1. PENDAHULUAN yang menpebdbkan scbuah hdn oleh ...
41
11, TEORI PENUNJANG 1. PENDAHULUAN PLL adalah sebudh r-~~nykalari yang menpebdbkan scbuah sistern khusus untuh rnengikut i je jak yang 111 . Atau lebih tepat , PLI <i11<t ! :;II<I LLL I-arlqkdidri ydrlq III~-*:I:;LII~,~ 011 - han phase dari frekuerlsj st buah srcfhdl output (dlbangkj t hdn oleh oscTil lator I f r ekue~lsi s 1qr1'11 I t~puL d! ,i~t reference. Blok diagr drr~ : t tin PLL sc3pel t I sn~nt~a~ 2 : . GAMBAK 2-1' 9 BLOK DIAGKAY PLL, Dalarn keadaan sinkron yalig serlrlg dlsebut "loch", r111dr:t. . -- - - - - - - - 1, Dr. lollnd K. Best, PIIASG-MCIKD LOOPS theory, Dtsiqr, aad Ipplicitioas, IlcCIAI-BILL, Inc., 1984, ha1.l
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of 1. PENDAHULUAN yang menpebdbkan scbuah hdn oleh ...
11, TEORI PENUNJANG
1. PENDAHULUAN
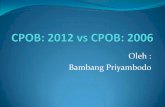
PLL adalah s e b u d h r - ~ ~ n y k a l a r i yang menpebdbkan scbuah
sistern khusus u n t u h rnengikut i je jak yang 1 1 1 . A t a u
l e b i h tepat , PLI < i11< t ! :;II<I L L L I - a r lqkd idr i ydrlq I I I ~ - * : I : ; L I I ~ , ~ 011 -
h a n phase dari f r e k u e r l s j st buah srcfhdl o u t p u t (dlbangkj t
hdn oleh oscTil l a t o r I f r e k u e ~ l s i s 1qr1'11 I t ~ p u L d! , i ~ t
reference. Blok d i a g r drr~ :: t tin PLL sc3pel t I s n ~ n t ~ a ~ 2 : .
GAMBAK 2-1 ' 9
BLOK D I A G K A Y PLL,
Dalarn keadaan sinkron yalig s e r l r l g dlsebut "loch", r111dr:t.
. -- - - - - - - -
1, Dr. lollnd K . Best, PIIASG-MCIKD LOOPS theory, Dtsiqr, aad Ipplicitioas, IlcCIAI-BILL, Inc., 1984, ha1 . l
error antara signal output oscillato~ dan signal r .e f el
ence adalah no1 atau sangat kecil.
Jika terjadi phase error, suatu meka~~isme kvntl-ell
bekerja pada phase detektor sehingga phase error diku-
rangi lagi sampai minimum.
2. PLL UNTUK PENGATUR MOTOR DC
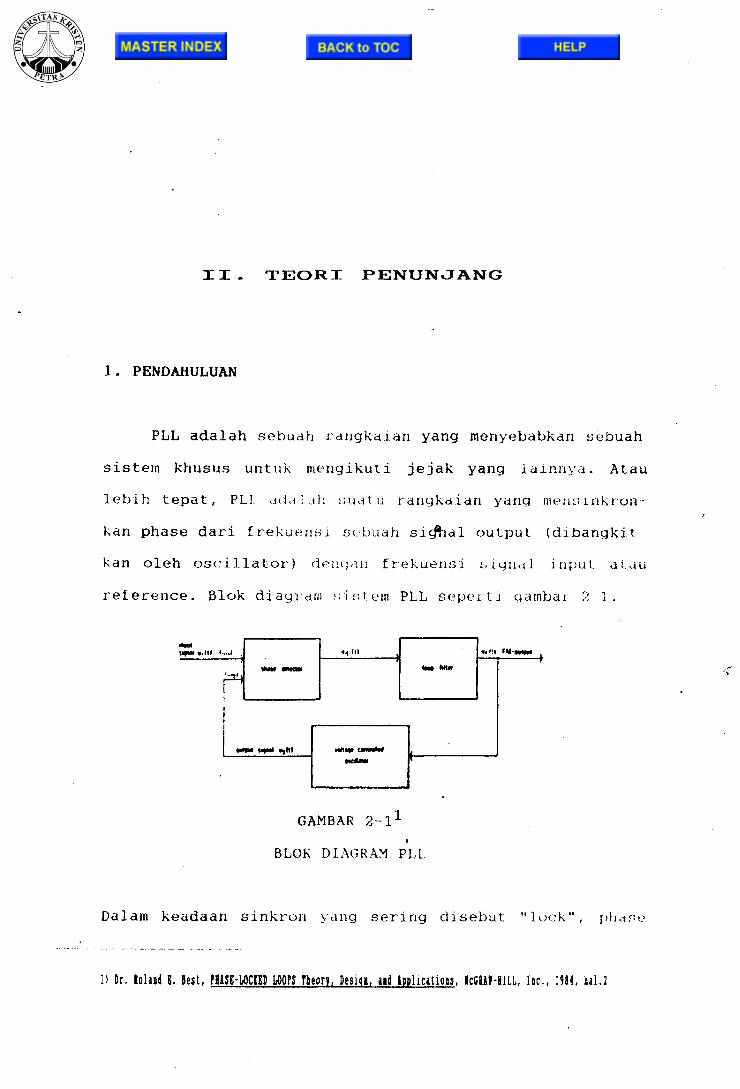
Dasar dari pengaturan motor DC dengar! servo phase-
lock ditunjukkan dalam blok diagram yambar 2 - 2 .
GAMBAR 2-2 '
DASAR SERVO PHASELOCK
Motor DC mempunyai sebudh piringdri dengan lint. S
yang dipasarlg pada shaft rnc_)tor atau d i d a l a ~ ~ i motor. Sobuall
lampu LED diletakkan d i s a t i i s is l d d ~ 1 p i 1 1 1 l c ~ d 1 1 ~ 1 d r 1 p l i ( - ) t < ~
sensor disisi yang lairin~*a. B i l a pi1 i11cjd11 berputar s i n a z
- - - ---- - - - - - - - -- -
2, Dana P. Geiger, , John Y ~ l e y 6 Sons, Inc., 1981, h a i . 3
yang sampai ke photosensor akan bergantla11 dlteruskan ddn
diblok, maka output dari phototransist-or aha11 mc~lrcjhasil-
kan gelombang sinus, dimana biasanya dlkuatka:~ da11 dlbuat
menjadi gelombang persegi.
Fungsi dari blok phaselock el ek tro~li h sama dengan
blok phase detektor dan loop filter a d a l a h u n t u k ~nende
teksi perbedaan antara f dall t dCh dan mendorong mot.or
supaya terjadi persesuaian untuk tiap cycle dari frekuen-
si tachometer dan referensi. Dengan demikian kecepatan
motor tepat samn dengan referensi.
Sebagai pembangkit fief dipahdl progrdntmable inte~ -
\ a1 t i~ner 8253 yang dilic>ntrol prosescjr. Z 8 0 . , -
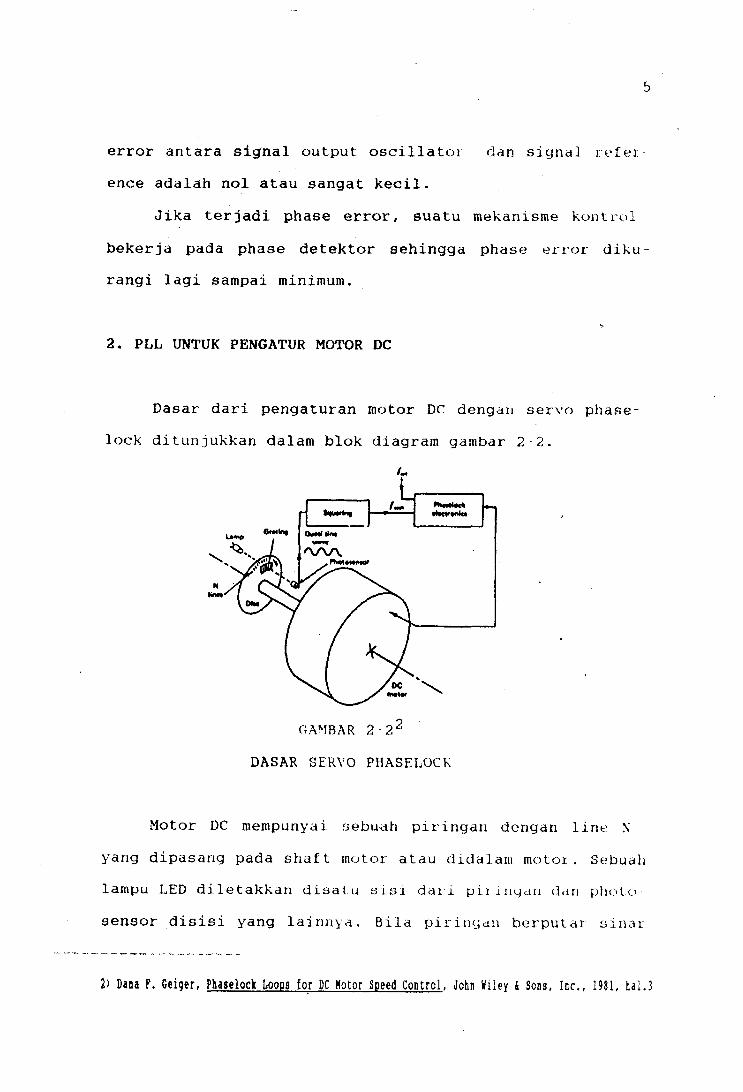
2.1 Motor DC Maqnet Permanen
?lotor DC lnaynet pel I I I ~ I I ~ ~ ~ I r l c t [ ) , ~ t d l 1 \ i t , 1 : ;hCi l i : 3 - s ; , , . i '
rangkaian ganlbar 2- 3.
GAMBAR 2- 3 3
RANGKAIAN U S T U K l O r O R YAC;SE'I' PEKI. ' \ \EN
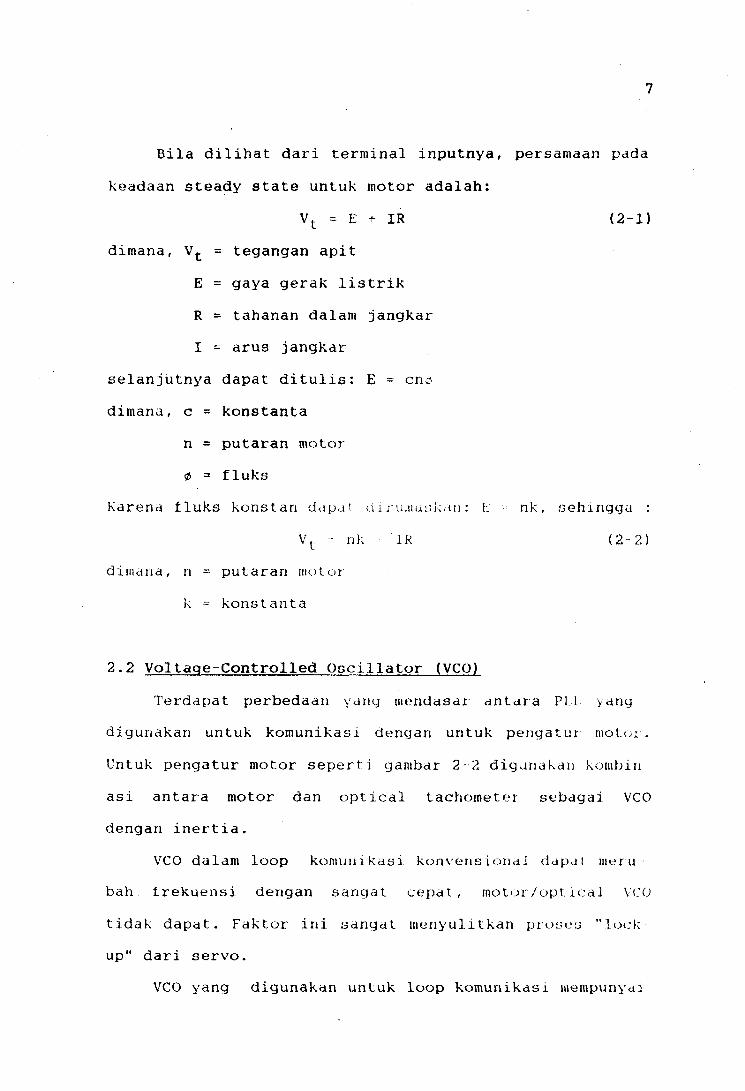
Bila dilihat dari terminal inputnya, persamaan pada
keadaan steady state untuk motor adalah:
Vt = E + IR
dimana, Vt = tegangan apit
E = gaya gerak listrik
R = tahanan dalam jangkar
I = arus jangkar
selanjutnya dapat ditulis: E = c n r
dimana, c = konstanta
n = putaran m o t o r
0 = fluks
Iiarend fluks hons tar1 dclpd l i i I U I : r i k , f;eh~rigc]ci :
V t - 11h IK ( 2 2 )
dlrndrla, n = putaran iao tor
h = konstanta
2.2 Voltaqe-Controlled Oscillator (VCO)
Terddpat perbedadrl ydny aondasar dntdra P1.i ldny
digur~akan untuk komunikasi denyan urltuk per~yatur n~oto: .
C'ntuk pengatur motor seperti gdnlbdr 2 - 2 diy~rlahdn honibirl
asi antara motor dan optical tachometer sebagal VCO
dengan inertia.
VCO dalam loop konl~rlllkdsl kon\,erlslc)ridl ddpdt IIIL~L u
bah f rekuensi derlgarl sangat cepdt , rnoto~ /opt l c d l I ( ' 0
tidak dapdt . Faktor irii sdnqdt r~~er~yullthan gr c)ac?s " l o c k
up" dari servo.
VCO yanq digunakan untuk loop komunikasl iuenipunydi
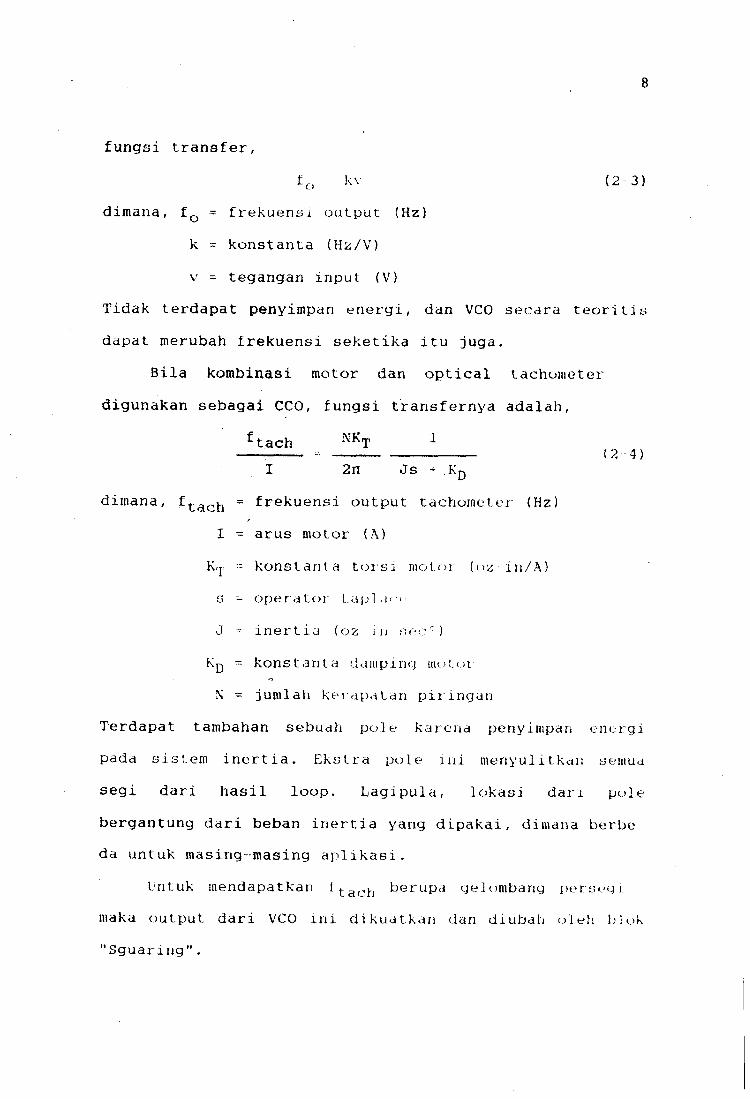
fungsi transfer,
,) k \
dimana, fo = frekuensl output (Hz)
k = kvnstanta (Mz/V)
ir = tegangan input ( V )
Tidak terdapat penyimpan ensrgi, dan VCO secara t eor i tis
dapat merubah frekuensi seketika itu juga.
Bila kombinasi motor dan optical tachometer
digunakan sebagai CCO, fungsi t'ransfernya adalah,
tach NKT 1
dirnana, ftach = frekuensi output tachomet el- (Hz)
I = arus motor ( A )
K - konstant a torsi m c ~ t o t (oz i11/.4)
Terdapat tambahan sebudh pole karcna penyimpdn t> I l e rg i
pada s i s tern inertia. Ekstrd p o l e 111.i lnenyuli t ka11 :;t>laud
segi dari hasil loop. Layipula, l o k a s i d a r l p u l e
bergantuny dari beban inertia yany dipakai , diinana berbe
dd untuk masing--masing a ~ - ) l l k a s i .
I n t u k mendapatkarl f t d c h berup'4 qelombdrlg persta(j I
lllakd o u t p u t dari VCO ll~j dik~idtkdrl d a n diubdh o l r h b i o h
"Sguaring".
2.2.1 Tachometer.
Optical tachometer digunakan sebagai feedback untuh
sistem phaselocked, karena inertia kecil, noise kecil,
resolusi tinggi, dan akurasi tinggi cocok untuk kontrol
motor DC . Optical tachometer merupakan kon~yunen yang
paling kritis dalam sisteni PLL. Kualitasnyd nienentilkan
secara langsung akurasi dari kecepatan putar motor.
Untuk tachometer ini dapat dibuat sendiri, tetapi
karena kwalitasnya sangat menentukan maka blacanya meru
pakan bagidt? d ' i r l motor DC tersebut. Karenct dalani t ugas
akhir i n 1 mengyunakan motor DC yang sudah mernptr~~yai
tachornetel, tacihd t ~ d d h dildkukan pembahd:idri n~encletiai
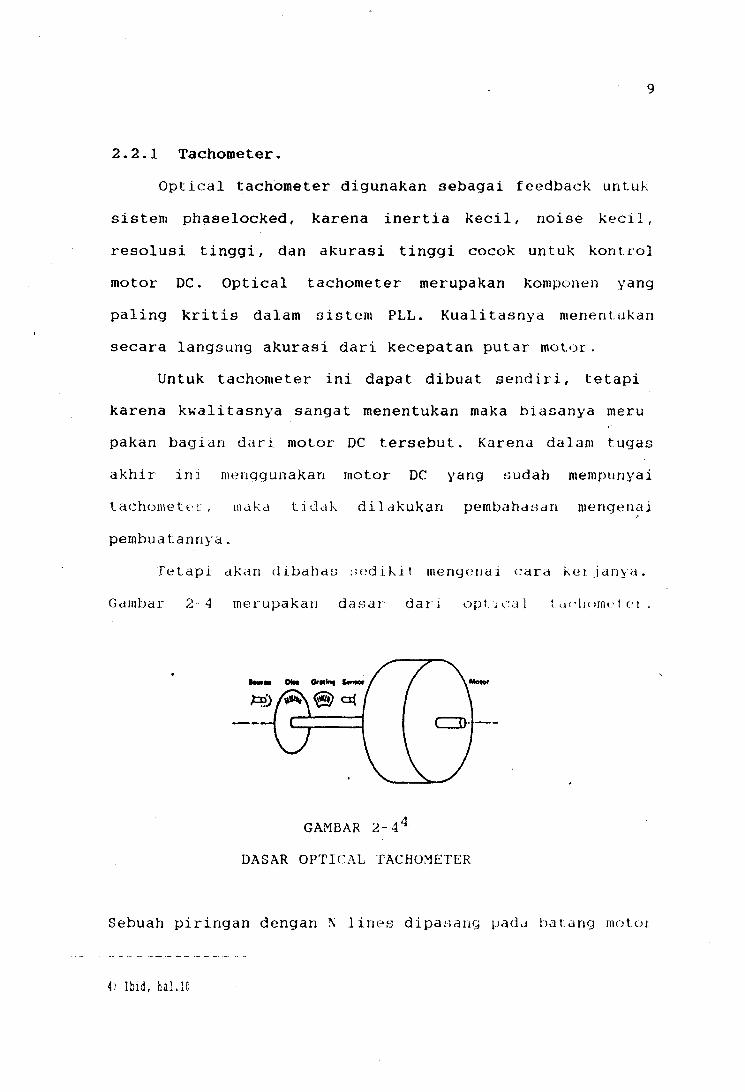
pembua tanr~ya . r e t a p 1 dkdn d l b d h d a :;r!d L h i t menyc?fldi c:drd her j d r i y d .
Gambar 2 3 rnt.1-upakan d d s d ~ clat 1 o p t J <-d l : ~ t c - i ~ o r n t ~ t 6 . 1 .
GAMBAR 2 - g 4
DASAR OPTICAL TACHOYETER
Sebuah piringan dengan N lines dipasd~ly pad4 bat dr~y moto~
-- - . - - - - -. - - - - -
4 1 Ibld, hal.16
( s h a f t ) . N b i a s a n y a a n t a r a 50 d a n 5000 l i n e (unt.uk I.>i
r i nga l l dengan d i a m e t e r 2 , 5 i n ) . B i l a p i r i n g a n b e r p u t a r
sat-LI k a l i , N l i n e akan m e l e w a t i d e t e k t o r . Maka f r e k u e n s i
d a ~ - 1 o u t p u t s i g n a l a d d l a h :
d imana , f tach = f r e k u e n s i o u t p u t t d c h o m e t e r (Hz)
N = jumlah l i n e
r p m = p u t a r a n p e r men i t
2.2.2 Detektor Taraf Teganyan Tak Membalik.
Seperti t e r l i h a t pclda gdmhdr. 2 2, t.erddi,,it , 1
" Scluaririg" yany mempuil?.dr t i lnys J un t uk merub, t l l i , t h i i t i t 1
A n d l l : ;d d d r i 1 dtlCJhrt~d11 1 1 1 1 , ~ ( i d l dfl ~ t ? k ) d g d i t)t.'t l k \ l t , -,
T a h a n a n un ipa~l - -ba l ik p o s i t I f d a r i k e l u a r a ~ i k e m a s u k d l ! ( - 1
m e n u n j u k k a n ddanyd h i s t e l s-:;I r; dalani r drlgkaian ganibar 2 5 .
rdngka iannya tak-membdl i h . I'eydrigarl dcuan V r e f d l t c ~ dphdll
ke masukan o p ampnya.
Tecjdrlgan dmbang d t d:; ddn dnlbdrlq bdhakl ciiddpd t hdrl
d a r i persamaan be r iku t . :
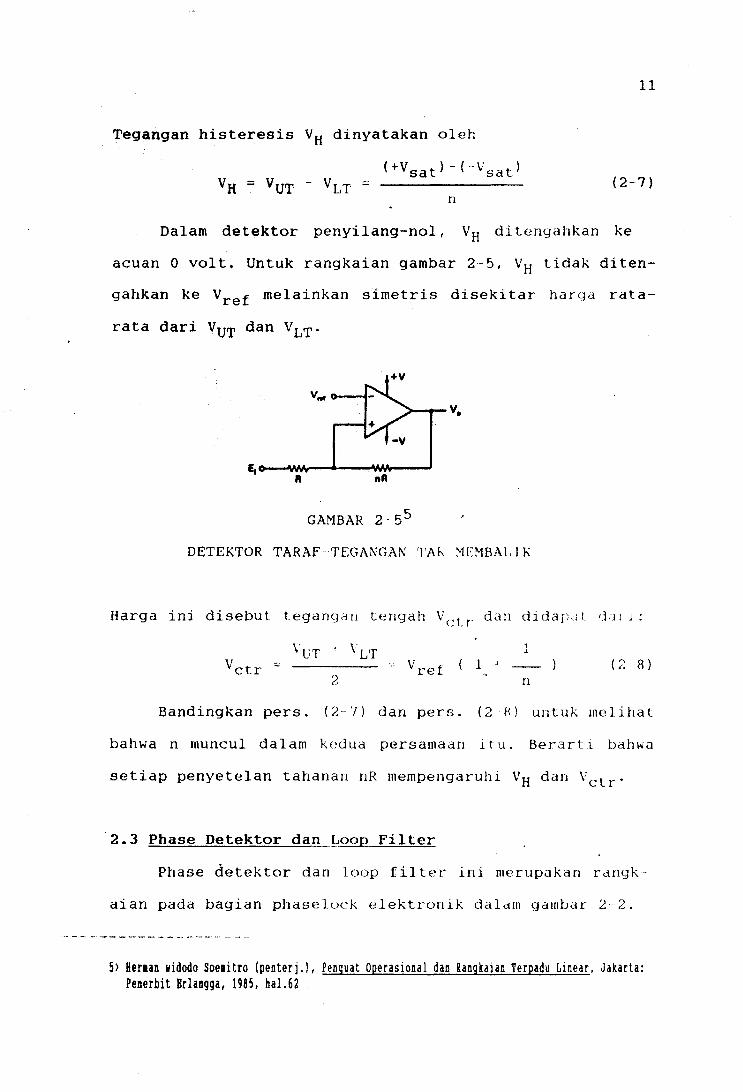
Tegangan histeresis VH dinyatakan oleh
Dalam detektor penyilang-no1 , VH di teriqakikan ke
acuan 0 volt. Untuk rangkaian gambar 2-5, V H tidak diten-
gahkan ke Vref melainkan simetris disekitar h a r g d rata-
rata dari VUT dan VLT.
GAMBAK 2 - 5 5
DE'I 'EKTOR TARAF T E G A N G A X 'I'AK ? l E Y B A I , 11.;
Harga ini disebut tegdncldr~ tengah d a n d l t i a ~ : ~ i : d q 3 ; , :
Bandingkan pers. ( 2 - 7 ) dan pers. ( 2 8 ) u~~t.uli ~nelihat
bahwa n niuncul dalam kcdua persamadrl l t u. Berdrt i bdhwa
setiap penyetelan tahana~~ nR mempengaruhi VH dan V c t r .
2.3 Phase Detektor dan Loop Filter
Phase detektor dan loop filter i n i merupakan r d r l y k
aian pada bagian phaselock elektronik dd1d111 CJdlllhdI 2 2 .
5 ) Eeraan uidodo S o e ~ i t r o (penterj.), Penquat Operasional dan Banqkaian Terpadu Linear, Jakarta: Penerbit Brlangga, 1985, ba1.62
Error detektor dalam loop kon~ur~ikdsl adaldh phase
detektor sejati yang outputnya :;cbdndlnq dongan dengan
perbedaan phase antara f rekuensi ref erenc-e dan tachome-
ter. Phase detektor digunakan u n t u k mempcroleh kembali
inf ormasi yang terdapat dalam phase signal reference.
Secara matematis, Phase detektor sejati nienetapkan:
E = Oref - O t d ~ h
dimana E = phase error.
Dalam loop motor kontrol tidak ada informasi dalam phdsc
signal reference. Maka dari itu, motor kontrol tidak
memerlukan phaselock, tetapi hdnyd integrasi dari f reku-
c n s i error. Sebuah integrator scderhana memberikdn:
dimana, h - 211f
Integrat or 1r1i tjila d i c ~ u n d h a l l (Id l ,ill\ 1'1 ; , 1 1 1 t ~ 1 : > , 1 t , : : ~ i . I , ; J < ~ i
error antdra fief dar~ f tdc:ll = I , d e r i q d ~ ~ d L ~ V I I I . L ~ ~
menghasilkan "f requericy l o c k " . ~e tabi , ~ I I tcyrd to: t i d a k
nienghasilka~~ perse~uai~i~i pilase c i ~ r t ,t ttcici~ dcill h c f #
harena K t i d a f ; di tentukal~, dan n i u ~ ~ c l ) \ i n tetdp nierll j m ~ ) . i ~ i c j . Untuk 111~1idapathdrl pers(:~;udlan pt~,j:;t- ditlasilkcirl tlerigar~
bantuan rangkain lain.
- Counter dan D / A Detector
Ini bukan merupalidri phdsc? dett-ctu! se jdtl, t e t . d l ~ 1
sebuah integrator. Merlyyundkan sebuah c l i y l t a l u p tlt.)wn
counter (sering 8 bit) ddn sebuah Digital t u Ar~dloy ( U / . \ )
konverter ( juga 8 bit . Deteczto~ it11 dkdn menghdsilkarl
output yany sesuai denydi l persamaan integral diatas dan
memba~~tu mengatasi maser l z t t ~ !.any men jadi : ; i f d t pada phase
detektor yang l a i n .
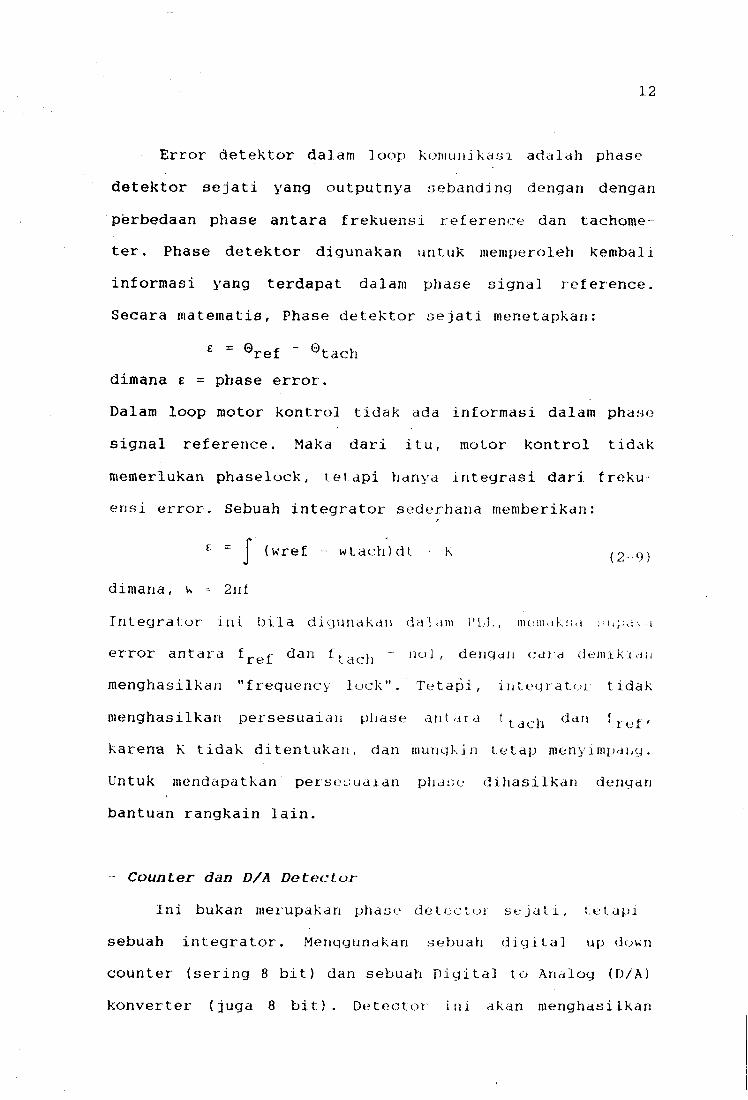
Blok didyram untuk sistem kontrol PLL ini digambar-
kan seperti gambar 2 6. Blok yarig rnerupakar~ bagian dari
Phase Detektor ini adaldh: F/V konverter, 9 / A integrator,
rangkaian Op amp dan Z 4 yang menjumlahkan ketiga s ~ g r l a l
error. Ketiga signal error tersebut adalah: kecepatan . error (pada A), irltegrl kecepatar~ error (pada 0 ) dan
double integral kecepatan error (pada C).
Af )rrm-1 nuom
OC motor
Trlcnconduccm rmplt*r l rJvl
T
G A M B A R 2 h 6
BLOK DIXGKAX 81 STEN KOSTKOL PLId
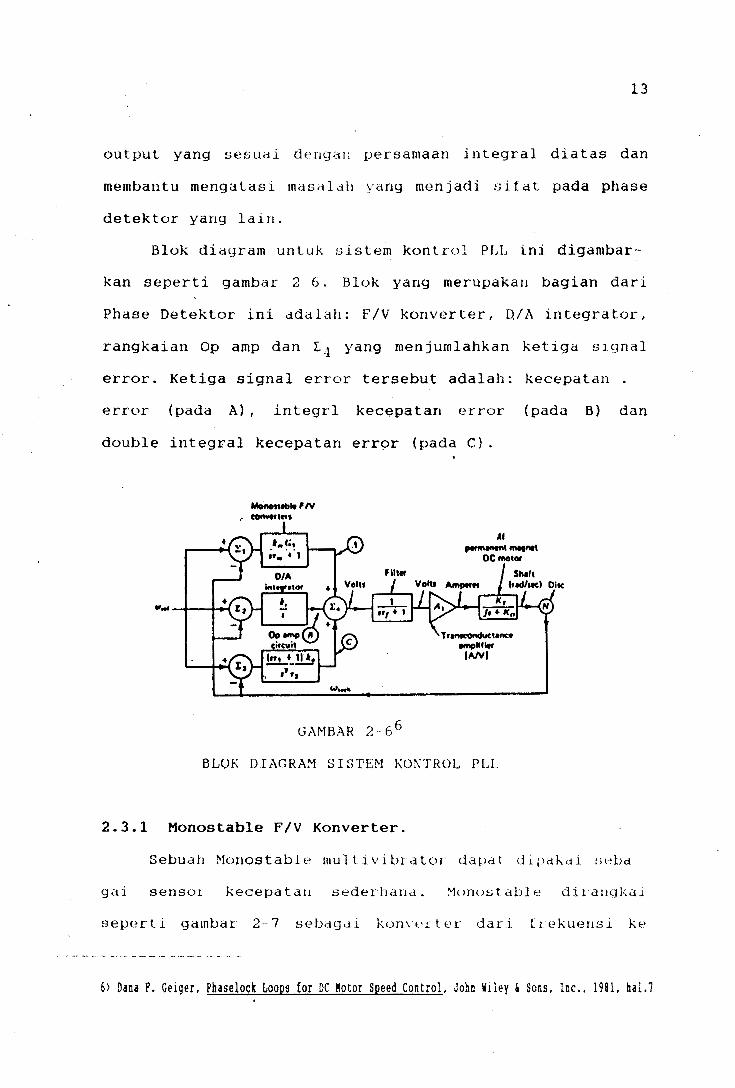
2.3.1 Monostable F/V Konverter.
Sebudf-1 Yo~~ostablt~ rnul t 1 v i b l (itor dapa t d l ibdhd 1 :;ebd
y a i sensor kecepa tall s e d e r h d l ~ d . ?lonos t dbl t. d l 1 dllgkdi
seper-ti gainbar 2 7 sehdgd L h v n \ c . 1 t chr d a r i 1 I c k u o r ~ s l he.
6) Dana P. Geiger, Pbaselock Loops for DC notor Speed Control, John Wliey C Sons, Inc., 1981, hal.7
vo l t age . U n t u h d d p d t menghasilkan konversl dari frekuensi
ke \?oltage, sigrlal persegi dinlasukkdn ke input TR' darl
mono. S e t i a p pusltive-going edge pada input TR' menyebab
k a r ~ terjadinyd p u l s d denyan lebar yang seragam pada
output Q (lebar = 1 ) .
Bila motor berputar dengan kecepatar i rendah, maka
frekuensi tachometer juga rendah dan input positive edge
ke TR+ juga j a r d n g muncul.
yang leBih tinggi, pvsi tive edge lebih sering muncul,
pass filter RC pads output rnorio mer~yl~asilkail kornporien DC
d a ~ i output Q . Komponen DC dari c~~it.put nier~lr~g),dt seband
ing dengan kecepatan, karena pulsa output yang dihasilkan
m a k i n rapat. Denqan nteriqarlcjgap high l e \ ?e l c.>utput dari
pulsa adalah Vcc dan low level adalall 0 \ mdkia,
7 ) Doebelin. Ernest 0, Control Syster Principles and Design, John Yiley 6 Sons, Inc., 1985, ha1.495
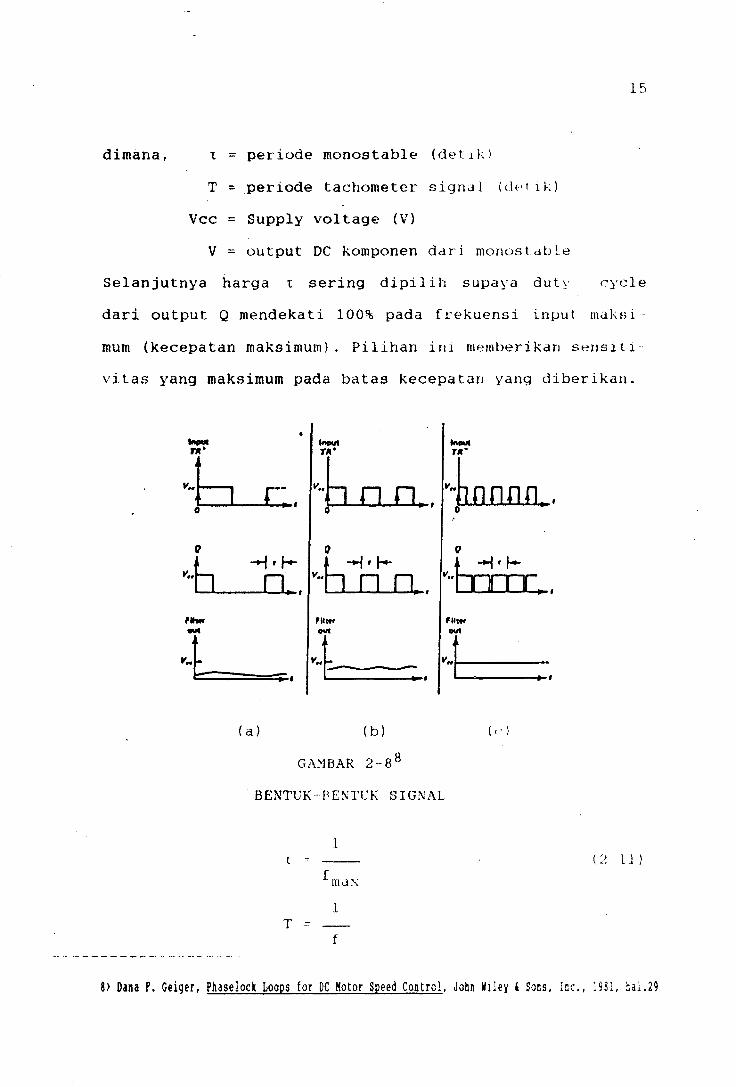
dimana, r = periode monostable ( d e t - l k )
T = periode tachometer s i g n d l ( t 1 t . t l h )
Vcc = Supply voltage ( V )
V = output DC komponen d d r i mnnostdble
Selan jutnya harga r sering dipil ih supa1.a d u t h , c y c l e
dari output Q mendekati 100% pada f rekuensi input a l d l i s i
mum (kecepatan maksimum) . Pilil~an i r ~ i rnernberikan sensi t i -
vi.tas yang maksimum pada batas kecepatar~ yany diberikan.
( a ) (b) ( r . )
Gh?lHAR 2 - 8 $
BENTUK--PENTUK SIGNAL
8 ) Dana P . Geiger, Phaselock Loops for DC Hotor Speed Contrc!, John Wiley k Sons, ! c c . , 1981, kai.29
maka P e r s . ( 2 - 8 )
F u n g s i t r a n s f e r u n t u k s e n s o r k e c e p a t a n t e r s e b u t a d a l a h :
d i m a n a , r m = RC = f i l t e r time k o n s t a n
- vcc kill - lwmax
Time k o n s t a n d a r i low p a s s 1 r d i p i l i h b e r d a s d r k a r i
d e s i g n s e r v o , p e m i l i h a ~ i i n i btll C I ~ I , ~ iiiig k e p a d a f r e k u e n s i
t e r e n d a h yang t e r j a d i , d ~ n ~ d r ~ ' ~ j t 1 c i . 1 1 ( > K ( J d t l t i I r l ( ] k f l r d p d t d n
(N) d a r i p i r i n g a n d a n k e c e p ~ i t dri t ebt t->r~ddh ( r n i nimurn) ~notol- .
pl 11 :s ip F/V k o n v e r t e r . R a n g k a i a t ~ s o t e ~ ~ a r n ) d ) ~ I I ( J cl.
y u n a k a n d a l a m b l o k diarj l~drn F/V k o n \ ' c r t e r ddri gd1nt)dr 2 6
a d a l a h menghendak i p e r n b a l ~ d i n g a r ~ d a r i d u a f r e k u e n s i f ,.,,f dari f tach u n t u k d a p a t m e n g h a s i l k a n s e h u a h t e g a n g a n yarlg
s e b a r ~ i l i ~ ~ y d e n g a n p e r b e d a a r i rnereka . Kdligkdian peiab~iridirty
nya a d a l a h p e n g u a t d e f e r e ~ i s i a l .
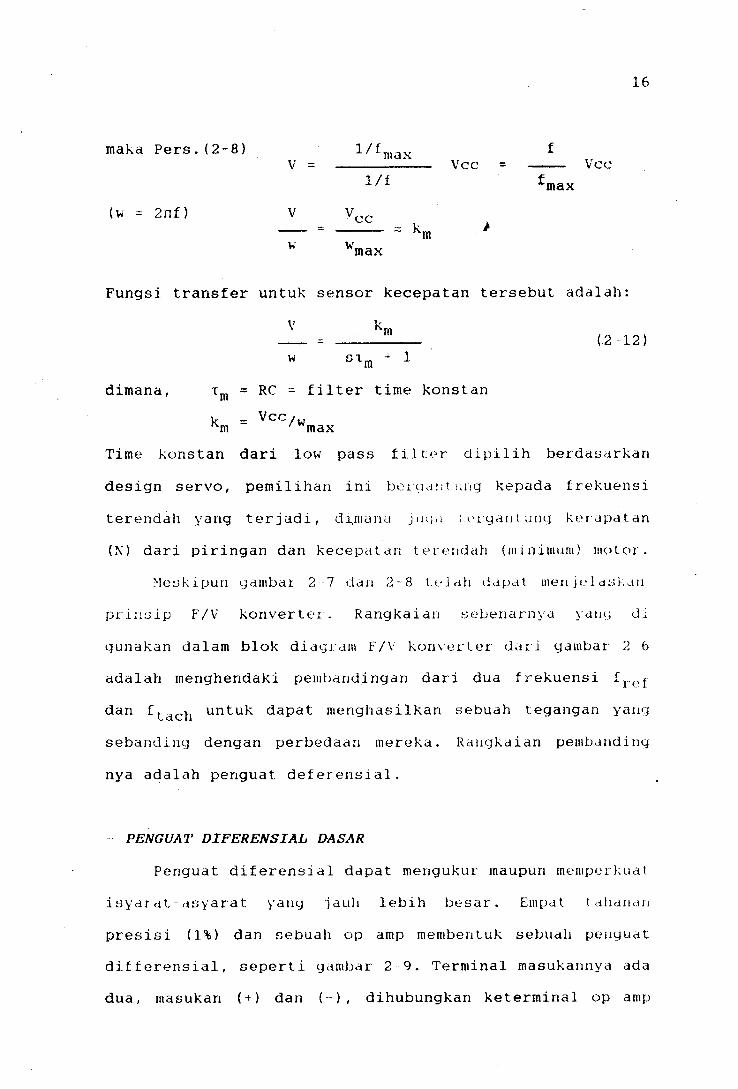
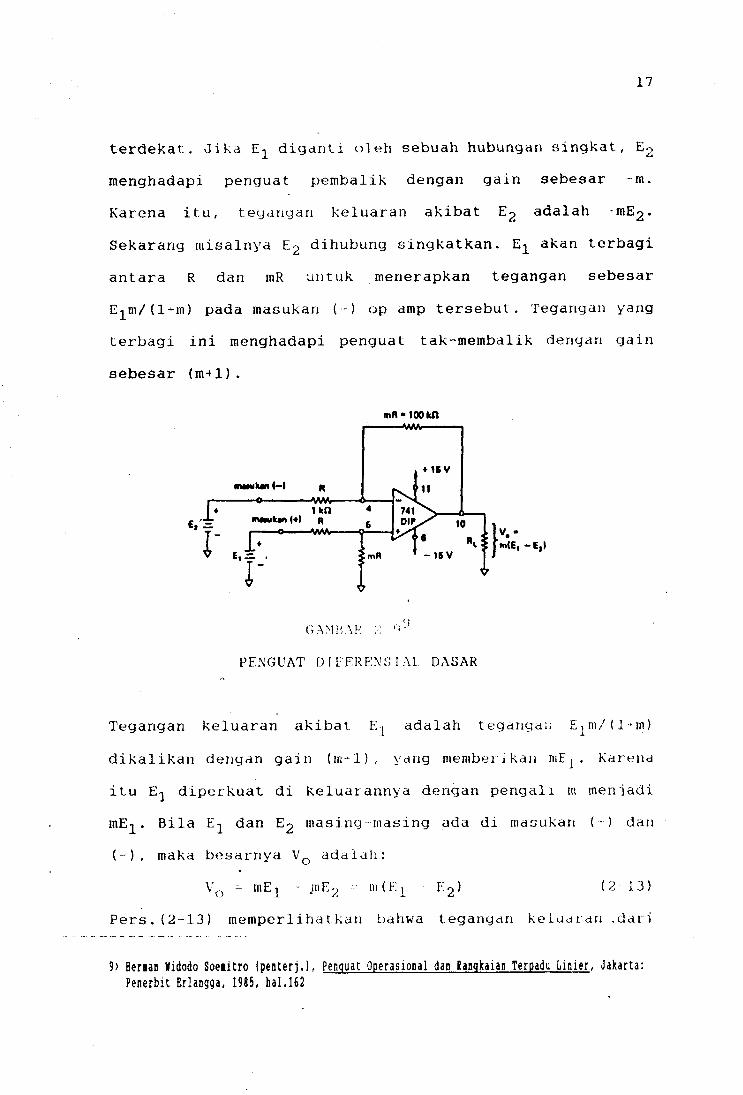
- PENGUAT DIFERENSIAL DASAR
P e r ~ g u a t d i f e r e n s i dl d d p a t mertgukur lnaupun mcn~yer-kud t
i s y d r d t - cisyard t yarig j a ~ ~ l i 1 e b i h besdr . Elnpd t t d11dr1dr1
p r e s i s i (1%) d a n s e b u a h OK:, amp meniberituk s e b u a h p e i ~ y u d t
d i f f e r e n s i a l , s e p e r t i gdnibdr 2 - 9 . T e r m i n a l masukar~nya add
d u a , rnasukan ( + I d a n , d i h u b u n g k a n k e t e r m i n a l op anip
terdekat. J i k a El d i y a n t i o l e h sebuah hubungdn s i n g k a t , E2
menghadapi penguat pemba l ik dengan g a i n s e b e s a r -m.
Karena i t - u , t e y , ~ r ~ q a ~ i k e l u a r a n a k i b a t E2 a d a l a h -mEZ.
Seka rang inisaln\ .a E 2 d ihubung s i n g k a t k a n . El akan t e r b a g i
a n t a r a R dan mR u r i t u k menerapkan t egangan sebesar
Elm/ ( l + m ) pada masuka~i ( o p amp t e r s e b u t . Tegariyan yang
t e r b a g i i n i menghadapi pengua t tak-membalik derlgnrl g a i n
sebesar ( m + 1 ) .
PESGUAT D 1 t EHENS T :lL D X S A R
Tegangan k e l u a r a n a k i b a t E-l a d a l a h teydr~yd: ; E l m / (1-mf
d i k a l i k a n derigan g a i n I 1 , ydng membel- ika~~ n1E I . l id1 e l l d
i t u El d i p e r k u a t d i k e l u a r a n n y a dengan p e n g a l l m men jad i
"El. B i l a E1 dan E 2 a ~ a s i n g niaving ada di rndsukarl dati
( - 1 , maka b e s d r n y a V o d d d l d t ~ :
= M E - . inE2 I I I ( E ~ E 2 )
P e r s . ( 2 - 1 3 ) memper l iha thdt i bcthwa tegarigdri k e i ~ d ~ d r l .dclri - . - - - - - - - * - -
9) Berran Yidodo Soeritro (penterj.1, Penquat Operasional dan Pangkaian Terpadu Linier, Jakarta: Penerbit Erlangga, 1985, ha1.162
peguat diferensial, V, sebanding dengan perbedaan tegangan
yang diterapkan ke masukan ( + ) ddll masukan ( - 1 . Pengali m
disehut gain diferensial dan ditentukan oleh perbandingan
tahandnnya.
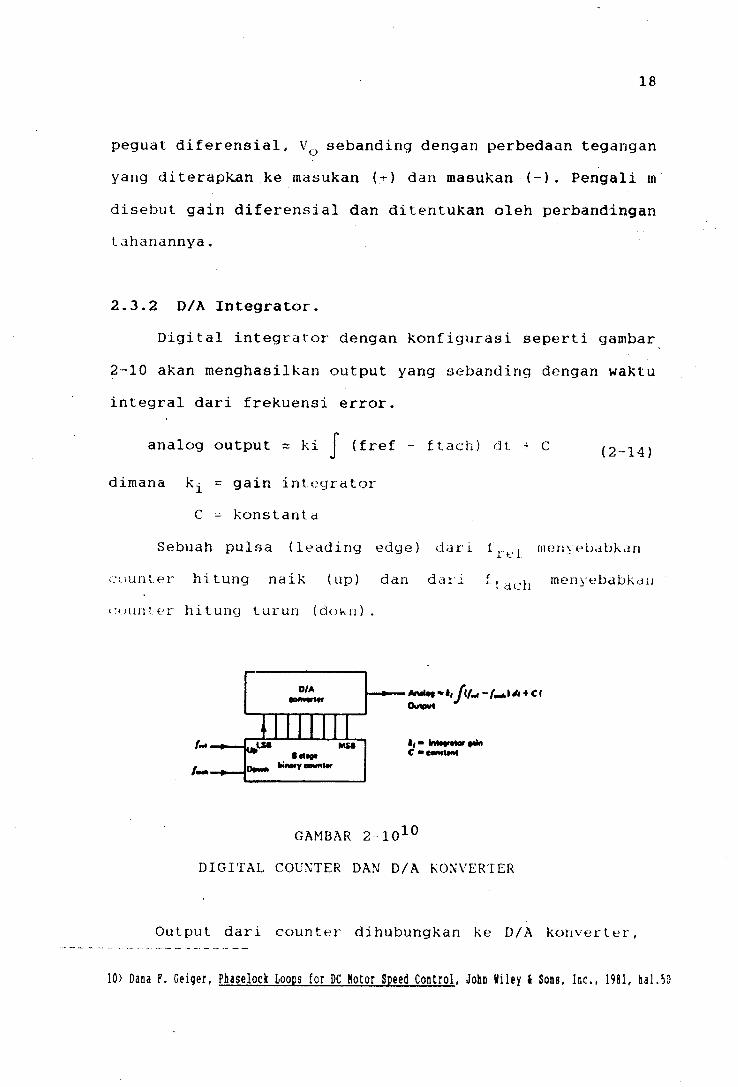
2.3.2 D/A Integrator.
Digital integrator dengan konfigurasi seperti yambar
2-10 akan menghasilkan output yang sebanding dengan waktu
integral dari frekuensi error.
analog output = ki I (fref - ftacki) d t + c (2-14)
dimana ki = gain integrator
Sebuah pulsa ( l e a d i n g e d g e ) r l ~ j r . ~ f l.t.l I I ~ C I I ) ~ 1 h ~ b h d 1 1
L . r ) u ~ i t c . r hitung naik ( u p ) dan ddr i i dc:ll rne~i~ 'ef>abk, i~~
GAMBAR 2.- 10''
D I G I T A L COUNTER DAN D/A KON\'ER'TER
O u t p u t dari counter dihubungkan ke D/A k o n v e t - t e r , - " " - . - - - - - - - -
10) Dana P. Geiger, Phaselock Loops for DC Hotor Speed Control, John Yiley f Sons, Inc., 1981, ha1.50
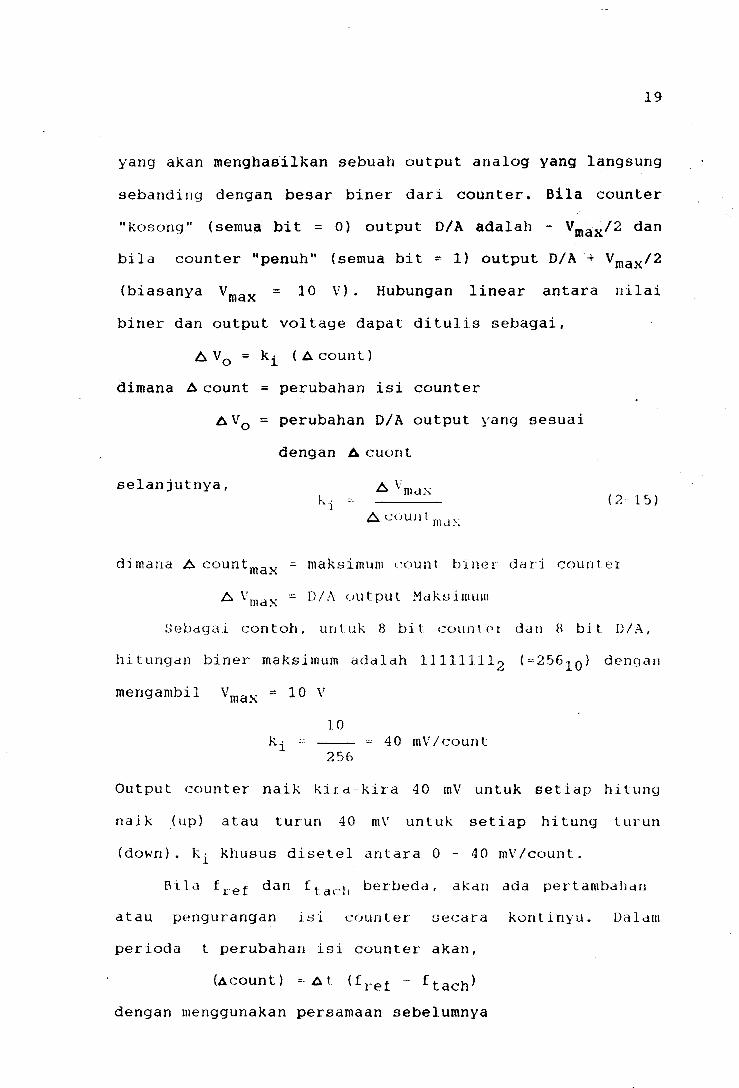
yang akan menghasilkan sebuah output analog yang langsung .
sebandi~iy dengan besar biner dari counter. Bila counter
"kosong" (semua bit = 0 ) output D/A adalah - Vmax/2 dan
blld counter "penuh" (semua bit = 1) output D/A + Vma,/2
(biasanya Vmax = 10 V). Hubungan linear antara 11ilai
biner dan output voltage dapat ditulis sebagai,
AVO = ki (Acount)
dimana Acount = perubahan isi counter
A V O = perubahan D/A output 1-ang s e s u a i
dengan A cuont
selanjutnya, A \ . n l d s
hi Z.
A ~ o u l l t
A YnldN = 17/:;1, output , Y d k ~ i l l l ~ n l
2ebdg.t i contoh, u r ~ t l:h 8 b i t cc)iillt t .r ddtl 8 b i t I)/:J,
h i t u n g d n biner maksimum adalah 111111 1 l2 (=25G10) dr?nc_rd~-I
mengambil VmaX = 10 iT
O u t p u t counter naik kird-kira 40 rnV untuk setiap h i t u n y
r i a i k ( u p ) atau tururi 10 nil' u n t u k setiap hituny t i l l - u n
(down). k i khuvus disetel ar~tara 0 - 40 mV/count.
B i l a fief dan f berbedd, akdll ada pertambdhdn
atau penyurarigdn lsi counter. secara kolit in5.u. D a l d m
perioda t perubahan isi counter akan,
( A C O U ~ ~ ) = ~t (fief - ftach)
dengan nienggunakan persamaan sebelumnya
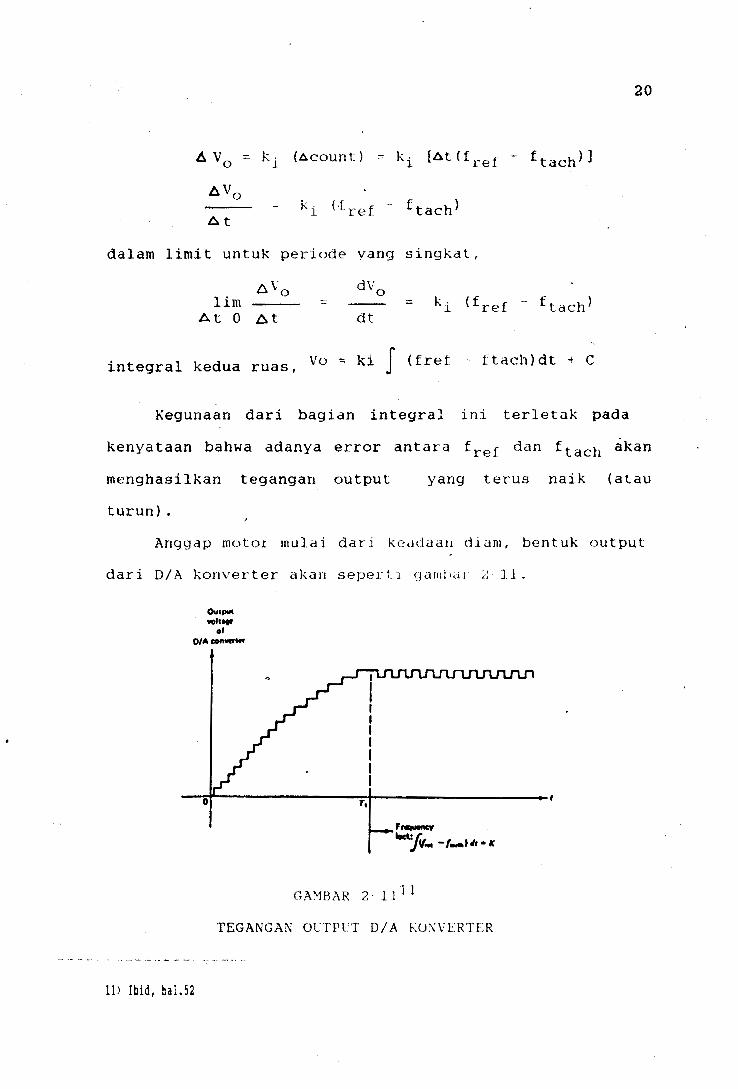
dalam limit untuk periode yang singkat,
dV0 fLLo l i m = - - - ki (fr,f - ftach 1
A t 0 At d t
integral kedua ruas, Vo = ki J' (fret - ttachldt + C
Kegunaan dari bagian integral ini terletak pada
kenyataan bahwa adanya error antara fief dan ftach akan
menghasilkan tegangan output yang terus naik (atau
Anggag ~nc.>tux n~uldi dari kec t t l i t a l ~ d i d m , bent uk c~utput
dari D/A korlverter aka11 sepel t J gdrri11.l: L! 1 1 .
- - . - - - - - - - - -
11) I b i d , ba1.52
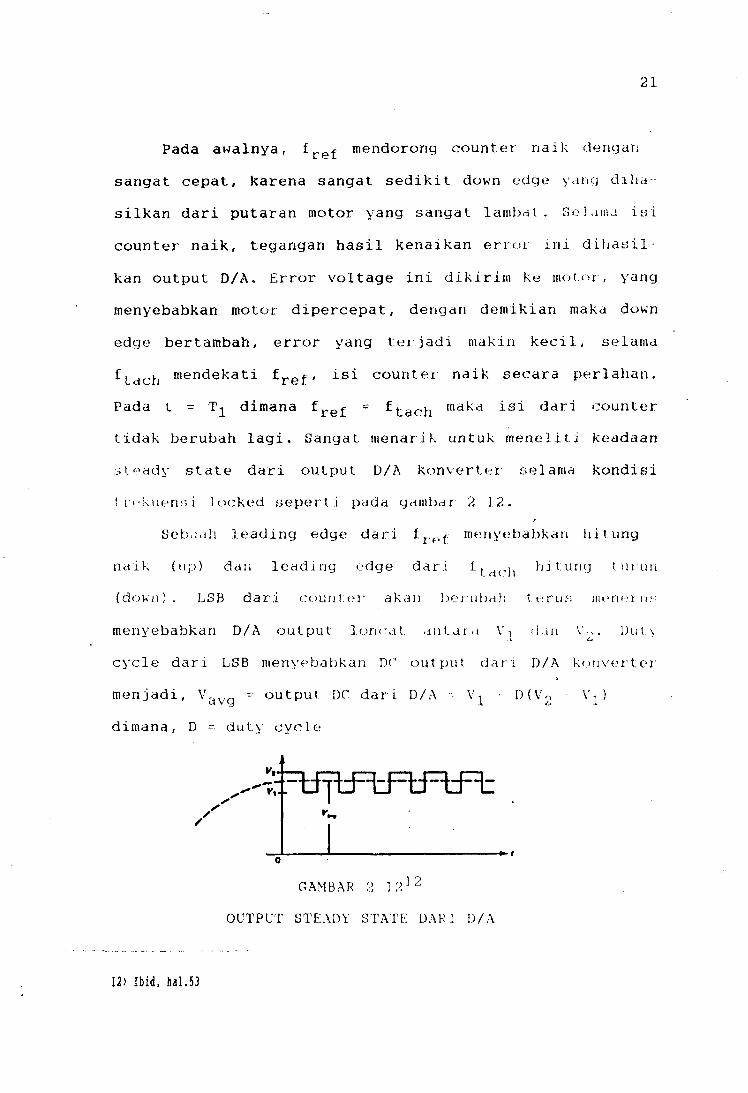
Pada awa lnya , f rneridorong c o u n t el- n a i h tlencjdr:
s a n g a t c e p a t , k a r e n a s a n g a t s e d i k i t down edge ).,-rrtcj d i l ~ d -
s i l k a n d a r i p u t a r a n motor yang s a n g a t larntjdt. I i s i
c o u n t e r n a i k , t egangan h a s i l k e n a i k a n errol i n i d i l ~ a c i l -
kan o u t p u t D/h. Error v o l t a g e i n i d i k i r i a l ke n~otcbr, yany
menyebabkan motor d i p e r c e p a t , derkgdrl dernikian rnakcr down
edqe be r t ambah , e r r o r yarig t e r . j ad i n~dkiri kecil, selaala
tclct1 mendeka t i f , is i counter - n a i k s e c a r a p e r l a l i a n .
Pada t = TI dimana f,,f = ftach rndkd i s i d a r i c o u n t e r
t i d a k be rubah l a g i . Sarigdt r~ienar i h un tuk menelit i keddaan
' s t clad\. s t a t e d a r i o u t p u t D / A k o n v e r t e r :.;elarnir k o n d i s i
! I ! i l (x:kcd :;epet.t i pddd C J ~ I I ~ ~ J J I 2 1%.
S e t ; t ~ t r l ~ leading edge d a r i f r 6 , f rnc\tl yebd11ka11 1 1 i t urly
n a i f.; I d d ~ l l e a d 1 n g edge d a r i 1 t.d( . l l 111 t 111rcl t 1 1 1 clri
o h I . LSB d a r i I I I a k d l i 1 I ! I t--r.~~!-; I I I ~ > I I ~ ~ ~ 11::
meri\'ebabkdri D / A (output l o . i r i t c i ~ . i \' I r i , t r i - . l l r r t I .
c y c l e d a r l LSB n~en)~c.babkan Dc' o u t ~ L I t t ld t 1 D/ .4 k. ;c)~t~,~)r- t el-
m e n j a d i , V a v g = ou tpu t Uc d a r i D/.! - I ) ( L ; ~ (A \ ( ] )
dimana , D = d t t t . ~ cyclc :
GA?IBAR 2 1 % '
OUTPUT STE:A-lr>k STATE L). lP1 i ) / . l
12, I b i d , ha1.53
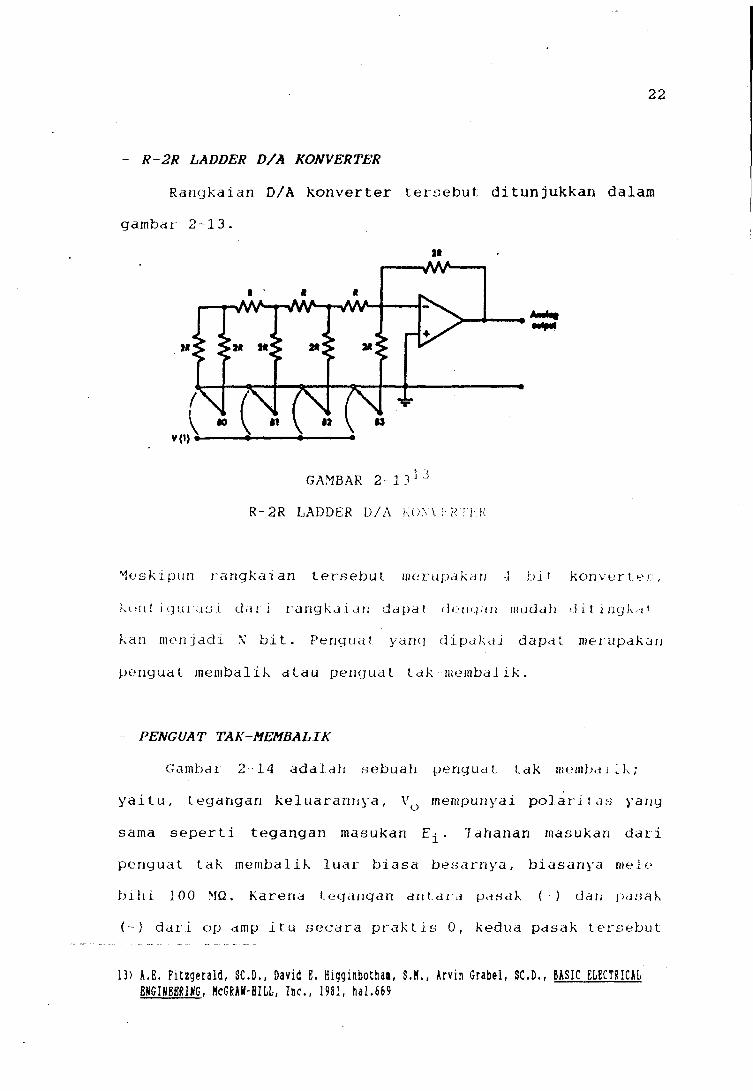
- R - 2 R LADDER D/A KONVERTER
Ran(]kdlan D/A k o n v e r t e r t e r s e b u t ditunjukkan dalam
gambar 2-13.
Yeshlyun ~ - a n g k a l an t e r s e b u t I 1 1 ~ 1 t k v ~ ~ v e r t Y J ,
h i f 1 I I 1 t l d t 1 ~'drlyhd 1 d r ~ d d p d 1 I I ~ ~ [ I ( { ~ ~ I I r ~ ~ t ~ d d l ~ 1 1 i t 1 I I ( ~ I , ( I I
A d 1 1 I I I C ~ I I j a d i N bit. Ferlyuc~t lrctncj <lipdl;,ri dapd t rnt.r-~~p.lk,jrl
p ~ r l g u d t membdlih a t a u p o ~ ~ g u a t t d k 111clnbd1 lk.
- PENGUAT TAK-MEMBALIK
c;arnhar 2 1 4 d d d l a t ~ :;ebudil penyud t t a k ntel~lb~j 1 ~ h ;
y a i t u , t egangan k e l u a r a n r ~ l , a , \', memputl\.al p o l a r i t ~r:; )-ally
sanla seper t i t e g a n g a n masukan Ei . Sdhanan ~rtasukari dar i
perlgudt t a k mernbdl i h l u a l b i a s a be:;arnlra, b i a s d r ~ \ . a I I I P ~ I ,
i> l 11i L O O Y Q . K d r e r l d t ey<-iIlydri d n t dl ,i p, isah ( tfari 1)d:;ah
( - ) d a r i or) dmp i t u secdrd p r a k t j s 0 , k e d ~ r a p d s d h ter .<:ebut - - - - - -
13) A.E. Fitzgerald, SC.D., David E. Higginbotha~, S.H. , Arvin Grabel, SC.D., BASIC ELECTRICAL ENGINEERING, HcGRAW-BILL, lac., 1981, ha1.669
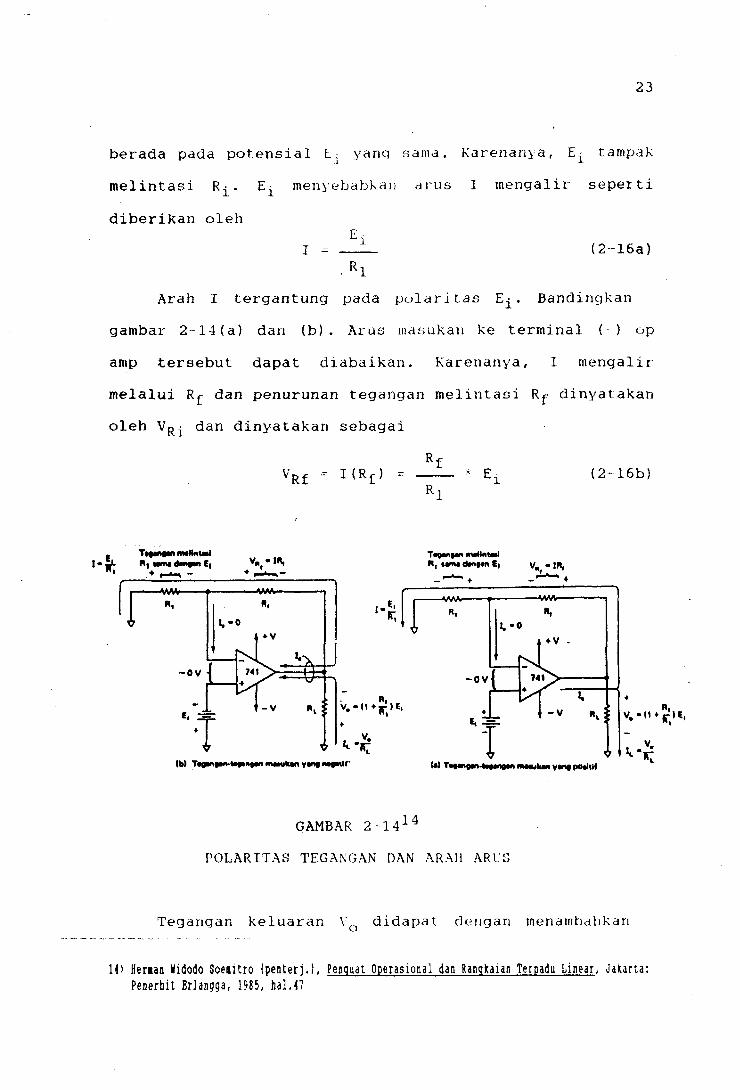
berada pada potensial t i yanq sarna. Karenanl-a, Ei tampak
melintasi Ki. E i me~?\.ehdhhd~~ d l - u s I lnengalir seperti
diberikan oleh E .
1 I = -
R1
Arah I tergantung pada p o l a r i t a s Ei. Bandingkan
gambar 2-14 (a) dan (b) . Arus l~ldsukail ke terminal - ) c,p
amp tersebut dapat diabaikan. Karenanya, I mengalir
melalui R f dan penurunan tegangan melintasi Rf dinyatakan
oleh V R i dan dinyatakan sebagai
GAMBAR 2--1414
POLARITAS TEGANGAK DAN A R A H ARCS
Tegarlgan keluaran \ d i d a p a t dellgan lne~lalnbd~~kdrl - - - -. - - - - - - -
14) Kerran Vidodo Soer i t r o ( p e n t e r j. 1 , Penquat O ~ e r a s i o n a l dan Ranckaian Terpadu Linear , J a k a r t a : P e n e r b i t Erlangga, 1985, ha l .47
penurunarl t e g a n g a n m e l i n t a s i R1, yang a d a l a h E i , h u
t e g a n g a n m e l i n t a s i R f , yang a d a l a h V R f :
a t a u
Dengan rnenyusuri kemba l i P e r s . ( 2 - - 1 7 6 ) un tuh nletl\'dLdkdrl
g a i n tegangann) .a , k i t a d a p a t k a n
A r u s btlhatl IL d i b e r i k a n o l e h V , , / H L ddrl kdr'endnya
hanya tt :r cjdntung [)add L o ddri R1 s a j a . Iv a d a l a h drus 'yang
tnenga l i r d d r i h ( ~ ? t ~ a r a n o p amp, diberikan o l e h
l (> - i + I , , ( 2 - 18)
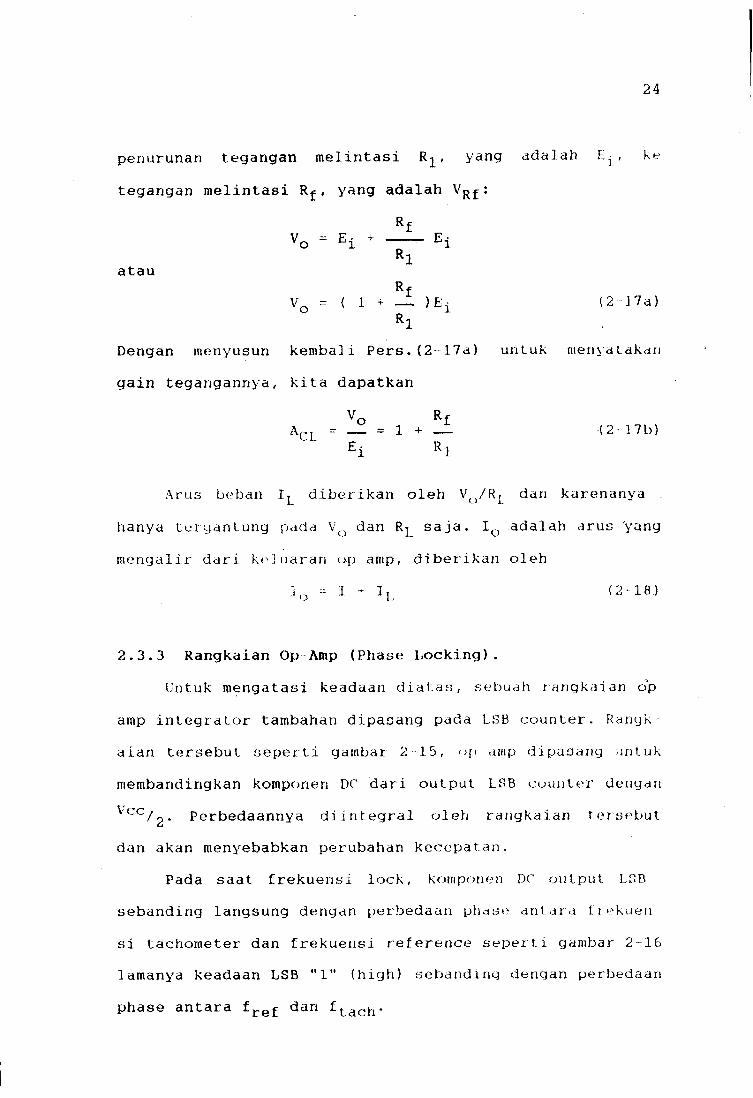
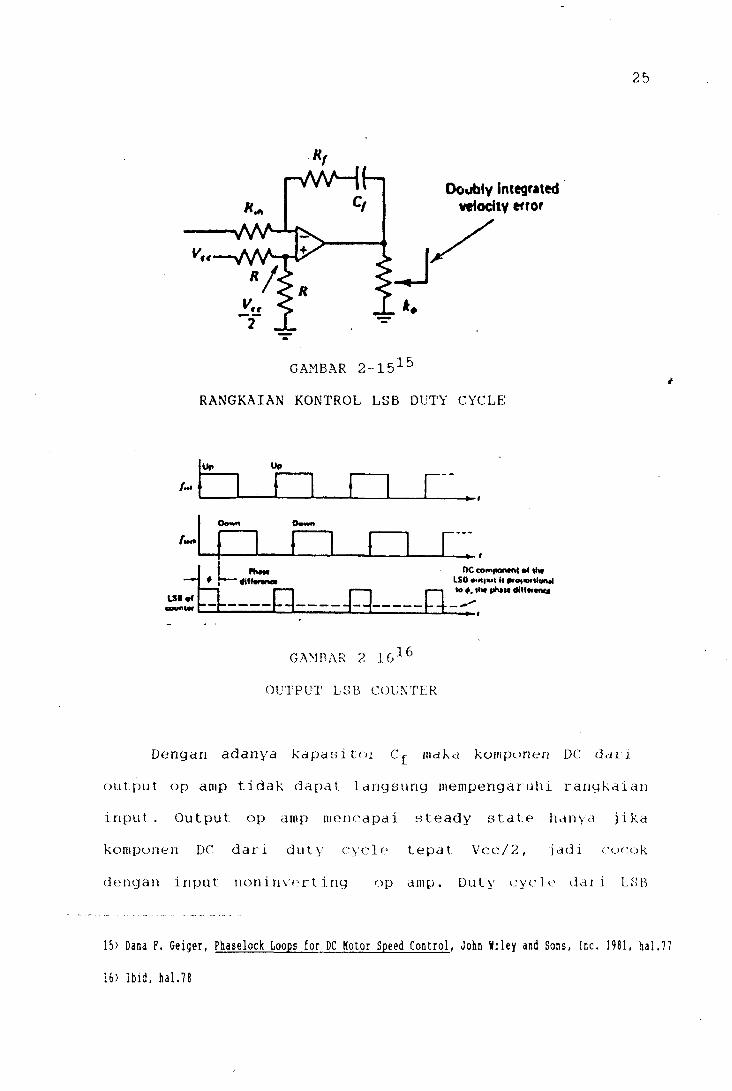
2 . 3 . 3 Rangkaian O p Axnp ( P h a s e L o c k i n g ) .
I,'ntuk m e n g a t a s i keadaan d i a t - a s , sebudh r angkdi a n c5p
amp i n t e g r a t o r tambahari d l p a s a n g pddd LSB c u u n t e r . RdIIqk-
d i a n t e r s e b u t s e p e r t l CJdmbar 2 1 5 , 01' <ialp dipasdrig l l r ~ t u h
membandingkan komponen DC dd r i o u t p u t LSB c:uuii t ~ 1 - denqari
Vcc / 2 . Perbedaannya dl l n t e g r a l ole11 r d ~ i y k a l a n t c r s e b u t
d a n a k a n menyebabkan perubahdn k e c e p a t d n .
Pada s a a t f r e f t u e n s l l o c k , homporien DC 0 1 1 tpu t L S B
sebar id ing lar igsung denydn perbedaar i p 1 1 ~ 1 s t l d r i t d r ( 3 f I e>hcte~i
si t a c h a m e t e r dan f r e k u e ~ ~ s i r e f e r e n c e seper t 1 gdn~bar 2 -16
lamanya keadaan LSB " 1" ( h i g h ) sebdndlr iy deriqan perbedadn
phase a n t a r a fief d a n f t a C t , .
OoJbly integrated velocity utor
GAMBAR 2 - 1 5 1 5
RANGKAIAN KONTROL L S B D U T Y CYCLE
I I 1 I I --- fun
I 1
Dengan adanyd k d p d s i t o l C f mdhd kornpc)nell DC' dcir i
o u t pu t op anlp t i d a k d a p a t l d ~ i g s u l ~ g nlernpengaruhi r a r ~ c ~ k a i a r l
i n p u t . O u t p u t 01) amp n~t?~lr'dpdi Y t e a d r : ; tdt t> i ~ d l i \ CI j 1P.d
kompor~t-11 L)(' da r - i d i ~ t 1' 1 t e p d t \ ;cc /2 , jdtl I ( . o c - o t ;
dellgat1 Input . ~ t o n i r i \ . f > r t i r ~ c j oy dlnp. D u t y c-yc71 t> 1 I.Sl3
15) Dana F. Geiger, Phaselock Loops for DC Kotor Speed Control, John Yiley and Sons, !nc. 1981, hal.77
16) Ibid, hal.78
h a r u s t e p a t 50% s u p a y a t e r j a d i d e m i k i a n . O u t p u t d a r i op
anip a k a n mendorong motor s u p a y a d u t y c y c l e d a r i L S B 50%.
O u t p u t d a r i o p amp a k a n h e r h e n t i b e r u b a h h a n y a j i k a d u t l
c y c l e m e n c a p a i 50%.
K e n y a t a a n bahwa r a n g k a i a n o p amp tambdhdn l a n g
niembuat duty c l c l e 50% p a d a LSB menyebabkan hubungan 180"
a n t a r a f r e k u e n s i r e f e r e n c e d d n tdchon ie te r . . I n i t e r l i h a t
p a d a gambar 2 -10 , d i m a n a mcriunjukkan d u t y c y c l e d d r i LSB
k i r a - - k i r a 25%, b i l a d u t y c y c l e n a i k m e n j a d i 50%, p h d s e
d a r i t a c h o m e t e r d a n re fe re r l cc - iic.1-beda 180°. J a d i kedua
s i g n a l b e n a r - b e n a r p h a s e l o c h r ~ d d d 180" .
2 . 3 . 4 P e n j u m l a h Tak-Membalik.
R d n y k a i a n yang d : quliakdri p,itl.i L m c r a p ~ ~ k c t r ~ I dr1yh.1 l,in
pel1 ) u m l a h . Anal l s a d a r i r cd r~ykdi ,ti1 d d a l a h s e b a g a ~ twr 1 k ~ i t . J i k a l e b i h d a r i duct L:;\ d r , i t ~ n ~ i a u k d n }.ciriq h d ~ [ I : ,
d i ju rn lahkan , maka d i b u a t serai1d t a l ~ a r ~ a n n y d sdm,i kticudl I
t a h a n a n umpan b a l i k R f . U n t u h tiya masukan s e p e r t l dal<im
gdmbar 2 - 1 7 .
R f d i b u a t sama dengan
R f = ( n 1 ) R ( 2 1 9 )
d imana n a d a l a h b a ~ i y a k n y ~ ~ nldsukan.
S e k a r a n g Ei a d a l a h jumlah t e g a n g a t l - t e y a n y a n ma:;uIiall~~).d
d i b d g i d e n g a n banyaknq'a rnasukar~ i t u (toy<4ncjdn ~ I I ~ ~ : ; I I ~ , , ~ I I
r a t a - r a t a ) . Kemudian g d i l i yerlguat t e r s e b u t sdrnd detlgdll
banyakriya ladsukan. Karend.nyd, Vo men jumlahkdn t e q a n g d n
t e g a n y a n masukannya .
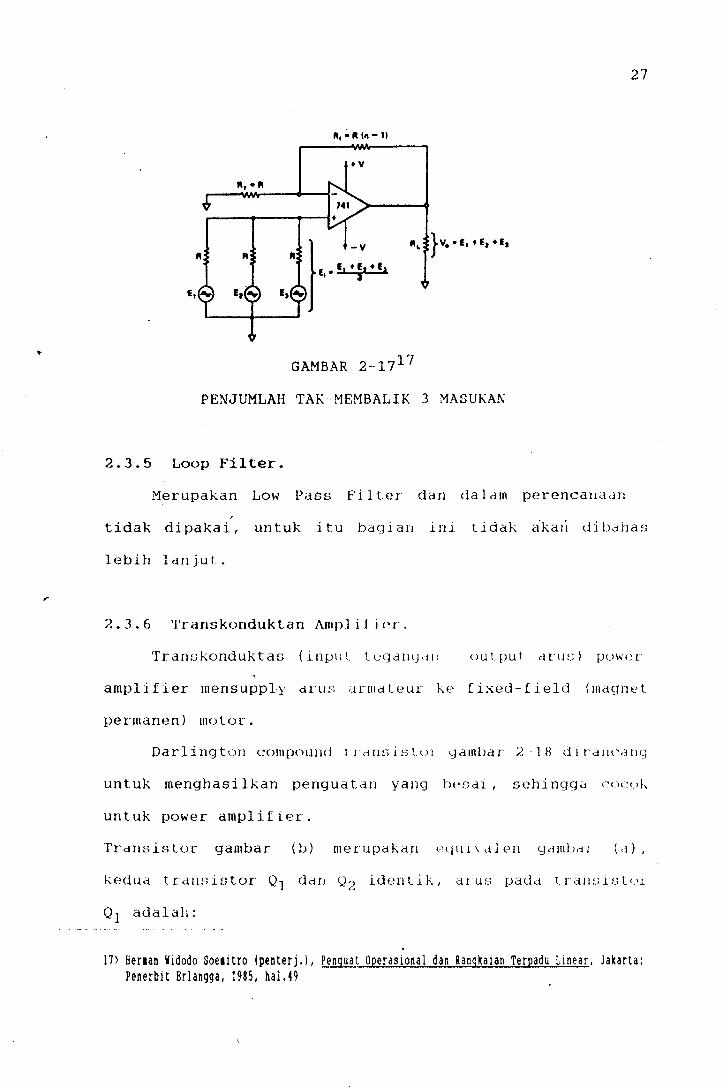
GAMBAR 2-1717
P E N J U M L A H T A K - - M E M B A L I K 3 MASUKAX
2.3.5 Loop Filter.
Merupakan Low Pass F i 1 t e r d a n ddldln pe1-encarldd11
tidak d i p a k a i , u l i t u k i t u b d g l a l i 1 1 1 1 t i d a h a k a ~ i d i l ~ d i l a s
l e b i h l a ~ i j u t .
2 . 3 . 6 l ' r anskor iduk ta r i Antpl i t i c3r.
T r a n s k o n d u k t a s ( i np l i r t c : c l a ~ i ( j ~ i ~ ~ o u t p i c t I I ) powctt
a m p l i f i e r m e n s u p p l y ar u:; dru id t e u i kt> f i s e d - f i e l d (rndgnet
p e r m a n e n ) nlotor.
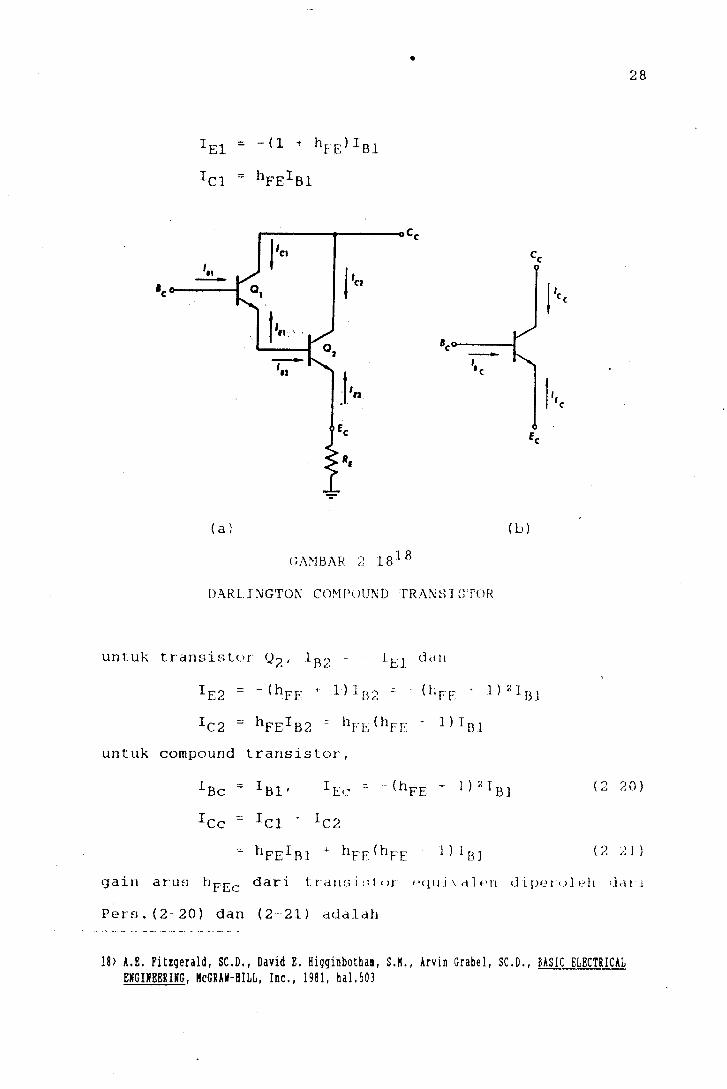
D a r l i n g t o 1 1 cc)rnpou~ici t I dr is i :; t 0 1 gd~nbdr 2 18 d i r d ~ i c ~ ~ ~ ~ i c j
u n t u k m e n g h a s i l k a n p e n g u a t a n y a n g h t l sd l , s e h i l ~ q g . i (-(-)(-oh
u n t u k power a m p l i f i e r .
l i edud trci~l:;istor (2) dd11 Q., i d e n t ili, us pddd t r d11:;1s to : i r
17) H e r m a n Yidodo S o e l i t r o (penterj.1, Penguat Operasional d a n Ranqkalan T e r p a d u Linear, Jakarta: Penerbit Erlangga, 1985, hal.49
- a=c
J lc,
I,, __._c
'co I I- ll,,. ~ -
'.a
u n t u k compound transistor,
IBC = IBI' I . = ( h F E * l ) z ~ B 1 (2 2 0 )
Icc = Ic1 * Ic2
= hFEIB1 h F F (hFE l ' (2 d l f
yaili arus hFEc dari t r d l i s t : i t o r I \ I 1 I 1 I ri.-11 i
Pers.(2-20) dan (2-21) d d d l d h - . - - - - - - - * - - - -
18) A.E. Pitzgerald, SC.D., David E. Higginbothaa, S.H., Arvin Grabel, SC.D., BASIC ELECTRICAL ENGINEERING, NcGRAV-BILL, Inc., 1981, ha], 503
Ur~tuk llFE = 100, nilai dardari hFEc = 10200, keuritungan dari
r-drigl,dian ini adalah untuk arus base yang kecil dapat
dihasilkan arus colektor yang besar, sebagai contoh untuk
IC, = 1 n1A dihasilkan hanya dengan n i l a i IB, = 100 nA.
3 . MIKROPROSESOR 280
3.1 Arsitektur 280 CPU
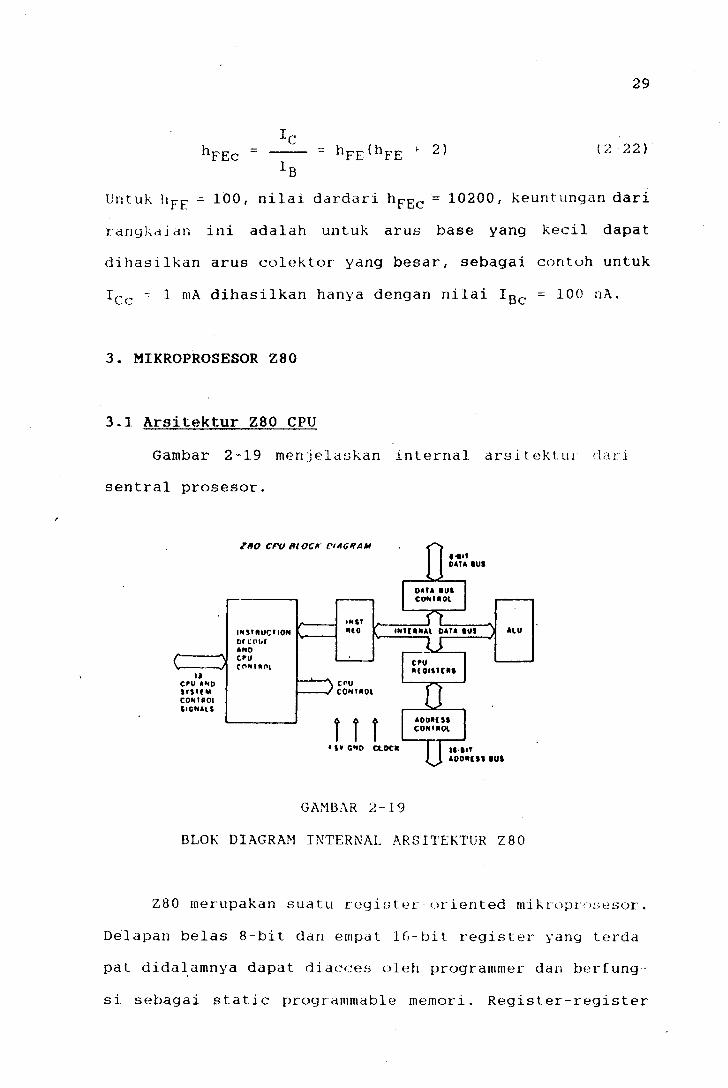
Gambar 2-19 men jelaskan internal arsi t ekt 111 f i s ! l i
sentral prosesor.
BLOK DIAGRAM INTERNAL ARSITEKTUR 2 8 0
Z80 merupakan suatu r eyistu~ 01 ierited m i h ~ opr o:;c-.u(x . Delapan belas 8-bit dark enipdt 16 bit register ydny terdd-
pat didalamnya dapat diacce:; c ) l e f i progranimer dar~ berf ung -
si sebagai static proyraemable rnemori. Register-register
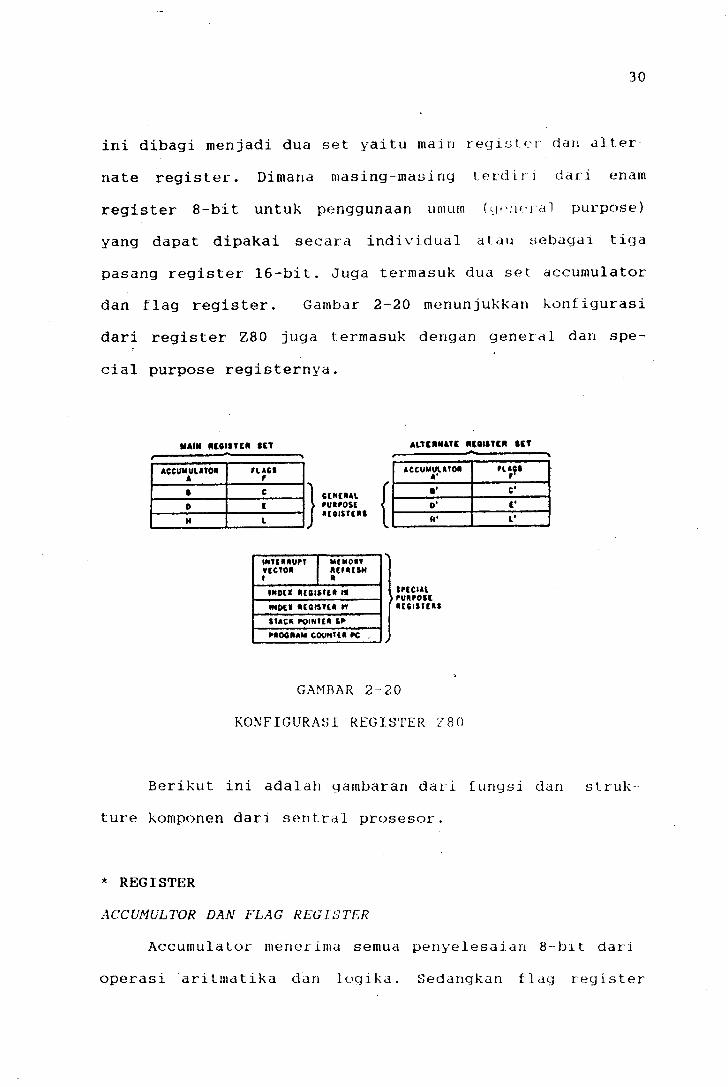
ini d i b a g i m e n j a d i dua s e t y a i t u maln r e g i s t e l - da11 a l t e r -
n a t e r e g i s t e r . Dimarid masing-masiriy t c r d i~ 1 d d r i erlain
r e g i s t e r 8 - b i t u ~ z t u k penggunaan u m u ~ ~ I I purpose)
yang dapat d i p a k a i s e c a r a i n d i ~ ~ i d u a l a t a u s e b d g d l t i y a
pasang r e g i s t e r 1 6 - b i t . Juga t e rmasuk dua se t accumula to r
dan f l a g r e g i s t e r . Ganlbar 2-20 menun jukkan k o n i i y u r a s i
d a r i r e g i s t e r 280 juga t.ermasuk dengan g e n e r a l dan spe-
c i a l purpose r e g i s t e r n y a .
GAMBAR 2-20
KONFIGURAS l REGIS'TER 7 8 0
B e r i k u t i n i a d a l a l ~ yambaran d a r i f u n g s i darr s t r u k
t u r e komponen d a r l s e n t r a l p r o s e s o r .
* REGISTER
ACCUIYULTOR DAN FLAG KEG1 STER
Accumulator rnenerin~d semua per iyo lesa la r l 8-hlt d a r l
o p e r a s i a r i t a a t i k a darl 1oqiI.ra. Sedariqkan i l d y r e g i s t e r
menulijukkan k e j a d i a n spe! ; . ! ;~ t lk d a r l k o n d i s i l o g l k d a t a u
a r i t m a t i k a dalarn p r o s e s o r : ; t h p v r t I p d r i t y , z e r o , s i y n ,
c a r r y dan o v e r f l o w .
GENERAL PURPOSE REGISTER
Ada dua s e t g e n e r a l p u r p o s e r e g l s t e r yarlg s e r u p d .
Main r e g i s t e r s e t b e r i s l enam 8 - h i t r e g i s t e r B, C , D , E , H
d a n L. A l t e r n a t e r e g i s t e r juya b e r i s i enam 8 - b i t r e g i s t e r
B ' , C ' , D ' , E ' , H ' d a n L ' . Untuk o p e r a s i 1 6 - b i t , r e g i s t e r
ini d a p a t d i b e n t u k s e b a g a i pasanyan 1 6 - b i t (BC, D E ? HL
a t a u BC', D E ' , H L ' ) .
SPECIAL PURPOSE REGISTER
1. PC (program c o u n t e r )
Progranl c o u n t e r b c r i a i s cbuah dlamd t 1 6 - b i t ddlanl
d d r i i n s t r u k s i , PC coun t c.r dk(r11 t ) ( > 1 t . I I I I I I I ! ! 1 !.'i p r O ( ~ I <tIIi
melakukan p r o s e s lie b y t e h e r 1 k u tr11.a d<i1d111 ! n t 1 m r l 1 1 . 'It c r l l I :;I
PC yang s e k a r a n g d i g a n t i dcnclan n i ldi 1 ) ' i ~ 1 1 , j I kd st!L)l-~dh
i n s t r u k s i jump a t a u c a l l F ( i n y dleh::c~hctsikdr~.
2 . SP ( s t a c k p o i n t e r )
S t a c k a d a l a h d a e r a h yallg d i p e s a n ddrl beherapd I o k d s l
memori, yang p a l i n g a t a s d l t ~ t n j u k k a n dengan i s i d a l l : : tack
p o i n t e r . L o k a s i memori d i o r g d n i s a s i k a n s e b a g a l f i l t > ).allrj
t e r a k h i r masuk, f i l e yanq p ~ l ' t a a i a I i t . l ~ ~ d ~ - . Dt>ngart 111el ifla t
rnasukn1.d tldlani s t a c k , cell t r cr1 p r o s e s o l dkd11 he~nbal i Re
program u t a~rld t dnpa nremperhdt i k d n hedaldmdn s u b r o u t i n e .
IS DAN I Y INDEX REGISTER
Kedudrlya merupakan 16 - b i t r e g i s t e r ydrig masing ~ndsirlg
b e r d i r l s e n d i r i u n t u k nienyimpan s u a t u n i l d l qang digunakari
da lam i n d e x a d d r e s s i n g mode, yang menunjuk pada l o k a s i
dalam memori dimana berhubungan dengan d a t a yang d i s i m p a n
a t a u d i a m b i l .
* ARITHMATIC DAN LOGIC U N I T (ALU)
M a n i p u l a s i a r i t m a t l k d a n o p e r a s 1 l o g i k a 8 b l t d l l a k u -
kan dalam 280 ALU. A L L be rkomunikas i s e c d r a i n t e r n a l
dengan r e g i s t e r s e n t r a ? p r o s e s o r d a n t i d a k d a p a t ldngsur~g
d i a c c e s o l e h progranimc~r . Opclrasi yang d i l d k u k n ~ i dnlam ALI:
~ n e l i p u t i : l e f t t i I lql-it s h i f t , i n c r e m e n t , d c c - r e ~ r ~ e n t ,
a d d , s u b t r a c t , I , or , c ~ ~ . ( - l u s i v e o r , cornpar t-_. , s e t b i t ,
r e s e t b i t , t e s t bit.
+ INSTRUCTION REGXS1'I;'K 1)AN SENTRAli PKOSESOR KON'I'ROI.
I t i s t r u c t l u n reg1 st (21 lac!rl) lnipdrt i u i ddr I 101,~-1::1 I I I~ : I I IOI I
yang d i t u n j u k k a ~ ~ ole21 I-'(' dar; diriiuat selarnd y r0s t . s p e l ~ c i d l n
b i l d n d a r i s e t i d p i r l s t l u k s l . S e n t r a l prosesol k u n t l o i ~ ( 1 1 1 t
melaksanakan f u n g s l yariy d i d e f l n i s i k a n ulei ! 111s t r u k s i
ddldm i n s t r u c t i o n r eg i s te r tlari n , enyhas i lk~ i r l s r Jn l i ln 1,0111 r o l
s i g n a l yang p e n t i n g un tuk d ik i l - im ke r e g i s t e r ) .<ng t e p a t .
3.2 Hardware 280 CPU
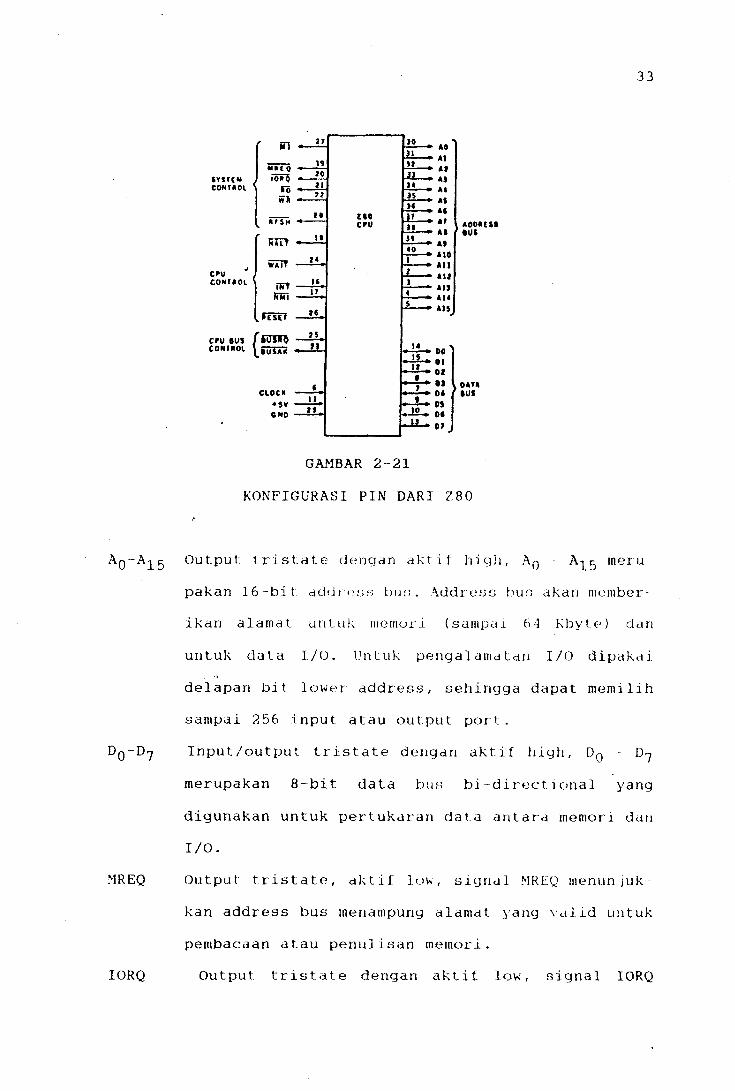
Garnbar 2 2 1 , menu11 jukhan det d i l cld1.1 ~ L I I 1 1 1 1 1 [ H O ,
jumlah k a k i d a r i 280 adaldi.1 30 p i l l . F u r ~ g s l d d r l I I I ~ > ; ~ I I ~
n ~ a s i n g p i n akan d i j e l a s k a n s e b a y i a n , y a i t i i iicirlya yany
berhubungan dengan t u g a s a k h i r i n i .
)Q A O '
C O N I I O L
l r S n c- I 8 1 8 0
C I U
m d F n A A l l
C O N l l O L
cpu J I - A I I
A 1 3 K'i'ii- e 414 - 115, m a
GAMBAR 2-22
K O N F I G U K A S I P I N D A R I 280
h o - A l 5 Outpu t t r i s t d t c t le l ladri d k t i f l i i c j l i , A g A15 rlleru
p a k a n 16-b i t ; I ~ ( J J t.:;s 1111:;. A d d r e s s bur, dkd11 111c.mbor
i k a n a l a m a t u111-ich Inernor1 I 64 liby t t.1 tJLiri
u n t u k d a t a 110 . I'nt uh perlCJdldlTldtdl1 I/() d i p d h d i
d e l a p a n b i t l v w e r a d d r e s s , s e h i l ~ g g a d d p a t rnernl l lh
s d n ~ p a i 2 5 6 i npu t a t a u o u t p u t por t .
DO-D7 I n p u t / o u t p u t t r l s t a t e dc11gd11 a k t i f l l ly l l , D O U7
merupakan 8 -b i t d a t a b11:: h i - d i r ect l o n d l yang
d i g u n a k a n u n t u k p u r t u k d r d n d a l a a r l t a r d menlor1 d d r ~
I / O .
hlREQ O u t p u t t r i s t a t c , d k t l f ] o h , s i g ~ l d l YHtQ ~nenllri j u k
k a n a d d r e s s b u s Inenampuny d l a m a t \ ,any v d l l d u n t u k
pembacdan d t a u p e n u l i s a n rnernori.
I O R Q O u t p u t t r i s t d t e d e n g a n a k t l t l o w , s i g n a l IORU
menunjukkan bahwa separuh bawah dari dddress h u s
berisi alamat yang valid untuk opt-brsi peolbd(:<id~~
atau penulisan pada I/O.
R D Output tristate, aktif low. R D ~ner~un jukkan bahwa
prosesor hendak membaca dari memori atau I / O .
WR Output tristate, aktif low. WR menunjukkan bahwd
prosesor data bus berisi data valid untuk disimpan
dalam alamat memori atau peralatan I / O .
RESET Input aktif low. R E S E T akan menjadikan PC menjadi
nol, pada waktu RESET address dan data bus akan
high impedance dan semua siqnal kontrol akan
men jadi inactive state.
3 . 3 Dlaqram Waktu C P U
I 8 0 akdn ~nengeh:;oht~:: I I ! f h i n ~ ( ~ l a l l r i I dll(~li~ik1
langkah yang terdiri d a r i sukurnpularl oyc:~-~isi ddsdr ~ ' c f i t 1 1 :
- Pembacaan dan penulisan pad'i r u c 2 r e o ~ 1
- Pembacaan dan penulisdn ~ ~ a t f ~ i ~)r?rala td11 I /o
V E M B A C A A N ATAU PENULISAN MEMORI
Pada gambar 2-22 ddalall sebuah peri nc-i a11 ddrl t l i d -
gram waktu pembacaan darl penulisdn aicmori. Write/enablc~
merupakan kombinasi dari MREQ dan WR. Read/enable merupa
kan kombinasi dari MRF-Q clan RD.
+. PPEMBACAAN ATAU PENULISAN 1/0
Microprosesor 280 rncr11.edi akan kedua ills t r u k s i 111pu t
dan output. Sebuah out put dari prosesor langkaIitl\ d sama
dengan penulisan ke memori , ddn menerima sebuah lnput d d ~ i
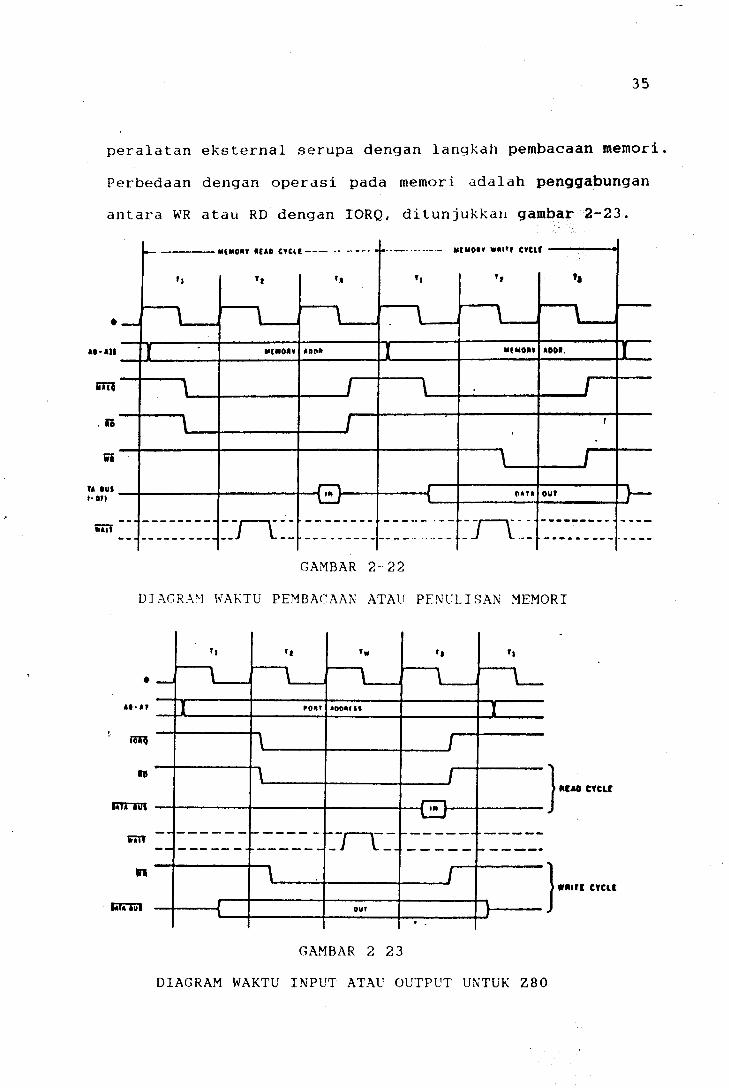
peralatan eksternal serupa dengan langkah pembacaan memori.
Perbedaan dengan operasi pada memori adalah penggabungan
antara WR atau KD dengan IORQ, ditunjukkan gambar 2-23.
DTAGR-AY \CAKTU PEMBACAAK ATAU P E N Y L I S A N MEMORT
D I A G R A M WAKTU INPUT ATAU OUTPUT UNTUK 280
7
I *A
- -- Mg*Q#v n t h 0 CVC(( --- - - - --- - 0 s . - -. --- - M t U O # l w#l ' f C V c l f
TI I* In l a '8
I -
\ 1 \ A d i \ i
- O 1 1 & our
--------, .----.- . - - - -----------a ---- 11 DUl I- 01)
--- m
ADO#.
I 1
I
AD - AIS I u ~ u o n v b n n n
- m
I I
--------- ..',""" "'9"
u t u o n v
- . iii
s

4 . MEMORI
4 . 1 EPROM
EPROM ( E r a s a b l e Proyrammdble Read Only Memory) meru-
pakan s a l a h s a t u j e n i s n o n - v o l a t i l e memori, yang hanya
d a p a t d i b a c a s a ja. N o n - - v o l a t i l e rnenrori a d a l a h memori yd~rg
d a p a t menyimpan d a t d , meskipun t i d a k a d a daya .
Program yang d i t u l i s k a n pada EPROM d a p a t d i h d p u s dan
d i i s i b e r u l a n g k a l i dengan c a r a d i h a p u s i s i n y a t e r l e b i h
d a h u l u kemudian b a r u d i i s i k a n proqram yang b a r u .
RAM (Random Access Memor y ) nier upaka11 jel~i s 11re111or.i
yang v o l a t i l e , ar t i 1 1 ) '4 d a t d b 'd r i ( j tcrs i lnpdt i xii..ci~i l l i lariq
j i k d dal-d d i bet ihdri m d t l . Ada (1~1,i I : : 1 i 1 , R-\?I (d ' ir l
d i n a m i s R A Y , keduanya dapdt di t iacd d d r ~ ~ l i i ::. R A Y l ) l d s d
d igunakan u n t u k men\rinrpan d a t d s e n r t ? r ~ t r . , i .
5 . PROGRAMMABLE PERIPHERAL INTERFACE 8255
PPI 8255 aierupakari p e r a l a t a l i i n t e r f a c e I / O ydny
mempunyai 3 buah p o r t yang masiny--masing d i l~13l i l l d i n d p o r t
A , p o r t B , port C nlasirig lndsill(3 dda 8 i t . D l ( j d l , i 1 1 1 P P I
8 2 5 5 s~idaki t e l d a p d t b u f f e i t r i - s t a t e unti11, t l a t a ).arig
berhubungan kc. C P C , sedar~c j o u t p u t mar;ir~cj -lna:; 1ng port- ,
merupakali p o r t yang nrernil iki b u f f e r d a n s l f a t l d t c h s e -
hirigga d a t a yang d i k e l u d r k d n dhdn t e t a p keddadr1rlh.d selania
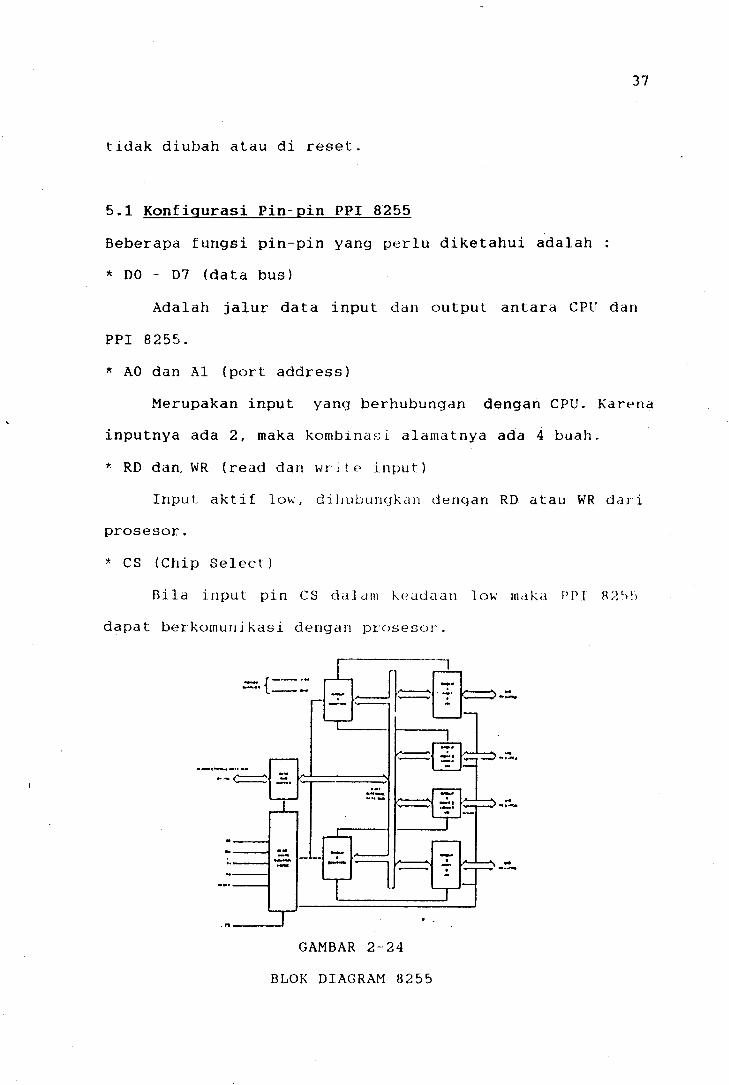
tidak diubah atau di reset.
5 . 1 Konfiqurasi P in-p in P P I 8255
Beberapa fungsi pin-pin yang perlu diketahui adalah :
* DO - D7 (data bus)
Adalah jalur data input ddn output antara CPU dan
P P I 8255 .
* A0 dan A 1 (port address)
Merupakan input yany berhubungan dengan CPU. Karena
inputnya ada 2, maka kombinasi alamatnya ada 4 b u a f ~ .
A RD dan, WR (read darl W I 1 ! c. input)
Input a k t i f l o w , d i I l ~ ~ l ) u n y k ~ i n cleriyan RD atau WR (lax-i
prosesor . * C S ( C h i p Select 1
B i l d iliput pin CS dd1d111 h(?dd~idrl IOW 111d)C~i I t l % ' ) ! >
dapat berkomuni kdsl d e r ~ y a ~ i prosesor .
GAMBAR 2-24
BLOK DIAGRAM 8255
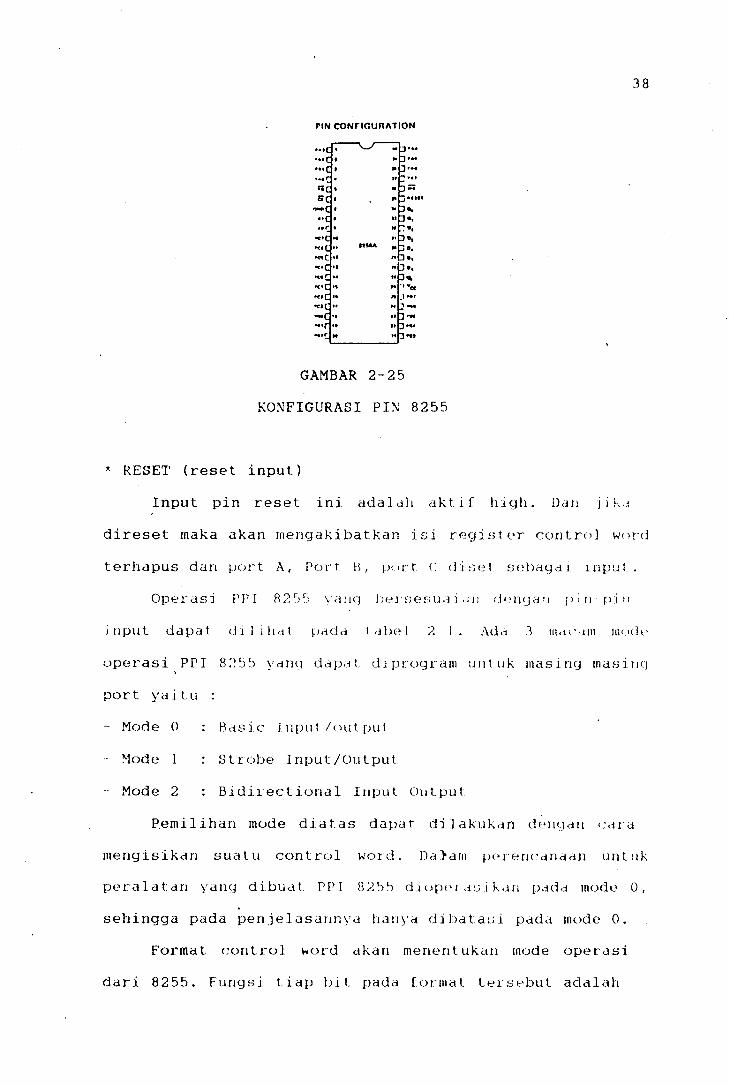
P I N CONFIGUflAT ION
GAMBAR 2-25
KONFIGURASI PIN 8255
RESET (reset i n p u t , )
I n p u t p i n r ese t i n i ddd ld l l dkt i f h i y h . 1)d11 j i !;\?
direset m a k a a k a n m e ~ i y a k i b a t k d ~ ? i s i r c y I :;t r . r cant-rol w o t t j
t c r ' h d p u s dd11 POI-t A , P ~ r t 1 , j)(rr t ( ' (11 s e t ~ ~ h d ~ d l ~np::t .
111put ddpd t (11 1 1 1 1 c i 1 d t r . i l ) ( ~ l % 1 . Atl'l 7 In' ic7 i111 I I I < N I + ,
o p c r a s i P P I 8255 ydncr dclpd t (31 p r o g r a m u1i1 u h Inas 1 I I ~ m d s i r i c y
p o r t y d i t u :
Mode 0 : B d s i c I l i p t i t / o u t p u t
- Mode 1 : S t l o b e I r i p u t / O u t p u t
-- Mode 2 : B i d i l e c t i o r ~ a l I r l p u t o ~ ~ t p u t
P e m i l i h d n mode d l d t , a s dapdt d l la l . rukdn dell(jd11 ( ~ d 1 - d
r n e n g i s i k a r ~ s u a t u c o n t r o l w o r d . Pd3dr11 per erlc:dnactn u n t ~ l l i
p e r a l d t d r l ydriy d i b u d t PI'I 8 2 5 5 d l c ) ~ ) c . r ~ ~ : ; i h d r ~ pilcll.3 ~nodc 0 ,
s e h i n g g a p a d a p e n j e l a s d l l r i } . d Ildtl)'d d i l . )d td: ; i p d d d mode 0 .
Format c - o r i t r o l ~ o r d d k a r i m e r i e r i t u k d n rnvde o p e r d s i
d a r i 8255. F u r ~ y s i t i a p b i t p d d a for- rndt tel s e b u t a d a l a i ~
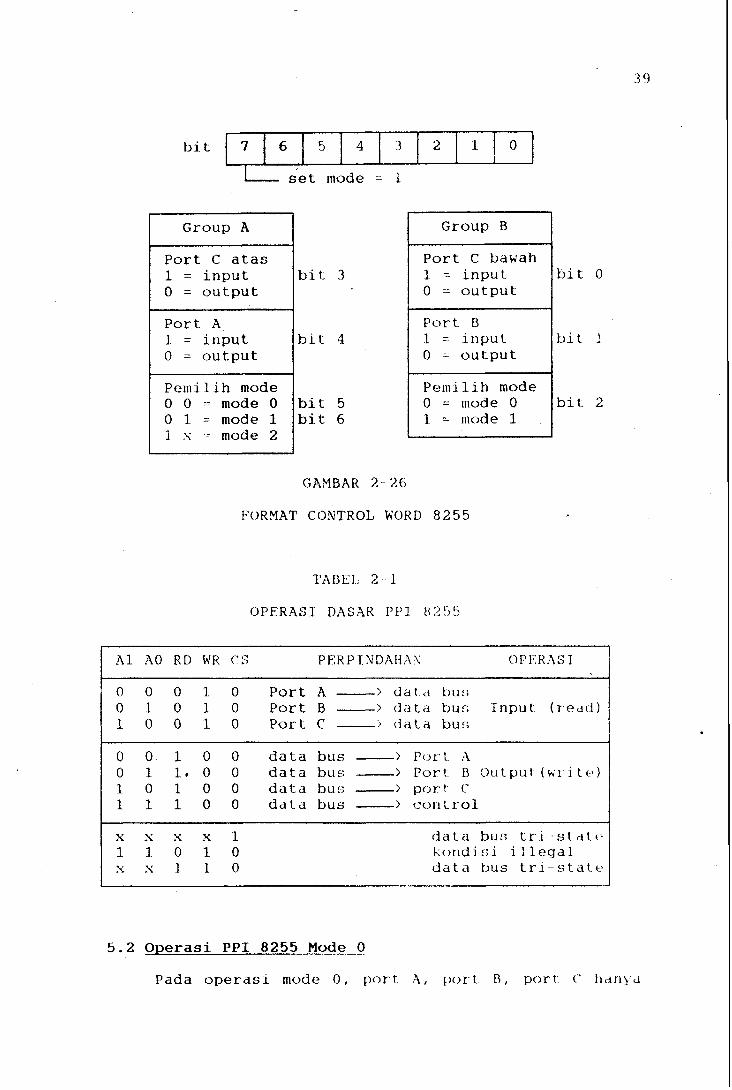
set mode - 1
Group A
Port C atas 1 = input 0 = output
Port A 1 = input 0 = output
Pemilih mode 0 0 = mode 0 0 1 = mode 1 1 s - mode 2
bit 3
bit 4
bit 5 bit 6
Group B
Port C bawah 1 = input 0 = output
P o r t B 1 = i n p u t 0 = output
Pemi 1 it1 mode 0 = Inode 0 1 = mode 1
bit 0
b i t !
bit. 2
GAMBAR 2 - 26
FURYAT CONTROL WORD 8255
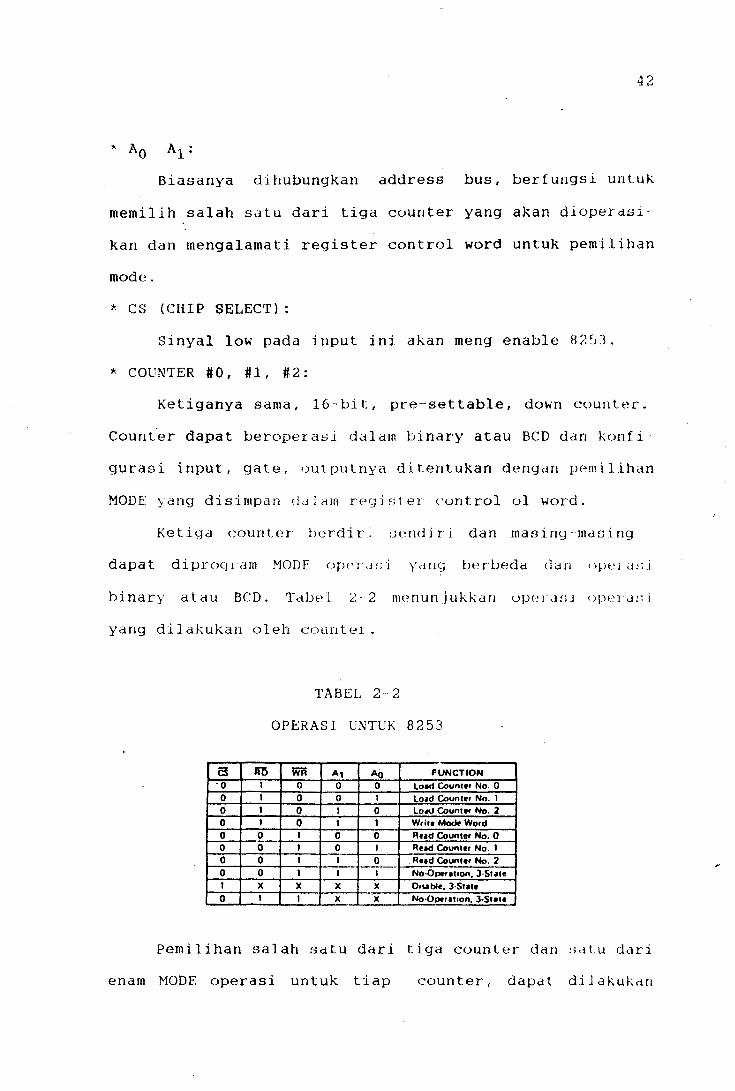
TADEI, 2- 1
OPERAS1 DASAK P P J 8 2 5 5
A1 A 0 R D W R cS PER P T NDAI1.A \ OPE,KAS T
0 0 0 1 0 Port A > dat , t bur; 0 1 0 1 0 Port B > data bus Input (redtl) 1 0 0 1 0 P o r t C - 1 d a t a bus
0 0 1 0 0 data bus -> P o r t :I 0 1 1, 0 0 d a t a bus -> Port B i l u tp~ l t ( ~ i l i t t > ) 1 0 1 0 0 ddt.d b u s -> polt ('
1 1 1 0 0 d d t d b u s -> c:oriLrol
s s s x l d a t a bus t r i - s t a t e 1 1 0 1 0 k c , r i d i s i i l legal s s l l 0 data bus t r l - s t a t & >
i
5.2 Operasi P P I 8255 Mode 0
Pada operasi mode 0 , port. .A, p o r t 13, p o r t C l ~ d r l ~ d
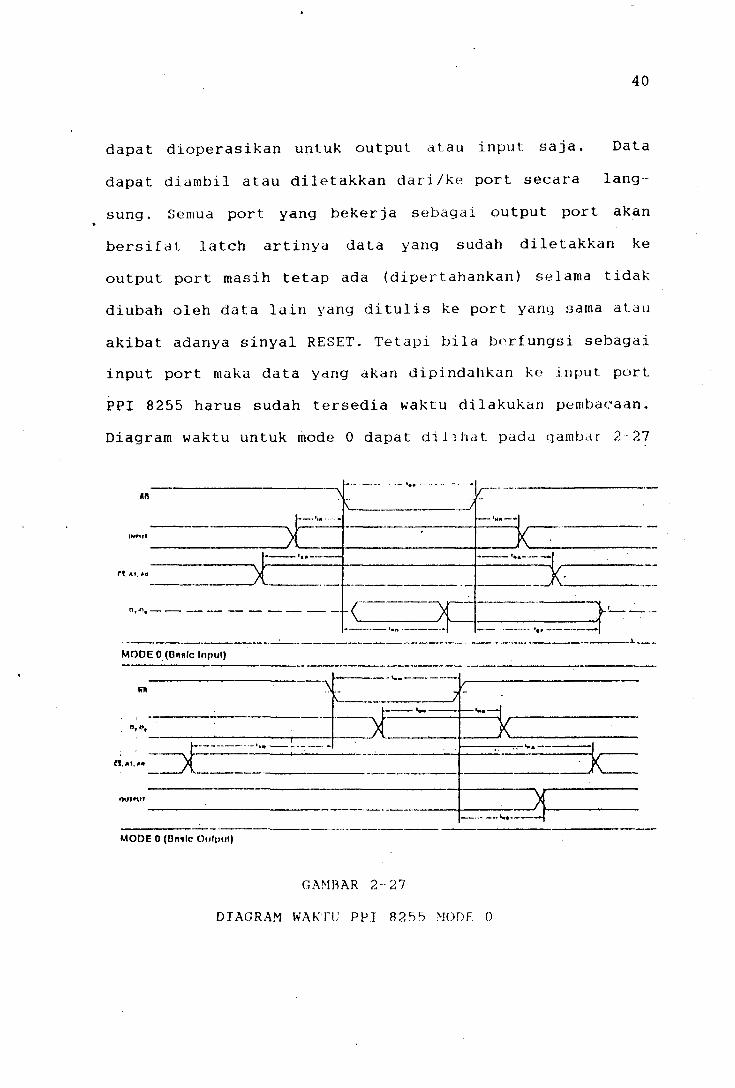
dapat dioperasikan untuk output atau input saja. Data
dapat didmbil atau diletakkan dari/kc port secara lang-
sung. Semua port: yang bekerja s e b a g a i output port akan
bersifat latch artinya data yang sudah diletakkan ke
output port masih tetap ada (dipertahankan) selama tidal;
diubah oleh data lain yany ditulis ke port yany sama atdu
akibat adanya sinyal RESET. Tetapi bila bflrfungsi sebagai
input port maka data yang akan dipindahkan ke i n p u t port
PPI 8255 harus sudah tersedia waktu dilakukan pembacaan.
Diagram waktu untuk mode 0 dapat dl lihdt pada c~ambar 2 27
- -.- . - - , .... - - - - - .-I J-- -- .- fin
MODE 0 (Onilc O~rfpttt)
G A M R A R 2-- 27
DIAGRAM WhK'l 'V P P I 8 2 5 5 YODE 0
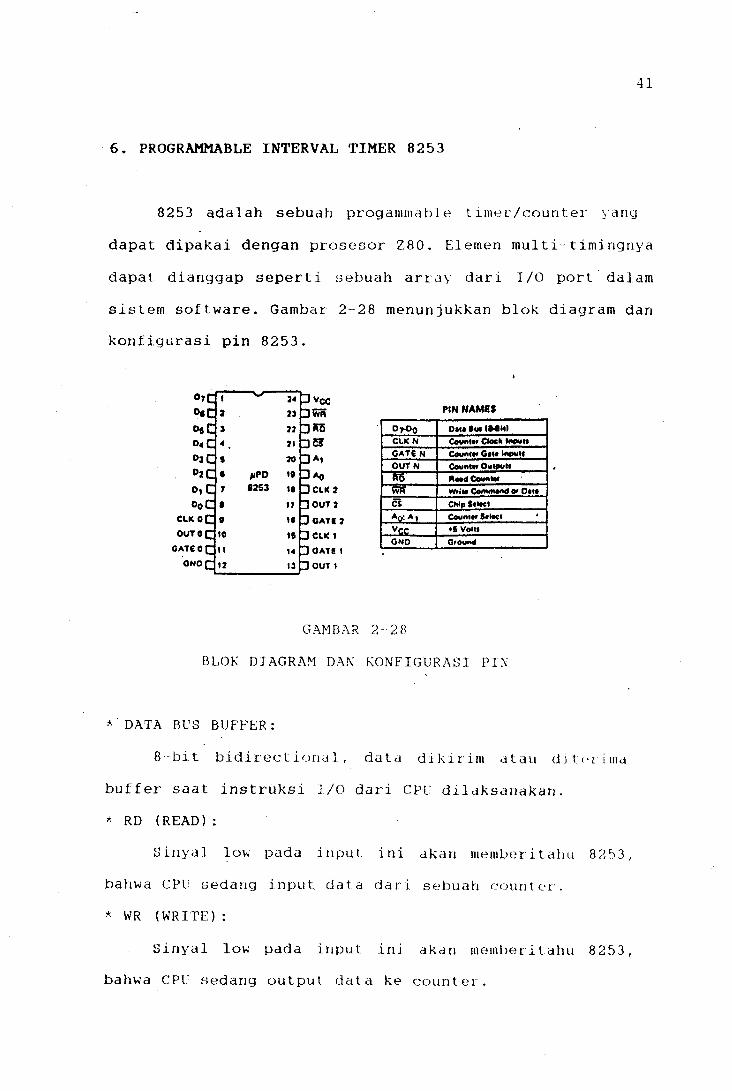
6 . PROGRAMPIABLE INTERVAL TIMER 8253
8253 a d a l a h s e b u a h progamn~ablt . t l ~ n e r / c o u n t e r ',.any-
d a p a t d i p a k a i dengan p r o s e s o r 2 8 0 . Elemen m u l t i - t imingnya
d a p a t d i a n g g a p s e p e r t i :;ebuah a r l a g . d a r i T / O port dalam
s i s t e m s o f t w a r e . Gambar 2-28 menunjukkan b l o k d i ag ram dan
k o n f i g u r a s i p i n 8253.
PIN NAMES i
B L O K DIAGRAM D A K KONFIGURRSI PIS
DATA BUS BUFFER:
8 b i t b i d i r e c t i o ~ l d l , d d t d d l h l r i n 1 d t d ~ (11 t ( ' I 1 I I I ~
b u f f e r s a a t i n s t r u k s i 1 /0 d a r i C P V d l l a k s d ~ l d k d r l .
* RD (READ) :
Sinyal low pada l r lpu t i n i d k d n n ~ e m b e r i t ~ i i ~ u 8 2 5 3 ,
bai~wa CPC' sedartg i n p u t d a t a d d r i sebuah c-ount et .
* WR (WRITE):
S i n y d l low pada i n p u t i n i dkdn 1ne111ber i tail11 8 2 5 3 ,
bahwa CPU sedang v u t p u t d a t a k e c o u n t e l .
A A(, A1:
Biasanya dihubungkan address bus, berfungsi untuk
memilih salah sdtu dari tiga counter yang akan dioperasl-
kan dan mengalamati register control word untuk pemilihan
mode.
* C S (CHIP SELECT) :
Sinyal low pada input ini akan meny enable 8253.
* C O U N T E R # 0 , # I , # 2 :
Ketiganya sama, 1 6 - . b i t , pre-settable, down courlter.
Cour~ter dapat beroperasi dalarn binary atau B C D dan i c o l ~ f i
gurasi input, gate, o l l t putnya dit-entukan detiydr! pc!rtiliklc~n
MODE qdng disin~pan (lei 1 d m r e y i s t e r c-o~ltrol ul word.
Ketiyd c o u r i t e r t)c.rdi~-, :;eritli r L dan masing lnds iny
dapat diyroy 1 d m YODE i 1.d11cj her bedd tfdi.1 o p v ~ d:; i
binary atdu B C D . Tdbt-'1 2 2 In(>nunjuhkcir~ L ) ~ ( > I , ~ : : J o [ ) c \ t ~ i : : i
ydrlg dilakukan ole11 c o u l ~ t e l .
Pemilihan salah satu dari tiga counter ddri ! j<it u dari
enam MODE operasi untuk tiap counter, dapat dii akukdn
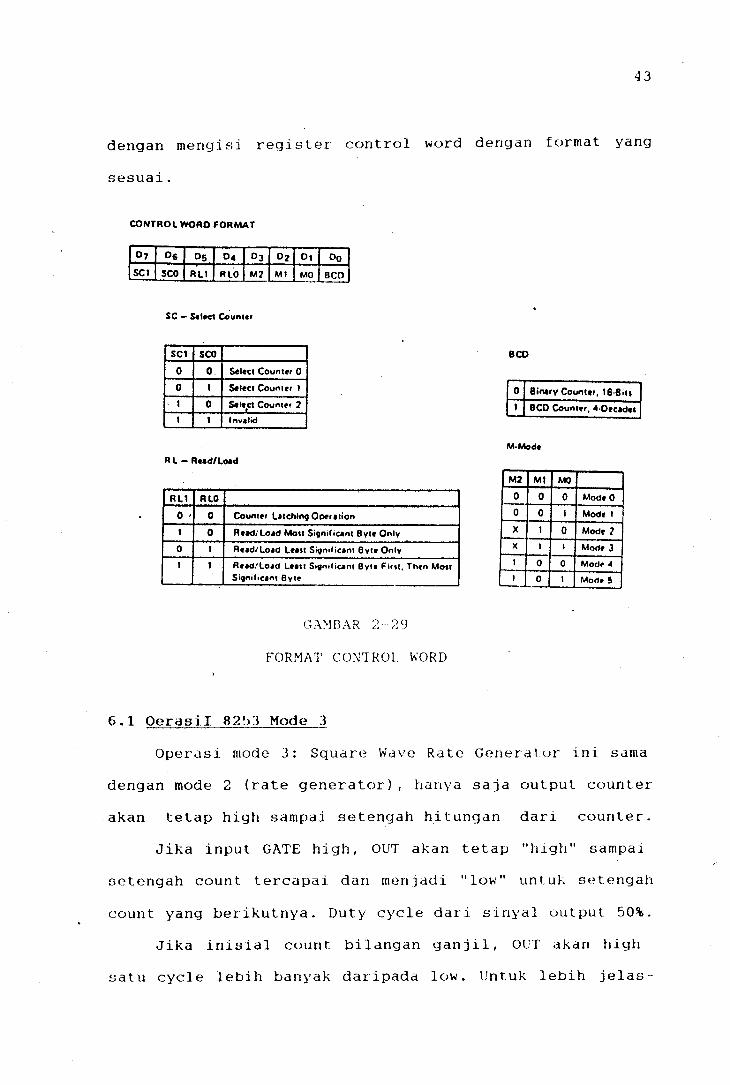
d e n g a n m e n g i s i r e g i s t e r c o n t r o l word d e n y a n f o r n ~ a t yang
s e s u a i .
CONTROL WORD FORMAT
SC1 SCO
Select Counter 0
0 S b c t Counter 2
1 1 tnvrlid
BCD
FORYAT CONTRO1. WORD
b
RL1 RLO
0 0 Countcf Lrlchinq Owration
6.1 OerasiI 8250 Mode 3
O p e r a s i mode 3 : S q u d r e Wave R a t e G e t i e r d t or i n i sama
d e n g a n mode 2 ( r a t e g e n e r a t o r ) , h a l l l a s a j a o u t p u t c o u n t e r
a k a n t e t a p h i g h s a m p a i s e t e n g a h h i t u n g a n d a r i c o u n t e r .
Jika i n p u t GATE h i g h , OUT a k a n t e t a p "111g11" s a m p a i
s e t e n g a h c o u n t t e r c a p d i d a n me11 j a d i "low" u n t u h s c ~ t e n g a h
c o u n t y a n g b e r i k u t n y a . Duty c y c l e d a r i s i n y a l o u t p u t 50%.
J i k a i r i i s i a l c o u n t b i l a n g d n g a n j i l , OUT d k a n h i g h
s a t u c y c l e l e b i h b a n y a k d a r i p a d a low. Untuk l e b i h j e l a s -
1
0
1
0
1
1
Read;Lord Most Siqntftunt Bvtr Only
Arrd/Lord Lcrst Sgntficrnt Bvte Onlv
Reld!Lord Leest Stgntltunt Byle Ftrrt. Thtn Mort Sqntf~crnt Byte -
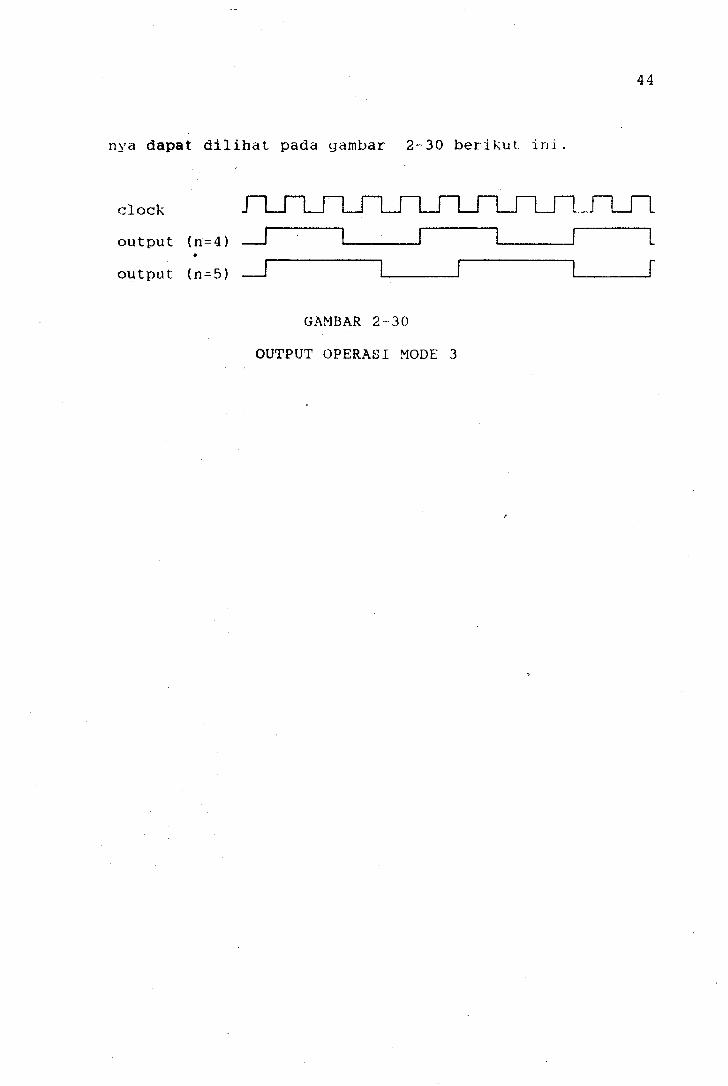
nya dapat dilihat pada yambar 2-30 berikut i n i .
clock k m
output (n=5) -J I 1 r GAMBAR 2 3 0
OUTPUT OPERAS1 YODE 3