Expo Lineal
13
Universidad de El Salvador Facultad Multidisciplinaria Oriental Departamento de Ciencias Naturales y Matemática Sección Matemática Asignatura: Algebra Lineal II Tema: “Algebra de las transformaciones lineales”. Docente Responsable: María Olga Quintanilla de Lovos Estudiantes: Katie Celina Guevara Barahona Brenda Yamileth Umanzor Mario Nahun Urrutia Morillo Elmer Saúl Hernández Ramos Jairo Fabricio Hernandez Orellana Luis Eduardo Jimenez Madrid Endy Erickson Martinez Campos Cuidad Universitaria, 14 de mayo de 2014.
Transcript of Expo Lineal

Universidad de El Salvador
Facultad Multidisciplinaria Oriental
Departamento de Ciencias Naturales y Matemática
Sección Matemática
Asignatura:
Algebra Lineal II
Tema:
“Algebra de las transformaciones lineales”.
Docente Responsable:
María Olga Quintanilla de Lovos
Estudiantes:
Katie Celina Guevara Barahona
Brenda Yamileth Umanzor
Mario Nahun Urrutia Morillo
Elmer Saúl Hernández Ramos
Jairo Fabricio Hernandez Orellana
Luis Eduardo Jimenez Madrid
Endy Erickson Martinez Campos
Cuidad Universitaria, 14 de mayo de 2014.

Álgebra de las transformaciones lineales
En esta ocasión construiremos nuevas transformaciones lineales a partir de
transformaciones lineales dadas. Se define la suma y la composición de dos
transformaciones lineales; también se define la inversa T-1, y la multiplicidad por
escalar, cT, de una transformación lineal. Además, se introducen dos subespacios
importantes, el núcleo (o kernel) y la imagen, asociadas a una transformación dada.
Comencemos con la suma de dos transformaciones lineales.
Definición 1.
Sean T′: V → W y T″: V → W dos transformaciones lineales.
La suma, T = T′ + T″, de las transformaciones lineales T′ y T″ es función de V a W
definida por
T(v) = (T′ + T″)(v) = T′ (v) + T″ (v)
Para todo v vector en V.
Problema 1.
Demuestre que si T′ y T″ son transformaciones lineales de un espacio vectorial V a un
espacio vectorial W, entonces T′ + T″ es una transformación lineal entre los mismos
espacios vectoriales.
Solución:
Por definición de transformación lineal debemos verificar que se cumplan las
propiedades de adición y multiplicación por un escalar, así:
Sean u y v elementos en V, y c un escalar:
a) (T′ + T″)(u + v) = (T′
+ T″)(u) + (T′ + T″)(v)
b) (T′ + T″)(cu) = c(T′
+ T″)(u)

a) (T′ + T″)(u + v) = T′ (u + v) + T″ (u + v) = T′(u) + T′(v) + T″(u) + T″(v)
= T′(u) + T″(u) + T′(v) + T″(v)
(T′ + T″)(u + v) = (T′
+ T″)(u) + (T′ + T″)(v). Se cumple para la adición.
b) (T′ + T″)(cu) = T′(cu) + T″(cu) = cT′(u) + cT″(u)
= c[T′(u) + T″(u)]
(T′ + T″)(cu) = c(T′
+ T″)(u). Se cumple para la multiplicación por escalar
T′ + T″ es una transformación lineal.
Para evaluar la suma (T′ + T″)(v), primero se determina T′(v), luego T″(v), y finalmente
se forma la suma T′(v) + T″(v).
Ejemplo 1.
Sean T′: R2 → R
2 y T″: R2 → R
2 definidas mediante:
T′ [(x,y)] = (2x – y, x + 4y) y T″ [(x,y)] = (y, x – y).
Para evaluar (T′ + T″)[(2, 1)], primeramente se obtienen
T′ [(2, 1)] = (2(2) - 1, 2 + 4(1)) = (3, 6) y T″ [(2, 1)] = (1, 2 – 1) = (1, 1)
Por lo tanto (T′ + T″)[(2, 1)] = T′ [(2, 1)] + T″ [(2, 1)]
= (3, 6) + (1, 1)
(T′ + T″)[(2, 1)] = (4, 7).
Una manera de construir una nueva transformación lineal a partir de una transformación
lineal dada T, consiste en multiplicar T por un escalar c para formar cT.
Definición 2.
Sea T: V → W una transformación lineal, y c cualquier escalar.
Entonces cT: V → W está definida por
(cT(v)) = c(T(v))
Para todo vector v en V.

Problema 2.
Si T: V → W es una transformación lineal y c un escalar, demuestre que cT es una
transformación lineal.
Solución:
Para demostrar que cT es una transformación lineal, vamos a verificar si se cumplen las
propiedades de adición y multiplicación por un escalar, así:
a) (cT)(u+v) = (cT)(u) + (cT)(v)
b) (cT)(du) = d(cT)(u)
a). (cT)(u+v) = c[T(u+v)]
= c[T(u) + T(v)]
= cT(u) + cT(v)
(cT)(u+v) = (cT)(u) + (cT)(v). La 1era propiedad se cumple.
b). (cT)(du) = c[T(du)]
= c[dT(u)]
= d[cT(u)]
(cT)(du) = d(cT)(u). La 2da propiedad se cumple.
cT es una transformación lineal.
Ejemplo 2.
Supóngase que una transformación lineal T: R2 → R3 está dada por
T [(x, y)]= (3x, 2y, x + y). Obtener (4T) [(-1, 5)].

Solución: Por la definición anterior (4T) [(-1, 5)] = 4(T [(-1, 5)]).
(T [(-1, 5)]) = (3(-1), 2(5), -1+5)
= (-3, 10, 4).
Luego: (4T) [(-1, 5)] = 4(T [(-1, 5)]).
(4T) [(-1, 5)] = 4(-3, 10, 4) = (-12, 40, 16).
(4T) [(-1, 5)] = (-12, 40, 16).
Más importante que la suma de dos matrices y el producto de un escalar y una matriz, es
el producto de dos matrices. La operación de composición de transformaciones lineales
corresponde al producto de matrices.
Definición 3
Sean T′: U → V, y T″: V → W transformaciones lineales. Entonces la función
T′T″: U → W, llamada producto de T′ y T″, o composición de T′ y T″, está definida por
(T″ T′ )(u) = T″ (T′ (u)), para todo u en U.
U V W
T′ T″
T″T′
T″T′(u) = T″(T′(u)) T(u) u
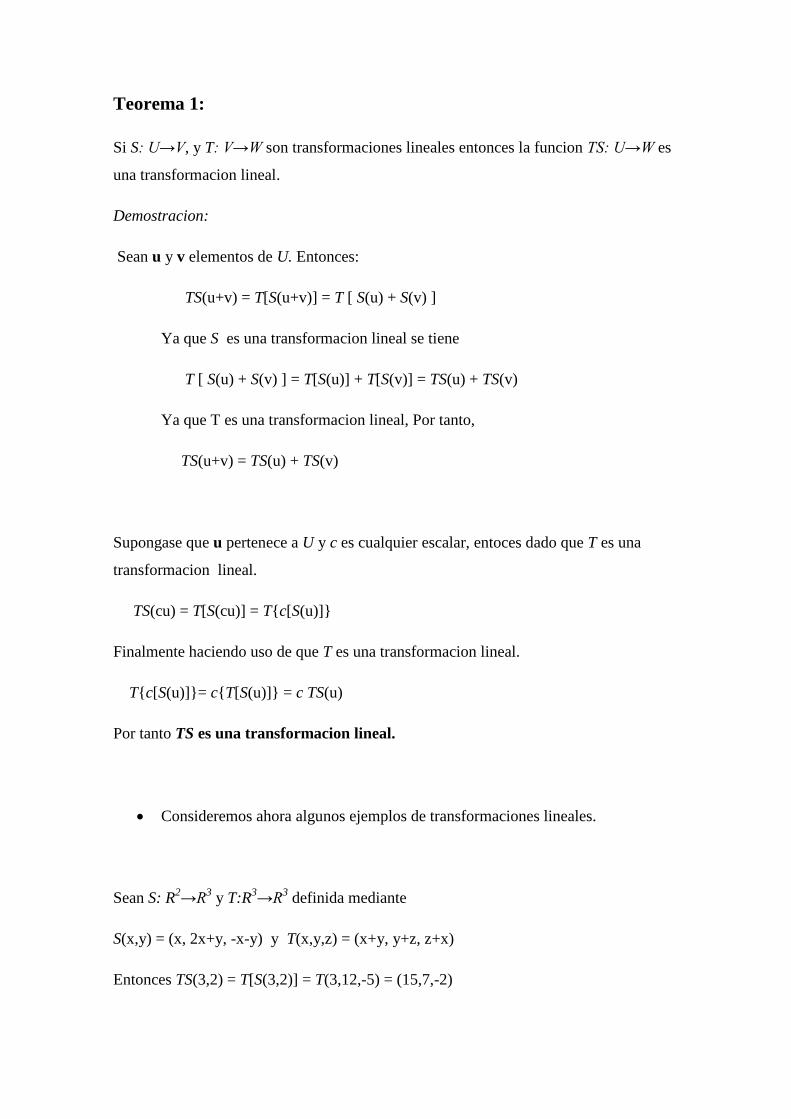
Teorema 1:
Si S: U→V, y T: V→W son transformaciones lineales entonces la funcion TS: U→W es
una transformacion lineal.
Demostracion:
Sean u y v elementos de U. Entonces:
TS(u+v) = T[S(u+v)] = T [ S(u) + S(v) ]
Ya que S es una transformacion lineal se tiene
T [ S(u) + S(v) ] = T[S(u)] + T[S(v)] = TS(u) + TS(v)
Ya que T es una transformacion lineal, Por tanto,
TS(u+v) = TS(u) + TS(v)
Supongase que u pertenece a U y c es cualquier escalar, entoces dado que T es una
transformacion lineal.
TS(cu) = T[S(cu)] = T{c[S(u)]}
Finalmente haciendo uso de que T es una transformacion lineal.
T{c[S(u)]}= c{T[S(u)]} = c TS(u)
Por tanto TS es una transformacion lineal.
Consideremos ahora algunos ejemplos de transformaciones lineales.
Sean S: R2→R
3 y T:R3→R
3 definida mediante
S(x,y) = (x, 2x+y, -x-y) y T(x,y,z) = (x+y, y+z, z+x)
Entonces TS(3,2) = T[S(3,2)] = T(3,12,-5) = (15,7,-2)

Supongase que las transformaciones lineales T:R2→R
2 y S:R2→R
2 estan dadas por
T(x,y) = (x, 2x+y) y S(x,y) = (x-y, 2y)
Determinar 2T + S y ST
Solucion: (2T+S)(x,y) = 2T(x,y) + S(x,y) = 2(x, 2x+y) + (x-y,2y)
=(2x, 4x+2y) + (x-y,2y) = (3x-y, 4x+4y)
ST(x,y)= S[T(x,y)] = S(x, 2x+y) = (-x-y, 4x+2y)
Ahora considere que T:V→W y S: W→V son transformaciones lineales tales que S
invierte la accion de T ( en el sentido de que si T(v)= w , entonces S(w)= v) y k invierte
la accion de S.
Definición 4.
Sean T:V→W una transformación lineal de un espacio vectorial V de dimensión n
hacia un espacio W de n dimensión. Una inversa de T(si existe), expresada por T-1 es la
función de W→V tal que.
T-1T = Iv TT -1= Iw
donde Iv e Iw son las transformaciones identidad V y W respectivamente.
Eemplo: La transformación cero Z: R2→R
2 no tiene inversa. Dado que
Z(0,0) = (0,0) entonces Z2(0,0) tendria que ser igual a (0,0) como a (1,1), lo cual es
imposible.
Para que exista la inversa de una transformacion lineal T:V→W, V y W deben ser de la
misma dimension. Si bien una transformacion lineal T puede no tener inversa, si existe
tal inversa es unica. Para la demostracion del Teorema 2 se requiere observar que T(u) =
v, entonces u= T-1(v)
Teorema 2
Si T: V→W es una transformación lineal y si existe T-1 tambien es una transformacion
lineal, además, si T-1 existe es unica.
Demostracion:
Sean v y w elementos de V y u= T-1(v) y n= T-1(w). De ello resulta que T(u)= v y
T(n)=w puesto que T es una transformación lineal;
T(u+n)= T(u) + T(n) = v+w
Entonces T-1(v+w) = u+n = T-1(v) + T-1(w)
Supongase ahora que v esta en W, c es cualquier escalar y u = T-1(v), entonces T(u)= v y
por tanto T(cu) = c[T(u)] = cv. Luego se tieneque T-1(cv) = cu
T-1(cv) = cu = c[T-1(v)]
La función T-1 resulta ser una transformacion lineal.
La inversa del producto de dos transformaciones lineales invertibles se comporta
precisamente del mismo modo que la inversa del producto de dos matices invertibles.
Esto es si T: V→V y S: V→V son transformaciones lineales en un espacio vectorial V,
entonces , si T-1 y S-1 existen, (TS)-1 tambien existe y
(TS)-1= S-1T-1

Hay dos subespacios, el núcleo o kernel de T y la imagen de T, asociados a una transformación lineal dada. Estos espacios proporcionan información útil acerca de transformaciones lineales, espacios vectoriales y matrices.
Definición 5
Sea T: V W una transformación lineal.
a. El conjunto de todos los vectores v en V tales que T (v) = 0 se llama núcleo o kernel de T, lo cual se simboliza por ker (T). De manera que ker (T) = {v en V: T(v) = 0 }
b. El conjunto de todos los elementos w de W tales que existe por lo menos un elemento v en V de modo que T (v) = w, se llama imagen de T, denotada por imag (T). Específicamente,
Imag(T) = {w en W: T(v) = w para algún v en V}
V V W
W
T
T
Algunos ejemplos referentes al kernel y la imagen de una transformación lineal incrementaran la comprensión de estos conceptos.
Ejemplo 8
Considérese la trasformación identidad I: V V. Se tiene que I (v) = v para toda v en V. Por lo tanto, el único elemento u tal que I(u) = 0 es u = 0. Entonces ker (I) = {0}. Además, puesto que I (v) = v, imag (I) = V.
Ejemplo 9
0
Ker
(T)
R (T)

Considérese la trasformación cero T: V W. Se tiene que T (v) = 0 para toda v en V. Por lo tanto, ker (T) = V. además, el único elemento de W que es imagen de elementos de V, es 0. Por lo tanto imag (T) = {0}
Ejemplo 10 Considérese la trasformación lineal T: R2 R3 definida por
T [(x, y)] = (2x, 3x + y, 0)
a. Hallar ker(T) b. Encontrar imag (T).
Solución.
a. Para determinar ker (T) se requiere encontrar todos los vectores (x, y) tales que
T [(x, y)] = (2x, 3x + y, 0) = (0, 0, 0)
Esto es, todos los x y y tales que: 2x = 0 3x + y = 0 La única solución de este sistema de ecuaciones es x = y = 0. Por lo tanto, ker (T) = {0}. b. Para determinar imag (T), se deben encontrar todos los posibles vectores (a, b, c) tales que T [(x, y)] = (a, b, c) = (2x, 3x + y, 0) para algún (x, y) en R2. Hágase
T [(x, y)] = (2x, 3x + y, 0) = (2x, 3x, 0) + (0, y, 0)
= x (2, 3, 0) + y (0, 1, 0)
Por lo tanto, imag (T) es el conjunto de todos los vectores de R3 de la forma x(2, 3, 0) + y(0, 1, 0). Entonces imag (T) = S {(2, 3, 0), (0, 1, 0)}
Ejemplo 11 Considérese la trasformación lineal T: R3 R2 definida por
T [(x, y, z)] = (x – 2y, y + 3z)
a. Encuentre ker(T) b. Determinar imag(T)
Solución.
a. Para determinar ker(T), se resuelve T [(x, y, z)] = (x – 2y, y + 3z) = (0, 0)
Las ecuaciones x – 2y = 0 y+ 3z = 0 dan lugar a la solución general x = -6c, y = -3c, z = c. Entonces

(x, y, z) = (-6c, -3c, c) = c (-6, -3, 1) Por lo tanto ker (T) = S {(-6, -3, 1)}
b. Para obtener imag(T) se determinan todos los vectores (a, b) tales que existe un vector (x , y , z) con la propiedad de que
T [(x, y, z)] = (x – 2y, y + 3z) = (a, b) Entonces se tiene que T [(x, y, z)] = (x – 2y, y + 3z) = (x, 0) + (-2y, y) + (0, 3z) = x (1, 0) + y (-2, 1) + z (0, 3) Por lo tanto, imag (T) = S {(1, 0), (-2, 1), (0, 3)} = R2
Ejemplo 12 Determinar el núcleo de la transformación lineal T: M13
M23 definida por
T ([a b c] = [
]
Solución. Si
T ([a b c] = [
]= [
]
Entonces a + b = 0, c = 0, y a = 0. Esto implica que b = 0. Por lo tanto
Ker (T) = {[0 0 0]}.
Claramente, en el Ejemplo 11, ker (T) es un subespacio de R3 e imag (T) es un subespacio de R2. El núcleo y la imagen de una transformación lineal son siempre subespacios de sus respectivos espacios vectoriales, como lo demuestra el teorema siguiente.
Teorema 3 Sea T: V W Una transformación lineal. Entonces:
a. Ker (T) es un subespacio de V. b. Imag (T) es un subespacio de W.

Demostración.
Sea T: V W una transformación lineal. Parte (a). Se tiene que T (0) = 0. Por tanto, 0 pertenece a ker (T) Y así ker (T) no es vacío. Para demostrar que ker (T) es un subespacio de V, se debe probar que se satisfacen las dos propiedades de un subespacio.
1. Si u y v pertenecen a ker (T), entonces u + v pertenece a ker (T). Sean u y v elementos de ker (T). Entonces T (u) = 0 y T (v) = 0. Por lo que
T (u + v) = T (u) + T (v) = 0 + 0 = 0.
De ello se deduce que u y v pertenece a ker (T).
2. Si u pertenece a ker (T) y c es cualquier escalar, entonces cu pertenece a ker (T). Sea uun elemento de ker (T). Entonces T (u) = 0. Por lo tanto, para todo escalar c,
T (cu) = cT (u) = c0 = 0
Parte (b). Puesto que T (0) = 0, entonces 0 pertenece a imag (T), así que imag (T) no está vacía. Sean w1 y w2 elementos de imag (T). Entonces existen v1 y v2 en V tales que
T (v1) = w1 y T (v2) = w2. Por consiguiente,
T (v1 + v2) = T (v1) + T (v2) = w1 + w2
Entonces w1 + w2 pertenece a imag (T).
Supóngase ahora que w pertenece a imag (T) y que c es cualquier escalar. Entonces existe un vector v en V tal que T (v) = w. Luego se tiene que
T (cv) = cT (v) = cw
Y de esta manera cw pertenece a imag (T). El conjunto imag (T) no es vacío, ya que 0 pertenece a imag (T). Por lo tanto, imag (T) es un subespacio de W.

GUÍA DE EJERCICIOS SOBRE ALGEBRA DE LAS TRANSFORMACIONES LINEALES
Dadas las transformaciones lineales T: R2 → R
2 y S: R2 →R
2 definidas por T[(x,y)] = (3x + y, y) y S[(x,y)] = (x – y, 2x + 4y), describa las transformaciones lineales indicadas en los Ejercicios 1-6.
1. T + S 2. S – T 3. 3S + 4T 4. TS 5. T2 6. T2 - 2T + S
Dadas las transformaciones lineales T: R3 → R
3 y S: R3 →R
3 definidas por T[(x,y,z)] = (3x + y, y – z, 2z) y S[(x,y,z)] = (x, 2x + 3y, z + 4y), describa las transformaciones lineales indicadas en los Ejercicios 7-11.
7. 2T – S 8. 3T – 5S 9. ST 10. S2 11. S2 + 2S + T
Determine el kernel o núcleo y la imagen de cada una de las transformaciones lineales de los Ejercicios 12-16.
12. T: R2 → R
2; [(x,y)] = (2x, x – y)
13. T: R2 → R
3; [(x,y)] = (x + 3y, 2x – 3y, 5x – y)
14. T: R3 → R
2; [(x,y,z)] = (x +2y, 0)
15. T: R3 → R; [(x,y,z)] = (2x + y + z, x – 4y + 2z, 4x + 5z)
16. T: M22 → M22; T(A) = A [
]
17. Pruebe que la suma de dos transformaciones lineales es conmutativa. Esto es, si T1: U →
V, T2: U → V son dos transformaciones lineales de un espacio vectorial U a un espacio vectorial V, entonces
T1 + T2 = T2 + T1
18. Sea T: U → V una transformación lineal entre dos espacios vectoriales U y V, y denótese
por 0 la transformación nula de U a V definida por 0(u) = 0 para toda u en U. Pruebe que T + 0 = T 19. Sea T: U → V una transformación lineal y – T = (- 1)T. Pruebe que T + (- T) = 0 en donde 0 es como en el ejercicio 18. 20. Sean T: U → V, S: V → W transformaciones lineales, en donde U, V, y W son espacios
vectoriales. Pruebe que: c(ST) = (cS) = S(cT) Para todo escalar c.
21. T1: U → V, T2: U → V, S: V → W transformaciones lineales ,en donde U, V y W son
espacios vectoriales . Pruebe que S(T1 + T2) = ST1 + ST2