Computational Physics Chapter 5 Numerical Solution of Linear System of Equations
33
Computational Physics Chapter 5 Numerical Solution of Linear System of Equations Prof. Kamal Al Saleh Department of Physics University of Jordan Second Semester 2013/2014 [email protected] 5.1 Introduction Linear system of equations are associated with many problems in science and engineer- ing and many other applications. 5.2 Gaussian Elimination and Backward Substitution Consider a general linear system of equations: eq 1 : a 11 x 1 + a 12 x 2 + a 13 x 3 + a 14 x 4 = b 1 ; eq 2 : a 21 x 1 + a 22 x 2 + a 23 x 3 + a 24 x 4 = b 2 ; eq 3 : a 31 x 1 + a 32 x 2 + a 33 x 3 + a 34 x 4 = b 3 ; eq 4 : a 41 x 1 + a 42 x 2 + a 43 x 3 + a 44 x 4 = b 4 ; We use three operations to simplify the linear system given above: 1. Equation eq i can be multiplied by any nonzero constant l and the resulting equation used in place of eq i . This operation is denoted as: Hl eq i L Ø Heq i L . 2. Equation eq j can be multiplied by any constant l , added to equation eq i , and the resulting equation used in place of eq i . This operation is denoted as: Heq i + l eq j L Ø Heq i L . 3. Equation eq i and eq j can be transposed in order. This operation is denoted by: Chapter-5.nb 1
Transcript of Computational Physics Chapter 5 Numerical Solution of Linear System of Equations

Computational Physics
Chapter 5
Numerical Solution of Linear System of Equations
Prof. Kamal Al Saleh
Department of Physics
University of Jordan
Second Semester 2013/2014
5.1 Introduction
Linear system of equations are associated with many problems in science and engineer-
ing and many other applications.
5.2 Gaussian Elimination and Backward Substitution
Consider a general linear system of equations:
eq1 : a11 x1 + a12 x2 + a13 x3 + a14 x4 = b1 ;
eq2 : a21 x1 + a22 x2 + a23 x3 + a24 x4 = b2 ;
eq3 : a31 x1 + a32 x2 + a33 x3 + a34 x4 = b3 ;
eq4 : a41 x1 + a42 x2 + a43 x3 + a44 x4 = b4 ;
We use three operations to simplify the linear system given above:
1. Equation eqi can be multiplied by any nonzero constant l and the resulting equation
used in place of eqi. This operation is denoted as: Hl eqiL Ø HeqiL .
2. Equation eq j can be multiplied by any constant l , added to equation eqi, and the
resulting equation used in place of eqi. This operation is denoted as:
Heqi + l eq jL Ø HeqiL .
3. Equation eqi and eq j can be transposed in order. This operation is denoted by:
Chapter-5.nb 1

HeqiL¨ Heq jL.
By a sequence of the operations just given, a linear system can be transformed to a
more easily solved linear system with the same solution.
Example 1
Lets first consider the following example of a given system of equations to be solved
for x1, x2, x2, and x4 using the Gaussian elimination method. Given the equations as:
eq1 : x1 + x2 + ... .. + 3 x4 = 4 ;
eq2 : 2 x1 + x2 - x3 + x4 = 1 ;
eq3 : 3 x1 - x2 - x3 + 2 x4 = -3 ;
eq4 : -x1 + 2 x2 + 3 x3 - x4 = 4 ;
Mathematica Solution
Clear@"Global`∗"D
eq1 = x@1D + x@2D + 3 x@4D � 4;
eq2 = 2 x@1D + x@2D − x@3D + x@4D � 1;
eq3 = 3 x@1D − x@2D − x@3D + 2 x@4D � −3;
eq4 = −x@1D + 2 x@2D + 3 x@3D − x@4D � 4;
sol = Solve@8eq1, eq2, eq3, eq4<,
8x@1D, x@2D, x@3D, x@4D<D êê Flatten
sol2 = NSolve@8eq1, eq2, eq3, eq4<,
8x@1D, x@2D, x@3D, x@4D<D
x@4D = x@4D ê. sol;
Print@"x@4D = ", x@4DD
8x@1D → −1, x@2D → 2, x@3D → 0, x@4D → 1<
88x@1D → −1., x@2D → 2.,
x@3D → −1.29526×10−16
, x@4D → 1.<<
x@4D = 1
Chapter-5.nb 2
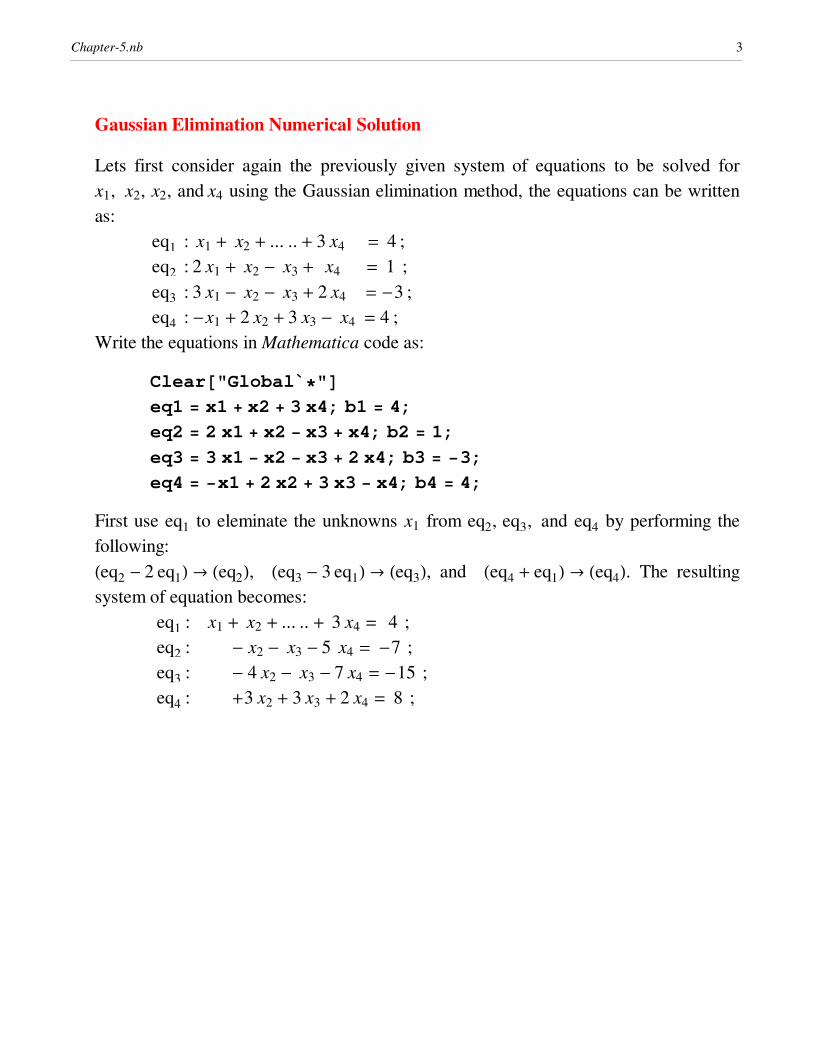
Gaussian Elimination Numerical Solution
Lets first consider again the previously given system of equations to be solved for
x1, x2, x2, and x4 using the Gaussian elimination method, the equations can be written
as:
eq1 : x1 + x2 + ... .. + 3 x4 = 4 ;
eq2 : 2 x1 + x2 - x3 + x4 = 1 ;
eq3 : 3 x1 - x2 - x3 + 2 x4 = -3 ;
eq4 : -x1 + 2 x2 + 3 x3 - x4 = 4 ;
Write the equations in Mathematica code as:
Clear@"Global`∗"D
eq1 = x1 + x2 + 3 x4; b1 = 4;
eq2 = 2 x1 + x2 − x3 + x4; b2 = 1;
eq3 = 3 x1 − x2 − x3 + 2 x4; b3 = −3;
eq4 = −x1 + 2 x2 + 3 x3 − x4; b4 = 4;
First use eq1 to eleminate the unknowns x1 from eq2, eq3, and eq4 by performing the
following:
Heq2 - 2 eq1L Ø Heq2L, Heq3 - 3 eq1L Ø Heq3L, and Heq4 + eq1L Ø Heq4L. The resulting
system of equation becomes:
eq1 : x1 + x2 + ... .. + 3 x4 = 4 ;
eq2 : - x2 - x3 - 5 x4 = -7 ;
eq3 : - 4 x2 - x3 - 7 x4 = -15 ;
eq4 : +3 x2 + 3 x3 + 2 x4 = 8 ;
Chapter-5.nb 3

8eq2 = Heq2 − 2 eq1L êê Expand,
b2 = Hb2 − 2 b1L, eq3 = Heq3 − 3 eq1L êê Expand,
b3 = b3 − 3 b1, eq4 = Heq4 + eq1L, b4 = b4 + b1<;
eq1 � b1
eq2 � b2
eq3 � b3
eq4 � b4
x1 + x2 + 3 x4 � 4
−x2 − x3 − 5 x4 � −7
−4 x2 − x3 − 7 x4 � −15
3 x2 + 3 x3 + 2 x4 � 8
In the new system of equations, eq2 is used to eliminate x2 from eq3 and eq4 , by
performing the following:
Heq3 - 4 eq2L Ø Heq3L, and Heq4 + 3 eq2L Ø Heq4L. The resulting system of equation
becomes:
eq1 : x1 + x2 + ... .. + 3 x4 = 4 ;
eq2 : - x2 - x3 - 5 x4 = -7 ;
eq3 : +3 x3 + 13 x4 = 13 ;
eq4 : -13 x4 = -13 ;
Chapter-5.nb 4

8eq3 = Heq3 − 4 eq2L êê Expand, b3 = Hb3 − 4 b2L,
eq4 = Heq4 + 3 eq2L êê Expand, b4 = b4 + 3 b2<;
eq1 � b1
eq2 � b2
eq3 � b3
eq4 � b4
x1 + x2 + 3 x4 � 4
−x2 − x3 − 5 x4 � −7
3 x3 + 13 x4 � 13
−13 x4 � −13
The new system of equations is now in triangular ( or reduced ) form and can be
solved for the unknowns by a backward-substitution process. Noting that eq4
implies x4 = 1, eq3 can be solved for x3 to give:
x3 =1ÅÅÅÅ3 H13 - 13 x4L = 1ÅÅÅÅ
3 H13 - 13L = 0.
Continuing to solve eq2 to give:
x2 = H7 - 5 x4 - x3L = H7 - 5 - 0L = 2.
and eq1 gives:
x1 = 4 - 3 x4 - x2 = 4 - 3 - 2 = -1.
The solution to the set of equations is: x1 = -1, x2 = 2, x3 = 0, and x4 = 1.
sol1 = Solve@eq1 � b1, x1D êê Flatten;
sol2 = Solve@eq2 � b2, x2D êê Flatten;
sol3 = Solve@eq3 � b3, x3D êê Flatten;
sol4 = Solve@eq4 � b4, x4D êê Flatten;
Chapter-5.nb 5

x1 = x1 ê. sol1; x2 = x2 ê. sol2;
x3 = x3 ê. sol3; x4 = x4 ê. sol4;
8x1, x2, x3, x4<
Print@"x1 = ", x1, " ; ", " x2 = ", x2,
" ; ", " x3 = ", x3, " ;", " x4 = ", x4D
8−1, 2, 0, 1<
x1 = −1 ; x2 = 2 ; x3 = 0 ; x4 = 1
When performing the calculations of this example we did not need to write out the full
equations at each step or to carry the variables x1, x2, x3, and x4 through the calcula-
tions, since they always remained in the same column. The only variation from system
to system occurred in the coefficients of the unknowns and in the values on the right-
side of the equations. For this reason, a linear system is often replaced by a matrix,
which contains all the information about the system that is necessary to determine its
solution, but in a compact form. That is to say: an n by m matrix is a rectangular array
of elements with n rows and m columns in which not only is the value of an element
important, but also its position in the array.
The General Matrix Notations
The notation for the näm (n by m) augmented matrix is a rectangular array of elements
with n rows and m columns in which not only is the value of an element important, but
also its position in the array. Consider the following general linear system of equations:
eq1 = a11 x1 + a12 x2 + a13 x3 == b1
eq2 = a21 x1 + a22 x2 + a23 x3 == b2
eq3 = a31 x1 + a32 x2 + a33 x3 == b3
these equations can be represented in matrix of the coefficient A, and a column matrix
of the constants b, expressed as:
A =
i
kjjjjjj
a11 a12 a13
a21 a22 a23
a31 a32 a33
y
{zzzzzz and b =
i
kjjjjjj
b1
b2
b3
y
{zzzzzz
Chapter-5.nb 6

or these two matrices can be combined in what so called the augmented matrix repre-
sented as:
@A, bD =i
kjjjjjj
a11 a12 a13 b1
a21 a22 a23 b2
a31 a32 a33 b3
y
{zzzzzz
In general an n by (n+1) matrix can be used to represent the following linear system of
equations:
a11 x1 + a12 x2 + ... ... + a1 n xn = b1 = a1,n+1
a21 x1 + a22 x2 + ... ....+a2 n xn = b2 = a2,n+1
a31 x1 + a32 x2 + ... ....+a3 n xn = b3 = a3,n+1
. . . .
. . . .
an,1 x1 + an,2 x2 + ... ....+an,n xn = bn = an,n+1
where the augmented matrix for these equations is represented as:
@A, bD = Aè=
i
k
jjjjjjjjjjjjjjjj
a11 a12 . . a1 n a1,n+1
a21 a22 . . a23 a2,n+1
. . . . . .
. . . . . .
an1 an2 . . an n an,n+1
y
{
zzzzzzzzzzzzzzzz
Provided that a11 ∫ 0, an reduction operation corresponding to Ieqi -ai,1ÅÅÅÅÅÅÅÅa1,1
eq1M Ø eqi
are performed for each row i = 2, 3, ... n to eliminate the coefficient of x1 in each of
these rows. In general, the reduction operation follow a sequential procedure as: for
i = j + 1, ... .., n and for j = 1, 2, ... n - 1 , provided that a j, j ∫ 0, perform the row
reduction operations I eqi -ai, jÅÅÅÅÅÅÅÅa j, j
eq j MØ eqi. The resulting matrix is :
Chapter-5.nb 7

Aè=
i
k
jjjjjjjjjjjjjjj
a11 a12 . . a1 n a1 n+1
0 a22 . . a23 a2 n+1
. . . . . .
. . . . . .
0 0 . . an n an n+1
y
{
zzzzzzzzzzzzzzz
This is called the upper triangular matrix U. The lower triangular matrix L has all zero
elements above
the major diagonal. This reduced matrix corresponds to following linear equations :
a11 x1 + a12 x2 + ... ... ... + a1,n = a1,n+1
a22 x2 + ... ... ... + a2,n = a2,n+1
... ... ... an, n = an,n+1
Solving the nth equation for xn we need the back substitution in the last n'th equation
thus:
xn =an,n+1ÅÅÅÅÅÅÅÅÅÅÅÅÅan n
Solving for the (n-1)st equation for xn-1 and using the calculated xn yields :
xn-1 =an-1,n+1-an-1,n xnÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
an-1,n-1
and counting this process backward, we obtain for each i = n - 1, n - 2, ... .. 2, 1 ,
xi =ai,n+1-ai,n xn-ai,n-1 xn-1 -........-ai,i+1 xi+1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
ai,i
and therefore, generally our algorithm becomes:
xi =ikjjai,n+1 - ⁄
j=i+1
n
ai, j x jy{zzì ai,i
i = n, n - 1, n - 2, ...., 2, 1 .
Chapter-5.nb 8

Consider the following Augmented matrix corresponding to linear equations.
a =
i
k
jjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
a1,1 a1,2 Ñ Ñ a1, j Ñ Ñ a1,n+1
Ñ Ñ Ñ Ñ Ñ Ñ Ñ Ñ
ai-1,1 ai-1,2 ai-1,i-1 ai-1,i ai-1, j ai, j+1 Ñ ai-1,n+1
ai,1 ai,2 ai,i-1 ai,i ai, j ai, j+1 Ñ ai,n+1
a j,1 a j,2 a j,i-1 a j,i a j, j a j, j+1 Ñ a j,n+1
Ñ Ñ Ñ Ñ Ñ a j+1, j+1 Ñ Ñ
an-1,1 an-1,1 Ñ Ñ an-1, j Ñ Ñ an-1,n+1
an,1 an,2 Ñ Ñ an, j Ñ Ñ an,n+1
y
{
zzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzz
The general algorithm for line reducdtion for the jth lines counted from 1 to n is given
as:
R@iD = R@iD- R@ jD ä a@i, jDÅÅÅÅÅÅÅÅÅÅÅÅa@ j, jD , i = j + 1, j + 2, ... .. n, and j = 1, 2, ... .. n - 1.
The resulting tridiagonal matrix will lock like :
a =
i
k
jjjjjjjjjjjjjjjjjjjjjjjjjjjjjjjj
a1,1 a1,2 Ñ Ñ a1, j Ñ Ñ Ñ a1,n+1
0 a2,2 Ñ Ñ Ñ Ñ Ñ Ñ Ñ
0 0 ai,i Ñ ai, j Ñ Ñ Ñ ai,n+1
0 0 0 ai+1, j-1 Ñ Ñ Ñ Ñ Ñ
0 0 0 0 a j, j a j, j+1 Ñ Ñ a j,n+1
0 0 0 0 0 a j+1, j+1 Ñ Ñ Ñ
0 0 0 0 0 0 an-1,n-1 an-1,n an-1,n+1
0 0 0 0 0 0 0 an,n an,n+1
y
{
zzzzzzzzzzzzzzzzzzzzzzzzzzzzzzzz
Therefore, our algorithm for backward substitution is:
xn =an,n+1ÅÅÅÅÅÅÅÅÅÅÅÅan,n
xi =ai,n+1 - ⁄
j=i+1
n
ai, j x j
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅai,i
, i = n, n - 1, n - 2, ..., 1; & j = i + 1, i + 2, ... n - 1.
Chapter-5.nb 9

Example 2
Solve the following set of linear equations:
2 x + y - 3 z = - 1
- x + 3 y + 2 z = 12
3 x + y - 3 z = 0
Solution
This is the matrix A which corresponds to the above linear equations:
A =
i
kjjjjjj
2 1 -3 -1
-1 3 2 12
3 1 -3 0
y
{zzzzzz
H 1ÅÅÅÅ2 R1 + R2L Ø HR2L, and H 3ÅÅÅÅ
2 R1 - R3L Ø HR3L, The resulting matrix becomes:
A =
i
k
jjjjjjjjj
2 1 -3 -1
0 7ÅÅÅÅ2
1ÅÅÅÅ2
23ÅÅÅÅÅÅ2
0 -1ÅÅÅÅÅÅÅ2
3ÅÅÅÅ2
3ÅÅÅÅ2
y
{
zzzzzzzzz
H 1ÅÅÅÅ7 R2 - R3L Ø HR3L, The resulting matrix becomes:
A =
i
k
jjjjjjjjj
2 1 -3 -1
0 7ÅÅÅÅ2
1ÅÅÅÅ2
23ÅÅÅÅÅÅ2
0 0 11ÅÅÅÅÅÅ7
22ÅÅÅÅÅÅ7
y
{
zzzzzzzzz
Using the backsubstitution method for the above triangular matrix:
11ÅÅÅÅÅÅ7 z = 22ÅÅÅÅÅÅ
7; hence : z = 2.
7ÅÅÅÅ2 y + 1ÅÅÅÅ
2 z = 23ÅÅÅÅÅÅ
2; hence : y = 2ÅÅÅÅ
7 H 23ÅÅÅÅÅÅ
2- 1ÅÅÅÅ
2 zL = 3.
2 x + y - 3 z = -1; hence : x = 1ÅÅÅÅ2 H-1 - y + 3 zL = 1.
Chapter-5.nb 10

Mathematica Solution
Clear@"Global`∗"D
A = 882, 1, −3, −1<, 8−1, 3, 2, 12<, 83, 1, −3, 0<<;
m = Length@A D;
eq@i_D := Sum@A@@i, jDD x@jD, 8j, 1, m<D � A@@i, m + 1DD
Table@eq@iD, 8i, 1, m<D êê TableForm
2 x@1D + x@2D − 3 x@3D � −1
−x@1D + 3 x@2D + 2 x@3D � 12
3 x@1D + x@2D − 3 x@3D � 0
For the jth lines counted from 1 to n:
A@@iDD = A@@iDD - A@@ jDD ä A@@i, jDDÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅA@@ j, jDD , where A@@ j, jDD ∫ 0;
j = 1, 2, ... .. n - 1; and i = j + 1, j + 2, ... .. n.
For@j = 1, j ≤ m − 1, j++,
8Which@A@@j, jDD == 0,
88A@@jDD, A@@j + 1DD< = 8A@@j + 1DD, A@@jDD<< D,
For@i = j + 1, i ≤ m, i++, A@@iDD =
A@@iDD − A@@jDD A@@i, jDD ê A@@j, jDD êê ChopD<D
Table@A@@iDD, 8i, 1, m<D êê TableForm
2 1 −3 −1
0 7���2
1���2
23�����2
0 0 11�����7
22�����7
xm =am,m+1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅam,m
xi =
ai,m+1- ⁄j=i+1
n
ai, j x j
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅai,i
, i = m - 1, n - 2, ..., 1; & j = i + 1, i + 2, ... m.
so x@mD = A@@m,m+1DDÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
A@@m,mDD
x@iD = HA@@i, m + 1DD-⁄ j=i+1m A@@i, jDD x@ jD L ê A@@i, iDD
Chapter-5.nb 11

x@mD = A@@m, m + 1DDê A@@m, mDD;
For@i = m − 1, i ≥ 1, i−−, x@iD =
HA@@i, m + 1DD − Sum@A@@i, jDD x@jD, 8j, i + 1, m<DLê
A@@i, iDDD
Table@x@iD, 8i, 1, m<D êê N
81., 3., 2.<
5.3 Solving Linear Equations using Gauss Gordon Elemination Method
Gauss-Jordan elimination is a variation of Gauss elimination in which the elements
above the major diagonal are eliminated (made zero) as well as the elements below the
major diagonal. The A matrix is transformed to a diagonal matrix. The rows are usu-
ally scaled to yield unity diagonal elements, which transforms the A matrix to the iden-
tity matrix, I. The transformed b vector is then the solution vector x. Gauss-Jordan
elimination can be used for single or multiple b vectors.
Example 3
Solve the following linear equations using Gauss Gordon elimenation method:
eq1 : 80 x1 - 20 x2 - 20 x3 = 20 ;
eq2 : -20 x1 + 40 x2 - 20 x3 = 20 ;
eq3 : -20 x1 - 20 x2 + 130 x3 = 20 ;
A =
i
kjjjjjj
80 -20 -20 20
-20 +40 -20 20
-20 -20 130 20
y
{zzzzzz
Chapter-5.nb 12

A =
i
kjjjjjj
80 -20 -20 20
-20 +40 -20 20
-20 -20 130 20
y
{zzzzzz ; Scaling perform: R1 ê80 fl
A =
i
kjjjjjj
1 -1 ê4 -1 ê4 1 ê4
-20 +40 -20 20
-20 -20 130 20
y
{zzzzzz ; ( R2 - H-20L R1) & fl ( R3 - H-20L R1)
A =
i
kjjjjjj
1 -1 ê4 -1 ê4 1 ê4
0 +35 -25 25
0 -25 125 25
y
{zzzzzz ; R2 ê35 fl
A =
i
kjjjjjj
1 -1 ê4 -1 ê4 1 ê4
0 1 -5 ê7 5 ê7
0 -25 125 25
y
{zzzzzz ; HR1 - H-1 ê4L R2L , HR3 - H-25L R2L
A =
i
kjjjjjj
1 0 -3 ê7 3 ê7
0 1 -5 ê7 5 ê7
0 0 750 ê7 300 ê7
y
{zzzzzz ; R3 ê H750 ê7L fl
A =
i
kjjjjjj
1 0 -3 ê7 3 ê7
0 1 -5 ê7 5 ê7
0 0 1 2 ê5
y
{zzzzzz ; HR1 - H-3 ê7L R3L , HR2 - H-5 ê7L R3L
A =
i
kjjjjjj
1 0 0 0.6
0 1 0 1.0
0 0 1 0.4
y
{zzzzzz ; ï Hx1 = 0.6 , x2 = 1.0 , x3 = 0.4 L
The solution of the previous example using Mathematica gives:
Chapter-5.nb 13

Clear@"Global`∗"D
eq1 = 80 x@1D − 20 x@2D − 20 x@3D � 20.;
eq2 = −20 x@1D + 40 x@2D − 20 x@3D � 20;
eq3 = −20 x@1D − 20 x@2D + 130 x@3D � 20;
Solve@8eq1, eq2, eq3<, 8x@1D, x@2D, x@3D<D
88x@1D → 0.6, x@2D → 1., x@3D → 0.4<<
The computer pseudo code for solving linear system of equations using Gauss-Gordon
elimination methode can be expressed as:
While A@@ j, jDD = 0 ; A@@ j DDóA@@ j + 1DD A@@ j DD = A@@ j DD ê A@@ j, j DD ; Which i ∫ j For i = 1, 2, ... .. m.
A@@i DD = A@@i DD- A@@ j DD A@@i, j DD ;
Example 4
Given the following Augmented matrix, solve the corresponding set of linear equations
using Gauss Gordon elimenation method.
eq1 : 4 x1 - x2 - x4 = 25 ;
eq2 : - x1 + 4 x2 - x3 - x5 = 5 0 ;
eq3 : -x2 + 4 x3 - x6 = 150 ;
eq4 : -x1 + 4 x4 - x5 - x7 = 0 ;
eq5 : -x2 - x4 + 4 x5 - x6 - x8 = 0 ;
eq6 : -x3 - x5 + 4 x6 - x9 = 50 ;
eq7 : -x4 + 4 x7 - x8 = 0 ;
eq8 : -x5 - x7 + 4 x8 - x9 = 0 ;
eq9 : -x6 - x8 + 4 x9 = 25 ;
Clear@"Global`∗"D
A = 880, 0, 0, −1, 0, 0, 4, −1, 0, 0<,
80, 0, 0, 0, −1, 0, −1, 4, −1, 0<,
84, −1, 0, −1, 0, 0, 0, 0, 0, 25.<,
8−1, 4, −1, 0, −1, 0, 0, 0, 0, 50<,
Chapter-5.nb 14

80, −1, 4, 0, 0, −1, 0, 0, 0, 150<,
8−1, 0, 0, 4, −1, 0, −1, 0, 0, 0<,
80, −1, 0, −1, 4, −1, 0, −1, 0, 0<,
80, 0, −1, 0, −1, 4, 0, 0, −1, 50<,
80, 0, 0, 0, 0, −1, 0, −1, 4, 25<<;
a1 = 88−2.9, 0.9, 0, 0, 0, 0.01, 0, 0, 0, 0, −0.1395<,
81.0, −2.9, 0.9, 0, 0, 0, 0, 0, 0.01, 0, −0.080<,
80, 1.0, −2.9, 0.9, 0, 0, 0, 0, 0, 0, −0.153<,
80, 0, 1.0, −2.9, 0.9, 0, 0, 0, 0, 0, −0.173<,
80.01, 0, 0, 1.0, −2.9, 0.9, 0, 0, 0, 0, −0.1842<,
80, 0, 0, 0, 1.00, −2.9, 0.9, 0, 0, 0, −0.255<,
80, 0, 0, 0, 0, 1.0, −2.9, 0.9, 0, 0, −0.296<,
80, 0, 0.01, 0, 0, 0, 1.0, −2.9, 0.9, 0, −0.3826<,
80.01, 0, 0, 0, 0, 0, 0, 1.0, −2.9, 0.9, −0.3492<,
80, 0, 0, 0, 0, 0, 0, 0, 1.0, −2.9, −1.05<<;
a = 882, 1, −3, −1<, 8−1, 3, 2, 12<, 83, 1, −3, 0<<;
m = Length@A D;
eq@i_D := Sum@A@@i, jDD x@jD, 8j, 1, m<D � A@@i, m + 1DD
Table@eq@iD, 8i, 1, m<D êê TableForm
For@j = 1, j ≤ m, j++,
8k = 1, While@A@@j, jDD == 0, 88A@@jDD, A@@j + kDD< =
8A@@j + kDD, A@@jDD<, k = k + 1<D,
A@@jDD = A@@jDDê A@@j, jDD, For@i = 1, i ≤ m, i++,
8Which@i ≠ j, A@@iDD = A@@iDD − A@@jDD A@@i, jDDD,
A = Table@A@@kDD êê Chop, 8k, 1, m<D<D<D
Table@A@@iDD, 8i, 1, m<D êê TableForm
t1 = Table@8x@nD, A@@n, m + 1DD<, 8n, 1, m<D;
TableForm@t1, TableSpacing → 81, 1<,
TableHeadings → 88<, 8"Variable", "Value"<<D
Chapter-5.nb 15

−x@4D + 4 x@7D − x@8D � 0
−x@5D − x@7D + 4 x@8D − x@9D � 0
4 x@1D − x@2D − x@4D � 25.
−x@1D + 4 x@2D − x@3D − x@5D � 50
−x@2D + 4 x@3D − x@6D � 150
−x@1D + 4 x@4D − x@5D − x@7D � 0
−x@2D − x@4D + 4 x@5D − x@6D − x@8D � 0
−x@3D − x@5D + 4 x@6D − x@9D � 50
−x@6D − x@8D + 4 x@9D � 25
1 0 0 0 0 0 0 0 0 18.75
0 1 0 0 0 0 0 0 0 37.5
0 0 1 0 0 0 0 0 0 56.25
0 0 0 1 0 0 0 0 0 12.5
0 0 0 0 1 0 0 0 0 25.
0 0 0 0 0 1 0 0 0 37.5
0 0 0 0 0 0 1 0 0 6.25
0 0 0 0 0 0 0 1 0 12.5
0 0 0 0 0 0 0 0 1 18.75
Variable Value
x@1D 18.75
x@2D 37.5
x@3D 56.25
x@4D 12.5
x@5D 25.
x@6D 37.5
x@7D 6.25
x@8D 12.5
x@9D 18.75
5.4 Solving Linear Equations using Matrix Inversion
Cosider a system of linear equations expressed in matrix form: A ÿ x = b. The solution
can be represented in matrix form as: x = A-1 ÿ b. Where A-1 is the inverse matrix such
that: A ÿ A-1 = A-1 ÿ A = 1.
Chapter-5.nb 16

Example 5
Find the inverse of the matrix A given as: A={{1, 2, -1},{2, 1, 0},{-1, 1, 2}};
A =
i
kjjjjjj
1 2 -1
2 1 0
-1 1 2
y
{zzzzzz
Solution
To determine the inverse of the matrix A take a matrix B given as:
B =
i
kjjjjjj
b11 b12 b13
b21 b22 b23
b31 b32 b33
y
{zzzzzz
and A ÿB =
i
kjjjjjj
b11 + 2 b21 - b31 b12 + 2 b22 - b32 b13 + 2 b23 - b33
2 b11 + b21 2 b12 + b22 2 b13 + b23
-b11 + b21 + 2 b31 -b12 + b22 + 2 b32 -b13 + b23 + 2 b33
y
{zzzzzz
If A ÿB = I , then we get the equations:
b11 + 2 b21 - b31 = 1 ; b12 + 2 b22 - b32 = 0 ; b13 + 2 b23 - b33 = 0 ;
2 b11 + b21 = 0 ; 2 b12 + b22 = 1; 2 b13 + b23 = 0;
-b11 + b21 + 2 b31 = 0 ; -b12 + b22 + 2 b32 = 0 ; -b13 + b23 + 2 b33 = 1 ;
Notice that the coefficients in each of the systems of equations are the same, the only
change in the systems occurs on the right side of the equations. As a consequence,
Guass elimination can be performed for the three set of equations expresed as the
augmented matrises :
A1 =
i
kjjjjjj
1 2 -1 1
2 1 0 0
-1 1 2 0
y
{zzzzzz ; A2 =
i
kjjjjjj
1 2 -1 0
2 1 0 1
-1 1 2 0
y
{zzzzzz ; A3 =
i
kjjjjjj
1 2 -1 0
2 1 0 0
-1 1 2 1
y
{zzzzzz
Chapter-5.nb 17

Mathematica Solution
Clear@"Global`∗"D
a@1D = 881, 2, −1, 1<, 82, 1, 0, 0<, 8−1, 1, 2, 0<<;
a@2D = 881, 2, −1, 0<, 82, 1, 0, 1<, 8−1, 1, 2, 0<<;
a@3D = 881, 2, −1, 0<, 82, 1, 0, 0<, 8−1, 1, 2, 1<<;
m = Length@a@1DD;
f@n_D := Module@8A = a@nD<, For@j = 1, j ≤ m − 1, j++,
8k = 1, While@A@@j, jDD == 0,
88A@@jDD, A@@j + kDD< = 8A@@j + kDD, A@@jDD<,
k = k + 1< D, For@i = j + 1, i ≤ m, i++,
A@@iDD = A@@iDD − A@@jDD A@@i, jDDê A@@j, jDD êê
ChopD<D; Table@A@@iDD, 8i, 1, m<D;
x@mD = A@@m, m + 1DDê A@@m, mDD;
For@i = m − 1, i ≥ 1, i−−, x@iD =
HA@@i, m + 1DD − Sum@A@@i, jDD x@jD, 8j, i + 1, m<DLê
A@@i, iDDD; Table@x@iD, 8i, 1, m<DD
B = Table@f@nD, 8n, 1, m<D;
Transpose@BD êê MatrixForm
i
k
jjjjjjjj
− 2���9
5���9
− 1���9
4���9
− 1���9
2���9
− 1���3
1���3
1���3
y
{
zzzzzzzz
A = 881, 2, −1<, 82, 1, 0<, 8−1, 1, 2<<;
Inverse@AD êê MatrixForm
i
k
jjjjjjjj
− 2���9
5���9
− 1���9
4���9
− 1���9
2���9
− 1���3
1���3
1���3
y
{
zzzzzzzz
Chapter-5.nb 18

5.5 Matrix Inversion Using Gauss Jordon Elemination Method
The inverse of a square matrix A is the matrix A-1 such that A A-1 = A-1 A = I .
Gauss-Jordan elimination can be used to evaluate the inverse of matrix A by augment-
ing A with the identity matrix I and applying the Gauss-Jordan algorithm. The trans-
formed A matrix is the identity matrix I, and the transformed identity matrix is the
matrix inverse, A-1. Thus, applying Gauss-Jordan elimination yields :
@A » I Dï @I » A-1D.Cramers Rule can then be applied to solve the linear equations as : x = A-1 b .
Step 1: changed the augmented (n ä n) A matrix to the n ä n identity matrix, I.
Steps 2 : Before performing Step 3, the pivot element is scaled to unity by dividing all
elements in the row by the pivot element.
Step 3 : expand to perform elimination above the pivot element as well as below the
pivot element. At the conclusion of step 3, the matrix A has been transformed to the
identity matrix, I, and the original identity matrix, I, has been transformed to the matrix
inverse, A-1.
Example 6
Solve the following linear equations by calculating the matrix inverse using Gauss
Jordon elimenation method, then using Cramers rule:
eq1 : 80 x1 - 20 x2 - 20 x3 = 20 ;
eq2 : -20 x1 + 40 x2 - 20 x3 = 20 ;
eq3 : -20 x1 - 20 x2 + 130 x3 = 20 ;
@A » I D =i
kjjjjjj
80 -20 -20
-20 +40 -20
-20 -20 130
ƒƒƒƒƒƒƒƒƒƒƒƒ
1 0 0
0 1 0
0 0 1
y
{zzzzzz
@A » I D =i
kjjjjjj
1 0 0
0 1 0
0 0 1
ƒƒƒƒƒƒƒƒƒƒƒƒ
2 ê125 1 ê100 1 ê2500
1 ê100 1 ê30 1 ê150
1 ê250 1 ê150 7 ê750
y
{zzzzzz
Chapter-5.nb 19

A-1 =
i
kjjjjjj
0.016 0.010 0.004
0.010 0.033 0.0066
0.004 0.0066 0.00933
y
{zzzzzz ;
Clear@"Global`∗"D
eq1 = 80 x@1D − 20 x@2D − 20 x@3D; b1 = 20.;
eq2 = −20 x@1D + 40 x@2D − 20 x@3D; b2 = 20;
eq3 = −20 x@1D − 20 x@2D + 130 x@3D; b3 = 20;
A = 8880, −20, −20<, 8−20, 40, −20<, 8−20, −20, 130<<;
b = 8b1, b2, b3<;
Solve@8eq1 � b1, eq2 � b2, eq3 � b3<,
8x@1D, x@2D, x@3D<D
88x@1D → 0.6, x@2D → 1., x@3D → 0.4<<
80.6, 1., 0.4<
Chapter-5.nb 20

Mathematica code for Matrix Inversion
Clear@"Global`∗"D
A = 8880, −20, −20, 1, 0, 0<,
8−20, 40, −20, 0, 1, 0<, 8−20, −20, 130, 0, 0, 1<<;
b = 820, 20, 20<;
m = Length@A D;
For@j = 1, j ≤ m, j++,
8k = 1, Which@A@@j, jDD == 0, 88A@@jDD, A@@j + kDD< =
8A@@j + kDD, A@@jDD<, k = k + 1< D,
A@@jDD = A@@jDDê A@@j, jDD, For@i = 1, i ≤ m, i++,
8Which@i ≠ j, A@@iDD = A@@iDD − A@@jDD A@@i, jDDD,
A = Table@A@@nDD, 8n, 1, m<D<D<D
Table@A@@iDD, 8i, 1, m<D êê TableForm
Ainv = Table@A@@i, jDD, 8i, 1, m<, 8j, m + 1, 2 m<D;
Ainv êê TableForm
Ainv.b êê N
1 0 0 2�������125
1�������100
1�������250
0 1 0 1�������100
1�����30
1�������150
0 0 1 1�������250
1�������150
7�������750
2�������125
1�������100
1�������250
1�������100
1�����30
1�������150
1�������250
1�������150
7�������750
80.6, 1., 0.4<
5.6 Solution of Linear Equations Using Cramer's Rule
The solution of the following set of linear equations using Cramer's rule is as follows:
eq1 = a11 x1 + a12 x2 + a13 x3 == b1
eq2 = a21 x1 + a22 x2 + a23 x3 == b2
Chapter-5.nb 21

eq3 = a31 x1 + a32 x2 + a33 x3 == b3
these equations can be represented in matrix form as:
A =
i
kjjjjjj
a11 a12 a13
a21 a22 a23
a31 a32 a33
y
{zzzzzz and b =
i
kjjjjjj
b1
b2
b3
y
{zzzzzz
The solutions for x1, x2 , x3 are determine using Cramer's rule are :
D =
i
kjjjjjj
a11 a12 a13
a21 a22 a23
a31 a32 a33
y
{zzzzzz x1 b =
i
kjjjjjj
b1 a12 a13
b2 a22 a23
b3 a32 a33
y
{zzzzzz thus : x1 =
Det@x1 bDÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅDet@AD
D =
i
kjjjjjj
a11 a12 a13
a21 a22 a23
a31 a32 a33
y
{zzzzzz x2 b =
i
kjjjjjj
a11 b1 a13
a21 b2 a23
a31 b3 a33
y
{zzzzzz thus : x2 =
Det@x2 b DÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅDet@AD
D =
i
kjjjjjj
a11 a12 a13
a21 a22 a23
a31 a32 a33
y
{zzzzzz x2 b =
i
kjjjjjj
a11 a12 b1
a21 a22 b2
a31 a32 b3
y
{zzzzzz thus : x3 =
Det@x3 b DÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅDet@AD
The determinant of the matrix D can be determined by writing the augmented matrix
as:
@D, aD =i
kjjjjjj
a11 a12 a13 a11 a12
a21 a22 a23 a21 a22
a31 a32 a33 a31 a32
y
{zzzzzz
The determinant is expresed as :
» D » = Ha11 a22 a33 + a12 a23 a31 + a31 a21 a32 L- H a12 a21 a33 + a11 a23 a32 + a13 a22 a31 L
The algorithm of calculating the determinant of a matrix can be expresed as :
» D » = ⁄ j=0m-1 ¤i=1
m ai, j+i - ⁄ j=2 mm+1 ¤i=1
m ai, j-i
Chapter-5.nb 22

Clear@"Global`∗"D
A = Table@a@i, jD, 8i, 1, 3<, 8j, 1, 3<D;
m = Length@AD;
A êê MatrixForm
B1 = Transpose@8A, Drop@A, 8<, 8m<D<D êê Flatten;
B = Partition@B1, 2 m − 1D;
B êê MatrixForm
det =
Sum@Product@B@@i, i + jDD, 8i, 1, m<D, 8j, 0, m − 1<D
−Sum@Product@B@@i, j − iDD, 8i, 1, m<D,
8j, 2 m, m + 1, −1<D
i
k
jjjjjj
a@1, 1D a@1, 2D a@1, 3Da@2, 1D a@2, 2D a@2, 3D
a@3, 1D a@3, 2D a@3, 3D
y
{
zzzzzz
i
k
jjjjjj
a@1, 1D a@1, 2D a@1, 3D a@1, 1D a@1, 2Da@2, 1D a@2, 2D a@2, 3D a@2, 1D a@2, 2D
a@3, 1D a@3, 2D a@3, 3D a@3, 1D a@3, 2D
y
{
zzzzzz
a@1, 2D a@2, 3D a@3, 1D +
a@1, 3D a@2, 1D a@3, 2D + a@1, 1D a@2, 2D a@3, 3D
−a@1, 3D a@2, 2D a@3, 1D −
a@1, 1D a@2, 3D a@3, 2D − a@1, 2D a@2, 1D a@3, 3D
Example 7
Solve the following set of linear equations using Cramer's rule:
2 x + y - 3 z = - 1
- x + 3 y + 2 z = 12
3 x + y - 3 z = 0
Chapter-5.nb 23

The Matrix of the Coefficients is given as:
A =
i
kjjjjjj
2 1 -3
-1 3 2
3 1 -3
y
{zzzzzz and b =
i
kjjjjjj-1
12
0
y
{zzzzzz
To determine using Cramer's rule x, y, and z are :
x =
i
kjjjjjjj-1 1 -3
12 3 2
0 1 -3
y
{zzzzzzz
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅi
kjjjjjjj
2 1 -3
-1 3 2
3 1 -3
y
{zzzzzzz
=Det@x bDÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅDet@AD ; y =
i
kjjjjjjj1 -1 -3
3 12 2
1 0 -3
y
{zzzzzzz
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅi
kjjjjjjj
2 1 -3
-1 3 2
3 1 -3
y
{zzzzzzz
=Det@y bDÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅDet@AD ; and
z =
i
kjjjjjjj-3 1 -1
2 3 12
-3 1 0
y
{zzzzzzz
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅi
kjjjjjjj
2 1 -3
-1 3 2
3 1 -3
y
{zzzzzzz
=Det@z bDÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅDet@AD
Clear@"Global`∗"D
A = 882, 1, −3<, 8−1, 3, 2<, 83, 1, −3<<;
b = 8−1, 12, 0<;
xb = 88−1, 1, −3<, 812, 3, 2<, 80, 1, −3<<;
yb = 882, −1, −3<, 8−1, 12, 2<, 83, 0, −3<<;
zb = 882, 1, −1<, 8−1, 3, 12<, 83, 1, 0<<;
8x = Det@xbDê Det@AD êê N,
y = Det@ybDê Det@AD êê N, z = Det@zbDê Det@AD êê N<
81., 3., 2.<
Chapter-5.nb 24

Clear@"Global`∗"D
A = 882, 1, −3<, 8−1, 3, 2<, 83, 1, −3<<;
b = 8−1, 12, 0<;
xb = 88−1, 1, −3<, 812, 3, 2<, 80, 1, −3<<;
yb = 882, −1, −3<, 8−1, 12, 2<, 83, 0, −3<<;
zb = 882, 1, −1<, 8−1, 3, 12<, 83, 1, 0<<;
m = Length@AD;
B1 = Transpose@8A, Drop@A, 8<, 83<D<D êê Flatten;
B = Partition@B1, 2 m − 1D
detA =
Sum@Product@B@@i, i + jDD, 8i, 1, m<D, 8j, 0, m − 1<D −
Sum@Product@B@@i, j − iDD, 8i, 1, m<D,
8j, 2 m, m + 1, −1<D
882, 1, −3, 2, 1<, 8−1, 3, 2, −1, 3<, 83, 1, −3, 3, 1<<
11
B2 = Transpose@8xb, Drop@xb, 8<, 83<D<D êê Flatten;
B22 = Partition@B2, 2 m − 1D
detxb =
Sum@Product@B22@@i, i + jDD, 8i, 1, m<D, 8j, 0, m − 1<D −
Sum@Product@B22@@i, j − iDD, 8i, 1, m<D,
8j, 2 m, m + 1, −1<D
x = detxbêdetA
88−1, 1, −3, −1, 1<, 812, 3, 2, 12, 3<, 80, 1, −3, 0, 1<<
11
1
Chapter-5.nb 25
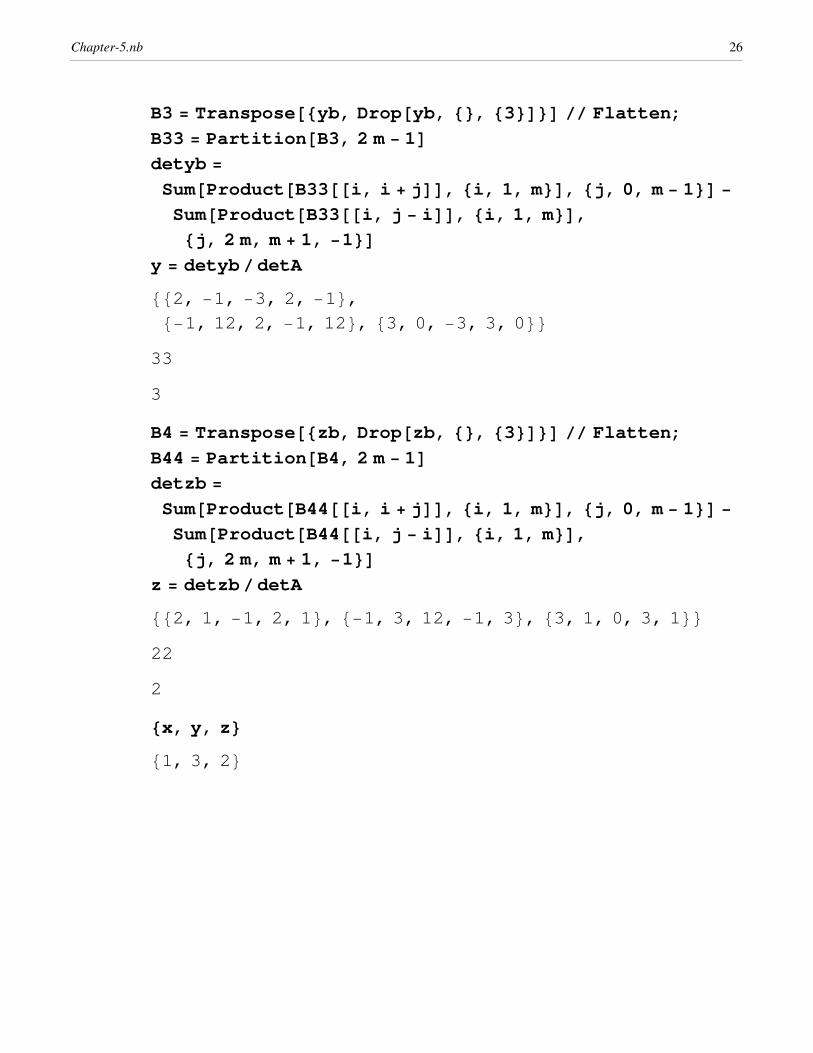
B3 = Transpose@8yb, Drop@yb, 8<, 83<D<D êê Flatten;
B33 = Partition@B3, 2 m − 1D
detyb =
Sum@Product@B33@@i, i + jDD, 8i, 1, m<D, 8j, 0, m − 1<D −
Sum@Product@B33@@i, j − iDD, 8i, 1, m<D,
8j, 2 m, m + 1, −1<D
y = detybêdetA
882, −1, −3, 2, −1<,
8−1, 12, 2, −1, 12<, 83, 0, −3, 3, 0<<
33
3
B4 = Transpose@8zb, Drop@zb, 8<, 83<D<D êê Flatten;
B44 = Partition@B4, 2 m − 1D
detzb =
Sum@Product@B44@@i, i + jDD, 8i, 1, m<D, 8j, 0, m − 1<D −
Sum@Product@B44@@i, j − iDD, 8i, 1, m<D,
8j, 2 m, m + 1, −1<D
z = detzbêdetA
882, 1, −1, 2, 1<, 8−1, 3, 12, −1, 3<, 83, 1, 0, 3, 1<<
22
2
8x, y, z<
81, 3, 2<
Chapter-5.nb 26

5.7 Solving Linear Equations using Iteration Method
Iterative methods are used when the number of equations is large and most of the coeffi-
cients are zero (i.e., a sparse matrix). Iterative methods generally diverge unless the
system of equations is diagonally dominant.
Consider the following linear equations:
a11 x1 + a12 x2 + a13 x3 + ... .. + a1 m xm = a1,m+1
a21 x1 + a22 x2 + a23 x3 + ... .. + a2 m xm = a2,m+1
a31 x1 + a32 x2 + a33 x3 + ... .. + a3 m xm = a3,m+1
.......
am-1,1 x1 + am-1,2 x2 + am-1,3 x3 + ... .. + am-1,m xm = am-1,m+1
am,1 x1 + am,2 x2 + am,3 x3 + ... .. + am,m xm = am,m+1
First, set an initial value for all xi = 0, and solving the first equation for x1, the second
equation for x2, .......up to xm , we get the following set of equations :
x1 = Ha1,m+1 - a12 x20 - a13 x3
0 - ... .. - a1 m xm0 L êa11
x2 = Ha2,m+1 - a21 x1 - a23 x30 - ... .. - a2 m xm
0 L êa22
x3 = Ha3,m+1 - a31 x1 - a32 x2 - a34 x40 - ....-a3 m xm
0 L êa33
................
xi = Hai,m+1 - ai,1 x1 - ai,2 x2 - ... - ai,i-1 xi-1 - ... - ai,i+1 xi+10 - ... -
ai,m-1 xm-10 - ai,m xm
0 L êai,i
................
xm-1 =
Ham-1,m+1 - am-1,1 x1 - am-1,2 x2 - am-1,3 x3 - ... ... - am-1,m-2 xm-2 - am-2,m xm0 L ê
am-1,m-1
xm = H am,m+1 - am,1 x1 - am,2 x2 - am,3 x3 - ... .. - am,m-1 xm-1L êam,m
In general, the set of equations can be written as :
xi = Hai,m+1 -⁄ j=1i-1 ai, j x j -⁄ j=i+1
m ai, j x j0 L êai,i
where x j0 is the assigned old values, and x j are the most newley calculated values.
Chapter-5.nb 27

Example 8
Consider the following system of equations to be solved for x1, x2, ... ... .. x9 using
the Iteration method. Given the equations as:
eq1 : 4 x1 - x2 - x4 = 25 ;
eq2 : - x1 + 4 x2 - x3 - x5 = 5 0 ;
eq3 : -x2 + 4 x3 - x6 = 150 ;
eq4 : -x1 + 4 x4 - x5 - x7 = 0 ;
eq5 : -x2 - x4 + 4 x5 - x6 - x8 = 0 ;
eq6 : -x3 - x5 + 4 x6 - x9 = 50 ;
eq7 : -x4 + 4 x7 - x8 = 0 ;
eq8 : -x5 - x7 + 4 x8 - x9 = 0 ;
eq9 : -x6 - x8 + 4 x9 = 25 ;
Chapter-5.nb 28

Clear@"Global`∗"D
A = 884, −1, 0, −1, 0, 0, 0, 0, 0, 25<,
8−1, 4, −1, 0, −1, 0, 0, 0, 0, 50<,
80, −1, 4, 0, 0, −1, 0, 0, 0, 150<,
8−1, 0, 0, 4, −1, 0, −1, 0, 0, 0<,
80, −1, 0, −1, 4, −1, 0, −1, 0, 0<,
80, 0, −1, 0, −1, 4, 0, 0, −1, 50<,
80, 0, 0, −1, 0, 0, 4, −1, 0, 0<,
80, 0, 0, 0, −1, 0, −1, 4, −1, 0<,
80, 0, 0, 0, 0, −1, 0, −1, 4, 25<<;
m = Length@A D; B = A; n = 50;
eq@i_D := Sum@A@@i, jDD x@jD, 8j, 1, m<D � A@@i, 10DD
Table@eq@iD, 8i, 1, m<D êê TableForm
Table@x0@iD = 0, 8i, 1, m<D;
x@i_D :=
HB@@i, m + 1DD − Sum@B@@i, jDD x@jD, 8j, 1, i − 1<D −
Sum@A@@i, jDD x0@jD, 8j, i + 1, m<DL êB@@i, iDD
For@k = 1, k ≤ n, k++, 8For@i = 1, i ≤ m, i++, x@iDD,
Table@x0@iD = x@iD, 8i, 1, m<D<D
Table@x@iD, 8i, 1, m<D êê N
Chapter-5.nb 29

4 x@1D − x@2D − x@4D � 25
−x@1D + 4 x@2D − x@3D − x@5D � 50
−x@2D + 4 x@3D − x@6D � 150
−x@1D + 4 x@4D − x@5D − x@7D � 0
−x@2D − x@4D + 4 x@5D − x@6D − x@8D � 0
−x@3D − x@5D + 4 x@6D − x@9D � 50
−x@4D + 4 x@7D − x@8D � 0
−x@5D − x@7D + 4 x@8D − x@9D � 0
−x@6D − x@8D + 4 x@9D � 25
818.75, 37.5, 56.25, 12.5, 25., 37.5, 6.25, 12.5, 18.75<
Compare with the Guassian elemination method
Chapter-5.nb 30

Mathematica Solution 2
Clear@"Global`∗"D
A = 884, −1, 0, −1, 0, 0, 0, 0, 0, 25<,
8−1, 4, −1, 0, −1, 0, 0, 0, 0, 50<,
80, −1, 4, 0, 0, −1, 0, 0, 0, 150<,
8−1, 0, 0, 4, −1, 0, −1, 0, 0, 0<,
80, −1, 0, −1, 4, −1, 0, −1, 0, 0<,
80, 0, −1, 0, −1, 4, 0, 0, −1, 50<,
80, 0, 0, −1, 0, 0, 4, −1, 0, 0<,
80, 0, 0, 0, −1, 0, −1, 4, −1, 0<,
80, 0, 0, 0, 0, −1, 0, −1, 4, 25<<;
m = Length@A D;
eq@i_D := Sum@A@@i, jDD x@jD, 8j, 1, m<D � A@@i, m + 1DD
Table@eq@iD, 8i, 1, m<D êê TableForm
For@j = 1, j ≤ m − 1, j++,
8Which@A@@j, jDD == 0,
88A@@jDD, A@@j + 1DD< = 8A@@j + 1DD, A@@jDD<< D,
For@i = j + 1, i ≤ m, i++, A@@iDD =
A@@iDD − A@@jDD A@@i, jDD ê A@@j, jDD êê ChopD<D
Table@A@@iDD, 8i, 1, m<D êê TableForm
x@mD = A@@m, m + 1DDê A@@m, mDD;
For@i = m − 1, i ≥ 1, i−−, x@iD =
HA@@i, m + 1DD − Sum@A@@i, jDD x@jD, 8j, i + 1, m<DLê
A@@i, iDDD
Table@x@iD, 8i, 1, m<D êê N
Chapter-5.nb 31

4 x@1D − x@2D − x@4D � 25
−x@1D + 4 x@2D − x@3D − x@5D � 50
−x@2D + 4 x@3D − x@6D � 150
−x@1D + 4 x@4D − x@5D − x@7D � 0
−x@2D − x@4D + 4 x@5D − x@6D − x@8D � 0
−x@3D − x@5D + 4 x@6D − x@9D � 50
−x@4D + 4 x@7D − x@8D � 0
−x@5D − x@7D + 4 x@8D − x@9D � 0
−x@6D − x@8D + 4 x@9D � 25
4 −1 0 −1 0 0 0
0 15�����4
−1 − 1���4
−1 0 0
0 0 56�����15
− 1�����15
− 4�����15
−1 0
0 0 0 209�������56
− 15�����14
− 1�����56
−1
0 0 0 0 712�������209
− 225�������209
− 60�����209
0 0 0 0 0 2415���������712
− 17�����178
0 0 0 0 0 0 8948��������2415
0 0 0 0 0 0 0
0 0 0 0 0 0 0
818.75, 37.5, 56.25, 12.5, 25., 37.5, 6.25, 12.5, 18.75<
5.8 Problems
Problem 1
Solve the following set linear equations the Gaussian elimination and backward substitu-
tion method.
2 x1 - 3 x2 - x3 = -3 ;
-x1 + 2 x2 + x3 = -2 ;
3 x1 - 2 x2 + 3 x3 = 4 ;
Chapter-5.nb 32

Problem 2
Solve the following set linear equations the Gauss Gordon elimenation method.
2 x1 - 3 x2 - x3 = -3 ;
-x1 + 2 x2 + x3 = -2 ;
3 x1 - 2 x2 + 3 x3 = 4 ;
Problem 3
Solve the following linear set of equations by calculating the matrix inversion using
Gauss Jordon elimenation method to evaluate x1, x2, and x3.
2 x1 - 3 x2 - x3 = -3 ;
-x1 + 2 x2 + x3 = -2 ;
3 x1 - 2 x2 + 3 x3 = 4 ;
Problem 4
Solve the following linear set of equations using the determinant method and Cramer's
rule to evaluate x1, x2, and x3. Use numerical algorithm (in chapter 5) to evaluate the
determinants.
2 x1 - 3 x2 - x3 = -3 ;
-x1 + 2 x2 + x3 = -2 ;
3 x1 - 2 x2 + 3 x3 = 4 ;
Problem 5
Solve the following linear set of equations using the eteration method to evaluate
x1, x2, and x3.
2 x1 - 3 x2 - x3 = -3 ;
-x1 + 2 x2 + x3 = -2 ;
3 x1 - 2 x2 + 3 x3 = 4 ;
Chapter-5.nb 33