
Study of Stability Analysis of a Grid-Connected Doubly Fed ...

Active control of large amplitude vibrations of smartmagneto–electro–elastic doubly curved shells
S. C. Kattimani • M. C. Ray
Received: 19 February 2014 / Accepted: 4 March 2014
� Springer Science+Business Media Dordrecht 2014
Abstract This paper deals with the analysis of active
constrained layer damping (ACLD) of large amplitude
vibrations of smart magneto–electro–elastic (MEE)
doubly curved shells. The constraining layer of the
ACLD treatment is composed of the vertically/
obliquely reinforced 1–3 piezoelectric composite
(PZC). The constrained viscoelastic layer of the
ACLD treatment is modeled by using the Golla–
Hughes–McTavish method in the time domain. A
three-dimensional finite element model of the overall
smart MEE doubly curved shells has been developed
taking into account the effects of electro–elastic and
magneto–elastic couplings, while the von Karman
type nonlinear strain displacement relations are used
for incorporating the geometric nonlinearity. Influence
of the curvature ratio, the curvature aspect ratio, the
thickness aspect ratio on the nonlinear frequency
ratios of the MEE doubly curved shells has been
investigated. Effects of the location of the ACLD
patches and the edge boundary conditions on the
control of geometrically nonlinear vibrations of
paraboloid and hyperboloid MEE shells have been
studied. Particular attention has been paid to investi-
gate the performance of the ACLD treatment due to
the variation of the piezoelectric fiber orientation
angle in the 1–3 PZC constraining layer of the ACLD
treatment.
Keywords Magneto–electro–elastic � Active
constrained layer damping (ACLD) � Doubly
curved shells � Piezoelectric composites �Geometrically nonlinear vibrations
1 Introduction
Comprehensive research carried out over the recent
decades reveals that the piezoelectric materials have
been widely used as smart sensors and actuators. The
structures integrated with such piezoelectric sensors
and actuators possess self sensing, self monitoring and
diagnosing capabilities and are commonly known as
smart structures. Piezoelectric actuators can produce
the strain in the order of 1,000 micro strain and within
the linear range actuation strain is proportional to the
applied electric field/voltage. These features make
them attractive for exploiting them in case of active
control of the stability, shape, noise and vibrations of
high-functioning lightweight flexible structures
(Newnham et al. 1980; Bailey and Hubbard 1985;
Crawley and Luis 1987; Azvine et al. 1995; Moita
et al. 2002; Gao and Shen 2003; Kulkarni and Bajoria
2006; Damanpack et al. 2013). However, monolithic
piezoelectric materials possess low coupling coeffi-
cients and require high control voltage for satisfactory
S. C. Kattimani � M. C. Ray (&)
Department of Mechanical Engineering, Indian Institute
of Technology, Kharagpur 721302, India
e-mail: [email protected]
123
Int J Mech Mater Des
DOI 10.1007/s10999-014-9252-3

control of vibrations of host structures. To mitigate the
drawbacks of these low-control-authority monolithic
piezoelectric materials, the active constrained layer
damping (ACLD) treatment has been developed (Baz
and Ro 1996; Baz 1998). In a typical ACLD treatment,
the performance of the passive constrained layer
damping (PCLD) treatment is appreciably improved
by replacing the passive constraining layer with an
active constraining layer made of piezoelectric mate-
rials. The constrained layer is made of the viscoelastic
material and sandwiched between the host structure
(substrate) and the active piezoelectric constraining
layer. The performance of the low control authority
piezoelectric materials for attenuating the vibrations is
improved significantly when they are used as the
constraining layer of the ACLD treatment rather than
when they are directly attached to the base structure.
Also, if the constraining layer of the ACLD treatment
is not activated with applied voltages, the ACLD
treatment turns into the PCLD treatment. Thus, the
simultaneous passive and active damping can be
achieved by the ACLD treatment when under opera-
tion (Baz and Ro 1996). The successful experimental
work on the ACLD treatment (Baz and Ro 1996) has
motivated the researchers to carry out further inves-
tigation on the use of the ACLD treatment for smart
structures. Ray et al. (2001) experimentally and
theoretically analyzed the ACLD of cylindrical shell.
Chantalakhana and Stanway (2001) investigated the
performance of the ACLD treatment for clamped–
clamped plate. Lim et al. (2002) developed the closed
loop finite element modeling of ACLD for time
domain analysis. Illaire and Kropp (2005) studied the
quantification of damping mechanisms of active
constrained layer treatments. In recent decades, Ray
and his co-researchers (Ray and Mallik 2005; Ray and
Pradhan 2006; Ray and Faye 2009; Sarangi and Ray
2010; Kanasogi and Ray 2013; Kumar and Ray 2013)
have been performing the extensive research on the
performance of the ACLD treatment for active damp-
ing of linear and nonlinear vibrations of smart
structures and they established that the damping
characteristics of these structures can be improved
significantly by using 1–3 piezoelectric composites
(PZC) as the materials of the constraining layer of the
ACLD treatment.
An exceptional class of smart laminated composites
made of piezoelectric and magnetostrictive materials is
known as the magneto–electro–elastic (MEE) or
multiferroic composites. The MEE composites have
the capability to transform energy among magnetic,
electric and mechanical energies. These composites
earned significant interest of the researchers in recent
years because of the promising properties for the
applications in sensors, actuators, transducers, space
structures, sonar applications, ultrasonic imaging
devices etc. These composites possesses very high
electromechanical coupling effect when used in layered
forms than the bulk/fiber form due to the absence of
leakage current and the ease of poling to align the
electric dipoles (Bichurin et al. 2003). Research
concerned with the coupled electro-magnetic effect in
the elastic media has received the attention of the
researchers (Van Den Boomgaard et al. 1976; Nan
1994; Pan 2001). Pan (2001) obtained the exact solution
of simply supported multilayered MEE plates under
surface and internal loads by using modified Stroh
formalism and propagator matrix method. The same
approach was extended to the free vibration analysis by
Pan and Heyliger (2002). Buchanan (2004) computed
the natural frequencies of vibration for the MEE layered
infinite plates. Hou and Leung (2004) studied the
transient response of the MEE hollow cylinders
subjected to dynamic loads. Wang and Ding (2007)
investigated the radial vibration of piezoelectric/
magnetostrictive composite hollow sphere. Daga et al.
(2008) studied the transient response of MEE cylinder
by semi-analytical finite element method. Bhangale and
Ganesan (2005) carried out the free vibration analysis
of functionally graded (FG) MEE cylindrical shells by
the finite element method while Ramirez et al. (2006)
used the discrete layer method to study the free
vibrations of FG MEE plate. Tsai et al. (2008) presented
the static analysis of three-dimensional doubly curved
FG MEE shells by an asymptotic approach. The finite
element model based on a higher order shear deforma-
tion theory for static and free vibration analysis of MEE
plates has been developed by Moita et al. (2009).
Pradhan (2009) presented the analytical solutions for
FG shells with embedded magnetostrictive layers and
studied the vibration characteristics using higher order
shear deformation theory. Liu and Chang (2010)
derived the closed form expressions for the transverse
vibrations of MEE thin plates and presented the natural
frequencies for two-layered MEE plate. Qin (2010)
investigated a circular cylindrical shell made of trans-
versely isotropic, non-ferromagnetic, perfectly electro-
conductive material immersed in an axially aligned
S. C. Kattimani, M. C. Ray
123

magnetic fields and a thermal field. Wu and Tsai (2010)
investigated the dynamic responses of FG MEE shells
using the method of multiple scales. Lang and Xuewu
(2012) carried out the buckling and vibration analysis of
FG magneto–electro–thermo-elastic circular cylindri-
cal shell by considering the mechanical, electric,
magnetic and thermal coupling effects. Badri and Al-
Kayiem (2012) developed the model for dynamic
analysis of piezolaminated shell structure with embed-
ded smart material lamina and influenced by magneto–
thermo–electro–elastic load. Loja et al. (2014) imple-
mented the differential evolution technique for optimi-
zation of MEE composite structures. Milazzo (2013)
analyzed the large deflection of MEE laminated plates
using first order shear deformation theory and von
Karman stress function approach. Although, MEE
structures have gained remarkable attention of the
researchers in recent years, very few research on the
large deflection analysis of MEE plates have been
reported in the literature. Xue et al. (2011) presented an
analytical solution for the large-deflection of rectangu-
lar MEE thin plate under the action of a transverse static
mechanical load. Sladek et al. (2013) presented the
mesh-less local Petrov–Galerkin method for the ana-
lysis of large deformation of MEE thick plates under
static and time-harmonic mechanical load and station-
ary electromagnetic load. Most recently, carrying out a
finite element analysis, Alaimo et al. (2013) proposed
an equivalent single-layer model for the large deflection
analysis of multilayered MEE laminates. From the
literature discussed above and to the author’s best
knowledge, it appears that no work has been reported on
the analysis of geometrically non linear vibrations of
MEE doubly curved shells. Although, the 1–3 PZCs are
commercially available and implemented for active
control of structures made of conventional materials
and composite materials, the active control of large
amplitude vibrations of the MEE shells using such
PZCs has not yet been reported in the open literature.
Consequently, in the present study, the performance of
the vertically/obliquely reinforced 1–3 PZCs as the
materials of the constraining layer of the ACLD
treatment to accomplish the task of active damping of
geometrically nonlinear vibrations of the smart MEE
doubly curved shells has been investigated. For such
investigation, three dimensional analysis of the ACLD
of MEE shells integrated with the patches of the ACLD
treatment has been carried out by the finite element
method. The effects of various parameters such as the
curvature ratio, the curvature aspect ratio, the thickness
aspect ratio, the coupling coefficients, the boundary
conditions and the variation of the piezoelectric fiber
orientation angle in the 1–3 PZC constraining layer on
the attenuation of geometrically nonlinear vibrations of
the MEE doubly curved shells have been thoroughly
investigated.
2 Problem description and governing equations
A MEE doubly curved shell integrated with a patch of
the ACLD treatment on its top surface is schematically
illustrated in Fig. 1(a). The curvilinear length, the
curvilinear width and the total thickness of the MEE
shell are a, b and H, respectively. Radii of curvature of
the middle surface are assumed to be R1 and R2. The
thickness of the constraining piezoelectric layer and the
constrained viscoelastic layer of the ACLD treatment
are hp and hv, respectively. The substrate of this MEE
shell consists of three layers. The commonly preferred
layer sequences for the MEE structures used in the
literature are P/M/P and M/P/M in which P stands for
the piezoelectric material like BaTiO3 (Barium Tita-
nate) and M stands for the magnetostrictive material
such as CoFe2O4 (Cobalt Ferrite) indicating the top/
middle/bottom layers. The origin of the curvilinear
coordinate system (xyz) is fixed at one corner of the
mid-plane of the middle layer, such that the curvilinear
lines x = 0 and a and y = 0 and b represent the
boundaries of the mid-plane of the substrate. The
constrained viscoelastic layer is sandwiched between
the host MEE substrate and the constraining layer of the
ACLD treatment. The constraining layer of the ACLD
treatment is made of the vertically/obliquely reinforced
1–3 PZC material. A layer of the vertical/obliquely
reinforced 1–3 PZC material is also illustrated in
Fig. 1(c) wherein the piezoelectric fibers are coplanar
with the xz plane while their orientation angle with the
z-axis is k. Although not shown here, the piezoelectric
fibers can be coplanar with the yz-plane and their
orientation angle with the z-axis is k. In case of the
obliquely reinforced 1–3 PZC, the orientation angle (k)
is nonzero while it is zero for the vertically reinforced
1–3 PZC as shown in Fig. 1(d). Since, the overall
structure is made of layers of dissimilar materials, the
kinematics of deformations of the overall structure
cannot be described by an equivalent single layer
displacement theory because of the fact that the elastic
Active control of large amplitude vibrations
123

properties of the adjacent continua of differ in orders.
Figures 2 (a) and (b) illustrate the schematic represen-
tation of the kinematics of deformations of the unde-
formed transverse normal in the xz- and the yz-planes,
respectively. The rotations of the portions of the normal
lying in the substrate shell, the viscoelastic layer and the
piezoelectric layer are represented by hx, /x and cx,
respectively in the xz-plane, while hy, /y and cy
represent the same in the yz-plane. Accordingly, the
axial displacements u and v of any point in the overall
shell along the x- and y-directions, respectively, can be
written as:
uðx; y; z; tÞ ¼ u0ðx; y; tÞ þ z� z� h
2
� �� �� �
hxðx; y; tÞ þ z� h
2
� �� z� hNþ2h i
� �/xðx; y; tÞ
þ hz� hNþ2icxðx; y; tÞð1Þ
vðx; y; z; tÞ ¼ v0ðx; y; tÞ þ z� z� h
2
� �� �hyðx; y; tÞ
þ z� h
2
� �� hz� hNþ2i
� �/yðx; y; tÞ
þ hz� hNþ2icyðx; y; tÞ ð2Þ
in which the brackets h i are used to define the
appropriate singularity functions such that the conti-
nuity of the displacement is satisfied at the interface
between the viscoelastic layer and the PZC layer or
between the substrate shell and the viscoelastic layer.
In order to utilize the vertical actuation by the active
constraining layer of the ACLD treatment and to
achieve the accurate results a high order transverse
deformation theory has been assumed for the overall
shell as follows:
wðx; y; z; tÞ ¼ w0ðx; y; tÞ þ zhzðx; y; tÞ þ z2/zðx; y; tÞð3Þ
Fig. 1 Schematic representation of a MEE doubly curved shell: a integrated with a single patch, b integrated with two patches at edges,
c obliquely reinforced 1–3 PZC composites, d vertically reinforced 1–3 PZC composites
S. C. Kattimani, M. C. Ray
123

In Eqs. (1)–(3), u0, v0 and w0 are the translational
displacements at any point on the mid-plane of the
substrate along x-, y- and z-directions, respectively,
with hz and /z being the generalized rotational
displacements. To facilitate the computation, the
rotational variables {dr} are separated from the
translational displacement variables {dt} as follows:
dtf g ¼ u0 v0 w0½ �T and
drf g ¼ hx hy hz /x /y /z cx cy
h iT
ð4Þ
For alleviating the shear locking in thin structures
and computing the element stiffness matrices
concerned with the transverse shear deformations
in an explicit manner, the selective integration rule
should be utilized. In order to accomplish this
task, the state of strain at any point in the overall
shell is expressed by the strain vector {eb}
containing in-plane strains and transverse normal
strain and the vector {es} of transverse shear strains
as follows:
ebf g ¼ ex ey ez exyf g and esf g ¼ exz eyzf gð5Þ
in which ex, ey and ez are the normal strains along x-,
y- and z-directions, respectively; exy is the in-plane
shear strain, exz and eyz are the transverse shear strains.
Making use of the von Karman type nonlinear strain–
displacement relations, the strain vectors defining the
state of in-plane and transverse normal strains at any
point in the MEE shell and the piezoelectric actuator
layer, respectively, can be expressed as:
ekb
� �¼ ebtf g þ z1½ � erbf g þ etbnf g; k ¼ 1; 2; 3
ekb
� �¼ ebtf g þ z2½ � erbf g þ etbnf g; k ¼ 5 ð6Þ
Here, k designates the layer number starting from the
bottom layer of the overall shell. The strain vectors
representing the state of transverse shear strains at any
point in the substrate, the viscoelastic layer and the
piezoelectric actuator layer, respectively, can be stated as
follows:
eks
� �¼ etsf g þ z3½ � ersf g; k ¼ 1; 2; 3
eks
� �¼ etsf g þ z4½ � ersf g; k ¼ 4 and
eks
� �¼ etsf g þ z5½ � ersf g; k ¼ 5
ð7Þ
The transformation matrices [Z1]–[Z5] appearing in
Eqs. (6) and (7) are presented in the Appendix 1,
whereas the generalized strain vectors in Eqs. (6) and
(7) are given by
ebtf g ¼ ou0
oxþ w
R1
ov0
oyþ w
R2
ou0
oyþ ov0
ox0
h iT
;
etsf g ¼ ow0
ox� u0
R1
ow0
oy �v0
R2
h iT
;
erbf g ¼ohx
ox
ohy
oyohx
oy þohy
oxhz /z
o/x
ox
o/y
oy
o/x
oy þo/y
oxocx
ox
ocy
oyocx
oy þocy
ox
24
35;
etbnf g ¼ 1
2dw0
dx
� 2 dw0
dy
�2
0 2 dw0
dx
� dw0
dy
�� T
and
ersf g ¼ hx hy /x /y cx cyohz
oxohz
oyo/z
oxo/z
oy
h i
ð8Þ
Fig. 2 Kinematics of deformations of the MEE doubly curved shell integrated with the ACLD patch: a transverse cross section parallel
to xz-plane, b transverse cross section parallel to yz-plane
Active control of large amplitude vibrations
123

Analogous to the representation of the state of strains
given by Eq. (5), the state of stress at any point in the
overall MEE shell can be written as follows:
rbf g ¼ rx ry rxy rz½ �T and
rsf g ¼ rxz ryz½ �Tð9Þ
in which rx; ry and rz are the normal stresses along x-,
y- and z-directions, respectively; rxy is thein-plane
shear stress; rxz and ryz are transverse shear stresses.
The coupled constitutive relations for the MEE
substrate are given by
rkb
� �¼ �C
kb
h iek
b
� �� ek
b
� �Ez � qk
b
� �Hz;
rks
� �¼ �C
ks
h iek
s
� �;
Dz ¼ ekb
� �Tek
b
� �þ 2k
33Ez þ d33Hz;
and Bz ¼ qkb
� �Tek
b
� �þ d33Ez þ l33Hz ; k ¼ 1; 2; 3;
ð10Þ
where, Dz, Bz, Ez and Hz are the electric displacement,
the magnetic induction, the electrical field and the
magnetic field, respectively, along the z-direction;
[ �Ckb] and [ �C
ks ] are the transformed elastic coefficient
matrix; 2k33 and l33 are the dielectric constant and the
magnetic permeability constant, respectively; {ekb},
{qkb} and d33 are the piezoelectric coefficient matrix,
the magnetostrictive coefficient matrix and the elec-
tromagnetic coefficient, respectively. The various
matrices appearing in Eq. (10) are given by
�Ckb
h i¼
�Ck11
�Ck12
�Ck13
�Ck16
�Ck12
�Ck22
�Ck23
�Ck26
�Ck13
�Ck32
�Ck33
�Ck36
�Ck16
�Ck26
�Ck36
�Ck66
2666664
3777775;
�Cks
h i¼
�Ck55
�Ck45
�Ck45
�Ck66
" #; ek
b
� �¼
e31
e32
e33
e36
8>>><>>>:
9>>>=>>>;;
qkb
� �¼
q31
q32
q33
q36
8>>><>>>:
9>>>=>>>;;
ð11Þ
The constitutive relations for the 1–3 PZC constrain-
ing layer of the ACLD treatment adaptable with the
present method of finite element formulation are given
by
rkb
� �¼ �C
kb
h iek
b
� �� �Cbs
� �ek
s
� �� �ebf gEz;
rks
� �¼ �Cbs
� �Tek
b
� �þ �C
ks
h iek
s
� �� �ebf gEz and
Dz ¼ �ebf gT ekb
� �þ �esf gT ek
s
� �þ �233Ez k ¼ 5ð Þ
ð12Þ
In Eq. (12), the forms of the transformed elastic
coefficient matrices [ �Ckb] and [ �C
ks ] are similar to those
given by Eq. (11). The constitutive relations for the
1–3 PZC reveal that the inclination of the piezoelectric
fibers in the vertical xz- or yz-plane is responsible for
the coupling between the transverse shear strains and
the inplane stresses. The corresponding coupling
elastic constant matrix [ �CNþ2
bs ] is given by
�CNþ2
bs
h i¼
�C15�C25
�C35 0
0 0 0 �C46
� T
or
�CNþ2
bs
h i¼ 0 0 �C56 0
�C14�C24 0 �C34
� Tð13Þ
according as the fibers are coplanar with the xz- or the
yz-plane, respectively. If the piezoelectric fibers are
coplanar with both the xz- and the yz-planes (k = 0),
the coupling matrix of Eq. (13) turns into a null matrix.
Also, the elements of the piezoelectric constant
vectors {ekb} and {ek
s } appearing in Eq. (12) are given
by
�ebf g ¼ �e31 �e32 �e33 �e36f gTand
�esf g ¼ �e35 �e34f gT ð14Þ
The present analysis of the overall MEE shells will be
carried out in the time domain. Consequently, the
Golla–Hughes–McTavish (GHM) method has been
implemented to model the viscoelastic material. For
time domain analysis, the constitutive equation for the
linear, isotropic and homogeneous viscoelastic mate-
rial is expressed in stieltjes integral form and is given
by (Mc Tavish and Hughes 1993).
rks
� �¼Z t
0
G t� sð Þo ek
s
� os
os; k ¼ 4; ð15Þ
where G(t) is the relaxation function of the viscoelas-
tic material. The principle of virtual work employed to
S. C. Kattimani, M. C. Ray
123

derive the governing equations of the overall system
can be written as
X3
k¼1
Z
Xk
d ekb
� �Trk
b
� �dXk þ
X4
k¼1
Z
Xk
d eks
� �Trk
s
� �dXk
þZ
X5
d e5b
� �Tr5
b
� �þ d e5
s
� �Tr5
s
� � �dX5
�ZXt
dEtzDt
zdXt �Z
Xb
dEbz Db
z dXb
�Z
Xm
dHzBzdXm �ZA
d dtf gT ff gdA
þX5
k¼1
Z
Xk
d dtf gTqk d::
t
� �dXt
¼ 0
ð16Þ
where, {f} = [0 0 p]T is the externally applied surface
traction vector acting over a surface area A with
p being the transverse pulse load, Xk (k = 1, 2,
3,…,5) indicates the volume of the relevant layer, qk is
the mass density of the kth layer and d is the symbol of
the first variation. According to the Maxwell’s equa-
tions, the transverse electric fields Etz and Eb
z and the
magnetic field Hz are related to the electric potentials
/t and /band the magnetic potential w in the
following forms:
Etz ¼ �
o/t
oz; Eb
z ¼ �o/b
ozand Hz ¼ �
owoz
ð17Þ
in which /t and /b are the electric potential functions
in the top and the bottom piezoelectric layer, respec-
tively. It is assumed that the interfaces between the
piezoelectric layer and the magnetostrictive layer are
suitably grounded. Also, since the thicknesses of the
layers of the substrate are very small, linear variations
of the electric potential and the magnetic potential
functions can be assumed across the thickness of the
layers. Thus the electric potential functions /t and /b
can be expressed as
/t ¼ z� zb
h/1 and /b ¼ � z� h2
h/2 ð18Þ
while the magnetic potential distribution field in the
magnetostrictive layer can be expressed as
w ¼ z� h2
h�w ð19Þ
where zb is the z-coordinate of the bottom surface of
the top piezoelectric layer of the substrate, h2 is the z-
coordinate of the top surface of the bottom piezoelec-
tric layer, /1 and /2 are electric potentials on the top
surface and the bottom surface of the top and the
bottom piezoelectric layers, respectively, �w is the
magnetic potential on the top surface of the magne-
tostrictive layer and h is the thickness of each layer of
the substrate. It may be noted that Eqs. (16)–(19)
should be augmented for the M/P/M shell by replacing
the top and the bottom piezoelectric layers with the
magnetostrictive layers, while the middle layer is
piezoelectric.
3 Finite element model of the magneto–electro–
elastic doubly curved shell integrated
with ACLD patches
The overall MEE shell integrated with the ACLD
patches is discretized by eight noded iso-parametric
quadrilateral elements. In accordance with Eq. (5), the
generalized displacement vectors {dti} and {dri}
associated with the ith (i = 1, 2, 3,…,8) node of the
element can be written as
dtif g ¼ u0i v0i w0i½ �T and
drif g ¼ hxi hyi hzi /xi /yi /zi cxi cyi
h iT
ð20Þ
The generalized displacement vectors, the electric
potential vector {/} and the magnetic potential �w at
any point within the element can be expressed in terms
of the nodal generalized displacement vectors ({det }
and {der}), the nodal electric potential vector {/e} and
the nodal magnetic potential vector { �we}, respec-
tively, as follows:
dtf g ¼ Nt½ � det
� �; drf g ¼ Nr½ � de
r
� �;
/f g ¼ /1 /2½ �T¼ N/� �
/ef g and �w ¼ Nw� �
�we� �ð21Þ
in which,
Active control of large amplitude vibrations
123

det
� �¼ de
t1
� �Tde
t2
� �T. . . de
t8
� �Th iT
;
der
� �¼ de
r1
� �Tde
r2
� �T. . . de
r8
� �Th iT
;
/ef g ¼ /11 /21 /12 /22 : : : /18 /28½ �T;�w
e� �¼ �w1
�w2 . . . �w8
� �T;
Nt½ � ¼ Nt1 Nt2 . . . Nt8½ �T;Nr½ � ¼ Nr1 Nr2 . . . Nr8½ �T;
N/� �
¼N/11 0 N/12 0 . . . N/18 0
0 N/21 0 N/22 . . . 0 N/28
� T
;
Nw� �
¼ Nw1 Nw2 . . . Nw8½ �T;Nti ¼ niIt; Nri ¼ niIr
ð22Þ
where [Nt], [Nr], [N/] and [Nw] are the (3 9 24),
(8 9 64), (2 9 16) and (1 9 8) shape function matri-
ces, respectively, It and Ir are the (3 9 3) and the
(8 9 8) identity matrices, respectively and ni is the
shape function of natural coordinates associated with
the ith node. Also, /1i, /2i(i = 1, 2, 3,…,8) are nodal
electric potential degrees of freedom and �wi (i = 1, 2,
3,…,8) are the magnetic potential degrees of freedom.
Using Eqs. (18)–(22), the transverse electric fields Etz,
Ebz and the transverse magnetic field Hz are given by
Etz ¼�
1
h1 0½ � N/
� �/ef g; Eb
z ¼�1
h0 1½ � N/
� �/ef g
and Hz ¼�1
hNw� �
�we� �
ð23Þ
Now, using Eqs. (6), (7) and (22), the generalized
strain vectors at any point within the element can be
expressed in terms of the nodal generalized displace-
ment vectors as follows:
ebtf g ¼ Btb½ � det
� �; ebrf g ¼ Brb½ � de
r
� �etbnf g
¼ 1
2B1½ � B2½ � de
t
� �;
estf g ¼ Bts½ � det
� �and ersf g ¼ Brs½ � de
r
� �ð24Þ
in which the nodal strain–displacement matrices [Btb],
[Brb], [Bts], [Brs], [B1] and [B2] are given by
Btb½ � ¼ Btb1 Btb2 . . . Btb8½ �;Brb½ � ¼ Brb1 Brb2 . . . Brb8½ �;Bts½ � ¼ Bts1 Bts2 . . . Btb8½ �;Brs½ � ¼ Brs1 Brs2 . . . Brs8½ �;
B1½ � ¼dw0
dx 0 dw0
dy 0
0 dw0
dydw0
dx 0
" #T
;
B2½ � ¼ B21 B22 . . . B28½ �
ð25Þ
The various submatrices [Btbi], [Brbi], [Btsi] and [Brsi]
(i = 1, 2, 3,…,8) appearing in Eq. (25) have been
explicitly presented in the Appendix 1. Now, on
substitution of Eqs. (6), (7), (12), (23) and (24) into
Eq. (16), the following open loop elemental equations
of motion for the MEE shell integrated with the ACLD
treatment are obtained as follows:
Me½ � €de
t
n oþ Ke
tt
� �de
t
� �þ Ke
tr
� �de
r
� �
þ Ketsv
� � Z t
0
Gðt� sÞ o
osde
t
� �ds
þ Ketrsv
� � Z t
0
Gðt� sÞ o
osde
r
� �dsþ Ke
t/
h i/ef g
þ Ketw
h iwef g ¼ Fe
t
� �� Fe
tp
n oV� Fe
tpn
n oV
ð26Þ
Ketr
� �Tde
t
� �þ Ke
rr
� �de
r
� �
þ Ketrsv
� � Z t
0
Gðt�sÞ o
osde
t
� �ds
þ Kerrsv
� � Z t
0
Gðt�sÞ o
osde
r
� �dsþ Ke
r/
h i/ef g
þ Kerw
h iwef g
¼ � Ferp
n oV
ð27Þ
Ke/t
h ide
t
� �þ Ke
r/
h iT
der
� �� Ke
//
h i/ef g ¼ 0 ð28Þ
Kewt
h ide
t
� �þ Ke
rw
h iT
der
� �� Ke
ww
h iwef g ¼ 0
ð29Þ
The various matrices and vectors appearing in Eqs.
(26)–(29) are the elemental mass matrix [Me], the
elemental elastic stiffness matrices Kett
� �; Ke
tr
� �;
�Ke
rr
� �; Ke
tsv
� �; Ke
trsv
� �and Ke
rrsv
� �Þ, the elemental
electro-elastic coupling stiffness matrices ([Ket/] and
[Ker/]), the elemental magneto–elastic coupling stiff-
ness matrices ([Ketw] and [Ke
rw]), the elemental elec-
trical stiffness matrix [Ke//], the elemental magnetic
stiffness matrix [Keww], the elemental electro-elastic
coupling load vectors ({Fetp} and {Fe
rp}) and the
elemental mechanical load vector {Fet }. Also,
S. C. Kattimani, M. C. Ray
123

V represents the applied voltage across the thickness
of the 1–3 PZC layer. The elemental matrices and
vectors are given by
Kett
� �¼ Ke
tb
� �þ Ke
ts
� �þ Ke
tbp
h iþ Ke
tsp
h i
þ Ketbn
� �þ Ke
tbpn
h i;
Ketr
� �¼ Ke
trb
� �þ Ke
trbn
� �þ Ke
trs
� �þ Ke
trbp
h i
þ Ketrbpn
h iþ Ke
trsp
h i;
Kert
� �¼ Ke
trb
� �Tþ 1
2Ke
trbn
� �Tþ Ketrs
� �Tþ Kertbp
h i
þ Kertbpn
h iþ Ke
trsp
h iT
;
Kerr
� �¼ Ke
rrb
� �þ Ke
rrs
� �þ Ke
rrbp
h iþ Ke
rrsp
h i;
Ket/
h i¼ Ke
t/l
h iþ Ke
t/n
h i
Ketw
h i¼ Ke
twl
h iþ Ke
twn
h i;
Ke/t
h i¼ Ke
t/l
h iT
þ 1
2Ke
t/n
h iT
;
Kewt
h i¼ Ke
twl
h iT
þ 1
2Ke
twn
h iT
Fetp
n o¼ Fe
tpb
n oþ Fe
tps
n o;
Ferp
n o¼ Fe
rpb
n oþ Fe
rps
n o;
Fetpn
n o¼Zbe
0
Zae
0
B2½ �T B1½ �T Ftbp
� �dxdy;
Me½ � ¼Zbe
0
Zae
0
�m Nt½ �T Nt½ � dxdy and
�m ¼XNþ5
k¼1
Zhkþ1
hk
qkdz
Fef g ¼Zbe
0
Zae
0
Nt½ �T ff g dxdy;
ð30Þ
The elemental stiffness matrices appearing in Eq. (30)
corresponding to the bending stretching deformations
are
Ket/l
h i¼Zae
0
Zbe
0
Btb½ �T Dt/� �
N/� �
dxdy;
Ker/
h i¼Zae
0
Zbe
0
Brb½ �T Dr/� �
N/� �
dxdy;
Ket/n
h i¼Zae
0
Zbe
0
B2½ �T B1½ �T Dt/� �
N/� �
dxdy;
Ketwl
h i¼Zae
0
Zbe
0
Btb½ �T Dtw� �
Nw� �
dxdy
Kerw
h i¼Zae
0
Zbe
0
Brb½ �T Dtw� �
Nw� �
dxdy;
Ketwn
h i¼Zae
0
Zbe
0
B2½ �T B1½ �T Dtw� �
Nw� �
dxdy;
Ke//
h i¼Zae
0
Zbe
0
N/� �T
D//� �
N/� �
dxdy;
Keww
h i¼Zae
0
Zbe
0
Nw� �T
Dww� �
Nw� �
dxdy;
Ketb
� �¼Zae
0
Zbe
0
Btb½ �T Dtb½ � Btb½ � dxdy;
Ketrb
� �¼Zae
0
Zbe
0
Btb½ �T Dtrb½ � Brb½ � dxdy;
Ketbn
� �¼Zbe
0
Zae
0
1
2Btb½ �T Dtb½ � B1½ � B2½ �
�
þ B2½ �T B1½ �T Dtb½ � Btb½ �
þ 1
2B2½ �T B1½ �T Dtb½ � B1½ � B2½ �
�dxdy;
Ketbp
h i¼Zae
0
Zbe
0
Btb½ �T Dptb
� �Btb½ �
þ2 Btb½ �T Dptbs
� �Bts½ ��
dxdy; ð31Þ
Active control of large amplitude vibrations
123

Ketrbp
h i¼Zae
0
Zbe
0
Btb½ �T Dptrb
� �Brb½ �
þ Btb½ �T Dptrbs
� �Brs½ �
þ Bts½ �T Dprtbs
� �TBrb½ �
�dxdy;
Kerrbp
h i¼Zae
0
Zbe
0
Brb½ �T Dprrb
� �Brb½ �
þ2 Brb½ �T Dprrbs
� �Brs½ �
�dxdy;
Fetpb
n o¼Zae
0
Zbe
0
Btb½ �T Dbtp
n odxdy;
Ferpb
n o¼Zae
0
Zbe
0
Brb½ �T Dbrp
n odxdy:
ð31Þ
and those associated with the transverse shear defor-
mations are
Kets
� �¼Zae
0
Zbe
0
Bts½ �T Dts½ � Bts½ � dxdy;
Ketrs
� �¼Zbe
0
Zae
0
Bts½ �T Dtrs½ � Brs½ � dxdy;
Kerrs
� �¼Zbe
0
Zae
0
Brs½ �T Drrs½ � Brs½ � dxdy;
Ketsp
h i¼Zae
0
Zbe
0
Bts½ �T Dpts½ � Bts½ � dxdy;
Ketrsp
h i¼Zae
0
Zbe
0
Bts½ �T Dptrs½ � Brs½ � dady;
Kerrsp
h i¼Zae
0
Zbe
0
Brs½ �T Dprrs
� �Brs½ � dxdy;
Ketsv
� �¼ hv
Zbe
0
Zae
0
Bts½ �T Bts½ � dxdy;
Ketrsv
� �¼Zbe
0
Zae
0
Bts½ �T Dtrsv½ � Brs½ � dxdy;
Kerrsv
� �¼Zbe
0
Zae
0
Brs½ �T Drrsv½ � Brs½ � dxdy
ð32Þ
The various rigidity matrices and rigidity vectors
involved in the elemental matrices of Eqs. (30)–(32)
are explicitly presented in Appendix 2. It may be noted
that in case of an element without integrated with the
ACLD treatment, the vectors {Fetp} and {Fe
rp} of Eqs.
(26) and (27) turns out to be the null vectors. The
elemental equations of motion are assembled in the
straight forward manner into the global space to obtain
the open-loop coupled global equations of motion of
the overall smart MEE shell integrated with the
patches of the ACLD treatment as follows:
M½ � X::n oþ Ktt½ � Xf g þ Ktr½ � Xrf g þ Kt/
� �Uf g
þ Ktw� �
wf g þ Ktsv½ �Z t
0
Gðt� sÞ o
osXf gds
þ Ktrsv½ �Z t
0
Gðt� sÞ o
osXrf gds
¼ Ff g �Xq
j¼1
Fjtp
n oþ Fj
tpn
n o �Vj
ð33Þ
Ktr½ �T Xf g þ Krr½ � Xrf g
þ Ktrsv½ �TZ t
0
Gðt� sÞ o
osXf gds
þ Krrsv½ �Z t
0
Gðt� sÞ o
osXrf gdsþ Kr/
� �Uf g
þ Krw� �
wf g
¼ �Xq
j¼1
Fjrp
n oVj
ð34Þ
Kt/� �T
Xf g þ Kr/� �T
Xrf g � K//� �
Uf g ¼ 0 ð35Þ
Ktw� �T
Xf g þ Krw� �T
Xrf g � Kww� �
wf g ¼ 0 ð36Þ
where [M] is the global mass matrix; [Ktt], [Ktr],
[Krr], [Ktsv], [Ktrsv] and [Krrsv] are the global elastic
stiffness matrices, [Kt/] and [Kr/] are the global
electro-elastic coupling stiffness matrices, [Ktw] and
[Krw] are the global magneto–elastic coupling stiff-
ness matrices, [K//] is the global electrical stiffness
matrix, [Kww] is the global magnetic stiffness matrix,
{Ftp} and {Frp} are the global electro-elastic coupling
vectors; {F} is the global nodal mechanical load
S. C. Kattimani, M. C. Ray
123

vector, respectively, {X} and {Xr} are the global
generalized nodal displacement vectors, {A} and {w}
are the global nodal generalized electrical potential
and magnetic potential vectors, Vj is the applied
control voltage to the jth ACLD patch and q is the
number of patches. In the absence of the applied
control voltage, the coupled global equations derived
above also govern the passive (uncontrolled) con-
strained layer damping of the MEE shell. After
invoking the boundary conditions, the global electric
and magnetic potential vectors {A} and {w} are
condensed and subsequently taking the Laplace
transform of resulting equations, the following global
equations in the Laplace domain are obtained:
s2 M½ � ~Xt
� �þ L K1½ � Xtf g þ K2½ � Xrf gð Þ
þ Ktsv½ �s ~GðsÞ ~Xt
� �þ Ktrsv½ �s ~GðsÞ ~Xr
� �
¼ ~F� ��Xq
j¼1
Fjtp
n o~V
j � LXq
j¼1
Fjtpn
n oVj
!
ð37Þ
L K3½ � Xtf gð Þ þ K4½ � ~Xr
� �þ Ktrsv½ �Ts ~GðsÞ ~Xt
� �þ Krrsv½ �s ~GðsÞ ~Xr
� �¼ �
Xq
j¼1
Fjrp
n o~V
j
ð38Þ
in which, the augmented matrices are given by
K1½ � ¼ Ktt½ � þ Kt/� �
K//� ��1
Kt/� �T
þ Ktw� �
Kww� ��1
Ktw� �T
;
K2½ � ¼ Ktr½ � þ Kt/� �
K//� ��1
Kr/� �T
þ Krw� �
Kww� ��1
Krw� �T
;
K3½ � ¼ Krt½ � þ Kr/� �
K//� ��1
K/t
� �Tþ Krw� �
Kww� ��1
Kwt
� �Tand
K4½ � ¼ Krr½ � þ Kr/� �
K//� ��1
Kr/� �T
þ Krw� �
Kww� ��1
Krw� �T
ð39Þ
where, L is the Laplace operator while { ~Xt}, { ~Xr},
{ ~F} and ~Vj
are Laplace transforms of {Xt}, {Xr}, {F}
and Vj, respectively. The term s ~GðsÞ is referred to as
the material modulus function of the viscoelastic
material in the Laplace domain. Making use of the
GHM model for the viscoelastic material in the time
domain, the material modulus function can be
expressed by a series of mini-oscillator terms (Mc
Tavish and Hughes 1993) as follows:
s ~GðsÞ ¼ G1 1þXN
k¼1
aks2 þ 2nkxks
s2 þ 2nkxksþ x2k
" #ð40Þ
in which, G1 is the equilibrium value of the modulus
i.e. the final value of the relaxation G(t). Every mini-
oscillator term is a second-order rational function
consisting of three positive constants ak, xk and nk.
These constants influence the shape of the modulus
function in the complex s-domain. Taking into con-
sideration of a GHM material modulus function with a
single mini-oscillator term (Mc Tavish and Hughes
1993) i.e.,
s ~GðsÞ ¼ G1 1þ as2 þ 2nxs
s2 þ 2nxsþ x2
" #ð41Þ
the auxiliary dissipation coordinates Z and Zr
are introduced as follows (Mc Tavish and Hughes
1993):
s ~GðsÞ ~Xt
� �¼ G1 1þ að Þ ~Xt
� �� a ~Z sð Þ
� �and
s ~GðsÞ ~Xr
� �¼ G1 1þ að Þ ~Xr
� �� a ~Zr sð Þ
� �ð42Þ
~ZðsÞ ¼ x2
s2 þ 2nxsþ x2Xtf g and
~ZrðsÞ ¼x2
s2 þ 2nxsþ x2Xrf g;
ð43Þ
where, ~ZðsÞ and ~ZrðsÞ are the Laplace transforms of
Z and Zr, respectively. Using Eqs. (41) and (42) in
Eqs. (37) and (38), it can be written that
s2 M½ � ~Xt
� �þ L K1½ � Xtf g þ K2½ � Xrf gð Þ
þG1 Ktsv½ � ð1þ aÞ ~Xt
� �� a~zðsÞ
� �þG1 Ktrsv½ � ð1þ aÞ ~Xr
� �� a~zrðsÞ
� �
¼ ~F� ��Xq
j¼1
Fjtp
n o~V
j � LXq
j¼1
Fjtpn
n oVj
!
ð44Þ
L K3½ � Xtf gð Þ þ K4½ � ~Xr
� �þ Ktrsv½ �Ts ~GðsÞ ~Xt
� �
þ Krrsv½ �s ~GðsÞ ~Xr
� �¼ �
Xq
j¼1
Fjrp
n o~V
j
ð45Þ
Active control of large amplitude vibrations
123

Taking inverse Laplace transforms of Eqs. (43)–(45)
and condensing the global degrees of freedom {Xr}
from the resulting equations in the time domain, the
following equations are obtained:
M½ � Xt
::n oþ Kx½ � Xtf g þ Kz½ � ZðtÞf g þ Kzr½ � Zrf g
¼ Ff g �Xq
j¼1
Fjp
n oVj
ð46Þ
Z::n oþ 2nx _Z
� �þ x2 Zf g � x2 Xtf g ¼ 0 ð47Þ
Zr
::n oþ 2nx _Zr
� �þ x2 K5½ � Xtf g � x2 K6½ � Zf g
� x2 K7½ � Zrf g ¼ �Xq
j¼1
Fjpz
n oVj
ð48Þ
in which,
Kx½ � ¼ �Ktt½ � � �Ktr½ � �Krr½ ��1Ktr½ �T;
Kz½ � ¼ aG1 �Ktr½ � �Krr½ ��1Ktrsv½ �T�aG1 Ktsv½ �;
Kzr½ � ¼ aG1 �Ktr½ � �Krr½ ��1Krrsv½ � � aG1 Ktrsv½ �;
Fjp
n o¼ � �Ktr½ � �Krr½ ��1
Fjrp
n oþ Fj
tp
n oþ Fj
tpn
n o;
�Ktt½ � ¼ K1½ � þG1 1þ að Þ Ktsv½ �;�Ktr½ � ¼ K2½ � þG1 1þ að Þ Ktrsv½ �T;�Krt½ � ¼ K3½ � þG1 1þ að Þ Krrsv½ �T;�Krr½ � ¼ K4½ � þG1 1þ að Þ Krrsv½ �;K5½ � ¼ �Krr½ ��1 �Ktr½ �T
K6½ � ¼ aG1 �Krr½ ��1Ktrsv½ �T;
K7½ � ¼ Izr � aG1 �Krr½ ��1Krrsv½ �;
Fjpz
n o¼ x2 �Krr½ ��1
Fjrp
n o
ð49Þ
Now, Eqs. (46)–(48) are combined ***to obtain the
global open-loop equations of motion in the time
domain as follows:
M�½ � X::n oþ C�½ � _X
� �þ K�½ � Xf g
¼ F�f g þXq
j¼1
�Fjp
n oVj; ð50Þ
where,
M�½ � ¼M½ � 0 0
0 IZ 0
0 0 IZr
264
375; C�½ � ¼
0 0 0
0 2nx 0
0 0 2nx
264
375;
K�½ � ¼Kx½ � Kz½ � Kzr½ ��x2 x2 0
x2 K5½ � �x2 K6½ � x2 K7½ �
264
375
F�f g ¼Ff g0
0
8><>:
9>=>;; �F
jp
n o¼
Fjp
n o0
Fjpz
n o
8>><>>:
9>>=>>;;
Xf g ¼Xtf gZ
Zr
8><>:
9>=>;
ð51Þ
4 Closed loop model
The control voltage Vj for activating the constraining
layer of each ACLD patch is supplied according to a
simple velocity feedback control law. Thus, the
control voltage for each patch can be represented in
terms of the derivatives of the global nodal degrees of
freedom as follows:
Vj ¼ �Kd _w0ðxj; yjÞ ¼ �Kd Ujt
h i_X
� �ð52Þ
where Kd is the control gain for the jth ACLD patch
and [Ujt] is the unit vector for expressing the transverse
velocity of a point (xj, yj) in terms of the time
derivative of the global nodal generalized translational
displacements. Substituting Eq. (52) into Eq. (50), the
final global equations of motion governing the closed
loop dynamics of the MEE shell integrated with the
ACLD system can be obtained as follows:
M�½ � X::n oþ C�d� �
_X� �
þ K�½ � Xf g ¼ F�f g ð53Þ
in which, [C�d] is the active damping matrix and is
given by
C�d� �
¼ C�½ � þXq
j¼1
Kd�F
jp
n oUj
t
h i
5 Results and discussions
In order to investigate the performance of the ACLD
treatment for controlling the geometrically nonlinear
vibrations of the MEE doubly curved shells, numerical
S. C. Kattimani, M. C. Ray
123

results are evaluated using the three dimensional finite
element model derived in the preceding section. The
MEE shell considered for computing the numerical
results is integrated either with a single ACLD patch as
illustrated in Fig. 1(a) or two identical patches placed
on the opposite edges of the shell as shown in
Fig. 1(b). The length and the width of the single
ACLD patch is a/2 and b/2 while that of the patches
placed on the edges are a/2 and b/4, respectively. The
total volume of the two patches is equal to that of the
single patch placed at the center. The material of the
constraining layer of the ACLD treatment is PZT-5H/
spur epoxy composite with 60 % piezoelectric fiber
volume fraction. The elastic and the piezoelectric
properties of this constraining 1–3 PZC layer are as
follows (Ray and Pradhan 2006):
CP11 ¼ 9:29GPa; CP
12 ¼ 6:18GPa;
CP13 ¼ 6:05GPa; CP
33 ¼ 35:44GPa; CP23 ¼CP
13;
CP44 ¼ 1:58GPa; CP
55 ¼ 1:54GPa;
CP55 ¼CP
44; e31 ¼�0:1902C=m2;e33 ¼ 18:4107C=m2
The thicknesses of the constraining 1–3 PZC layer and
the viscoelastic layer are considered to be 250 and
200 lm, respectively. Unless otherwise stated, the
aspect ratio (a/H) of the MEE shell is considered to be
200 and the controlled responses are computed using
the vertically reinforced 1–3 PZC (i.e. k = 0�). The
substrate shell is modeled by three layers of equal
thickness (h = 0.001 m) with commonly used stack-
ing sequences (i.e., P/M/P and M/P/M). The material
properties of the layers of the MEE shells are listed in
Table 1. The density of both the constituent materials
(BaTiO3 and CoFe2O4) of the MEE substrate is
1600 kg/m3. In order to consider single term GHM
expression, the values of a, n and x are used as 11.42,
20 and 1.0261 9 105, respectively (Young-Hun et al.
2002). The shear modulus ðG1Þ and the density of the
viscoelastic material are used as 1.822 9 106 Pa and
1140 kg/m3, respectively (Young-Hun et al. 2002).
The simply supported boundary conditions employed
in the present analysis are given by
v0 ¼ w0 ¼ hy ¼ /y ¼ cy ¼ hz ¼ /z ¼ 0;
at x ¼ 0; a and
u0 ¼ w0 ¼ hx ¼ /x ¼ cx ¼ hz ¼ /z ¼ 0; ;
at y ¼ 0; b
ð54Þ
Ta
ble
1M
ater
ial
pro
per
ties
of
Ba
TiO
3an
dC
oF
e 2O
4(P
an2
00
1)
C11
=C
22
(10
9N
/m2)
C12
(10
9N
/m2)
C13
=C
23
(10
9N
/m2)
C33
(10
9N
/m2)
C44
=C
55
(10
9N
/m2)
C66
(10
9N
/m2)
q(k
g/m
3)
BaT
iO3
16
67
77
81
62
43
44
.55
,800
Co
Fe 2
O4
28
61
73
17
0.5
26
9.5
45
.35
6.5
5,3
00
BaT
iO3
e 31
=e 3
2(C
/m2)
-4
.4
e 33
(C/m
2)
18
.6
e 24
=e 1
5(C
/m2)
11
.6
[ 11
=[ 2
2(1
0-
9C
2/N
m2)
11
.2
[ 33
(10
-9
C2/N
m2)
12
.6
l 11
=l 2
2(1
0-
6N
s2/C
2)
5
l 33
(10
-6
Ns2
/C2)
10
Co
Fe 2
O4
q31
=q
32
(N/A
m)
18
0.3
q33
(N/A
m)
69
9.7
q24
=q
15
(N/A
m)
55
0
[ 11
=[ 2
2(1
0-
9C
2/N
m2)
0.0
8
[ 33
(10
-9
C2/N
m2)
0.0
93
l 11
=l 2
2(1
0-
6N
s2/C
2)
-5
90
l 33
(10
-6
Ns2
/C2)
15
7
Active control of large amplitude vibrations
123

In all cases the electric and the magnetic potentials at
the boundaries are assumed to be zero. The imple-
mentation of the GHM method for modeling the
ACLD treatment in case of MEE shell is validated
following the methodology prescribed by Lim et al.
(2002). Accordingly, the GHM method and the
conventional complex modulus approach have been
implemented independently for modeling the visco-
elastic material in computing the linear frequency
responses for the transverse displacement of the
doubly curved MEE shells. First few modes of the
shells are excited by applying a time harmonic load of
amplitude 1 N. The frequency response functions
obtained by the GHM method as well as by the
standard complex modulus approach for the simply
supported MEE shell with P/M/P and M/P/M stack-
ing sequences have been demonstrated in Figs. 3 and
4, respectively. It may be observed from these figures
that the frequency response curves obtained by both
the approaches are almost overlapped. Therefore, it
may be considered that the present approach of
modeling the viscoelastic material by the GHM
method accurately estimates the damping characteris-
tics of the overall MEE doubly curved shells. The
finite element model derived here can also be used for
studying the laminated composite plates by replacing
the layers of the MEE shell with the conventional
composite layers. Hence, in order to verify the validity
of the present finite element model, the load deflection
curve for laminated composite shell with infinite radii
of curvature (R1 = 1, R2 = R1) integrated with the
inactivated ACLD patches of negligible thickness are
computed by the present model and subsequently,
compared with the identical laminated composite
plates studied by Sarangi and Ray (Sarangi and Ray
2011). Figure 5 illustrates this comparison for the
simply supported laminated composite plates. It may
be observed that the results are in excellent agreement.
0 100 200 300 400 500 600 700 800 900 100010
-6
10-4
10-2
100
102
Frequency (Hz)
w/H
Complex modulus approachGHM Approach
Fig. 3 Linear frequency
responses for the center
deflection of a simply
supported (SS) P/M/P-MEE
doubly curved shell
obtained by the GHM
method and the complex
modulus approach
(a = 200H, R1/a = 10, R2/
R1 = 10)
0 100 200 300 400 500 600 700 800 900 1000
10-4
10-2
100
102
Frequency (Hz)
w/H
Complex modulus approachGHM Approach
Fig. 4 Linear frequency
responses for the center
deflection of a simply
supported (SS) M/P/M-MEE doubly curved shell
obtained by the GHM
method and the complex
modulus approach
(a = 200H, R1/a = 10, R2/
R1 = 10)
S. C. Kattimani, M. C. Ray
123

It is worth mentioning that to the authors’ best
knowledge no solution has been reported in the
literature concerned with the active control of geo-
metrically nonlinear vibrations of the MEE doubly
curved shells. Thus, in order to validate further, the
results of the doubly curved shell with infinite radii of
curvature (R1 = 1, R2 = R1) are considered for the
comparison with the results of the MEE square plate
available in the literature (Sladek et al. 2013). The
variation of non dimensional vertical displacement w/
H at the center of the shell with respect to non-
dimensional load parameter q0 = qa4/C11H4 for the
MEE shell integrated with the inactivated ACLD
patches of negligible thickness are first computed and
subsequently compared with the results of identical
square plate reported by Sladek et al. (2013).
Figures 6(a) and (b) illustrate this comparison for the
simply supported and clamped–clamped P/M/P-MEE
shell respectively. In addition, linear solution is also
plotted to demonstrate the nonlinear stiffening effect
in the shell. It is evident from this figure that the results
are in excellent agreement. The backbone curves
illustrating the variation of the frequency ratio (xnl/xl)
with the non-dimensional transverse deflection (wmax/
H) to determine the magnitude of the exiting pulse
load which is responsible for causing geometrically
nonlinear deflections are plotted in Fig. 7. It may be
noticed from this figure that the paraboloid MEE shells
with R2/R1 = 10 and R1/a = 10 exhibit hardening
type nonlinearity. It is also noticed from this figure that
for causing geometrically nonlinear vibrations, the
magnitude of the exciting pulse load should be such
that the value of wmax/H be greater than 1. Hence, for
the purpose of computing the nonlinear transient
responses, the value of applied pulsed load is
arbitrarily considered as 3.2 and 3.8 kPa for P/M/P
and M/P/M sequences, respectively, such that the
amplitude ratio is more than 1 and substantial
nonlinearity is present in the uncontrolled responses.
The effect of curvature ratio (R1/a) on the response of
nonlinear frequency ratio (xnl/xl) of spherical (R2/
R1 = 1) MEE shell has been investigated in Fig. 8(a).
It is observed that the increase in the value of R1/a
increases the hardening type non linearity. Figure 8(b)
illustrates that the effect of curvature aspect ratio
(R2/R1) on the frequency ratio (xnl/xl). It is evident
from this figure that as the amplitude ratio increases,
the geometric nonlinearity in the hyperboloid shell
changes from softening type to hardening type. In
addition, the influence of the aspect ratio (a/H) on the
fundamental nonlinear frequency ratio (xnl/xl) for
paraboloid and hyperboloid shells have been tabulated
in Table 2. It may be observed from this table that the
frequency ratio increases with the increase in the
aspect ratio in case of paraboloid shells while this
trend is reverse in case of hyperboloid shells with both
P/M/P and M/P/M sequences. It may also be noted
that the frequency ratio increases with the increase in
the non-dimensional transverse deflection (wmax/H)
for both paraboloid and hyperboloid shells. The
control voltages supplied to the ACLD patches are
negatively proportional to the velocity of the point (a/
2, b/2, H/2) on the top of the substrate. The arbitrary
values of control gain are chosen for the admissible
control of nonlinear vibrations of the MEE shells
while maintaining the acceptable control voltage.
Figures 9 and 10 illustrate the nonlinear transient
responses of a simply supported MEE shells with P/
0 200 400 600 800 10000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Load (N/m2)
w/H
Nonlinear (Present)Sarangi and Ray (2011)Linear (Present)Sarangi and Ray (2011)
Fig. 5 Comparison of load
deflection curve of simply
supported MEE doubly
curved shell (with
composite properties and
R1 ? ?, R2 = R1) with
that of identical laminated
composite square plate
Active control of large amplitude vibrations
123

M/P and M/P/M stacking sequences, respectively,
integrated with a patch at the center or with the two
patches at the edges of the shell undergoing ACLD.
The transient responses presented in these figures are
corresponding to the cases when the patches are
passive (Kd = 0) and active (Kd = 0). In both the
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5(a)
(b)
qa4/C11
H4
w/H
Sladek et al. (2013)Present shell ( R
1= , R
2= R
1)
Linear ( R1= , R
2= R
1)
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
qa4 / C11
H4
w/H
Sladek et al. (2013)Present shell ( R
1= , R
2= R
1)
Linear ( R1= , R
2= R
1)
Fig. 6 a Variation of the
central deflection of the
simply supported P/M/P-
MEE doubly curved shell
(with R1 ? ?, R2 = R1)
with the transverse load.
b Variation of the central
deflection of the clamped–
clamped P/M/P-MEE
doubly curved shell (with
R1 ? ?, R2 = R1) with the
transverse load
1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4 1.450
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Frequency Ratio (nl
/l)
wm
ax /H
P/M/P-SSM/P/M-SSP/M/P-CCM/P/M-CC
Fig. 7 Backbone curves for
the simply supported (SS)
and clamped–clamped (CC)
MEE doubly curved shells
with P/M/P and M/P/Msequences (R1/a = 10, R2/
R1 = 10)
S. C. Kattimani, M. C. Ray
123

cases, the shells are set into undergoing nonlinear
vibrations with same maximum amplitude of uncon-
trolled response (Kd = 0) while the magnitudes of the
maximum control voltages are same. Figures 11 and
12 illustrate the corresponding control voltages
required for the active control of responses shown in
Fig. 9 and 10, respectively. It is observed from these
figures that the active ACLD treatment appreciably
improves the damping characteristics and has consid-
erable effect on the suppression of geometrically
nonlinear vibrations of the overall shells over the
passive damping with nominal control voltage. Also, it
may be observed from these figures that the perfor-
mance of the single ACLD patch placed at the center
of the top surface of the shell for attenuating the
nonlinear transient vibrations is considerably better
than that of the patches located at the edges.
Figures 13 and 14 illustrate the comparison of
controlled nonlinear transient responses of simply sup-
ported paraboloid shells (R2/R1 = 10) and hyperboloid
0.95 1 1.05 1.1 1.15 1.2 1.25 1.30
0.5
1
1.5
2
Frequency ratio(nl
/l)
wm
ax/H
1 1.1 1.2 1.3 1.40
0.5
1
1.5
2
Frequency ratio(nl
/l)
wm
ax/H
R1/a = 10, R
2/R
1 = -0.75
R1/a = 10, R
2/R
1 = -1
R1/a = 10, R
2/R
1 = 0.5
R1/a = 10, R
2/R
1 = 1
R1/a = 2, R
2 = R
1
R1/a = 5, R
2 = R
1
R1/a = 10, R
2 = R
1
R1/a = 20, R
2 = R
1
(a) (b)
Fig. 8 Influence of curvature ratio and curvature aspect ratio on the nonlinear frequency ratio (xnl/xl) for the simply supported P/M/P-MEE doubly curved shells (a = 200H)
Table 2 Effect of aspect ratio (a/H) of the MEE doubly curved paraboloid shell (R1/R2 = 1) and hyperboloid shell (R1/R2 = -1) on
the frequency ratio (xnl/xl) of the shells
Layer Sequence Aspect ratio (a/H) Doubly curved shell Amplitude ratio (wmax/H)
0.4 0.8 1.2 1.6
P/M/P 20 R1 = R2 1.0457 1.1250 1.2277 1.3445
R1 = -R2 1.0216 1.0823 1.1726 1.2822
50 R1 = R2 1.0646 1.1534 1.2605 1.3805
R1 = -R2 1.0195 1.0756 1.1621 1.2718
100 R1 = R2 1.0688 1.1513 1.2446 1.3462
R1 = -R2 1.0178 1.0693 1.1498 1.2534
M/P/M 20 R1 = R2 1.0415 1.1137 1.2076 1.3149
R1 = -R2 1.0194 1.0741 1.1561 1.2562
50 R1 = R2 1.0600 1.1423 1.2417 1.3535
R1 = -R2 1.0175 1.0679 1.1462 1.2461
100 R1 = R2 1.0657 1.1441 1.2326 1.3290
R1 = -R2 1.0159 1.0620 1.1345 1.2286
Active control of large amplitude vibrations
123

shells (R2/R1 = -10) with P/M/P and M/P/M
sequences, respectively, using the single ACLD patch
located at the center of the shell. It is evident from
these figures that the paraboloid shell possesses better
damping characteristics with both P/M/P and M/P/M
configurations than the hyperboloid MEE shell. Fig-
ure 15 illustrates the control voltages necessary for the
active control of responses for P/M/P paraboloid and
0 0.05 0.1 0.15 0.2 0.25 0.30
0.2
0.4
0.6
0.8
1
1.2
Time (sec)
w/H
Uncontrolled (Kd = 0)
Center patch (Kd = 200)
Edge patches (Kd = 200)
Fig. 9 Nonlinear transient
responses of a simply
supported P/M/P-MEE
doubly curved shell
undergoing ACLD for
different locations of the
ACLD patches (R1/a = 10,
R2/R1 = 10)
0 0.05 0.1 0.15 0.2 0.25 0.30
0.2
0.4
0.6
0.8
1
1.2
Time (sec)
w/H
Uncontrolled (Kd = 0)
Center patch (Kd = 150)
Edge patches (Kd = 150)
Fig. 10 Nonlinear transient
responses of a simply
supported M/P/M-MEE
doubly curved shell
undergoing ACLD for
different locations of the
ACLD patches (R1/a = 10,
R2/R1 = 10)
0 0.05 0.1 0.15 0.2 0.25 0.3
-300
-200
-100
0
100
200
300
Time (sec)
Con
trol
vol
tage
(V
olt)
Center patch (Kd = 200)
Edge patches (Kd = 200)
Fig. 11 Comparison of
control voltages required for
the ACLD of nonlinear
transient vibrations of the
simply supported P/M/P-MEE doubly curved shell
for the different locations of
the patches (R1/a = 10, R2/
R1 = 10)
S. C. Kattimani, M. C. Ray
123

hyperboloid shells. Consequently, further investiga-
tion is carried out for the paraboloid MEE shell
integrated with the single ACLD patch at the center of
the top surface of the MEE doubly curved shell only.
Figures 16 and 17 illustrate the transient responses for
the clamped–clamped MEE shells with P/M/P and M/
P/M stacking sequences, respectively using the single
patch at the center of the top surface of the shells. In
0 0.05 0.1 0.15 0.2 0.25 0.3
-200
-100
0
100
200
275
Time (sec)
Con
trol
vol
tage
(V
olt)
Center patch (Kd = 150)
Edge patches (Kd = 150)
Fig. 12 Comparison of
control voltages required for
the ACLD of nonlinear
transient vibrations of the
simply supported M/P/M-MEE doubly curved shell
for the different locations of
the patches (R1/a = 10, R2/
R1 = 10)
0 0.05 0.1 0.15 0.2 0.25 0.30
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (sec)
w/H
Paraboloid (R2= 10R
1)
Hyperboloid (R2= -10R
1)
Fig. 13 Nonlinear transient
responses of a simply
supported P/M/P-MEE
doubly curved shell
undergoing ACLD (R1/
a = 10, Kd = 200)
0 0.05 0.1 0.15 0.2 0.25 0.30
0.2
0.4
0.6
0.8
1
1.2
1.4
Time (sec)
w/H
Paraboloid (R2= 10R
1)
Hyperboloid (R2= -10R
1)
Fig. 14 Nonlinear transient
responses of a simply
supported M/P/M-MEE
doubly curved shell
undergoing ACLD (R1/
a = 10, Kd = 150)
Active control of large amplitude vibrations
123

these cases also, the ACLD patch effectively attenu-
ates the nonlinear vibrations of the shells and enhances
the damping characteristics of the shells with a
nominal control voltage shown in Fig. 18. Since, the
control voltage is proportional to the velocity of the
center of the shell the depiction of the control voltage
0 0.05 0.1 0.15 0.2 0.25 0.3-300
-200
-100
0
100
200
300
Time (sec)
Con
trol
vol
tage
(V
olt)
Paraboloid (R2= 10R
1)
Hyperboloid (R2= -10R
1)
Fig. 15 Comparison of
control voltages required for
the ACLD of nonlinear
transient vibrations of the
simply supported P/M/P-
MEE doubly curved shell
(R1/a = 10, Kd = 200)
0 0.05 0.1 0.15 0.2 0.25 0.30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Time (sec)
w/H
Kd = 0
Kd = 200
Fig. 16 Nonlinear transient
responses of a clamped–
clamped P/M/P-MEE
doubly curved shell
undergoing ACLD (R1/
a = 10, R2/R1 = 10)
0 0.05 0.1 0.15 0.2 0.25 0.30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Time (sec)
w/H
Kd = 0
Kd = 150
Fig. 17 Nonlinear transient
responses of a clamped–
clamped M/P/M-MEE
doubly curved shell
undergoing ACLD (R1/
a = 10, R2/R1 = 10)
S. C. Kattimani, M. C. Ray
123
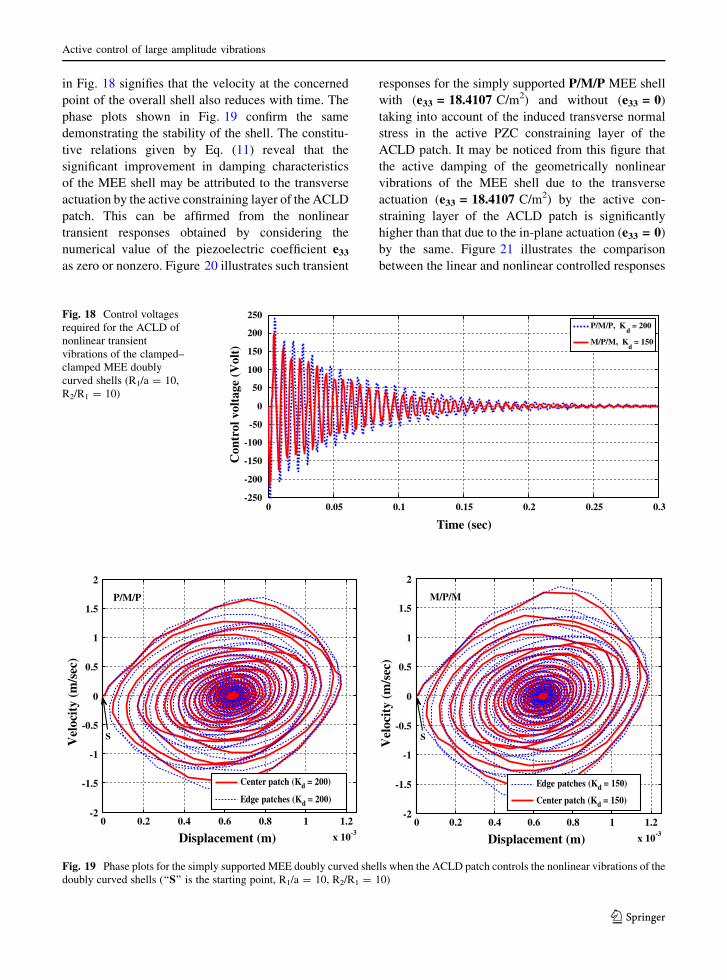
in Fig. 18 signifies that the velocity at the concerned
point of the overall shell also reduces with time. The
phase plots shown in Fig. 19 confirm the same
demonstrating the stability of the shell. The constitu-
tive relations given by Eq. (11) reveal that the
significant improvement in damping characteristics
of the MEE shell may be attributed to the transverse
actuation by the active constraining layer of the ACLD
patch. This can be affirmed from the nonlinear
transient responses obtained by considering the
numerical value of the piezoelectric coefficient e33
as zero or nonzero. Figure 20 illustrates such transient
responses for the simply supported P/M/P MEE shell
with (e33 = 18.4107 C/m2) and without (e33 = 0)
taking into account of the induced transverse normal
stress in the active PZC constraining layer of the
ACLD patch. It may be noticed from this figure that
the active damping of the geometrically nonlinear
vibrations of the MEE shell due to the transverse
actuation (e33 = 18.4107 C/m2) by the active con-
straining layer of the ACLD patch is significantly
higher than that due to the in-plane actuation (e33 = 0)
by the same. Figure 21 illustrates the comparison
between the linear and nonlinear controlled responses
0 0.05 0.1 0.15 0.2 0.25 0.3-250
-200
-150
-100
-50
0
50
100
150
200
250
Time (sec)
Con
trol
vol
tage
(V
olt)
P/M/P, Kd = 200
M/P/M, Kd = 150
Fig. 18 Control voltages
required for the ACLD of
nonlinear transient
vibrations of the clamped–
clamped MEE doubly
curved shells (R1/a = 10,
R2/R1 = 10)
0 0.2 0.4 0.6 0.8 1 1.2
x 10-3
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Displacement (m)
Vel
ocit
y (m
/sec
)
Center patch (Kd = 200)
Edge patches (Kd = 200)
0 0.2 0.4 0.6 0.8 1 1.2
x 10-3
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Displacement (m)
Vel
ocit
y (m
/sec
)
Edge patches (Kd = 150)
Center patch (Kd = 150)
SS
P/M/P M/P/M
Fig. 19 Phase plots for the simply supported MEE doubly curved shells when the ACLD patch controls the nonlinear vibrations of the
doubly curved shells (‘‘S’’ is the starting point, R1/a = 10, R2/R1 = 10)
Active control of large amplitude vibrations
123

of the simply supported P/M/P shell. The shell is
subjected to a transverse pulse load (3.2 kPa) that
causes substantial nonlinear deformations according
to the back-bone curve of the shell (Fig. 7). It may be
observed from Fig. 21 that the magnitude of nonlinear
responses is much smaller than that of the linear
responses and thus this figure corroborates that the
MEE shell undergoing geometrically nonlinear vibra-
tions exhibits hardening type nonlinearity. Particular
emphasis has been placed to investigate the effect of
variation of the piezoelectric fiber orientation angle
(k) in the obliquely reinforced 1–3 PZC constraining
layer on the control authority of the ACLD patch.
Accordingly, the piezoelectric fibers are considered to
be coplanar either with the vertical xz-plane or with
the vertical yz-plane, while the value of k is varied
with respect to vertical z-axis from -45� to 45�. To
quantify the performance of the ACLD patch for
controlling the large deflections of the MEE shell, a
performance index (Id) for computing the control
authority of the obliquely reinforced 1–3 PZC con-
straining layer is defined as follows:
Id ¼w a
2; b
2; H
2; 0
� � w a
2; b
2; H
2; 0:1
� w a
2; b
2; H
2; 0
� � 100 ð55Þ
In which, Id measures the percentage suppression of
the amplitude at the point (a/2, b/2, H/2) of the overall
MEE shell undergoing nonlinear transient vibrations
after 0.1 s from the initial time. For a particular value
of the mechanical load and maximum control voltage,
Figs. 22 and 23 illustrate that the control authority (i.e.
the performance index Id) of the ACLD patch varies
with the variation of the piezoelectric fiber orientation
angle (k) in the xz-plane while becoming maximum at
k = 0� for simply supported as well as clamped–
clamped MEE paraboloid shell and hyperboloid shell,
0 0.05 0.1 0.15 0.2 0.25 0.30
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Time (sec)
w/H
Linear (Kd = 200)
Nonlinear (Kd = 200)
Fig. 21 Linear and
nonlinear transient
responses of a P/M/P-MEE
doubly curved shell
undergoing ACLD (R1/
a = 10, R2/R1 = 10)
0 0.05 0.1 0.15 0.2 0.25 0.30
0.2
0.4
0.6
0.8
1
1.2
Time (sec)
w/H
e31= -0.1902 C/m2 , e33=18.4107 C/m2
e31 = -0.1902C/m2 , e33 = 0
Fig. 20 Contributions of
in-plane and transverse
actuations by the PZC layer
in the controlled response of
the P/M/P-MEE doubly
curved shell undergoing
geometrically nonlinear
vibration (Kd = 200, R1/
a = 10, R2/R1 = 10)
S. C. Kattimani, M. C. Ray
123

respectively. It is observed from this figure that the
performance of the ACLD patch is independent of the
sign of the piezoelectric fiber orientation angle (k) in
the 1–3 PZC constraining layer. It may also be noted
that if the matrices [Kt/], [K//], [Ktw] and [Kww] are
set to null matrices; the nonlinear transient responses
of the MEE shell will be free of the effects of the
electro–elastic and magneto–elastic couplings. Fig-
ures 24 and 25 illustrate the effects of electro-elastic
coupling and magneto–elastic coupling on the con-
trolled responses of a simply supported MEE shell for
P/M/P and M/P/M sequences, respectively. It may be
observed from Fig. 24 that the electro-elastic and the
magneto–elastic couplings marginally affect the non-
linear transient response of the P/M/P paraboloid shell
(R2/R1 = 10). It may also be noticed from this figure
that the electro-elastic coupling is higher than the
magneto–elastic coupling for P/M/P paraboloid shell
while these effects are negligible in case of the M/P/M
paraboloid shell (Fig. 25).
6 Conclusions
A three dimensional finite element analysis has been
carried out to analyze the ACLD of geometrically
nonlinear vibrations of the MEE doubly curved shells
integrated with the patches of the ACLD treatment.
The constraining layer of the ACLD treatment is
composed of the vertically/obliquely reinforced 1–3
PZC materials. The kinematics of deformations of the
overall MEE doubly curved shell is described by a
layerwise shear deformation theory and geometric
nonlinearity is modeled by using the von Karman type
strain–displacement relations. The GHM approach is
implemented for modeling the viscoelastic layer in the
-45 -40 -30 -20 -10 0 10 20 30 40 45
10
15
20
25
30
35
Piezoelectric fiber orientation angle '
I d
P/M/P-SSP/M/P-CCM/P/M-SSM/P/M-CC
Fig. 23 Variation of the
control authority of the
ACLD patch with the
piezoelectric fiber
orientation angle (k) when
the piezoelectric fibers are
coplanar with the xz-plane
for active damping of
geometrically nonlinear
vibrations of the MEE
hyperboloid doubly curved
shells (R1/a = 10, R2/
R1 = -10)
-45 -40 -30 -20 -10 0 10 20 30 40 455
10
15
20
25
30
35
40
Piezoelectric fiber orientation angle '
I d
P/M/P-SS P/M/P-CC M/P/M-SS M/P/M-CC
Fig. 22 Variation of the
control authority of the
ACLD patch with the
piezoelectric fiber
orientation angle (k) when
the piezoelectric fibers are
coplanar with the xz-plane
for active damping of
geometrically nonlinear
vibrations of the MEE
paraboloid doubly curved
shells (R1/a = 10, R2/
R1 = 10)
Active control of large amplitude vibrations
123

time domain. A simple velocity feedback control law
is employed to incorporate the active damping. The
geometrically nonlinear dynamics of the MEE shells
are of hardening type. Also, the nonlinear behavior of
the MEE doubly curved shell is influenced by the
curvature ratio, the curvature aspect ratio and the
thickness aspect ratio. The numerical results suggest
that the ACLD patches significantly improve the
active damping characteristics of the MEE shells over
the passive damping for attenuating the geometrically
nonlinear vibrations of both P/M/P and M/P/M
doubly curved shells. The performance of the single
ACLD patch placed at the center of the top surface of
the MEE shell is significantly larger than that of the
two patches placed at the edges of the shells. Having
same geometrical parameters and material properties,
paraboloid shells exhibit better damping characteris-
tics than the hyperboloid shells. The contribution of
the vertical actuation by the vertically reinforced 1–3
PZC layer for attenuating the geometrically nonlinear
vibrations of the MEE shells is considerably larger
than that of the in-plane actuation by this 1–3 PZC
layer. The performance of the ACLD patch is influ-
enced by the edge boundary conditions and the
variation of the piezoelectric fiber orientation angle
(k) for suppressing the geometrically nonlinear vibra-
tions of the MEE doubly curved shells. The control
authority of the patch becomes maximum for active
damping of geometrically nonlinear vibrations if the
constraining layer of the ACLD patches is made of the
vertically reinforced 1–3 PZC (i.e. k = 0�). The
electro-elastic and the magneto–elastic couplings
marginally affect the nonlinear transient response of
the P/M/P paraboloid shell while the coupling fields
have negligible effect in case of the M/P/M parabo-
loid shell.
0 0.05 0.1 0.15 0.2 0.25 0.30
0.2
0.4
0.6
0.8
1
1.2
Time (sec)
w/H
UncoupledMagneto-Elastic coupled fieldsElectro-Elastic coupled fieldsElectro-Elastic and Magneto-Elastic coupled fields
Fig. 24 Comparison of
coupled and uncoupled
controlled nonlinear
transient responses of a
simply supported P/M/P-MEE doubly curved shell
integrated with a patch at the
center undergoing ACLD
(Kd = 200, R1/a = 10,
R2/R1 = 10)
0 0.05 0.1 0.15 0.2 0.25 0.30
0.2
0.4
0.6
0.8
1
1.2
Time (sec)
w/H
Uncoupled fieldsMagneto-elastic coupled fieldsElectro-Elastic coupled fieldsElectro-Elastic and Magneto-Elastic coupled fields
Fig. 25 Comparison of
coupled and uncoupled
controlled nonlinear
transient responses of a
simply supported M/P/M-
MEE doubly curved shell
integrated with a patch at the
center undergoing ACLD
(Kd = 150, R1/a = 10,
R2/R1 = 10)
S. C. Kattimani, M. C. Ray
123

Appendix 1
Transformation matrices
The transformation matrices Z1½ � � Z5½ � appearing in
Eqs. (6) and (7) are given by
Z1½ � ¼ �Z1 O::
�O
h i;
Z2½ � ¼ �Z2 hvI2 RvI2
� �;
Z3½ � ¼ �I3~O ~O �Z3
� �
Z4½ � ¼ hIr=2 I::
4
~O �Z4
h i;
Z5½ � ¼ hIr=2 hvIr�Iv
�Z5
� �
�Z1 ¼
z 0 0 zR1
z2
R1
0 z 0 zR1
z2
R1
0 0 0 1 2z
0 0 z 0 0
266664
377775;
�Z2 ¼
h2
0 0 zR1
z2
R1
0 h2
0 zR1
z2
R1
0 0 0 1 2z
0 0 h2
0 0
2666664
3777775;
�Z3 ¼z 0 z2 0
0 z 0 z2
" #
Ir ¼�1R1
0
0 �1R2
" #; �I3 ¼
1� zR1
�0
0 1� zR2
�264
375;
I::
4¼
1� z::
R1
�0
0 1� z::
R2
�264
375
�Iv ¼1� Rv
R1
�0
0 1� Rv
R2
�264
375; ~I ¼
1 0 0
0 1 0
0 0 0
264
375;
I::¼
0 0
0 0
0 1
264
375; I ¼
1 0 0
0 1 0
0 0 0
0 0 1
26664
37775; I ¼
1 0 0
0 1 0
0 0 1
264
375;
�Z4 ¼ �Z5 ¼ �Z3; Rv ¼ Z� h
2� hv; z
:: ¼ z� h
2;
I2 ¼ I6 ¼ I
Submatrices
The various submatrices Btbi½ �, Brbi½ �, Btsi½ � and Brsi½ �appearing in Eq. (25) are given by
Btbi½ � ¼
oni
ox 0 1R1
0 oni
oy1
R2
oni
oyoni
ox 0
0 0 0
266664
377775; Btsi½ � ¼
�1R1
0 oni
ox
0 �1R2
oni
oy
" #;
Brbi½ � ¼
Brbi�0 �0 �0
~O I ~O ~O
�0 �0 Brbi�0
�0 �0 �0 Brbi
26664
37775 and
Brsi½ � ¼
~I I::
~0
~0 �0 I
~O Brsi�0
T
�0T
Brsi~O
26664
37775 in which,
Brbi
� �¼
oni
ox 0
0 oni
oy
oni
oyoni
ox
2664
3775; Brsi
� �¼
oni
ox 0 0
oni
oy 0 0
" #;
where, ~0; �0; ~O; �O and O::
are the (3 9 3), (3 9 2),
(2 9 2), (4 9 2) and (3 9 4) null matrices,
respectively.
Appendix 2
The various rigidity matrices and rigidity vectors
appearing in Eqs. (30)–(32) are given by
Dtb½ � ¼X3
k¼1
Zhkþ1
hk
�Csb
� �kdz;
Dtrb½ � ¼X3
k¼1
Zhkþ1
hk
�Csb
� �kZ1½ � dz;
Drrb½ � ¼X3
k¼1
Zhkþ1
hk
Z1½ �T �Csb
� �kZ1½ � dz;
Drrs½ � ¼X3
k¼1
Zhkþ1
hk
Z3½ �T �Css
� �kZ3½ � dz;
Active control of large amplitude vibrations
123

Dts½ � ¼X3
k¼1
Zhkþ1
hk
�Css
� �kdz;
Dtrs½ � ¼X3
k¼1
Zhkþ1
hk
�Css
� �kZ3½ � dz;
Dptb
� �¼Zh6
h5
�Cpb
� �dz;
Dptrb
� �¼Zh6
h5
�Cpb
� �Z2½ �dz;
Dprrb
� �¼Zh6
h5
Z2½ �T �Cpb
� �Z2½ �dz;
Dpts
� �¼Zh6
h5
�Cps
� �dz;
Dptrs½ � ¼
Zh6
h5
�Cps
� �Z5½ �dz;
Dprrs
� �¼Zh6
h5
Z2½ �T �Cps
� �Z5½ �dz;
Dtsv½ � ¼Zh5
h4
�Cvs
� �dz;
Dtrsv½ � ¼Zh5
h4
�Cvs
� �Z4½ �dz;
Drrsv½ � ¼Zh5
h4
Z4½ �T �Cvs
� �Z4½ �dz;
Dptbs
� �¼Zh6
h5
�Cbs
� �dz;
Dptrbs
� �¼Zh6
h5
�Cbs
� �Z5½ �dz;
Dprtbs
� �¼Zh6
h5
Z2½ �T �Cbs
� �dz;
Dprrbs
� �¼Zh6
h5
Z2½ �T �Cbs
� �Z5½ �dz;
Dbtp
n o¼Zh6
h5
1
hpep
b
� �dz;
Dbrp
n o¼Zh6
h5
1
hpZ2½ �T ep
b
� �dz;
Dstp
n o¼Zh6
h5
1
hpep
s
� �dz;
Dsrp
n o¼Zh6
h5
1
hpZ5½ �T ep
s
� �dz;
Dtw� �
¼Zh3
h2
qsb
� � 1
hdz;
Dt/� �
¼Zh4
h3
esb
� � 1
h1 0½ �dz
þZh2
h1
esb
� � 1
h0 1½ �dz;
Drw� �
¼Zh3
h2
Z1½ �T qsb
� � 1
hdz; Dww
� �¼ 1
hl33;
Dr/� �
¼Zh4
h3
z1½ �T esb
� � 1
h1 0½ �dz
þZh2
h1
z1½ �T esb
� � 1
h0 1½ �dz;
D//� �
¼ 2s33
h
1 0
0 1
� :
References
Alaimo, A., Benedetti, I., Milazzo, A.: A finite element formu-
lation for large deflection of multilayered magneto–elec-
tro–elastic plates. Compos. Struct. 107, 643–653 (2013)
S. C. Kattimani, M. C. Ray
123

Azvine, B., Tomlinson, G.R., Wynne, R.J.: Use of active con-
strained layer damping for controlling resonant. Smart
Mater. Struct. 4, 1–6 (1995)
Badri, T.M., Al-Kayiem, H.H.: Dynamic responses of magneto–
thermo–electro–elastic shell structures with closed-circuit
surface condition. J. Appl. Sci. 12(24), 2541–2547 (2012)
Bailey, T., Hubbard, J.E.: Distributed piezoelectric polymer
active vibration control of a cantilever beam. J. Guid.
Control Dyn. 8(5), 605–611 (1985)
Baz, A.: Robust control of active constrained layer damping.
J. Sound Vib. 211(3), 467–480 (1998)
Baz, A., Ro, J.: Vibration control of plates with active con-
strained layer damping. Smart Mater. Struct. 5, 272–280
(1996)
Bhangale, R.K., Ganesan, N.: Free vibration studies of simply
supported non-homogeneous functionally graded mag-
neto–electro–elastic finite cylindrical shells. J. Sound Vib.
288, 412–422 (2005)
Bichurin, M.I., Filippov, D.A., Petrov, V.M., Laletsin, V.M.,
Paddubnaya, N., Srinivasan, G.: Resonance magneto–
electric effects in layered magnetostrictive–piezoelectric
composites. Phys. Rev. B 68, 132408 (2003)
Buchanan, G.R.: Layered versus multiphase magneto–electro–
elastic composites. Compos. B 35, 413–420 (2004)
Chantalakhana, C., Stanway, R.: Active constrained layer
damping of clamped–clamped plate vibrations. J. Sound
Vib. 241(5), 755–777 (2001)
Crawley, E.F., Luis, J.D.: Use of piezoelectric actuators as
elements of intelligent structures. AIAA J. 25(10),
1371–1385 (1987)
Daga, A., Ganesan, N., Shankar, K.: Transient response of
magneto–electro–elastic simply supported cylinder using
finite element. Journal of Mechanics of Materials and
Structures 3(2), 375–389 (2008)
Damanpack, A.R., Bodaghi, M., Aghdam, M., Shakeri, M.:
Active control of geometrically non-linear transient
response of sandwich beams with a flexible core using
piezoelectric patches. Compos. Struct. 100, 517–531
(2013)
Gao, J.X., Shen, Y.P.: Active control of geometrically nonlinear
transient vibration of composite plates with piezoelectric
actuators. J. Sound Vib. 264, 911–928 (2003)
Hou, P.-F., Leung, A.Y.T.: The transient responses of magneto–
electro–elastic hollow cylinders. Smart Mater. Struct. 13,
762–776 (2004)
Illaire, H., Kropp, W.: Quantification of damping mechanisms
of active constrained layer treatments. J. Sound Vib. 281,
189–217 (2005)
Kanasogi, R.M., Ray, M.C.: Control of geometrically nonlinear
vibrations of skew laminated composite plates using skew
or rectangular 1–3 piezoelectric patches. Int. J. Mech.
Mater. Des. 9(4), 325–354 (2013)
Kulkarni, S.A., Bajoria, K.M.: Geometrically nonlinear analysis
of smart thin and sandwich plates. J. Sandw. Struct. Mater.
8, 321–341 (2006)
Kumar, R.S., Ray, M.C.: Active control of geometrically non-
linear vibrations of doubly curved smart sandwich shells
using 1–3 piezoelectric composites. Compos. Struct. 105,
173–187 (2013)
Lang, Z., Xuewu, Li.: Buckling and vibration analysis of
functionally graded magneto–electro–thermo–elastic
circular cylindrical shells. Appl. Math. Model. 37,
2279–2292 (2012)
Lim, Y.-H., Varadan, V.V., Varadan, K.V.: Closed loop finite
element modeling of active constrained layer damping in
the time domain analysis. Smart Mater. Struct. 11, 89–97
(2002)
Liu, M.F., Chang, T.P.: Closed form expression for the vibration
problem of a transversely isotropic magneto–electro–
elastic plate. J. Appl. Mech. 77(024502), 1–8 (2010)
Loja, M.A.R., Soares, C.M.M., Barbosa, J.I.: Optimization of
magneto–electro–elastic composite structures using dif-
ferential evolution. Compos. Struct. 107, 276–287 (2014)
Mc Tavish, D.J., Hughes, P.C.: Modelling of linear viscoelastic
space structures. J. Vib. Acoust. 115(1), 103–113 (1993)
Milazzo, A: Large deflection of magneto–electro–elastic lami-
nated plates. Appl. Math. Model. (2013). doi:10.1016/j.
apm.2013.08.034
Moita, J.M.S., Soares, C.M.M., Soares, C.A.M.: Geometrically
nonlinear analysis of composite structures with integrated
piezoelectric sensors and actuators. Compos. Struct. 57,
253–261 (2002)
Moita, J.M.S., Soares, C.M.M., Soares, C.A.M.: Analysis of
magneto–electro–elastic plates using higher order finite
element model. Compos. Struct. 91, 421–426 (2009)
Nan, C.W.: Magnetoelectric effect in composites of piezoelec-
tric and piezomagnetic phases. Phys. Rev. B B50,
6082–6088 (1994)
Newnham, R.E., Bowen, L.J., Klicker, K.A., Cross, L.E.:
Composite piezoelectric transducers. Mater. Eng. 2,
93–106 (1980)
Pan, E.: Exact solution for simply supported and multilayered
magneto–electro–elastic plates. ASME Trans. 68(4),
608–618 (2001)
Pan, E., Heyliger, P.R.: Free vibrations of simply supported and
multilayered magneto–electro–elastic plates. J. Sound Vib.
252(3), 429–442 (2002)
Pradhan, S.C.: Vibration suppression analysis of FGM shells
with higher order shear deformation theory. J. Mech.
Mater. Struct. 4(1), 35–56 (2009)
Qin, Z.: Magneto–thermo–elasticity of an electro-conductive
circular cylindrical shell featuring nonlinear deformations.
Int. J. Eng. Sci. 48, 1797–1870 (2010)
Ramirez, F., Heyliger, P.R., Pan, E.: Discrete layer solution to
free vibrations of functionally graded magneto–electro–
elastic plates. Mech. Adv. Mater. Struct. 13, 249–266 (2006)
Ray, M.C., Faye, A.: Active structural-acoustic control of
laminated composite plates using vertically/obliquely
reinforced 1–3 piezoelectric composite patch. Int. J. Mech.
Mater. Des. 5(2), 123–141 (2009)
Ray, M.C., Mallik, N.: Performance of smart damping treatment
using piezoelectric fiber-reinforced composites. AIAA J.
43(1), 184–193 (2005)
Ray, M.C., Pradhan, A.K.: Performance of vertically reinforced
1–3 piezoelectric composites for active damping of smart
structures’’. Smart Mater. Struct. 15(1), 631–641 (2006)
Ray, M.C., Oh, J., Baz, A.: Active constrained layer damping of
thin cylindrical shells. J. Sound Vib. 240(5), 921–935 (2001)
Sarangi, S.K., Ray, M.C.: Smart damping of geometrically
nonlinear vibrations of laminated composite beams using
vertically reinforced 1–3 piezoelectric composites. Smart
Mater. Struct. 19, 075020 (2010)
Active control of large amplitude vibrations
123

Sarangi, S.K., Ray, M.C.: Active damping of geometrically
nonlinear vibrations of laminated composite plates using
vertically reinforced 1–3 piezoelectric composites. Acta
Mech. 222, 363–380 (2011)
Sladek, J., Sladek, V., Krahulec, S., Pan, E.: The MLPG analysis
of large deflections of magnetoelectroelastic plates. Eng.
Anal. Bound. Elem. 37, 673–682 (2013)
Tsai, Y.H., Wu, C.P., Syu, S.Y.: Three-dimensional analysis of
doubly curved functionally graded magneto–electro–elas-
tic shells. Eur. J. Mech. A 27, 79–105 (2008)
Van Den Boomgaard, J., Van Run, A.M.J.G., Van Suchtelen, J.:
Piezoelectric–piezomagnetic composites with magneto–
electric effect. Ferroelectrics 4, 727–728 (1976)
Wu, C.-P., Tsai, Y.-H.: Dynamic responses of functionally
graded magneto–electro–elastic shells with closed-circuit
surface conditions using method of multiple scales. Eur.
J. Mech. A 29, 166–181 (2010)
Xue, C.X., Pan, E., Zhang, S.Y., Chu, H.J.: Large deflection of a
rectangular magnetoelectroelastic thin plate. Mech. Res.
Commun. 38, 518–523 (2011)
Wang, H.M., Ding H.J.: Radial vibration of piezoelectric/mag-
netostrictive composite hollow sphere. J. Sound Vib.. Vol.
307, pp.330-348
S. C. Kattimani, M. C. Ray
123
Copyright © 2022 FDOKUMEN




















