Estimation of PAR over Northern China from Daily NOAA AVHRR Cloud Cover Classifications

www.elsevier.com/locate/rse
Remote Sensing of Environ
Comparison of evaporative fractions estimated from AVHRR and
MODIS sensors over South Florida
Virginia Venturinia, Gautam Bishta, Shafiqul Islama,*, Le Jiangb
aDepartment of Civil and Environmental Engineering, University of Cincinnati, 765 Baldwin Hall, Mail Location 210071, P.O. Box 210071,
Cincinnati, OH 45221-0071, United StatesbIMSG at NOAA/NESDIS, NOAA Science Center, Camp Springs, MD 20746, USA
Received 25 March 2004; received in revised form 15 June 2004; accepted 26 June 2004
Abstract
Remote sensing cannot provide a direct measurement of evapotranspiration (ET) but it can provide a reasonably good estimate of
Evaporative Fraction (EF), defined as the ratio of ET and available energy. Recent studies have successfully estimated EF using a contextual
interpretation of radiometric surface temperature (T0) and normalized difference vegetation index (NDVI) such as from the Advanced Very
High Resolution Radiometer (AVHRR) onboard NOAA-14 satellite. To provide a continuous monitoring capability for EF, it is important to
explore the utility of such an approach to recently launched sensors with better spectral resolution. Here, we explore the utility of Moderate
Resolution Imaging Spectroradiometer (MODIS), onboard EOS Terra satellite, sensors to estimate EF over large areas. We compare and
contrast EF estimates from AVHRR and MODIS sensors over South Florida. We also explore the sensitivity of NDVI and T0 to sensor
response functions (SRFs) and atmospheric variables. Our results show that NDVI–T0 space, when using T0 from a single channel derived
temperature, is affected by the SRFs and overpass times. Despite differences in NDVI and T0 estimates from AVHRR and MODIS sensors, it
appears that they capture similar contextual information of energy partitioning and the EF estimates are comparable. Our results suggest that
the proposed EF estimation is relatively insensitive to changes in absolute values of T0, induced by local atmospheric conditions and sensor
viewing angles, and EF is primarily determined by the overall contextual space of NDVI–T0 diagram.
D 2004 Elsevier Inc. All rights reserved.
Keywords: Evaporative fractions; AVHRR; MODIS
1. Introduction
Many agricultural, water resources and forest manage-
ment applications require the knowledge of ET over a range
of spatial and temporal scales. Satellite remote sensing
provides an unprecedented spatial coverage of critical land
surface and atmospheric data that are logistically and
economically impossible to obtain through ground-based
observation networks. Remote sensing, however, cannot
readily measure variables like wind speed, air temperature
and vapor pressure that are needed to estimate ET over large
heterogeneous areas. Several studies have attempted to
0034-4257/$ - see front matter D 2004 Elsevier Inc. All rights reserved.
doi:10.1016/j.rse.2004.06.020
* Corresponding author.
E-mail address: [email protected] (S. Islam).
estimate ET over large areas using a combination of remote
sensing observations and ancillary surface and atmospheric
data (e.g., Bastiaanssen et al., 1996; Jackson et al., 1977;
Holwill & Stewart, 1992; Moran et al., 1994; Nishida et al.,
2003; Norman et al., 2003; Seguin et al., 1989). In making
these calculations, it is necessary to make several assump-
tions about the extrapolation of atmospheric variables and
resistance terms from the measurement points to other pixels
(Beven & Fisher, 1996).
Recently, Jiang and Islam (2001) have proposed a direct
estimation of evaporative fraction (EF), defined as the ratio
of ET and available energy, using remotely sensed
vegetation index and temperature. This method makes fewer
assumptions and reduces the complexity of ET estimation
over large heterogeneous areas. A key feature of this model
is that it takes established methods and integrates those in a
ment 93 (2004) 77–86

V. Venturini et al. / Remote Sensing of Environment 93 (2004) 77–8678
unique and relatively simple fashion. It derives spatially
distributed EF by using a contextual interpretation of a
relationship between easily measured surface variables—
radiometric surface temperature (T0) and normalized differ-
ence vegetation index (NDVI). A key advantage of using a
contextual formulation is that it holds true for a wide of
range of surface conditions and possibly valid over a wide
range of pixel scales. It uses spatial context (i.e., spatial
variation of collocated surface processes) from satellite
images to estimate EF with minimum number of free
parameters and ancillary data.
Another key advantage of this method is that absolute
high accuracy in land surface temperature is not required to
obtain EF. It has been shown (Islam et al., 2002, 2003; Jiang
& Islam, 2001) that a single channel T0, so long as it is
scaled, is content to extract values of EF in conjunction with
the triangle method.
This model has been shown to work well with remotely
sensed data from AVHRR sensors onboard NOAA-14
(Islam et al., 2002, 2003; Jiang & Islam, 2001). Over the
last several years, new sensors with better resolution and
improved spectral response functions became operational. It
would be beneficial to provide a continuous monitoring
capability of EF by extending the methodology to other
sensors such as newer AVHRR sensors or MODIS
channels. There are important differences in AVHRR and
MODIS visible, near infrared (NIR) and thermal infrared
(TIR) channels and response functions (Huete et al., 2002;
Justice et al., 2002; Trishchenko et al., 2002; Wan &
Dozier, 1996). Consequently, it is expected that NDVI and
T0 estimated from AVHRR and MODIS sensors would be
different. A key question we want to address here is dHowdoes the EF estimate differ from AVHRR and MODIS
sensors?T We will compare and contrast estimates of EF
from AVHRR and MODIS sensors over South Florida. In
this paper we aim to further explore the sensitivity of
NDVI–T0 contextual spaces and EF estimates to sensor
characteristics. We will also investigate the effects of
atmospheric conditions by comparing EF values derived
from a single channel temperature (MODIS-T31) without
atmospheric corrections, and from MODIS land surface
temperature (TS) product, which account for atmospheric
and viewing angle corrections.
Table 1
AVHRR-3 on NOAA-14 and MODIS sensor characteristics
AVHRR M
Channel name Band # Band width (Am) Spatial resolution (m) C
Red Band 1 0.580–0.680 1090 R
NIR Band 2 0.725–1.100 1090 N
Thermal IR Band 4 10.30–11.30 1090 T
Thermal IR Band 5 11.41–12.38 1090 T
NETDb 0.12 K N
Radiometric resolution 10 bits R
a Original band spatial resolution. MOD021KM provides the integrated digitb NETD: Thermal IR-Noise Equivalent temperature difference.
2. AVHRR and MODIS sensors: an overview
Among various satellite sensors, AVHRR, onboard
NOAA polar orbiting satellites, has one of the longest
records for research and applications. It provides NDVI and
T0 data for over 20 years (Gleason et al., 2002; Myneni et
al., 1995; Price, 1983; Trishchenko et al., 2002; Sobrino et
al., 1991; Verstraete & Pinty, 1996). They have also
provided the foundations for a new generation of sensing
systems such as MODIS, onboard Earth Observing System
(EOS) Terra satellite launched in December 1999. MODIS
instrument has higher number of bands and better radio-
metric resolution than AVHRR sensor and provides new
opportunities to monitor surface status over large areas.
The AVHRR on board NOAA-14, operational since
1995, has five channels including red, infrared, and thermal
part of the spectrum. AVHRR images cover large areas and
provide acquisition of two images per day with a resolution
of approximately 1000 m. All five channels of AVHRR
have been used to characterize different land surface
attributes. For example, Channels 1 and 2 may be used to
estimate normalized difference vegetation index while
channels 4 and 5 may be used to estimate surface temper-
ature. The first EOS satellite, Terra, was launched on
December 18, 1999 with MODIS as one of the five sensors
onboard. It has 36 spectral bands between 0.405 and 14.385
Am whose spatial resolutions range is from 250 to 500 and
1000 m.
Table 1 displays the sensor characteristics for AVHRR
and MODIS. Note that we only listed band names, number,
bandwidths and spatial resolution of the four channels used
in this study.
MODIS and AVHRR on board NOAA-14 (hereafter
AVHRR) spectral response function (SRF) for channels in
visible, NIR and TIR wavelengths differ in shape, band-
width and central wavelengths. AVHRR visible and NIR
spectral reflectances are substantially distinct from MODIS
reflectances. For instance, Trishchenko et al. (2002)
reported differences between MODIS and AVHRR visible
(20–30%) and NIR (10–15%) reflectances that cause NDVI
estimates to differ up to 25%, for the same surfaces and
standard atmospheric conditions. Differences due to atmos-
pheric variables (e.g., water vapor, aerosol optical depth and
ODIS
hannel name Band # Band width (Am) Spatial resolution (m)
ed Band 1 0.620–0.670 250a
IR Band 2 0.841–0.876 250a
hermal IR Band 31 10.78–11.28 1090
hermal IR Band 32 11.70–12.27 1090
ETD 0.05 K
adiometric resolution 12 bits
al numbers at 1090 m.

V. Venturini et al. / Remote Sensing of Environment 93 (2004) 77–86 79
ozone amount) seem to be less significant than those due to
SRF characteristics. Huete et al. (2002) reported similar
differences between MODIS- and AVHRR-NDVI estimates,
although both NDVI products mimic the vegetation
seasonal cycle well.
The radiometric brightness temperature in the TIR
window, ranging from 8 to 12 Am, is affected by SRF
characteristics, viewing angles and atmospheric conditions.
Thus, differences between MODIS and AVHRR TIR
radiances may be expected since the quality of the TIR
data depends on the sensor radiometric resolutions, SRF and
signal-to-noise ratio, displayed in Table 1.
MODIS science team has developed a global product for
retrieving TS. Hence, the so-called MOD11 product contains
TS and band emissivities (for bands 31 and 32) at spatial
resolutions of 1 and 5 km for clear sky days on daily base.
The generalized split window method is used to calculate TS
for those pixels, whose emissivities are known in bands 31
and 32 (Wan & Dozier, 1996). The physics-based day/night
land surface temperature algorithm is used to retrieve TS at 5
km (Wan & Li, 1997).
Fig. 1. South Florida water management district.
3. Estimation of EF using remote sensing
Jiang and Islam’s (2001) model for EF is based on the
existence of a physically meaningful relationship between
EF and remotely detectable spatial parameters, such as
NDVI and T0. For realistic heterogeneous land surface
conditions, the combination of parameters (NDVI, T0) is
expected to reveal important thermodynamic and physical
information. Previous studies (Carlson & Ripley, 1997;
Carlson et al., 1995; Price, 1990; Gillies et al., 1997; Jiang
& Islam, 1999) have shown that T0 and NDVI exhibit a
characteristic triangular pattern whose boundaries constitute
limiting conditions for the surface fluxes.
Jiang and Islam’s (2001) approach is based on a
modification of the Triangle Method (Gillies & Carlson,
1995; Gillies et al., 1997), so-called because of the
triangular distribution of pixels customarily observed when
the data is plotted in surface radiant temperature–vegetation
index space. Most of the discussion related to the triangle
bounds has focused on the warm edge of the pixel
distribution, so called because the highest surface temper-
atures tend to exhibit a well-defined boundary over a range
of vegetation amounts. Jiang and Islam (2001) assumed that
the pixels along the warm edge represent minimum
evaporation for the bare soil component of a pixel in each
vegetation class, while actual magnitude of evaporation can
vary for different vegetation classes. Then, EF is estimated
by simple linear interpolation between the sides of the
triangle. It has been proposed by Moran et al. (1994) that the
interior of the triangle scales linearly with respect to the
surface turbulent energy fluxes, who also referred to the
pixel envelope as a trapezoid. Such an interpretation of T0–
NDVI relationship provides a basis to obtain EF for each of
the pixel in an image. For a detailed description of EF and
ET estimation we refer to Jiang and Islam (2001).
4. Study area and data
Our study area is the South Florida Water Management
District (SFWMD) which is extended between longitude
82.325W to 79.942W and latitude 24.369N to 28.564N. Fig.
1 depicts SFWMD domain. This area is characterized by a
variety of land covers such as residential, pasture, brush,
woods, grassland, swamps, sea grass and open water among
others classes. Summers throughout the state are long,
warm, and relatively humid. Winters are mild with periodic
invasions of cool to occasionally cold air. The annual
average temperature is about 294 K.
The data set for this study consists of pairs of MODIS
Level 1B products and NOAA-14 Level 1B High-Reso-
lution Picture Transmission (HRPT) data. We used MODIS
MOD021KM product since it provides calibrated digital
numbers for each band at 1.09-km spatial resolution. Note
that Table 1 displays the original spatial resolution of
MODIS red and NIR bands. Besides the channel digital
number, the geolocation, i.e., latitude, longitude and view-
ing angle, of each pixel are also available. NOAA-14
overpasses the South Florida during daytime at about 2200
UTC (5:00 pm local time) in 2001 while EOS-Terra does it
at about 1600 UTC (11:00 am local time).
Pairs of daytime images for 6 days in year 2001 were
selected mainly according to the following criteria: the study
area presents clear sky at NOAA-14 and MODIS overpass
times (March 8th, April 1st, April 2nd and April 3rd). Clear
sky condition was characterized as larger than 85% of the

Table 2
AVHRR and MODIS image information
Julian
day
Date Satellite
name
Overpass
time (UTC)
Image
quality
Mean
viewing
angle (8)
JD67 March 8th AVHRR 2116–2130 Clear 58.69
MODIS 1545–1550 Clear 53.94
JD81 March 22nd AVHRR 2203–2217 Few
clouds
63.09
MODIS 1555–1600 Few
clouds
33.72
JD91 April 1st AVHRR 2144–2158 Clear 58.40
MODIS 1635–1640 Clear 29.87
JD92 April 2nd AVHRR 2131–2145 Clear 56.87
MODIS 1540–1545 Clear 59.11
JD93 April 3rd AVHRR 2119–2133 Clear 53.88
MODIS 1620–1630 Clear 7.04
JD274 October 1st AVHRR 2214–2231 Partially
Cloudy
68.72
MODIS 1635–1641 Partially
Cloudy
39.06
Table 4
Comparison between AVHRR-NDVI and MODIS-NDVI
RMSE Bias R2
JD67 0.216 0.198 0.892
JD81 0.194 0.178 0.855
JD91 0.193 0.171 0.907
JD92 0.198 0.171 0.912
JD93 0.263 0.235 0.906
JD274 0.350 0.323 0.771
V. Venturini et al. / Remote Sensing of Environment 93 (2004) 77–8680
study area being clear. Although at times clouds are present
over the same areas, NOAA-14 and MODIS images may
present cloudy pixel located in different areas suggesting
that the atmospheric conditions changed during the daytime.
Table 2 summarizes the image information (Julian day, date,
satellite overpass time, image quality and mean viewing
angle). The SFWMD domain is divided into 265 columns
by 466 rows with an approximate pixel resolution of 1.0 km.
NDVI values are computed after the digital counts of red
and NIR channels were converted to reflectance. Channel 4
(from AVHRR) and 31 (from MODIS) radiances were
calculated to compute T4 and T31. Then a simple cloud
masking threshold (T0b273 K) was applied to remove cloudy
pixels. In this study, we also use MODIS TS data product at
1-km spatial resolution to investigate the sensitivity of EF
estimates to single channel temperature (T31 for MODIS).
5. Comparison between NDVI and T0 derived from
AVHRR and MODIS sensors
5.1. Comparison between AVHRR-NDVI and MODIS-NDVI
Table 3 displays the NDVI mean, maximum, minimum
and standard deviation (r) derived from AVHRR and
Table 3
AVHRR- and MODIS-NDVI mean, maximum, minimum and standard deviation
AVHRR
Mean Max. Min r
JD67 0.178 0.514 0.0000 0.109
JD81 0.209 0.540 0.0000 0.114
JD91 0.308 0.619 0.0008 0.096
JD92 0.296 0.587 0.0003 0.093
JD93 0.230 0.496 0.0002 0.081
JD274 0.160 0.410 0.0000 0.099
MODIS images for the 6 days. MODIS-NDVI means are
up to 23% larger than those from AVHRR, while maximum
MODIS-NDVI can be 30% larger than AVHRR maximum
NDVI values. Similar results were reported by Trishchenko
et al. (2002).
We summarize the root mean square errors (RMSE), bias
and correlation coefficient (R2) derived from MODIS-NDVI
and AVHRR-NDVI in Table 4. In general, RMSEs and bias
values are approximately 0.2, which represents 30% of this
maximum NDVI values reported in Table 3. These values
are comparable to those reported in literature (Huete et al.,
2002; Trishchenko et al., 2002). These differences are
attributed mainly to the SRFs (not shown here). In fact,
MODIS red and NIR channels are narrower than those of
AVHRR. AVHRR red and NIR bands overlap at wave-
lengths 0.68–0.7 Am, right where the chlorophyll absorption
band is located, while MODIS red band is clearly separated
from the NIR band. Bandwidth superposition, as it is
observed in AVHRR bands, contaminates the red channel
reflectance, and causes NDVI values significantly decrease.
Atmospheric variables, such as water vapor and ozone
content, may also contribute to the discrepancies observed;
however, they are less important than the SRFs effects,
(Huete et al., 2002; Trishchenko et al., 2002). In general, R2
(0.85–0.91) indicates good agreements between the sensors,
for all the days examined here.
5.2. Comparison between AVHRR-T4 and MODIS-T31
Table 5 shows that the mean T4 and T31 are comparable.
T31 maximum and minimum temperatures and standard
deviations are, however, larger than those of T4. Table 6
compares and contrasts T4 and T31 in terms RMSE, bias,
and R2. RMSE values are in between 2 and 5 K and biases
are less than 1 K except for JD93. R2 values range from 0.1
(r)
MODIS
Mean Max. Min r
0.333 0.675 0.0006 0.242
0.346 0.745 0.0002 0.239
0.474 0.796 0.0001 0.102
0.457 0.691 0.0002 0.085
0.458 0.796 0.0000 0.107
0.383 0.734 0.0000 0.225

Table 5
AVHRR channel 4 and MODIS channel 31 mean, maximum, minimum and standard deviation (r)
AVHRR-T4 (K) MODIS-T31 (K)
Mean Max. Min r Mean Max. Min r
JD67 294.81 302.59 285.95 2.05 295.29 307.88 285.78 3.47
JD81 293.54 299.21 287.89 1.24 294.45 305.48 278.33 4.65
JD91 297.44 303.60 292.62 1.22 298.71 305.62 291.99 2.15
JD92 297.48 303.24 277.37 1.69 297.74 303.13 289.20 2.34
JD93 298.34 302.87 282.55 1.69 302.70 313.76 292.20 3.61
JD274 294.15 298.89 277.02 2.66 294.35 302.54 273.16 3.37
V. Venturini et al. / Remote Sensing of Environment 93 (2004) 77–86 81
to 0.7. We note that the EOS-Terra and NOAA-14 overpass
times have a difference of about 4–5 h. Such a difference in
the overpass time may cause T4 and T31 to differ by 3–5 K
for clear sky conditions (Santanello & Friedl, 2003).
MODIS image for JD93 is at 78 off-nadir while AVHRR
image, for the same day, is at 548 off-nadir (Table 2). This
may explain the large bias and RMSE for JD93 (Table 6).
6. Analysis of EF estimates
EF may be defined as follows:
EF ¼ LE
Rn � Gð Þ ¼ /D
D þ c
��ð1Þ
where LE is the latent heat flux, / combines the effects of
Priestley–Taylor’s parameters a and Budyko–Thornwaite–
Mather’s wetness parameter (Jiang & Islam, 2001), Rn is the
net radiation, G is the soil heat flux, D is the slope of
saturated vapor pressure at the air temperature and c is the
psychrometric constant.
The Triangle Method (Section 3) is applied to derive /while D is estimated from air temperature (Ta) data. In this
work, we use the same source of Ta for calculation of D in
AVHRR and MODIS derived / values. Previous work
showed that D, though dependent on Ta, is not highly
sensitive to Ta (Jiang et al., 2003). In practice, use of
remotely sensed domain mean surface temperature, or
remotely sensed average inland water surface temperature
within the image scene would be sufficient to determine the
magnitude of D. Thus, a comparison of EF or / for AVHRR
and MODIS would provide similar insight, although EF can
be more easily interpreted by general readers.
Table 6
Comparison between AVHRR-T4 and MODIS-T31
RMSE (K) Bias (K) R2
JD67 2.801 0.548 0.616
JD81 4.144 0.877 0.662
JD91 2.323 1.271 0.445
JD92 2.420 0.337 0.331
JD93 5.390 4.368 0.499
JD274 4.071 �0.023 0.096
6.1. Comparison between EF estimated from AVHRR and
MODIS triangular spaces
In order to calculate EF, we first derive the warm edge of
the triangular space from AVHRR–NDVI–T4 and MODIS–
NDVI–T31. Fig. 2 displays the triangular space for 2 days:
(a) JD67 and (b) JD93. As discussed in Section 4, MODIS
and AVHRR sensors yield different NDVI–T0 scatter plots.
The pixel distributions within the triangular space change
from one sensor to the other for all days. Overall, MODIS-
NDVI is larger than AVHRR-NDVI; thus, pixels in NDVI–
T31 scatter plot are displaced about +0.2 units in the NDVI
axis. NDVI–T31 plots also spread out in the T0-axis,
resulting in steeper warm edges for MODIS. Yet, a
triangular shape is observed in all of the plots and for all
the days examined here, indicating that the contextual
relationship between NDVI and TS is captured by both
sensors.
Table 7 compares AVHRR-/ and MODIS-/, in terms
of mean, maximum, minimum and standard deviation (r)./ values estimated from AVHRR and MODIS have
differences of F0.08 in mean while r values are similar
for both. The RMSEs, displayed in Table 8, vary from
0.08 to 0.19. / displays a moderate to poor correlation
between both sensors, with R2 ranging from 0.4 to 0.7.
Despite the SRFs differences and different estimates of
NDVI and T0 presented earlier, / estimates seem to be
comparable in term of RMSE and bias. Fig. 3 compares
AVHRR-/ and MODIS-/, for the same days shown in
Fig. 2. There appears to be good agreement between /estimates from both sensors resulting in moderate scatter-
ing for both days.
To evaluate the similarities and differences of /estimates at smaller scales than the entire SFWMD domain,
now we look at windows of 36 pixels (6�6 pixels). This 36-
pixel window is moved around the study area in every /image derived from both sensors and for all case days. Thus,
a localized comparison, in addition to the global analysis for
the entire domain, is done for a better interpretation of the
comparison metrics used in this work. This moving window
is positioned in 10 different places within SFWMD on each
pair of MODIS-/ and AVHRR-/ maps, then RMSE, bias
and R2 are calculated. Our results show that R2 values run
from �0.74 to 0.92 and about 50% of them are above 0.5.
The maximum and minimum absolute RMSEs estimated are

Fig. 2. AVHRR and MODIS NDVI–T0 scatter plots. For Julian day 67 (a) AVHRR and (b) MODIS. For Julian day 93 (c) AVHRR and (d) MODIS.
V. Venturini et al. / Remote Sensing of Environment 93 (2004) 77–8682
0.28 and 0.045, respectively, while the maximum bias is
0.195. These results are shown in Fig. 4, where MODIS-/and AVHRR-/ are provided. Fig. 4a displays a very poor
R2 and very good RMSE and bias. Fig. 4b exhibits good R2
and similar values of RMSE and bias, while Fig. 4c shows
very good R2, RMSE and bias. These scatter plots indicate a
good agreement between / estimates, regardless of R2
values. This detailed analysis suggests that R2, by itself,
does not explain the relationship between AVHRR and
MODIS / estimates.
Table 7
/ mean, maximum, minimum and standard deviation (r) from AVHRR and MO
AVHRR
Mean Max. Min r
JD67 1.105 1.260 0.789 0.084
JD81 1.077 1.260 0.569 0.113
JD91 1.049 1.260 0.368 0.136
JD92 1.018 1.260 0.499 0.136
JD93 0.960 1.260 0.569 0.151
JD274 0.989 1.260 0.399 0.175
In this study, D is estimated using the same air temper-
ature values for AVHRR and MODIS; thus, we can extend
the results of / comparison to those of EF. For instance,
Islam et al. (2003) obtained EF values over South Florida
from AVHRR data as well as from ground measurements for
1998 and 1999. Their results for clear sky days show
RMSEs and biases varying from 0.12 to 0.2 and from �0.05
to 0.14, respectively. It is encouraging to note that RMSEs
and biases in / estimated from AVHRR and MODIS
sensors are comparable to those of Islam et al. (2003).
DIS
MODIS
Mean Max. Min r
1.090 1.260 0.648 0.106
1.005 1.260 0.633 0.125
1.132 1.260 0.721 0.084
1.067 1.260 0.772 0.104
1.020 1.260 0.569 0.129
0.919 1.260 0.477 0.160

Table 8
Comparison between AVHRR-/ and MODIS-/
RMSE Bias R2
JD67 0.081 �0.015 0.677
JD81 0.109 �0.069 0.768
JD91 0.147 0.088 0.518
JD92 0.133 0.046 0.486
JD93 0.137 0.062 0.605
JD274 0.188 �0.055 0.442
V. Venturini et al. / Remote Sensing of Environment 93 (2004) 77–86 83
6.2. Comparison of / estimated from MODIS-T31 and TS
product
One of the main criticisms of using one channel
brightness temperature approach to estimate T0, is that it
is affected by atmospheric variables and viewing angles
(Price, 1983; Wan & Dozier, 1996). Although the TIR bands
allocated in the 10–12 Am window are transparent to
radiation, water vapor absorption is likely to produce error.
It may cause the brightness temperature to differ from the
actual surface temperature by 5–10 K (Price, 1983).
Correcting remotely sensed data, such as brightness
temperature, by atmospheric profiles for a number of
important variables are necessary when remote sensing data
are required to provide equivalence or substitute for those
traditionally detected by ground-based measurement. In
practice, this poses tremendous challenge to the remote
sensing community in their effort to incorporate different
correction procedures that account for atmospheric attenu-
ation effects. These procedures are often troublesome and
uncertain in nature by themselves given the amount of
independent observation data sources and the accuracy of
the data they require to satisfy the physical and mathemat-
ical constraints. A number of key assumptions are often
required to be made regarding the stability of atmospheric
condition or mean atmospheric status. The correction
procedures often increase the operational difficulty due to
these limitations, and they are only feasible at centralized
Fig. 3. Comparison between AVHRR-/ and MODIS-
operational agencies (e.g., NOAA or NASA) that have, over
the decades, established sophisticated and streamlined
automatic data processing for a number of different data
sources. The comparison study in this paper implies that for
applications that rely on contextual information from remote
sensing, such lengthy and complex corrections to remote
sensing data may not be necessary. Consequently, data
interdependency can be reduced to a minimum level to ease
the overhead of experimentally and operationally utilizing
remote sensing data by a broader science and application
community. In this regard, contextual information based
approaches should be explored to a larger extent for future
remote sensing applications.
In order to investigate the effect of atmospheric
conditions in T0 and EF estimates, we first contrast MODIS
T31 without atmospheric corrections (as described in
Section 4) and MODIS TS product. Then, we derive
MODIS-/ derived from these two temperatures. We
performed these comparisons for four clear sky days:
JD67, JD91, JD92 and JD93, given that MODIS TS product
is not available for cloudy days.
Table 9 gives the results of contrasting T31 and MODIS
TS product (RMSEs, biases, R2 and maximum differences).
The maximum RMSE and bias are about 3.52 and 3.14 K,
respectively, while the maximum difference between TS and
T31 is 10.6 K. These differences between T0 and TS agree
with those reported by Sobrino et al. (1991) for tropical
atmospheres. We must note, however, R2 values are very
high for the days considered here. Based on these results
one may speculate that, although T31 may not accurately
represent actual surface temperature, their correspondence
with TS is very high.
To obtain the triangular spaces, TS were plotted against
MODIS-NDVI. TS is computed from the generalized split-
window methods as a linear combination of T31 and T32.
Note that when T31 and T32 are positively related and
linearly combined with all positive coefficients to obtain TS,
a pixel’s relative position within the triangular space can be
/ data. (a) Julian day 67 and (b) Julian day 93.
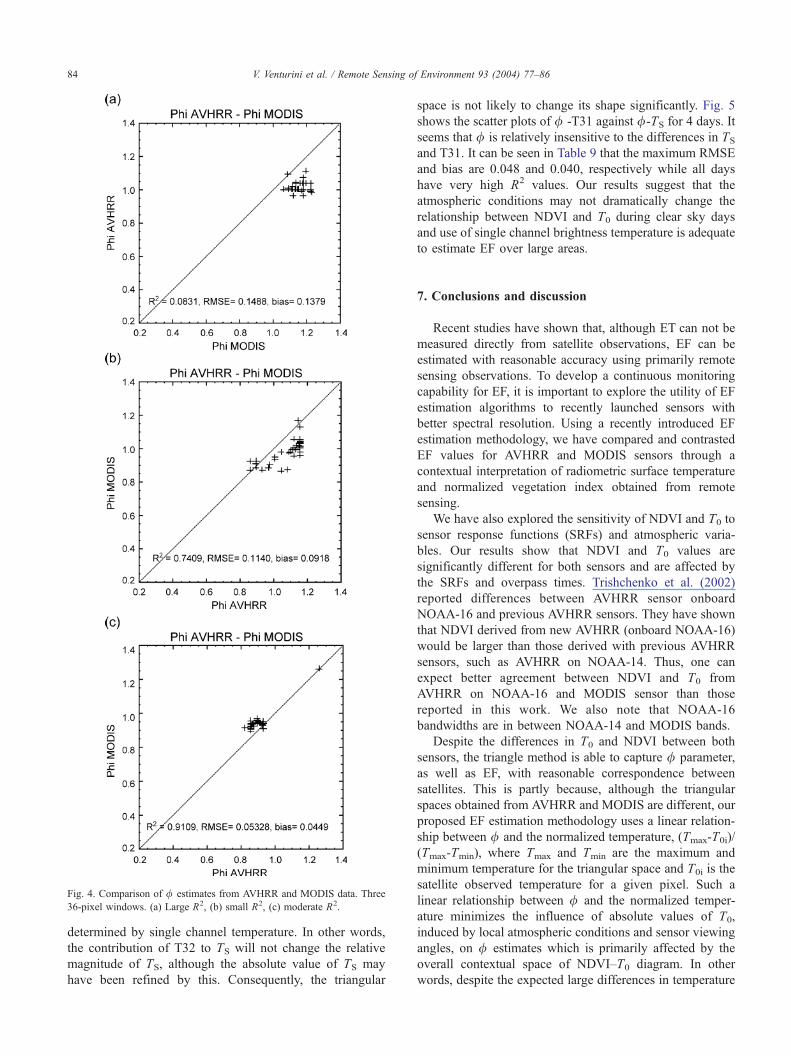
Fig. 4. Comparison of / estimates from AVHRR and MODIS data. Three
36-pixel windows. (a) Large R2, (b) small R2, (c) moderate R2.
V. Venturini et al. / Remote Sensing of Environment 93 (2004) 77–8684
determined by single channel temperature. In other words,
the contribution of T32 to TS will not change the relative
magnitude of TS, although the absolute value of TS may
have been refined by this. Consequently, the triangular
space is not likely to change its shape significantly. Fig. 5
shows the scatter plots of / -T31 against /-TS for 4 days. It
seems that / is relatively insensitive to the differences in TS
and T31. It can be seen in Table 9 that the maximum RMSE
and bias are 0.048 and 0.040, respectively while all days
have very high R2 values. Our results suggest that the
atmospheric conditions may not dramatically change the
relationship between NDVI and T0 during clear sky days
and use of single channel brightness temperature is adequate
to estimate EF over large areas.
7. Conclusions and discussion
Recent studies have shown that, although ET can not be
measured directly from satellite observations, EF can be
estimated with reasonable accuracy using primarily remote
sensing observations. To develop a continuous monitoring
capability for EF, it is important to explore the utility of EF
estimation algorithms to recently launched sensors with
better spectral resolution. Using a recently introduced EF
estimation methodology, we have compared and contrasted
EF values for AVHRR and MODIS sensors through a
contextual interpretation of radiometric surface temperature
and normalized vegetation index obtained from remote
sensing.
We have also explored the sensitivity of NDVI and T0 to
sensor response functions (SRFs) and atmospheric varia-
bles. Our results show that NDVI and T0 values are
significantly different for both sensors and are affected by
the SRFs and overpass times. Trishchenko et al. (2002)
reported differences between AVHRR sensor onboard
NOAA-16 and previous AVHRR sensors. They have shown
that NDVI derived from new AVHRR (onboard NOAA-16)
would be larger than those derived with previous AVHRR
sensors, such as AVHRR on NOAA-14. Thus, one can
expect better agreement between NDVI and T0 from
AVHRR on NOAA-16 and MODIS sensor than those
reported in this work. We also note that NOAA-16
bandwidths are in between NOAA-14 and MODIS bands.
Despite the differences in T0 and NDVI between both
sensors, the triangle method is able to capture / parameter,
as well as EF, with reasonable correspondence between
satellites. This is partly because, although the triangular
spaces obtained from AVHRR and MODIS are different, our
proposed EF estimation methodology uses a linear relation-
ship between / and the normalized temperature, (Tmax-T0i)/
(Tmax-Tmin), where Tmax and Tmin are the maximum and
minimum temperature for the triangular space and T0i is the
satellite observed temperature for a given pixel. Such a
linear relationship between / and the normalized temper-
ature minimizes the influence of absolute values of T0,
induced by local atmospheric conditions and sensor viewing
angles, on / estimates which is primarily affected by the
overall contextual space of NDVI–T0 diagram. In other
words, despite the expected large differences in temperature

Table 9
Comparison between T31 and LST—MODIS-/ from T31 and MODIS-/ from LST
T31 versus LST T31-/ versus LST-/
RMSE (K) Bias (K) R2 Max. difference (K) RMSE Bias R2 Max. difference
JD67 2.929 2.864 0.985 10.64 0.019 �0.005 0.987 0.256
JD91 3.286 3.231 0.972 6.39 0.048 0.040 0.950 0.149
JD92 3.518 3.471 0.971 6.88 0.039 0.029 0.969 0.184
JD93 3.217 3.144 0.989 8.69 0.025 0.013 0.987 0.222
V. Venturini et al. / Remote Sensing of Environment 93 (2004) 77–86 85
and NDVI between satellites, the normalization procedures
for temperature and NDVI, in conjunction with the triangle
method, are able to recover the / parameter, otherwise
knows as a moisture availability, with reasonable corre-
spondence between satellites. This is true for a wide variety
of ambient conditions evidenced by the number of case days
in this study.
One of the main criticisms of using one channel
brightness temperature approach to estimate T0, is that it
is affected by atmospheric variables and viewing angles.
Our / estimates from single channel brightness temperature
and optimal land surface temperatures suggest that, absolute
values of temperature do not dramatically change the
Fig. 5. Comparison between MODIS-/ derived from T4 and
relationship between NDVI and T0 during clear sky days.
Consequently, we argue that the use of single channel
brightness temperature appears to be adequate for the
estimation of EF in conjunction with the triangle method
evaluated in this study over large areas.
Although TS values can be derived using split-window
method, their accuracy is questionable at the daily scale. We
often see the multiday (e.g., 14-day or 16-day) composite of
TS from AVHRR or MODIS, which are not directly
applicable for the proposed method. For near real-time
applications, the split-window method (without other cor-
rections that need atmospheric parameter) is a fast way for TS
given the prescribed parameters sets in this method.
LST. For Julian days (a) 67, (b) 91, (c) 92 and (d) 93.

V. Venturini et al. / Remote Sensing of Environment 93 (2004) 77–8686
However, the uncertainties related to these parameters and
their dependencies on channel specific land surface emis-
sivity will introduce difficult issues to address—in fact,
many of these issues are not fully resolved in the research
community at this point. The TS at the daily scale involves
atmospheric and radiative transfer corrections in addition to
the split-window technique. Then, the dependencies on other
data sources could be a serious constraint to apply our
methodology in different areas (e.g., with no trained
expertise at local level in interpreting and handling these
correction procedures).
One of the limitations of such a comparison, however,
lies in the possible pixel level geolocation mismatch at the
sensor resolution scale between AVHRR and MODIS
sensors. Furthermore, year 2001 is the last year of
NOAA-14 operational observation and satellite degradation
may cause systematic biases in AVHRR derived NDVI and
T0. Nevertheless, our comparisons have shown that such
NOAA-14 data is usable in deriving / or EF with
reasonable accuracy. The limited area (e.g., SFWMD) and
clear day comparisons may not be enough to address the
capability of the / or EF estimation method evaluated in
this study for more diversified atmospheric conditions.
Further comparisons for cloudy days need to be performed
before generalized conclusions can be made. Comparison
case studies presented here, nevertheless, indicate general
applicability of the EF estimation methodology for different
sensor systems and easily available satellite data.
References
Bastiaanssen, W. G. M., Pelgrum, H., Menenti, M., & Feddes, R. A. (1996).
Estimation of surface resistance and Priestley–Taylor a-parameter at
different scales. In J. Stewart, E.T. Engman, R.A. Feddes, & Y. Kerr
(Eds.), Scaling up in hydrology using remote sensing (pp. 93–111).
New York7 Wiley.
Beven, K. J., & Fisher, J. (1996). Remote sensing and scaling in hydrology.
In J. Stewart, E.T. Engman, R.A. Feddes, & Y. Kerr (Eds.), Scaling up
in hydrology using remote sensing (pp. 93–111). New York7 Wiley.
Carlson, T. N., Gillies, R. R., & Schmugge, T. J. (1995). An interpretation
of methodologies for indirect measurement of soil water content.
Agricultural and Forest Meteorology, 77, 191–205.
Carlson, T. N., & Ripley, D. A. J. (1997). On the relationship between
fractional vegetation cover, leaf area index, and NDVI. Remote Sensing
of Environment, 62, 241–252.
Gleason, A. C. R., Prince, S. D., Goetz, S. J., & Small, J. (2002). Effects of
orbital drift on land surface temperature measured by AVHRR thermal
sensors. Remote Sensing of Environment, 79, 147–165.
Gillies, R. R., & Carlson, T. N. (1995). Thermal remote sensing of surface
soil water content with partial vegetation cover for incorporation into
climate models. Journal of Applied Meteorology, 34, 745–756.
Gillies, R. R., Carlson, T. N., Cui, J., Kustas, W. P., & Humes, K. S. (1997).
A verification of the dtriangleT method for obtaining surface soil water
content and energy fluxes from remote measurements of the Normalized
Difference Vegetation Index (NDVI) and surface radiant temperature.
International Journal of Remote Sensing, 18(15), 3145–3166.
Holwill, C. J., & Stewart, J. B. (1992). Spatial variability of evaporation
derived from aircraft and ground-based data. Journal of Geophysical
Research, 97(D17), 19061–19089.
Huete, A., Didan, K., Miura, T., Rodriguez, E. P., Gao, X., & Ferreira, L.
G. (2002). Overview of the radiometric and biophysical performance of
the MODIS vegetation indices. Remote Sensing of Environment, 83,
195–213.
Islam, S., Jiang, L., & Eltahir, E. (2002). Satellite based evapotranspiration
estimates. Final project report, South Florida Water Management
District, September 2002, p. 74.
Islam, S., Jiang, L., & Eltahir, E. (2003). Satellite based evapotranspiration
estimates. Final project report, South Florida Water Management
District, September 2003.
Jackson, R. D., Reginato, R. J., & Idso, S. B. (1977). Wheat canopy
temperature: A practical tool for evaluating water requirements. Water
Resources Research, 13, 651–656.
Jiang, L., & Islam, S. (1999). A methodology for estimation of surface
evapotranspiration over large areas using remote sensing observations.
Geophysical Research Letters, 26(17), 2773–2776.
Jiang, L., & Islam, S. (2001). Estimation of surface evaporation map over
southern Great Plains using remote sensing data. Water Resources
Research, 37(2), 329–340.
Jiang, L., Islam, S., & Carlson, T. N. (2003). Uncertainties in latent heat
flux measurement and estimation: Implications for using a simplified
approach with remote sensing data. In review at Canadian Journal of
Remote Sensing.
Justice, C. O., Townshend, J. R. G., Vermonte, E. F., Masuoka, E.,
Wolfe, R. E., Saleous, N., et al. (2002). An overview of MODIS land
data processing and product status. Remote Sensing of Environment,
83, 3–15.
Moran, M. S., Clarke, T. R., Kustas, W. P., Weltz, M., & Amer, S. A.
(1994). Evaluation of hydrologic parameters in a semiarid rangeland
using remotely sensed spectral data. Water Resources Research, 30(5),
1287–1297.
Myneni, R. B., Maggion, S., Iaquinta, J., Privette, J. L., Gobron, N., Pinty,
B., et al. (1995). Optical remote sensing of vegetation: Modeling,
caveats and algorithms. Remote Sensing of Environment, 51, 169–188.
Nishida, K., Nemani, R. R., Running, S. W., & Glassy, J. M. (2003). An
operational remote sensing algorithm of land evaporation. Journal of
Geophysical Research, 108(D9), 4270.
Norman, J. M., Anderson, M. C., Kustas, W. P., French, A. N., Mecikalski,
J., Torn, R., et al. (2003). Remote sensing of surface energy fluxes at
101-m pixel resolutions. Water Resources Research, 39(8), 1221.
Price, J. C. (1983). Estimating surface temperature from satellite thermal
infrared data—A simple formulation for the atmospheric effect. Remote
Sensing of Environment, 13, 353–361.
Price, J. C. (1990). Using spatial context in satellite data to infer regional
scale evaporanspiration. IEEE Transactions on Geoscience and Remote
Sensing, 28(5), 940–948.
Santanello Jr., J., & Friedl, M. (2003). Diurnal covariation is soil heat flux
and net radiation. Journal of Applied Meteorology, 42, 851–862.
Seguin, B., Assad, E., Fretaud, J. P., Imbernom, J. P., Kerr, Y., &
Lagouarde, J. P. (1989). Use of meteorological satellite for rainfall and
evaporation monitoring. International Journal of Remote Sensing, 10,
1001–1017.
Sobrino, J. A., Coll, C., & Caselles, V. (1991). Atmospheric correction for
land surface temperature using NOAA-11 AVHRR channels 4 and 5.
Remote Sensing of Environment, 38, 19–34.
Trishchenko, A., Cihlar, J., & Li, Z. (2002). Effects of spectral function on
surface reflectance and NDVI measured with moderate resolution
satellite sensors. Remote Sensing of Environment, 81, 1–18.
Verstraete, M. M., & Pinty, B. (1996). Designing optimal indexes for
remote sensing applications. IEEE Transactions on Geoscience and
Remote Sensing, 34(5), 1254–1264.
Wan, Z., & Dozier, J. (1996). A generalized split-window algorithm for
retrieving land-surface temperature from space. IEEE Transactions on
Geoscience and Remote Sensing, 43(4), 892–905.
Wan, Z., & Li, Z. (1997). A physics-based algorithm for retrieving land
surface emissivity and temperature from EOS/MODIS data. IEEE
Transactions on Geoscience and Remote Sensing, 35(4), 980–996.
Copyright © 2022 FDOKUMEN