Off-line signature recognition using morphological pixel variance analysis
CARATTERIZZAZIONE DI UN RIVELATORE MONOLITICO A PIXEL REALIZZATO CON TECNOLOGIA SOI
121
UNIVERSITÀ DEGLI STUDI DI UDINE _______________________________________________ Facoltà di Ingegneria Corso di Laurea Specialistica in Ingegneria Elettronica Dipartimento di Fisica Tesi di Laurea CARATTERIZZAZIONE DI UN RIVELATORE MONOLITICO A PIXEL REALIZZATO CON TECNOLOGIA SOI Relatore Prof. Luca Selmi Laureando Giulio Lovat Correlatore Prof. Francesca Soramel _______________________________________________ Anno Accademico 2008/09
Transcript of CARATTERIZZAZIONE DI UN RIVELATORE MONOLITICO A PIXEL REALIZZATO CON TECNOLOGIA SOI

UNIVERSITÀ DEGLI STUDI DI UDINE
_______________________________________________
Facoltà di Ingegneria
Corso di Laurea Specialistica in Ingegneria Elettronica
Dipartimento di Fisica
Tesi di Laurea
CARATTERIZZAZIONE DI UN RIVELATORE
MONOLITICO A PIXEL REALIZZATO CON
TECNOLOGIA SOI
Relatore
Prof. Luca Selmi
Laureando
Giulio Lovat
Correlatore
Prof. Francesca Soramel
_______________________________________________
Anno Accademico 2008/09


Sommario
Lo scopo di questo lavoro è di studiare e caratterizzare un nuovo tipo di rivelatore
monolitico costruito con tecnologia SOI (SOI Imager).
Nei capitoli 1 e 2 verranno descritti i rivelatori utilizzati nel progetto ALICE (LHC -
CERN) realizzati con pixel ibridi. Ne verrà discusso il funzionamento evidenziando
pregi e carenze.
Nel capitolo 3 si introdurranno i rivelatori monolitici; in particolare verrà spiegato il
funzionamento dei rivelatori CCD e CMOS per poi passare ai rivelatori SOI.
Nel capitolo 4 verranno mostrati i risultati che sono stati ottenuti con i primi due
rivelatori prodotti con tecnologia SOI che hanno portato alla progettazione del
rivelatore SOI Imager che è l’oggetto di questa tesi.
Nel capitolo 5 si spiegherà il funzionamento del chip SOI Imager insieme con
l’elettronica necessaria al suo funzionamento e con la strumentazione utilizzata
durante tutte le misure.
Infine nel capitolo 6 saranno illustrate tutte le misure fatte e verranno discussi i
risultati ottenuti.
Saranno evidenziati i pregi e i difetti di questo dispositivo basato su una tecnologia
nuova che presenta ancora dei problemi di gioventù ma che offre un margine di
miglioramento delle prestazioni molto ampio.


Indice
1 Capitolo 1 – Esperimento ALICE ........................................................................ 7
1.1 Introduzione ................................................................................................... 7
1.2 Inner Tracking System (ITS) ......................................................................... 9
1.3 SPD .............................................................................................................. 11
2 Capitolo 2 – Hybrid Pixel .................................................................................. 15
2.1 Sensore ........................................................................................................ 15
2.2 Elettronica di readout .................................................................................. 22
2.3 Pro e contro.................................................................................................. 24
3 Capitolo 3 – SOI Pixel Detector......................................................................... 25
3.1 Introduzione al progetto CROMOPIX ........................................................ 25
3.2 Descrizione generale ................................................................................... 26
3.3 Obiettivi del progetto ................................................................................... 27
3.4 Campi di utilizzo di questo tipo di tecnologia ............................................. 29
3.5 Tecnologia allo stato solido ......................................................................... 30
3.5.1 Sensore CCD ........................................................................................ 30
3.5.2 Sensore CMOS ..................................................................................... 30
3.6 Sensore SOI ................................................................................................. 35
4 Capitolo 4 – Evoluzione tecnologia dell’SOI Pixel Detector ............................ 39
4.1 LDRD SOI 1 ................................................................................................ 39
4.2 LDRD SOI 2 ................................................................................................ 48
4.3 Conclusioni .................................................................................................. 49
5 Capitolo 5 – SOI Imager .................................................................................... 51
5.1 Pixel Pinout ................................................................................................. 52
5.2 Pixel Layout................................................................................................. 54
5.3 Mezzanine board ......................................................................................... 56
5.4 DAQ ............................................................................................................ 57
5.5 Uso del DAQ ............................................................................................... 63
6 Capitolo 6 – Misure di caratterizzazione del chip .............................................. 69
6.1 Misura C-V// I-V ......................................................................................... 70
6.2 Misure di Noise ........................................................................................... 73
6.3 Misure di calibrazione ................................................................................. 78
6.4 Misure di Back-gate .................................................................................... 90
6.4.1 Anelli di guardia: funzionamento......................................................... 90
6.4.2 P+ Array ............................................................................................... 92
6.4.3 P+ I/O ................................................................................................... 93
6.4.4 P+ Outer ............................................................................................... 96
6.4.5 Conclusione .......................................................................................... 98
6.5 Misure di raccolta carica ............................................................................ 100
6.5.1 Clustering ........................................................................................... 100
6.5.2 Raccolta della carica da parte dell’anello di guardia .......................... 106
6.5.3 Scansione con il laser ......................................................................... 107
6.6 Calcolo efficienza ...................................................................................... 110
7 Conclusioni ....................................................................................................... 115
8 Appendici ......................................................................................................... 117
9 Bibliografia ....................................................................................................... 119

7
1 Capitolo 1
Esperimento ALICE
1.1 Introduzione
ALICE (A Large Ion Collider Experiment) è un rivelatore di tipo general-
purpose per gli ioni pesanti. Si trova presso il presso il Large Hadron Collider (LHC)
del CERN di Ginevra.
ALICE è stato progettato per studiare lo stato della materia negli istanti
immediatamente successivi al Big Bang. In questo stato, caratterizzato da alta densità
di energia e alta temperatura, la materia è costituita da un plasma di quark e gluoni
(quark gluon plasma (QGP)).
Lo studio sarà effettuato facendo collidere a velocità relativistiche due fasci di ioni di
PB di modo da ottenere alte temperature e alte densità di materia e di energia.
Il programma inoltre include collisioni con ioni più leggeri e con energie più basse,
in modo da variare la densità di energia e il volume di interazione necessari per le
collisioni protoni-nuclei.
Il rivelatore ALICE è stato costruito con la collaborazione di oltre 1000 fisici
ed ingegneri da 102 istituti di 30 diversi paesi. Le sue dimensioni sono di 16x26 m
con un peso totale di circa 10000 t.
ALICE è formato da una parte centrale a forma di barile la quale serve a misurare
adroni, elettroni e fotoni seguita da uno spettrometro per muoni, l'insieme di tutti i
rivelatori formanti ALICE è poi racchiuso in un magnete solenoidale necessario ad
allungare, curvandole, le traiettorie delle particelle di modo che riescano ad interagire
nei vari rivelatori e possano essere identificate.
Partendo dall’interno il barile contiene l’Inner Tracking System (ITS), costituito da
sei piani di Silicon Pixel (SPD), Drift (SDD), e Strip (SSD) detector, un cilindrico
Time-Projection Chamber (TPC), tre array per l’identificazione delle particelle del
tipo Time-of-Flight (TOF), un Ring Imaging Cherenkov (HMPID), un Transition
Radiation (TRD) detector e due calorimetri elettromagnetici (PHOS e EMCal).
Essendo l’unico esperimento dedicato agli ioni pesanti di LHC, ALICE è un
detector di tipo general purpose con un range di eventi osservabili molto grande che
erano precedentemente coperti da diverse macchine (AGS, SPS, RHIC) con
esperimenti più specifici.
La scelta ed il progetto del suo sistema di rivelamento è stato dettato da requisiti
fisici così come dalle condizioni che ci si aspetta nelle collisioni nucleo-nucleo a
LHC.
La restrizione progettuale maggiore è stata l’elevata molteplicità di particelle
prodotte nelle collisioni tra gli ioni pesanti.
L'elevata molteplicità richiede che la parte più interna di ALICE, cioè l'ITS ed in
particolare l'SPD, sia in grado di distinguere le particelle prodotte, questo implica
una elevata risoluzione spaziale ottenibile con rivelatori di vertice ad alta granularità. [1]

Capitolo 1 – Esperimento Alice
8
Figura 1.1: Alice layout

1.2 Inner Tracking System (ITS)
9
1.2 Inner Tracking System (ITS)
I principali compiti dell’Inner Tracking System (ITS) sono di localizzare il
vertice primario di produzione delle particelle con una risoluzione minore di 100 µm,
di ricostruire il vertice secondario dal decadimento degli iperoni e dei mesoni D e B,
di tracciare ed identificare le particelle con un momento minore di 100 MeV/c, di
migliorare il momento e la risoluzione angolare delle particelle ricostruite dal TPC e
di ricostruire le tracce delle particelle che hanno attraversato la regione morta di
quest’ultimo.
L’ITS contribuisce praticamente a tutti gli obiettivi di ALICE; è il suo cuore
principale.
Circonda la beam pipe al quale fornisce anche supporto meccanico in modo che non
vi sia nessun tipo di movimento durante le operazioni.
La beam pipe è un cilindro di berillio spesso 800 µm e con un diametro esterno di
59.6 mm coassiale con i vari strati dell’ITS stesso. Come si può vedere in Figura 1.2
l’ITS è formato da sei strati cilindrici di detector al silicio, posti ad una distanza
radiale compresa tra 4 e 43 cm.
Il numero, posizione e segmentazione degli strati è stato ottimizzato per un’efficiente
ricerca delle tracce delle particelle e per un’alta risoluzione del vertice. In particolare,
il raggio esterno è determinato dalla necessità di accoppiare le tracce rilevate
dall’ITS con quelle rilevate dal TPC. Il raggio interno invece è il minimo permesso
dal raggio del beam pipe (3 cm).
I detector e l’elettronica di front-end sono montati su strutture in fibra di carbonio. Le
dimensioni e la tecnologia usata per queste strutture varia da strato a strato.
Figura 1.2: L’Inner Tracking System
A causa dell’alta densità di particelle che ci si aspetta in ALICE (circa 50 particelle per cm
2) e al fine di ottenere la desiderata risoluzione per i primi due strati più interni
si sono scelti i Silicon Pixel Detector (SPD) mentre per i due strati centrali si è deciso
di usare i Silicon Drift Detector (SDD).
Capitolo 1 – Esperimento Alice
10
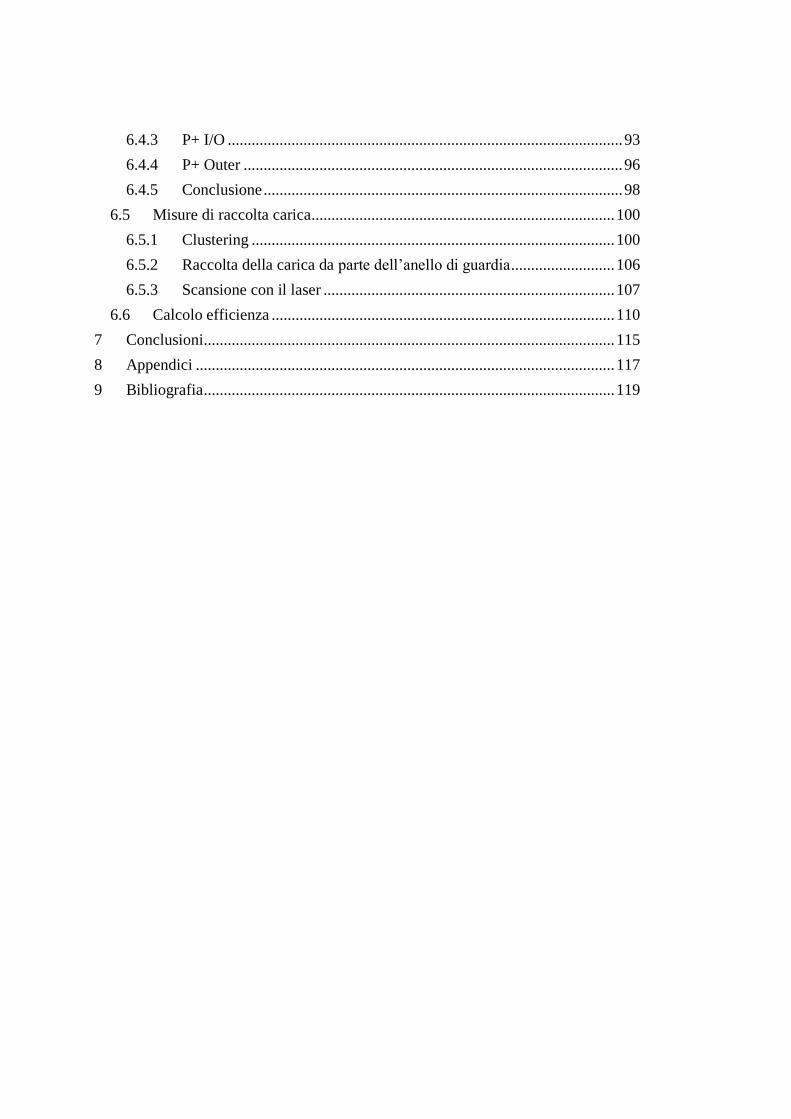
Per quanto riguarda i due strati più esterni dove ci si aspetta di avere una densità di
particelle minore circa di una per cm2 si è usato Silicon Strip Detector (SSD).
Nella Tabella 1.1 è possibile vedere le caratteristiche principali dei detector nei sei
strati.
Tabella 1.1: Dimensione dei detector dell’ITS (area attiva)
Per l’ITS la total dose prevista per tutta la durata degli esperimenti varia da qualche
krad per le parti esterne dell’ITS a circa 250 krad per le parti più interne.
Sebbene questi livelli non siano molto alti confrontati con quelli per esempio che si
hanno in ATLAS e CMS, tutti i componenti usati nell’ITS sono stati testati per
funzionare a livelli di total dose che eccedono in modo significativo le dosi che ci si
aspetta di avere.
1.3 SPD
11
1.3 SPD
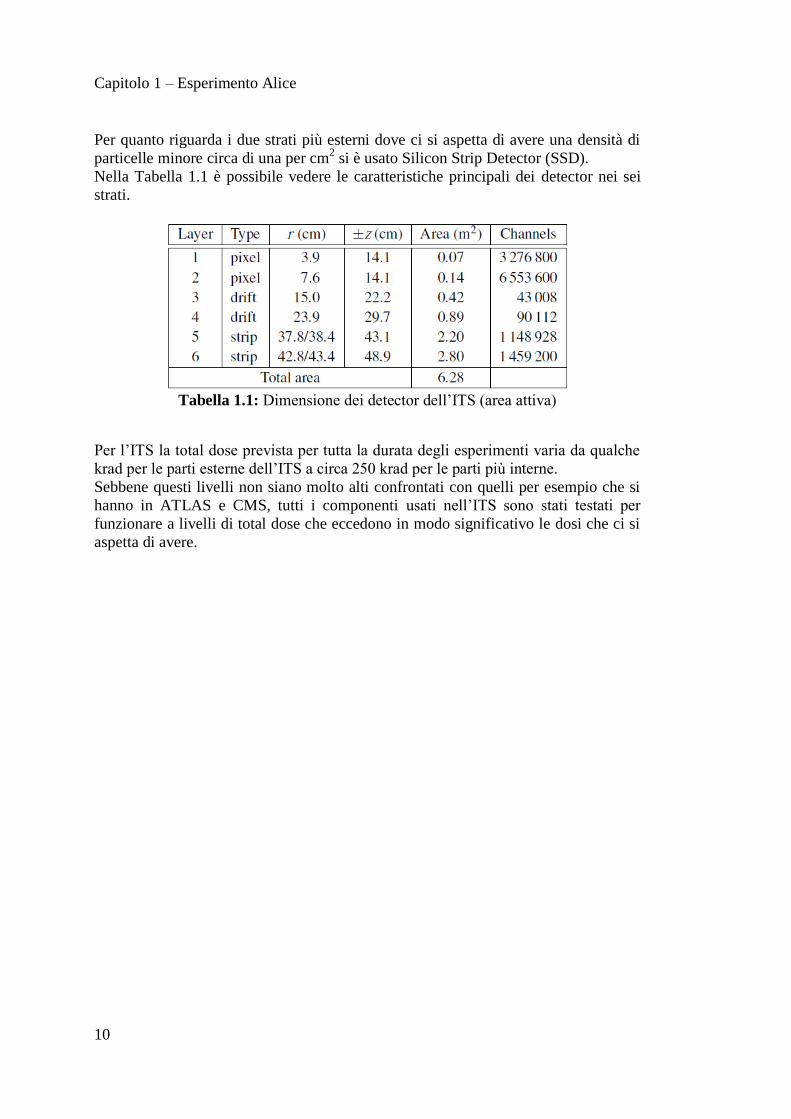
Il rivelatore SPD è il rivelatore più interno di ALICE. E’ costruito su dieci
supporti in fibra di carbonio (CFSS – Carbon Fiber Support System) disposti con
simmetria cilindrica attorno alla linea del fascio di particelle ad alta energia. Ogni
CFSS supporta 6 rilevatori, chiamati stave, i quali a loro volta sono formati da due
mezzi stave, o meglio halfstave.
Su ogni CFSS, due stave si trovano sullo strato
interno e quattro su quello esterno. Infatti il
rivelatore intero ha uno strato interno, composto
da 20 stave, posto ad una distanza radiale dalla
linea del fascio pari a 39 mm, ed uno strato
esterno, contenente 40 stave, posto ad una
distanza radiale di 76 mm. La lunghezza coperta
dal rivelatore lungo la direzione del fascio è
circa di 286 mm.
L’half-stave è l’entità elementare funzionale
dell’SPD, e nell’intero rivelatore ce ne sono120.
Nella figura 1.4 si riporta un disegno in sezione
del rivelatore SPD dove si può vedere come
sono disposti gli stave nella maniera descritta
sopra. La disposizione sui due piani è stata fatta in modo da ottimizzare l’angolo
solido di copertura η del rivelatore.
Figura 1.4: Sezione del rivelatore SPD. Si possono notare i dieci supporti in fibra di
carbonio contenenti 6 stave ciascuno.
Figura 1.3: Il rilevatore SPD
dell’ITS.

Capitolo 1 – Esperimento Alice
12
Ciascun stave è composto da due half-stave di 143 mm di lunghezza, ciascuno
formato da due ladder e da un chip pilota. Un ladder è un pezzo di silicio diviso in
cinque unità con 32x256 celle, di dimensione 50x425 μm ciascuna. Ogni cella
costituisce un pixel, cioè un unità elementare di rilevazione, ed è una giunzione pn.
Su ognuna delle cinque unità del ladder è applicato un chip di lettura tramite una
tecnica chiamata bump bonding. Essa collega ogni pixel del sensore ad ogni pixel del
chip. Un sensore di questo tipo prende il nome di Hybrid-Pixel. Il chip pilota (MCM
– Multi Chip Module), situato all’estremità dell’half-stave, garantisce
l’accoppiamento elettronico tra il rivelatore ed il sistema di acquisizione dei dati.
I ladder sono costituiti da più strati di materiali differenti. Partendo dal basso si ha:
Grease termico per l’accoppiamento termico tra il ladder e il CFSS
il grounding foil, fatto di kapton e alluminio su due strati. Ha la funzione di
isolare elettricamente il rivelatore dal supporto in fibra di carbonio. Ha uno
spessore di 75 μm, 25 di alluminio e 50 di kapton;
i cinque chip di lettura, fatti di silicio, dello spessore di 150 μm e dimensioni 15.59x13.6 mm;
il bump bonding, che come già detto realizza il collegamento dei pixel dei chip con quelli del sensore;
il sensore, di silicio, spesso 200 μm con un area sensibile di 12.8x69.9 mm
contenente 8192 pixel;
il bus per il trasporto dei dati e delle tensioni necessarie al funzionamento del rivelatore. E’ formato da strati alternati di colla, kapton ed alluminio con uno
spessore totale di 280 μm.
Figura 1.5: Sezione trasversale di un ladder: sono rappresentati tutti i materiali che
compongono il ladder, oltre al CFSS e al tubo di raffreddamento.

1.3 SPD
13
Figura 1.6: Sezione longitudinale del ladder con la parte terminale dell’half-stave
Come si può facilmente osservare anche dalle figure le dimensioni di questa struttura
sono tutto tranne che trascurabili. La parte che influisce maggiormente nello spessore
è rappresentata dal detector e dal chip di readout che formano il pixel di ALICE.
Di seguito sarà analizzato questo componente presente in ALICE e si cercherà di
trovare una valida alternativa che possa ridurre le dimensioni dell’SPD.

Capitolo 1 – Esperimento Alice
14

15
2 Capitolo 2
Hybrid Pixel
I pixel sono costituiti da un diodo di raccolta polarizzato inversamente
collegato ad un’elettronica di readout mediante tecnologia bump bonding.
Questa tecnologia permette di sviluppare in modo separato elettronica e sensore che
vengono progettati in modo individuale e poi collegati tra di loro.
La struttura del singolo pixel è ben descritta in Figura 2.1
Figura 2.1: Sezione di un pixel ibrido
Si vede che la struttura è divisa in due parti principali:
Sensore
Elettronica di readout
2.1 Sensore
La parte di sensore altro non è che una regione p-n formata come dice il nome stesso da un semiconduttore di tipo p messo a contatto con un semiconduttore di tipo
n.
In una giunzione di tipo p-n, le lacune tendono a diffondere dalla zona p alla zona n
(viceversa per gli elettroni): in prossimità della giunzione si forma una regione
svuotata dai portatori in cui vi è un campo elettrico non nullo (dovuto agli atomi
droganti ionizzati non compensati) che tende ad opporsi al moto di diffusione dei
portatori. All’equilibrio termodinamico le correnti di diffusione e di drift per le
lacune e gli elettroni sono uguali ed opposte in ogni punto della giunzione e la
corrente totale è nulla.
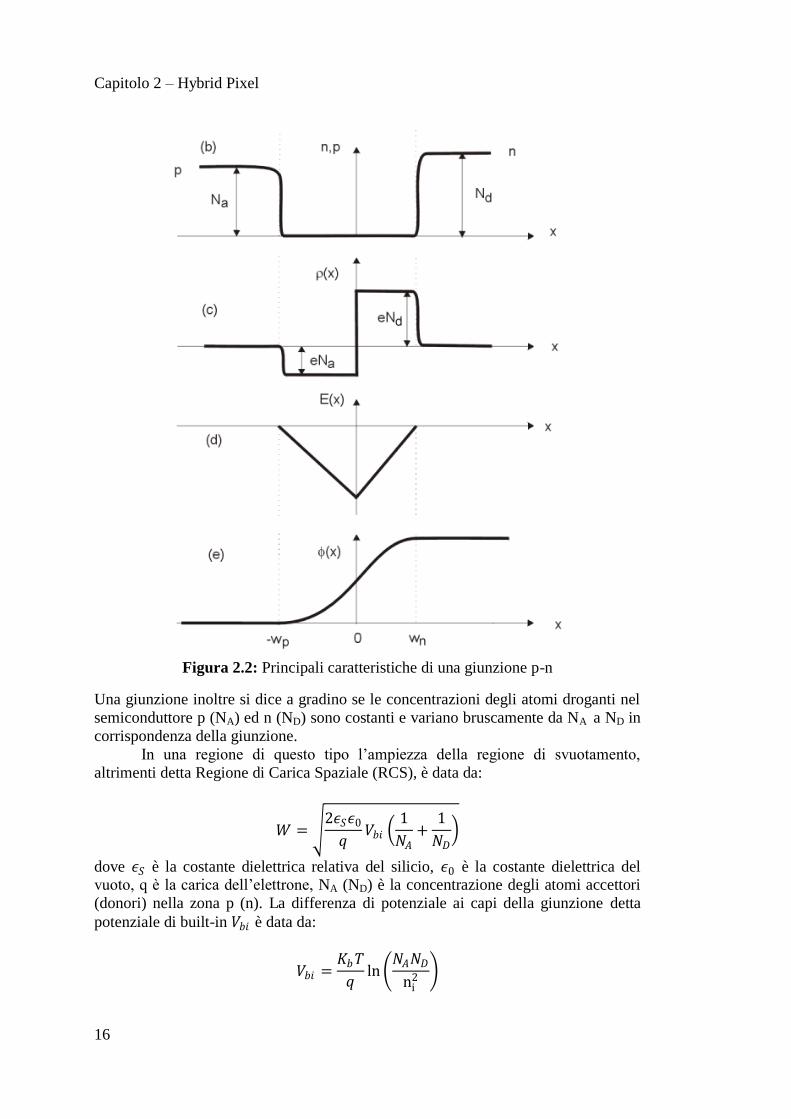
In Figura 2.2 sono riportate le principali caratteristiche di una giunzione p-n non
polarizzata a gradino in termini di densità dei portatori, densità di carica spaziale,
campo elettrico e potenziale elettrico. [2]
Capitolo 2 – Hybrid Pixel
16
Figura 2.2: Principali caratteristiche di una giunzione p-n
Una giunzione inoltre si dice a gradino se le concentrazioni degli atomi droganti nel
semiconduttore p (NA) ed n (ND) sono costanti e variano bruscamente da NA a ND in
corrispondenza della giunzione.
In una regione di questo tipo l’ampiezza della regione di svuotamento,
altrimenti detta Regione di Carica Spaziale (RCS), è data da:
𝑊 = 2𝜖𝑆𝜖0
𝑞𝑉𝑏𝑖
1
𝑁𝐴+
1
𝑁𝐷
dove 𝜖𝑆 è la costante dielettrica relativa del silicio, 𝜖0 è la costante dielettrica del vuoto, q è la carica dell’elettrone, NA (ND) è la concentrazione degli atomi accettori
(donori) nella zona p (n). La differenza di potenziale ai capi della giunzione detta
potenziale di built-in 𝑉𝑏𝑖 è data da:
𝑉𝑏𝑖 =𝐾𝑏𝑇
𝑞ln
𝑁𝐴𝑁𝐷
ni2

2.1 Sensore
17
dove 𝐾𝑏 è la costante di Boltzmann, T è la temperatura in gradi Kelvin.
L’ampiezza della regione di svuotamento di una giunzione polarizzata inversamente
con una tensione V, che per convenzione assumiamo positiva, è:
𝑊 = 2𝜖𝑆𝜖0
𝑞 𝑉𝑏𝑖 + 𝑉
1
𝑁𝐴+
1
𝑁𝐷
Poiché 𝑉𝑏𝑖 è dell’ordine del volt, nel caso della polarizzazione inversa con 𝑉𝑏𝑖 ≪ 𝑉 e
per una giunzione fortemente asimmetrica con 𝑁𝐴 ≫ 𝑁𝐷 , si ricava:
𝑊 ≅ 2𝜖𝑆𝜖0
𝑞
𝑉
𝑁𝐷 (2.1)
L’estensione della zona di svuotamento nella regione p e nella regione n (xp e xn
rispettivamente), sono legate alle concentrazioni dei droganti dalla condizione di
neutralità elettrica complessiva RCS:
𝑥𝑝𝑁𝐴 = 𝑥𝑛𝑁𝐷
Generalmente in una giunzione p+-n la concentrazione del drogante accettore è alcuni
ordini di grandezza maggiore rispetto alla concentrazione del drogante del substrato
n e quindi lo svuotamento della giunzione avviene essenzialmente nel substrato.
Viene detta tensione di svuotamento di un diodo (Vd) la tensione di
polarizzazione inversa che rende massima l’ampiezza della regione di svuotamento.
Per un rivelatore a giunzione p+-n, Vd può essere ricavata dall’espressione 2.1 se è
nota la concentrazione 𝑁𝐷 del drogante del substrato:
𝑉𝑑 =𝑞𝑁𝐷
2𝜖𝑆𝜖0𝑑2 (2.2)
Ove d è lo spessore del substrato.
Un metodo per determinare 𝑉𝑑 è considerare l’andamento della capacità della regione
di svuotamento al variare della tensione di polarizzazione. La carica per unità di area
nella regione di svuotamento nella zona p o n del semiconduttore è rispettivamente:
𝑄𝑝 = −𝑞𝑁𝐴𝑊 𝑄𝑛 = 𝑞𝑁𝐷𝑊 (2.3)
Nella condizione di piccoli segnali AC sovrapposti alla tensione DC di
polarizzazione, la giunzione mostra un comportamento capacitivo che può essere
calcolato dall’equazione 2.3. Nel caso di una giunzione p+-n tenendo conto anche
dell’equazione 2.1 si ricava che la capacità verso il substrato è:
𝐶 = −𝑑𝑄𝑝
𝑑𝑉=
𝑑𝑄𝑛
𝑑𝑉=
𝜖𝑆𝜖0
𝑊𝐴 =
𝜖𝑆𝜖0𝑞𝑁𝐷
2𝑉𝐴

Capitolo 2 – Hybrid Pixel
18
Ove A è l’area della superficie del diodo. All’aumentare della tensione di
polarizzazione inversa l’ampiezza della regione di svuotamento aumenta, mentre il
valore della capacità diminuisce fino a quando il diodo non è completamento
svuotato. In tale condizione V=Vd e la capacità raggiunge il suo valore minimo
C=Cmin che viene detto capacità di svuotamento.
La misura della capacità per piccoli segnali al variare della tensione di polarizzazione
viene espressa come: 1
𝐶2=
2
𝑞𝜖𝑆𝜖0𝑁𝐷
1
𝐴2𝑉
Dalla pendenza di tale curva nella regione lineare, è possibile determinare ND e
quindi la tensione di svuotamento dalla formula 2.2.
Osserviamo che la tensione di polarizzazione inversa applicata non può crescere in
definitivamente. Quando infatti V=VBR, ove VBR è la tensione di break down,
appaiono i fenomeni di rottura della giunzione a causa di portatori per effetto valanga
o tunneling.
In una giunzione p-n la corrente di polarizzazione inversa, detta anche
corrente di leakage, ha tra contributi: la corrente di drift nella RCS delle lacune
(elettroni) dalla regione n alla regione p (dalla regione p alla regione n) I1, la corrente
di generazione dei portatori nella regione di svuotamento I2, la corrente di
generazione dei portatori della regione superficiale I3.
Il primo è esprimibile dalla caratteristica ideale del diodo come:
𝐼1 = 𝐼0 𝑒−
𝑞𝑉𝐾𝑏𝑇 − 1
La corrente di saturazione inversa I0 è data da:
𝐼0 = 𝐴𝑞 𝑛𝑖
2
𝑁𝐷 𝐷𝑝
𝜏𝑝+
𝑛𝑖2
𝑁𝐴 𝐷𝑛
𝜏𝑛
Ove 𝐷𝑛 e 𝜏𝑛 (𝐷𝑝 𝑒 𝜏𝑝) sono rispettivamente la costante di diffusione e il tempo di
vita medio degli elettroni (lacune) nelle regioni quasi neutre. Per tensioni V superiori
a 3KbT/q (che a 27°C vale 0.08V) il termine esponenziale è trascurabile rispetto
all’unità e I1=-I0. Nel caso di una giunzione p+-n la corrente di drift delle lacune nella
RCS domina rispetto al contributo degli elettroni, per cui:
𝐼0 = 𝐴𝑞𝑛𝑖
2
𝑁𝐷
𝐷𝑝
𝜏𝑝
Per determinare il secondo contributo introduciamo brevemente la teoria di
Schockley-Hall-Read (SHR). Nella teoria SHR della generazione e ricombinazione
dei portatori dovuta ai livelli interbanda il tasso di generazione (se U<0) o
ricombinazione (se U>0) per un centro t avente energia Et e concentrazione Nt è:

2.1 Sensore
19
𝑈 =𝑣𝑡𝜎𝑛𝜎𝑝𝑁𝑡 𝑝𝑛 − 𝑛𝑖
2
𝜎𝑝 𝑝 + 𝑛𝑖𝑒𝐸𝑖−𝐸𝑡𝐾𝑏𝑇 + 𝜎𝑛 𝑛 + 𝑛𝑖𝑒
𝐸𝑖−𝐸𝑡𝐾𝑏𝑇
Ove 𝑣𝑡 = 3𝐾𝑏𝑇/2𝑚 è la velocità termica dei portatori, e 𝜎𝑛 e 𝜎𝑝 sono
rispettivamente la sezione d’urto di cattura degli elettroni e delle lacune. Se la
sezione di cattura per gli elettroni e le lacune è la stessa 𝜎𝑛 = 𝜎𝑝 = 𝜎0, e
considerando che nella regione di svuotamento 𝑝, 𝑛 ≪ 𝑛𝑖 , ricaviamo che il tasso di generazione dei portatori è:
𝐺 = −𝑈 =𝑣𝑡𝜎0𝑁𝑡𝑛𝑖
2𝑐𝑜𝑠 𝐸𝑖 − 𝐸𝑡
𝐾𝑏𝑇
=𝑛𝑖
𝜏𝑔 (2.4)
Il tempo medio di generazione 𝜏𝑔 è dato da:
𝜏𝑔 =2𝑐𝑜𝑠
𝐸𝑖 − 𝐸𝑡
𝐾𝑏𝑇
𝑣𝑡𝜎0𝑁𝑡
Il tasso di generazione è massimo per i centri interbanda che hanno energia vicino al
livello di Fermi intrinseco Ei, cioè prossima al centro della banda proibita.
La corrente di generazione dei portatori nella regione di svuotamento è:
𝐼2 = 𝑞𝐴 |𝑈|𝑑𝑥𝑥𝑛
−𝑥𝑝
Ove 𝑥𝑝 e 𝑥𝑛 sono gli estremi della regione di svuotamento.
Tenendo conto dell’espressione 2.4 è possibile ricavare:
𝐼2 = 𝑞𝐴𝑛𝑖
2
𝜏𝑔𝑊
Ove W è l’ampiezza della regione di svuotamento.
Di conseguenza la dipendenza dalla tensione di polarizzazione inversa della corrente
di generazione dei portatori nella regione di svuotamento, per una giunzione p+-n,
tenendo conto dell’espressione 2.1 se 𝑉𝑏𝑖 ≪ 𝑉, diventa:
𝐼2 = 𝑞𝐴𝑛𝑖
2
𝜏𝑔
2𝑞𝜖𝑆𝜖0𝑞
𝑁𝐷𝑉 (2.5)
Nel caso in cui si faccia riferimento ai centri di generazione superficiale
l’espressione 2.4 è ancora valida se al posto di 𝑁𝑡 consideriamo la densità di centri
superficiali per unità di area 𝑁𝑠𝑡 . Allora il tasso di generazione ha le dimensioni di
1/ 𝑐𝑚2 ∙ 𝑠 e si definisce la velocità di generazione superficiale:
Capitolo 2 – Hybrid Pixel
20
𝑆 = 2𝑐𝑜𝑠
𝐸𝑖 − 𝐸𝑡
𝐾𝑏𝑇
𝑣𝑡𝜎0𝑁𝑡
La corrente dovuta ai centri di generazione superficiale è pertanto:
𝐼3 = 𝑞𝐴𝑆𝑛𝑖
Generalmente nei particolari diodi al silicio usati come rivelatori di particelle il
contributo predominante alla corrente di leakage è quello dovuto alla generazione dei
portatori nella regione di svuotamento, quindi 𝐼𝑡𝑜𝑡 ≅ 𝐼2 ∝ 𝑉.
Un rivelatore di particelle a semiconduttore nella sua forma più semplice è
essenzialmente una giunzione p+-n polarizzata inversamente. Il lato del rivelatore
dalla parte della regione p+ viene detto lato giunzione, mentre il lato dalla parte della
regione n viene detto lato ohmico o di back side. Sul lato giunzione la regione p+ è
circondata da uno strato di ossido di passivazione. Il lato ohmico del rivelatore viene
drogato con alte dosi di atomi donori e ricoperto con uno strato di alluminio.
Quando una particella attraversa il semiconduttore l’energia persa nei
processi di ionizzazione porta alla creazione di coppie elettrone-lacuna: nel silicio
l’energia media per creare a temperatura ambiente una coppia elettrone-lacuna è 3.6
eV, cioè circa 3 volte l’intervallo di energia della banda proibita.
In un rivelatore polarizzato inversamente le lacune e gli elettroni si muovono verso
gli elettrodi opposti con una velocità di drift che dipende dal campo elettrico:
𝑣𝑒 , = 𝜇𝑒 ,𝐸 , ove 𝜇𝑒 , sono le mobilità di elettroni e lacune. Inoltre i portatori sono
soggetti ad un fenomeno di diffusione spaziale e di ricombinazione che è tanto
maggiore quanto maggiore è il tempo che gli elettroni e le lacune impiegano per
raggiungere gli elettrodi.
Se i tempi di vita media dei portatori 𝜏𝑝 , 𝜏𝑛 sono maggiori dei tempi impiegati per
raggiungere gli elettrodi 𝑡𝑝 , 𝑡𝑛 , la carica integrata dal segnale di corrente raccolto è
proporzionale alla perdita di energia della particella dovuta ai processi di
ionizzazione.
I tempi di vita media dei portatori dipendono dalla tecnologia usata per la
fabbricazione del rivelatore: valori di 1-3 ms sono tipici di buoni rivelatori a
temperatura ambiente.
La geometria della nuvola di carica è di tipo sferico e il diametro è approssimabile
con la seguente relazione:
𝑅𝑒 = 0.0171𝑇1.75 (2.6)
Ove 𝑅𝑒 è espresso in µm e T è l’energia dell’elettrone espressa in keV. Nella zona svuotata è presente un forte campo elettrico che fa muovere gli elettroni e
le lacune verso gli elettrodi di raccolta con una velocità che può essere approssimata
da:
𝑣𝑑𝑟𝑖𝑓𝑡 =𝑑𝑧
𝑑𝑡=
𝜇𝑞𝑁𝐴
𝜖 𝑑𝑓 − 𝑧

2.1 Sensore
21
Dove 𝑑𝑓 è lo spessore dello strato svuotato e z è la distanza alla quale si genera la
carica. Rispetto alla formula 𝑣𝑒 , = 𝜇𝑒 ,𝐸 con questa si riesce a calcolare la velocità
di drift in funzione nella profondità z.
L’equazione può essere integrata per ottenere il tempo t necessario agli elettroni per
raggiungere lo strato sepolto:
𝑡 =𝜖
𝜇𝑞𝑁𝐴ln
𝑑𝑓
𝑑𝑓 − 𝑧 (2.7)
Durante questo tempo la nube di elettroni si espande radialmente per diffusione.
Assumendo che i tempi di vita siano maggiori del tempo di drift possiamo calcolare
il diametro di questa nuvola di elettroni che vale:
𝑐𝑓 = 8𝐷𝜖
𝜇𝑞𝑁𝐴
𝑑𝑓
𝑑𝑓 − 𝑧
12
(2.8)
Ove D è il coefficiente di diffusione ed è legato alla mobilità dalla relazione di
Einstein 𝐷 = 𝐾𝑏𝑇𝜇/𝑞.
Supponendo un coefficiente di diffusione costante e pari a 35 cm2·s
-1, µ=1500cm
2·V
-
1·s
-1 e Na=10
13cm
-3 si ottiene un valore per la zona svuotata di 30 µm e un diametro
𝑐𝑓 di circa 9 µm.[3]
In un dispositivo illuminato da sopra la diffusione di carica è meno pronunciata di
quanto si ottiene illuminando il dispositivo da sotto. Questo perché la probabilità di
generare coppie elettrone lacuna dipende dalla profondità.
Con il termine lunghezza di attenuazione o lunghezza di assorbimento λ in un
materiale si intende la probabilità che un flusso di particelle uguali venga ridotto di
un fattore 1
𝑒 per assorbimento.
Matematicamente, la probabilità di trovare una particella alla profondità x in un
materiale è calcolata mediante la legge di Beer-Lambert:
𝑃 𝑥 = 𝑒−𝑥𝜆 (2.9)
Dove λ generalmente dipende dal materiale.
Di conseguenza illuminando il dispositivo da sotto si ha una generazione più bassa e
la nuvola impiega più tempo per essere raccolta diventando così più grande.

Capitolo 2 – Hybrid Pixel
22
2.2 Elettronica di readout
In questo tipo di rivelatori il valore della capacità associata al diodo è grande
(nell’ordine dei pF) e il rapporto segnale rumore è decisamente piccolo (circa 20).
E’ quindi necessario realizzare un circuito che amplifichi la carica contenuta nel
condensatore.
Figura 2.3: Elettronica di readout per un pixel ibrido
La catena elettronica di misura è riportata nella Figura 2.3. QS·i(t) rappresenta il
generatore di corrente che descrive il comportamento del rivelatore al Silicio in
seguito al passaggio della particella ionizzante. Il segnale i(t) è pensato normalizzato
ad area unitaria; esso ha usualmente un’estensione temporale fino ad alcuni ns, in
pratica il tempo che le cariche “liberate” impiegano a raggiungere gli elettrodi; nel
seguito assumeremo i(t) = δ(t), ovvero un segnale di durata nulla. Il rivelatore, dal
punto di vista circuitale, in quanto costituito da un diodo contropolarizzato si
rappresenta assai fedelmente con una capacità CD (che ammonta a circa 100 pF per
ogni cm2 di superficie e per 100 μm di spessore di svuotamento). RB (10 MΩ o più) è
la resistenza in serie al generatore di tensione HV che assicura la
contropolarizzazione del rivelatore.
La resistenza RB deve essere inserita non fosse altro perchè, se HV fosse collegato
direttamente al rivelatore, tutta la corrente QS·i(t) verrebbe assorbita dal generatore
ideale di tensione HV (un cortocircuito per il segnale). CA (dell’ordine di 0.1 μF) è
una capacità che serve a disaccoppiare la tensione ai capi del rivelatore dalla massa
virtuale dell’operazionale. Il valore di CA è talmente superiore a CD che il suo effetto
sul segnale può essere ignorato. CP (< 10 pF, tipicamente) rappresenta la capacità
“parassita” all’ingresso del circuito operazionale, dovuta ai collegamenti e allo stadio
di ingresso. Il blocco PA è il cosiddetto preamplificatore (di carica): esso ha il
compito di fornire in uscita una tensione VOPA (“V output pre-amplifier”)
proporzionale all’integrale di QS·i(t), ovvero QS.
Risolvendo le equazioni associate al circuito si ottiene:

2.2 Elettronica di readout
23
𝑉𝑂𝑃𝐴 = −𝑄
𝐶𝑓𝑒−
𝑡𝜏
Dove 𝜏 = 𝑅𝑓𝐶𝑓
Cf (1÷2 pF) è la capacità in relazione all’operazionale che funge quindi da integratore
di Miller. Spesso la capacità Cf si richiude (come nel tratteggio) a monte di CA, così
da rendere l’effetto di CA sul segnale ancor meno importante.
Rf (tipicamente > 100 MΩ) ha la funzione principale di correggere la risposta ideale
di un integratore “matematico” e permette di scaricare dinamicamente l’uscita
dell’operazionale senza che si debba ricorrere a circuiti dedicati per la scarica del
condensatore Cf dopo ogni integrazione.
Si assuma di fornire in ingresso al preamplificatore un segnale del tipo (tipico di un
rivelatore):
Figura 2.4: Segnale in ingresso al preamplificatore
L’uscita del preamplificatore sarà la seguente:
Figura 2.5: Segnali in uscita dal preamplificatore
La salita dell’uscita del preamplificatore di carica corrisponde alla durata
dell’impulso in corrente posto in ingresso.
Il tempo di salita corrisponde al tempo in cui il dispositivo integra il segnale in
corrente.
La parte destra dell’immagine evidenzia il lento decadimento dell’uscita causato
dalla resistenza Rf.
Lo shaper o formatore, che riceve ai terminali di ingresso l’uscita del PA, ha la
funzione, di amplificare e filtrare in frequenza il segnale, preservando l’informazione
della carica raccolta QS e ottimizzando il rapporto segnale/rumore.

Capitolo 2 – Hybrid Pixel
24
2.3 Pro e contro
I pixel di tipo ibrido offrono i seguenti vantaggi:
Possibilità di progettazione e realizzazione di sensore ed elettronica di readout in maniera separata ed indipendente.
Ogni pixel è contattato singolarmente mediante bump bonding.
Hanno però anche degli svantaggi che ne limitano l’uso:
La risoluzione è limitata a circa 50um dalla dimensione minima dei bump.
La velocità e il guadagno sono limitati dalla capacità che ha un valore elevato.
A causa del bump bonding si ottiene un rivelatore parecchio spesso.
Rivelatore e chip di readout devono essere collegati mediante bump bonding.
Questo non è un passaggio costruttivo semplice in quanto necessita di un preciso allineamento delle due superfici e una successiva saldatura.
Questi svantaggi hanno fatto si che si stiano cercando delle soluzioni per ottenere dei
rivelatori monolitici.
Un rivelatore monolitico permette di integrare diodo di raccolta ed elettronica di
readout nella stessa struttura monolitica di silicio che verrà opportunamente
progettata in modo da “ospitare” diversi tipe di struttura.
Attualmente i sensori monolitici più diffusi sono quelli basati su tecnologia bulk
CMOS che possono sostituire i pixel ibridi seppur con dei limiti. Con questo lavoro
si vuole presentare un nuovo tipo di rivelatore basato su tecnologia SOI: l’SOI Pixel
Detector.

25
3 Capitolo 3
SOI Pixel Detector
La tecnologia Silicon on Insulator (SOI) permette di fabbricare circuiti
CMOS su un sottile strato di silicio elettronicamente isolato dal resto del wafer.
L’isolamento dell’elettronica dal detector offre chiari vantaggi per il progetto e la
realizzazione di sensori a pixel monolitici per le rivelazione di particelle che sono
confrontabili con i pixel MAPS (Monolithic Active Pixel Sensor), realizzati con
processo CMOS standard.
Innanzitutto possono essere realizzati sia transistor di tipo nMOS che di tipo pMOS,
senza disturbare la raccolta della carica, inoltre il detector può essere polarizzato
migliorando l’efficienza di raccolta della carica stessa.
3.1 Introduzione al progetto CROMOPIX
Ci si propone di realizzare un dispositivo monolitico allo stato solido per
imaging innovativo caratterizzato da una risposta spettrale molto ampia (dal visibile
fino alla regione dei raggi X) e dalla possibilità intrinseca di separare i colori senza
l’uso di filtri.
Gli attuali sensori per imaging realizzati con tecnologie allo stato solido di tipo
commerciale mostrano una buona risposta allo spettro visibile e nel vicino IR ma
sono privi di sensibilità nella regione degli UV e dei raggi X. Inoltre se è necessario
effettuare una discriminazione delle lunghezze d’onda o imaging a colori bisogna
aggiungere un filtro esterno al sistema.
Usando una speciale versione del processo SOI e combinandolo con un trattamento
al plasma per la superficie (δ-doping), è possibile realizzare un sensore per imaging
di tipo monolitico capace di rivelare la radiazione senza perdita di efficienza dagli IR
(decine di eV) fino ai raggi X (keV).
Il processo SOI permette la crescita del circuito elettronico sopra uno strato di Ossido
di Silicio, che isola l’elettronica dal substrato.
Essendo questa elettronica isolata, è possibile svuotare il substrato applicandogli un
campo elettrico, e raccogliere così la carica generata dai fotoni che interagiscono in
profondità dentro al dispositivo.
Essendo la profondità di penetrazione di un fotone nel silicio fortemente dipendente
dalla sua lunghezza d’onda, la variazione della regione svuotata permette di
selezionare la risposta spettrale del dispositivo.
Uno svuotamento di 100 µm assicura una buona sensibilità ai fotoni con energia di
alcuni keV, mentre per fotoni di 4 – 10 eV (vicino agli UV), dove il silicio è al più
insensibile alla luce e i fotoni penetrano il rivelatore solo per alcuni micron.
Il processo δ-doping assicura che la piccola carica rilasciata non venga intrappolata
dai difetti superficiali del materiale rendendola così misurabile.

Capitolo 3 – SOI Pixel Detector
26
3.2 Descrizione generale
Scopo della ricerca è lo sviluppo di un rivelatore a pixel di tipo SOI
caratterizzato da un’alta granularità, alta velocità, ampiezza spettrale estesa e con la
possibilità di discriminare le diverse lunghezze d’onda.
Il progetto intende combinare le ben note tecnologie commerciali per la
fabbricazione di circuiti integrati con alcune soluzioni all’avanguardia sviluppate
dalla comunità R&D riguardanti la tecnologia dei rivelatori.
L’obiettivo è quello di consegnare un rivelatore capace di fare imaging; compito
attualmente riservato ai sensori ibridi ma in questo caso con un dispositivo più
compatto, facile da produrre e molto più economico.
L’uso di un processo di fabbricazione standard e la mancanza di qualsiasi altro tipo
di operazione post fabbricazione implica che tale dispositivo possa essere anche
usato in quegli esperimenti dove si ha un’ampia area di misura, come in alcune parti
dei detector per la fisica delle alte energie o per imaging di tipo scientifico.
L’innovativa capacità di discriminare le lunghezze d’onda trova applicazione in tutte
quelle misure dove il dato chiave è rappresentato da informazioni real time
riguardanti l’energia della radiazione, come nell’identificazione tra diverse proteine
nella sequenza del DNA o per imaging di molecole.
Un’ulteriore possibilità è quella di usare questa feature per avere immagini a colori
senza l’uso di filtri riducendo così i costi dovuti a questi componenti che non
sarebbero più necessari.

3.3 Obiettivi del progetto
27
3.3 Obiettivi del progetto
Il punto di partenza per l’implementazione di questo nuovo tipo di dispositivo
è la tecnologia CMOS. In dettaglio vogliamo realizzare un dispositivo avete
l’elettronica di lettura sopra al pixel come i dispositivi CMOS ma con un
caratteristiche di raccolta della carica molto simili ai pixel ibridi.
La parte innovativa di questo progetto è l’uso di una variante della tecnologia
CMOS, il processo SOI combinato con un substrato molto resistivo e un innovativo
processo di δ-doping al plasma.
Combinando insieme queste 3 tecnologie nello stesso dispositivo è possibile superare
molti problemi della tecnologia CMOS senza rinunciare ai suoi punti di forza.
L’intero progetto è basato su tecnologie già testate alcune delle quali sono
attualmente usate per usi commerciali.
Gli obiettivi finali di questo rivelatore sono fondamentalmente 3:
1. Alta efficienza nello spettro dei raggi X
2. Capacità di lavorare anche nello spettro degli UV
3. Capacità di discriminare i colori
A questi 3 obiettivi corrispondono altrettanti problemi da risolvere:
1. Se vogliamo rilevare fotoni con energia pari a quella dei raggi X, che hanno
una lunga lunghezza di assorbimento nel silicio, dobbiamo progettare un
dispositivo completamente svuotato; un dispositivo nel quale la zona di
raccolta può essere estesa a tutto il suo volume. Questo permette di
raccogliere carica generata dal passaggio di radiazione attraverso tutto lo
spessore del substrato e non solo nella regione epitassiale.
Inoltre questo permette di usare il rivelatore anche dalla parte opposta
dell’elettronica di lettura risolvendo il problema dovuto alle metallizzazioni
del pixel che bloccano i fotoni. Si parla in questo caso di back-illumination.
Per implementare questa soluzione, che non può essere fatta con una
tecnologia CMOS standard, si userà il processo tecnologico già citato CMOS
SOI della giapponese OKI. In questo processo uno strato di 200 nm di SiO2
separa il silicio contenente l’elettronica di lettura dal substrato di silicio ad
alta resistenza che funziona da rivelatore. Questo può essere completamente
svuotato con tensioni di bias contenute (minori di 100V).
2. Il secondo problema è la bassa penetrazione dei raggi UV nel silicio. A
queste lunghezze d’onda (3 eV – 25 eV corrispondenti a 400 nm – 50 nm)
molta della carica si genera nei primi 10 nm di silicio dove si trovano molti
difetti generati dal processo di assottigliamento del chip. Questi difetti
funzionano da trappole per le cariche generate che vengono così perse. Per
rimediare a questo problema si può applicare un processo di δ-doping
(proprietà del Jet Propulsion Laboratory – NASA) che consiste in un dopaggio al plasma dei primi 2-3 strati atomici. Questo drogaggio controllato
permetti di rimuovere i difetti presenti in questi strati poco profondi
prevenendo la ricombinazione della carica vicino alla superficie.
In questo modo il dispositivo risulta sensibile anche allo spettro UV, spettro
tipicamente non rilevabile dagli attuali sensori al silicio.

Capitolo 3 – SOI Pixel Detector
28
3. Infine, per avere un’immagine a colori, o per poter discriminare diverse
lunghezze d’onda invece di usare filtri esterni è sufficiente variare lo spessore
della regione svuotata nel substrato. Essendo la lunghezza di penetrazione dei
fotoni dipendente dalla loro energia assottigliando la regione svuotata si
riesce ad ottenere un effetto uguale a quello di un filtro.
Con 3 diverse acquisizioni per esempio sarà possibile distinguere i 3 diversi
colori di un segnale luminoso rimuovendo così i filtri esterni guadagnando in
efficienza, semplicità e risoluzione del sistema complessivo.
Basandoci sulle attuali conoscenza della tecnologia CMOS SOI dovrebbe essere
possibile progettare un rivelatore con una risoluzione di 1024x1024 pixel con una
dimensione del pixel stesso compresa tra i 5 e i 20 µm e con una velocità di lettura di
centinaia di frames al secondo.
La selezione della lunghezza d’onda di interesse avverrà variando la profondità della
regione svuotata tramite la tensione di bias.

3.4 Campi di utilizzo di questa tecnologia
29
3.4 Campi di utilizzo di questo tipo di tecnologia
Sensibilità ai raggi X
Un detector sensibile ai raggi X può trovare applicazione in molti campi dalla
microscopia a raggi X all’astronomia.
La microscopia a raggi X è usata in molte applicazioni in campi scientifici come la
biologia e la medicina così come la scienza dei materiali. Un esempio: in scienza dei
materiali viene usata questa tecnica per effettuare una mappatura chimica dei
polimeri. In astronomia invece i raggi X sono emessi dai corpi celesti ma sono anche
filtrati dall’atmosfera. Per questo motivo tutti gli attuali telescopi che sfruttano
questo principio per lo studio degli astri si trovano al di fuori dell’atmosfera terrestre
e sono basati su pixel di tipo CCD con tutti i problemi che ne conseguono: difficoltà
nel pattern di pilotaggio, consumo di potenza e impossibilità di elaborare il segnale
on-chip.
Il detector SOI che si vuole sviluppare può essere una buona alternativa in questo
campo essendo uno dei suoi punti di progetto l’avere un’ottima sensibilità in questo
spettro di lunghezze d’onda.
Sensibilità agli UV
I raggi UV vengono attualmente utilizzati in applicazioni industriali come
modello di ispezione usando quelli che vengono definiti Reflected-UV. Questo
processo inizia con l’illuminazione di una superficie con luce ultravioletta. Questa
viene riflessa o diffusa ed è poi letta da una fotocamera sensibile agli UV. La luce
ultravioletta tende ad essere fortemente assorbita da molti materiali, rendendo
possibile visualizzare la topologia della superficie di un oggetto.
In questo modo è possibile trovare difetti anche molto piccoli su diversi tipi di
superficie. Attualmente sono utilizzati detector CCD con tutti i limiti che ne
conseguono.
Capacità di discriminare i colori
Per quanto riguarda la discriminazione dei colori c’è il vantaggio di poter
ottenere immagini a colori potendo scegliere se lavorare in modalità monocromatica
massimizzando la sensibilità oppure se lavorare in modalità a colori; il tutto con lo
stesso dispositivo.
Tuttavia c’è anche uno svantaggio dato dalla velocità di acquisizione dell’immagine
in quanto per un’immagine a colori sono richieste 3 esposizioni. Se la velocità di
acquisizione è il punto fondamentale di un eventuale progetto questo dispositivo
potrebbe non essere il più adatto.

Capitolo 3 – SOI Pixel Detector
30
3.5 Tecnologia allo stato solido
Di seguito vengono analizzate quelle che sono le due principali tecnologie di
pixel per imaging: CCD e CMOS. Entrambi i tipi di rivelatori convertono la luce in
una carica elettrica che dopo elaborano in segnali elettrici.
3.5.1 Sensore CCD
In un sensore CCD la carica di ogni pixel è trasferita attraverso un numero
molto limitato di nodi di uscita (spesso solo uno) per essere poi convertita in una
tensione, bufferizzata e inviata fuori dal chip come segnale analogico. Tutti i pixel
sono usati per catturare la luce e l’uniformità dell’uscita è molto alta. I sensori CCD
raccolgono e immagazzinano la carica attraverso una serie di potenziali definiti da
una matrice di elettrodi fissati sopra al dispositivo. Ad ogni acquisizione, effettuando
uno shift nelle tensioni degli elettrodi, le cariche vengono mosse verso la periferia
del chip dove sono bufferizzati ed amplificati in modo da avere un segnale analogico
in uscita proporzionale alla carica immagazzinata nel pixel. Tuttavia nei CCD non vi
è la possibilità di integrare l’elettronica direttamente sopra il pixel e quindi questo
tipo di dispositivo non è utile per il presente progetto.
3.5.2 Sensore CMOS
In un sensore CMOS, ogni pixel ha il suo convertitore carica-tensione e il
sensore spesso include amplificatori, correttori del rumore e altri circuiti.
Con ogni pixel che effettua la conversione l’uniformità è di solito bassa e l’area del
pixel di solito non è completamente sensibile alla luce, ma l’intero chip può essere
progettato per richiedere minor elettronica al di fuori di esso. Ogni pixel può così
elaborare singolarmente il suo segnale.
Un moderno imager CMOS è fondamentalmente costituito da una matrice di celle di
pixel ognuna della quali comprende una fotorivelatore, di solito un diodo polarizzato,
e un’elettronica di base di readout che nella sua forma più semplice consiste in 3
transistor: uno per l’amplificazione, uno per la selezione della cella e uno per il reset
(configurazione 3T APS).

3.5 Tecnologia allo stato solido
31
Figura 3.1: Sezione e schema di una tipica cella 3T in tecnologia CMOS
Nello stesso die in periferia sono inclusi i decoder e i multiplexer necessari ad
accedere ai segnali memorizzati in ogni pixel indirizzando una alla volta le singole
celle insieme ai circuiti analogici usati per amplificare e bufferizzare i segnali
ricevuti dai singoli pixel.
Ci focalizzeremo sul funzionamento dei detector CMOS in quanto permettono di
includere il condizionamento del segnale all’interno del pixel stesso il che conferisce a questo tipo di rivelatore un’ampia flessibilità in molte applicazioni.
Lo scopo fondamentale di un rivelatore è quello di generare una carica proporzionale
alla energia della radiazione che lo attraversa.
Tutti i moderni dispositivi per imaging CMOS sono costituiti da silicio e i
componenti elettronici sono creati attraverso la definizione di aree con drogaggi
differenti. Questo significa che il materiale con il quale la radiazione interagirà sarà
fondamentalmente silicio. L’effetto dominante nella generazione della carica è
l’effetto fotoelettrico. L’energia necessaria a liberare un elettrone generando così una
coppia elettrone lacuna è di 3.6eV. Quando la coppia è stata generata vi è un tempo
massimo per raccogliere la carica prima che si ricombini.
In un dispositivo CMOS standard la carica generata da radiazione incidente è
raccolta per diffusione nella regione epitassiale che è spessa alcuni micron ed è a
bassa resistività. La carica si sposta così nella regione svuotata della giunzione p-n
per venire poi letta come una tensione quando il transistor che seleziona il pixel
viene attivato. Il transistor di reset ripristina la carica originale nella giunzione
cortocircuitando il diodo all’alimentazione. Ad ogni ciclo di lettura il segnale
immagazzinato è spostato attraverso il transistor di selezione all’amplificatore
analogico situato nella periferia e viene poi inviato fuori dal chip. Dopo la lettura
della cella il transistor di reset la riporta al suo stato iniziale e può così iniziare un
altro periodo di integrazione.
La dimensione della capacità associata al diodo e quella degli altri componenti
collegati al nodo di uscita del diodo compongono quella che viene chiamata “well
capacity” che corrisponde alla massima quantità di carica che può essere
immagazzinata e determina il guadagno di conversione carica – tensione in base alla
relazione fondamentale:

Capitolo 3 – SOI Pixel Detector
32
𝑉 =𝑄
𝐶
Va notato che nel rivelatore CMOS, oltre al rumore introdotto dal complicato percorso dal pixel alla periferia, il maggior rumore si ha durante l’operazione di
reset. Da qui l’esistenza di soluzioni più avanzate che usano 4 o 5 transistor in modo
da realizzare un miglior controllo del rumore associato all’operazione di reset e
ottenere una migliore uniformità della risposta del pixel.
Essendo la carica raccolta per diffusione nella regione svuotata, la sua quantità è
limitata dal tempo di vita dei portatori prima che si ricombinino (circa 10 µs) e dal
loro tempo di cammino libero medio (circa 10 µs). Per una MIP (Minimum Ionising
Particle) questo si traduce in una carica accumulata di 1400 e-.
Una delle limitazioni degli attuali imager CMOS è il compromesso tra
elettronica integrata nel pixel (numero di transistor) e il fattore di forma. Per fare in
modo che questo parametro sia il più vicino possibile all’unità di fatto non ci
dovrebbe essere nessun’altra area all’interno del pixel dopata come il diodo di
raccolta altrimenti la carica si dividerebbe tra il diodo e le altre giunzioni ad esso
simili perdendola.
Questa condizione effettivamente riduce il fattore di forma di un valore pari al
rapporto tra l’area del diodo e quella del resto dell’elettronica. Per ovviare a ciò una
soluzione molto comune è quella di usare solo transistor complementari al diodo. In
questo modo il fattore di forma diventa indipendente dalla dimensione del diodo che
a questo punto viene progettata per soddisfare altri requisiti come guadagno e forma
del segnale.
Il problema di questa soluzione è che si può usare un solo tipo di transistor rendendo
in effetti difficile integrare all’interno del pixel circuiti più complessi del semplice
circuito di lettura del segnale.
Il meccanismo di raccolta fin qui esposto implica che la regione utilizzabile per
generare segnale utile sia limitata ad uno spessore di alcuni micron imponendo così
un taglio allo spettro di risposta del dispositivo.
Si vuole cercare di espandere lo spettro utile anche all’UV con lunghezze
d’onda di alcune decine di nanometri.
Figura 3.2: Lunghezza di assorbimento dei fotoni nel silicio

3.5 Tecnologia allo stato solido
33
Il rilevamento di queste lunghezze d’onda richiede un approccio molto specializzato.
Bisogna illuminare da dietro il CMOS altrimenti le metallizzazioni e lo strato di
elettronica superiore andrebbero a schermare gli UV. Per raccogliere la carica
ricevuta dal retro del dispositivo il substrato deve essere completamente svuotato;
condizione questa che si accoppia molto bene con la necessità di massimizzare la
sensibilità ai raggi X.
La soluzione più comune per costruire un’immagine a colori è di mettere
sopra al detector un CFA (Colour Filter Array), spesso basato su uno schema RGB
Bayer che copre tutta la matrice di pixel.
Ogni pixel diventa così sensibile ad un solo colore. Il limite di questo metodo è che il
filtro limita di fatto l’efficienza assorbendo larga parte della radiazione incidente.
D’altro canto l’informazione relativa al colore può essere ricostruita mediante
algoritmi interpolativi di facile implementazione.
Figura 3.3: Pattern di Bayer a 3 colori
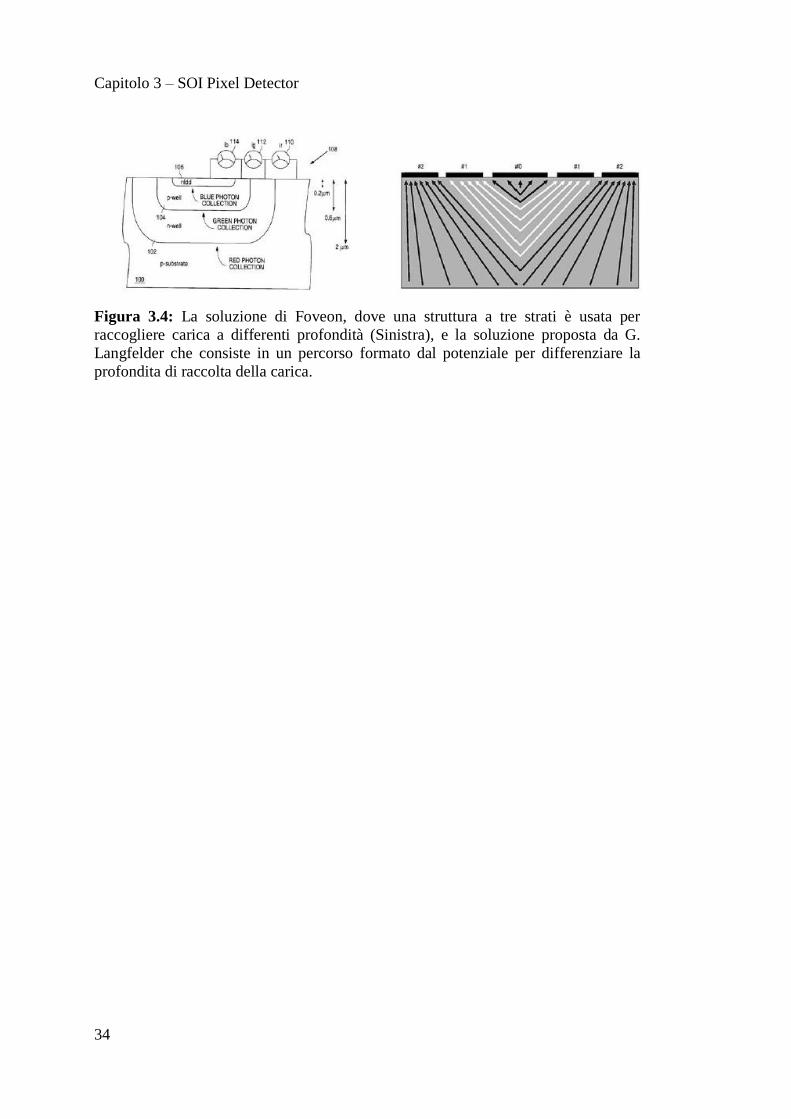
Un altro approccio meno comune è basato sulla diversa lunghezza di penetrazione
della luce nel silicio come è già stato discusso in precedenza. Una soluzione
introdotta da Foveon è di impilare in modo verticale differenti giunzioni a differenti
profondità.
Questo metodo nel quale ogni pixel del sensore è sensibile al colore non ha problemi
dovuti ad un’errata interpolazione dei colori e non soffre della perdita di potenza
dovuta ai filtri. D’altro canto non può essere implementato con una normale
tecnologia standard CMOS in quanto le profondità delle giunzioni sono dipendenti
dalla tecnologia e non possono essere scelte in fase di progettazione.
Sfruttando lo stesso principio, un’insolita soluzione è quella di creare tre differenti
“percorsi di raccolta”, uno per ogni colore primario posizionando in modo molto
accurato degli elettrodi a potenziali diversi nella superficie del pixel. Questo
approccio può essere realizzato con una tecnologia CMOS standard con il risultato
però di ottenere una cella “affollata” dove non è possibile integrare nessun altro tipo
di elettronica di lettura.
Capitolo 3 – SOI Pixel Detector
34
Figura 3.4: La soluzione di Foveon, dove una struttura a tre strati è usata per
raccogliere carica a differenti profondità (Sinistra), e la soluzione proposta da G.
Langfelder che consiste in un percorso formato dal potenziale per differenziare la
profondita di raccolta della carica.
3.6 Sensore SOI
35
3.6 Sensore SOI
In base a quanto esposto finora si ritiene possibile realizzare un rivelatore
monolitico capace di rivelare radiazioni fino al range dei raggi X con la possibilità di
distinguere le radiazioni UV. Come conseguenza sarà possibile selezionare
dinamicamente la lunghezza d’onda di taglio rendendo possibile un rendering delle
immagini a colori senza l’uso di filtri.
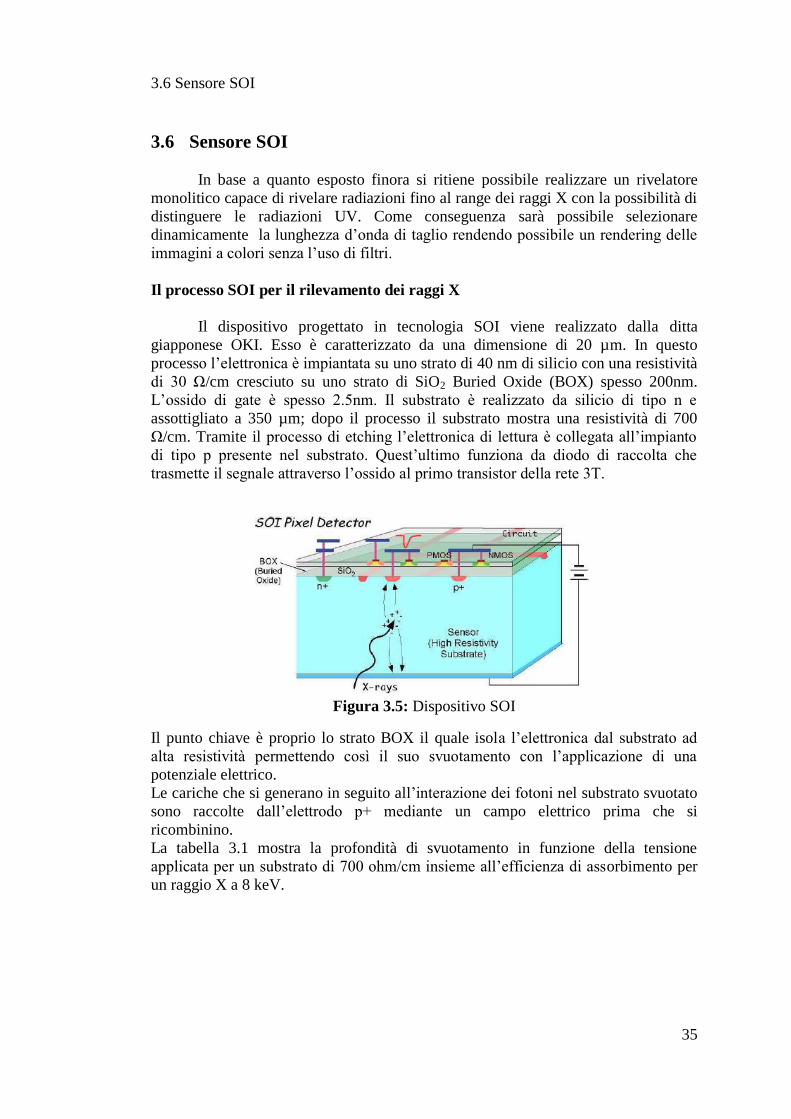
Il processo SOI per il rilevamento dei raggi X
Il dispositivo progettato in tecnologia SOI viene realizzato dalla ditta
giapponese OKI. Esso è caratterizzato da una dimensione di 20 µm. In questo
processo l’elettronica è impiantata su uno strato di 40 nm di silicio con una resistività
di 30 Ω/cm cresciuto su uno strato di SiO2 Buried Oxide (BOX) spesso 200nm.
L’ossido di gate è spesso 2.5nm. Il substrato è realizzato da silicio di tipo n e
assottigliato a 350 µm; dopo il processo il substrato mostra una resistività di 700
Ω/cm. Tramite il processo di etching l’elettronica di lettura è collegata all’impianto
di tipo p presente nel substrato. Quest’ultimo funziona da diodo di raccolta che
trasmette il segnale attraverso l’ossido al primo transistor della rete 3T.
Figura 3.5: Dispositivo SOI
Il punto chiave è proprio lo strato BOX il quale isola l’elettronica dal substrato ad
alta resistività permettendo così il suo svuotamento con l’applicazione di una
potenziale elettrico.
Le cariche che si generano in seguito all’interazione dei fotoni nel substrato svuotato
sono raccolte dall’elettrodo p+ mediante un campo elettrico prima che si
ricombinino.
La tabella 3.1 mostra la profondità di svuotamento in funzione della tensione
applicata per un substrato di 700 ohm/cm insieme all’efficienza di assorbimento per
un raggio X a 8 keV.

Capitolo 3 – SOI Pixel Detector
36
Tabella 3.1: Spessore dello svuotamento in funzione della tensione di polarizzazione
Confrontando questa tabella con la lunghezza di assorbimento del silicio di figura 3.2
si vede molto chiaramente che con un dispositivo di questi tipo sarà possibile rilevare
con alta efficienza fotoni fino al keV e, con performance minori, radiazioni fino a 10
keV.
Un altro vantaggio dato dall’approccio monolitico è la compattezza costruttiva che
impedisce la formazione di capacità parassite dovute al bondaggio di sensori esterni,
oltre ad un’alta velocità e ad un basso consumo di potenza.
UV detection
Se l’incremento della zona svuotata incrementa in modo drastico l’efficienza
di raccolta nella regione dei raggi X non risolve però il problema della bassa
penetrazione delle radiazioni UV.
Per risolvere quest’ultimo è obbligatorio lavorare con un dispositivo completamente
svuotato: estendendo la regione svuotata fino alla fine del substrato diventa possibile
raccogliere la carica superficiale generata dalla luce UV. In questo caso per lavorare
con potenziali ragionevoli il substrato deve essere assottigliato in base alla massima
tensione di bias sopportabile e in base all’efficienza di raccolta che si vuole ottenere
con i raggi X.
Sono state fatte diverse simulazioni con i rivelatori assottigliati e i risultati mostrano
come questi rilevatori assottigliati ad alcune decine di µm non cambino il loro
comportamento.
Un dispositivo assottigliato a 100um può essere completamente svuotato con una
tensione di 120 V. Assumendo che questo sia possibile il dispositivo deve essere
sensibile agli UV dal backside. Il meccanismo di grinding o quello di chemical
etching usati per assottigliare il detector danneggiano i primi strati atomici creando
degli stati trappola che non permettono alla carica di essere raccolta riducendo
l’efficienza del dispositivo.
Per risolvere questo problema si usa una tecnica sviluppata dalla NASA e chiamata
δ-doping che consiste in un processo di impiantazione al plasma.

3.6 Sensore SOI
37
Figura 3.6: Efficienza per un Silicio non dopato e per uno δ-dopato
Questo processo è di tipo MBE (Molecular Beam Epitaxy) nel quale uno strato fino e
molto dopato è depositato sotto al substrato di silicio del dispositivo. Lo strato
risultante è confinato a uno del diversi strati monocristallini del silicio contenente
circa 2x1014
atomi dopanti per cm3.
La Figura 3.6 evidenzia come un rivestimento di tipo Anti Reflective sia capace di
migliorare l’efficienza in una data banda. Si osserva anche che questa banda è molto
stretta e quindi l’applicazione di questo rivestimento dipende molto dall’applicazione
finale e comunque non va ad influenzare il normale funzionamento del detector nelle
altre bande.
Color imaging
Oltre a rendere possibile un’ampia banda di funzionamento, questo detector
permette di variare in modo dinamico la risposta alle varie lunghezze d’onda. La
variazione del potenziale di polarizzazione e di conseguenza della zona svuotata
permette di effettuare un taglio nelle lunghezze d’onda: verrà raccolta solo la carica
di quella radiazione che riesce a raggiungere la zona svuotata attraverso la parte non
svuotata del substrato.
Questo permette di ottenere un filtraggio dei colori senza l’uso di un filtro esterno a
differenza di quanto succede negli attuali dispositivi commerciali di tipo CCD o
CMOS.
Noto il fatto che il la lunghezza di assorbimento del fotone nel silicio è massima
nella regione visibile (Figura 3.7) è possibile separare la componente rossa, verde e
blu dell’immagine variando la tensione di svuotamento.

Capitolo 3 – SOI Pixel Detector
38
Figura 3.7: Lunghezza di assorbimento per i 3 colori base nel Silicio
La lunghezza di assorbimento per i fotoni dei colori rosso, verde e blu sono
rispettivamente nell’ordine dei 8.5, 3 e 1 µm. Questo significa che muovendo la
regione svuotata dal retro del dispositivo di circa 3um è possibile eliminare il 75%
della componente blu dello spettro; un ulteriore movimento di 10 µm lascia solo il
25% della componente verde e meno del 10% di quella blu. In questo scenario un
rivelatore con una regione svuotata di 30-35 µm può essere sufficiente a rivelare
l’intero spettro visibile.
Figura 3.8: Imaging a colori mediante 3 esposizioni

39
4 Capitolo 4
Evoluzione tecnologica dell’SOI Pixel Detector
Il primo SOI detector è stato realizzato dallo IET in Polonia usando una
vecchia tecnologia a 3 µm con dimensioni del pixel di (150x150) µm2.
Già con questo primo prototipo si poteva vedere come la tecnologia SOI fosse
funzionante, ma anche come fosse necessario migliorare il processo produttivo.
La disponibilità di un processo produttivo a 0.15 µm FD-SOI da parte di OKI
Electric Industry Co. Ltd. Japan, ha aperto nuove possibilità nello sviluppo di sensori
a Pixel SOI con una risoluzione sufficientemente alta da essere utilizzati negli
esperimenti di fisica delle particelle e anche per imaging.
Finora sono stati realizzati 3 prototipi di rilevatori SOI progettati all’LBNL e
fabbricati dalla OKI. Verranno qui di seguito presentati sinteticamente i risultati
ottenuti con i primi 2 rivelatori per poi analizzare in dettaglio lo studio fatto sul terzo
rivelatore oggetto di questa tesi.
4.1 LDRD SOI 1
Figura 4.1: Layout del chip LDRD SOI 1
Il chip è formato da un substrato spesso 350 µm ad alta resistività di tipo n, con i
circuiti CMOS impiantati in un sottile strato di silicio di 40 nm che si trova sopra
ad uno strato di ossido di 200 nm. [4]
Figura 4.2: Sezione semplificata del chip SOI con tecnologia OKI
Capitolo 4 – Evoluzione tecnologica dell’SOI Pixel Detector
40
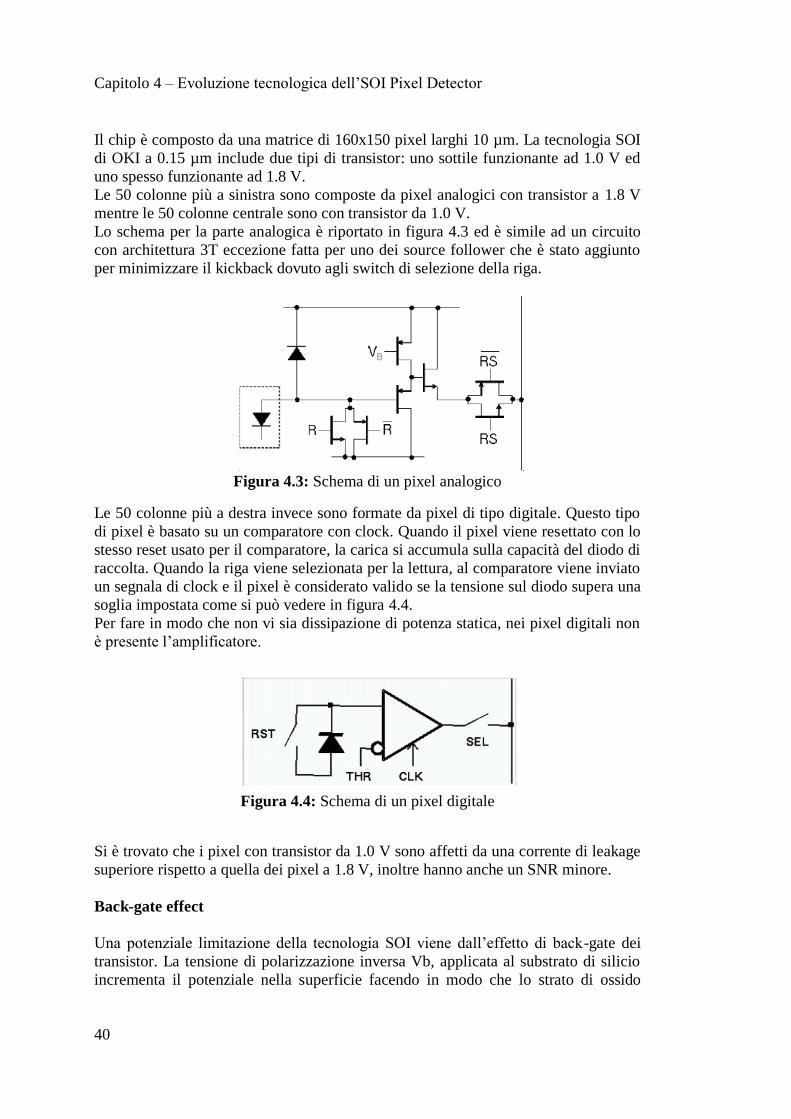
Il chip è composto da una matrice di 160x150 pixel larghi 10 µm. La tecnologia SOI
di OKI a 0.15 µm include due tipi di transistor: uno sottile funzionante ad 1.0 V ed
uno spesso funzionante ad 1.8 V.
Le 50 colonne più a sinistra sono composte da pixel analogici con transistor a 1.8 V
mentre le 50 colonne centrale sono con transistor da 1.0 V.
Lo schema per la parte analogica è riportato in figura 4.3 ed è simile ad un circuito
con architettura 3T eccezione fatta per uno dei source follower che è stato aggiunto
per minimizzare il kickback dovuto agli switch di selezione della riga.
Figura 4.3: Schema di un pixel analogico
Le 50 colonne più a destra invece sono formate da pixel di tipo digitale. Questo tipo
di pixel è basato su un comparatore con clock. Quando il pixel viene resettato con lo
stesso reset usato per il comparatore, la carica si accumula sulla capacità del diodo di
raccolta. Quando la riga viene selezionata per la lettura, al comparatore viene inviato
un segnala di clock e il pixel è considerato valido se la tensione sul diodo supera una
soglia impostata come si può vedere in figura 4.4.
Per fare in modo che non vi sia dissipazione di potenza statica, nei pixel digitali non
è presente l’amplificatore.
Figura 4.4: Schema di un pixel digitale
Si è trovato che i pixel con transistor da 1.0 V sono affetti da una corrente di leakage
superiore rispetto a quella dei pixel a 1.8 V, inoltre hanno anche un SNR minore.
Back-gate effect
Una potenziale limitazione della tecnologia SOI viene dall’effetto di back-gate dei
transistor. La tensione di polarizzazione inversa Vb, applicata al substrato di silicio
incrementa il potenziale nella superficie facendo in modo che lo strato di ossido

4.1 LDRD SOI 1
41
diventi un secondo gate per l’elettronica CMOS presente sopra; ciò causa uno shift
nella soglia del transistor per tensioni di svuotamento crescenti.
L’effetto è stato valutato su una struttura di test implementata nella periferia del chip.
Questa include MOSFET di tipo n e p, tutti con dimensioni W=50 µm e L=0.3 µm,
con differenti tipi di collegamento per il body (floating, collegato al source, collegato
al gate).
La figura 4.5 mostra la caratteristica Ids (Vgs) misurata su un MOSFET di tipo n per
tensioni di substrato Vd maggiori di 15 V. La tensione di soglia del transistor estratta
dalla caratteristica 𝐼𝑑𝑠(𝑉𝑔𝑠), shifta da Vt=0.24 V con Vd=1 V a Vt=0.07 V con
Vd=15V. Risultato questo che è consistente con un incremento dell’effetto di back-
gate. Un effetto analogo è stato anche misurato nel MOSFET di tipo p.
Figura 4.5: Shift della caratteristica di ingresso in funzione della tensione di
polarizzazione del substrato Vd
L’effetto di back-gate nell’area del chip è stato approfondito usando una simulazione
con il software TCAD. Si è usato un modello a 2 dimensioni di un vettore di 5 pixel,
includendo una geometria realistica per la regione di contatto del substrato al bordo
del pixel. Il substrato di tipo n è modellato con un livello di doping costante avente
una densità di atomi donori 6x1012
cm-3
, mentre i diodi dei vari pixel sono modellati
con impianti di tipo p poco profondi (500 nm di profondità) con un picco di
concentrazione del doping di 1x1020
cm-3
alla superficie del silicio che scende
secondo il profilo di una gaussiana lungo in substrato del silicio stesso.
Le caratteristiche di un singolo transistor alla periferia del chip sono state simulate in
funzione della tensione di polarizzazione del substrato.
In figura 4.6 si confrontano le tensioni di soglia di un n-MOSFET ottenute con la
simulazione con quelle ottenute tramite misure su transistor di test. Qualitativamente
i risultati sono coerenti all’interno di una certa soglia che dipende dai parametri del
processo.
Capitolo 4 – Evoluzione tecnologica dell’SOI Pixel Detector
42
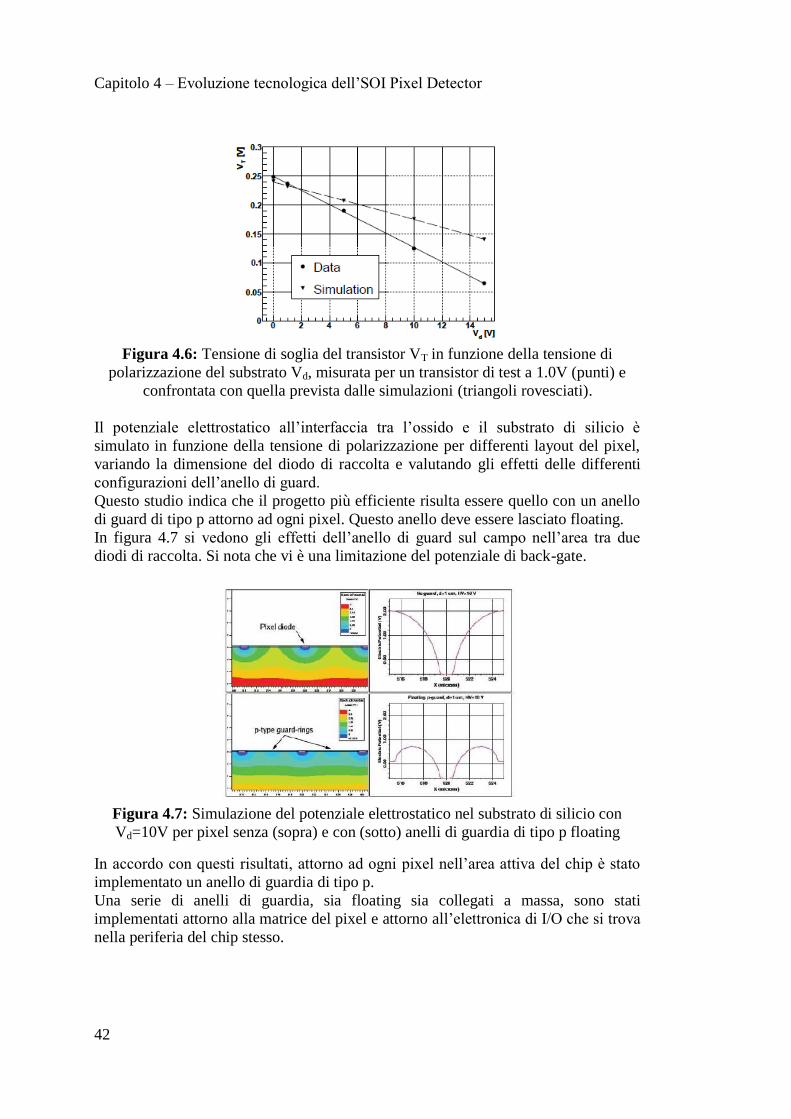
Figura 4.6: Tensione di soglia del transistor VT in funzione della tensione di
polarizzazione del substrato Vd, misurata per un transistor di test a 1.0V (punti) e
confrontata con quella prevista dalle simulazioni (triangoli rovesciati).
Il potenziale elettrostatico all’interfaccia tra l’ossido e il substrato di silicio è
simulato in funzione della tensione di polarizzazione per differenti layout del pixel,
variando la dimensione del diodo di raccolta e valutando gli effetti delle differenti
configurazioni dell’anello di guard.
Questo studio indica che il progetto più efficiente risulta essere quello con un anello
di guard di tipo p attorno ad ogni pixel. Questo anello deve essere lasciato floating.
In figura 4.7 si vedono gli effetti dell’anello di guard sul campo nell’area tra due
diodi di raccolta. Si nota che vi è una limitazione del potenziale di back-gate.
Figura 4.7: Simulazione del potenziale elettrostatico nel substrato di silicio con
Vd=10V per pixel senza (sopra) e con (sotto) anelli di guardia di tipo p floating
In accordo con questi risultati, attorno ad ogni pixel nell’area attiva del chip è stato
implementato un anello di guardia di tipo p.
Una serie di anelli di guardia, sia floating sia collegati a massa, sono stati
implementati attorno alla matrice del pixel e attorno all’elettronica di I/O che si trova
nella periferia del chip stesso.

4.1 LDRD SOI 1
43
Test con laser
La risposta della parte analogica è stata testata con un laser IR a 1060 nm, per
differenti valori di polarizzazione Vd. Il laser è stato focalizzato con uno spot di circa
20 um e impulsato per 30 us tra due successive letture.
È stata misurata l’ampiezza del segnale in una matrice 5x5 (50x50) µm2 centrata
attorno allo spot del laser. Il segnale misurato aumenta come 𝑉𝑑 , come ci si aspetta
dato che l’incremento della regione di svuotamento segue lo stesso andamento.
Questo fino a tensioni Vd di circa 9V, dove si ha saturazione. Il segnale inizia poi a
decrescere per tensione Vd>15V. Figura 4.8
Figura 4.8: Altezza dell’impulso di cluster normalizzato misurato a Vd=0.8V per un
laser a 1060 nm in funzione della tensione di substrato Vd
Questo andamento è causato dal back-gate del transistor ed è molto più evidente nei
transistor a 1.0V che in quelli a 1.8V.
La risoluzione spaziale del pixel analogico è stata determinata usando lo stesso laser
a 1060 nm questa volta focalizzato con uno spot di circa 5 µm. È stata effettuata una
scansione del pixel con uno shift del laser a step di 1 µm lungo una riga della
matrice. Per ogni posizione sono stati registrati 500 eventi.
La posizione del centro del laser è stata ricostruita dal baricentro della carica raccolta
dal chip e si è poi studiata la linearità tra la posizione media dei cluster e la posizione
dello spot del laser ottenuta dalla lettura dell’encoder che movimenta il laser stesso.
La risoluzione è estratta dall’estensione della posizione ricostruita del cluster per set
di eventi presi ad ogni punto della scansione. Figura 4.9

Capitolo 4 – Evoluzione tecnologica dell’SOI Pixel Detector
44
Figura 4.9: Distribuzione delle differenze tra la posizione di un laser con spot a 5um
e la posizione ricostruita del cluster nel pixel analogico.
L’intensità del laser è stata variata per ottenere diversi valori di SNR. Pixel con
larghezza di 10um hanno una risoluzione di 1 µm per SNR di 20 o maggiore. La
risoluzione è inversamente proporzionale al SNR come si può vedere in figura 4.10.
Figura 4.10: Risoluzione di un singolo punto in funzione del SNR ottenuta da una
scansione dei pixel analogici con un laser a 1060 nm e spot di 5 µm.
Test con fasci di particelle ad alta energia
Il chip è stato testato con un fascio di elettroni a 1.35 GeV al LBNL
Advanced Light Source (ALS).
I dati sono stati processati on-line da un programma basato su LabView che esegue
la lettura dei dati dal chip, sottrae i piedistalli e calcola il rumore. Successivamente
vengono poi elaborati online.
Ogni evento è scansionato per trovare pixel con un’ampiezza sopra una certa soglia
di rapporto segnale rumore. Si è usato in questo caso un valore di 4.5; i pixel
rumorosi sono così mascherati.
I pixel sono ordinati in funzione dell’ampiezza dell’impulso. I pixel adiacenti con un
rapporto segnale rumore >2.5 sono aggiunti al cluster in una matrice 5x5.
I cluster ovviamente non possono sovrapporsi e deve inoltre essere che i pixel
associati ad un cluster non siano interlacciati da altri pixel sopra la soglia.

4.1 LDRD SOI 1
45
I dati sono stati presi a diverse tensioni di svuotamento Vd, da 1V a 15V per la parte
analogica e fino a 30V per la parte digitale. La tensione di svuotamento usata
corrisponde ad una zona svuotata di spessore che va da 8um a 80um per Vd da 1 a
30V.
Si vede solo un piccolo background dovuto ai pixel rumorosi che sopravvivono al
taglio del rumore e al criterio con il quale vengono costruiti i cluster.
La molteplicità dei pixel in un cluster decresce con l’incremento della tensione di
svuotamento, mentre l’ampiezza del picco cresce fino a Vd=10V. Quando Vd
raggiunge circa i 15V il segnale del cluster e l’efficienza del chip decrescono, in
modo molto simile a quanto si è osservato con il laser.
Si è misurato un buon rapporto segnale rumore di circa 15 è stato misurato nella
parte analogica con i transistor a 1.8V e con 5V <Vd<15V.
Anche la sezione digitale del chip è risultata funzionante. I segnali del fascio sono
osservati applicando una tensione di svuotamento superiore a 20V per arrivare fino a
30V. Questo può essere spiegato considerando che il circuito di comparazione è
anch’esso affetto dal back-gate, ma il circuito digitale di ogni pixel è attivo solo
quando viene triggerato, cioè per tempi molto più brevi se confrontati con quelli
della parte digitale.
Sono necessarie tensioni di svuotamento maggiori sono necessarie per ottenere
segnali grandi abbastanza da superare la soglia dei comparatori.
I due effetti combinati assieme danno la migliore capacità di raccolta per
20V<Vd<30V. La figura 4.11 mostra la molteplicità dei successi nei pixel digitali per
eventi presi con e senza fascio a Vd=30V.
Figura 4.11: Molteplicità dei successi con fascio (marker con barra dell’errore) e
senza fascio (linea continua)
Un chiaro eccesso di successi può essere osservato in presenza di fascio come è
lecito aspettarsi. Il numero medio di pixel in un cluster decresce da 1.8 a 1.3 per Vd
che cresce da 20V a 30V. Tabella 4.1

Capitolo 4 – Evoluzione tecnologica dell’SOI Pixel Detector
46
Tabella 4.1: Riepilogo del test di fascio ALS nei pixel digitali
Test di Radiation Hardness
Un primo test è stato condotto con protoni a 30 MeV su singoli transistor. Il
chip è montato su una linea di fascio dietro un collimatore con diametro di 2.54 cm e
i terminali dei due transistor sotto test (uno di tipo p e uno di tipo n) sono connessi ad
un analizzatore di parametri per semiconduttori in modo che la caratteristica del
transistor in prova possa essere misurata tra uno step e l’altro dell’irraggiamento.
Durante i vari step i terminali dei transistor sono tenuti a massa. L’irraggiamento è
stato condotto con flusso di circa 6x107 p/cm
2, fino ad una fluenza totale di 2.5x10
12
p/cm2, corrispondenti ad una total dose di circa 600kRad.
La figura 4.11 mostra la variazione della soglia per il transistor di test nMOS in
funzione della fluenza dei protoni.
Figura 4.11: Tensione di soglia per un nMOS in funzione della fluenza di un fascio
di protoni a 30 MeV
Si è applicata all’inizio una tensione al substrato di Vd=5V, ma dopo una fluenza di
circa 1x1012
p/cm2 non è stato più possibile misurare le caratteristiche del transistor.
La tensione è stata così abbassata a Vd=1V ripristinando il normale funzionamento
dell’nMOS.
Questo effetto è stato interpretato come una conseguenza della carica di build-up
nello strato di ossido che si è formata a causa della radiazione la quale ha
effettivamente incrementato l’effetto del back-gate.

4.1 LDRD SOI 1
47
La variazione totale della soglia è infatti significativa (circa 100mV) anche per una
bassa tensione di polarizzazione del substrato (in questo caso pari a 1V).
L’effetto è tanto più grande di quanto ci si sarebbe aspettato se confrontato con il
danno da radiazione che si ottiene con un transistor con un ossido di gate sottile.
Risultati simili sono stati ottenuti con il pMOS.
Un secondo test è stato condotto con un chip completamente funzionante esposto ad
un fascio da 1 a 20 MeV di neutroni, con una fluenza totale di 1x1011
n/cm2.
Non è stato osservato alcun cambiamento per quanto riguarda il rumore della parte
analogica e non vi è stata alcuna variazione significativa nelle caratteristiche del
transistor.

Capitolo 4 – Evoluzione tecnologica dell’SOI Pixel Detector
48
4.2 LDRD SOI 2
Figura 4.11: Layout del chip LDRD SOI 2
Un secondo prototipo di sensore, il chip LDRD SOI 2, è stato sviluppato e
fabbricato nel 2008 dalla OKI con processo FD-SOI a 0.20 µm e ottimizzato per
avere basse correnti di leakage.
Il chip è un prototipo di 5x5 mm2 con un’area attiva di 3.5x3.5 mm
2 nella quale si
trova un array di 168x172 pixel di 20 µm. La matrice dei pixel è suddivisa in una
sezione di 40x172 pixel analogici con un’architettura di tipo 3T e in una sezione di
128x172 pixel digitali.
Il progetto è stato ottimizzato per permettere una lettura con un clock superiore a 50
MHz e la sezione digitale è stata dotata di uscite di tipo parallelo per permettere
letture di molti dati.
Come nel chip LDRD SOI 1 ogni pixel è circondato da un anello di guard di tipo p
lasciato floating; 2 anelli inoltre separano l’elettronica di periferia e la logica di I/O
dalla matrice di pixel. [5]
Test e risultati
I pixel analogici del chip sono stati testati con un protocollo molto simile a
quello usato per l’SOI 1. I primi test eseguiti in laboratorio con il laser mostrano un
differente comportamento nella raccolta della carica del segnale con applicata una
tensione di polarizzazione del substrato Vb. L’altezza dell’impulso cresce fino a
Vd=2-3V e poi satura rapidamente.
Il chip può lavorare correttamente fino a Vd=10V senza però mostrare un incremento
della carica raccolta.
Questo può essere attribuito al fatto che vi sia un incremento dell’effetto di back-gate
dovuto al diverso processo di fabbricazione o alla diversa configurazione dell’anello
di guardia.
I pixel analogici sono stati testati con successo anche con elettroni a 1.5 GeV
al LBNL ALS con un clock di 50 MHz, equivalente ad un tempo di integrazione di
137.6 µs per la matrice di pixel con dimensione 40x172.
Non sono state osservate differenze significative nella raccolta della carica con basse
frequenze del clock (alti tempi di integrazione). Si è ottenuto un S/N di circa 20
elettroni.
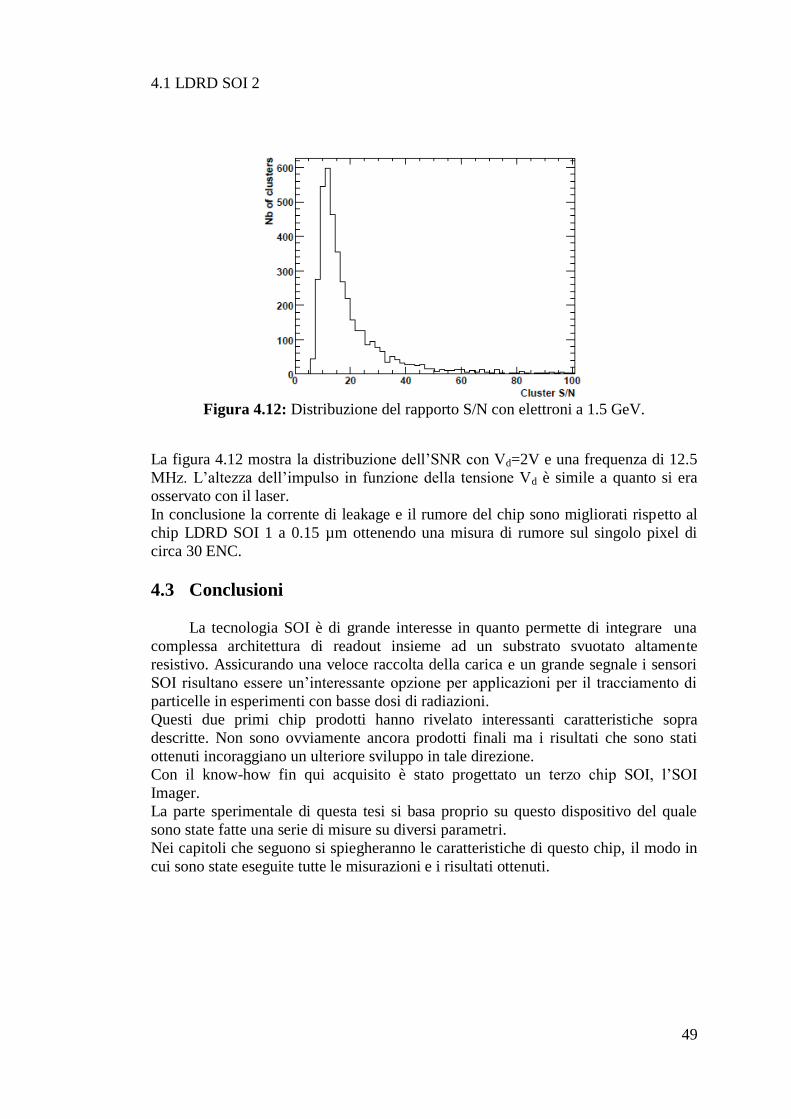
4.1 LDRD SOI 2
49
Figura 4.12: Distribuzione del rapporto S/N con elettroni a 1.5 GeV.
La figura 4.12 mostra la distribuzione dell’SNR con Vd=2V e una frequenza di 12.5
MHz. L’altezza dell’impulso in funzione della tensione Vd è simile a quanto si era
osservato con il laser.
In conclusione la corrente di leakage e il rumore del chip sono migliorati rispetto al
chip LDRD SOI 1 a 0.15 µm ottenendo una misura di rumore sul singolo pixel di
circa 30 ENC.
4.3 Conclusioni
La tecnologia SOI è di grande interesse in quanto permette di integrare una
complessa architettura di readout insieme ad un substrato svuotato altamente
resistivo. Assicurando una veloce raccolta della carica e un grande segnale i sensori
SOI risultano essere un’interessante opzione per applicazioni per il tracciamento di
particelle in esperimenti con basse dosi di radiazioni.
Questi due primi chip prodotti hanno rivelato interessanti caratteristiche sopra
descritte. Non sono ovviamente ancora prodotti finali ma i risultati che sono stati
ottenuti incoraggiano un ulteriore sviluppo in tale direzione.
Con il know-how fin qui acquisito è stato progettato un terzo chip SOI, l’SOI
Imager.
La parte sperimentale di questa tesi si basa proprio su questo dispositivo del quale
sono state fatte una serie di misure su diversi parametri.
Nei capitoli che seguono si spiegheranno le caratteristiche di questo chip, il modo in
cui sono state eseguite tutte le misurazioni e i risultati ottenuti.

Capitolo 4 – Evoluzione tecnologica dell’SOI Pixel Detector
50

51
5 Capitolo 5
SOI Imager
Figura 5.1: Layout del chip SOI Imager
Il chip SOI Imager è stato progettato a fine 2008 ed è stato poi prodotto dalla
OKI nel corso del 2009 con processo FD-SOI a 0.20 µm.
Il dispositivo ha un’area di (5x5) mm2 dei quali (3.2x3.2) mm
2 sono attivi e sono
formati da una matrice di 256x256 pixel di 13.75 µm per un totale di 65536 pixel
tutti analogici. Come si può subito notare questo è tra i tre il chip con il numero
maggiore di pixel.
Anche in questo caso ogni pixel è circondato da un anello di guardia di tipo p (P+
array); vi è poi una matrice di guardia nell’elettronica di I/O (P+ I/O) e infine vi è un
anello di guard sempre di tipo p all’esterno dell’elettronica (P+ outer). Figura 5.2.
Figura 5.2: Layout dei 3 anelli di guard
Al contrario di quanto avveniva nei primi 2 chip nei quali gli anelli di guardia erano
floating in questo progetto vi è la possibilità di scegliere la configurazione in modo
da poterli collegare a ground, tensione fissa oppure floating.
I 65536 pixel sono separati in 4 canali ciascuno di 64x256 pixel che corrispondono a
4 diverse uscite nel pinout del chip stesso.

Capitolo 5 – SOI Imager
52
5.1 Pixel Pinout
Possiamo vedere il pinout nelle figure 5.3 e 5.4.
Figura 5.3: Pinout SOI Imager metà superiore
Figura 5.4: Pinout SOI Imager metà inferiore
I piedini più importanti per il funzionamento del chip stesso sono i seguenti:
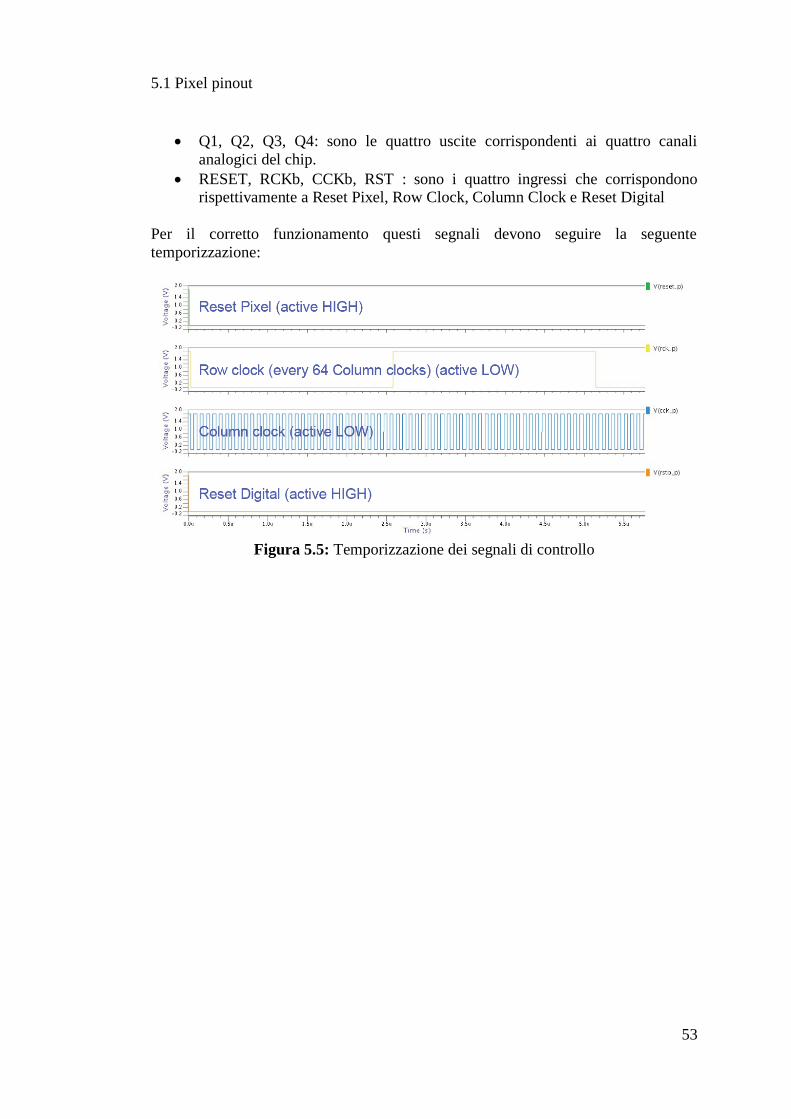
5.1 Pixel pinout
53
Q1, Q2, Q3, Q4: sono le quattro uscite corrispondenti ai quattro canali
analogici del chip.
RESET, RCKb, CCKb, RST : sono i quattro ingressi che corrispondono rispettivamente a Reset Pixel, Row Clock, Column Clock e Reset Digital
Per il corretto funzionamento questi segnali devono seguire la seguente
temporizzazione:
Figura 5.5: Temporizzazione dei segnali di controllo

Capitolo 5 – SOI Imager
54
5.2 Pixel Layout
Il singolo chip presenta una layout che è possibile vedere in Figura 5.6.
E’ possibile individuare il diodo di raccolta posto al centro del pixel con sopra lo
strato di metallizzazione e i 4 transistor che sono gli unici componenti attivi posti
sopra al pixel stesso.
Alla periferia del chip si nota il perimetro formato dall’impianto di guard di tipo p.
Anche se in questa immagine sembra un’entità isolata esso è collegato agli altri
guard dei pixel adiacenti formando così un reticolo sopra a tutto il rivelatore. Si nota
inoltre che anche sopra al guard è presente una metallizzazione molto larga che,
come si vedrà in seguito, non ha permesso di effettuare delle misure che sarebbero
state molto interessanti.
Figura 5.6: Pixel layout
Il circuito realizzato sopra il pixel che viene così a trovarsi nell’SOI è mostrato in
Figura 5.7.
Possiamo vedere che vi sono le due giunzioni p-n che rappresentano rispettivamente
il diodo di raccolta e il guard. Quest’ultimo è lasciato floating mentre il diodo di
raccolta è collegato al drain del nMOS di reset e al gate del pMOS.
Il circuito realizzato altro non è che una cella 3T solo che per la selezione della riga è
stato scelto di utilizzare una configurazione a pass-transistor.
Il transistor di reset deve essere attivato ogni qualvolta che vogliamo scaricare la
capacità del diodo e azzerare il segnale. Quest’ultimo entra sempre nel gate del
pMOS che realizza un amplificatore source follower il cui guadagno è circa unitario,
presenta un’amplificazione di corrente infinita e permette di disaccoppiare le due
parti di elettronica avendo un’impedenza di ingresso infinita e una di uscita molto
bassa.

5.2 Pixel layout
55
Gli ultimi due transistor posti in configurazione di pass-transistor servono per la
selezione della riga. Quando vengono attivati il segnale utile è portato in uscita e
prelevato dal terminale Q.
Tutti i transistor sono polarizzati con una corrente di 200 µA che è possibile variare
esternamente al detector stesso. Questo valore è quello consigliato dal costruttore.
Misure effettuate variando questa corrente mostrano che in effetti il valore 200 µA è
quello che massimizza l’SNR.
Figura 5.7: Schema circuitale del pixel
Tutti i segnali di controllo di questi transistor e il segnale di uscita non vengono
direttamente inviati al DAQ ma passano attraverso un’elettronica che è presente nella
mezzanine dove è bondato il chip.

Capitolo 5 – SOI Imager
56
5.3 Mezzanine board
La mezzanine board è la scheda nella quale viene montato il chip. Questa scheda
assolve fondamentalmente a tre funzioni:
Alimentazione del chip
Condizionamento dei segnali in ingresso (Dal DAQ al chip)
Condizionamento dai segnali in uscita (Dal chip al DAQ)
In Appendice 1 possiamo vedere lo schema completo della board. Analizziamo come
vengono condizionati i principali segnali.
Per quanto riguarda quelli in ingresso questi passano attraverso l’integrato
SN65LVDT386 che opera una decodifica da LVDT a segnale non differenziale.
La parte più interessante però riguarda il condizionamento dei segnali di uscita dal
chip; stiamo parlando delle uscite dei quattro canali.
La catena di componenti tra il chip e il DAQ che nello schema circuitale è
rappresentata dal blocco S_to_D_Buffer è così composta dal circuito di Appendice 2.
Il segnale Analog_Out proveniente dal chip entra nell’ingresso non invertente
dell’operazionale AD8011.
L’AD8011 è un amplificatore a bassissimo consumo di potenza e ad alta velocità
progettato per lavorare con tensione di alimentazione a +5V oppure con
alimentazione duale ±5V. Avendo una banda molto ampia, una bassa distorsione e
un basso consumo è l’ideale come amplificatore di tipo general purpose. Inoltre
garantisce una piattezza di guadagno pari a 0.1 dB fino a 25 MHz.
Nello schema viene usato in configurazione differenziale amplificando il segnale di
ingresso di un fattore 2 e shiftandolo di una quantità che viene impostata dall’LM317
modificando la R57.
In questo modo il segnale unipolare in uscita dal chip viene trasformato in un segnale
bipolare ed amplificato per essere poi inviato all’altro componente della catena; il THS4501.
Questo è un amplificatore differenziale della Texas Instruments usato per creare un
segnale di tipo differenziale che dovrà poi essere inviato al DAQ usando dei cavi
USB. Un segnale differenziale infatti presenta una maggiore immunità ai disturbi e al
rumore rispetto ad un segnale di modo comune.
Lo schema utilizzato è quello consigliato dal costruttore:
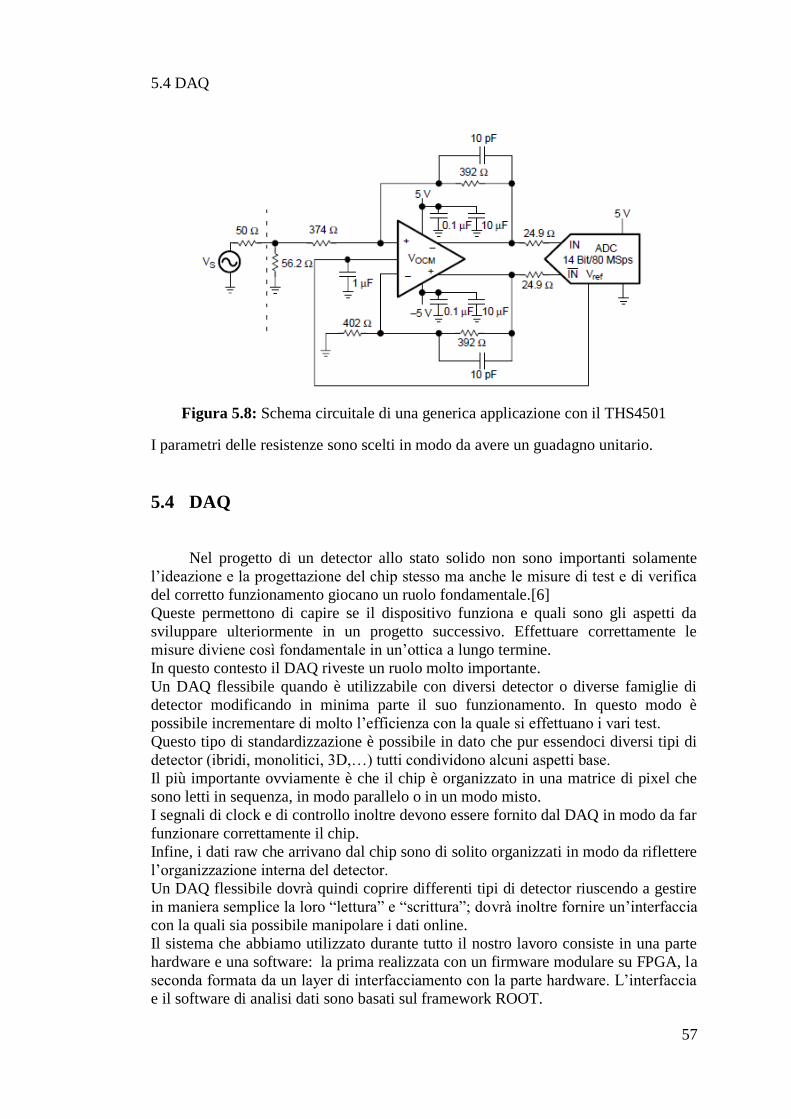
5.4 DAQ
57
Figura 5.8: Schema circuitale di una generica applicazione con il THS4501
I parametri delle resistenze sono scelti in modo da avere un guadagno unitario.
5.4 DAQ
Nel progetto di un detector allo stato solido non sono importanti solamente
l’ideazione e la progettazione del chip stesso ma anche le misure di test e di verifica
del corretto funzionamento giocano un ruolo fondamentale.[6]
Queste permettono di capire se il dispositivo funziona e quali sono gli aspetti da
sviluppare ulteriormente in un progetto successivo. Effettuare correttamente le
misure diviene così fondamentale in un’ottica a lungo termine.
In questo contesto il DAQ riveste un ruolo molto importante.
Un DAQ flessibile quando è utilizzabile con diversi detector o diverse famiglie di
detector modificando in minima parte il suo funzionamento. In questo modo è
possibile incrementare di molto l’efficienza con la quale si effettuano i vari test.
Questo tipo di standardizzazione è possibile in dato che pur essendoci diversi tipi di
detector (ibridi, monolitici, 3D,…) tutti condividono alcuni aspetti base.
Il più importante ovviamente è che il chip è organizzato in una matrice di pixel che
sono letti in sequenza, in modo parallelo o in un modo misto.
I segnali di clock e di controllo inoltre devono essere fornito dal DAQ in modo da far
funzionare correttamente il chip.
Infine, i dati raw che arrivano dal chip sono di solito organizzati in modo da riflettere
l’organizzazione interna del detector.
Un DAQ flessibile dovrà quindi coprire differenti tipi di detector riuscendo a gestire
in maniera semplice la loro “lettura” e “scrittura”; dovrà inoltre fornire un’interfaccia
con la quali sia possibile manipolare i dati online.
Il sistema che abbiamo utilizzato durante tutto il nostro lavoro consiste in una parte
hardware e una software: la prima realizzata con un firmware modulare su FPGA, la
seconda formata da un layer di interfacciamento con la parte hardware. L’interfaccia
e il software di analisi dati sono basati sul framework ROOT.

Capitolo 5 – SOI Imager
58
Il DAQ è stato progettato per essere compatto e di facile utilizzo e con un uso
minimo di cavi esterni che lo rendono adatto ad essere usato con setup di
irraggiamento o test di fascio, ambienti nei quali risulta difficile operare con sistemi
di grandi dimensioni.
Analog board
Il principale componente hardware è la scheda di acquisizione analogica.
Questa scheda include 5 canali analogici indipendenti, ognuno dei quali è composto
da uno stadio di ingresso analogico con guadagno ed impedenza variabile e da un
ADC a 14 bit funzionante a 100MS/s.
Un preciso generatore di clock provvede a generare un segnale di riferimento a
100MHz; questo clock può essere usato per pilotare gli ADC e può anche essere
portato fuori dalla scheda stessa. Per le comunicazioni digitali sono state
implementate 32 linee operanti con protocollo LVDS (16 di ingresso e 16 di uscita),
mentre altre 25 linee sono libere di essere programmate in entrambe le direzioni. Un
connettore a 10 pin porta in uscita 3 tensioni fisse (5, 3.3 e 2.5V) e due tensioni
programmabili le quali possono essere usate per alimentare e per fornire tensioni di
riferimento al detector.
Digital board
La parte analogica è connessa ad una scheda di sviluppo commerciale con
FPGA attraverso connettori ad alta velocità SAMTEC in modo da avere un sistema
compatto e robusto.
La scheda dell’FPGA contiene, oltre all’FPGA stessa, un bus di accesso a 64 bit ed
una memoria DDRAM (64 Mbytes), un completo set di dispostivi di comunicazione
(Ethernet, USB, RS232, Rocket I/O…), un generatore di clock e molti altri circuiti di
supporto.
La FPGA montata è una Xilinx Virtex modello LX50 o in alternativa LX110. Questo
approccio modulare permette di usare la più recente FPGA presente sul mercato
senza dover riprogettare la scheda di supporto. Inoltre fornisce un insieme di
soluzioni di comunicazioni per il controllo attraverso il PC.

5.4 DAQ
59
Figura 5.9: Schema del sistema di acquisizione. La scheda di sviluppo della FPGA
(rossa) è collegata alla scheda analogica (verde) contenente i 5 ADC e le linee di I/O.
Alla sinistra una tipica mezzanine board
Il modo standard per comandare il sistema e ricevere i dati è attraverso la
connessione USB 2.0 attraverso un computer di controllo il quale permette uno
stream continuo di dati di circa 40 Mbyte/s.
Mezzanine
Il chip è solitamente montato e bondato su una scheda fatta su misura per
ogni chip, chiamata mezzanine che contiene l’elettronica ausiliaria specifica per ogni
chip.
Mentre queste schede possono essere molto diverse l’una dall’altra, la connessione
tra la mezzanine e il sistema di acquisizione rimane sempre la stessa, sia per i segnali
analogici che per quelli digitali, assicurando così la compatibilità tra tutti i chip e il
DAQ.
Canali analogici
La parte analogica della catena di elettronica è quella nella quale è stato fatto
più lavoro in modo da mantenere il rumore il più vicino possibile al limite teorico. Il
percorso del segnale analogico parte nella mezzanine board con uno stadio
buffer/amplificatore il cui ingresso è collegato al segnale di uscita del chip.
Questo primo stadio deve essere perfettamente accoppiato con il chip; inoltre
essendo l’intero sistema ottimizzato per avere uno range del segnale di 2Vpp questo
stadio deve essere capace sia di amplificare il segnale sia di creare un offeset in
modo da massimizzare il range dinamico del DAQ.
Il segnale all’uscita del primo stadio è inviato ad una linea differenziale usando uno
standard driver differenziale (THS4501); i segnali differenziali sono poi connessi alla
scheda madre attraverso una coppia di cavi commerciali USB che hanno dimostrato
un’ottima capacità nel trasporto di segnali digitali ad una frequenza fino a 100 MHz.
Nella scheda del DAQ il segnale è bufferizzato attraverso uno stadio differenziale
con una banda a 300 MHz (THS4503), mentre un secondo filtro può essere usato per
limitare la banda da 10 a 100 MHz. Figura 5.10.

Capitolo 5 – SOI Imager
60
Figura 5.10: Stadio differenziale e stadio di filtro prima degli ADC
Firmware
Il firmware è stato scritto in modo da essere compatibile con l’obiettivo di
avere un sistema il più flessibile possibile. Per fare in modo che questo firmware sia
funzionante con diversi detector è stato diviso in blocchi indipendenti, che
permettono un facile upgrade del sistema ogni volta che un nuovo chip è pronto.
Il sistema di controllo e di comunicazione è progettato attorno ad un’unità di
controllo USB 2.0 che comunica con il chip di Cypress USB 2.0
L’unità master dell’USB gestisce un bus interno a 16 bit al quale tutte la unità del
firmware devono collegarsi se vogliono compiere operazioni di lettura o scrittura con
il computer di controllo.
L’unità di connessione è gestita da un modulo di interfaccia standard che interagisce
con il bus master, provvedendo ad un handshaking trasparente e permettendo così
una facile e diretta condivisione del bus in entrambe le direzioni.
I processi della parte di acquisizione controllano i dati che arrivano dagli ADC e/o
dalle linee digitali, in accordo a quanto scritto dentro ai registri.
I dati acquisiti sono serializzati e salvati in un buffer FIFO interno ad alta velocità
con una capacità di 64k parole. Quando si rende necessario un buffer più grande, si ricorre ad una SDRAM esterna da 64Mbytes.
I dati salvati nel buffer FIFO sono impachettati in accordo con il chip in uso, e quindi
inviati attraverso il bus alla porta USB. Il costruttore del pacchetto usa i parametri del
chip (numero di pixel, canali …) in modo da costruire il pacchetto in maniera
appropriata facendo in modo che il software possa ricostruire correttamente la
geometria del dispositivo una volta che i dati siano stati inviati al PC di controllo.
Con questo setup, su una connessione standard con USB 2.0 è stata misurata una
velocità di 38 MBbyte/s senza alcun tipo di rallentamenti del flusso dati.
Quello che cambia da un chip all’altro sono i segnali di pilotaggio e l’organizzazione
dei dati in uscita dal chip. Come è stato già mostrato, i dati sono codificati in accordo
con i settaggi che sono impostati mediante il software di controllo.

5.4 DAQ
61
Tutta l’acquisizione è sincronizzata attraverso questo set di segnali, senza nessun
collegamento diretto al detector reale. Un’unità dedicata, il driver, è fatto su misura
per ogni chip che vogliamo utilizzare; queste unità generano sia i segnali di controllo
per pilotare il chip sia i corrispondenti segnali di stato da inviare al sistema di
acquisizione.
Essendo il sistema modulare e basato su questo semplice standard di segnali di
interfaccia, per ogni nuovo chip è sufficiente implementare il rispettivo driver e
aggiungerlo poi al firmware, mantenendo così la compatibilità con i vecchi chip.
Oltre all’ingresso per il trigger esterno vi è un trigger interno programmabile con un
range che va da 10 KHz a 1/10 Hz.
Software
Il maggior sforzo per rendere il più semplice possibile la gestione di diversi
pixel detector è stato fatto a livello software. L’idea era di astrarre completamente i
dati dal detector stesso, permettendo l’implementazione di test e analisi capaci di
funzionare per ogni detector supportato dall’hardware senza alcuna modifica. I livelli
base del software permettono tutte le comunicazioni verso e da il DAQ,
implementando sia un buffer multithread sia un buffer parallelo in modo da
ottimizzare il throughput dei dati.
I livelli superiori del software, che sono basati sul framework ROOT, provvedono a
dare al programma un’interfaccia simile a quella di Lab View e al tempo stesso la
rendono programmabile dall’utente.
La struttura base consiste in un array dinamico usato per salvare i dati dal detector,
insieme alle informazioni come temporizzazioni e orientamento spaziale del chip
stesso. Questi dati possono essere di ogni tipo (byte, word, float …) e rappresentano
una perfetta copia dei dati ricevuti dal chip; non solo i valori ma anche la posizione
geometrica di ogni pixel è accuratamente salvata.
Questo è reso possibile da un livello che prende i dati dalla scheda di acquisizione e
li riorganizza in accordo con la descrizione del detector.
La descrizione del detector è la controparte software di quello che nel firmware è il
dirver: è una struttura dati che descrive come i dati escono dal detector e come
devono essere riorganizzati per ricostruire la reale posizione dei pixel.
Le operazioni più comuni come per esempio la sottrazione dei piedistalli, sono
direttamente implementate come operatori su oggetti.

Capitolo 5 – SOI Imager
62
Figura 5.11: Interfaccia grafica
L’interfaccia grafica è completamente basata sulle classi GUI di ROOT. I
componenti originali di ROOT sono stati incapsulati dentro ad un oggetto front-end
per ottenere una gestione semplificata e un’interazione più semplice.
Questi oggetti grafici possono essere posizionati nel workspace virtuale senza un
gestore del layout ma solamente usando dei parametri per identificarne la posizione.
Sono implementati anche grafici che permettono di avere una rappresentazione
visiva dei dati che stanno arrivando real-time dal detector.

5.5 Uso del DAQ
63
5.5 Uso del DAQ
Prima di effettuare una misura è necessario impostare dei parametri che
saranno poi inviati tramite USB alla FPGA del DAQ.
In Figura 5.12 possiamo vedere quali sono i parametri da impostare:
Figura 5.12: Particolare interfaccia grafica: impostazioni FPGA
I parametri che più ci interessano sono la frequenza del clock, il Delay e il Nb. of
average; questi ultimi saranno scelti in base alla frequenza impostata nell’apposito
campo.
La frequenza impostiamo è la frequenza con la quale vengono letti i singoli pixel.
Essi vengono azzerati con un periodo di reset parti a:
𝑡𝑟𝑒𝑠 =1
𝐶𝑙𝑜𝑐𝑘 𝑓𝑟𝑒𝑞𝑢𝑒𝑛𝑐𝑦∗ 65536
Successivamente vengono letti in sequenza. Essendo il segnale di reset lo stesso per
tutti i pixel si può capire come i pixel che verranno letti per ultimi saranno integrati
per un tempo più lungo.
Osserviamo adesso la figura 5.13.

Capitolo 5 – SOI Imager
64
Figura 5.13: Segnali di controllo lettura dati
Il segnale viola rappresenta il segnale analogico dei dati serializzati che arrivano dai
pixel del chip. La parte alta rappresenta un pixel che è stato illuminato da una
sorgente. Il segnale azzurro invece è un segnale di controllo della lettura. La FPGA
legge dagli ADC i dati solo quanto questo segnale è alto. Come si può vedere dalla
figura in questo caso stiamo leggendo solo l’ultima parte del segnale; inoltre non
stiamo leggendo solo un campione ma più di uno che poi verranno mediati per
ottenere il valore del segnale.
Il valore Delay non fa altro che spostare il segnale azzurro mentre il valore Nb. of
average ne allarga la parte alta.
I segnali in questa figura corrispondono proprio alle impostazioni di Figura 5.12.
Se invece impostiamo 0 sia come valore di Delay che come Nb. of average
otteniamo, alla stessa frequenza, un pattern come quello di Figura 5.14.

5.5 Uso del DAQ
65
Figura 5.14: Segnali di controllo lettura dati
In questo caso il segnale viene letto una sola volta per ogni pixel in corrispondenza
del segnale azzurro alto. Impostando in questo modo il DAQ si può capire come si
otterrebbe una misura non corretta: infatti in questo caso si andrebbe a leggere il
segnale quando questo è ancora nel transitorio di salita.
Queste misure sono state ripetute per diverse frequenze ricavando una tabella che poi
è stata utilizzata durante tutte le misure effettuate.
Frequenza [MHz] Delay Avg
12.5 5 2
6.25 14 3
Non è possibile allungare troppo il tempo di lettura altrimenti si andrebbe a creare
interferenza tra i dati di un pixel e i dati di quello successivo.
Dopo aver impostato i valori tramite il pulsante Set FPGA li si invia alla FPGA del
DAQ in modo che questa venga correttamente impostata. A questo punto il DAQ è
pronto ad acquisire i dati.
A questo punto è necessario decidere come interpretare i dati che arrivano al
software.

Capitolo 5 – SOI Imager
66
Figura 5.15: Particolare interfaccia grafica: impostazioni di acquisizione
Come si vede in Figura 5.15 ci sono 3 scelte possibili:
Raw data
Pedestal run
Subtract pedestal
Raw data
In questo caso i dati vengono visualizzati e, volendo, anche salvati così come
arrivano dal chip.
Figura 5.16 Raw Data
La Figura 5.16 rappresenta proprio l’ampiezza dei segnali provenienti dai 65536
pixel organizzati in una matrice 256x256 nel formato RAW di un’immagine di buio.

5.5 Uso del DAQ
67
Quello che si vorrebbe è che il livello dei segnali di un’immagine di buio fosse circa
zero dato che viene preso come livello di riferimento. Per fare ciò si devono usare in
sequenza l’acquisizione Pedestal Run e poi Subtract Pedestal.
Pedestal Run
Lanciando questo tipo di acquisizione i dati letti dal software vengono
interpretati come livelli di buio e vengono salvati. Quando si effettua la misura dei
piedistalli si prendono solitamente un centinaio di acquisizioni che vengono poi
mediate per ottenere l’array di piedistalli. Questi N segnali salvati saranno distribuiti
secondo una gaussiana con una certa media e varianza. La media rappresenta proprio
l’ampiezza del piedistallo mentre la varianza rappresenta il rumore ad esso associato.
Subtract Pedestal
Con questo tipo di acquisizione ai dati letti dal software vengono sottratti i
piedistalli ottenuti come risultato del pedestal run. Lanciando questa acquisizione al
buio come fatto con i piedistalli si otterrebbe un valore medio dei dati che è circa
zero come si vede in Figura 5.17
Figura 5.17 Subtract pedestal
Quello rappresentato altro non è che il livello dei pixel una volta che sono stati
sottratti i piedistalli. Prima di effettuare una misura con una sorgente è quindi
necessario misurare i piedistalli con una misura di buio che farà da riferimento per le
successive misure.

Capitolo 5 – SOI Imager
68

69
6 Capitolo 6
Misure di caratterizzazione del chip
Tutte le misure sono state effettuate collegando la mezzanine board al DAQ
attraverso 4 cavi per la trasmissione di segnali differenziali (uno per ogni canale del
chip). Il DAQ è collegato al PC con un cavo USB per trasmettere i dati acquisiti che
vengono interpretati da un programma COOL DAQ sviluppato con framework
ROOT.
Figura 6.1: Mezzanine board con chip montato e pronto per le misure
Queste misure verranno utilizzate per caratterizzare il rivelatore.
Come prima cosa si misurerà la capacità per conoscere l’ampiezza della zona
svuotata in funzione della tensione di substrato applicata Vb. Successivamente una
misura I-V darà la corrente di leakage del diodo permettendo di ricavare la tensione
di break down del diodo stesso.
Sarà poi misurato il noise del chip e, per finire, saranno fatte delle misure di
calibrazione per mettere in relazione carica raccolta e ADCcnts misurati.

Capitolo 6 – Misure di caratterizzazione del chip
70
6.1 Misura C-V// I-V
Prima di effettuare la misura di capacità è stata ricavata quella che dovrebbe
essere la profondità di svuotamento teorica mediante la formula:
𝑊 = 2 ∙ 𝜀𝑠 ∙ 𝑉𝑏𝑖 − 𝑉𝑑
𝑞 ∙ 𝑁𝐵 (6.1)
dove:
W = depletion depth
εs(F/cm)= 1.04·10-12
NB (cm-3
) = 6·1012
(fornita dalla OKI => = 700 ·cm)
q = 1.6·10-19
C
Vbi = 0.6V (trascurabile per Vd grandi)
Vd = tensione di svuotamento (depletion)
µn = mobilità elettrone = 1500cm2/V·s
La caratterizzazione di C-V è stata fatta misurando la capacità totale (C) del chip in
funzione di Vd; C varia con lo svuotamento, secondo la formula della capacità di un
condensatore a facce piane parallele.
È stato utilizzato il misuratore Agilent 4284 (LCR Meter) appoggiando il chip
sbondato al piatto della probe station.
Per svuotare il chip GBAR (matrice di guard-ring attorno ai pixel) è tenuto fisso a
massa e una Vd crescente è applicata al backside del rivelatore.
Le misure sono state fatte applicando la tensione di svuotamento direttamente al
piatto della probe station oppure mediante il pin n+. In entrambi i casi si sono
ottenuti gli stessi risultati.
𝑊 =𝐴 ∙ 𝜀𝑠
𝐶
Con:
A = area del chip
εs(F/cm) = 1.04·10-12
Sono stati poi confrontati i risultati delle misure con le stime teoriche derivate dalla
formula teorica ottenendo la Figura 6.1.
Come si può facilmente vedere vi è una grande differenza tra quello che è il valore
calcolato e quello misurato. Le stesse misure sono state ripetute con il chip SOI2
(realizzato con la stessa tecnologia dell’SOI Imager). Essendo questi due dispostivi
realizzati sullo stesso tipo di silicio, risultati delle misure simili permettono di
affermare che il nuovo dispositivo non presenta difetti fisici di realizzazione.
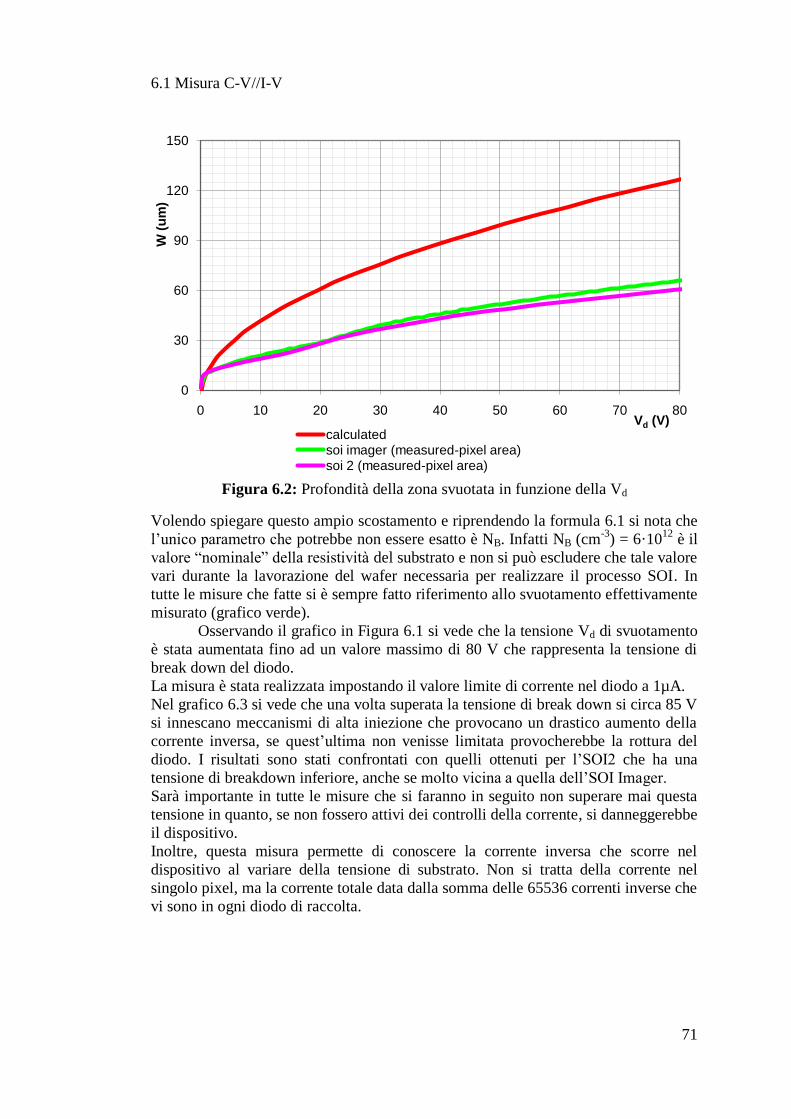
6.1 Misura C-V//I-V
71
Figura 6.2: Profondità della zona svuotata in funzione della Vd
Volendo spiegare questo ampio scostamento e riprendendo la formula 6.1 si nota che
l’unico parametro che potrebbe non essere esatto è NB. Infatti NB (cm-3
) = 6·1012
è il
valore “nominale” della resistività del substrato e non si può escludere che tale valore
vari durante la lavorazione del wafer necessaria per realizzare il processo SOI. In
tutte le misure che fatte si è sempre fatto riferimento allo svuotamento effettivamente
misurato (grafico verde).
Osservando il grafico in Figura 6.1 si vede che la tensione Vd di svuotamento
è stata aumentata fino ad un valore massimo di 80 V che rappresenta la tensione di
break down del diodo.
La misura è stata realizzata impostando il valore limite di corrente nel diodo a 1µA.
Nel grafico 6.3 si vede che una volta superata la tensione di break down si circa 85 V
si innescano meccanismi di alta iniezione che provocano un drastico aumento della
corrente inversa, se quest’ultima non venisse limitata provocherebbe la rottura del
diodo. I risultati sono stati confrontati con quelli ottenuti per l’SOI2 che ha una
tensione di breakdown inferiore, anche se molto vicina a quella dell’SOI Imager.
Sarà importante in tutte le misure che si faranno in seguito non superare mai questa
tensione in quanto, se non fossero attivi dei controlli della corrente, si danneggerebbe
il dispositivo.
Inoltre, questa misura permette di conoscere la corrente inversa che scorre nel
dispositivo al variare della tensione di substrato. Non si tratta della corrente nel
singolo pixel, ma la corrente totale data dalla somma delle 65536 correnti inverse che
vi sono in ogni diodo di raccolta.
0
30
60
90
120
150
0 10 20 30 40 50 60 70 80
W (
um
)
Vd (V)calculatedsoi imager (measured-pixel area)soi 2 (measured-pixel area)

Capitolo 6 – Misure di caratterizzazione del chip
72
Figura 6.3: Corrente inversa nel diodo in funzione della Vd
1,E-10
1,E-09
1,E-08
1,E-07
1,E-06
1,E-05
0 20 40 60 80 100
I (A
)
Vd (V)SOI2
SOI imager

6.2 Misure di Noise
73
6.2 Misure di Noise
In condizioni operative, al segnale da misurare si sovrappone un rumore che è
dato dal contributo del rumore generato dal chip e dal rumore generato dalla catena
di elettronica (vedi Appendice 2).
Quello che si vuole fare è misurare sia il rumore totale di chip+elettronica sia quello
della sola elettronica, in modo da poter isolare il contributo di rumore del solo chip.
Per poter misurare il rumore della catena di elettronica è stata utilizzata una
mezzanine board prima che il chip venisse montato; collegandola al sistema DAQ è
stato misurato un rumore pari a:
NOISEel = 2.8 ADCcnts
Noto questo valore, sono state effettuate misure di rumore totale in funzione della
tensione di substrato in modo da vedere quale valore di Vd minimizza il rumore.
Le misure sono state ripetute per due diversi valori di Ibias: Ibias=150µA e
Ibias=200µA.
I risultati sono riportati nella Tabella 6.1.
200µA 150µA
Vd Noise (TOT) Noise (TOT)
3 5,28 7,18
4 4,77 5,90
5 4,68 5,64
7 4,83 5,83
10 4,72 5,54
15 5,02 5,91
20 5,15 6,66
35 6,20 7,59
50 7,87 10,79
Tabella 6.1: Noise totale in funzione della tensione Vd
I dati della Tabella 6.1 sono riportati sotto forma di grafico in Figura 6.3

Capitolo 6 – Misure di caratterizzazione del chip
74
Figura 6.4: Noise totale in funzione della Vd
Si vede che il Noise di Figura 6.4 presenta un minimo per Vd~10 V e corrente di
polarizzazione di 200 µA. Questo è coerente con le informazioni di utilizzo fornite
dal progettista che consiglia di impostare la corrente Ibias=200 µA.
Noto il valore di rumore dell’elettronica si può sottrarlo quadraticamente al rumore
totale secondo la relazione:
NOISEchip2 = NOISETOT
2 – NOISEel
2
Si ottengono così la Tabella 6.2 e la Figura 6.5 che illustrano il legame tra tensione
applicata al substrato e rumore del chip.
Tabella 6.2: Noise del rivelatore in funzione della tensione Vd
3
4
5
6
7
8
9
10
11
0 10 20 30 40 50
No
ise
(A
DC
cn
ts)
Vd (V)
200uA 150uA
200µA 150µA
Vd Noise (CHIP) Noise (CHIP)
3 4,48 6,62
4 3,87 5,19
5 3,75 4,91
7 3,94 5,12
10 3,80 4,78
15 4,17 5,21
20 4,33 6,05
35 5,54 7,06
50 7,36 10,42
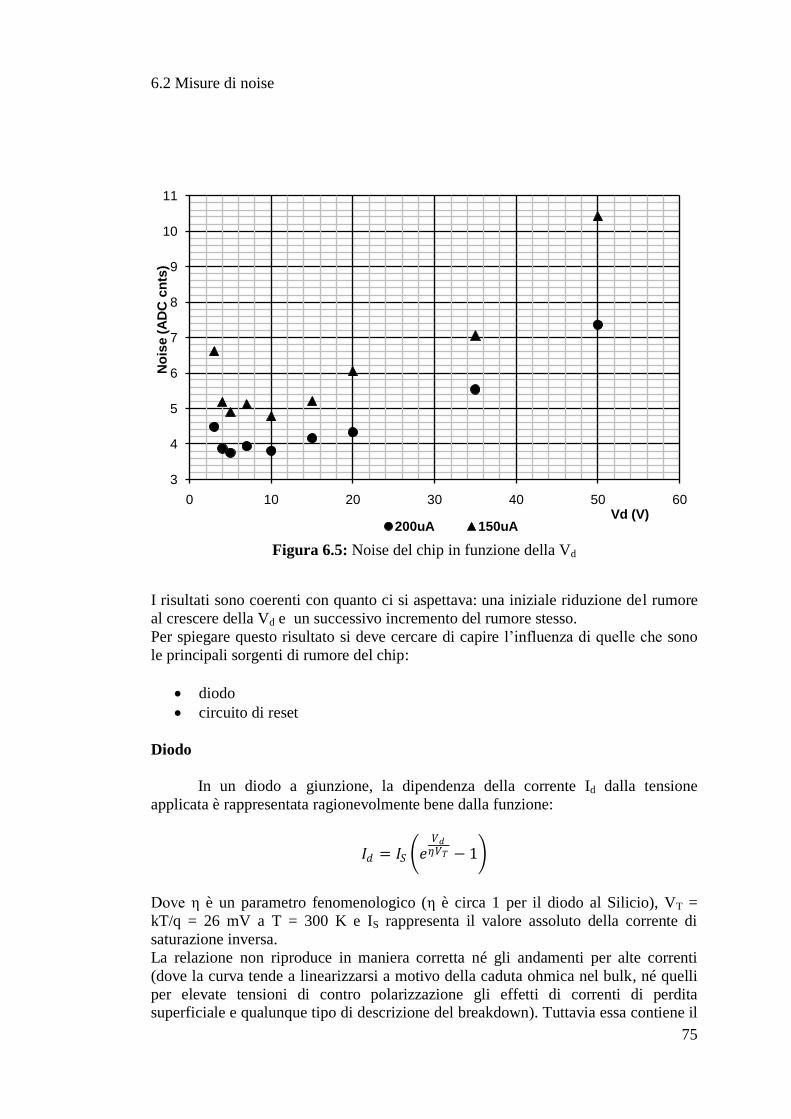
6.2 Misure di noise
75
Figura 6.5: Noise del chip in funzione della Vd
I risultati sono coerenti con quanto ci si aspettava: una iniziale riduzione del rumore
al crescere della Vd e un successivo incremento del rumore stesso.
Per spiegare questo risultato si deve cercare di capire l’influenza di quelle che sono
le principali sorgenti di rumore del chip:
diodo
circuito di reset
Diodo
In un diodo a giunzione, la dipendenza della corrente Id dalla tensione
applicata è rappresentata ragionevolmente bene dalla funzione:
𝐼𝑑 = 𝐼𝑆 𝑒𝑉𝑑𝜂𝑉𝑇 − 1
Dove η è un parametro fenomenologico (η è circa 1 per il diodo al Silicio), VT =
kT/q = 26 mV a T = 300 K e IS rappresenta il valore assoluto della corrente di
saturazione inversa.
La relazione non riproduce in maniera corretta né gli andamenti per alte correnti
(dove la curva tende a linearizzarsi a motivo della caduta ohmica nel bulk, né quelli
per elevate tensioni di contro polarizzazione gli effetti di correnti di perdita superficiale e qualunque tipo di descrizione del breakdown). Tuttavia essa contiene il
3
4
5
6
7
8
9
10
11
0 10 20 30 40 50 60
No
ise (
AD
C c
nts
)
Vd (V)200uA 150uA
Capitolo 6 – Misure di caratterizzazione del chip
76
grosso dell'informazione per quanto riguarda il rumore shot nel diodo e le
conclusioni che se ne traggono, per quanto riguarda il rumore, descrivono bene gli
andamenti osservati. In particolare la relazione ricorda che la corrente stazionaria nel
diodo a giunzione, per tutti i punti di lavoro, in realtà presenta sempre due contributi,
più o meno importanti a seconda di Vd: un contributo 𝐼𝑠 ∙ 𝑒𝑉𝑑𝜂𝑉𝑇 di corrente diretta
dovuta al superamento da parte dei maggioritari della barriera e un contributo −𝐼𝑠 costante dovuto alla corrente di saturazione inversa costituita dai minoritari prodotti
per effetto termico nel materiale aiutati ad attraversare la barriera dal campo elettrico
a loro favorevole. Poichè le due correnti traggono origine da due fenomeni
totalmente indipendenti, le densità spettrali di rumore ad esse associate vanno
sommate se si vuole considerare l'effetto complessivo. Precisamente per lo spettro di
potenza in corrente si trova:
𝑤𝑛𝑑 = 2𝑞𝐼𝑆𝑒
𝑉𝑑𝜂𝑉𝑇 + 2𝑞𝐼𝑆
dove il primo termine rappresenta lo spettro di potenza della corrente dei
maggioritari e il secondo quello della corrente dei minoritari. Per entrambi i
contributi, la descrizione tramite l’equazione appena mostrata, che equivale ad
assumere correnti caratterizzate da full shot noise, risulta essere sufficientemente
accurata.
In condizioni di polarizzazione inversa, tale da rendere praticamente trascurabile il
primo dei due termini, abbiamo:
𝑤𝑛𝑑 𝑉𝑑 ≪ −𝑘𝑇/𝑞 = 2𝑞𝐼𝑆
risultato praticamente ovvio.
In condizioni di polarizzazione diretta, cioè quando 𝑉𝑑 ≫ 𝑘𝑇/𝑞, abbiamo:
𝑤𝑛𝑑 𝑉𝑑 ≫ 𝑘𝑇/𝑞 = 2𝑞𝐼𝑆𝑒
𝑉𝐷𝜂𝑉𝑇
Il diodo nel nostro rivelatore funziona con polarizzazione inversa quindi la densità
spettrale di rumore risulta proporzionale alla corrente inversa di saturazione.
Cerchiamo di legare questa quantità alla tensione di polarizzazione inversa Vd.
Riprendendo:
𝐼𝑆 = 𝑞𝐴𝑛𝑖
2
𝜏𝑔
2𝑞𝜖𝑆𝜖0𝑞
𝑁𝐷𝑉𝑑
Vediamo che 𝑤𝑛𝑑 ∝ 𝑉𝑑

6.2 Misure di noise
77
Circuito di Reset
Durante il reset i transistor M3 e M4 (Figura 5.7) sono spenti; un impulso di
tensione positiva è applicata al gate di M1. Questo transistor raggiunge la saturazione
in tempi molto ridotti così rimane per tutta la durata del reset. Se il tempo di reset è
molto più grande del settling time (tempo necessario dall’applicazione dell’impulso
di reset affinché la corrente erogata dal transistor eguagli quella di leakage del
diodo), il contributo in potenza del rumore può essere calcolato come:
𝑤𝑛𝑟𝑒𝑠 =
𝐾𝑇
𝐶𝑑
dove k rappresenta la costante di Boltzmann, T la temperatura in Kelvin e 𝐶𝑑 la capacità totale associata al nodo di ingresso del source follower. In un sistema reale,
il tempo di reset non è sufficientemente lungo da permettere la condizione indicata,
la potenza di rumore subisce quindi una variazione divenendo:
𝑤𝑛𝑟𝑒𝑠 =
1
2
𝐾𝑇
𝐶𝑑
la scelta di una delle due espressioni presentate dipende, quindi, dalla frequenza di
lavoro.
La capacità 𝐶𝑑 al nodo di ingresso del source follower è data dalla somma della capacità di ingresso del MOS più la capacità associata al diodo. Le capacità in
ingresso del MOS possono essere trascurate e di conseguenza 𝐶𝑑 vale:
𝐶𝑑 = 𝜖𝑆𝜖0𝑞𝑁𝐷
2𝑉𝑑𝐴
La componente di rumore associata al circuito di reset dà un contributo 𝑤𝑛𝑟𝑒𝑠 ∝
1
𝑉𝑑
Conclusioni
Dalla Figura 6.4 si vede che si ha una iniziale riduzione del rumore al crescere dalla
Vsub giustificato dal fatto che 𝑤𝑛𝑟𝑒𝑠 ∝
1
𝑉𝑑. Per Vsub maggiore di 10V il rumore inizia
a crescere in quanto la componente associata alla corrente inversa del diodo prevale e
vale 𝑤𝑛𝑑 ∝ 𝑉𝑑 .

Capitolo 6 – Misure di caratterizzazione del chip
78
6.3 Misure di calibrazione
Scopo di questa misura è di calibrare il rivelatore. Si vuole capire a quanta
carica (misurata in elettroni) corrisponda ogni ADCcnt.
Per capirlo occorre iniettare nel rivelatore una carica nota; nel nostro caso verrà usata
una sorgente radioattiva (55
Fe). Il 55
Fe nel suo processo di decadimento emette raggi
X a due picchi di energie caratteristiche: 5.90 keV (più intenso) e 6.49 keV (meno
intenso). Il primo picco di ampiezza elevata ha un’energia di 5.90 keV mentre il
secondo picco di ampiezza minore ha un’energia di 6.49 keV.
I fotoni incidenti sul chip generano per effetto fotoelettrico fotoelettroni i quali
ionizzano generando un certo numero di coppie elettrone lacuna.
Considerando il picco del Ferro a 5.9 keV e sapendo che per generare una coppia
elettrone lacuna nel silicio è necessaria un’energia di 3.6 eV, si genera una carica
pari a:
5.9 𝑘𝑒𝑉
3.6 𝑒𝑉= 1640 𝑒−
Possiamo vedere in Figura 6.6 lo spettro ideale. Idealmente ci aspettiamo di ottenere
una figura simile anche con il nostro rivelatore SOI Imager. La sorgente in linea
teorica presenta due X e la larghezza dei picchi corrispondenti dovrebbe tendere a
zero. In un rivelatore reale il picco si allarga come conseguenza della somma di due
effetti:
La generazione di coppie elettrone lacuna è un effetto statistico e introduce
un errore dato da:
𝜎𝑁𝐶2 = 𝐹 ∙
𝐸𝑝
𝐸𝑐
Dove:
F = Fattore di Fano = 0.12
Εph = energia del fotone incidente (5.9 keV)
Ec = energia per creare una coppia elettrone lacuna (3.6 eV)
Rumore elettronico: 𝜎𝑁𝑒𝑙𝑒𝑡𝑡𝑟2
Il rumore totale è dato dalla somma quadratica dei due: 𝜎𝑁𝑚𝑖𝑠2 = 𝜎𝑁𝑒𝑙𝑒𝑡𝑡𝑟
2 + 𝜎𝑁𝑐2
Un picco stretto rappresenta una misura con un livello di rumore molto basso.
Figura 6.6: Spettro del Ferro 55

6.3 Misure di calibrazione
79
Passi per la calibrazione:
Si fa una misura dei piedistalli senza sorgente in modo da avere una misura di
buio e la relativa misura di rumore associata.
Si pone la sorgente radioattiva sopra il chip in modo che venga illuminato in modo uniforme durante tutta la misura ottenendo dei picchi che avranno una
posizione casuale da un’acquisizione all’altra. Si può vedere un esempio di
acquisizione in Figura 6.7
Con il DAQ si avrà una lettura in ADCcnts che è collegata al numero di coppie
elettrone lacuna generate in quanto l’energia del picco del Ferro è sempre costante.
Le misure sono state effettuate con una Ibias=200 µA (che garantisce un minor rumore
del chip) e per tensioni di svuotamento del substrato variabili da 0 V a 20 V.
Figura 6.7: Frame di un’area di (40x40) pixel di cui uno è stato illuminato da un
fotone
A titolo di esempio, le Figure 6.8 e 6.9 mostrano gli spettri ottenuti per Vd=10 V e
Vd=7 V rispettivamente.

Capitolo 6 – Misure di caratterizzazione del chip
80
Misura 1
Temperatura = 25 °C
Ibias = 200 µA
Vd = 10 V
Noise@10V = 3.94 ADCcnts
Numero acquisizioni = 1000
Si ottiene l’istogramma di Figura 6.8
Figura 6.8: Istogramma dello spettro ottenuto con
55Fe per Vd=10 V
Sull’asse X si ha il numero di ADCcnts mentre sull’asse Y è indicato il numero di
entries. Si può notare come questo spettro sia molto diverso da quello atteso dato che
non si vede il picco del ferro a 5.9 keV.

6.3 Misure di calibrazione
81
Misura 2
Temperatura = 25 °C
Ibias = 200 µA
Vb = 7 V
Noise@7V = 3.80 ADCcnts
Numero acquisizioni = 1000
Si ottiene l’istogramma di Figura 6.8
Figura 6.9: Istogramma dello spettro ottenuto con
55Fe per Vd=7 V
Lo spettro è molto simile a quello con Vd=10 V; sovrapponendoli si ha l’istogramma
di figura 6.10.

Capitolo 6 – Misure di caratterizzazione del chip
82
Figura 6.10: Istogramma degli spettri ottenuto con
55Fe per Vd=10 V e Vd=7 V
Il grafico rosso rappresenta lo spettro a Vd=7 V mentre quello verde rappresenta lo
spettro a Vd=10 V.
Il primo picco in corrispondenza a circa 30 ADCcnts è quello relativo al rumore. È
ovviamente presente in entrambe le misure e può essere tagliato imponendo di fare il
grafico dei soli segnali che superano una certa soglia.
Non si vede il picco del 55
Fe. Ci si aspetterebbe che il picco del rumore scendesse per
poi risalire con un secondo picco corrispondente ai 5.9 keV. Invece si ha un numero
quasi costante di entries da 60 a 130 ADCcnts. Questo significa che i 1640 e-
generati da ogni fotone incidente non sono tutti raccolti dal diodo. Una parte viene
persa e di conseguenza si ha in uscita un segnale di ampiezza minore.
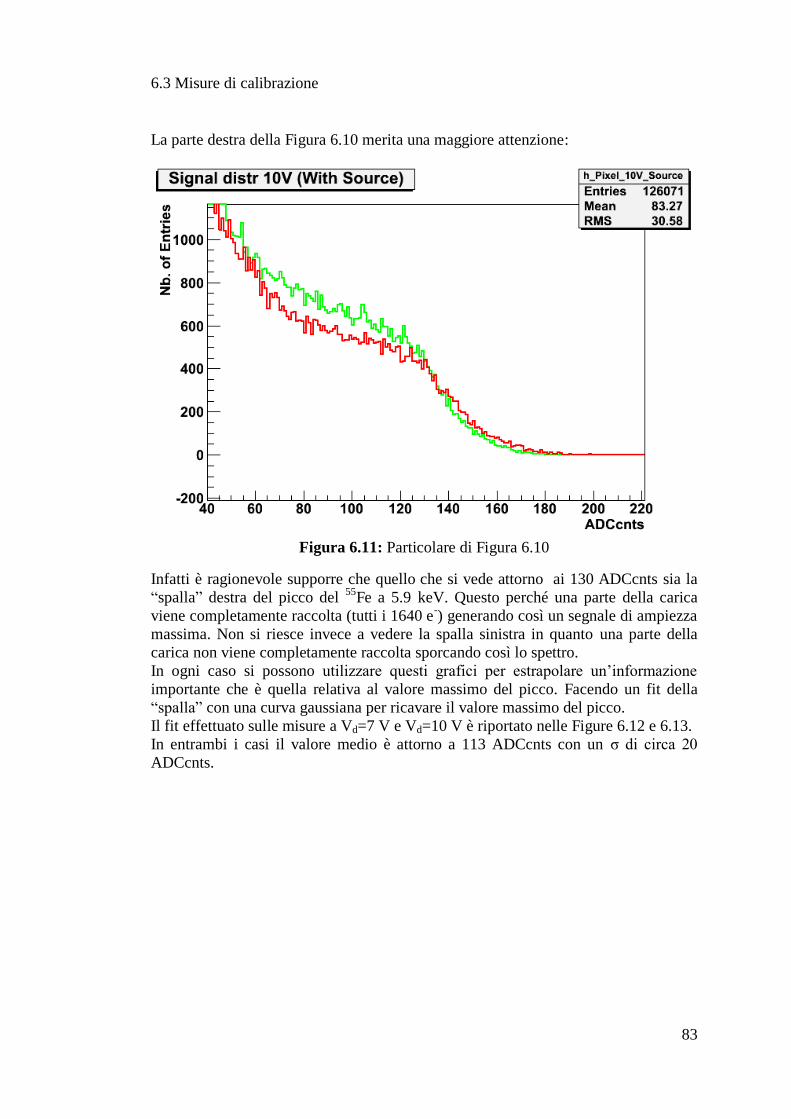
6.3 Misure di calibrazione
83
La parte destra della Figura 6.10 merita una maggiore attenzione:
Figura 6.11: Particolare di Figura 6.10
Infatti è ragionevole supporre che quello che si vede attorno ai 130 ADCcnts sia la
“spalla” destra del picco del 55
Fe a 5.9 keV. Questo perché una parte della carica
viene completamente raccolta (tutti i 1640 e-) generando così un segnale di ampiezza
massima. Non si riesce invece a vedere la spalla sinistra in quanto una parte della
carica non viene completamente raccolta sporcando così lo spettro.
In ogni caso si possono utilizzare questi grafici per estrapolare un’informazione
importante che è quella relativa al valore massimo del picco. Facendo un fit della
“spalla” con una curva gaussiana per ricavare il valore massimo del picco.
Il fit effettuato sulle misure a Vd=7 V e Vd=10 V è riportato nelle Figure 6.12 e 6.13.
In entrambi i casi il valore medio è attorno a 113 ADCcnts con un ζ di circa 20
ADCcnts.
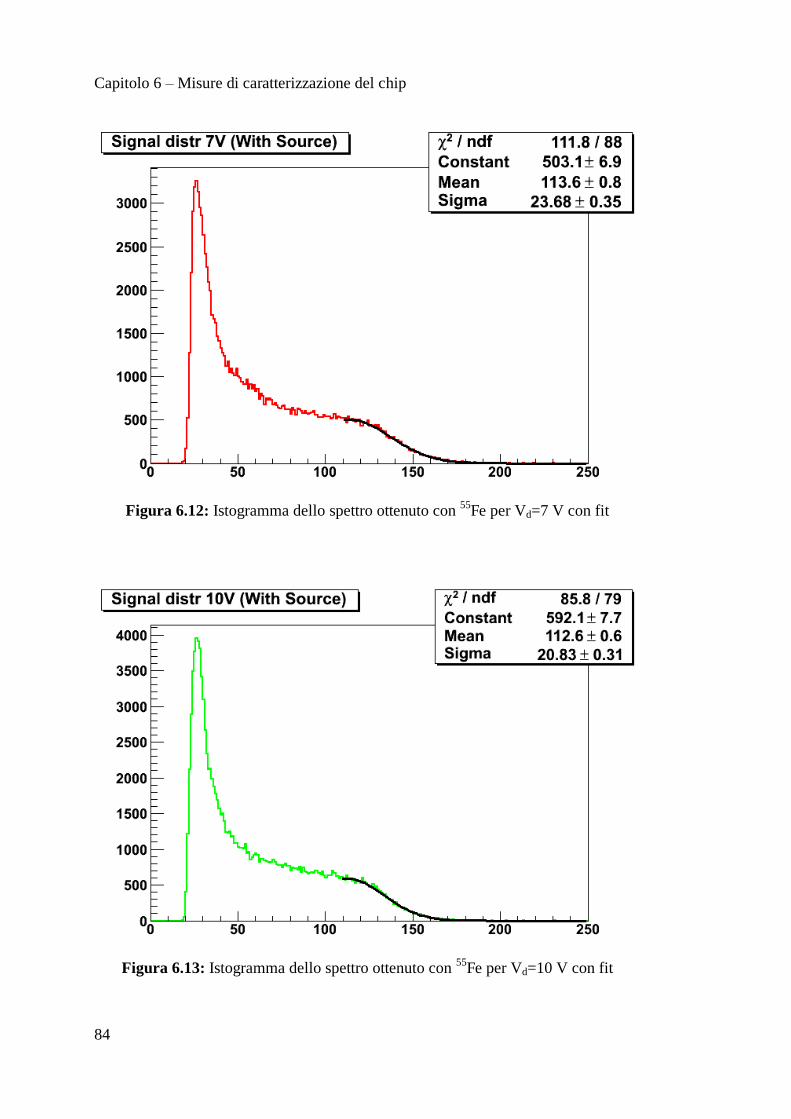
Capitolo 6 – Misure di caratterizzazione del chip
84
Figura 6.12: Istogramma dello spettro ottenuto con
55Fe per Vd=7 V con fit
Figura 6.13: Istogramma dello spettro ottenuto con
55Fe per Vd=10 V con fit

6.3 Misure di calibrazione
85
Riassumendo i dati ottenuti da questi due grafici sono:
Mean Sigma
Vd=7 V 113.6 23.68
Vd=10 V 112.6 20.83
Avendo trovato il valore del picco, si può ricavare la relazione che permette di
passare da un qualunque segnale espresso in ADCcnts allo stesso segnale espresso in
carica (e-).
𝟏𝟔𝟒𝟎[𝒆−]: 𝑴𝒆𝒂𝒏[𝑨𝑫𝑪𝒄𝒏𝒕𝒔] = 𝑺𝒆𝒈𝒏𝒂𝒍𝒆 𝒆− : 𝑺𝒆𝒈𝒏𝒂𝒍𝒆 [𝑨𝑫𝑪𝒄𝒏𝒕𝒔]
È ora esprimere il rumore del rivelatore in termini di elettroni invece che in termini
di ADCcnts.
La calibrazione con il 55
Fe permette di scrivere la seguente relazione:
1640𝑒−: 𝑀𝑒𝑎𝑛𝑉𝑑 [𝐴𝐷𝐶𝑐𝑛𝑡𝑠] = 𝑁𝑜𝑖𝑠𝑒 𝑒− : 𝑁𝑜𝑖𝑠𝑒 [𝐴𝐷𝐶𝑐𝑛𝑡𝑠]
Per Vd=7 V, ad esempio, si può ricavare:
𝑁𝑜𝑖𝑠𝑒 𝑒− =1640 ∗ 𝑁𝑜𝑖𝑠𝑒[𝐴𝐷𝐶𝑐𝑛𝑡𝑠]
112.6= 57 𝑒−
Ripetendo il calcolo per le diverse tensioni di svuotamento Vd si ottiene la Tabella
6.3:
200 µA
PARAMETRI FIT GAUSSIANO SPETTRI
Vd Noise
(CHIP) σN
picco 5.9keV
errore sul picco
Noise (CHIP) in e-
Errore in e-
3 4,48 128 50,68 57 22,7
5 3,75 116 27,6 53 12,6
7 3,94 113 23,6 57 11,9
10 3,80 112 20,7 56 10,2
15 4,17 112 21,5 61 11,7
20 4,33 102 23,7 70 16,1
Tabella 6.3: Noise ed errore in elettroni in funzione di Vd
Dai valori riportati in Tabella 6.3 si può notare come l’ampiezza (ζ) della gaussiana
non sia trascurabile e sia in realtà molto maggiore del noise atteso ζN.
Nel passaggio fra noise (espresso in ADCcnts) e noise (espresso in elettroni) occorre
quindi tenere presente questa incertezza nel fattore di conversione.
In Figura 6.14 è riportato il rumore del rivelatore, espresso in elettroni, in funzione
della tensione di svuotamento. Le barre di errore sono state calcolate considerando
l’incertezza sulla determinazione del picco di emissione del 55
Fe.

Capitolo 6 – Misure di caratterizzazione del chip
86
Figura 6.14: Noise del detector in elettroni in funzione di Vd
La calibrazione ha permesso di ricavare un rapporto di conversione di un segnale da
ADCcnts ad elettroni.
L’aver ricalcolato il noise in elettroni permette ora di ricavare il Rapporto Segnale
Rumore (SNR) nel caso più sfavorevole per un rivelatore di particelle; cioè il caso di
una MIP.
Una MIP attraversando il rivelatore genera 81 coppie elettrone-lacuna per ogni µm
attraversato.
Supponendo di lavorare con Vd=10 V, che corrisponde ad una zona svuotata pari a
W=20 µm e un noise di 56 elettroni, si ottiene:
𝑆𝑁𝑅 =20[𝜇𝑚] ∗ 81[𝑒−/𝜇𝑚]
56[𝑒−]= 29
che è un buon valore per il rapporto SNR.
Il problema che affligge questo dispositivo dopo le prime misure è il non
riuscire a convertire tutta la carica in segnale elettrico utile.
Per indagare meglio questo comportamento, le misure con tensioni di svuotamento
crescenti sono state ripetute e analizzate le differenze tra i vari risultati.
0
10
20
30
40
50
60
70
80
90
100
0 5 10 15 20 25 30
No
ise
(e
- )
Vd (V)
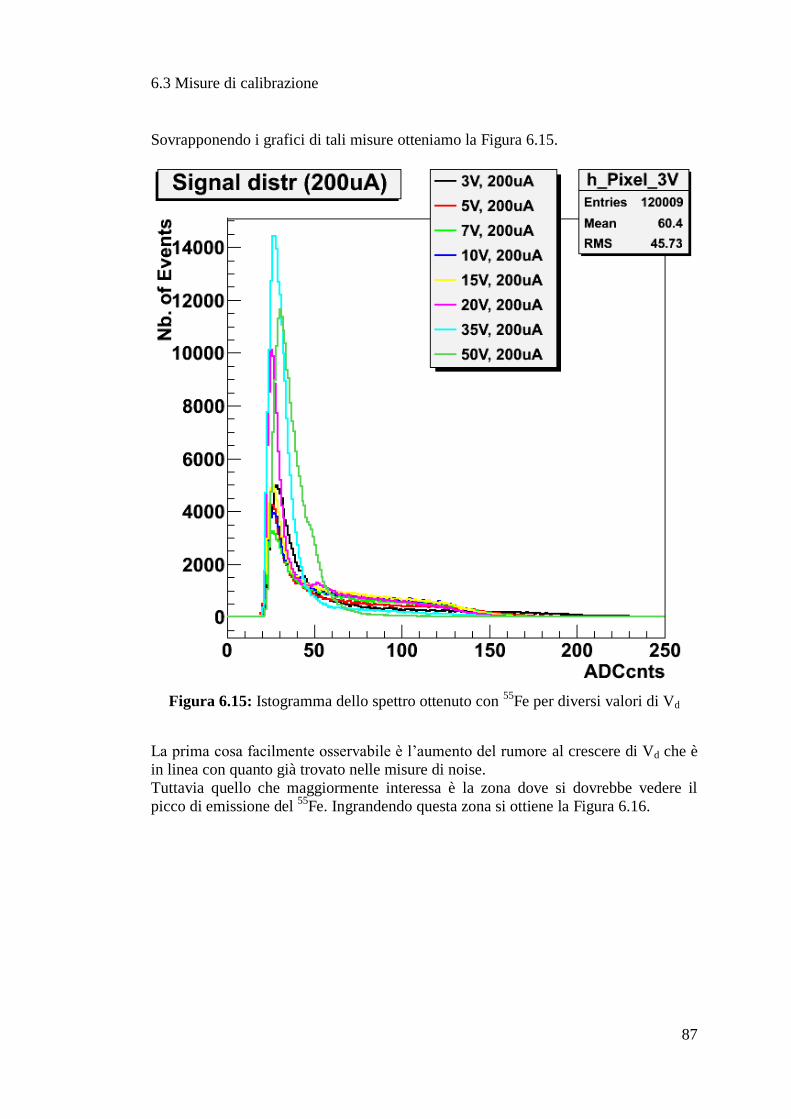
6.3 Misure di calibrazione
87
Sovrapponendo i grafici di tali misure otteniamo la Figura 6.15.
Figura 6.15: Istogramma dello spettro ottenuto con
55Fe per diversi valori di Vd
La prima cosa facilmente osservabile è l’aumento del rumore al crescere di Vd che è
in linea con quanto già trovato nelle misure di noise.
Tuttavia quello che maggiormente interessa è la zona dove si dovrebbe vedere il
picco di emissione del 55
Fe. Ingrandendo questa zona si ottiene la Figura 6.16.

Capitolo 6 – Misure di caratterizzazione del chip
88
Figura 6.16: Particolare di Figura 6.15
Si osserva che fino ad una tensione di svuotamento di circa 20 V tutti i grafici
presentano l’andamento mostrato prima; si riesce a distinguere la spalla destra del
picco ma non quella sinistra.
Per una tensione superiore a 20 V (curve azzurra e verde) non si riesce nemmeno a
distinguere la spalla destra; vi è una completa attenuazione del segnale. Questo fa sì
che, per tensioni superiori a 20 V, non sia possibile ottenere un rapporto di
conversione per calibrare il chip. Il grafico del noise espresso in elettroni infatti si
ferma necessariamente a 20 V.
Si distinguono quindi due zone di funzionamento:
Vd < 20 V: la carica non viene completamente raccolta dal diodo del pixel
Vd > 20 V: al problema della carica non completamente raccolta si aggiunge
un ulteriore problema di degradazione del segnale
Nei prossimi paragrafi verranno presentate ulteriori misure effettuate per investigare
questi due problemi che ci permettono di associare ad esse delle cause fisiche:

6.3 Misure di calibrazione
89
Non perfetta raccolta della carica l’anello di guardia attorno al pixel
cattura una parte della carica che non riesce così ad arrivare al diodo del
pixel stesso
Degradazione del segnale problemi di back-gate

Capitolo 6 – Misure di caratterizzazione del chip
90
6.4 Misure di Back-gate
Come è già stato spiegato, attorno ad ogni pixel è presente un matrice di tipo
p+ (Array) insieme ad una matrice (I/O) nell’elettronica esterna e ad un anello
(Outer) nella periferia nel rivelatore sempre di tipo p+.
Tutti e tre questi impianti servono a ridurre l’effetto di back-gate dei transistor MOS
presenti nello strato SOI.
Per cercare delle spiegazioni al problema esposto nel paragrafo precedente si è
cercato di capire se questi tre anelli di protezione funzionano come dovrebbero.
Innanzitutto analizziamo il loro principio di funzionamento.
6.4.1 Anelli di guardia: funzionamento
L’uso di strutture di guardia serve ad abbassare il potenziale alla superficie tra
substrato e ossido di silicio del BOX.
In assenza di queste strutture si ha un affollamento delle linee di campo in prossimità
del termine della giunzione: l’introduzione di strutture di guardia lasciate floating
riduce l’affollamento come si può osservare in Figura 6.17 Le strutture di guardia
sono realizzate tramite una regione che è isolata dalla giunzione principale e al
contempo sufficientemente vicine ad essa. Quando si applica una polarizzazione
inversa alla giunzione principale si stabilisce la condizione di punch-through e
l’impianto di guardia si auto polarizza ad una tensione intermedia rispetto alla
tensione della giunzione p-n. In queste condizioni la regione di carica spaziale si
estende della giunzione principale fino all’impianto di guardia, con il risultato che la
tensione è distribuita tra le due regioni in quanto si ottiene una curvatura delle linee
di campo elettrico attorno alla giunzione principale. Nel caso della matrice p+ posta
attorno ad ogni pixel, le simulazioni hanno mostrato come questo impianto si auto
polarizzi e limiti il potenziale nella superficie attorno al pixel stesso. [7]
Figura 6.17: Confronto delle linee di campo elettrico in una giunzione con e senza
strutture di guardia

6.4 Misure di back-gate
91
Prima di analizzare le misure che sono state fatte sull’SOI Imager per capire se il
fenomeno del back-gate sia effettivamente presente si analizza la Figura 6.18.
Essa rappresenta la curva Ids-Vd (con Vgs = 0 V) per un transistor fornito in una
struttura di test dalla OKI con tecnologia SOI a 200nm (la stessa dell’SOI Imager). Si
vede che il fenomeno del back-gate inizia ad essere presente per tensioni Vd ~ 15V. Il
transistor inizia a condurre anche senza applicare una tensione al terminale di gate. Si
può quindi capire come un chip costruito con questa tecnologia non possa funzionare
per tensioni di svuotamento superiori a 15 V a meno che non si implementino delle
soluzioni atte a ridurre questo effetto di innesco, non desiderato, dei transistor.
Figura 6.18: Ids in funzione di Vd con Vgs=0 V
Passando ora al problema del back-gate nel SOI Imager verranno analizzati uno alla
volta i tre impianti e poi si prenderà in considerazione il loro funzionamento nelle
condizioni di lavoro.
0,0E+00
5,0E-03
1,0E-02
1,5E-02
2,0E-02
0 5 10 15 20 25 30
I ds
(A)
Vd (V)
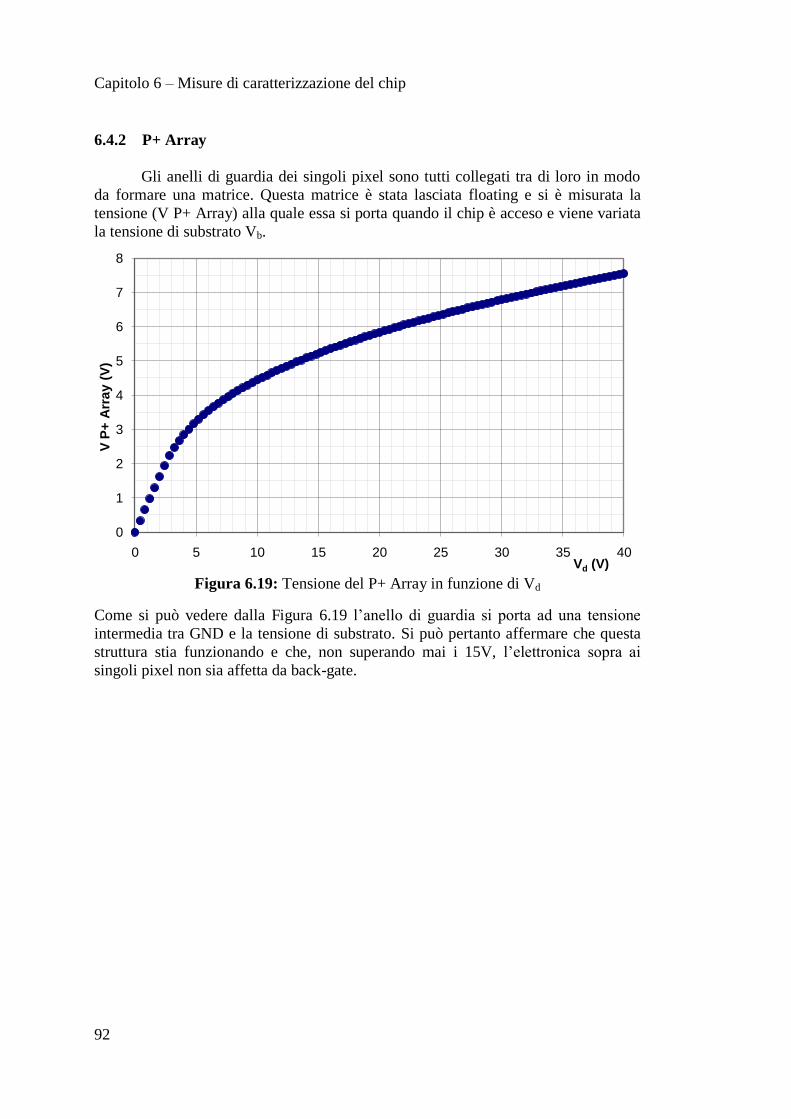
Capitolo 6 – Misure di caratterizzazione del chip
92
6.4.2 P+ Array
Gli anelli di guardia dei singoli pixel sono tutti collegati tra di loro in modo
da formare una matrice. Questa matrice è stata lasciata floating e si è misurata la
tensione (V P+ Array) alla quale essa si porta quando il chip è acceso e viene variata
la tensione di substrato Vb.
Figura 6.19: Tensione del P+ Array in funzione di Vd
Come si può vedere dalla Figura 6.19 l’anello di guardia si porta ad una tensione
intermedia tra GND e la tensione di substrato. Si può pertanto affermare che questa
struttura stia funzionando e che, non superando mai i 15V, l’elettronica sopra ai
singoli pixel non sia affetta da back-gate.
0
1
2
3
4
5
6
7
8
0 5 10 15 20 25 30 35 40
V P
+ A
rra
y (
V)
Vd (V)

6.4 Misure di back-gate
93
6.4.3 P+ I/O
Questa matrice di impianti P+ è posta all’esterno dell’area attiva del chip e
serve a proteggere l’elettronica di I/O. Anche in questo caso si è misurata la tensione
di questa struttura al variare della tensione di substrato ottenendo la Figura 6.20.
Figura 6.20: Tensione del P+ I/O in funzione di Vd
In questo caso la tensione cresce sempre al cresce della Vd presentando dei flessi per
Vd~15 V e Vd~20 V. La tensione non dovrebbe crescere in modo lineare ma saturare
come avviene nella matrice di guardia attorno ai pixel.
Già da questa misura si può capire come questa matrice di guardia esterna lasciata
floating non protegga in maniera opportuna l’elettronica di I/O.
Per verificarlo è stato collegato l’oscilloscopio all’uscita di un driver posto alla
periferia del chip che dovrebbe essere protetto da questo anello di guardia. Il
suddetto driver è accessibile mediante il piedino QRZ. Il segnale che arriva al driver
è l’uscita di un registro posto alla periferia dei pixel e protetto dalla P+ Array.
0
10
20
30
40
0 5 10 15 20 25 30 35 40
VP
+ I/O
(V
)
Vd (V)

Capitolo 6 – Misure di caratterizzazione del chip
94
Con il P+ I/O lasciato floating si ottengono i seguenti risultati (Figura 6.21):
Scala y = 1 V @ Vd=10 V Scala y = 1 V @ Vd=12V
Scala y = 200 mV @ Vd=14 V Scala y = 100 mV @ Vd=15V
Figura 6.21: Ampiezza dell’uscita QRZ a diverse tensioni di svuotamento Vd con P+
I/O floating
Si nota come con Vd = 15 V il segnale sia completamente degradato perchè almeno
una parte dell’elettronica di I/O non è più controllabile.

6.4 Misure di back-gate
95
Ripetendo le stesse misure con P+ I/O a GND si ottiene invece:
Scala y = 1 V @ Vd=10 V Scala y = 1 V @ Vd=20 V
Scala y = 1 V @ Vd=40 V Scala y = 1 V @ Vd=50 V
Scala y = 1 V @ Vd=70 V Scala y = 1 V @ Vd=80 V
Figura 6.22: Ampiezza dell’uscita QRZ a diverse tensioni di svuotamento Vd con P+
I/O collegato a GNd
In questo caso si vede come il registro continui a lavorare perfettamente anche con
una tensione Vd=80 V.

Capitolo 6 – Misure di caratterizzazione del chip
96
6.4.4 P+ Outer
Al contrario delle altre due questa protezione non è formata da una matrice
ma è un unico anello posto all’esterno di tutto il chip. Anche in questo caso è stato
lasciato floating e si è misurata la sua tensione rappresentata dal grafico di Figura
6.3.
Figura 6.23: Tensione del P+ Outer in funzione di Vd
Come per il il P+ I/O anche qui la tensione (V P+ Outer) sale in modo quasi lineare
con un flesso in corrispondenza di Vd~15 V.
Provando a collegare questo anello a GND come fatto per il P+ I/O, non si nota alcun
cambiamento nel funzionamento del rivelatore.
Collegando invece il P+ I/O a GND, il comportamento del P+ Outer varia e la
tensione alla quale si porta l’anello di guardia rimane più bassa come illustrato in
Figura 6.24
0
10
20
30
40
0 5 10 15 20 25 30 35 40
V P
+ O
ute
r (V
)
Vd(V)

6.4 Misure di back-gate
97
Figura 6.24: V P+ Outer con P+ I/O @GND
È lecito quindi pensare che i due anelli di guardia si influenzino a vicenda.
0
3
6
9
12
15
18
0 5 10 15 20 25 30 35 40
V P
+ O
ute
r (V
)
Vd (V)
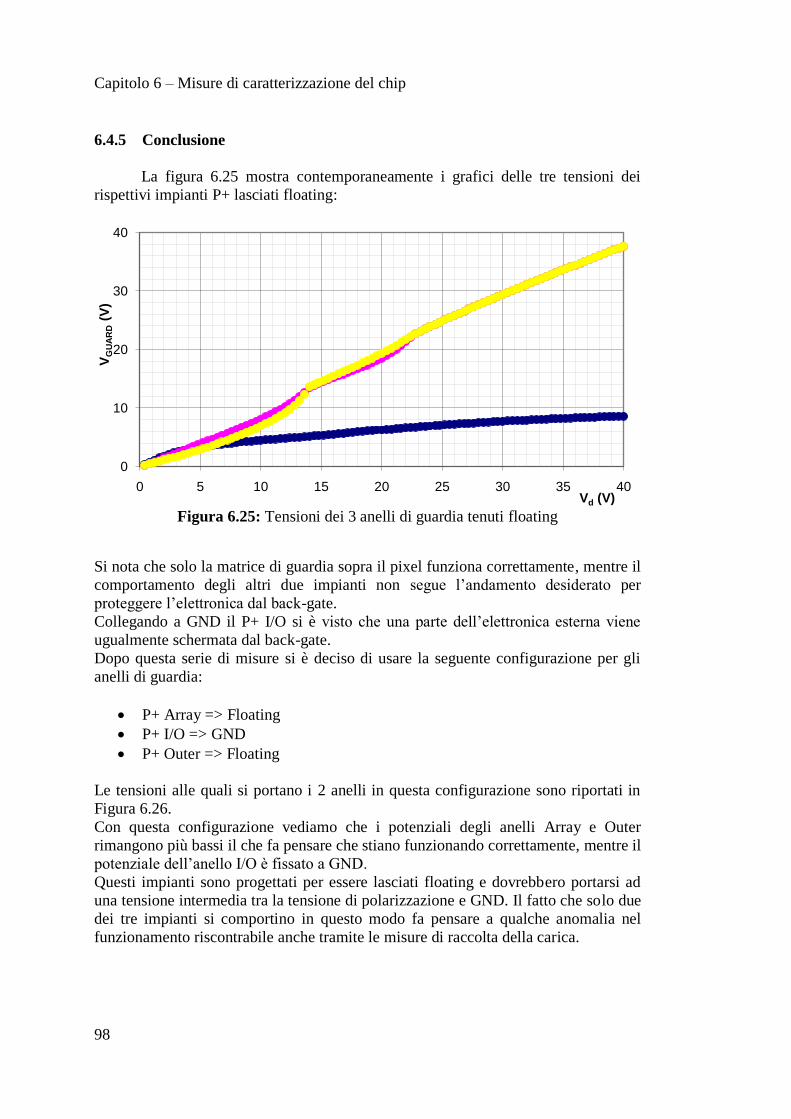
Capitolo 6 – Misure di caratterizzazione del chip
98
6.4.5 Conclusione
La figura 6.25 mostra contemporaneamente i grafici delle tre tensioni dei
rispettivi impianti P+ lasciati floating:
Figura 6.25: Tensioni dei 3 anelli di guardia tenuti floating
Si nota che solo la matrice di guardia sopra il pixel funziona correttamente, mentre il
comportamento degli altri due impianti non segue l’andamento desiderato per
proteggere l’elettronica dal back-gate.
Collegando a GND il P+ I/O si è visto che una parte dell’elettronica esterna viene
ugualmente schermata dal back-gate.
Dopo questa serie di misure si è deciso di usare la seguente configurazione per gli
anelli di guardia:
P+ Array => Floating
P+ I/O => GND
P+ Outer => Floating
Le tensioni alle quali si portano i 2 anelli in questa configurazione sono riportati in
Figura 6.26.
Con questa configurazione vediamo che i potenziali degli anelli Array e Outer
rimangono più bassi il che fa pensare che stiano funzionando correttamente, mentre il
potenziale dell’anello I/O è fissato a GND.
Questi impianti sono progettati per essere lasciati floating e dovrebbero portarsi ad
una tensione intermedia tra la tensione di polarizzazione e GND. Il fatto che solo due
dei tre impianti si comportino in questo modo fa pensare a qualche anomalia nel
funzionamento riscontrabile anche tramite le misure di raccolta della carica.
0
10
20
30
40
0 5 10 15 20 25 30 35 40
VG
UA
RD
(V)
Vd (V)
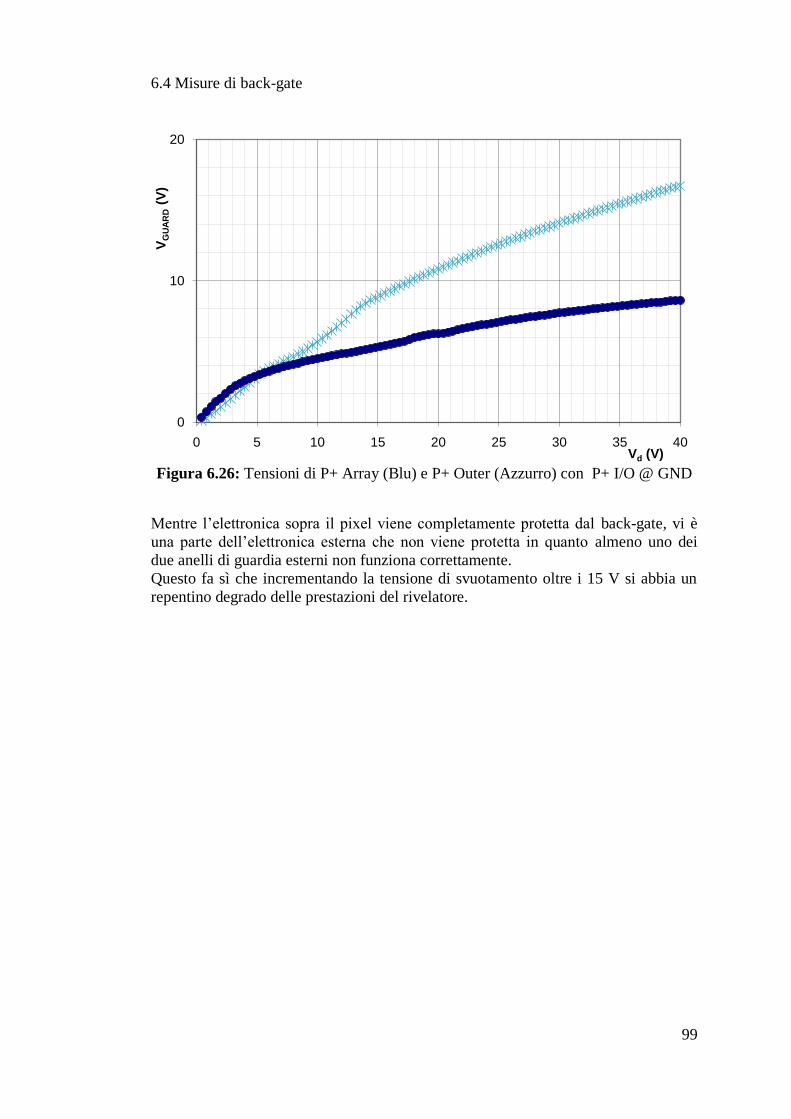
6.4 Misure di back-gate
99
Figura 6.26: Tensioni di P+ Array (Blu) e P+ Outer (Azzurro) con P+ I/O @ GND
Mentre l’elettronica sopra il pixel viene completamente protetta dal back-gate, vi è
una parte dell’elettronica esterna che non viene protetta in quanto almeno uno dei
due anelli di guardia esterni non funziona correttamente.
Questo fa sì che incrementando la tensione di svuotamento oltre i 15 V si abbia un
repentino degrado delle prestazioni del rivelatore.
0
10
20
0 5 10 15 20 25 30 35 40
VG
UA
RD
(V)
Vd (V)

Capitolo 6 – Misure di caratterizzazione del chip
100
6.5 Misure di raccolta carica
Si è appena visto come il back-gate causi problemi al funzionamento del
dispositivo per tensioni di svuotamento superiori a 15V. Si vuole ora cercare di
capire l’anomalia riscontrata nella raccolta della carica anche per tensioni minori di
15 V.
Innanzitutto si devono cercare le cause di questo problema.
Un primo fenomeno studiato è il clustering.
6.5.1 Clustering
Quando un fotone penetra nel substrato di silicio genera per effetto
fotoelettrico un fotoelettrone con la stessa energia; esso ionizza generando un
determinato numero di coppie elettrone lacuna.
Più precisamente il fotoelettrone genera una coppia elettrone lacuna ogni 3.6 eV; di
conseguenza come già calcolato precedentemente, i raggi X del 55
Fe a 5.9 keV
generano circa 1640 coppie elettrone lacuna.
La carica così generata è inizialmente molto localizzata ma può espandersi per
diffusione durante il tempo di deriva (alcuni ns) verso il diodo di raccolta.
Se la conversione avviene in profondità questa raccolta non è immediata e la nube di
carica ha la possibilità di espandersi anche di molto prima di raggiungere il diodo di
raccolta.
Si cerca ora di vedere se la carica generata da un fotone nel dispositivo possa
distribuirsi anche nei pixel adiacenti, dando origine a dei piccoli “cluster”.
La prima informazione necessaria è la lunghezza di assorbimento del fotone nel
silicio.
Un fotone da 5.9 keV ha una lunghezza d’onda di circa 0.2 nm.
Figura 6.27: Lunghezza di assorbimento dei fotoni nel silicio
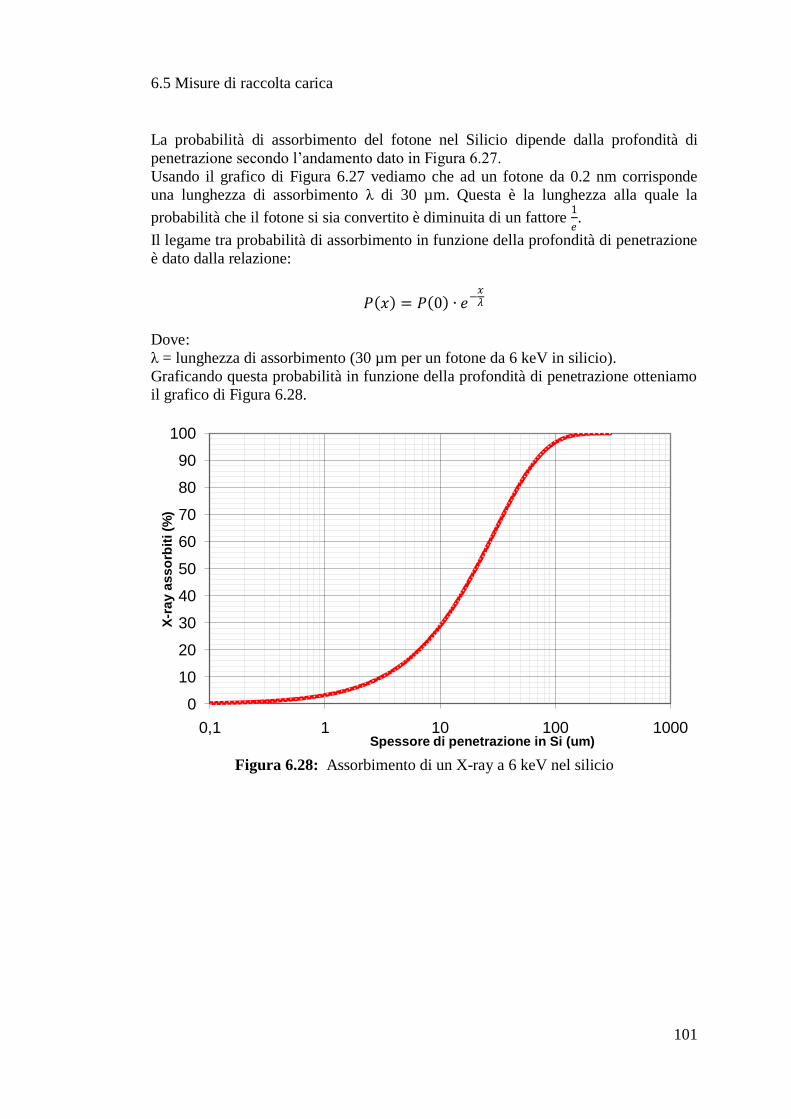
6.5 Misure di raccolta carica
101
La probabilità di assorbimento del fotone nel Silicio dipende dalla profondità di
penetrazione secondo l’andamento dato in Figura 6.27.
Usando il grafico di Figura 6.27 vediamo che ad un fotone da 0.2 nm corrisponde
una lunghezza di assorbimento λ di 30 µm. Questa è la lunghezza alla quale la
probabilità che il fotone si sia convertito è diminuita di un fattore 1
𝑒.
Il legame tra probabilità di assorbimento in funzione della profondità di penetrazione
è dato dalla relazione:
𝑃 𝑥 = 𝑃 0 ∙ 𝑒−𝑥𝜆
Dove:
λ = lunghezza di assorbimento (30 µm per un fotone da 6 keV in silicio).
Graficando questa probabilità in funzione della profondità di penetrazione otteniamo
il grafico di Figura 6.28.
Figura 6.28: Assorbimento di un X-ray a 6 keV nel silicio
0
10
20
30
40
50
60
70
80
90
100
0,1 1 10 100 1000
X-r
ay a
ss
orb
iti (%
)
Spessore di penetrazione in Si (um)

Capitolo 6 – Misure di caratterizzazione del chip
102
In questo modo, in base alla tensione di svuotamento che applicata, si può calcolare
la probabilità che un fotone venga convertito generando coppie elettrone lacuna.
Mediante il programma Casino [8], è stata simulata la traiettoria di elettroni da 6 keV
in silicio. Come si vede dalla Figura 6.29, il range massimo dell’elettrone è Re ~ 400
nm. Quindi la “nube” di carica iniziale può essere assunta di forma sferica, con
diametro uguale a Re.
Figura 6.29: Nube iniziale di carica
Questa nube non viene raccolta in modo istantaneo dal diodo di raccolta, ma impiega
un certo tempo t per raggiungere il diodo stesso:
𝑡 =𝜖
𝜇𝑞𝑁𝐴ln
𝑑𝑓
𝑑𝑓 − 𝑧
Dove:
ε = valore permettività silicio
µ = mobilità elettrone
NA = doping del substrato
z = profondità di conversione del fotone
df = profondità di svuotamento
q = carica elettrone

6.5 Misure di raccolta carica
103
Facendo un grafico do questo tempo in funzione della profondità z di conversione del
fotone si ottiene la Figura 6.30
Figura 6.30: Tempo di raccolta della nube di carica. In rosso il tempo per le lacune
mentre in blu in tempo per gli elettroni
Durante questo tempo la nube si espande per diffusione secondo la relazione:
𝑐𝑓 = 2 ∙ 𝜎 = 2 ∙ 2 ∙ 𝐷 ∙ 𝑡 = 8𝐷𝜖
𝜇𝑞𝑁𝐴
𝑑𝑓
𝑑𝑓 − 𝑧
1/2
Dove:
cf = diametro della nube
D = diffusività
0,E+00
1,E-09
2,E-09
3,E-09
4,E-09
5,E-09
6,E-09
7,E-09
8,E-09
0 5 10 15 20 25
co
lle
cti
on
tim
e (
s)
photon conversion depth (um)

Capitolo 6 – Misure di caratterizzazione del chip
104
La Figura 6.31 mostra l’andamento del diametro della nube in funzione della
profondità alla quale si genera la carica.
Figura 6.31: Diametro della nube di carica. In rosso il diametro per le lacune mentre
in blu il diametro per gli elettroni
Con una tensione di substrato di 15 V, alla quale corrisponde un’ampiezza della zona
svuotata di circa 23 µm, si ottiene una dimensione della nube di circa 8 µm.
Considerando che il pixel ha una dimensione di 13 µm è ragionevole attendersi dei
cluster durante l’esposizione del rivelatore alla sorgente di 55
Fe soprattutto se la nube
di carica non viene generata esattamente sotto al diodo di raccolta, ma nella periferia
del pixel stesso.
Dall’analisi dei dati sperimentali però non emerge alcun cluster.
In Figura 6.32 possiamo vedere la rappresentazione di un frame di un’acquisizione
fatta con la sorgente attiva. Sono presenti sei picchi corrispondenti a sei diversi pixel
illuminati. Oltre al pixel con il picco sono graficati anche gli otto pixel adiacenti. Le
ampiezze di questi picchi sono dovute unicamente al rumore del chip e non ad un
fenomeno di clustering. Ripetendo questo procedimento anche per altri frame non si
hanno risultati diversi.
0
1
2
3
4
5
6
7
8
9
0 5 10 15 20 25
Dia
me
tro
de
lla
nu
be
di c
ari
ca
(u
m)
photon conversion depth (um)

6.5 Misure di raccolta carica
105
Figura 6.32: Frame di un’acquisizione con sorgete di
55Fe attiva
Quello che si osserva invece è che l’ampiezza dei picchi è diversa. Mentre si
dovrebbero avere ampiezze costanti in quanto la carica raccolta dovrebbe essere
sempre la stessa.
Si può escludere la distribuzione della carica su più pixel adiacenti come causa
dell’assenza del picco nello spettro della sorgente; nel prossimo paragrafo verrò
considerata un’altra possibile spiegazione.

Capitolo 6 – Misure di caratterizzazione del chip
106
6.5.2 Raccolta della carica da parte dell’anello di guardia
Come visto precedentemente, l’anello di guardia posto attorno al pixel si
porta ad una tensione intermedia tra 0V e la tensione di polarizzazione del substatro
Vd. Ripetendo la misura di V P+ Array con la sorgente di 55
Fe su rivelatore (per
Vd=10V) si ottiene il risultato di Figura 6.33.
Figura 6.33: V P+ Array. In blu senza la sorgente. In rosso con la sorgente attiva
Possiamo vedere che il potenziale al quale si porta l’anello di guardia varia seppur di
poco se la sorgente è attiva. Questo ci fa pensare che anche se l’anello di guardia è
tenuto floating vi siano dei percorsi conduttivi che permettono il passaggio di
corrente in tutta la matrice dell’anello che si comporta come una resistenza
distribuita.
L’anello di guardia deve essere tenuto floating; di conseguenza non è possibile
effettuare una precisa misura di questa corrente.
In ogni caso questo risultato ci fa pensare che questo anello sottragga una parte della
carica che invece dovrebbe essere raccolta dal diodo.
4,83
4,835
4,84
4,845
4,85
4,855
4,86
4,865
4,87
4,875
4,88
9,9 9,95 10 10,05 10,1
VP
+ A
rra
y (
V)
Vd (V)
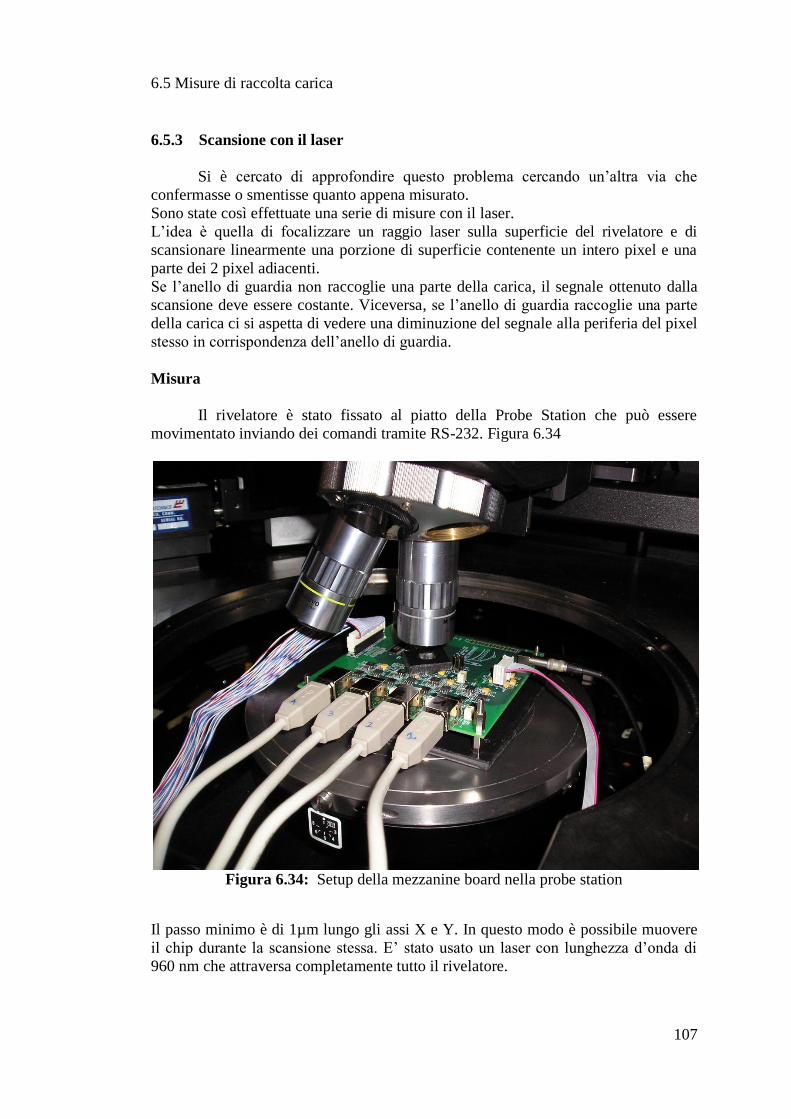
6.5 Misure di raccolta carica
107
6.5.3 Scansione con il laser
Si è cercato di approfondire questo problema cercando un’altra via che
confermasse o smentisse quanto appena misurato.
Sono state così effettuate una serie di misure con il laser.
L’idea è quella di focalizzare un raggio laser sulla superficie del rivelatore e di
scansionare linearmente una porzione di superficie contenente un intero pixel e una
parte dei 2 pixel adiacenti.
Se l’anello di guardia non raccoglie una parte della carica, il segnale ottenuto dalla
scansione deve essere costante. Viceversa, se l’anello di guardia raccoglie una parte
della carica ci si aspetta di vedere una diminuzione del segnale alla periferia del pixel
stesso in corrispondenza dell’anello di guardia.
Misura
Il rivelatore è stato fissato al piatto della Probe Station che può essere
movimentato inviando dei comandi tramite RS-232. Figura 6.34
Figura 6.34: Setup della mezzanine board nella probe station
Il passo minimo è di 1µm lungo gli assi X e Y. In questo modo è possibile muovere
il chip durante la scansione stessa. E’ stato usato un laser con lunghezza d’onda di
960 nm che attraversa completamente tutto il rivelatore.

Capitolo 6 – Misure di caratterizzazione del chip
108
Per movimentare la probe station è stato realizzato un programma in Microsoft
Visual C++ [9]. Figura 6.35
Comandi di apertura e
chiusura interfaccia RS-232
Comandi di
movimentazione manuale
Comandi ausiliari di
interrogazione della probe
station
Comandi di
movimentazione
automatica
La misura è stata effettuata con
una tensione di svuotamento Vd=10V.
Inizialmente si è posizionato il laser manualmente al centro di un pixel e lo si è poi
spostato lungo l’asse x di -10 µm.
È stato lanciato un ciclo di 20 misure con 100 acquisizioni ogni misura Tra una
misura e l’altra il piatto della probe veniva spostato di +1 µm lungo l’asse X.
Essendo un pixel largo 13 µm, c’è la certezza di eseguire una scansione sopra un
pixel completo e parzialmente sopra i due pixel adiacenti.
Figura 6.35: Programma di movimentazione
della probe station

6.5 Misure di raccolta carica
109
Figura 6.36: Risultato della scansione con il laser di 3 pixel adiacenti
Il risultato (Figura 6.36) è graficamente simile a quello che ci si aspettava ma la
causa che genera un andamento non uniforme nella raccolta della carica è un’altra.
Come si può vedere in Figura 5.6, infatti attorno ad ogni pixel è presente una matrice
di metallizzazioni che sfortunatamente non lasciano passare il raggio laser.
L’illuminazione “da davanti”, quindi, non può dare nessuna indicazione.
Sfortunatamente nel nostro caso non è nemmeno possibile un’illuminazione “da
dietro”, perché il back side è completamente metallizzato. Questa misura non ha così
portato ai risultati sperati. In ogni caso è stato creato da zero un setup che permette di
effettuare in modo efficace scansioni con il laser sia in modo manuale che
automatizzando un percorso da far seguire alla probe station.
Sarà interessante ripetere queste misure con un chip assottigliato (quindi con la
rimozione della metallizzazione del backside) che può essere illuminato da sotto. Si
potrà allora chiaramente capire se l’anello di guardia raccoglie una parte della carica
che dovrebbe altrimenti essere raccolta dal diodo principale.
Capitolo 6 – Misure di caratterizzazione del chip
110
6.6 Calcolo efficienza
Dopo aver eseguito una serie di misure che hanno permesso di calibrare il
rivelatore e di metterne in evidenza i limiti principali, si vuole ora stimare un altro
dato significativo: l’efficienza di rivelazione.
L’efficienza è intesa come rapporto fra il numero di fotoni rivelati dal sensore e il
numero di fotoni che si suppone convertano nel substrato. Quest’ultimo numero (la
frazione dei fotoni che convertono nel substrato) è stato calcolato considerando i
fattori qui sotto elencati:
Numero di fotoni emessi dalla sorgente (Nsource): nota l’attività nominale del
55Fe al momento dell’acquisto (185 MBq, cui corrispondono 3.5·10
6
fotoni/s per steradiante [10]), possiamo calcolare il numero di fotoni emessi
su tutto l’angolo solido ( 4.4·107 fotoni/s).
Noto il tempo di dimezzamento, si può calcolare l’intensità di emissione
attuale (Nsource 3.73·107 fotoni/s).
Numero di fotoni sul rivelatore (Ndet): di tutti i fotoni emessi dalla sorgente, solo una parte di essi raggiungerà il rivelatore. La frazione attesa sul sensore
viene calcolata considerando l’angolo solido (sorgente posizionata a 3 cm
dal rivelatore, di area attiva 3.2 mm 3.2 mm): Ndet 10-3
·Nsource 4·104
fotoni/s).
Numero di fotoni nel substrato (Nsub): sopra al substrato sono presenti in
successione i seguenti strati: 1µm di Al, 5µm di SiO2, 40 nm di Si, e 200 nm di SiO2. Vi è una certe probabilità che i fotoni convertano anche
all’interno di queste zone e ovviamente non vengano rivelati dal chip.
Conoscendo i coefficienti di assorbimento dei fotoni da 5.9 keV nei vari
materiali (Al, SiO2, Si), è stato stimato che il numero di fotoni che riescono a
raggiungere il substrato è Nsub 3.5·104 fotoni/s.
Numero di fotoni che convertono nel substrato (Nconv): in base alla tensione di svuotamento applicata al rivelatore, avrò una variazione del
volume utile per la conversione (assumendo, per semplicità, che la carica
generata dai fotoni che convertono nella zona non svuotata non venga
raccolta). I fotoni al secondo che convertono nel substrato (Nconv) variano
quindi in funzione della tensione di substrato applicanta, come riportato nella
Tabella 6.4:
Vd (V) 4 7 10 15 18
Nconv (fotoni/s) 8.4·103 1.1·10
4 1.3·10
4 1.6·10
4 1.8·10
4
Tabella 6.4

6.6 Calcolo efficienza
111
Numero di fotoni attesi su N frame (Nframe): durante l’irraggiamento, il chip
non è sempre “attivo” (non tutte le letture del chip, cioè, sono effettivamente
salvate dal sistema di acquisizione). Il tempo di “attività” del chip dipende dal
tempo di lettura di ogni frame (che a sua volta dipende ovviamente dalla
frequenza di lavoro) e dal numero di frame che si sono acquisiti. Vale cioè la
seguente relazione:
Nframe = Nconv (# di frame acquisiti) (tempo medio in cui è attivo un frame).
Questo è proprio il numero di eventi che ci si aspetterebbe di rivelare con un
rivelatore ideale con efficienza pari al 100%.
Per ciascuna delle tensioni di svuotamento riportate in Tabella 6.4 sono state effettuate misure con la sorgente di
55Fe. Per ogni misura, il numero di eventi
conteggiati include quelli dovuti al rumore, che non vogliamo considerare.
Per cercare di eliminare la componente di eventi conteggiati dovuti al rumore,
sono stati fatti vari tagli, variando il rapporto S/N. Il taglio che permette di
eliminare in modo più efficiente gli eventi dovuti al rumore, senza scartare
troppi segnali utili, è per S/N=7 come si può dedurre da Figura 6.37 presa con
Vd=10V.

Capitolo 6 – Misure di caratterizzazione del chip
112
Spettro con S/N=4 Spettro con S/N=6
Spettro con S/N=7 Spettro con S/N=8
Figura 6.37: Spettri ottenuti a diversi valori di S/N

6.6 Calcolo efficienza
113
Si ha la massima efficienza con una tensione di svuotamento Vd=7 V, essa rimane
pressoché quasi costante fino a 10 V. A 15 V, come atteso, a causa del back-gate si
ha una drastica riduzione dell’efficienza. La Figura 6.38 dal l’efficienza in funzione
della tensione di svuotamento.
Figura 6.38: Efficienza del rivelatore in funzione della Vd
È utile riportare in un grafico il numero di fotoni attesi e il numero di fotoni rivelati
in funzione della tensione di svuotamento. Figura 6.39
Si vede chiaramente che il numero di fotoni rivelati aumenta con la tensione di
svuotamento (in quanto aumenta il volume utile per la conversione) anche se rimane
minore del numero di fotoni che ci si aspetta. Questo è dovuto al fatto che
l’efficienza non è del 100% e che una parte della carica non viene raccolta dal diodo
ma dall’impianto di guardia.
Quando la tensione di svuotamento supera i 10V il numero di fotoni rivelati inizia a
scendere a causa dell’innescarsi del problema del back-gate.
Ancora una volta è possibile così vedere l’effetto combinato dei due problemi che
affliggono questo dispositivo (non perfetta efficienza nella raccolta della carica ed
effetto di back-gate). Il primo si manifesta per qualsiasi tensione di svuotamento
mentre il secondo inizia a farsi sentire superata la soglia di Vd~10V.
0
10
20
30
40
50
60
70
80
90
100
0 5 10 15 20 25
Fo
ton
i ri
ve
lati
(%
)
Vd (V)

Capitolo 6 – Misure di caratterizzazione del chip
114
Figura 6.39: Numero di fotoni rivelati e numero di fotoni attesi in funzione della Vd
0
2000
4000
6000
8000
10000
12000
14000
0 2 4 6 8 10 12 14 16 18 20
Nu
me
ro d
i fo
ton
i
Vd (V)Detected photons
Expected photons

115
7 Conclusioni
Questo lavoro studia un nuovo tipo di rivelatore basato su tecnologia SOI, il SOI
Imager.
Sono state eseguite una serie di misure (elettriche, di noise e di calibrazione) che
hanno permesso di caratterizzarne il funzionamento mostrando interessanti proprietà
come ad esempio l’alto SNR.
Con queste misure sono anche emersi i due principali limiti di questo dispositivo:
discreta efficienza di raccolta della carica dovuta agli impianti di guardia che raccolgono una parte di questa carica non arrivando così al diodo principale.
problema del back-gate per tensioni di svuotamento maggiori di 15V. I risultati che ottenuti sono serviti per la sottomissione di un nuovo chip,
SOSOIMAGER (Son Of SOI Imager) fatta a gennaio 2010 e mostrato in Figura 7.1
Figura 7.1: Layout del chip SOSOIMAGER
Questo nuovo chip avrà solo funzioni di ivelatore di test progettato per cercare una
soluzione ai limiti riscontrati con l’Imager. È infatti suddiviso in otto diverse parti;
ognuna di queste parti ha un diverso disegno per il pixel come si vede in Figura 7.2

Capitolo 7 – Conclusioni
116
Figura 7.2: Otto tipi di pixel implementati nel nuovo chip
Verrà introdotta la tecnologia del p-spray (area azzurra di Figura 7.2) utilizzata in 5
diversi pixel con altrettante diverse configurazioni.
La tecnologia p-spray è un’alternativa agli impianti di guardia di tipo p+. Il p-spray
consiste in un impianto di tipo p uniforme alla superficie del silicio.
Escludendo il primo disegno (cerchiato in rosso) che è identico all’Imager sarà
interessante osservare come si comportano i pixel 5 e 6 (cerchiati rispettivamente in
giallo e arancione).
Il primo è progettato senza alcuna protezione per il back-gate il che ne limiterà l’uso
fino a tensioni di circa 15V. Fino a questa tensione di svuotamento ci si aspetta però
di avere un’alta efficienza di raccolta non essendoci più l’anello di guardia che
raccoglie una parte della carica.
La tipologia 6 invece sarà interessante da analizzare in quanto sostituisce l’anello di
guardia con l’impianto p-spray. Solo le misure potranno dire se anche quest’ultimo fa
scendere l’efficienza del pixel oppure se rappresenta una valida alternativa
all’impianto di guardia utilizzato nell’Imager.
In ogni caso anche le altre configurazioni saranno molto utili per provare nuovi tipo
di pixel (p-spray con p-guard, diodo di raccolta di dimensioni maggiori) in modo da
poter determinare quale sia la più efficiente per la sottomissione di un futuro
rivelatore basato su tecnologia SOI.

117
8 Appendici
Appendice 1
Capitolo 8 - Appendici
118
Appendice 2

119
9 Bibliografia
[1] “ALICE Experiment at the CERN LHC”, Alice Technical Paper 1, 14
febbraio 2008
[2] “Dispositivi per la microelettronica”, Giovanni Ghione, 1998 McGraw-Hill
[3] “Analytic modeling of charge diffusion in charge-coupled-device imagers”,
Gordon R. Hopkinson, Optical Engineering 26(8), Pages. 766-772
[4] “A Sensor with Analog and Digital Pixels in 0.15 µm SOI Tecnology”, M.
Battaglia, D. Bisello, D. Contarato, P. Denes, P. Giubilato, L. Glesener, S.
Mattiazzo, C. Vu, Nuclear Instruments and Methods in Physics Research
Section A: Volume 583, Issues 2-3, 21 December 2007, Pages. 526-528
[5] “ Monolithic pixel sensors in deep-submicron SOI Technology”
M. Battaglia, D. Bisello, D. Contarato, P.Denes, P. Giubilato, L. Glesener, S.
Mattiazzo, C. Vu, Presented at the Pixel 2008 Workshop, published in 2009
JINST 4 P04007; doi: 10.1088/1748-0221/4/04/P04007
[6] “A DAQ system for pixel detectors R&D”, M. Battaglia, D. Bisello, D.
Contarato, P. Giubilato, D. Pantano, T. Tanabe, M. Tessaro, Nuclear
Instruments and Methods in Physics Research Section A: Volume 611, Issue
1, 21 November 2009, Pages. 105-110
[7] “High voltage devices for silicon detector operation in future high energy
physics experiments”, Martina Da Rold, Phd. Thesis, Febbraio 1998
[8] “Casino: monte CAarlo SImulation of electroN trajectory in sOlids”,
http://www.gel.usherbrooke.ca/casino/index.html
[9] “Beginning Visual C++ 2008”, Ivor Horton, 2008 Wiley Publishing
[10] “Nuclited IEC1332”, datasheet


Ringraziamenti
La prima persona che devo ringraziare per la stesura di questo elaborato è
sicuramente la professoressa Francesca Soramel che già dall’esame di Fisica 2 del
primo anno ha iniziato ad attirare la mia attenzione verso il progetto ALICE. Si è poi
presa l’incarico di inserirmi nel gruppo di lavoro dove ho svolto questa tesi
all’Università di Padova.
Tutto questo gruppo che mi ha seguito e sopportato durante questi ultimi mesi
merita un ringraziamento particolare. Serena che più e più volte mi ha spiegato
fenomeni fisici a me sconosciuti e mi ha aiutato moltissimo in tutto il lavoro. Come
dimenticare poi i suoi suggerimenti, altrettanto importanti, con i regali che dovevo
fare.
Devis, che mi ha introdotto per la prima volta nel laboratorio e mi ha insegnato tutti i
vari metodi di misura che sono stati effettuati in questo lavoro.
Luca, per avermi prestato metà della sua scrivania e Mario per i preziosi consigli
tecnici.
Il professor Dario Bisello, responsabile del gruppo che ha sempre seguito il lavoro
indirizzandolo nel miglior modo possibile.
Un ringraziamento particolare va al professor Selmi che ha revisionato il lavoro e mi
ha dato interessanti spunti di approfondimento relativi agli anelli di guardia.
Senza tutte queste persone questo lavoro non sarebbe stato possibile.
I ringraziamenti sono adesso per quelle persone che hanno reso possibile il
raggiungimento di questo lungo percorso. I miei genitori che per ben sei anni mi
hanno mantenuto a Udine, in Olanda e in quest’ultimo periodo anche a Padova. Mi
hanno sempre sostenuto nei momenti difficili trovando sempre il modo per
spronarmi.
Stefania, conosciuta il giorno prima di iniziare la tesi. In poco tempo hai saputo
capirmi, sopportarmi e hai sempre trovato il modo per farmi sorridere ogni giorno
anche quando tutto sembrava andare storto.
Gli amici di sempre: Carlo, Luca e Marco per tutte le avventure passate con loro in
questi ultimi anni.
I coinquilini di Udine: Paolo, Stefano e Marco. Come dimenticare le ore trascorse
guardando serie tv e cartoni seduti nel divano e le mitiche cene che duravano fino a
notte fonda.
Tutti gli amici con i quali ho condiviso bellissimi momenti in questi anni.