FGM and laminated doubly curved shells and panels of revolution with a free-form meridian: A 2-D GDQ...
25
FGM and laminated doubly curved shells and panels of revolution with a free-form meridian: A 2-D GDQ solution for free vibrations Francesco Tornabene n , Alfredo Liverani, Gianni Caligiana DIEM—Department, Faculty of Engineering, viale Risorgimento 2, University of Bologna, 40100 Bologna, Italy article info Article history: Received 15 February 2011 Received in revised form 24 March 2011 Accepted 29 March 2011 Available online 9 April 2011 Keywords: Free vibrations Doubly curved shells of revolution Rational Be ´ zier curves Laminated composite shells Functionally graded materials Generalized differential quadrature method abstract In this paper, the generalized differential quadrature (GDQ) method is applied to study the dynamic behavior of functionally graded materials (FGMs) and laminated doubly curved shells and panels of revolution with a free-form meridian. The First-order Shear Deformation Theory (FSDT) is used to analyze the above mentioned moderately thick structural elements. In order to include the effect of the initial curvature a generalization of the Reissner–Mindlin theory, proposed by Toorani and Lakis, is adopted. The governing equations of motion, written in terms of stress resultants, are expressed as functions of five kinematic parameters, by using the constitutive and kinematic relationships. The solution is given in terms of generalized displacement components of points lying on the middle surface of the shell. Simple Rational Be ´ zier curves are used to define the meridian curve of the revolution structures. Firstly, the differential quadrature (DQ) rule is introduced to determine the geometric parameters of the structures with a free-form meridian. Secondly, the discretization of the system by means of the GDQ technique leads to a standard linear eigenvalue problem, where two independent variables are involved. Results are obtained taking the meridional and circumferential co-ordinates into account, without using the Fourier modal expansion methodology. Comparisons between the Reissner–Mindlin and the Toorani–Lakis theory are presented. Furthermore, GDQ results are compared with those obtained by using commercial programs such as Abaqus, Ansys, Nastran, Straus and Pro/Mechanica. Very good agreement is observed. Finally, different lamination schemes are considered to expand the combination of the two functionally graded four-parameter power-law distributions adopted. The treatment is developed within the theory of linear elasticity, when materials are assumed to be isotropic and inhomogeneous through the lamina thickness direction. A two- constituent functionally graded lamina consists of ceramic and metal those are graded through the lamina thickness. A parametric study is performed to illustrate the influence of the parameters on the mechanical behavior of shell and panel structures considered. & 2011 Elsevier Ltd. All rights reserved. 1. Introduction Shells have been widespread in many fields of engineering as they give rise to optimum conditions for dynamic behavior, strength and stability. The vibration effects on these structures caused by different phenomena can have serious consequences for their strength and safety. Therefore, an accurate frequency and mode shape determination is of considerable importance for the technical design of these structural elements. The aim of this paper is to study the dynamic behavior of doubly curved shell structures derived from shells of revolution, which are very common structural elements. This research work is based on four aspects. The first is the improvement of the Reissner–Mindlin theory using the Toorani– Lakis theory. In this way the effect of the curvature of the shell structure is considered. The second is the generalization of the shape of the shell meridian. The free-form (Rational Be ´ zier or NURBS) meridian curve assumption requires the differential quadrature rule to evaluate the geometric parameters needed to describe the geometry of the structure. The third is the combina- tion of the composite lamination scheme with functionally graded materials in order to expand the design profiles through the whole thickness of the shell. The four is the use of the generalized differential quadrature method to solve the governing equations of motion. During the last 60 years, two-dimensional linear theories of thin shells have been developed including important contribu- tions by Timoshenko and Woinowsky-Krieger [1], Fl¨ ugge [2], Gol’Denveizer [3], Novozhilov [4], Vlasov [5], Ambartusumyan Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/ijmecsci International Journal of Mechanical Sciences 0020-7403/$ - see front matter & 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.ijmecsci.2011.03.007 n Corresponding author. E-mail address: [email protected] (F. Tornabene). International Journal of Mechanical Sciences 53 (2011) 446–470
-
Upload
independent -
Category
Documents
-
view
7 -
download
0
Transcript of FGM and laminated doubly curved shells and panels of revolution with a free-form meridian: A 2-D GDQ...

FGM and laminated doubly curved shells and panels of revolution with afree-form meridian: A 2-D GDQ solution for free vibrations
Francesco Tornabene n, Alfredo Liverani, Gianni Caligiana
DIEM—Department, Faculty of Engineering, viale Risorgimento 2, University of Bologna, 40100 Bologna, Italy
a r t i c l e i n f o
Article history:
Received 15 February 2011
Received in revised form
24 March 2011
Accepted 29 March 2011Available online 9 April 2011
Keywords:
Free vibrations
Doubly curved shells of revolution
Rational Bezier curves
Laminated composite shells
Functionally graded materials
Generalized differential quadrature method
a b s t r a c t
In this paper, the generalized differential quadrature (GDQ) method is applied to study the dynamic
behavior of functionally graded materials (FGMs) and laminated doubly curved shells and panels of
revolution with a free-form meridian. The First-order Shear Deformation Theory (FSDT) is used to
analyze the above mentioned moderately thick structural elements. In order to include the effect of the
initial curvature a generalization of the Reissner–Mindlin theory, proposed by Toorani and Lakis, is
adopted. The governing equations of motion, written in terms of stress resultants, are expressed as
functions of five kinematic parameters, by using the constitutive and kinematic relationships. The
solution is given in terms of generalized displacement components of points lying on the middle
surface of the shell. Simple Rational Bezier curves are used to define the meridian curve of the
revolution structures. Firstly, the differential quadrature (DQ) rule is introduced to determine the
geometric parameters of the structures with a free-form meridian. Secondly, the discretization of the
system by means of the GDQ technique leads to a standard linear eigenvalue problem, where two
independent variables are involved. Results are obtained taking the meridional and circumferential
co-ordinates into account, without using the Fourier modal expansion methodology. Comparisons
between the Reissner–Mindlin and the Toorani–Lakis theory are presented. Furthermore, GDQ results
are compared with those obtained by using commercial programs such as Abaqus, Ansys, Nastran,
Straus and Pro/Mechanica. Very good agreement is observed. Finally, different lamination schemes are
considered to expand the combination of the two functionally graded four-parameter power-law
distributions adopted. The treatment is developed within the theory of linear elasticity, when materials
are assumed to be isotropic and inhomogeneous through the lamina thickness direction. A two-
constituent functionally graded lamina consists of ceramic and metal those are graded through the
lamina thickness. A parametric study is performed to illustrate the influence of the parameters on the
mechanical behavior of shell and panel structures considered.
& 2011 Elsevier Ltd. All rights reserved.
1. Introduction
Shells have been widespread in many fields of engineering as
they give rise to optimum conditions for dynamic behavior,
strength and stability. The vibration effects on these structures
caused by different phenomena can have serious consequences
for their strength and safety. Therefore, an accurate frequency and
mode shape determination is of considerable importance for the
technical design of these structural elements. The aim of this
paper is to study the dynamic behavior of doubly curved shell
structures derived from shells of revolution, which are very
common structural elements.
This research work is based on four aspects. The first is the
improvement of the Reissner–Mindlin theory using the Toorani–
Lakis theory. In this way the effect of the curvature of the shell
structure is considered. The second is the generalization of the
shape of the shell meridian. The free-form (Rational Bezier or
NURBS) meridian curve assumption requires the differential
quadrature rule to evaluate the geometric parameters needed to
describe the geometry of the structure. The third is the combina-
tion of the composite lamination scheme with functionally graded
materials in order to expand the design profiles through the
whole thickness of the shell. The four is the use of the generalized
differential quadrature method to solve the governing equations
of motion.
During the last 60 years, two-dimensional linear theories of
thin shells have been developed including important contribu-
tions by Timoshenko and Woinowsky-Krieger [1], Flugge [2],
Gol’Denveizer [3], Novozhilov [4], Vlasov [5], Ambartusumyan
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/ijmecsci
International Journal of Mechanical Sciences
0020-7403/$ - see front matter & 2011 Elsevier Ltd. All rights reserved.
doi:10.1016/j.ijmecsci.2011.03.007
n Corresponding author.
E-mail address: [email protected] (F. Tornabene).
International Journal of Mechanical Sciences 53 (2011) 446–470

[6], Kraus [7], Leissa [8,9], Markus [10], Ventsel and Krauthammer
[11] and Soedel [12]. All these contributions are based on the
Kirchhoff–Love assumptions. This theory, named Classical Shell
Theory (CST), assumes that normals to the shell middle-surface
remain straight and normal to it during deformations and
unstretched in length. Many researchers analyzed various char-
acteristics of thin shell structures [13–18].
When the theories of thin shells are applied to thick shells, the
errors could be quite large. With the increasing use of thick shells
in various engineering applications, simple and accurate theories
for thick shells have been developed. With respect to thin shells,
thick shell theories take the transverse shear deformation and
rotary inertia into account. The transverse shear deformation has
been incorporated into shell theories by following the theory of
Reissner–Mindlin [19], also named First-order Shear Deformation
Theory (FSDT). Abandoning the assumption on the preservation
of the normals to the shell middle surface after the deformation, a
comprehensive analysis for elastic isotropic shells was made by
Kraus [7] and Gould [20,21]. The present work is just based on the
FSDT. In order to include the effect of the initial curvature a
generalization of the Reissner–Mindlin theory (RMT) has been
proposed by Toorani and Lakis [22]. In this way the Reissner–
Mindlin theory becomes a particular case of the Toorani–Lakis
theory (TLT). As a consequence of the use of this general theory
the stress resultants directly depend on the geometry of the
structure in terms of the curvature coefficients and the hypothesis
of the symmetry of the in-plane shearing force resultants and the
torsional couples declines. In this paper the Toorani–Lakis theory
is considered and improved. Comparisons between the Reissner–
Mindlin and the Toorani–Lakis theory are presented. No results
are available in the literature about the Toorani–Lakis theory for
doubly curved shells. As for the vibration analysis of such
revolution shells, several studies have been presented earlier.
The most popular numerical tool in carrying out the above
analyses is currently the finite element method [20,21,23]. The
generalized collocation method based on the ring element
method has also been applied. With regard to the latter method,
each static and kinematic variable is transformed into a theore-
tically infinite Fourier series of harmonic components, with
respect to the circumferential co-ordinates [24–30]. In other
word, when dealing with a completely closed shell, the 2D
problem can be reduced using standard Fourier decomposition.
For a panel, however, it is not possible to perform such a
reduction operation, and the two-dimensional field must be dealt
with directly, as will just be done in this paper. The governing
equations of motion are a set of five partial differential equations
with variable coefficients, depending on two independent vari-
ables. By doing so, it is possible to compute the complete
assessment of the modal shapes corresponding to natural fre-
quencies of panel structures. It should be noted that there is
comparatively little literature available for these latter structures,
compared to the literature regarding the free vibration analysis
of complete shells of revolution. Complete revolution shells
are obtained as special cases of shell panels by satisfying the
kinematical and physical compatibility at the common meridian
with W¼0,2p.The excellent mathematical and algorithmic properties, com-
bined with successful industrial applications, have contributed to
the enormous popularity of the Rational Bezier and Non-Uniform
Rational B-Splines (NURBS) curves. These curves have become the
de facto industry standard for the representation, design and data
exchange of geometric information processed by computers
[31–34]. Many national and international standards recognize
these curves as a powerful tool for geometric design. Further-
more, these curves allow to generalize the shape of the meridian
and can be used for the optimization of the structure itself. In fact,
by changing the control polygon it is possible to easy modify the
shape and then to improve the mechanical behavior of the shell
structure. By introducing the differential quadrature rule [35] and
the simple mathematical formulation of the Rational Bezier and
NURBS curves [31,32] it is possible to numerically evaluate the
geometric parameters of a free-form shell of revolution. For a sake
of simplicity and without losing generality, only Rational Bezier
curves are used in this work.
Functionally graded materials (FGMs) are a class of composites
that have a smooth and continuous variation of material proper-
ties from one surface to another and thus can alleviate the stress
concentrations found in laminated composites. Typically, these
materials consist of a mixture of ceramic and metal, or a
combination of different materials. One of the advantages of
using functionally graded materials is that they can survive
environments with high temperature gradients, while maintain-
ing structural integrity. Furthermore, the continuous change in
the compositions leads to a smooth change in the mechanical
properties, which has many advantages over the laminated
composites, where the delamination and cracks are most likely
to initiate at the interfaces due to the abrupt variation in
mechanical properties between laminae.
In this study, ceramic–metal graded shells of revolution with
two different power-law variations of the volume fraction of the
constituents in the thickness direction are considered. The effect
of the power-law exponent and of the power-law distribution
choice on the mechanical behavior of functionally graded shells
and panels is investigated. In the last years, some researchers
have analyzed various characteristics of functionally graded
structures [36–51]. However, this paper is motivated by the lack
of studies in the technical literature concerning to the free
vibration analysis of functionally graded shells and panels and
the effect of the power-law distribution choice on their mechan-
ical behavior. The aim is to analyze the influence of constituent
volume fractions and the effects of constituent material profiles
on the natural frequencies. Concerning this purpose, two different
four-parameter power-law distributions, proposed by Tornabene
[51] are considered for the ceramic volume fraction. Various
material profiles through the functionally graded lamina thick-
ness are used by varying the four parameters of power-law
distributions. Classical volume fracture profiles can be obtained
as special cases of the general distribution laws. Furthermore, the
homogeneous isotropic material can be inferred as a special case
of functionally graded materials. Differently from previous work
[51] the lamination scheme of laminated composite shell allows
to expand the combination of the two functionally graded four-
parameter power-law distributions. New profiles are presented
and investigated. A parametric study is undertaken, giving insight
into the effects of the material composition on the natural
frequencies of doubly curved shell structures. Vibration charac-
teristics are illustrated by varying one parameter at a time as a
function of the power-law exponent.
In the GDQ method the governing differential equations of
motion are directly transformed in one step to obtain the final
algebraic form. The interest of researches in this procedure is
increasing due to its great simplicity and versatility. As shown in
the literature [52], GDQ technique is a global method, which can
obtain very accurate numerical results by using a considerably
small number of grid points. Therefore, this simple direct proce-
dure has been applied in a large number of cases [53–76] to
circumvent the difficulties of programming complex algorithms
for the computer, as well as the excessive use of storage and
computer time. In conclusion, the aim of the present paper is to
demonstrate an efficient and accurate application of the differ-
ential quadrature approach, by solving the equations of motion
governing the free vibration of functionally graded and laminated
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470 447

composite doubly curved moderately thick shells and panels of
revolution with a free-form meridian, taking two independent co-
ordinates into account.
2. Geometry description and shell fundamental systems
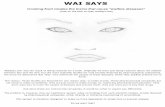
The basic configuration of the problem considered here is a
laminated composite doubly curved shell as shown in Fig. 1. The
co-ordinates along the meridional and circumferential directions
of the reference surface are j and s, respectively. The distance of
each point from the shell mid-surface along the normal is z.
Consider a laminated composite shell made of l laminae or plies,
where the total thickness of the shell h is defined as
h¼X
l
k ¼ 1
hk ð1Þ
in which hk ¼ zkþ1�zk is the thickness of the kth lamina or ply.
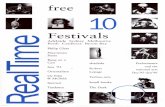
In this work, doubly curved shells of revolution with a free-
form meridian curve are considered. The angle formed by the
extended normal n to the reference surface and the axis of
rotation x3, or the geometric axis x03 of the meridian curve, is
defined as the meridional angle j and the angle between the
radius of the parallel circle R0(j) and the x1-axis is designated as
the circumferential angle W as shown in Fig. 2. For these structures
the parametric co-ordinates (j,s) define, respectively, the mer-
idional curves and the parallel circles upon the middle surface of
the shell. The curvilinear abscissa s(j) of a generic parallel is
related to the circumferential angle W by the relation s¼WR0. The
horizontal radius R0(j) of a generic parallel of the shell represents
the distance of each point from the axis of revolution x3. Rb is the
shift of the geometric axis of the curved meridian x03 with
reference to the axis of revolution x3. The position of an arbitrary
point within the shell material is defined by co-ordinates jðj0rjrj1Þ, sð0rsrs0Þ upon the middle surface, and z direc-
ted along the outward normal and measured from the reference
surface ð�h=2rzrh=2Þ.
The geometry of shells considered is a surface of revolution
with a free-form meridian (Fig. 2). A simple way to define a
general meridian curve is to use the well-known Rational Bezier
representation of a plane curve [31,32]. In particular, it is possible
to describe a Rational Bezier curve in the following manner:
_x1ðuÞ ¼
Pni ¼ 0 Bi,nðuÞwix1iPn
i ¼ 0 Bi,nðuÞwi
,
_x0
3ðuÞ ¼
Pni ¼ 0 Bi,nðuÞwix
03i
Pni ¼ 0 Bi,nðuÞwi
ð2Þ
where uA ½0,1� is the curve parameter, wi are the weights
and ðx1i,x03iÞ are the co-ordinates of the curve control points.
Furthermore, the classical nth degree Bernstein polynomials are
given by
Bi,nðuÞ ¼n!
i!ðn�iÞ!uið1�uÞn�i ð3Þ
In this way, only the co-ordinates of the curve ð_x1i,
_x0
3iÞ,
i¼ 1,2,. . .,m, are known in the co-ordinate system O0x1x03. In a
more general case, it is possible to suppose that the curve is
described by a sufficient number of points.
In order to solve the shell problem, it is important to express
the horizontal radius R0(j) of a generic parallel and the radii of
curvature Rj(j), RW(j) in the meridional and circumferential
directions as functions of j.
On the basis of differential geometry [59], the radius of
curvature of the meridian curve can be described using the
following expression as a function of x03:
Rjðx03Þ ¼
ð1þðdx1=dx03Þ
2Þ3=2
9ðd2x1=dx023 Þ9ð4Þ
The derivatives of the curve are not known a priori, so there is
need a numeric method to evaluate the first and second deriva-
tives of the curve. The differential quadrature rule allows to
approximate these derivatives using the following definition [35]:
dnf ðxÞ
dxnx ¼ xi
¼X
N
j ¼ 1
BðnÞijf ðxjÞ, i¼ 1,2,. . .,N
�
�
�
�
�
�
ð5Þ
1
2
k
l
ζ
s
2
h
2
h
hk = �k − �k+1
�l+1�l
��1
�2
�k+1
�k�
�
Fig. 1. Co-ordinate system of a laminated composite doubly curved shell.
ϑ
3x′
2x
1xO′
( )0R ϕ1x
ϕ
( )0R ϕ
Rϕ
Rϑ
1 ϕ=t t
2 s=t tn
dϕ
bR
n
3x
O
O
s
1C
2C
Fig. 2. Shell geometry: (a) meridional section and (b) circumferential section.
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470448

where B nð Þ
ij are the weighting coefficients of the nth order
derivative.
By discretizing the domain IA ½_x
0
31,
_x0
3m� using the Chebyshev–
Gauss–Lobatto (C–G–L) grid distribution:
_x0
3i ¼ 1�cosi�1
N�1p
� �� �
ð_x
0
3m�_x
0
31Þ
2þ_x
0
31, i¼ 1,2,. . .,N for x0
3A_x
0
31,
_x0
3m
� �
ð6Þ
and interpolating the_x1 co-ordinates of the curve points derived
by Eq. (2) using the previous calculated points (6), the general
curve can be represented by the following new co-ordinates
points ðx1i,x03iÞ, for i¼ 1,2,. . .,N.
Applying the differential quadrature definition (5), expression
(4) assumes the following discrete aspect:
Rjðx03iÞ ¼
1þPN
j ¼ 1 Bx03ð1Þij x1i
� �2� �3=2
PNj ¼ 1 B
x03ð2Þij x1i
�
�
�
�
�
�
, i¼ 1,2,. . .,N ð7Þ
where Bx03ðnÞ
ij are the weighting coefficients evaluated in the
domain IA ½_x
0
31,
_x0
3m�.
As a result of the differential geometry [59], it is possible to
introduce the following expression:
j¼p
2�arctan
dx1dx03
� �
ð8Þ
By using the differential quadrature definition (5), relation (8)
can be expressed in discrete form:
ji ¼ jðx03iÞ ¼
p
2�arctan
X
N
j ¼ 1
Bx03ð1Þij x1i
0
@
1
A
, i¼ 1,2,. . .,N ð9Þ
By discretizing the domain IjA ½j1,jN� using the Chebyshev–
Gauss–Lobatto (C–G–L) grid distribution:
ji ¼ 1�cosi�1
N�1p
� �� �
jN�j1
2þj1, i¼ 1,2,. . .,N
for jA ½j1,jN� ð10Þ
and interpolating the x1 and x03 co-ordinates of the curve points
using the calculated points (10), the general curve can be
represented by the following new co-ordinates points ð ~x1i, ~x03iÞ,
for i¼ 1,2,. . .,N. Thus, all the discrete points of the curve are
determined in terms of the co-ordinates ð ~x1i, ~x03iÞ and the angle ji.
For all the numerical interpolations considered above the interp1
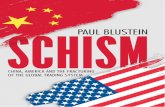
function of MATLAB program has been used. In Fig. 3 a Rational
Bezier curve, its control points and the curve co-ordinates ð ~x1i, ~x03iÞ,
evaluated as above exposed, are represented. The vectors of the
control points and the weights used in Fig. 3 are the following:
x1 ¼ 0:2 0:7 1:2 1:4 1:4 1:2� �
x03 ¼ 0 0:2 0:6 1 1:5 2
� �
w¼ ½1 1 1 1 1 1� ð11Þ
Based on the previous considerations, the horizontal radius
R0(j) of a shells of revolution assumes the following discrete
form:
R0i ¼ R0ðjiÞ ¼ ~x1iþRb, i¼ 1,2,. . .,N ð12Þ
For doubly curved shells of revolution the Gauss–Codazzi
relation can be expressed as follows:
dR0
dj¼ Rj cosj ð13Þ
By using the differential quadrature definition (5), it is possible
to determine the radius of curvature Rj(j) in meridional
direction and its first derivative in discrete form:
Rji ¼ RjðjiÞ ¼1
cosji
X
N
j ¼ 1
Bjð1Þij
R0i, i¼ 1,2,. . .,N ð14Þ
dRj
dji
¼dRj
djji
¼X
N
j ¼ 1
Bjð1Þij
Rji, i¼ 1,2,. . .,N
�
�
�
�
�
�
�
�
�
�
�
�
ð15Þ
Finally, as a results of the differential geometry [59], the radius
of curvature RW(j) in circumferential direction for a shell of
revolution can be expressed as follows in discrete form:
RWi ¼ RWðjiÞ ¼R0i
sinji
ð16Þ
Following the previous considerations, all the useful geometric
parameters describing the surface of revolution under considera-
tion are known in discrete form. As shown, the differential
quadrature rule (5) has been used to approximate the derivatives
needed for the definition of the geometry of a free-form meridian
shell of revolution.
As concerns the shell theory, the present work is based on the
following assumptions: (1) the transverse normal is inextensible
so that the normal strain is equal to zero: en ¼ enðj,s,z,tÞ ¼ 0;
(2) the transverse shear deformation is considered to influence
the governing equations so that normal lines to the reference
surface of the shell before deformation remain straight, but not
necessarily normal after deformation (a relaxed Kirchhoff–Love
hypothesis); (3) the shell deflections are small and the strains are
infinitesimal; (4) the shell is moderately thick, therefore it is
possible to assume that the thickness-direction normal stress is
negligible so that the plane assumption can be invoked:
sn ¼ snðj,s,z,tÞ ¼ 0; (5) the linear elastic behavior of anisotropic
materials is assumed and (6) the rotary inertia and the initial
curvature are also taken into account.
Consistent with the assumptions of a moderately thick shell
theory reported above, the displacement field considered in this
study is that of the First-order Shear Deformation Theory and can
be put in the following form:
Ujðj,s,z,tÞ ¼ ujðj,s,tÞþzbjðj,s,tÞ
Usðj,s,z,tÞ ¼ usðj,s,tÞþzbsðj,s,tÞ
Wðj,s,z,tÞ ¼wðj,s,tÞ ð17Þ
Fig. 3. A rational Bezier curve ð_x
0
1i ,_x
0
3iÞ, its control points ðx1i,x03iÞ and curve discrete
points evaluated ð ~x1i , ~x03iÞ.
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470 449

where uj, us, w are the displacement components of points lying
on the middle surface (z¼0) of the shell, along meridional,
circumferential and normal directions, respectively, while t is
the time variable. bj and bs are normal-to-mid-surface rotations,
respectively. The kinematic hypothesis expressed by Eq. (17)
should be supplemented by the statement that the shell deflec-
tions are small and strains are infinitesimal, that is wðj,s,tÞ5h.
In-plane displacements Uj and Us vary linearly through the
thickness, while W remains independent of z.
Relationships between strains and displacements along the
shell reference surface (z¼0) are as follows:
e0j ¼1
Rj
@uj@j
þw
� �
, e0s ¼@us
@sþ
uj cosj
R0þ
wsinj
R0, g0j ¼
1
Rj
@us
@j,
g0s ¼@uj@s
�us cosj
R0
wj ¼1
Rj
@bj@j
,ws ¼@bs
@sþbj cosj
R 0, oj ¼
1
Rj
@bs
@j,
os ¼@bj@s
�bs cosj
R0
gjn ¼1
Rj
@w
@j�uj
� �
þbj, gsn ¼@w
@s�us sinj
R 0þbs ð18Þ
In the above relations (18), the first four strains
e0 ¼ ½e0je0s g
0jg
0s �
T are the in-plane meridional, circumferential and
shearing components, and v0 ¼ ½wjwsojos�T are the analogous
curvature changes. The last two components c0 ¼ ½gjngsn�T are the
transverse shearing strains.
The shell material assumed in the following is a laminated
composite linear elastic one. Accordingly, the constitutive equa-
tions relate internal stress resultants and internal couples with
generalized strain components (18) on the middle surface and can
be written in compact form:
N
M
T
2
6
4
3
7
5¼
A B 0
B D 0
0 0 C
2
6
4
3
7
5þa1
B0 D0 0
D0 E0 0
0 0 C0
2
6
4
3
7
5þa2
D0 E0 0
E0 F0 0
0 0 G’
2
6
4
3
7
5þa3
E0 F0 0
F0 H0 0
0 0 J0
2
6
4
3
7
5
0
B
@
þb1
B00 D00 0
D00 E00 0
0 0 C00
2
6
4
3
7
5þb2
D00 E00 0
E00 F00 0
0 0 G00
2
6
4
3
7
5þb3
E00 F00 0
F00 H00 0
0 0 J00
2
6
4
3
7
5
1
A
e0
v0
c0
2
6
4
3
7
5
ð19Þ
The extended notation of relations (19) can be found in the
article by Tornabene [76], in which all the matrices above
introduced are explicitly defined. Furthermore, the shear correc-
tion factor k is usually taken as k¼5/6, such as in the present
work. In particular, the determination of shear correction factors
for composite laminated structures is still an unresolved issue,
because these factors depend on various parameters [77–79].
In Eq. (19), the four components N¼ ½NjNsNjsNsj�T are the
in-plane meridional, circumferential and shearing force resul-
tants, and M¼ ½MjMsMjsMsj�T are the analogous couples, while
T¼ ½TjTs�T are the transverse shear force resultants. In the above
definitions (19) the symmetry of shearing force resultants Njs,Nsj
and torsional couples Mjs,Msj is not assumed as a further
hypothesis, as done in the Reissner–Mindlin theory. This hypoth-
esis is satisfied only in the case of spherical shells and flat plates.
This assumption is derived from the consideration that ratios
z=Rj,z=Rs cannot be neglected with respect to unity. Thus, the
curvature coefficients are introduced and determined as follows:
a1 ¼sinj
R0�
1
Rj,a2 ¼�
1
Rja1,a3 ¼
1
R2j
a1
b1 ¼�a1,b2 ¼sinj
R0a1,b3 ¼�
sin2j
R20
a1 ð20Þ
The curvature coefficients a3 and b3 are different from those
proposed by Toorani and Lakis [22]. This is due to the fact that in
the work [22] a term has been forgotten in the expansion and the
subsequent approximations of the curvature coefficients a3, b3. In
this way the symmetry of shearing force resultants Njs,Nsj and
torsional couples Mjs,Msj is satisfied and guaranteed for sphe-
rical shells, as previously highlighted. Thus, the Toorani–Lakis and
the Reissner–Mindlin theory coincides in the case of spherical
shells as well as in the case of circular and rectangular plates, due
to the fact that all the curvature coefficients are equal to zero.
For the functionally graded material kth lamina the elastic
constants Q ðkÞij ¼Q ðkÞ
ij ðzÞ [51,75,76] in the material co-ordinate
system O0jsz (Fig. 4) are functions of thickness coordinate
zðzA ½zk,zkþ1�Þ and are defined as
Q ðkÞ11 ðzÞ ¼
EðkÞ1 ðzÞ
1�nðkÞ12ðzÞnðkÞ21ðzÞ
, Q ðkÞ22 ðzÞ ¼
EðkÞ2 ðzÞ
1�nðkÞ12ðzÞnðkÞ21ðzÞ
, Q ðkÞ12 ðzÞ ¼
nðkÞ12ðzÞEðkÞ2 ðzÞ
1�nðkÞ12ðzÞnðkÞ21ðzÞ
Q ðkÞ66 ðzÞ ¼ GðkÞ
12ðzÞ, Q ðkÞ44 ðzÞ ¼ GðkÞ
13ðzÞ, Q ðkÞ55 ðzÞ ¼ GðkÞ
23ðzÞ ð21Þ
where the following relations have to be introduced:
EðkÞ1 ðzÞ ¼ EðkÞ2 ðzÞ ¼ EðkÞ3 ðzÞ ¼ EðkÞðzÞ
nðkÞ12ðzÞ ¼ nðkÞ21ðzÞ ¼ nðkÞ13ðzÞ ¼ nðkÞ23ðzÞ ¼ nðkÞðzÞ
GðkÞ12ðzÞ ¼ GðkÞ
13ðzÞ ¼ GðkÞ23ðzÞ ¼ GðkÞðzÞ ð22Þ
Typically, the functionally graded materials are made of a
mixture of two constituents. In this work, it is assumed that the
functionally graded material is made of a mixture of ceramic and
metal constituents. The material properties of the functionally
graded lamina vary continuously and smoothly in the thickness
direction z and are functions of volume fractions of constituent
materials. Young’s modulus EðkÞðzÞ, Poisson’s ratio nðkÞðzÞ and mass
density rðkÞðzÞ of the functionally graded lamina can be expressed
as a linear combination of the volume fraction:
rðkÞðzÞ ¼ ðrðkÞC �rðkÞ
M ÞV ðkÞC ðzÞþrðkÞ
M
EðkÞðzÞ ¼ ðEðkÞC �EðkÞM ÞV ðkÞC ðzÞþEðkÞM
nðkÞðzÞ ¼ ðnðkÞC �nðkÞM ÞV ðkÞC ðzÞþnðkÞM ð23Þ
where V ðkÞC is the volume fraction of the ceramic constituent
material, while rðkÞC ,EðkÞC ,nðkÞC and rðkÞ
M ,EðkÞM ,nðkÞM represent mass den-
sity, Young’s modulus and Poisson’s ratio of the ceramic and
metal constituent materials of the kth lamina, respectively.
ϕ
s
O′
s
ϕ
θ
ˆ≡
�
� �
Fig. 4. A lamina with material and laminate co-ordinate systems.
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470450

In this paper, the ceramic volume fraction V ðkÞC ðzÞ follows two
simple four-parameter power-law distributions [51]:
FGM1ðaðkÞ=bðkÞ=cðkÞ=pðkÞÞ : VðkÞC ðzÞ ¼ 1�aðkÞ
z
hk
�zkhk
� �
þbðkÞz
hk�zkhk
� �cðkÞ !pðkÞ
FGM2ðaðkÞ=bðkÞ=cðkÞ=pðkÞÞ : VðkÞC ðzÞ ¼ 1�aðkÞ
zkþ1
hk
�z
hk
� �
þbðkÞzkþ1
hk
�z
hk
� �cðkÞ !pðkÞ
ð24Þ
where the volume fraction index pðkÞð0rpðkÞr1Þ and the para-
meters aðkÞ,bðkÞ,cðkÞ dictate the material variation profile through
the functionally graded lamina thickness.
By using the lamination scheme in combination with the two
four-parameter power-law distributions it is possible to consider
a simple composite shell constituted by two or three laminae:
for the two laminae shell each lamina is a FGM lamina with a
different power-law distribution (Fig. 5), while for the three
laminae the middle is a homogeneous isotropic elastic one and
the bottom and the top laminae are FGM laminae with different
power-law distributions (Fig. 6). Thus, using the laminated
composite material scheme a further generalization of function-
ally graded material profiles is introduced as represented in
Figs. 5 and 6. Fig. 5 represents a possible material profile through
the functionally graded shell thickness obtained with two FGM
laminae, while Fig. 6 illustrates a possible material profile
obtained considering a three laminae shell. In particular, Fig. 6(a),
(b) and (d) present a middle lamina constituted by one of the
two constituents of functionally graded material and this middle
lamina is indicated with the symbol FGMC (ceramic isotropic
material) or FGMM (metal isotropic material). Otherwise,
Fig. 6(c) shows a middle lamina constituted by a mixture of the
two constituents and then the symbol used to indicate the middle
lamina is FGMCM (isotropic material obtained by a mixture of two
constituents). For the sake of simplicity, the symbol FGMCM is
indifferently used to indicate the three cases mentioned above
(FGMC, FGMM and FGMCM), because it represents the most general
case. The possible combinations are wide and the unique atten-
tion is to design a continuum profile through the thickness in
order to avoid stress concentrations and geometric discontinu-
ities. Furthermore, symmetric and asymmetric profiles can be
considered.
Fig. 5. Variations of the ceramic volume fraction Vc through a two laminae thickness for different values of the power-law index p¼ pð1Þ ¼ pð2Þ: (a) FGM1ðað1Þ ¼ 1=bð1Þ ¼ 0=cð1Þ=pð1Þ Þ=
FGM2ðað2Þ ¼ 1=bð2Þ ¼ 0=cð2Þ=pð2Þ Þ and (b) FGM2ðað1Þ ¼ 1=bð1Þ ¼ 0=cð1Þ=pð1Þ Þ=FGM1ðað2Þ ¼ 1=bð2Þ ¼ 0=cð2Þ=pð2Þ Þ .
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470 451

Following the direct approach or the virtual work principle in
dynamic version and remembering the Gauss–Codazzi relations
for the shells of revolution (13), five equations of motion in terms
of internal actions can be written for the revolution shell element:
1
Rj
@Nj
@jþ
@Nsj
@sþðNj�NsÞ
cosj
R0þ
Tj
Rj¼ I0 €ujþ I1
€bj
1
Rj
@Njs
@jþ
@Ns
@sþðNjsþNsjÞ
cosj
R0þTs
sinj
R0¼ I0 €usþ I1
€bs
1
Rj
@Tj@j
þ@Ts@s
þTjcosj
R0�Nj
Rj�Ns
sinj
R0¼ I0 €w
1
Rj
@Mj
@jþ
@Msj
@sþðMj�MsÞ
cosj
R0�Tj ¼ I1 €ujþ I2
€bj
1
Rj
@Mjs
@jþ
@Ms
@sþðMjsþMsjÞ
cosj
R0�Ts ¼ I1 €usþ I2
€bs ð25Þ
where Ii are the mass inertias which are defined as
Ii ¼X
l
k ¼ 1
Z zkþ 1
zk
rðkÞzi 1þz
Rj
� �
1þz
RW
� �
dz, i¼ 0,1,2 ð26Þ
and rðkÞ is the mass density of the material per unit volume of the
kth ply.
The first three Eq. (25) represent translational equilibriums
along meridional j, circumferential s and normal z directions,
while the last two are rotational equilibrium equations about the
s and j directions, respectively.
The three basic sets of equations, namely kinematic (18),
constitutive (19) and motion Eq. (25) may be combined to give
the fundamental system of equations, also known as the govern-
ing system of equations. By replacing the kinematic Eq. (18) into
the constitutive Eq. (19) and the result of this substitution into
the motion Eq. (25), the complete equations of motion in terms of
displacement and rotational components can be written as
L11 L12 L13 L14 L15
L21 L22 L23 L24 L25
L31 L32 L33 L34 L35
L41 L42 L43 L44 L45
L51 L52 L53 L54 L55
2
6
6
6
6
6
6
4
3
7
7
7
7
7
7
5
uj
us
w
bj
bs
2
6
6
6
6
6
6
4
3
7
7
7
7
7
7
5
¼
I0 0 0 I1 0
0 I0 0 0 I1
0 0 I0 0 0
I1 0 0 I2 0
0 I1 0 0 I2
2
6
6
6
6
6
6
4
3
7
7
7
7
7
7
5
€uj€us
€w€bj
€bs
2
6
6
6
6
6
6
6
4
3
7
7
7
7
7
7
7
5
ð27Þ
where the explicit forms of the equilibrium operators Lij,i,j¼
1,. . .,5 are shown in the appendix.
Two kinds of boundary conditions are considered, namely the
fully clamped edge boundary condition (C) and the free edge
boundary condition (F). The equations describing the boundary
conditions can be written as follows:
Clamped edge boundary conditions (C):
uj ¼ us ¼w¼ bj ¼ bs ¼ 0 at j¼j0 and j¼j1, 0rsrs0
or at s¼ 0 and s¼ s0, j0rjrj1 ð28Þ
Fig. 6. Variations of the ceramic volume fraction Vc through a three laminae thickness for different values of the power-law index p¼ p 1ð Þ ¼ p 3ð Þ: (a) FGM1ðað1Þ ¼
1=bð1Þ ¼ 0=cð1Þ=pð1ÞÞ=FGMM=FGM2ðað3Þ ¼ 1=bð3Þ ¼ 0=cð3Þ=pð3Þ Þ , (b) FGM2ðað1Þ ¼ 1=bð1Þ ¼ 0=cð1Þ=pð1Þ Þ=FGMC=FGM1ðað3Þ ¼ 1=bð3Þ ¼ 0=cð3Þ=pð3Þ Þ , (c) FGM1ðað1Þ ¼ 1=bð1Þ ¼ 0:5=cð1Þ ¼ 2=pð1Þ Þ=FGMCM=FGM2ðað3Þ ¼
1=bð3Þ ¼ 0:5=cð3Þ ¼ 2=pð3ÞÞ and (d) FGM2ðað1Þ ¼ 1=bð1Þ ¼ 0:5=cð1Þ ¼ 2=pð1Þ Þ=FGMC=FGM1ðað3Þ ¼ 1=bð3Þ ¼ 0:5=cð3Þ ¼ 2=pð3Þ Þ .
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470452

Free edge boundary conditions (F):
Nj ¼Njs ¼ Tj ¼Mj ¼Mjs ¼ 0 at j¼j0 or j¼j1, 0rsrs0
ð29Þ
Ns ¼Nsj ¼ Ts ¼Ms ¼Msj ¼ 0 at s¼ 0 or s¼ s0, j0rjrj1
ð30Þ
where j0 ¼ j1 and j1 ¼ jN .
In addition to the external boundary conditions, the kinematic
and physical compatibility conditions should be satisfied at the
common closing meridians with s¼ 0,2pR 0, if a complete shell of
revolution (Fig. 7) want to be considered. The kinematic compat-
ibility conditions include the continuity of displacement and
rotation components. The physical compatibility conditions can
only be the five continuous conditions for the generalized stress
resultants. To consider complete revolute shells characterized
by s0 ¼ 2pR 0, it is necessary to implement the kinematic and
physical compatibility conditions between the two computational
meridians with s¼0 and with s0¼2pR0.Kinematic compatibility conditions along the closing meridian
(s¼0,2pR0)
ujðj,0,tÞ ¼ ujðj,s0,tÞ,usðj,0,tÞ ¼ usðj,s0,tÞ,wðj,0,tÞ ¼wðj,s0,tÞ,
bjðj,0,tÞ ¼ bjðj,s0,tÞ,bsðj,0,tÞ ¼ bsðj,s0,tÞ, j0rjrj1
ð31Þ
Physical compatibility conditions along the closing meridian
(s¼0.2pR0)
Nsðj,0,tÞ ¼Nsðj,s0,tÞ,Nsjðj,0,tÞ ¼Nsjðj,s0,tÞ,Tsðj,0,tÞ ¼ Tsðj,s0,tÞ,
Msðj,0,tÞ ¼Msðj,s0,tÞ,Msjðj,0,tÞ ¼Msjðj,s0,tÞ,j0rjrj1
ð32Þ
where j0 ¼ j1 and j1 ¼ jN .
3. Discretized equations and numerical implementation
Since a brief review of the GDQ method is presented in
Tornabene [51], the same approach is used in the present work
about the GDQ technique.
Throughout the paper, the Chebyshev–Gauss–Lobatto (C–G–L)
grid distribution is assumed. Since the co-ordinates of the grid
points of the reference surface in the j direction are introduced in
Eq. (10), then the co-ordinates of the grid points in the s direction
are the following:
sj ¼ 1�cosj�1
M�1p
� �� �
s02
, j¼ 1,2,. . .,M for sA 0,s0½ � ðwith srWR0Þ
ð33Þ
where M is the total number of sampling points used to discretize
the domain in s direction of the doubly curved shell (Fig. 8). It has
been proven that for the Lagrange interpolating polynomials, the
Chebyshev–Gauss–Lobatto sampling points rule guarantees con-
vergence and efficiency to the GDQ technique [59–61,63].
In the following, the free vibration of laminated composite
doubly curved shells and panels of revolution will be studied.
Using the method of variable separation, it is possible to seek
solutions that are harmonic in time and whose frequency is o.
The displacement field can be written as follows:
ujðj,s,tÞ ¼Ujðj,sÞeiot
usðj,s,tÞ ¼Usðj,sÞeiot
wðj,s,tÞ ¼Wðj,sÞeiot
bjðj,s,tÞ ¼ Bjðj,sÞeiot
bsðj,s,tÞ ¼ Bsðj,sÞeiot ð34Þ
where the vibration spatial amplitude values Uj,Us
,W ,Bj,Bs fulfill
the fundamental differential system.
The GDQ procedure enables one to write the equations of
motion in discrete form, transforming each space derivative into a
weighted sum of node values of dependent variables. Each
approximate equation is valid in a single sampling point.
Closing meridian
s = 0, 2�R0
� = �1
� = �0
Fig. 7. Common meridians of a complete revolution shell.
1
j
MN
s
s = 0s = s0
1
i
� = �0
� = �1
(�i,sj)
�
Fig. 8. C–G–L grid distribution on a revolution shell panel.
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470 453

Thus, the whole system of differential equations has been
discretized and the global assembling leads to the following set of
linear algebraic equations:
Kbb Kbd
Kdb Kdd
" #
db
dd
" #
¼o20 0
0 Mdd
" #
db
dd
" #
ð35Þ
In the above mentioned matrices and vectors, the partitioning
is set forth by subscripts b and d, referring to the system degrees
of freedom and standing for boundary and domain, respectively.
In this sense, b-equations represent the discrete boundary and
compatibility conditions, which are valid only for the points lying
on constrained edges of the shell; while d-equations are the
motion equations, assigned on interior nodes. In order to make
the computation more efficient, kinematic condensation of non-
domain degrees of freedom is performed:
ðKdd�KdbðKbbÞ�1KbdÞdd ¼o2Mdddd ð36Þ
The natural frequencies of the structure considered can be
determined by solving the standard eigenvalue problem (36). In
particular, the solution procedure by means of the GDQ technique
has been implemented in a MATLAB code. Finally, the results in
terms of frequencies are obtained using the eigs function of
MATLAB program.
With the present approach, differing from the finite element
method, no integration occurs prior to the global assembly of the
linear system, and these results in a further computational cost
saving in favor of the differential quadrature technique.
4. Numerical applications and results
In the present section, some results and considerations about the
free vibration problem of FGM and laminated composite doubly
curved shells and panels of revolution with a free-form meridian are
presented. The analysis has been carried out by means of numerical
procedures illustrated above. In order to verify the accuracy of the
present method, some comparisons have been performed.
The geometrical boundary conditions for a shell panel (Fig. 8)
are identified by the following convention. For example, symbo-
lism C–F–C–F shows that the edges j¼j0, s¼0, j¼j1, s¼s0 are
clamped, free, clamped and free, respectively. On the contrary, for
a complete shell of revolution (Fig. 7), symbolism C–F shows that
the edges j¼j0 and j¼j1 are clamped and free, respectively.
The missing boundary conditions are the kinematical and physical
compatibility conditions that are applied at the same closing
meridians for s¼0 and s0¼2pR0.Tables 1–4 present new results regarding different shells and
panels of revolution with a Bezier curve meridian. Three different
Table 1
First ten frequencies for an F–C isotropic free-form meridian shell.
Control points and weights of the Bezier curve:
x1 ¼ 2 1:2 0:85 0:75 0:7� �
, x03 ¼ 0 0:3 1 1:5 2� �
, w¼ 1 1 1 1 1� �
Geometric characteristics: W0 ¼ 3601, h¼ 0:1m, Rb ¼ 0m
Isotropic material properties: E¼ 70GPa, n¼ 0:3, r¼ 2707kg=m3
Mode
(Hz)
GDQ-RM
31� 31
GDQ-TL
31� 31
Nastran
40� 80 ð4 nodesÞ
Abaqus
40� 80 ð8 nodesÞ
Ansys
40� 80 ð8 nodesÞ
Straus
40� 80 ð8 nodesÞ
Pro/Mechanica
31� 82 ðGEMÞ
f1 99.139 99.225 98.935 98.945 99.189 99.058 98.897
f2 99.139 99.225 98.935 98.946 99.190 99.058 98.897
f3 105.351 105.478 104.854 104.800 105.160 104.890 104.768
f4 105.351 105.478 104.854 104.800 105.160 104.890 104.768
f5 132.777 133.087 131.839 131.760 132.500 129.049 131.737
f6 132.777 133.087 131.839 131.760 132.500 129.049 131.740
f7 138.515 138.009 138.549 138.950 138.710 138.673 138.586
f8 168.497 168.230 165.901 165.810 166.730 162.648 165.772
f9 168.497 168.230 165.901 165.810 166.730 162.648 165.776
f10 179.511 179.999 178.904 178.950 179.940 171.142 178.919
Table 2
First ten frequencies for a C–C–F–F isotropic free-form meridian panel.
Control points and weights of the Bezier curve:
x1 ¼ 0:8 1:3 1:5 1:4 1:2� �
, x03 ¼ 0 0:5 1 1:5 2� �
, w¼ 1 1 1 1 1� �
Geometric characteristics: W0 ¼ 1201, h¼ 0:1m, Rb ¼ 0m
Isotropic material properties: E¼ 70GPa, n¼ 0:3, r¼ 2707kg=m3
Mode
(Hz)
GDQ-RM
31� 31
GDQ-TL
31� 31
Nastran
40� 40 ð4 nodesÞ
Abaqus
40� 40 ð8 nodesÞ
Ansys
40� 40 ð8 nodesÞ
Straus
80� 80 ð4 nodesÞ
Pro/Mechanica
31� 31 ðGEMÞ
f1 73.153 73.126 72.788 72.758 72.835 74.141 72.723
f2 97.433 96.379 97.791 97.697 97.882 99.834 97.696
f3 191.855 192.944 192.277 192.050 192.250 195.644 191.837
f4 247.826 248.813 247.864 247.420 248.400 252.363 247.309
f5 368.023 367.960 370.021 368.530 370.400 379.756 368.348
f6 431.951 433.114 433.068 431.310 434.350 445.071 431.290
f7 513.792 513.631 514.925 514.060 515.080 517.257 513.753
f8 586.381 586.474 587.524 586.210 588.750 590.594 585.884
f9 614.981 615.184 616.854 615.030 617.970 622.775 614.805
f10 639.533 639.744 642.839 639.410 644.420 653.603 639.367
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470454

curves are considered and the vectors of the control points and
the weights of the Bezier curves are shown in Tables 1–4, as well
as the details regarding the material properties, the geometries of
the structures and the boundary conditions assumed. Results in
terms of first ten frequencies obtained by the GDQ method for the
Reissner–Mindlin (RM) theory and the Toorani–Lakis (TL) theory
are compared with the FEM results. Various FEM commercial
codes such as Abaqus, Ansys, Straus, Nastran and Pro/Mechanica,
have been considered and the finite element shell types selected
in each of the commercial programs are reported in the work [75].
Table 3
First ten frequencies for a C–C isotropic free-form meridian shell.
Control points and weights of the Bezier curve:
x1 ¼ 0:8 1:3 1:5 1:4 1:2� �
, x03 ¼ 0 0:5 1 1:5 2� �
, w¼ 1 1 1 1 1� �
Geometric characteristics: W0 ¼ 3601, h¼ 0:1m, Rb ¼ 0m
Isotropic material properties: E¼ 70GPa, n¼ 0:3, r¼ 2707kg=m3
Mode
(Hz)
GDQ-RM
31� 31
GDQ-TL
31� 31
Nastran
40� 80 ð4 nodesÞ
Abaqus
40� 80 ð8 nodesÞ
Ansys
40� 80 ð8 nodesÞ
Straus
40� 80 ð8 nodesÞ
Pro/Mechanica
31� 82 ðGEMÞ
f1 519.359 519.086 519.153 519.940 519.270 518.585 519.023
f2 519.359 519.086 519.153 519.940 519.270 518.585 519.023
f3 529.774 529.619 529.020 529.830 530.260 528.797 529.317
f4 529.774 529.619 529.020 529.830 530.260 528.797 529.317
f5 541.254 541.055 541.457 541.720 541.290 540.946 541.250
f6 541.254 541.055 541.457 542.860 541.290 540.946 541.250
f7 542.013 542.136 542.463 542.860 542.870 541.568 541.723
f8 566.323 566.326 564.919 566.100 567.810 565.385 565.813
f9 566.323 566.326 564.919 566.100 567.820 565.385 565.813
f10 573.588 573.581 574.310 573.330 574.500 571.722 573.240
Table 4
First ten frequencies for a C–F–C–F isotropic free-form meridian panel.
Control points and weights of the Bezier curve:
x1 ¼ 0:8 1:3 1:5 1:3 0:8� �
, x03 ¼ 0 0:5 1 1:5 2� �
, w¼ 1 1 1 1 1� �
Geometric characteristics: W0 ¼ 1201, h¼ 0:1m, Rb ¼ 0m
Isotropic material properties: E¼ 70 GPa, n¼ 0:3, r¼ 2707kg=m3
Mode
(Hz)
GDQ-RM
31� 31
GDQ-TL
31� 31
Nastran
40� 40 ð4 nodesÞ
Abaqus
40� 40 ð8 nodesÞ
Ansys
40� 40 ð8 nodesÞ
Straus
80� 80 ð4 nodesÞ
Pro/Mechanica
31� 31 ðGEMÞ
f1 283.760 283.663 284.463 283.700 284.260 292.725 283.530
f2 305.347 304.997 306.221 305.380 305.740 314.441 305.077
f3 381.392 382.013 382.430 382.810 382.380 386.420 381.915
f4 433.450 433.467 434.280 433.540 433.990 440.007 433.521
f5 545.180 544.274 546.814 546.800 546.260 552.977 545.214
f6 584.842 584.182 587.950 585.610 587.570 596.844 584.929
f7 590.816 590.491 592.238 590.500 592.600 602.185 590.381
f8 599.965 599.921 602.194 600.320 602.210 617.486 599.881
f9 628.708 628.704 629.123 628.810 629.940 635.533 628.202
f10 691.218 691.245 691.714 690.820 694.580 696.560 690.489
1°-2° Mode Shapes 3°-4° Mode Shapes 5°-6° Mode Shapes
7° Mode Shape 8°-9° Mode Shapes 10°-11° Mode Shapes
Fig. 9. Mode shapes for the F–C free-form meridian shell of Table 1.
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470 455
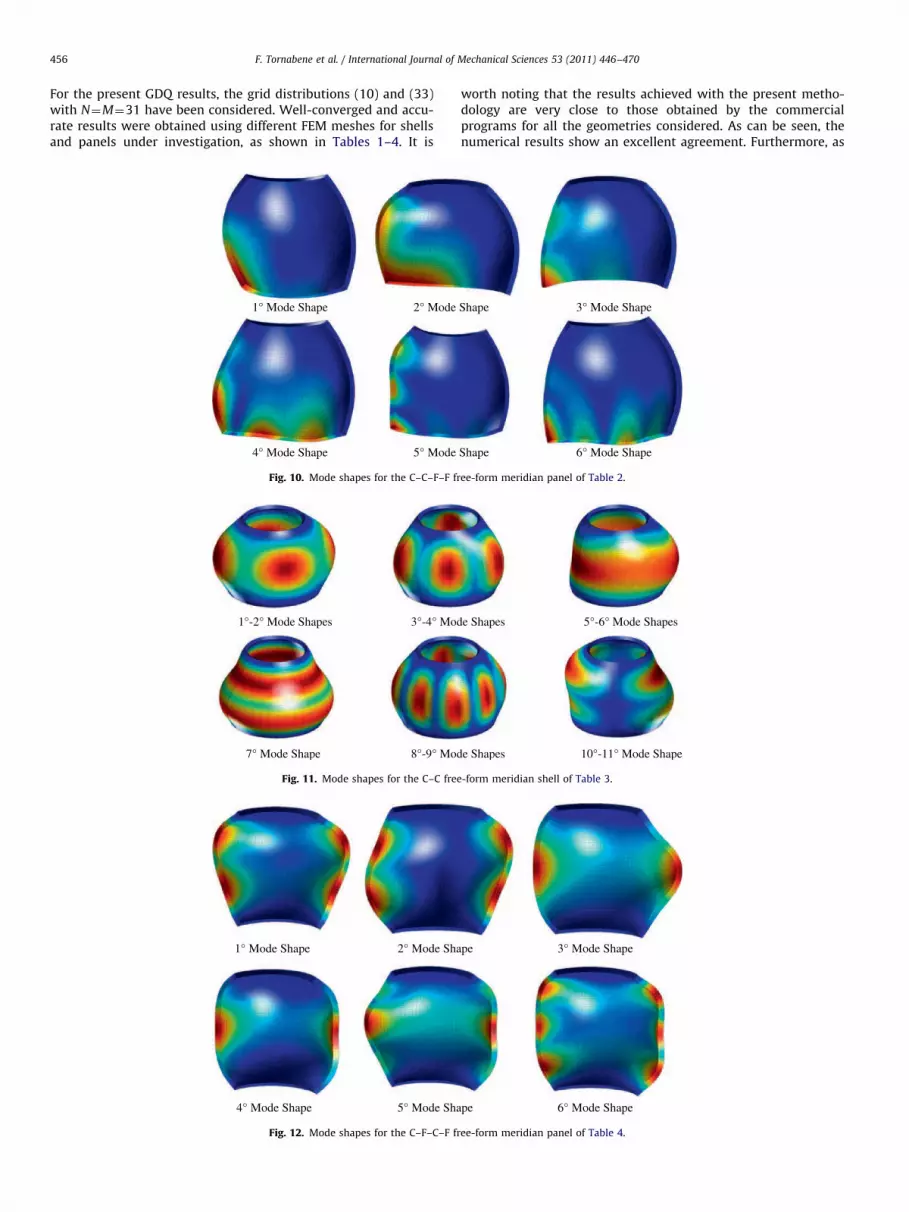
For the present GDQ results, the grid distributions (10) and (33)
with N¼M¼31 have been considered. Well-converged and accu-
rate results were obtained using different FEM meshes for shells
and panels under investigation, as shown in Tables 1–4. It is
worth noting that the results achieved with the present metho-
dology are very close to those obtained by the commercial
programs for all the geometries considered. As can be seen, the
numerical results show an excellent agreement. Furthermore, as
1° Mode Shape 2° Mode Shape 3° Mode Shape
4° Mode Shape 5° Mode Shape 6° Mode Shape
Fig. 10. Mode shapes for the C–C–F–F free-form meridian panel of Table 2.
1°-2° Mode Shapes 3°-4° Mode Shapes 5°-6° Mode Shapes
7° Mode Shape 8°-9° Mode Shapes 10°-11° Mode Shape
Fig. 11. Mode shapes for the C–C free-form meridian shell of Table 3.
1° Mode Shape 2° Mode Shape 3° Mode Shape
4° Mode Shape 5° Mode Shape 6° Mode Shape
Fig. 12. Mode shapes for the C–F–C–F free-form meridian panel of Table 4.
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470456

regarding the influence of the initial curvature, the difference
between the RMT and TLT results is low for all the laminated
composite doubly curved structures considered.
In Figs. 9–12, there are reported the first six mode shapes for
the structures with a free-form meridian considered above. In
particular, for the complete shells of revolution there are some
symmetrical mode shapes due to the symmetry of the problem
considered in 3D space. In these cases, the symmetrical mode
shapes are summarized in one figure. The mode shapes of all the
structures under discussion have been evaluated by authors.
By using the authors’ MATLAB code, these mode shapes have
been reconstructed in three-dimensional view by means of
considering the displacement field (17) after solving the eigenva-
lue problem (36).
Finally, in order to illustrate the GDQ convergence character-
istic for free-form meridian shells, the first ten frequencies of the
C–C–F–F isotropic free-form meridian panel of Table 2 are
investigated by varying the number of grid points. Results are
collected in Table 5 when the number of points of the Chebyshev–
Gauss–Lobatto grid distributions (10) and (33) is increased from
N¼M¼11 up to N¼M¼31. It can be seen that the proposed GDQ
formulation well captures the dynamic behavior of the panel by
using only 21 points in two co-ordinate directions. It can also be
seen that for the considered structure, the formulation is stable
while increasing the number of points and that the use of 21
points guarantees convergence of the procedure. Analogous and
similar convergence results can be obtained for all the shell
structures considered in this work, as shown in the Ph.D. Thesis
Table 5
First ten frequencies for the C–C–F–F isotropic free-form meridian panel of Table 2 for an increasing the number of grid points N¼M of the Chebyshev–Gauss–Lobatto
distribution.
Mode (Hz) N¼M¼11 N¼M¼15 N¼M¼17 N¼M¼21 N¼M¼25 N¼M¼29 N¼M¼31
GDQ-RM
f1 72.115 73.153 73.268 73.257 73.195 73.161 73.153
f2 95.815 96.800 97.173 97.414 97.439 97.435 97.433
f3 190.226 191.894 192.067 192.044 191.936 191.872 191.855
f4 242.855 247.103 247.722 247.979 247.909 247.845 247.826
f5 363.562 367.505 367.959 368.162 368.101 368.041 368.023
f6 424.634 431.237 432.047 432.278 432.107 431.984 431.951
f7 513.585 513.879 513.863 513.831 513.808 513.795 513.792
f8 584.260 586.074 586.372 586.479 586.430 586.392 586.381
f9 613.416 614.395 614.865 615.082 615.040 614.994 614.981
f10 640.392 638.604 639.249 639.608 639.593 639.548 639.533
GDQ-TL
f1 72.159 73.024 73.189 73.219 73.166 73.134 73.126
f2 94.487 95.761 96.126 96.360 96.383 96.380 96.379
f3 191.230 192.935 193.123 193.118 193.019 192.959 192.944
f4 243.644 248.007 248.652 248.941 248.888 248.830 248.813
f5 363.399 367.406 367.879 368.096 368.038 367.979 367.960
f6 425.686 432.336 433.160 433.417 433.261 433.146 433.114
f7 513.462 513.725 513.705 513.670 513.647 513.634 513.631
f8 584.391 586.173 586.463 586.567 586.521 586.484 586.474
f9 613.633 614.584 615.054 615.277 615.239 615.196 615.184
f10 640.595 638.810 639.454 639.815 639.803 639.759 639.744
Table 6
The first ten frequencies for the functionally graded free-form panel C–C–F–F of Table 2 (W0 ¼ 1201,h¼ 0:1m,Rb ¼ 0m) as a function of the power-law exponent
p¼ pð1Þ ¼ pð2Þ .
Mode (Hz) p¼0 p¼0.6 p¼1 p¼5 p¼20 p¼50 p¼100 p¼N
FGM1ðað1Þ ¼ 1=bð1Þ ¼ 0=cð1Þ ¼ 2=pð1Þ Þ=FGM2ðað2Þ ¼ 1=bð2Þ ¼ 0=cð2Þ ¼ 2=pð2Þ Þ power-law distribution
f1 78.170 80.625 81.175 79.788 76.097 74.553 73.922 73.219
f2 102.874 106.716 107.612 105.867 100.564 98.313 97.390 96.360
f3 206.175 210.527 211.298 207.298 199.298 195.990 194.634 193.118
f4 265.772 274.032 275.943 271.270 258.639 253.414 251.294 248.941
f5 392.983 406.716 409.887 403.116 383.520 375.249 371.867 368.096
f6 462.720 478.622 482.109 473.969 451.479 441.841 437.870 433.417
f7 548.399 547.996 546.791 534.664 521.855 517.341 515.583 513.670
f8 626.224 628.740 628.129 614.624 597.995 591.776 589.299 586.567
f9 656.875 659.473 658.396 643.927 627.483 621.015 618.332 615.277
f10 683.073 694.777 695.201 680.729 659.323 649.478 645.050 639.815
FGM2ðað1Þ ¼ 1=bð1Þ ¼ 0=cð1Þ ¼ 2=pð1Þ Þ=FGM1ðað2Þ ¼ 1=bð2Þ ¼ 0=cð2Þ ¼ 2=pð2Þ Þ power-law distribution
f1 78.170 72.837 71.322 70.552 72.263 72.814 73.013 73.219
f2 102.874 95.087 92.905 92.097 94.843 95.717 96.033 96.360
f3 206.175 194.203 190.616 188.126 191.367 192.383 192.746 193.118
f4 265.772 248.215 243.279 240.431 245.825 247.611 248.263 248.941
f5 392.983 364.631 356.697 353.166 362.729 365.816 366.935 368.096
f6 462.720 428.617 418.929 415.129 426.977 430.697 432.035 433.417
f7 548.399 532.703 527.277 516.181 514.287 513.928 513.802 513.670
f8 626.224 603.357 595.289 584.574 585.848 586.277 586.423 586.567
f9 656.875 627.086 615.850 607.459 613.555 614.659 614.982 615.277
f10 683.073 640.379 629.167 620.314 632.713 636.920 638.373 639.815
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470 457

by Tornabene [59]. In addition, Hosseini-Hashemi et al. [80] (see
Table 3 of the work [80]) have compared their results obtained
with a semi analytical method with those results presented in the
article by Tornabene [51]. Since the code used to obtained the
previous results [51] is exactly the same of the code used to
obtained all the results presented in this paper, the results of the
work [80] represent another proof of the validity and the accuracy
of the present procedure. As shown, the exact results by Hosseini-
Hashemi et al. [80] are in good agreement with those reported by
Tornabene [51]. The discrepancy between results obtained from
two methods is closely zero.
Regarding the functionally graded materials, their two consti-
tuents are taken to be zirconia (ceramic) and aluminum (metal).
Young’s modulus, Poisson’s ratio and mass density for the zirconia
are EC ¼ 168GPa, nC ¼ 0:3, rC ¼ 5700kg=m3, and for the aluminum
are EM ¼ 70GPa, nM ¼ 0:3 and rM ¼ 2707kg=m3, respectively.
Tables 6–10 illustrate the first ten frequencies of different
structures with a free-form meridian. These tables show how by
varying only the power-law index p of the volume fraction Vc it is
possible to modify natural frequencies of FGM shells and panels.
For the GDQ results shown in Tables 6–10, the grid distributions
(10) and (33) with N¼M¼21 are considered. Furthermore, two
and three layered shells and panels of revolution with a free-form
meridian have been considered in order to illustrate the influence
of the volume fraction profiles shown in Figs. 5 and 6.
The influence of the index p on the vibration frequencies is
shown in Figs. 13–17. As can be seen from figures, natural
frequencies of FGM shells and panels often present an
Table 7
The first ten frequencies for the functionally graded free-form panel C–F–C–F of Table 4 (W0 ¼ 1201,h¼ 0:1m,Rb ¼ 0m) as a function of the power-law exponent
p¼ pð1Þ ¼ pð3Þ .
Mode (Hz) p¼0 p¼0.6 p¼1 p¼5 p¼20 p¼50 p¼100 p¼N
FGM1ðað1Þ ¼ 1=bð1Þ ¼ 0:5=cð1Þ ¼ 2=pð1Þ Þ=FGMCM=FGM2ðað3Þ ¼ 1=bð3Þ ¼ 0:5=cð3Þ ¼ 2=pð3Þ Þ power-law distribution
f1 302.868 307.559 309.470 305.694 291.768 287.199 285.495 283.688
f2 325.703 330.387 332.275 327.992 313.459 308.716 306.949 305.077
f3 407.901 405.629 403.909 392.648 385.643 383.621 382.868 382.069
f4 462.809 461.597 460.236 448.207 438.728 435.796 434.687 433.500
f5 581.145 580.178 578.430 562.962 551.418 547.538 546.013 544.342
f6 623.734 628.692 628.242 613.132 596.918 589.809 587.111 584.234
f7 630.423 629.451 629.878 617.256 598.165 593.781 592.179 590.500
f8 640.571 644.045 645.538 634.560 611.530 604.822 602.445 600.005
f9 671.233 667.691 665.740 649.782 634.687 631.145 629.941 628.725
f10 738.008 734.648 732.131 712.890 698.359 694.292 692.815 691.271
FGM2ðað1Þ ¼ 1=bð1Þ ¼ 0:5=cð1Þ ¼ 2=pð1Þ Þ=FGMCM=FGM1ðað3Þ ¼ 1=bð3Þ ¼ 0:5=cð3Þ ¼ 2=pð3Þ Þ power-law distribution
f1 302.868 299.911 297.810 285.463 283.171 283.403 283.533 283.688
f2 325.703 322.504 320.248 307.110 304.601 304.807 304.929 305.077
f3 407.901 403.481 400.733 387.234 383.158 382.496 382.281 382.069
f4 462.809 457.870 454.738 438.856 434.415 433.841 433.666 433.500
f5 581.145 574.996 571.054 550.668 545.248 544.665 544.498 544.342
f6 623.734 617.419 613.134 589.295 584.077 584.060 584.129 584.234
f7 630.423 623.709 619.440 597.779 591.722 590.947 590.716 590.500
f8 640.571 633.938 629.565 606.311 600.524 600.121 600.047 600.005
f9 671.233 663.927 659.411 637.531 630.695 629.498 629.109 628.725
f10 738.008 730.034 725.059 700.509 693.163 692.003 691.633 691.271
Table 8
The first ten frequencies for the functionally graded free-form panel F–F–C–C of Table 1 (W0 ¼ 1201,h¼ 0:1m,Rb ¼ 0m) as a function of the power-law exponent
p¼ p 1ð Þ ¼ p 3ð Þ .
Mode (Hz) p¼0 p¼0.6 p¼1 p¼5 p¼20 p¼50 p¼100 p¼N
FGM1ðað1Þ ¼ 0=bð1Þ ¼ �0:6=cð1Þ ¼ 2=pð1Þ Þ=FGMCM=FGM2ðað3Þ ¼ 0=bð3Þ ¼ �0:6=cð3Þ ¼ 2=pð3Þ Þ power-law distribution
f1 30.556 31.221 31.528 32.081 31.298 30.645 30.195 28.621
f2 83.906 85.692 86.526 88.056 85.897 84.100 82.867 78.593
f3 177.390 180.959 182.592 185.345 180.972 177.363 174.874 166.157
f4 204.823 206.327 206.993 207.267 203.188 200.211 198.257 191.853
f5 236.942 239.330 240.373 241.234 236.349 232.679 230.226 221.938
f6 290.465 296.946 300.060 306.200 298.412 291.859 287.377 272.072
f7 339.938 346.555 349.629 354.979 346.553 339.617 334.862 318.413
f8 363.542 371.615 375.425 382.635 373.089 365.072 359.563 340.522
f9 414.743 426.401 431.999 443.683 431.567 421.025 413.737 388.482
f10 465.840 472.783 475.884 479.955 469.614 461.411 455.802 436.342
FGM2ðað1Þ ¼ 0=bð1Þ ¼ �0:6=cð1Þ ¼ 2=pð1Þ Þ=FGMCM=FGM1ðað3Þ ¼ 0=bð3Þ ¼ �0:6=cð3Þ ¼ 2=pð3Þ Þ power-law distribution
f1 30.556 30.591 30.547 29.592 28.753 28.594 28.561 28.621
f2 83.906 83.985 83.861 81.256 78.981 78.543 78.447 78.592
f3 177.390 177.501 177.218 171.776 167.051 166.121 165.907 166.156
f4 204.823 204.112 203.499 198.161 194.082 192.963 192.526 191.852
f5 236.942 236.336 235.699 229.283 224.193 222.911 222.457 221.937
f6 290.465 290.811 290.412 281.305 273.357 271.839 271.514 272.070
f7 339.938 340.064 339.495 329.158 320.262 318.475 318.042 318.410
f8 363.542 363.981 363.479 352.077 342.086 340.190 339.792 340.520
f9 414.743 416.000 415.692 401.826 389.229 387.103 386.812 388.478
f10 465.840 465.366 464.359 450.934 439.750 437.268 436.540 436.340
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470458

intermediate value between the natural frequencies of the limit
cases of homogeneous shells of zirconia (p¼0) and of aluminum
(p¼N), as expected. However, natural frequencies sometimes
exceed limit cases, as can be seen from Figs. 13–17. This fact can
depend on various parameters, such as the geometry of the shell,
the boundary conditions, the power-law distribution profile, the
lamination scheme, etc. In particular, for specific values of the
four parameters a, b, c, p it is possible to exceed or approach the
ceramic limit case as shown in figures under consideration, even
if the contents of ceramic is not much. Increasing the values of the
parameter index p up to infinity reduces the contents of ceramic
and at the same time increases the percentage of metal. Thus, it is
possible to obtain dynamic characteristics similar or better than
the isotropic ceramic or metal limit case by choosing suitable
values of the four parameters a, b, c and p.
Figs. 13–17 are divided into two parts. On the left, part
(a) shows the first four frequencies versus the power-law
index p obtained using FGM1ðað1Þ=bð1Þ=cð1Þ=pð1ÞÞ=FGM2ðað2Þ=bð2Þ=cð2Þ=pð2ÞÞ
or FGM1ðað1Þ=bð1Þ=cð1Þ=pð1ÞÞ=FGMCM=FGM2ðað3Þ=bð3Þ=cð3Þ=pð3ÞÞ distributions,
while on the right, part (b) illustrates the first four frequencies
versus the power-law index p obtained using FGM2ðað1Þ=bð1Þ=cð1Þ=pð1ÞÞ=
FGM1ðað2Þ=bð2Þ=cð2Þ=pð2ÞÞ or FGM2ðað1Þ=bð1Þ=cð1Þ=pð1ÞÞ=FGMCM=FGM1ðað3Þ=bð3Þ=cð3Þ=pð3ÞÞ
distributions. The symbol FGMCM indicates that the middle ply can
be constituted by a mixture of the two constituents. If one of the
two constituents has a zero volume fraction, the isotropic mate-
rial lamina is inferred as a special case.
Fig. 13 shows the first four natural frequencies of the C–C–F–F
free-form meridian panel of Table 2 versus the power-law
index p for various values of the parameter bð1Þ ¼ bð2Þ.
Fig. 13(a) illustrates the variation of the first four frequencies
Table 9
The first ten frequencies for the functionally graded free-form panel F–C–F–C of Table 1 (W0 ¼ 1201, h¼ 0:1m, Rb ¼ 0m) as a function of the power-law exponent
p¼ p 1ð Þ ¼ p 3ð Þ .
Mode (Hz) p¼0 p¼0.6 p¼1 p¼5 p¼20 p¼50 p¼100 p¼N
FGM1ðað1Þ ¼ 0:6=bð1Þ ¼ 0:2=cð1Þ ¼ 3=pð1Þ Þ=FGMCM=FGM2ðað3Þ ¼ 0:6=bð3Þ ¼ 0:2=cð3Þ ¼ 3=pð3Þ Þ power-law distribution
f1 187.034 187.543 187.765 186.610 180.220 177.472 176.384 175.190
f2 214.487 214.466 214.343 211.251 205.258 202.901 201.955 200.904
f3 292.151 293.868 294.753 295.212 283.554 278.161 276.014 273.650
f4 350.950 353.713 355.147 356.987 342.061 334.858 331.952 328.725
f5 401.696 405.932 408.205 409.350 393.923 384.379 380.528 376.257
f6 411.864 412.758 413.060 413.015 396.200 390.576 388.307 385.782
f7 541.686 546.512 549.048 553.217 529.209 517.430 512.669 507.382
f8 551.139 556.695 559.563 564.397 539.605 527.113 521.987 516.237
f9 564.376 569.841 572.827 579.202 552.615 539.559 534.357 528.635
f10 635.461 637.301 638.006 633.023 612.223 603.089 599.374 595.218
FGM2ðað1Þ ¼ 0:6=bð1Þ ¼ 0:2=cð1Þ ¼ 3=pð1Þ Þ=FGMCM=FGM1ðað3Þ ¼ 0:6=bð3Þ ¼ 0:2=cð3Þ ¼ 3=pð3Þ Þ power-law distribution
f1 187.034 185.790 184.967 178.873 175.471 175.234 175.200 175.190
f2 214.487 213.063 212.130 205.370 201.513 201.101 200.995 200.904
f3 292.151 290.205 288.903 279.008 273.619 273.482 273.539 273.650
f4 350.950 348.609 347.030 334.833 328.298 328.330 328.489 328.725
f5 401.696 399.013 397.187 382.794 375.227 375.530 375.840 376.257
f6 411.864 409.126 407.316 393.950 386.466 385.916 385.826 385.782
f7 541.686 538.067 535.619 516.557 506.430 506.624 506.939 507.382
f8 551.139 547.458 544.955 525.242 514.861 515.267 515.681 516.237
f9 564.376 560.608 558.053 538.079 527.501 527.766 528.129 528.635
f10 635.461 631.233 628.432 607.598 596.008 595.294 595.217 595.218
Table 10
The first ten frequencies for the functionally graded free-form panel C–C of Table 4 (W0 ¼ 3601, h¼ 0:1m, Rb ¼ 0m) as a function of the power-law exponent p¼ p 1ð Þ ¼ p 3ð Þ .
Mode (Hz) p¼0 p¼0.6 p¼1 p¼5 p¼20 p¼50 p¼100 p¼N
FGM1ðað1Þ ¼ 1=bð1Þ ¼ 1=cð1Þ ¼ 5=pð1Þ Þ=FGMCM=FGM2ðað3Þ ¼ 1=bð3Þ ¼ 1=cð3Þ ¼ 5=pð3Þ Þ power
f1 503.738 500.481 498.581 488.224 481.544 479.638 478.934 478.192
f2 522.847 520.680 519.456 513.492 510.620 509.947 509.712 509.470
f3 563.237 559.685 557.616 546.405 539.265 537.243 536.499 535.714
f4 563.237 559.685 557.616 546.405 539.265 537.243 536.499 535.714
f5 577.530 575.052 573.649 566.738 563.297 562.469 562.176 561.875
f6 577.530 575.052 573.649 566.738 563.297 562.469 562.176 561.875
f7 633.303 630.408 628.758 620.451 616.022 614.893 614.488 614.066
f8 633.303 630.408 628.758 620.451 616.022 614.893 614.488 614.066
f9 660.211 655.809 653.238 639.171 630.030 627.416 626.451 625.433
f10 660.211 655.809 653.238 639.171 630.030 627.416 626.451 625.433
FGM2ðað1Þ ¼ 1=bð1Þ ¼ 1=cð1Þ ¼ 5=pð1Þ Þ=FGMCM=FGM1ðað3Þ ¼ 1=bð3Þ ¼ 1=cð3Þ ¼ 5=pð3Þ Þ power-law distribution
f1 503.738 499.180 496.620 484.618 479.784 478.829 478.510 478.192
f2 522.847 520.696 519.479 513.531 510.639 509.956 509.716 509.470
f3 563.237 558.333 555.580 542.679 537.453 536.411 536.063 535.714
f4 563.237 558.333 555.580 542.679 537.453 536.411 536.063 535.714
f5 577.530 574.976 573.534 566.530 563.197 562.422 562.152 561.875
f6 577.530 574.976 573.534 566.530 563.197 562.422 562.152 561.875
f7 633.303 630.121 628.323 619.614 615.599 614.697 614.384 614.066
f8 633.303 630.121 628.323 619.614 615.599 614.697 614.384 614.066
f9 660.211 653.958 650.452 634.085 627.561 626.283 625.858 625.433
f10 660.211 653.958 650.452 634.085 627.561 626.283 625.858 625.433
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470 459

obtained using the FGM1ðað1Þ=bð1Þ=cð1Þ=pð1ÞÞ=FGM2ðað2Þ=bð2Þ=cð2Þ=pð2ÞÞ distribu-
tion, while in Fig. 13(b) the first four frequencies for the
FGM2ðað1Þ=bð1Þ=cð1Þ=pð1ÞÞ= FGM1ðað2Þ=bð2Þ=cð2Þ=pð2ÞÞ distribution are reported.
For (a, b) the same parameters að1Þ ¼ að2Þ ¼ 1,cð1Þ ¼ cð2Þ ¼ 2 are kept.
It is interesting to note that frequencies attain the value for a shell
made only of metal, due to the fact that aluminum has a much
smaller Young’s modulus than zirconia. In particular, it can be
noted that in Fig. 13(a) for low values of the parameter b the most
of frequencies exceeds the ceramic limit case (p¼0) varying the
power-law index from p¼0 to pE1, while for values of p greater
than unity frequencies decrease until a minimum value. After
the maximum, frequencies slowly decrease by increasing the
Fig. 13. First four frequencies of the functionally graded C–C–F–F free-form meridian panel of Table 2 (W0 ¼ 1201, h¼ 0:1m, Rb ¼ 0m) versus the power-law exponent
p¼ p 1ð Þ ¼ p 2ð Þ for various values of the parameter b¼ b 1ð Þ ¼ b 2ð Þ: (a) FGM1ðað1Þ ¼ 1=0rbð1Þr1=cð1Þ ¼ 2=pð1Þ Þ=FGM2ðað2Þ ¼ 1=0rbð2Þr1=cð2Þ ¼ 2=pð2Þ Þ and (b) FGM2ðað1Þ ¼ 1=0rbð1Þr1=cð1Þ ¼ 2=pð1Þ Þ=
FGM1ðað2Þ ¼ 1=0rbð2Þr1=cð2Þ ¼ 2=pð2Þ Þ .
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470460
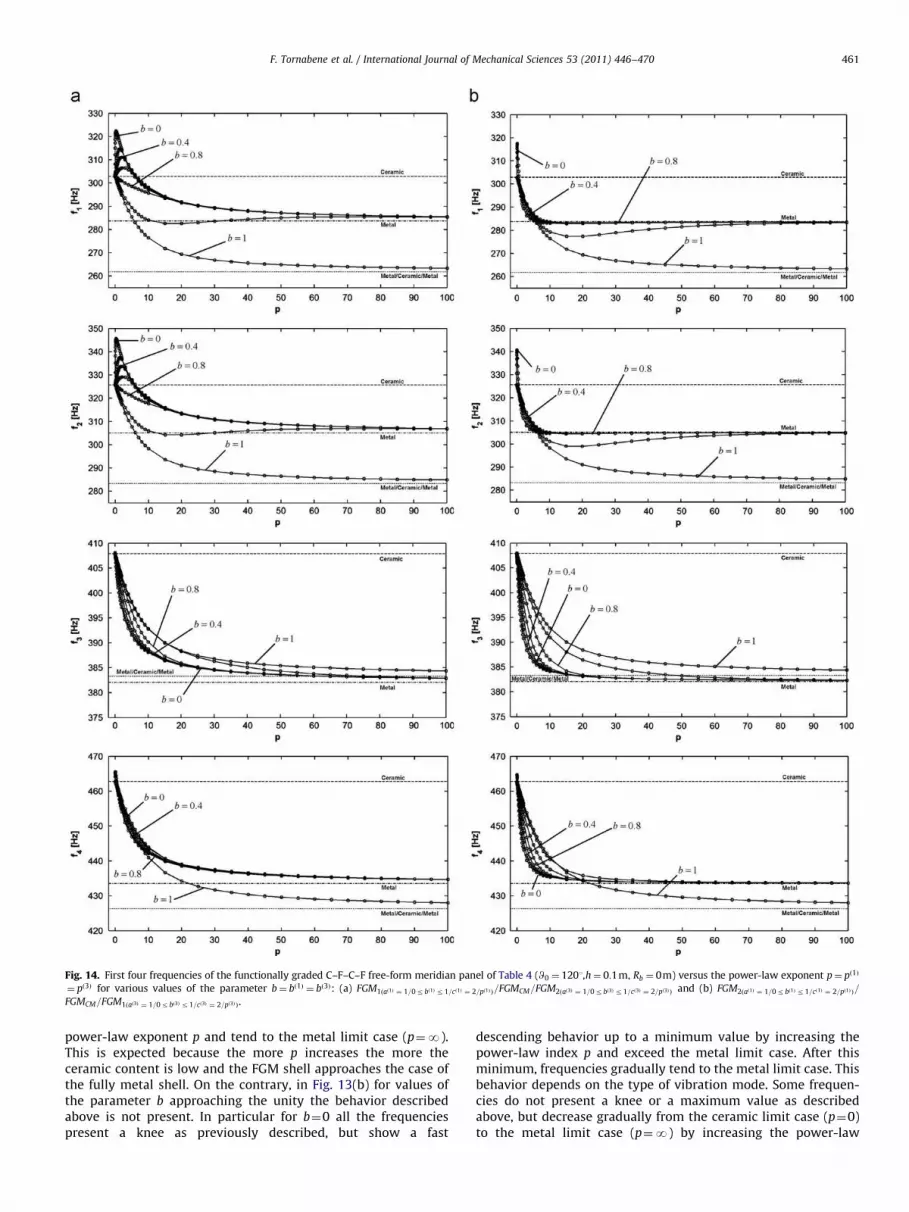
power-law exponent p and tend to the metal limit case (p¼N).
This is expected because the more p increases the more the
ceramic content is low and the FGM shell approaches the case of
the fully metal shell. On the contrary, in Fig. 13(b) for values of
the parameter b approaching the unity the behavior described
above is not present. In particular for b¼0 all the frequencies
present a knee as previously described, but show a fast
descending behavior up to a minimum value by increasing the
power-law index p and exceed the metal limit case. After this
minimum, frequencies gradually tend to the metal limit case. This
behavior depends on the type of vibration mode. Some frequen-
cies do not present a knee or a maximum value as described
above, but decrease gradually from the ceramic limit case (p¼0)
to the metal limit case (p¼N) by increasing the power-law
Fig. 14. First four frequencies of the functionally graded C–F–C–F free-form meridian panel of Table 4 (W0 ¼ 1201,h¼ 0:1m, Rb ¼ 0m) versus the power-law exponent p¼ p 1ð Þ
¼ p 3ð Þ for various values of the parameter b¼ bð1Þ ¼ bð3Þ: (a) FGM1ðað1Þ ¼ 1=0rbð1Þr1=cð1Þ ¼ 2=pð1Þ Þ=FGMCM=FGM2ðað3Þ ¼ 1=0rbð3Þr1=cð3Þ ¼ 2=pð3Þ Þ and (b) FGM2ðað1Þ ¼ 1=0rbð1Þr1=cð1Þ ¼ 2=pð1Þ Þ=
FGMCM=FGM1ðað3Þ ¼ 1=0rbð3Þr1=cð3Þ ¼ 2=pð3Þ Þ .
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470 461

exponent p. In particular, the types of vibration mode that can
present this monotone gradually decrease of frequency are tor-
sional, bending and axisymmetric mode shapes, while the cir-
cumferential and radial mode shapes are characterized by a knee
or a maximum value, as can be seen by comparing the mode
shapes represented with variations of frequencies as functions of
the power-law exponent p. However, this behavior depends on
the geometry of the shell and boundary conditions.
In the same way, Fig. 14 shows the first four natural frequen-
cies of the C–F–C–F free-form meridian panel of Table 3 versus
the power-law index p for various values of the para-
meter bð1Þ ¼ bð3Þ. Fig. 14(a) illustrates the variation of the first
Fig. 15. First four frequencies of the functionally graded F–F–C–C free-form meridian shell of Table 1 (W0 ¼ 1201, h¼ 0:1m, Rb ¼ 0m) versus the power-law exponent p¼ p 1ð Þ
¼ p 3ð Þ for various values of the parameter b¼ bð1Þ ¼ bð3Þ: (a) FGM1ðað1Þ ¼ 0=�1rbð1Þr0=cð1Þ ¼ 2=pð1Þ Þ=FGMCM=FGM2ðað3Þ ¼ 0=�1rbð3Þr0=cð3Þ ¼ 2=pð3Þ Þ and (b) FGM2ðað1Þ ¼ 0=�1rbð1Þr0=cð1Þ ¼ 2=pð1Þ Þ=
FGMCM=FGM1ðað3Þ ¼ 0=�1rbð3Þr0=cð3Þ ¼ 2=pð3Þ Þ .
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470462

four frequencies obtained using the FGM1ðað1Þ=bð1Þ=cð1Þ=pð1ÞÞ=FGMCM=
FGM2ðað3Þ=bð3Þ=cð3Þ=pð3ÞÞ distribution, while in Fig. 14(b) the first four
frequencies for the FGM2ðað1Þ=bð1Þ=cð1Þ=pð1ÞÞ=FGMCM=FGM1ðað3Þ=bð3Þ=cð3Þ=pð3ÞÞ
distribution are reported. For (a, b) the same parameters
að1Þ ¼ að3Þ ¼ 1,cð1Þ ¼ cð3Þ ¼ 2 are kept. Differently from the previous
case a new limit has been introduced. This new limit represents
the laminated shell made of three laminae: the first and the third
laminae are fully metal plies, while the middle lamina is a fully
ceramic ply. As can be seen, by varying parameters b and p
frequencies tend to different limit behaviors: ceramic, metal and
metal/ceramic/metal limit cases. b¼ b 1ð Þ ¼ b 3ð Þ is contained in the
interval [0,1] for this case.
Fig. 16. First four frequencies of the functionally graded F–C–F–C free-form meridian panel of Table 1 (W0 ¼ 1201, h¼ 0:1m, Rb ¼ 0m) versus the power-law
exponent p¼ p 1ð Þ ¼ p 3ð Þ for various values of the parameter a¼ að1Þ ¼ að3Þ: (a) FGM1ð0:2rað1Þr1:2=bð1Þ ¼ 0:2=cð1Þ ¼ 3=pð1Þ Þ=FGMCM=FGM2ð0:2rað3Þr1:2=bð3Þ ¼ 0:2=cð3Þ ¼ 3=pð3Þ Þand
(b) FGM2ð0:2rað1Þr1:2=bð1Þ ¼ 0:2=cð1Þ ¼ 3=pð1Þ Þ=FGMCM=FGM1ð0:2rað3Þr1:2=bð3Þ ¼ 0:2=cð3Þ ¼ 3=pð3Þ Þ .
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470 463

Fig. 15 presents the first four natural frequencies of the F–F–C–
C free-form meridian shell of Table 1 versus the power-law index
p for various values of the parameter bð1Þ ¼ bð3Þ. As for a previous
case a three laminae shell is considered. For (a, b) the same
parameters að1Þ ¼ að3Þ ¼ 0,cð1Þ ¼ cð3Þ ¼ 2 are kept, while
b¼ bð1Þ ¼ bð3Þ is contained in the interval [�1,0]. As can be seen,
in Fig. 15(a) frequencies exceed the ceramic limit case for low
values of the power-law index p up to a maximum value and after
this maximum decrease by increasing the power-law index p. For
high value of the power-law index p frequencies slowly tend to the
metal limit case. On the contrary, different behavior can be seen in
Fig. 15(b) due to the change of the lamination scheme profile.
Fig. 17. First four frequencies of the functionally graded C–C free-form meridian shell of Table 4 (W0 ¼ 3601, h¼ 0:1m, R b ¼ 0m) versus the power-law
exponent p¼ p 1ð Þ ¼ p 3ð Þ for various values of the parameter c¼ cð1Þ ¼ cð3Þ: (a) FGM1ðað1Þ ¼ 1=bð1Þ ¼ 1=1r cð1Þr13=pð1Þ Þ=FGMCM=FGM2ðað3Þ ¼ 1=bð3Þ ¼ 1=1rcð3Þr13=pð3Þ Þ and
(b) FGM2ðað1Þ ¼ 1=bð1Þ ¼ 1=1r cð1Þr13=pð1Þ Þ=FGMCM=FGM1ðað3Þ ¼ 1=bð3Þ ¼ 1=1r cð3Þr13=pð3Þ Þ .
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470464

Moreover, the influence of the parameter a on the dynamic
vibration of the F–C–F–C free-form meridian panel of Table 1 is
investigated in Fig. 16 by considering bð1Þ ¼ bð3Þ ¼ 0:2,cð1Þ ¼ cð3Þ ¼ 3.
In this case the parameter a¼ að1Þ ¼ að3Þ varies from 0.2 to 1.2. As
can be seen, by varying parameters a and p frequencies tend to
different limit behaviors: ceramic, metal and metal/ceramic/
metal limit cases. Finally, Fig. 17 the influence of the parameter
c on the dynamic vibration of the C–C free-form meridian shell of
Table 3 is presented by considering að1Þ ¼ að3Þ ¼ 1,bð1Þ ¼ bð3Þ ¼ 1.
The parameter c¼ cð1Þ ¼ cð3Þ varies from 1 to 13. It can be noted
that the influence of the parameter c is poor and frequencies
gradually decrease by increasing the power-law exponent p and
tend to the metal/ceramic/metal limit case.
5. Conclusion remarks and summary
A generalized differential quadrature method application to
the free vibration analysis of laminated composite and function-
ally graded doubly curved shells and panels of revolution with a
free-form meridian has been presented to illustrate the versatility
and the accuracy of this methodology. The differential quadrature
rule is introduced to determine the geometric parameters of the
structures with a free-form meridian. Simple Rational Bezier
curves are used. Various lamination schemes with different layers
have been considered. New functionally graded material profiles
have been introduced. Ceramic–metal graded shells of revolution
with two four parameter power-law distributions of the volume
fraction of the constituents in the thickness direction have been
considered. Various material profiles through the functionally
graded shell thickness have been illustrated by varying the four
parameters of power-law distributions. The numerical results
have shown the influence of the power-law exponent, of the
power-law distribution choice and of the choice of the four
parameters on the free vibrations of functionally graded shells
considered. Extensive numerical results have been presented,
showing the effect of the choice of the four parameters on shell
frequencies. In general, it can be pointed out that the frequency
vibration of functionally graded shells and panels of revolution
depends on the type of vibration mode, thickness, lamination
scheme, power-law distribution, power-law exponent and the
curvature of the structure.
The adopted shell theory is the First-order Shear Deformation
Theory. In particular, the Toorani–Lakis theory has been used. By
doing so, the Reissner–Mindlin theory becomes a special case of
the Toorani–Lakis theory when the curvature coefficients are set
to zero. The motion equations have been discretized with the
GDQ method giving a standard linear eigenvalue problem. The
vibration results have been obtained without the modal expan-
sion methodology. In this way, the complete 2D differential
system, governing the structural problem has been solved. By
doing so, complete revolution shells have been obtained as special
cases of shell panels by satisfying the kinematic and physical
compatibility conditions. The examples presented show that the
generalized differential quadrature method can produce accurate
results by using a small number of sampling points. Numerical
solutions has been compared with those presented in literature
and the ones obtained using commercial programs such as
Abaqus, Ansys, Nastran, Straus and Pro/Mechanica. The compar-
isons conducted with FEM codes confirm how the GDQ simple
numerical method provides accurate and computationally low
cost results for all the structures considered. The GDQ method
provides converging results for all the cases as the number of grid
points increases. Convergence and stability have been shown.
Furthermore, discretizing and programming procedures are quite
easy. The GDQ results show to be precise and reliable. The
numerical tests demonstrate and confirm the favorable precision
of the generalized differential quadrature method.
Acknowledgments
This research was supported by the Italian Ministry for Uni-
versity and Scientific, Technological Research MIUR (40% and 60%).
Appendix
The equilibrium operators in Eq. (27) assume the following aspect:
L11 ¼1
R2j
ðA11þa1B11þa2D11þa3E11Þ@2
@j2
þ �1
R3j
@Rj
@jðA11þa1B11þa2D11þa3E11Þþ
1
R2j
B11@a1@j
þD11@a2@j
þE11@a3@j
� �
þcosj
RjR0ðA11þa1B11þa2D11þa3E11Þ
!
@
@j
þðA66þb1B66þb2D66þb3E66Þ@2
@s2þ
2A16
Rj
@2
@j@s�sinj
RjR0A12
�cos2j
R20
ðA22þb1B22þb2D22þb3E22Þ�k
R2j
ðA44þa1B44þa2D44þa3E44Þ
L12 ¼1
R2j
ðA16þa1B16þa2D16þa3E16Þ@2
@j2
þ �1
R3j
@Rj
@jðA16þa1B16þa2D16þa3E16Þþ
1
R2j
B16@a1@j
þD16@a2@j
þE16@a3@j
� �
þcosj
RjR0ð�A26þa1B16þa2D16þa3E16Þ
!
@
@j
þðA26þb1B26þb2D26þb3E26Þ@2
@s2þ �
cosj
R0ðA66þb1B66þb2D66þb3E66þA22þb1B22þb2D22þb3E22Þ
� �
@
@s
þA12þA66
Rj
@2
@j@sþ
sinj
RjR0A16þ
cos2j
R20
ðA26þb1B26þb2D26þb3E26Þksinj
RjR0A45
L13 ¼1
R2j
ðA11þa1B11þa2D11þa3E11Þþsinj
RjR0A12þ
k
R2j
ðA44þa1B44þa2D44þa3E44Þ
!
@
@j
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470 465

þsinj
R0ðA26þb1B26þb2D26þb3E26Þþ
A16
Rjþk
A45
Rj
� �
@
@s�
1
R3j
@Rj@j
ðA11þa1B11þa2D11þa3E11Þ
þ1
R2j
B11@a1@j
þD11@a2@j
þE11@a3@j
� �
þ �cosjsinj
R20
þcosj
RjR0
!
A12
þcosj
RjR0ðA11�A12þa1B11þa2D11þa3E11Þþ
cosjsinj
R20
ðA12�A22�b1B22�b2D22�b3E22Þ
L14 ¼1
R2j
ðB11þa1D11þa2E11þa3F11Þ@2
@j2
þ �1
R3j
@Rj@j
ðB11þa1D11þa2E11þa3F11Þþ1
R2j
D11@a1@j
þE11@a2@j
þF11@a3@j
� �
þcosj
RjR0ðB11þa1D11þa2E11þa3F11Þ
!
@
@j
þðB66þb1D66þb2E66þb3F66Þ@2
@s2þ
2B16
Rj
@2
@j@s�sinj
RjR0B12
�cos2j
R20
ðB22þb1D22þb2E22þb3F22Þþk
RjðA44þa1B44þa2D44þa3E44Þ
L15 ¼1
R2j
ðB16þa1D16þa2E16þa3F16Þ@2
@j2
þ �1
R3j
@Rj@j
ðB16þa1D16þa2E16þa3F16Þþ1
R2j
D16@a1@j
þE16@a2@j
þF16@a3@j
� �
þcosj
RjR0ð�B26þa1D16þa2E16þa3F16Þ
!
@
@j
þðB26þb1D26þb2E26þb3F26Þ@2
@s2þ �
cosj
R0ðB66þb1D66þb2E66þb3F66þB22þb1D22þb2E22þb3F22Þ
� �
@
@s
þB12þB66
Rj
@2
@j@sþ
sinj
RjR0B16þ
cos2j
R20
ðB26þb1D26þb2E26þb3F26ÞþkA45
Rj
L21 ¼1
R2j
ðA16þa1B16þa2D16þa3E16Þ@2
@j2
þ �1
R3j
@Rj@j
ðA16þa1B16þa2D16þa3E16Þþ1
R2j
B16@a1@j
þD16@a2@j
þE16@a3@j
� �
þcosj
RjR0ð2A16þA26þa1B16þa2D16þa3E16Þ
!
@
@j
þðA26þb1B26þb2D26þb3E26Þ@2
@s2þ
cosj
R0ðA66þb1B66þb2D66þb3E66þA22þb1B22þb2D22þb3E22Þ
� �
@
@s
þA12þA66
Rj
@2
@j@s�sinj
RjR0A26þ
cos2j
R20
ðA26þb1B26þb2D26þb3E26Þ�ksinj
RjR0A45
L22 ¼1
R2j
ðA66þa1B66þa2D66þa3E66Þ@2
@j2
þ �1
R3j
@Rj@j
ðA66þa1B66þa2D66þa3E66Þþ1
R2j
B66@a1@j
þD66@a2@j
þE66@a3@j
� �
þcosj
RjR0ðA66þa1B66þa2D66þa3E66Þ
!
@
@j
þðA22þb1B22þb2D22þb3E22Þ@2
@s2þ
2A26
Rj
@2
@j@sþ
sinj
RjR0A66
�cos2j
R20
ðA66þb1B66þb2D66þb3E66Þ�ksin2 j
R20
ðA55þb1B55þb2D55þb3E55Þ
L23 ¼1
R2j
ðA16þa1B16þa2D16þa3E16Þþsinj
RjR0A26þk
sinj
RjR0A45
!
@
@j
þsinj
R0ðA22þb1B22þb2D22þb3E22Þþ
A12
Rjþk
sinj
R0ðA55þb1B55þb2D55þb3E55Þ
� �
@
@s
�1
R3j
@Rj
@jðA16þa1B16þa2D16þa3E16Þþ
1
R2j
B16@a1@j
þD16@a2@j
þE16@a3@j
� �
þ �cosjsinj
R20
þcosj
RjR0
!
A26
þcosj
RjR0ð2A16þa1B16þa2D16þa3E16Þþ
cosjsinj
R20
ð2A26þb1B26þb2D26þb3E26Þ
!
L24 ¼1
R2j
ðB16þa1D16þa2E16þa3F16Þ@2
@j2
þ �1
R3j
@Rj@j
ðB16þa1D16þa2E16þa3F16Þþ1
R2j
@a1@j
D16þ@a2@j
E16þ@a3@j
F16
� �
þcosj
RjR0B26þ
cosj
RjR0ð2B16þa1D16þa2E16þa3F16Þ
!
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470466

�@
@jþðB26þb1D26þb2E26þb3F26Þ
@2
@s2þ
cosj
R0ðB22þb1D22þb2E22þb3F22þB66þb1D66þb2E66þb3F66Þ
� �
@
@s
þB12þB66
Rj
@2
@j@s�sinj
RjR0B26þ
cos2j
R20
ðB26þb1D26þb2E26þb3F26Þþksinj
R0A45
L25 ¼1
R2j
ðB66þa1D66þa2E66þa3F66Þ@2
@j2
þ �1
R3j
@Rj
@jðB66þa1D66þa2E66þa3F66Þþ
1
R2j
@a1@j
D66þ@a2@j
E66þ@a3@j
F66
� �
þcosj
RjR0ðB66þa1D66þa2E66þa3F66Þ
!
�@
@jþðB22þb1D22þb2E22þb3F22Þ
@2
@s2þ
2B26
Rj
@2
@j@sþ
sinj
RjR0B66
�cos2j
R20
ðB66þb1D66þb2E66þb3F66Þþksinj
R0ðA55þb1B55þb2D55þb3E55Þ
L31 ¼ �k
R2j
ðA44þa1B44þa2D44þa3E44Þ�1
R2j
ðA11þa1B11þa2D11þa3E11Þ�sinj
RjR0A12
!
@
@j
þ �kA45
Rj�A16
Rj�sinj
R0ðA26þb1B26þb2D26þb3E26Þ
� �
@
@s
þk
R3j
@Rj@j
ðA44þa1B44þa2D44þa3E44Þ�k
R2j
@a1@j
B44þ@a2@j
D44þ@a3@j
E44
� �
�kcosj
RjR0ðA44þa1B44þa2D44þa3E44Þ�
cosj
RjR0A12�
cosjsinj
R20
ðA22þb1B22þb2D22þb3E22Þ
L32 ¼ �ksinj
RjR0A45�
1
R2j
ðA16þa1B16þa2D16þa3E16Þ�sinj
RjR0A26
!
@
@j
þ �ksinj
R0ðA55þb1B55þb2D55þb3E55Þ�
A12
Rj�sinj
R0ðA22þb1B22þb2D22þb3E22Þ
� �
@
@s
�k12cosj
RjR0A45þ
cosj
RjR0A16þ
cosjsinj
R20
ðA26þb1B26þb2D26þb3E26Þ
L33 ¼k
R2j
ðA44þa1B44þa2D44þa3E44Þ@2
@j2
þ �k
R3j
@Rj@j
ðA44þa1B44þa2D44þa3E44Þþk
R2j
@a1@j
B44þ@a2@j
D44þ@a3@j
E44
� �
þkcosj
RjR0ðA44þa1B44þa2D44þa3E44Þ
!
@
@j
þkðA55þb1B55þb2D55þb3E55Þ@2
@s2þk
2A45
Rj
@2
@j@s�2sinj
RjR0A12
�1
R2j
ðA11þa1B11þa2D11þa3E11Þ�sin2j
R20
ðA22þb1B22þb2D22þb3E22Þ
L34 ¼k
RjðA44þa1B44þa2D44þa3E44Þ�
1
R2j
ðB11þa1D11þa2E11þa3F11Þ�sinj
RjR0B12
!
@
@j
þ kA45�B16
Rj�sinj
R0ðB26þb1D26þb2E26þb3F26Þ
� �
@
@sþ
k
Rj
@a1@j
B44þ@a2@j
D44þ@a3@j
E44
� �
þkcosj
R0ðA44þa1B44þa2D44þa3E44Þ
�cosj
RjR0B12�
cosjsinj
R20
ðB22þb1D22þb2E22þb3F22Þ
L35 ¼ kA45
Rj�
1
R2j
ðB16þa1D16þa2E16þa3F16Þ�sinj
RjR0B26
!
@
@j
þ kðA55þb1B55þb2D55þb3E55Þ�B12
Rj�sinj
R0ðB22þb1D22þb2E22þb3F22Þ
� �
@
@s
þkcosj
R0A45þ
cosj
RjR0B16þ
cosjsinj
R20
ðB26þb1D26þb2E26þb3F26Þ
L41 ¼1
R2j
ðB11þa1D11þa2E11þa3F11Þ@2
@j2
þ �1
R3j
@Rj@j
ðB11þa1D11þa2E11þa3F11Þþ1
R2j
@a1@j
D11þ@a2@j
E11þ@a3@j
F11
� �
þcosj
RjR0ðB11þa1D11þa2E11þa3F11Þ
!
@
@j
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470 467

þðB66þb1D66þb2E66þb3F66Þ@2
@s2þ
2B16
Rj
@2
@j@s�sinj
RjR0B12
�cos2j
R20
ðB22þb1D22þb2E22þb3F22Þþk
RjðA44þa1B44þa2D44þa3E44Þ
L42 ¼1
R2j
ðB16þa1D16þa2E16þa3F16Þ@2
@j2
þ �1
R3j
@Rj
@jðB16þa1D16þa2E16þa3F16Þþ
1
R2j
@a1@j
D16þ@a2@j
E16þ@a3@j
F16
� �
þcosj
RjR0ð�B26þa1D16þa2E16þa3F16Þ
!
@
@j
þðB26þb1D26þb2E26þb3F26Þ@2
@s2þ �
cosj
R0ðB66þb1D66þb2E66þb3F66þB22þb1D22þb2E22þb3F22Þ
� �
@
@s
þB12þB66
Rj
@2
@j@sþ
sinj
RjR0B16þ
cos2j
R20
ðB26þb1D26þb2E26þb3F26Þþksinj
R0A45
L43 ¼1
R2j
ðB11þa1D11þa2E11þa3F11Þþsinj
RjR0B12�
k
RjðA44þa1B44þa2D44þa3E44Þ
!
@
@j
þsinj
R0ðB26þb1D26þb2E26þb3F26Þþ
B16
Rj�kA45
� �
@
@s
�1
R3j
@Rj@j
ðB11þa1D11þa2E11þa3F11Þþ1
R2j
@a1@j
D11þ@a2@j
E11þ@a3@j
F11
� �
þ �cosjsinj
R20
þcosj
RjR0
!
B12þcosj
RjR0ðB11�B12þa1D11þa2E11þa3F11Þþ
cosjsinj
R20
ðB12�B22�b1D22�b2E22�b3F22Þ
L44 ¼1
R2j
ðD11þa1E11þa2F11þa3H11Þ@2
@j2
þ �1
R3j
@Rj
@jðD11þa1E11þa2F11þa3H11Þþ
1
R2j
@a1@j
E11þ@a2@j
F11þ@a3@j
H11
� �
þcosj
RjR0ðD11þa1E11þa2F11þa3H11Þ
!
@
@j
þðD66þb1E66þb2F66þb3H66Þ@2
@s2þ
2D16
Rj
@2
@j@s�sinj
RjR0D12
�cos2j
R20
ðD22þb1E22þb2F22þb3H22Þ�kðA44þa1B44þa2D44þa3E44Þ
L45 ¼1
R2j
ðD16þa1E16þa2F16þa3H16Þ@2
@j2
þ �1
R3j
@Rj@j
ðD16þa1E16þa2F16þa3H16Þþ1
R2j
@a1@j
E16þ@a2@j
F16þ@a3@j
H16
� �
þcosj
RjR0ð�D26þa1E16þa2F16þa3H16Þ
!
@
@j
þðD26þb1E26þb2F26þb3H26Þ@2
@s2
þ �cosj
R0ðD66þb1E66þb2F66þb3H66þD22þb1E22þb2F22þb3H22Þ
� �
@
@s
þD12þD66
Rj
@2
@j@sþ
sinj
RjR0D16þ
cos2j
R20
ðD26þb1E26þb2F26þb3H26Þ�kA45
L51 ¼1
R2j
ðB16þa1D16þa2E16þa3F16Þ@2
@j2
þ �1
R3j
@Rj
@jðB16þa1D16þa2E16þa3F16Þþ
1
R2j
@a1@j
D16þ@a2@j
E16þ@a3@j
F16
� �
þcosj
RjR0ð2B16þB26þa1D16þa2E16þa3F16Þ
!
�@
@jþðB26þb1D26þb2E26þb3F26Þ
@2
@s2
þcosj
R0ðB66þb1D66þb2E66þb3F66þB22þb1D22þb2E22þb3F22Þ
� �
@
@s
þB12þB66
Rj
@2
@j@s�sinj
RjR0B26þ
cos2j
R20
ðB26þb1D26þb2E26þb3F26ÞþkA45
Rj
L52 ¼1
R2j
ðB66þa1D66þa2E66þa3F66Þ@2
@j2
þ �1
R3j
@Rj@j
ðB66þa1D66þa2E66þa3F66Þþ1
R2j
@a1@j
D66þ@a2@j
E66þ@a3@j
F66
� �
þcosj
RjR0ðB66þa1D66þa2E66þa3F66Þ
!
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470468

�@
@jþðB22þb1D22þb2E22þb3F22Þ
@2
@s2þ
2B26
Rj
@2
@j@sþ
sinj
RjR0B66
�cos2j
R20
ðB66þb1D66þb2E66þb3F66Þþksinj
R0ðA55þb1B55þb2D55þb3E55Þ
L53 ¼1
R2j
ðB16þa1D16þa2E16þa3F16Þþsinj
RjR0B26�
k
RjA45
!
@
@j
þsinj
R0ðB22þb1D22þb2E22þb3F22Þþ
B12
Rj�kðA55þb1B55þb2D55þb3E55Þ
� �
@
@s
�1
R3j
@Rj@j
ðB16þa1D16þa2E16þa3F16Þþ1
R2j
@a1@j
D16þ@a2@j
E16þ@a3@j
F16
� �
þ �cosjsinj
R20
þcosj
RjR0
!
B26þcosj
RjR0ð2B16þa1D16þa2E16þa3F16Þ
þcosjsinj
R20
ð2B26þb1D26þb2E26þb3F26Þ
L54 ¼1
R2j
ðD16þa1E16þa2F16þa3H16Þ@2
@j2
þ �1
R3j
@Rj
@jðD16þa1E16þa2F16þa3H16Þþ
1
R2j
@a1@j
E16þ@a2@j
F16þ@a3@j
H16
� �
þcosj
RjR0ð2D16þD26þa1E16þa2F16þa3H16Þ
!
�@
@jþðD26þb1E26þb2F26þb3H26Þ
@2
@s2þ
cosj
R0ðD22þb1E22þb2F22þb3H22þD66þb1E66þb2F66þb3H66Þ
@
@s
þD12þD66
Rj
@2
@j@s�sinj
RjR0D26þ
cos2j
R20
ðD26þb1E26þb2F26þb3H26Þ�kA45
L55 ¼1
R2j
ðD66þa1E66þa2F66þa3H66Þ@2
@j2
þ �1
R3j
@Rj
@jðD66þa1E66þa2F66þa3H66Þþ
1
R2j
@a1@j
E66þ@a2@j
F66þ@a3@j
H66
� �
þcosj
RjR0ðD66þa1E66þa2F66þa3H66Þ
!
@
@j
þðD22þb1E22þb2F22þb3H22Þ@2
@s2þ
2D26
Rj
@2
@j@sþ
sinj
RjR0D66
�cos2j
R20
ðD66þb1E66þb2F66þb3H66Þ�kðA55þb1B55þb2D55þb3E55Þ
References
[1] Timoshenko S, Woinowsky-Krieger S. Theory of plates and shells. New York:
McGraw-Hill; 1959.
[2] Flugge W. Stresses in shells. Berlin: Springer-Verlag; 1960.
[3] Gol’Denveizer AL. Theory of elastic thin shells. Oxford: Pergamon Press;
1961.
[4] Novozhilov VV. Thin shell theory, Groningen: P. Noordhoff; 1964.
[5] Vlasov VZ. General theory of shells and its application in engineering, NASA-
TT-F-99, 1964.
[6] Ambartusumyan SA. Theory of anisotropic shells, NASA-TT-F-118, 1964.
[7] Kraus H. Thin elastic shells. New York: John Wiley & Sons; 1967.
[8] Leissa AW. Vibration of plates, NASA-SP-160, 1969.
[9] Leissa AW. Vibration of shells, NASA-SP-288, 1973.
[10] Markus S. The mechanics of vibrations of cylindrical shells. New York:
Elsevier; 1988.
[11] Ventsel E, Krauthammer T. Thin plates and shells. New York: Marcel Dekker;
2001.
[12] Soedel W. Vibrations of shells and plates. New York: Marcel Dekker; 2004.
[13] Shu C. An efficient approach for free vibration analysis of conical shells. Int J
Mech Sci 1996;38:535–49.
[14] Hua L, Lam KY. The generalized quadrature method for frequency analysis of
a rotating conical shell with initial pressure. Int J Num Methods Eng 2000;48:
1703–22.
[15] Ng TY, Li H, Lam KY. Generalized differential quadrature method for the free
vibration of rotating composite laminated conical shell with various bound-
ary conditions. Int J Mech Sci 2003;45:567–87.
[16] Redekop D. Buckling analysis of an orthotropic thin shell of revolution using
differential quadrature. Int J Pressure Ves Pip 2005;82:618–24.
[17] Zhang L, Xiang Y, Wei GW. Local adaptive differential quadrature for free
vibration analysis of cylindrical shells with various boundary conditions. Int J
Mech Sci 2006;48:1126–38.
[18] Wang X, Wang X, Shi X. Accurate buckling loads of thin rectangular platesunder parabolic edge compressions by the differential quadrature method.
Int J Mech Sci 2007;49:447–53.[19] Reissner E. The effect of transverse shear deformation on the bending of
elastic plates. J Appl Mech—Trans ASME 1945;12:66–77.[20] Gould PL. Finite element analysis of shells of revolution. Boston: Pitman
Publishing; 1984.
[21] Gould PL. Analysis of plates and shells. Upper Saddle River: Prentice-Hall;1999.
[22] Toorani MH, Lakis AA. General equations of anisotropic plates and shellsincluding transverse shear deformations, rotary inertia and initial curvatureeffects. J. Sound Vib 2000;237:561–615.
[23] Reddy JN. Mechanics of laminated composites plates and shells. New York:
CRC Press; 2003.[24] Wu CP, Tarn JQ, Tang SC. A refined asymptotic theory of dynamic analysis of
doubly curved laminated shells. Int J Solid Struct 1998;35:1953–79.[25] Wu CP, Lee CY. Differential quadrature solution for the free vibration analysis
of laminated conical shells with variable stiffness. Int J Mech Sci 2001;43:1853–69.
[26] Messina A. Free vibrations of multilayered doubly curved shells based on amixed variational approach and global piecewise-smooth functions. Int JSolid Struct 2003;40:3069–88.
[27] Viola E, Artioli E. The G.D.Q. method for the harmonic dynamic analysis ofrotational shell structural elements. Struct Eng Mech 2004;17:789–817.
[28] Artioli E, Gould P, Viola E. A differential quadrature method solution for
shear-deformable shells of revolution. Eng Struct 2005;27:1879–92.[29] Artioli E, Viola E. Static analysis of shear-deformable shells of revolution via
G.D.Q. method. Struct Eng Mech 2005;19:459–75.[30] Artioli E, Viola E. Free vibration analysis of spherical caps using a
G.D.Q. numerical solution. J Pressure Ves-Technol—Trans ASME 2006;128:
370–8.[31] Farin G. Curves and surfaces for computer aided geometric design. Boston:
Academic Press; 1990.[32] Piegl L, Tiller W. The NURBS book. Berlin: Springer; 1997.
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470 469

[33] Beccari CV, Farella E, Liverani A, Morigi S, Rucci M. A fast interactive reverse-engineering system. CAD 2010;42:860–73.
[34] Amati G, Liverani A, Caligiana G. From spline to Class-A curves through multi-scale analysis filtering. Comput. Graphics 2006;30:345–52.
[35] Shu C. Differential quadrature and its application in engineering. Berlin:Springer; 2000.
[36] Yang J, Kitipornchai S, Liew KM. Large amplitude vibration of thermo-electro-mechanically stressed FGM laminated plates. Comput Methods Appl MechEng 2003;192:3861–85.
[37] Wu CP, Tsai YH. Asymptotic DQ solutions of functionally graded annularspherical shells. Eur J Mech A—Solids 2004;23:283–99.
[38] Elishakoff I, Gentilini C, Viola E. Forced vibrations of functionally gradedplates in the three-dimensional setting. AIAA J 2005;43:2000–7.
[39] Elishakoff I, Gentilini C, Viola E. Three-dimensional analysis of an all-aroundclamped plate made of functionally graded materials. Acta Mech 2005;180:21–36.
[40] Patel BP, Gupta SS, Loknath MS, Kadu CP. Free vibration analysis offunctionally graded elliptical cylindrical shells using higher-order theory.Compos Struct 2005;69:259–70.
[41] Abrate S. Free vibration, buckling, and static deflection of functionally gradedplates. Compos Sci Technol 2006;66:2383–94.
[42] Pelletier JL, Vel SS. An exact solution for the steady-state thermoelasticresponse of functionally graded orthotropic cylindrical shells. Int J SolidsStruct 2006;43:1131–58.
[43] Arciniega RA, Reddy JN. Large deformation analysis of functionally gradedshells. Int J Solids Struct 2007;44:2036–52.
[44] Roque CMC, Ferreira AJM, Jorge RMN. A radial basis function for the freevibration analysis of functionally graded plates using refined theory. J SoundVib 2007;300:1048–70.
[45] Allahverdizadeh A, Naei MH, Nikkhah Bahrami M. Vibration amplitude andthermal effects on the nonlinear behavior of thin circular functionally gradedplates. Int J Mech Sci 2008;50:445–54.
[46] Zhao X, Liew KM. Geometrically nonlinear analysis of functionally gradedshells. Int J Mech Sci 2009;51:131–44.
[47] Shen HS. Postbuckling of shear deformable FGM cylindrical shells surroundedby an elastic medium. Int J Mech Sci 2009;51:372–83.
[48] Zenkour AM. The refined sinusoidal theory for FGM plates on elasticfoundations. Int J Mech Sci 2009;51:869–80.
[49] Sobhani Aragh B, Yas MH. Three-dimensional analysis of thermal stresses infour-parameter continuous grading fiber reinforced cylindrical panels. Int JMech Sci 2010;52:1047–63.
[50] Hosseimi-Hashemi S, Fadaee M, Atashipour SR. A new exact analyticalapproach for free vibration of Reissner–Mindlin functionally graded rectan-gular plates. Int J Mech Sci 2011;53:11–22.
[51] Tornabene F. Vibration analysis of functionally graded conical, cylindrical andannular shell structures with a four-parameter power-law distribution.Comput Methods Appl Mech Eng 2009;198:2911–35.
[52] Bert C, Malik M. Differential quadrature method in computational mechanics.Appl Mech Rev 1996;49:1–27.
[53] Lam KY, Hua L. Influence of initial pressure on frequency characteristics of arotating truncated circular conical shell. Int J Mech Sci 2000;42:213–36.
[54] Liew KM, Teo TM, Han JB. Three-dimensional static solutions of rectangularplates by variant differential quadrature method. Int J Mech Sci 2001;43:1611–28.
[55] Wang X, Wang Y. Free vibration analyses of thin sector plates by the newversion of differential quadrature method. Comput Methods Appl Mech Eng2004;193:3957–71.
[56] Malekzadeh P, Karami G, Farid M. A semi-analytical DQEM for free vibrationanalysis of thick plates with two opposite edges simply supported. ComputMethods Appl Mech Eng 2004;193:4781–96.
[57] Viola E, Tornabene F. Vibration analysis of damaged circular arches withvarying cross-section. Struct Integr Durab (SID-SDHM) 2005;1:155–69.
[58] Viola E, Tornabene F. Vibration analysis of conical shell structures using GDQ
method. Far East J Appl Math 2006;25:23–39.[59] Tornabene F. Modellazione e Soluzione di Strutture a Guscio in Materiale
Anisotropo. PhD thesis, University of Bologna—DISTART Department, 2007.[60] Tornabene F, Viola E. Vibration analysis of spherical structural elements
using the GDQ method. Comput Math Appl 2007;53:1538–60.[61] Viola E, Dilena M, Tornabene F. Analytical and numerical results for vibration
analysis of multi-stepped and multi-damaged circular arches. J Sound Vib
2007;299:143–63.[62] Marzani A, Tornabene F, Viola E. Nonconservative stability problems via
generalized differential quadrature method. J Sound Vib 2008;315:176–96.[63] Tornabene F, Viola E. 2-D solution for free vibrations of parabolic shells using
generalized differential quadrature method. Eur J Mech A/Solids 2008;27:
1001–25.[64] Alibeigloo A, Modoliat R. Static analysis of cross-ply laminated plates with
integrated surface piezoelectric layers using differential quadrature. Comput
Struct 2009;88:342–53.[65] Tornabene F, Viola E. Free vibrations of four-parameter functionally graded
parabolic panels and shell of revolution. Eur J Mech A/Solids 2009;28:
991–1013.[66] Tornabene F, Viola E. Free vibration analysis of functionally graded panels
and shells of revolution. Meccanica 2009;44:255–81.[67] Tornabene F, Viola E, Inman DJ. 2-D differential quadrature solution for
vibration analysis of functionally graded conical, cylindrical and annular shell
structures. J Sound Vib 2009;328:259–90.[68] Viola E, Tornabene F. Free vibrations of three parameter functionally graded
parabolic panels of revolution. Mech Res Commun 2009;36:587–94.[69] Tornabene F, Marzani A, Viola E, Elishakoff I. Critical flow speeds of pipes
conveying fluid by the generalized differential quadrature method. Adv Theor
Appl Mech 2010;3:121–38.[70] Alibeigloo A, Nouri V. Static analysis of functionally graded cylindrical shell
with piezoelectric layers using differential quadrature method. Compos
Struct 2010;92:1775–85.[71] Andakhshideh A, Maleki S, Aghdam MM. Non-linear bending analysis of
laminated sector plates using generalized differential quadrature. Compos
Struct 2010;92:2258–64.[72] Malekzadeh P, Alibeygi Beni A. Free vibration of functionally graded arbitrary
straight-sided quadrilateral plates in thermal environment. Compos Struct
2010;92:2758–67.[73] Sepahi O, Forouzan MR, Malekzadeh P. Large deflection analysis of thermo-
mechanical loaded annular FGM plates on nonlinear elastic foundation via
DQM. Compos Struct 2010;92:2369–78.[74] Yas MH, Sobhani Aragh B. Three-dimensional analysis for thermoelastic
response of functionally graded fiber reinforced cylindrical panel. Compos
Struct 2010;92:2391–9.[75] Tornabene F. Free Vibrations of laminated composite doubly-curved shells
and panels of revolution via the GDQ method. Comput Methods Appl Mech
Eng 2011;200:931–52.[76] Tornabene F. 2-D GDQ solution for free vibrations of anisotropic doubly-
curved shells and panels of revolution. Compos Struct 2011;in press, doi:10.
1016/j.compstruct.2011.02.006.[77] Auricchio F, Sacco E. A mixed-enhanced finite-element for the analysis of
laminated composite plates. Int J Num Methods Eng 1999;44:1481–504.[78] Alfano G, Auricchio F, Rosati L, Sacco E. MITC finite elements for laminated
composite plates. Int J Num Methods Eng 2001;50:707–38.[79] Auricchio F, Sacco E. Refined first-order shear deformation theory models for
composite laminates. J Appl Mech 2003;70:381–90.[80] Hosseini-Hashemi Sh, Fadaee M, Es’haghi M. A novel approach for in-plane/
out-of-plane frequency analysis of functionally graded circular/annular
plates. Int J Mech Sci 2010;52:1025–35.
F. Tornabene et al. / International Journal of Mechanical Sciences 53 (2011) 446–470470