Understanding Fractal Analysis? The Case of Fractal Linguistics

Fractal geometry of Weierstrass-type functions
Abel Carvalho
Departamento de Matematica of Universidade de Aveiro, 3810-193 Aveiro, Portugal
Email: [email protected]
Abstract. The aim of this paper is twofold. First, with reference to [6, 13] we show maximal
and minimal box and Hausdorff dimensions over all continuous real functions compactly
supported on Rn, with integrability 0 < p ≤ ∞ and exact smoothness s > 0. We estimate also
the box dimensions of trigonometrical Weierstrass-type functions. Secondly, we investigate
some criteria in order to decide when the graph of a function is not a d-set. Moreover, for
each d between n and n + 1 we construct a function on [0, 1]n the graph of which is a d-set.
Key words. Box and Hausdorff dimensions — measures and d-sets — smoothness — Besov
spaces — Weierstrass functions
2000 Mathematics Subject Classification. 46E35, 28A80, 28A78, 26A30.
1 Introduction
Consider ρ > 1 and 0 < s ≤ 1, let ψ ∈ C∞0 (R) \ 0 be an infinitely smooth and real
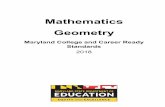
cutoff function, and define ws as the continuous but not differentiable Weierstrass-typefunction
ws(x) = ψ(x)∑
j≥1 ρ−js cos(ρjx), x ∈ R.
By means of a decomposition of ws in its components wj(x) = ρ−jsψ(x) cos(ρjx) offrequencies around ρj for j = 1, 2, ..., according to the Fourier transform — cf. Defin-ition 2.3 below — we obtain the frequency structure qualitatively described in Figure1.
|ξ|
(Fws)(ξ)
ρ ρ2 ρ3
Figure 1: Qualitative rep-resentation of the frequencystructure of ws, according tothe Fourier transform.
———————————————————Research partially supported by Gabinete de Relacoes Internacionais da Ciencia e do Ensino
Superior and by Deutscher Akademischer Austauschdienst (Convenio GRICES-DAAD) and
by the Junior Research Team ‘Fractal Analysis’ of the University of Jena.
Also partially supported by Unidade de Investigacao Matematica e Aplicacoes of Universi-
dade de Aveiro through Programa Operacional ‘Ciencia, Tecnologia, Inovacao’ (POCTI) of
the Fundacao para a Ciencia e a Tecnologia (FCT), cofinanced by the European Community
fund (FEDER).
1

The parameter s means smoothness and has to do with how fast the weight of thecomponents (ρ−js for each wj) decreases to zero when j tends to the infinity. If s weregreater than 1 then the function ws would be smooth (with first derivative continuous)on the real line, and therefore its graph would have fractal dimension 1, the same of thereal line. So, we will deal with the interesting case 0 < s ≤ 1. In Section 2 below wewill precise the concept of smoothness by introducing the class Bs∗
p (Rn) (0 < p ≤ ∞and s > 0) or, shortly, s∗, of all functions f : Rn → R continuous and compactlysupported — denoting this condition by (CCS) — and with an exact smoothness s.The definition of the class s∗ is based — see Definitions 2.5/2.6 below — on a suitableand infinitely smooth resolution of the unity in frequency and a weighted summationof the resolution parts in the sense of the Besov-Triebel-Lizorkin spaces.
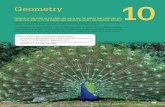
x
f(x)
1
Figure 2: Graph of a realfunction f with a coveringby small dyadic squares —see Definition 3.1 below.
Next we introduce some concepts of fractal geometry of the graphs of real functions.Consider f satisfying (CCS) and kf ∈ N such that supp f ⊂ [−kf , kf ]
n. We definegraph of f by Γ(f) = (x, f(x)) : x ∈ [−kf , kf ]
n.
Let N(ν, f) be the minimum number of dyadic cubes with side length 2−ν in Rn+1
required to cover the graph Γ(f), see Figure 2 for the case n = 1. We define the upperbox dimension by
dimBΓ(f) = limν→∞log2 N(ν,f)
ν.
The lower box dimension dimBΓ(f) is defined in a similar way but with the lowerlimit instead. Falconer gives (see [8], pp. 148-151 with elementary adaptations) theinequality dimBΓ(ws) ≤ 2 − s and for ρ ≥ ρ(s) large gives also dimBΓ(ws) ≥ 2 − s.More general Weierstrass-type functions occur as invariant sets in dynamical systems,see [8], p. 196, exercise 13.7, and it is our aim here to give results for them concerningbox dimensions.
(The term Weierstrass-type function is being used somewhat loosely in the paper.)
In Theorem 5.10 and Remark 5.11 of [6], with reference to [7, 15, 17], we have giventhe maximal and minimal values of dimBΓ(f) and the maximal value of dimBΓ(f) overall functions f ∈ Bs∗
p (Rn). One of the main aims of this paper is to show that thereexists a function belonging to Bs∗
p (Rn) that achieves the minimal lower box dimensionn. In order to do this, we pay special attention to the particular case of Weierstrass-type functions
∑
j≥1 2−λjs cos(2λjx), 0 ≤ x ≤ 1, where λ = (λj)j∈N⊂ R
+ is a rapidlyincreasing sequence. For the graph of such a function, we can estimate from above the
2

lower box dimension by 1 + ελ for a small ελ ≥ 0, giving us also an estimate for theHausdorff dimension through the well known inequality dimH Γ() ≤ dimBΓ(). Werealize, for these particular functions, how useful estimates for the lower box dimensioncan be.
On the other hand, we are interested to show that there are graphs of functions whichare d-sets — see Definition 3.7 below —, since these graphs are sets with special prop-erties that can be advantageous in many circumstances. Such functions are not soabundant and must be chosen carefully in order to define convenient measures on theirgraphs. Graphs of Weierstrass-type functions present a good uniformity of fractalstructure, thus they can play an important role when we are interested on d-sets orHausdorff dimension. This topic is the heart of the paper and will be developed inSection 5, whose main results are the following. At the beginning of the Section wewill find a contradiction with [17], pp. 120-122. In Theorem 5.1, comments beforeit (based in Figure 4) and Proposition 5.2 we will deal with this contradiction (seethe emphasized Remark after that Proposition); afterwards in Theorem 5.3 we fix anappropriate measure to deal with the graphs of functions which are good candidatesfor d-sets; finally, in Theorem 5.6, respective proof and Remark 5.7 we recover the fullresults in connection with [17], pp. 120-122.
Just when we were about to finish a first version of this paper, we got to know theworks [13, 14] of Francois Roueff, that independently developed results in this line ofresearch. In particular he gives the maximal and minimal Hausdorff dimensions overthe class Bs∗
p (Rn).
The structure of the paper is the following. In Section 2 we introduce the class Bs∗p (Rn)
and in Section 3 some geometrical concepts. In Section 4 we give two tables summariz-ing maximal and minimal dimensions. In particular, we deal with that Weierstrass-typefunctions with (λj)j∈N
rapidly increasing. In Section 5 we construct functions eitherwhich are d-sets or not. Longer proofs are shifted to Section 6. Strictly positive con-stants are represented by cindexes or c′, c′′, c′′′, ....
Once again, the author would like to thank Professor Caetano for the choice of thetheme, motivation, English corrections, excellent working environment and his tremen-dous help in organizing the paper. He would like to thank Professor Triebel for hismany valuable comments and advices, as well as his availability during the discussions,clarification and improvement of ideas. The author wish also to thank the referee formany providential suggestions for the layout of the final version of the paper.
2 Besov spaces and the class s∗
We start by recalling the Besov-Triebel-Lizorkin spaces. Afterwards we introduce theclass Bs∗
p (Rn) of all continuous and compactly supported real functions with integra-bility p and exact smoothness s.
Definition 2.1. Let us recalling some basic notations.
(a) Let x = (x1, .., xn) ∈ Rn. Then |x| =√
∑ni=1 x
2i is the Euclidean norm of x.
(b) Let ξ = (ξ1, .., ξn) ∈ Rn. Then ξ x =
∑ni=1 ξixi is the dot product on (ξ, x).
3

(c) Let α = (α1, .., αn) ∈ (N0)n. ThenDα represents the classic derivative operator.
(d) We define the classes C∞(Rn) = ϕ : Rn → C: Dαϕ is bounded and continuousfor all α ∈ (N0)
n and C∞0 (Rn) = ϕ ∈ C∞(Rn): ϕ has a compact support .
Definition 2.2. The Schwartz class, S(Rn), is the family of functions defined by
S(Rn) = ψ ∈ C∞(Rn) with pr,s(ψ) := supRn sup|α|≤s |x|r|Dαψ(x)| <∞, ∀r, s ∈ N0.
The topology of S(Rn) is defined by this family of semi-norms pr,s with r, s ∈ N0.
Definition 2.3. We define (see e.g. [16], p. 13) F : S(Rn) → S(Rn), the Fouriertransform on S(Rn), by (Fψ)(ξ) = 1
(2π)n2
∫
Rn ψ(x)e−iξxdx, ∀ξ ∈ Rn.
Definition 2.4. Let 0 < p ≤ ∞. We define the Lebesgue spaces by
Lp(Rn) = f : Rn → C measurable with ‖f‖Lp(Rn) :=
(∫
Rn |f(t)|pdt)1/p
<∞.
(Standard modification for p = ∞.)
Definition 2.5. Let F be the Fourier transform on S(Rn) and ∗ be the convolutionoperator on S ′(Rn).
(As usual, S ′(Rn) stands for the class of all tempered distributions, however thereader unfamiliar with this concept should not be worried, as our results concern onlycontinuous real functions with a compact support.)
Let ϕ ∈ S(Rn) with supp(Fϕ) ⊂ ξ ∈ Rn : 1/2 ≤ |ξ| ≤ 2 and (Fϕ)(ξ)+(Fϕ)(2−1ξ) =1 if 1 ≤ |ξ| ≤ 2. For all j ∈ N we define ϕj(x) = 2jnϕ(2jx), ∀x ∈ R
n.
Let ϕ0 ∈ S(Rn) with supp(Fϕ0) ⊂ ξ ∈ Rn : |ξ| ≤ 2 and (Fϕ0)(ξ) + (Fϕ)(2−1ξ) = 1if |ξ| ≤ 2.
|ξ|
Fϕ0(ξ) Fϕ1(ξ) Fϕ2(ξ) Fϕ3(ξ)
2 4 8
1
Figure 3: The sequence (Fϕj)j∈N0 is an infinitely smooth resolution of the unity in fre-
quency.
Consider now 0 < p ≤ ∞, 0 < q ≤ ∞ and s ∈ R. We define the classic Besov spaces
Bsp,q(R
n) = f ∈ S ′(Rn) with ‖f‖Bsp,q(Rn) :=
(
∑
j≥0
(
2js‖ϕj ∗ f‖Lp(Rn)
)q)1/q
<∞.
(Standard modification if q = ∞.)
We define also the classic Triebel-Lizorkin spaces F sp,q(R
n) (0 < p < ∞) with thequasi-norm ‖f‖F s
p,q(Rn), by interchanging the order of integration and summation.
Remark:By [16], p. 46 the Besov spaces Bs
p,q(Rn) and Triebel-Lizorkin spaces F s
p,q(Rn) are in-
dependent (equivalent quasi-norms) of the chosen ϕ and ϕ0.
4

The Besov spaces Bsp,q(R
n) and Triebel-Lizorkin spaces F sp,q(R
n) (0 < p < ∞) contain(see [16], 2.3.5) as special cases the Bessel potential spaces H s
p(Rn) = F s
p,2(Rn) if 1 <
p < ∞, Holder-Zygmund spaces C s(Rn) = Bs∞,∞(Rn) if s > 0, and Holder spaces
Cs(Rn) = Bs∞,∞(Rn) if 0 < s 6=integer.
Let us point out some examples and considerations for the case of the Holder spaces,since we will deal with them in Sections 3, 4 and 5 of the paper. Let 0 < s < 1,thus Bs
∞,∞(Rn) = Cs(Rn) stands for the class of all bounded functions f : Rn → C
satisfying|f(x) − f(y)| ≤ c|x− y|s for all x, y ∈ Rn.
For instance, the function ws given as in Section 1, as well as the function κs(x) =1 − |x|s if |x| ≤ 1 (vanishing otherwise), both belong to Cs(R) whenever 0 < s < 1,and have an exact smoothness s since they do not belong to any Cs′(R) for s′ > s.The case of κs does not have interest for us since the Holder exponent (or smoothness)is exactly s only due to the point x = 0, otherwise it is a Lipschitz function — seeDefinition 4.1 below. On the other hand, the function ws as in Section 1, which iscontinuous but not differentiable on x ∈ R whenever ws(x) 6= 0, has a much more richand uniform structure and belongs to the kind of functions which we will deal with.
We are interested only in functions satisfying the condition (CCS), i.e., continuous realfunctions compactly supported on Rn. The following definition of the class Bs∗
p (Rn) —or, shortly, s∗, the class of those functions with integrability p and exact smoothnesss — would be empty for s < 0, however it is non-empty as soon as we consider s > 0,see Theorem 1.1 of [6] and comments before it with reference to [19, 21].
Definition 2.6. Consider 0 < p ≤ ∞, s > 0 and suppose that f is a function satis-fying the condition (CCS). By definition, f belongs to the class Bs∗
p (Rn) if and only iffor all ε > 0 it holds
f ∈ Bs−εp,p (Rn) and f 6∈ Bs+ε
p,p (Rn).
We define also the classes Bs−p (Rn) = f with (CCS) such that f ∈ Bs−ε
p,p (Rn), ∀ε > 0and Bs+
p (Rn) = f with (CCS) such that f 6∈ Bs+εp,p (Rn), ∀ε > 0.
Remark:As a consequence of the definitions, the identity Bs∗
p (Rn) = Bs−p (Rn) ∩Bs+
p (Rn) holds.
We can apply analogous definitions and notations for the case of Bessel potential spaces,Holder-Zygmund spaces and Holder spaces. Namely, we obtain for all s > 0, the iden-tities
F s∗p (Rn) = Bs∗
p (Rn) if 0 < p <∞,
Hs∗p (Rn) = Bs∗
p (Rn) if 1 < p <∞,
and Cs∗(Rn) = C s∗(Rn) = Bs∗∞(Rn).
3 Some concepts in fractal geometry
In this Section we introduce the necessary definitions concerning graphs of continuousreal functions, namely box and Hausdorff dimensions, as well as measures and d-sets.
5

When convenient, we deal with continuous real functions on [0, 1] instead of functionssatisfying (CCS), so we shall carry from the later to the former some definitions bynatural adaptations. At the end of the Section we give the first result of the pa-per, Theorem 3.1, which is a generalization of known estimates of box dimension fortrigonometrical functions of Weierstrass-type.
Definition 3.1. (see [8], pp. 38 and 41 with elementary adaptations)Consider ν ∈ N0 and n ∈ N. Let I =
∏nk=1[jk2
−ν, (jk + 1)2−ν] be a n-cube, i.e., a cubein Rn, where jk ∈ Z, ∀k = 1, .., n. Then we call I a dyadic n-cube.
Definition 3.2. Let f : Rn → R be a function satisfying (CCS). Consider ν ∈ N0
and let N(ν, f) be the minimum number of dyadic (n+ 1)-cubes, with volume 2−ν(n+1),required to cover Γ(f) — see Figure 2 above for the case n = 1. We define the upperbox dimension
dimBΓ(f) = limν→∞log2N(ν, f)
ν.
We define also the lower box dimension dimBΓ(f) = limν→∞log2 N(ν,f)
ν, and if the
two limits coincide we define the box dimension dimB Γ(f) as the common value ofthem.
Definition 3.3. Let ∅ 6= U ⊂ Rn. The diameter of U is |U | = supx,y∈U |x− y|.
Definition 3.4. (a) A measure on Rn is a function µ : B(Rn) → [0,∞], definedover all Borel subsets of Rn, that satisfies µ(∅) = 0, µ(U1) ≤ µ(U2) if U1 ⊆ U2, andµ(
⋃
k∈NUk) =
∑
k∈Nµ(Uk) whenever (Uk)k∈N is a disjoint collection.
(b) A mass distribution on Rn is a measure on Rn that satisfies 0 < µ(Rn) <∞.
(c) The support of a measure µ is the closed set given by supp µ := Rn \⋃
Oµ, wherethe union is taken over all opens sets Oµ ⊂ Rn with µ(Oµ) = 0.
Definition 3.5. (see [8], pp. 25-29)Consider d ≥ 0, δ > 0 and let f : R
n → R be a function satisfying (CCS).
(a) We define H dδ (Γ(f)) = inf
∑
k∈N|Uk|
d : |Uk| ≤ δ and Γ(f) ⊂⋃
k∈NUk.
(b) The quantity H dδ increases when δ decreases. Hence we can define the d-dimensional
Hausdorff measure as H d(Γ(f)) = limδ→0+ H dδ (Γ(f)).
(c) There exists a critical value dΓ(f) ≥ 0 such that H d(Γ(f)) = ∞ for d < dΓ(f) andH d(Γ(f)) = 0 for d > dΓ(f). We define the Hausdorff dimension of Γ(f) as
dimH Γ(f) = dΓ(f).
Remark:(see [8], pp. 43 and 55 with elementary adaptations)(a) We have the inequalities n ≤ dimH Γ(f) ≤ dimBΓ(f) ≤ dimBΓ(f) ≤ n + 1.
(b) Suppose that µ is a mass distribution on Rn+1 and Br are open or closed balls with0 < |Br| = r < 1 and centered at any P ∈ Γ(f) = supp µ. If rd ≤ cµ(Br) for 0 < r < 1then dimBΓ(f) ≤ d, and if rd ≥ cµ(Br) for 0 < r < 1 then dimH Γ(f) ≥ d.
Definition 3.6. Let Πθ and Ξθ be two real valued expressions depending on a para-meter θ, where θ runs over all elements belonging to a given class, which will be clearly
6

defined in each context. Thus, the relation Πθ ≈θ Ξθ means that Πθ and Ξθ arestrictly positive and there exist c1, c2 > 0 such that c1Ξθ ≤ Πθ ≤ c2Ξθ holds for allgiven θ according to the context.
Definition 3.7. Let n ≤ d ≤ n + 1 and f : Rn → R satisfying (CCS). By definition
Γ(f) is a d-set if there exists a mass distribution µ on Rn+1 such that µ(Br) ≈r rd,
where Br are open or closed balls with 0 < |Br| = r < 1 and centered at anyP ∈ Γ(f) = supp µ.
Remark: (see remark of Definition 3.5)If Γ(f) is a d-set then we have the equalities dimH Γ(f) = dimBΓ(f) = dimBΓ(f) = d.
As pointed out by the previous remark, d-sets are a kind of fractals with a quite pre-cise uniformity in its structure, so box and Hausdorff dimensions coincide for it. SomeWeierstrass-type functions apparently preserve a bit of this feature, although rigorousproofs for the conjectured value of Hausdorff dimension have been elusive so far evenfor typical cases.
Concerning box dimension of trigonometrical or more general Weierstrass-type func-tions, see for instance [1, 11]. The following Theorem 3.1 gives estimates for boxdimensions of trigonometrical Weierstrass-type functions. Together with the equalityof Theorem 5.3 below, this Theorem 3.1 generalizes the result given in [8], pp. 148-151.
Theorem 3.1. Consider ρ > 1, (bj)j∈N ⊆ R, s = (sj)j∈N ⊆ R+ ∪ ∞, s :=limj→∞sj > 0 and s := limj→∞sj. Let Ws : [0, 1] → R be defined by Ws(x) =∑
j≥1 ρ−jsj cos(ρjx + θj), where ρ−∞ = 0. Hence we have
dimBΓ(Ws) = 2 − min1, s and dimBΓ(Ws) ≥ 2 − min1, s.
(We should here remind the reader that the proofs are provided in Section 6 below.)
4 Minimal and maximal dimensions
Let 0 < p ≤ ∞ and s > 0. In Theorem 5.10 and Remark 5.11 of [6], with referenceto [7, 15, 17], we have given the maximal and minimal values of dimBΓ(f) and themaximal value of dimBΓ(f) over all functions belonging to Bs∗
p (Rn). On the otherhand, Roueff in [13] gives the maximal and minimal Hausdorff dimensions, so theCorollary 4.2 below complements [6, 13], by giving the minimal lower box dimensionover Bs∗
p (Rn).
Definition 4.1. Let f : R → C. Then f is a Lipschitz function if |f(x1) − f(x2)| ≤cf |x1 − x2|, ∀x1, x2 ∈ R.
The following Theorem 4.1 has an easy proof, see Section 6. It extends [13], 2.5.4, p.29, is also true for γ = ∞ and is crucial in order to prove the Corollary 4.2.
Theorem 4.1. Let ζ : R → R be a bounded and Lipschitz function. Let (aj)j∈N, (bj)j∈N ⊂
R and consider (λj)j∈N ⊂ R+ with λj+1 − λj ≥ c > 0 and γ := limj→∞λj+1
λj. For
7

0 < s ≤ 1 let Ws : [0, 1] → R be defined by Ws(x) =∑
j≥1 ajζ(2λjx + θj), where
|aj| ≤ 2−λjs. Then we have
dimBΓ(Ws) ≤ 1 +1 − s
1 − s+ sγ.
Corollary 4.2. Let φ ∈ C∞0 (Rn) \ 0 be a real function. Consider s > 0 and let Ws :
Rn → R be defined by Ws(x1, .., xn) =∑
j≥1 2−j!s cos(2j!x1), where j! = j(j − 1)...2.1.
Then we have the relations
dimBΓ(φWs) = n and φWs ∈ Bs∗p (Rn) for 0 < p ≤ ∞.
Proof. By [5], p. 36 we have the second relation. On the other hand, by remark(a) of Definition 3.5 and by Theorem 4.1 with γ = ∞, we obtain n ≤ dimBΓ(φWs) ≤dimBΓ(Ws|[0,1]n) ≤ (1+0)+(n−1), where the second inequality is justified by Theorem4.2 of [6] with elementary adaptations.
In fact Corollary 4.2 shows that, for 0 < p ≤ ∞ and s > 0, there exists a contin-uous real function hs = φWs with a compact support on Rn, an integrability p andan exact smoothness s, that achieves the minimal lower box dimension n. Of course,by remark (a) of Definition 3.5 this function achieves also the minimal Hausdorff di-mension dimH Γ(hs) = n, which is given also by Lemme 1 of [13], p. 13. Concerningnon-linearity of lower box and Hausdorff dimensions, a topic closely related with thecorresponding minimal dimensions, see [12, 13, 22].
Tables summarizing maximal and minimal dimensions:
Definition 4.2. Let 0 < p ≤ ∞ and s ∈ R. We define the class Bsp,∞(Rn) = f ∈
S ′(Rn) with limj→∞2js‖ϕj ∗f‖Lp(Rn) <∞ and in the corresponding way we define alsothe classes Bs∗
p (Rn), Bs−p (Rn) and Bs+
p (Rn) if s > 0.
Theorem 4.3. Let 0 < p ≤ ∞ and s > 0. We define (∗), (∗∗) and (∗ ∗ ∗) as follows:
(∗) := n+ 1 if 0 < s ≤ np
and (∗) := n+ 1 − min1, s if s > np,
(∗∗) := n + 1 − smax1, p if 0 < s ≤ 1max1,p
and (∗∗) := n if s ≥ 1max1,p
,
and (∗ ∗ ∗) := n+ 1 − smin1, p if 0 < s ≤ 1min1,p
and (∗ ∗ ∗) := n if s ≥ 1min1,p
.
Hence, the following tables hold. The first table contains maximal and minimal dimen-sions over Bs∗
p (Rn), the second table does the same over Bs∗p (Rn).
Maximal Minimal
dimB (∗) (∗∗)dimB (∗) ndimH (∗ ∗ ∗) n
Maximal Minimal
dimB n + 1 (∗∗)dimB n + 1 (∗∗)dimH n + 1 n
8

According to the mentioned in Section 1 the proof of these tables, as well as all longerproofs of this paper, are provided in Section 6 below.
5 Search and construction of d-sets
This Section mainly deals with geometrical concepts, so not surprisingly we employmany geometrical arguments. Calculations for Hausdorff dimension carry with themthe difficult task of dealing with the Hausdorff measures. However, see remark of Def-inition 3.7, these can be handled easily in the case that Γ(f) is a d-set. The goal is toconstruct functions on [0, 1]n the graphs of which are d-sets, for each d between n andn+ 1.
Remark: Let ζ : R → R be a bounded and Lipschitz function. Consider 0 < s ≤ 1,κ > 0 and νj = 2jκ, ∀j ∈ N. Let fs : [0, 1] → R with fs(x) =
∑
j≥1 2−νjsζ(2νjx), see
Figure 4. Then by Theorem 4.1 we have dimBΓ(fs) ≤ 1 + 1−s1−s+s2κ .
If κ > 0 and 0 < s < 1 then by the last Remark and by remark (a) of Definition 3.5we have also
1 ≤ dimH Γ(fs) ≤ dimBΓ(fs) ≤ 1 + 1−s1−s+s2κ < 2 − s.
In particular, since dimBΓ(fs) = 2− s then by remark of Definition 3.7 it follows thatΓ(fs) cannot be a d-set for any d.
Actually, these inequalities give a contradiction with the following claim, that comesout from [17], pp. 120-122 especially p. 121, when the graph is in R2:
CLAIM: “Let ζ0 ∈ C∞(R) be defined by ζ0(x) =∑
k∈Zω(x− k), with ω(x) = e
− 11−4x2 if
|x| < 12
and ω(x) = 0 otherwise. Consider 0 < s < 1, κ ∈ N with 2κs > 1, νj = 2jκ andfs : [0, 1] → R with fs(x) =
∑
j≥1 2−νjsζ0(2νjx). Then Γ(fs) is a d-set where d = 2− s,
and consequently by remark of Definition 3.7 we have dimH Γ(fs) = 2 − s.”
In the following, we show where this contradiction originated, concerning the functionfs, see Figure 4. In order to do this, we start by stating that the second relation of(16.21) in p. 122 of [17] cannot be true, i.e. µ(Br) ≈r r
d where d = 2 − s and Br
is a ball with |Br| = r and centered at any P ∈ Γ(fs) = supp µ, cannot be true forall 0 < r < 1. Moreover, the procedure of the uniform mass distribution described in[17], p. 122 is inconsistent. Furthermore, the relation µ(Br) ≈r r
d, with d = 2 − sand 0 < r < 1, cannot be true for any measure µ with Γ(fs) = supp µ. And, as wewill see below in Theorem 5.1 (which concerns a much wider class of Weierstrass-typefunctions), that relation is also impossible for any 1 ≤ d ≤ 2, therefore Γ(fs) cannotbe a d-set for any d (as we already concluded in comments that follow the inequalitiesabove).
9

x
fs(x)
Ball Bj: diameter ≈j 2−νj
B′′
j : diameter ≤ c2−νjs
Ball B′
j: diameter
≈j 2−νj(s+2−κ(1−s))
Angle θj:
tan θj ≈j 2νj−1(1−s)
θj
Figure 4: Graph of fs(x) =∑
j≥1 2−νjsζ0(2νj x), where 0 < s < 1, νj = 2jκ with κ ∈ N such
that 2κs > 1, and ζ0 ∈ C1(R) is defined by ζ0(x) =∑
k∈Zω(x − k), with ω(x) = e
− 11−4x2 if
|x| < 12 and ω(x) = 0 otherwise.
Before state and prove Theorem 5.1 we point out the following calculations and geo-metrical arguments, which can be easily generalized. Taking any ball Bj according toFigure 4, with |Bj| ≈j 2−νj , suppose that µ(Bj) ≈j |Bj|
d ≈j 2−νj(2−s). Consider nowappropriate balls B′
j and the angle θj, also according to Figure 4. Then, we have therelation
tan(θj) ≈j supx∈R
∣
∣
∣
∣
(
∑j−1j′=1 2−νj′sζ0(2
νj′x))′
∣
∣
∣
∣
≈j 2νj−1(1−s),
where ()′ represents the classic derivative operator. Therefore |B ′j| ≈j 2−νjs cos(θj) ≈j
2−νjs 1tan(θj)
≈j 2−νjs2−νj2−κ(1−s) ≈j 2−νjσ, where σ := s + 2−κ(1 − s). Hence, since µ is
a measure and looking to Figure 4, we obtain
µ(B′j) ≈j µ(Bj)
(
|B′
j |
|Bj |
)2
≈j 2−νj(2−s)(
2−νjσ
2−νj
)2
= 2−νj(2σ−s) = (2−νjσ)1+ σ−s
σ .
10

Consequently it holds µ(B ′j) ≈j |B
′j|
aσ , where aσ := 1 + σ−sσ
= 1 + 1−s1−s+s2κ .
Hence this relation contradicts the claim µ(Br) ≈r rd with d = 2 − s in (16.21) of
[17], p. 122. Moreover, by slightly more general calculations and the same geometricalarguments, on the basis of Figure 4, we have also the following Theorem.
Theorem 5.1. Consider ζ : R → R a non-constant, periodic and Lipschitz function.
Let 0 < s < 1 and (ρj)j∈N ⊂ R+ such that
(
ρj+1
ρj
)
j∈N
is an unbounded sequence withρj+1
ρj≥ cζ,s sufficiently large. Consider (bj)j∈N ⊂ R and Ws : [0, 1] → R defined by
Ws(x) =∑
j≥1 ρ−sj ζ(ρjx + θj). Then
Γ(Ws) is not a d-set for any 1 ≤ d ≤ 2.
Proof. In fact, if Γ(Ws) were a d-set then by Theorem 4.1 and remark of Definition 3.7we would have d ≤ 2− s, so d < 2. On the other hand, by using the arguments above,based in Figure 4, but with |Bj| ≈j ρ
−1j , tan(αj−1) ≈j ρ
1−sj−1 and |B′
j| ≈j ρ−sj /ρ1−s
j−1 =
ρ−1j (ρj/ρj−1)
1−s instead, then it would hold µ(B ′j)/µ(Bj) ≈j
(
|B′j|/|Bj|
)2, besides the
relation µ(B′j)/µ(Bj) ≈j
(
|B′j|/|Bj|
)d. But this is impossible, because the fraction
|B′j|/|Bj| ≈j (ρj/ρj−1)
1−s is unbounded.
As a matter of fact, the graph Γ(Ws), which is a subset of R2, does not even satisfythe ball condition, i.e. for any η ∈ (0, 1), there exists a ball Brη
⊂ R2 (with diameter|Brη
| = rη) such that Bηrη∩Γ(Ws) 6= ∅ for all Bηrη
⊂ Brη(with diameter |Bηrη
| = ηrη),denoting this relation by (NBC). In fact, for any η ∈ (0, 1), this relation holds bytaking an appropriate ball Brη
:= B′jη
as in the proof above, where jη ∈ N is chosen
such that(
ρjη−1/ρjη
)1−s≤ c0η for some fixed and sufficiently small c0 > 0, so the balls
Bηrηcan be written as Bηrη
= cηBjηfor some cη ≥ 1, in order to satisfy the equivalence
cη(
ρjη−1/ρjη
)1−s≈η η and, more precisely, the equality |Bηrη
|/|Brη| = η.
Proposition 5.2. The relation (NBC) above, concerning η ∈ (0, 1) and Brηand Bηrη
,implies that Γ(Ws) cannot be a d-set for any d < 2. More generally, if a given setE ⊂ R2 does not satisfy the ball condition, then E cannot be a d-set for any d < 2.
(Equivalently, if E is a d-set and does not satisfy the ball condition, then d = 2.)
Proof. If E does not satisfy the ball condition, according to the relation (NBC) abovewith E in place of Γ(Ws), then there is a ball Brη
centered at a point of E withthe following property: there are ≈η (1/η)2 disjoint balls Bηrη
contained in Brη, with
diameter ηrη and centered at points of E; therefore it holds µ(Bηrη)/µ(Brη
) ≈η η2. On
the other hand, if E is a d-set then we have µ(Bηrη)/µ(Brη
) ≈η ηd; consequently we
obtain ηd ≈η η2 for all η ∈ (0, 1), and this means d = 2.
Of course, this easy and short proof is immediately extendable to subsets of Rn; more-over, we may equivalently replace balls by cubes, in particular the proof would comesimpler. See also Proposition 4.3 of [4], pp. 252-253, concerning when the result inProposition above was noticed first (cf. [3], p. 54 and [18], 9.16-9.19, pp. 138-141).
11

Usually, Hausdorff dimension is much more difficult to estimate than box dimensions,but in the present Section we took advantage of the lower box dimension for the goal.By recalling the inequalities given at the beginning of the present Section we can realizehow useful box dimensions can be, since easy estimates for them give also estimates forthe much more cumbersome Hausdorff dimension. Now, we return to the main point.
Remark: We proved that the claim above, concerning the function fs, is false.
Nevertheless, in Theorem 5.6 and Remark 5.7 below we will state that Theorem
16.2 and Remark 16.3 of [17], pp. 120 and 122, both are true. In fact, we only
need a better function, instead of that one fs, for the proofs.
Theorem 5.3. Consider ρ > 1, 0 < s < 1, (bj)j∈N ⊂ R, ζ : R → R a non-constant, pe-riodic and Lipschitz function and Ws : [0, 1] → R defined by Ws(x) =
∑
j≥1 ρ−jsζ(ρjx+
θj). Let µ0(U) = λ (x ∈ [0, 1] : (x,Ws(x)) ∈ U) for Borel sets U ⊂ R2, where λ is theLebesgue measure, and suppose that Br are balls with 0 < |Br| = r < 1 and centered atany P ∈ Γ(Ws). If ρ ≥ ρ(ζ, s) is large then we have the equality dimB Γ(Ws) = 2 − sand the implication
Γ(Ws) is a d-set =⇒ [d = 2 − s and µ0(Br) ≈r r2−s].
(We remind the reader that the longer proofs were shifted to Section 6 below.)
Definition 5.1. The triangular-wave function Λ : R → R is defined by Λ(x) = 2x if0 ≤ x ≤ 1
2, Λ(x) = 2 − 2x if 1
2≤ x ≤ 1 and Λ(x+ 1) = Λ(x), ∀x ∈ R.
x
Ws(x)Ball Bj, with
diameter ≈j %−j
Figure 5: Graph of the function Ws(x) =∑
j≥1 %−jsΛ(%jx), with % = 2k + 1 according to
Corollary 5.4 with Definition 5.1. We show the case % = 9 and s = 0.6.
12

Corollary 5.4. Consider % = 2k + 1 with k ∈ N, 0 < s < 1 , let Λ be the triangular-wave function according to Definition 5.1, and let Ws : [0, 1] → R be defined by Ws(x) =∑
j≥1 %−jsΛ(%jx), see Figure 5. If % ≥ %(s) is large then
Γ(Ws) is not a d-set for any 1 ≤ d ≤ 2.
Proof. Consider j ∈ N and let Bj be a sufficiently small ball with diameter |Bj| ≈j
%−j and centered at a point(
k%−j
2,Ws(
k%−j
2))
, k ∈ 0, .., 2%j, of local maximum or
minimum of Ws, see Figure 5. Then, there is an unique “peak” contained in the ballBj, with a height of ≈j %
−mjs for some mj ∈ N satisfying %−mjs ≈j %−j. Therefore, the
width of the “peak” is ≈j %−mj = (%−mjs)
1s ≈j (%−j)
1s .
Let now µ0(U) = λ (x ∈ [0, 1] : (x,Ws(x)) ∈ U) for Borel sets U ⊂ R2. Then, by
definition of µ0 we have µ0(Bj) ≈j width of the “peak” ≈j (%−j)1s ≈j |Bj|
1s . But we
have 1s> 2 − s, therefore by Theorem 5.3 the graph Γ(Ws) cannot be a d-set.
Remark :By extending Ws by 0 to all R we have the relation Ws ∈ Cs(R) = Bs
∞,∞(R).
Definition 5.2. Let V ∈ N \ 1, H0 = 2k0 + 1 with k0 ∈ N, H = H0V and the
sequence(
W(j)V,H
)
j∈N
of functions W(j)V,H : R → R be defined as follows.
Consider 0 ≤ x ≤ 2 and start with W(0)V,H according to Figure 6a, focusing the attention
in the square [0, 1]2 that just covers the segment given by the graph of W(0)V,H |[0,1].
First iteration: We divide that square, both vertically and horizontally in V ∈N \ 1 equal parts, originating V 2 identical rectangles though only V of them containsegments as diagonal lines, see Figure 6a for V = 4. After that we divide verticallyeach of these V rectangles into identical H0 = 2k0 + 1 rectangles, see Figure 6b forV = 4 and H0 = 3. Next we transform each of those V diagonal lines into the unionof H0 connected diagonal lines, according to Figure 6b.
We obtain W(1)V,H |[0,1], see Figure 6b, having that the projection on the (horizontal) X-
axis of the square that contains the original segment of W(0)V,H |[0,1] was divided into
H = H0V equal parts and the corresponding projection on the (vertical) Y -axis into V
equal parts. We proceed similarly on [1, 2] and obtain W(1)V,H — the Figure 6a originates
Figure 6b if we have V = 4, H0 = 3, so H = 12. This completes the first iterationgiving W
(1)V,H , see Figure 6b.
Second iteration: We make the second iteration by repeating the process applied tothe segment W
(0)V,H |[0,1], as described above, to each one of the H segments that constitute
the graph W(1)V,H |[0,1] — which have equal lengths —, and by proceeding similarly on [1, 2].
Hence we obtain W(2)V,H , whose graph on [0, 1] can be decomposed on H2 segments of equal
lengths, and similarly on [1, 2], see Figure 6c.
Iterations and limit: And so on, in the j th iteration we repeat the process toeach one of the H j−1 segments of W
(j−1)V,H |[0,1] obtaining W
(j)V,H |[0,1], whose graph can be
decomposed on H j segments, and similarly on [1, 2]. Then the j th iteration gives W(j)V,H ,
13

furthermore we extend each W(j)V,H by 0 to all R.
Therefore we arrive to a function WV,H : R → R defined by (uniform convergence)
WV,H := limj→∞
W(j)V,H .
x0 1 2
W(0)V,H(x)
1
Figure 6a: According to Definition 5.2 we start with W(0)V,H . We choose V = 4.
x0 1 2
W(1)V,H(x)
1
Figure 6b: First iteration W(1)V,H , according to Definition 5.2. Here V = 4 and H0 = 3.
x
W(2)V,H(x)
Figure 6c: Second iteration W(2)V,H , according to Definition 5.2, with V = 4, H0 = 3.
14

In fact, Definition 5.2 is equivalent to the definition given in (4.42) of [17], p. 22, ac-cording to the construction suggested by Figure 4.7 of this reference, case 0 < a1 < 2.Likewise, the following Theorem 5.5 is equivalent to Corollary 4.23 of [17], p. 24. How-ever, here we use a different approach with arguments based on the mass distributionµ0 as in Theorem 5.3.
Theorem 5.5. Let V ∈ N \ 1, H0 = 2k0 + 1 with k0 ∈ N, H = H0V and WV,H
according to Definition 5.2. Consider sV,H := logH V . Then the relation WV,H ∈CsV,H (R) = B
sV,H∞,∞(R) holds and
Γ(WV,H|[0,1]) is a d-set with d = 2 − sV,H .
Theorem 5.6. (Theorem 16.2 of [17], p. 120)Let 0 < s < 1 and consider Ws ∈ Cs(Rn) = Bs
∞,∞(Rn) a real function.
(i) Then it holds dimH Γ(Ws) ≤ n + 1 − s.
(ii) There are functions of this type such that dimH Γ(Ws) = n+ 1 − s.
(We should notice that the proofs of the Theorems 5.5/5.6 are provided in Section 6.)
Remark 5.7. (i) Let Ws be as in Step 2 of the proof of Theorem 5.6. As it is statedin this Step 2, actually the restriction Γ(Ws|[0,1]n) is a d-set, where d = n + 1 − s.Therefore, the Remark 16.3 of [17], p. 122 is true for this restriction.
(ii) d-sets and boundaries (16.4 of [17], p. 123)The construction of Γ(Ws|[0,1]n) given in Step 2 of the proof of Theorem 5.6 can be ap-plied to modified situations. For example, the n-dimensional unit cube can be replacedby the n-dimensional unit sphere Sn in Rn+1; instead of the xn+1-direction we may usethe direction of the outer normal. There is a counterpart of the function Ws|[0,1]n nowwith Sn instead of [0, 1]n, the resulting graph is a boundary ∂Ω of a star-like domain Ωin R
n+1.
Estimations from below, concerning Hausdorff dimension of the graphs of functions,are still a difficult problem. However, in [2, 9, 10, 12] and others we find estimatesconcerning box and Hausdorff dimensions of Weierstrass-type functions. In particular,[2] is devoted to functions related with that one of Corollary 5.4. Francois Roueff in[13] developed further results, in particular he gives estimations for box and Hausdorffdimensions of wavelet expansions both in analytical and statistical cases.
6 Proofs
Definition 6.1. If k ∈ R is non-negative, then [k] represents the integer part of k.
Definition 6.2. Let ρ > 1. We generalize several definitions of Sections 2 and 3 byreplacing the number 2 by the number ρ, and adding the index ρ for a distinction.
(a) We generalize the Definition 2.5 by replacing the number 2 by ρ. Hence we define
15

the functions ϕρ and ϕρj for j ∈ N0, and the spaces Bρ,s
p,q(Rn). In the same way that in
Definition 2.6, we define the corresponding classes Bρ,s−p (Rn), Bρ,s+
p (Rn) and Bρ,s∗p (Rn).
By [16], p. 46 these linear spaces Bρ,sp,q(R
n) are independent (equivalent quasi-norms)of ρ. We also generalize Definition 4.2, by defining the classes Bρ,s
p,∞(Rn), Bρ,s−p (Rn),
Bρ,s+p (Rn) and Bρ,s∗
p (Rn). Here we have no independence of ρ.
(b) Like in Definition 3.1 we define Iρ =∏n
k=1[jkρ−ν, (jk + 1)ρ−ν] where jk ∈ Z and
ν ∈ N0. Similarly to Definition 3.2 we define Nρ(ν, f) and the upper box dimension
dimBΓ(f) = limν→∞logρ Nρ(ν,f)
νand the corresponding lower box dimension dimBΓ(f).
By [8], p. 41 this definition of upper and lower box dimensions coincides with Defini-tion 3.2, being independent (same value) of ρ. Because of this we omit the index ρ.
Proof of Theorem 3.1(i) Let φ : R → R with φ ∈ C∞
0 (R)\0, consider the sequence s = (sj)j∈N, and defineWs : R → R by Ws(x) =
∑
j≥1 2−jsj cos(2jx+ θj). The equivalence of the Lemma 4.19of [5], p. 36 gives
φWs ∈ Bs∗p (R) for 0 < p ≤ ∞. (Modification for s = ∞.)
For the function φWs we apply Corollary 5.2 of [6] with ∞ in place of p and apply alsoCorollary 5.4 of [6] with 1 in place of p, obtaining dimBΓ(φWs) = 2 − min1, s. If inplace of φ we put φ1 such that supp φ1 ⊂ [0, 1] and φ2 such that φ2(x) = 1 if x ∈ [0, 1],then we get dimBΓ(φ1Ws) ≤ dimBΓ(Ws|[0,1]) ≤ dimBΓ(φ2Ws), where the first inequal-
ity is justified by Theorem 4.2 of [6]. Therefore we have dimBΓ(Ws|[0,1]) = 2−min1, s.
On the other hand, the equivalence of the Remark 4.20 of [5], p. 37 gives φWs ∈ Bs∗p (R)
for 0 < p ≤ ∞. (Modification for s = ∞.) For the function φWs we apply also Remark5.5-(a) of [6] with 1 in place of p getting dimBΓ(φWs) ≥ 2−min1, s. By choosing φsuch that supp φ ⊂ [0, 1], the Remark 4.3 of [6] gives dimBΓ(Ws|[0,1]) ≥ dimBΓ(φWs),therefore we have also dimBΓ(Ws|[0,1]) ≥ 2 − min1, s.
(ii) Let ρ > 1. In the same way of Definition 6.2 we can generalize (i), including thereferences, by replacing the number 2 by the number ρ. The generalization of theseresults follows with the same proofs, by replacing the number 2 by the number ρ. (Ofcourse we replace the constant 2 only when it does make sense, which is not the casein the constants 2π and (2π)
n2 that must remain unchanged.) We need also in some
cases take the integer part of a non-negative expression and use the relation [K] ≈K Kfor all real K ≥ 1. By taking into account the independence of ρ given in Definition6.2-(b), the proof is complete.
Definition 6.3. Let U be a compact subset of Rn and f : R
n → R a continuous func-tion. We define — see Figure 7 — the oscillation of f over U by oscU(f) =supU f − infU f .
x0.5
f(x)
infI f
supIf
Figure 7: The oscillation of f over
I = [0, 0.5] is oscI(f) = supI f −infI f .
16

Proof of Theorem 4.1(i) We prove the case 1 ≤ γ <∞, since for γ = ∞ the proof is analogous but simpler.
Consider 0 < a ≤ 1 and βk :=[
λk
(
λk+1
λk
)a]
, ∀k ∈ N. First we calculate the sum
Osc(βk,Ws) of the oscillations of Ws over all dyadic intervals I ⊂ [0, 1] with |I| = 2−βk .We have the inequality
Osc(βk,Ws) :=∑
|I|=2−βk oscI(Ws) ≤∑
j≥1 2−λjs∑
|I|=2−βk oscI(
ζ(2λjx+ θj))
.
Because ζ is Lipschitz and bounded, the inner sum can be estimated from above byc2minλj ,βk. Hence Osc(βk,Ws) can be evaluated from above by
c∑k
j=1 2−λjs2λj + c∑
j>k 2−λjs2βk ≤ ck2λk(1−s) + c2βk∑
j>k 2−λjs,
where the estimation of the first sum is justified by the assumption 0 < s ≤ 1. Let0 < ε < γ. There exists some strictly increasing sequence (lk)k∈N ⊂ N such thatβlk
λlk
≥ (γ − ε)a andλlk+1
βlk
≥ (γ − ε)1−a for all k ∈ N. Since λj+1 − λj ≥ c > 0 for j ∈ N,
we have∑
j>k 2−λjs ≤ c2−λk+1s and then
Osc(βlk ,Ws) ≤ clk2βlk
(γ−ε)a(1−s)
+ c′2βlk 2−λlk+1s ≤ clk2βlk
1−s(γ−ε)a + c′2βlk
(1−s(γ−ε)1−a).
(ii) Let N(βlk ,Ws) be the minimum number of dyadic squares, with volume 2−2βlk ,required to cover Γ(Ws). Hence we have the estimate
N(βlk ,Ws) ≤ (Osc(βlk,Ws) + 2) 2βlk .
On the other hand, we have also dimBΓ(Ws) ≤ limk→∞
log2 N(βlk,Ws)
βlk
and therefore
dimBΓ(Ws) ≤ 1+max
0, limk→∞
log2 Osc(βlk,Ws)
βlk
. By applying the last estimate of (i),
the (inner) lower limit can be estimated from above by max
1−s(γ−ε)a , 1 − s(γ − ε)1−a
,
therefore we have dimBΓ(Ws) ≤ 1 + max
1−s(γ−ε)a , 1 − s(γ − ε)1−a
. By choosing 0 <
a ≤ 1 such that γa = 1 − s + sγ we have 1−sγa = 1 − sγ1−a = 1−s
1−s+sγ. The proof is
complete.
Remark:If in the calculations of this proof we take into account all values of a, instead of choos-ing a particular one, then we obtain also the inequality dimBΓ(Ws) ≤ 2 − s.
Proof of Theorem 4.3(i) For the first table, the very difficult part (∗ ∗ ∗) is given by Francois Roueff inthe deep Theorem 4.8 of [13], p. 77. On the other hand, parts (∗) and (∗∗) followby Theorem 5.10 and Remark 5.11 of [6] and the remaining two cells n are proved byCorollary 4.2 and comments that follow the respective proof.
(ii) Concerning the second table, first we prove the first two cells n+1. In order to dothis of course we may assume s > 0 large, e.g. s ≥ n
p. We consider the function Θ0 as
in Definition 5.1 of [6] but replacing Θj by ajΘj, and analogously for Θj,l, where aj = 1
if j is even and aj = 2j( np−s) if j is odd. Then, by the proofs of Theorems 5.6 and 5.8
of [6] with elementary adaptations, we have dimB Γ(Θ0) = n + 1 and Θ0 ∈ Bs∗p (Rn)
17

for 0 < p ≤ ∞. For the proof of the third cell n + 1 we follow the existence argumentapplied in the proof of Theorem 1 of [10]. We simply consider a adapted version of theargument, fitting with the dimension n+1 and the factor aj = 2−js if j odd introduced(analogously as above) in the trigonometrical series, here multiplied by an appropriateinfinitely smooth and real cutoff function.
For the proof of the cell n we may assume s > 0 small, e.g. 0 < s ≤ np, and consider
the function Θ0 as in Definition 5.2 of [6], which has a graph with Hausdorff dimensionn. It remains us to prove the cells (∗∗), for which we use Remark 5.5-(a) of [6] andremark (a) of Definition 3.5 for the part ≥. For part ≤, the case 1 ≤ p ≤ ∞ is provedby Theorem 5.9 of [6] with respective proof, with elementary adaptations concerninggeneral ϕ as in Definition 2.5. The case 0 < p ≤ 1 is proved by part (i) of the proof ofTheorem 3.1.
Proof of Theorem 5.3(i) For each j ∈ N large, consider Ij ⊂ [0, 1] as an interval of length |Ij| = Pζρ
−j, wherePζ is the period of ζ. Then, by classic and repeatedly used arguments, if ρ ≥ ρ(ζ, s) islarge then we have the relation oscIj
(Ws) ≈j ρ−js.
So, the minimum number Nρ(j,Ws) of squares as in Definition 6.2-(b) (with volume
ρ−2j) needed to cover Γ(Ws) satisfies Nρ(j,Ws) ≈jρ−js
ρ−j1
ρ−j = ρj(2−s). Hence, by com-
ments given in that Definition 6.2-(b) we have dimB Γ(Ws) = 2 − s.
(ii) Suppose now that Γ(Ws) is a d-set with respect to some mass distribution µ,according to Definition 3.7. Then by (i) and the remark of that Definition we haved = 2 − s.
For j ∈ N large, let Ij ⊂ [0, 1] be an interval with |Ij| = 3Pζρ−j and write Ij = I ′j ∪I
′′j ∪
I ′′′j as an union of three intervals of length Pζρ−j. By the relation oscIj
(Ws) ≈j ρ−js
of (i), we can cover (Ij×R)∩Γ(Ws) with ≈j 3ρ−js
ρ−j = 3ρj(1−s) balls centered at points P ∈
Γ(Ws) and with diameter ρ−j√
P 2ζ + 1. Then µ(Ij×R) ≤ c3ρj(1−s)
(
ρ−j√
P 2ζ + 1
)2−s
≈j
ρ−j ≈j |Ij| = µ0(Ij ×R). Also by the same relation of (i), there exist ≈j ρj(1−s) disjoint
balls contained in Ij ×R, centered at points P ∈ (I ′′j ×R)∩ Γ(Ws), and with diameter
minρ−j
2, Pζρ
−j. Hence µ(Ij × R) ≥ cρj(1−s)(
minρ−j
2, Pζρ
−j)2−s
≈j ρ−j ≈j |Ij| =
µ0(Ij × R).
So, we have µ(Ij × R) ≈Ijµ0(Ij × R) and then µ(U1 ×R) ≈U1 µ0(U1 × R) for all Borel
sets U1 ⊂ [0, 1], therefore µ(U) ≈U µ0(U) for all Borel sets U ⊂ R2. By Definition 3.7the proof is complete.
Remark:Consider (ρj)j∈N ⊂ R+ with
ρj+1
ρj≥ ρ(ζ, s) large and let Ws : [0, 1] → R be defined by
Ws(x) =∑
j≥1 ρ−sj ζ(ρjx + θj). Then for this Ws we have the implication of Theorem
5.3 and the equality dimBΓ(Ws) = 2 − s. (And ifρj+1
ρjadditionally is bounded then we
have even dimB Γ(Ws) = 2 − s.)
18

Proof of Theorem 5.5(i) We notice that if j ∈ N and x1, x2 ∈ [(k − 1)H−j, kH−j], where k ∈ 1, .., 2Hj,then by the construction of WV,H we have the inequality |WV,H(x1) −WV,H(x2)| ≤V −j = (H−j)
sV,H . Hence, by elementary calculations we obtain WV,H ∈ CsV,H (R).
(ii) Let us prove that Γ(WV,H|[0,2]) is a d-set, where d = 2 − sV,H and WV,H isgiven by Definition 5.2. Consider j ∈ N and fix k ∈ 1, .., 2H j. Then we haveinf [(k−1)H−j ,kH−j ]WV,H = (bj,k − 1)V −j and sup[(k−1)H−j ,kH−j ]WV,H = bj,kV
−j for some
bj,k ∈ 1, .., V j. If we define mj ∈ N such that V −(mj+1) < H−j ≤ V −mj , then for thatfixed k ∈ 1, .., 2Hj we can just cover [(k − 1)H−j, kH−j] × [(bj,k − 1)V −j, bj,kV
−j],
and therefore Γ(
WV,H |[(k−1)H−j ,kH−j ]
)
, with Ξj := V −j
V −mj≈j
V −j
H−j = Hj0 juxtaposed rec-
tangles Rj with dimensions H−j × V −mj .
Observe that |Rj| ≈j H−j for all such rectangles Rj = Rj,α, α = 1, ..,Ξj. On the other
hand, and again for that fixed k ∈ 1, .., 2H j, the division of [(k − 1)H−j, kH−j] ×[(bj,k − 1)V −j, bj,kV
−j] into Ξj rectangles originates a division of Γ(
WV,H |[(k−1)H−j ,kH−j ]
)
into Ξj geometrical parts.
Each of these parts can in its turn be decomposed into Hmj−j0 small parts, and therefore
the overall Ξj parts can be decomposed into ΞjHmj−j0 = Hmj−j small parts, with the
following property: given two of these Hmj−j small parts, either they differ only by atranslation or by a reflection about the Y -axis composed with a translation. So, theircorresponding projections on the X-axis have equal Lebesgue measure L0.
(iii) Let µ0 be defined by µ0(U) = λ (x ∈ [0, 2] : (x,WV,H(x)) ∈ U) for all Borel setsU ⊂ R2, where λ is the Lebesgue measure. We can see that µ0 is a mass distributionon R2 with Γ(WV,H |[0,2]) = supp µ0. On the other hand, for all Ξj rectangles Rj,α = Rj,
α = 1, ..,Ξj, we have the same value for µ0(Rj), since that µ0(Rj) = Hmj−j0 L0. So, we
have the equalities Ξjµ0(Rj,α) = µ0(⋃Ξj
α=1 Rj,α) = µ0 ([(k − 1)H−j, kH−j] × R) = H−j
and therefore the relations
µ0(Rj) = H−j
Ξj≈j
H−2j
V −j ≈j |Rj|2 (H−j)
−sV,H ≈j |Rj|2−sV,H .
Let Br be a ball centered at any P ∈ Γ(WV,H) with 0 < |Br| = r < 1 and definejr := minj ′ ∈ N : |Rj′| ≤
r2. Now we consider all k ∈ 1, .., 2H j, so the ball Br
covers at least one rectangle Rjr= Rjr,k,α and then µ0(Br) ≥ µ0(Rjr
) ≈r |Rjr|d, where
d = 2 − sV,H .
Also we can cover Br ∩ Γ(WV,H |[0,2]) by θ rectangles Rjr= Rjr,k,α, where θ ∈ N does
not depend on r. So we have µ0(Br) ≤ θµ0(Rjr) ≈r |Rjr
|d and therefore we obtain therelations µ0(Br) ≈r |Rjr
|d ≈r rd.
Proof of Theorem 5.6 (Theorem 16.2 of [17], p. 120)
(Step1) Part (i) is proved in [17], p. 121, Step 1. In the following Step 2 we prove (ii).
(Step2) Case n = 1: Consider two bounded sequences (Vj)j∈N⊂ N \ 1 and
(k0,j)j∈N⊂ N, in such way that
∏jj′=1 Vj′ ≈j
∏jj′=1H
sj′, where H0,j = 2k0,j + 1 and
Hj = H0,jVj for all j ∈ N. In order to get this, it is sufficient that for each j ∈ N
we choose Vj and k0,j as follows: If∏j
j′=1 Vj′ ≤∏j
j′=1Hsj′ we choose Vj+1 ≥ Hs
j+1,
19

otherwise we choose Vj+1 ≤ Hsj+1. Let now Ws := W
(1)s : R → R be as in Definition
5.2 but by using in each iteration j ∈ N the numbers Vj and H0,j instead of V andH0, respectively. Then, by the same arguments of the proof of Theorem 5.5 basedin the measure µ
(1)0 := µ0, but with
∏jj′=1 Vj′ and
∏jj′=1H0,j′ in place of V j and Hj
0 ,respectively, we obtain that Ws ∈ Cs(R) and Γ(Ws|[0,1]) is a d-set with d = 2 − s. Byremark of Definition 3.7 we have also dimH Γ(Ws) = 2 − s.
Case n ∈ N \ 1: Consider the function Ws := W(n)s : Rn → R defined by
W(n)s (x) = W
(1)s (x1)
∏ni=2 Λ(xi) for all x = (x1, .., xn) ∈ Rn, where Λ(t) = t + 1 if
−1 ≤ t ≤ 0, Λ(t) = 1 if 0 ≤ t ≤ 1, Λ(t) = 2 − t if 1 ≤ t ≤ 2, and Λ(t) = 0 otherwise.
Let us prove that Γ(W(n)s |[0,1]n) is a d-set with d = n+1−s. For this consider the mea-
sure µ(n)0 (U) defined by µ
(n)0 (U) = λ(n)
(
x ∈ [0, 1]n : (x,W(n)s (x)) ∈ U
)
for all Borel
sets U ⊂ Rn+1, where λ(n) is the Lebesgue measure on Rn.
Let Q(n)r ⊂ Rn+1 be a cube with sides parallel to the axes and centered at any
P (n) := (X1, ..., Xn, Xn+1) ∈ Γ(W(n)s |[0,1]n) = supp µ
(n)0 . If r ∈ (0, 1) is the side length
of Q(n)r and S(n) := x ∈ [0, 1]n : (x,W
(n)s (x)) ∈ Q
(n)r , then we have the identity
S(n) = S(1) × [X ′2, X
′′2 ] × ... × [X ′
n, X′′n], where each [X ′
i, X′′i ], i = 2, .., n, is an in-
terval of the form [X ′i, X
′′i ] = [max0, Xi −
r2,min1, Xi + r
2]. (We consider here
S(1) = x1 ∈ [0, 1] : (x1,W(1)s (x1)) ∈ Q
(1)r , and Q
(1)r ⊂ R2 as the square originated by
the projection of Q(n)r on the plane X1Xn+1.
Therefore we have µ(n)0 (Q
(n)r ) = λ(n)(S(n)) = λ(1)(S(1))
∏ni=2 λ
(1)([X ′i, X
′′i ]), where λ(1) is
the linear Lebesgue measure. On the other hand, the case n = 1 and elementary cal-culations give λ(1)(S(1)) = µ
(1)0 (Q
(1)r ) ≈r r
2−s. Hence µ(n)0 (Q
(n)r ) ≈r r
2−srn−1 = rn+1−s.
By elementary calculations we have also µ(n)0 (B
(n)r ) ≈r r
n+1−s, where B(n)r ⊂ Rn+1 are
balls centered at any P (n) ∈ Γ(W(n)s |[0,1]n) with 0 < |B
(n)r | = r < 1. Hence Γ(W
(n)s |[0,1]n)
is a d-set with d = n+ 1 − s and then we have also dimH Γ(W(n)s ) = n+ 1 − s.
References
[1] Bedford, T. (1989). “The box dimension of self-affine graphs and repellers”. Non-linearity 2, 53-71.
[2] Besicovitch, A. S. and Ursell, H. D. (1937). “Sets of fractional dimensions (V):On dimensional numbers of some continuous curves”. J. London Math. Soc. 32(2), 142-153.
[3] Caetano, A. (2000). “Approximation by functions of compact support in Besov-Triebel-Lizorkin spaces on irregular domains”. Stud. Math. 142 (1), 47-63.
[4] Caetano, A. (2002). “On fractals which are not so terrible”. Fundam. Math. 171(3), 249-266.
[5] Carvalho, A. (2004). “Box dimension and smoothness in function spaces”, preprintCM 04/I-27, Univ. Aveiro.
20

[6] Carvalho, A. (2005). “Box dimension, oscillation and smoothness in functionspaces”. J. Function Spaces and Appl. 3 (3), 287-320.
[7] Deliu, A. and Jawerth, B. (1992). “Geometrical dimension versus smoothness”.Constr. Approx. 8, 211-222.
[8] Falconer, K. (1990). Fractal Geometry, John Wiley, Chichester.
[9] Hu, T.-Y. and Lau, K.-S. (1993). “Fractal dimension and singularities of theWeierstrass type functions”. Transactions of the American Mathematical Society.353, 649-665.
[10] Hunt, B. R. (1998). “The Hausdorff dimension of graphs of Weierstrass functions”.Proc. Amer. Math. Soc. 126, 791-800.
[11] Kaplan, J. L., Mallet-Paret, J., Yorke, J. A. (1984). “The Lyapunov dimension ofa nowhere differentiable attracting torus”. Ergod. Th. Dynam. Sys. 4, 261-281.
[12] Mauldin, R. and Williams, S. (1986). “On the Hausdorff dimension of somegraphs.”. Trans. Amer. Math. Soc. 298, 793-803.
[13] Roueff, F. (2000). “Dimension de Hausdorff du graphe d’une fonction continue:une etude analytique et statistique”, PhD thesis. (Ecole Nationale Superieure desTelecommunications).
[14] Roueff, F. (2003). “New upper bounds of the Hausdorff dimensions of graphs ofcontinuous functions”. Math. Proc. Camb. Phil. Soc. 135, 219-237.
[15] Solomyak, M. (1996). “Piecewise-polynomial approximation of functions fromSobolev spaces, revisited”. M University. Discourses Math. Appl. 3, 7-27.
[16] Triebel, H. (1983). Theory of Function Spaces, Birkhauser, Basel.
[17] Triebel, H. (1997). Fractals and Spectra, Birkhauser, Basel.
[18] Triebel, H. (2001). The Structure of Functions, Birkhauser, Basel.
[19] Triebel, H. (2003). “Fractal characteristics of measures; an approach via functionspaces”. Journ. Fourier Anal. Appl. 9, 411-430.
[20] Triebel, H. (2003). “Non-smooth atoms and pontwise multipliers in functionspaces”. Ann. Mat. Pura Appl. 182, 457-486.
[21] Triebel, H. (2004). “A note on wavelet bases in function spaces”. Orlicz CentenaryVol. Banach Center Publ. 64, 193-205.
[22] Wingren, P. (2000). “Dimensions of graphs of functions and lacunary decomposi-tions of spline approximations”. Real. Anal. Exchange. 26 (1), 17-26.
21
Copyright © 2022 FDOKUMEN