Nonlinear transmission properties of hydrogenated amorphous silicon core optical fibers
Upload
independentCategory
view
6download
0
JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 13, NO. 2, APRIL 2004 355
BESOI-Based Integrated Optical SiliconAccelerometer
Jose A. Plaza, Andreu Llobera, Carlos Dominguez, Jaume Esteve, Iñigo Salinas, Jorge Garcia, and J. Berganzo
Abstract—The design, simulation, fabrication and characteri-zation of a new integrated optical accelerometer is presented inthis paper. The reduction of fabrication, packaging and thermo-mechanical stresses are considered by keeping the weak mechan-ical parts free of stresses. The mechanical sensor consists on a quadbeam structure with one single mass. In addition, there are twowaveguides on the frame of the chip self-aligned to one on the massof the accelerometer. Four lateral beams increase the mechanicalsensitivity and allow the flat displacement of the optical waveguideson the mass. The working principle is based on the variation ofthe output light intensity versus the acceleration due to the mis-alignment of the waveguides. The devices have been optimized bythe finite-element method to obtain a mechanical sensitivity of 1m g. The fabrication technology is based on BESOI wafers com-
bining bulk an surface micromachining. Moreover, machined glasswafers with cavities are bonded to the silicon wafer for packagingand damping control. Special packaging considerations as dicing,polishing and alignment are also presented. Optical measurementsat 633 nm shown an optical sensitivity of 2.3 dB/g for negative and1.7 dB/g for positive acceleration. This difference in the sensitivityhas been demonstrated as a consequence of the passivation layerlocated over the core of the waveguides. [1098]
Index Terms—Accelerometer, antiresonant reflecting opticalwaveguides (ARROW), microopticelectromechanical systems(MOEMS), silicon-on-insulator (SOI).
I. INTRODUCTION
ALTHOUGH the first silicon accelerometers were devel-oped during the 1970s, silicon accelerometers became a
large-scale product in the 1990s [1]. The technological improve-ments in bulk and surface micromachining made possible thecommercialization of these devices. On 2002, the world marketof accelerometers reached 90 millions of units and 430 million $[2]. Small size and weight, low-power consumption, low price,and high-volume production due to the batch mode of fabrica-tion are their main advantages. These features made them veryattractive for the automotive, military, and medical industry; inapplications such as airbags, navigation or human activity mon-itoring.
The accelerometers can be classified in two categories de-pending on their mechanical transfer function: stress sensing
Manuscript received July 2, 2003; revised November 15, 2003. Subject EditorN. de Rooij.
J. A. Plaza, A. Llobera, C. Dominguez, and J. Esteve are with the Centro Na-cional de Microelectrónica CSIC, Campus UAB 08193 Cerdanyola, Barcelona,Spain (e-mail: [email protected]).
I. Salinas is with the Grupo de Tecnologías de las Comunicaciones, Insti-tuto de Investigación en Ingeniería de Aragón I3A, Universidad de Zaragoza,Zaragoza, Spain.
J. Garcia and J. Berganzo are with the Ikerlan, Electronics and ComponentsDepartment, Mondragón, Gipuzkoa, Spain.
Digital Object Identifier 10.1109/JMEMS.2004.824884
and strain sensing accelerometers. Typical stress sensing ac-celerometers are piezoresistive; based on the piezoresistive ef-fect of the silicon [3]. In the other hand, capacitive accelerome-ters are an example of strain sensing accelerometers where thedistance of the electrodes of a capacitor changes as a functionof the acceleration [4]. These are two of the most used workingprinciples of the commercial microaccelerometers. However,these working principles have inherent drawbacks as temper-ature dependence, low sensitivity and high cross sensitivity toelectromagnetic interferences.
Conversely, the combination of micromachined silicon struc-tures and integrated optics provides with several outstandingproperties. First, its complete immunity of the integrated opticssystems to electromagnetic interferences (EMIs). This propertymakes them suitable, as opposite to its electrical counterparts,to be placed where strong electromagnetic fields are applied (ascould be electric power plants or power transformers). Second,the possibility of the remote sensing, that is, positioning the lightsource and the photodetector far from the measurement zone.This point is a major advantage when the device has to be in-serted in radioactive, harsh or explosive environments. Finally,but also related with the previous statement, is the impossibilityof shortcuts or spikes in integrated optics circuits, which wouldhave extremely dangerous effects on the previously mentionedenvironments.
Although there are stress sensing optical accelerometersbased on the photoelastic effect [5], most optical accelerometersare attractive examples of strain sensing accelerometers basedon coherence modulation [6] or light intensity modulation [7],[8]. Hanging optical fibers, acting as cantilevers, are simpleexamples of light intensity modulation accelerometers [9].There are more sophisticated samples using silicon cantileversas mechanical support of optical fibers [10].
Among the integrated optic accelerometers, the most widelyemployed waveguides are total internal reflection (TIR)-basedsilicon nitride waveguides due to its fabrication simplicity[11]. The high refractive index of the silicon nitride (2.01 @633 nm) causes a large beam broadening at the free-spacelight propagation regions (as could be the gap between twowaveguides). Therefore, the distance between waveguides hasto be very short to minimize the light divergence. Moreover,the high intrinsic residual stress of the liquid-plasma chem-ical vapor deposition (LPCVD) silicon nitride layers limitstheir thickness to few thousand of nanometers. Therefore,the insertion losses of the light injected by direct couplingfrom the input optical fiber (4 core) is huge due to thecross-section mismatch between the two structures. Anotherpossibility would be using a material with lower refractive
1057-7157/04$20.00 © 2004 IEEE

356 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 13, NO. 2, APRIL 2004
Fig. 1. a) Top view of the schematic and b) working principle of the optical accelerometer.
index (as could be plasma-enhanced chemical vapor deposition(PECVD) silicon oxide). Although with this low refractiveindex material it is possible to define thick layers, to preventlight absorption from the substrate, it is also required to usethick buffer layers, which provides to the structure with highmechanical stresses. In order to overcome the drawbacks of theTIR-based waveguides, recently there has been much intereston the antiresonant reflecting optical waveguides (ARROW)[12]. They basically consist on two layers, mainly of siliconnitride and silicon oxide, placed underneath the core. Knowingthe refractive indexes of both materials at the working wave-length, it is possible to define its thicknesses so as to behaveas a Fabry–Pérot tuned in antiresonance. Thus, in ARROWstructures light is confined at the upper interface by TIR, whileultrahigh ( 99.96%) reflection is achieved at the lower inter-face due to the antiresonant pair. As compared to the TIR-basedwaveguides, ARROW structures have several advantages, ascould be the possibility of defining polarization sensitive ornonsensitive waveguides, the low effect of the changes on thethicknesses and refractive indexes of the different layers on theoverall behavior of the waveguide and core sizes comparable tothese of the optical fiber, which minimizes the insertion lossesand makes the alignment easier.
One of the main potential problems of microsystems withweak mechanical parts is the residual stresses on the structures.The fixing of optical fibers or the integration of waveguides onthe low stiffness mechanical parts of the devices can introducestresses to the structure [13]. In addition, the different thermalexpansion coefficients of silicon and the layers that form thewaveguides can induce thermal stresses. In order to increase theimmunity to stresses from fabrication or packaging and due tothermal variations, we propose to avoid waveguides on the lowstiffness mechanical parts of the accelerometer that we present.
This paper examines our work on the design and fabricationof a new optical accelerometer. It is shown how waveguides areintegrated in the devices to have the input/output and sensingwaveguides self-aligned. The central theme is the reduction ofpotential stresses induced by the waveguides on the structure.The paper also shows the numerical simulations done to opti-mize the mechanical and optical performance of the devices.As a result, ARROW structures are used to reduce the beam di-vergence and to make the alignment easier. From the mechan-ical point of view, L-shaped lateral beams are implemented to
increase the mechanical sensitivity and permit the flat displace-ment of the mass. The packaging considerations as sawing, pol-ishing and alignment are also presented. Finally, the experi-mental characterization of the devices is discussed by compar-ison with the optical and mechanical simulations.
II. DESIGN AND SIMULATION
A. Accelerometer Design and Working Principle
The mechanical structure is a Quad Beam accelerometer [14].It consists of one central mass (inertial mass) and four externalbeams (springs) as shown in Fig. 1(a). The quad beam designshave lower mechanical sensitivity than the cantilever ones forsimilar dimensions. However, they have higher natural frequen-cies and, in addition, the mass displacement is equal in all thepoints of the mass for accelerations in the z direction due to thesymmetry of the structure. Thus, the mass moves vertically forperpendicular accelerations (z-direction). This displacement isthe same to the maximum displacement of the beams. Therefore,any structure on the mass (i.e., waveguides) has a displacementperpendicular to the device without any tilt for z-accelerations.
A waveguide is defined on the accelerometer’s mass assensing element. This waveguide is self aligned to an input andan output waveguide on the silicon frame of the chip, Fig. 1(a).
The working principle of the proposed design is based on thevariation of the light intensity at the output of the devices as afunction of the acceleration. It basically consists on a three-foldsegmented waveguide as illustrated in Fig. 1(b). The input andoutput segments are on the chip frame, and the sensing part is onthe seismic mass. An input optical fiber for light injection andan output optical fiber for readout are aligned to the input andoutput waveguides. When the accelerometer suffers from an ac-celeration in the z direction, a double misalignment is produced,one at each cut. Therefore, a modulation of the light intensityversus the acceleration occurs.
B. Design and Simulation of the Waveguides
An optical analysis of the accelerometer was done. Although-based ARROW structures had previously been
studied [15], [16], it was necessary to analyze the effects of themisalignment between the waveguide on the seismic mass andthe waveguides located at the frame. Beam divergence effectshave also been considered. Thus, by making the waveguides

PLAZA et al.: BESOI-BASED INTEGRATED OPTICAL SILICON ACCELEROMETER 357
Fig. 2. a) Simulated z-displacement of the accelerometer and b) a detail of the beam region for 1g z-acceleration. Simulated deformation of the accelerometerfor c) y-acceleration and d) x-acceleration. (The waveguides are not to scale).
wider at each cut, the divergence in the plane of the waveguideshas been compensated. Losses due to the divergence in thevertical direction (z) have been minimized by reducing as muchas possible the distance between the waveguides, since all thewaveguides of the accelerometer have the same height. Opticalsimulations of the device losses as a function of the seismicmass displacement were done by finite difference method(FDM) together with the beam propagation method (BPM).When all waveguides are aligned, the operation losses of thedevice, that is, the losses due only to the segmented waveguide,have a minimum value of 0.37 dB. In the real device, however,to this value it should be added the insertion and propagationlosses, together with the Fresnel reflection losses. This willcause an important increase of the losses of the device, whichcannot be associated to its principle of operation, and that willremain constant as a function of the applied acceleration. Whenthe seismic mass starts moving, the misalignment causes asharp increase of the operation losses that reaches 2.5 dB after 1
of vertical displacement. Insertion losses are intrinsic of thesetup and hence, its value is not affected by the displacement ofthe seismic mass. Finally, if the seismic mass is broken, that is,if there is no intermediate waveguide, operation losses increase12 dB. This fact can be used as a test system to determineif the inertial mass is broken. Once the working range wasestablished, the mechanical properties were chosen so as tofulfill the optical requirements.
C. Design and Simulation of the Mechanical Structure
The mechanical structures were simulated by the finiteelement method (FEM). ANSYS v.5.7 was used as commercial
software for the simulations. Structural simulations were doneto optimize the mechanical sensitivity of the devices. TheSOLID95 element was selected for the model. This elementis a high order element with 20 nodes having three degreesof freedom per node: translations in the nodal x, y, and zdirections. In addition, anisotropic materials could be modeledwith this type of element.
L-shaped external beams were implemented in order to in-crease the mechanical sensitivity without expending additionalchip area. The dimensions of the accelerometer were definedconsidering optical and technological features. The geometricalparameters of the structures were chosen to obtain a mechanicalsensitivity of 1 . This value was selected as a result of theprevious optical study and due to the in-house facilities for 1 gstatic acceleration measurements. Final dimensions of the iner-tial mass were 4000 width, 4000 long and 450 thickand the dimensions of the external beams were 166 width,1250 long and 15 thick. The simulations shown a ver-tical displacement of the mass for perpendicular accelerations tothe device, Fig. 2(a). The mass displacement and thus the mis-alignment between the waveguides is uniform and equal to themaximum displacement of the beams (1.05 ), Fig. 2(b).The cross-sensitivities were also simulated; Table I shows theseresults. The vertical misalignment between the waveguides onthe frame and on the mass is 0.202 for x-accelerations.Although the vertical misalignment is 0.105 for y-accel-erations the optical cross sensitivity is practically null becausethe waveguides are centred on the device, Fig. 2(c). Additionalmodal simulations were also done to estimate the natural fre-quency of the devices. The simulated frequency for the firstmodal mode was 489 Hz.

358 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 13, NO. 2, APRIL 2004
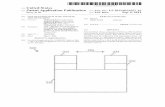
Fig. 3. Process fabrication of the optical accelerometer.
TABLE IMAXIMUM DISPLACEMENT OF THE MASS AND MISALIGNMENT BETWEEN
THE WAVEGUIDES ON THE FRAME AND ON THE MASS VERSUS THE
THREE DIRECTIONS OF THE ACCELERATION
III. TECHNOLOGY
The total fabrication process only needs five photolitho-graphic levels. Two levels are needed for the waveguidesdefinition, two for the mechanical structure definition andone for the control of the damping. The technology is basedon N-type, (100) oriented, 450- -thick bond and etch backsilicon-on-insulator (BESOI) wafers [17] from ShinEtsu. Thethickness of the buried silicon oxide layer is 2 and thethickness of the silicon layer is 15 . The fabrication processis split in three parts for better understanding. The first partdeals with the optic waveguides fabrication. The second part iscentred in the fabrication of the mechanical structures and thelast part is focused on packaging.
A. ARROW Waveguides Fabrication
The ARROW structures are fabricated using a combination ofsilicon oxides and silicon nitride layers. First, a 2- -thermaloxide is grown, Fig. 3(a). Second, a 380nm silicon nitride is deposited. Thesetwo layers form, on the frontside of the wafer, the Fabry–Pérottuned in antiresonance of the ARROW structure. Furthermore,the silicon nitride layer is also used as a mask material at thebackside of the wafer during the anisotropic etching.
The waveguide core is obtained by 4 plasma-en-hanced chemical vapor deposition (PECVD) silicon oxide
deposition on the frontside and by 3partial etching by Reactive Ion Etching (RIE), conferring
the ARROW structure a rib profile and assuring the lightcross-section confinement.
Finally, a 2- -PECVD silicon oxide is deposited as passi-vation layer with lower refractive index ,Fig. 3(b), so as to protect the device from dust or scratchesthat will cause an uncontrollable and undesired increase of thetotal losses. The second photolithographic step and etching pro-cesses are done to remove the highly-stressed layers that formthe ARROW structures where they are not required, that is toobtain a stress-free accelerometer. A 1- -aluminum layer isdeposited as a mask material to stand this long etching proce-dure.
B. Mechanical Structure Fabrication
Following, the wafers are micromachined for the mechan-ical structure fabrication. Firstly, the silicon nitride layer onthe backside of the wafer is patterned to open windows for theanisotropic etching, Fig. 3(c). In addition, a silicon oxide dryetching is done on the backside. Following, a photolithographicprocess(not shown in Fig. 3) is done on the frontside for the ac-celerometer release. A 6- -thick maP-245.5 photoresist fromMicro AllResist is used to cover the abrupt topography of thewafer. This process is done before the anisotropic etching inorder to avoid any photolithographic process in weak wafers.
Later, the wafer is etched in KOH, Fig. 3(d). The etching stopsin the buried oxide layer of the BESOI wafer. Although the etchrate of silicon oxide in KOH is much higher than in TMAH,the first one is used because the thickness of the buried oxide,2 , is enough to stop the etching for a long time. Moreover,KOH has advantages as larger ratio between the etch rates of theplanes {100} and {111} and therefore a better control of the di-mensions is possible. In addition, the lateral etching rate is lowerin KOH and so the dimensions of the structures for the convexcorner compensation are smaller. strips are used as convexcorner compensation structures [18]. Turns are used to controlthe etching front on the strips and to reduce the required space,Fig. 4. The implemented strips had a effective length of 1200
after considering the etching depth and etching conditions(etchant, concentration, temperature, ).

PLAZA et al.: BESOI-BASED INTEGRATED OPTICAL SILICON ACCELEROMETER 359
Fig. 4. a) h100i strips for convex corner compensation. b) and c) status of the strips during the etching. d) Schematic view and e) photographic detail of onecorner of the back of the devices after the anisotropic etching.
Fig. 5. Accelerometer release by RIE after a) standard light exposure time andb) overexposure time during the photolithographic process.
Afterwards, the silicon nitride and the silicon oxide fromthe backside of the wafer (used as a mask material during theanisotropic etching) are removed, Fig. 3(e). This etching pro-cedure allows the posterior anodic bonding to a machined glasswafer. At this point it is also etched the buried oxide used as KOHetch stop layer. Last, a frontside silicon dry etching release themechanicalstructure.Alightoverexposuretimeofthephotoresistwas necessary because the high height of the waveguides and theshort distance between the waveguides on the mass and on theframe induce shadow effects as shown in Fig. 5.
C. Packaging: Anodic Bonding, Dicing, Polishing, andMounting
As a first level of packaging, the processed silicon waferswere anodically bonded to a machined 1 mm-thick Pyrex #7740
Fig. 6. a) Photographic detail of the glass wafer with cavities and b)photograph of the fabricated accelerometer.
glass wafers, Fig. 3(f), to reduce the package stresses. The glasswafers were previously processed to define small cavities thatallow the mass vertical displacement, Fig. 6(a). The depth of thecavities on the glass defines the damping of the accelerometer.The presented accelerometers have a theoretical Q factor of 20for cavities of 80 depth. After sawing, the final dimensionsof the chips were 6.2 mm 6.2 mm. A photograph detail of thefabricated device is shown on Fig. 6(b).
Specialcarehas tobe takenduringdicingof thedevices.Ajetofwater is used as refrigeration system during sawing. This jet andthe vibrations during this process could break the accelerometers.In this sense, the rupture of the mechanical parts are prevented byfilling the cavities with photoresist during the sawing.
The light injection is done by end-fire coupling. This process,however effective, requires to have facet roughness below the

360 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 13, NO. 2, APRIL 2004
Fig. 7. a) Schematic of the dice polishing and b) photographic detail of thesilicon wafer after nonoptimized polishing speed. Small ruptures appears on thetop silicon layer of the BESOI wafers. (The top part of b) has been manipulatedby filling with white color for better viewing of the damages).
working wavelength. For this reason, the two faces of the dicewhere the waveguides ends, have to be mechanically polishedbefore the alignment. The polisher (LECO CORPORATIONUP-150) consists of a rotating abrasive disc; the dice are fixedand the disc is rubbed under the die’s surface to be polished,Fig. 7(a). The process starts with SiC disk of 0.9 grit size,afterwards 0.7 , 0.5 and 0.3 grit size are consec-utively used. The polishing is also a risky process that it canfracture the movable parts of the accelerometer. Therefore, thedice is filled with a combination of photoresist and wax duringthe polishing. The polishing speed were also optimized becausethe devices consist of two thick pieces of different materials (sil-icon and glass) and during the polishing process, the top siliconlayer of the BESOI piece can be severely damaged, as shownin Fig. 7(b). After the polishing the photoresist and wax weredissolved in warm acetone, 30 .
The optical fiber alignment is one of the main drawbacks ofthe MOEMS, specially if they are based on the light intensitymodulation. Concretely, in the accelerometer proposed in thispaper, if the optical fibers are not perfectly joined to the de-vices, it could be a uncertainty whether the measured losses aredue to the seismic mass displacement or to the misalignment be-tween the input–output optical fibers and the accelerometer. Abroaden solution to solve this problem is the placement of theoptical fibers in V-groove chips to make the alignment to thewaveguides easier and to avoid the fiber-waveguide misalign-ment during measurement. V-groove chips have been used inour devices. The bulk micromachining technique using KOHanisotropic etching in (100) silicon wafers has been used forV-groove fabrication. In addition, the silicon wafer with theV-grooves were anodically bonded to a 1 mm- thick glass wafer.Therefore, the final thickness difference between the V-grooveschips and the accelerometers (they have also a glass part) is 150
to facilitate the alignment. Moreover, the glass prevent theV-groove wafers from fracture due to their fragility. Finally, onesurface of the V-groove and the end of the fiber are polished to-gether so as to match the end of the V-groove with the end ofthe optical fiber.
In order to protect the devices during their manipulation andcharacterization, special aluminum pieces have been designed.First, the accelerometer was glued to a piece of aluminum, alittle bit shorter (6.0 mm) than the device to facilitate the pos-terior alignment to the V-groove chips, Fig. 8(a). Second, thedevice is covered with a special methacrylate piece to protect
it during handling, Fig. 8(b). Then, the input and output opticalfibers, both placed on V-groove chips, are aligned and gluedto the accelerometer, Fig. 8(c). A special glue (Norland Op-tical Adhesive (NOA) 61), nonabsorbent at the working wavele-length is used to minimize the losses. The glue was cure by ex-posure to UV light. Finally, two aluminum pieces were placedunder the grooves and all the system was glued to reduce thefragility, Fig. 8(d). The V-groove/accelerometer/V-groove setupis shown in Fig. 8(e) and a photograph of the whole system isshown in Fig. 8(f).
IV. CHARACTERISATION
A. Optical Characterization
It is known that ARROW structures are wavelength-selec-tive, that is, the Fabry–Pérot properties placed beneath thecore can be designed (in refractive index and thickness) so asto have minimum losses at the working wavelength. If therewere any variation on any of these parameters, minimumlosses will shift from the working wavelength. Referencewaveguides of different length were measured by end-firecoupling so as to determine the propagation and insertionlosses at and provided with results of 0.3 dB/cmand 2.5 dB respectively. Measurements have a minimumat the working wavelength, confirming that the waveguideconfiguration works in according to its specifications. It hasto be noted that the experimental value of the insertion lossesobtained in ARROWs are one order of magnitude smaller thanin silicon nitride waveguides, which have a value close to 20dB, confirming one of the previously mentioned reasons whyusing ARROW structures in the proposed accelerometer.
Once the optical properties of isolated waveguides were mea-sured and their behavior was in agreement with the requiredspecifications, the optical accelerometer was characterized. Thetotal losses of the optical, directly coupled to input and outputoptic fibers but without being glued to them, were 6.8 dB, Fig. 9.As it was previously mentioned, this value differs from the the-oretical losses (0.37 dB) since not only the operation losses arebeing measured, but there is also the contribution of the inser-tion, propagation and Fresnel reflection losses that causes thisincrease, and that have to be considered as an offset of the de-vice. In this configuration, both the input and output fiber opticswere able to move freely. Therefore, it was not possible to char-acterize the device versus the acceleration.
Afterwards, the accelerometers were stacked to V-grooveschips, as shown in Fig. 8(f), and the losses increased to 18.3 dB.This value is nearly 2 times higher as compared to the valuesobtained by simulations (9.5 dB), in which the total losses of asystem comprised by the accelerometer and the two V-groovechips, were considered. This factor can be understood if it istaken into account that light injection by end-fire coupling re-quires completely flat facets. Although it is relatively simple toobtain high-quality facets by silicon polishing, results are notso optimal when a silicon-glass substrate has to be polished.The difference on the hardness between both materials causesto have a tapered facets and defects on it, resulting in a hugeincrease of the insertion losses. In addition, there is a small mis-alignment during the curing of the epoxy for the gluing of the

PLAZA et al.: BESOI-BASED INTEGRATED OPTICAL SILICON ACCELEROMETER 361
Fig. 8. Setup for manipulation of the devices. a) The accelerometer is glued to a aluminum piece, b) a methacrylate piece protects the accelerometer, c) thev-groove chips with the input and output optical fibers are aligned and glued to the accelerometer, d) two aluminum pieces are placed under the v-groove chips toreduce the fragility of the system, e) schematic view of the v-groove/accelerometer/v-groove setup, and f) photograph of the whole system.
Fig. 9. Direct coupling of optical fibers to the waveguides on theaccelerometer.
V-grooves chips and the accelerometer. Nevertheless, power ob-tained at the output still allows an appropriate optical character-ization. Moreover, it has to be noted that once the whole set-uphas been glued, it provides with stable and reproducible mea-surements, although an improvement in polishing and gluinghas to be considered in future works.
B. Static Characterization
Accelerometer response as a function of the gravitationalfield was measured using a Ferris wheel. The wheel could be
rotated in such a way that the acceleration applied to the devicewas the projection of the gravity to the rotated angle. From theFEM simulations, it was expected a 1.05 vertical displace-ment for 1 g in the two directions. That mechanical sensitivityinduce a theoretical optical sensitivity of approximately 2.5dB/g.
The calibration curve is shown on Fig. 10(a). As expectedthere is an increase of the losses both for positive and negativeaccelerations, that is for positive and negative misalignments.It has to be noted that losses shown in this figure have beenre-ranged, being the zero fixed for the maximum power output.This has been done so as to determine the optical accelerom-eter sensitivity. Although, the value of the total loss is high, thesensitivity of the accelerometer is large enough for a good char-acterization with a measured repeatability of 6%. The value ofthe repeatability is due to the fiber optics bending during the ro-tation of the Ferris wheel. The measured optical sensitivity was2.3 dB/g for negative accelerations and 1.7 dB/g for positive ac-celeration. It can be observed how the output curve is not sym-metric. The first theoretical results, Fig. 10(a) in which the pas-sivation were not considered predicts a symmetric output curve.Then, the optical simulations were redone considering the pas-sivation layers over the waveguides. It can be observed how thenew model predicts the asymmetric trend on the curve. Thence,the asymmetrical response can be understood if it is taken intoaccount that waveguides have a passivation layer: when a givenacceleration is applied, there exist a seismic mass displacementand a misalignment between the waveguides, which causes alight coupling either at the Fabry-Perot or at the passivation(apart from the coupling into the core of the waveguide). In the

362 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 13, NO. 2, APRIL 2004
Fig. 10. (a) Experimental and theoretical static calibration curves (optical losses versus the applied acceleration to the optical accelerometer). The experimentaldata is rescaled. (b) Sinusoidal acceleration applied to the device (top) and its output (down).
former case, light injected in the second cladding layer is fastlyabsorbed. The small amount of light coupled in the silicon ni-tride has a high beam broadening at the gaps. Hence, a negligiblecontribution to the total output power. Similar to the behaviorobserved in optical fibers, light injected in the passivation is ableto propagate a certain length (cladding or passivation modes).Nevertheless, the roughness of the upper interface of the passi-vation, together with the absence of cross-section confinementand the expectable presence of impurities on its surface causesthese modes to have high absorption. Therefore, the differenceon the behavior observed for positive and negative accelerationscan be explained considering the geometry of the device:
A negative acceleration makes the seismic mass to movedownwards. Under this situation, light outcoming from the firstwaveguide is injected into the core and the passivation layer ofthe sensing waveguide at the first gap. The sensing waveguideover the seismic mass is long enough (4000 against 500
of the output and input waveguides) to make negligiblethe amount of power corresponding to the passivation modesthat reaches the end of the sensing waveguide. At the secondgap, light is coupled into the core and the Fabry–Pérot of theoutput waveguide. As previously mentioned, the amount oflight coupled in the antiresonant pair does not contribute tothe output power. Thus, for negative accelerations there is nocontribution of neither the light coupled into the Fabry–Pérotnor the passivation. Conversely, for positive accelerationsthe mass move upwards, light is coupled into the core andthe Fabry–Pérot at the first gap and into the core and thepassivation at the second. Since the output waveguides are only500 long, it is reasonable to expect a certain contributionof the passivation modes at the output power collected by themultimode optical fiber. This causes the lowering of the lossesfor positive accelerations, conferring the accelerometer itsasymmetrical response.
Obviously, if there was no passivation, all the power notinjected into the core of the output waveguide would be lost,resulting in the predicted symmetrical response. However, theelimination of that protection layer would make the packaging
process much more difficult and the life of the device muchshorter, so the presence of a passivation in most MOEM’sdevices is highly recommended. One possible solution to thisproblem of asymmetry in the response of the device is toenlarge the output waveguide, in order that the amount of lightguided by the passivation that reaches the output fiber could benegligible, as it happens in the sensing waveguide. Comparisonbetween the simulated results with and without passivationconfirms this latter discussion, which is also in agreement withmeasured experimental data.
From the experimental curve, it can also be observed thatminimum losses are not obtained at 0 g. It has a slight displace-ment 0.17 g that correspond to vertical displacement of themass of . This small offset could by caused by anangular error on the mounting of the accelerometer to the alu-minum pieces and Ferris wheel, by cross-accelerations and/orby small residual stresses on the devices. It has to be noticedthat the offset is clearly small, as expected from a stress-freestructure.
The theoretical curves in Fig. 10(a) are not re-ranged. There-fore, the values for 0 g are not zero. The origin of these offsetis due to the losses caused by the beam broadening produced atthe gaps between the waveguides located at the frame and at themass.
It is also illustrate in Fig. 10(a) that the output of the deviceis not linear close to 0 g and in addition with this configura-tion it is not possible to differentiate between positive and neg-ative accelerations. However, these issues can be easily solvedby working in the left or right part of the experimental curve. Inorder to work in this region, it is only necessary to introduce asmall misalignment between the waveguides on the frame andon the mass. For example, a small silicon etching of 0.5 atthe frame of the die could be done before the waveguides defi-nition in the technological process.
C. Dynamic Test
The devices have also been qualitative characterized by dy-namic excitation. A sinusoidal acceleration has been applied to

PLAZA et al.: BESOI-BASED INTEGRATED OPTICAL SILICON ACCELEROMETER 363
the device by a piezoelectric disc. The output of the accelerom-eter versus the acceleration is shown on Fig. 10(b). The fre-quency of the output signal is double of the input because theoutput of the accelerometer decreases for negative and for pos-itive accelerations (the two directions induce misalignments).The height difference between two consecutive peaks are dueto the static gravitational 1 g acceleration during the test thatintroduce a shift of the curve.
V. CONCLUSION
An stress-free integrated optical accelerometer combiningthick multilayered ARROW waveguides and silicon microme-chanical structures has, for the first time, been designed,fabricated and characterized. The accelerometer type is aquad beam design to permit the vertical displacement of themass. It consists of one single mass and four lateral beamsto increase the mechanical sensitivity. Self-aligned ARROWwaveguides are defined in the mass and in the frame of thechip working at a wavelength of 633 nm. The mechanicalperformance of the device has been optimized by FEM toobtain a mechanical sensitivity of 1 . The fabricationprocess is based on BESOI wafers with special care in avoidingundesired stresses on the weak mechanical parts. The siliconwafer is anodically bonded to a glass wafer with cavities toreduce residual package stresses and to control the dampingof the accelerometer. The devices have been protected byphotoresist during the sawing of the devices. They also havebeen protected by photoresist and wax during the polishingof the dice. V-grooves chips and a special aluminum pieceshave been used for the characterization of the accelerometers.Reference waveguides were measured by end-fire couplingproviding radiation and insertion losses of 0.3 dB/cm and 2.5dB respectively. The total losses of the accelerometer directlycoupled to input and output optical fibers was 6.8 dB but afterstacking they increase to 18.3 dB due to polishing defects. Thepolishing of the devices consisting in a combination of siliconand a glass parts has to be improved or avoided to reduce thetotal loss value. The static characterization of the devices showsan optical sensitivity of 2.3 dB/g for negative acceleration and1.7 dB/g for positive acceleration with a equivalent residualoffset of 0.17 . The output level is large enough for a goodcharacterization with a measured repeatability of around 6%due to fiber optics bending. Therefore, the packaging have tobe improved to reduce repeatability of the devices. It is alsoobserved a nonsymmetric response for positive and negativeaccelerations that we have found by optical simulations that itis originated by the passivation layer over the waveguides.
As a final conclusion the proposed designed and fabricatedstructure works properly as accelerometer and the characteri-zation results are in good agreement with the mechanical andoptical simulations.
ACKNOWLEDGMENT
The authors would like to thank D+T Microelectrónica A.I.Efor their support. They would also like to thank to S. Hidalgoand T. Fauquet for the polishing of the devices.
REFERENCES
[1] R. H. Grace and P. Salomon, “Making business with microsystems.Microsystems/MEMS/Micromachines-on the move from technologyto business,” MSTnews, International Newsletter on Microsystems andMEMS, vol. 5/01, pp. 4–8, 2001.
[2] Market Analysis for Microsystems, NEXUS.http://www.nexus-emsto.com [Online]
[3] Y. Kanda, “A graphical representation of the piezoresistance coefficientsin silicon,” IEEE Trans. Electron Devices, vol. ED-29, pp. 64–70, Jan.1982.
[4] E. Peeters, S. Vergote, B. Puers, and W. Sansen, “A combined silicon fu-sion and glass/silicon anodic bonding for uniaxial capacitive accelerom-eter,” in MME’92 Third European Workshop on Micromachining Mi-cromechanics and Microsystems, Leuven, Belgium, 1992.
[5] M. Ohkawa, M. Izutsu, and T. Sueta, “Integrated optic accelerometeremploying a cantilever on silicon substrate,” Jpn. J. Appl. Phys., vol.28, no. 2, pp. 287–288, 1989.
[6] G. Schröpfer, W. Elflein, M. Labachelerie, H. Porte, and S. Ballandras,“Lateral optical accelerometer micromachined in (100) silicon with re-mote readout based on coherence modulation,” Sens. Actuators, Phys.A, vol. 68, pp. 344–349, 1998.
[7] E. Abbaspour-Sani, R. Huang, and C. Y. Kwok, “A novel optical ac-celerometer,” IEEE Electron Device Lett., vol. 16, pp. 166–168, May1995.
[8] J. Marty, A. Malki, C. Renouf, P. Lecoy, and F. Baillieu, “Fibber opticaccelerometer using silicon micromachining techniques,” Sens. Actua-tors, Phys. A, vol. 46–47, pp. 470–473, 1995.
[9] J. Kalenik and R. Pajak, “A cantilever optical-fiber accelerometer,” Sens.Actuators, Phys. A, vol. A 68, pp. 350–355, 1998.
[10] D. Uttamchandani, D. Liang, and B. Culshaw, “A micromachined siliconaccelerometer with fiber optic interrogation,” in Proc. SPIE IntegratedOptics and Microstructures, vol. 1793, 1992, pp. 27–33.
[11] K. E. Burchan, G. N. De Brabander, and J. Tboyd, “Micromachinedsilicon cantilever beam accelerometer incorporating an integrated op-tical waveguide,” in Integr. Opt. Microstruct.: SPIE, 1992, vol. 1793,pp. 12–18.
[12] M. A. Duguay, Y. Kokubun, and T. L. Koch, “Antiresonant reflectingoptical waveguides in SiO2-Si multilayer structures,” Appl. Phys. Lett.,vol. 49, no. 1, pp. 13–15, 1986.
[13] T. Storgaard-Larsen, S. Bouwstra, and O. Leistiko, “Opto-mechanicalaccelerometer based on strain sensing by a Bragg grating in planar wave-guide,” Sens. Actuators, Phys. A, vol. A 52, pp. 25–32, 1996.
[14] T. Tschan, N. de Rooij, and A. Bezinge, “Analytical and FEM mod-eling of piezoresistive silicon accelerometers: predictions and limita-tions compared to experiments,” Sens. Mater. 4, pp. 189–203, 1992.
[15] I. Garcés and F. Villuendas et al., “Analysis of leakage properties andguiding conditions of rib antiresonant reflecting optical waveguides,” J.Lightwave Technol., vol. 14, pp. 798–805, May 1996.
[16] T. Baba and Y. Kokubun, “Dispersion and radiation loss characteristicsof antiresonant reflecting optical waveguides-numerical results and an-alytical expressions,” J. Quant. Elect., vol. 28, no. 7, pp. 1689–1700,1992.
[17] J. A. Plaza, J. Esteve, and E. Lora-Tamayo, “Simple technology for bulkaccelerometer based on bond and etch back silicon on insulator wafers,”Sens. Actuators, Phys. A, vol. 68, pp. 299–302, 1998.
[18] M. Bao, C.Chr. Burrer, J. Esteve, J. Bausells, and S. Marco, “Etchingfront control of h100i strips for corner compensation,” Sens. Actuators,Phys. A, pp. 717–732, 1993.
José A. Plaza was born in Cerdanyola del Vallés,Barcelona, Spain, in 1968. He received the physi-cist degree and the Ph.D. degree in electronicsengineering from the Autonomous University ofBarcelona in 1992 and 1997, respectively.
Currently, he is working in the Departmentof Silicon Technologies and Microsystems ofthe National Centre of Microelectronics (CNM),Bellaterra, Spain. His research focuses on the design,fabrication and characterization of accelerometers,pressure sensors, anodic bonding, and microfluidics.

364 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 13, NO. 2, APRIL 2004
Andreu Llobera was born in Barcelona, Spain, in1974. He received the physics degree and the Ph.D.degree in physics from the Universitat Autònoma deBarcelona in 1997 and 2002, respectively.
He currently holds a postdoctoral position atthe Institut füur Mikrotechnik, belonging to theTechnishe Universität Braunschweig, Germany. Hisresearch activities include the design, simulation andcharacterisation of integrated optical devices, and thedevelopment of new materials for optoelectronics.
Carlos Dominguez received the M.S. and Ph.D.degrees in chemistry from the Universidad Com-plutense of Madrid, Spain, in 1980 and 1985,respectively.
He became a Member of Scientific Staff atthe Instituto de Microelectrónica de Barcelona(IMB-CNM, CSIC), Spain, in 1986. Since 1991,he has been a Senior Scientific Researcher atIMB-CNM, CSIC. He is involved in chemicalvapour deposition processes and wet and dryetch processes. Currently, he is working on the
development of an integrated optical technology based on silicon for sensorsand broad-band telecommunications applications.
Jaume Esteve was born in Parets del Vallés,Barcelona, Spain, in 1961. He received the Ph.D.degree in physical electronics from the University ofBarcelona in 1988.
In 1990, he joined the CNM’s Department of Sil-icon Technologies and Microsystems as a Senior Re-search Scientist. His areas of interest include siliconmicromachining technologies and their application tointegrated sensors and actuators.
Iñigo Salinas was born in Pamplona (Navarra),Spain, in 1973. He received the M.S. degree inphysics and the Ph.D. degree from the SciencesFaculty at the University of Zaragoza, Spain, in 1996and 2003, respectively.
He currently holds an academic position in theElectrical Engineering and Comunications Depart-ment, University of Zaragoza, and is a Memberof the Instituto de Investigación en Ingeniería deAragón (I3A). His main research interests areintegrated optics, WDM optical networking, and
optical instrumentation.
Jorge Garcia was born in San Sebastián, Spain, in1968. He received the M.S. and Ph.D. degrees in en-gineering from the University of Navarra, Spain, in1992 and 1997, respectively.
Currently he is working in the Department ofMicrosystems of Ikerlan in Mondragon, Spain.His research focuses on the simulation, design,fabrication and characterization of pressure sensors,electroplating, and microoptics.
J. Berganzo was born in Vitoria, Spain, in 1965. Hereceived the B.S. degree in electronic engineeringfrom the Mondragon University, Mondragon, Spain,and the M.S. degree in electrical engineering fromtheLausana’s Swiss Federal Institute of Technologyin 1990.
Currently, he is working in the Microsystems Areaof Ikerlan, Mondragon. His research focuses on thedesign, fabrication, and characterization of mechan-ical sensors, microfluidics and packaging technolo-gies.
Copyright © 2022 FDOKUMEN