
Fast Graph Matrix Partitioning Algorithm for Solving the Water Distribution System Equations
Upload
edithcowanCategory
view
7download
0
ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 1
ELEC2400 Signals and Systems
Chapter 3: Modelling, Differential Equation
and System Properties
• Electrical Circuit and Mechanical System Modelling
• 1st Order Differential Equations
• Impulse Response
• Convolution and Properties of Convolution
• System Properties

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 2
Introduction

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 3
System
• A system is an interconnected set of components
(devices, processes, subsystems, …) with terminals or
ports through which matter, energy, information or signal
can be applied, transferred and extracted
• The block diagram representation of a system:
• Examples of a system: electrical circuit, spring, …

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 4
Electrical Circuit Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 5
Electrical Circuit Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 6
Mechanical System Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 7
Mechanical System Modelling
Translational Mass
Fm
x
• Applying Newton’s 2nd Law gives
2
2
dv d xF ma m mdt dt
where F = applied force [N]
m = mass (of object) [g]
a = acceleration [m/s2]
v= velocity [m/s]
x= displacement [m]

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 8
Mechanical System Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 9
Mechanical System Modelling
Translational Spring
• From Hooke’s Law,
F
x
k
s s s
dF dxF k x k k v
dt dt
where ks = spring coefficient [N/m]
Translational Damper
• From Newton’s Law,
where kd = fiction constant or stiffness [N-s/m]
F
b
xd d
dxF k v k
dt

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 10
Mechanical System Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 11
Mechanical System Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 12
Mechanical System Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 13
Mechanical System Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 14
Mechanical System Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 15
Mechanical System Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 16
Mechanical System Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 17
Mechanical System Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 18
Mechanical System Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 19
Mechanical System Modelling

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 20
First Order Differential Equations

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 21
First Order Differential Equations

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 22
First Order Differential Equations

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 23
First Order Differential Equations

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 24
Solutions of Differential Equations

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 25
Solutions of Differential Equations

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 26
Solutions of Differential Equations

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 27
Impulse Response
Impulse Response: Example 1

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 28
Impulse Response: Example 1
Impulse Response

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 29
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 30
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 31
Convolution
Properties of Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 32
Properties of Convolution
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 33
Properties of Convolution
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 34
Properties of Convolution
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 35
Properties of Convolution
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 36
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 37
Convolution Example: RC Circuit
Convolution
ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 38
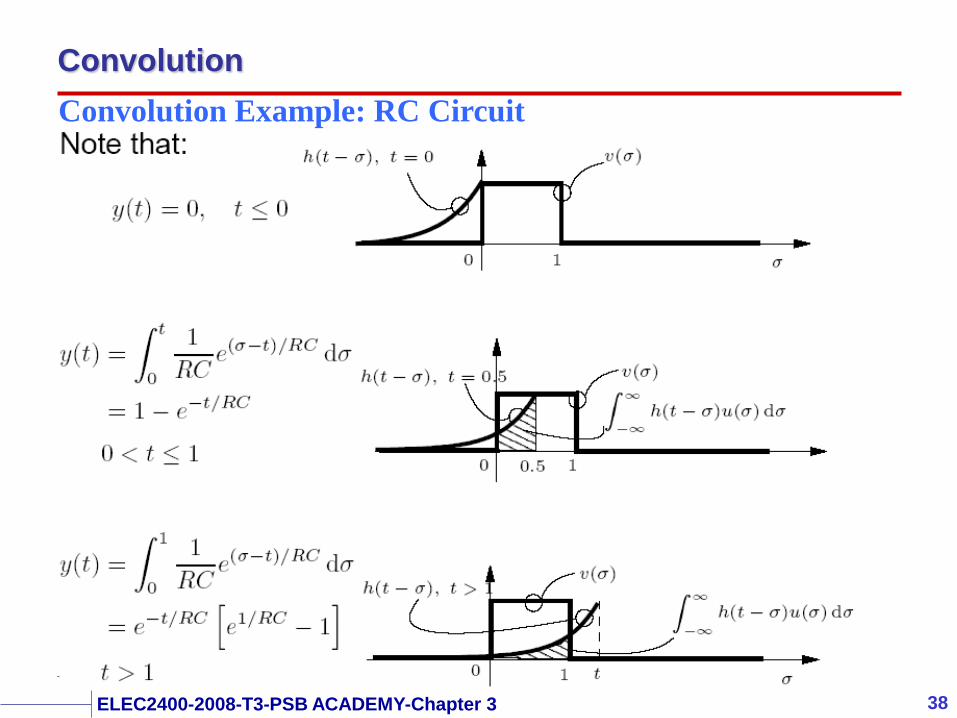
Convolution Example: RC Circuit
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 39
Convolution Example: RC Circuit
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 40
Convolution Example: RC Circuit
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 41
Convolution Example: RC Circuit
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 42
Convolution Example: RC Circuit
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 43
Convolution Example: RC Circuit
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 44
Convolution Example: Rectangular Signals
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 45
Convolution Example: Rectangular Signals
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 46
Convolution Example: Rectangular Signals
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 47
Convolution Example: Rectangular Signals
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 48
Convolution Example: Other Signals
Convolution

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 49
System Properties

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 50
System Properties

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 51
System Properties
• An example: data smoothing
• Given a batch of data: …, x[0], x[1], x[2], … which can be
smoothened using the following expression:
• Is this process causal or non-causal?
x i 1 x i x i 1
y i3

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 52
System Properties

ELEC2400-2008-T3-PSB ACADEMY-Chapter 3 53
System Properties
Copyright © 2022 FDOKUMEN




















