







Bahasa
Halaman
Hukum


Utility of SCaMPR Satellite versus Ground-Based Quantitative Precipitation Estimatesin Operational Flood Forecasting: The Effects of TRMM Data Ingest
HAKSU LEE,*,1 YU ZHANG,# DONG-JUN SEO,*,@ ROBERT J. KULIGOWSKI,&
DAVID KITZMILLER,# AND ROBERT CORBY**
* NOAA/National Weather Service/Office of Hydrologic Development, Silver Spring, Maryland, and University
Corporation for Atmospheric Research, Boulder, Colorado#NOAA/National Weather Service/Office of Hydrologic Development, Silver Spring, Maryland
&NOAA/National Environmental Satellite, Data and Information Service/Center for Satellite Applications
and Research, College Park, Maryland
** NOAA/National Weather Service/West Gulf River Forecast Center, Fort Worth, Texas
(Manuscript received 17 October 2012, in final form 13 December 2013)
ABSTRACT
This study examines the utility of satellite-based quantitative precipitation estimates (QPEs) from the Self-
CalibratingMultivariate PrecipitationRetrieval (SCaMPR) algorithm for hydrologic prediction. In this work,
two sets of SCaMPRQPEs, onewithout and the other with Tropical RainfallMeasurementMission (TRMM)
version 6 data integrated, were used as input forcing to the lumped National Weather Service hydrologic
model to retrospectively generate flow simulations for 10 Texas catchments over 2000–07. The year 2000 was
used for the model spinup, 2001–04 for calibration, and 2005–07 for validation. The results were validated
using observed streamflow alongside similar simulations obtained using interpolated gauge QPEs with
varying gauge network densities, and still others using the operational radar–gauge multisensor product
(MAPX). The focus of the evaluation was on the high-flow events. A number of factors that could impact
the relative utility of SCaMPR satellite QPE and gauge-only analysis (GMOSAIC) for flood prediction
were examined, namely, 1) the incremental impacts of TRMM version 6 data ingest, 2) gauge density, 3)
effects of calibration approaches, and 4) basin properties. Results indicate that ground-sensor-based QPEs
in a broad sense outperform SCaMPR QPEs, while SCaMPR QPEs are competitive in a minority of
catchments. TRMM ingest helped substantially improve the SCaMPR QPE–based simulation results.
Change in calibration forcing, that is, calibrating the model using individual QPEs rather than the MAPX
(the most accurate QPE), yielded overall improvements to the simulation accuracy but did not change the
relative performance of the QPEs.
1. Introduction
Precipitation is a crucial hydrometeorological input
for hydrologic models to produce skilful flood pre-
diction. At most U.S. River Forecast Centers (RFCs),
the radar–gauge multisensor quantitative precipitation
estimate (QPE), or MQPE hereinafter, serves as input
data to the Sacramento SoilMoistureAccountingmodel
(SAC-SMA) (Burnash et al. 1973) to support flood fore-
casting on a daily basis. MQPEs are produced by merging
radar and gauge data via the multisensor precipitation
estimator (MPE) (Fulton et al. 1998; Seo 1998a,b; Seo
et al. 1999; Seo and Breidenbach 2002); in operations,
a basin average of gridded MQPEs, or radar–gauge
multisensor product (MAPX), is often used. In the
United States, the radar and gauge networks are un-
evenly distributed, leavingmany areas without adequate
coverage. In view of this fact and the presence of errors
associated with rain gauges and radar (Zhang et al.
2013), it is widely anticipated that the use of satellite
QPEs (SQPEs) could augment operational river flow
forecasting for some basins outside of radar coverage
and in sparsely gauged areas. They will need to be used
1Current affiliation: NOAA/National Weather Service/Office
of Climate, Water, andWeather Services, Silver Spring, Maryland.@Current affiliation: Department of Civil Engineering, Univer-
sity of Texas at Arlington, Arlington, Texas.
Corresponding author address: Haksu Lee, NOAA/NWS/Office
of Climate, Water, and Weather Services, 1325 East–West High-
way, Silver Spring, MD 20910.
E-mail: [email protected]
JUNE 2014 LEE ET AL . 1051
DOI: 10.1175/JHM-D-12-0151.1

in a manner that considers their own limitations, of
course, including complex terrain (orographic enhance-
ments of convection are captured, but seeder–feeder
enhancements are not) and snow cover [which precludes
microwave (MW)-based retrievals but still allows in-
frared (IR)-based estimates].
Among real-time multisatellite QPE algorithms, this
study uses the Self-Calibrating Multivariate Precip-
itation Retrieval (SCaMPR) (Kuligowski 2002, 2010;
Kuligowski et al. 2013) because of its short latency
(;17min) relative to other multisatellite QPE algo-
rithms such as the Climate Prediction Center (CPC)
morphing technique (CMORPH) (Joyce et al. 2004),
Precipitation Estimation from Remotely Sensed Infor-
mation using Artificial Neural Networks (PERSIANN)
(Sorooshian et al. 2000) and PERSIANN Cloud Clas-
sification System (PERSIANN-CCS) (Hong et al. 2004),
Global Satellite Mapping of Precipitation (GSMaP)
near real time (GSMaP-NRT) (Kubota et al. 2007), the
Naval Research Laboratory (NRL) blended product
(Turk and Miller 2005), and the Tropical Rainfall
Measuring Mission (TRMM) Multisatellite Precip-
itation Analysis (TMPA) (Huffman et al. 2007, 2010).
This feature renders the SCaMPR SQPE more suitable
for real-time forecasting of flash and river floods than
other SQPEs. In light of the NWS efforts to capitalize on
SQPE from the future Global Precipitation Measure-
ment (GPM) satellite, we evaluated two SCaMPR
SQPEs in this study: SCaMPR-P (P for passive micro-
wave), which uses Special Sensor Microwave Imager
(SSM/I) and Advanced Microwave Sounding Unit
(AMSU)-B data as calibration targets, and SCaMPR-T
(T for TRMM), which adds predictands from the TRMM
version 6 algorithms using the TRMM Microwave Im-
ager (TMI) and Precipitation Radar (TPR). These
TRMM instruments provide proxies of similar products
from GPM Microwave Imager and Dual-Frequency
Precipitation Radar (DPR).
The comparative utility of gauge-, radar-, and satellite-
based QPEs for hydrological applications has been ex-
tensively studied in hydrology and hydrometeorology.
Compared to mean-field bias-adjusted radar or multi-
sensor QPEs, gauge rainfall and local bias-adjusted ra-
dar or multisensor QPEs may provide limited information
on rainfall spatial variability, resulting in reduced perfor-
mance in streamflow simulation (Gourley and Vieux
2005). Adjusting radar rainfall to account for errors as-
sociated with the vertical profile of reflectivity (VPR),
reflectivity–rainfall rate (Z–R) relationship, and radar
calibration can significantly improve streamflow simu-
lations using hydrologic models (Borga 2002); in a simi-
lar vein, accounting for sources of bias in satellite estimates
such as topography, climate regime, land use, and land
cover may also enhance their utility in hydrologic fore-
casting (Gebregiorgis and Hossain 2012; Gebregiorgis
et al. 2012). When compared to IR-based satellite rain-
fall retrievals, passive microwave (PM) retrievals were
found to overestimate time to peak flow, especially for
flood events with short duration (Hossain andAnagnostou
2004). Compared to PM retrievals, combined PM–IR
retrievals degraded the performance of a hydrologic
model on flood volume and time to peak owing to the
lower rain detection accuracy of the IR retrievals (Hossain
and Anagnostou 2004). Bitew and Gebremichael (2011a)
reported that algorithms directly using MW data
(CMORPH, TMPA 3B42RT) outperformed an algo-
rithm fitting IR data to MW rain rates (PERSIANN),
and that SQPE (TMPA 3B42RT) performed much
better than the satellite-gauge QPE (TMPA 3B42). Su
et al. (2008) demonstrated that variable infiltration ca-
pacity (VIC) model simulations for the La Plata basin
(3.2 3 106 km2) using TMPA SQPE reproduced flood
events well on a daily scale, as well as seasonal and in-
terannual streamflow variability. However, simulated
daily peak flows using TMPA SQPE tended to be biased
high (Su et al. 2008). While much of this bias can be
addressed by incorporating rain gauge data into the
analysis (e.g., Behrangi et al. 2011; Pan et al. 2010), this
presumes the availability of such data in sufficient
quantity, quality, and timeliness in real-time operational
applications, which is infrequently the case. Further-
more, gauge correction is just as critical for hydrologic
applications of radar data, as pointed out by Gourley
et al. (2011).
Although the aforementioned literature provides a
broad view of the quality of various satellite and com-
posite QPE products and their implications on hydro-
logic modeling, few of them were able to address two
important science questions: 1) under what specific cir-
cumstances (e.g., the density of the gauge network)
might the value of the SQPEs exceed that of simple,
gauge-interpolated QPEs and 2) what is the actual im-
pact of TRMM and potentially GPM data alone on the
hydrologic prediction accuracy? The isolated impacts of
TRMM data were not examined in these studies, as the
work relied on blended products fromTRMMand other
satellites (Bitew and Gebremichael 2011b; Su et al.
2008). This study is a unique opportunity to address both
questions. To answer the first question, a high-quality
radar–gauge QPE (MQPE) and multiple sets of gauge-
only analyses based on thinned gauge networks are
employed, and the results are contrasted to those from
the SCaMPR QPEs. The second question is addressed
by using the two sets of SCaMPR QPEs, one with and
the other without TRMM ingest. Such an experimental
design allows us to isolate the impacts of TRMM QPEs
1052 JOURNAL OF HYDROMETEOROLOGY VOLUME 15

on hydrologic prediction and thereby help anticipate the
potential hydrologic value of similar QPEs from GPM.
It is worth noting that, since TRMM is not in a sun-
synchronous orbit, its expected impacts will vary with
time as it samples different portions of the diurnal
convective cycle. These effects should largely average
out during a multiyear study such as this one and thus
should not materially affect the conclusions reached
here; however, the shorter-term impacts of orbital dy-
namics on the rainfall retrievals would certainly cause
some fluctuations in error with time and would be an
interesting avenue for future study.
Other distinct features of this study include the fol-
lowing. First, this study employs the lumped NWS
hydrologic model, which, despite not being a fully
physically basedmodel, has been shown to be among the
best performers during the two Distributed Model In-
tercomparison Project (DMIP) experiments (Reed et al.
2004; Smith et al. 2012). Using this model not only helps
reduce the impact of model inaccuracy, but also allows
the experiment to mimic operational hydrologic pre-
diction at NWS. Second, a careful calibration/validation
experiment was carried out wherein calibration was
done via an objective, automated approach that has been
shown to work effectively (Kuzmin et al. 2008). Third, in
contrast to studies, including Bitew and Gebremichael
(2011a) and Su et al. (2008), presenting hydrologic ap-
plications of SQPEs for daily streamflow simulations, the
study focuses on hourly streamflow simulation and exam-
ines the accuracy of the model in representing high flow
events (near or exceeding flood stage) rather than average
flow conditions; therefore, the result has more direct im-
plications for potential operational adoption of SCaMPR
QPEs. Fourth, the study is based on a considerably larger
sample, which encompasses 10 catchments with a variety of
size and hydroclimate regimes, and thereby allows a close
examination of the dependence of hydrologic fidelity of
SCaMPR on these features.
This paper is organized as follows. Section 2 describes
the hydrological model, parameter estimation and cali-
bration procedure, and validation metrics. Section 3
describes the study basins and QPEs. Section 4 sum-
marizes theQPE evaluation results and discussion of the
model performance on simulating flood events. Finally,
section 5 presents conclusions.
2. Hydrological model, parameter estimation andcalibration procedure, and evaluation metrics
a. Hydrological model
The model used in this study is the lumped Sacra-
mento Soil Moisture Accounting model (Burnash et al.
1973) operating on an hourly time step. While SAC-
SMA conceptualizes rainfall–runoff transformation
processes focused on parameterizing soil moisture char-
acteristics, its parameters were developed in a way to be
interpreted with a physical meaning. Since its first in-
troduction, the SAC-SMA has been used extensively in
operations and in scientific studies ranging from flash
flood modeling (Reed et al. 2007) to land surface mod-
eling (Schaake et al. 2001) to data assimilation (Seo et al.
2009) to ensemble forecasting (Seo et al. 2010). The SAC-
SMA is available within the Community Hydrologic
Prediction System (CHPS) of the NWS and has been
used inmost RFCs to issue flood forecasts on a daily basis
throughout the United States. The SAC-SMA inputs are
mean areal precipitation (MAP) and monthly climatol-
ogy of daily mean areal potential evapotranspiration
(MAPE), and the output is the total channel inflow (TCI)
from two subsurface soil storages—upper zone (UZ) and
lower zone (LZ)—plus the overland flow zone. The LZ is
normally much thicker than the UZ and contains the
majority of soil moisture to meet the evapotranspiration
demand. In addition, the LZ is the primary source of
baseflow fed to the channel. In the UZ, soil moisture is
divided into tension and free water content, or UZTWC
and UZFWC, respectively. Similarly, the LZ soil mois-
ture states are composed of tension water (LZTWC) and
supplemental and primary free water (LZFSC and
LZFPC, respectively). Water stored in the impervious
surface area and five soil moisture content values in two
subsurface storages interact to generate six runoff com-
ponents: impervious, surface, and direct runoff as fast-
response components and interflow, supplemental, and
primary groundwater runoff as slow-response compo-
nents (Koren et al. 2004). The TCI from the SAC-SMA is
then routed through a unit hydrograph (UH) to obtain
streamflow at the outlet of a basin.
b. Parameter estimation and calibration procedure
In the first step, the Adjoint-Based Optimizer
(AB_OPT) (Seo et al. 2009) is used to estimate long-term
biases in the precipitation and potential evaporation (PE)
data, which is followed by estimating the empirical UH.
In the last step of AB_OPT, the SAC-SMA model pa-
rameters are locally calibrated. The AB_OPT uses ob-
served streamflow as a calibration target at all three steps
but calibrates different parameters at each step.
The long-term biases in the precipitation and PE data
are estimated based on the water balance concept, and
this estimate of long-term bias in each QPE product is
used to correct the QPE product. Equation (1) is the
objective function (JB) used in this step where the control
variables include multiplicative adjustment factors for
precipitation (XP) and potential evaporation data (XE):
JUNE 2014 LEE ET AL . 1053
JB5
��n
i51
ZQ,i 2 �n
i51
HQ,i(XP,XE)
�2(1)
subject to
XS,j5M(XS,j21,XP,XE), j5 2, . . . ,n , (2)
XminS,j #XS,j#Xmax
S,j , j5 1, . . . ,n . (3)
In the above, ZQ,i is the observed streamflow at hour
i (m3 s21); HQ,i(�,�) is the mapping of the control vari-
ables to the simulated flow at hour i;M(�,�,�) is themodel
that calculates the SAC states at hour j (XS,j) based on
model dynamics and the SAC states in the previous time
step (XS,j21); n denotes the total number of hours in the
simulation period. To capture the total volume of
streamflow observations (ZQ,i) for the entire calibration
period, the bias in the PE data is adjusted during the
procedure along with the bias in the precipitation data.
In this step, the numerical algorithm used is the Broyden–
Fletcher–Goldfarb–Shanno variant of Davidon–Fletcher–
Powell minimization (DFPMIN) (Press et al. 1992).
Equation (4) shows the objective function (JUH) for
the empirical UH estimation with the DFPMIN algo-
rithm. In Eq. (4), the control variables are UH ordinates
(XUH).
JUH 5 �n
i51
[ZQ,i 2HQ,i(XUH)]2 (4)
subject to
XUH,j $ 0, j5 1, . . . , ny . (5)
In the above, XUH,j is the jth ordinate of the UH
(m3 s21 mm21) and ny denotes the total number of UH
ordinates.
The local optimization of the SAC model parameters
is implemented with the stepwise line search (SLS)
technique (Kuzmin et al. 2008). Equation (6) shows the
objective function (JPAR) where the control variables
are the SAC parameters (XPAR):
JPAR5
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�K
k51
�s1
sk
�2
�nk
i51
[ZQ,k,i 2HQ,k,i(XPAR)]2
s(6)
subject to
XS,k 5M(XS,k21,XPAR), (7)
XminS,j #XS,j#Xmax
S,j , j5 1, . . . ,n , (8)
XminPAR,j #XPAR,j #Xmax
PAR,j, j5 1, . . . ,m . (9)
In Eqs. (6)–(9), ZQ,k,i and HQ,k,i(�) denote the observed
and simulated flows (m3 s21), respectively, which were
averaged over time interval k at the kth time scale; sk
the standard deviation of observed flow at the kth time
scale; K the total number of time scales; nk the number
of observations at the kth time scale;XPAR the vector of
the SAC parameters; XPAR,jmin and XPAR,j
max denote the
lower and upper bounds of the jth SAC parameter; and
m the total number of SAC parameters. In this work, we
used k5 1, 2, 3, and 4, which correspond to hourly, daily,
weekly, and monthly scales of aggregation.
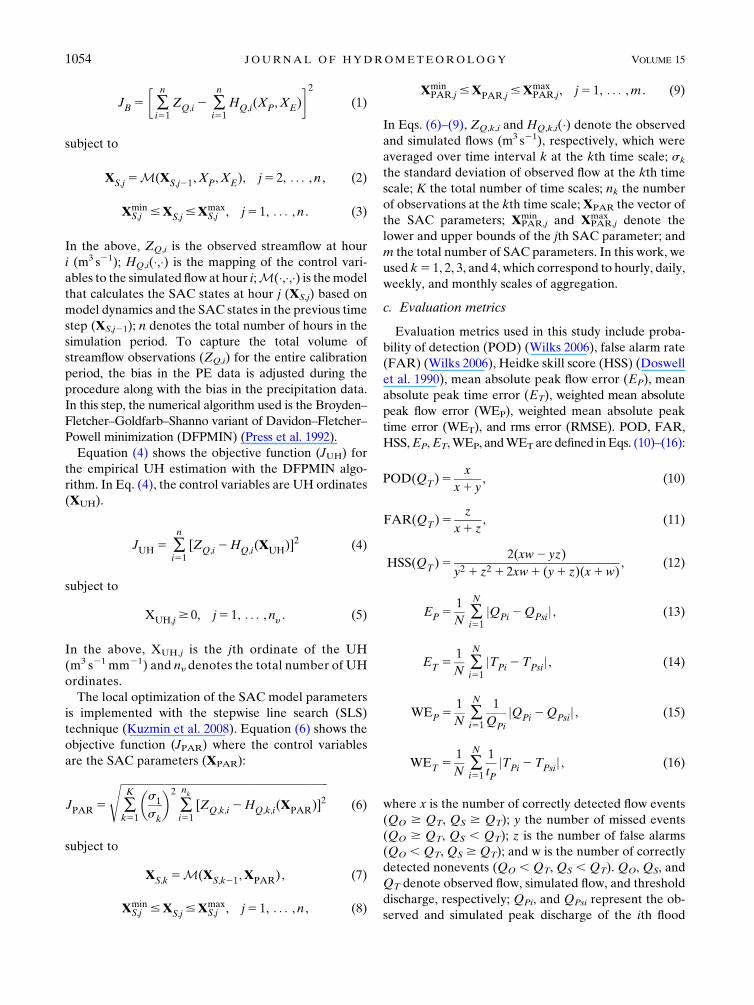
c. Evaluation metrics
Evaluation metrics used in this study include proba-
bility of detection (POD) (Wilks 2006), false alarm rate
(FAR) (Wilks 2006), Heidke skill score (HSS) (Doswell
et al. 1990), mean absolute peak flow error (EP), mean
absolute peak time error (ET), weighted mean absolute
peak flow error (WEP), weighted mean absolute peak
time error (WET), and rms error (RMSE). POD, FAR,
HSS,EP,ET,WEP, andWET are defined inEqs. (10)–(16):
POD(QT)5x
x1 y, (10)
FAR(QT)5z
x1 z, (11)
HSS(QT)52(xw2 yz)
y21 z21 2xw1 (y1 z)(x1w), (12)
EP 51
N�N
i51
jQPi2QPsij , (13)
ET 51
N�N
i51
jTPi2TPsij , (14)
WEP 51
N�N
i51
1
QPi
jQPi 2QPsij , (15)
WET 51
N�N
i51
1
tPjTPi2TPsij , (16)
where x is the number of correctly detected flow events
(QO $ QT, QS $ QT); y the number of missed events
(QO $ QT, QS , QT); z is the number of false alarms
(QO , QT, QS $ QT); and w is the number of correctly
detected nonevents (QO , QT, QS , QT). QO, QS, and
QT denote observed flow, simulated flow, and threshold
discharge, respectively; QPi, and QPsi represent the ob-
served and simulated peak discharge of the ith flood
1054 JOURNAL OF HYDROMETEOROLOGY VOLUME 15

event, respectively; TPi and TPsi represent the observed
and simulated time to the ith peak, respectively; tP de-
notes time to peak flow of the empirical unit hydrograph
estimated using MAPX (Table 1); N denotes the num-
ber of flood events selected.
As noted by Doswell et al. (1990), HSS falls within
a (21, 1) range: HSS5 1 without any incorrect forecasts,
that is, y 5 z 5 0; HSS 5 0 if x 5 y 5 0 (no observed
events) or x 5 z 5 0 (no events forecast); HSS 5 22zy/
(y2 1 z2) if x 5 w 5 0 (no correct forecasts). In the
evaluation, model skill in detecting flood events is
quantified with POD, FAR, and HSS. Errors in peak
flow magnitude and timing are measured by EP, ET,
WEP, and WET, and overall model performance on
streamflow simulation by RMSE. As EP and ET values
are likely biased toward larger events and/or basins, di-
mensionless measuresWEP andWETwere introduced to
reduce the effect of different sizes of events and basins.
3. Study area and QPE dataset
a. Study basins
The study area includes 10 basins in Texas within the
service area of the West Gulf River Forecast Center
(WGRFC), which range in area from 218 to 1795 km2.
Figure 1 shows the location of the study basins, Hydro-
meteorological Automated Data System (HADS) rain
gauges, and Weather Surveillance Radar-1988 Doppler
(WSR-88D) units (Crum and Alberty 1993). Table 1
summarizes the study basins.
The basins become progressively wetter toward east-
ern Texas in terms of Bowen ratio as well as runoff co-
efficients (Reed et al. 1997). Runoff coefficients vary
from 0.12 to 0.16 for four dry basins in southern Texas
and 0.24 to 0.31 for six wet basins in eastern Texas.Mean
annual MAPX for the period 2000–07 varies from 869 to
1061mm for dry (in terms of Bowen ratio) basins and
831 to 1342mm for wet basins (Table 1). Hourly stream-
flow data were obtained from the U.S. Geological Sur-
vey (USGS). Operational SAC-SMA parameters, 6-h
UH,MAPX, and the monthly climatology ofMAPE are
provided by the WGRFC. The hourly UH is derived
from the operational 6-h UH by the S-curve method
(Chow 1964). Operational SAC-SMA parameters and
hourly UHs are used as a priori input to the calibration
procedure.
b. SCaMPR satellite QPE
SCaMPR is a multisatellite QPE algorithm that aims
to improve the accuracy of IR-based rainfall estimates
from geostationary platforms through calibration against
microwave-based rainfall estimates from low-earth-orbit
platforms (Kuligowski 2002, 2010; Kuligowski et al. 2013).
TABLE 1. Study basins where QW and QF denote flood warning discharge and flood discharge, respectively; CR denotes the runoff
coefficient (annual runoff divided by annual MAPX) for the period of 2000–07; tP is time to peak flow of the empirical unit hydrograph
estimated using MAPX. TheQW andQF for each basin is available on the NWSAdvanced Hydrologic Prediction Service website (http://
water.weather.gov/ahps/).
Basin ID USGS ID Area (km2)
Annual MAPX
(mmyr21)
Annual runoff
(mmyr21) CR QW (m3 s21) QF (m3 s21) tP (h)
GNVT2 08017200 266 911 276 0.3 11 15 17
LYNT2 08110100 519 1006 162 0.16 11 108 18
MCKT2 08058900 439 904 221 0.25 35 45 14
MDST2 08065800 868 1156 305 0.26 88 204 19
MTPT2 08162600 447 1342 380 0.28 23 68 17
QLAT2 08017300 218 831 255 0.31 16 20 14
REFT2 08189500 1795 869 105 0.12 105 140 50
SBMT2 08164300 919 1061 166 0.16 74 125 21
SCDT2 08176900 935 939 111 0.12 127 153 15
SDAT2 08070500 326 1323 320 0.24 48 105 16
FIG. 1. Map of the study basins in Texas and the locations of the
HADS rain gauges and WSR-88D units.
JUNE 2014 LEE ET AL . 1055

The predictors of SCaMPR are IR data (brightness tem-
peratures and derived quantitiess) from the Geostationary
Operational Environmental Satellite (GOES) series. This
study evaluates two SCaMPR products generated with
different predictands. SCaMPR-P (P for passive micro-
wave) was created using only microwave-based rainfall
estimates from the Defense Meteorological Satellite Pro-
gram (DMSP) SSM/I (Ferraro 1997) and the National
Oceanic and Atmospheric Administration (NOAA) Ad-
vancedMicrowaveSoundingUnitB (AMSU-B) (Vila et al.
2007) as predictands. SCaMPR-T (T for TRMM) adds the
TMI (Kummerow et al. 2001) and TPR (Iguchi et al. 2000)
data from the TRMM version 6 algorithms. SCaMPR-T is
included in the evaluation dataset to assess the added
value of TRMM data for operational flood prediction.
Details of the SCaMPR algorithm can be found in
Kuligowski (2002, 2010) and Kuligowski et al. (2013).
c. Gauge-based QPE
Gauge-based QPE is produced by the MPE (Fulton
et al. 1998; Seo et al. 1999; Seo and Breidenbach 2002),
which is a set of algorithms operationally used at the
RFCs and Weather Forecast Offices that has produced
hourly QPE on the Hydrologic Rainfall Analysis and
Prediction (HRAP) grid (;4 3 4 km2, polar stereo-
graphic) over the conterminous United States since
2002. To compute gauge-based QPE, the MPE uses a
single optimal estimation (SOE) algorithm, which is a
variant of simple kriging (Seo 1998a; Journel and
Huijbregts 1978). The gauge rainfall estimates are ad-
justed in reference to climatic precipitation grids from
Parameter-Elevation Regressions on Independent Slopes
Model (PRISM) (Daly et al. 1994) as well as the gauge
reports from the Cooperative Observer Program (COOP)
to improve the overall bias and their spatial pattern
(Zhang et al. 2013). QPE estimated by the MPE algo-
rithm using gauge data only is referred to as GMOSAIC.
The rain gauge data are obtained from the HADS (www.
nws.noaa.gov/oh/hads/; Kim et al. 2009). To address the
effect of gauge density on the utility of GMOSAIC for
flood prediction, seven thinned gauge networks are
randomly drawn using 90%, 50%, and 25%of the gauges in
the original network,which are referred to asGMOSAIC90,
GMOSAIC50, and GMOSAIC25, respectively. One,
two, and four samples are drawn for GMOSAIC90, 50,
and 25, respectively. Table 2 shows the scenario-mean
gauge report frequency (GRF) for GMOSAICs, where
GRF is defined as themean number of gauge reports per
day per HRAP pixel (Zhang et al. 2013).
d. MAPX as a radar–gaugemultisensorQPE (MQPE)
To produce MAPX, radar rainfall is estimated based
on recommendedZ–R relationships in NationalWeather
Service (2006), where Z and R denote the radar re-
flectivity factor and rain rate (mmh21), respectively.
Digital precipitation array (DPA) (Klazura and Imy
1993) products from all WSR-88D sites are then mo-
saicked to produce consolidated radar rainfall. Sub-
sequently, the bias correction of the radar rainfall field is
carried out based on estimated mean field bias (MFB)
(Seo et al. 1999) or local bias (LB) (Seo and Breidenbach
2002) with a reference to the rain gauge data from the
HADS. The MPE optimally combines gauge and bias-
corrected radar rainfall data using a variant of the bi-
variate extension of SOE (Seo 1998a,b), which produces
the gridded MQPE. The gridded MQPE produced by
the automated procedure is subject to scrutiny and de-
cision by forecasters in RFCs. Finally, RFCs produce
MAPX based on the basin average of this gridded
MQPE product. It is worth mentioning that both bias
correction and multisensor merging algorithms in MPE
largely suppress the residual discrepancies among ra-
dars. The MQPEs have been extensively used in hy-
drologic modeling studies as well as field operations
(Seo et al. 2011; Smith et al. 2004, 2012, and references
therein). Previous studies have shown that MQPEs are
comparatively more accurate than simple gauge-only
analysis (Habib et al. 2013; Wang et al. 2008). Habib et al.
(2013) found that rain gauge observations showed lower
skill in rainfall detection than MQPEs. They also found
that the interventions of operational hydrologists improved
the accuracy of MQPEs by reducing the occurrences of
falsely detecting rainfall. Seo (1998b) showed that MQPEs
are generally more accurate than either rain gauge data or
bias-corrected radar rainfall data. Given the findings
from the above studies, we use MAPX as a comparison
standard for both SCaMPR SQPEs and GMOSAICs.
e. Intercomparison of QPEs
Figure 2 shows signature plots of the precipitation
data at hourly and monthly scales. Figure 2a shows the
TABLE 2. Scenario-mean gauge report frequency for
GMOSAIC90, 50, and 25.
Basin
ID
Area
(km2) GMOSAIC90 GMOSAIC50 GMOSAIC25
MCKT2 439 73 40 23
QLAT2 218 70 38 22
GNVT2 266 69 38 21
LYNT2 519 47 25 12
SDAT2 326 40 22 11
SBMT2 919 32 17 9
MDST2 868 31 18 8
MTPT2 447 26 13 7
SCDT2 935 24 14 7
REFT2 1795 13 8 4
1056 JOURNAL OF HYDROMETEOROLOGY VOLUME 15
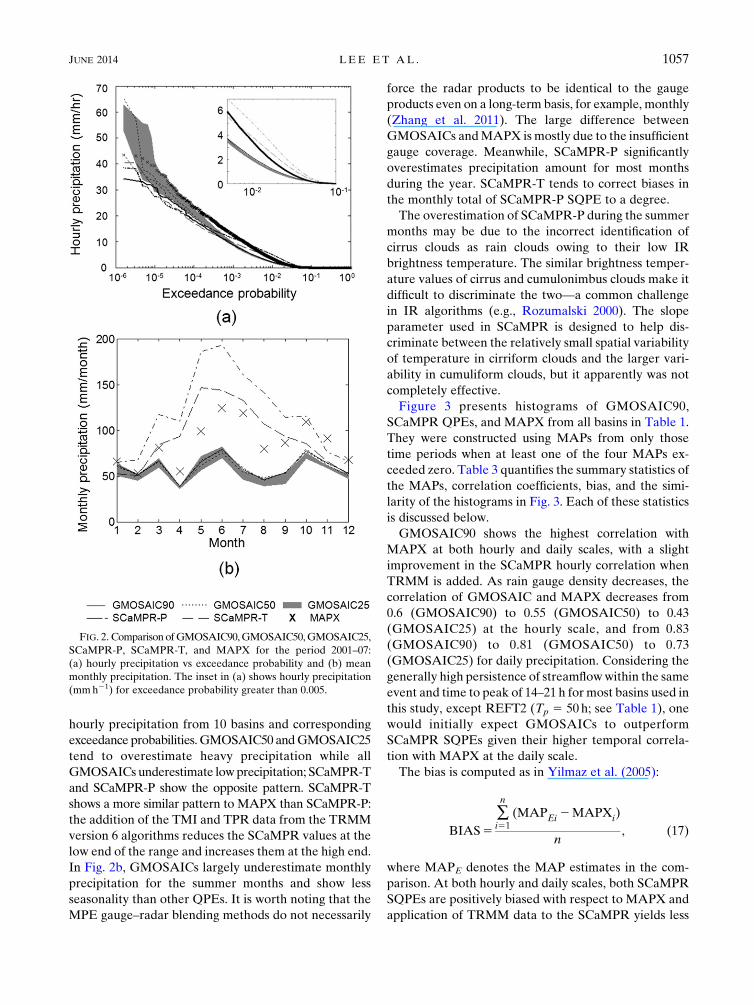
hourly precipitation from 10 basins and corresponding
exceedance probabilities.GMOSAIC50 andGMOSAIC25
tend to overestimate heavy precipitation while all
GMOSAICs underestimate lowprecipitation; SCaMPR-T
and SCaMPR-P show the opposite pattern. SCaMPR-T
shows a more similar pattern to MAPX than SCaMPR-P:
the addition of the TMI and TPR data from the TRMM
version 6 algorithms reduces the SCaMPR values at the
low end of the range and increases them at the high end.
In Fig. 2b, GMOSAICs largely underestimate monthly
precipitation for the summer months and show less
seasonality than other QPEs. It is worth noting that the
MPE gauge–radar blending methods do not necessarily
force the radar products to be identical to the gauge
products even on a long-term basis, for example, monthly
(Zhang et al. 2011). The large difference between
GMOSAICs andMAPX ismostly due to the insufficient
gauge coverage. Meanwhile, SCaMPR-P significantly
overestimates precipitation amount for most months
during the year. SCaMPR-T tends to correct biases in
the monthly total of SCaMPR-P SQPE to a degree.
The overestimation of SCaMPR-P during the summer
months may be due to the incorrect identification of
cirrus clouds as rain clouds owing to their low IR
brightness temperature. The similar brightness temper-
ature values of cirrus and cumulonimbus clouds make it
difficult to discriminate the two—a common challenge
in IR algorithms (e.g., Rozumalski 2000). The slope
parameter used in SCaMPR is designed to help dis-
criminate between the relatively small spatial variability
of temperature in cirriform clouds and the larger vari-
ability in cumuliform clouds, but it apparently was not
completely effective.
Figure 3 presents histograms of GMOSAIC90,
SCaMPR QPEs, and MAPX from all basins in Table 1.
They were constructed using MAPs from only those
time periods when at least one of the four MAPs ex-
ceeded zero. Table 3 quantifies the summary statistics of
the MAPs, correlation coefficients, bias, and the simi-
larity of the histograms in Fig. 3. Each of these statistics
is discussed below.
GMOSAIC90 shows the highest correlation with
MAPX at both hourly and daily scales, with a slight
improvement in the SCaMPR hourly correlation when
TRMM is added. As rain gauge density decreases, the
correlation of GMOSAIC and MAPX decreases from
0.6 (GMOSAIC90) to 0.55 (GMOSAIC50) to 0.43
(GMOSAIC25) at the hourly scale, and from 0.83
(GMOSAIC90) to 0.81 (GMOSAIC50) to 0.73
(GMOSAIC25) for daily precipitation. Considering the
generally high persistence of streamflowwithin the same
event and time to peak of 14–21 h for most basins used in
this study, except REFT2 (Tp 5 50 h; see Table 1), one
would initially expect GMOSAICs to outperform
SCaMPR SQPEs given their higher temporal correla-
tion with MAPX at the daily scale.
The bias is computed as in Yilmaz et al. (2005):
BIAS5
�n
i51
(MAPEi 2MAPXi)
n, (17)
where MAPE denotes the MAP estimates in the com-
parison. At both hourly and daily scales, both SCaMPR
SQPEs are positively biased with respect to MAPX and
application of TRMM data to the SCaMPR yields less
FIG. 2. Comparison ofGMOSAIC90,GMOSAIC50,GMOSAIC25,
SCaMPR-P, SCaMPR-T, and MAPX for the period 2001–07:
(a) hourly precipitation vs exceedance probability and (b) mean
monthly precipitation. The inset in (a) shows hourly precipitation
(mmh21) for exceedance probability greater than 0.005.
JUNE 2014 LEE ET AL . 1057

positively biased SQPE (see also Fig. 2b). On the con-
trary, the GMOSAICs are negatively biased: scenario-
mean bias 5 20.04mmh21 for both GMOSAIC50 and
GMOSAIC25 at the hourly scale (not shown), with
values of 20.89 and 20.99mmday21 for GMOSAIC50
and GMOSAIC25, respectively, at the daily scale (also
not shown).
The similarity in histograms between MAPX and
another QPE is measured by the Kolmogorov–Smirnov
(K–S) statistic (Lampariello 2000; Young 1977). It is
denoted as KSb in Table 3, where the subscript b denotes
the number of bins used to build a histogram:
KSb5 maxx
jFMAPX,b(x)2Fb(x)j . (18)
In the above, FMAPX,b(x) and Fb(x) are sample proba-
bility distribution functions computed from histograms
constructed fromMAPX and anotherQPE, respectively
(Young 1977). The KSb measures the maximum vertical
displacement between the two sample distribution func-
tions. Among GMOSAIC90 and SCaMPR SQPEs,
SCaMPR-T shows the smallest KS10 (i.e., 10 bins) and
KS20 (20 bins) at both hourly and daily scales (Table 3);
this indicates that ingesting TRMM data changes the
distribution of SCaMPR SQPE to be more similar to
that of MAPX.
Another measure of the similarity between histo-
grams is the difference in the mean of the distance be-
tween the sample mean at a bin and the center value of
that bin of a histogram, or Db:
Db 51
n�n
i51
jBi 2Cij21
m�m
i51
jBMAPX,i2Cij , (19)
where Bi denotes the mean of the QPE data in the ith
bin;BMAPX,i is the same asBi, but forMAPX;Ci denotes
the mean of the range used to define the ith bin; n is the
number of bins with more than a single data point; m is
the same as n, but for MAPX. The values of both D10
and D20 at hourly and daily scales are relatively small
compared to the width of each bin, which is 5.4 and
2.7mmh21 in the case of 10 and 20 bins for hourly QPE
and 21.1 and 10.5mmday21 in the case of 10 and 20 bins
for daily QPE, respectively. This indicates that, on the
average, the bin-to-bin mean of GMOSAIC90 and
SCaMPR SQPEs data are highly similar to that for
MAPX despite differences in the number of QPE data
points in each bin. It is also worth noting that theD10 and
D20 values for SCaMPR decrease when TRMM is in-
gested (i.e., the average value of SCaMPR in each bin
decreases), which is consistent with the drying trend in
the bias statistic.
4. Results and discussion
The SAC-SMAmodel simulations are generated with
two sets of model parameters and UH obtained via
FIG. 3. Histograms of MAPs at (a) hourly and (b) daily scale; the
values on the x axis represent the center of the range of values in
each bin.
TABLE 3. Statistics between MAPX and GMOSAIC90 or
SCaMPRSQPEs. In the table,G90, P, andT denoteGMOSAIC90,
SCaMPR-P, and SCaMPR-T, respectively. Similarly to Fig. 3,
histogram-based statistics are calculated using selected MAPs un-
der the condition that one of MAPs at a given time exceeds zero
precipitation. The BIAS, D10, and D20 have the unit of (mmh21) in
the case of hourly MAPs and (mmday21) in the case of daily MAPs.
Statistics
Hourly precipitation Daily precipitation
G90 P T G90 P T
Time series–based statistics
BIAS 20.04 0.04 0.01 20.87 1.05 0.21
CR 0.60 0.52 0.53 0.83 0.70 0.70
Histogram-based statistics
D10 20.05 0.24 20.29 0.63 0.67 0.26
D20 20.03 0.02 20.05 20.004 20.02 20.16
KS10 0.014 0.014 0.004 0.025 0.030 0.006
KS20 0.023 0.037 0.014 0.035 0.039 0.010
1058 JOURNAL OF HYDROMETEOROLOGY VOLUME 15

calibrating the model using either MAPX or the corre-
sponding quantitative precipitation estimate. The use of
MAPX-driven model parameters and UH in the SAC-
SMA model simulations driven by other QPEs may be
justified as follows:MAPX is known to bemore accurate
than most, if not all, other QPEs and serves the opera-
tional reference; hence,MAPX-drivenmodel parameters
and UH may also be considered more representative for
the basin of interest than those derived with any other
QPEs. In this section, we comparatively evaluate the
model performance for simulating flood events for 10
Texas basins, using two sets ofmodel parameters andUH
as well as different QPEs. Flood events are selected using
flood warning discharge (QW) in Table 1 as a threshold;
flood warning discharge (QW) is the precursor of river
conditions evolving to flood stage, requiring proper at-
tentions by operational forecasters. Throughout the
evaluation, the dataset for year 2000 is used for themodel
spinup, 2001–04 for calibration, and 2005–07 for valida-
tion. It is worth mentioning that correcting biases in the
forcing data via AB_OPT [Eqs. (1)–(3)] noticeably im-
proved the long-term bias in simulated flow prior to the
calibration of SAC parameters and UH ordinates [Eqs.
(4)–(9)]. For instance, the multibasin mean of bias in the
flow simulation for the calibration period changed from
0.62 to 0.91 for GMOSAIC90, 1.52 to 0.97 for SCaMPR-P,
0.86 to 0.94 for SCaMPR-T, and 1.19 to 1.09 for MAPX,
where the bias is calculated as the ratio of total simulated
flow for the period of interest to the total observed flow for
the same period. For the validation period, the multibasin
mean bias changed from 0.75 to 1.17 for GMOSAIC90,
1.69 to 1.11 for SCaMPR-P, 1.09 to 0.99 for SCaMPR-T,
and 1.31 to 1.18 for MAPX.
a. Evaluation of flood prediction
The suitability of each QPE for SAC-SMA model
simulations and the relative performance of QPEs are
assessed in terms of the skill in detecting high-flow
events, the error in the simulation of flow magnitude
and timing, and the overall simulation accuracy. To cal-
culate EP, ET, WEP, and WET, we used the observed
flows exceeding flood warning discharge (QW in Table 1).
Calculation of POD, FAR, and HSS includes the period
of time when either observed or simulated flows exceed
QW. The threshold streamflows (QT) used in the calcu-
lation of POD, FAR, and HSS are QW,
2
3QW 1
1
3QF ,
1
3QW 1
2
3QF ,
and QF. Table 4 summarizes the number of events ex-
ceeding floodwarning discharge (QW) or flood discharge
(QF) for the calibration (2001–04) and validation (2005–
07) periods, separately, for each basin.
Overall model performance for flood prediction is
evaluated in terms of multibasin mean (Table 5) and
interbasin variability (Fig. 5) of the statistics used. Table 5
shows statistics averaged over 10 basins, includingMAPX
results as the benchmark. Values in bold denote the QPE
(among SCaMPR SQPEs and GMOSAICs) showing the
best results given the performance measure and calibra-
tion method used. Table 5 can be summarized as follows:
overall, MAPX performs as well as or better than
GMOSAICs and SCaMPR SQPEs for all statistics used.
GMOSAICs generally show a higher POD range than
does SCaMPR SQPE, though the high FAR(QF) of
GMOSAIC25 cancels out the benefit of the high POD
(QF), resulting in lowHSS(QF) for that particular dataset.
Compared to the model simulations using MAPX-
driven parameter and UH, individual QPE calibration
1) generally increases POD(QF) of GMOSAICs,
2) generally decreases FAR(QW) for SCaMPR SQPEs,
3) produces lower RMSE and EP and marginal im-
provement in ET, and 4) generally improves HSS(QF)
for the validation period for both SCaMPR SQPEs and
GMOSAICs. The models with individual QPE calibra-
tion generally outperform the model calibrated using
the most accurate QPE (i.e., MAPX), which is consis-
tent with other studies (e.g., Artan et al. 2007; Bitew and
Gebremichael 2011b; Stisen and Sandholt 2010; Yilmaz
et al. 2005).
The sensitivity of the model performance to the cali-
bration approach is more objectively represented by the
percentage improvement after changing from using
MAPX-driven parameters and UH to the calibration
using corresponding QPEs (Fig. 4). Compared to the
model using MAPX-driven model parameter and UH,
individual QPE calibration generally improves both
GMOSAIC and SCaMPR SQPE results for most sta-
tistics for the validation period, especially HSS(QF).
SCaMPR SQPEs, particularly SCaMPR-P, benefited less
TABLE 4. The number of events exceeding flood warning dis-
charge (NW) and flood discharge (NF) for the calibration and val-
idation periods.
Basin ID
Calibration (2001–04) Validation (2005–07)
NW NF NW NF
GNVT2 28 24 34 28
LYNT2 32 6 24 3
MCKT2 12 8 23 13
MDST2 19 6 14 4
MTPT2 39 15 28 13
QLAT2 26 20 27 20
REFT2 7 4 5 1
SBMT2 22 16 8 5
SCDT2 6 6 3 3
SDAT2 17 3 3 2
JUNE 2014 LEE ET AL . 1059

from individual QPE calibration in terms of POD and
HSS for the calibration period. The multibasin mean
HSS of SCaMPR-P for the calibration period is reduced
by more than 20% after changing the calibration
method (see related discussions at the end of the pre-
vious paragraph).
Figure 5 presents plots of selected quantiles (median
and 25th and 75th quantiles) in two-dimensional space
spanned by two evaluation statistics, characterizing the
interbasin variability of model performance statistics. In
Fig. 5, HSS quantifies the model skill in detecting se-
lected flood events, RMSE shows the overall model
performance for the entire simulation period, POD and
FAR show the skill in correctly or falsely detecting high
flow events at the threshold QW, and WEP and WET
represent errors in the simulation of peak flow and time
to peak in a dimensionless domain. Figure 5 may be
summarized as follows: GMOSAICs generally show
bigger interquartile ranges (IQRs) for both RMSE and
POD than SCaMPR for both the calibration and vali-
dation periods due possibly to the large variations in
GRF among basins (Table 2). SCaMPR-P generally
performs worse than other QPEs for all statistics com-
pared. Compared to other QPEs, the relatively large
positive bias present in SCaMPR-P SQPE across mul-
tiple time scales (Figs. 2b and 3c,d) and its under-
estimation of heavy precipitation (Fig. 2a) may prevent
improvement acrossmultiple statistics beyond those (EP
andWEP) associated with objective functions used. The
performance of GMOSAICs for the validation period is
generally better than the calibration period, possibly
because of increased gauge density during the validation
period (Zhang et al. 2013).
The ability of the hydrologic model to correctly detect
the occurrence of flows exceeding QT is further exam-
ined using weighted POD, FAR, and HSS evaluated at
four different QT, that is, QW,
2
3QW 1
1
3QF ,
1
3QW 1
2
3QF ,
and QF (Fig. 6). The number of events for each basin
(NW, Table 4) is used as a weight for POD, FAR, and
HSS evaluated at individual basin in order to remove
sampling effects; for example, weighted POD 5 �10i51
(NW,iPODi)/�10i51NW,i, where i denotes the ith basin.
The result from the case of using MAPX-driven pa-
rameters and UH is not shown owing to its similarity to
TABLE 5. Multibasin mean statistics based on SAC-SMA simulations for 10 Texas basins where G90, G50, G25, P, and T denote
GMOSAIC90, GMOSAIC50, GMOSAIC25, SCaMPR-P, and SCaMPR-T, respectively. Bold font indicates the QPE (among SCaMPR
SQPEs and GMOSAICs) showing the best performance given the performance measure and the calibration method used.
Statistics
MAPX parameter and UH
MAPX
Individual QPE calibration
G90 G50 G25 P T G90 G50 G25 P T
Calibration (2001–04)
POD(QW) 0.47 0.4 0.44 0.36 0.35 0.62 0.52 0.47 0.47 0.3 0.32
POD(QF) 0.39 0.29 0.38 0.3 0.33 0.56 0.48 0.38 0.44 0.22 0.28
FAR(QW) 0.24 0.3 0.33 0.26 0.34 0.23 0.28 0.3 0.32 0.23 0.24
FAR(QF) 0.31 0.37 0.47 0.35 0.49 0.36 0.33 0.43 0.45 0.32 0.31HSS(QW) 0.21 0.15 0.14 0.19 0.16 0.29 0.21 0.15 0.14 0.15 0.15
HSS(QF) 0.26 0.15 0.16 0.21 0.19 0.35 0.26 0.22 0.23 0.15 0.18
EP 101 111 118 117 117 75 99 103 103 117 110
ET 9.3 11 14.3 14.8 14.9 10.1 10.2 11.6 13.9 16.1 15.3
WEP 0.75 0.82 1 1.02 1.02 0.65 0.79 0.79 0.84 0.91 0.87
WET 0.52 0.59 0.76 0.82 0.81 0.54 0.56 0.61 0.75 0.88 0.83
RMSE 16 17 21 20 20 13 15 16 18 18 18
Validation (2005–07)
POD(QW) 0.57 0.58 0.65 0.27 0.32 0.67 0.62 0.59 0.65 0.26 0.34
POD(QF) 0.57 0.53 0.62 0.27 0.28 0.56 0.65 0.55 0.65 0.26 0.29
FAR(QW) 0.3 0.25 0.3 0.35 0.31 0.16 0.28 0.27 0.3 0.24 0.29
FAR(QF) 0.38 0.3 0.42 0.45 0.47 0.14 0.34 0.36 0.39 0.39 0.38
HSS(QW) 0.25 0.23 0.2 0.06 0.07 0.31 0.25 0.23 0.2 0.08 0.07
HSS(QF) 0.28 0.33 0.27 0.12 0.1 0.43 0.36 0.35 0.34 0.13 0.14
EP 84 85 130 113 117 75 76 77 116 110 107
ET 11.8 12.8 13.6 12.9 13.4 9.1 12 12.2 14 12.4 11.8
WEP 0.69 0.69 1.02 0.97 1.05 0.7 0.71 0.71 0.94 0.83 0.85
WET 0.64 0.69 0.73 0.72 0.74 0.49 0.63 0.64 0.74 0.72 0.66
RMSE 14 15 24 19 21 10 14 14 21 16 17
1060 JOURNAL OF HYDROMETEOROLOGY VOLUME 15

the result generated from individual QPE calibration. In
Fig. 6, GMOSAICs show consistently superior perfor-
mance relative to SCaMPR SQPEs in terms of POD at
four QT used. SCaMPR-T generally outperforms
SCaMPR-P in terms of POD, FAR, and HSS. As pre-
viously shown in Table 5, GMOSAIC25 tends to over-
estimate high flows, resulting in higher FAR than
GMOSAIC90 and 50 for both calibration and validation
periods, and POD similar to GMOSAIC90 but higher
than GMOSAIC50 for both calibration and validation
periods. A sharp rise in FAR from QW to
2
3QW 1
1
3QF
indicates the presence of a number of events in this
range that themodel overestimates. Overall, POD tends
to decrease as QT increases but, to some extent, the
opposite occurs for FAR and HSS, especially for the
calibration period. In comparison to the calibration re-
sults, POD, FAR, and HSS of GMOSAICs for the val-
idation period are noticeably improved. This could be
explained by the increased gauge density during the
validation period as discussed earlier.
Table 6 and Fig. 7 compare SCaMPR SQPEs and
GMOSAICs at the individual basin level. Table 6
indicates basins with SCaMPR SQPEs performing as
well as or better than GMOSAICs in terms of skill in
detecting the occurrence of flood events when the
model is calibrated using the corresponding QPE. In
Table 6, there is a tendency, to some degree, for
SCaMPR SQPE to perform equal to or better than
GMOSAICs for basins with lower GRF or larger
FIG. 4. Percentage improvement in the multibasin mean of sta-
tistics due to individual QPE calibration, in reference to the case of
using MAPX-driven parameter and UH, where d, u, D, P, and T
denote GMOSAIC90, GMOSAIC50, GMOSAIC25, SCaMPR-P,
and SCaMPR-T, respectively; P(QT), F(QT), andH(QT) represent
POD, FAR, and HSS at the threshold streamflowQT, respectively.
Scenario mean is used in the case of GMOSAIC50 and 25.
FIG. 5. Interbasin variability of model performance statistics in
the case of individual QPE calibration: (a),(b) HSS(QF) vs RMSE
of streamflow, (c),(d) POD(QW) vs FAR(QW), and (e),(f) WEP vs
WET. Symbols denote the location of the median of corresponding
QPE and bars represent interquartile range (IQR), that is, the
range of 25th and 75th quantiles.
JUNE 2014 LEE ET AL . 1061

FIG. 6. Weighted POD, FAR, and HSS as a function of streamflow threshold (QT) in the
case of the model calibrated using corresponding QPE where QW and QF denote flood
warning and flood discharge, respectively (see Table 1). In the figure, d, u, D, P, T, and X
denoteGMOSAIC90,GMOSAIC50,GMOSAIC25, SCaMPR-P, SCaMPR-T, andMAPX,
respectively. The number of events for each basin (NW, Table 4) is used as a weight to POD,
FAR, and HSS evaluated at individual basin.
1062 JOURNAL OF HYDROMETEOROLOGY VOLUME 15

drainage areas, for example, REFT2, SCDT2, SBMT2,
and MDST2. The latter (i.e., SCaMPR SQPE per-
forming equal to or better than GMOSAIC for larger
basins) implies the possibility that SQPE application to
rainfall–runoff modeling is more appropriate for larger
basins with longer travel time, mitigating the impact of
finescale errors in the satellite QPE (these errors also
may be averaged out during the calculation of mean
areal precipitation at a larger spatial scale; Steiner et al.
2003). In addition to random error, some of these fi-
nescale errors result from the spatial displacement
between cold cloud pixels and the corresponding sur-
face rainfall produced by shear and other factors;
however, an accurate modeling of this error in real time
thus far has been elusive. On the other hand, it is worth
noting that the skill of GMOSAICs increased at a much
higher rate than SCaMPR SQPEs with increasing
temporal aggregation, a feature illustrated in the MAP
evaluation study (Zhang et al. 2013). It may be possible
that the errors in SQPEs are serially correlated, which
slows the improvement in accuracy with coarsening of
temporal resolution, but significant additional study
would be required to quantify the effects. Application
of TRMM data to SCaMPR makes SQPE outperform
GMOSAICs for some basins (e.g., MDST2) where
SCaMPR-P underperforms compared to GMOSAICs;
however, the opposite also occurs in some cases, as
shown in Table 6.
Similarly to Table 6, Fig. 7 also compares the perfor-
mance of SCaMPR SQPEs to that of GMOSAICs, but
in terms of the error ratio on flow timing and amplitude
calculated using observed and simulated flow for the
validation period in the case of individual QPE cali-
bration. SCaMPR SQPE outperforms GMOSAIC if
the error ratio is less than 1, and the opposite is true if
the error ratio is greater than 1. In Fig. 7, GMOSAICs
generally outperform SCaMPR SQPEs, which become
more pronounced as GRF increases. There are certain
cases with SCaMPR SQPEs outperforming GMOSAICs,
especially in the cases of the WET (Fig. 7b) and RMSE
(Fig. 7c) error ratios for large basins. This is consistent
with results previously presented in Table 6.
b. Model performance as a function of gaugereporting frequency, runoff coefficient, anddrainage area
Correlation of model performance statistics and basin
characteristics (drainage area, CR, and GRF) is examined
in this subsection, with the correlation range given in pa-
rentheses.Here, we summarize themain observations from
the analysis. Individual QPE model calibration generally
yielded higher correlation between the performance
TABLE 6. The number of basins with SCaMPR SQPEs performing as well as or better than GMOSAICs in the case of the model
calibrated using corresponding QPE. In the table, G90, G50, G25, P, and T denote GMOSAIC90, GMOSAIC50, GMOSAIC25,
SCaMPR-P, and SCaMPR-T, respectively. For G50 and G25, scenario mean is used in the comparison, and NW denotes the number of
events exceeding flood warning discharge. Bold font is used for the case of NW equal to or greater than 8.
Basin in order of increasing gauge report frequency
NW (cal/val) REFT2 SCDT2 MTPT2 MDST2 SBMT2 SDAT2 LYNT2 GNVT2 QLAT2 MCKT2
Statistics QPE 7/5 6/3 39/28 19/14 22/8 17/3 32/24 28/34 26/27 12/23
Calibration (2001–04)
POD(QF) G90 P,T P,T TG50 P,T P,T P,T
G25 P,T P,T
FAR(QF) G90 P,T P,T T P,T P,T P,T
G50 P,T P,T T P,T P,T P,T PG25 P,T P,T P,T T P,T P,T P,T P
HSS(QF) G90 P,T P,T T P,T
G50 P,T P,T P,T P,T P
G25 P,T P,T T T P,T
Validation (2005–07)
POD(QF) G90 P,T P,T
G50 P,T P,T
G25 P,T T
FAR(QF) G90 P,T P,T P,T P P P
G50 P,T P,T P,T P P P
G25 P,T P,T P,T PHSS(QF) G90 T P,T P
G50 T P
G25 P
JUNE 2014 LEE ET AL . 1063

statistics and GRF, CR, and drainage area than calibrating
the hydrologic model using MAPX. GMOSAICs show
noticeably high negative correlation of GRF and ET for
both the calibration (20.49 to20.81) and validation (20.22
to 20.73) periods based on both calibration results; the
correlation of GRF and RMSE for GMOSAICs also in-
dicates a pattern similar to that of GRF andET. Among all
statistics used, EP from both calibration results shows
consistently high correlation with GRF, CR, and drainage
area for all QPEs used, indicating that the accuracy of peak
flow simulation is largely affected by gauge density (in the
case of GMOSAIC) or by basin hydrologic characteristics.
Both calibration results show the positive correlation ofET
and drainage area for all QPEs compared (calibration pe-
riod: 0.51–0.65 forGMOSAICs and 0.21–0.58 for SCaMPR
SQPEs; validation period: 0.53–0.81 for GMOSAICs and
0.10–0.28 for SCaMPR SQPEs). This reflects larger un-
certainty associated with the empirical unit hydrographs
estimated for larger basins where the eminent spatial het-
erogeneity of precipitation makes it difficult to hold the
assumptions of unit hydrograph theory. It is found that EP
decreaseswith increases in bothGRF (20.48 to20.71) and
CR (20.40 to 20.76), but the opposite is true for drainage
area (0.36–0.88) based on both calibration and validation
results from the two calibration methods used; similar re-
sults are also found for RMSE. This indicates that the
overall model performance tends to be better for smaller,
wetter basins.
Figure 8 presents POD(QW) as a function of GRF or
drainage area in the left panels and the difference in
POD(QW) between GMOSAIC and SCaMPR SQPE in
the right panels for the calibration period in the case of
individual QPE calibration. Note in Fig. 8a that GRF of
GMOSAIC90 is used as the x coordinate for the POD
values of SCaMPR-P and SCaMPR-T and MAPX.
There is some noticeable pattern between POD(QW)
and basin characteristics. The superior performance of
GMOSAICs over SCaMPR SQPEs in terms of POD
(QW) becomes clearer with increasing GRF (Fig. 8b;
separate calculations show a correlation between the
POD difference and GRF ranging from 0.18 to 0.67
depending on whichQPE is used) and, to a lesser extent,
decreasing drainage area (Fig. 8d; POD difference and
drainage area have a correlation coefficient of 20.11 to
20.42) and increasing CR (not shown; correlation of the
POD difference and CR: 0.09 to 0.35).
5. Conclusions and future directions
In this study, we seek to complement existing studies
that evaluate the quality of TRMM-based multisatellite
quantitative precipitation estimates and their potential
for hydrologic predictions (Bitew andGebremichael 2011a;
FIG. 7. Performance comparison between SCaMPR SQPE and
GMOSAIC in terms of the error ratio calculated using flow gen-
erated fromSAC-SMAmodel simulations for the validation period
(2005–07) in the case of calibrating the model using corresponding
QPE. Lines connect individual basins at different gauge report
frequency (Table 2) where scenario mean is used for GMOSAIC50
and 25. Numbers (1–10) assigned to each line denote the inverse
rank of drainage area (Table 1): that is, 1 for the smallest and 10 for
the largest basin. In (a) and (c), QLAT2 (1) shows smaller values of
error ratio than GNVT2 (2) for both solid and dotted lines. In (c),
both solid and dotted lines in the case of SCDT2 (9) are completely
overlaid.
1064 JOURNAL OF HYDROMETEOROLOGY VOLUME 15

Hossain and Anagnostou 2004; Kuligowski et al. 2013;
Pan et al. 2010; Su et al. 2008; Zhang et al. 2013) by fo-
cusing on two outstanding science issues that have been
overlooked: 1) the relative strength of SQPEs versus
gauge-only analysis for hydrologic model predictions,
and the impacts of TRMM, and 2) the future GPM data
(i.e., the GMI and GPR) alone on the quality of SQPEs
and the predictive accuracy of hydrologic models. A
rigorous set of calibration/validation experiments were
carried out using the NWS lumped hydrologic model,
whose good performance was demonstrated in theDMIP
experiments (Reed et al. 2004; Smith et al. 2012). An-
other unique aspect of the work is that we employ a la-
tency product and mimic the data simulation methods
FIG. 8. (a),(c) POD(QW) and (b),(d) difference in POD(QW) between GMOSAICs and
SCaMPRSQPEs as a function of GRF or drainage area for the calibration period in the case of
calibrating the model using corresponding QPE. In (a), GRF for GMOSAIC90 is used to plot
P, T, and X.
JUNE 2014 LEE ET AL . 1065

used at forecast centers so that our work yields in-
formation immediately useful for real-time operational
forecasters. Besides, headwater basins used in this study
show the time to peak flow of mostly less than a day,
which requires a fine model time step (e.g., hourly) as
used in this study, in addition to short data latency in
order to issue flash flood forecasts in a timely fashion.
Previous studies have assessed the utility of TRMM-
based SQPEs on a coarse time step (e.g., daily) that may
not be appropriate for evaluating the utility of SQPEs
for forecasting floods for fast-responding basins (Bitew
and Gebremichael 2011a; Pan et al. 2010; Su et al. 2008).
The comparisons of simulation results between the
gauge-only analyses (GMOSAICs) and the two SCaMPR
products reveals that the former, even when based on the
thinnest gauge network tested, outperforms the latter for
a majority of catchments. As the characteristic response
of most of the study catchments is longer than 6h, the
superior performance of GMOSAICs is unsurprising:
the results from Zhang et al. (2013) point to the fact that
the accuracy of gauge-only analysis improves rapidly with
temporal aggregation and is in general better than
SCaMPRQPEs beyond the 3-h scale. In the meantime, it
should be noted that SCaMPR QPEs do exhibit higher
skill in a minority of catchments where gauge density is
lower and where fewer flood events were reported during
the study period. It is possible that further thinning of the
gauge network would allow the SCaMPR QPEs to out-
perform the gauge-only analysis. Further experiments, in
drier catchmentswith a thinner gauge network and longer
simulated and observed flow records, would be beneficial
to establish the critical gauge density and hydroclimatic
characteristics that yield differential performance of the
satellite and gauge-only QPEs.
The comparisons of SCaMPR products without and
with TRMM ingest point to broad improvements in the
accuracy of the streamflow simulations after TRMM
ingest. Themost conspicuous improvement is seen in the
detection of floods: the model runs using SCaMPRQPE
with TRMM ingest consistently exhibited higher prob-
ability of detection (POD) for floods at different
thresholds than those without TRMM ingest. On the
other hand, the effects on false alarms are mixed—the
false alarm rate (FAR) is in fact slightly higher after
TRMM ingest at higher streamflow thresholds. Though
TRMM ingest in this experiment does not enhance the
streamflow simulations to the extent that they become
comparable with/superior to gauge-based results, it does
manage to narrow the performance gap. Thus, it is fair to
state that the incomingGPMdata could at least improve
the streamflow simulation in areas where satellite QPEs
are necessary owing to the scarcity of ground-based
precipitation observations.
The results from two calibration strategies yielded
additional insights to the effects of calibration under
uncertain forcing inputs. First, it is evident that hydro-
logic model calibration is often unable to completely
offset the inaccuracy in QPE, and deficiencies in QPE
accuracy are reflected in streamflow forecasts even after
calibration (Borga 2002; Carpenter and Georgakakos
2004). Among all the QPE inputs, it is the operational
WGRFC MQPE—arguably the most accurate one—
that yielded the overall highest POD and HSS for both
calibration and validation periods. Calibration against
each individual QPE was able to improve the perfor-
mance in a quantitative fashion, but its effects were in-
sufficient to alter the relative rank of simulations driven
by various QPEs for either period. In fact, as judged by
the results for the calibration periods, there appears to
be a limit to the quantitative improvements achievable
by calibration. Although the overall forcing bias correc-
tion scheme used in AB_OPT captures the overall water
balance based on observed flow, it may not properly ac-
count for time-varying, magnitude-dependent biases in
different QPEs (such as those induced by the precession
of the TRMM inputs to SCaMPR or the reduction of
availableMW rain rate estimates for calibration in winter
due to snow cover). Although a more intelligent, robust
calibration approach could further help mitigate the de-
ficiency ofQPEs, improving satelliteQPEquality, at least
for the near future, remains a paramount issue for im-
proving their operational utility.
Although the study shows that satellite QPEs, in
particular SCaMPRQPEs, are still not as competitive as
gauge-only analyses, it must be noted that there remain
options for further enhancing theseQPEs. These options
include ground-sensor-based bias correction (Gruber et al.
2000; Xie et al. 2007) and/or optimalmerging of satellite-
based QPE with ground-sensor-based QPEs (Chiang
et al. 2007). In addition, ongoing improvement in the
retrieval algorithms could further improve the overall
quality of microwave-based QPEs and thereby benefit
the accuracy of multisensor products such as SCaMPR
and CMORPH. Also promising is the Integrated Multi-
Satellite Retrievals for GPM (IMERG) product, which
combines the strengths of CMORPH, TMPA, and
PERSIANN (Huffman et al. 2013). Despite their longer
latency, these products could potentially be useful for
model calibration and state adjustments and therefore
help improve the accuracy of the flood forecast in re-
gions such as the Rio Grande. As an example, Fig. 9
compares the HSS in simulating high flows using
CMORPH SQPE with the HSS from SCaMPR SQPEs,
assuming no data latency in CMORPH SQPE. In Fig. 9,
CMORPH SQPE is shown to perform better than
SCaMPR SQPEs with the increase of a streamflow
1066 JOURNAL OF HYDROMETEOROLOGY VOLUME 15

threshold, implying the potential usefulness of using
CMORPH and perhaps the GPM IMERG product
for streamflow estimation in a retrospective setting.
In future work, the trade-offs between latency and
accuracy of SQPE products will be more closely
evaluated to determine a paradigm for incorporating
long-latency products for hydrologic operations at the
forecast centers.
Further research should also be directed toward
obtaining accurate, quantitative descriptions of the rel-
ative effects of errors associated with hydrologic model
structure, initial soil moisture conditions, and forcing
data. A systematic, thorough quantification of errors in
satellite QPEs and a rigorous investigation on the in-
terdependency among parameters and variables in
multidimensional space will be beneficial to shed light
on how to effectively integrate the satellite QPEs for
both lumped and distributed model-based flood and
water resource predictions.
Acknowledgments. This work was supported by the
NOAA/NESDIS/Office of Systems Development via
support for a NASA Precipitation Measurement Mis-
sions (PMM) project. We appreciate the West Gulf
River Forecast Center (WGRFC) for providing the
multisensor QPE dataset as well as basin definitions.
Dongsoo Kim provided the rain gauge data obtained
from theHydrometeorological AutomatedData System
(HADS). The SSM/I and TRMM TMI and PR rainfall
rate data were obtained online from the NOAA Com-
prehensive Large-Array-Data Stewardship System
(CLASS) at www.class.ncdc.noaa.gov. The AMSU rain
rates were obtained from Mr. Wanchun Chen and
Mr. Ralph Ferraro at NOAA/NESDIS. We are grateful
to Pedro Restrepo, Dongsoo Kim, the editor, and three
anonymous reviewers for providing helpful comments.
The contents of this paper are solely the opinions of the
authors and do not constitute a statement of policy,
decision, or position on behalf of NOAA or the U.S.
Government.
REFERENCES
Artan, G., H. Gadain, J. Smith, K. Asante, C. Bandaragoda, and
J. Verdin, 2007: Adequacy of satellite-derived rainfall data for
streamflow modeling. Nat. Hazards, 43, 167–185, doi:10.1007/
s11069-007-9121-6.
Behrangi, A., B. Khakbaz, T. C. Jaw, A. AghaKouchak, K. Hsu,
and S. Sorooshian, 2011: Hydrologic evaluation of satellite
precipitation products over a mid-size basin. J. Hydrol., 397,
225–237, doi:10.1016/j.jhydrol.2010.11.043.
Bitew,M.M., andM.Gebremichael, 2011a: Assessment of satellite
rainfall products for streamflow simulation in medium wa-
tersheds of the Ethiopian highlands. Hydrol. Earth Syst. Sci.,
15, 1147–1155, doi:10.5194/hess-15-1147-2011.
——, and——, 2011b: Evaluation of satellite rainfall products through
hydrologic simulation in a fully distributed hydrologic model.
Water Resour. Res., 47, W06526, doi:10.1029/2010WR009917.
Borga, M., 2002: Accuracy of radar rainfall estimates for
streamflow simulation. J. Hydrol., 267, 26–39, doi:10.1016/
S0022-1694(02)00137-3.
Burnash, R. J. C., R. L. Ferral, and R. A. McGuire, 1973: A gen-
eralized streamflow simulation system: Conceptual modelling
for digital computers. Joint Federal-State River Forecast
Center Tech. Rep., Department of Water Resources, State of
California and National Weather Service, 204 pp.
Carpenter, T. M., and K. P. Georgakakos, 2004: Impacts of para-
metric and radar rainfall uncertainty on the ensemble
FIG. 9. As in Fig. 6, but for the case of weighted HSS only where CMORPH (C) SQPE is
compared with SCaMPR SQPEs.
JUNE 2014 LEE ET AL . 1067

streamflow simulations of a distributed hydrologic model.
J. Hydrol., 298, 202–221, doi:10.1016/j.jhydrol.2004.03.036.
Chiang, Y.-M., K.-L. Hsu, F.-J. Chang, Y.Hong, and S. Sorooshian,
2007: Merging multiple precipitation sources for flash
flood forecasting. J. Hydrol., 340, 183–196, doi:10.1016/
j.jhydrol.2007.04.007.
Chow, V. T., 1964: Handbook of Applied Hydrology. McGraw-
Hill, 1467 pp.
Crum, T. D., and R. L. Alberty, 1993: The WSR-88D and the
WAR-88D operational support facility. Bull. Amer. Meteor.
Soc., 74, 1669–1687, doi:10.1175/1520-0477(1993)074,1669:
TWATWO.2.0.CO;2.
Daly, C., R. P. Neilson, and D. L. Phillips, 1994: A statistical-
topographic model for mapping climatological precipitation
over mountainous terrain. J. Appl. Meteor., 33, 140–158,
doi:10.1175/1520-0450(1994)033,0140:ASTMFM.2.0.CO;2.
Doswell, C. A., III, R. Davies-Jones, and D. L. Keller, 1990: On
summary measures of skill in rare event forecasting based on
contingency tables. Wea. Forecasting, 5, 576–585, doi:10.1175/
1520-0434(1990)005,0576:OSMOSI.2.0.CO;2.
Ferraro, R. R., 1997: Special sensor microwave imager derived
global rainfall estimates for climatological applications.
J. Geophys. Res., 102, 16 715–16 735, doi:10.1029/97JD01210.
Fulton, R. A., J. P. Breidenbach, D.-J. Seo, D. A. Miller, and
T. O’Bannon, 1998: The WSR-88D rainfall algorithm. Wea.
Forecasting, 13, 377–395, doi:10.1175/1520-0434(1998)013,0377:
TWRA.2.0.CO;2.
Gebregiorgis, A. S., and F. Hossain, 2012: Understanding the de-
pendence of satellite rainfall uncertainty on topography and
climate for hydrologic model simulation. IEEE Trans. Geosci.
Remote Sens., 51, 704–718, doi:10.1109/TGRS.2012.2196282.
——, Y. Tian, C. D. Peters-Lidard, and F. Hossain, 2012: Tracing
hydrologic model simulation error as a function of satellite
rainfall estimation bias components and land use and land
cover conditions.Water Resour. Res., 48,W11509, doi:10.1029/
2011WR011643.
Gourley, J. J., and B. E. Vieux, 2005: A method for evaluating the
accuracy of quantitative precipitation estimates from a hy-
drologic modeling perspective. J. Hydrometeor., 6, 115–133,
doi:10.1175/JHM408.1.
——, Y. Hong, Z. L. Flamig, J. Wang, H. Vergara, and E. N.
Anagnostou, 2011: Hydrologic evaluation of rainfall estimates
from radar, satellite, gauge, and combinations onFt. CobbBasin,
Oklahoma.J.Hydrometeor.,12,973–988,doi:10.1175/2011JHM1287.1.
Gruber, A., X. Su, M. Kanamitsu, and J. Schemm, 2000: The
comparison of two merged rain gauge–satellite precipitation
datasets.Bull. Amer. Meteor. Soc., 81, 2631–2644, doi:10.1175/
1520-0477(2000)081,2631:TCOTMR.2.3.CO;2.
Habib, E., L. Qin, D.-J. Seo, G. J. Ciach, and B. R. Nelson, 2013:
Independent assessment of incremental complexity in theNWS
multisensor precipitation estimator algorithms. J. Hydrol. Eng.,
18, 143–155, doi:10.1061/(ASCE)HE.1943-5584.0000638.
Hong, Y., K. L. Hsu, S. Sorooshian, and X. G. Gao, 2004: Pre-
cipitation estimation from remotely sensed imagery using an
artificial neural network cloud classification system. J. Appl.
Meteor., 43, 1834–1852, doi:10.1175/JAM2173.1.
Hossain, F., and E. N. Anagnostou, 2004: Assessment of current
passive-microwave- and infrared-based satellite rainfall re-
mote sensing for flood prediction. J. Geophys. Res., 109,
D07102, doi:10.1029/2003JD003986.
Huffman, G. J., R. F. Adler, D. T. Bolvin, G. Gu, E. J. Nelkin, K. P.
Bowman, E. F. Stocker, and D. B. Wolff, 2007: The TRMM
Multisatellite Precipitation Analysis (TMPA): Quasi-global,
multiyear, combined-sensor precipitation estimates at fine
scale. J. Hydrometeor., 8, 38–55, doi:10.1175/JHM560.1.
——, ——, ——, and ——, 2010: The TRMM Multisatellite Precip-
itation Analysis (TMPA). Satellite Applications for Surface Hy-
drology, F. Hossain and M. Gebremichael, Eds., Springer, 3–22.
——, D. T. Bolvin, D. Braithwaite, K. Hsu, R. Joyce, and P. Xie,
2013: NASA Global Precipitation Measurement (GPM) In-
tegrated Multi-satellitE Retrievals for GPM (IMERG). Al-
gorithm Theoretical Basis Doc., version 4.1, NASA, 29 pp.
[Available online at http://pmm.nasa.gov/sites/default/files/
document_files/IMERG_ATBD_V4.1.pdf.]
Iguchi, T., T. Kuzo, R. Meneghini, J. Awakw, and K. Okamoto,
2000: Rain profiling algorithm for the TRMM Precipita-
tion Radar. J. Appl. Meteor., 39, 2038–2052, doi:10.1175/
1520-0450(2001)040,2038:RPAFTT.2.0.CO;2.
Journel, A. G., and C. J. Huijbregts, 1978: Mining Geostatistics.
Academic, 600 pp.
Joyce, R. J., J. E. Janowiak, P. A. Arkin, and P. Xie, 2004:
CMORPH: A method that produces global precipitation es-
timates from passive microwave and infrared data at high
spatial and temporal resolution. J. Hydrometeor., 5, 487–503,
doi:10.1175/1525-7541(2004)005,0487:CAMTPG.2.0.CO;2.
Kim, D., B. Nelson, and D.-J. Seo, 2009: Characteristics of re-
processed Hydrometeorological Automated Data System
(HADS) hourly precipitation data. Wea. Forecasting, 24,
1287–1296, doi:10.1175/2009WAF2222227.1.
Klazura, G. E., and D. A. Imy, 1993: A description of the initial set
of analysis products available from the NEXRAD WSR-88D
system. Bull. Amer. Meteor. Soc., 74, 1293–1311, doi:10.1175/
1520-0477(1993)074,1293:ADOTIS.2.0.CO;2.
Koren, V., S. Reed, M. Smith, Z. Zhang, and D.-J. Seo, 2004: Hy-
drology Laboratory Research Modelling System (HL-RMS) of
the US National Weather Service. J. Hydrol., 291, 297–318,
doi:10.1016/j.jhydrol.2003.12.039.
Kubota, T., and Coauthors, 2007: Global precipitation map using
satellite-bornemicrowave radiometers by the GMSaP project:
Production and validation. IEEETrans. Geosci. Remote Sens.,
45, 2259–2275, doi:10.1109/TGRS.2007.895337.
Kuligowski, R., 2002: A self-calibrating real-time GOES rainfall algo-
rithm for short-term rainfall estimates. J. Hydrometeor., 3, 112–
130, doi:10.1175/1525-7541(2002)003,0112:ASCRTG.2.0.CO;2.
——, 2010: The Self-Calibrating Multivariate Precipitation Retrieval
(SCaMPR) for high-resolution, low-latency satellite-based
rainfall estimates. Satellite Applications for Surface Hydrology,
F. Hossain and M. Gebremichael, Eds., Springer, 39–48.
——, Y. Li, and Y. Zhang, 2013: Impact of TRMM data on a low-
latency, high-resolution precipitation algorithm for flash flood
forecasting. J. Appl. Meteor. Climatol., 52, 1379–1393,
doi:10.1175/JAMC-D-12-0107.1.
Kummerow, C., and Coauthors, 2001: The evolution of the Godard
Profiling Algorithm (GPROF) for rainfall estimation from
passive microwave sensors. J. Appl. Meteor., 40, 1801–1820,
doi:10.1175/1520-0450(2001)040,1801:TEOTGP.2.0.CO;2.
Kuzmin, V., D.-J. Seo, and V. Koren, 2008: Fast and efficient op-
timization of hydrologic model parameters using a priori es-
timates and stepwise line search. J. Hydrol., 353, 109–128,
doi:10.1016/j.jhydrol.2008.02.001.
Lampariello,F., 2000:On theuseof theKolmogorov-Smirnov statistical
test for immunofluorescence histogram comparison. Cytometry,
39, 179–188, doi:10.1002/(SICI)1097-0320(20000301)39:3,179::
AID-CYTO2.3.0.CO;2-I.
National Weather Service, 2006: Guidance on adaptable parame-
ters Doppler meteorological radar WSR-88D. WSR-88D
1068 JOURNAL OF HYDROMETEOROLOGY VOLUME 15

Handbook, Vol. 4, Federal Aviation Administration Tech. Is-
suance 6345.1, Radar Operations Center, Norman, OK, 186 pp.
Pan, M., H. Li, and E. Wood, 2010: Assessing the skill of satellite-
based precipitation estimates in hydrologic applications. Wa-
ter Resour. Res., 46, W09535, doi:10.1029/2009WR008290.
Press,W. H., S. A. Teukolsky,W. T. Vetterling, and B. P. Flannery,
1992: Numerical Recipes in Fortran. Cambridge University
Press, 963 pp.
Reed, S. M., D. R. Maidment, and J. Patoux, 1997: Spatial water
balance of Texas. CRWR Online Rep. 97-1, Center for Re-
search in Water Resources, University of Texas at Austin,
Austin, TX. [Available online at www.ce.utexas.edu/prof/
maidment/gishyd97/library/wbtexas/wbtexas.htm.]
——, V. Koren, M. Smith, Z. Zhang, F. Moreda, D.-J. Seo, and
DMIP Participants, 2004: Overall distributed model inter-
comparison project results. J. Hydrol., 298, 27–60, doi:10.1016/
j.jhydrol.2004.03.031.
——, J. Schaake, and Z. Zhang, 2007: A distributed hydrologic
model and threshold frequency-based method for flash flood
forecasting at ungauged locations. J. Hydrol., 337, 402–420,
doi:10.1016/j.jhydrol.2007.02.015.
Rozumalski, R.A., 2000:A quantitative assessment of theNESDIS
Auto-Estimator. Wea. Forecasting, 15, 397–415, doi:10.1175/1520-0434(2000)015,0397:AQAOTN.2.0.CO;2.
Schaake, J., Q. Duan, V. Koren, and A. Hall, 2001: Toward im-
proved parameter estimation of land surface hydrology
models through the Model Parameter Estimation Experiment
(MOPEX). IAHS Publ., 270, 91–97. [Available online at
http://iahs.info/uploads/dms/iahs_270_091.pdf.]
Seo, D.-J., 1998a: Real-time estimation of rainfall fields using rain
gauge data under fractional coverage conditions. J. Hydrol.,
208, 25–36, doi:10.1016/S0022-1694(98)00140-1.
——, 1998b: Real-time estimation of rainfall fields using radar
rainfall and rain gauge data. J. Hydrol., 208, 37–52,
doi:10.1016/S0022-1694(98)00141-3.
——, and J. P. Breidenbach, 2002: Real-time correction of spati-
ally nonuniform bias in radar rainfall data using rain gauge
measurements. J. Hydrometeor., 3, 93–111, doi:10.1175/
1525-7541(2002)003,0093:RTCOSN.2.0.CO;2.
——,——, and E. R. Johnson, 1999: Real-time estimation of mean
field bias in radar rainfall data. J. Hydrol., 223, 131–147,
doi:10.1016/S0022-1694(99)00106-7.
——, L. Cajina, R. Corby, and T. Howieson, 2009: Automatic state
updating for operational streamflow forecasting via varia-
tional data assimilation. J. Hydrol., 367, 255–275, doi:10.1016/j.jhydrol.2009.01.019.
——, J. Demargne, L. Wu, Y. Liu, J. D. Brown, S. Regonda, and
H. Lee, 2010: Hydrologic ensemble prediction for risk-based
water resources management and hazard mitigation. Joint
Federal Interagency Conf. on Sedimentation and Hydrologic
Modeling, Las Vegas, NV, NOAA, 26 pp. [Available online at
www.nws.noaa.gov/oh/hrl/hsmb/docs/hep/publications_
presentations/Seo_et_al_JFIC_June2010.pdf.]
——,A. Seed, andG.Delrieu, 2011: Radar andmultisensor rainfall
estimation for hydrologic applications. Rainfall: State of the
Science, Geophys. Monogr.,Vol. 191, Amer. Geophys. Union,
79–104, doi:10.1029/2010GM000952.
Smith, M. B., D.-J. Seo, V. Koren, S. Reed, Z. Zhang, Q. Duan,
F. Moreda, and S. Cong, 2004: The distributed model
intercomparison project (DMIP): Motivation and experiment
design. J. Hydrol., 298, 4–26, doi:10.1016/j.jhydrol.2004.03.040.
——, and Coauthors, 2012: Results of the DMIP 2 Oklahoma
experiments. J. Hydrol., 418–419, 17–48, doi:10.1016/j.jhydrol.2011.08.056.
Sorooshian, S., K.-L. Hsu, X. Gao, H. V. Gupta, B. Imam, and
D. Braithwaite, 2000: Evaluation of PERSIANN system
satellite-based estimates of tropical rainfall. Bull. Amer. Meteor.
Soc., 81, 2035–2046, doi:10.1175/1520-0477(2000)081,2035:
EOPSSE.2.3.CO;2.
Steiner,M., T. L. Bell, Y. Zhang, andE. F.Wood, 2003: Comparison
of twomethods for estimating the sampling-related uncertainty of
satellite rainfall averages based on a large radar dataset. J. Cli-
mate, 16, 3759–3778, doi:10.1175/1520-0442(2003)016,3759:
COTMFE.2.0.CO;2.
Stisen, S., and I. Sandholt, 2010: Evaluation of remote-sensing-
based rainfall products through predictive capability in hy-
drological runoff modelling. Hydrol. Processes, 24, 879–891,
doi:10.1002/hyp.7529.
Su, F., Y. Hong, and D. P. Lettenmaier, 2008: Evaluation of
TRMM Multisatellite Precipitation Analysis (TMPA) and its
utility in hydrologic prediction in the La Plata basin. J. Hy-
drometeor., 9, 622–640, doi:10.1175/2007JHM944.1.
Turk, F. J., and S. D. Miller, 2005: Toward improving estimates
of remotely-sensed precipitation with MODIS/AMSR-E
blended data techniques. IEEE Trans. Geosci. Remote Sens.,
43, 1059–1069, doi:10.1109/TGRS.2004.841627.
Vila, D., R. Ferraro, and R. Joyce, 2007: Evaluation and im-
provement of AMSU precipitation retrievals. J. Geophys.
Res., 112, D20119, doi:10.1029/2007JD008617.
Wang, X., H. Xie, H. Sharif, and J. Zeitler, 2008: Validating
NEXRAD MPE and Stage III precipitation products for
uniform rainfall on the Upper Guadalupe River Basin of
the Texas Hill Country. J. Hydrol., 348, 73–86, doi:10.1016/j.jhydrol.2007.09.057.
Wilks, D. S., 2006: Statistical Methods in the Atmospheric Sciences.
2nd ed. Academic Press, 627 pp.
Xie, P., M. Chen, S. Yang, A. Yatagai, T. Hayasaka, Y. Fukushima,
and C. Liu, 2007: A gauge-based analysis of daily precipitation
over East Asia. J. Hydrometeor., 8, 607–626, doi:10.1175/
JHM583.1.
Yilmaz, K. K., T. S. Hogue, K.-L. Hsu, S. Sorooshian, H. V. Gupta,
and T. Wagener, 2005: Intercomparison of rain gauge, radar,
and satellite-based precipitation estimates with emphasis on
hydrologic forecasting. J.Hydrometeor., 6, 497–517, doi:10.1175/JHM431.1.
Young, I. T., 1977: Proof without prejudice: Use of the
Kolmogorov-Smirnov test for the analysis of histograms from
flow systems and other sources. J. Histochem. Cytochem., 25,935–941, doi:10.1177/25.7.894009.
Zhang, Y., S. Reed, and D. Kitzmiller, 2011: Effects of retrospec-
tive gauge-based readjustment of multisensor precipitation
estimates on hydrologic simulations. J. Hydrometeor., 12, 429–
443, doi:10.1175/2010JHM1200.1.
——, D.-J. Seo, D. Kitzmiller, H. Lee, R. Kuligowski, D. Kim, and
C. R. Kondragunta, 2013: Comparative strengths of SCaMPR
satellite QPEs with and without TRMM ingest versus gridded
gauge-only analyses. J. Hydrometeor., 14, 153–170, doi:10.1175/
JHM-D-12-053.1.
JUNE 2014 LEE ET AL . 1069
Top Related
Copyright © 2022 FDOKUMEN

