Enhancement of Transient Stability Limit and Voltage Regulation with Dynamic Loads Using Robust...
10
Research Article Jahangir Hossain*, Apel Mahmud, Naruttam K. Roy, and Hemanshu R. Pota Enhancement of Transient Stability Limit and Voltage Regulation with Dynamic Loads Using Robust Excitation Control Abstract: In stressed power systems with large induction machine component, there exist undamped electrome- chanical modes and unstable monotonic voltage modes. This article proposes a sequential design of an excitation controller and a power system stabiliser (PSS) to stabilise the system. The operating region, with induction machines in stressed power systems, is often not cap- tured using a linearisation around an operating point, and to alleviate this situation a robust controller is designed which guarantees stable operation in a large region of operation. A minimax linear quadratic Gaussian design is used for the design of the supplemen- tary control to automatic voltage regulators, and a classi- cal PSS structure is used to damp electromechanical oscillations. The novelty of this work is in proposing a method to capture the unmodelled nonlinear dynamics as uncertainty in the design of the robust controller. Tight bounds on the uncertainty are obtained using this method which enables high-performance controllers. An IEEE benchmark test system has been used to demon- strate the performance of the designed controller. Keywords: voltage regulation, transient stability, robust control, uncertainty, nonlinearity *Corresponding author: Jahangir Hossain, Griffith University, Gold Coast, QLD 4222, Australia, E-mail: [email protected] Apel Mahmud, The University of Melbourne, Melbourne, VIC, Australia, E-mail: [email protected] Naruttam K. Roy: E-mail: [email protected], Hemanshu R. Pota: E-mail: [email protected], UNSW@ADFA, Canberra, ACT, Australia 1 Introduction Modern power systems are operating increasingly closer to their control and operational limits due to the increase in demand for electric energy coupled with economical, technical, and environmental restrictions on their expan- sion. Demands for large power transactions in an open- access market can severely stress a system to the edge of its stability limits. When a stressed power system is sub- jected to small or large disturbances, it exhibits complex dynamic behaviours [1], which results in different forms of system instability [2], among which transient and dynamic voltage stabilities are very important considera- tions to provide reliable and efficient operation of power systems. Transient instability, which is triggered by large distur- bances [3], is still one of the main stability issues of power systems. Power oscillations of small magnitude and low frequency often persist for long periods of time which limits the power transfer capability of the system. The use of power system stabilisers (PSSs) has become increasingly important to provide improved stabilisation of the system. The PSS has been designed to add damping to the generator rotor oscil- lations; however, the voltage modes cannot be stabilised using a PSS [4]. Generators equipped with a PSS and an automatic voltage regulator (AVR) can enhance voltage as well as transient stability of power systems. North American Reliability Council and Western Electric Coordinating Council are ruling that machines rated more than 35 MV A or group of machines equal to or more than 75 MV A con- nected to the transmission grid through one transformer must operate in voltage regulating mode and be equipped with PSSs to improve the transient stability of the system [5]. The reactive power of a system is tightly related to bus voltages throughout the network, and hence it has a significant effect on dynamic voltage stability and col- lapses. Recently, the problem in voltage instability is likely to increase because of the growing use of dynamic motor loads for air conditioning, heat pumps, refrigera- tion, and so forth, which consume a large amount of reactive power after a disturbance [6]. The disturbances in power systems may not only cause the loss of synchro- nisation but also result in short-term voltage dips and sags. This requires the robust controller to have the doi 10.1515/ijeeps-2013-0037 International Journal of Emerging Electric Power Systems 2013; 14(6): 561–570 Brought to you by | Griffith University Lib Authenticated | [email protected] author's copy Download Date | 1/20/14 3:09 AM
-
Upload
independent -
Category
Documents
-
view
3 -
download
0
Transcript of Enhancement of Transient Stability Limit and Voltage Regulation with Dynamic Loads Using Robust...

Research Article
Jahangir Hossain*, Apel Mahmud, Naruttam K. Roy, and Hemanshu R. Pota
Enhancement of Transient Stability Limit andVoltage Regulation with Dynamic Loads UsingRobust Excitation Control
Abstract: In stressed power systems with large inductionmachine component, there exist undamped electrome-chanical modes and unstable monotonic voltage modes.This article proposes a sequential design of an excitationcontroller and a power system stabiliser (PSS) to stabilisethe system. The operating region, with inductionmachines in stressed power systems, is often not cap-tured using a linearisation around an operating point,and to alleviate this situation a robust controller isdesigned which guarantees stable operation in a largeregion of operation. A minimax linear quadraticGaussian design is used for the design of the supplemen-tary control to automatic voltage regulators, and a classi-cal PSS structure is used to damp electromechanicaloscillations. The novelty of this work is in proposing amethod to capture the unmodelled nonlinear dynamicsas uncertainty in the design of the robust controller. Tightbounds on the uncertainty are obtained using thismethod which enables high-performance controllers. AnIEEE benchmark test system has been used to demon-strate the performance of the designed controller.
Keywords: voltage regulation, transient stability, robustcontrol, uncertainty, nonlinearity
*Corresponding author: Jahangir Hossain, Griffith University, GoldCoast, QLD 4222, Australia, E-mail: [email protected] Mahmud, The University of Melbourne, Melbourne, VIC,Australia, E-mail: [email protected] K. Roy: E-mail: [email protected], Hemanshu R. Pota:E-mail: [email protected], UNSW@ADFA, Canberra, ACT, Australia
1 Introduction
Modern power systems are operating increasingly closerto their control and operational limits due to the increasein demand for electric energy coupled with economical,
technical, and environmental restrictions on their expan-sion. Demands for large power transactions in an open-access market can severely stress a system to the edge ofits stability limits. When a stressed power system is sub-jected to small or large disturbances, it exhibits complexdynamic behaviours [1], which results in different formsof system instability [2], among which transient anddynamic voltage stabilities are very important considera-tions to provide reliable and efficient operation of powersystems.
Transient instability, which is triggered by large distur-bances [3], is still one of the main stability issues of powersystems. Power oscillations of small magnitude and lowfrequency often persist for long periods of time which limitsthe power transfer capability of the system. The use of powersystem stabilisers (PSSs) has become increasingly importantto provide improved stabilisation of the system. The PSS hasbeen designed to add damping to the generator rotor oscil-lations; however, the voltage modes cannot be stabilisedusing a PSS [4]. Generators equipped with a PSS and anautomatic voltage regulator (AVR) can enhance voltage aswell as transient stability of power systems. North AmericanReliability Council and Western Electric CoordinatingCouncil are ruling that machines rated more than 35 MV Aor group of machines equal to or more than 75 MV A con-nected to the transmission grid through one transformermust operate in voltage regulating mode and be equippedwith PSSs to improve the transient stability of the system [5].
The reactive power of a system is tightly related tobus voltages throughout the network, and hence it has asignificant effect on dynamic voltage stability and col-lapses. Recently, the problem in voltage instability islikely to increase because of the growing use of dynamicmotor loads for air conditioning, heat pumps, refrigera-tion, and so forth, which consume a large amount ofreactive power after a disturbance [6]. The disturbancesin power systems may not only cause the loss of synchro-nisation but also result in short-term voltage dips andsags. This requires the robust controller to have the
doi 10.1515/ijeeps-2013-0037 International Journal of Emerging Electric Power Systems 2013; 14(6): 561–570
Brought to you by | Griffith University LibAuthenticated | [email protected] author's copy
Download Date | 1/20/14 3:09 AM

ability to suppress the potential instability due to poorlydamped power angle oscillations that can be dangerousfor the system stability and to compensate the voltagedips and sags that can damage both utility and customerequipments.
Power systems can be stabilised either by includingflexible alternating current transmission systems deviceswhich control the power flow and regulate the voltagelevel or by controlling the excitation of synchronousgenerators [7]. As the use of excitation controller is eco-nomical, this work is mainly focused on this approach.To improve overall performances of the system, the coor-dination between PSSs and excitation controllers hasbeen reported in the literature [8–11]. Some of thesemethods are based on the complex nonlinear simulation,and the others are based on the linearised power systemmodel. Excitation controllers designed based on approxi-mately linearised models depend on a given set of oper-ating conditions and, therefore, may not work properlywhen the operating conditions change [12].
As the real electric power systems have been experi-encing a dramatic change, the application of advancedcontrol techniques in power systems has attracted a greatattention in recent years to ensure secure system opera-tion under wide operating ranges [8]. A coordinated AVRand PSS control has been presented for a single machineinfinite bus (SIMB) system which allows coordinatedtrade-off of voltage regulation and damping enhance-ments [10]. A robust linear controller has been proposedto solve the problem of control action coordination due tovariations in the generator terminal voltage and electricpower [13]. A unified approach for a voltage regulator andPSS design based on predictive control in the s-domain ispresented in Ref. [11].
Since the transient stability and voltage regulation areascribed to different causes, some recent proposed scenar-ios apply a switching strategy of two different kinds ofcontroller to cover different behaviours of system opera-tion during transient and post-transient periods [14, 15].The performance of these schemes essentially dependsupon the selection of switching time. Moreover, the useof different control surfaces through a highly nonlinearstructure increases the complexity of the designed control-lers. Feedback linearisation schemes are also widely usedin the design of robust controllers for power systems whichlinearise nonlinear power system models into a linear one.A feedback linearising controller (FBLC) is used to design acontroller for a synchronous generator connected to aninfinite bus in Ref. [16]. The direct feedback linearisationtheory is easier to understand for power engineers, but ituses rotor angle and accelerating power as feedback
signals and some additional sensors and differentiatorsare essential to measure these signals. Another type ofFBLC to damp electromechanical oscillations in powersystems is proposed in Ref. [17], but this is achieved atthe expense of reducing the voltage regulation ability ofthe excitation system.
In Ref. [18], it is indicated that the implementation of anexciter control based on the FBLC theory requires a exactparameters of the power system which is usually not welldefined in practice. Furthermore, the controllers designedthrough feedback linearisation require information of thepower system topology, and the states must be measurable.In practice, it is very difficult to measure all the states of apower system. In addition, feedback linearisation schemesuse rotor angle as an output function to cancel the inherentsystemnonlinearities. An exact FBLC is proposed in Ref. [19]for power systems with a dynamic loads where a dynamicload is connected to a SMIB system. From Ref. [19], it can beseen that the law is quite complex even for an SMIB system,and it would be more complex for a multimachine powersystem which is difficult to implement. To overcome thedifficulty associated with the state variables, an output-feedback linear quadratic Gaussian (LQG) excitation controlscheme is proposed in Ref. [20]. The LQG controller is morerealistic, because it is designed using only the measurableoutputs and the state variables estimated from them. It iswell known that the LQR controller provides good robust-ness in terms of gain margin and phase margin [21].However, LQR and LQG controllers are unable to providerobustness against uncertainties with changes in operatingconditions [22]. Thismotivates the use of robust LQG controltechniques to ensure system stability for large disturbances.
The assessment of voltage stability in power systemshas recently gained increasing attention, because voltageinstability has been responsible for several major networkcollapses [23]. In contrast to the traditionalmachine instabil-ity, which deals with the rotor dynamics, voltage instabilityis closely related to the load behaviour [24]. Different studieshave shown the importance of load representation in vol-tage stability analyses [23, 25]. Currently, although staticload models are commonly used in the power industry tomodel dynamic behaviours of reactive loads, they do notadequately do so [26]. For any systems to be effective practi-cally, the inclusion of dynamic load models is essential, butthat representation exhibits even more nonlinear beha-viours than the ones with constant impedance loads do.Therefore, dynamic load models are needed in order toanalyse the system instability and to design controllers forenhancing transient stability along with voltage regulation.
In this article, we consider the problem of designing alinear controller for a nonlinear power system model, in
562 J. Hossain et al.: Enhancement of Transient Stability Limit and Voltage Regulation
Brought to you by | Griffith University LibAuthenticated | [email protected] author's copy
Download Date | 1/20/14 3:09 AM

such a way that this linear controller provides an accep-table performance over a wider operating region, as com-pared to other conventional linear controllers. Thenonlinearities are dealt with by explicitly including theinformation about the system nonlinearities in the designformulation, using the Cauchy remainder of the Taylorseries expansion [27, 28]. The voltage controller and PSSare designed sequentially provided that the performance ofone controller is not degraded by the other controller. Thedesigned controllers significantly improve both the damp-ing of electromechanical oscillations and voltage stability.
The article is organised as follows. In Section 2, themathematical model of the power system devices underconsideration is provided. The test system descriptionand control task are presented in Section 3. Section 4describes the linearisation technique and the process forobtaining the bounds on the nonlinear terms.Performance of the proposed new control design algo-rithm is demonstrated in Section 5. Finally, conclusionsare drawn in Section 6.
2 Power system model
Under typical assumptions, the synchronous generatorcan be modelled by the following set of nonlinear differ-ential equations [29]:
_δ ¼ ωωs � ωs; ð1Þ
_ω ¼ 12H
Pm � E0qIq � Dω
h i; ð2Þ
_E0q
1T 0d0
Efd � E0q � ðXd � X0
dÞIdh i
; ð3Þ
where Efd is the equivalent emf in the exciter coil, δ is thepower angle of the generator, ω is the rotor speed withrespect to a synchronous reference, E0
q is the transientemf due to field flux linkage, ωs is the absolute value ofthe synchronous speed in radians per second, H is theinertia constant of the generator, D is the damping con-stant of the generator, T 0
do is the direct-axis open-circuittransient time constant of the generator, Xd is the syn-chronous reactance, X0
d is the transient reactance, and Idand Iq are direct and quadrature axis components ofstator current, respectively. The mechanical input powerPm to the generator is assumed to be constant.
The excitation system is a high-gain static system,and terminal voltage is measured using a transducer withfirst-order dynamic:
Efd ¼ KaðVc þ VpssÞ; _Vtr ¼ 1Tr
�Vtr þ Vt½ �; ð4Þ
where Vtr and Tr are the output and time constant of the
voltage transducer, respectively, Ka is the gain of the
exciter amplifier, Vt ¼ ðE0q � X0
dIdÞ2 þ ðX0dIqÞ2
h i12
is the
generator terminal voltage, and Vc is the input to theexciter (output of the designed controller).
The output-feedback controller, shown in Figure 1, isrepresented as:
_̂xc ¼ Acx̂cðtÞ þ BcðVref � VtrÞ; Vc ¼ Ccx̂cðtÞ;
where Ac, Bc, and Cc are the appropriate matrices of thecontroller.
A third-order model of an induction motor as presentedin Ref. [4] has been used in this article. However, theseequations represent the induction machine in its owndirect and quadrature axes, which are different from thed- and q-axes of the generator. A transformation is usedto represent both dynamic elements with respect to thesame reference frame as discussed in Ref. [4]. Then, themodified third-order induction machine model can berewritten as:
ðVd þ jVqÞ ¼ �ðRs þ jX0ÞðIdm þ jIqmÞ þ jE0qm; ð5Þ
_s ¼ 12Hm
Tm � E0mIqm
� �; ð6Þ
_E0m ¼ � 1
T 0dom
E0m þ ðX � X0ÞIdm
� �; ð7Þ
_δm ¼ sωs � ωs � X � X0
T 0domE
0mIqm: ð8Þ
The block diagram of the proposed controller is given inFigure 1. Speed and the terminal voltage of generator areused as the feedback signals. In this article, a coordinatedPSS and voltage stability controller will be designed assuggested by the auxiliary input Vs in Figure 1.
Vref+ Controller
Vc +Vs
ExciterEfd
Plant ωVt
Transducer
−Vtr
PSS
Figure 1 Excitation controller
J. Hossain et al.: Enhancement of Transient Stability Limit and Voltage Regulation 563
Brought to you by | Griffith University LibAuthenticated | [email protected] author's copy
Download Date | 1/20/14 3:09 AM

3 Test system and control task
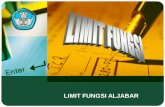
One-line diagram of the 10 Machine New England systemis shown in Figure 2. This system has been modified byadding a 25 kW induction motor at the terminal of each
generator, and the modified system is used as a testsystem in this article. Generator 1 represents the aggrega-tion of a large number of generators. The generation andtotal load in this system are 6,193.41 MW and 6,150.5 MW,respectively. The load in this article is modelled as (i)
50% induction motor load, (ii) 5% transformer excitingcurrent, (iii) 10% constant power, and (iv) 35% constantimpedance load.
The test system in this article, with 50% dynamicload, has one unstable mode with a real eigenvalue at
0.45 and an undamped mode with eigenvalue of� 0:0091� j3:1. Most significant normalized participa-tion vectors for these two modes are shown in Table 1.The mode � 0:0091� j3:1 is an electromechanical modewith a damping ratio of 0.0029. The other mode with the
eigenvalue 0.45 is a monotonic mode associated with therotor electrical dynamics of generators and inductionmotors. This monotonic mode is introduced due to thereplacement of constant impedance loads with inductionmotors. In this article, attention is directed to the design
of robust control for these critical modes.
The objective in the PSS design is to increase damping ofthe electromechanical mode by adding an auxiliary sig-nal to the AVR. PSSs are designed to have very low gainsin the frequency range outside of a narrow band centredaround the resonant mode frequency. This necessitatesthe design of controllers to maintain system stability forother unstable or lightly damped modes. In this article,PSS is designed for G2 and AVR for G4 using locallymeasured signal.
4 Linearisation and uncertaintymodelling
Conventionally, a linear controller is designed by neglect-ing the higher order terms of the Taylor series around anequilibrium point. In this article, we propose the use of alinearisation scheme which retains the contributions of thehigher order terms in the form of the Cauchy remainder.
G2
G3
G4 G5G7
IM2
IM1
IM3 IM4IM5
IM7
G6
G9
G8
G10
G1
7
5
4
3
2
1
30
3725
18 17
26
2738
2829
24
16
15
14
12
10
32
34 33
19
20
23
22
35
36
21
39
8
9
6
31 11
IM6
IM9
IM8
IM10
Figure 2 Test system
Table 1 Critical modes and participation factors
Modes Participation factors
� 0:0091� j3:1 Δω2 ¼ 1 Δδ2 ¼ 0:99 Δω3 ¼ 0:260.45 ΔE 0
q4 ¼ 1 ΔE 0qr4 ¼ 0:78 ΔE 0
dr4¼ 0:71
564 J. Hossain et al.: Enhancement of Transient Stability Limit and Voltage Regulation
Brought to you by | Griffith University LibAuthenticated | [email protected] author's copy
Download Date | 1/20/14 3:09 AM

The reformulation proposed in this article usingCauchy remainder allows us to represent the nonlinearpower system models as:
Δ _xðtÞ ¼ AΔxðtÞ þ B1ΔuðtÞ þ B2�ðtÞ; ð9Þ
yðtÞ ¼ C2ΔxðtÞ þ D2�ðtÞÞ; ð10Þ
ζ ðtÞ ¼ C1ΔxðtÞ; ð11Þ
where Δx is the state vector, Δu is the control input, yðtÞ isthe measured output, � is known as the uncertaintyinput, and ζ is known as the uncertainty output. Theprocedure for obtaining the matrices in eqs (9)–(11) andbounding uncertainty has been described in the rest of
this section.Let ðx0; u0Þ be an arbitrary point in the control space;
using the mean-value theorem, the test system dynamicscan be rewritten as follows:
_x ¼ f ðx0; u0Þ þ Lðx � x0Þ þMðu� u0Þ; ð12Þ
where
L ¼ @f1@x
����x¼x�1
u ¼ u�1
; . . . ;@f8@x
����x¼x�8
u ¼ u�8
264
375T
;
M ¼ @f1@u
����x¼x�1
u ¼ u�1
; . . . ;@f8@u
����x¼x�8
u ¼ u�8
2664
3775T
;
f ¼ f1; . . . ; f8½ �T ;
where ðx�p; u�pÞ, p ¼ 1; . . . ; 7, denote points lying in theline segment connecting ðx; uÞ and ðx0; u0Þ, and f denotesthe vector function on the right-hand side of the vectordifferential equations.
Letting ðx0; u0Þ be the equilibrium point and defining
Δx ¼Δ x � x0 and Δu ¼Δ u� u0, it is possible to rewrite eq.(12) as follows
Δ _x ¼ _x � _x0;
¼ AΔx þ L� Að ÞΔx þ M � B1ð ÞΔuþ B1Δu;ð13Þ
where A ¼ @f@x
���x¼x0 u ¼ u0
, B1 ¼ @f@u
���x¼x0 u ¼ u0
. Eq. (13) is
linear with respect to the control vector. Sincex�p; p ¼ 1; . . . ; 7, are not known, it is difficult to obtain
the exact value of ðL� AÞ, but it is possible to obtain abound on k ðL� AÞ k .
The system (13) is of the form which allows for anapplication of the minimax control design techniqueas presented in Ref. [30]. To apply this technique, werewrite system (13) in terms of the block diagram shownin Figure 3.
In this figure, we introduce a fictitious signal � such that
L� Að ÞΔx ¼ B2�ðtÞ; ð14Þ
where
B2 ¼ diag 0;Xd � X0
d
T 0do
;12H
;1Tr
;Xs � X0
s
T 0dom
;1
2Hm;Xs � X0
s
T 0dom
� �;
ð15Þ
and
� ¼ ~fðtÞ~C1Δx: ð16Þ
Matrix ~C1 is chosen such that
~C1 ¼0 0 1 0 0 0 00 0 0 0 1 0 00 0 0 0 0 1 00 0 0 0 0 0 1
2664
3775;
L� Að ÞΔx ¼ B2~fðtÞ~C1Δx: ð17Þ
The expressions for obtaining ~fðtÞ can be determined inthe same way as in Ref. [28]. The system can now bewritten as
Δ _x ¼ AΔx þ B1Δuþ B2�ðtÞ: ð18Þ
In general, x�p; p ¼ 1; . . . ; 7, are not known beforehand, itis difficult to obtain the exact value of ðL� AÞ, but it ispossible to obtain a bound on fðtÞ shown in Figure 3.
W
Vs
Vc
Δω
Φ
ΔVt
Figure 3 Control block diagram
J. Hossain et al.: Enhancement of Transient Stability Limit and Voltage Regulation 565
Brought to you by | Griffith University LibAuthenticated | [email protected] author's copy
Download Date | 1/20/14 3:09 AM

Next, we introduce a scaling parameter α and write
C1 ¼ ffiffiffiα
p ~C1, where α scales the magnitude of the uncertainoutput
ζ ¼ ffiffiffiα
p ~C1Δx�
: ð19Þ
We write fðtÞ ¼ 1ffiffiα
p ~fðtÞh i
. The value of α is chosen such
that the uncertainty, fðtÞ, shown in Figure 3 satisfies,
k fðtÞ k2� 1: ð20ÞFrom this, we have
k �ðtÞ k2� α k ~C1Δx� k2 : ð21Þ
and we recover the norm bound constraints [30],
k �ðtÞ k2�k ζ ðtÞ k2 : ð22ÞCondition (22) will enable us to apply the minimax LQGcontrol design methodology to obtain a controller for the
underlying nonlinear system. Robustness properties ofthe minimax LQG controller ensure that this controllerstabilises the nonlinear system (9)–(11) for all instances oflinearisation errors.
Associated with the uncertain system (9)–(11), weconsider a cost functional J of the form
J ¼ limT!1
12T
EðT0ðΔxðtÞTRΔxðtÞ þ ΔuðtÞTGΔuðtÞÞdt;
ð23Þwhere R � 0 and G > 0, R 2 Rn�n;G 2 Rm�m and E is theexpectation operator.
The quadratic cost (23) is particularly suited to thedesign of an excitation controller for the power system.Every generator has an over-excitation limiter which lim-its the field voltage based on time integral of the voltage.This means that one can apply large voltages as long asthey are for short duration. Thus, the quadratic costoptimisation is much more suitable in this situation ascompared to H1-norm based designs.
The minimax optimal control finds the controllerwhich minimises J over all admissible uncertainties. Thecost function J satisfies the following relationship [31]:
supk�k2�kζk2
Jðu�Þ � infτVτ ; ð24Þ
where Vτ is given by
Vτ ¼ 12trY1Rτ þ ðY1CT
2 þ B2DT2 ÞðD2DT
2 Þ�1ðC2Y1 þ D2BT2 Þ
X1 I � 1τY1X1
� ��1�;
ð25Þ
τ is a free parameter and the matrices X1 and Y1 are thesolutions to the following pair of parameter dependentalgebraic Riccati equations [31]:
ðA� B2DT2 ðD2DT
2 Þ�1C2ÞY1 þ Y1ðA� B2DT2 ðD2DT
2 Þ�1C2ÞT
� Y1ðCT2 ðD2DT
2 Þ�1C2 � 1τRτÞY1 þ B2ðI � DT
2 ðD2DT2 Þ�1D2ÞBT
2 ¼ 0;
ð26Þ
and
X1ðA� B1G�1τ γTτ þ ðA� B1G�1
τ γTτ ÞX1
þ ðRτ � γτG�1τ γTτ Þ � X1ðB1G�1
τ BT1 � 1
τB2BT
2 ÞX1 ¼ 0:ð27Þ
The solutions are required to satisfy the following condi-
tions: Y1 > 0, X1 > 0, the spectral radius of the matrix
X1Y1 is ρðX1Y1Þ < τ, Rτ � γTτ G�1τ γτ � 0, Rτ ¼ Rþ τCT
1 C1,
Gτ ¼ Gþ τDT1 D1, and γτ ¼ τCT
1 D1.To obtain the minimax LQG controller, the parameter
τ > 0 is chosen to minimise Vτ . A line search is carried out
to find the value of τ > 0 which attains the minimum valueof the cost function Vτ . This line search involves solvingthe Riccati equations (26) and (27) for different values of τand finding the value which gives the smallest Vτ .
The minimax LQG optimal controller is given by theequations:
_̂xc ¼ ðA� B1G�1τ γTτ Þx̂c � ðB1G�1
τ BT1 � 1
τB2BT
2 ÞX1
� �x̂c
þ I � 1τY1X1
� ��1
ðY1CT2 þ B2DT
2 Þ � ðD2DT2 Þ�1 y � ðC2 þ 1
τD2BT
2 X1Þx̂c� �
;
ð28Þ
u ¼ �G�1τ ðBT
1 X1 þ γTτ Þx̂c: ð29Þ
The output matrix for the voltage controller is defined
as C2 ¼ 0;0;0; 1;0;0;0½ �T . The theory requires thatD2D0
2 > 0 as discussed in Ref. [30]. This property isrequired by the design procedure, but it does not repre-
sent any physical characteristics of the system, so wechoose the value of D2 as small as possible. Eqs (9)–(11)provide a new representation of the power system modelwhich contains the linear part and also another part withhigher order terms. The new formulation presented in
this section is used with the minimax LQG control theoryto design the excitation controllers for the generator as inRefs [4, 30].
566 J. Hossain et al.: Enhancement of Transient Stability Limit and Voltage Regulation
Brought to you by | Griffith University LibAuthenticated | [email protected] author's copy
Download Date | 1/20/14 3:09 AM

5 Controller design andperformance evaluation
Prior to the controller design, we carry out several largedisturbance simulations to get an idea of the region ofinterest. The maximum value of fðtÞ is obtained over thisregion and not globally. If the maximum value of fðtÞ isevaluated over the entire uncertainty region, the calcula-tion burden will be very high, and it will lead to a con-servative controller. The controller is then designed asfollows:
Step 1. From the simulations of the faulted system,obtain the range of the variation of all state variable
and form a polytope Ω with corner points given byðx0p � xfpÞ and ðxfp þ x0pÞ, p ¼ 1; . . . ; 7, where xfp is the
largest variation of the pth state variable about its equili-brium value x0p . Formally, x 2 Ω if jx � x0p j � jxfp � x0p j.
Step 2. Obtain
α� ¼ maxx�p2Ω
α : jjfðtÞjj2 < 1n o
:
The process to obtain α� involves obtaining the max-
imum value of jj~fðtÞjj over the polytope Ω.
Step 3. Check if there exists a feasible controller withα ¼ α�.
Step 4. If we obtain a feasible controller in the above
step, either enlarge the polytope Ω, i.e. increase theoperating region of the controller, or if we have arrivedat the largest possible polytope then perform an optimalsearch over the scalar parameter τ to get the infimum ofcost function [4]. If there is no feasible solution with the
chosen α ¼ α�, reduce the polytope, Ω and go to Step 2.For the given power systemmodel, we are able to obtain
a feasible controller with the value of α ¼ 0:925. The con-troller is stabilising for all variations of states in the polytope
region Ω formed by corner points �δ; �ω; �E0q;�Vtr;�δm;�s; �E0
m
h i
and δ;ω;E0q;Vtr; δm; s;E
0m
h iwith the values: j�δþ δ0j ¼ 45,
jδ� δ0j ¼ 45, j�ωþ ω0j ¼ 0:375 pu, jω� ω0j ¼ 0:375 pu,
j�E0q þ E0
q0 j ¼ 0:435, jE0q � E0
q0 j ¼ 0:435, �Vtr ¼ Vtr0 þ 0:275
pu, Vtr ¼ Vtr0 � 0:275 pu, �δm ¼ δm0 þ 41:19,δm ¼ δm0 � 41:19, �s ¼ s0 þ 0:225 pu, s ¼ s0 � 0:225 pu,�E0m ¼ Em0 þ 0:25 pu, and E0
m ¼ Em0 � 0:25 pu. Although
the designed controller is not globally stabilising, we canbe confident that it will stabilise the system for mostcontingencies.
In this article, the PSS as shown in Figure 4 has beendesigned using the standard technique which uses thechange in speed Δω as the feedback variable. PSS wasdesigned subsequent to the design of voltage controller.The PSS parameters are Tw ¼ 5, KSTAB ¼ 0:43, T1 ¼ 0:25,T2 ¼ 0:02, T3 ¼ 0:0:252, and T4 ¼ 0:039.
5.1 Controller performance evaluation
As mentioned earlier, the voltage controller and PSS havebeen designed sequentially. At first, voltage controller isdesigned, and then the PSS is designed including voltagecontroller. The objective of PSS design is to damp elec-tromechanical oscillations in power systems. However,this should not be done at the expense of reducing thevoltage regulation ability of the excitation system. Usingsimulation results given below, we show that the PSSdoes not have an adverse effect on the voltage controller.
A simulation is carried out by applying a symmetricalthree phase to ground short circuit fault on the middle ofthe line 16–19. The fault is cleared after 150 ms. Figures 5and 6 show the terminal voltage and real power output ofgenerator G4 with both voltage controller plus PSS andonly the voltage controller due to the three-phase fault onthe middle of the line 16–19. Figure 5 shows that the PSSimproves the voltage response. This is due to theimproved damping of the electromechanical modes,which is also visible from Figure 6.
Responses of terminal voltage and reactive poweroutput of generator G2, when a two-line to ground fault(2LG) occurs on the middle of the line 5–6 from phase Band phase C to ground, are shown in Figures 7 and 8,respectively. From Figures 7 and 8, it can be seen that the
KSTABsTW
1 + sTW
1 + sT1
Phasecompensation
1 + sT2
1 + sT3
1 + sT4
vsΔωr
Figure 4 PSS block diagram
J. Hossain et al.: Enhancement of Transient Stability Limit and Voltage Regulation 567
Brought to you by | Griffith University LibAuthenticated | [email protected] author's copy
Download Date | 1/20/14 3:09 AM

performance of the voltage controller is not muchaffected by the PSS in stabilising the voltage andproducing reactive power output of generator. Fromthese figures, it is clear that the designed controllersalso stabilise the generators under unsymmetrical faults.
In the preceding part of the article, the voltage con-troller is designed first and then the PSS – Design A. Thisorder of the controller design is compared with the designwhere the PSS is designed first and then the voltagecontroller – Design B. The closed-loop dominant modes
are, Design A: � 0:51� j0:326 and with Design B:� 0:0091� j3:04. The closed-loop behaviour is also com-pared for a 20% increase in load at bus 20. The terminalvoltage and real power at generator G4 is shown inFigures 9 and 10. With Design B, the terminal voltagedips to ~0.75 pu, and the real power oscillates for wellover 20 s with a peak of 670 MW. The response for DesignA is well damped and both terminal voltage and realpower stay within a narrow and acceptable range. Thisresult can be explained by the fact that in Design B, the
0 2 4 6 8 10−1
0
1
2
3
4
5
6
7
Time (s)
Rea
ctiv
e po
wer
(100
X M
VA
r)
Figure 8 Reactive power output ðG2Þ for the the unsymmetricalfault in the middle of line 5–6. (Solid line voltage controller þPSS and dashed line voltage controller only)
0 2 4 6 8 100.65
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
Time (s)
Vol
tage
(pu)
Figure 5 Terminal voltage ðG4Þ for three-phase fault in the middleof line 16–19. (Solid line voltage controller þ PSS and dashed linevoltage controller only)
0 2 4 6 8 105.5
6
6.5
7
7.5
8
8.5
9
9.5
Time (s)
Vol
tage
(pu)
Figure 6 Real power output ðG4Þ for three-phase fault in the middleof line 16–19. (Solid line voltage controller þ PSS and dashed linevoltage controller only)
0 2 4 6 8 100.5
0.6
0.7
0.8
0.9
1
1.1
1.2
Time (s)
Vol
tage
(pu)
Figure 7 Terminal voltage ðG2Þ for the unsymmetrical fault in themiddle of line 5–6. (Solid line voltage controller þ PSS and dashedline voltage controller only)
568 J. Hossain et al.: Enhancement of Transient Stability Limit and Voltage Regulation
Brought to you by | Griffith University LibAuthenticated | [email protected] author's copy
Download Date | 1/20/14 3:09 AM

voltage controller changes the required phase lead to beprovided by the PSS.
The performance of the designed controllers are alsocompared with the performance of the conventional IEEEAC1A exciter and IEEEST stabiliser. Here, a simulation isperformed for a severe symmetrical three-phase fault atbus 20. The fault is cleared after 0.15 s. Figures 11 and 12show terminal voltage and angle response of the genera-tors G4 and G2, respectively. From Figures 11 and 12, wecan see that the proposed controller stabilises voltagewithin few cycles of fault occurrence and damps out thepower angle oscillations. It is clear that the proposedcontroller has a better performance in terms of settlingtime, damping, overshoot, and oscillations.
6 Conclusions
The results demonstrate that robust controller designedin this article, with a proper bounding of the uncertaintydue to unmodelled nonlinear dynamics, performs wellover a large region of operation. From this work, it canbe concluded that the conservativeness of robust controlcan be overcome with the proposed method for boundingthe unmodelled dynamics. The bounding method relieson the special dynamic behaviour of power systems
0 2 4 6 8 100.7
0.75
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
1.2
Time (s)
Vol
tage
(pu)
Figure 9 Terminal voltage ðG4Þ for 20% change in load at bus 20.(Solid line controllers with Design A and dashed line Design B)
0 5 10 15 208
10
12
14
16
18
20
22
24
Time (s)
Ang
le (º
)
Figure 12 Angle response ðG2Þ for the three-phase fault. (Solid linedesigned controllers and dashed line AC1A exciter and IEEESTstabiliser)
0 5 10 15 202.5
3
3.5
4
4.5
5
5.5
6
6.5
7
Time (s)
Rea
l pow
er (M
W X
100
)
Figure 10 Real power output ðG4Þ for 20% change in load at bus20. (Solid line controllers with Design A and dashed line Design B)
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Time (s)
Vol
tage
(pu)
Figure 11 Terminal voltage ðG4Þ for the three-phase fault. (Solidline designed controllers and dashed line AC1A exciter and IEEESTstabiliser)
J. Hossain et al.: Enhancement of Transient Stability Limit and Voltage Regulation 569
Brought to you by | Griffith University LibAuthenticated | [email protected] author's copy
Download Date | 1/20/14 3:09 AM

which favours the evolution of the dynamics about cer-tain trajectories. The quadratic objective function is agood choice to damp the poles of the closed-loop system.The chosen robust control method, minimax LQG, is ableto design high performing controllers with output
feedback which is a major consideration for practicalsystems. The computational burden in the uncertaintybounding and controller design is not of concern asdemonstrated by the design of the controller for the ten-machine New England system.
References
1. Pariz N, Shanechi HM, Vaahedi E. Explaining and validatingstressed power systems behavior using modal series. IEEETrans Power Syst 2003;18:778–85.
2. Kundur P, Paserba J, Ajjarapu V, Andersson G, Bose A,Canizares C, et al. Definition and classification of power sys-tem stability. IEEE Trans Power Syst 2004;19:1387–401.
3. Zhou X, Yi J, Song R, Yang X, Li Y, Tang H. An overview of powertransmission systems in china. Energy 2010;35:4302–12.
4. Hossain MJ, Pota HR, Ugrinovskii V, Ramos RA. Voltage modestabilisation in power systems with dynamic loads. Int JElectrical Power Energy Syst 2010;32:911–20.
5. Schaefer RC, Kim K. Power system stabilizer performance withsumming point type var/power factor controllers. InConference Record of the 2006 IEEE IAS Pulp and PaperConference, 2006:1–7.
6. Leon JA, Taylor CW. Understanding and solving short termvoltage stability problems. In IEEE Power Engineering SocietySummer Meeting, Chicago, IL, 2002:745–52.
7. Leona AE, Solsonaa JA, Figueroaa JL, Valla MI. Optimizationwith constraints for excitation control in synchronous genera-tors. Energy 2011;36:5366–73.
8. Bevrani H, Hiyama T. Stability and voltage regulation enhance-ment using an optimal gain vector. In IEEE Power EngineeringSociety General Meeting, Canada, 2006:1–6.
9. Bevrani H, Hiyama T. Robust coordinated AVR-PSS designusing H∞ static output feedback control. IEEJ Trans PowerEnergy 2007;127:70–6.
10. Lawt KT, Hill DJ, Godfrey NR. Robust co-ordinated AVR-PSSdesign. IEEE Trans Power Syst 1994;9:1218–25.
11. Saidy M. A unified approach to voltage regulator andpower system stabiliser design based on predictive control inanalogue form. Int J Electrical Power Energy Syst1997;19:103–09.
12. Cao YJ, Jiang L, Cheng SJ, Chen DD, Malik OP, Hope GS. Anonlinear variable structure stabilizer for power system stabi-lity. IEEE Trans Energy Conversion 1994;9:489–95.
13. Heniche A, Bourles H, Houry MP. A desensitized controller forvoltage regulation of power systems. IEEE Trans Power Syst1995;10:1461–5.
14. Guo Y, Hill DJ, Wang Y. Global transient stability and voltageregulation for power systems. IEEE Trans Power Syst2001;16:678–88.
15. Yadaiah N, Kumar AG, Bhattacharya JL. Fuzzy based coordi-nated controller for power system stability and voltage regu-lation. Electric Power Syst Res 2004;69:169–77.
16. Mahmud MA, Pota HR, Hossain MJ. Full-order nonlinear obser-ver-based excitation controller design for interconnected
power systems via exact linearization approach. Int J ElectricalPower Energy Syst 2012;41:54–62.
17. Ramos RA, Alberto LF, Bretas NG. Linear matrix inequalitybased controller design with feedback linearisation: applica-tion to power systems. IEE Proc Control Theory Appl2003;150:551–6.
18. Chapman JW, Ilic MD, King CA. Stabilizing a multi-machinepower system via decentralized feedback linearizing excita-tion control. IEEE Trans Power Syst 1993;8:830–8.
19. Mahmud MA, Hossain MJ, Pota HR. Nonlinear excitation controlof power systems with dynamic loads via feedback lineariza-tion. In 20th Australasian Universities Power EngineeringConference (AUPEC), 2010:1–6.
20. Seo JC, Kim TH, Park JK, Moon SI. An LQG based PSS design forcontrolling the SSR in power systems with series-compensatedlines. IEEE Trans Energy Conversion 1996;11:423–8.
21. Anderson B, Moore JB. Optimal control: linear quadratic meth-ods. USA: Prentice-Hall, 1990.
22. Ray LR. Stability robustness of uncertain LQG/LTR systems.IEEE Trans Automatic Control 1993;38:304–8.
23. Taylor CW. Power system voltage stability. New York: McGraw-Hill, 1994.
24. Vu KT, Liu CC, Taylor CW, Jimma KM. Voltage instability:mechanism and control strategies [power systems]. Proc IEEE1995;83:1442–55.
25. Overbye TJ. Effects of load modelling on analysis of powersystem voltage stability. IEEE Trans Power Syst 1994;16:329–38.
26. Li Y, Chiang H-D, Choi B-K, Chen Y-T, Lauby D-H. Load modelsfor modeling dynamic behaviors of reactive loads: evaluationand comparison. Int J Electrical Power Energy Syst2008;30:497–503.
27. Hossain MJ, Pota HR, Ugrinovskii V, Ramos RA. A novelSTATCOM control to augment LVRT capability of fixed-speedinduction generators. In 48th IEEE Conference on Decision andControl, Shanghai, China, 2009:7843–8.
28. Hossain MJ, Pota HR, Ugrinovskii V, Ramos RA. SimultaneousSTATCOM and pitch angle controls for improved LVRT capabil-ity of fixed-speed wind turbines. IEEE Trans Sustainable Energy2010;1:142–51.
29. Hossain MJ, Pota HR, Ugrinovski V. Short and long-termdynamic voltage instability. In 17th IFAC World Congress,Seoul, Korea, 2008:9392–7.
30. Ugrinovskii VA, Petersen IR. Minimax LQG control of stochasticpartially observed uncertain systems. SIAM J ControlOptimization 2001;40:1189–226.
31. Petersen IR, Ugrinovskii VA, Savkin AV. Robust control designusing H∞ methods. London: Springer, 2000.
570 J. Hossain et al.: Enhancement of Transient Stability Limit and Voltage Regulation
Brought to you by | Griffith University LibAuthenticated | [email protected] author's copy
Download Date | 1/20/14 3:09 AM