
Appendix A Software Installation
111
Appendix A Software Installation The attached software system EASY-FIT contains most of the presented examples and especially all of the test problems listed in Chapter 4 and Appendix B. We offer the possibility to repeat some of the test runs, to try alternative solution and discretization methods, or to change scaling parameters and solution tolerances. The attached codes contain the mathematical algorithms discussed in Chapter 2, and allow the numerical identification of parameters in any of the dynamical systems under investigation. All discretization schemes of Chapter 2, ODE solvers, and additional techniques like multiple shooting etc. are available. EASY-FIT consists of a database for model data, experimental data, and results and of two executable files containing the numerical algorithms: MODFIT parameter estimation in explicit functions, steady state systems, Laplace transforms, ordi- nary differential equations, and differential algebraic equations PDEFIT parameter estimation in one-dimensional time-dependent partial differential equations and partial differential algebraic equations The following notes outline system installation and hardware requirements. 1. Hardware and Software Requirements EASY-FIT requires some system resources to run in a smooth and efficient way. Recommended minimal hardware configuration is a Pentium III with 128 MB memory on board and 600 MHz. The full installation requires about 70 MB on hard disk. The system runs under Windows 95, Windows 98, Windows NT, and Windows 2000. EASY-FIT comes with the run-time and royalty-free version of Microsoft Access. All model functions are defined in the PCOMP modeling language to be interpreted and evaluated during run time. Derivatives, as far as needed, are computed by automatic differentiation. The full version of EASY-FIT allows also the most flexible input of the underlying model functions in the form of Fortran code, and has interfaces for Compaq Visual Fortran, Watcom F77/386, Salford FTN77, Lahey F77L-EM/32, Absoft Pro Fortran, and Microsoft Fortran PowerStation, where the compiler and linker options can be altered and adapted interactively. 2. System Setup To install EASY-FIT, one has to insert the CD-ROM into a drive and to execute the installation program SETUP.EXE. The run-time version of Microsoft Access is loaded together with EASY-FIT. It is recommended to use the typical installation unless it is known a priori which modules are needed and 285
-
Upload
khangminh22 -
Category
Documents
-
view
2 -
download
0
Transcript of Appendix A Software Installation

Appendix A Software Installation
The attached software system EASY-FIT contains most of the presented examples and especially all of the test problems listed in Chapter 4 and Appendix B. We offer the possibility to repeat some of the test runs, to try alternative solution and discretization methods, or to change scaling parameters and solution tolerances. The attached codes contain the mathematical algorithms discussed in Chapter 2, and allow the numerical identification of parameters in any of the dynamical systems under investigation. All discretization schemes of Chapter 2, ODE solvers, and additional techniques like multiple shooting etc. are available.
EASY-FIT consists of a database for model data, experimental data, and results and of two executable files containing the numerical algorithms:
MODFIT parameter estimation in explicit functions, steady state systems, Laplace transforms, ordinary differential equations, and differential algebraic equations
PDEFIT parameter estimation in one-dimensional time-dependent partial differential equations and partial differential algebraic equations
The following notes outline system installation and hardware requirements.
1. Hardware and Software Requirements EASY-FIT requires some system resources to run in a smooth and efficient way. Recommended minimal
hardware configuration is a Pentium III with 128 MB memory on board and 600 MHz. The full installation requires about 70 MB on hard disk. The system runs under Windows 95, Windows 98, Windows NT, and Windows 2000. EASY-FIT comes with the run-time and royalty-free version of Microsoft Access.
All model functions are defined in the PCOMP modeling language to be interpreted and evaluated during run time. Derivatives, as far as needed, are computed by automatic differentiation. The full version of EASY-FIT allows also the most flexible input of the underlying model functions in the form of Fortran code, and has interfaces for Compaq Visual Fortran, Watcom F77/386, Salford FTN77, Lahey F77L-EM/32, Absoft Pro Fortran, and Microsoft Fortran PowerStation, where the compiler and linker options can be altered and adapted interactively.
2. System Setup To install EASY-FIT, one has to insert the CD-ROM into a drive and to execute the installation
program SETUP.EXE. The run-time version of Microsoft Access is loaded together with EASY-FIT. It is recommended to use the typical installation unless it is known a priori which modules are needed and
285

286 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
which not. In case of compact setup, the Microsoft Access run-time version is not loaded and it is assumed that Microsoft Access 97 is available.
Since all entries are generated automatically by the setup program, the only thing to do is to open the start menu, then the programs menu, and to click the new EASY-FIT icon. A welcome window is displayed and the main form of the database is opened.
3. Packing List EASY-FIT consists of a user interface in the form of a relational database running under Microsoft
Access, and some numerical routines. The following list contains the more essential files submitted:
MODFIT.EXE
PDEFIT.EXE
PARSE.EXE MODFIT.INC PDEFIT.INC SP _PLOT.EXE EF_KLUW.MDE
EASY_FIT.HLP EASY -FIT.ICO EASY -FIT.PDF SETUP PROBLEMS
Notes:
Solving parameter estimation problems in explicit models, steady state equations, ordinary differential equations, differential algebraic equations, and Laplace transforms. Solving parameter estimation problems in systems of one-dimensional partial differential equations and partial differential algebraic equations. PCOMP parser for evaluation of functions and automatic differentiation. Include file with dimensioning parameters for MODFIT. Include file with dimensioning parameters for PDEFIT. Standard plot program, input data read from files. Main database of EASY-FIT containing data, forms, reports, macros, and modules. Corresponding help file. Icon file for EASY-FIT. Adobe Acrobat Reader (PDF) file containing complete documentation. Directory containing setup program for EASY-FIT. Directory for test example files with extension FUN and result files.
Windows, Microsoft, PowerStation are registered trademarks of Microsoft Corp. 2 WATCOM is a registered trademark of WATCOM Systems Inc. 3 FTN77 is a trademark of Salford Software Ltd. 4 Adobe, Acrobat are registered trademarks of Adobe Systems Inc.

Appendix B Test Examples
The reason for attaching a comprehensive collection of test problems is to offer the possibility of trying out different discretization procedures, differential equation solvers, and data fitting algorithms. The problems can be used for selecting a reference problem when implementing one's own dynamical models, or to test the accuracy and efficiency of the algorithms discussed in this book, for example for comparisons with other numerical methods. All problems are executable by EASY-FIT, see Appendix A, that is attached on CD-ROM.
In many cases, parameter estimation problems are found in the literature or are based on cooperation wit h people from other academic or industrial institutions. In many other cases. however, differential equations are taken from research articles about numerical simulation algorithms, and are adapted to construct a suitable data fitting test problem. Thus, some model equations do not coincide exactly with those given in the corresponding references and the numerical solution is sometimes different from the one found in the reference.
We summarize a few characteristic data and the application background of the test problems that are available on the CD-ROM, from where further details can be retrieved. Besides problem name and some figures characterizing problem size, we present also information on how measurement data are obtained.
E SO UO.5 U1 U5 U10 U50 NO.OOl NO.01 NO.1 NlO X none
experimental data from literature or private communication. siInulation without error, simulation with uniformly distributed error of 0.5 %, simulation with uniformly distributed error of 1 %, simulation with uniformly distributed error of 5 %, simulation with uniformly distributed error of 10 %, simulation with uniformly distributed error of 50 %, simulation with normally distributed error, cr = 0.001, simulation with normally distributed error, cr = 0.01, simulation with normally distributed error, cr = 0.1, simulation with normally distributed error, cr = 10, eornparison with exact solution, no experimental data set, for example least squares test problem.
The difference between simulated and experimental data is that exact parameter values are known in the first case. Be8ides a large collection of problems with practical experimental date, there are also a few others where the data are constructed, i.e., are determined more or le"8 by hand. In many other situations, the exact solution of the differential equation is known and u"ed to simulate experimental data. These test examples can be used to check the accuracy of discretization formulae or the quality of ODE solvers.
287

288 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
Moreover, we show some references in the column headed by ref, from where further details can be retrieved. Either the data fitting problem is described in detail, or at least the mathematical background of the model is outlined. In case of an empty entry, the model is provided by private communication and not published anywhere else, or a related reference is unknown to the author.
To summarize, we offer test problems for the following model classes:
explicit model functions Laplace transforms steady state equations ordinary differential equations differential algebraic equations partial differential equations partial differential algebraic equations sum
1. Explicit Model Functions We proceed from r measurement sets of the form
175 8
38 463
33 247 35
1,000
with It time values, Ie concentration values, and I = Itler corresponding measured experimental data. Moreover, we assume that I weights wt are given. However, weights can become zero in cases when the corresponding measurement value is missing, if artificial data are needed, or if plots are to be generated for functions for which experimental data do not exist. Thus, the subsequent table contains the actual number l:s; I of terms taken into account in the final least squares formulation.
Usually, we proceed from the £2- or Euclidean norm to formulate a parameter estimation problem of the form (3.7),
P E lRn :
min ~~=, ~:~, ~~:, (w7j (hk(p,ti,Cj) - y7j ))2
gj(P) =0, j=I, ... ,me ,
9j(P) ;::0, j=me+ 1, ... ,mr ,
PI:S;P :S;Pu ,
where we assume that fitting criteria hk(p, t, c), k = 1, ... , r, and constraints gj(P), j = 1, ... , m r , are con-tinuously differentiable functions subject to p. The model function h(p, t, c) = (h,(p, t, c), ... , hr(P, t, C))T does not depend on the solution of an additional dynamical system and can be evaluated directly from a given parameter vector p that is to be estimated at given time and concentration values t and c. All explicit test problems are listed in Table B.l.

Tab
le B
.l.
Exp
lici
t M
odel
Fun
ctio
n
nam
e n
l m
, T
ne
2VA
LL
EY
S
2 4
0 0
4BA
R-L
NK
4
24
2 0
AP
PR
X3
6
10
0 0
AT
RO
P_E
X
4 24
0
0 B
EN
NE
TT
5
3 15
4 ()
0
BIR
D M
ILL
3
14
0 0
BO
XB
OD
2
6 0
0 B
UR
GE
R_W
3
50
0 0
CA
T_S
EP
5
5 ()
0
CE
ME
NT
28
63
0
0 C
HW
IRU
TI
3 21
4 0
0 C
HW
IRU
T2
3 54
0
0 D
A-.X
4
72
0 0
DA
NW
OO
D
2 6
0 0
DF
EI
8 9
0 0
DF
E2
7
15
1 D
NS
3
30
1 (J
DO
AS
21
10
0 (J
0 E
_FIT
3
12
0 0
EC
KE
RL
E4
3
35
0 0
EL
A_T
UB
X
3 40
0
0 E
NS
O
9 16
8 0
0 E
NZ
RE
AC
4
13
0 0
EW
_WA
VE
X
2 48
0
0 E
XP
_FIT
7
33
0 0
EXP~ITI
2 28
0
0 E
XP
_FIT
2 2
39
0 0
back
grou
nd
Aca
dem
ic t
est
prob
lem
wit
h t.w
o lo
cal
min
ima
Des
ign
of a
fou
r b
ar l
inka
ge
Rat
iona
l ap
prox
imat
ion
of d
ata
Atr
opin
-cha
se b
indi
ng,
line
ar m
odel
S
uper
cond
ucti
vity
mag
neti
zati
on m
odel
ing
(NIS
T s
tudy
) N
on-i
dent
ifia
bili
ty
Bio
chem
ical
oxy
gen
dem
and
(NIS
T s
tudy
) E
xpli
cit
solu
tion
of
Bur
ger'
s eq
uati
on w
ith
eps=
0.00
05
Cat
aly
sato
r se
para
tion
pro
blem
H
arde
ning
of
cem
ent
Ult
raso
nic
refe
renc
e bl
ock
(NIS
T s
tudy
) U
ltra
soni
c re
fere
nce
bloc
k (N
IST
stu
dy)
MD
I si
mul
atio
n E
nerg
y ra
diat
ed f
rom
a c
arbo
n fi
lam
ent
lam
p (N
IST
stu
dy)
Exp
lici
t t.e
st. f
unct
ion
wit
h lo
cal
solu
tion
s, c
ycli
ng m
odel
fun
ctio
n et
c.
Exp
lici
t te
st f
unct
ion
wit
h ti
me-
depe
nden
t m
odel
cha
nge
Feu
lgen
-hyd
roly
sis
of D
NS,
bio
chem
ical
rea
ctio
n D
iffe
rent
ial
opti
cal
spec
tral
abs
orpt
ion
Rat
iona
l-ex
pone
ntia
l d
ata
fitt
ing
Cir
cula
r in
terf
eren
ce t
ran
smit
tan
ce (
NIS
T s
tudy
) W
aves
pro
paga
ting
in
a li
quid
-fil
led
elas
tic
tub
e (K
DV
B e
quat
ion)
A
tmos
pher
ic p
ress
ure
diff
eren
ces
(NIS
T s
tudy
) E
nzym
e re
acti
on,
rati
onal
app
roxi
mat
ion
Wav
e pr
opag
atio
n in
med
ia w
ith
nonl
inea
r st
eepe
ning
an
d d
ispe
rsio
n E
xpon
enti
al d
ata
fitt
ing,
exp
lici
t so
luti
on o
f li
near
OD
E
Exp
onen
tial
dat
a fi
ttin
g E
xpon
enti
al d
ata
fitt
ing
ref
data
[4
00]
E
X
[23]
U
5 E
E
[4
00],
[37]
U
5 [5
3]
E
NO
.01
E
[92]
E
E
E
E
[9
2]
E
SO
U5
[345
] E
SO
E
E
[2
20]'
[456
] U
5 [2
23]
E
E
[182
] U
S SO
E
E
( con
tinu
ed)
;,.. '0
'0
~ ~ ~ t.:J ~
~
~ '" ;l "'"' ~. t.:J ~
~ ~ f'l ~ " '" N
00
t.D

na
me
n I
mr
me
back
grou
nd
ref
data
t-.:
> <.
0
EX
P_F
IT3
2 27
0
0 E
xpon
enti
al d
ata
fitt
ing
E
0
EX
P..F
IT4
5 19
0
0 E
xpon
enti
al d
ata
fitt
ing
E
EX
P..F
IT5
10
20
0 0
Exp
onen
tial
dat
a fi
ttin
g E
E
XP
..FIT
6 2
4 0
0 E
xpon
enti
al d
ata
fitt
ing
E
EX
P -.
PI
2 3
0 0
Tes
t ex
ampl
e: t
rigo
nom
etri
c fu
ncti
ons,
ove
rdet
erm
ined
[4
07]
none
E
XP
-.P2
2 3
0 0
Tes
t ex
ampl
e: r
atio
nal
func
tion
s, o
verd
eter
min
ed
[407
] no
ne
EX
P-.P
4 20
20
0
0 T
est
exam
ple:
lin
ear
func
tion
s [4
07]
none
E
XP-
.P5
2 2
0 0
Tes
t ex
ampl
e: p
olyn
omia
l fu
ncti
ons
[407
] no
ne
EX
P-.P
6 2
2 0
0 T
est
exam
ple:
pol
ynom
ial
func
tion
s [4
07]
none
E
XP-
.P7
2 1
0 0
Tes
t ex
ampl
e: p
olyn
omia
l fu
ncti
ons,
und
erde
term
ined
[4
07]
none
E
XP
_SM
PL
2
80
0 0
Sing
le t
erm
exp
onen
tial
mod
el,
larg
e er
rors
in
dat
a U
50
EX
P_T
ES
T
4 20
0 0
0 O
verl
ap o
f tw
o ex
pone
ntia
l te
rms
U5
EX
P2T
ER
M
5 20
0
0 T
wo-
expo
nent
ial
mod
el
E
GA
MM
AS
7 27
0
0 A
naly
sis
of a
gam
ma
spec
trum
E
~
GA
USS
16
40
1 0
0 D
istr
ibut
ion
of p
oint
s in
Car
tesi
an s
pace
fit
ted
to l
inea
r co
mbi
nati
on o
f G
aus-
E
~ si
an f
unct
ions
gs
GA
USS
1
8 25
0 0
0 T
wo
wel
l-se
para
ted
Gau
ssia
ns (
NIS
T s
tudy
) E
.....
G
AU
SS2
8 25
0 0
0 T
wo
slig
htly
-ble
nded
Gau
ssia
ns (
NIS
T s
tudy
) E
~
GA
USS
3 8
250
0 0
Tw
o st
rong
ly-b
lend
ed G
auss
ians
(N
IST
stu
dy)
E
t-<
GE
AR
6
33
2 0
Gea
r w
ith
six
part
s E
~
GE
O-.
PR
OB
3
1 2
2 M
axim
um d
ista
nce
from
ori
gin
to i
nter
sect
ion
of e
llips
oid
wit
h hy
perb
oloi
d [2
75]
none
~
GL
U.R
AT
E
4 13
0
0 In
-viv
o gl
ucos
e tu
rnov
er r
ate
U5
HA
HN
I 7
236
0 0
The
rmal
exp
ansi
on o
f co
pper
(N
IST
stu
dy)
E
~ H
EA
T-.X
X
2 99
0
0 L
inea
r di
ffus
ion
wit
h co
nsta
nt p
aram
eter
s, e
xact
sol
utio
n X
"'3
~
HY
DE
NZ
YM
5
41
0 0
Hyd
roph
obe
enzy
mes
and
sub
stra
tes
SO
~
ILL
_CO
ND
10
0 10
0 0
0 Il
l-co
ndit
ione
d te
st f
unct
ion,
man
y pa
ram
eter
s X
C':
l IN
FIN
ITE
3
21
0 0
Infi
nite
ly m
any
solu
tion
s SO
~
INT
EG
-.X
3
25
0 0
Pop
ulat
ion
dyna
mic
s [3
37]
U5
tl
INT
PO
L
3 10
1
0 In
terp
olat
ion
rout
ines
, al
so n
on-c
onti
nuou
s, n
on-s
moo
th f
orm
ulat
ion
SO
~ IS
OM
ER
-.X
5
40
0 0
The
rmal
iso
mer
izat
ion
of a
lpha
-pin
ene
to d
ipen
tene
[5
2],
[400
] E
;:"
.:
(con
tinu
ed)
es ~ t-<
U:l ~ ~ ~

na
me
n t
me
KIR
BY
2 5
151
0 L
AN
CZ
OS
1 6
24
0 L
AN
CZ
OS
2 6
24
0 L
AN
CZ
OS
3 6
24
0 L
IN_C
MP
1 7
10
3 L
IN_C
MP
2 9
54
3 L
IN_C
MP
3 3
19
0 L
INJI
CJe
3
165
0 L
IN..K
IN
6 32
0
LIN
.MO
D
12
30
0 L
IN_V
IS
22
84
9 L
KIN
Je
3 28
0
LK
INJe
3
2 78
0
MA
C-E
CO
6
186
0 M
AR
KE
T
7 10
0 0
MG
H09
4
11
0 M
GH
10
3 16
0
MG
H17
5
33
0 M
ICH
ME
NT
2
12
0 M
ISR
A1A
2
14
0 M
ISR
AlB
2
14
0 M
ISR
A1C
2
14
0 M
ISR
AlD
2
14
0 M
IX-.P
AT
1 2
38
1 M
IX_P
AT
2 3
33
0 M
IX_P
AT
3 1
27
0 M
IX-.
PAT
4 3
28
0 M
ON
OD
4
10
0 M
OR
TA
LT
Y
2 9
0 N
EL
SO
N
3 12
8 0
me
back
grou
nd
0 S
cann
ing
elec
tron
mic
rosc
ope
(NIS
T s
tudy
) 0
Exp
onen
tial
non
line
ar r
egre
ssio
n (N
IST
stu
dy)
0 E
xpon
enti
al n
onli
near
reg
ress
ion
(NIS
T s
tudy
) 0
Exp
onen
tial
non
line
ar r
egre
ssio
n (N
IST
stu
dy)
2 L
inea
r co
mpa
rtm
ents
wit
h b
olus
adm
inis
trat
ion,
sin
gle
dose
3
Lin
ear
com
part
men
ts w
ith
mul
tido
se a
dmin
istr
atio
n (e
xtra
vasc
ular
) 0
M ul
tido
se a
dmin
istr
atio
n (e
xtra
vasc
ular
) 0
Lin
ear
heat
con
duct
ion
0 L
inea
r ph
arm
acok
inet
ic m
odel
wit
h 3-
com
part
men
ts a
nd
lag
tim
e 0
Lin
ear
dat
a fi
ttin
g w
ith
erro
rs i
n ti
me
valu
es
0 L
inea
r-vi
scoe
last
ic m
ater
ial
law
in
freq
uenc
y do
mai
n 0
Sim
ple
line
ar c
ompa
rtm
ent
mod
el (
expl
icit
) 0
Sim
ple
line
ar c
ompa
rtm
ent
mod
el w
ith
thre
e do
ses
(exp
lici
t fo
rmul
atio
n)
0 M
acro
econ
omic
tim
e se
ries
of
curr
ency
not
es i
n ci
rcul
atio
n 0
Dyn
amic
eco
nom
ic m
arke
t 0
Rat
iona
l no
nlin
ear
regr
essi
on (
NIS
T s
tudy
) 0
Exp
onen
tial
non
line
ar r
egre
ssio
n (N
IST
stu
dy)
0 E
xpon
enti
al n
onli
near
reg
ress
ion
(NIS
T s
tudy
) 0
Mic
hael
is-M
ente
n ki
neti
cs
0 M
onom
olec
ular
ads
orpt
ion
(NIS
T s
tudy
) 0
Mon
omol
ecul
ar a
dsor
ptio
n (N
IST
stu
dy)
0 M
onom
olec
ular
ads
orpt
ion
(NIS
T s
tudy
) 0
Mon
omol
ecul
ar a
dsor
ptio
n (N
IST
stu
dy)
0 M
ixin
g p
atte
rn i
nsid
e a
poly
mer
izat
ion
reac
tor
0 M
ixin
g p
atte
rn i
nsid
e a
poly
mer
izat
ion
reac
tor
0 M
ixin
g p
atte
rn i
nsid
e a
poly
mer
izat
ion
reac
tor
0 M
ixin
g p
atte
rn i
nsid
e a
poly
mer
izat
ion
reac
tor
0 M
onod
-Wym
nan-
Cha
ngeu
x ki
neti
c eq
uati
on
0 M
orta
lity
rat
e by
Gom
pert
z fu
ncti
on
0 A
naly
sis
of p
erfo
rman
ce d
egra
dati
on d
ata
(NIS
T s
tudy
)
ref
data
E
[2
45)
E
[245
) E
[2
45)
E
[197
) U
5 [1
97)
U5
[197
) E
[2
J U
5 U
5 [4
45J
E
X
E
U5
[436
J N
lO
E
[309
J E
[3
09J
E
[309
], [3
29J
E
[400
], [4
75J
E
E
E
E
E
E
E
E
E
[400
], [3
56J
U5
[203
J U
5 [3
20J
E
(con
tinu
ed)
~
"0 ~ ~ ~ ~ ~
:g (1)
;:l R.
f:j"
~
~
~ ~ ., .@
c;;- '" t-:)
(0
.....
.

na
me
n l
me
me
back
grou
nd
ref
data
t-
,;)
<.0
OA
T 1
4
6 0
0 B
io-m
ass
of o
ats
[362
] E
t-
,;)
OA
T2
3 6
0 0
Bio
-mas
s of
oat
s [3
62]
E
OP
T_K
INX
6
60
2 0
Lin
ear
kine
tics
wit
h va
riab
le s
wit
chin
g ti
mes
(op
tim
al c
ontr
ol p
robl
em)
none
O
SC
ILL
_S
16
50
0 0
Osc
illa
ting
sys
tem
wit
h ex
act
know
n so
luti
on
[493
] SO
O
SCIL
L-.
X
16
50
0 0
Osc
illa
ting
sys
tem
[4
93]
E
PA
RID
120
3 12
1 0
0 P
aram
eter
ide
ntif
icat
ion
mod
el,
J 20
norm
ally
dis
trib
uted
exp
erim
enta
l va
lues
N
O.1
P
AR
ID15
3
16
0 0
Par
amet
er i
dent
ific
atio
n m
odel
, 15
nor
mal
ly d
istr
ibut
ed e
xper
imen
tal
valu
es
NO
.1
PA
RID
30
3 31
0
0 P
aram
eter
ide
ntif
icat
ion
mod
el,
30 n
orm
ally
dis
trib
uted
exp
erim
enta
l va
lues
N
O.1
P
AR
ID60
3
61
0 0
Par
amet
er i
dent
ific
atio
n m
odel
, 60
nor
mal
ly d
istr
ibut
ed e
xper
imen
tal
valu
es
NO
.1
PO
L_A
PP
14
19
1
1 P
olyn
omia
l ap
prox
imat
ion
for
com
puti
ng a
xial
for
ces
E
PO
LM
OD
14
30
0
0 P
olyn
omia
l d
ata
fitt
ing
wit
h er
rors
in
tim
e va
lues
[4
45]
E
PO
LA
RI
6 29
0 0
0 F
luor
esce
nce
of p
olar
izat
ion
filt
er
E
PS
S
5 5
1 0
Pri
mar
y a
nd
sec
onda
ry s
tabl
e m
odel
E
Q
UIN
IDIN
4
4 0
0 P
opul
atio
n ph
arm
acok
inet
ics
of q
uini
dine
[9
3]
E
C;::
RA
D_T
RA
C
3 17
0
0 R
adio
acti
ve t
race
r in
tw
o h
um
an b
od
y c
ompa
rtm
ents
E
~
RA~AN
2 30
3 0
0 R
aman
int
ensi
ty o
f an
isot
rope
pro
bes
[246
] U
5 gs
RA
T_A
PP
4
11
2 2
Rat
iona
l ap
prox
imat
ion
wit
h co
nstr
aint
s [2
63]
E
.....,
RA
T_F
IT
4 11
0
0 F
itti
ng
a r
atio
nal
func
tion
[2
36]
E
S2 R
AT
42
3 9
0 0
Pas
ture
yie
ld w
ith
sigm
oida
l gr
owth
cur
ve (
NIS
T s
tudy
) [3
55]
E
t-,
RA
T43
4
15
0 0
Dry
wei
ght
of o
nion
bul
bs a
nd
top
s (N
IST
stu
dy)
[355
] E
~
RE
FL
EC
T
6 24
0
0 R
efle
ctio
n m
odel
for
col
our
desi
gn
E
~ R
ICH
_GR
3
9 0
0 R
icha
rds
grow
th m
odel
[3
61]
E
RO
SZ
MA
NI
4 25
0
0 Q
uan
tum
def
ects
in
iodi
ne a
tom
s (N
IST
stu
dy)
E
~ R
TD
2
26
1 0
Res
iden
ce t
ime
dist
ribu
tion
E
>-3
:j
S
EQ
_EX
P
3 13
0
0 S
eque
ntia
l ex
peri
men
t [4
00],
[134
] E
C;:
: S
MO
OT
HN
G
3 17
0 0
0 D
ata
smoo
thin
g E
C':
l S
TE
P_R
ES
3
22
0 0
Sec
ond-
orde
r eq
uati
on w
ith
dead
tim
e an
d s
tep
resp
onse
dat
a [4
66]
E
~ S
UL
FA
TE
4
17
0 0
Co
mp
artm
enta
l an
alys
is i
n hu
man
s w
ith
radi
oact
ive
sulf
ate
as t
race
r [4
00]
E
b T
HE
RM
RE
S
3 10
0
0 T
herm
isto
r re
sist
ance
, ex
pone
ntia
l d
ata
fitt
ing
E
~ T
HU
RB
ER
7
37
0 0
Sem
icon
duct
or e
lect
ron
mob
ilit
y (N
IST
stu
dy)
E
~
(con
tinu
ed)
~ S2 t:-<
Crl ~ ~ ~

na
me
n l
rn,.
me
TIME~CT
2 9
0 0
TP
1
2 2
() 0
TP
LA
2
2 0
0 T
PL
B
2 2
0 0
TP
13
2
2 1
0 T
P1
4
2 2
2 T
P2
2
2 0
0 T
P2
02
2
2 0
0 T
P2
03
2
3 ()
0
TP
20
5
2 3
()
0 T
P2
12
2
2 0
0 T
P2
41
3
5 0
0 T
P2
42
3
10
0 0
TP
24
4
3 10
0
0 T
P2
46
3
:l 0
()
TP
24
7
3 3
0 0
TP
25
3
99
0 0
TP
25
6
4 4
0 0
TP
26
0
4 7
0 ()
TP
26
1
4 5
0 0
TP
26
7
5 11
0
0 T
P2
69
5
4 3
3 T
P2
72
6
13
0 0
TP
28
2
10
11
0 0
TP
28
6
20
20
0 0
TP
28
8
20
20
0 0
TP
30
3
18
20
0 0
TP
30
7
2 10
()
0 T
P3
08
2
3 0
0 T
P3
12
2
2 0
0
back
grou
nd
Tim
e ac
tivi
ties
R
osen
broc
k's
ban
ana
func
tion
R
osen
broc
k" s
ban
ana
func
tion
, il
l-co
ndit
ione
d R
Oti
enbr
ock'
s b
anan
a fu
ncti
on,
very
ill
-con
diti
oned
A
cade
mic
tes
t pr
oble
m w
ith
ou
t co
nst
rain
ed q
uali
fica
tion
C
onti
trai
ned
leas
t sq
uare
s pr
oble
m
Co
nst
rain
ed R
Oti
enbr
ock'
s b
anan
a fu
ncti
on
Aca
dem
ic t
est
prob
lem
wit
h a
ttra
ctiv
e lo
cal
solu
tion
S
impl
e d
ata
fitt
ing
pro
ble
m
Lea
st s
quar
es p
robl
em w
ith
th
ree
term
s L
east
tiq
uare
s pr
oble
m w
ith
tw
o te
rms
Lea
st t
iqua
res
prob
lem
, fi
ve p
olyn
omia
l fu
ncti
ons
Ex
po
nen
tial
tes
t fu
ncti
on
Ex
po
nen
tial
tet
it f
unct
ion
Lea
st s
quar
es p
rob
lem
wit
h t
hre
e te
rms
Lea
st s
quar
es p
robl
em,
heli
cal
vall
ey i
n x:
l di
rect
ion
Aca
dem
ic t
est
prob
lem
, hi
ghly
un
stab
le
Lea
st s
quar
es p
robl
em w
ith
fou
r te
rmti
, P
owel
l's f
unct
ion
Lea
st s
quar
es p
robl
em w
ith
sev
en t
erm
s L
east
tiq
uare
s pr
oble
m w
ith
exp
onen
tial
an
d t
rig
on
om
etri
c te
rms
Ex
po
nen
tial
tes
t fu
ncti
on
Con
titr
aine
d le
ast
squa
res
prob
lem
wit
h f
our
line
ar t
erm
s E
xp
on
enti
al t
est
func
tion
L
east
squ
ares
pro
blem
wit
h q
uad
rati
c te
rms
Lea
st s
quar
eti
prob
lem
wit
h q
uad
rati
c te
rms
Lea
st s
quar
es p
robl
em,
20 l
inea
r te
rms
Lea
st s
quar
es p
robl
em w
ith
squ
ared
sum
E
xp
on
enti
al d
ata
fitt
ing
Lea
st s
quar
eti
prob
lem
wit
h t
rigo
nom
etri
c te
rms
Lea
st s
quar
es p
robl
em w
ith
tw
o q
uad
rati
c te
rms,
loc
al s
olut
ion
ref
data
E
[2
01]
none
[2
01]
non
e [2
01]
non
e [2
01]
no
ne
[201
] no
ne
[201
] n
one
[384
] n
one
[384
] X
[384
] no
ne
[384
] no
ne
[384
] no
ne
[384
] X
[3
84]
X
[384
] no
ne
[384
] no
ne
[201
] X
[384
] no
ne
[384
] no
ne
[384
] no
ne
[384
] X
[3
84]
non
e [3
84]
X
[384
] no
ne
[384
] n
one
[384
] n
one
[384
] n
one
[384
] E
[3
84]
none
[3
84]
none
( con
tinu
ed)
~
""'J
""'J
t:"l ~ >;; ~ ~
'Cl
'Cl
(t ~
N
~ ~
~ ~ '" ~ " '" ~
(D
w

l ba
ckgr
ound
re
f da
ta
t-:l
na
me
n m
r m
e <:
0
TP
327
2 44
0
Con
stra
ined
exp
onen
tial
dat
a fi
ttin
g [3
84]
E
.,. T
P33
2 2
200
2 0
Cam
des
ign
prob
lem
[3
84]
E
TP
333
3 8
0 0
Exp
onen
tial
dat
a fi
ttin
g [3
84]
E
TP
334
3 15
0
0 E
xpon
enti
al d
ata
fitt
ing
[384
] E
T
P35
0 4
6 0
0 R
atio
nal
appr
oxim
atio
n [3
84]
E
TP
351
4 7
0 0
Rat
iona
l d
ata
fitt
ing
[384
] E
T
P35
2 4
40
0 0
Exp
onen
tial
and
tri
gono
met
ric
dat
a fi
ttin
g [3
84J
E
TP
354
4 4
1 0
Con
stra
ined
lea
st s
quar
es p
robl
em,
four
qua
drat
ic t
erm
s [3
84]
none
T
P35
5 4
2 3
1 C
onst
rain
ed l
east
squ
ares
pro
blem
, fo
ur q
uadr
atic
ter
ms
and
loca
l so
luti
ons
[384
] no
ne
TP
358
5 20
0
0 E
xpon
enti
al d
ata
fitt
ing
test
fun
ctio
n [3
84]
E
TP
370
6 87
0
0 C
ompl
ex l
east
squ
ares
pro
blem
, si
x va
riab
les
[384
], [3
29]
E
TP
371
9 87
0
0 C
ompl
ex l
east
squ
ares
pro
blem
, ni
ne v
aria
bles
[3
84],
[329
] E
T
P37
2 9
6 12
0
Lea
st s
quar
es p
robl
em,
twel
ve i
nequ
alit
y co
nstr
aint
s [3
84],
[329
] no
ne
TP
373
9 6
6 6
Lea
st s
quar
es p
robl
em,
six
equa
lity
con
stra
ints
[3
84],
[329
] no
ne
~
TP
379
11
65
0 0
Tes
t pr
oble
m o
f O
sbor
ne,
four
exp
onen
tial
ter
ms
[384
], [3
29]
E
~ T
P39
4 20
40
1
1 L
east
squ
ares
pro
blem
wit
h on
e eq
uali
ty c
onst
rain
t [3
84]
none
~
TP
43
4 1
3 0
Ros
en-S
uzuk
i te
st p
robl
em
[201
] no
ne
.....,
TP
46
5 4
2 2
Equ
alit
y co
nstr
aine
d ac
adem
ic t
est
prob
lem
[2
01]
none
~
TP
48
5 3
2 2
Equ
alit
y co
nstr
aine
d ac
adem
ic t
est
prob
lem
[2
01]
none
t:-<
TP
57
2
44
0 C
onst
rain
ed e
xpon
enti
al f
it [2
01]
E
~ T
P6
2
1 R
osen
broc
k's
bana
na f
unct
ion,
Bet
ts'
form
ulat
ion
[201
] no
ne
t;2 T
P70
4
19
0 C
hem
ical
equ
ilib
rium
pro
blem
[2
01]
E
TR
EN
D
6 50
0 1
0 T
rend
cur
ve
E
~ TRIG~PP
2 19
0
0 T
rigo
nom
etri
c ap
prox
imat
ion
for
com
puti
ng a
xial
for
ces
E
""3 ~
TU
BT
AN
K
19
0 0
Com
pari
son
of t
ank
and
tub
ular
rea
ctor
s st
eady
sta
te
[213
] U
5 ~
VA
PO
R
2 11
0
0 V
apor
-liq
uid
equi
libr
ium
[1
17]
E
Q
VIS
C...
EL
A
10
24
0 0
Mem
ory
func
tion
of
visc
o-el
asti
c su
bsta
nces
E
~
WA
VE
..x
3 80
0
0 E
xpli
cit
solu
tion
of
wav
e eq
uati
on
U5
b W
EIB
UL
L
2 12
0
0 W
eibu
ll d
istr
ibut
ion
U5
~ ::.:.: ~ ~ t:-<
rr, ~ ~ ~

APPENDIX B: Appendix B: Test Examples 295
2. Laplace Transforms Now we assume that the data fitting function is given in the form of a vector-valued Laplace transform
H(p, s, c) E IRe depending on the parameter vector p to be ntted, the Laplace variable s, and an optional so-called concentration parameter c. Let function h(p, t, c) be a numerical approximation of the inverse Laplace transform of H(p, 8, c), for instance computed by the formula of Stehfest [429], separately for each component. For more details, see Section 7 of Chapter 2 and Section 2 of Chapter 3.
Proceeding now from I = Itlcr experimental data (t"cJ'Y'~J) and weights w7j , i = 1, ... , It, j = 1, Ic, and k = 1, ... , r, we get the parameter estimation problem
min L::~l L:~'=, L:~'~l (W~J(hk(p,ti,Cj) - y,Zj))2
PI <::: P <::: Pu
General nonlinear constraints arc not permitted in this case. Test problems defined by their Laplace transforms are listed in Table I3.2.
Table B.2. Laplace Transforms
nam,e n background r'ef data CONCS 2 7 Test problem, only concentration values U5 DIFFUS_L 1 99 Linear diffusion with constant parameters U5 LKIN_L 3 26 Simple linear compartment model E LKIN_L3 2 78 Simple linear compartment model, three initial doses U5 PLASTERl 7 7 Pharmaceutic transdermal diffusion (plaster) [483J, [176] E PLASTER2 4 7 Pharmaceutic transdermal diffusion (plaster) [48:1], [176] E PLASTER3 5 12 Plaster diffusion [48:~], [176] E PLASTER4 2 12 Plaster diffusion [48:3], [176] E

296 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
3. Steady State Equations Again, it is supposed that r measurement sets of the form
(ti,Cj,yt) , i = 1, ... ,it, j = 1, ... ,le, k = 1, . .. ,T
are given with It time values, Ie concentration values, and I = ltlcr corresponding measured experimental data. Some of the weights wfj can become zero in cases when the corresponding measurement value is missing, if artificial data are needed, or if plots are to be generated for state variables for which experimental data do not exist. Thus, the subsequent table contains the actual number i:s:: I of terms taken into account in the final least squares formulation.
Together with an arbitrary fitting criterion h(p, z, t, c), we get the parameter estimation problem
min E~=l E:~, E~~, (w7j (hk(P,Z(p,t;,Cj),ti,Cj) - y7j )1'
p E IRn : gj(p) =0, j=l, ... ,me ,
gj(P) 2:0, j=me +1, ... ,mr ,
PI:S::P:S:: pu .
We assume that fitting criteria hk(P,Z,t,c), k = 1, ... , r, state variable z(p,t,c), and constraints gj(p), j = 1, ... , m r , are continuously differentiable functions subject to p.
The state variable z(p, t, c) E IRm is implicitly defined by the solution z of a system
Sl(p,Z,t,C) ° Sm(p,z,t,c) 0
of nonlinear equations, see also Section 3 of Chapter 3. All steady state test problems are listed in Table B.3. Since none of them possesses additional constraints, the corresponding figures mr and me are omitted.

Tabl
e B
.8.
Ste
ady
Sta
te E
quat
ions
narn
e n
I rn
ba
ckgr
v1J.
nd
AB
SO
RP
1
10
7 A
dsor
ptio
n w
ith
surf
ace
com
plex
atio
n B
LO
OD
_S
3 32
B
lood
eth
anol
con
cent
rati
on
CE
NT
RI
3 11
U
ltra
cent
rifu
ge f
or m
olec
ular
wei
ght
dete
rmin
atio
n C
HA
RG
E
4 9
Cha
rge
relu
lati
on m
odel
, ze
ro-p
oten
tial
as
func
tion
of
pH
CH
AR
GE
2 4
9 1
Cha
rge
relu
lati
on m
odel
, ze
ro-p
oten
tial
as
func
tion
of
pH
CH
EM
_EQ
U
2 20
4
Che
mic
al e
quil
ibri
um s
yste
m
CH
EM
ST
AT
2
10
3 O
pti
mal
res
iden
ce t
ime
of a
che
mos
tat
DE
WP
OIN
T
21
3 D
ew p
oint
tem
per
atu
re f
or i
sobu
tano
l an
d w
ater
mix
ture
D
ISS_
EN
Z
2 30
In
hibi
tion
of
diss
ocia
tive
enz
ymes
M
D_E
QU
I 1
6 M
onom
er-d
imer
equ
ilib
rium
M
DT
_EQ
UI
2 6
1 M
onom
er-d
imer
-tet
ram
er e
quil
ibri
mn
ME
TH
AN
E
2 12
2
Par
tial
oxi
dati
on o
f m
etha
ne w
ith
oxyg
en
MU
LT
_CS
T
4 20
8
Fou
r st
age
CS
TR
bat
tery
in
stea
dy-s
tate
N
A_C
ST
R
3 7
2 C
onti
nuou
s-fl
ow s
tirr
ed t
ank
rea
ctor
(st
eady
-sta
te,
norm
aliz
ed)
PE
RIA
5
30
2 P
uls
ar p
robl
em o
f as
tron
omy
RE
CL
IGI
2 33
2
Sat
ura
tio
n c
urve
3H
-com
poun
d on
rec
epto
r m
embr
ane,
one
rec
epto
r an
d o
ne l
igan
d R
EC
LIG
lO
4 10
3
Rec
epto
r-li
gand
bin
ding
stu
dy
R
EC
LIG
ll
2 34
2
Dis
plac
emen
t cu
rve
wit
h on
e re
cept
or,
one
liga
nd
RE
CL
IG12
4
20
3 D
ispl
acem
ent
curv
e w
ith
one
rece
ptor
, tw
o li
gand
s R
EC
LIG
13
4 22
3
Sat
ura
tion
cur
ve
RE
CL
IG14
7
24
4 D
ispl
acem
ent
curv
e of
qui
npir
olc
RE
CL
IG15
7
16
4 M
ass
equi
libr
ium
mod
el w
ith
two
rece
ptor
s an
d t
wo
liga
nds
RE
CL
IG16
4
20
3 M
ass
equi
libr
ium
mod
el w
ith
two
rece
ptor
s an
d o
ne l
igan
d R
EC
LIG
17
2 7
2 M
ass
equi
libr
ium
mod
el w
ith
one
rece
ptor
an
d o
ne l
igan
d R
EC
LIG
18
4 14
3
Mao
s eq
uili
briu
m m
odel
wit
h on
e re
cept
or,
two
liga
nds
RE
CL
IG2
3 27
3
Dis
plac
emen
t cu
rve
of 3
H-c
ompo
und
from
one
rec
epto
r, t
wo
liga
nds
RE
CL
IG3
4 10
3
Sat
ura
tio
n c
urve
, tw
o re
cept
ors
and
one
rad
ioli
gand
ref
data
E
[4
57]
E
E
Ul
Ul
E
[117
] U
5 [4
06],
[279
] U
l [2
41]
U5
[241
] U
5 [2
41]
U5
[173
], [2
79]
U5
[466
] U
5 [4
58],
[79]
U
5 U
l [3
65]
E
[365
], [1
33]
U5
[365
], [1
33]
E
[365
], [1
33]
E
[365
], [1
33]
E
[365
], [1
33]
E
[365
], [1
33]
E
[365
], [1
33]
E
[365
], [1
33]
E
[365
]' [1
33]
E
[365
], [1
33]
E
[365
], [1
33]
E
( con
tinu
ed)
~
'0 ~ ~ ~ ~ ~
>e
>e
Cl ~
11 ~
~
~ ~ " ~ Co
'" h:l
CD
--
'I

na
me
n I
m
back
grou
nd
RE
CL
IG4
6 75
4
Dis
plac
emen
t cu
rve
of a
3H
-com
poun
d w
ith
a su
bsta
nce,
tw
o re
cept
ors
and
liga
nds
ref
data
t-:
> (0
[365
], [1
33]
E
00
RE
CL
IG5
4 11
3
Mas
s eq
uili
briu
m m
odel
wit
h on
e re
cept
or a
nd t
wo
liga
nds
[365
], [1
33]
E
RE
CL
IG6
3 12
3
Dis
plac
emen
t cu
rve
[365
], [1
33]
E
RE
CL
IG7
4 44
3
Dis
plac
emen
t cu
rve
of 3
H-c
ompo
und
from
rec
epto
r [3
65],
[133
] E
R
EC
LIG
8 4
10
3 S
atur
atio
n cu
rve,
tw
o re
cept
ors
and
one
radi
olig
and
[365
], [1
33]
E
RE
CL
IG9
4 22
4
Dis
plac
emen
t cu
rve
wit
h co
ld l
igan
d on
rec
epto
r [3
65],
[133
] E
SS
..RE
AC
4
30
6 S
tead
y st
ate
reac
tion
U
5 S
UL
PH
UR
4
90
3 O
xida
tion
of
sulp
hur
diox
ide
to s
ulph
ur t
riox
id
[139
], [2
79]
U1
TIT
RA
TIO
3
51
5 P
oten
tiom
etri
c ti
trat
ion
of N
,N-d
imet
hyhy
lam
inoe
thyl
amin
e [4
00]
U1
UL
TR
A 1
3
6 1
Ult
race
ntri
fuge
dat
a an
alys
is f
or m
olec
ular
wei
ght
dete
rmin
atio
n fo
r on
e su
bsta
nce
[146
] U
5 U
LT
RA
2 3
6 U
ltra
cent
rifu
ge d
ata
anal
ysis
for
mol
ecul
ar w
eigh
t de
term
inat
ion
of tw
o su
bsta
nces
[1
46]
U5
:.:: ~ ~ '-< ~ t-< §: ~ ~ "":l ~ :.:: Q ~ tl ~ ~ ~ ~ t-<
U:l ~
t;3 ~

APPENDIX B: Appendix B: Test Examples 299
4. Ordinary Differential Equations As before, we proceed from r data sets of the form
where it tinlC values, Ie concentration values and l = ltler corresponding measurernent values are given. Furthermore, we assume that I weights wt are defined. However, some of these weights can become zero in cases when the corresponding measurement value is missing. if artificial data are needed, or if plots are to be generated for state variables for which experimental data do not exist. The subsequent lable contains the actual number f :S I of terms taken into account in the least squares formulation.
The data fitting function h(p, y(p, t, c), t, c) depends on a concentration parameter c and in addition on the solution y(p, t, c) of a system of m coupled ordinary differential equations with initial values
'Ii, Fr (p, y, t, c). Yl (0) = yf(p, c) ,
Jim Fm(p,y,t,c). ym(O) = y.~,(p,c)
'A'ithout loss of generality, we assume that, as in many n,al life situations. the initial time is zero. The initial values of the differential equation system yf(p, c), ", y?JP, c) may depend on one or more of the system parameters to be estimated, and on the concentration parameter c.
The resulting parameter estimation problem can be written in the form
gAp) = 0, j = 1, ... , me
gj(p)?,O. j=m.+l .... ,m,
PI :S P :S pu ,
see Section 4 of Chapter 2 and Section 4 of Chapter ;j for more details. Again we have to assume that Illodel functicllls h,.(p, y, L, c) and gj(p) are continuously differentiable functions of p. k = 1, ... , rand j = 1, ... , mr, and that the solution y(p, t. c) is also a smooth function of p. All test problems based on ordinary differential equations are listed in Table B.4. We do not list additional information about switching points or boundary values, for example.

Tabl
e B.
4. O
rdin
ary
Dif
fere
ntia
l E
quat
ions
eN
C
0
nam
e n
t m
m
e m
e ba
ckgr
o-un
d 're
f da
ta
2BO
DY
2
80
4 0
0 T
wo-
body
pro
blem
[2
09]
U5
2C
ST
R
3 80
4
0 0
Ser
ies
of tw
o C
ST
Rs
wit
h ti
me-
dela
y [3
28],
[279
] U
5 2L
NK
_RO
B
2 40
4
0 0
Tw
o-li
nk p
lan
ar r
obot
wit
hout
con
stra
ints
[8
] U
5 2N
D_O
RD
3
10
2 0
0 A
cade
mic
tes
t pr
oble
m,
ill-
beha
ved
seco
nd o
rder
IV
P
[55]
, [4
35]
U5
2ND
..RA
TE
3
15
1 0
0 S
econ
d or
der
rate
equ
atio
n un
der
hea
t tr
ansf
er c
ondi
tion
s [4
66]
U1
2S
TG
CS
TR
7
5 4
1 0
Tim
e-op
tim
al b
ang-
bang
con
trol
of
two-
stag
e C
ST
R
[279
], [1
18]
non
e A
CT
IVIT
Y
2 9
2 0
0 A
ctiv
itie
s ov
er t
ime
E
AC
TN
ITR
4
80
8 0
0 N
itri
fica
tion
in
acti
vate
d sl
udge
pro
cess
[1
15]
U5
AD
LC
ST
R
52
50
0 30
30
S
tead
y-s
tate
adi
abat
ic C
ST
R w
ith
irre
vers
ible
fir
st o
rder
rea
ctio
n an
d
[229
] E
er
rors
in
vari
able
s A
DIA
BA
TI
2 30
2
0 0
Adi
abat
ic c
ompl
ex g
as-p
hase
rea
ctio
n in
a P
FR
[4
66]
U1
AE
KIN
8
120
3 0
0 A
E-k
inet
ics
Ul
~
AIR
Y
2 38
2
0 0
Air
y eq
uati
on
[432
] U
5 ~
AK
TIV
_W2
8 12
8 4
0 0
Ass
ocia
tion
kin
etic
s, t
wo-
stat
e-th
eory
U
5 ~
AL
PH
A..
PI
5 52
5
0 0
Isom
eriz
atio
n of
an
alp
ha-p
inen
e U
5 ....,
A
MID
PR
O
4 20
1 4
0 0
Am
idpr
oton
rep
lace
men
t w
ith
prot
ein
fold
ing
E
S2 A
MM
ON
AB
3
39
3 0
0 S
tead
y-s
tate
abs
orpt
ion
colu
mn
desi
gn
[213
] U
l t-
,
AM
YL
AS
E
5 50
7
0 0
Alp
ha-a
myl
ase
prod
ucti
on w
ith
baci
llus
sub
tili
s U
5 tJ
~
AN
AE
ME
AS
5
72
7 0
0 A
naer
obic
rea
ctor
act
ivit
y [1
15]
Ul
t;2 A
NH
YD
2
56
3 0
0 O
xida
tion
of
o-xy
lene
to
pht
hali
c an
hydr
ide
[213
] U
l A
NT
IBIO
5
20
2 0
0 K
inet
ics
of a
ntib
ioti
cs i
n li
quid
man
ure
[361
] E
~
AP
PR
X1
5
20
0 0
Cur
ve f
itti
ng
[480
] X
>-J
~ A
PP
RX
2
3 4
1 0
0 C
urve
fit
ting
[4
80]
E
~
ASS
_CV
1 11
57
7
0 0
Ass
ocia
tion
cur
ves
E
CJ
AS
S_C
V2
5 31
2
0 0
Ass
ocia
tion
cur
ves
E
~ A
SS_C
V3
6 27
2
0 0
Ass
ocia
tion
cur
ves
E
tl
ASS
_CV
4 5
53
2 0
0 A
ssoc
iati
on c
urve
s E
~ ~
(con
tinu
ed)
~ S2 ~ Uo ~ ~

na
me
n I
m
rnr
rnf
back
gmun
d re
f da
ta
~
"J
AS
S_C
V5
7 47
3
0 0
Ass
ocia
tion
cu
rves
E
"0
A
SS
_CV
6 6
23
3 0
0 A
ssoc
iati
on c
urv
es
E
t:'t:i
AS
S_C
V7
7 23
2
0 0
Ass
ocia
tion
cu
rves
E
§
AS
S_K
INl
3 15
0
0 A
ssoc
iati
on k
inet
ics
E
~ A
SS
..KIN
2 4
15
0 0
Ass
ocia
tion
kin
etic
s w
ith
exp
onen
tial
ter
m
E
to A
SS
_KIN
3 3
37
0 0
Ass
ocia
tion
kin
etic
s E
~
AS
S_K
IN4
4 11
0
0 A
ssoc
iati
on k
inet
ics
E
'" '" A
SS
_KIN
5 6
16
2 0
0 A
ssoc
iati
on k
inet
ics
E
(t
;:l
AS
TR
O
1 80
4
0 0
Pla
nar
mo
tio
n o
f ea
rth
aro
un
d s
un
(si
ngul
arit
ies)
[8
] U
5 ;l-
: '"' A
SY
MP
3
27
2 0
0 A
sym
pto
tic
bo
un
dar
y v
alue
pro
blem
[8
] U
5 !:tJ
A
XD
ISP
3
80
16
0 0
Dif
fere
ntia
l ex
trac
tio
n c
olum
n w
ith
axi
al d
ispe
rsio
n [2
13]
U5
B_B
LO
CK
10
41
2
0 0
Co
ntr
ol
of b
eta-
bloc
ker,
tw
o co
mp
artm
ents
[8
2]
E
~
B_
BL
OC
KI
20
41
2 0
0 C
on
tro
l of
bet
a-bl
ocke
r, t
wo
com
par
tmen
ts
[82]
E
~
B_B
LO
CK
2 40
41
2
0 0
Con
trol
of
beta
-blo
cker
, tw
o co
mp
artm
ents
[8
2]
E
~ " B
AL
L
5 1
2 5
5 B
Oll
ncin
g ba
ll
[409
] X
~
BA
RN
I 3
22
2 0
0 C
hem
ical
rea
ctio
n, L
otka
-Vol
terr
a eq
uat
ion
[4
44]
E
c;;-B
AR
N2
5
22
2 0
0 C
hem
ical
rea
ctio
n, L
otka
-Vol
terr
a eq
uat
ion
wit
h v
aria
ble
init
ial
valu
es
[444
] E
00
BA
TC
H_C
T
7 2
0 0
Co
ntr
ol
of n
onli
near
bat
ch r
eact
or
[277
] n
one
BA
TC
HD
3
19
1 0
0 D
imen
sion
less
kin
etic
s in
a b
atch
rea
cto
r [2
13]
U5
BA
TC
OM
8
364
4 0
0 B
atch
rea
cto
r w
ith
com
plex
rea
ctio
n se
quen
ce
[213
] U
5 B
AT
EX
2
20
2 0
0 S
ingl
e so
lute
bat
ch e
xtr
acti
on
[2
13]
U5
BA
TF
ER
M
4 12
0 3
0 0
Bat
ch f
erm
enta
tio
n
[115
] U
5 B
AT
SE
G
2 10
2
0 0
Sim
ple
reac
tio
n w
ith
seg
rega
tion
in
a b
atch
rea
cto
r [2
13]
U5
BA
TS
EQ
4
44
4 0
0 C
ompl
ex b
atch
rea
ctio
n se
quen
ce
[213
] U
5 B
EA
D
3 90
6
0 0
Dif
fusi
on a
nd
rea
ctio
n i
n a
sphe
rica
l b
ead
[2
13]
U5
BE
ER
17
62
7
0 0
Bee
r fe
rmen
tati
on
E
B
EL
LM
AN
3
15
1 0
0 C
hem
ical
rea
ctio
n (B
ellm
an)
[457
] E
B
EL
US
OV
3
132
4 0
0 O
scil
lati
ng c
hem
ical
rea
ctio
n, h
ighl
y st
iff
(Bel
usov
-Zha
biti
nsky
) U
5 B
EN
ZE
NE
2
16
2 0
0 P
yro
lyti
c d
ehy
dro
gen
atio
n o
f be
nzen
e to
dip
heny
l E
B
EN
ZH
YD
2
20
2 0
0 Is
oth
erm
al t
ub
ula
r re
acto
r w
ith
tw
o co
nsec
utiv
e re
acti
ons
(deh
ydro
-[2
13]
U5
gena
tion
of
benz
ene)
( con
tinu
ed)
w
0 .....

I ba
ckgr
ound
re
f d
ata
CN
n
am
e
n m
m
r m
e 0
BL
OS
C
2 10
0 2
0 0
Cha
otic
bi-
stab
le o
scil
lato
r [5
1],
[171
] U
1 tv
BIM
OL
EC
U
3 14
1
0 0
Car
cino
-em
bryo
nic
anti
gen
bind
ing,
bim
olec
ular
rev
ersi
ble
reac
tion
[4
] E
BIO~OD
2 30
0 3
0 0
Sub
stra
te p
rodu
ctio
n fr
om b
iom
ass
U5
BIO
DE
G
8 42
3
0 0
Deg
rada
tion
of
two
subs
trat
es a
nd g
row
th o
f bi
omas
s E
B
IOM
AS
S
2 10
2
0 0
Bio
mas
s an
d su
bstr
ate
of f
erm
ento
r U
5 B
IOP
RO
C
4 15
3
0 0
Rec
ombi
nant
mic
robi
olog
ical
pro
cess
[1
19]
U5
BIT
UM
EN
5
27
3 0
0 M
odif
ied
Den
bigh
rea
ctio
n sc
hem
e fo
r co
nver
ting
bit
umen
int
o w
aste
[2
77],
[96]
U
5 B
LO
OD
10
12
4 9
0 0
Blo
od c
oagu
lati
on m
echa
nism
by
thro
mbi
n fo
rmat
ion
[436
] E
B
LO
OD
_O
3 32
1
0 0
Blo
od e
than
ol c
once
ntra
tion
[4
57]
E
BR
UN
HIL
D
6 21
3
0 0
Bol
us i
njec
tion
of
radi
oact
ive
sulf
ate
[400
] E
B
RU
SS
EL
1 4
30
6 0
0 M
ulti
-mol
ecul
ar r
eact
ion
(Bru
ssel
ator
) [2
54]
U5
BR
US
SE
L2
2 80
2
0 0
Mul
ti-m
olec
ular
rea
ctio
n (B
russ
elat
or)
[179
] U
5 B
ST
ILL
4
180
11
50
0 B
inar
y ba
tch
dist
illa
tion
col
umn
(nin
e fl
oors
) [2
13]
U5
BS
TIL
L..I
5
130
13
0 0
Bin
ary
batc
h di
stil
lati
on c
olum
n (e
leve
n fl
oors
) [2
13]
U5
:;;::
BV
P
2 9
2 1
1 B
ound
ary
valu
e pr
oble
m
[8]
U5
~ B
VP
4 8
55
16
8 8
Com
plex
4-t
h or
der
boun
dary
val
ue p
robl
em (
norm
al m
ode
deco
mpo
-U
5 gj
siti
on o
f P
DE
) '-
;
CA
BB
AG
E
8 24
3
0 0
Gro
wth
of
whi
te c
abba
ge (
root
s, s
tem
, le
aves
) [3
61]
E
~ C
AR
GO
11
60
6
3 3
Tra
nsfe
rrin
g co
ntai
ners
fro
m s
hip
to t
ruck
[1
26],
[439
] U
1 t:-<
CA
SC
..IM
P
2 10
11
0
0 A
ir h
umid
ity
in l
abor
ator
y de
vice
U
1 ~
CA
SC
AD
E1
15
9 5
1 1
Sto
rage
cas
cade
of
flow
in
pipe
s, R
icca
ti e
quat
ion
[261
] E
~
CA
SC
AD
E2
3 9
0 0
Flo
w i
n pi
pes
wit
h on
e st
orag
e, R
icca
ti-M
uski
ngum
equ
atio
n [2
61]
E
~ C
AS
CS
EQ
5
30
12
0 0
Cas
cade
of
thre
e re
acto
rs w
ith
sequ
enti
al r
eact
ions
[2
13]
U5
CA
ST
OR
2
88
2 0
0 B
atch
dec
ompo
siti
on o
f ac
etyl
ated
cas
tor
oil
[213
] U
5 '"'I
~
CA
TJI
YD
1
24
2 0
0 C
atal
ytic
hyd
roly
sis
of a
ceti
c an
hydr
ide
[458
] U
5 ~
CA
TA
LY
ST
10
7
0 0
Bif
unct
iona
l cat
alys
t ble
nd o
f met
hyic
ycio
pent
ane
to b
enze
ne in
a t
ubu-
[279
] U
5 la
r re
acto
r ~
CA
V-.
BU
BB
3
9 2
0 0
Cav
itat
ing
bubb
le
[251
] U
5 t:l
C
HA
IND
1
4 40
2
0 0
Fir
st-o
rder
rev
ersi
ble
chai
n re
acti
on
[444
] U
5 ~
CH
AN
-FL
O
3 23
4
2 2
Flo
w o
f a
flui
d du
ring
inj
ecti
on i
nto
a lo
ng c
hann
el
[108
] U
1 ;:,:.
:
(con
tinu
ed)
~ ~ t:-<
Cr.l ~ ~ ~

nam
e n
l m
m
e C
HA
NN
EL
3
9 :3
2 C
HE
M_O
SC
10
50
5
0 C
HE
M_R
EA
17
99
9
0 C
HE
MO
6
184
3 0
CH
EM
OS
TA
3
69
0 0
CIR
CL
E
2 40
4
0 C
IRC
UIT
4
60
:3 0
CL
OU
D
2 50
2
0 C
OA
LI
6 13
2
0 C
OA
L2
11
86
:3 0
CO
AL
3 3
20
0 C
OA
L4
6 21
2
0 C
OA
LS
6
2:3
2 0
CO
AL
6 3
21
1 0
CO
AL
7
18
86
6 0
CO
LG
ON
4
50
11
0 C
OL
LIS
IO
2 40
0 8
0
CO
MM
EN
SA
3
18
7 ()
CO
MP
_E
XP
4
38
2 0
CO
MP
AS
M
3 46
5
0 C
OM
PE
T
4 50
2
()
CO
MP
RE
AC
8
154
7 0
CO
MP
SE
G
2 60
6
()
CO
N_B
UR
G
1 22
2
1 C
ON
C4
7
35
1 0
CO
NC
4A
7
35
3 0
CO
NF
_AL
T
6 23
2
0 C
ON
FL
OI
2 40
0
m"
back
gTO
'und
2
Flo
w i
n a
chan
nel
(3rd
ord
er B
VP
) 0
Che
mic
al o
ocil
lato
r 0
Che
mic
al r
eact
ion
0
Ch
emo
stat
fer
men
tati
on
0
Ste
ady
-sta
te c
hell
lost
at
0 P
aram
eter
ized
cir
cle
equ
atio
n
0 E
lect
ric
circ
uit
in a
cha
otic
reg
ime
() B
ehav
ior
of s
pher
ical
clo
ud o
f ga
s u
nd
er g
rav
itat
ion
0
Coa
l py
roly
sis,
tw
o pa
rall
el C
H4
reac
tion
s 0
Coa
l py
roly
sis,
co
ncu
rren
t re
acti
ons
incl
udin
g C
O,
C0
2,
CH
4, H
2 0
Coa
l py
roly
sis,
fir
st o
rder
H2
reac
tion
0
Coa
l py
roly
sis.
tw
o pa
rall
el C
02
rea
ctio
ns
0 C
oal
pyro
lyoi
o. t
wo
para
llel
CO
rea
ctio
ns
0 C
oal
pyro
lysi
s, h
ighe
r o
rder
CH
4 re
acti
on
0 C
oal
pyro
lysi
s. p
aral
lel,
hig
her
reac
tion
s in
clud
ing
CO
, C
02
, C
H4,
H2
0 E
xtr
acti
on
cas
cade
wit
h b
ackm
ixin
g an
d c
ontr
ol
0 C
olli
oion
dyn
amic
s be
twee
n an
Arg
on a
nd
a N
eon
ato
m i
n t
hei
r m
utu
al
Len
nar
d-J
on
es f
orce
fie
ld
0 T
wo
bac
teri
a w
ith
opp
osit
e o
ub
stra
te p
refe
renc
es
0 T
wo
com
par
tmen
ts w
ith
equ
al a
bso
rpti
on
an
d e
xp
on
enti
al e
lim
inat
ion
()
Co
mp
etit
ive
aosi
mil
atio
n an
d c
omm
ensa
lism
0
Co
mp
etit
ion
of
two
spec
ies
0 C
ompl
ex r
eact
ion
sch
eme
betw
een
form
alde
hyde
an
d s
odiu
m p
ara
phe-
nol
sulp
ho
nat
e 0
Com
plex
rea
ctio
n w
ith
seg
rega
tion
in
a s
emi-
bat
ch r
eact
or
Bur
gers
' eq
uat
ion
wit
h s
tate
an
d b
ou
nd
ary
co
nst
rain
ts
0 C
hem
ical
sim
ulat
ion
mod
el
0 C
hem
ical
sim
ula
tio
n m
odel
, al
tern
ativ
e fo
rmul
atio
n 0
Co
nfo
rmat
ion
alt
erat
ion
s of
pro
tein
s 0
Con
tinu
ous
op
en t
ank
flo
w
ref
data
[8
] U
5 [2
02]'
[401
] U
lO
E
[115
] U
5 [1
15]
U5
U5
[442
] N
O.O
Ol
[94]
U
5 [6
5],
[268
] U
5 [3
75],
[268
] E
[3
75],
[268
] E
[3
75],
[268
] E
[3
75],
[268
] E
[3
75],
[268
] E
[3
75],
[268
] E
[2
13]
U5
[396
] SO
[115
] U
5 [3
44]
U5
[115
] U
5 [5
1],
[3~]
U
5 [2
13]
G5
[213
] U
5 [3
5]
U5
E
E
E
[213
] U
5
(con
tinu
ed)
~
'Cl
'Cl
ttl § >< ~ ~
'tl
'tl '" ;:l [:l..
H
!J:l ~
~ ~ '" ~ 1i;"
>0 w
o w

na
me
n {
m
me
me
back
grou
nd
ref
data
v.o
0
CO
NF
L0
2
2 40
0
0 C
onti
nuou
s cl
osed
iso
ther
mal
tan
k f
low
[2
13]
U5
"'" C
ON
FL
03
2
40
0 0
Con
tinu
ous
clos
ed a
diab
atic
tan
k f
low
[2
13]
U5
CO
NIN
HIB
2
70
2 0
0 C
onti
nuou
s cu
ltur
e w
ith
inhi
bito
ry s
ubst
rate
[1
15]
U5
CO
NS
TIL
L
6 60
10
0
0 C
onti
nnou
s bi
nary
dis
till
atio
n co
lum
n [2
13]
U5
CO
NT
CO
N
3 44
3
0 0
Feed
rat
e co
ntro
l of
inh
ibit
ory
subs
trat
e in
a c
onti
nuou
s cu
ltur
e [1
15]
U5
CO
NT
UN
2
105
4 0
0 C
ontr
olle
r tu
ning
pro
blem
[2
13]
U1
CO
OL
2
48
9 0
0 C
onti
nuou
s st
irre
d-ta
nk c
asca
de
[213
] U
5 C
OO
LC
RI
2 37
4 5
0 0
Coo
ling
cry
stal
liza
tion
(M
iller
and
Par
siva
l fo
rmul
atio
n)
E
CR
_EL
OV
4
36
2 0
0 C
hem
ical
rea
ctio
n E
C
RA
NE
5
18
6 0
0 O
ptim
al c
ontr
ol o
f a
cont
aine
r cr
ane
[372
] U
5 C
S_R
EA
C
2 20
4
0 0
Con
tinu
ousl
y st
irre
d re
acto
r [3
4]
U1
CS
T_l
OR
D
5 40
2
0 0
Fir
st o
rder
con
tinu
ous
stir
red
tan
k w
ith
cool
ing
coil
[466
] U
l C
ST
OH
NE
3
400
3 0
0 C
ompe
diti
on N
H-r
epla
cem
ent
wit
hout
rev
erse
rea
ctio
ns
E
CS
TR
2
60
3 0
0 C
onti
nuou
s st
irre
d-ta
nk c
asca
de
[213
J U
5 ~
CS
TR
_BM
4
76
4 0
0 C
ST
R,
benc
hmar
k ex
ampl
e [3
4]
U5
~ C
ST
R_C
TR
7
1 3
0 0
Con
trol
of
cont
inuo
usly
sti
rred
tan
k r
eact
or
[249
], [2
79J
non
e ~
CS
TR
CO
M
3 85
5
0 0
Isot
herm
al r
eact
or w
ith
com
plex
rea
ctio
n [2
13]
U5
'-<
DC
MD
EG
4
18
20
0 0
Dic
hlor
omet
hane
in
a bi
ofilm
flu
idiz
ed s
and
bed
[115
] U
5 Q
D
EA
CT
3
49
3 0
0 D
eact
ivat
ing
cata
lyst
in
a C
ST
R
[213
] U
5 N
DE
AC
TE
NZ
3
90
7 0
0 R
eact
or c
asca
de w
ith
deac
tiva
ting
enz
yme
[115
] U
5 ~
DE
CA
Y
3 20
3
0 0
Rad
ioac
tive
dec
ay o
f an
iso
tope
U
5 t;2
DE
GE
N
20
2 0
0 N
otor
ious
aca
dem
ic e
xam
ple,
hig
hly
dege
nera
te
[46J
U
5 D
EG
EN
_M
1 40
2
0 0
Mod
ifie
d no
tori
ous
acad
emic
exa
mpl
e, h
ighl
y de
gene
rate
[4
6],
[492
J U
5 ~
DIA
BE
TE
S
6 20
5
0 0
Dia
bete
s m
anag
emen
t E
"-
l ~ D
IAU
XIA
5
100
5 0
0 D
iaux
ic g
row
th o
f a
mic
robe
U
5 ~
DIF
DIS
T
4 36
10
0
0 M
ult
icom
pone
nt d
iffe
rent
ial
dist
illa
tion
[2
13]
Ul
C':l
DIM
ER
4
20
2 0
0 P
harm
akok
inet
ic m
odel
wit
h tw
o su
bsta
nces
and
one
dim
er c
ompl
ex
E
~ D
IOD
E
2 18
2
0 0
Tun
nel-
diod
e os
cill
ator
[2
14J
U5
tl
DIS
LIQ
U
1 14
4 6
0 0
Dis
trib
utio
n of
sub
stra
tes
in a
che
mic
al r
eact
or,
liqu
id p
hase
U
5 ~
DIS
OR
DE
R
3 18
2
0 0
Tre
atin
g m
anic
-dep
ress
ive
diso
rder
wit
h L
ithi
um c
arbo
nate
[4
09J
U5
~
(con
tinu
ed)
~ C") ~
N
Cr:l ~ t;i ~

nam
e n
l T
n
rnT
DIS
PL
MN
T
8 32
3
0 D
ISR
ET
_O
2 12
8 16
0
DIS
SO
C
8 94
1
0 D
MD
S
8 66
4
0 D
RU
G_S
CH
3
32
3 0
DR
UG
DIS
I 2
3 2
0
DR
UG
DIS
2 4
3 2
2
DR
Y_F
RIl
40
4
()
DR
YY
RI2
3
40
4
DR
Y_F
RI3
5
40
4 3
DU
AL
3
48
3 0
DU
CT
3
10
1 0
DY
NA
MO
2
120
3 0
EN
TE
RO
4
27
4 ()
EN
ZC
ON
3
51
3 0
EN
ZS
PL
IT
3 10
2
EN
ZT
UB
E
2 10
1
0 E
NZ
YM
6
28
2 0
EQ
BA
CK
3
50
10
0 E
QE
X
2 15
2
0 E
QM
UL
TI
3 50
1
0
0 E
TH
AN
OL
7
100
4 0
ET
HF
ER
M
8 69
7
0 E
X_B
RE
AK
5
26
2 a
EX
O_R
EA
C
6 15
7 4
0 E
XO
TH
ER
M
2 10
0 2
a
me
back
grvu
nd
0 D
ispl
acem
ent
curv
e 0
Non
-iso
ther
mal
tu
bu
lar
reac
tor
wit
h ax
ial
disp
ersi
on
0 D
isso
ciat
ion
kine
tics
0
Cat
alyt
ic c
onve
rsio
n of
dim
ethy
ldis
ulfi
de
0 O
ptim
al d
rug
sch
edul
ing
for
canc
er c
hem
othe
rapy
0
Tim
e-op
tim
al d
rug
dis
plac
emen
t,
war
fari
n an
d p
heny
lbut
azon
e,
one
jum
p
0 T
ime-
opti
mal
dru
g di
spla
cem
ent,
war
fari
n an
d p
heny
lbut
azon
e, t
hree
ju
mp
s 0
Tw
o-m
ass
osci
llat
or
wit
h dr
y fr
icti
on
betw
een
bodi
es
(im
plic
it
swit
chin
g)
0 T
wo-
mas
s os
cill
ator
wit
h d
ry f
rict
ion
betw
een
bodi
es (
vari
able
sw
itch
-in
g ti
mes
) 0
Tw
o-m
ass
osci
llat
or w
ith
dry
fri
ctio
n be
twee
n bo
dies
(va
riab
le s
wit
ch-
ing
tim
es)
()
Dua
l su
bst
rate
lim
itat
ion
0 D
uct
des
ign
prob
lem
(bo
unda
ry v
alue
pro
blem
) 0
Cha
otic
beh
avio
ur o
f co
uple
d dy
nam
os
0 L
inea
r ph
arm
aco-
kine
tic
mod
el w
ith
lag-
tim
e 0
Con
tinu
ous
enzy
mat
ic r
eact
or
Dif
fusi
on a
nd
rea
ctio
n: s
plit
bo
un
dar
y s
olut
ion
0 T
ubul
ar e
nzym
e re
acto
r 0
Enz
yme
effu
sion
pro
blem
0
Mul
tist
age
extr
acto
r w
ith
back
mix
ing
0 S
impl
e eq
uili
briu
m s
tage
ext
ract
or
0 C
onti
nuou
s eq
uili
briu
m m
ulti
stag
e ex
trac
tion
0
Eth
ano
l fe
d-ba
tch
ferm
enta
tion
by
S. c
ervi
siae
0
Eth
ano
l fe
d b
atch
dia
uxic
fer
men
tati
on
a L
inea
r co
mp
artm
ent
mod
el w
ith
appl
icat
ion
of 2
nd d
ose
0 E
xoth
erm
ic r
eact
ion
wit
h la
g ti
me
0 E
xoth
erm
ic n
-th
ord
er r
eact
ion
in c
lose
d ve
ssel
(no
rmal
ized
)
ref
data
E
[2
13]
U5
E
E
[69J
U
5 [2
79],
[295
J no
ne
[279
], [2
95]
nOll
e
[121
] SO
[121
] SO
[121
] SO
[115
] U
5 [5
0]
U5
[51]
, [3
0J
U1
E
[115
J U
5 [2
13J
Ul
[115
J U
5 [4
57J
E
[213
J U
5 [2
13]
U5
[213
J U
5 [1
43]
U5
[115
] U
5 SO
E
[4
58]
U5
( con
tinu
ed)
"'" ~ § >< l:o "'" ~ (1) ;:l "'- N l:o ~
~ R:l " '" ~ (i) '" eN
o C
!1

na
me
n l
m
m"
me
back
grou
nd
Tef
data
w
0
EX
P-.
lNC
2
60
3 0
0 E
xpon
enti
ally
inc
reas
ing
solu
tion
s [4
92],
[7]
NO
.1
Ol
EX
P_S
IN
2 7
0 0
Exp
onen
tial
-sin
us f
unct
ion
[409
] X
E
XP
_SO
L
2 23
2
0 0
Exp
onen
tial
sol
utio
n [4
32]
U5
FA
ST
4
28
2 0
0 T
est
prob
lem
, fa
st s
tead
y-st
ate
[432
], [2
44]
U5
FB
R
3 45
8
0 0
Flu
idiz
ed b
ed r
ecyc
le r
eact
or
[115
] U
5 F
ED
_BA
T
4 10
2
0 0
Opt
imal
fe
edin
g st
rate
gy
for
mon
od-t
ype
mod
els
by
fed-
batc
h [3
11]
U5
expe
rim
ents
F
ED
_BA
TE
4
10
2 0
0 O
ptim
al f
eedi
ng s
trat
egy
for
mon
od-t
ype
mod
els
by f
ed-b
atch
exp
eri-
[311
] U
5 m
ents
, ti
me-
depe
nden
t fe
ed
FE
DlO
4
80
8 0
0 F
ed-b
atch
rea
ctor
for
pro
tein
pro
duct
ion
by r
ecom
bina
nt b
acte
ria
[252
]' [2
78]
U5
FE
D B
AT
4
180
4 0
0 F
ed b
atch
fer
men
tati
on
[115
] U
5 F
ED
BA
TC
H
25
192
12
0 0
Fed
bat
ch f
erm
enta
tion
pro
cess
of
stre
ptom
y-ce
s te
ndae
E
F
ER
ME
NT
3
56
5 0
0 B
atch
fer
men
tati
on
U5
FE
RM
NT
5
126
9 0
0 F
erm
enta
tion
mod
el w
ith
jum
p i
n in
put
func
tion
U
5 C;:
:
FE
RM
TE
MP
4
100
5 0
0 T
emp
erat
ure
con
trol
of
ferm
enta
tion
[1
15]
U1
~ F
IN
2 8
2 0
0 T
emp
erat
ure
in
a lo
ng f
in
[27]
E
~
FIS
H_P
OP
8
30
3 0
0 F
ish
popu
lati
on o
f la
ke B
aika
l E
.....
F
LU
ID_C
L
2 10
2
Flu
id w
ith
imm
erse
d co
olin
g co
il (B
VP
) [4
66]
U5
S2 F
LU
OR
7
11
6 0
0 F
ast
fluo
resc
ence
rat
e of
pho
tosy
nthe
sis
[10]
E
t-<
FL
UO
RE
S
8 38
39
0
0 F
luor
esce
nce
indu
ctio
n pr
oble
m
[433
] E
~
FL
UO
RE
SC
8
152
39
0 0
Flu
ores
cenc
e in
duct
ion
prob
lem
[4
33]
E
:;2 F
OL
DIN
G 1
7
69
4 0
0 U
nfol
ding
an
d r
efol
ding
of
ribo
nucl
ease
Tl
[327
], [2
97]
E
FO
LD
ING
2 6
72
4 0
0 U
nfol
ding
an
d r
efol
ding
of
ribo
nucl
ease
Tl
[327
], [2
97]
E
:::z
FO
LD
ING
3 5
42
4 0
0 U
nfol
ding
an
d r
efol
ding
of
ribo
nucl
ease
Tl
[327
], [2
97]
E
'-3
~ F
OL
DIN
G4
4 38
3
0 0
Unf
oldi
ng a
nd
ref
oldi
ng o
f ri
bonu
clea
se T
l [3
27],
[297
] E
C;:
: F
OL
DIN
G5
5 38
5
0 0
Unf
oldi
ng a
nd
ref
oldi
ng o
f ri
bonu
clea
se T
l [3
27],
[297
] E
c;"
)
FO
RE
ST
5
40
2 0
0 G
row
th o
f fo
rest
[5
1]
U5
~ F
RA
CT
AK
7
24
2 0
0 O
n-of
f-ki
neti
cs o
f fr
acta
kine
bin
ding
E
tl
F
UN
GI
13
11
0 0
Spr
ead
of f
ungi
in
the
root
sys
tem
s of
gro
win
g pl
ants
[3
69],
[60]
E
~
FU
NG
U
3 11
0
0 S
prea
d of
fun
gi i
n th
e ro
ot s
yste
ms
of g
row
ing
plan
ts
[369
], [6
0]
E
~
( con
tinu
ed)
~ S2 t-<
er., ;;3 ~ ~
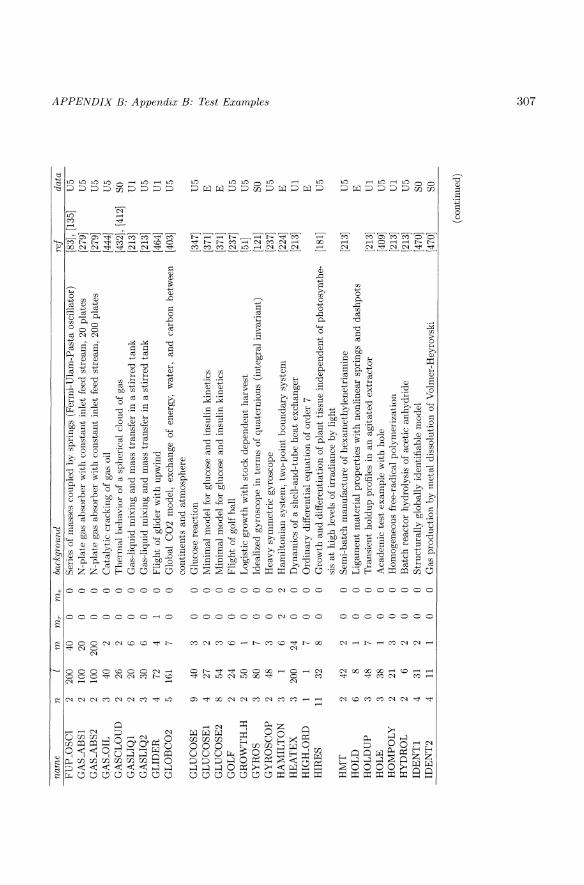
nam
e n
l I'n
n/
"'I·
FU
PD
SC
I 2
200
40
0 G
AS
_AB
S1
2 10
0 20
0
GAS~BS2
2 10
0 20
0 0
GA
S_O
IL
;~
40
2 0
GA
SC
LO
UD
2
26
2 0
GA
SL
IQ1
2 20
6
0 G
AS
LIQ
2 3
30
6 0
GL
IDE
R
4 72
4
1 G
LO
BC
02
5
161
7 0
GL
UC
OS
E
9 40
3
0 G
LU
CO
SE
1 4
27
2 0
GL
UC
OS
E2
8 54
3
0 G
OL
F
2 24
6
0 G
RO
WT
H_H
2
50
1 0
GY
RO
S
:~ 80
7
0 G
YR
OS
CO
P
2 48
3
0 H
AM
ILT
ON
3
1 6
2 H
EA
TE
X
3 20
0 24
0
HIG
H_O
RD
7
0 H
IRE
S
11
32
8 0
HM
T
2 42
2
0 H
OL
D
6 8
1 0
HO
LD
UP
:1
48
7 0
HO
LE
3
38
0 H
OM
PO
LY
2
21
3 0
HY
DR
OL
2
6 2
0 ID
EN
T1
4 31
2
0 ID
EN
T2
4
11
] 0
me
bad:
grv'
Und
()
S
erie
s of
mas
ses
coup
led
by s
prin
gs (
Fer
mi-
Ula
m-P
asta
osc
illa
tor)
0
N-p
late
gas
abs
orbe
r w
ith
cons
tant
inl
et f
eed
stre
am,
20 p
late
s 0
N-p
latt
' gas
abs
orbe
r w
ith
cons
tant
inl
et f
eed
stre
am,
200
plat
es
0 C
atal
ytic
cra
ckin
g of
gas
oil
0 T
her
mal
beh
avio
r of
a s
pher
ical
clo
ud o
f ga
s 0
Gas
-liq
uid
mix
ing
and
mas
s tr
ansf
er i
n a
stir
red
tan
k
0 G
as-l
iqui
d m
ixin
g an
d m
ass
tran
sfer
in
a st
irre
d ta
nk
0
Fli
ght
of g
lide
r w
ith
upw
ind
0 G
loba
l C
02
mod
el,
exch
ange
of
ener
gy.
wat
er,
and
car
bon
betw
een
cont
inen
ts a
nd
atm
osph
ere
0 G
luco
se r
eact
ion
0 M
inim
al m
odel
for
glu
cose
an
d i
nsul
in k
inet
ics
() M
inim
al m
odel
for
glu
cose
an
d i
nsul
in k
inet
ics
0 F
ligh
t of
gol
f ba
ll
0 L
ogis
tic
grow
th w
ith
stoc
k de
pend
ent
harv
est
0 Id
eali
zed
gyro
scop
e in
ter
ms
of q
uate
rnio
ns (
inte
gral
inv
aria
nt)
0 H
eavy
sym
met
ric
gyro
scop
e 2
Ham
ilto
nian
sys
tem
, tw
o-po
int
bo
un
dar
y s
yste
m
()
Dyn
amic
s of
a s
hell
-and
-tub
e h
eat
exch
ange
r 0
Ord
inar
y di
ffer
enti
al e
quat
ion
of o
rder
7
0 G
row
th a
nd
dif
fere
ntia
tion
of
plan
t ti
ssue
ind
epen
dent
of
phot
osyn
the-
sis
at h
igh
leve
ls o
f ir
radi
ance
by
ligh
t 0
Sem
i-ba
tch
man
ufac
ture
of
hexa
mct
hyle
netr
iam
ine
0 L
igam
ent
mat
eria
l pr
oper
ties
wit
h no
nlin
ear
spri
ngs
and
das
hpot
s 0
Tra
nsie
nt h
oldu
p pr
ofil
es i
n an
agi
tate
d ex
trac
tor
0 A
cade
mic
tes
t ex
ampl
e w
ith
hole
0
Hom
ogen
eous
fre
e-ra
dica
l po
lym
eriz
atio
n 0
Bat
ch r
eact
or h
ydro
lysi
s of
ace
tic
anhy
drid
e 0
Str
uctu
rall
y gl
obal
ly i
dent
ifia
ble
mod
el
0 G
as p
rodu
ctio
n by
met
al d
isso
luti
on o
f V
olm
er-H
eyro
vski
ref
da
ta
[83]
, [1
35]
U5
[279
] U
5 [2
79]
U5
[444
J U
5 [4
32]'
[412
] SO
[2
13]
U1
[213
J U
5 [4
64J
U1
[403
] U
5
[347
] U
5 [3
71]
E
[371
] E
[2
37J
U5
[51]
U
5 [1
21J
SO
[237
] U
5 [2
24]
E
[213
] U
1 E
[1
81]
U5
[213
] U
5 E
[2
13]
U1
[409
] U
5 [2
13]
U1
[213
] U
5 [4
70]
SO
[470
] SO
( con
tinu
ed)
;:.. ~ t:>l ~ >< ~ ~ '" '" (1
)
;:l R. N
~ ~
~ ~ i;
l ~ " Co
eN
o --.j

! ba
ckgr
ound
re
f da
ta
~
nam
e n
ID
IDr
IDe
a IM
PU
LS
E
3 20
2
0 0
Impu
lse
of n
erve
pot
enti
al
[405
] U
5 0
0
INC
_ST
IF
2 14
2
0 0
Cla
ss o
f te
st p
robl
ems
wit
h in
crea
sing
stif
fnes
s [2
28]
U5
INH
IB
3 39
4
0 0
Gas
and
liq
uid
oxyg
en d
ynam
ics
in a
con
tinu
ous
ferm
ente
r [1
15]
U5
INT
ER
LE
U
16
63
28
0 0
Inte
rleu
kin-
13 b
indi
ng k
inet
ics
[242
] E
IR
B64
00
9 6
6 0
0 O
ptim
al c
ontr
ol m
odel
for
the
ind
ustr
ial
robo
t IR
B64
00
[196
] no
ne
ISO
_2PH
A
3 40
4
0 0
Van
-de-
Vus
se
reac
tion
in
is
othe
rm,
idea
lly
mix
ed
CS
TR
wit
h tw
o U
5 ph
ases
IS
O.J
3AT
4
15
4 0
0 Id
eal
isot
herm
al b
atch
rea
ctor
[1
17]
U5
ISO
ME
R
5 40
5
0 0
The
rmal
iso
mer
izat
ion
of a
lpha
-pin
ene
to d
ipen
tene
[4
44],
[52]
, [4
00]
E
ISO
TO
P1
15
108
9 0
0 Is
otop
e di
luti
on w
ith
nine
com
part
men
ts
E
ISO
TO
P2
28
108
9 7
7 Is
otop
e di
luti
on w
ith
nine
com
part
men
ts
E
JFIT
7
24
1 0
0 C
hem
ical
rea
ctio
n E
K
AT
AL
Y1
13
49
9 0
0 T
est
reac
tion
for
cat
alys
ts
E
KA
TA
LY
2 19
19
2 12
0
0 T
est
reac
tion
for
cat
alys
ts
E
=<:
KE
PL
ER
2
48
4 0
0 M
odif
ied
Kep
ler
prob
lem
[8
], [3
73],
[180
] U
5 ~
KE
TT
383F
8
94
1 0
0 D
isso
ciat
ion
kine
tics
E
~
KID
NE
Y
4 20
0 5
0 0
Cla
ss o
f st
iff
test
pro
blem
s [3
97]
U5
.., K
IN_P
RO
7
130
10
0 0
Kin
etic
che
mic
al p
roce
ss
E
52 K
LA
DY
N
3 80
4
0 0
Dyn
amic
mod
el f
or K
La
[213
] U
5 t:-<
KN
EE
1
9 0
0 K
nee
prob
lem
[9
1]
U5
~ L
AS
ER
3
36
6 0
0 A
mpl
ify
elec
tro-
mag
neti
c ra
diat
ion
by s
tim
ulat
ed e
mis
sion
[3
3]
U5
~ L
EG
..PO
L
2 18
2
0 0
Leg
endr
e po
lyno
mia
l of
ord
er 2
[4
32]
X
LE
PS
3
600
6 0
0 L
EP
S-c
onto
ur o
f m
olec
ule
D-C
-H
[396
] U
5 ~
LIN
J3Y
S 1
210
15
0 0
Sys
tem
of
line
ar O
DE
's
[377
] U
5 '""
I ~
LIN
EW
EA
V
2 15
1
0 0
Lin
ewea
ver-
Bur
k pl
ot
[115
] U
5 ~
LIS
A
5 6
7 0
0 L
ow t
hrus
t or
bita
l tr
ansf
er o
f a
LIS
A s
pace
craf
t [4
59]
E
~
LK
IN
3 26
2
0 0
Sim
ple
line
ar c
ompa
rtm
ent
mod
el
E
~ L
KIN
.J3R
2
34
2 0
0 Si
mpl
e li
near
com
part
men
t m
odel
wit
h tw
o br
eak
poin
ts
U5
t:::l
LK
IN_L
A
3 34
2
0 0
Sim
ple
line
ar c
ompa
rtm
ent
mod
el w
ith
vari
able
lag
tim
e U
5 ~
LK
IN_N
UM
3
26
8 0
0 Si
mpl
e li
near
com
part
men
t m
odel
, ex
plic
it n
umer
ical
der
ivat
ives
E
~
(con
tinu
ed)
~ 52 t:-<
Cr.l ~ ~ ~

na
me
n I
m
me
LK
IN_0
3 2
78
2 0
LK
IN_R
E
3 26
2
21
LK
IN_S
3
26
8 0
LK
IN_T
3
26
2 0
LO
G_G
RO
W
2 50
1
0 L
OR
EN
Z
6 16
3
0 L
OR
EN
Z_S
3
240
3 0
LO
T_V
OL
1
3 20
0 2
0 L
OL
VO
L2
4
20
2 0
MA
RIN
E
16
160
8 0
MC
ST
ILL
7
100
20
0 M
EC
H_S
YS
6
230
4 0
ME
MIN
H
3 70
3
0 M
EM
SE
P
2 36
6
0 M
ET
_SU
RF
6
46
2 0
ME
TH
AN
6
48
3 0
ME
TH
YL
2
30
2 0
MIC
_GR
OW
4
200
3 0
MIL
K
6 45
3
0 M
INW
OR
LD
4
117
3 0
MIX
-RA
T1
3 7
1 0
MIX
-RA
T2
3 11
0
MIX
-RA
T3
6 11
1
0 M
IXP
OP
2
180
3 0
MM
..ME
TA
1 2
80
4 0
MM
..ME
TA
2 2
80
4 0
MM
KIN
ET
4
22
3 0
MO
IST
UR
E
4 6
3 0
MO
ON
10
0
me
back
grou
nd
0 S
impl
e li
near
co
mp
artm
ent
mod
el w
ith
th
ree
dose
s 0
Sim
ple
line
ar c
om
par
tmen
t m
odel
, dy
nam
ic c
onst
rain
ts
0 S
impl
e li
near
com
part
men
t m
odel
wit
h s
ensi
tivi
ty e
quat
ions
0
Sim
ple
line
ar c
ompa
rtm
ent
mod
el (
OD
E),
app
roxi
mat
ion
erro
r 0
Log
isti
c gr
owth
wit
h co
nsta
nt h
arve
st
0 L
oren
z eq
uati
on
0 L
oren
z eq
uati
on,
high
ly o
scil
lati
ng
0 L
otka
-Vol
terr
a di
ffer
enti
al e
quat
ion
0 L
otka
-Vol
terr
a di
ffer
enti
al e
quat
ion
0 M
arin
e po
pula
tion
0
Con
tinu
ous
mul
tico
mpo
nent
dis
till
atio
n co
lum
n 0
Mec
hani
cal
osci
llat
ing
syst
em w
ith
elas
tici
ty,
slac
k, a
nd
dam
pin
g
0 C
ell
rete
ntio
n m
embr
ane
reac
tor
0 G
as s
epar
atio
n by
mem
bran
e pe
rmea
tion
0
Met
allo
id s
urfa
ce
0 C
onve
rsio
n of
met
hano
l to
var
ious
hyd
roca
rbon
s 0
Th
erm
al e
xplo
sion
of
met
hyl
nit
rate
(no
rmal
ized
) 0
Fed
-bat
ch
bior
eact
or
wit
h on
e gr
owin
g bi
omas
s on
on
e li
mit
ing
sub
stra
te
0 M
asti
tis
wit
h d
iape
desi
s of
neu
trop
hil
0 M
ini-
wor
ld w
ith
popu
lati
on,
cons
umpt
ion,
an
d e
nvir
onm
enta
l pol
luti
on
0 M
ixed
rat
e m
odel
, ch
emic
al r
eact
ion
0 M
ixed
rat
e m
odel
, ch
emic
al r
eact
ion
0 M
ixed
rat
e m
odel
, ch
emic
al r
eact
ion
(cub
ic f
it fo
r Q
dO)
0 P
red
ato
r-p
rey
pop
ulat
ion
dyna
mic
s 0
Met
abol
ic p
roce
ss i
n ur
ine
and
pla
sma,
Mic
hael
is-M
ente
n ki
neti
cs
0 M
etab
olic
pro
cess
in
urin
e an
d p
lasm
a, M
icha
elis
-Men
ten
kine
tics
0
Kin
etic
s of
enz
yme
acti
on
0 M
oist
ure
of g
ranu
late
s 0
One
-dim
ensi
onal
ear
th-m
oon-
spac
eshi
p pr
oble
m
ref
data
U
5 E
E
E
[5
1]'
[274
] U
5 U
5 [2
04]
U5
[204
] U
5 [4
44]
U5
[108
] E
[2
13]
U1
E
[115
] U
5 [2
13]
U5
E
[288
] E
[4
58]
U5
[17]
U
5
E
[51]
, [2
98]
U5
E
E
E
[115
] U
1 [2
24]
SO
[224
] SO
[1
15]
U5
E
[315
] U
5
(con
tinu
ed)
;".. ~ ~ ~ ~
;".. :g (1)
~ "'- 11"
~
::;;'l ~ ~ ., ~ '" '" w
o (0

na
me
n I
m
m,
m,
back
grou
nd
ref
data
eN
>
-
MO
T_T
SP
9
40
4 3
3 O
ptim
al c
ontr
ol o
f m
otor
ized
tra
veli
ng s
ales
man
pro
blem
[3
72J
UI
0
MO
TIO
N
3 62
4
0 0
Mot
ion
of a
car
in
a ar
ena
[8J
U5
MU
BA
TC
H
4 30
8
0 0
Mul
tico
mpo
nent
bat
ch d
isti
llat
ion
[213
J U
5 M
UL
TIL
AY
13
23
7
Mul
tila
yer
mod
el f
or a
dsor
ptio
n/de
sorp
tion
of m
olec
ules
ont
o a
met
alli
c E
su
rfac
e M
US
CL
E
5 32
0 3
0 0
Ca2
+ r
elea
se i
n sk
elet
al m
uscl
e ce
lls
[204
J U
5 M
YL
_ES
TR
10
32
4
0 0
Met
hyl
este
r hy
drog
enat
ion
[29J
, [2
79J
E
NIT
RIF
4
45
4 0
0 B
atch
nit
rifi
cati
on w
ith
oxyg
en t
rans
fer
[115
J U
5 N
ITR
O
3 60
2
0 0
Con
vers
ion
of n
itro
benz
ene
to a
nili
ne
[213
J U
1 N
ITR
OG
EN
3
14
1 0
0 R
ever
sibl
e ho
mog
eneo
us g
as-p
hase
rea
ctio
n of
nit
roge
n ox
ide
[444
J E
N
L_C
ST
R
10
160
8 0
0 N
onli
near
iso
ther
mal
CS
TR
for
pho
toch
emic
al r
eact
ion
[49]
, [1
3J
U5
NL
IN_V
Il
29
248
10
0 0
Non
line
ar-v
isco
elas
tic
mat
eria
l la
w i
n fr
eque
ncy
dom
ain
E
NL
IN_V
I2
29
500
10
9 0
N on
line
ar-v
isco
elas
tic
mat
eria
l la
w
in
freq
uenc
y do
mai
n w
ith
E
cons
trai
nts
~
c:::
NO
N_D
IFF
3
26
2 0
0 S
impl
e li
near
com
part
men
t m
odel
, no
n-co
ntin
uous
RH
S
SO
~ N
ON
_ISO
2
20
2 0
0 N
on-i
soth
erm
al r
eact
or w
ith
tim
e-de
pend
ent
reac
tant
and
tem
pera
ture
U
5 ~
NO
NJ<
IN
6 30
2
0 0
Non
line
ar p
harm
acok
inct
ic r
eact
ion
U5
....,
NO
ST
R
2 74
3
0 0
Non
-ide
al s
tirr
ed-t
ank
reac
tor
[213
J U
5 S2
NT
AI
9 38
3
0 0
C.
hein
tzii
gro
wn
on g
luco
se s
wit
ched
to
nit
rilo
-tri
acet
ic a
cid
E
~
NT
A2
10
38
3
0 0
C.
hein
tzii
gro
wn
on g
luco
se s
wit
ched
to
nit
rilo
-tri
acet
ic a
cid
E
b ::c.
NU
TR
ITI
4 40
4
0 0
Nut
riti
ve c
ycle
wit
h tw
o co
mpe
ting
pla
nt p
opul
atio
ns
[51J
U
I ~
OB
SE
RV
I 2
11
2 0
0 L
inea
r ob
serv
er i
n no
rmal
for
m
U5
OB
SE
RV
2 2
48
4 0
0 L
inea
r ob
serv
er
U5
~ O
C-.
EX
3 6
30
2 0
0 O
ptim
al c
ontr
ol t
est
prob
lem
[1
26],
[314
J no
ne
>-'J ~
OC
_EX
4 1
50
2 0
0 O
ptim
al c
ontr
ol t
est
prob
lem
(ba
ng-b
ang
solu
tion
) [1
26],
[314
J no
ne
~
OE
KO
SY
S
8 60
3
0 0
Eco
logi
cal
syst
em w
ith
two
trop
hic
laye
rs
[267
J U
5 C':
l O
IL
4 40
6
0 0
Oil
shal
e py
roly
sis
[478
], [2
79J
Ul
~ O
LIG
O
4 84
4
0 0
Oli
gosa
ccha
ride
pro
duct
ion
in e
nzym
atic
lac
tose
hyd
roly
sis
[115
J U
5 b
ON
_OF
F1
7 8
2 1
0 O
n-of
f ki
neti
cs w
ith
two
lag
tim
es
E
~ O
KO
FF
2
8 31
2
0 0
On-
off
kine
tics
E
::c.
(con
tinu
ed)
~ S2 ~ CJ)
;:] t;3 ~

'nam
e n
I m
17~r
ON
_OF
F3
10
35
3 0
ON
_OF
F4
10
67
4 0
ON
_OF
F5
6 3"
Q
2
II O
N_O
FF
6 10
27
3
0 O
ND
FF
7
8 30
2
0 O
PT
_CO
NT
4
29
3 2
OP
T_
CT
RL
21
1
5 4
OP
T_K
IN
6 60
2
2 O
RB
JvIO
TN
3
40
4 0
OR
BIT
9
14
3 0
OR
EG
O
3 24
3
0 O
SC
_RE
AC
3
25
3 0
OS
C_T
RA
N
5 86
2
0 O
SC
2IN
TM
:l
:364
4
0 O
SC
IL
3 15
0 3
0 O
SC
ILL
5
115
6 0
OX
DY
N
2 29
3
0 O
XE
NZ
2
24
3 0
OX
IDA
T
3 40
:3
0 O
ZO
NE
2
30
2 0
PA
RT
ICL
E
2 2
4 2
PC
B
17
90
9 0
PE
AK
S
3 10
2 3
0 P
EN
D_E
LA
1
20
4 0
PE
NIC
ILL
4
40
4 0
PE
ST
ICID
4
20
4 0
PH
A_D
YN
l 9
35
3 0
PH
AJ)
YN
2
19
35
3 0
PH
A_D
YN
3 4
35
3 0
PH
A_D
YN
4 5
35
3 ()
'(rt
f'
back
grou
nd
0 O
n-of
f ki
neti
cs b
indi
ng a
trop
in-c
hase
0
On-
off
kine
tics
bin
ding
atr
opin
-cha
se
0 O
n-of
f ki
neti
cs b
indi
ng a
trop
in-c
hase
()
O
n-of
f ki
neti
cs b
indi
ng a
trop
in-c
hase
II
On-
off
kine
tics
bin
ding
atr
opin
-cha
se
0 O
ptim
al c
ontr
ol p
robl
em w
ith
2nd
orde
r st
ate
cons
trai
nts
4 O
ptim
al c
ontr
ol w
ith
four
fin
al s
tate
s 0
Opt
imal
ado
ptio
n of
init
ial
infu
sion
an
d d
oses
at
give
n th
erap
euti
c le
vel
0 S
impl
e or
bit
mot
ion
0 M
inim
um t
ime
orbi
t tr
ansf
er (
opti
mal
con
trol
) 0
Bel
usov
-Zha
boti
nski
i re
acti
on (
oreg
onat
or)
0 C
hem
ical
osc
illa
tion
0
Osc
illa
ting
sys
tem
wit
h tr
ansi
ent
infl
uenc
es
0 O
scil
lati
on o
f th
e co
ncen
trat
ion
of tw
o in
term
edia
tes
0 O
scil
lati
ng t
ank
rea
ctor
beh
avio
r 0
Osc
illa
tion
s in
a h
eter
ogen
eous
cat
alyt
ic r
eact
ion
0 O
xyge
n up
take
an
d a
erat
ion
dyna
mic
s 0
Aer
atio
n of
a t
ank
rea
ctor
for
enz
ymat
ic o
xida
tion
0
Oxi
dati
on r
eact
ion
in a
n a
erat
ed t
ank
II
Ozo
n ki
neti
cs i
n at
mos
pher
e 2
Par
ticl
e di
ffus
ion
and
rea
ctio
n (2
nd o
rder
BV
P)
0 K
inet
ic a
naly
sis
of c
atal
ytic
hyd
roge
niza
tion
of
PC
B
0 S
tiff
OD
E w
ith
shar
p pe
aks
0 E
last
ic p
endu
lum
0
Fed
-bat
ch f
erm
ento
r fo
r bi
osyn
thes
is o
f pe
nici
llin
0
Pes
tici
de d
egra
dati
on w
ith
expl
icit
mic
robi
al p
opul
atio
n dy
nam
ics
0 P
harm
aco-
dyna
mic
mod
el w
ith
vari
able
ind
ivid
ual
init
ial
lag-
tim
es
0 P
harm
aco-
dyna
mic
mod
el w
ith
vari
able
ini
tial
val
ues,
ini
tial
tim
e 0
0 P
harm
aco-
dyna
mic
mod
el w
ith
one
fixe
d in
itia
l tim
e fo
r al
l exp
erim
ents
0
Pha
rmac
o-dy
nam
ic m
odel
wit
h on
e va
riab
le i
niti
al l
ag-t
ime
r4
da
ta
E
E
E
E
E
[464
], [5
4]
U5
[81]
, [2
77]
non
e E
[3
77]
U5
[126
] no
ne
[181
]' [1
30]
E
U5
E
[165
] U
5 [2
13]
U5
Ul
[115
] U
5 [l
l5]
U1
[213
J U
5 [4
09J
U5
[8J
X
E
[163
J U
5 [2
71],
[121
J SO
[2
78],
[90J
U
5 [3
60],
[332
J E
E
E
E
E
(con
tinu
ed)
~ ~ l"l § >:;; to ~ "" "" '" ~ '" to ~
~ ~ ~ ! '" Co
eN
>-'
>
-'

na
me
n I
m
me
me
back
grou
nd
ref
data
w
>
-'
PHA
_DY
N5
7 61
3
0 0
Pha
rmac
o-dy
nam
ic r
eact
ion
wit
h la
g ti
me,
IO
-0.
01
E
~
PH
A.D
YN
6 7
61
3 0
0 P
harm
aco-
dyna
mic
rea
ctio
n w
ith
lag
tim
e, I
O =
0.1
E
PH
A...
DY
N7
7 61
3
0 0
Pha
rmac
o-dy
nam
ic r
eact
ion
wit
h la
g ti
me,
IO
= 1
E
PH
A_K
IN1
6 11
3
3 2
Lin
ear
phar
mac
o-ki
neti
c m
odel
wit
h bo
lus
adm
inis
trat
ion
[197
] U
5 PHA~IN2
9 52
7
1 L
inea
r ph
arm
aco-
kine
tic
mod
el w
ith
3 se
gmen
t ab
sorb
atio
ns,
sing
le
[197
] U
5 do
se
PH
A-R
EA
C
5 18
0 2
0 0
Pha
rmac
o-dy
nam
ic r
eact
ion
E
PH
AR
MA
9
52
5 0
0 L
inea
r co
mpa
rtm
enta
l ph
arm
acol
ogic
al m
odel
E
P
HB
4
60
3 0
0 S
truc
ture
d m
odel
for
PH
B p
rodu
ctio
n [1
15]
U5
PH
OS
_TR
A
26
58
8 0
0 R
ever
sibl
e re
acti
ons
of p
hosp
hotr
ansf
er s
yste
m
E
PHO
SPH
...D
2
75
3 0
0 C
hem
ical
rea
ctio
n, p
hosp
hore
scen
ce
U5
PH
OT
O
11
38
39
0 0
Pho
tosy
nthe
sis
proc
ess
[367
], [4
33]
E
PH
OT
OJ>
R
2 24
1
0 0
Dai
ly p
hoto
prod
ucti
on o
f pl
ants
[5
1]
U5
PH
OT
O_S
11
31
39
0
0 P
hoto
synt
hesi
s pr
oces
s [3
67],
[433
] SO
~
PLA
NT
...E
X
8 34
2
0 0
Pla
nt g
row
th (
rese
t of
init
ial
valu
es)
E
~ P
LA
NT
_GR
8
36
2 0
0 P
lan
t gr
owth
(re
set
of in
itia
l va
lues
) U
5 ~
PL
AS
MID
2
200
5 0
0 S
tabi
lity
of
reco
mbi
nant
mic
roor
gani
sms
[115
] U
5 ....
PL
UG
-FL
O
3 20
2
0 0
Plug
-flo
w t
ubul
ar r
eact
or
[69]
U
1 f2
PO
LY
I 14
17
5
0 0
Pol
ymer
izat
ion
E
t-<
PO
LY
2 8
13
4 0
0 P
olym
eriz
atio
n E
~
PO
LY
BU
5
68
5 0
0 P
olym
eriz
atio
n of
hig
h ci
s po
lybu
tadi
ene
in h
exan
e us
ing
cata
lyst
U
5 ~
PO
LY
ME
R
3 7
2 0
0 P
olym
eriz
atio
n E
P
OP
UL
10
83
10
1
1 P
opul
atio
n co
unts
U
5 ~
PR
OT
EIN
4
60
5 0
0 P
rodu
ctio
n of
sec
rete
d he
tero
logo
us p
rote
in i
n fe
d-ba
tch
reac
tor
by a
[3
35],
[13]
U
5 "3
~ ye
ast
stra
in
'<:
PR
OT
OZ
OA
3
21
1 0
0 L
ogis
tic
grow
th m
odel
of
prot
ozoa
U
5 C
i P
YR
lDlN
10
66
7
0 0
Den
itro
geni
zati
on o
f py
ridi
n [4
5]
E
~ R
AB
BIT
3
80
2 0
0 R
abbi
ts e
at g
rass
on
an i
slan
d U
5 b
RA
MP
5
62
1 0
0 L
igam
ent
mat
eria
l pr
oper
ties
wit
h no
nlin
ear
spri
ngs
and
dash
pots
E
~
RA
TE
...M
OD
6
36
3 0
0 C
atal
ytic
hyd
rode
sulf
uriz
atio
n of
sul
fur
mol
ecul
es (
DB
T)
E
;:,.:
(con
tinu
ed)
~ f2 t-<
Cr.l ;'3 ~ ~

na
me
n l
m
mr
RA
TS
OL
1 3
20
2 0
RA
TS
OL
2 2
20
2 0
RE
-EN
TR
Y
7 6
6 0
RE
AC
3
40
10
0 R
EA
C_C
TR
7
2 20
RE
AC
ME
CH
5
64
5 0
RE
AC
TIO
N
6 12
5
0 R
EF
RlG
2
10
2 0
RE
G-R
ES
4
100
2 0
RE
LA
Y
2 50
2
0 R
EP
FE
D
5 40
3
0 R
EP
LC
UL
5
14
2 0
RE
S_T
IME
4
0
RE
VT
EM
P
2 48
4
0 R
EX
T
2 82
5
0 R
OB
-.A
RM
3
20
4 0
RO
B_C
TR
L
5 3
4 5
RO
BE
RT
3
33
3 0
RO
BO
T
8 10
2 6
0 R
OD
C
2 10
2
0 R
OE
SS
LE
R
3 21
3
0 R
T-.
PUL
SE
7 1
3 0
RU
N
1 24
4
0 S
AT
-EX
P
6 33
3
0 S
E
2 29
1
0 S
EM
IPA
R
2 15
5
0 S
EM
ISE
G
3 30
3
0 S
EM
ISE
Q
2 30
5
0
me
back
grou
nd
0 E
xist
ence
of
rati
onal
sol
utio
n 0
Exi
sten
ce o
f ra
tion
al s
olut
ion
0 A
poll
o re
-ent
ry p
robl
em
0 C
hem
ical
rea
ctio
n 0
Con
trol
of
fi
rst-
orde
r re
vers
ible
ch
emic
al
reac
tion
w
ith
dy
nam
ic
cons
trai
nts
0 R
eact
ion
mec
hani
sm w
ith
stif
f di
ffer
enti
al e
quat
ion
0 C
hem
ical
rea
ctio
n 0
Aut
o-re
frig
erat
ed r
eact
or
0 D
ynam
ics
of a
pop
ulat
ion
depe
ndin
g on
a r
egen
erat
ive
reso
urce
0
Sim
ple
disc
onti
nuou
s m
odel
wit
h a
rela
y 0
Rep
eate
d fe
d ba
tch
cult
ure
0 R
epea
ted
med
ium
rep
lace
men
t cu
ltur
e 0
Opt
imal
res
iden
ce t
ime
for
max
imum
yie
ld i
n an
idea
l is
othe
rmal
bat
ch
reac
tor
0 R
ever
sibl
e re
acti
on w
ith
vari
able
hea
t ca
paci
ties
0
Rea
ctio
n w
ith
inte
grat
ed e
xtra
ctio
n of
inhi
bito
ry p
rodu
ct
0 R
obot
arm
wit
h tw
o li
nks
2 T
ime-
opti
mal
con
trol
of
two-
link
rob
otic
arm
0
Rob
erts
on's
dif
fere
ntia
l eq
uati
on f
or r
eact
ion
rate
s 0
Mov
e eq
uati
ons
of a
rob
ot (
Man
utec
r3)
0
Rad
iati
on f
rom
met
al r
od
0 R
oess
ler
diff
eren
tial
equ
atio
n 0
Rec
tang
ular
pul
se i
n ri
ght-
hand
sid
e 0
Rel
ief
on a
run
away
pol
ymer
izat
ion
reac
tion
0
Sat
urat
ion
expe
rim
ent
in p
harm
aceu
tics
0
Sing
le c
hem
ical
rea
ctio
n 0
Par
alle
l re
acti
ons
in a
sem
i-co
ntin
uous
rea
ctor
0
Sim
ple
reac
tion
wit
h se
greg
atio
n in
a s
emi-
batc
h re
acto
r 0
Seq
uent
ial
reac
tion
s in
a s
emi-
cont
inuo
us r
eact
or
ref
data
[1
60]
U5
[160
] U
5 [4
35]
E
U5
[233
]' [2
77]
non
e
[396
] U
5 E
[2
13]
U5
[51]
, [1
61]
U5
[410
] U
l [1
15]
U5
[115
] U
5 [1
17]
E
[213
] U
5 [2
13]
U1
[326
] E
[4
76],
[279
] no
ne
[363
] U
5 [3
31]
U5
[213
] U
5 U
5 [4
41],
[279
] n
one
[213
] U
l E
E
[2
13]
U5
[213
] U
5 [2
13]
U5
(con
tinu
ed)
~ ~ ~ ~ !=:
l ~
:g '" ;:l "- fl"
!=:l ~ '" <"
"i- ~ '" ~ 1b '" W
>-'
W

na
me
n I
Tn
T
n"
rne
back
grou
nd
ref
data
eN
,....
S
EN
S
6 51
3
0 0
Sti
ff a
cade
mic
tes
t pr
oble
m f
or t
esti
ng s
ensi
tivi
ty a
naly
sis
[226
] U
5 "'"
SH
AR
P 1
48
2 0
0 S
harp
fro
nts
[73]
U
l S
HA
RP
2 1
40
2 0
0 S
harp
fro
nts
[73]
U
5 S
HE
EP
6
138
9 0
0 T
rans
port
of
radi
ocae
sium
in
shee
p [1
47]
U5
SH
EL
L
6 44
9
0 0
Che
mic
al r
eact
ion
of a
rom
ates
[4
51
E
SIM
P_E
CO
4
20
2 0
0 S
impl
e ec
olog
ical
sys
tem
[3
96]
U5
SKIN
_D
5 25
10
0
0 T
rans
derm
al d
iffu
sion
(di
scre
tize
d P
DE
) [4
8]
E
SL
IP
12
51
4 6
0 O
scil
lati
ng s
yste
m w
ith
tran
sien
t in
flue
nces
and
sli
p E
S
LU
DG
E
12
194
7 0
0 T
herm
al d
ecom
posi
tion
of
was
tew
ater
slu
dge
by t
herm
ogra
vim
etry
E
S
OO
T
2 40
2
0 0
Soo
ting
met
hane
and
eth
ylen
e fl
ames
for
LII
an
d R
aman
mea
sure
men
ts
[393
] U
5 S
PB
ED
RT
D
2 90
9
0 0
Spo
uted
bed
rea
ctor
mix
ing
mod
el
[213
] U
5 S
S_T
UB
E
2 6
2 1
1 D
iffu
sion
-con
vect
ion
in a
tub
e, s
tead
y-st
ate
E
SS
HE
AT
EX
2
75
3 0
0 S
tead
y-st
ate,
tw
o-pa
ss h
eat
exch
ange
r [2
13]
UO
.5
ST
AB
IL
21
2 0
0 S
tabi
lity
of
chem
ical
rea
ctor
s w
ith
dist
urba
nces
[2
13]
Ul
~
c::::
ST
AG
ED
4
30
6 0
0 T
wo-
stag
e cu
ltur
e w
ith
prod
uct
inhi
biti
on
[115
] U
5 ~
ST
AR
3
10
4 0
0 M
otio
n of
a s
tar
wit
hin
the
pote
ntia
l of
a c
ylin
dric
al g
alax
y E
~
ST
IFF
5
81
9 0
0 S
tiff
dif
fere
ntia
l eq
uati
on
[296
] U
5 .....
. S
TIF
F_D
E
3 30
3
0 0
Sti
ff O
DE
[4
08]
U5
i2 S
TIF
F_E
Q
5 24
2
0 0
Sti
ff O
DE
[4
81]
U5
t-<
ST
IFF
1 3
27
3 0
0 S
tiff
tes
t pr
oble
m
[432
] X
~
ST
IFF
2
4 36
2
0 0
Sti
ff te
ot p
robl
em
[432
] X
~
SU
B_A
CC
U
4 21
3
0 0
Sub
stra
te a
ccum
ulat
ion
wit
h tw
o-ph
ase
aero
sols
E
S
UB
TIL
IS
2 90
7
0 0
Gro
wth
and
pro
duct
for
mat
ion
of B
. su
btil
is i
n ba
tch
or c
onti
nuou
s [1
15]
U5
~ cu
ltur
e on
mol
asse
s '-l
~
SU
LF
UR
9
31
5 1
0 R
adio
acti
ve s
ulfu
r E
~
SU
PE
RO
X1
3 16
4 0
0 D
ism
utat
ion
of s
uper
oxid
ion
to
H2
0 a
nd
02
E
c;
)
SU
PE
RO
X2
5 19
8 0
0 C
atal
ized
rea
ctio
n of
sup
erox
id i
on
E
~ T
AB
_DIS
1
7 94
1
0 0
Imm
edia
te r
elea
se o
f so
lid
dosa
ge f
orm
s, e
xten
ded
mod
el
[269
] E
b
TA
B_D
IS2
4 93
1
0 0
Imm
edia
te r
elea
se o
f so
lid
dosa
ge f
orm
s, d
iscr
ete
dist
ribu
tion
[3
95]
E
~ T
AB
_DIS
3 5
98
0 0
Imm
edia
te r
elea
se o
f so
lid
dosa
ge f
orm
s, l
ogno
rmal
dis
trib
utio
n [2
691
E
~
(con
tinu
ed)
~ i2 C"'< c,., ~ t;i ~

nam
e n
rn
me
TA
B_D
IS4
5 98
0
TA
B_D
IS5
4 98
0
TA
B_D
IS6
4 98
0
TA
B_D
IS 7
5
98
TA
B-D
ISts
2
J 2
45
5
U
TA
NK
2
18
1 ()
TA
NK
BL
D
2 9
2 ()
TA
NK
DIS
1
11
1 0
TA
NK
HY
D
3 40
3
0 T
EF
LO
NI
7 12
9 2
()
TE
FL
ON
2
3 45
1 2
()
TE
MP
CO
NT
2
29
2 ()
TE
ST
_OD
E
2 10
1
()
TH
ER
M
2 36
2
0 T
OL
UE
NE
7
39
3 0
TR
ICH
O
4 44
2
0 T
UB
DY
N
3 20
0 8
0 T
UB
ED
2
19
1 0
TU
BE
MIX
3
54
6 0
TU
RB
CO
N
3 90
4
0 T
WO
EX
3
128
4 0
TW
OO
NE
2
20
3 0
TW
OS
TA
GE
2
40
4 0
TW
OT
AN
K
3 80
2
0 U
PT
AK
E
9 51
5
0
US
_CS
TR
3
72
2 0
VA
RM
OL
3
78
2 0
VA
RV
OL
4
154
3 0
VD
POL
_O
2 16
2
0
rne
back
gT'!m
nd
0 Im
med
iate
rel
ease
of
soli
d do
sage
for
ms,
nor
mal
dis
trib
utio
n 0
Imm
edia
te r
elea
se o
f so
lid
dosa
ge f
orm
s, c
hi-s
quar
e di
stri
buti
on
0 Im
med
iate
rel
ease
of
soli
d do
sage
for
ms,
Wei
bul
l di
stri
buti
on
0 Im
med
iate
rel
ease
of
soli
d do
sage
for
ms,
Bat
eman
dis
trib
utio
n lJ
Imm
edia
te r
elea
se o
f so
lid
dosa
ge f
orm
s, a
ll d
istr
ibut
ions
0
Sin
gle
tan
k w
ith
n-t
h o
rder
rea
ctio
n ()
L
iqui
d st
ream
ble
ndin
g 0
Lad
le d
isch
arge
pro
blem
0
Inte
ract
ing
tan
k r
eser
voir
s 0
Vis
cous
-ela
stic
mat
eria
l ()
V
isco
us-c
last
ic m
ater
ial
0 F
eedb
ack
cont
rol
of a
wat
er h
eate
r 0
Non
line
ar O
DE
wit
h rh
s ((
a*lo
g(y)
+b)
/(t+
2)-5
)*Y
0
The
rmal
sta
bili
ty o
f a
CS
TR
0
Tol
uene
hyd
roge
nati
on b
y ca
taly
tic
reac
tion
0
Uns
truc
ture
d gr
owth
of
tric
hosp
oron
cu
tan
eum
0
Dyn
amic
tu
bu
lar
reac
tor,
eig
ht t
anks
in
seri
es w
ith
nth-
orde
r re
acti
ons
0 A
xial
con
cent
rati
on p
rofi
le i
n a
tub
ula
r re
acto
r 0
Non
-ide
al t
ub
e-ta
nk
mix
ing
mod
el
0 T
urbi
dost
at r
espo
nse
0 C
ompl
ex t
wo-
solu
te b
atch
ext
ract
ion
wit
h in
terc
hang
ing
equi
libr
ia
0 C
ompe
titi
on b
etw
een
orga
nism
s 0
Tw
o-st
age
chem
osta
t w
ith
addi
tion
al s
trea
m
()
Tw
o ta
nk
lev
el c
ontr
ol
0 C
om
par
tmen
t m
odel
for
upt
ake,
met
abol
ic c
onve
rsio
n an
d e
xcre
tion
of
a dr
ug
0 U
nste
ady
stat
e of
a c
ompl
ex r
eact
ion
in a
CS
TR
0
Gas
pha
se t
ub
ula
r re
acto
r 0
Var
iabl
e vo
lum
e fe
rmen
tati
on
0 V
an d
er P
ol e
quat
ion,
ele
ctri
cal
circ
uit
r-ef
da
ta
[269
], [3
95]
E
[269
], [3
95]
E
[269
], [3
95]
E
[269
], [3
95]
E
l26g
], [
ag5]
E
[2
13]
Ul
[213
] U
5 [2
13]
U5
[213
] U
1 [2
31]
E
[231
] E
[1
15]
U5
U5
[213
] U
5 [2
9],
[279
] E
[1
4]
U5
[213
] U
5 [2
13]
U5
[213
] U
5 [1
15]
U5
[213
] U
5 [1
15]
U5
[115
] U
5 [2
13]
U1
E
[466
] U
5 [2
13]
U5
[115
] U
5 [1
81]
SO
( con
tinu
ed)
~
'1:1
"\:i
tr:J ~ ~ I:!:i ~
:g (1)
;:l N- fl· I:!:i ~
~ ~ '" ~ (i;" '" eN
.....
c.n

na
me
n m
m
,. m
e ba
ckgr
ound
V
DP
OL
_M
2 18
2
0 V
ER
T _C
HL
8
30
4 6
WA
VE
_Dl
100
10
0
WA
VE
_D2
100
10
0
WE
ED
S
8 16
2
0 W
EIB
EL
3
13
1 0
WN
DS
HE
AR
10
7
6 35
Y
EA
ST
OS
C
15
5 0
o V
an d
er P
ol e
quat
ion,
ele
ctri
cal
circ
uit
6 In
ject
ed f
luid
flo
w i
n a
long
, ve
rtic
al c
hann
el (
4th
orde
r B
VP
) o
Hyp
erbo
lic
wav
e eq
uati
on
wit
h ex
act
solu
tion
, P
DE
di
scre
tize
d (D
iric
hlet
) o
Hyp
erbo
lic
wav
e eq
uati
on
wit
h ex
act
solu
tion
, P
DE
di
scre
tize
d (N
eum
ann)
o
Gro
wth
of
two
wee
ds i
n co
mpe
titi
on
o Il
l-co
ndit
ione
d ac
adem
ic e
quat
ion
o O
ptim
al t
ake-
off
traj
ecto
ries
und
er w
ind
shea
r o
Osc
illa
ting
con
tinu
ous
Bak
er's
yea
st c
ultu
re
ref
data
eN
>
-'
[181
] U
5 ~
[8]
U5
[376
] U
5
[376
] X
[361
J E
U5
[300
J E
[115
J U
5
~
c::; ~ ~ >-
..; f2 t:-<
tJ ~ l;2 ~
"-l ~
~
CJ ~ b ;j
~ ~ f2 t:-<
V:l ~ ~ ~

APPENDIX B: Appendix 13: Test E:r:arnples 317
5. Differential Algebraic Equations As before, we have r data sets (ti' Cj, yfj) with I = ltlc'f', and I weights Weights can become zero in
cases when the corresponding measurement value is missing, if artificial data are needed, or if plots are to be generated for state variables for which experimental data do not exist. The subsequent table contains the actual number [ <::: I of terms taken into account in the final least squares formulation,
The data fitting function h(p, y(p, t, c), z(p, t, c), t, c) depends on a concentration parameter c and in addition on the solution y(p, t, c) and z(p, t, c) of a system of md differential and ma algebraic equations
YI P, (p, y, z, t, c) , Yl(O) = y~(p, c)
ilrnd Pmd (p, y, z, t, c) Ymd(O) = y!d(P,C)
0 G I (p, y, z, t, c) ZI(O) = z~(p,c) ,
0 G m " (p, y, z, t, c) zma (0) = (p,c)
Without loss of generality, we assume that the initial time is zero, Now y(x, t, c) and z(x, t, c) are solution vectors of a joint system of md + rna differential and algebraic equations (DAE), The initial values of the differential equation system y~(p,c) . .. , Y!d(P, c) and z~(p,c), (p,c) may depend on one or more of the system parameters to be estimated, and on the concentration parameter c.
The system of differential equations is called an index-I-problem or an index-I-DAE, if the algebraic equations can be solved with respect to z, i.e., if the matrix
\7 zG(p, y, z, t, c)
possesses full rank, see Section 5 of Chapter 2 and Section 4 of Chapter :, for further details. In this case, consistent initial values can be computed internally.
The resulting parameter estimation problem is
P E JR"
min I:~'~1 I::~I I:~'~1 (11I~j(h,(p.y(p,t"c)),z(p,t"Cj),t"c]) - Y:J))2
g} (p) = O. j = I, .... me
g} (p) 2: o. j = me + 1. ' , m,
Pl <::: P <::: Pu .
We assLlme that the model functions hk(p, y, z, t, c) and gj(p) arc continuously differentiable functions of p, k = 1. .. , , ,. and j = 1, , ' .. m" and that the state variables y(p, t" c]) and z(p, ti, cJ ) are smooth solutions subject to p. All test problems based on differential algebraic equations are listed in Table B .. ), where constraint counts are omitted.

Tabl
e B
.5.
Dif
fere
ntia
l A
lgeb
raic
Equ
atio
ns
w
......
00
na
me
n I
md
m
a
back
grou
nd
ref
data
2L
KC
_RO
B
5 80
12
5
Tw
o-li
nk p
lana
r ro
bot
wit
h co
nstr
aint
s [8
] U
5 A
ER
OS
OL
4
29
2 2
Sub
stra
te c
once
ntra
tion
in
two-
phas
e ae
roso
l de
vice
s E
B
AT
CH
9
128
6 3
Isot
herm
al b
atch
rea
ctor
, sl
ow a
nd f
ast
reac
tion
s [3
6]
U5
BA
TC
H-E
9
204
6 3
Isot
herm
al b
atch
rea
ctor
, sl
ow a
nd f
ast
reac
tion
s, t
wo
dat
a se
ts
[36]
E
B
AT
CH
-El
9 13
1 6
1 Is
othe
rmal
bat
ch r
eact
or,
slow
and
fas
t re
acti
ons,
dat
a fo
r 40
deg
C
[36]
, [4
36]
E
BA
TC
H-E
2 9
84
6 1
Isot
herm
al b
atch
rea
ctor
, sl
ow a
nd f
ast
reac
tion
s, d
ata
for
67 d
eg C
[3
6],
[436
] E
B
AT
CH
-E3
9 12
4 6
1 Is
othe
rmal
bat
ch r
eact
or,
slow
and
fas
t re
acti
ons,
dat
a fo
r 10
0 de
g C
[3
6],
[436
] E
B
AT
CH
RE
A
5 66
6
Bat
ch r
eact
or
[67]
U
5 B
ON
D
4 24
2
1 T
rans
itio
n of
pho
ton
in a
hyd
roge
n-hy
drog
en b
ond
[250
] U
5 B
UB
BL
EC
3
72
8 5
Bub
ble
poin
t ca
lcul
atio
n fo
r a
batc
h di
stil
lati
on c
olum
n [2
13]
U5
CE
LL
S
5 12
0 3
2 C
ulti
vati
on o
f is
olat
ed p
lant
cel
ls i
n su
spen
sion
cul
ture
[3
12]
Ul
CO
ND
EN
S
2 11
4 1
5 C
onde
nsat
ion
of m
etha
nol
wit
h co
nsta
nt v
olum
e [3
33]
U5
~
DA
E-E
X
2 12
3
0 D
AE
wit
h si
ngul
arit
y U
5 ~
DA
E...
Il 2
100
4 A
cade
mic
exa
mpl
e, i
ndex
-I-f
orm
ulat
ion
SO
~ D
AE.
..I2
2 40
4
Aca
dem
ic e
xam
ple,
ind
ex-2
-for
mul
atio
n SO
'-
;
DA
E...I
3 2
40
4 A
cade
mic
exa
mpl
e, i
ndex
-3-f
orm
ulat
ion
SO
;2 D
AE
...IN
2 2
26
2 S
yste
m o
f th
ree
diff
eren
tial
alg
ebra
ic e
quat
ions
wit
h in
dex
2 [8
] U
5 t-<
DA
KS
YS
2
20
2 P
arti
cle
diff
usio
n an
d re
acti
on (
2nd
orde
r B
VP
) [8
] U
l ~
DIS
TIL
L
3 66
22
22
D
isti
llat
ion
colu
mn
for
two
subs
tanc
es
[175
] U
l ~
DIS
TIL
L3
9 20
5 10
6 53
D
isti
llat
ion
colu
mn
for
thre
e su
bsta
nces
U
l E
VA
PO
R
3 38
3
10
Eva
pora
tion
of
benz
ol w
ith
cons
tant
vol
ume
[286
] U
5 ~
EX
OB
AT
CH
4
80
5 6
Bat
ch r
eact
or w
ith
stro
ngly
exo
ther
mic
rea
ctio
ns a
nd c
oolin
g ja
cket
[4
60]
U5
>-3 ~
GA
S...A
BS3
2
100
1000
0
N-p
late
gas
abs
orbe
r w
ith
cons
tant
inl
et f
eed
stre
am,
1000
pla
tes
[279
] U
5 ~
HY
DR
OD
YN
2
15
2 U
nipo
lar
hydr
odyn
amic
mod
el f
or s
emic
ondu
ctor
s in
the
iso
trop
ic c
ase
[8]
U5
ME
M_W
IRE
5
40
3 O
ptim
al f
orm
of
shap
e m
emor
y w
ires
U
I ~
P...I
DE
NT
6
138
2 Id
enti
fica
tion
of
para
met
ers,
aca
dem
ic e
xam
ple
[285
] U
5 t::I
P
EN
DU
LU
M
2 80
4
Pla
in p
endu
lum
U
l ~ ~
(con
tinu
ed)
~ ;2 t-<
C/:) ~ ~ ~

na
me
n
I m
d
rna
PH
OS
PH
_A
3 54
3
2 R
ES
PIR
3
40
1 1
SH
OC
K
4 60
6
3 T
RA
NS
IST
3
11
3 2
TR
UC
K
3 84
22
1
TU
BU
LA
R
8 42
2
2 U
RE
TH
AN
8
90
3 10
V
DP
OL
2
10
1
back
gr'o
und
ref
Che
mic
al r
eact
ion,
pho
spho
resc
ence
H
nman
res
pira
t.or
y sy
stem
[4
63]
Rea
ctio
n zo
ne i
n d
eto
nat
ing
exp
losi
ves
[119
] T
rans
isto
r am
plif
ier,
hig
hly
osci
llat
ing
Tru
ck m
odel
(rn
ulti
body
sys
tem
) [4
20]
Sta
tio
nar
y t
ub
ula
r re
acto
r w
ith
cool
ing
wal
l [2
96]
Ure
than
rea
ctio
n in
a s
emi
bat
ch r
eact
or w
ith
two
feed
ves
sels
[2
4]
Van
der
Pol
equ
atio
n, e
lect
rica
l ci
rcui
t
da
ta
U5
U5
U5
E
U1
U5
U1
SO
~ ~ § ~ t1l ~
~ '" ;l "- H' t1l ~
~ ~ '" ;l ~ " Or
. W
>-'
(.
0

320 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
6. Partial Differential Equations Now we proceed from r data sets
(tilY;) , i=l, ... ,lt, k=l, ... ,T,
where It time values and I = Itr corresponding measurement values are defined. Moreover, we assume that I weights w~ are given, which can become zero in cases when the corresponding measurement value is missing, if artificial data are needed, or if plots are to be generated for state variables for which experimental data do not exist. The subsequent table contains the actual number f :$ I of terms taken into account in the final least squares formulation. The additional independent model variable c, called concentration in the previous models, is for simplicity not taken into account.
The system of partial differential equations under consideration is
itl F1 (p,u,ux ,uxx ,v,x,t) ,
Unp Fnp(p,u,Ux,uxx,v,x,t)
with state variable u = (Ul, ... , unp)T. We denote the solution of the system of partial differential equations by u(p, x, t) and v(p, t), since it depends on the time value t, the space value x, and the actual parameter value p. v denotes the additional coupled differential variable. To simplify the notation, flux functions are omitted.
Initial and boundary conditions may depend on the parameter vector to be estimated. Since the starting time is assumed to be zero, initial values have the form
u(p,X,O) = uo(p,x)
and are defined for all x E (XL, XR). For both end points XL and XR we allow Dirichlet or Neumann boundary conditions
U(p,XL,t) uL(p, v, t)
U(P,XR,t) uR(p,v, t)
U",(P,XL,t) uL(p, v, t)
U",(p,XR,t) uR(p, v, t)
for 0 < t :$ T, where T is the final integration time, for example the last experimental time value tit. We do not require the evaluation of all boundary functions. Instead, a user may omit some of them depending upon the structure of the PDE model, for example whether second partial derivatives exist in the right-hand side or not.
In addition, the partial differential equation may depend on the solution of a system of ordinary differential equations v E JRnc given in the form
for j = 1, ... , n c , where u(p, x, t) is the solution vector of the partial differential equation. Here Xj are any x-coordinate values where the corresponding ordinary differential equation is coupled to the partial one. Some of these values may coincide. When discretizing the system by the method of lines, they are rounded to the nearest neighboring grid point. The corresponding initial values
v(p,O) = vo(p)
may depend on the parameters to be estimated. Each set of experimental data is assigned a spatial variable value Xk E (XL, XR), k = 1, ... , r, where
r denotes the total number of measurement sets. Some or all of the xk-values may coincide, if different

APPENDIX B: Appendix B: Test Examples 321
measurement sets are available at the same local position. Since partial differential equations are discretized by the method of lines, the fitting points Xk are rounded to the nearest spatial grid point or line, respectively.
The resulting parameter estimation problem is
min 2:::~1 2:::~, (w7(hk(p,U(P,Xk,ti),ux(p,xk,t.), uxx(p,Xk,ti),V(p,ti),ti) - y7))2
pElRn : gj(p)=O, j=l, ... ,me ,
gj(p) "2::0, j=me +1, ... ,mr ,
Pl:O: p:O: Pu .
For more details, see Section 6 of Chapter 2 and Section 5 of Chapter 3. It must be assumed that all model functions hk(p, u, Ux, Uxx , v, t) and gj(p) are continuously differentiable subject to p for k = 1, ... , r and j = 1, ... , me, also the state variables and their spatial derivatives u(p, x, t), ux(p, x, t), uxx(p, x, t), and v(p, t).
All test problems of our collection based on time-dependent, one-dimensional partial differential equations are listed in Table B.6. Not listed are the number of integration areas, switching times, and structure of the boundary conditions. Equality constraints do not exist in this case, and me is therefore omitted.

Tabl
e B
. 6.
Par
tial
Dif
fere
ntia
l E
quat
ions
w
~ ~
na
me
n I
np
nc
m
r ba
ckgr
ound
re
f da
ta
2AR
EA
S 5
24
1 0
0 D
iffu
sion
(F
ick'
s la
w)
in t
wo
area
s [3
77]
V5
2ME
MB
RA
N
4 26
3
0 T
wo
mem
bran
es w
ith
expl
icit
ly m
odel
ed t
rans
itio
n E
A
CC
RE
T
1 40
2
0 0
The
rmal
equ
ilib
rium
cur
ves
in K
eple
rian
acc
reti
on d
isks
[3
42]
V5
AD
V...
DIF
F 2
60
3 0
0 A
dvec
tion
-dif
fusi
on e
quat
ion
wit
h R
iem
ann
init
ial
dat
a [2
27]
VI
AD
V_D
OM
2
150
1 0
0 A
dvec
tion
dom
inat
ed e
quat
ion,
wav
e fr
om l
eft
boun
dary
[4
30]
V5
AD
V_D
OM
S 2
48
3 0
0 A
dvec
tion
dom
inat
ed e
quat
ion,
wav
e fr
om l
eft
boun
dary
, w
ith
sens
itiv
-[4
30]
VI
ity
equa
tion
s A
DV
_VC
2
60
0 0
Adv
ecti
on e
quat
ion
wit
h va
riab
le c
oeff
icie
nt
[437
] X
A
DV
_VT
C
3 90
2
0 0
Adv
ecti
on e
quat
ions
wit
h va
riab
le t
ime
coef
fici
ent
[437
] V5
A
DV
EC
_2N
3
50
0 0
Non
line
ar u
nste
ady
adve
ctio
n (n
=2)
[4
65]
VI
AD
VE
C_5
N
3 20
0
0 N
onli
near
uns
tead
y ad
vect
ion
(n=
5)
[465
] V5
A
DV
EC
_CP
2
20
2 2
0 T
wo
coup
led
adve
ctio
n eq
uati
ons
wit
h pe
riod
ic b
ound
ary
cond
itio
ns
[243
], [4
65]
X
~
AD
VE
C..L
V
4 35
1
0 0
Lin
ear
unst
eady
adv
ecti
on-d
iffu
sion
[4
65]
V5
~ A
DV
EC
_PB
1
50
1 0
Adv
ecti
on w
ith
peri
odic
bou
ndar
y co
ndit
ion
[243
], [4
65]
V5
~ A
DV
EC
_S
4 5
0 0
Lin
ear
stea
dy a
dvec
tion
-dif
fusi
on w
ith
sour
ce t
erm
[4
65]
V5
.....,
AD
VE
CT
17
1 0
0 A
dvec
tion
equ
atio
n, f
irst
-ord
er h
yper
boli
c P
DE
[3
76]
X
~ ADVECT~
128
0 0
Adv
ecti
on e
quat
ion
wit
h a
nonl
inea
r so
urce
ter
m
[337
] V5
t-<
AD
VE
CT
_R
180
0 0
Adv
ecti
on e
quat
ion,
fir
st-o
rder
hyp
erbo
lic
PD
E
[376
] X
~
AD
VE
CT
ll
1 12
8 2
0 0
Adv
ecti
on w
ith
a no
nlin
ear
sour
ce t
erm
and
sen
siti
vity
equ
atio
ns
[337
] V5
~
AD
VE
CT
2 2
190
2 0
0 T
wo
adve
ctio
n eq
uati
ons
(dif
fere
nt f
lux
dire
ctio
ns)
[376
] X
A
DV
EC
T2A
2
190
2 0
0 T
wo
adve
ctio
n eq
uati
ons
(dif
fere
nt f
lux
dire
ctio
ns,
two
area
s)
[376
] X
~
AF
FIN
4
60
2 0
0 A
ffin
ity m
embr
ane
sepa
rati
on o
f a
prot
ein
solu
tion
[6
8]
V5
~
~
AIR
..FL
OW
32
3
0 0
Flow
of
air
in s
hock
-tub
e (E
uler
equ
atio
ns o
f ga
s dy
nam
ics,
Rie
man
n [3
37]
VI
~
data
) a
AL
..AL
LO
Y
2 20
0
0 F
init
e he
at-c
ondu
ctin
g in
alu
min
um a
lloy
[27]
, [1
31]
E
~ A
RA
_YA
RN
3
120
0 0
Wat
er p
enet
rati
on i
n an
ara
mid
e ya
rn
[436
] V5
b
AX
..DIF
F
2 11
0
0 C
onti
nuou
s tu
bula
r re
acto
r w
ith
axia
l di
ffus
ion
[77]
SO
~ :..:
(c
onti
nued
) es ~ t-<
er
, ~ ~ ~

na
me
n np
nc
B
EE
TL
ES
2
80
1 0
BIN
D S
ITE
6
50
6 0
BIO
FIL
M
3 20
2
2 B
LD
_BR
N
10
14
6 B
LO
W_U
P
1 49
0
BR
AIN
3
90
1 0
BR
INE
15
2
0 B
RU
SS
EL
3
120
2 0
BS
E
4 10
1
0 B
UB
B_B
IO
10
3 0
BU
BB
LE
2
108
2 0
BU
RG
ER
24
0
BU
RG
ER
_E
120
0 B
UR
GE
R_F
1
20
0 B
UR
GE
R.l
3
32
0 BURGER~
3 50
0
BU
RS
T
105
2 0
CA
LIB
R
12
195
4 4
CA
RR
IER
3
12
3 2
CD
_TR
AN
S
1 28
1
0 C
NT
_CU
R1
4 80
2
0
CO
MP
_ME
D
3 10
0
CON~IV1
1 90
1
0 C
ON
_DIV
2 1
63
1 0
CO
NT
AM
IN
3 24
4
4 C
PL
.AD
V
2 90
2
2 C
RY
ST
AL
4
51
2 0
rnT"
ba
ckgm
und
0 F
Ica
beet
les
in c
ulti
vate
d li
near
arr
ays
of c
olla
rd p
atch
es (
inse
ct d
is-
pers
al s
tudy
) 0
Pla
sma,
ext
rava
scul
ar,
and
bin
ding
sit
es w
ith
two
inje
ctio
ns
0 D
oubl
e su
bst
rate
bio
film
rea
ctio
n 0
Blo
od-b
rain
bar
rier
0
Deg
ener
ated
par
abol
ic e
quat
ion
wit
h bl
ow-u
p 0
Tra
nspo
rt p
heno
men
a in
bra
in t
issu
e 0
Bri
ne t
ran
spo
rt i
n po
rous
med
ia
0 B
russ
elat
or w
ith
diff
usio
n 0
Bla
ck-S
chol
es e
quat
ion
gove
rnin
g pr
ice
of d
eriv
ativ
e se
curi
ty
0 B
ubbl
e co
lum
n bi
o-re
acto
r 0
Dyn
amic
oxy
gen
upta
ke o
f w
ater
in
bubb
le c
olum
n 0
Par
abol
ic B
urge
r's
equa
tion
wit
h ex
act
solu
tion
0
Vis
cous
Bur
ger'
s eq
uati
on w
ith
exac
t so
luti
on,
mue
=O
.Ol
0 V
isco
us B
urge
r's
equa
tion
wit
h ex
act
solu
tion
, m
ue=
l 0
Bur
ger'
s eq
uati
on i
n th
e in
visc
id l
imit
0
Vis
cous
Bu
rger
', eq
uati
on w
ith
exac
t so
luti
on.
8ps=
0.00
05
0 C
risi
s in
duce
d in
term
itte
nt
burs
ting
in
re
acti
on-d
iffu
sion
ch
emic
al
syst
ems
0 S
ub
stra
te d
iffu
sion
th
rou
gh
tw
o ar
eas
0 D
iffu
sion
th
rou
gh
mem
bran
e ba
sed
on c
arri
er e
ffec
t 0
Con
vect
ive-
disp
ersi
ve t
ran
spo
rt e
quat
ion
wit
h no
nlin
ear
reac
tion
s 0
Cou
nter
-cur
rent
sep
arat
ion
of f
luid
ph
ase
conc
entr
atio
ns w
ith
phas
e eq
uili
briu
m
0 In
fini
te c
ompo
site
med
ium
0
Per
iodi
c co
nvec
tion
dom
inat
ed d
iffn
sion
0
Per
iodi
c co
nvec
tion
dom
inat
ed d
iffu
sion
0
Con
tam
inat
ion
of a
queo
us s
olut
ions
0
Tw
o co
uple
d li
near
adv
ecti
on e
quat
ions
0
Cry
stal
dis
solu
tion
fro
nts
in f
low
s th
rou
gh
por
ous
med
ia
ref
[19J
[115
J
[142
J [1
9]
[491
] [1
38],
[388
] [4
2],
[485
] [3
11]
[421
] [3
76],
[388
J [3
76],
[388
] [4
87J,
[337
]
[128
], [1
24J
[234
] [3
40J
[88J
[2
89J
[289
J [3
88]
[265
] [2
32]
( con
tinu
ed)
data
SO
E
U5
E
U5
U5
X
U5
Ul
U5
U5
X
X
X
U5
X
U5
E
U5
U5
U5
Ul
X
X
U5
U1
U5
~ '" 't: I:t:
i ~ ~ ~ ~
'::l
'::l " ;:: "- H"
!=:J ~
~ ~ ., ~ " On
~
tv
W

t ba
ckgr
ound
re
f da
ta
w
na
me
n np
nc
m
T
tV
CSE
2
41
2 0
0 C
ubic
Sch
roed
inge
r eq
uati
on w
ith
one
soli
ton
[377
] U
5 .,.
CTFLOW~
44
2 0
0 T
wo
inco
mpr
essi
ble
coun
ter-
curr
ent f
low
s of
bin
ary
liqu
id m
ixtu
re w
ith
[307
] U
5 pe
rmea
ble
wal
l C
TR
L_W
AV
20
40
2
0 0
Opt
imal
con
trol
pro
blem
, w
ave
equa
tion
U
5 C
UB
IC
1 10
1
0 0
Cub
ic c
onse
rvat
ion
law
wit
h R
iem
ann
dat
a [1
93]
U5
DA
MB
RE
AK
2
30
2 0
0 Id
eali
zed
dam
bre
ak,
sudd
en a
nd c
ompl
ete
rem
oval
[4
30]
U5
DB
VP
2
9 1
0 0
Dir
ichl
et b
ound
ary
valu
e pr
oble
m w
ith
dom
inat
ing
heat
sou
rce
[83]
U
5 D
C_T
UB
E
1 7
1 0
0 D
iffu
sion
-con
vect
ion
in a
tub
e U
l D
EH
YD
RO
4
60
2 0
0 D
ehyd
roge
niza
tion
of
ethy
lben
zene
to
styr
ene
in a
tub
ular
rea
ctor
[4
66]
UO
.5
DE
RM
AL
10
25
2
4 0
Tra
nsde
rmal
ski
n m
odel
in
two
area
s w
ith
tran
siti
ons
[431
] E
D
ES
IGN
1
56
0 0
Fir
st-o
rder
hyp
erbo
lic
PD
E,
inho
mog
eneo
us p
art
[448
] U
l D
IAL
YS
Il
4 17
9 0
Dia
lysi
s m
embr
ane
wit
h ex
pone
ntia
l di
ffus
ion
coef
fici
ent,
long
ter
m
E
expe
rim
ent
~
DIA
LY
SI2
2 96
2
0 S
ubst
rate
dif
fusi
on t
hrou
gh d
ialy
sis
mem
bran
e E
D
IAL
YSI
3 3
100
1 1
0 S
ubst
rate
dif
fusi
on t
hrou
gh d
ialy
sis
mem
bran
e w
ith
two
area
s E
~
DIA
LY
SI4
8 29
8 3
3 0
Sub
stra
te d
iffu
sion
thr
ough
dia
lysi
s m
embr
ane
wit
h 2
area
s, 3
dat
a se
ts
E
~ D
IAL
YSI
5 7
298
3 3
0 S
ubst
rate
dif
fusi
on t
hrou
gh d
ialy
sis
mem
bran
e w
ith
2 ar
eas,
3 d
ata
sets
E
...,
DIF
F_l
D
4 15
1 0
0 D
iffu
sion
pro
blem
wit
h D
iric
hlet
and
Neu
man
n bo
unda
ry c
ondi
tion
s E
~
DIF
F..A
DS
3
50
2 0
0 D
iffu
sion
and
abs
orpt
ion
reac
tion
E
t-<
DIF
F_C
ON
2
40
0 0
Dif
fusi
on-c
onve
ctio
n pr
oble
m w
ith
disc
onti
nuou
s co
effi
cien
ts
[421
] U
5 52
DIF
F..E
TH
2
50
0 0
Dif
fusi
on o
f et
hano
l in
wat
er
[466
], [1
99]
U5
~ D
IFF
_NL
B
4 35
0
0 N
onli
near
dif
fusi
on w
ith
nonl
inea
r bo
unda
ry c
ondi
tion
[4
21]
U5
DIFF~
3 12
2
0 Fl
ow w
ith
diff
usio
n th
roug
h tu
be w
all
U5
~ D
IFF
PT
3
10
0 0
Dif
fusi
on
and
part
itio
ning
in
bi
olog
ical
sy
stem
s,
non-
cont
inuo
us
[304
] U
l '-3
~
tran
siti
on
~
DIF
FU
S
1 81
0
0 D
iffu
sion
equ
atio
n w
ith
cons
tant
par
amet
ers
U5
Q
DIS
RE
3
30
0 0
Non
-iso
ther
mal
tub
ular
rea
ctor
wit
h ax
ial
disp
ersi
on
[213
], [3
88]
U5
~ D
ISR
ET
2
12
2 0
0 N
on-i
soth
erm
al t
ubul
ar r
eact
or w
ith
axia
l di
sper
sion
[2
13],
[388
] U
5 tl
D
RY
2
46
1 2
0 D
ryin
g of
a s
olid
[2
13]
Ul
~ E
CO
LO
GY
2
60
2 0
0 P
opul
atio
n ec
olog
y w
ith
plan
kton
it p
reda
tor-
prey
and
cro
wdi
ng
[247
] U
5 ~
(con
tinu
ed)
~ 52 t-<
Cr.l ~ t;5 ~

nam
e n
l np
n
,
EL
AS
TIC
20
2
0 E
LE
C_D
YN
3
20
2 0
EL
EC
TR
O
3 38
2
0 E
LL
IPT
IC
3 42
0
EN
ER
GY
2
5 1
0 E
NZ
DY
N
:l 22
2
0 F
ILT
WA
SH
2
20
1 0
FIN
AG
2
246
2 ()
FIX
BE
D
3 48
2
0 F
LA
ME
2
48
2 0
FL
OW
2
18
0 F
LO
W_P
MD
1
80
0 F
LO
W_P
MW
3
120
1 0
FL
UID
3
20
2 0
FR
ON
T
2 60
2
0 G
AS
_BU
BB
2
180
14
GA
S_C
ON
V
3 24
3 0
GA
S_D
IFI
8 2
GAS~IF2
15
2 G
LA
CIE
R
2 45
0
GR
OU
ND
_W
5 20
0
GR
OW
TH
2
21
0 H
EA
T
2 6
1 H
EA
T_B
6
36
0
HE
AT
_BD
3 2
32
()
HE
AT
_CD
2
10
0 H
EA
T_C
F
5 11
0
HE
AT
_CO
N
3 76
0
m"
back
grou
nd
0 E
last
ic m
odel
in
cons
erva
tive
for
m w
ith
disc
onti
noui
ty
0 E
lect
rody
nam
ical
app
lica
tion
0
Ele
ctro
dyna
mic
al m
odel
0
Ell
ipti
c te
st p
robl
em
()
Tub
ular
rea
ctor
bas
ed o
n en
ergy
equ
atio
n 0
Dyn
amic
dif
fusi
on a
nd
enz
ymat
ic r
eact
ion
0 F
ilte
r w
ashi
ng
0 N
erve
con
duct
ion
()
Cat
alyt
ic f
ixed
bed
rea
ctor
wit
h on
e ex
othe
rmal
rea
ctio
n 0
Dw
yer-
San
ders
fla
me
prop
agat
ion
mod
el
0 Is
othe
rmal
lam
inar
-flo
w t
ub
ula
r re
acto
r ()
F
low
th
rou
gh
por
ous
med
ia w
ith
dege
nera
te i
niti
al v
alue
s 0
Flo
w t
hrou
gh p
orou
s m
edia
wit
h w
aiti
ng t
ime
0 D
iffu
sion
(F
ick'
s la
w)
in t
wo
area
s 0
Fla
me
prop
agat
ion
mod
el w
ith
non-
cons
tant
mov
ing
fron
t 0
Non
-vis
cous
gas
bub
ble
in o
il w
ith
diff
usio
n 0
Gas
con
vect
ion
0
One
-dim
ensi
onal
gas
dif
fusi
on i
n a
colu
mn
()
One
-dim
ensi
onal
gas
dif
fusi
on i
n a
colu
mn
0 G
laci
er g
row
th w
ith
cons
erva
tion
of
mas
s an
d m
omen
tum
, in
com
pres
s-ib
le f
low
0
Sat
ura
tio
n o
f gr
ound
wat
er (
Ric
hard
s eq
uati
on)
0 L
ogis
tic
mod
el o
f po
pula
tion
gro
wth
(F
ishe
r's
equa
tion
) 0
Hea
t eq
uati
on
0 H
eat
equa
tion
, br
eak
poin
ts a
nd
tw
o in
tegr
atio
n ar
eas
wit
h tr
ansi
tion
co
ndit
ion
0 N
onli
near
hea
t eq
uati
on,
boun
dary
con
diti
ons
of t
hir
d t
yp
e 0
One
-dim
ensi
onal
hea
t co
nduc
tion
0
Hea
t tr
ansf
er i
n a
circ
ular
fin
0
Hea
t tr
ansf
er i
n cy
lind
er w
ith
heat
los
s by
con
vect
ion
ref
[87J
[4
4J
[388
J [4
2lJ
[162
] [2
13J
[213
J [3
13J
[451
]' [1
22J
[116
], [4
61],
[388
J [4
49J
[452
J [4
52J
[377
J [3
38J
[227
J
[453
], [3
88J
[447
J [3
76],
[388
J
[379
J [3
79J,
[38J
[4
66J
( con
tinu
ed)
data
U
5 U
5 U
5 U
5 U
5 U
5 U
5 U
5 U
1 U
l U
5 U
1 U
5 U
5 U
5 U
5 E
E
E
U
5
E
U5
U5
U5
U5
U5
U5
U5
~
'1:l
'1:l
I:t:J ~ ~ ~ ~
~
~
(1) ;:l ;:,..
~. b:l
~
~ ~ '" i '" '"" eN "" CJ1

t ba
ckgr
ound
re
f da
ta
w
na
me
n np
nc
m
r ""
HE
AT
_CW
2
10
1 0
0 G
raet
z pr
oble
m w
ith
cons
tant
wal
l he
at f
lux
[379
] U
5 O
'l
HE
AT
_CY
L
2 50
0
0 C
ylin
dric
al h
eat
tran
sfer
[4
21]
U5
HE
AT
.-EX
3
20
0 0
Tub
ular
hea
t ex
chan
ger
[379
] U
5 H
EA
T..!
4
40
0 0
Hea
t eq
uati
on,
two
inte
grat
ion
area
s w
ith
tran
siti
on c
ondi
tion
U
5 H
EA
T_M
S 2
9 2
0 0
Hea
t tr
ansp
ort
equa
tion
at
the
mic
rosc
ale
(3rd
ord
er)
[477
] X
HEAT~LB
2 10
0
0 H
eat
equa
tion
wit
h no
nlin
ear
boun
dary
con
diti
on o
f Ste
fan-
Bol
tzm
ann
[446
] E
ty
pe
HE
AT
.BE
N
3 40
4
0 0
Hea
t co
nduc
tion
wit
h fu
ll se
nsit
ivit
y eq
uati
ons
U5
HE
AT
_SX
1
20
2 0
0 H
eat
equa
tion
wit
h on
e se
nsit
ivit
y eq
uati
on a
nd e
xact
sol
utio
n X
H
EA
T5
DC
3
42
0 0
Hea
t di
ffus
ion
wit
h ti
me-
depe
nden
t di
ffus
ion
para
met
er
U5
HE
AT
.JC
1
99
1 0
0 H
eat
equa
tion
wit
h ex
act
dat
a an
d m
axim
um n
orm
X
H
OL
SP
OT
2
110
1 0
0 'H
ot S
pot'
prob
lem
fro
m c
ombu
stio
n th
eory
[4
61]'
[388
] U
5 H
UM
ID
2 33
3
0 0
Hum
idif
icat
ion
colu
mn
of p
orou
s m
ediu
m
[376
] U
1
HY
DR
O
1 32
2
0 0
St.
Ven
ant
equa
tion
for
flu
id d
ynam
ics
of h
ydro
sys
tem
s [1
72]
U5
~
HY
DR
O_2
C
6 20
2
0 0
St.
Ven
ant
equa
tion
for
flu
id d
ynam
ics
of h
ydro
sys
tem
s, t
wo
seri
al
[172
] X
~
chan
nels
~
HY
DR
O-.
FX
32
2 0
0 St
. V
enan
t eq
uati
on
for
flui
d dy
nam
ics
of h
ydro
sy
stem
s,
flux
[1
72]
U5
..., fo
rmul
atio
n ~
HY
G_P
OL
Y
3 74
0
0 D
iffu
sion
of
wat
er i
nto
a hy
gros
copi
c po
lym
er
E
t-<
HY
GR
OS
3
9 0
0 D
iffu
sion
of
wat
er t
hrou
gh b
ound
ary
laye
r of
hyg
rosc
opic
mat
eria
l an
d E
~
air
~ H
YP
-PB
C
2 20
1
0 H
yper
boli
c eq
uati
on w
ith
peri
odic
bou
ndar
y co
ndit
ions
[9
] U
5 H
YP
2ND
30
2
0 0
Hyp
erbo
lic
equa
tion
of
seco
nd o
rder
, al
tern
atin
g co
sine
wav
es
U5
~ H
YP
ER
2
198
2 0
0 S
yste
m o
f tw
o ad
vect
ion
equa
tion
s, f
irst
-ord
er h
yper
boli
c P
DE
s U
5 "":
l ~
HY
PE
RB
Ol
2 90
2
0 0
Hyp
erbo
lic
test
sys
tem
[1
8]
U5
~
HY
PE
RB
02
2
90
2 0
0 H
yper
boli
c te
st s
yste
m
[18]
U
5 c:J
H
YP
ER
B0
3
2 90
2
0 0
Hyp
erbo
lic
test
sys
tem
[1
8]
U5
~ H
YP
ER
B0
4
2 90
2
0 0
Hyp
erbo
lic
test
sys
tem
[1
8J
U5
b H
YP
ER
B0
5
3 90
2
0 0
Hyp
erbo
lic
test
sys
tem
[1
8]
U5
~ IN
..LA
YE
R
4 26
2
0 0
Cat
alys
t w
ith
iner
t la
yers
(di
ffus
ion,
abs
orpt
ion,
des
orpt
ion)
U
5 ~
INT
EG
3
25
1 0
0 P
opul
atio
n dy
nam
ics
wit
h in
tegr
o-di
ffer
enti
al e
quat
ion
[337
], [3
88]
E
~ (c
onti
nued
) ~ t-<
t/:
) ~ ~ ~

na
me
n np
nc
IN
TE
RF
I 2
10
I 0
INT
ER
F2
2
18
1 0
INV
_PR
OB
10
20
1
0 IS
OT
HR
MI
10
34
2 0
ISO
TH
RM
2
4 2
0
0
JON
TO
4
17
1 K
ILN
10
22
0
LA
MY
'LO
W
1 10
1
0 L
AP
LA
CE
20
20
0
LD
CP
10
0 0
LIN~DV
4 90
()
LIN
_HC
3
140
0 L
IN_H
YP
I 2
25
0 L
IN-.
HY
P2
3 70
0
LO
SS
LE
SS
2
20
2 0
LU
NG
5
33
I 4
MA
LT
OD
EX
5
12
1 M
AS
S_T
RA
1
25
0 M
EM
_SE
P
3 25
2
0 M
EM
BR
AN
E
3 20
2
0 M
ILL
I 80
0
MIL
L2
5 40
0
MIL
L3
2 80
0
MO
LD
IFF
2
10
0 M
OV
FR
ON
T
3 12
6 0
MX
_EN
TR
O
9 80
1
0 M
ZY
'UR
N
5 63
2
0 N
_CO
NV
EX
1
36
0 N
DY
N
3 20
2
0
me
back
grou
nd
0 S
yste
m w
ith
inte
rfac
e (n
ot m
odel
ed)
()
Sys
tem
wit
h in
terf
ace
9 In
vers
e pr
oble
m i
n he
at c
ondu
ctio
n 4
Rea
ctiv
e so
lute
tra
nsp
ort
, ad
vect
ive-
disp
ersi
ve t
ran
spo
rt
~)
Rea
ctiv
e ~olute
tran
:::;
port
, ad
vect
ive-
di:
:;p
crti
ive
tran
:::l
port
(F
reu
nd
lich
vers
ion)
2
Opt
imal
con
trol
of
iont
opho
resi
s w
ith
thre
e m
embr
anes
0
Hea
ting
a p
robe
in
a ki
ln
0 U
nste
ady
lam
inar
flo
w i
n a
circ
ular
tu
be
0 L
apla
ce e
quat
ion
(ell
ipti
c)
° L
inea
r di
ffus
ion-
conv
ecti
on e
quat
ion
0 L
inea
r ad
vect
ion
prob
lem
, hi
ghly
non
line
ar i
niti
al c
ondi
tion
0
Lin
ear
hea
t co
nduc
tion
0
Fir
st-o
rder
lin
ear
hype
rbol
ic e
quat
ion
0 F
irst
-ord
er l
inea
r hy
perb
olic
equ
atio
n w
ith
inte
rfac
e 0
Los
sles
s el
ectr
ic t
rans
mis
sion
lin
e ()
Pro
tein
app
lica
tion
in
lung
wit
h de
com
posi
tion
0
Dry
ing
of m
alto
dex
trin
in
a co
nvec
tion
ove
n, f
irst
dat
a se
t 0
Mas
s tr
ansf
er w
ith
sim
ulta
neou
s co
nvec
tion
an
d d
iffu
sion
0
Aff
init
y m
embr
ane
sepa
rati
on o
f a
prot
ein
solu
tion
0
Dif
fusi
on t
hrou
gh a
mem
bran
e 0
Rol
ling
mil
l co
olin
g, c
onst
ant
psi
in b
ou
nd
ary
con
diti
on
0 R
olli
ng m
ill
cool
ing,
var
iabl
e ph
i in
bo
un
dar
y c
ondi
tion
0
Rol
ling
mil
l co
olin
g, e
stim
atin
g; h
eat
tran
sfer
coe
ffic
ient
s 0
Mol
ecul
ar d
iffu
sion
(bo
unda
ry v
alue
pro
blem
) 0
Mov
ing
fron
t (B
urge
r's
equa
tion
) 0
Max
imum
ent
ropy
met
hod,
adv
ecti
on-d
iffu
sion
equ
atio
n ()
M
ulti
zone
ele
ctri
cal
furn
ace
for
prod
ucti
on o
f in
tegr
ated
cir
cuit
s 0
Hyp
erbo
lic
test
pro
blem
of
Shu
an
d O
sher
, no
ncon
vex
flux
0
Nit
roge
n an
d a
mm
oniu
m d
ynam
ics
in f
ores
t so
ils
r'e!
[388
J [3
88J
[186
J [2
11],
[21O
J [2
11J,
[210
J
[IO
lJ
[379
], [2
08J
[376
J [3
52],
[340
J [2
17J
[2J
[472
J [4
72J
[377
J
[141
J [3
79J
[67J
[3
16J
[388
J [3
88J
[388
J [2
99J
[2J
[486
J [2
16J
[64]
, [3
88],
[137
J
( con
tinu
ed)
data
U5
U5
U5
U5
US
non
e E
U
5 X
U
5 U
5 X
X
X
X
E
E
U
5 U
5 U
5 SO
U
l V
I E
U
5 U
5 U
O.5
U
5 E
"'" '"tl
'0
t"l ~ ~ t:o "'" :g (1
)
;:l ""- fl' to ~
~ ~ ., ~ 1i)
On w '" --
.j

I ba
ckgr
ound
re
f da
ta
C'-'
na
me
n np
nc
m
T
t-:l
NE
RV
E
4 20
0 2
0 0
Ner
ve p
ulse
[4
62]
U5
00
NL
..HE
AT
3
18
0 0
Non
line
ar h
eat
equa
tion
[4
47]
U5
NL
..PD
E
3 10
0
0 H
ighl
y no
nlin
ear
PD
E w
ith
exac
t so
luti
on
[377
] X
N
L_T
RA
NS
2 11
0
Non
line
ar t
rans
port
equ
atio
n de
velo
ping
a s
hock
(B
urge
r),
peri
odic
[3
84]
U5
boun
dary
N
LIN
PD
E
2 10
0 2
0 0
Tw
o no
nlin
ear
PD
E's
wit
h ex
act
solu
tion
[3
76],
[283
] X
N
LSE
4
18
2 0
0 N
onli
near
Sch
roed
inge
r eq
uati
on,
exac
t so
lito
n so
luti
on (
com
plex
) [3
78]
U1
NO
ISE
2
20
0 0
Non
line
ar d
eblu
rrin
g an
d no
ise
rem
oval
[2
92]
U5
NO
N-A
D
1 60
1
0 0
Non
line
ar a
dvec
tion
-dif
fusi
on e
quat
ion
[227
] U
5 O
BS
TA
CL
E
2 20
2
0 0
Shal
low
wat
er f
low
ove
r an
obs
tacl
e [2
64]
U1
ON
ES
TE
P
2 13
0 2
0 0
One
-ste
p re
acti
on w
ith
diff
usio
n an
d no
n-un
it L
ewis
num
ber
[2]
Ul
OSC
_SO
L
2 20
3
0 0
Osc
illa
tory
sol
utio
n of
hyp
erbo
lic
PD
E
[129
] U
1 PA
CK
_BE
D
2 64
4
0 0
Flu
id
thro
ugh
a pa
cked
be
d w
ith
adso
rpti
on/d
esor
ptio
n of
tw
o U
5 co
mpo
nent
s :.:
PA
R_C
TR
L
2 10
0
0 P
arab
olic
opt
imal
con
trol
pro
blem
[3
05]
X
~ PA
R_S
IN
2 84
0
0 P
arab
olic
PD
E w
ith
inho
mog
eneo
us s
inus
-ter
m
[357
], [3
41]
X
~ P
AR
AB
1 3
8 1
0 0
Bra
in t
rans
port
[1
9]
SO
.... P
AR
AB
2 3
60
2 0
0 P
arab
olic
equ
atio
n, i
dent
ifia
bili
ty t
est
[19]
SO
~
PA
RA
B3
2 30
0
0 P
arab
olic
equ
atio
n, i
dent
ifia
bili
ty t
est
[19]
SO
t:-<
PA
RA
B4
3 30
0
0 P
arab
olic
equ
atio
n, i
dent
ifia
bili
ty t
est
[19]
SO
~
PA
RA
B5
3 10
1
0 0
Par
abol
ic e
quat
ion,
ide
ntif
iabi
lity
tes
t [1
9]
SO
~ P
AR
AB
6 6
27
0 0
Par
abol
ic e
quat
ion,
ide
ntif
iabi
lity
tes
t [1
9]
X
PH
YP
_PB
C
2 20
1
0 P
arab
olic
-hyp
erbo
lic
equa
tion
wit
h pe
riod
ic b
ound
ary
cond
itio
ns
[9]
U5
~ P
OL
LU
TN
8
28
4 0
0 S
ST
pol
luti
on i
n th
e st
rato
sphe
re
[421
], [3
88]
U1
'-,j ~
POL
Y_D
YN
3
15
1 0
Cha
in l
engt
h of
pol
ymer
izat
ion
proc
ess
U5
:.: P
OL
YM
ER
I 9
45
12
0 0
Rad
ical
cop
olym
eriz
atio
n of
met
hylm
etha
cryl
at a
nd s
tyre
n [4
02]
Ul
c:J
PO
OL
3
28
2 0
Eva
pora
tion
of
vapo
r fr
om a
poo
l of
liqu
id
[32]
U
5 ~
QU
EN
CH
I 2
63
1 0
0 D
egen
erat
e no
nlin
ear
quen
chin
g [4
13]
US
t:
l Q
UE
NC
H2
1 6
1 0
0 D
egen
erat
e no
nlin
ear
quen
chin
g [4
13]
U5
~ R
EA
..DIF
1 45
1
0 0
Rea
ctio
n-di
ffus
ion
equa
tion
[1
23]
U5
:..:
(con
tinu
ed)
~ ~ t:-<
er., ~ ~ ~

nam
e n
l n
p
nc
RE
A_D
IF2
2 13
5 1
0 R
ES
ER
VO
I 10
0
RIC
H_E
QU
4
120
0 R
ICH
->;:E
N
3 36
0
RIE
_BN
D
4 20
:>
0
RIE
..LA
X
6 3
0 R
IE_S
OD
1
6 3
0 R
OD
4
10
1 0
SA
LIN
E
4 20
2
2 S
E_P
UL
SE
2
23
0 S
ET
TL
ER
3
10
0 S
H_F
RO
NT
2
20
1 0
SH
EA
R
4 33
3
0 S
IN_G
OR
1 2
80
2 0
SIN
_GO
R2
1 80
2
0 S
ING
ST
EP
2
130
()
SK
IN1
8 24
2
4 S
KIN
2 8
25
3 6
SK
IN3
3 25
2
4 S
KIN
4 3
56
2 4
SK
IN5
7 25
2
4 S
LA
B
3 36
3
()
SL
AB
_CT
R
20
10
0 S
OIL
3
80
2 0
SO
LID
2
14
1 0
SO
LIT
ON
2
20
2 0
SO
RP
-.lS
I 2
11
1 0
SO
RP
-.lS
2 2
11
0 S
OR
P-.
lS3
4 22
0
me
back
grol
lnd
0 It
eact
ion-
diff
usio
n eq
uati
on
0 R
eser
voir
sim
ulat
ion
by t
he
Buc
kley
-Lev
eret
t eq
uati
on
0 S
atu
rati
on
of
grou
nd w
ater
(R
icha
rds
equa
tion
) 0
Sat
ura
tio
u o
f gr
ound
wat
er (
Ric
hard
s eq
uati
on)
0 F
low
of
air
in
sh
ock-
tube
(E
uler
eq
uati
ons
of g
as
dyna
mic
s),
flux
fo
rmul
atio
n 0
Rie
man
n pr
oble
m f
or E
uler
equ
atio
ns,
form
ulat
ion
of L
ax
0 S
od's
Rie
man
n pr
oble
m f
or E
uler
equ
atio
ns o
f a
poly
trop
ic g
as
0 R
od o
f so
lid
expl
osiv
e 0
Dif
fusi
on o
f d
rug
in
a sa
line
sol
utio
n th
rou
gh
mem
bran
e 0
Adv
ecti
on o
f se
mi
elli
pse
puls
e 0
Sol
id d
ynam
ics
wit
hin
sett
ling
zon
e 0
PD
E w
ith
shar
p f
ront
, ex
act
solu
tion
kno
wn
0 S
hear
ban
d f
orm
atio
n 0
Sin
e-G
ordo
n eq
uati
on,
exac
t ki
nk-s
olit
on s
olut
ion
0 S
ine-
Gor
don
equa
tion
, ex
act
kink
-kin
k-co
llis
ion
solu
tion
0
Sin
gle-
step
rea
ctio
n w
ith
diff
usio
n 0
Tra
nsde
rmal
dif
fusi
on
0 S
kin
mod
el w
ith
asso
ciat
ion
kine
tics
()
S
kin
mod
el,
in v
itro
exp
erim
ent,
wit
h pe
rfec
t si
nk
()
Tra
nsde
rmal
dif
fusi
on
0 T
tans
derm
al d
iffu
sion
0
Dw
yer-
San
ders
fla
me
prop
agat
ion
mod
el
16
Tem
per
atu
re c
ontr
ol o
f a
slab
0
Dif
fusi
on o
f w
ater
th
rou
gh
soi
l, co
nvec
tion
an
d d
ispe
rsio
n 0
Hea
ting
of
soli
d sp
here
0
Kin
k so
lito
n (S
ine-
Gor
don
equa
tion
) 3
Rea
ctiv
e so
lute
tra
nsp
ort
. co
nvec
tive
-dif
fusi
ve t
ran
spo
rt (
Fre
undl
ich)
0
Rea
ctiv
e so
lute
tra
nsp
ort
, co
nvec
tive
-dif
fusi
ve t
ran
spo
rt (
Lan
gmui
r)
3 R
eact
ive
solu
te t
ran
spo
rt,
conv
ecti
ve-d
iffu
sive
tra
nsp
ort
Tel
[123
J [4
56J
[453
J, [3
59J
[453
], [3
59J
[337
J
[265
J [2
65J
[428
J [1
50J
[253
J [1
04J
[325
], [1
38],
[388
J [3
78J
[378
] [2
] [3
88],
[48J
[4
8]
[48]
[388
J [3
30J
[12J
[4
54],
[5],
[388
J [1
1)
[210
] [2
10J
[210
]
( con
tinu
ed)
data
U
5 U
5 U
1 U
l U
1
U5
X
Ul
U5
U5
U5
X
Ul
X
X
U1
U1
E
E
U1
E
U5
non
e E
U
S U
5 U
5 U
5 U
5
~
'Cl
'Cl
t:'t:l ~ >;; !J;l ~ '" '" (l
) ;:l
;:,.. H
!J;l
~
~ ~ '" ~ (1
) " W
tv
'-='

t ba
ckgr
ound
re
f da
ta
eN
nam
e n
np
nc
mT
eN
SO
RP
TIO
N
3 41
1
3 T
rans
port
equ
atio
n (d
iffu
sion
and
sor
ptio
n),
grou
nd w
ater
flo
w w
ith
E
0
cont
amin
atio
n S
PH
ER
E
2 16
1
0 0
Hea
t co
nduc
tion
in
sphe
re w
ith
exot
herm
ic c
hem
ical
rea
ctio
n [3
76J
U5
STA
R..N
ET
3
30
3 1
0 P
arab
olic
sta
r ne
t U
l S
TA
RT
BE
D
2 81
0
0 D
iffu
sion
E
S
TA
RT
UP
3
30
11
0 0
Sta
rtup
pha
se o
f an
aut
omob
ile
cata
lyti
c co
nver
ter
[120
J U
l S
TE
PH
AN
2
110
1 0
One
-pha
se S
teph
an p
robl
em
[32J
X
S
TF
FD
ET
I 2
11
0 0
Stif
fnes
s de
tect
ion
[123
J U
5 S
TF
FD
ET
2 2
15
0 0
Stif
fnes
s de
tect
ion
[123
J U
5 S
TR
.FIS
H
2 18
0
0 S
trea
m f
ish
trac
ked
by m
ark-
reca
ptur
e te
chni
que
U5
Tj)
IFF
US
5
45
1 3
0 T
rans
derm
al d
iffu
sion
thr
ough
tw
o m
embr
anes
wit
h tr
ansi
tion
lay
er
E
TE
LE
GR
PH
4
16
2 0
0 T
eleg
raph
equ
atio
n [3
77J
U5
TIM
E_O
PT
6
10
0 5
Tim
e-op
tim
al h
eat
dist
ribu
tion
[3
80J
E
TO
NG
UE
3
20
0 0
Mot
ion
of g
laci
er t
ongu
e [8
5J
U5
~
TR
AF
FIC
1
80
0 0
Tra
ffic
flo
w a
long
a h
ighw
ay
[218
J U
5 ~
TR
AN
_DE
G
3 32
0
0 S
atur
atio
n of
gro
und
wat
er (
Ric
hard
s eq
uati
on)
[453
], [3
59J
U1
~ T
RA
NS
DE
R
3 45
3
0 T
rans
derm
al d
iffu
sion
E
...,
TR
AN
SM
EM
5
45
3 0
Tw
o m
embr
anes
wit
h tr
ansi
tion
are
a E
f2
TR
AV
_WA
V
2 14
0 0
0 T
rave
ling
wav
es (
Bur
ger's
equ
atio
n, e
xact
sol
utio
n kn
own)
[2J
X
t-<
TU
BE
O
2 10
0
0 Z
ero-
orde
r re
acti
on i
n a
cata
lyti
c-w
alle
d tu
be
[67J
U
5 ~
TW
O..P
OP
S
3 40
2
0 0
Tw
o po
pula
tion
s [4
47J
U5
~ V
AR
_VE
LO
2
212
0 0
Fir
st-o
rder
lin
ear
hype
rbol
ic e
quat
ion
wit
h va
riab
le v
eloc
ity
field
[4
72J
X
VIS
CO
US
5
5 5
5 0
Var
iabl
e vi
scos
ities
wit
h pe
riod
ic b
ound
ary
[9J
U5
~ W
AT
ER
50
2
0 0
Flow
of
shal
low
wat
er o
ver
a ba
rrie
r [4
21J,
[207
J U
l >-:
l ~
WA
VE
I 18
0 2
0 0
Hyp
erbo
lic
wav
e eq
uati
on (
exac
t so
luti
on k
now
n)
[376
J U
5 ~
WA
VE
2 2
100
2 0
0 W
ave
equa
tion
in
form
of
two
hype
rbol
ic e
quat
ions
X
W
AV
E3
2 60
2
0 0
Hyp
erbo
lic
wav
e eq
uati
on
[466
J U
5 s;:
WA
VE
4 3
50
2 0
0 T
wo
wav
es t
rave
ling
in
oppo
site
dir
ecti
ons,
sem
i-hy
perb
olic
sys
tem
[4
61]'
[388
J U
l b ~ ~ ~ f2 t-<
U:
J ~ ~ ~

APPENDIX B: Appendix B: Test Examples 331
7. Partial Differential Algebraic Equations Again we proceed from r data sets
(ti'Y~)' i = 1, ... ,It, k = 1, ... ,r,
where It time values and I = Itr corresponding measurement values are ,lefined together with I weights . Some of the weights can become zero in cases when the corresponding measurement value is missing,
if artificial data are needed, or if plots are to be generated for state variables for which experimental data do not exist. The subsequent table contains the actual number [ :::; I of t.erms taken into account in the final least squares formulation.
The system of partial differential algebraic equations under consideration is
where Urj = (UI, .. " and U a = (U lld +l; .. " Und+no)T are the differential and algebraic state variables: U = (Ud, ua ) T. v E JR.". denotes the stat.e variables belonging to the coupled system of ordinary differential and algebraic equations. To simplify the notation, flux functions are omitted.
Initial and boundary conditions may depend on the parameter vector to be estimated. Since the starting time is assurned to be zero, initial values have the fonn
U(p, x, 0) = no(p,x:)
where v = (Ud,Ua)T is the combined vector of all differential and algebraic state variables. For both end points XL and XH we allow Dirichlet or Neumann boundary conditions
U(p,XL,t)
u(p. :rH, t)
u.x(p, :Er., t)
n,,(p,xH, t)
UL(p,v,t)
uR(p,v,t)
uL(p,v.t)
frR(p,v,t)
for () < t :::; T. where T is the final integral ion time. for example the last experimental time value t". They may depen'l in addition on the coupled ordinary differential and algebraic state variables. We do not require the evaluation of all boundary functions. Instead, we omit some of them depending on the structure of t.he PDAE model, for example, whether second partial derivatives exist in the right-hand side or not. Moreover, arbitrary implicit boundary conditions can be formulated as coupled algebraic equations.
The right-hand side of the partial differential equation and the boundary conditions may depend on the solution of a system of coupled ordinary differential algebraic equations t' = (Vd, Va)T E JR.'" given in the forrrl
G,(p, ,,(p, Xl, t), ux(p, X" t), lLu(p, X" t), v, t) ,
Gndc:+1 (p, u(p, X ndc +l, t), u.T(p, Xndc+l, t), uxx(p, Xnde+l, t), v, t)
o

332 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
Xj is an x-coordinate value where the corresponding ordinary differential or algebraic equation is to be coupled to the partial one, j = 1, ... , nco Initial values
v(P,O) = vo(p)
may depend again on the parameters to be estimated. For more details, see Section 6 of Chapter 2 and Section 5 of Chapter 3.
However, we must treat initial and boundary conditions with more care. We have to guarantee that at least the boundary and transition conditions satisfy the algebraic equations
o Fa(p, U(P,XL, t), Ux(P, XL, t), Uxx(p, XL, t), v, XL, t)
o Fa(P, U(p, XR, t), Ux(p, XR, t), Uxx(p, XR, t), v, XR, t) .
If initial conditions for discretized algebraic equations are violated, that is if equation
0= Fa(p,u(p,x,O),ux(p,x,O),uxx(p,x,O),v(p,O),x,O)
is inconsistent after inserting Dirichlet or Neumann boundary values and corresponding approximations for spatial derivatives, the corresponding system of nonlinear equations is solved internally proceeding from initial values given.
Each set of experimental data is assigned a spatial variable value Xk E [XL,XR], k = 1, ... , r, where r denotes the total number of measurement sets. Some or all of the xk-values may coincide, if different measurement sets are available at the same local position. Since partial differential equations are discretized by the method of lines, the fitting points Xk are rounded to the nearest line.
The resulting parameter estimation problem is
min :L~=1 :L:!:1 (W~(hk(p, u(p, Xk, til, ux(P, Xk, til, Uxx(P,Xk,ti),V(p,ti),ti) - yf))2
pElRn : gj(p) =0, j=l, ... ,me ,
gj(p):;::O, j=me +1, ... ,mr ,
PI ~ P ~p" ,
It is assumed that all model functions hk (p, t, u, U x , U xx , v) and gj (p) are continuously differentiable subject to p for k = 1, ... , rand j = 1, ... , mr, and also the state variables and their spatial derivatives u(p, x, t), ux(p, x, t), uxx(p, x, t), and v(p, t).
Test problems with one-dimensional partial differential algebraic equations are listed in Table B.7. Not listed are the number of integration areas, switching times, and structure of the boundary conditions. There are no equality constraints.

Tab
le B
.7.
Par
tial
Dif
fere
ntia
l A
lgeb
raic
Equ
atio
ns
nam
e 2N
D_D
IRl
2ND
_DIR
2 A
CC
RE
T_A
A
CC
RE
T_F
A
CE
TY
LT
A
CE
TY
L_Z
B
EA
MI
BE
AM
2 B
IFU
RC
I B
IFU
RC
2
BV
P_T
RIV
C
AP
ILL
C
NT
_CU
R2
CO
_OX
YD
C
TF
LO
W
CU
SP
E
LA
_TU
BE
ELDYN~
EW
_WA
VE
HE
AT
_A
HE
AT
_F
n rt
d
na
nc
me
back
grou
nd
3 20
3
20
1 20
6
1 11
2 3
2 18
0 10
2
20
10
3 99
2
3 90
2
3 18
0 2
2 30
0 2
10
2 13
1
4 80
3
3 68
2
40
4
2 40
3
3 40
2
3 W
4
2 ~
2
2 2 27
27
2 2
4 1 9 1 2 2 o o o 2 o 2
o o o o o o o o 2 2 o o o 2 o 3 o o o o o
o S
econ
d or
der
Dir
ichl
et p
robl
em
o S
econ
d or
der
inho
mog
eneo
us D
iric
hlet
pro
blem
o
Th
erm
al e
quil
ibri
um c
urve
s in
Kep
leri
an a
ccre
tion
dis
ks
o T
her
mal
equ
ilib
rium
cur
ves
in K
eple
rian
acc
reti
on d
isks
o
Tub
ular
ace
tyle
ne r
eact
or,
tim
e-de
pend
ent
form
ulat
ion
9 T
ubul
ar a
cety
lene
rea
ctor
, sp
ace-
depe
nden
t fo
rmul
atio
n o
Cur
ved
bea
m
o L
inke
d be
ams
o B
ifur
cati
on w
ith
co d
imen
sion
2 (
Gin
zbur
g-L
anda
u eq
uati
on)
o B
ifur
cati
on w
ith
codi
men
sion
2 (
Gin
zbur
g-L
anda
u eq
uati
on),
den
se
obse
rvat
ion
grid
o
Bou
ndar
y va
lue
prob
lem
wit
h kn
own
solu
tion
o
Cap
illa
r fi
lled
wit
h w
ater
und
er e
lect
ric
char
ge
o C
ount
er-c
urre
nt s
epar
atio
n of
flui
d ph
ase
conc
entr
atio
ns w
ith
phas
e eq
uili
briu
m
o C
O o
xyda
tion
on
Pt(
110)
o
Tw
o in
com
pres
sibl
e co
unte
r-cu
rren
t fl
ows
of b
inar
y li
quid
mix
ture
w
ith
sem
i-pe
rmea
ble
wal
l o
Thr
esho
ld-n
erve
im
puls
e w
ith
cusp
cat
astr
op
he
o W
aves
pro
paga
ting
in a
liq
uid-
fill
ed e
last
ic t
ub
e (K
orte
weg
-de
Vri
es
Bur
gers
equ
atio
n)
o E
lect
rody
nam
ic a
ppli
cati
on w
ith
alge
brai
c eq
uati
ons
o W
ave
prop
agat
ion
in
med
ia
wit
h no
nlin
ear
stee
peni
ng
and
d
isp
ersi
on
o H
eat
equa
tion
, fo
rmul
ated
wit
h al
gebr
aic
equa
tion
o
Hea
t eq
uati
on,
form
ulat
ed
wit
h al
gebr
aic
equa
tion
an
d
flux
fo
rmul
atio
n
ref
[258
] [2
58]
[342
1 [3
42]
[39]
[3
9]
[455
], [4
43]
[455
] ,
[443
] [6
] [6]
[248
]
[340
]
[20]
[3
07]
[490
] [2
20]
[44]
[1
82]
data
U
5 U
5 U
5 U
5 SO
Ul
U5
U5
Ul
U1
X
U5
U5
U5
U1
U5
X
U5
X
U5
U5
( con
tinu
ed)
~ ~ ~ ~ !J:l ~
:g '" ;:l ;:,. fl b::
;J
~ ~ " ~ '" '" w
w
w

t ba
ckgr
ound
re
f da
ta
w
na
me
n nd
n
a
nc
me
w
HEAT~LC
2 10
1
0 0
Hea
t eq
uati
on
wit
h no
nlin
ear
boun
dary
co
ndit
ion
of
Ste
fan-
[446
] E
""-
Bol
tzm
ann
type
HEAT~LD
2 10
0
0 H
eat
equa
tion
w
ith
nonl
inea
r bo
unda
ry
cond
itio
n of
S
tefa
n-[4
46]
E
Bol
tzm
ann
type
H
EA
T_R
2
27
2 0
9 H
eat
equa
tion
wit
h dy
nam
ical
res
tric
tion
s an
d al
gebr
aic
equa
tion
U
5 H
EA
LR
AD
2
10
2 0
0 H
eat
cond
ucti
on w
ith
radi
atio
n an
d fo
rced
con
vect
ion
[162
] U
5 K
DV
E
17
2 0
0 Sh
allo
w w
ater
flo
w,
bala
ncin
g fr
ont
shar
peni
ng a
nd d
ispe
rsio
n to
[3
78]
SO
prod
uce
soli
tons
M
CJ)
IST
4
63
4 2
4 0
Mul
ti-c
ompo
nent
dis
till
atio
n [3
07]
U5
NE
T_3
10
10
0 2
2 0
Net
wor
k w
ith
thre
e be
ams
and
cont
roll
ed N
eum
ann
knot
[1
53]
E
PAR
_SIN
A
2 84
2
0 0
Par
abol
ic
PD
E w
ith
inho
mog
eneo
us
sinu
s-te
rm
(wit
h al
gebr
aic
[357
], [3
41]
X
equa
tion
) P
DA
E4
2 6
2 0
0 Si
mpl
e fo
urth
-ord
er P
DA
E w
ith
exac
t so
luti
on
X
PL
AS
MA
3
20
4 2
0 0
Spa
ce-t
ime
mov
emen
t of
ions
and
ele
ctro
ns
[272
] U
5 :<;
PR
ES
SU
RE
3
15
3 0
0 P
ress
ure-
driv
en f
low
in
poro
us m
edia
[2
66]
U5
~ T
UN
NE
L
2 24
2
0 0
Tun
nel
furn
ace
wit
h he
atin
g an
d co
olin
g se
ctio
n [3
07]
Ul
~ U
NL
BE
AM
2
10
5 3
0 0
Thi
n un
ifor
m c
anti
leve
red
beam
[1
62]
U5
,....,
VIE
-BE
AM
6
6 3
1 0
0 B
ound
ary
cont
rol
of tr
ansv
erse
vib
rati
ons
of a
bea
m
[26]
E
f2 t-<
~ ~ ~ "":l ~ ~ Q :;;: tl ~ ::..: t5 f2 t-<
U:l ~ t;5 ~

Appendix C The PCOMP Language
All model functions of the test problems in the EASY-FIT database are implemented in PCOMP, a special Fortran-similar modeling language allowing automatic differentiation, see Dobmann et al. [lO5, 106] for details. Data, variables, and functions defining the mathematical model must be written on a text file and are parsed and precompiled internally before starting the optimization cycle. Starting from the generated intermediate code, function and gradient values are evaluated during run time. Particular advantage is that gradients, as far as needed, are calculated automatically without any numerical approximation errors, sec also Section 8 of Chapter 2.
Declaration and executable statements must satisfy the usual Fortran input format and have to begin at column 7 or later. A statement line is read in until column 72. Comments beginning with C in the first column may be included in a program text wherever needed. Statements are continued on subsequent lines by adding a continuation mark in the 6th column. Either capital or small letters are allowed for identifiers of the user and key words of the language. Variables awl functions must be declared separately only if they are used for automatic differentiation. PCOMP possesses special constructs to identify program blocks.
* PARAMETER Declaration of constant integer parameters to be used throughout the program, particularly for dimensioning index sets.
* SET OF INDICES Definition of index sets that can be used to declare data, variables and functions or to define sum or prod statements.
* INDEX Definition of an index variable. which can be used in a FUNCTION program block.
* REAL CONSTANT Definition of real constants, either without index or with one- or two-dimensional index. An index may be a variable or a constant number within an index set. Arithmetic expressions can be included.
* INTEGER CONSTANT Definition of integer constants, either without index or with one- or two-dimensional index. An index may be a variable or a constant number of an index set. Arithmetic integer expressions are allowed.
* TABLE <identifier> Assignment of constant real numbers to one- or two-dimensional array elements. In subsequent lines, one has to specify one or two indices followed by one real value per line in a free format (starting at column 7 or later).
335

336 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
* VARIABLE Declaration of variables, also indexed, with respect to which automatic differentiation is to be performed.
* CONINT <identifier> Declaration of a piecewise constant interpolation function.
* LININT <identifier> Declaration of a piecewise linear interpolation function.
* SPLINE <identifier> Declaration of a spline interpolation function.
* MACRO <identifier> Definition of a macro, an arbitrary set of PCOMP statements that define an auxiliary function to be inserted into subsequent declaration blocks. Macros are identified by a name to be used in any right-hand side of an assignment statement.
* FUNCTION <identifier> Declaration of functions, also indexed, for which function and derivative values are to be evaluated. The subsequent statements must assign a numerical value to the function identifier.
* END End of the program.
We recommend following the order of the above program blocks. They may be repeated whenever desirable. Data must be defined before their first usage in a subsequent block. All lines after the final END statement are ignored by PCOMP. Statements within program blocks are very similar to usual Fortran notation and must satisfy the following guidelines.
Constant data: For defining real numbers either in analytical expressions or within the special constant data definition block, the usual Fortran convention can be used. In particular the E- or D-format is allowed.
Identifier names: Names of identifiers, e.g., for variables and functions, index sets and constant data, must begin with a letter. The number of characters, letters, digits, and underscores, must not exceed 20.
Index sets: Index sets are required for the SUM and PROD expressions and for defining indexed data, variables and functions. They can be defined in different ways:
1 Range of indices, e.g.,
ind1 = 1. .27
2 Set of indices, e.g.,
ind2 = 3,1,17,27,20
3 Computed index sets, e.g.,
ind3 = 5*i + 100 , i=l .. n
4 Parameterized index sets, e.g.,
ind4 = n .. m

APPENDIX C: Appendix C: The PCOMP Language 337
Assignment statements: As in Fortran, assignment statements are used to pass a numerical value to an identifier, which may be either the name of the function that is to be defined, or of an auxiliary variable that is used in subsequent expressions, e.g.,
rl xl*x4 + x2*x4 + x3*x2 - 11 r2 xl + 10*x2 - x3 + x4 + x2*x4*(x3 - xl) f rl**2 + r2**2
Analytical expressions: An analytical expression is, as in Fortran, any allowed combination of constant data, identifiers, elementary or intrinsic arithmetic operations and the special SUM- and PRoDstatements. Elementary operations are
+ , - , * , / , **
Note that PCOMP handles integer expressions in exponents in the same way as real expressions, i.e., one should avoid non-positive arguments. Allowed intrinsic functions are
ABS, SIN, COS, TAN, ASIN, ACoS, ATAN, SINH, COSH TANH, ASINH, ACoSH, ATANH, EXP, LOG, LoGl0, SQRT
Alternatively, the corresponding donble precision Fortran names possessing an initial D can be used as well. Brackets are allowed to combine groups of operations. Possible expressions are for example
5*DEXP(-z(i»
or
LoG(l + SQRT(cl*fl)**2)
INDEX-Variables: It is possible to define indices separately to avoid unnecessary differentiation of integer variables. They have to be defined in the program block INDEX. for example
* INDEX i,j 1
It. is allowed to manipulate the index by statements of the form
i = 1+2*4-3 i a(l) f a(i+2)+i*2.0 f SUM(a(m-i), m IN ind) f = i
f g(i)
In this case. a must be declared in the form of an integer array. However, the following assignment statements are not allowed, if b is a real array,
i = b(3) i = 1.0
i 4/2 Hi) = 3.0

338 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
Interpolation functions: PCOMP admits the interpolation of user-defined data, using either a piecewise constant, piecewise linear, or a cubic spline function. Given n pairs of real values (tl, Yl), ... , (tn, Yn), we are looking for a nonlinear function interpolating these data. In the first case, we define a piecewise constant interpolation by
oi') ~ {
0 , t < tl ,
Yi , ti S t < ti+l , i = 1, ... ,n -1 ,
Yn , tn S t
A continuous piecewise linear interpolation function is
l(t) = { :: + ti:~ ~iti (Yi+l - Yi)
Yn
, t < tl ,
,ti~t<ti+l, i=l, ... ,n-l,
,tnS;t,
and a cubic spline is given by
where p(t; h, t2, t3, t., Yl, Y2, Y3, Y.) is a cubic polynomial with
and s(t; tl, ... , tm, y" ... , Ym, y~, y;") a cubic spline function interpolating (tl, Yl)' ... , (tm, 11m) subject to the boundary conditions
d -(-t -t -t - - _f _f) -f . I d' diS i; 1,···, m'Yll···,Ym,YllYm =Yi' 'l= an t=m.
It is essential to understand that the constant and spline interpolation functions are not symmetric. Our main interest is to consider dynamical systems, for example ordinary or partial differential equations, where the initial value is set to 0 without loss of generality, leading to a non-symmetric domain. Moreover, interpolated data are often based on experiments that attain a steady state. Thus, a zero derivative is chosen at the right end-point for spline interpolation to facilitate the input of interpolated steady state data. On the other hand, any other conditions can be enforced by adding artificial interpolation data.
The spline functions generated are twice differentiable with the exception of the fourth break point. At this point, there exists only the first derivative and PCOMP generates the right-hand side differential quotient for the second derivative. We need at least four pairs of data to construct a spline interpolation as outlined above.
To give an example, we assume that we want to interpolate the nonlinear function f(t) given by the discrete values f(t;) = Yi from Table C.I, using the different techniques mentioned above. Interpolation functions are defined by a program block starting with the keyword CONINT for piecewise constant functions, LININT for piecewise linear functions, or SPLINE for piecewise cubic splines, followed by the name of the function. The numerical values of the break points and the function values are given in the subsequent lines, using any standard format starting at column 7 or later. Using piecewise constant approximations, we get for our example
* CONINT F 0.0 0.00

APPENDIX C: AppendiJ; C: The PCDMP Language 339
Table C.l. Experimental Plasma Data
1 2 3 4 5 6
ti Yi t, Yl,
0.0 0.00 7 6.0 l.73 l.0 4.91 8 7.0 l.39 2.0 4.43 9 8.0 l.16 3.0 3.57 10 9.0 l.04 4.0 2.80 11 10.0 1.00 5.0 2.19
1.0 4.91 2.0 4.43 3.0 3.57 4.0 2.80 5.0 2.19 6.0 1. 73 7.0 1.39 8.0 1.16 9.0 1.04 10.0 1.00
Within a function definition block. the interpolation functions are treated as intrinsic Fortran fnnctions and have to contain a variable or constant parameter. If we assume that t has previously been declared as a variable, a valid statement could look like
* FUNCTION Obj Obj = f(t)
The resulting approxinlations for piecewise constant functions, piecewise linear functions, or piecewise cubic splint' functions are depicted in Figures C.l to C.:l. vVhereas the cubic spline approximation is twice differentiable on the whole interval, the other two approximations are not differentiable at the break points and PCOMP uses the right-hand sided derivatives instead.
Macros: PCOMP does not allow the declaration of subroutines. However, it is possible to define macros, arbitrary sequences of PCOMP statements that define an auxiliary variable to be inserted into the beginning of subsequent function declaration blocks. l\-Iacros arc identified by a name that can be used in any right-hand side of an assignment statement
* MACRO (identifier)
followed by a group of PCOMP statements that assign a numerical value to the given identifier. This group of statements is inserted into the source code block that contains the macro name. Macros have no arguments, but they may access all variables, constants, or fundions that have been declared up to their first usage. Any values assigned to local variables within a macro, are also available outside in the corresponding function block.
If we assume that x is a variable and we want to define a macro that cumpute, the 'quare of x, we define for example
* MACRO sqr sqr = x*x
Now it i, possible to replace each occurrence of the term x*x by an invocation of the macro that we defined before, for example

340 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
4 10
Figure C.l. Piecewise Constant Interpolation
10
Figure C.2. Piecewise Linear Interpolation
f = sqr - 5.2
SUM- and PROD-expressions: Sums and products over predetermined index sets are formulated by SUM and PROD expressions, where the corresponding index and the index set must be specified, for example in the form
* FUNCTION f f = 100*PROD(x(i)**a(i), i IN inda)
In the above example, x(i) is a variable vector defined by an index set, and a(i) an array of constant data.

APPENDIX C: Appendix C: The PCOMP Language
o
o w
Figure C.3. Piecewise Cubic Spline Interpolation
Control statements: To control the execution of a program, the conditional statements
IF (condition) THEN
or
(statements) ENDIF
IF (condition) THEN (statements)
ELSE (statements)
ENDIF
341
can be inserted into a program. Conditions are defined as in Fortran by the comparative operators . EQ ., . NE ., . LE ., . LT ., . GE., . GT ., which can be combined using brackets and the logical operators .AND., . OR. and .NOT ..
The GOTO- and the CONTINUE-statements are further possibilities to control the execution of a program. The syntax for these statements is
GOTO (label)
and
(label) CONTINUE
where label has to be a number between 0 and 9999. The <label> part of the CONTINUE-statement must be located between columns 2 and 5 of an input line. Together with an index, the GOTO-statement can be used to simulate DO-loops, for example, which are forbidden in PCOMP, for examp~in the form
i = 1 s = 0.0
6000 CONTINUE s = s + a(i)*b(i) i = i+i IF (i.LE.n) THEN
GOTO 6000 ENDIF

342 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
Whenever indices are used within arithmetic expressions, it is allowed to insert polynomial expressions of indices from a given set. However, functions must be treated in a particular way. Since the design goal is to generate short, efficient Fortran codes, indexed function names can be used only in exactly the same way as defined. In other words, if a set of functions is declared by
* FUNCTION f(i), i IN index
then only an access to Hi) is allowed, not to f (1) or f (j), for example. PCOMP does not extend indexed functions to a sequence of single expressions similar to the treatment of SUM and PROD statements.
In PCOMP, it is allowed to pass variable values from one function block to the other. However, the user must be aware of a possible failure, if the evaluation of a gradient value in the first block is skipped in the calling program. One should be very careful when using the conditional statement IF. Possible traps that prevent correct differentiation are reported in Fischer [136] and are illustrated by an example. Consider the function f(x) = x 2 for n = 1. A syntactically correct formulation is
IF (x.EQ.l) THEN f = 1
ELSE f = x**2
ENDIF
PCOMP would try to differentiate both branches of the conditional statement. If x is equal to 1, the derivative value of f is 0, otherwise 2x. Obviously, we get a wrong answer for x = 1. This is a basic drawback for all automatic differentiation algorithms of the type we are considering.
A frequently needed computational value is the integral over the spatial variable x in case of a PDE model,
l:j ui(p, x, t)dx x j _ 1
where the integral is taken over the j-th area where the PDE is defined, j = 1, ... , na. Index i denotes the i-th solution component we want to integrate, i = 1, ... , np. The integral is evaluated by Simpson's rule and denoted by
SIMPSN(I,J)
in the PCOMP language. This name can be inserted in an arithmetic expression, for example to compute a fitting criterion. The corresponding time value is either a measurement value or an intermediate value needed for generating plot data.
PCOMP reports error messages in the form of integer values and, whenever possible, also corresponding line numbers. The corresponding explanations are listed in Table C.2.

APPENDIX C: Appendix C: The PCOMP Language 343
Table C.2. Error Messages of PCOMP
no. error message file not found
2 file too long 3 identifier expected 4 multiple definition of identifier 5 comma expected 6 left bracket expected 7 identifier not declared 8 data types do not fit together 9 division by zero
10 constant expected 11 operator expected 12 unexpected end of file 13 range operator ' . .' expected 14 right bracket ')' expected 15 'THEN' expected 16 'ELSE' expected 17 'ENDIF' expected 18 'THEN' without corresponding 'IF' 19 'ELSE' without corresponding 'IF' 20 'ENDIF' without corresponding 'IF' 21 assignment operator '=' expected 22 wrong format for integer number 23 wrong format for real number 24 formula too complicated 25 error in arithmetic expression 26 internal compiler error 27 identifier not valid 28 unknown type identifier 29 wrong input sign 30 stack overflow of parser 31 syntax error 32 available memory exceeded 33 index or index set not allowed 34 error during dynamic storage allocation 35 wrong number of indices 36 wrong number of arguments 37 too many index sets 38 too many integer constants 39 too many real constants 40 too many variables 41 too many functions 42 too many index variables 43 number of variables different from declaration 44 number of functions different from declaration 45 END - sign not allowed
continued

344
no. 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71
NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
error message Fortran code exceeds line domain error of exponential function bad input format length of working array IWA too small length of working array WA too small ATANH: domain error LOG: domain error SQRT: domain error ASIN: domain error ACOS: domain error ACOSH: domain error multiple declaration of label label not found wrong index expression wrong call of subroutine SYMINP wrong call of subroutine SYMPRP compilation of source file in GRAD-mode wrong order of interpolation values insufficient memory for interpolation in REVCDE length of working array IWA in SYMFOR too small insufficient interpolation values compilation of source file not in GRAD-mode missing macro name too many macros defined too many lines in macro declaration too many statements in function declaration

Appendix D Generation of Fortran Code
1. Model Equations Model functions of the test examples are defined in the PCOMP language. The meaning of variables
and functions is fixed by their serial order. Identifiers can be chosen arbitrarily.
1.1 Input of Explicit Model Functions To define model variables and explicit fitting functions in the PCOMP syntax, one has to follow certain
guidelines for the declaration of parameters and functions, since the order in which these items are defined is essential for the interface between the input file and the data fitting code. For defining variables, we need the following rules:
The first variable names are identifiers for the n independent parameters to be estimated, Le., for p" ... , Pn.
2 If a so-called concentration variable c exists, then a corresponding variable name must be added next.
3 The last variable name identifies the independent time variable t for which measurements are available.
4 No other variables are allowed to be declared.
Similarly, we have rules for the sequence by which model functions are defined:
First, r fitting criteria h,(p, t, c), ... , hr(P, t, c) must be defined depending on p, t, and optionally on c.
2 The subsequent mr functions are the constraints 9'(P), ... , 9mr(P)' if they exist at all. They may depend only on the parameter vector p to be estimated.
3 No other functions are allowed to be declared.
In addition to variables and functions, a user may insert further real or integer constants in the function input file according to the syntax rules of PCOMP.
EXAMPLE: To illustrate the usage of symbolic function input, we consider an example. We have two explicit model functions
h, (p, t)
h2(P, t)
Dexp(-k,t) ,
k,D -k k (exp(-k2t) - exp(-k,t)) ,- 2
The corresponding input file is the following one:
345

346 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
C--------------------------------------------------------C C Problem: LKIN_X C C--------------------------------------------------------C
VARIABLE kl. k2. O. t
C
FUNCTION hi hi - O*EXP(-k1*t)
C FUNCTION h2 h2 = kl*O/(kl - k2)*(EXP(-k2*t) - EXP(-kl*t))
C END
C
1.2 Input of Laplace Transformations The input of variables and Laplace functions is very similar to the input of explicit model functions.
Variables are:
The first variable names are identifiers for the n independent parameters to be estimated, PI, ... , Pn.
2 If a concentration variable exists, then a variable name must be added next that represents the concentration variable c.
3 The last variable name identifies the independent variable s in the Laplace space that corresponds to the time variable t after back-transformation, for which measurements are available.
4 No other variables are allowed to be declared.
Since constraints are not allowed, the only functions that can be declared are T fitting criteria formulated as functions in the Laplace space, any functions Hk(p, s, c) for k = 1, ... , T, depending on P, sand c. No other functions are permitted. These functions are then transformed back to the original variable space in the time variable t.
EXAMPLE: To illustrate the usage of function input in the Laplace space, we consider
D Yl(S) = -k- ,
S+ I
The functions are the Laplace transforms of two simple linear differential equations. If measurements are given for both functions, we define a model function file in the following way:
C-------------------------------------------------------C C Problem: LKIN_L C C-------------------------------------------------------C
VARIABLE kl. k2. D, s
C FUNCTION Y1 Y1 = 0/(8 + kl)
C
FUNCTION Y2 Y2 = k1*O/«s + kl)*(s + k2))
C END
C

APPENDIX D: Appendix D: Generation of Fortran Code 347
1.3 Input of Systems of Steady State Equations In this case, our system variables must be declared in the following order:
The first n names identify the n independent parameters to be estimated, P1, ... , Pn.
2 The subsequent m identifiers define state variables of the system of nonlinear equations, Zl, ... , Zm.
3 If a so-called concentration variable c exists, a corresponding variable name must be added next.
4 The last name identifies the independent time variable t, for which measurements are available.
5 No other variables are allowed to be declared.
Model functions defining the algebraic equations, constraints, and fitting criteria are defined as follows:
The first m functions are the right-hand sides of the steady state equations, 81 (p, Z, t, c), ... , 8 m (p, Z, t, c).
2 The subsequent m functions define starting values for solving the system of equations, which may depend on the parameters to be estimated, on the time variable, and eventually also on the concentration variable, z~(p, t, c), ... , z:!,(p, t, c).
3 Next, r fitting functions h1(P,Z,t,c), ... , hr(p,z,t,c) must be defined depending on p, z, t, and c, where z denotes the state variables.
4 The final mr functions are the constraints 9j(P) for j = 1, ... , mr, if they are present in the model, depending on the parameter vector p to be estimated.
5 No other functions are allowed to be declared.
In addition to variables and functions, a user may insert further real or integer constants in the function input file according to the guidelines of the language.
EXAMPLE: We consider a simple example that is related to a receptor-ligand binding study with one receptor and two ligands. The system of equations is given in the form
Zl(1 + P1Z2 + P2Z3) - P3 0
z2(1 + P1zI) - P4 0
z3(1+p2zI)-t 0
State variables are Zl, Z2, and Z3. The parameters to be estimated are P1, P2, P3 and P4, i.e., m = 3 and n = 4. t is the independent model or time variable to be replaced by experimental data. The fitting criterion is h(p, z, t) = P4 - Z2 and we use the starting values z~ = P3, zg = P4 and zR = t for solving the system of nonlinear equations.
c-------------------------------------------------------
Problem: DYN_EQ
c-------------------------------------------------------
C
VARIABLE pl. p2, p3, p4. zl, z2, z3, t
FUNCTION gl g1 "" z1*(1 + pl*z2 + p2*z3) - p3
FUNCTION g2 g2 = z2*(1 + pl*zl) - p4
FUNCTION g3 g3 = z3*(1 + p2*zl) - t
FUNCTION zl_O zLO ,.. p3

348 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
FUNCTION z2_0 z2_0 = p4
C FUNCTION z3_0 z3_0 ... t
C FUNCTION h h-p4-z2
C END
C
1.4 Input of Ordinary Differential Equations For defining variables, we need the following rules:
The first variables are identifiers for the n independent parameters to be estimated, Pl, ... , pn.
2 The subsequent s names identify the state variables of the system of ordinary differential equations, YI, ... , Ym·
3 If a concentration variable exists, then an identifier name must be added next that represents c.
4 The last variable name identifies the independent time variable t, for which measurements are available.
5 No other variables are allowed to be declared.
Similarly, we have rules for the sequence by which model functions are to be defined:
The first m functions are the right-hand sides of the system of differential equations, the functions F,(p,y,t,c), ... , FTn(p,y,t,c).
2 The subsequent m functions define the initial values, which may depend on the parameters to be estimated, and the concentration variable, y~(p, c), ... , y!(p, c).
3 Next, r fitting functions h, (p, y, t, c), ... , hr(p, y, t, c) are defined depending on p, y, t, and c, where y denotes the state variable of the system of differential equations.
4 The final mr functions are the constraints gj(P) for j = 1, ... , m r , if they exist at all, depending on the parameter vector p to be estimated.
5 No other functions are allowed to be declared.
The last nb of the n parameters to be estimated are considered as switching points, if they have been declared to describe certain model changes. Also nb, the number of constant or variable break points, must be defined a priori. In addition to variables and functions, a user may insert further real or integer constants in the function input file according to the guidelines of the language PCOMP.
EXAMPLE: The example was introduced in Section 5 of Chapter 2. Although an explicit solution is easily obtained, we show here a possible implementation to illustrate the input of differential equations. The system is given by two equations of the form
Yl(O) = D ,
Y2(O) = 0 .
We assume that experimental data are available for both state functions Yl(t) and Y2(t), and define the corresponding PCOMP code as follows:
c--------------------------------------------------c C Problem: LKIN C c---------------------------------------------------C
VARIABLE

APPENDIX D: Appendix D: Generation of Fortran Code
C
C
C
C
C
C
C
kl, k2, D, yl, y2, t
FUNCTION yl_ t yl_t - -kl*yl
FUNCTION y2_ t y2_ t • kl*yl - k2*y2
FUNCTION yl_0 yl_0 = D
FUNCTION hI h1 = yl
FUNCTION h2 h2 = y2
END
1. 5 Input of Differential Algebraic Equations The following order of PCOMP variables is required:
The first variable names are identifiers for n parameters to be estimated, PI, ... , Pn.
2 The subsequent md names identify the differential variables Yl, ... , Ymd'
3 The subsequent ma names identify the algebraic variables ZI, ... , zma'
4 If a concentration variable exists, another identifier must be added next to represent c.
349
5 The last variable name defines the independent time variable t for which measurements are available.
6 No other variables are allowed to be declared.
Similarly, we have rules for the sequence by which the model functions are defined:
The first md functions define the differential equations, F,(p,y,z,t,c), ... , Fmd(p,y,z,t,c).
2 The subsequent ma functions are the right-hand sides of the algebraic equations, i.e., the functions G,(p,y,z,t,c), ... , Gma(p,y,z,t,c).
3 Subsequently, md functions define initial values for the differential equations, which may depend on the parameters to be estimated, and the concentration variable, y~(p, c), ... , y~d (p, c).
4 Then ma functions define initial values for the algebraic equations, which may depend on the parameters to be estimated, and the concentration variable, z~(p, c), ... , z~a (p, c).
5 Next r fitting functions h, (p, y, z, t, c), ... , hr(p, y, z, t, c) must be defined depending on p, y, z, t, and c, where y and z are the differential and algebraic state variables of the DAE.
6 The final mr functions are the constraints gj(p), j = 1, ... , m r , if they exist. They may depend on the parameter vector p to be estimated.
7 No other functions are allowed to be declared.
The last nb fitting variables are considered as switching points, if they have been declared a priori to describe certain model changes. In addition to variables and functions, a user may insert further real or integer constauts in the function input file according to the guidelines of the language PCOMP.
EXAMPLE: We consider a modification of van der Pol's equation given in the form
if = z, y = a(1 - y2)Z .

350 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
We choose the consistent initial values
yO = b, ZO = b/(a(l _ b2 ))
and consider a and b as parameters to be estimated. The fitting criteria are the solutions yet) and z(t). The model input file has the following structure:
C--------------------------------------------------C C Problem: VDPOL C C--------------------------------------------------C
C
C
C
C
C
C
C
C
VARIABLE a,b.y,z,t
FUNCTION alg_equ alg_equ '" y - a*(l - y**2)*z
FUNCTION yO yO = b
FUNCTION zO zO = b/(a*(1 - bOb»~
FUNCTION h1 h1 = Y
FUNCTION h2 h2 ... Z
END
1.6 Input of Time-Dependent Partial Differential Equations For defining variables, we need the following rules:
The first variable names identify the n independent parameters to be estimated, Pi, ... , Pn.
2 The subsequent names specify the state variables of the partial differential equations, Ul, ... , unp '
3 In a similar way, the names of the corresponding variables denoting the first and second spatial derivatives are to be declared in this order, UI X1 .'0' unpx and Ul xx ) "0' unpxx '
4 Next, the names of nc state variables belonging to coupled ordinary differential equations must be defined, VI, ... , vnc'
5 If flux functions are to be inserted into the right-hand side formulation of the PDE, then np identifiers for the flux and their spatial derivatives are to be given, !l, ... , Inp and !lx, ... , Inpx '
6 Then a name is to be defined for the space or spatial variable x.
7 The last name identifies the independent time variable t for which measurements are available.
8 No other variables are allowed to be declared.
In a similar way, we have rules for the sequence by which the model functions are defined:
If flux functions are to be used, then manp functions It(p, u, u"" x, t), ... , I~p(p, u, u"', x, t) defining the flux must be inserted, one set for each integration area, i = 1, ... , rna. They may depend on x, t, u, U"', and p. When evaluating the right-hand side of model equations subsequently, the values of these flux functions and their derivatives are passed to the identifier names and corresponding derivative variables declared in the variable section of the input file as outlined above.

APPENDIX D: Appendix D: Generation of Fortran Code 351
2 Model functions defining the right-hand side of the partial differential equations
Fl(p, Ii, f;, u, U x ) Uxx, V, x, t), ... , F~p (p, Ii, f;, u, U X ) U XX ) V, X, t)
are defined next, one set for each integration area, i = 1, ... , mao Each function may depend on x, t, v, u, U x , Uxx, P, and, optionally, also on the flux functions and their derivatives. In this case, the corresponding identifiers for fluxes and their derivatives, as specified in the variable section, must be used in the right-hand side.
3 The corresponding initial values at time 0 are set next, ub(P,x), i = 1, ... , mao They depend on x and P, and are given for each integration area separately.
4 Next, the nc coupled differential equations must be defined in the order given by the series of coupling points, i.e., functions Gj(p, u, U x , U xx , v, t), j = 1, ... , n c , where the state variable U is evaluated at a given discretization line together with its first and second spatial derivatives.
5 Then initial values of the coupled ordinary equations at time 0 are defined, vb(P), j = 1, ... , nco
6 Subsequently, nb Dirichlet transition and boundary conditions are set in the order given by the area data, first left, then right boundary functions Cl(p, u, v, t), ... , cnb(p, U, v, t), where function values of U at the left or right end point of an integration area are inserted.
7 Neumann transition and boundary conditions for spatial derivatives follow in the order given by the area data, Cl(p, u, U x , v, t), ... , cnb(p, u, u x , v, t). Again, the function values of U or U x at a suitable end point of an integration area are inserted.
8 Moreover, r fitting criteria must be defined; any functions h1 (p, U, U X1 U XX ) v, t), .. "' hr(P, u, U X ) uxx , v, t), where U is defined at the corresponding spatial fitting point.
9 The final mr functions are the constraints g1 (p), ... , gmT (p), if they exist. They may depend on the parameter vector P to be estimated.
10 No other functions are allowed to be declared.
In addition, a user may insert further real or integer constants in the function input file according to the guidelines of PCOMP.
EXAMPLE: We consider a simple example, where Fourier's first law for heat conduction leads to the equation
Ut = U xx
defined for 0 < t <::; 0.5 and 0 < x < 1. Boundary conditions are
U(O, t) = u(1, t) = 0
for 0 <::; t <::; 0.5 and the initial values are
U(x,O) = sin (7) for 0 < x < 1 and 0 <::; L <::; 1. In addition, we are interested in the total amount of heat at the surface x = 0 given by the equation
with initial heat k·L
Vo= --7r
Function v serves also as our fitting criterion. Parameters to be estimated are Land k. The corresponding PCOMP input file is:
c--------------------------------------------------

352
C C
NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
Problem: HEAT
C--------------------------------------------------C
C
C
C
C
C
C
C
C
C
C
REAL CONSTANT pi = 3.1415926535
VARIABLE L. k, u, u_x, u_xx, v. x, t
FUNCTION u_ t u_t "" u_xx
FUNCTION uO uO = DSIN(pi*x/L)
FUNCTION v_t v_t = -k*pi/L*DEXP(-(pi/L)"2*t)
FUNCTION vO vO = k*L/pi
FUNCTION u_left u_left = 0
FUNCTION u_right u_right "" 0
FUNCTION h h = v
END
1. 7 Input of Partial Differential Algebraic Equations Very similar to the definition of data fitting problems based on partial differential equations outlined
in the previous section, we have to define fitting criteria, differential equations, initial and boundary conditions, coupling and transition equations and constraints in a suitable format. For defining variables, we need the following rules:
The first names are the identifiers for n independent parameters to be estimated, PI, ... , pn.
2 The subsequent names identify the np state variables of the system, UI, ... , u np , where first the differential, then the algebraic variables must be listed.
3 In a similar way, the corresponding variables denoting the first and second spatial derivatives of differential and algebraic variables are to be declared in this order, Ul x , ... , unpx and Ul xx , ... , U nPXX .
4 Next, names of nc variables belonging to coupled differential algebraic equations are defined, V" ... , Vnc ' where first the differential, then the algebraic variables must be given.
5 If flux functions are to be inserted into the right-hand side formulation of the PDAE, then np identifiers for the fluxes and their spatial derivatives are given, II, ... , fn p and fIx, ... , fnpx '
6 Then a name is to be defined for the space or spatial variable x.
7 The last name identifies the independent time variable t for which measurements are available.
8 No other variables are allowed to be declared.
Model functions are defined in the following format:
1 If flux functions are to be used, then manp functions Jl(P, u, U x , x, t), ... , f~p (p, u, U x , x, t) defining the flux are inserted, one set for each integration area, i = 1, ... , mao They may depend on x, t, u, u x ,
and p.

APPENDIX D: Appendix D: Generation of Fortran Code 353
2 Functions for the right-hand side of partial differential equations
Fi(p, Ii, f!, u, U x , v, x, t), ... , F~p(p, Ii, f!, u, U X ) V, X, t)
are defined next, one set for each integration area, i = 1, ... , mao Each function may depend on x, t, v, u, u"" u"'''', p, and, optionally, also on the flux functions and their derivatives. First, the differential equations, then the algebraic equations must be defined.
3 Then corresponding initial values at time 0 must be set, u5(p, x), i = 1, ... , ma, where first initial values for the differential and then for the algebraic equations must be declared. They depend on x and p, and are given for each integration area separately.
4 Next, nc coupled differential equations followed by the coupled algebraic equations are specified in the order given by the series of coupling points, i.e., the functions Gj(p,u,u""U",x, v,t), j = 1, ... , nc, where the state variable u is evaluated at a given discretization line together with its first and second spatial derivatives.
5 The corresponding initial values of the coupled ordinary differential algebraic equations at time 0 must be defined, v6(p), j = 1, ... , nc, in the same order.
6 Then nb Dirichlet transition and boundary conditions must be set in the order given by the area data, first left, then right boundary, Cl(P,U,V,t), ... , cnb(p,u,v,t), where function values ofu at the left or right end point of an integration area are inserted.
7 Subsequently, transition and boundary conditions for spatial derivatives must be defined in the order given by the area data, i.e., the functions Cl(P,U,ux ,v,t), ... , cnb(p,u,ux,v,t). Again, the function values of u or U x at a suitable end point of an integration area are inserted.
8 Moreover, r fitting criteria have to be given, any functions h1 (p, u, U x , U xx , v, t), .. 0, hr(p, u, ux, U XX1 V, t). 'u is defined at the corresponding spatial fitting point.
9 The final me functions are the constraints 91(P), ... , 9mr(P), if they exist. They may depend on the parameter vector p to be estimated.
10 No other functions are allowed to be declared.
Note that initial values for algebraic variables serve only as starting values for applying a nonlinear programming algorithm to compute consistent initial values of the discretized DAE system.
EXAMPLE: We consider a very simple fourth-order partial differential equation obtained from successive differentiation of u(x, t) = ae-,,4, sin(7fx) ,
Ut = -auxxxx
or, equivalently, two second-order differential algebraic equations
Ut -avxx ,
o v - U xx
defined for 0 :::: x :::: 1 and t ~ O. Initial values are u(x,O) = sin(7fx) and v(x,O) = _7f2 sin(7fx) and boundary values are u(O, t) = u(1, t) = v(O, t) = v(1, t) = 0 for all t ~ O. Function u is a possible fitting criterion and a an unknown parameter to be estimated from experimental data. The corresponding PCOMP input file is:
C--------------------------------------------------C C Problem: PDEA4 C
C--------------------------------------------------C
REAL CONSTANT pi = 3.1415926535

354
C
C
C
C
C
VARIABLE
FUNCTION u_ t u_ t '" -a*v _xx
FUNCTION alg_equ alg_ equ = v - u_xx
FUNCTION u_O u_O = sin(pi*x)
FUNCTION v_O v_O = -pi**2*sinCpi*x)
FUNCTION u_left u_left = 0
FUNCTION u_right u_right = 0
FUNCTION v _left v_left = 0
FUNCTION v _right v_right = 0
FUNCTION h h = u
END
NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS

APPENDIX D: Appendix D: Generation of Fortran Code 355
2. Execution of Generated Code Given a file CODE.FUN containing PCOMP code for function evaluation, the executable program
GEN_FOR.EXE parses the input file and generates Fortran subroutines for function and derivative evaluation in the most efficient reverse mode, see Section 8.2 of Chapter 2. GENYOR produces three output files
CODE.DAT two lines containing number of variables and functions found in CODE.FUN, CODE.SYM intermediate data of the parser (usually not needed), CODE. FOR generated Fortran codes for function and gradient evaluation.
The program GEN_FOR.EXE runs under Windows 95/98/NT/2000, but can be compiled easily for other operating systems, see Dobmann, Liepelt, and Schittkowski [105]. The corresponding Fortran source code routines are available through the ACM TOMS Library. The calling sequences of the generated subroutines are
XFUN (X,N,F,M,ACTIVE,IERR)
and
XGRA (X,N,F,M,DF,MMAX,ACTIVE,IERR),
where the meaning of the parameters is as follows:
X(N)
N F(M) M DF(MMAX,N)
MMAX ACTIVE(M)
lERR
Double precision array of length N that contains the variable values for which functions are to be evaluated. Dimension, i.e., number of variables. Double precision array of length M to pass function values to the user program. Total number of functions. Two-dimensional double precision array to pass gradient values computed by XGRA. The row dimension must be MMAX in the driving routine. Row dimension of DF. MMAX must not be smaller than M. Logical array of length M that determines the functions or gradients to be evaluated. ACTIVE must be set by the user when calling XFUN or XGRA, respectively: ACTIVE(J) = .TRUE. : Compute J-th function or gradient value. ACTIVE(J) = .FALSE. : Do not compute J-th function or gradient value. On return, IERR shows the termination reason of SYMFUN: IERR = 0 : Successful termination. IERR > 0 : There is an error in the input file, see Appendix C.
EXAMPLE: We consider a linear kinetic model that is described in the Laplace space consisting of two nonlinear functions only,
c-------------------------------------------------------c C Problem: LKIN_L C c-------------------------------------------------------
VARIABLE kl. k2. D. s
c FUNCTION Y1 Y1 = D/(s + kl)
FUNCTION Y2 Y2 • kl*D/ «s + kl)' (s + k2))
c END
c

356 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
The generated Fortran code is not supposed to become readable. If model functions are to be changed subsequently, we recommend altering PCOMP statements and executing GEN_FOR again.
C********************************* C
C PCOMP (Version 5.5) C
C********************************* C
C
C
C
SUBROUTINE XFUN (X, N , F , M, ACTIVE, IERR) INTEGER N,M DOUBLE PRECISION X(N) ,F(M) LOGICAL ACTIVE(M) INTEGER IERR
DOUBLE PRECISION XAUX(S:9) INTEGER 10, IXO INTEGER 11, IXl INTEGER I, OFS, IOFS
INTEGER VINDEX (1) INTEGER VICONS(1) DOUBLE PRECISION VRCONS(l) DATA (VINDEX(I), 1=1,1)
1 /0/ DATA (VICONS(I), 1=1,1)
1 /0/ DATA (VRCONS(I), 1-1,1)
1 /0.000000000000000000+00/
IXO=O IX1-0 IF (N .NE. 4) THEN IERR=43 RETURN
ENDIF IF (M .NE. 2) THEN IERR-44 RETURN ENDIF OFS-O IOFS=O IF (ACTIVE(l)) THEN XAUX(S)=X(4)+X(1) IF (XAUX(S) .EQ. 0.000) THEN IERR=9 RETURN ENDIF XAUX(6)-X(3)/XAUX(6) F(1)=XAUX(6) ENDIF IF (ACTIVE(2)) THEN XAUX (5) =X(1) oX (3) XAUX(6)=X(4)+X(2) XAUX(7)-X(4)+x(1) XAUX(8)-XAUX(6)oXAUX(7) IF (XAUX(8) .EQ. 0.000) THEN IERR=9 RETURN ENDIF XAUX (9) =XAUX(S)/XAUX(8) F(2)-XAUX(9) ENDIF RETURN END
SUBROUTINE XGRA (X, N , F , M, OF , MMAX, ACTIVE, IERR) INTEGER N,M,MMAX DOUBLE PRECISION X (N) , F (M) , OF (MMAX, N) LOGICAL ACTIVE(M) INTEGER IERR

APPENDIX D: Appendix D: Generation oj Fortran Code
DOUBLE PRECISION DFHELP(4)
DOUBLE PRECISION XAUX(S,9),YAUX(S,9) INTEGER 10, IXO INTEGER 11. IX 1 INTEGER INITl, INIT2 INTEGER I. OFS. IOFS
INTEGER VINDEX (1) INTEGER VICONS (1) DOUBLE PRECISION VRCONS (1) DATA (VINDEX(I), 1:1,1)
1 /0/ DATA (VICDNS(1), 1:1,1)
1 /0/ DATA (VRCDNS(I), 1:1,1)
1 /0. OOOOOOOOOOOOOOOOOD+OO/
CALL XINI(DF, 1 , MMAX, 4) IXO=O IX1:0 IF (N .NE. 4) THEN IERR=43 RETURN ENDIF IF (M .NE. 2) THEN IERR:44 RETURN ENDIF DFS:O IOFS:O IF (ACTIVE (1» THEN XAUX(S):X (4)+X(1) IF (XAUX (S) . EQ. O. ODO) THEN IERR:9 RETURN ENDIF XAUX(6):X (3) /XAUX (5) F(l):XAUX(6) DO 6 1:1,4 DFHELP (I) :DF (1,1) DF(l,I):O.ODO
6 CONTINUE DO 7 I:S,5 YAUX(1):O.ODO
7 CONTINUE YAUX(6):1.0DO IF (XAUX(5) .EQ. O.ODO) THEN IERR:9 RETURN ENDIF DF(1 ,3) :DF (1 ,3)+YAUX (6) /XAUX (S) YAUX (S) :YAUX (S) - YAUX (6) *X (3) /XAUX (5) **2 OF (1 ,4):DF(1 ,4) +YAUX(S) OF (1 , l):DF(l, 1) +YAUX(S) ENDIF IF (ACTIVE(2» THEN XAUX(S):X(l) *X(3) XAUX(6):X(4)+X(2) XAUX(7):X(4) +X(1) XAUX (8) :XAUX (6) *XAUX (7) IF (XAUX(8) .EQ. O.ODO) THEN IERR:9 RETURN ENDIF XAUX (9) :XAUX (S) /XAUX (8) F(2):XAUX(9) DO is 1:1,4 DFHELP(I):DF(2,1) DF(2,I):0.ODO
357

358
C
C
C
15 CONTINUE DO 16 1=5,8 YAUX(Il-O.ODO
lS CONTINUE YAUX(9)=1.0DO
NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
IF (XAUX(8) .EQ. O.ODO) TIIEN IERR=9 RETURN ENDIF YAUX (5)=YAUX(5) +YAUX(9) !XAUX(8) YAUX (8)=YAUX(8) -YAUX(9) *XAUX(5) !XAUX(8) **2 YAUX(S)=YAUX(S)+XAUX(7)*YAUX(8) YAUX (7) =YAUX (7) +XAUX(S) *YAUX(8) DF(2,4)-DF(2,4)+YAUX(7) DF(2,l)=DF(2,l)+YAUX(7) DF(2,4)=DF(2,4)+YAUX(S) DF(2,2)=DF(2,2)+YAUX(S) DF(2,l)-DF(2,l)+X(3)*YAUX(5) DF(2, 3)=DF(2 ,3) +X( 1) *YAUX(5) ENDIF RETURN END
SUBROUTINE XINI (G,ML,MU,N) INTEGER ML, MU ,N DOUBLE PRECISION G(ML,MU,N)
INTEGER I,J
DO 20 I=ML,MU DO 10 J=l,N G(I,J)-O.ODO
10 CONTINUE 20 CONTINUE
RETURN END

References
[lJ Abbott M.B., Minns A.W. (1998): Computational Hydmulics, Ashgatc, Aldershot
[2J Adjeriel S., Flaherty .I.E. (1986): A moving finite element method with error estimation and r-ej,nement JOT one-dimensiunal time dependent part'i(],l differential equations, SIAM Journal on Numerical Analysis. Vol. 23, 778-796
[3J Ahmed N.U., Teo K.L. (1981): Optimal Control of Distributed Pammeter Systems, Elsevier, Amsterdam
[4J Anderson D.H. (1983): Compa'rtmental Modeling and Tracer Kinetics, Lecture Notes in Biomathematics, Vol. 50, Springer, Berlin
[5J Andersson F., Olsson B. eds. (1985): Lake Giidsjon. An Acid For'est Lake and its Catchment, Ecological Bulletins, Vol. :n, Stockholm
[6J Argentine M., Coullet P. (1997): Chaotic nucleation of metastable domains, Physical Reviews E, Vol. 56, 2359-2:362
[7J Ascher U.M., Mattheij R., Russel R. (1995): NmneTrcal Solution of Bov.ndary Value Problems, SIAM, Philadelphia
[8J Ascher U.M .. Petzold L.R. (1998): Computer Methods for Ordinary Differ-ential Equations and Differential-Algebmic Equations, SIAM, Philadelphia
[9J Ascher U., Ruuth S., Wettin B. (1995): Implicit-explicit methods for time-dependent partial differential equations, SIAM Journal on Numerical Analysis, Vol. 32, 797-82:1
[lOJ Baake K, Schloeder J.P. (1992): Modelling the jast Jiuor'escence rate of phutosynthesis, Bulletin of Mathematical Biology, Vol. 54, 999-1021
[l1J Balsa-Canto E., Alonso A.A., Banga J.R. (2002): A novel, efficient and reliable method for thermal process design and optimization. Part I: Theory, Journal of Fooel Engineering, Vol. 52, 227-234
[12J Baba-Canto E., Banga J.R., Alonso A.A., Vassiliadis V.S. (1998): Optimal control of distributed pmcesses using restricted second order- information, Report, Chemical Engineering Lab., CSIC, University of Vigo, Spain
[1:1] Balsa-Canto K, Banga J.R., Alonso A.A., Vassiliadis V.S. (2001): Dynamic optimization of chemical and biochemical pmcesses uS'inq Testricted second-order information, Computers and Chemical Engineering, Vol. 25, 539-546
359

360 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
[14J Baltes M., Schneider R, Sturm C., Reuss M. (1994): Optimal experimental design for parameter estimation in unstructured growth models, Biotechnical Progress, Vol. 10, 480-488
[15J Banga J.R, Singh RP. (1994): Optimisation of air drying of foods, Journal of Food Engineering, Vol. 23, 189-221
[16J Banga J.R, Alonso A.A., Singh RP. (1997): Stochastic dynamic optimization of batch and semicontinuous bioprocesses, Biotechnology Progress, Vol. 13, 326-335
[17J Banga J.R, Versyck KJ., Van Impe J.F. (2002): Computation of optimal identification experiments for nonlinear dynamic process models: a stochastic global optimization apporoach, Journal of Industrial Engineering and Chemical Research, Vol. 41, 2425-2430
[18J Banks H.T., Crowley J.M., Kunisch K (1983): Cubic spline approximation techniques for parameter estimation in distributed systems, IEEE Transactions on Automatic Control, Vol. AC-28, No.7, 773-786
[19J Banks H.T, Kunisch K (1989): Estimation Techniques for Distributed Parameter Systems, Birkhauser, Boston, Basel, Berlin
[20J Bar M., Hegger R, Kantz H (1999): Fitting partial differential equations to space-time-dynamics, Physical Reviews E, Vol. 59, 337-342
[21J Bard Y. (1970): Conparison of gradient methods for the solution of nonlinear parameter estimation problems, SIAM Journal on Numerical Analysis, Vol. 7, 157-186
[22J Bard Y. (1974): Nonlinear Parameter Estimation, Academic Press, New York, London
[23J Bartholomew-Biggs M.C. (1995): Implementing and using a FORTRAN gO version of a subroutine for non-linear least squares calculations, Report, NOC, Hatfield
[24J Bauer 1., Bock H.G., Koerkel S., Schloeder J. (1999): Numerical methods for optimum experimental design, Report, IWR, University of Heidelberg
[25J Baumeister J. (1987): Stable Solution of Inverse Problems, Vieweg, Braunschweig
[26J Bazeze A., Bruch J.C., Sloss J.M. (1999): Numerical solution of the optimal boundary control of transverse vibrations of a beam, Numerical Methods for Partial Differential Equations, Vol. 15, No. 5, 558-568
[27J Beck J.V., Arnold KJ. (1977): Parameter Estimation in Engineering and Science, John Wiley, New York
[28J Bellman RE., Kalaba RE., Lockett J. (1966): Numerical Inversion of the Laplace Transform, American Elsevier, New York
[29J Belohlav Z., Zamostny P., Kluson P., Volf J. (1997): Application of a random-search algorithm for regression analysis of catalytic hydrogenizations, Canadian Journal of Chemical Engineering, Vol. 75,735-742
[30J Beltrami E. (1987): Mathematics for Dynamic Modeling, Academic Press, Orlando
[31J Benecke C. (1993): Interne numerische Differentiation von gewohnlichen Differentialgleichungen, Diploma Thesis, Dept. of Mathematics, University of Bayreuth, Germany
[32J Berzins M., Dew P.M. (1991): Algorithm 690: Chebyshev polynomial software for elliptic-parabolic systems of PDEs, ACM Transacions on Mathematical Software, Vol. 17, No.2, 178-206

REFERENCES 361
[33] Bethe H.A., Salpeter E.E. (1977): Quantum Mechanics of One- and Two-Electron Atoms, Plenum Press, New York
[34] Bettenhausen D. (1996): Automatische Struktursuche fUr Regier und Strecke, Fortschrittberichte VDI, Reihe 8, Nr. 474, VDI, Dusseldorf
[35] Betts J.T. (1997): Experience with a sparse nonlinear progmmming algorithm, in: Large Scale Optimization with Applications, Part II: Optimal Design and Control, L.T. Biegler, T.F. Coleman, A.R. Conn, F.N. Santos eds., Springer, Berlin
[36] Biegler L.T., Damiano J.J., Blau G.E. (1986): Nonlinear pammeter estimation: a case study comparison, AIChE Journal, Vol. 32, No.1, 29-45
[37] Bird H.A., Milliken G.A. (1976): Estimable functions in the nonlinear model, Communications of Statistical Theory and Methods, Vol. 15, 513-540
[38] Bird, R.B., Stewart W.E., Lightfoot E.N. (1960): Transport Phenomena, John Wiley, New York
[39] Birk J., Liepelt M., Schittkowski K., Vogel F. (1999): Computation of optimal feed mtes and operation intervals for turbular reactors, Journal of Process Control, Vol. 9, 325-336
[40] Bischof C., Carle A., Corliss G., Griewank A., Hovland P. (1992): ADIFOR: Genemting derivative codes from Fortmn programs, Scientific Programming, Vol. 1, No.1, 11-29
[41] Bjorck A. (1990): Least Squares Methods, Elsevier, Amsterdam
[42] Black F., Scholes M. (1973): The pricing of options and corpomte liabilities, Journal of Political Economics, Vol. 81, 637-659
[43] Blatt M., Schittkowski K. (2000): Optimal control of one-dimensional partial differential algebmic equations with applications, Annals of Operations Research, Vol. 98, 45-64
[44] Blom J.G., Zegeling P.A. (1994): Algorithm 731: A moving grid interface for systems of onedimensional time-dependent partial differential equations, ACM Transactions on Mathematical Software, Vol. 20, No.2, 194-214
[45] Bock H.G. (1978): Numerical solution of nonlinear multipoint boundary value problems with applications to optimal control, Zeitschrift fUr Angewandte Mathematik und Mechanik, Vol. 58, 407
[46] Bock H.G. (1983): Recent advantages in pammeter identification techniques for ODE, Proceedings of the International Workshop on Numerical Treatment of Inverse Problems in Differential and Integml Equations, Birkhauser, Boston, Basel, Berlin 95-121
[47] Bock H.G., Eich E., Schloder J.P. (1987): Numerical solution of constmined least squares problems in differential-algebmic equations, Proceedings of the Fourth Seminar NUMDIFF-4, Halle, Numerical Treatment of Differential Equations, Teubner-Texte zur Mathematik, Vol. 104, Teubner, Stuttgart
[48] Boderke P., Schittkowski K., Wolf M., Merkle H.P. (2000): A mathematical model for diffusion and concurrent metabolism in metabolically active tissue, Journal of Theoretical Biology, Vol. 204, No. 3, 393-407
[49] Bojkov B., Hansel R., Luus R. (1993): Application of direct search optimization to optimal control problems, Hungarian Journal of Industrial Chemistry, Vol. 21, 177-185
[50] Borggaard J., Burns J. (1997): A PDE sensitivity method for optimal aerodynamic design, Journal of Computational Physics, Vol. 136, No.2, 366-384

362 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
[51J Bossel H. (1992): Modellbildung und Simulation, Vieweg, Braunschweig
[52J Box G.P., Hunter w.e., MacGregor J.F., Erjavec J. (1973): Some problems associated with the analysis of multiresponse data, Technometrics, Vol. 15, 33-51
[53J Box G.P., Hunter W.G., Hunter J.S. (1978): Statistics for Experimenters, John Wiley, New York
[54J Bryson A.E., Denham W.F., Dreyfus S.E. (1963): Optimal progmmming problems with inequality constraints, AIAA Journal, Vol. 1, No. 11, 2544-2550
[55J Buchauer 0., Hiltmann P., Kiehl M. (1992): Sensitivity analysis of initial-value problems with applications to shooting techniques, DFG-SPP-Report No. 403, Mathematisches Institut, TU Miinchen
[56J Bulirsch R. (1971): Die Mehrzielmethode zur numerischen Losv,ng von nichtlinearen Randwertproblemen und Aufgaben der optimalen Steuerung, Technical Report, Carl-Cranz-Gesellschaft, Oberpfaffenhofen
[57J Bulirsch R., Kraft D. (1994): Computational Optimal Control, International Series of Numerical Mathematics, Vol. 111, Birkhiiuser, Boston, Basel, Berlin
[58J Butcher J.e. (1963): Coefficients for the Study of Runge-Kutta integration processes, Journal of the Australian Mathematical Society, Vol. 3, 185-201
[59J Butcher J.e. (1964): Integmtion processes based on Radau quadrature formulas, Mathematics of Computations, Vol. 18, 233-244
[60J Buwalda J.G., Ross G.J.S., Stribley D.B., Tinker P.B. (1982): The development of endomycorrhiza.l root systems, New Phytologist, Vol. 92, 391-399
[61J Buzzi-Ferraris G., Facchi G., Forzetti P., Troncani E. (1984): Control optimization of tubular catalytic decay, Industrial Engineering in Chemistry, Vol. 23, 126-131
[62J Buzzi-Ferraris G., Morbidelli M., Forzetti P., Carra S. (1984): Deactivation of eatalyst - mathematical models for the control and optimization of reactors, International Chemical Engineering, Vol. 24, 441-451
[63J Byrne G.D., Hindmarsh A.C. (1987): Stiff ODE solvers: A review of current and coming attractions, Journal of Computational Physics, Vol. 70, 1-62
[64J Caassen N., Barber S.A. (1976): Simulation model for' nutrient uptake from soil by a growing plant root system, Agronomy Journal, Vol. 68, 961-964
[65] Campbel J.H. (1976): Pyrolysis of sub bituminous coal as it relates to in situ gasification, Part 1: Gas evalution, Report UCRL-52035, Lawrence Livermore Lab., Livermore, USA
[66J Campbell S.L., Marszalek W. (1996): The index of an infinite dimensional implicit system, Mathematical Modelling of Systems, Vol. 1, No.1, 1-25
[67] Caracotsios M., Stewart W.E. (1985): Sensitivity analysis of initial value problems with mixed ODE's and algebraic equations, Computers and Chemical Engineering, Vol. 9, 359-365
[68J Caracotsios M., Stewart W.E. (1995): Sensitivity analysis of initial-boundaTy-value problems with mixed PDE's and algebraic equat'ions, Computers and Chemical Engineering, Vol. 19, 1019-1030
[69] Carrasco E.F., Banga J.R. (1998): A hybrid method for the optimal control of chemical processes, Report, Chemical Engineering Lab., CSIC, University of Vigo, Spain

REFERENCES 363
[70J Carasso C., Raviart P.-A., Serre D. eds. (1986): Nonlinear Hyperbolic Equations, Lecture Notes in Mathematics, No. 1270, Springer, Berlin
[71J Carasso C., Charrier P., Hanouzet B., Joly J.-L. (1989): Nonlinear Hyperbolic Equations, Lecture Notes in Mathematics, No. 1402, Springer, Berlin
[72J Carver M.B. (1978): Efficient integration over discontinuities in ordinary differential equation simulations, Mathematics of Computer Simulations, Vol. 20, 190-196
[73J Cash J.R., Karp A.H. (1990): A variable order Runge-Kutta method for Initial values: problems with rapidly varying right-hand sides, ACM Transactions on Mathematical Software, Vol. 16, No. 3, 201-222
[74J Chakravarthy S.R., Osher S. (1984): High resolution schemes and the entropy condition, SIAM Journal on Numerical Analysis, Vol. 21, No.5, 955-984
[75J Chakravarthy S.R., Osher S. (1984): Very high order accurate TVD schemes, ICASE Report No. 84-44
[76J Chakravarthy S.R., Osher S. (1985): Computing with high-resolution upwind schemes for hyperbolic equations, Lectures in Applied Mathematics, Vol. 22, 57-86, Springer, Berlin
[77J Chang K.S. (1978): Second-order computational methods for distributed parameter optimal control problems, in: Distributed Parameter Systems, W.H. Ray, D.G. Lainiotis eds., Marcel Dekker, New York, Basel, 47-134
[78J Chartres B.A., Stepleman R.S. (1976): Convergence of linear multistep methods for differential equations with discontinuities, Numerische Mathematik, Vol. 27, 1-10
[79J Chemburkar R.M., Morbidelli M., Varma A. (1986): Parametric sensitivity of a CSTR, Chemical Engineering Science, Vol. 41, 1647
[80J Chen J. (1991): Abkiihlungsvorgange von Stahlplatten mit Spritzwasserbeaufschlagung, Umformtechnische Schriften, Vol. 30
[81J Chen G., Mills W.H. (1981): Finite elements and terminal penalization for quadratic cost optimal control problems governed by ordinary differential equations, SIAM Journal on Control and Optimization, Vol. 19,744-764
[82J Cherruault Y. (1986): Explicit and numerical methods for finding optimal therapeutics, Mathema-tical Modelling, Vol. 7, 173-183
[83J Chicone C. (1999): Ordinary Differential Equations with Applications, Springer, New York
[84J Clark C. (1976): Mathematical Bioeconomics, Wiley-Interscience, New York
[85J Collatz L. (1960): The Numerical Treatment of Differential Equations, Springer, Berlin
[86J Collin R.E. (1991): Field Theory of Guided Waves, IEEE Press, New York
[87J Colombeau J.F., Le Roux (1986): Numerical techniques in elastoplasticity, in: Nonlinear Hyperbolic Problems, C. Carasso, P.-A. Raviart, D. Serre eds., Lecture Notes in Mathematics, No. 1270, Springer, Berlin
[88J Crank J. (1970): The Mathematics of Diffusion, Oxford at the Clarendon Press
[89J Cunge J.A., Holly F.M. (1980): Practical Aspects of Computational River Hydraulics, Pitman, Boston

364 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
[90J Cuthrell J.E., Biegler L.T. (1989): Simultaneous optimization nad solution methods for batch reactor control profiles, Computational Chemical Engineering, Vol. 13, 49-62
[91J Dahlquist G., Edsberg L., Sk611ermo G., S6derlind G. (1982): Are the numerical methods and software satisfactory for chemical kinetics?, in: Numerical Integration of Differential Equations and Large Linear Systems, J. Hinze ed., Springer, Berlin
[92J Daniel C., Wood F.S. (1980): Fitting Equations to Data, John Wiley, New York
[93J Davidian M., Giltinan D.M. (1995): Nonlinear Models for Repeated Measurement Data, Chapman and Hall, London
[94J Davis H.T. (1962): Introduction to Nonlinear Differential and Integral Equations, Dover, New York
[95J de Saint-Venant, B. (1871): Theorie du movement non-permanent des eaux avec application aux crues des rivieres et d l'introduction des marees dans leur lit, Comptes Rendus Academie des Sciences, Vol. 73, 148-154
[96J Denbigh KG. (1958): Optimum temperature sequence in reactors, Chemical Engineering Sciences, Vol. 8, 125-132
[97J Dennis J.E.jr. (1973): Some computational technique for the nonlinear least squares problem, in: Numerical Solution of Systems of Nonlinear Algebraic Equations, G.D. Byrne, C.A. Hall eds., Academic Press, New York, London
[98J Dennis J.E.jr. (1977): Nonlinear least squares, in: The State of the Art in Numerical Analysis, D. Jacobs ed., Academic Press, New York, London
[99J Dennis J.E.jr., Gay D.M., Welsch R.E. (1981): An adaptive nonlinear least-squares algorithm, ACM Transactions on Mathematical Software, Vol. 7, No.3, 348-368
[100J Dennis J.E.jr., Gay D.M., Welsch R.E. (1981): Algorithm 573: NL2S0L-An adaptive nonlinear least-squares algorithm, ACM Transactions on Mathematical Software, Vol. 7, No.3, 369-383
[101J Dennis J.E.jr., Heinkenschloss M., Vicente L.N. (1998): Trust-region interior-point SQP algorithm for a class of nonlinear programming problems, SIAM Journal on Control, Vol. 36, No.5, 1750-1794
[102J Deufihard P. (1979): A stepsize control for continuation methods with special applications to multiple shooting techniques, Numerische Mathematik, Vol. 33, 115-146
[103J Deufihard P., Apostolescu V. (1977): An underrelaxed Gauss-Newton method for equality constrained nonlinear least squares, Proceedings of the IFIP Conference on Optimization Techniques, Part 2, A.V. Balakrishnan, Thoma M. eds., Lecture Notes in Control and Information Sciences, Vol. 7, 22-32, Springer, Berlin
[104J Dietrich E.E., Eigenberger G. (1996): Compact finite difference methods for the solution of chemical engineering problems, in: Scientific Computing in Chemical Engineering, Keil, Mackens, Voss, Werther eds., Springer, Berlin
[105J Dobmann M., Liepelt M., Schittkowski K (1995): Algorithm 746: PCOMP: A Fortran code for automatic differentiation, ACM Transactions on Mathematical Software, Vol. 21, No.3, 233-266
[106J Dobmann M., Liepelt M., Schittkowski K, TraBl C. (1995): PCOMP: A Fortran code for automatic differentiation, language description and user's guide, Report, Dept. of Mathematics, University of Bayreuth, Germany

REFERENCES 365
[107] Dobmann M., Schittkowski K (1995): PDEFIT: A Fortmn code for constmined pammeter estimation in partial differential equations, - user's guide -, Report, Dept. of Mathematics, University of Bayreuth, Germany
[108] Dolan E.D., More J. (2001): Benchmarking optimization software with COPS, Technical Report ANL/MCS-246, Argonne National Laboratory, Mathematics and Computer Science Division, Argonne, Illinois
[109] Donaldson J.R., Schnabel R.B. (1987): Computational experience with confidence regions and confidence intervals for nonlinear least squares, Technometrics, Vol. 29, 67-82
[110] Donat R., Marquina A. (1996): Capturing shock reflections: An improved flux formula, Journal of Computational Physics, Vol. 25, 42-58
[111] Dormand J.R., Prince P.J. (1981): High order embedded Runge-Kutta formulae, Journal of Computational Applied Mathematics, Vol. 7, 67-75
[112] Dorondicyn A.A. (1947): Asymptotic solution of the van der Pol equation, Prikl. Mat. i Meh., Vol. 11, 313-328, Translations AMS Series 1, Vol. 4, 1-23
[113] Draper N.R., Smith H. (1981): Applied Regression Analysis, John Wiley, New York
[114] DuChateau P. (1995): An introduction to inverse problems in partial differential equations for engineers, physicists, and mathematicians, a tutorial, in: Proceedings of the Workshop on Parameter Identification and Inverse Problems in Hydrology, Geology, and Ecology, J. Gottlieb, P. DuChateau eds., Kluwer Academic Publishers, Dordrecht, Boston, London 3 - 50
[115] Dunn LJ., Heinzle E., Ingham J., Prenosil J.E. (1992): Biological Reaction Engineering, VCH, Weinheim
[116] Dwyer H.A., Sanders B.R. (1978): Numerical modeling of unsteady flame propagation, Acta Astronautica, Vol. 5, 1171-1184
[117] Edgar T.F., Himmelblau D.M. (1988): Optimization of Chemical Processes, McGraw Hill, New York
[118] Edgar T.F., Lapidus L. (1972): The computation of optimal singular bang-bang control II. Nonlinear systems, AIChE Journal, Vol. 18, 780-785
[119] Edsberg L., Wedin P.A. (1995): Numerical tools for pammeter estimation in ODE-systems, Optimization Methods and Software, Vol. 6, 193-218
[120] Ehrig R., Nowak U., Oeverdieck L., Deuflhard P. (1999): Advanced extmpolation methods for large scale differential algebmic problems, in: High Performance Scientific and Engineering Computing, H.-J. Bungartz, F. Durst, and Chr. Zenger (eds.), Lecture Notes in Computational Science and Engineering, Springer, Vol. 8, 233-244
[121] Eich-Soellner E., Fuhrer C. (1998): Numerical Methods in Multibody Dynamics, Teubner, Stuttgart
[122] Eigenberger G., Butt J.B. (1976): A modified Cmnk-Nocolson technique with non-equidistant space steps, Chemical Engineering Sciences, Vol. 31, 681-691
[123] Ekeland K, Owren B., Oines E. (1998): Stiffness detection and estimation of dominant spectm with explicit Runge-Kutta methods, ACM Transactions on Mathematical Software, Vol. 24, No.4, 368-382
[124] Elezgaray J., Arneodo A. (1992): Crisis induced intermittent bursting in reaction-diffusion chemical systems, Physical Reviews Letters, Vol. 68, 714-717

366 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
[125] Ellison D. (1981): Efficient automatic integmtion of ODEs with discontinuities, Mathematics of Computational Simulations, VoL 23, 12-20
[126] Elnagar G.N., Kazemi M.A. (1998): Pseudospectml Chebyshev optimal control of constmined nonlinear dynamical systems, Computational Optimization and Applications, VoL 11, No.2, 195-213
[127] Endrenyi, L. ed. (1981): Kinetic Data Analysis, Plenum Press, New York
[128] Engleborghs K., Lust K., Roose D. (1999): Direct computation of periodic doubling bifurcation points of large-scale systems of ODE's using a Newton-Picard method, IMA Journal of Numerical Analysis, VoL 19, 525-547
[129] Engquist, B. (1986): Computation of oscillatory solutions to partial differential equations, in: C. Carasso, P.-A. Raviart, D. Serre eds., Nonlinear Hyperbolic Problems, Lecture Notes in Mathematics, No. 1270, Springer, Berlin
[130] Enright W.H., Hull T.E. (1976): Comparing numerical methods for the solution of stiff systems of ODEs arising in chemistry, in: Numerical Methods for Differential Systems, L. Lapidus, W.E. Schiesser eds., Academic Press, New York, 45-66
[131] Farnia K. (1976): Computer-assisted experimental and analytical study of time/temperaturedependent thermal properties of the aluminium alloy 2024-T35l, Ph.D. Thesis, Dept. of Mechanical Engineering, Michigan State University
[132] Fedkiw R.P., Merriman B., Donat R., Osher S. (1996): The penultimate scheme for systems of conservation laws: Finite difference ENO with marquina's flux splitting, UCLA CAM Report No. 96-18, Dept. of Mathematics, University of California at Los-Angeles
[133] Feldman H.A. (1972): Mathematical theory of complex ligand-binding systems at equilibrium: Some methods for parameter fitting, Analytical Biochemistry, VoL 48, 317-338
[134] Fedorov V.V. (1972): Theory of Optimal Experiments, Academic Press, New York
[135] Fermi E., Ulam S., Pasta J. (1974): Studies of nonlinear problems I, in: Nonlinear Wave Motion, Lectures on Applied Mathematics, AMS, VoL 15, 143-155
[136] Fischer H. (1991): Special problems in automatic differentiation, in: Automatic Differentiation of Algorithms: Theory, Implementation and Application, A. Griewank, G. Corliss eds., SIAM, Philadelphia
[137] Fischer P. (1996): Modellierung und Simulation der Ammonium- und Nitrat-Dynamik in strukturierten Waldbiiden under besonderer Beriicksichtigung eines dynamischen, hierarchischen Wurzelsystems, Diploma Thesis, Dept. of Mathematics, University of Bayreuth, Germany
[138] Flaherty J .E., Moore P.K. (1995): Integmted space-time adaptive hp-refinement methods for parabolic methods, Applied Numerical Mathematics, VoL 16,317-341
[139] Fogler H.S. (1974): Elements of Chemical Kinetics and Reactor Calculations, Prentice Hall, Englewood Cliffs, NJ
[140] Fraley C. (1988): Software performance on nonlinear least-squares problems, Technical Report SOL 88-17, Dept. of Operations Research, Stanford University, Stanford, CA 94305-4022, USA
[141] Frias J.M., Oliveira J.C, Schittkowski K. (2001): Modelling of maltodextrin DE12 drying process in a convection oven, Applied Mathematical Modelling, VoL 24, 449-462

REFERENCES 367
[142J Friedman A., McLead B. (1986): Blow-up of solutions of nonlinear degenerate parabolic equations, Archive for Rational Mechanics and Analysis, Vol. 96, 55-80
[143J Fu P.-C, Barford J.P. (1993): Non-singular optimal control for fed-batch fermentation processes with a differential-algebraic system model, Journal on Process Control, Vol. 3, No.4, 211-218
[144J Fiihrer C. (1988): Differential-algebraische Gleichungssysteme in mechanischen Mehrkorpersystemen: Theorie, numerische Ansiitze und Anwendungen, Dissertation, Technical University of Munich
[145J Fiihrer C., Leimkuhler B. (1991): Numerical solution of differential-algebraic equations for constrained mechanical motion, Numerische Mathematik, Vol. 59, 55-69
[146J Fujita H. (1975): Foundations of Ultracentrifugical Analysis, John Wiley, New York
[147J Galer A.M., Crout N.M.J., Beresford N.A., Howard B.J., Mayes R.W., Barnett C.L., Eayres H., Lamb C.S. (1993): Dynamic radiocaesium distribution in sheep: measurement and modelling, Journal of Environmental Radiology, Vol. 20, 35-48
[148J Gallant A.R. (1975): Nonlinear Regression, American Statistics, Vol. 29, No.2, 73-81
[149J Gallant A.R. (1987): Nonlinear Statistical Models, John Wiley, New York
[150J Ganzha V.G., Vorozhtsov E.V. (1996): Numerical Solutions for Partial Differential Equations, CRC Press, Boca Raton, New York, London, Tokyo
[151J Gear C.W. (1990): Differential-algebraic equations, indices, and integral algebraic-equations, SIAM Journal on Numerical Analysis, Vol. 27, 1527-1534
[152J Gear C.W., Osterby O. (1984): Solving ordinary differential equations with discontinuities, ACM Transactions on Mathematical Software, Vol. 10, 23-44
[153J Geisler J. (1999): Dynamische Gebietszerlegung fUr Optimalsteuerungsprobleme auf vernetzten Gebieten unter Verwendung von Mehrgitterverfahren, Diploma Thesis, Dept. of Mathematics, University of Bayreuth, Germany
[154J Gibaldi M., Perrier D. (1982): Phamacokinetics, Marcel Dekker, New York, Basel
[155J Gill P.E., Murray W. (1978): Algorithms for the solution of the non-linear least-squares problem, SIAM Journal on Numerical Analysis, Vol. 15, 977-992
[156J Gill P.E., Murray W., Wright M.H. (1981): Practical Optimization, Academic Press, New York, London
[157J Gill P.E., Murray W., Saunders M., Wright M.H. (1983): User's Guide for SQL/NPSOL: A Fortran package for nonlinear programming, Report SOL 83-12, Dept. of Operations Research, Stanford University, California
[158J Godfrey K.R., DiStefano J.J. (1985): Identifiability of model parameters, in: IFAC Identification and System Parameter Estimation, P. Joung ed., Pergamon Press, Oxford, 89-114
[159J Goh C.J., Teo K.L. (1988): Control parametrization: A unified approach to optimal control problems with general constraints, Automatica, Vol. 24, 3-18
[160J Gonzales-Concepcion C., Pestano-Gabino C. (1999): Approximated solutions in rational form for systems of differential equations, Numerical Algorithms, Vol. 21, 185-203
[161J Goodman M.R. (1974): Study Notes in System Dynamics, Wright-Allen Press, Cambridge MA.

368 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
[162] Goodson R.E., Polis M.P. (1978): Identification of parameters in distributed systems, in: Distributed Parameter Systems, W.H. Ray, D.G. Lainiotis eds., Marcel Dekker, New York, Basel, 47-134
[163] Gottwald B.A., Wanner G. (1981): A reliable Rosenbrock integrator for stiff differential equations, Computing, Vo!' 26, No.2, 355-360
[164] Graf W.H. (1998): Fluvial Hydraulics, John Wiley, Chichester
[165] Gray P, Scott S.K. (1990): Chemical Oscillations and Instabilities, Clarenden Press
[166] Griewank A., Corliss G. (eds.) (1991): Automatic Differentiation of Algorithms: Theory, Implementation and Application, SIAM, Philadelphia
[167] Griewank A., Juedes D., Srinivasan J. (1991): ADOL-C: A package for the automatic differentiation of algorithms written in C/C++, Preprint MCS-PI80-1190, Mathematics and Computer Science Division, Argonne National Laboratory, Argonne, USA
[168] Griewank A. (1989): On automatic differentiation, in: Mathematical Programming: Recent Developments and Applications, M. lri, K. Tanabe eds., Kluwer Academic Publishers, Dordrecht, Boston, London, 83-107
[169] Groch A.G. (1990): Automatic control of laminar flow cooling in continuous and reversing hot strip mills, Iron and Steel Engineer, 16-20
[170] Gronwall T.H. (1919): Note on the derivatives with respect to a parameter of the solutions of a system of differential equations, Annals of Mathematics, Vo!' 20, 292-296
[171] Guckenheimer J., Holmes P. (1986): Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields, Springer, New York
[172] Gugat M., Leugering G., Schittkowski K., Schmidt E.J.P.G. (2001): Modelling, stabilization and control of flow in networks of open channels, in: Online Optimization of Large Scale Systems, M. Grotschel, S.O. Krumke, J. Rambau eds., Springer, Berlin, 251-270
[173] Gupta Y.P. (1995): Bracketing method for on-line solution for low-dimensional nonlinear algebraic equations, Industrial Engineering and Chemical Research, Vo!' 34, 536-544
[174] Guy R.H., Hadgraft J. (1988): Physicochemical aspects of percutaneous penetration and its enhancement, Pharmaceutical Research, Vo!' 5, No. 12, 753-758
[175] Haase G. (1990): Dynamische Simulation einer Destillationskolonne und Entwurf einer Regelung, Diploma Thesis, Berufsakademie Mannheim
[176] Hadgraft J. (1979): The epidermal reservoir, a theoretical approach, International Journal of Pharmaceutics, Vo!' 2, 265-274
[177] Hahn H. (1921): Theorie der reellen Ji'unktionen, Springer, Berlin
[178] Hairer E., Lubich C., Roche M. (1989): The Numerical Solution of Differential-Algebraic Systems by Runge-Kutta Methods, Lecture Notes in Mathematics, Vo!' 1409, Springer, Berlin
[179] Hairer E., N!2irsett S.P., Wanner G. (1993): Solving Ordinary Differential Equations I: Nonstiff Problems, Springer Series Computational Mathematics, Vo!' 8, Springer, Berlin
[180] Hairer E., Stoffer D. (1997): Rerversible long term integration with variable step sizes, SIAM Journal on Scientific Computing, Vo!. 10, 257-269

REFERENCES 369
[181) Hairer E., Wanner G. (1991): Solving Ordinary Differential Equations II. Stiff and DifferentialAlgebraic Problems, Springer Series Computational Mathematics, Vol. 14, Springer, Berlin
[182) Hamdi S., Gottlieb J.J., Hanson J.S. (2001): Numerical solutions of the equal width wave equation using an adaptive method of lines, in: Adaptive Methods of Lines, A. Vande Wouwer, Ph. Saucec Ph., W. Schiesser eds., Chapman and Hall/CRC, Boca Raton
[183) Han S.-P. (1976): Superlinearly convergent variable metric algorithms for general nonlinear programming problems, Mathematical Programming, Vol. 11, 263-282
[184) Han S.-P. (1977): A globally convergent method for nonlinear programming, Journal of Optimization Theory and Applications, Vol. 22, 297-309
[185) Hanson RJ., Frogh F.T. (1992): A quadratic-tensor model algorithm for nonlinear least-squares problems with linear constraints, ACM Transactions on Mathematical Software, Vol. 18, No.2, 115-133
[186) Hao D.N., Reinhardt H.-J. (1998): Gradient methods for inverse heat conduction problems, in: Inverse Problems in Engineering, Vol. 6, No.3, 177-211
[187) Harten A., Engquist B., Osher S., Chakravarthy S.R (1987): Uniformly high order accurate essentially non-oscillatory schemes, III, Journal of Computational Physics, Vol. 71, 231-303
[188) Harten A. (1989): ENO schemes with subcell resolution, Journal of Computational Physics, Vol. 83, 148-184
[189) Hartwanger C. (1996): Optimierung von Antennenhornern im Satellitenbau, Diploma Thesis, Dept. of Mathematics, University of Bayreuth, Germany
[190) Hartwanger C., Schittkowski K., Wolf H. (2000): Computer aided optimal design of horn radiators for satellite communication, Engineering Optimization, Vol. 33, 221-244
[191) Haug E.J. (1989): Computer-aided Kinematics and Dynamics of Mechanical Systems, Allyn and Bacon
[192) Hayashi H. (1989): Drying technologies of foods-their history and future, Drying Technology, Vol. 7, 315-369
[193) Hayes B.T., Lefioch P.G. (1998): Nonclassical shocks and kinetic relations: finite difference schemes, SIAM Journal on Numerical Analysis, Vol. 35, No.6, 2169-2194
[194) Hearn A.C. (1978): Reduce user's manual. Version 3.3, Rand Publication CP78, Santa Monica, USA
[195) Hedrich C. (1996): Modellierung, Simulation und Parameterschiitzung von Kiihlprozessen in WalzstrafJen, Diploma Thesis, Dept. of Mathematics, University of Bayreuth, Germany
[196) Heim A. (1998): Modellierung, Simulation und optimale Bahnplanung von Industrierobotern, Dissertation, Dept. of Mathematics, Technical University of Munich
[197) Heinzel G., Woloszczak R., Thomann P. (1993): TOPFIT 2.0: Pharmacokinetic and Pharmacodynamic Data Analysis System, G. Fischer, Stuttgart, Jena, New York
[198) Henninger RJ., Maudlin P.J., Rightly M.L. (1997): Accuracy of differential sensitivities for onedimensional shock problems, Report LA-UR-97-2740, Los Alamos National Laboratory, Los Alamos, New Mexico 87545

370 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
[199J Hines A.L., Maddox R.N. (1985): Mass Transfer, Prentice-Hall, Englewood-Cliffs
[200J Hoch R. (1995): Modellierung von Flieflwegen und Verweilzeiten in einem Einzugsgebiet unter stationiiren Flieflbedingungen, Diploma Thesis, Fakulty of Biology, Chemistry and Geology, University of Bayreuth, Germany
[201J Hock W., Schittkowski K (1981): Test Examples for Nonlinear Programming Codes, Lecture Notes in Economics and Mathematical Systems, Vol. 187, Springer, Berlin
[202J Hohmann A. (1994): Multilevel Newton h-p collocation, ZIB Berlin, Preprint SC 94-25
[203J Hooker P.F. (1965): Benjamin Gompertz, Journal of the Institute of Actuaries, Vol. 91, 203-212
[204J Horbelt W., Timmer J., Melzer W. (1998): Estimating parameters in nonlinear differential equations with application to physiological data, Report, FDM, University of Freiburg
[205J Horst R., Pardalos P.M. eds. (1995): Handbook of Global Optimization, Kluwer Academic Publishers, Dordrecht, Boston, London
[206J Hotchkiss S.A.M. (1992): Skin as a xenobiotic metabolizing organ, in: Process in Drug Metabolism, G.G. Gibson ed., Taylor and Francis Ltd., London, 217-262
[207J Houghton D.D., Kasahara A. (1968): Nonlinear shallow flow over an isolated ridge, Communications on Pure and Applied Mathematics, Vol. 21, 1-23
[208J Hughes W.F., Brighton J.A. (1991): Theory and Problems of Fluid Dynamics, McGraw Hill, New York
[209J Hull T.E., Enright W.H., Fellen B.M., Sedgwick A.E. (1972): Comparing numerical methods for ordinary differential equations, SIAM Journal on Numerical Analysis, Vol. 9, 603-637
[21OJ Igler B., Knabner P. (1997): Structural identification of nonlinear coefficient functions in transport processes through porous media, Preprint No. 221, Dept. of Applied Mathematics, University of Erlangen, 1997
[211J Igler B., Totsche KU., Knabner P. (1997): Unbiased identification of nonlinear sorption characteristics by soil column breakthrough experiments, Preprint no. 224, Dept. of Applied Mathematics, University of Erlangen
[212J Ihme F., Flaxa V. (1991): Intensivkiihlung von Fein- und Mittelstahl, Stahl und Eisen, Vol. 112, 75-81
[213J Ingham J., Dunn I.J., Heinzle E., Prenosil J.E. (1994): Chemical Engineering Dynamics, VCH, Weinheim
[214J Jacobson D.H., Mayne D.Q. (1970): Differential Dynamic Programming, American Elsevier, New York
[215J Jennings L.S., Fisher M.E., Teo KL., Goh C.J. (1990): MISER3 Optimal Control Software: Theory and User Manuel, National Library of Australia
[216J Jiang G.-S., Levy D., Lin C.-T., Osher S., Tadmor E. (1997): High-resolution non-oscillatory schemes with non-staggared grids for hyperbolic conservation laws, UCLA CAM Report 97-7, Dept. of Mathematics, University of California at Los-Angeles
[217J Jiang G.-S., Shu C.-W. (1995): Efficient implementation of weighted END-methods, UCLA CAM Report 95-42, Dept. of Mathematics, University of California at Los-Angeles

REFERENCES 371
[218] Johnson C. (1998): Adaptive finite element methods for conservation laws, in: Advanced Numerical Approximation of Nonlinear Hyperbolic Equations, B. Cockburn, C. Johnson, C.-W. Shu, E. Tadmor eds., Lecture Notes in Mathematics, Vol. 1697, Springer, Berlin
[219] Johnson R.C., Jasik H. (1984): Antenna Engineering, McGraw Hill, New York
[220] Johnson R.S. (1970): A nonlinear equation incorporating damping and dispersion, Journal of Fluid Dynamics, Vol. 42, 49-60
[221] Jourdan, M. (1997): Simulation und Parameteridentifikation von Destillationskolonnen, Diploma Thesis, Dept. of Mathematics, University of Bayreuth, Germany
[222] Juedes D.W. (1991): A taxonomy of automatic differentiation tools, in: Automatic Differentiation of Algorithms: Theory, Implementation and Application, A. Griewank, G. Corliss eds., SIAM, Philadelphia, 315-330
[223] Kahaner D., Moler C., Nash S. (1989): Numerical Methods and Software, Prentice Hall, Englewood Cliffs
[224] Kalaba R., Spingarn K (1982): Control, Identification, and Input Optimization, Plenum Press, New York, London
[225] Kamke E. (1969): Differentialgleichungen I, Akademische Verlagsgesellschaft, Geest und Portig
[226] Kaps P., Rentrop P. (1979): Generalized Runge-Kutta methods of order four with stepsize control for stiff ordinary differential equations, Numerische Mathematik, Vol. 33, 55-68
[227] Karlsen KH., Lie K-A. (1999): An unconditionally stable splitting scheme for a class of nonlinear parabolic equations, IMA Journal of Numerical Analysis, Vol. 19,609-635
[228] Kaps P., Poon S.W.H., Bui T.D. (1985): Rosenbrock methods for stiff ODE's: A comparison of Richardson extrapolation and embedding techniques, Computing, Vol. 34, No.1, 17-40
[229] Kim I., Liebman M.J., Edgar T.F. (1990): Robust error-in-variables estimation using nonlinear programming techniques, AIChE Journal, Vol. 36, 985-996
[230] Kim K.V. e.al. (1984): An efficient algorithm for computing derivatives and extremal problems, English translation, Ekonomika i matematicheskie metody, Vol. 20, No.2, 309-318
[231] Kletschkowski T., Schomburg U., Bertram A. (2001): Viskoplastische Meterialmodellierung am Beispiel des Dichtungswerkstoffs Polytetrafluorethylen, Technische Mechanik, Vol. 3, 227-241
[232] Knabner P., van Duijn C.J., Hengst S. (1995): Crystal dissolution fronts in flows through porous media, Report, Institute of Applied Mathematics, University of Erlangen
[233] Ko D.Y.C., Stevens W.F. (1971): Study of singular solutions in dynamic optimization, AIChE Journal, Vol. 17, 160-166
[234] Kojouharov, Chen B.M. (1999): Nonstandard methods for the convective-dispersive transport equation with nonlinear reactions, Numerical Methods for Partial Differential Equations, Vol. 16, No.1, 107-132
[235] Kopp R., Philipp F.D. (1992): Physical parameters and boundary conditions for the numerical simulation of hot forming processes, Steel Research, Vol. 63, 392-398
[236] Kowalik J. (1967): A note on nonlinear regression analysis, Australian Computational Journal, Vol. 1, 51-53

372 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
[237] Kripfganz J., Perlt H. (1994): Arbeiten mit Mathematica, Carl Hanser, Oldenburg
[238] Kuhn U., Schmidt G. (1987): Fresh look into the design and computation of optimal output feedback controls for linear multivariable systems, International Journal on Control, Vo!' 46, No.1, 75-95
[239] Kuhn E., Hombach V. (1983): Computer-aided analysis of corrugated horns with axial or ring-loaded radial slots, Report, Research Institute of the Deutsche Bundespost, Germany
[240] Kung A.H.C., Baugham RA., Larrick J.W. (1993): Therapeutic Proteins, W.H. Freeman, New York
[241] Kuzmic P. (1998): Fixed-point methods for computing the equilibrium composition of complex biochemical mixtures, Biochemical Journal, Vo!' 331, 571-575
[242] Kuznetsov, V.A., Puri RK. (1999): Kinetic analysis of high-affinity forms of interleukin-13 receptors, Biophysical Journal, Vo!' 77, 154-172
[243] Lafon F., Osher S. (1991): High order' filtering methods for approximating hyperbolic systems of conservation laws, Journal of Computational Physics, Vo!' 96, 110-142
[244] Lambert J.D. (1991): Numerical Methods for Ordinary Differential Systems: The Initial- Value Problem, John Wiley, New York
[245] Lanczos C. (1956): Applied Analysis, Prentice Hall, Englewood Cliffs
[246] Lagugne-Labarthet F., Bruneel J.L., Sourisseau C., Huber M.R, Borger V., Menzel H. (2002): A microspectrometric study of the azobenzene chromophore orientation in a holographic diffraction grating inscribed on a p(HEMA-co-MMA) functionalized copolymer film, to appear: Journal of Raman Spectroscopy
[247] Lang J. (1993): KARDOS: Kascade reaction diffusion one-dimensional system, Technical Report TR 93-9, ZIB Berlin
[248] Langtangen H.P. (1999): Computational Partial Differential Equations, Lecture Notes in Computational Science and Engineering, Vo!' 2, Springer, Berlin, Heidelberg
[249] Lapidus, L., Luus, R (1967): Optimal Control of Engineering Processes, Blaisdell, Waltham, Mass.
[250] Lapidus L., Aiken RC., Liu Y.A. (1973): The occurence and numerical solution of physical and chemical systems having widely varying time constants, in: Stiff Differential Systems, E.A. Willoughby ed., Plenum Press, New York, 187-200
[251] Lastman G.J., Wentzell RA., Hindmarsh A.C. (1978): Numerical solution of a bubble cavitation problem, Journal of Computational Physics, Vo!' 28, 56-64
[252] Lee J., Ramirez W.F. (1994): Optimal fed-batch control of induced foreign protein production by recombinant bacteria, AIChE Journal, Vo!' 40, 899-907
[253] Lee T.T., Wang F.Y., Newell RB. (1999): Dynamic modelling and simulation of a complex biological process based on distributed parameter approach, AIChE Journal, Vo!' 45, No. 10, 2245-2268
[254] Lefever R., Nicolis G. (1971): Chemical instabilities and sustained oscillations, Journal of Theoretical Biology, Vo!' 30, 267-284
[255] Leis J.E., Kramer M.A. (1988): The simultaneous solution and sensitivity analysis oj systems described by ordinary differential equations, ACM Transactions on Mathematical Software, Vo!' 14, No. 1,45-60

REFERENCES 373
[256J Leis J.E., Kramer M.A. (1988): Algorithm 658: ODESSA - An ordinary differential equation solver with explicit simultaneous sensitivity analysis, ACM Transactions on Mathematical Software, Vol. 14, No.2, 61-67
[257J Levenberg K. (1944): A method for the solution of certain problems in least squares, Quarterly of Applied Mathematics, Vol. 2, 164-168
[258J Lewis R.M., Patera A.T., Peraire J. (2000): A posteriori finite element bounds for sensitivity derivatives of partial-differential-equation outputs, Finite Elements in Design, Vol. 34, 271-290
[259J Liepelt M., Schittkowski K. (2000): Algorithm 746: New features of PCOMP, a FORTRAN code for automatic differentiation, ACM Transactions on Mathematical Software, Vol. 26, No.3, 352-362
[260J Liepelt M., Schittkowski K. (2000): Optimal Control of Distributed Systems with Break Points, in: Online Optimization of Large Scale Systems, M. Grotschel, S.O. Krumke, J. Rambau eds., Springer, Berlin, 271-294
[261J Lindberg P.O., Wolf A. (1998): Optimization of the short term operation of a cascade of hydro power stations, in: Optimal Control: Theory, Algorithms, and Applications, W.W. Hager, P.M. Padalos eds., Kluwer Academic Publishers, Dordrecht, Boston, London, 326-345
[262J Lindstrom P. (1982): A stabilized Gauss-Newton algorithm for unconstrained least squares problems, Report UMINF-102.82, Institute of Information Processing, University of Umea, Umea, Sweden
[263J Lindstrom P. (1983): A general purpose algorithm for nonlinear least squares problems with nonlinear constraints, Report UMINF-103.83, Institute of Information Processing, University of Ume1'-, Umea, Sweden
[264J Liska R., Wendroff B. (1998): Composite schemes for conservation laws, SIAM Journal on Numerical Analysis, Vol. 35, No.6, 2250-2271
[265J Liu X.-D., Osher S. (1997): Convex ENO high order multi-dimensional schemes without field by field decomposition or staggered grids, UCLA CAM Report 97-26, Dept. of Mathematics, University of California at Los Angeles
[266J Logan J.M. (2001): Transport Modeling in Hydrochemical Systems, Interdisciplinary Applied Mathematics, Springer, New York
[267J Lohmann T. (1988): Parameteridentifizierung in Systemen nichtlinearer Differentialgleichungen, Dissertation, Dept. of Mathematics, University of Bonn
[268J Lohmann T.W. (1997): Modellierung und Identifizierung der Reaktionskinetik der Kohlepyrolyse, Fortschrittsberichte VDI, Reihe 3, No. 499, VDI, Dusseldorf
[269J Loth H., Schreiner T., Wolf M., Schittkowski K., Schiifer U. (2001): Fitting drug dissolution measurements of immediate release solid dosage forms by numerical solution of differential equations, submitted for publication
[270J Louis A.K. (1989): Inverse und schlecht gestellte Probleme, Teubner, Stuttgart
[271J Lubich C. (1993): Integration of stiff mechanical systems by Runge-Kutta methods, ZAMP, Vol. 44, 1022-1053
[272J Lucht W., Debrabant K. (1996): Models of quasi-linear PDAEs with convection, Report, Dept. of Mathematics and Computer Science, University of Halle, Germany

374 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
[273] Lucht W., Strehmel K (1998): Discretization based indices for semilinear partial differential algebraic equations, Applied Numerical Mathematics, Vol. 28, 371-386
[274] Luenberger D.G. (1979): Introduction to Dynamic Systems - Theory, Models, and Applications, John Wiley, New York
[275] Luus R (1974): Two-pass method for handling diffcult equality constraints in optimization, AIChE Journal, Vol. 20, 608-610
[276] Luus, R (1993): Optimization of fed-batch fermentors by iterative dynamic programming, Biotechnology and Bioengineering, Vol. 41, 599-602
[277] Luus R (1993): Optimal control of batch reactors by iterative dynamic programming, Journal of Process Control, Vol. 4, No.4, 218-226
[278] Luus R (1998): Iterative dynamic programming: Prom curiosity to a practical optimization procedure, Control and Intelligent Systems, Vol. 26, No.1, 1-8
[279] Luus R (2000): Iterative Dynamic Programming, Chapman and Hall/CRC, Boca Raton, London, New York, Washington
[280] Luyben W.L. (1973): Process Modeling: Simulation and Control for Chemical Engineers, McGraw Hill, New York
[281] Luyben W.L. (1990): Process Modeling: Simulation and Control for Chemical Engineers, McGraw Hill, New York
[282] Machielsen KC.P. (1987): Numerical solution of optimal control problems with state constraints by sequential quadratic programming in function space, CWI Tract, Amsterdam
[283J Madsen N.K, Sincovec RF. (1976): Software for partial differential equations, in: Numerical Methods for Differential Systems, L. Lapidus, W.E. Schiesser eds., Acedemic Press, New York
[284J Mahdavi-Amiri N. (1981): Generally constrained nonlinear least squares and generating nonlinear programming test problems: Algorithmic approach, Dissertation, The John Hopkins University, Baltimore, Maryland, USA
[285J Majer C. (1998): Parameterschiitzung, Versuchsplanung und Trajektorienoptimierung jilr verfahrenstechnische Prozesse, Fortschrittberichte VDI, Reihe 3, Nr. 538, VDI, Dusseldorf
[286J Majer C., Marquardt W., Gilles E.D. (1995): Reinitialization of DAE's after discontinouities, Proceedings of the Fifth European Symposium on Conputer-Aided Process Engineering, 507-512
[287J Mannshardt R (1978): One-step methods of any order for ordinary differential equations with discontinuous right hand sides, Numerische Mathematik, Vol. 31, 131-152
[288J Maria G. (1989): An adaptive strategy for solving kinetic model concomitant estimation-reduction problems, Canadian Journal of Chemical Engineering, Vol. 67, 825-837
[289J Marion M., Mollard A. (1999): A multilevel characteristics method for periodic convection-dominated diffusion problems, Numerical Methods for Partial Differential Equations, Vol. 16, No.1, 107-132
[290J Marquardt D. (1963): An algorithm for least-squares estimation of nonlinear parameters, SIAM Journal on Applied Mathematics, Vol. 11, 431-441
[291J Marquina A., Donat R (1993): Capturing shock reflections: A nonlinear local characteristic approach, UCLA CAM Report No. 93-31, Dept. of Mathematics, University of California at LosAngeles

REFERENCES 375
[292] Marquina A, Osher S. (2000): Explicit algorithms for a new time-dependent model based on level set motion for nonlinear deblurring and noise removal, Report, Dept. of Mathematics, University of California, Los Angeles
[293] Martinson W.S., Barton P.1. (1996): A differentiation index for partial differential equations, SIAM Journal on Scientific Computing, Vol. 21, No.6, 2295-2315
[294] Mattheij R., Molnaar J. (1996): Ordinary Differential Equations in Theory and Practice, John Wiley, Chichester, UK
[295] Maurer H., Weigand M. (1992): Numerical solution of a drug displacement problem with bounded state variables, Optimal Control Applications and Methods, Vol. 13, 43-55
[296] Mayer U. (1993): Untersuchungen zur Anwendung eines Einschritt-Polynom- Verfahrens zur Integration von Differentialgleichungen und DA-Systemen, Ph.D. Thesis, Dept. of Chemical Engineering, University of Stuttgart
[297] Mayr L.M., Odefey C., Schutkowski M., Schmid F.X. (1996): Kinetic analysis of the unfolding and refolding of ribonuclease Tl by a stopped-flow double-mixing technique, Biochemistry, Vol. 35, 5550-5561
[298] Meadows D.H., Meadows D.L., Randers J. (1992): Beyond the Limits, Chelsea Green, Post Mills
[299] Meissner E. (2000): Messung von kurzen Konzentrationsprojilen mit Hilfe der analytischen TEMEDX am Beispiel der Bestimmung von Diffusionskoeffizienten fUr Mg-Fe Interdiffusion in Olivin, Dissertation, Faculty of Biology, Chemistry, and Geological Sciences, University of Bayreuth
[300] Miele A., Wang T., Melvin W.W. (1987): Optimal abort landing trajectories in the presence of windshear, Journal of Optimization Theory and Applications, Vol. 12, 815-821
[301] Mishkin M.A., Saguy I., Karel M. (1982): Applications of optimisation in food dehydration, Food Technology, Vol. 36, 101-109
[302] Mishkin M.A. (1983): Dynamic modeling, simulation and optimization of quality changes in airdrying of foodstuffs, Ph.D. Thesis, Massachusetts Institute of Technology, Cambrigde, MA, USA
[303] Mishkin M.A. (1983): Dynamic optimization of dehydration processes: Minimizing browning in dehydration of potatoes, Journal of Food Science, Vol. 48, 1617-1621
[304] Missel P.J. (2000): Finite element modeling of diffusion and partioning in biological systems, Report, Drug Delivery, Alcon Research Ltd., Fort Worth, USA
[305] Mittelmann H.D. (2001): Sufficient optimality for discretized parabolic and elliptic control problems, in: Fast Solution of Discretized Optimization Problems, K.-H. Hoffmann, R.H.W. Hoppe, and V. Schulz (eds.), ISNM 138, Birkhiiuser, Basel
[306] Mittra R. (1973): Computer Techniques for Electromagnetics, Pergamon Press, Oxford
[307] Molander M. (1990): Computer aided modelling of distributed parameter process, Technical Report No. 193, School of Electrical and Computer Engineering, Chalmers University of Technology, G6teborg, Sweden
[308] More J.J. (1977): The Levenberg-Marquardt algorithm: implementation and theory, in: Numerical Analysis, G. Watson ed., Lecture Notes in Mathematics, Vol. 630, Springer, Berlin
[309] More J.J., Garbow B.S., Hillstrom K.E. (1981): Testing unconstrained optimization software, ACM Transactions on Mathematical Software, Vol. 7, No.1, 17-4l

376 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
[31OJ Morton KW., Mayers D.F. (1994): Numerical Solution of Partial Differential Equations, Cambridge University Press
[311J Munack A. (1995): Simulation bioverfahrenstechnischer Prozesse, in: Prozessimulation, H. Schuler ed., VCH, Weinheim, 409-455
[312J Munack A., Posten C. (1989): Design of optimal dynamical experiments for parameter estimation, Proceedings of the Americal Control Conference, Vol. 4, 2010-2016
[313J Naguma J., Arimoto S., Yoshizawa (1962): An active pulse transmission line simulating nerve axon, Proceedings of the IRE, Vol. 50, 2061-2070
[314J Nagurka M.L. (1990): Fourier-based optimal control of nonlinear dynamic systems, Journal on Dynamical Systems, Measurements and Control, Vol. 112, 17-26
[315J Nayfeh A. (1972): Perturbation Analysis, John Wiley, New York
[316J Neittaanmiiki P., Tiba D. (1994): Optimal Control of Nonlinear Parabolic Systems, Marcel Dekker, New York, Basel
[317J NeIder J.A., Mead R. (1965): A simplex method for function minimization, The Computer Journal, Vol. 7, 308
[318J Nelson KA. (1993): Using the glass transition approach for understanding chemical reaction rates in model food systems, Ph.D. Thesis, Minnesota University, USA
[319J Nelson KA., Labuza T.P. (1994): Water activity and food polymer science: implications of state on Arrhenius and WLF models in predicting shelf life, Journal of Food Engineering, Vol. 22, 271-289
[320J Nelson W. (1981): Analysis of performance-degradation data, IEEE Transactions on Reliability, Vol. 2, No.2, 149-155
[321J Newman P.A., Hou G.J.W., Taylor A.C. (1996): Observations regarding use of advanced CFD analysis, sensitivity analysis, and design codes in MDO, ICASE Report No. 96-16, NASA Langley Research Center, Hampton, Virginia 23681
[322J Nickel B. (1995): Parameterschiitzung basierend auf der Levenberg-Marquardt-Methode in Kombination mit direkter Suche, Diploma Thesis, Dept. of Mathematics, University of Bayreuth, Germany
[323J Nishida N., Ichikawa A., Tazaki E. (1972), Optimal design and control in a class of distributed parameter systems under uncertainty, AIChE Journal, Vol. 18, 561-568
[324J Nocedal J., Wright J. (1999): Numerical Optimization, Springer Series in Operational Research, Springer, New York
[325J Nowak U. (1995): A fully adaptive MOL-treatment of parabolic lD-problems with extrapolation techniques, Preprint SC 95-25, ZIB Berlin
[326J Oberle H.J. (1987): Numerical Computation of Singular Control Functions for a Two-Link Robot Arm, Lecture Notes in Control and Information Sciences, Vol. 95, Springer, Berlin
[327J Odefey C., Mayr L.M., Schmid F.X. (1995): Non-prolyl cis-trans peptide bond isomerization as a rate-determining step in protein unfolding and refolding, Journal of Molecular Biology, Vol. 245, 69-78
[328J Oh S.H., Luus R. (1975): Optimal feedback control of time-delay systems, AIChE Journal, Vol. 22, 144-147

REFERENCES 377
[329] Osborne M.R. (1972): Some aspects of nonlinear least squares calculations, in: Numerical Methods for Nonlinear Optimization, F. Lootsma ed., Academic Press, New York
[330] Otey G.R, Dwyer H.A. (1979): Numerical study of the interaction of fast chemistry and diffusion, AIAA Journal, Vol. 17, 606-613
[331] Otter M., Tiirk S. (1988): The DFVLR models 1 and 2 of the Manutec R3 robot, DFVLRMitteilungen 88-3, DFVLR, Oberpfaffenhofen, Germany
[332] Ou L.-T. (1985): 2.4-D degradation and 2.4-D degrading microorganisms in soils, Soil Sciences, Vol. 137, 100-107
[333] Pantelides C.C., Gritsis D., Morison K.R, Sargent RW.H. (1988): The mathematical modeling of transient systems using differential-algebraic equations, Computers and Chemical Engineering, Vol. 12, 440-454
[334] Papalambros P.Y., Wilde D.J. (1988): Principles of Optimal Design, Cambridge University Press
[335] Park S., Ramirez W.F. (1988): Optimal production of secreted protein in fed-batch reactors, AIChE Journal, Vol. 34, No.8, 1550-1558
[336] Peano G. (1890): Demonstration de l'int€grabilit€ des equations differentielle ordinaires, Mathematische Annalen, Vol. 37, 182-228
[337] Pennington S.V., Berzins M. (1994): New NAG Library software for first-order partial differential equations, ACM Transactions on Mathematical Software, Vol. 20, No.1, 63-99
[338] Peters N., Warnatz J. eds. (1982): Numerical Methods in Laminar Flame Propagation, Notes on Numerical Fluid Dynamics, Vol. 6, Vieweg, Braunschweig
[339] Petzold L.R (1982): A description of DASSL: A differential/algebraic system solver, in: Proceedings of the 10th IMACS World Congress, Montreal, Canada
[340] Pfeiffer B.-M., Marquardt W. (1996): Symbolic semi-discretization of partial differential equation systems, Mathematics and Computers in Simulation, Vol. 42, 617-628
[341] Pfleiderer J., Reiter J. (1991): Biplicit numerical integration of partial differential equations with the transversal method of lines, Report No. 279, DFG SPP Anwendungsbezogene Optimierung und Steuerung, Technical University, Dept. of Mathematics, Munich
[342] Pin-Gao Gu, E.T. Vishniac, J.K. Cannizo (2000): Thermal equilibrium curves and turbulent mixing in Keplerian accretion disks, The Astrophysical Journal, Vol. 534, 38()"397
[343] Pinter J.D. (1995): Global Optimization in Action, Kluwer Academic Publishers, Dordrecht, Boston, London
[344] Plusquellec Y., Courbon F., Nogarede S., Houin G. (1998): Consequence of equal absorption, distribution and/or elimination rate constants, Report, UFR de Mathematiques, Universite Paul Sabatier, Toulouse
[345] Poeppe C., Pelliciari C., Bachmann K. (1979): Computer analysis of Feulgen hydrolysis kinetics, Histochemistry, Vol. 60, 53-60
[346] Pohjanpalo H. (1978): System identifiability based on power series expansion of the solution, Mathematical Bioscience, Vol. 41, 21-33

378 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
[347] Posten C., Munack A. (1989): On-line application of parameter estimation accuracy to biotechnical processes, Proceedings of the Americal Control Conference, Vol. 3, 2181-2186
[348] Powell M.J.D. (1978): A fast algorithm for nonlinearly constraint optimization calculations, in: Numerical Analysis, G.A. Watson ed., Lecture Notes in Mathematics, Vol. 630, Springer, Berlin
[349] Powell M.J.D. (1978): The convergence of variable metric methods for nonlinearly constrained optimization calculations, in: Nonlinear Programming 3, O.L. Mangasarian, RR Meyer, S.M. Robinson eds., Academic Press, New York, London
[350] Pratt W.B., Taylor P. (1990): Principles of Drug Action, Churchill Livingstone, New York
[351] Preston A.J., Berzins M. (1991): Algorithms for the location of discintinuities in dynamic simulation problems, Computers and Chemical Engineering, Vol. 15,701-713
[352] Price H., Varga R., Warren J. (1966): Application of oscillation matrices to diffusion-convection equations, Journal of Methematical Physics, 301-311
[353] Riiumschussel S. (1998): Rechnerunterstiitzte Vorverarbeitung und Codierung verfahrenstechnischer Modelle fUr die Simulationsumgebung DIVA, Fortschrittberichte VDI, Reihe 20, Nr. 270, VDI, Dusseldorf
[354] Ramsin H., Wedin P.A. (1977): A comparison of some algorithms for the nonlinear least squares problem, Nordisk Tidstr. Informationsbehandlung (BIT), Vol. 17, 72-90
[355] Ratkowsky D.A. (1988): Nonlinear Regression Modeling, Marcel Dekker, New York
[356] Reich J.G.,. Zinke I. (1974): Analysis of kinetic and binding measurements, IV Redundancy of model parameters, Studia Biophysics, Vol. 43, 91-107
[357] Rektorys K. (1982): The Method of Discretization in Time and Partial Differential Equations, Reidel, Dordrecht
[358] Renardy M., Rogers RC. (1993): An Introduction to Partial Differential Equations, Texts in Applied Mathematics, Vol. 13, Springer, Berlin
[359] Richter 0., Diekkrueger B., Noertersheuser P. (1996): Environmental Fate Modelling of Pesticides, VCH, Weinheim
[360] Richter 0., Noertersheuser, Pestemer W. (1992): Non-linear parameter estimation in pesticide degradation, The Science of the Total Environment, Vol. 123/124, 435-450
[361] Richter 0., Sondgerath D. (1990): Parameter Estimation in Ecology, VCH, Weinheim
[362] Richter 0., Spickermann U., Lenz F. (1991): A new model for plant growth, Gartenbauwissenschaft, Vol. 56, No.3, 99-106
[363] Robertson H.H. (1966): The solution of a set of reaction rate equations, in: Numerical Analysis, J. Walsh ed., Academic Press, London, New York, 178-182
[364] Roberson RE., Schwertassek R (1988): Dynamics of Multibody Systems, Springer, Berlin
[365] Rominger K.L., Albert H.J. (1985): Radioimmunological determination of Fenoterol. Part I: Theoretical fundamentals, Arzneimittel-Forschung/Drug Research, Vol. 35, No.1, 415-420
[366] Roos Y.H. (1995): Phase Transition in Foods, Academic Press, San Diego

REFERENCES 379
[367] Rosenau P., Stroder A.C., Stirbet A.D., Strasser R.J. (1999): Recent advances in modelling the photosynthesis, Report, IWR, University of Heidelberg
[368] Rosenbrock H.H. (1969): An automatic method for finding the greatest and least value of a function, Computer Journal, Vol. 3, 175-183
[369] Ross G.J.S. (1990): Nonlinear Estimation, Springer, Berlin
[370] Runge C. (1895): Uber die numerische Aufiosung totaler Differetialgleichungen, Mathematische Annalen, Vol. 46, 167-178
[371] Saad M.F., Anderson R.L., Laws A., Watanabe R.M., Kades W.W., Chen Y.-D.l. , Sands R.E., Pei D., Bergmann R.N. (1994): A comparison between the minimal model and the glucose clamp in the assessment of insulin sensitivity across the spectrum of glucose tolerance, Diabetes, Vol. 43, 1114-1121
[372] Sakawa Y., Shindo Y. (1982): Optimal control of container cranes, Automatica, Vol. 18, 257-266
[373] Sanz-Serna J.M., Calvo M.P. (1994): Numerical Hamiltonian Processes, Chapman and Hall, London
[374] Saravacos G.D., Charm S.E. (1962): A study of the mechanism of fruit and vegetable dehydration, Food Technology, 78-81
[375] Schenk J.L., Staudinger G. (1989): Computer model of pyrolysis for large coal particles, in: Proceedings of the International Conference of Coal Science, Tokyo
[376] Schiesser W.E. (1991): The Numerical Method of Lines, Academic Press, New York, London
[377] Schiesser W.E. (1994): Computational Mathematics in Engineering and Applied Science, CRC Press, Boca Raton
[378] Schiesser W.E. (1994): Method of lines solution of the Korteweg-de Vries equation, Computers in Mathematics and Applications, Vol. 28, No. 10-12, 147-154
[379] Schiesser W.E., Silebi C.A. (1997): Computational Transport Phenomena, Cambridge University Press
[380] Schittkowski K. (1979): Numerical solution of a time-optimal parabolic boundary-value control problem, Journal of Optimization Theory and Applications, Vol. 27, 271-290
[381] Schittkowski K. (1980): Nonlinear Programming Codes, Lecture Notes in Economics and Mathematical Systems, Vol. 183 Springer, Berlin
[382] Schittkowski K. (1983): On the convergence of a sequential quadratic programming method with an augmented Lagrangian search direction, Mathematische Operationsforschung und Statistik, Series Optimization, Vol. 14, 197-216
[383] Schittkowski K. (1985/86): NLPQL: A Fortran subroutine solving constrained nonlinear programming problems, Annals of Operations Research, Vol. 5, 485-500
[384] Schittkowski K. (1987): More Test Examples for Nonlinear Programming, Lecture Notes in Economies and Mathematical Systems, Vol. 182, Springer, Berlin
[385] Schittkowski K. (1988): Solving nonlinear least squares problems by a general purpose SQP-method, in: Trends in Mathematical Optimization, K.-H. Hoffmann, J.-B. Hiriart-Urruty, C. Lemarechal, J. Zowe eds., International Series of Numerical Mathematics, Vol. 84, Birkhiiuser, Boston, Basel, Berlin, 295-309

380 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
[386] Schittkowski K. (1993): DFDISC: A direct search Fortran subroutine for nonlinear programming, User's Guide, Dept. of Mathematics, University of Bayreuth, Germany
[387] Schittkowski K. (1994): Parameter estimation in systems of nonlinear equations, Numerische Mathematik, Vol. 68, 129-142
[388] Schittkowski K. (1997): Parameter estimation in one-dimensional time dependent partial differential equations, Optimization Methods and Software, Vol. 7, No. 3-4, 165-210
[389] Schittkowski K. (1998): Parameter estimation in a mathematical model for substrate diffusion in a metabolically active cutaneous tissue, Progress in Optimization II, 183 - 204, Proceedings of the Optimization Day, Perth, Australia, June 29-30
[390] Schittkowski K. (1998): Parameter estimation and model verification in systems of partial differential equations applied to transdermal drug delivery, Report, Dept. of Mathematics, University of Bayreuth, Germany
[391] Schittkowski K. (1999): PDEFIT: A FORTRAN code for parameter estimation in partial differential equations, Optimization Methods and Software, Vol. 10, 539-582
[392] Schittkowski K. (2001): EASY-FIT: A software system for data fitting in dynamic systems, Sructural and Multidisciplinary Optimization, Vol. 23, No.2, 153-169
[393] Schittkowski T., Briiggemann, Mewes B. (2002): LII and Raman measurements in sooting methane and ethylene flames, Report, LTTT, Dept. of Applied Natural Sciences, University of Bayreuth
[394] Schneider R., Posten C., Munack A.· (1992): Application of linear balance equations in an online observation system for fermentation processes, Proceedings of the IFAC Modelling and Control of Biotechnical Processes, Boulder, Colorado, 319-322
[395J Schreiner T. (1995): Mechanistische und kinetische Parameter der Arzneistoffaufiosung aus festen Zubereitungen als Kriterien der galenischen Qualitiitssicherung, Dissertation, Dept. of Pharmaceutics, University of Saarbriicken
[396J Schumacher E. (1997): Chemische Reaktionskinetik, Script, Dept. of Chemistry, University of Bern, Switzerland
[397J Scott M.R., Watts H.A. (1976): Solution methods for stiff differential equations, in: Numerical Methods for Differential Systems, L. Lapidus, W.E. Schiesser eds., Academic Press, New York, London, 197-227
[398] Seber G.A.F. (1977): Linear Regression Analysis, John Wiley, New York
[399] Seber G.A.F. (1984): Multivariate Observations, John Wiley, New York
[400J Seber G.A.F., Wild C.J. (1989): Nonlinear Regression, John Wiley, New York
[401] Seelig F.F. (1981): Unrestricted harmonic balance II. Application to stiff ODE's in enzyme catalysis, Journal of Mathematical Biology, Vol. 12, 187-198
[402] Seifert P. (1990): A realization of the method of lines used for chemical problems, Colloquia Mathematica Societatis Janos Bolyai, Numerical Methods, Vol. 59, 363-373
[403] Sellers P.J., Dickinson R.E., Randall D.A., Betts A.K., Hall F.G., Berry J.A.,Collatz G.J., Denning A.S., Mooney H.A., Nobre C.A., Sato N., Field C.B., Henderson-Sellers A. (1997): Modeling the exchanges of energy, water, and carbon between continents and the atmosphere, Science, Vol. 275, 502-509

REFERENCES 381
[404] Seredynski F. (1973): Prediction of plate cooling during rolling mill opemtion, Journal of the Iron and Steel Institute, Vol. 211, 197-203
[405] Seydel R. (1988): From Equilibrium to Chaos: Pmctical Bifurcation and Stability Analysis, Elsevier, Amsterdam
[406] Shacham M. (1985): Comparing software for the solution of systems of nonlinear algebmic equations arising in chemical engineering, Computers and Chemical Engineering, Vol. 9, 103-112
[407] Shakhno, S. (2001): Some numerical methods for nonlinear least squares problems, in: Symbolic Algebraic Methods and Verification Methods, Alefeld, G6tz eds., Springer, Wien, 235-249
[408] Shampine L.F. (1980): Evaluation of a test set for stiff ODE solvers, ACM Transactions on Mathematical Software, Vol. 7, No.4, 409-420
[409] Shampine L.F. (1994): Numerical Solution of Ordinary Differential Equations, Chapman and Hall, New York, London
[410] Shampine L.F., Watts H.A., Davenport S.M. (1976): Solving nonstiff ordinary differential equations - The state of the art, SIAM Reviews, Vol. 18, 376-411
[411] Shampine L.F., Watts H.A. (1979): The art of writing a Runge-Kutta code, Applied Mathematics and Computations, Vol. 5, 93-121
[412] Shampine L.F., Gordon M.K. (1975): Computer Solution of Ordinary Differential Equations: The Initial- Value Problem, Freeman, San Francisco
[413] Sheng Q., Khalic A.Q.M. (1999): A compound adaptive approach to degenemte nonlinear quenching problems, Numerical Methods for Partial Differential Equations, Vol. 16, No.1, 107-132
[414] Shiriaev D., Griewank A., Utke J. (1997): A user guide to ADOL-F: Automatic differentiation of Fortran codes, Preprint, Institute of Scientific Computing, Technical University Dresden, Germany
[415] Shu C.W. (1998): Essentially non-oscillatory and weighted essentially non-oscillatory schemes for hyperbolic conservation laws, in: Advanced Numerical Approximation of Nonlinear Hyperbolic Equations, A. Quarteroni ed., Lecture Notes in Mathematics, Vol. 1697, Springer, Berlin, 325-432
[416] Shu C.W., Osher S. (1989): Efficient implementation of essentially non-oscillatory shock-capturing schemes, II" Journal of Computational Physics, Vol. 83, 32-78
[417] Silver S. (1949): Microwave Antenna Theory and Design, McGraw Hill, New York
[418] Simeon B. (1994): Numerische Integmtion mechanischer Mehrkorpersysteme: Projizierende Deskriptorformen, Algorithmen und Rechenprogmmme, Fortschrittberichte VDI, Reihe 20, Nr. 130, VDI, Dusseldorf
[419] Simeon B., Rentrop P. (1993): An extended descriptor form for the simulation of constmined mechanical systems, in: Advanced Multibody System Dynamics, W. Schiehlen ed., Kluwer Academic Publishers, Dordrecht, Boston, London, 469-474
[420] Simeon B., Grupp F., Fuhrer C., Rentrop P. (1994): A nonlinear truck model and its treatment as a multibody system, Journal of Computational and Applied Mathematics, Vol. 50, 523-532
[421] Sincovec R.F., Madsen N.K. (1975): Software for nonlinear partial differential equations, ACM Transactions on Mathematical Software, Vol. 1, No.3, 232-260

382 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
[422J Smith G.D. (1985): Numerical Solution of Partial Differential Equations: Finite Difference Methods, Clarendon Press, Oxford Applied Mathematics and Computing Science Series
[423J Smith M.G. (1966): Laplace Transform Theory, Van Nostrand
[424J Smoller J. (1994): Shock Waves and Reaction-Diffusion Equations, Grundlehren der mathematischen Wissenschaften, Vol. 258, Springer, Berlin
[425J Spellucci P. (1993): Numerische Verfahren der nichtlinearen Optimierung, Birkhiiuser, Boston, Basel, Berlin
[426J Spellucci P. (1998): A SQP method for general nonlinear programs using only equality constrained subproblems, Mathematical Programming, Vol. 82, 413-448
[427J Spiegel M.R. (1965): Laplace Transforms, Schaum's Outline Series, McGraw Hill, New York
[428J Spoelstra J., van Wyk D.J. (1987): A method of solution for a non-linear diffusion model and for computing the parameters in a model, Journal of Computational and Applied Mathematics, Vol. 20, 379-385
[429J Stehfest H. (1970): Algorithm 368: Numerical inversion of Laplace transforms, Communications of the ACM, Vol. 13,47-49
[430J Steinebach G., Rentrop P. (2000): An adaptive method of lines approach for modelling flow and transport in rivers, Preprint No. 00/09, IWRMM, University of Karlsruhe
[431J Steinstriisser 1. (1994): The organized HaCaT cell culture sheet: A model approach to study epidermal peptide drug metabolism, Dissertation, Pharmaceutical Institute, ETH Ziirich
[432J Stenger F., Gustafson S.-A., Keyes B., O'Reilly M., Parker K (1999): ODE-IVP-PACK via Sinc indefinite integration and Newton's method, Numerical Algorithms, Vol. 20, 241-268
[433J Stirbet A.D., Strasser R.J. (1996): Numerical solution of the in vivo fluorescence in plants, Mathematical Computations and Simulations, Vol. 42, 245-253
[434J Stoer J. (1985): Foundations of recursive quadratic programming methods for solving nonlinear programs, in: Computational Mathematical Programming, K. Schittkowski ed., NATO ASI Series, Series F: Computer and Systems Sciences, Vol. 15, Springer, Berlin
[435J Stoer J., Bulirsch R. (1980): Introduction to Numerical Analysis, Springer, New York
[436J Stortelder W.J.H. (1998): Parameter estimation in nonlinear dynamical systems, Dissertation, National Research Institute for Mathematics and Computer Science, University of Amsterdam
[437J Strikwerda J.C. (1997): Finite Difference Schemes and Partial Differential Equations, Chapman and Hall, New York
[438J Sweby P.K. (1984): High resolution schemes using flux limiters for hyperbolic conservation laws, SIAM Journal on Numerical Analysis, Vol. 21, No.5, 995-1011
[439J Teo KL., Wong KH. (1992): Nonlinearly constrained optimal control of nonlinear dynamic systems, Journal of the Australian Mathematical Society, Series B, Vol. 33, 507-530
[440J Thomas J.W. (1995): Numerical Partial Differential Equations, Texts in Applied Mathematics, Vol. 22, Springer, Berlin

REFERENCES 383
[441] Thomopoulus S.C.A., Papadakis I.N.M. (1991): A single shot method for optimal step computation in gradient algorithms, Proceedings of the 1991 American Control Conference, Boston, MA, American Control Counciol, IEEE Service Center, Piscataway, NJ, 2419-2422
[442] Timmer J., Rust H., Horbelt W., Voss H.U. (2000): Parametric, nonparametric and parametric modelling of a chaotic circuit time series, Physics Letters A, Vol. 274, 123-134
[443] Timoshenko S., Goodier J.N. (1970): Theory of Elasticity, McGraw Hill, New York
[444] Tjoa I., Biegler L. (1991): Simultaneous solution and optimization strategies for parameter estimation of differantial-algebraic equation systems, Industrial Engineering Chemistry Research, Vol. 30, 376-385
[445] Tjoa T.B., L.T. Biegler L.T. (1992): Reduced successive quadratic programming strategy for errorsin-variables estimation, Computers and Chemical Engineering, Vol. 16, 523
[446] Troeltzsch F. (1999): Some remarks on second order sufficient optimality conditions for nonlinear elliptic and parabolic control problems, in: Proceedings of the Workshop 'Stabilitiit und Sensitivitiit von Optimierungs- und Steuerungsproblemen', Burg (Spreewald), Germany, 21.-23.4.99
[447] Tveito A., Winther R. (1998): Introduction to Partial Differential Equations, Springer, New York
[448] Ulbrich S. (1995): Stabile Randbedingungen und implizite entropiedissipative numerische Verfahren fur Anfangs-Randwertprobleme mehrdimensionaler nichtlinearer Systeme von Erhaltungsgleichungen mit Entropie, Dissertation, TU Miinchen, Institut flir Angewandte Mathematik und Statistik
[449] van den Bosch B.A.J. (1978): Identification of parameters in distributed chemical reactors, in: Distributed Parameter Systems, W.H. Ray, D.G. Lainiotis eds., Marcel Dekker, New York, Basel, 47-134
[450] van den Bosch P.P.J., van der Klauw A.C. (1994): Modeling, Identification and Simulation of Dynamical Systems, CRC Press, Boca Raton, Ann Arbor, London, Tokyo
[451] van Doesburg H., De Jong W.A. (1974): Dynamic behavior of an adiabatic fixed-bed methanator, in: Advances in Chemistry, Vol. 133, International Symposium on Reaction Engineering, Evanston, 489-503
[452] van Duijn C.J. (1989): Flow through porous media, DFG-SPP-Report No. 135, Dept. of Mathematics, University of Augsburg
[453] van Genuchten M.T. (1980): A closed-form equation for predicting the hydraulic conductivity of unsaturated soils, Soil Science Society of America Journal, Vol. 44, 892-898
[454] van Genuchten M.T., Wierenga P.J. (1976): Mass transfer studies in sorbing porous media. 1. Analytical solutions, Soil Sciences Society of America Journal, Vol. 44, 892-898
[455] van Kan J.J .I.M., Segal A. (1995): Numerik partieller Differentialgleichungen fUr Ingenieure, Teubner, Stuttgart
[456] Vande Wouwer A., Saucec Ph., Schiesser W.E. (2001): Adaptive Methods of Lines, Chapman and Hall/CRC, Boca Raton
[457] Varah J.M. (1982): A spline least squares method for numerical parameter estimation in differential equations, SIAM Journal on Scientific Statistical Computing, Vol. 3, 28-46
[458] Varma A., Morbidelli M., Wu H. (1999): Parametric Sensitivity in Chemical Systems, Cambridge University Press

384 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
[459J Vasile M., Jehn R. (1999): Low thrust orbital transfer of a LISA spacecraft with constraints on the solar aspect angle, MAS Working Paper 424, ESOC, Darmstadt
[460J Vassiliadis V.S., Sargent R.W.H., Pantelides C.C. (1994): Solution of a class of multistage dynamic optimization problems, 2. Problems with path constraints, Industrial Engineering and Chemical Research, Vol. 33, No.9, 2123-2133
[461J Verwer J.G., Blom J.G., Furzeland R.M., Zegeling P.A. (1989): A moving grid method for onedimensional PDEs based on the method of lines, in: Adaptive Methods for Partial Differential Equations, J.E. Flaherty, P.J. Paslow, M.S. Shephard, J.D. Vasilakis eds., SIAM, Philadelphia, Pa., 160-175
[462J Verwer J.G., Blom J.G., Sanz-Serna J.M. (1989): An adaptive moving grid method for onedimensional systems of partial differential equations, Journal of Computational Physics, Vol. 82, 454-486
[463J Vlassenbeck J., van Dooren R. (1983): Estimation of the mechanical parameters of the human respiratory system, Mathematical Biosciences, Vol. 69, 31-55
[464J von Stryck O. (1995): Numerische Losung optimaler Steuerungsprobleme, Fortschrittsberichte VDI, Reihe 8, Nr. 441, VDI, Dusseldorf
[465J Vreugdenhil C.B., Koren B. eds. (1993): Numerical Methods for Advection-Diffusion Problems, Vieweg, Braunschweig
[466J Walas S.M. (1991): Modeling with Differential Equations in Chemical Engineering, ButterworthHeinemann, Boston
[467J Waldron R.A. (1969): Theory of Guided Electromagnetic Waves, Van Nostand Reinhold Company, London
[468J Walsteijn F.R. (1993): Essentially non-oscillatory (ENO) schemes, in: Numerical Methods for Advection-Diffusion Problems, C.B. Vreugdenhil, B. Koren eds., Notes on Fluid Mechanics, Vol. 45, Vieweg, Braunschweig
[469J Walter E. (1982): Identifiability of State Space Models, Lecture Notes in Biomathematics, Vol. 46, Springer, Berlin
[470J Walter E., Pronzato L. (1997): Identification of Parametric Models, Springer, Paris, Milan, Barcelone
[471J Walter S., Lorimer G.H., Schmid F.X. (1996): A thermodynamic coupling mechanism for GroEImediated unfolding, Biochemistry, Vol. 93, 9425-9430
[472J Wang H., AI-Lawatia M., Sharpley R.C. (1999): A characteristic domain decomposition and spacetime local refinement method for first-order linear hyperbolic equations with interface, Numerical Methods for Partial Differential Equations, Vol. 15, No.1, 1-28
[473J Wang Z., Richards B.E. (1991): High resolution schemes for steady flow computation, Journal of Computational Physics, Vol. 97, 53-72
[474J Wansbrough R.W. (1985): Modeling chemical reactors, Chemical Engineering, Vol. 5, 95-102
[475J Watts D.G. (1981): An introduction to nonlinear least squares, in: Kinetic Data Analysis: Design and Analysis of Enzyme and Pharmacokinetic Experiments, L. Endrenyi ed., Plenum Press, New York, 1-24

REFERENCES 385
[476] Weinreb A., Bryson A.E.Jr. (1985): Optimal control of systems with hard control bounds, IEEE Transactions on Automatic Control, Vol. AC-30, 1135-1138
[477] Weizhong D., Nassar R. (1999): A finite difference scheme for solving the heat transport equation at the microscale, Numerical Methods for Partial Differential Equations, Vol. 15, No.6, 697-708
[478] Wen C.S., Yen T.F. (1977): Optimization of oil shale pyrolysis, Chemical Engineering Sciences, Vol. 32,346-349
[479] Williams M.L., Landel R.F., Ferry J.D. (1955): The temperature dependence of relaxation mechanisms in amorphous polymers and other glass-forming liquids, Journal of the American Chemical Society, Vol. 77, 3701-3706
[480] Williams J., Kalogiratou Z. (1993): Least squares and Chebyshev fitting for parameter estimation in ODE's, Advances in Computational Mathematics, Vol. 1, 357-366
[481] Willoughby, R.A. (1974): Stiff Differential Systems, Plenum Press, New York
[482] Widder D.V. (1941): The Laplace Transform, Princeton University Press
[483] Wolf M. (1994): Mathematisch-physikalische Berechnungs- und Simulationsmodelle zur Beschreibung und Entwicklung transdermaler Systeme, Habilitationsschrift, Mathematisch-Naturwissenschaftliche Fakultat, Universitat Bonn
[484] Wolf H., Sauerer B., Fasold D., Schlesinger V. (1994): Computer aided optimization of circular corrugated horns, Proceedings of the Progress in Electromagnetics Research Symposium, Noordwijk, The Netherlands
[485] Wolmott P., Dewynne J.N., Howison S.D. (1993): Option Pricing: Mathematical Models and Computation, Oxford Financial Press
[486] Wouwer A.V. (1994): Simulation, parameter and state estimation techniques for distributed parameter systems with real-time application to a multizone furnace, Dissertation, Faculte Poly technique de Mons, Belgium
[487] Yang H.Q., Przekwas A.J. (1992): A comparative study of advanced shock-capturing schemes applied to Burgers' equation, Journal of Computational Physics, Vol. 102, 139-159
[488] Yee H.C. (1985): Construction of a class of symmetric TVD schemes, Lectures in Applied Mathematics, Vol. 22, 381-395, Springer, Berlin
[489] Zachmanoglou E.C., Thoe D.W. (1986): Introduction to Partial Differential Equations with Applications, Dover, New York
[490] Zeeman E.C. (1972): Differential equations for the haertbeat and nerve impulse, in: Towards a Theoretical Biology, C.H. Waddington ed., Edinburgh University Press, Vol. 4, 8-67
[491] Zegeling P.A., Verwer J.G., van Eijkeren J.C.H. (1992): Application of a moving grid method to a class of Id brine transport problems in porous media, International Journal for Numerical Methods in Fluids, Vol. 15, 175-191
[492] Zhengfeng L., Osborne M.R., Prvan T. (2002): Parameter estimation of ordinary differential equations, to appear: IMA Journal of Numerical Analysis
[493] Zschieschang, T. Dresig, H. (1998): Zur Zeit-Prequenz-Analyse von Schwingungen in Antrieben von Verarbeitungsmaschinen, Fortschrittsberichte VDI, Nr. 1416, VDI, Dusseldorf, 489-506

Index
acetylene, 252, 254 acidification of groundwater pollution, 263 active constraints, 9, 19 active set, 15, 31 adiabatic transition of states, 245 advection-diffusion equation, 93 advection equation, 71, 86, 92, 95, 97-98, 156 advective-dispersive transport, 170 algebraic constraints, 53, 62, 65 algebraic equations, 20, 50-51, 78-79, 129, 153, 162,
239, 332, 349 algebraic variables, 50, 57, 61, 78-79, 129, 153, 331, 349 analytical expression, 337 antibody, 236 antigen, 236 Antoine equation, 250 approximation errors, 188 Arrhenius temperature, 270 assignment statements, 337 association constant, 236 augmented Lagrangian function, 16, 18, 33, automatic differentiation, 112, 216, 335
ADIFOR,109 code for derivatives, 109 elementary functions, 109 forward mode, 110, 113 Helmholtz energy function, 113 operator overloading, 109 reverse mode, 112-113 traps, 114 work ratio, 110, 113
badly scaled problem, 218 balance equation, 253 band structure, 77 bang-bang control, 132, 168, 175, 177 batch reactor, 130 Bessel functions, 278 beta-blocker, 177 BFGS formula, 17, 19,29 binary distillation column, 248 boiler, 248 boundary conditions, 67
boundary value problem, 80, 142, 164 Boussinesq coefficient, 276 Boussinesq velocity distribution, 273 Burgers' equation, 72, 157 Butcher array, 38-39, 41, 47, 64 cargo problem, 147 cell walls, 94, 99 centrifugal force, 239 CFL condition, 97 characteristic polynomial, 198, 213-214 Chezy formula, 274 Christoffel symbol, 239 circular horn, 278 coke deposition, 252, 254 comparative operators, 341 comparative performance evaluation, 216 compartmental model, 231 complex numbers, 283 conditional statements, 341 confidence intervals, 115-11 7, 211 conservation equation, 90 conservation of mass, 273 consistent initial values, 53-54, 60-64, 79, 130, 154,
159, 163, 332, 350, 353 constrained nonlinear least squares problem, 31 constraint qualification, 10-11, 19 constraints, 120, 127, 137-138, 170, 212-213 control function, 274 convection, 263 convective-diffusion equation, 72 convective-diffusive transport, 194 convex function, 9 convex set, 9 Corio lis force, 239 corrugated horn, 278, 280, 283 cost function, 175 coupled algebraic equations, 158, 163, 353 coupled algebraic variables, 159 coupled differential equations, 158, 209, 258, 299,
331-332, 350-353 coupling point, 160, 164 Courant number, 87, 91
387

388 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
covariance matrix, 211 cutaneous tissue, 208, 211, 257 cylindrical coordinates, 278-279 Darcy flow velocity, 170, data fitting, 1, 23, 33, 115,117,120-121,124
boundary values, 147 confidence intervals, 117 consistent initial values, 130 constraints, 120, 127, 138, 170 coupled ordinary differential equation, 159 differential algebraic equation, 129, 317, 349 Dirichlet boundary conditions, 151 dynamical constraints, 127, 140 explicit model function, 120, 288 initial values, 151 integration areas, 164 Laplace transformation, 125, 295 multiple shooting, 142 Neumann boundary conditions, 151 ordinary differential equation, 129, 299, 348 partial differential algebraic equation, 352 partial differential equation, 152, 320, 332, 350 residuals, 120 steady state system, 126, 296, 347 switching function, 134 switching points, 131
database, 285-286 degradation kinetics, 269 density, 266 descent direction, 27 deterministic methods, 183 DFNLP, 33, 37, 117, 121, 125, 127, 130, 132, 139, 144,
148, 152, 156, 159, 165, 169, 171, 177, 183, 188, 191, 193, 196, 199--200, 202, 204, 206, 211, 214-216, 218, 233, 240, 246, 250, 255, 260, 264, 267,271
DFP formula, 19 diagonal implicit Runge-Kutta method, 41 difference schemes, 81 differential algebraic equation, 157, differential algebraic equation, 48, 52, 55-56, 61, 130,
158, 317, 331, 349 consistent initial values, 60
index reduction, 52 constraints, 138 coupled, 163 drift effect, 55, 60 explicit formulation, 49, 62 implicit formulation, 48 implicit method, 62 index, 51-52 projected descriptor method, 59 variable initial time, 148
differential equations, 129, 299 differential variables, 50, 61, 78-79, 129, 153, 331, 349 diffusion, 70, 154, 259, 269 diffusion equation, 168, 208, 258, 260, 263 diffusion of a drug, 159 diffusion of molecules, 155
Dirichlet boundary conditions, 67, 75-76, 86, 269, 278, 320, 331, 351, 353
dispersion, 263 displacement of a beam, 80 disposition, 198 distillation column, 248 distributed parameter systems, 78, 153, 252 DN2GB, 185, 206, 216 donor, 257 DOPRI5, 132, 139, 203 drift effect, 55, 60 driving torque, 239 drug transport, 231 dry bulb temperature, 270 dry friction, 134-135 drying process, 269 DSLMDF,216 dual variable, 9, 18 dynamical constraints, 140, 171 dynamical inequality restrictions, 127, dynamical system, 1, 129, 134
boundary values, 146 constraints, 137 dynamical constraints, 140 flux function, 155 partial differential algebraic equation, 153 steady state, 126 variable initial time, 148
EASY-FIT, 109, 182, 216, 218, 285, 287 eigenfunctions, 279, 282 eigenmodes, 278 eigenvalue-eigenvector decomposition, 98-99 electrical displacement, 278 electromagnetic field, 278 elementary operations, 337 energy conservation, 269 ENO method, 93, 97-99, 276 enriching section, 248 enthalpies, 250 envelope function, 279--280 enzymatic interaction, 257 equality constraints, 120, 137, 143, 147 equations of motion, 48, 244 error messages, 342 errors on data, 195 essentially non-oscillatory scheme, 93 experimental data sets, 120, 151 explicit method, 39 explicit model function, 121, 288 exponential terms, 187 F -distribution, 116 far field, 279, 282, 284 feasible region, 8 feed, 248-249, 252, 254 first-order upwind scheme, 90 fitting criterion, 126 five-point-difference formula, 82 flow of a fluid, 71, 273 flow through soil, 263 flux formulation, 274

INDEX
flux function, 85, 93, 155, 350, 352 flux of the momentum, 273 food preservation, 269 formula of Stehfest, 108 forward accumulation, 110 forward differences, 129 forward mode, 110 fourth-order formula, 82 fourth-order partial differential equation, 80, 353 function identifier 1 336 GAB model equation, 270 Gauss-Newton method, 25-27, 31, 216 generalized constraint forces, 48, 53, 243 generation of Fortran code, 355-356 genetic algorithms, 183 GENFOR,355 glass transition temperature, 269 global convergence, 16, 18, 33 global solution, 183 Gordon-Taylor equation, 269 gravitational force, 239 groundwater flow, 263 heat capacity, 248, 254, 266-267 heat diffusion, 177 heat equation, 70, 79-80, 83, ~5, 102. 152, 173, 266, 351 heat transfer coefficient, 266 heaviside function, 71 Helmholtz energy function, 113 Hessian matrix, 8, 14, 17, 2:3 higher order partial differential equations: 78 holonomic constraint. 53, 243, 245 hot-air drying, 269 hot strip mill, 266 hydrogen ~toichiometry, 252 hyperboliC' conservation law, 98 hyperholic partial differential equation, 71, 85, 87, 93,
156 ideal gas law 1 254 identifiability, 192, 194, 211 ill~behaved model function, 188 ill~conditioned problern, 218 ill-posed, 194 irrlplicit boundary condition::;, 160 iUlplicit function theorem, 127 ilnplicit Runge~Kutta rnethod, 55, 63 implicit solution method, 63 in~vitro experiment, 259 incompressible fluid, 273 inconsistent constraints, 15-16, 200 INDDIR, 43, 47, 129, 140. 204 index set, 335 index variable, 335, 337 index
of a differential algebraic equation, 52 differential index, 52 index~l~system, 79, 130, 154, 317 index~l~variables, 63-64 index~2~system, 130 index~2~variables, 63-64 index~3~system, 130
index~3~variables, 63-64 index 1, 51, 58, 61-62 index 2, 53 index 3, 53-54, 56, 62 of an algebraic differential equation, 51 partial differential algebraic equations, 79 reduction, 53 ~55
inequality constraints, 120, 137 inertia tensor, 240 inflow, 274 initial time, 128
389
initial values, 38, 48, 54, 67, 78, 128-130, 163, 299, 317, 320, 331, 348-349, 351
input feed, 132 integer constant, 335 integral, 342 INTELSAT satellite, 278 internal numerical differentiation, 46-47, 129 intravenous bolus, 198 intrinsic functions, 337 inverse problern, 194 Jacobian matrix, 8, 23, 42, 44, 126, 130. 145 Karush~Kuhn~Tucker condition, 11 kinematic joint, 243 kinetic process, 105, 125, 198 lag time, 132 Lagrange~Hamilton principle, 48 Lagrangian function, 9, 14, 17, 28, 48 Lagrangian multipliers, 9, 49, Laplace transformation, 104-105, 107, 124, 198, 213,
295 back~transformation, 107, 2]4 diffusion equation, 105 formula of Stehfest, 107, 124 gradient, 108 inverse operator, 107 linear differential equation, 104, 107 linear partial differential equatioIl, 105 numerical quadrature, 107
large residuals, 190 least squares problem, 1. 23. 25, 27, 31, 119-120, 144,
190, 216 Levenberg~I'vlarquardt algorithm, 26 ligand, 236 line search, 14, 16-17, 218, 283 linear compartlnental modeL 1:-31, 133, 198 linear differential equation. 44-45, 104, 198,213-214,
232 linear least squares problem, 25, 31 linear regression analysis, 1] 5 Lipschitz continuous, 25 lithium~bromide, 263 local characteristic flux, 99 local convergence, 18, 33 local minimum, 9, 12, 18 local solution, 183-184 Lotka-Volterra equation, 143 macro, 336, 339 magnetic induction, 278 maltodextrin, 270~-271

390 NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
l\,lanning number, 273, 276 Manutec r3, 239 mass balance, 194, 208-209, 231, 249 rnass equilibrium, 236 mass matrix, 48, 53, 57, 239, 243 mass oscillator, 135 maxirnum likelihood estimation, 23 l\laxwell's equations, 278, 280 merit function, 16, 18, 33 nletabolisru, 208, 211, 257 methane, 250, 252 method of lines, 74, 77, 86, 94, 103, 152, 157-158, 164,
321 Michaelis-Menten effect, 208, 233, 257 .rvIicrosoft Access, 285 minimum-norm objective function, 61 MODFIT, 182,219, 285 llloisture content, 269 moments of inertia, 245 rnultibody system, 48, 52-54, 56, 60, 134, 239, 243, 245 multiple dose administration, 233 multiple shooting, 142 multiplier, 14 natural gas, 252, 254 network of channels, 274 Neurnann boundary conditions, 67, 75, 77, 266, 269,
278, 320, 331, 351, 353 Neumann functions, 278 Neville scheme, 84 Newton's method, 20-21, 24, 30, 42, 61-62, 79, 159, 163 Newton interpolation, 94-95 NLPQL, 19, 22, 30-31, 36, 62, 154, 179, 216, 238 NLSNIP,216 noise in data, 183 non-differentiable model function, 201 non-homogeneous equation, 93 non-smooth model function, 202 non-unique solution, 185 nonlinear equations, 20-21, 61, 296 nonlinear hyperbolic equations, 99 nonlinear program, 7, 21-22, 31, 61 nonlinear regression, 115 nonn
maximurn of absolute values, 35, 119, 129, 152, 170 sum of absolute values, 35, 119, 129, 152, 170 surn of squared values, 23, 119, 128, 152, 169
normal distribution, 115 normal equations, 25, 116 normally distributed error, 287 numerical stability, 190 one-parameter TVD family, 91 optimal control problem, 142, 147, 175 optimality conditiolls, 8,10-11,12,14-15,23,29,33, optimality, 10
Karush-Kuhn-Tucker condition, 11, 14, 16, 18 necessary 2nd order optimality conditions, 11 optimality condition, 15, 24 sufficient 2nd order optimality conditions, 12
optimization problem, 7, ordinary differential equation, 38, 43, 46, 63, 299, 348
boundary values, 147 Butcher array, 39 constraints, 138 coupled, 163 discontinuity, 134 explicit method, 39 global error, 39 implicit method, 41 order, 39 Radau method, 42 sensitivity equation, 44 shooting method, 143 stiff equation, 41 switching points, 131 variable initial time, 148
ordinary least squares estimator, 115 oscillating model function, 206 outflow, 274 output least squares problem, 194 overdetermined model, 184, 210-211 oxygen, 252, 254 parabolic partial differential equation, 70, 104, 160 parameter, 335 parameter estimation, 1, 33, 115, 126, 288, 295-296,
299, 317, 321, 332, partial differential algebraic equation, 78, 153, 169, 331,
352 advection, 157 algebraic variables, 79 boundary conditions, 153, 158 consistent boundary conditions, 153 consistent initial values, 79, 154 constraints, 170 coupled differential algebraic equation, 158, 332 differential variables, 79 explicit formulation, 153, 158 flux function, 155 index-I-system, 154 index, 79 initial values, 78-79, 153, 158, 163 switching points, 168 transition conditions, 163 transition points, 162,
partial differential equation, 66, 158, 274, 320, 350 boundary conditions, 67 constraints, 170 coupled ordinary differential equation, 158, 332 explicit formulation, 67 flux formulation, 85 hyperbolic-parabolic, 72 hyperbolic, 71 inconsistent boundary conditions, 68 initial values, 67, 163 method of lines, 74 parabolic, 70 second-order hyperbolic, 71 sensitivity equations, 101 solution, 68 switching points, 168 transition conditions, 163

INDEX
tran~ition points, 162 PCOMP, 109, 113, 182, 216, 285, 335-337, 345, 348,
351, 355 PDEFIT, 182,219, 285 penalty function, 16 performance results, 218 pernleation of substrate, 208, 257 pharnlaceutical system, 177 pharnlacodynamic process, 149 pharmacokinetic model, 131-132, 198, 213-214, 231 piecewise constant interpolation, 336, 338 piecewise linear interpolation, 336, 338 plain pendulum, 49-50, 54, 59. 62, 64 pneumatic spring, 245 polynomial interpolation, 134 population dynamics, 139 porous media. 170, 194 predator and prey, 143 primal variable, 9, 18 product over index set, 340 projected descriptor forrn, 62 projected descriptor method, 55, 59 propagation constant, 278 propagation of discontinuities, 71 propagation of shocks, 156 propane, 250 quadratic convergence, 25 quadratic programming ~ubproblern, 14 17, 21, 28 29,
32 quadrature formula, 124 quasi~Ncwton fornlllla, 17-19, 21, 27, 29 Radau method, 42 RADAU5, 42-43, 55, 60, 64, 83, 88, 97, 102, 106, 130,
136, 142, 148, 152, 156, 1,59, 16,5, 169, 171, 177, 193, 218, 233, 240, 246, 250, 255, 260, 264, 267, 271
radio frequency, 2713 radioimmunological detenninatioll, 237 reaction equation~, 2.52 reaction rates. 253 real con~tant, ;)35 receiver. 257 receptor-ligand binding, 21, 127, 347 rectangular channeL 273 reflux druIn, 248 regression variable, 115 residual, ] 20 return loss, 283 reverse accuIIlulation, 112, 355 reverse mode, 112 rigid bodies, 239 robot, 239 Roe speed, 90, 94, 99 rolling mill, 266 rotational joints, 239 rubbery state, 269 Runge-Kutta method, 38, 42, 46 s,g,;" 192-193 s,!'i.,192 s,u,i., 192-193
Saint-Venant equations, 273 scaling, 190--192 scattering matrix, 280, 282 SDIRK4, 42-43 search direction, 21, 24 second-order derivative approximation, 82 Recond-order formula, 81 oen,itivity equation, 44, 46-47, 101, 103, 129 Reparation process, 248 ~equential quadratic programming, 14-15, 2] 1 62 shock-capturing schemes, 90 ,;hocks, 86 shooting method, 144-145 shooting points, 142 Simpson's rule, 342 simulated annealing, 183 ~low convergence, 186, 188-189 sorption isotherm, 170 1 194 space antenna, 278 spatial discretization, 74 spline interpolation, 336, 338 SQP method, 14, 16-19, 21-22, 27, 29-31 starting point, 189 static equilibrium, 244 steady state, 208-209, 260, 263
391
'tcady state sy,tem, 20, 126 127, 1:30, 16,5, 2:,6, 296 steepest descent, 18 Stefan-Boltzmann con~tant, 266 steplength, 14, 16, 21, 25, 29, 283 stiff differential equation, 41, 43 stochastic search, 183 stripping section, 248 structurally globally identifiable, 192 structurally locally identifiable, 192 structurally non-identifiable, 192 sum over index set, 340 superlinear convergence, 17, 19, 3:3. 205 suspension element, 24:3, 245 switching function, 134 switching points, 131, 149, 167, 267 switching times 1 135-130 systeln of algebraic equations, 198 systcrn of differential algebraic equations, 48-49, 243,
317, 331, 349 system of hyperbolic equation~, 99, 276 system of nonlinear equations, 20 21. 62, 64,120-127,
159, 163, 296, 347 systeln of ordinary differential equations, 38, 44, 12t5,
253, 299, 348 s)rstem of partial differential algebraic equations, 78,
331 system of partial differential equations, 67, 320 system of time-dependent partial differential equation~.
98 t-distribution, ] 16 table, 335 tabu search, 183 Taylor approximation, 30 termination tolerances, 218 teot problems, 216, 218, 287

392
time-optimal, 178 top-down classification, 193 tracer experiment, 263 transdermal process, 257 transition conditions, 163 transport equation, 194 transportation, 71 transportive flux, 90 truck, 243 trust region method, 27 tubular reactor, 252 two-sided difference formula, 86 underflow gate, 274
NUMERICAL DATA FITTING IN DYNAMICAL SYSTEMS
uniformly distributed error, 287 universal gas constant, 250 upwind formulae, 85, 91, 156 upwind scheme, 89 van der Pol's equation, 349 variable, 336 variable initial time, 148 variable switching point, 132 variational equation, 44, 46 volatility, 248, 250 water-mass fraction, 270 water activity, 270-271 wave equation, 72, 76, 100, 278 wave guide, 278-280, 283

Applied Optimization
18. O. Maimon, E. Khmelnitsky and K. Kogan: Optimal Flow Control in Manufacturing. Production Planning and Scheduling. 1998 ISBN 0-7923-5106-1
19. C. Zopounidis and P.M. Pardalos (eds.): Managing in Uncertainty: Theory and Prac-tice.1998 ISBNO-7923-5110-X
20. A.S. Belenky: Operations Research in Transportation Systems: Ideas and Schemes of Optimization Methods for Strategic Planning and Operations Management. 1998
ISBN 0-7923-5157-6
21. J. Gil-Aluja: Investment in Uncertainty. 1999 ISBN 0-7923-5296-3
22. M. Fukushima and L. Qi (eds.): Reformulation: Nonsmooth, Piecewise Smooth, Semismooth and Smooting Methods. 1999 ISBN 0-7923-5320-X
23. M. Patriksson: Nonlinear Programming and Variational Inequality Problems. A Uni-fied Approach. 1999 ISBN 0-7923-5455-9
24. R. De Leone, A. Murli, P.M. Pardalos and G. Toraldo (eds.): High Performance Algorithms and Software in Nonlinear Optimization. 1999 ISBN 0-7923-5483-4
25. A. Schobel: Locating Lines and Hyperplanes. Theory and Algorithms. 1999 ISBN 0-7923-5559-8
26. R.B. Statnikov: Multicriteria Design. Optimization and Identification. 1999 ISBN 0-7923-5560-1
27. V. Tsurkov and A. Mironov: Minimax under Transportation Constrains. 1999 ISBN 0-7923-5609-8
28. V.I. Ivanov: Model Development and Optimization. 1999 ISBN 0-7923-5610-1
29. EA. Lootsma: Multi-Criteria Decision Analysis via Ratio and Difference Judgement. 1999 ISBN 0-7923-5669-1
30. A. Eberhard, R. Hill, D. Ralph and B.M. Glover (eds.): Progress in Optimization. Contributions from Australasia. 1999 ISBN 0-7923-5733-7
31. T. Hiirlimann: Mathematical Modeling and Optimization. An Essay for the Design of Computer-Based Modeling Tools. 1999 ISBN 0-7923-5927-5
32. J. Gil-Aluja: Elements for a Theory of Decision in Uncertainty. 1999 ISBN 0-7923-5987-9
33. H. Frenk, K. Roos, T. Tedaky and S. Zhang (eds.): High Performance Optimization. 1999 ISBN 0-7923-6013-3
34. N. Hritonenko and Y. Yatsenko: Mathematical Modeling in Economics, Ecology and the Environment. 1999 ISBN 0-7923-6015-X
35. J. VIrant: Design Considerations of TIme in Fuzzy Systems. 2000 ISBN 0-7923-6100-8

Applied Optimization
36. G. Oi Pillo and F. Giannessi (eds.): Nonlinear Optimization and Related Topics. 2000 ISBN 0-7923-6109-1
37. V. Tsurkov: Hierarchical Optimization and Mathematical Physics. 2000 ISBN 0-7923-6175-X
38. C. Zopounidis and M. Ooumpos: Intelligent Decision Aiding Systems Based on Multiple Criteriafor Financial Engineering. 2000 ISBN 0-7923-6273-X
39. X. Yang, A.1. Moos, M. Fisher and L.Jennings (eds.): Progress in Optimization. Contributions from Australasia. 2000 ISBN 0-7923-6286-1
40. O. Butnariu and A.N. Iusem: Totally Convex Functions for Fixed Points Computation and Infinite Dimensional Optimization. 2000 ISBN 0-7923-6287-X
41. J. Mockus: A Set of Examples of Global and Discrete Optimization. Applications of Bayesian Heuristic Approach. 2000 ISBN 0-7923-6359-0
42. H. Neunzert and A.H. Siddiqi: Topics in Industrial Mathematics. Case Studies and Related Mathematical Methods. 2000 ISBN 0-7923-6417-1
43. K. Kogan and E. Khmelnitsky: Scheduling: Control-Based Theory and Polynomial-Time Algorithms. 2000 ISBN 0-7923-6486-4
44. E. Triantaphyllou: Multi-Criteria Decision Making Methods. A Comparative Study. 2000 ISBN 0-7923-6607-7
45. S.H. Zanakis, G. Ooukidis and C. Zopounidis (eds.): Decision Making: Recent Devel-opments and Worldwide Applications. 2000 ISBN 0-7923-6621-2
46. G.E. Stavroulakis: Inverse and Crack Identification Problems in Engineering Mech-anics. 2000 ISBN 0-7923-6690-5
47. A. Rubinov and B. Glover (eds.): Optimization and Related Topics. 2001 ISBN 0-7923-6732-4
48. M. Pursulaand J. Niittymiiki (eds.): MathematicalMethods on Optimization in Trans-portation Systems. 2000 ISBN 0-7923-6774-X
49. E. Cascetta: Transportation Systems Engineering: Theory and Methods. 2001 ISBN 0-7923-6792-8
50. M.e. Ferris, O.L. Mangasarian and J.-S. Pang (eds.): Complementarity: Applications, Algorithms and Extensions. 2001 ISBN 0-7923-6816-9
51. V. Tsurkov: Large-scale Optimization - Problems and Methods. 2001 ISBN 0-7923-6817-7
52. X. Yang, K.L. Teo and L. Caccetta (eds.): Optimization Methods and Applications. 2001 ISBN 0-7923-6866-5
53. S.M. Stefanov: Separable Programming Theory and Methods. 2001 ISBN 0-7923-6882-7

Applied Optimization
54. S.P. Uryasev and P.M. Pardalos (eds.): Stochastic Optimization: Algorithms and Applications. 2001 ISBN 0-7923-6951-3
55. J. Gil-Aluja (ed.): Handbook of Management under Uncertainty. 2001 ISBN 0-7923-7025-2
56. B.-N. Yo, A. Cantoni and K.L. Teo: Filter Design with Time Domain Mask Con-straints: Theory and Applications. 2001 ISBN 0-7923-7138-0
57. S. Zlobec: Stable Parametric Programming. 2001 ISBN 0-7923-7139-9
58. M.G. Nicholls, S. Clarke and B. Lehaney (eds.): Mixed-Mode Modelling: Mixing Methodologies for Organisational Intervention. 2001 ISBN 0-7923-7151-8
59. F. Giannessi, P.M. Pardalos and T. Rapcsak (eds.): Optimization Theory. Recent Developments from Mti.trahtiza. 2001 ISBN 1-4020-0009-X
60. K.M. Hangos, R. Lakner and M. Gerzson: Intelligent Control Systems. An Introduc-tion with Examples. 2001 ISBN 1-4020-0134-7
61. D. Gstach: Estimating Output-Specific Efficiencies. 2002 ISBN 1-4020-0483-4
62. J. Geunes, P.M. Pardalos and H.E. Romeijn (eds.): Supply Chain Management: Models, Applications, and Research Directions. 2002 ISBN 1-4020-0487-7
63. M. Gendreau and P. Marcotte (eds.): Transportation and Network Analysis: Current Trends. Miscellanea in Honor of Michael Florian. 2002 ISBN 1-4020-0488-5
64. M. Patriksson and M. Labbe (eds.): Transportation Planning. State of the Art. 2002 ISBN 1-4020-0546-6
65. E. de Klerk: Aspects of Semidefinite Programming. Interior Point Algorithms and Selected Applications. 2002 ISBN 1-4020-0547-4
66. R. Murphey and P.M. Pardalos (eds.): Cooperative Control and Optimization. 2002 ISBN 1-4020-0549-0
67. R. Correa, I. Dutra, M. Fiallos and F. Gomes (eds.): Modelsfor Parallel and Distributed Computation. Theory, Algorithmic Techniques and Applications. 2002
ISBN 1-4020-0623-3
68. G. Cristescu and L. Lup§a: Non-Connected Convexities and Applications. 2002 ISBN 1-4020-0624-1
69. S.1. Lyashko: Generalized Optimal Control of Linear Systems with Distributed Para-meters. 2002 ISBN 1-4020-0625-X
70. P.M. Pardalos and Y.K. Tsitsiringos (eds.): Financial Engineering, E-commerce and Supply Chain. 2002 ISBN 1-4020-0640-3
71. P.S. Knopov and E.J. Kasitskaya: Empirical Estimates in Stochastic Optimization and Indentification. 2002 ISBN 1-4020-0707-8

Applied Optimization
72. A.H. Siddiqi and M. Kocvara (eds.): Trends in Industrial and Applied Mathematics. Proceedings of the 1 st International Conference on Industrial and Applied Mathematics of the Indian Subcontinent. 2002 ISBN 1-4020-0751-5
73. M. Doumpos and C. Zopounidis: Multicriteria Decision Aid Classification Methods. 2002 ISBN 1-4020-0805-8
74. E.J. Kontoghiorghes, B. Rustem and S. Siokos (eds.): Computational Methods in Decision-Making, Economics and Finance. 2002 ISBN 1-4020-0839-2
75. J. Dupacovli, J. Hurt and J. Stepan: Stochastic Modeling in Economics and Finance. 2002 ISBN 1-4020-0840-6
76. Bing-Yuan Cao: Fuzzy Geometric Programming. 2002 ISBN 1-4020-0876-7
77. K. Schittkowski: Numerical Data Fitting in Dynamical Systems. A Practical Intro-duction with Applications and Software. 2002 ISBN 1-4020-1079-6
KLUWER ACADEMIC PUBLISHERS - DORDRECHT I BOSTON I LONDON




















