magnitude of bedshear stress. The effect of wave skewness to increase the littoral trans-port is included through nearbed time-series of wave orbital velocityestimated via an empirical formula as a function of three independentdimensionless wave parameters (Elfrink et al., 2006). Haas et al.(2008) further model waves and currents on beaches with cusps andshow that themodeled currents exhibit significant alongshore variabil-ity which alters the littoral transport. Another option of the NearCoM

201J.-L. Chen et al. / Coastal Engineering 91 (2014) 200–212
system is to couple a 3D ocean circulation module Nearshore POM(Newberger and Allen, 2007a,b) with a wave module following theformulations of Özkan-Haller and Kirby (1999). Newberger and Allen(2007a,b) simulate waves and currents in barred sandy beach inDuck, NC and demonstrate that the magnitude and the vertical struc-ture of cross-shore/alongshore currents vary significantly with tidalmodulation.
In the aspect of numerics, there have been several improvements inthe circulationmodel SHORECIRC since it is originally released. The orig-inal version of SHORECIRC is based on the governing equations writtenin Cartesian coordinates and discretized by using a finite differencescheme. The time stepping is computed by a predictor–correctorscheme, while the spatial discretization is calculated by a second-order central differencing scheme. A curvilinear version of SHORECIRCis developed based on a coordinate transformation from Cartesian to ageneralized curvilinear grid system (Shi et al., 2003). The curvilinearsolver of SHORECIRC was further enhanced by using a CFL-free numer-ical scheme in order to improve computational efficiency (Shi et al.,2007). Although the recent version with a CFL free numerical schemeis efficient when using a large time step, a source of inaccuracy,knownas theADI effect (caused by anextremely large Courant number)exists when simulating flow fieldwith complex geometries (Casulli andCheng, 1992).
To extend the application of NearCoM System to a large-scale beachsystem adjacent to an inlet under the effect of wind waves, Shi et al.(2011) integrated the curvilinear grid SHORECIRC and the spectralwave model SWAN. SWAN is a large-scale wave generation and trans-formation model capable of predicting spatial inhomogeneities ofwave field due to wind-fetch and sea bed change (Booij et al., 1999).The coupled model has been validated with the observed waves andcurrents during a field experiment conducted near the mouth of SanFrancisco Bay and the nearby Ocean Beach (Shi et al., 2011). Model re-sults show that in contrast to the alongshore uniform beachwith homo-geneous wave setup, significant spatial variations are observed alongthe Ocean Beach due to wave refraction over the ebb-tidal shoal.
A new version of SHORECIRC is developed by using a hybrid finite-difference finite-volume, TVD-type scheme (Toro, 2009). Whenmodeling many coastal processes with abrupt changes or discontinu-ities, such as tidal bore propagation, breaker zones, and moving shore-lines, conventional finite-difference schemes may produce unphysicaloscillations. On the other hand, the TVD type finite volume schemeallows for robust treatment of discontinuities through the shock captur-ing mechanism. A conservative form of SHORECIRC equations, differentfrom the contravariant-only form in Shi et al. (2003), is derived in orderto use the hybrid finite-difference finite-volume method. A MUSCLreconstruction technique, which is accurate up to the fourth order(Erduran et al., 2005), is used in the spatial discretization. In contrastto previous temporal schemes, which usually require uniform time-stepping, the present model uses adaptive time stepping based on theRunge–Kutta method. Regarding model efficiency, it is necessary to in-tegrate the wave model SWAN, the circulation model SHORECIRC, andthe sediment transport module into a single parallelized model frame-work. Therefore, the newly developed SHORECIRC, coupled with thewave model SWAN and several sediment modules in the NearCoM sys-tem is named NearCoM-TVD. NearCoM-TVD is fully parallelized withthe Message Passing Interface (MPI) domain decomposition method.The domain is subdivided intomultiple regions and assigned to separateprocessor cores. The MPI with non-blocking communication is used toexchange data between neighboring processors. The performance ofparallelized system has been tested in Shi et al. (2013).
The main objective of this paper is to present the newly improvedNearCoM model package, namely the NearCoM-TVD. To demonstratethe capability and limitation of the newly developed model, NearCoM-TVD is verified/validated with a range of coastal hydrodynamic applica-tions. The second purpose of this study is to evaluate the capability ofseveral nearshore sediment transport models (Kobayashi et al., 2008;
Soulsby, 1997; van Rijn, 2011) newly incorporated into the NearCoM-TVD model package for predicting nearshore morphological evolution.The remaining of this paper is organized as follows. Section 2 presentsthe model formulation of SHORECIRC, SWAN, and the sedimenttransport models used in this study. Section 3 is devoted to modelverification/validation of hydrodynamics for tidal inlet system andwave-induced nearshore circulation over complex bathymetry.Section 4 focuses on validation of nearshore sediment transport withfield data measured at Duck, NC for two offshore sandbar migrationevents and one onshore migration event (Gallagher et al., 1998).Conclusions and future work are summarized in Section 5.
2. Model formulation and governing equations
2.1. SHORECIRC formulation
SHORECIRC is a quasi-3D nearshore circulation model. It is a two-dimensional horizontal (2DH) model which incorporates the mixingeffect induced by the vertical variation of wave-induced horizontalcirculation. In Putrevu and Svendsen (1999), the instantaneous hori-zontal velocity in Cartesian coordinates (x1, x2) is split as
uinsα ¼ u0
α þ uwα þ uα þ u1α ð1Þ
where α=1, 2, and uα′ , uwα, uα and u1α are, respectively, the turbulencecomponent, the wave component, the component of depth-averagedand short-wave-averaged velocity, and the vertical variation of theshort-wave-averaged velocity.
The depth-averaged and short-wave-averaged velocity uα is definedby the ‘Lagrangian averaging’ as
uα ¼ 1H
Z ζ
−huinsα dz ð2Þ
where ζ is the instantaneous surface elevation. This definition is differentfrom other versions of SHORECIRC, such as Haas et al. (2003) who usethe ‘Eulerian averaging’ concept.
The complete SHORECIRC equations can be expressed in Cartesiancoordinates (x1, x2) as (Svendsen et al., 2004)
∂η∂t þ
∂Huα
∂xα¼ 0 ð3Þ
∂Huα
∂t þ Huαuβ
∂xβþ f α þ gH
∂η∂xα
þ 1ρ∂Tαβ
∂xβþ 1ρ∂Sαβ∂xβ
þ τbαρ
− τsαρ
þ ROT ¼ 0
ð4Þ
where η represents thewave-averaged surface elevation, andH= η+ hwith h is the still water depth. In Eq. (4), fα represents the Coriolis forceterm which was not considered in the previous SHORECIRC equations(Putrevu and Svendsen, 1999). Tαβ, Sαβ, ταs and ταb are the depth-integrated Reynolds stress, the wave-induced radiation stress(Longuet-Higgins and Stewart, 1962, 1964), the surface shear stress,and the bottom shear stress, respectively. ROT represents the rest ofthe terms associated with 3D dispersion which are not presented herebecause they are not involved in the coordinate transformation to bediscussed next. The detail of 3D dispersion terms can be found inPutrevu and Svendsen (1999).
In this section, we derive a conservative form of the equations ingeneralized curvilinear coordinates in order to use the TVD numericalscheme. The present approach follows Shi and Sun (1995) who useboth Cartesian and contravariant variables in the derivation of the mo-mentum equations. The advantage of using a conservative form versusthe contravariant-only form is that a conservative form can be imple-mented by using a hybrid numerical scheme with all forcing terms in

202 J.-L. Chen et al. / Coastal Engineering 91 (2014) 200–212
vector form in Cartesian coordinates (Shi et al., 2003). For example, theradiation stress term Sαβ uses the original form defined in Cartesian co-ordinates, hence there is no need to make a transformation for thesecond-order tensor. The disadvantage is that the conservative form ofthe equations contains both Cartesian and the contravariant compo-nents. However, in terms of the hybrid numerical scheme used in thestudy, it is convenient to solve both of the two variables using an explicitscheme, rather than the implicit numerical scheme used in Shi et al.(2007).
A curvilinear coordinate transformation is introduced in the generalform
ξ1 ¼ ξ1 x1; x2ð Þ; ξ2 ¼ ξ2 x1; x2ð Þ ð5Þ
where (ξ1, ξ2) are the curvilinear coordinates. We use superscript indi-ces, i.e., ()α, to represent the contravariant component and subscript in-dices for the Cartesian component of a vector. The relationship betweenthe Cartesian component uα and the contravariant component uα, canbe written as
uα ¼ uβLαβ ð6Þ
where
Lαβ ¼ ∂ξα
∂xβð7Þ
Using the chain rule, the derivative of a function Fwith respect to xα inthe Cartesian coordinates can be expressed in the curvilinear coordinatesξα by
∂F∂xα
¼ Lβα∂F∂ξβ
ð8Þ
Using the metric identity law (Thompson et al., 1985)
∂∂ξα JLαβ
� �≡ 0 ð9Þ
where J is the Jacobian matrix, Eq. (8) can then be rewritten as
∂F∂xα
¼ 1J∂FJLβα∂ξβ
ð10Þ
Using Eq. (10), the conservative form of SHORECIRC equations incurvilinear coordinates can be written as
∂η∂t þ
1J∂ JPα
∂ξα ¼ 0 ð11Þ
∂Huα
∂t þ 1J
∂∂ξβ
JPβuα þ 12g η2 þ 2ηh� �
JLβα
� �þ f α−gη
1J
∂∂ξβ
hJLβα� �
þ 1ρ1J
∂∂ξγ Sαβ JL
γβ
� �þ 1
J∂∂ξγ ταβ JHLγβ
� �þ τbα
ρ− τsα
ρþ ROT ¼ 0
ð12Þ
In Eqs. (11) and (12), Pα = Huα, denotes the contravariant compo-nent of volumeflux. On the other hand, the Coriolis force fα is representedby the Cartesian components, i.e., − fcHv, fcHu, where fc is Corioliscoefficient, and Sαβ represents the Cartesian component of radiationstress. In the present application, the divergence of radiation stresses(the fifth term of Eq. (12)) is obtained directly from the wave moduleSWAN. Finally, ταβ represents the Cartesian component of turbulentshear stress, and ταb and ταs are the Cartesian components of bottom stressand wind stress.
The surface gradient term (the fourth term of Eq. (4)) is treated fol-lowing Shi et al. (2011) to obtain well-balanced momentum equationsin a MUSCL-TVD scheme in a general order. The expression in curvilin-ear coordinates can be written as
gHJ∂η∂xα
¼ ∂∂ξα
12g η2 þ 2ηh� �
JLαβ
� �−gη
∂∂ξα hJLαβ
� �ð13Þ
The wind-induced surface stress in SHORECIRC is computed as(Church and Thornton, 1993):
τsα ¼ CdwρajWjWα ð14Þ
where W is the wind speed at 10 m elevation above the water surface,ρa represents air density, Cdw is the drag coefficient, which is calculatedfrom the formula recommended by The WAMDI Group (1988).
The wave-averaged bottom stress in SHORECIRC includes wave–current interaction, which is written as (Svendsen and Putrevu, 1990)
τbα ¼ 12Cdρu0 β1ubα þ β2Uwαð Þ: ð15Þ
where Cd is a constant friction factor (e.g., Jonsson, 1966),Uwα is the am-plitude of short-wave particle velocity which can be obtained from thewave module SWAN. ubα is the current velocity at the bottom to bediscussed in Eq. (18), and uo is the magnitude of current velocity, ubα,or themagnitude of wave velocity UwαwhenUwα N ubα. In this formula-tion, the shear stress ταb is contributed by the current velocity, ubα, withweighting factor β1 and the wave velocity, Uwα, with weighting factorβ2. The data from laboratory experiment under the monochromaticwave condition shows that β1 and β2 are functions of Uwα/ubα and theangle between wave and current vectors (Svendsen and Putrevu,1990). In the present model, we set β1 = 1.0, β2 = 0.5 (Shi et al.,2011), and the friction factor Cd can be calculated by using theManningformula to incorporate the effect of water depth H with a givenManning coefficient, M (Gauckler, 1867; Manning, 1891).
Cd ¼ 2gM2=H1=3 ð16Þ
NearCoM-TVD also provides an alternative option to calculate thewave-averaged bottom stress under wave–current interaction basedon Soulsby et al. (1993):
τbα ¼ Y τcα þ τwα� � ð17Þ
where ταc is the current-only bottom stress, ταw is the wave-only bottomstress and Y is parameterized by a set of fitting coefficients (Soulsby,1997; Soulsby et al., 1993). In this study, Eq. (16) is used.
The equation governing the vertical structure of horizontal velocitycan be solved analytically by using the lowest order of the equationgoverning the vertical variation of current:
∂u1α
∂t − ∂∂z νt
∂u1α
∂z
� ¼ Fα ð18Þ
where νt is the eddy viscosity and Fα is a general formof the local forcing(see Eq. (31) in Putrevu and Svendsen, 1999 for more detail). The solu-tion of depth variant current velocity u1α adopted here is the same asthat discussed in Shi et al. (2003). The bottom current velocity ubα isevaluated as the summation of uα and u1α at z = −h. More detailedmodel formulation is documented in Shi et al. (2013).

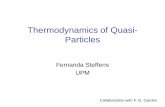
Fig. 1. Definition of incident wave angle and beach direction in Kobayashi et al. (2008)sediment transport model.
203J.-L. Chen et al. / Coastal Engineering 91 (2014) 200–212
2.2. SWAN model equations
SWAN (Booij et al., 1999) is a spectral wave model which solves thewave action balance equation. The wave action N is defined by
N ¼ E ξα ;σ ; θ; t� �
=σ ð19Þ
in which E is thewave energy density, σ is the relative angular frequen-cy, and θ is the propagation direction of each wave component. Thetensor-invariant form of the governing equation of N in the curvilinearcoordinates can be written as
∂N∂t þ 1
J
∂ JC0αg
� �∂ξα þ
∂ C0
gσN� �∂σ þ
∂ C0
gθN� �∂θ ¼ S
σð20Þ
where C0αg represents the contravariant component of the energy prop-
agation speed which can be obtained by using the following coordinatetransformation
C0αg ¼ C
0
gβLαβ ð21Þ
with C0
gβ¼ C
0
gx;C0
gy
� �in rectangular Cartesian coordinates. Moreover,
C0
gσ andC0
gθ denote energy propagation speeds in theσ and θ-spaces, re-spectively. S is a source or sink terms representing energy changes dueto the effects of wave generation, dissipation and nonlinear wave–wave
interactions. The total group velocityC0
gα, the relative frequencyC0
gσ, and
the propagation speed C0
gθ under the effect of current can be describedas:
C0
gα ¼ 12
1þ 2kHsinh2kH
� σkαjkj2 þ uEα ð22Þ
C0
gσ ¼ ∂σ∂H
∂H∂t þ uE �∇H
� −Cgαk � ∂uE
∂s ð23Þ
C0
gθ ¼ −1k
∂σ∂H
∂H∂mþ k � ∂uE
∂m
� ð24Þ
where Cgα is the total group velocity without current effects, and krepresents the wave number vector. A right-turning system of orthogo-nal (m,s) coordinates is used with m oriented along the iso-phase lineand s orthogonal to m (Holthuijsen et al., 2003). In this study, the ratioof the maximum wave height over water depth is set to be the defaultvalue 0.73 in SWAN. Finally, uEα represents the Eulerian mean currentvelocity, which is calculated as:
uEα ¼ uα−Qwα=H ð25Þ
Following the Lagrangian averaging method, it is assumed that
Qwα ¼ −Z η
−hu1αdz ð26Þ
where Qwα is the short wave flux, calculated by the wave model SWAN.
2.3. Sediment transport models
2.3.1. Kobayashi et al. (2008) modelKobayashi et al. (2008) propose a formulation to calculate sand
transport rate for both bedload and suspended load. In the bedloadformulation, the model incorporates wave-driven onshore sedimenttransport. Through calibration with laboratory and field data, the mag-nitude of this onshore transport rate is parameterized to be proportional
to the root-mean-square (RMS)wave orbital velocity cubed, urms3 . Based
on the quasi-steady form of the Meyer-Peter–Müller formula (e.g.,Ribberink, 1999) the corresponding cross-shore bedload transportrate, qbc, and alongshore bedload transport rate, qbl, are expressed as:
qbc ¼bPb
g s−1ð Þu3rms 1þ U�V
2� þ 2Fmsinθ
� �Gs ð27Þ
qbl ¼bPb
g s−1ð Þu3rms V� 1þ U2
� þ V2�
� �−2rmsinθ
h ið28Þ
with
rm ¼ − U�cosθþ V�sinθð Þ ð29Þ
Fm ¼ V�cosθ−U�sinθ ð30Þ
where (U∗, V∗) = (uE/urms, vE/urms), b is an empirical bedload parameter,Pb is the probability of sediment movement as bedload based on aGaussian distribution. To simplify the discussion here, we define thevector (uE, vE) specifically in the cross-shore/alongshore directions(see Fig. 1) and the direction of the cross-shore transport rate qbc as de-fined as positive onshore. As described inmore detail in Kobayashi et al.(2008), Gs is associated with bottom slope effect.
Suspended sediment transport in Kobayashi et al. (2008) is offshore-directed. The corresponding cross-shore and alongshore suspendedsediment transport rates, qsc and qsl, are calculated as
qsc ¼ auEVs; qsl ¼ vEVs ð31Þ
where a is an empirical suspended load parameter and Vs is defined asthe suspended sediment volume per unit horizontal bottom area. Theempirical parameter a is suggested to be a=0.1 or 0.2 based on labora-tory flume experimental results (Kobayashi et al., 2005). The study ofPayo et al. (2009) concludes that a can be varied between 0.1 and 0.4based on measurements along 20 transects at Duck, NC (Elgar et al.,2001). The suspended sediment volume per unit horizontal bottomarea Vs, is calculated as (Kobayashi and Johnson, 2001)
Vs ¼ PbseBDB þ e f Df
ρg s−1ð Þwf1þ S2b
� �0:5 ð32Þ
where wf is the settling velocity, s is the specific gravity, Pbs is the prob-ability of transport via suspended load and Df is the energy dissipation

204 J.-L. Chen et al. / Coastal Engineering 91 (2014) 200–212
rate due to bottom friction (Kobayashi et al., 2005). In this study, theenergy dissipation rate due to wave breaking DB is calculated directlyfrom the SWAN wave model. The suspension efficiencies associatedwith wave breaking eB and bottom friction ef are suggested to beeB = 0.005 and ef = 0.01. Generally, model results are sensitive to eBand ef. The suggested values are used in the present study without fur-ther calibration. To testwhether themodel can predict the observed on-shore and offshore sandbar migration (Section 4.1), we will primarilyevaluate the sensitivity of the predicted beach profiles on a and b asso-ciated with the magnitude of suspended load (offshore-directed) andbedload (onshore-directed).
2.3.2. Combined Soulsby (1997) and van Rijn et al. (2011) sedimenttransport model
2.3.2.1. Soulsby (1997) sediment transport model. The sediment transportmodel of Soulsby (1997) parameterizes total sediment transport rateunder currents and waves. However, the transport direction in thisformulation is determined by the current while the waves play an im-portant role to enhance the magnitude of transport. Hence, this is acurrent-driven sediment transport formula with wave stirring effect.The total load sediment transport rate can be written as
qt ¼ Asjuj juj2 þ 0:018CD
u2rms
� 1=2−ucr
� �2:41−1:6tanβð Þ ð33Þ
where |u| is themagnitude of current velocity, ucr represents the thresh-old velocity of sediment motion given by Van Rijn (1984) and β is thebed slope. The empirical coefficient As is calculated based on flow andsediment properties through bedload and suspended load. The wavestirring term is parameterized as inversely proportional the drag coeffi-cient CD for current alone, which is calculated as
CD ¼ 0:4ln H=zoð Þ−1
� �2ð34Þ
Through CD, the magnitude of wave stirring in Eq. (34) is inverselyproportional to bed roughness z0. Based on the model assumptions,the total load sediment transport model of Soulsby (1997) is appropri-ate under current-dominated condition where the direction of nettransport is determined by currents. However, it cannot model trans-port directly associated with surface waves, e.g. onshore transportduring less energetic wave conditions in the nearshore. Therefore, it isimportant to further incorporate a wave-driven component in thepresent formulation.
2.3.2.2. van Rijn et al. (2011) sediment transport model. To modelsediment transport driven by wave skewness/asymmetry, the timeseries of wave orbital velocity during wave shoaling and breaking canbe estimated through an empirical formulation suggested by van Rijnet al. (2011) (see also van Rijn (2011)). This empirical formulation canpredict the horizontal asymmetry of skewed wave during the shoalingprocess before breaking as well as the vertical asymmetry of saw-tooth-shaped wave after waves have broken.
The wave orbital velocity is represented by
Uw ¼ U1cos ωtð Þ þ U2cos 2ωt−δð Þ ð35Þ
where U1 and U2 are the velocity amplitude of the first harmonic andthe second harmonic, respectively, and δ is the phase difference. Forinstance, δ = 0 presents a perfect Stokes 2nd order wave profile. Anincrease of δ results in a skewed wave profile, while δ = −90 gives asaw-tooth shaped wave profile. About 30,000 data blocks in theinner surf zone and swash zone (cover the Ursell number between0.004 and 26) are integrated into the empirical formulation. For the pur-pose of computational efficiency, a best-fit 2nd order polynomial
function is used here to obtain umax and umin without reconstructingthe times series:
umax ¼ a1 þ a2δþ a3δ2 þ a4U2=U1 þ a5δU2=U1 þ a6 U2=U1
� �2�
U1
ð36Þ
umin ¼ b1 þ b2δþ b3δ2 þ b4U2=U1 þ b5δU2=U1 þ b6 U2=U1
� �2�
U1
ð37Þ
where a1 = 1.0035, a2 =−0.001, a3 = 0, a4 = 0.9215, a5 = 0.0022,a6 = 0.1071, b1 =−0.8633, b2 = 0.0028, b3 = 0, b4 = 0.5071, b5 =0.0066, and b6 =−0.7507. U1 and U2 can be calculated by the signif-icant wave height and the wave period computed from SWAN andthe local water depth. More details are referred to van Rijn et al.(2011). umax and umin are then used to calculate sediment transportrate based on the formulation reported in Houwman and Ruessink(1996) and van Rijn (2000). Defining the direction of wave propaga-tion as positive onshore, the wave-driven sediment transport rate iswritten as
qw ¼ f swγUALT ð38Þ
where the bulk asymmetry parameter UA is calculated as
UA ¼ u4max−u4
min
u3max þ u3
min
ð39Þ
and LT is calculated as
LT ¼ 0:007g s−1ð Þ ueff−ucr
� �2 ð40Þ
where ueff = |u| + umax is an effective velocity due to current andwaves. Finally, an empirical friction coefficient fsw and phase lag co-efficient γ are suggested to be around 0.3 and 0.2 for typical sandybeaches.
2.3.2.3. Combined model. To model sediment transport rate induced bycurrents and waves, we combine the models of Soulsby (1997) andvan Rijn et al. (2011). The corresponding cross-shore and alongshoresediment transport rates, qc and ql, are expressed as
qc ¼uE
uj j qt þ qwcosθ; ql ¼vEuj j qt þ qwsinθ ð41Þ
where the direction of sediment transport rate is determined by thewave angle θ and vector (uE, vE) in the cross-shore/alongshore direction.When the combined model is used to predict sandbar migration inSection 4.3, we use γ = 0.2 and fsw = 0.4 in Eq. (38).
2.4. Seabed evolution equation
The sea bed evolution equation can be described by using sedimenttransport flux in generalized curvilinear coordinates:
1−pð Þ ∂h∂t þ1J∂ J f morqβL
αβ
∂ξα ¼ 0 ð42Þ
where p is the bed porosity, and fmor is the morphology factor. In thispaper, we set fmor = 1 without accelerating morphological evolution.Eq. (42) is solved by using upwinding 1st order finite difference scheme.The dissipation is minimal due to the small time step used in thecirculation model.

a
205J.-L. Chen et al. / Coastal Engineering 91 (2014) 200–212
3. Model verification/validation
One of the main goals of developing NearCoM-TVD is to extend thenearshore modeling framework into inlet-bay systems for a diverserange of applications (e.g., Shi et al., 2011). Hence, the hydrodynamicmodule of NearCoM-TVD is verified with the solution of Keulegan(1967) for an idealized inlet-bay system. To demonstrate the model'scapability to simulate complicated wave-driven circulations over ripchannels under the effect of non-uniform wave setup, the numericalmodel is also validatedwith RCEX experiment (MacMahan et al., 2010).
3.1. Flow through an idealized tidal inlet
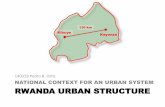
The structure of an inlet-bay system can be idealized by a large bayarea or lagoon connected by a narrow channel to the open ocean.Here, we consider an idealized inlet-bay system of Keulegan (1967) inorder to verify model results with the semi-analytical solution. As canbe seen in Fig. 2, the idealized domain consists of a steep-sided bayconnected to a fixed-width and depth-uniform inlet channel. By assum-ing the time for the tidal wave propagating across the bay is negligible,the surface elevation rises uniformly inside the bay. With a given tidalforcing prescribed at the boundary of the ocean end, the tidal rangeinside the bay is expected to be attenuated and a phase lag exists dueto friction and energy losses as flow passes through the inlet channel.
Under these assumptions, Keulegan (1967) derives a non-dimensional dynamic equation using a momentum balance along theinlet channel in order to describe the tidal flow in the bay. The resultingnon-dimensional governing equation is an ordinary differential equa-tion describing the temporal evolution of tidal elevation in the baythat depends only on the repletion coefficient, K
K ¼ Ac
σaoAB
ffiffiffiffiffiffiffiffiffiffi2gao
pKen þ Kex þ fL=4Rh
ð43Þ
where Ac is the inlet cross-sectional area, L is the inlet length, AB is thesize of the bay, ao is the tidal amplitude in the open ocean, σ is thetidal frequency, f is the Darcy–Weisbach friction factor, and Ken and Kex
are the entrance and exit loss coefficients, respectively. The magnitudeof the repletion coefficient, K, represents the relative bay size. The bay
Fig. 2. (a) Plain view of the idealize inlet and (b) schematic plot of thewater surface alongthe inlet channel (side view) during flood tide. b is the inlet cross-sectional area, h is theinlet depth, Ab is the size of the bay, L is the inlet length, the tidal amplitude inside thebay is represented by ab, and the tidal amplitude in the open ocean is ao. In the numericalexperiment, the given inlet width varies from 400 m to 2000 m to obtain a wide range ofrepletion coefficient, K.
is considered as “large” or “small,” depending on whether the filling iscomplete. When K is very large, the bay is considered to be sufficientlysmall because the filling of the bay by tidal flow is relatively rapid forthe particular combination of bay/inlet dimensions and tidal amplitude(Dean and Dalrymple, 2002).
To verify the circulationmodel of NearCoM-TVD for tidal inlet appli-cations, five simulations using the idealized domain shown in Fig. 2 arecarried out. In each simulation, the inlet depth h is given as 3m, the sizeof the bay Ab is given as 68km2, the inlet length L is given as 7000m, andthe tidal amplitude in the open ocean ao is given as 0.63m. To calculatethe repletion coefficient K, we follow Dean and Dalrymple (2002) andassume the entrance loss and exit loss coefficients to be given as 0.2and 1.0, respectively. Because the parameterization of bottom frictionin NearCoM-TVD is different from that of Keulegan (1967), the Darcy–Weisbach friction factor f needs to be further assumed (Dean andDalrymple (2002) suggests 0.03 b f b 0.08). By specifying the inletwidths for the five simulated cases as b = 400 m, 800 m, 1200 m,1600 m, and 2000 m, we obtain a range of repletion coefficient Kbetween 0.1 to 1.0.
In Fig. 3, the modeled inlet-bay response (the ratio of bay tidalamplitude to that in the open ocean), phase lag and maximum velocitythrough the inlet, shown in dimensionless form as
U0max ¼
Umax
Ab=Acð Þaoσð44Þ
are compared with the semi-analytical solution of Keulegan (1967).NearCoM-TVD can reproduce very well the trend that an inlet-bay sys-tem with smaller repletion coefficients (correspond to smaller inletcross-sectional area) may lead to smaller response, larger phase lagand smaller non-dimensional peak flow velocity through the inlet. Onthe other hand, for large repletion coefficients, the filling of the bay bytidalwater is very rapid and does not involve significant energy loss. Re-sults simulated by NearCoM-TVD also agree well with those from
b
c
Fig. 3. Comparison of (a) inlet bay response, (b) phase lag, and (c) non-dimensional max-imum inlet velocity obtained from Keulegan solution (dash lines) and NearCoM-TVD byassuming friction factor f = 0.02 (circles) and 0.03 (crosses).

a
b
Fig. 4. Time series of free surface elevation (a) and velocity (b) in the bay between theNearCoM-TVD results (bold line) and Keulegan (1967) solution (dashed line) for K =0.5. The surface elevation of ocean tide is shown in thin line in (a).
206 J.-L. Chen et al. / Coastal Engineering 91 (2014) 200–212
Keulegan (1967) by assuming f= 0.02. It is also noted that the quanti-tative agreement is sensitive to the friction factor used (see cross sym-bols shown in Fig. 3 with f = 0.03). However, the general trend oftidal responses, phase lags in the bay and the dimensionless peak veloc-ities through the inlet as a function of K are insensitive to the choice of f.
Fig. 4 presents the time series of free surface elevation in the bay andvelocity through the inlet channel for the case with inlet width b =1200 m, which corresponds to K = 0.5. Comparing with the Keulegan(1967) solution, which produces a completely symmetric tidal flow in
-1.75
-1.25-0.5
-0.5
-0.25-3-1 750 5
a b
Fig. 5. (a) Bathymetry in RCEX experiment. (b) Modeled flow velocity (arrow) and vorticity (cored arrows. (c) Measured flow velocity (arrow) and vorticity (color contour) via drifters.
the bay, NearCoM-TVD shows larger positive tidal amplitude and small-er negative amplitude. The simulated current velocity time series alsoshows horizontal asymmetries. Tidal asymmetries obtained from thepresent model are important hydrodynamic features, which furthercontrols mixing and sediment transport, especially in more complex(or realistic) inlet system.
3.2. Rip current RCEX experiment
To evaluate the capability of NearCoM-TVD in modeling wave–current interaction over a complex nearshore bathymetric system, wesimulate the hydrodynamics measured during the RCEX field experi-ment (MacMahan et al., 2010). The Rip Current EXperiment, RCEX, isconducted in Monterey, California during April–May 2007 to measurenearshore circulation pattern over persistent shoals and rip channelsin a wide surf zone. The location of representative rip channels can befound in Fig. 5(a). Sensors #1 to #5 and #7 to #11 denote the co-located pressure and digital electromagnetic current meters (PUV) inthe cross-shore and the alongshore directions. The modeled velocitiesare compared with field measured data from the current meters (redarrows in Fig. 5(b)) and the drifters (Fig. 5(c)) under nearly shore nor-mal incident waves averaged over the duration of drifter deploymenton yearday 124. The model is able to capture the general flow patternsbut slightly overestimates the observed circulation intensity.
Fig. 6(a) further shows the observed and modeled significant waveheights at the cross-shore transect at y=65m. Themodel is able to pre-dict the cross-shore evolution of significant wave height with reason-able agreement. The alongshore variations of significant wave heightsat the alongshore transect x = 100m inside the surf zone are shown
c
lor contour). Numbers denote the gauge locations with measured flow velocity shown as

50 100 150 200 250 300 350 4000
0.5
1
1.5
x (m)
Hs(
m)
−50 0 50 100 150 200 250 300 350 400 4500
0.5
1
1.5
y (m)
Hs(
m)
a
b
Fig. 6. Comparison of measured (dots) and modeled (solid lines) significant wave height during RCEX in (a) the cross-shore direction observed by gauges 1, 2, 4, and 5, and (b) thealongshore direction observed by gauges 7, 8, 2, 9, 10, and 11.
207J.-L. Chen et al. / Coastal Engineering 91 (2014) 200–212
in Fig. 6(b). Measured data does not show notable trend but the modelis able to capture the overall magnitude.
Fig. 7(a), (b) shows the cross-shore (u) and alongshore (v) currentvelocities in the alongshore transect (x = 100m). The correspondingdepth profile along the transect is also presented in Fig. 7(c) to showthe location of rip channels. Due to the limitation of point measure-ments, we further conduct a model verification with SWAN-Delft3Dmodel results. Delft3D is a depth-resolving model which uses SWANas a wavemodule (Reniers et al., 2004) and hence its mathematical for-mulation is more complete than the depth-integrated approachadopted by NearCoM-TVD. In Geiman et al. (2011), they demonstratethat the flow velocities modeled by SWAN-Delft3D show good agree-ment with those predicted by a wave-resolving model. Here,NearCoM-TVD prediction captures the strong offshore jets (y = −5m,y = 55m, and y = 174m) near the trough of rip channel (y = −24m,y = 54m, and y = 162m) similar to SWAN-Delft3D results. Hence, thepresentmodel is able to predict wave-induced currents under the effectof strong alongshore rhythmicity.
4. Hydrodynamics and cross-shore sediment transportduring DUCK94
NearCoM-TVD is first validated with measured nearshore hydrody-namic during DUCK94 field experiment (Elgar et al., 1998; Feddersen
Fig. 7. Comparison of (a) cross-shore (u) and (b) alongshore (v) velocities in the along-shore transect (x = 100 m) during RCEX experiment for measured data (dots),NearCoM-TVD results (solid lines), and SWAN-Delft3D results (crosses). (c) The bathym-etry profile following the alongshore transect.
et al., 1998). The model is then used to evaluate several sedimenttransport formulations through modeling sandbar migration events(Gallagher et al., 1998).
4.1. Hydrodynamics
Field observations of cross-shore wave-driven circulations at Duck,NC during flood tide on 12th October, 1994 have been modeled byseveral previous studies (Kumar et al., 2011; Newberger and Allen,2007a,b). Fig. 8 shows the cross-shore distribution of significant waveheights, the fraction of breakingwave, Qbr, which is utilized as a thresh-old to determine the roller implementation (Svendsen, 1984), and thebathymetry profile. The predicted cross-shore variation of significantwave heights agrees reasonably well with the measured data.
Fig. 9 shows themeasured andmodeled cross-shore and alongshorecurrent profiles. The modeled cross-shore current profiles capture typi-cal undertow characteristics of seaward-directed velocities near thebottom and shoreward-directed velocities near the surface (Putrevuand Svendsen, 1993). Due to the quasi-3D assumption, the modeledundertow profiles at bar crest show less curvature (x= 240m), similarto that reported by Haas and Warner (2009). Current velocities areover-predicted near the bar trough (x=170m and 190m) and seawardof the bar crest (x = 270m and 300m) where the fraction of wave
a
b
c
Fig. 8. Comparison of measured (dots) and model (solid lines) significant waveheight during Duck 94 field experiment on October 12, 1994, 12:30 EST (high tide).Cross-shore distribution of (a) significant wave height (b) the fraction of breakingwaves (c) bathymetry profile.

a
b
Fig. 9.Comparison ofmeasured (dots) andmodeled velocities (solid lines) duringDuck 94field experiment on October 12, 1994, 12:30 EST (high tide). (a) Cross-shore velocities(b) alongshore velocities.
150 200 250 300 350 400 450 500 550 600−6
−5
−4
−3
−2
−1
0
dept
h(m
)
150 200 250 300 350 400 450 500 550 600−6
−5
−4
−3
−2
−1
0
dept
h(m
)
150 200 250 300 350 400 450 500 550 600−6
−5
−4
−3
−2
−1
0
dept
h(m
)
cross shore location(m)
a
b
c
Fig. 10. Observed (square symbol) sandbar migration (a) on Sept 5th, (b) Oct 15th, and(c) Sept 27th. Blue solid curves are model results using Kobayashi et al. (2008) modelwith α = 0.2 and b = 0.002. The model is initialized by the observed (dashed curves)beach profile on Sept 1st, Oct 10th and Sept 22nd, respectively.
208 J.-L. Chen et al. / Coastal Engineering 91 (2014) 200–212
breaking, Qbr, is relatively small (see Fig. 8b). The predicted alongshorecurrent is generally good, except near the bar trough. The alongshorecurrent velocity at x = 210m is underestimated by the model andthus the location of maximum alongshore velocity appears in the barcrest. This discrepancy is possibly due to a lag effect in momentumtransfer (Reniers et al., 2002, 2004) which is not considered in the pres-ent model. However, to further study sandbar migration, it is importantthat the model reproduces the observed strong cross-shore velocitiesaround the bar crest and weaker velocities in the bar trough.
4.2. Cross-shore sandbar migration
Three sandbar migration events investigated by previous studies(e.g., Gallagher et al., 1998; Hsu et al., 2006) are also modeled here.Event (a) is an offshoremigration event that occurs between September1st to 5th, during amoderatewave energy condition. The location of barcrest moves 40 m seaward during this period. Event (b) is anotheroffshore migration event taking place between the 10th and 15th ofOctober. The bar crestmoves from x=240m to x=340m in the FRF co-ordinate due to strongundertow currents (N0.5m/s) during an energet-icwave condition. Event (c) is an onshoremigration event that occurredbetween September 22nd and 27th. The sandbarmoves 30m landwarddue to wave-induced onshore transport under a less energetic wavecondition with weak undertow currents (Gallagher et al., 1998).
4.2.1. Kobayashi et al. (2008) modelThe bedload component of Kobayashi et al. (2008) parameterizes
the net onshore bedload transport rate as proportional to the cube ofRMS wave orbital velocity. To evaluate the model for predicting bothonshore and offshore sandbar migration, we first set the correspondingempirical coefficient b to be the recommended value of 0.002. On theother hand, the suspended load formulation in Kobayashi et al. (2008)parameterizes the offshore directed transport driven by (undertow)currents with wave stirring effect due to bottom friction and breaking.The corresponding empirical coefficient a is first specified as 0.2 whichis also within the suggested range. The grain diameter on the beach atDuck increases landward from amedian grain diameter of 0.15mm sea-ward of the bar to 0.22 mm in the bar trough (Gallagher et al., 1998).Hence, we specify the settling velocity to be 2.3 cm/s, which corre-sponds to the averaged sand grain of diameter 0.2 mm (Gibbs et al.,1971; Nielsen, 1992). By using the aforementioned values of a = 0.2and b = 0.002, the model is able to predict the two offshore sandbar
migration events (Fig. 10(a) and (b)) and the onshore sandbar migra-tion event (see Fig. 10(c)) with good agreements with the measureddata. Model experiments with settling velocity specified to be as lowas 1.8 cm/s suggest that the predicted features are not sensitive to aslight change of grain size.
The performance of Kobayashi et al. (2008) in predicting onshore/offshore beach profile evolution is clearly dependent on the relativemagnitude between the bedload and the suspended load parameteriza-tions. Hence, more numerical experiments are carried out. By decreas-ing the empirical coefficient associated with onshore sedimenttransport to b= 0.001, onshore bar migration is very weak (essentiallyno change). Hence, the recommended value of b= 0.002 is appropriate.By increasing the empirical coefficient associated with offshore sedi-ment transport to a=0.3, the predicted offshore sandbarmigration be-comes more intense (see Fig. 11(a), (b)). However, it is important topoint out that the model can still predict the onshore sandbar move-ment (see Fig. 11(c)). Our numerical experiments suggest that the for-mulation of Kobayashi et al. (2008) is quite robust to cover a widerange of change in wave intensity and current magnitude during theonshore and offshore migration events and the recommended valuesof a = 0.2 and b = 0.002 are appropriate.
4.2.2. Combined Soulsby (1997) and van Rijn (2011) modelThe total load model of Soulsby (1997) parameterizes sediment
transport following the direction of currents, though waves play a criti-cal role in enhancing themagnitude of transport. In the present applica-tion, sediments are expected to transport offshore due to the undertowcurrent and enhanced by the wave stirring effect. However, onshoresediment transport directly associated with wave orbital velocity

150 200 250 300 350 400 450 500 550 600−6
−5
−4
−3
−2
−1
0de
pth(
m)
150 200 250 300 350 400 450 500 550 600−6
−5
−4
−3
−2
−1
0
dept
h(m
)
150 200 250 300 350 400 450 500 550 600−6
−5
−4
−3
−2
−1
0
dept
h(m
)
cross shore location(m)
a
b
c
Fig. 11. Observed (square symbol) sandbar migration (a) on Sept 5th, (b) Oct 15th, and(c) Sept 27th. Blue solid curves are model results using Kobayashi et al. (2008) modelwith a = 0.3 and b = 0.002. The model is initialized by the observed (dashed curves)beach profile on Sept 1st, Oct 10th and Sept 22nd, respectively.
150 200 250 300 350 400 450 500 550 600−6
−5
−4
−3
−2
−1
0
dept
h(m
)
150 200 250 300 350 400 450 500 550 600−6
−5
−4
−3
−2
−1
0
dept
h(m
)
150 200 250 300 350 400 450 500 550 600−6
−5
−4
−3
−2
−1
0
dept
h(m
)
cross shore location(m)
a
b
c
Fig. 12. Observed (square symbol) sandbar migration (a) on Sept 5th, (b) Oct 15th, and(c) Sept 27th. Blue (red) solid curves are model results of Soulsby (1997) model withthe bed roughness zo = 0.003m (zo = 0.006m). The model is initialized by observed(dashed) beach profile on Sept 1st, Oct 10th and Sept 22nd, respectively.
209J.-L. Chen et al. / Coastal Engineering 91 (2014) 200–212
skewness and asymmetry is missing. Therefore, the wave-driven com-ponent (Houwman and Ruessink, 1996; van Rijn, 2000) with umax andumin calculated through Van Rijn et al. (2011) is combined with thesediment transport model of Soulsby (1997) and implemented inNearCoM-TVD.
Consistentwith the results presented in the previous section, a graindiameter of 0.2 mm is used to model sandbar migration. To better illus-trate the onshore and offshore transport mechanisms associated withthe models, predicted cross-shore beach profiles are first presentedwith only Soulsby (1997) formula adopted (see Fig. 12) for twodifferentchoices of bottom roughness zo= 0.003m and zo= 0.006m. As expect-ed, due to the predominant undertow currents, Soulsby (1997) formulais capable of predicting the two offshore sandbar migration events (seeFig. 12(a), (b)). Good model agreements can be achieved by tuning thebottom roughness zo. A smaller roughness of zo = 0.003m predictsmore significant offshore transport (blue curves in Fig. 12(a), (b)) ascompared to that predicted by using z0 = 0.006m (red curves). Asdiscussed previously, the bottom roughness controls the drag coeffi-cient Cd and hence the magnitude of the wave stirring term. Our sensi-tivity study suggests that the main mechanism driving the offshoretransport is thewave stirring effect that significantly increases themag-nitude of undertow-current-induced transport. However, it is impor-tant to note that Soulsby (1997) formula cannot predict onshoresandbar migration as observed in Fig. 12(c). In fact, instead of onshoremigration, weak offshore migration is predicted regardless of thevalue of roughness used. Clearly, an onshore transport mechanismassociated with waves is needed.
When the combined Soulsby (1997) (with zo = 0.003m) and vanRijn (2011) formulations are used, the numerical model is able to
predict the two offshore sandbar migration events (see blue curves inFig. 13(a) and (b)) which agrees with measured data reasonably well.However, the combined model still cannot predict the onshore sandbarmigration event observed on September 22nd to 27th. A simple numer-ical experiment by removing Soulsby (1997) formulationwhile keepingvan Rijn (2011) formulation suggests that onshore sandbarmigration isindeed predicted (not shown). Hence, it appears that the reason that thecombined formulation cannot predict onshore sandbarmigration is dueto over-prediction of offshore sand transport associated with undertowcurrent in the Soulsby (1997) formulation. During the onshore event,the magnitude of undertow current is often similar or smaller thanthat of the wave orbital velocity and hence, strictly speaking, the flowcondition is already outside of that used to calibrate the Soulsby(1997) formula.
Based on the sensitivity study on bottom roughness zo in the Soulsby(1997) formula shown in Fig. 12, thewave stirring term is the dominantmechanism in determining themajority of the offshore sediment trans-port rate. When wave stirring term is removed in Soulsby (1997) in thecombined formulation, the combined model is able to predict observedonshore sandbar migration (see red-solid curve Fig. 13(c)). However, itis critical to point out that wave stirring term is vital during offshoremi-gration events because the removal of wave stirring term in the com-bined model results in slight onshore migration during the twooffshore migration events (see Fig. 13(a) and (b)). In summary, directcombination of Soulsby (1997) formula for current-induced transport(with wave stirring effect) and van Rijn (2011) for wave-induced trans-port can predict offshore sandbar migration events observed duringDuck94. However, the onshore sandbar migration event is barely pre-dicted due to the over-prediction of current-induced offshore transport

150 200 250 300 350 400 450 500 550 600−6
−5
−4
−3
−2
−1
0
dept
h(m
)
150 200 250 300 350 400 450 500 550 600−6
−5
−4
−3
−2
−1
0
dept
h(m
)
150 200 250 300 350 400 450 500 550 600−6
−5
−4
−3
−2
−1
0
dept
h(m
)
cross shore location(m)
a
b
c
Fig. 13. Observed (square symbol) sandbar migration (a) on Sept 5th, (b) Oct 15th, and(c) Sept 27th. Blue solid curves represent results from the combined Soulsby (1997) andvan Rijn (2011) model. Red solid curves are the corresponding results without the wavestirring term. The bed roughness is specified as Z0 = 0.003 m. The model is initializedby the observed (dashed curves) beach profile on Sept 1st, Oct 10th and Sept 22nd,respectively.
210 J.-L. Chen et al. / Coastal Engineering 91 (2014) 200–212
via wave stirring. It appears that during weak undertow current withmoderatewave orbital velocity typical of less energetic onshore sandbarmigration condition, the wave stirring term need to be suppressed.
We like to point out that the objective of this study is to report theNearCoM-TVD model with several new capabilities, such as sedimenttransport. We believe that by combining the sediment transport formu-lation of Soulsby (1997) appropriate for current-dominant conditionwith the formulation of van Rijn (2011) for wave skewness/asymmetrydominated onshore transport (van Rijn, 2011) is conceptually sound.Our finding that the combined formulation is not able to predict theone onshore sandbar migration event should not be considered conclu-sive. The combined sediment model of Soulsby (1997) and van Rijn(2011) may be improvedwith a better calibration of empirical parame-ters when more field measured datasets are available.
5. Conclusion
A new version of nearshore circulation model, SHORECIRC, is devel-oped by using a hybrid finite-difference finite-volume TVD-typescheme, and coupled with the wave model SWAN in the NearshoreCommunity Model System (NearCoM). Alongwith two sediment trans-port formulations included in the model package, the new model isnamed NearCoM-TVD. In the idealized tidal inlet application, the simu-lated inlet bay response, phase lag, and non-dimensional maximum ve-locity through the inlet are verified with the semi-analytical solution ofKeulegan (1967). The simulated time series of tidal amplitude and ve-locity show vertical asymmetry, which is not observed in the Keulegan's
solution. This nonlinear responsemay play a critical role to further studymixing andmorphological evolution in realistic inlet systems. In the ap-plication to model nearshore circulation in the RCEX field experiment,the simulated nearshore circulation agrees reasonably with the resultscomputed by the more complete SWAN-Delft3D model and themeasured data. These two applications provide us with confidence tofurther use NearCoM-TVD to study realistic inlet processes wherepersistent ebb-tidal shoals often exist at the mouth of the inlet.
Three significant sandbar migration events observed at Duck, NCduring August to October 1994 are modeled here to evaluate the sedi-ment transport models. Kobayashi et al. (2008) sediment transportmodel reproduces both onshore/offshore sand barmigrationwith a sin-gle set of empirical coefficients. For the combined Soulsby (1997) andvan Rijn (2011) formulations, the model is able to predict the observedtwo offshore sandbar migration events with good agreements whencomparing with the measured data. However, the onshore event canonly be predicted when the wave stirring term associated with theSoulsby (1997) formulation is turned off or significantly reduced. Theobjective of this work is to report the new NearCoM-TVD model withseveral new capabilities, including sediment transport. The combinedmodel Soulsby (1997) and van Rijn (2011) model may be further im-provedwith better calibration of parameterswhenmore fieldmeasureddatasets are available.
Acknowledgment
This study is sponsored by the Office of Naval Research, LittoralGeosciences and Optics Program through grant (N00014-10-1-0406),the Delaware Sea Grant (NA10OAR4170084), and the Bureau of OceanEnergy Management (BOEM) grant M10PC00118. We appreciate theuseful comments provided by Nobu Kobayashi and the two anonymousreviewers.
Appendix A. Numerical schemes for SHORECIRC
The compact form of the governing equations can be written as
∂Ψ∂t þ∇ � Θ Ψð Þ ¼ S ð45Þ
whereΨ andΘ(Ψ), the vector of conserved variables and theflux vectorfunction, respectively, are given by
Ψ ¼JηJPJQ
0@
1A ð46Þ
Θ ¼
JPiþ JQ j
JPuþ 12g η2 þ 2ηh� �
JL11
� �iþ JQuþ 1
2g η2 þ 2ηh� �
JL21
� �j
JPvþ 12g η2 þ 2ηh� �
JL12
� �iþ JQvþ 1
2g η2 þ 2ηh� �
JL22
� �j
0BBBB@
1CCCCA: ð47Þ
S ¼
01ρ
Fwx−τbx þ τsx− f x;−ROTx
� �1ρ
Fwy−τby þ τsy− f y−ROTy
� �
0BBB@
1CCCA; ð48Þ
where (u, v) represent Cartesian components of velocity, (P, Q) =(Hu, Hv), the contravariant components of flow flux, (τxb, τyb), (τxb, τyb),(fx, fy) and (ROTx, ROTy) represent the bottom friction, wind stress,Coriolis forcing and the rest of terms in x and y directions, respectively.(Fwx, Fwy) are the gradient of radiation stresses calculated by the wavemodel SWAN.

211J.-L. Chen et al. / Coastal Engineering 91 (2014) 200–212
MUSCL-TVD schemes are implemented in the present model for theflux terms and the first-order derivative terms. The detail of the com-bined form of interface construction using van-Leer limiter can befound in Shi et al. (2013). The numerical fluxes are computed by usinga HLL approximate Riemann solver
Θ ΨL;ΨR
� �¼
Θ ΨL� �
Θ� ΨL;ΨR
� �Θ ΨR� �
ififif
sL≥0sLb 0bsRsR≤0;
8>>><>>>:
ð49Þ
where L is the constructed value at the left-hand side of the interface, Ris the value at the right-hand side of the interface, and
Θ� ΨL;ΨR
� �¼
sRΘ ΨL� �
−sLΘ ΨR� �
þ sLsR ΨR−ΨL� �
sR−sLð50Þ
The wave speeds of the Riemann solver are given by
sL ¼ min VL � n−ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffig hþ ηð ÞL
q;us−
ffiffiffiffiffiffiφs
p� ; ð51Þ
sR ¼ max VR � nþffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffig hþ ηð ÞR
q;us þ
ffiffiffiffiffiffiφs
p� ; ð52Þ
in which us and φs are estimated as
us ¼12
VL þ VR� �
� nþffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffig ηþ hð ÞL
q−
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffig ηþ hð ÞR
qð53Þ
ffiffiffiffiffiffiφs
p ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffig ηþ hð ÞL
qþ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffig ηþ hð ÞR
q2
þVL−VR
� �� n
4ð54Þ
and n is the normalized side vector for a cell face.
References
Booij, N., Ris, R.C., Holthuijsen, L.H., 1999. A third-generation wave model for coastal re-gions. J. Geophys. Res. 104 (C4), 7649–7666.
Casulli, V., Cheng, R.T., 1992. Semi-implicit finite difference methods for three-dimensional shallow water flow. Int. J. Numer. Methods Fluids 15 (6), 629–648.
Church, J.C., Thornton, E.B., 1993. Effects of breaking wave induced turbulence within alongshore current model. Coast. Eng. 20, 1–28.
Dean, R.G., Dalrymple, R.A., 2002. Coastal Processes with Engineering Applications.Cambridge University Press.
Elfrink, B., Hanes, D.M., Ruessink, G., 2006. Parameterization and simulation of near bed or-bital velocities under irregular waves in shallow water. Coast. Eng. 53 (11), 915–927.
Elgar, S., Guza, R.T., Raubenheimer, B., Herbers, T.H.C., Gallagher, E.L., 1998. Spectralevolution of shoaling and breaking waves on a barred beach. J. Geophys. Res. 103,15797–15805.
Elgar, S., Guza, R.T., O'Reilly, W.C., Raubenheimer, B., Herbers, T.H.C., 2001. Wave energyand direction observed near a pier. J. Waterw. Port Coast. Ocean Eng. 127 (1), 2–6.
Erduran, K.S., Ilic, S., Kutija, V., 2005. Hybrid finite-volume finite-difference schemefor the solution of Boussinesq equations. Int. J. Numer. Methods Fluids 49,1213–1232.
Feddersen, F., Guza, R.T., Elgar, S., Herbers, T.H.C., 1998. Alongshore momentum balancesin the nearshore. J. Geophys. Res. 103, 15,667–15,676.
Gallagher, E.L., Elgar, S., Guza, R.T., 1998. Observation of sand bar evolution on a naturalbeach. J. Geophys. Res. 103 (C2), 3203–3215.
Gauckler, P., 1867. Etudes Théoriques et Pratiques sur l'Ecoulement et le Mouvement desEaux. Paris, France C. R. Acad. Sci. Paris France 64, 818–822.
Geiman, J.D., Kirby, J.T., Reniers, A.J.H.M., MacMahan, J.H., 2011. Effects of wave averagingon estimates of fluid mixing in the surf zone. J. Geophys. Res. 116, C04006.
Gibbs, R.J., Mathews, M.D., Link, D.A., 1971. The relationship between sphere size andsettling velocity. J. Sed. Petrol. 41, 7–18.
Haas, K., Hanes, D., 2004. Process based modeling of total longshore sediment transport. J.Coastal Res. 20 (3), 853–861.
Haas, K., Warner, J., 2009. Comparing a quasi-3D to a full 3D nearshore circulation model:SHORECIRC and ROMS. Ocean Model. 91–103.
Haas, K.A., Svendsen, I.A., Haller, M.C., Zhao, Q., 2003. Quasi-three-dimensional modelingof rip current systems. J. Geophys. Res. 108 (C7), 3216.
Haas, K., Check, L., Hanes, D., 2008. Modeling the effects of wave skewness and beachcusps on littoral sand transport. J. Coastal Res. 24 (4C), 141–149.
Holthuijsen, L.H., Herman, A., Booij, N., 2003. Phase-decoupled refraction–diffraction forspectral wave models. Coast. Eng. 49, 291–305.
Houwman, K.T., Ruessink, B.G., 1996. Sediment transport in the vicinity of the shorefacenourishment of Terschelling. Rep., Dept. of Physical Geography, Univ. of Utrecht,Utrecht, The Netherlands.
Hsu, T.-J., Elgar, S., Guza, R.T., 2006. Wave-induced sediment transport and onshore sand-bar migration. Coast. Eng. 53, 817–824.
Jonsson, I.G., 1966. Wave boundary layers and friction factors. Proc. 10th Int. Conf. CoastalEngrg. ASCE, pp. 127–148.
Keulegan, G.H., 1967. Tidal flow in entrances: water level fluctuations of basins in com-munication with the seas. Committee on Tidal Hydraulics Technical Bulletin, No. 14.U.S. Army Engineers Waterways Experiment Station, Vicksburg, MS.
Kirby, J.T., 1986. Higher-order approximations in the parabolic equationmethod for waterwaves. J. Geophys. Res. 91, 933–952.
Kobayashi, N., Johnson, B.D., 2001. Sand suspension, storage, advection, and settling insurf and swash zones. J. Geophys. Res. 106, 9363–9376.
Kobayashi, N., Zhao, H., Tega, Y., 2005. Suspended sand transport in surf zones. J. Geophys.Res. 110, C12009.
Kobayashi, N., Payo, A., Schmied, L., 2008. Cross-shore suspended sand and bedload trans-port on beaches. J. Geophys. Res. 113, C07001.
Kumar, N., Voulgaris, G., Warner, J.C., 2011. Implementation and modification of a three-dimensional radiation stress formulation for surf zone and rip-current applications.Coast. Eng. 58, 1097–1117.
Longuet-Higgins, M.S., Stewart, R.W., 1962. Radiation stress and mass transport in gravitywaves, with application to surf beats. J. Fluid Mech. 13 (4), 481–504.
Longuet-Higgins, M.S., Stewart, R.W., 1964. Radiation stresses in water waves; a physicaldiscussion, with applications. Deep-Sea Res. 11 (4), 529–562.
MacMahan, J., Brown, J., Brown, J., Thornton, E., Reniers, A., Stanton, T., Henriquez, M.,Gallagher, E., Morrison, J., Austin,M.J., Scott, T.M., Senechal, N., 2010.Mean Lagrangianflow behavior on an open coast rip channeled beach: a new perspective. Mar. Geol.268, 1–15.
Manning, R., 1891. On the flow of water in open channels and pipes. Trans. Inst. Civ. Eng.Irel. 20, 161–207.
Newberger, P.A., Allen, J.S., 2007a. Forcing a three-dimensional, hydrostatic, primitive-equation model for application in the surf zone: 1. Formulation. J. Geophys. Res.112, C08018.
Newberger, P.A., Allen, J.S., 2007b. Forcing a three-dimensional, hydrostatic, primitive-equation model for application in the surf zone: 2. Application. J. Geophys. Res. 112,C08019.
Nielsen, P., 1992. Coastal Bottom Boundary Layers and Sediment Transport. World Scien-tific Pub Co Inc.,
Özkan-Haller, H.T., Kirby, J.T., 1999. Nonlinear evolution of shear instabilities of thelongshore current: a comparison of observations and computations. J. Geophys. Res.104, 25,953–25,984.
Payo, A., Kobayashi, N., Yamada, F., 2009. Suspended sand transport along pier depression.J. Waterw. Port Coast. Ocean Eng. 135 (5), 245–249.
Putrevu, U., Svendsen, I.A., 1993. Vertical structure of the undertow outside the surf zone.J. Geophys. Res. 98, 22,707–22,716.
Putrevu, U., Svendsen, I.A., 1999. Three-dimensional dispersion of momentum in wave-induced nearshore currents. Eur. J. Mech. B Fluids 83–101.
Reniers, A.J.H.M., Van Dongeren, A.R., Battjes, J.A., Thornton, E.B., 2002. Linear modeling ofinfragravity waves during Delilah. J. Geophys. Res. 107 (C10), 3137.
Reniers, A.J.H.M., Roelvink, J.A., Thornton, E.B., 2004. Morphodynamic modeling of anembayed beach under wave group forcing. J. Geophys. Res. 109, C01030.
Ribberink, J.S., 1999. Bed-load transport for steady flows and unsteady oscillatory flows.Coast. Eng. 34, 59–82.
Shi, F., Sun, W., 1995. A variable boundary model of storm surge flooding in generalizedcurvilinear grids. Int. J. Numer. Methods Fluids 21 (8), 642–651.
Shi, F., Svendsen, I.A., Kirby, J.T., Smith, J.M., 2003. A curvilinear version of a Quasi-3Dnearshore circulation model. Coast. Eng. 49 (1–2), 99–124.
Shi, F., Kirby, J.T., Newberger, P., Haas, K., 2005. NearCoM master program for nearshorecommunity model. Version 2005.4 — Documentation and user's manual, ResearchReport No. CACR-05-10, Center for Applied Coastal Research Repor. University of Del-aware, Newark, Delaware.
Shi, F., Kirby, J.T., Hanes, D., 2007. An efficient mode-splitting method for a curvilinearnearshore circulation model. Coast. Eng. 54 (11), 811–824.
Shi, F., Hanes, D.M., Kirby, J.T., Erikson, L., Barnard, P., Eshleman, J., 2011. Pressure gradientdriven nearshore circulation on a beach influenced by a large inlet-tidal shoal system.J. Geophys. Res. 116, C04020.
Shi, F., Kirby, J.T., Hsu, T.-J., Chen, J.-L., Mieras, R., 2013. NearCoM-TVD, a hybrid TVD solverfor the nearshore community model. Documentation and User's Manual, ResearchReport No. CACR-13-06, Center for Applied Coastal Research Report. University ofDelaware, Delaware.
Soulsby, R.L., 1997. Dynamics of Marine Sands. Thomas Telford, London.Soulsby, R.L., Hamm, L., Klopman, G., Myrhaug, D., Simons, R.R., Thomas, G.P., 1993. Wave–
current interactionwithin and outside the bottomboundary layer. Coast. Eng. 21, 41–69.Svendsen, I.A., 1984. Mass flux and undertow in a surf zone. Coast. Eng. 8, 347–365.Svendsen, I.A., Putrevu, U., 1990. Nearshore circulation with 3-D profiles. Proc 22th Int.
Conf. Coastal Engrg. ASCE, pp. 241–254.Svendsen, I.A., Haas, K.A., Zhao, Q., 2004. Quasi-3D Nearshore Circulation Model
SHORECIRC: Version 2.0, Research Report, Center for Applied Coastal Research. Uni-versity of Delaware.
Thompson, J.F., Warsi, Z.U., Mastin, C.W., 1985. Numerical Grid Generation: Foundationsand Applications. Elsevier North-Holland, Inc., New York, NY, USA.

212 J.-L. Chen et al. / Coastal Engineering 91 (2014) 200–212
Toro, E.F., 2009. Riemann Solvers and Numerical Methods for Fluid Dynamics: A PracticalIntroduction, Third edition. Springer, New York.
van Rijn, L.C., 1984. Sediment transport, part III: bed forms and alluvial roughness. J.Hydraul. Eng. ASCE 110 (12), 1733–1754.
van Rijn, L.C., 2000. General view on sediment transport by currents and waves. Rep.Z2899, Delft Hydraulics, Delft, The Netherlands.
vanRijn, L.C., 2011. Principles of Fluid FlowandSurfaceWaves in Rivers, Estuaries andCoastalSeas, Including Update of 2011. Aqua Publications, Amsterdam, The Netherlands.
van Rijn, L.C., Tonnon, P.K., Walstra, D.J.R., 2011. Numerical modelling of erosion and ac-cretion of plane sloping beaches at different scales. Coast. Eng. 58, 637–655.
WAMDI Group, 1988. TheWAMmodel: a third generation ocean wave prediction model.J. Phys. Oceanogr. 18, 1775–1810.
Copyright © 2022 FDOKUMEN