
Abscissas and weights for Guassian quadrature for N=2 to ...
Upload
independentCategory
view
5download
0
PLEASE SCROLL DOWN FOR ARTICLE
This article was downloaded by: [Indest open Consortium]On: 15 October 2009Access details: Access Details: [subscription number 907749878]Publisher Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
International Journal for Computational Methods in Engineering Science andMechanicsPublication details, including instructions for authors and subscription information:http://www.informaworld.com/smpp/title~content=t713872093
Differential Quadrature Method for Two-Dimensional Burgers' EquationsR. C. Mittal a; Ram Jiwari a
a Indian Institute of Technology Roorkee, Roorkee, India
Online Publication Date: 01 November 2009
To cite this Article Mittal, R. C. and Jiwari, Ram(2009)'Differential Quadrature Method for Two-Dimensional Burgers'Equations',International Journal for Computational Methods in Engineering Science and Mechanics,10:6,450 — 459
To link to this Article: DOI: 10.1080/15502280903111424
URL: http://dx.doi.org/10.1080/15502280903111424
Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf
This article may be used for research, teaching and private study purposes. Any substantial orsystematic reproduction, re-distribution, re-selling, loan or sub-licensing, systematic supply ordistribution in any form to anyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representation that the contentswill be complete or accurate or up to date. The accuracy of any instructions, formulae and drug dosesshould be independently verified with primary sources. The publisher shall not be liable for any loss,actions, claims, proceedings, demand or costs or damages whatsoever or howsoever caused arising directlyor indirectly in connection with or arising out of the use of this material.

International Journal for Computational Methods in Engineering Science and Mechanics, 10:450–459, 2009Copyright c© Taylor & Francis Group, LLCISSN: 1550–2287 print / 1550–2295 onlineDOI: 10.1080/15502280903111424
Differential Quadrature Method for Two-DimensionalBurgers’ Equations
R. C. Mittal and Ram JiwariIndian Institute of Technology Roorkee, Roorkee, India
In this paper we propose a rapid convergent differential quadra-ture method (DQM) for calculating the numerical solutions of non-linear two-dimensional Burgers’ equations with appropriate initialand boundary conditions. The two dimensional Burgers’ equationsarise in various kinds of phenomena such as a mathematical modelof turbulence and the approximate theory of flow through a shockwave traveling in a viscous fluid. To the best of the authors’ knowl-edge, this is the first attempt that the system has been solved upto big time level t = 15 and big Reynolds number R = 1200. Wealso found that Chebyshev-Gauss-Lobatto grid points give excel-lent results in comparison to other grid points such as uniformgrid points. Two test problems considered by different researchershave been studied to demonstrate the accuracy and utility of thepresent method. Results obtained by the method have been com-pared with the exact solutions and with those given by researchersfor each problem. Solutions obtained by DQM are found to be verygood and useful. Convergence and stability of the method is alsoexamined.
Keywords Two-Dimensional Burgers’ Equation, Differential Quadra-ture Method, System of Ordinary Differential Equations,Runge-Kutta Method
1. INTRODUCTIONConsider the system of two-dimensional Burgers’ equations
in a rectangle D:
∂u
∂t+ u
∂u
∂x+ v
∂u
∂y= 1
R
(∂2u
∂x2+ ∂2u
∂y2
)(1)
∂v
∂t+ u
∂v
∂x+ v
∂v
∂y= 1
R
(∂2v
∂x2+ ∂2v
∂y2
)(2)
Received 25 July 2008; accepted 9 March 2009.The authors gratefully acknowledge the valuable suggestions and
observations of the anonymous referees to improve the quality of thepaper. The second author, Ram Jiwari, thankfully acknowledges thefinancial assistance provided by UGC India.
Address correspondence to R.C. Mittal, Department of Mathemat-ics, Indian Institute of Technology Roorkee, Roorkee-247667, Uttarak-hand, India. E-mail: [email protected]
with initial conditions:
u (x, y, 0) = φ1 (x, y) , (x, y) ∈ D (3)
v (x, y, 0) = φ2 (x, y) , (x, y) ∈ D (4)
and the boundary conditions:
u (x, y, t) = f1 (x, y, t) , x, y ∈ ∂D, t > 0, (5)
v (x, y, t) = f2 (x, y, t) , x, y ∈ ∂D, t > 0, (6)
where D = {(x, y) : a ≤ x ≤ b, a ≤ y ≤ b} and ∂D is itsboundary; u (x, y, t) and v (x, y, t) are the velocity componentsto be determined, φ1, φ2, f1 and f2 are known functions andR is the Reynolds number.
The Burgers’ equations have been found to describe variouskinds of phenomena such as a mathematical model of turbu-lence [1] and the approximate theory of flow through a shockwave traveling in a viscous fluid [2]. The resemblance betweenBurgers’ equations and the Navier-Stokes equations makes thenumerical study of Burgers’ equations important to test numer-ical schemes for convection-diffusion phenomena. Thus, thenumerical study of the system is very important. The Hopf-Coletransform [2] can be used to construct exact solutions of Burg-ers’ equations for arbitrary boundary conditions. To find thenumerical solution of the system of equations (1)-(6) a num-ber of techniques have been developed by several researchers.Fletcher [3] has used the Hopf-Cole transformation to find thenumerical solution of system (1) and (2). Jain and Holla [4]have developed two algorithms based on cubic spline functiontechnique. Fletcher [5] has also given the comparison of a num-ber of different numerical approaches available at that time tosolve Burgers’ equation. Goyon [6] proposed several multilevelADI schemes while Wubs and Goede [7] discussed an explicit-implicit method for the solutions of (1) and (2). Recently,Bahadir [8] proposed a fully implicit finite-difference schemeand has compared results for two test problems with those ofJain and Holla . EI-Sayed and Kaya [9] have applied the decom-position method for the solution of two-dimensional Burgers’equations. Boules and Eick [15] have also applied a kind ofspectral method to find the solutions of Burgers’ equations.
450
Downloaded By: [Indest open Consortium] At: 08:27 15 October 2009

DQM FOR TWO-DIMENSIONAL BURGERS’ EQUATIONS 451
In this paper, we have applied a differential quadrature method(DQM) to solve two-dimensional Burgers’ equation numeri-cally. The equations are reduced into a system of ordinarydifferential equations by DQM. The obtained system of ordi-
nary differential equations is then solved by a fourth-stage RK4scheme given by Pike and Roe [10]. In order to demonstratethe accuracy of the present method and make a comparison ofnumerical solutions with exact ones, as well as with those given
FIG. 1. Concentration profiles of u of example 1 for t = 0, 1.0, . . . ,15.0. (Continued)
Downloaded By: [Indest open Consortium] At: 08:27 15 October 2009

452 R. C. MITTAL AND R. JIWARI
FIG. 1. (Continued.)
by other researchers, we have chosen two test problems given inthe literature. Our results are very good in comparison to otherresearchers. The investigated results are reported in Figures 1, 2and in Tables 1–9 and the convergence of the method has beenshown through Tables 10–11. Obtained solutions are found tobe very useful.
2. DIFFERENTIAL QUADRATURE METHODThe differential quadrature method is a numerical technique
for solving differential equations. It was first introduced by
Bellman et al. [11]. By this method, we approximate the deriva-tives of a function at any location by a linear summation of allthe functional values at a finite number of grid points; then theequation can be transformed into a set of ordinary differentialequations if the equation is unsteady, otherwise a set of algebraicequations. The solutions can be obtained by applying standardnumerical methods.
First the domain D is discretized by taking N points along x
direction and M points along y direction.According to the two-dimensional DQM, the partial deriva-
tives of nth and mth order of a dependent function u (x, y, t) can
TABLE 1Comparison between exact and numerical solutions of Example 1 when R = 100 at t = 0.01 with time step length 0.001
(M = N = 21)
u V
MP A.R. Bahadir [8] Present method Exact solution A.R. Bahadir [8] Present method Exact solution
(0.1,0.1) 0.62310 0.62305 0.62305 0.87688 0.87695 0.87695(0.5,0.1) 0.50161 0.50162 0.50162 0.99837 0.99838 0.99838(0.9,0.1) 0.50000 0.50001 0.50001 0.99998 0.99999 0.99999(0.3,0.3) 0.62311 0.62305 0.62305 0.87689 0.87695 0.87695(0.7,0.3) 0.50162 0.50162 0.50162 0.99838 0.99838 0.99838(0.1,0.5) 0.74827 0.74827 0.74827 0.75172 0.75172 0.75173(0.5,0.5) 0.62311 0.62305 0.62305 0.87689 0.87695 0.87695(0.9,0.5) 0.50162 0.50162 0.50162 0.99838 0.99838 0.99838(0.3,0.7) 0.74827 0.74827 0.74827 0.75173 0.75173 0.75173(0.7,0.7) 0.62311 0.62305 0.62305 0.87689 0.87695 0.87695(0.1,0.9) 0.74998 0.74999 0.74999 0.75001 0.75001 0.75001(0.5,0.9) 0.74827 0.74827 0.74827 0.75173 0.75172 0.75173(0.9,0.9) 0.62311 0.62305 0.62305 0.87689 0.87695 0.87695
Downloaded By: [Indest open Consortium] At: 08:27 15 October 2009

DQM FOR TWO-DIMENSIONAL BURGERS’ EQUATIONS 453
FIG. 2. Concentration profiles of u of example 2 for t = 0, 1.0, . . . , 10.0.
Downloaded By: [Indest open Consortium] At: 08:27 15 October 2009

454 R. C. MITTAL AND R. JIWARI
TABLE 2Comparison between exact and numerical solutions of Example 1 when R = 100 for t = 0.5 with time step length 0.001
(M = N = 21)
u V
MP A.R. Bahadir [8] Present method Exact solution A.R. Bahadir [8] Present method Exact solution
(0.1,0.1) 0.54235 0.54322 0.54332 0.95577 0.95678 0.95668(0.5,0.1) 0.49964 0.50035 0.50035 0.99827 0.99965 0.99965(0.9,0.1) 0.49931 0.50000 0.50000 0.99861 1.00000 1.00000(0.3,0.3) 0.54207 0.54321 0.54332 0.95596 0.95679 0.95668(0.7,0.3) 0.49961 0.50035 0.50035 0.99827 0.99964 0.99965(0.1,0.5) 0.74130 0.74219 0.74221 0.75699 0.75780 0.75779(0.5,0.5) 0.54222 0.54329 0.54332 0.95685 0.95671 0.95668(0.9,0.5) 0.49997 0.50035 0.50035 0.99903 0.99965 0.99965(0.3,0.7) 0.74146 0.74221 0.74221 0.75723 0.75779 0.75779(0.7,0.7) 0.54243 0.54332 0.54332 0.95746 0.95668 0.95668(0.1,0.9) 0.74913 0.74995 0.74995 0.74924 0.75005 0.75005(0.5,0.9) 0.74201 0.74221 0.74221 0.75781 0.75779 0.75779(0.9,0.9) 0.54232 0.54332 0.54332 0.95777 0.95667 0.95668
be approximated by the formula given in [12]
u(n)x (xi, yj , t) ∼=
N∑k=1
a(n)ik u(xk, yj , t) (7)
u(m)y (xi, yj , t) ∼=
M∑k=1
b(m)jk u (xi, yk, t) (8)
for i = 1, 2, . . . , N ; j = 1, 2, . . . , M; n = 1, 2, . . . , N −1; m = 1, 2, . . . ,M − 1
where u(n)x (xi, yj , t) and u(m)
y (xi, yj , t) indicate the nth and mthorder partial derivatives of u (x, y, t) with respect to x and yat grid points (xi, yj ) and a
(n)ij and b
(m)ij are the weighting co-
efficients related to u(n)x (xi, yj , t) and u(m)
y (xi, yj , t) at (xi, yj ).Bellman et al. [11] proposed two approaches to compute theweighting coefficients. To improve Bellman’s approaches incomputing the weighting coefficients, many attempts have beenmade by researchers. Chen has developed differential quadra-ture, generalized methods, related discrete element analysismethods, and the EDQ based direct time integration methods for
TABLE 3Comparison between exact and numerical solutions of Example 1 when R = 100 for t = 2.0 with time step length 0.001
(M = N = 21)
u V
MP A.R. Bahadir Present method Exact solution A.R. Bahadir Present method Exact solution
(0.1,0.1) 0.49983 0.50048 0.50048 0.99826 0.99952 0.99952(0.5,0.1) 0.49930 0.50000 0.50000 0.99860 1.00000 1.00000(0.9,0.1) 0.49930 0.50000 0.50000 0.99861 1.00000 1.00000(0.3,0.3) 0.49977 0.50048 0.50048 0.99820 0.99952 0.99952(0.7,0.3) 0.49930 0.50000 0.50000 0.99860 1.00000 1.00000(0.1,0.5) 0.55461 0.55540 0.55568 0.94393 0.94460 0.94432(0.5,0.5) 0.49973 0.50048 0.50048 0.99821 0.99952 0.99952(0.9,0.5) 0.49931 0.50000 0.50000 0.99862 1.00000 1.00000(0.3,0.7) 0.55429 0.55540 0.55568 0.94409 0.94460 0.94432(0.7,0.7) 0.49970 0.50048 0.50048 0.99823 0.99952 0.99952(0.1,0.9) 0.74340 0.74422 0.74426 0.75500 0.75578 0.75574(0.5,0.9) 0.55413 0.55541 0.55568 0.94441 0.94459 0.94432(0.9,0.9) 0.50001 0.50048 0.50048 0.99846 0.99952 0.99952
Downloaded By: [Indest open Consortium] At: 08:27 15 October 2009

DQM FOR TWO-DIMENSIONAL BURGERS’ EQUATIONS 455
TABLE 4Comparison between exact and numerical solutions of Example 1 when R = 1000 with time step length 0.001 (M = N = 23)
t = 2.0 t = 0.5
u v u V
MPPresentmethod
Exactsolution
Presentmethod
Exactsolution
Presentmethod
Exactsolution
Presentmethod
Exactsolution
(0.1,0.1) 0.50301 0.50000 0.99698 1.00000 0.50552 0.50000 0.99448 1.00000(0.5,0.1) 0.49988 0.50000 1.00012 1.00000 0.50253 0.50000 0.99747 1.00000(0.9,0.1) 0.50051 0.50000 0.99949 1.00000 0.50012 0.50000 0.99988 1.00000(0.1,0.5) 0.50091 0.50000 0.99908 1.00000 0.74845 0.75000 0.75154 0.75000(0.5,0.5) 0.49445 0.50000 1.00555 1.00000 0.51201 0.50000 0.98799 1.00000(0.9,0.5) 0.49885 0.50000 1.00045 1.00000 0.49869 0.50000 1.00131 1.00000(0.1,0.9) 0.76505 0.75000 0.73495 0.75000 0.74588 0.75000 0.75413 0.75000(0.9,0.9) 0.49796 0.50000 1.00203 1.00000 0.50828 0.50000 0.98119 1.00000
TABLE 5Comparison of numerical solutions of Example 2 when R = 50 for t = 0.625 with time step length 0.001 (M = N = 17)
u v
MP Jain and Holla A.R. Bahadir Present method Jain and Holla A.R. Bahadir Present method
(0.1,0.1) 0.97258 0.96688 0.96921 0.09773 0.09824 0.09787(0.3,0.1) 1.16214 1.14827 1.14940 0.14039 0.14112 0.14014(0.2,0.2) 0.86281 0.85911 0.86195 0.16660 0.16681 0.16708(0.4,0.2) 0.96483 0.97637 0.97972 0.17397 0.17065 0.17181(0.1,0.3) 0.66318 0.66019 0.66340 0.26294 0.26261 0.26362(0.3,0.3) 0.77030 0.76932 0.77201 0.22463 0.22576 0.22630(0.2,0.4) 0.58070 0.57966 0.58266 0.32402 0.32745 0.32873(0.4,0.4) 0.74435 0.75678 0.76065 0.31822 0.32441 0.32731
TABLE 6Comparison of numerical solutions of Example 2 when R = 500 for t = 0.625 with time step length 0.0005
u v
MPJain and Holla
N = 40A.R. Bahadir
N = 20Present method
N = M = 25Jain and Holla
N = 40A.R. Bahadir
N = 20Present method
N = M = 25
(0.15,0.1) 0.96066 0.96650 0.96761 0.08612 0.09020 0.08770(0.3,0.1) 0.96852 1.02970 1.04403 0.07712 0.10690 0.11439(0.1,0.2) 0.84104 0.84449 0.85449 0.17828 0.17972 0.18128(0.2,0.2) 0.86866 0.87631 0.91481 0.16202 0.16777 0.18443(0.1,0.3) 0.67792 0.67809 0.68668 0.26094 0.26222 0.26514(0.3,0.3) 0.77254 0.79792 0.82894 0.21542 0.23497 0.25498(0.15,0.4) 0.54543 0.54601 0.55412 0.31360 0.31753 0.31375(0.2,0.4) 0.58564 0.58874 0.61024 0.29776 0.30371 0.31462
Downloaded By: [Indest open Consortium] At: 08:27 15 October 2009
456 R. C. MITTAL AND R. JIWARI
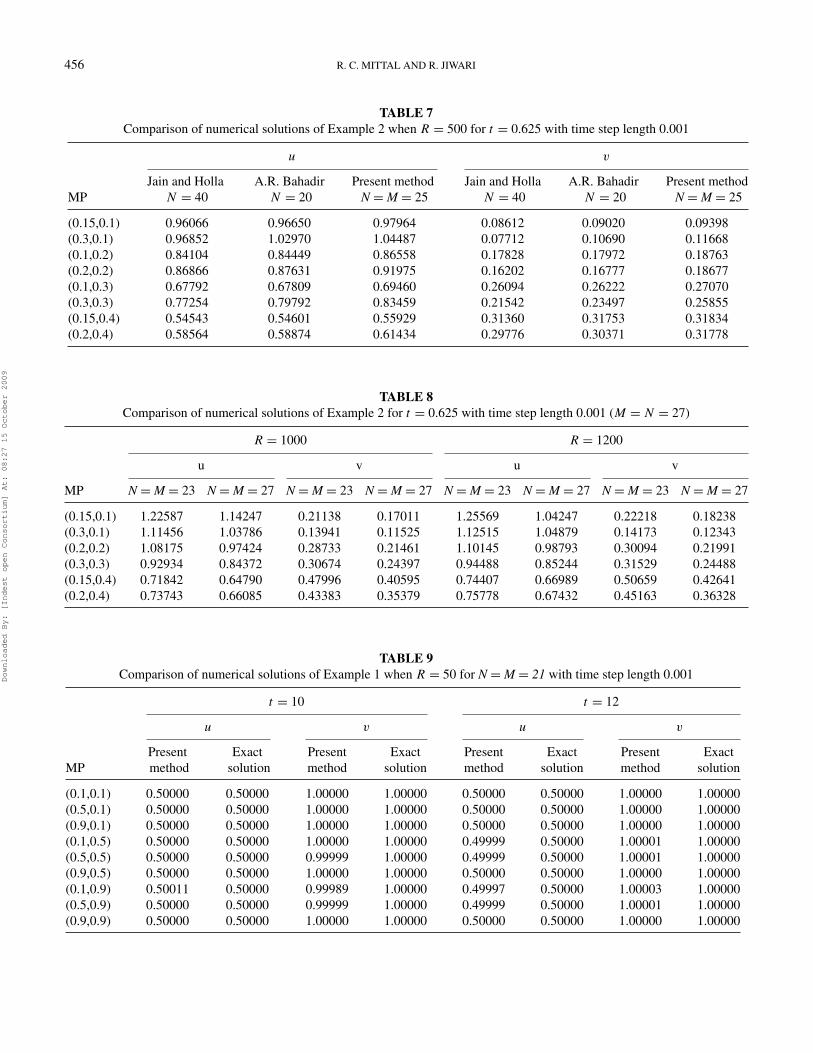
TABLE 7Comparison of numerical solutions of Example 2 when R = 500 for t = 0.625 with time step length 0.001
u v
MPJain and Holla
N = 40A.R. Bahadir
N = 20Present method
N = M = 25Jain and Holla
N = 40A.R. Bahadir
N = 20Present method
N = M = 25
(0.15,0.1) 0.96066 0.96650 0.97964 0.08612 0.09020 0.09398(0.3,0.1) 0.96852 1.02970 1.04487 0.07712 0.10690 0.11668(0.1,0.2) 0.84104 0.84449 0.86558 0.17828 0.17972 0.18763(0.2,0.2) 0.86866 0.87631 0.91975 0.16202 0.16777 0.18677(0.1,0.3) 0.67792 0.67809 0.69460 0.26094 0.26222 0.27070(0.3,0.3) 0.77254 0.79792 0.83459 0.21542 0.23497 0.25855(0.15,0.4) 0.54543 0.54601 0.55929 0.31360 0.31753 0.31834(0.2,0.4) 0.58564 0.58874 0.61434 0.29776 0.30371 0.31778
TABLE 8Comparison of numerical solutions of Example 2 for t = 0.625 with time step length 0.001 (M = N = 27)
R = 1000 R = 1200
u v u v
MP N = M = 23 N = M = 27 N = M = 23 N = M = 27 N = M = 23 N = M = 27 N = M = 23 N = M = 27
(0.15,0.1) 1.22587 1.14247 0.21138 0.17011 1.25569 1.04247 0.22218 0.18238(0.3,0.1) 1.11456 1.03786 0.13941 0.11525 1.12515 1.04879 0.14173 0.12343(0.2,0.2) 1.08175 0.97424 0.28733 0.21461 1.10145 0.98793 0.30094 0.21991(0.3,0.3) 0.92934 0.84372 0.30674 0.24397 0.94488 0.85244 0.31529 0.24488(0.15,0.4) 0.71842 0.64790 0.47996 0.40595 0.74407 0.66989 0.50659 0.42641(0.2,0.4) 0.73743 0.66085 0.43383 0.35379 0.75778 0.67432 0.45163 0.36328
TABLE 9Comparison of numerical solutions of Example 1 when R = 50 for N = M = 21 with time step length 0.001
t = 10 t = 12
u v u v
MPPresentmethod
Exactsolution
Presentmethod
Exactsolution
Presentmethod
Exactsolution
Presentmethod
Exactsolution
(0.1,0.1) 0.50000 0.50000 1.00000 1.00000 0.50000 0.50000 1.00000 1.00000(0.5,0.1) 0.50000 0.50000 1.00000 1.00000 0.50000 0.50000 1.00000 1.00000(0.9,0.1) 0.50000 0.50000 1.00000 1.00000 0.50000 0.50000 1.00000 1.00000(0.1,0.5) 0.50000 0.50000 1.00000 1.00000 0.49999 0.50000 1.00001 1.00000(0.5,0.5) 0.50000 0.50000 0.99999 1.00000 0.49999 0.50000 1.00001 1.00000(0.9,0.5) 0.50000 0.50000 1.00000 1.00000 0.50000 0.50000 1.00000 1.00000(0.1,0.9) 0.50011 0.50000 0.99989 1.00000 0.49997 0.50000 1.00003 1.00000(0.5,0.9) 0.50000 0.50000 0.99999 1.00000 0.49999 0.50000 1.00001 1.00000(0.9,0.9) 0.50000 0.50000 1.00000 1.00000 0.50000 0.50000 1.00000 1.00000
Downloaded By: [Indest open Consortium] At: 08:27 15 October 2009

DQM FOR TWO-DIMENSIONAL BURGERS’ EQUATIONS 457
TABLE 10Convergence and accuracy of numerical solution of Example 1
at (0.3, 0.7) for R = 100 at different grid points
Number of grid points in x and y direction
t 9 × 9 13 × 13 17 × 17 21 × 21 Exact
0.5 u 0.74523 0.74190 0.74222 0.74221 0.74221v 0.75473 0.75810 0.75778 0.75779 0.75779
2.0 u 0.55851 0.55571 0.55543 0.55540 0.55568v 0.94179 0.94429 0.94457 0.94460 0.94432
solving generic transient continuum mechanics problems hav-ing arbitrary domain configuration in [16]. Yang and Zhifeihave extended state-space based differential quadrature methodto study the free vibration of a functionally graded piezoelectricmaterial beam under different boundary conditions in [17]. Oneof the most useful approaches is the one introduced by Quanand Chang [13, 14]. After that, Shu’s [12] general approach,which was inspired by Bellman’s approach, was made availablein the literature. Shu’s recurrence formulation for higher orderderivatives is given by
a(n)ij = n
[ax
ij a(n−1)ii − a
(n−1)ij
xi − xj
]for i �= j (9)
a(n)ii = −
N∑j=1,j �=i
a(n)ij for i = j (10)
n = 2, 3, . . . , N − 1; i, j = 1, 2, . . . , N
b(m)ij = m
[b
y
ij b(n−1)ii − b
(m−1)ij
yi − yj
]for i �= j (11)
b(m)ii = −
M∑j=1,j �=i
b(m)ij for i = j (12)
n = 2, 3, . . . , M − 1; i, j = 1, 2, . . . , M
TABLE 11Convergence and accuracy of numerical solution of Example 2
at (0.2, 0.2) for R = 50 at different grid points
Number of grid points in x and y direction
t 9 × 9 13 × 13 15 × 15 17 × 17
0.5 u 0.90298 0.86712 0.86607 0.86590v 0.19584 0.16975 0.16895 0.16875
2.0 u 0.90315 0.86355 0.86227 0.86212v 0.19465 0.16842 0.16760 0.16746
where axij and b
y
ij are the weighting coefficients of the first orderpartial derivatives of u (x, y, t) with respect to x and y mentionin [12].
Obviously, equations (8), (10), (11) and (12) offer an easyway to compute the weighting coefficients.
3. SOLUTION OF TWO-DIMENSIONAL BURGERS’EQUATIONS
Applying the differential quadrature method to the systemof equations (1)–(6), we get the following system of non-linearordinary differential equations
u′i,j = 1
R
(N∑
k=1
a(2)i,k uk,j +
M∑k=1
b(2)j,kui,k
)− ui,j
N∑k=1
a(1)i,k uk,j
−vi,j
M∑k=1
b(1)j,kui,k (13)
v′i,j = 1
R
(N∑
k=1
a(2)i,k vk,j +
M∑k=1
b(2)j,kvi,k
)− ui,j
N∑k=1
a(1)i,k vk,j
−vi,j
M∑k=1
b(1)j,kvi,k (14)
with initial conditions
u(xi, yj , 0) = φ1(xi, yj ), (xi, yj ) ∈ D (15)
v(xi, yj , 0) = φ2(xi, yj ) (xi, yj ) ∈ D (16)
and boundary conditions
u(xi, yj , t) = f1(xi, yj , t), (xi, yj ) ∈ ∂D, t > 0, (17)
v(xi, yj , t) = f2(xi, yj , t), (xi, yj ) ∈ ∂D, t > 0, (18)
where u′ and v′ denote the derivatives of u and v with respect tot and u(xi, yj , t) is referred as ui,j and a
(1)i,j , a
(2)i,j , b
(1)i,j and b
(2)i,j
are the weighting coefficients of first and second order partialderivatives of u (x, y, t) with respect to x and y.
The system of ordinary differential equations (13)–(18) aresolved by Pike and Roe’s fourth-stage RK4 scheme [10] forthe event that function f contains no explicit dependent on t.
Fung [18] presented a new time integration scheme based onthe differential quadrature method and showed that the schemeis unconditionally stable. The differential quadrature time inte-gration scheme proposed by Fung [18] in 2001 is assessed inLiu and Wang [19]. This scheme also includes the RK4 scheme.
4. NUMERICAL EXPERIMENTS AND DISCUSSIONSIn this section, we apply DQM on two test examples that are
considered by researchers.
Downloaded By: [Indest open Consortium] At: 08:27 15 October 2009

458 R. C. MITTAL AND R. JIWARI
Example 1. We consider two-dimensional Burgers’ equa-tions (1) and (2) with an exact solution generated by using theHopf-Cole transformation [3], which is
u (x, y, t) = 3
4− 1
4(1 + e
R(4y−4x−t)32
) (19)
v (x, y, t) = 3
4+ 1
4(1 + e
R(4y−4x−t)32
) . (20)
The boundary and initial conditions are taken from exact so-lutions (19) and (20) and the computational domain for this prob-lem is D = {(x, y) : 0 ≤ x ≤ 1, 0 ≤ y ≤ 1}. The numericalresults are computed by using Chebyshev-Gauss-Lobatto gridpoints given by equations (24) and time step length �t = 10−3.The numerical and exact values of u and v at some mesh points(MP) for R = 100 at time levels t = 0.01, 0.5 and 2.0 are re-ported in Tables 1, 2, and 3, while Table 4 shows results for R =1000 at time levels 0.5 and 2.0. The tables show that the presentmethod gives much better results in comparison to methods sug-gested by other researchers. Moreover, we are able to computesolutions for R = 1000 that are not reported in the literature.Also, the concentration profiles of u computed at time from t =1 to t = 15 are depicted in Figure 1. It is clear from Figure 1 thatthe numerical method is stable.
Example 2. Consider the two-dimensional Burgers’ equa-tions (1) and (2) with the computational domainD = {(x, y) : 0 ≤ x ≤ 0.5, 0 ≤ y ≤ 0.5}. In this problem, theinitial conditions are
u (x, y, 0) = sin(πx) + cos(π y)
v (x, y, 0) = x + y (21)
and boundary conditions are
u (0, y, t) = cos(πy), u (0.5, y, t) = 1 + cos(πy)
(0, y, t) = y v (0.5, y, t) = 0.5 + y; 0 ≤ y ≤ 0.5, t ≥ 0
(22)
u (x, 0, t) = 1 + sin(πx), u (x, 0.5, t) = sin(πx)
v (x, 0, t) = x v (x, 0.5, t) = x + 0.5 0 ≤ x ≤ 0.5, t ≥ 0
(23)
The numerical experiments are performed by usingChebyshev-Gauss-Lobatto grid points. We have computed thenumerical solutions for R = 50, 500, 1000 and 1200 at t =0.625 with time step length �t = 10−3and �t = 5×10−4. Theresults are given in Tables 5–9 at selected mesh points (MP). Theobtained results demonstrate that the present scheme achievedsimilar results as those of Jain and Holla [4] and Bahadir [8] forR = 50 and 500. Moreover, we could get solutions for Reynoldsnumber R = 1200. Also, the concentration profiles of u and v
computed at different time are depicted in Figure 2. It is clearfrom Figure 2 that the numerical method is stable.
After the experiments, it is concluded that if the large value ofthe Reynolds number is used then one has to increase the numberof grid points. It is also seen that, in general, the odd number ofgrid points gives better results. Also, we found that Chebyshev-Gauss-Lobatto grid points give better results in comparison touniform grid points.
5. CONVERGENCE AND SELECTION OF GRID POINTSThe stability of the DQM applied depends on the eigen values
of differential quadrature discretization matrices. These eigenvalues in turn very much depend on the distribution of gridpoints. It has been shown by Shu [12] in his book that the uniformgrid points distribution does not give stable solution, which wehave also noticed in our numerical experiments. According toShu the stable solution can be obtained when Chebyshev-Gauss-Lobatto grid points are chosen. The Chebyshev-Gauss-Lobattogrid points are given by
xi = 1
2
(1 − cos
((i − 1) π)
N − 1
)Lx
yj = 1
2
(1 − cos
((j − 1) π )
M − 1
)Ly i = 1, 2, . . . , N ;
j = 1, 2, . . . ,M (24)
where Lx and Ly are the rectangular domain length along x-axisand y-axis, respectively.
The convergence of the present approach is demonstratedby Tables 10–11. The tables show that as soon as grid pointsincrease, we get stable solutions. The figures also show thestable solutions.
6. CONCLUSIONIn this paper, a differential quadrature method is applied for
the solution of the two-dimensional Burgers’ equations. Themethod is simple and straightforward, which gives a system ofordinary differential equations. The resulting system of ordinarydifferential equations is solved by a fourth stage RK4 method.The method is applied on two test problems given in the liter-ature and discussed by a number of researchers. The accuracyof the method depends on the number of grid points chosen forDQM and the O.D.E. solver used to find the solution of result-ing system of O.D.E. As suggested by Shu [12], uniform gridpoints do not produce stable results. However, a stable result isobtained when Chebyshev-Gauss-Lobatto grid points are taken.It may be noted that the time step taken in our computations islarger than considered by other researchers; still we are able toget better or the same results even for higher Reynolds numbers.The strength of the method lies in its easiness to apply.
REFERENCES1. J. M. Burger, A Mathematical Model Illustrating the Theory of Turbulence,
Adv. Appl. Mech., vol. I, pp. 171–199, 1948.
Downloaded By: [Indest open Consortium] At: 08:27 15 October 2009

DQM FOR TWO-DIMENSIONAL BURGERS’ EQUATIONS 459
2. J. D. Cole, On a Quasilinear Parabolic Equations Occurring in Aerodynam-ics, Quart. Appl. Math., vol. 9, pp. 225–236, 1951.
3. C. A. J. Fletcher, Generating Exact Solution of the Two-dimensional Burg-ers’ Equation, Int. J. Numer. Meth. Fluids, vol.3, pp. 213–216, 1983.
4. P. C. Jain, D. N. Holla, Numerical Solution of Coupled Burgers’ Equations,Int. J. Non-Linear Mechanics, vol. 13, pp. 213–222, 1978.
5. C. A. J. Fletcher, A Comparison of Finite Element and Finite DifferenceSolution of the One and Two-dimensional Burgers’ Equations, J. Comput.Phys., vol. 51, pp. 159–188, 1983.
6. O. Goyon, Multilevel Schemes for Solving Unsteady Equations, Int. J.Numer. Meth. Fluids, vol. 22, pp. 937–959, 1996.
7. F. W. Wubs, E. D. de Goede, An Explicit-implicit Method for a Class ofTime-dependent Partial Differential Equations, Appl. Numer. Math., vol. 9,pp. 157–181, 1992.
8. A. Bahadir, A Fully Implicit Finite-difference Scheme for Two-dimensionalBurgers’ Equations, Appl. Math. Comput., vol. 137, pp. 131–137, 2003.
9. M. Salah EI-Sayed, Dogan Kaya, On the Numerical Solution of the Systemof Two-dimensional Burgers’ Equations by Decomposition Method, Appl.Math. Comput., vol. 158 pp. 101–109, 2004.
10. J. Pike, PL. Roe, Accelerated Convergence of Jameson’s Finite VolumeEuler Scheme Using Van Der Houwen Integrators, Comput. Fluids, vol. 13,pp. 223–236, 1985.
11. R. Bellman, B. G. Kashef and J. Casti, Differential Quadrature: A Tech-nique for the Rapid Solution of Nonlinear Partial Differential Equations, J.Comput. Phys, vol. 10, pp. 40–52, 1972.
12. Chang Shu, Differential Quadrature and its Application in Engineering,Springer-Verlag London Ltd., 2000.
13. J. R. Quan, C. T. Chang, New Insights in Solving Distributed SystemEquations by the Quadrature Methods-I, Comput Chem Engrg, vol. 13, pp.779–788, 1989.
14. J.R. Quan, C.T. Chang, New Insights in Solving Distributed System Equa-tions by the Quadrature Methods-II, Comput Chem Engrg, vol. 13, pp.1017–1024, 1989.
15. A. N. Boules, and I. J. Eick, A Spectral Approximation of the Two Dimen-sional Burgers’ Equation, Indian J. Pure Appl. Math., vol. 34, pp. 299–309,2003.
16. C. N. Chen, Transient Response Analyses by Extended Generic Differ-ential Quadratures Based Discrete Element Analysis Methods and TimeIntegration Schemes, Comp. Fluid and Solid Mechanics, pp. 1887–1891,2003.
17. L. Yang and S. Zhifei, Free Vibration of a Functionally Graded PiezoelectricBeam via State-space Based Differential Quadrature, Composite Structures,vol. 87, pp. 257–264, 2009.
18. T. C. Fung, Solving Initial Value Problem by Differential QuadratureMethod-Part 1: First-order Equations, International Journal for NumericalMethods in Engineering, vol. 50, pp. 1411–1427, 2001.
19. J. Liu and X. Wang, An Assessment of the Differential Quadrature TimeIntegration Scheme for Nonlinear Dynamic Equations, Journal of Soundand Vibration, vol. 314, pp. 246–253, 2008.
APPENDIX1. Consider the ordinary differential equation of the form
dY
dt= f (Y ) ,
with given initial condition Y (0).Pike and Roe [10] present the following four-stage RK4
scheme for the event when f is independent of t.
{Y = Yn
G = f (Y )(1)
{Y = Y + �t
4.G
G = f (Y )(2)
{Y = Y + �t
3.G
G = f (Y )(3)
{Y = Y + �t
2.G
G = f (Y )(4)
Yn+1 = Y + �t.G (5)
Downloaded By: [Indest open Consortium] At: 08:27 15 October 2009
Copyright © 2022 FDOKUMEN




















