
A Low-cost Vision Based Navigation System for Small Size Unmanned Aerial Vehicle Applications
Upload
independentCategory
view
2download
0
UNMANNED AERIAL VEHICLE
A PROJECT REPORT
Submitted by
KOPPERUNDEVI.P
MONIKA.J
MOUNIKA.B.M
in partial fulfillment for the award of the degree
of
BACHELOR OF ENGINEERING IN
ELECTRONICS AND COMMUNICATION ENGINEERING
PRATHYUSHA INSTITUTE OF TECHNOLOGY AND MANAGEMENT
ARANVOYALKUPPAM
ANNA UNIVERSITY: CHENNAI 600 025
APRIL 2015
ABSTRACT
The purpose of this paper is to introduce a novel
robot in order to overcome some difficulties in providing
an Automated External Defibrillator (AED) device at the
nearest location of victim suffering from sudden cardiac
arrest in the shortest possible time before the advent of
the ambulance. We designed and developed a vehicle that
brings along an AED to help lay rescuers for saving
patients life in a sudden event of cardiac arrest .The
first aid to the victim can be carried out once an
incident alarm is transmitted to the UAV Station by
sensing mobile phone application. Such applications
transmit required information to the UAV center for
further execution. The vehicle is located in UAV stations
when several stations can be covered via single center
where human operators are located. Here we present the

conduction of the tele-control method to control the
operation of the robot. In this method, not only vehicle
follows instructions of human operator till the robot
reaches the location of victim and delivers the AED but
also provides instruction to the people in the location
for applying the AED hence the lay rescuers will dry the
victim’s chest and attach the AED pads by themselves while
instructed and monitored by the human experts in the main
center in real-time.
iii
TABLE OF CONTENTS
CHAPTER TITLE PAGE NO
ABSTRACT iii
LIST OF FIGURESviii
LIST OF ABBREVIATIONS x
1 INTRODUCTION 11.1 INTRODUCTION 11.2 LITERATURE REVIEW 21.3 OBJECTIVE 31.4 EXISTING SYSTEM 3
1.4.1 Disadvantages in Existing System 4
1.5 PROPOSED SYSTEM 41.5.1 Advantages 41.5.2 Scope of the Project 4
2 IMPLEMENTATION AND DESIGN 52.1 BLOCK DIAGRAM 52.2 WORKING PRINCIPLE 7
3 COMPONENT DESCRIPTION 83.1 QUAD COPTER INTRODUCTION 8
3.1.1 Quad Copter Theory 93.1.2 The Kinetic Principle ofQuad Copter 10
3.2 MICROCONTROLLER UNIT 113.2.1 Introduction 11

iv

3.2.2 Microcontroller Packaging 123.2.3 Microcontroller Pin diagram 123.2.4 Pin Function 133.2.5 Internal Architecture 153.2.6 Memory Organization 163.2.7 Schematic and Features 183.2.8 System Clock 193.2.9 Reset Circuit 20
3.3 GSM 213.3.1 Definition 213.3.2 The GSM Network 213.3.3 GSM Modem 223.3.4 Functions of GSM 233.3.5 Applications of GSM 243.3.6 Features of GSM Communication 253.3.7 MAX 232 27
3.4 GPS INTRODUCTION 293.4.1Working of GPS 303.4.2 Three Segments of GPS 313.4.3 How GPS Works 32
3.5 ZIGBEE 333.5.1 ZigBee Physical Layer 333.5.2 The ZigBee Advantages 333.5.3 The Mesh Network 343.5.4 ZigBee Applications 353.5.5 DIGI ZigBee Technology 35

v

3.6 PROPELLERS 353.6.1 Air Foil 353.6.2 Structure of Air foils 363.6.3 Principle and Working 373.6.4 Aero Dynamic Force on the Airfoil 383.6.5 Pitch of Propellers 393.6.6 Uses of Propellers 40
3.7 FRAMES AND ARMS 403.8 DC MOTORS 41
3.8.1 Fleming’s Left Hand Rule 423.8.2 Working of Brushless DC Motors 423.8.3 Left Hand Rule for Coil 433.8.4 Brushless vs. Brushed DC Motors 43
3.9 RADIO TRANSMITTER AND RECEIVER 453.9.1 Transmitter (TX) 453.9.2 Receiver 463.9.3 HKT6A Transmitter 473.9.4 Modes of Transmitter 483.9.5 HKT6A Receiver 59
3.10 BATTERY AND CHARGERS 503.11 ELECTRONIC SPEED CABLE 513.12 DEFIBRILLATOR 51
4 SOFTWARE TOOLS 534.1 KEIL MICRO VERSION 3 53
5 RESULTS AND CONCLUSION 545.1 EXPREMENTAL RESULTS 54
vi

5.2 CONCLUSION AND FUTURE WORK 55APPENDICES 56REFERENCES 57
vii


LIST OF FIGURES
FIG.NO EXPLANATION PAGE NO
2.1 BLOCK DIAGRAM OF MONITORING UNIT 52.2 BLOCK DIAGRAM OF HELIPORT UNIT 63.1 NET MOMENT AT F3=0 93.2 DIRECTION OF ROTATION OF MOTORS 103.3 THE UPWARD THRUST MOTORS 113.4 PIN DIAGRAM 133.5 SIMPLIFIED INTERNAL ARCHITECTURE 153.6 PROGRAM MEMORY ARRANGEMENT 163.7 DATA MEMORY ORGANIZATION 18
3.8BLOCK FOR SCHEMATIC INPUT AND OUTPUTS 18
3.9 CLOCK CIRCUIT OF AT89C51 193.10 POWER ON RESET CIRCUIT 203.11 MANUAL RESET CIRCUIT 203.12 GSM NETWORK ELEMENTS 213.13 APPLICATIONS OF GSM MODEM 233.14 PIN DESCRIPTION OF MAX 232 283.15 GPS PCB BOARD DIAGRAM. 303.16 THREE SEGMENTS OF GPS 323.17 ZIGBEE MODULE 343.18 STRUCTURE OF AIRFOIL 373.19 FORCES ACTING ON AN AIR FOIL 383.20 PITCH OF A PROPELLER 39

viii

3.21 DIAGRAM OF FRAME 40
3.22 WORKING OF BRUSHLESS MOTORS 42
3.23 BRUSHLESS MOTORS 453.24 HKT6ATRANSMITTER 483.25 HKT6A RECEIVER 493.26 DIAGRAM OF BATTERY 503.26 ESC 513.27 DEFIBRILLATORS 525.1 PROTOTYPE OF QUADCOPTER 545.2 GPS SCREEN SHOT 545.3 GSM SCREEN SHOT 55
ix

LIST OF ABBREVIATIONS
ADC - ANALOG TO DIGITAL COVERTERAED - AUTOMATED EXTERNAL DEFIBRILLATERALE - ADDRESS LATCH ENABLEALU - ARITHMATIC LOGIC UNITDAC - DIGITAL TO ANALOG CONVERTERDIP - DUAL INLINE PACKAGEEA - EXTERNAL ACCESSEDC - ELECTRONIC DATA CAPTUREESC - ELECTRONIC SPEED CABLEGND - GROUNDGPS - GLOBAL POSITIONING SYSTEMGSM - GLOBAL SYSTEM FOR MOBILE COMMUNICATIONGUUB - GLOBALLY UNIFORMLY ULTIMATELY BOUNDEDMCS - MARKET COMMUNICATION SYSTEMNASA - NATIONAL AERONAUTICS AND SPACE ADMINISTRATIONPC - PERSONAL COMPUTERPCMCIA - PERSONAL COMPUTER MEMORY CARD INTERNATIONAL
ASSOCIATIONPOS - POINT OF SALEPQFP - PLASTIC QUAD FLAT PACKAGEPSEN - PROGRAM STORE ENABLEQFP - QUAD FLAT PACKAGERAM - RANDOM ACCESS MEMORYROM - READ ONLY MEMORYRPM - ROTATION PER MINUTE
x


SCM - SUPPLY CHAIN MANAGEMENTSIM - SUBSCRIBER IDENTITY MODULESMS - SHORT MESSAGE SERVICETQFP - THIN QUAD FLAT PACKAGEUAV - UNMANNED AERIAL VEHICLE

CHAPTER 1
INTRODUCTION
1.1 INTRODUCTION
Emergency situation refers to any unforeseen event
that. This situation can be broken down into two basic
categories, natural and manmade calamities. Natural
calamity is the phenomena of nature caused by
environmental factors that can bring catastrophic
consequences. While the world population grows rapidly
within creasing their concentration in hazardous
environments without giving much consideration to the
local geo-climatic conditions have exacerbated the
devastation caused by natural calamities. Therefore,
different forms of natural calamities like drought,
tsunami, earthquake, extreme temperature, mass movement
tweet, typhoon, and volcano strike according to the
vulnerability of threat in the globe. On the other
hand, the catastrophe can also because the consequence
of technological or human hazards, including industrial
accident and transport accident, where it is commonly
known as manmade calamity.
The ambulance has to transport the patient to the
hospital as quickly and safely as possible. However, in
many cases like life-threatening emergencies the
patient needs immediate first aid and medical attention
prevent serious danger. Meanwhile, the fate of patients
cannot be influenced by waiting the ambulance but
rather could be change different some treatments could
be given within a few minutes of the patient’s
collapse. For instance, individuals suffering sudden
cardiac arrest could be save different the Automated
External Defibrillator device known as AED is applied
within a few minutes after the occurrence of cardiac
arrest. At the same time, someone who helps the patient
must be able to perform CPR (Cardio pulmonary
Resuscitation) and attach the AED to a person in
cardiac arrest. The AED is small electronic portable
defibrillator that is designed for minimally trained or
trained non-medical personnel.
1

1.2 LITERATURE REVIEW
Scott A. Greened et al have proposed the human robot
collaboration and real time Augmented Reality Approach
in Design
NASA’s vision for space exploration stresses the
cultivation of human-robotic systems. Similar systems
are also envisaged for a variety of hazardous
earthbound applications such as urban search and
rescue. Recent research has pointed out that to reduce
human workload, costs, fatigue driven error and risk,
intelligent robotic systems will need to be a
significant part of mission design. However, little
attention has been paid to joint human-robot teams.
Making human-robot collaboration natural and efficient
is crucial. In particular, grounding, situational
awareness, a common frame of reference and spatial
referencing are vital in effective communication and
collaboration.
Mohammad sad d et al have proposed A Survey on Remotely
Operated Quad rotor Aerial Vehicle Using the Camera
Perspective.
This survey paper presents a mission-centric

approach to controlling the optical axis of a video
camera mounted on a camera manipulator and fixed to a
quad rotor remotely operated vehicle. A four-DOF quad
rotor, UAV model will be combined with a two-DOF camera
kinematic model to create a single system to provide a
full six DOF actuation of the camera view. This survey
work proposed exploits that all signals are described
in camera frame. The closed-loop controller is designed
based on a L yak pinot-type analysis so that the
tracking result is shown to produce Globally Uniformly
Ultimately Bounded (GUUB). Computer simulation results
are provided to demonstrate the suggested controller.
2

Patrick Doherty et al have proposed a mini unmanned
aerial vehicle (UAV): system overview and image
acquisition
The paper is to provide a broad overview of the
Unmanned Aerial Vehicle Project. The UAV project is an
ambitious, long-term basic research project with the
goal of developing technologies and functionalities
necessary for the successful deployment of a fully
autonomous UAV operating over diverse geographical
terrain containing road and traffic networks. The
project is multi-disciplinary in nature, requiring many
different research competences, and covering a broad
spectrum of basic research issues, many of which relate
to current topics in artificial intelligence. A number
of topics considered are knowledge representation
issues, active vision systems and their integration
with deliberative/reactive architectures, helicopter
modeling and control, ground operator dialogue systems,
actual physical platforms, and a number of simulation.
1.3 OBJECTIVE
The proposed system implements the vehicle that
carry the automated external defibrillator (AED) to
help the lay rescuers those are suffering from cardiac

arrest as soon as possible.
1.4 EXISTING SYSTEM
In the existing system the Quad copter is used in
the roadways which takes a huge amount of time to reach
the destination if any traffic occurs. The most
significant problem up to date has been an ambitious
development schedule coupled with very limited funds
and this ambition is followed by complexity in
calculation and designing. Quad copter will be
unbalance and lost stability in case there are
disturbance direct on it such as wind.
3

1.4.1 DISADVANTAGE OF EXISTING SYSTEM
1.The vehicle cannot be operated over a longdistance.
2.It takes time reach the destination if any trafficoccurs.
3.It can be hacked by unknown person. 4.If any problem
1.5 PROPOSED SYSTEM
In the proposed system, the Quad copter is
implemented in the airways and it is time saving. It
can reach the destination as soon as possible in case
of emergency and it is safer for close interaction. In
this project, the Quad copter do not require mechanical
linkages to vary the rotor blade pitch angle as they
spin. This simplifies the design and maintenance of the
vehicle. The Important feature is its size that is
suitable for programming from a PC platform. Capability
to move into a surface as small as a desk, both in
autonomous as remotely. It is equipped with an in-built
wireless communication module.
1.5.1 ADVANTAGE OF PROPOSED SYSTEM
1.Utilized for long distance operation. 2.Less time is needed to reach the destination. 3.If any doubts arise regarding dispatching AED a

toll free number is given to clarify that.
1.5.2 SCOPE OF PROJECT
1.Quad copter only can operate in sunny day or drycondition.
2.Quad copter is operated by brushless motor
control by electronic speed controller
4

CHAPTER 2
IMPLEMENTATION AND DESIGN
2.1 BLOCK DAIGRAM
The basic block diagram of the vehicle Section is
given in figure 2.1 .In this we are using two sections
one is monitoring unit and another is heliport unit. In
monitoring unit power supply is given to ZigBee and PC.
MAX232 forms an interface between ZigBee and PC. The
command given by PC is transmitted through ZigBee and
received by heliport unit. The receiver unit has
AT89C51 is the processing unit of the system. It reads
the data, process it and the output signal is send to
the various units like monitor, ZigBee module etc.
HELIPOTUNIT
GSM AT89C51
PCZIGBEE
Fig 2.1 Block Diagram of Monitoring Unit.

The heliport unit is shown in figure 2.2 .It
generates the control signal for units like driver
circuit which is connected to the helicopter robot.
5

The shocking device (AED) is carried by heliport
unit. When ZigBee in receiving unit receives the data
it transmit it to microcontroller using MAX232
interface and the driver circuit helps to move a
vehicle .While moving the pictures are captured by
camera is received and displayed in monitor. As soon as
the vehicle reached the rescuers by receiving the call
through GSM through the GPS location was tracked.
The procedure for applying Automated External
defibrillator (AED) is given by tele control method. A
toll free number is used if any doubts arise during
dispatching of AED.
CAMERA
AT89C ZIGBEESPEAKER 51
GPS

Fig 2.2 Block Diagram of Heliport unit
6

2.2 WORKING PRINCIPLE
Sudden cardiac arrest is the leading cause of
death worldwide. It can happen anywhere at work, at
home or anywhere else. AEDs are designed to help
someone in cardiac arrest. However, it may take a long
time to get an AED at nearest scene of victims because
AEDs are not available everywhere. Therefore, we have
proposed the UAV as a platform to save someone’s life
during cardiac arrest this robot can be characterized
by different degree of autonomy and it will executed
if fervent asks. Once the call initiated by lay
rescuers the GPS module issued to provide satellite
location information needed to find the shortest path
of victims, such as longitude/latitude coordinates and
direction. When the UAV center receives the GPS
information regarding the victim, the main server
located in the server computes the shortest path and
transmit it to the robot.
The UAV will carry an AED and follow the path for
tracing the victim until the destination has been
found. In this stage UAV is in autonomous navigation
and obstacle avoidance mode. UAV reports the current
situation and displays the motion through streaming

the video using cameras mounted on the in front arm of
the body and the other one on the arm. Such operation
method would improve the task of navigation compare to
the manual mode. Additionally, it may help to reduce
the stress on the operators because they can easily
understand what the robot is going to do and how to
send data to the robot. Although it has no human
intervention for controlling the robot but the
operator assistances till needed to deliver some
additional information.
7

CHAPTER 3COMPONENTS DESCRIPTION
HARDWARE EQUIPMENTS1.Quad copter 2.GSM 3.GPS 4.ZigBee 5.Propellers 6.Frames and arms 7.Brushless motors 8.Battery and charges 9.Electronic speed cable 10. Radio transmitter and receiver
3.1 QUAD COPTER INTRODUCTION
A quad-rotor helicopter (i.e. QUADCOPTER) is an
aircraft whose lift is generated by four rotors.
Control of such a craft is accomplished by varying the
speeds of the four motors relative to each other. Quad-
rotor crafts naturally demand a sophisticated control
system in order to allow for balanced flight.
Uncontrolled flight of a quad-rotor would be virtually
impossible by one operator, as the dynamics of such a
system demand constant adjustment of four motors

simultaneously. The goal of our project is to design
and construct a Spy copter, quad-copter capable of
Indoor-outdoor flight and hover with an on-board
wireless camera used for remote surveillance and
control.
8

Through the use of an integrated control system,this vehicle would be capable of autonomous operation,
including take-off, hover, and landing capabilities,controlled remotely by an operator and let the view the
real-time footage captured by the camera.
3.1.1 QUAD-COPTER THEORYOur Quad-copter uses four propellers, each
controlled by its own motor and electronic speed
controller. Using accelerometers we are able to measure
the angle of the Quad-copter in terms of X, Y, and Z
and accordingly adjust the RPM of each motor in order
to self-stabilize its self. The Quad-copter platform
provides stability as a result of the counter rotating
motors which result in a net moment of zero at the
centre of the Quad-copter.
Fig 3.1 Net Moment at f3=0
Using this principle we are able to adjust the speed
(RPM as a function of the voltage provided to the

motor) of each individual motor in order to correctly
manipulate Quad-copter’s yaw, pitch, and roll. Pitch
and roll can be controlled by changing the speed of the
appropriate motors, while yaw control involves delicate
balancing of all four motor functions in order to
change the moment force applied to the quad.
9

As seen from the below figure 3.2, two of the motors
i.e. motor 1 and 3 are rotating in a clockwise
direction and the other two motors i.e. motor 2 and 4
are rotating in anti-clockwise direction so as to
ensure the perfect balance at the centre of the quad-
copter.
Fig3.2 Direction of Rotation of Motors
3.1.2 THE KINETIC PRINCIPLE OF QUAD-COPTERUnlike common helicopters that have variable pitch
angle, the quad copter obtains the expected speed by
its fix pitch rotors whose speed is variable. The basic
kinetic diagram is shown below. The vertical movement
of quad copter could be realized by adjustments of the
speeds of all four rotors at the same time.
The movement along the X direction depends on theinclination on Y whose angle could be adjust by slowing
down the speeds of rotors 1 and 2, speeding up rotors 3

and 4.
The inclination also generate the acceleration
along X direction. The movement along the Y direction
depends on the inclination on X analogously.
10

Yaw movement is achieved by imbalance of the
moments generated by the four rotors. The common
helicopter has a stroke oar which could balance the
moment generated by the main rotor. However, the quad
copter could balance the moments only by each other.
The imbalance of the moments, if calculated precisely,
could generate expected yaw movement.
.Fig 3.3 The Upward Thrust Produced By All Motors
3.2 MICROCONTROLLER UNITThe microcontroller unit is used to sense the crack
using the crack sensor and to send a message to control
section in case of detection of crack and controls the
motor drivers. The microcontroller used in this project
is 8051 microcontroller.
3.2.1 INTRODUCTION
Intel first produced a microcontroller in 1976 under
the name MCS-48 which was an 8 bit microcontroller. Later
in 1980 they released a further improved version (which
is also 8 bit) under the name MCS-51. The most popular
microcontroller
11

8051 belongs to the MCS-51 family of microcontrollers
by Intel. Following the success of 8051 many other
semiconductor manufacturers released microcontrollers
under their own brand name but using the MCS-51 core.
Global companies and giants in semiconductor industry
like Microchip, Ziploc, Atmel, Philips, and Siemens
released products under their brand name. The specialty
was that all these devices could be programmed using
the same MCS-51 instruction sets. They basically
differed in support device configurations like improved
memory presence of an ADC or DAC etc. Intel then
released its first 16 bit microcontroller in 1982 under
name MCS-96.
3.2.2 AT89C51 MICROCONTROLLER PACKAGING
There is no need of explaining what each package
means you already know it. Availability of various
packages change from device to device. The most
commonly used is Dual Inline Package (40 pins) – known
popularly as DIP. 8051 is also available in QFP (Quad
Flat Package), TQFP (Thin Quad Flat Package), PQFP
(Plastic Quad Flat Package) etc.
3.2.3 AT89C51 MICROCONTROLLER PIN DIAGRAM
The below Fig 3.4 shows the AT89C51 pin diagram
which consists of four ports. The basic architecture
remains same for the MCS-51 family. In general all
microcontrollers in MCS- 51 family are represented by
XX51 where XX can take values like 80, 89 etc.
The8051 system bus composes of an 8 bit data bus
and a 16 bit address busand bus control signals.
12

3.2.4 PIN FUNCTIONS
1.Pins 1-8: Port 1 Each are input or an output. 2.Pin 9: RS a logic one on this pin disables the
microcontroller and clears the contents of registers.
The positive voltage on this pin resets the
microcontroller.
Fig 3.4 Pin diagram

3. Applying logic zero to this pin the program startsexecuting from the beginning.
4.Pins10-17: Port 3 Similar to port 1 these pins serveas general input or output.
13

5.Pin 10: RXD Serial asynchronous communication input
port or Serial synchronous communication output port.
6.Pin 11: TXD Serial asynchronous communication output
port or Serial synchronous communication clock output
port.
7.Pin 12: INT0 Interrupt 0 input pin. 8.Pin 13: INT1 Interrupt 1 input pin. 9.Pin 14: T0 Counter 0 clock input pin 10. Pin 15: T1 Counter 1 clock input pin.11. Pin 16: WR Write to external memory RAM. 12. Pin 17: RD Read from external memory RAM. 13. Pin 18, 19: X2, X1 Internal oscillator input and
output. A quartz crystal which specifies operating
frequency is connected to these pins. Later versionsof microcontrollers operation frequency is from 0 Hz
to 50 Hz.
14. Pin 20: GND Ground pin.15. Pin 21-28: Port 2 If there is no need of usage of
external memory then these port pins are configuredas general inputs/outputs. If external memory is used
the higher address byte will appear on this port.
16. Pin 29: PSEN if external ROM is used for storage of
program then a logic zero appears on it every time
the microcontroller reads a byte from memory.

17. Pin 30: ALE the microcontroller puts the loweraddress byte (A0-A7) on P0 and activates the ALE
output. After receiving signal from the ALE pin theexternal register memorizes the state of P0 and uses
it as a memory chip address. Immediately after thatthe ALU pin came back to its previous logic state and
P0 is now used as a Data Bus.
18. Pin 31: EA On applying logic zero to this pin P2
and P3 are used for data and address transmission On
applying logic one the microcontroller will use both
memories at first internal then external.
14

19. Pin 32-39: Port 0 Similar to P2 if external memoryis not in use these pins can be used as general
inputs/outputs. Otherwise, P0 is kept as addressoutput when the ALE pin is high or data output when
the ALE pin is driven low.
20. Pin 40: VCC +5V power supply given from the rectified output voltage.
3.2.5 INTERNAL ARCHITECTURE
The below Fig 3.5 shows were the bus connects all
the support devices with the central processing unit.
8051 system bus composes of an 8 bit data bus and a 16
bit address bus and bus control signals. Devices like
program memory, ports, data memory, serial interface,
interrupt control, timers, and the central processing
unit are all interfaced together through the system
bus. RxD and TxD (serial port input and output) are
interfaced with port 3.

Fig 3.5 Simplified Internal Architecture
15

3.2.6 MEMORY ORGANIZATION
Two types of architecture exist and they are
Princeton architecture and Harvard architecture.
Princeton architecture treats address memory and data
memory as a single unit (does not distinguish between
two) whereas Harvard architecture treats program memory
and data memory as separate entities. Thus Harvard
architecture demands address, data and control bus for
accessing them separately whereas Princeton
architecture does not demand any such separate bus.
8051 micro controller is based on Harvard architecture
and 8085 microprocessor is based on Princeton
architecture.
Thus 8051 has two memories: Program memory and Data memory
PROGRAM MEMORY ORGANIZATIONThe below Fig3.6 shows internal program of 4K size
and if needed an external memory can be added (by
interfacing) of size 60K maximum. So in total 64K size
memory is available for 8051 micro controller.

Fig 3.6 Program Memory Arrangement
16

It has an internal program of 4K size and if needed
an external memory can be added (by interfacing) of
size 60K maximum. So in total 64K size memory is
available for 8051 micro controller. The External
Access (EA) pin should be connected Vcc so that
instructions are fetched from internal memory
initially. When the limit of internal memory (4K) is
crossed control will automatically move to external
memory to fetch remaining instructions. If the
programmer wants to fetch instruction from external
memory only (bypassing the internal memory) then
connect External Access (EA) pin to ground (GND).
Once these bits are programmed contents of internal
memory cannot be accessed using an external circuitry.
However locking the software is not possible if
external memory is also used to store the software
code. Only internal memory can be locked and protected.
Once locked these bits can be unlocked only by a
memory-erase operation which in turn will erase the
programs in internal memory too.
AT89C51 is capable of pipelining. Pipelining makes
a processor capable of fetching the next instruction

while executing previous instruction. It’s something
like multi-tasking doing more than one operation at a
time. 8051 is capable of fetching first byte of the
next instruction while executing the previous
instruction.
DATA MEMORY ORGANIZATION
The below Fig 3.7 shows MCS-51 family, AT89C51 has
128 bytes of internal data memory and it allows
interfacing external data memory of maximum size up to
64K. So the total size of data memory in 8051 can be up
to 64K (external) + 128 bytes (internal).
17
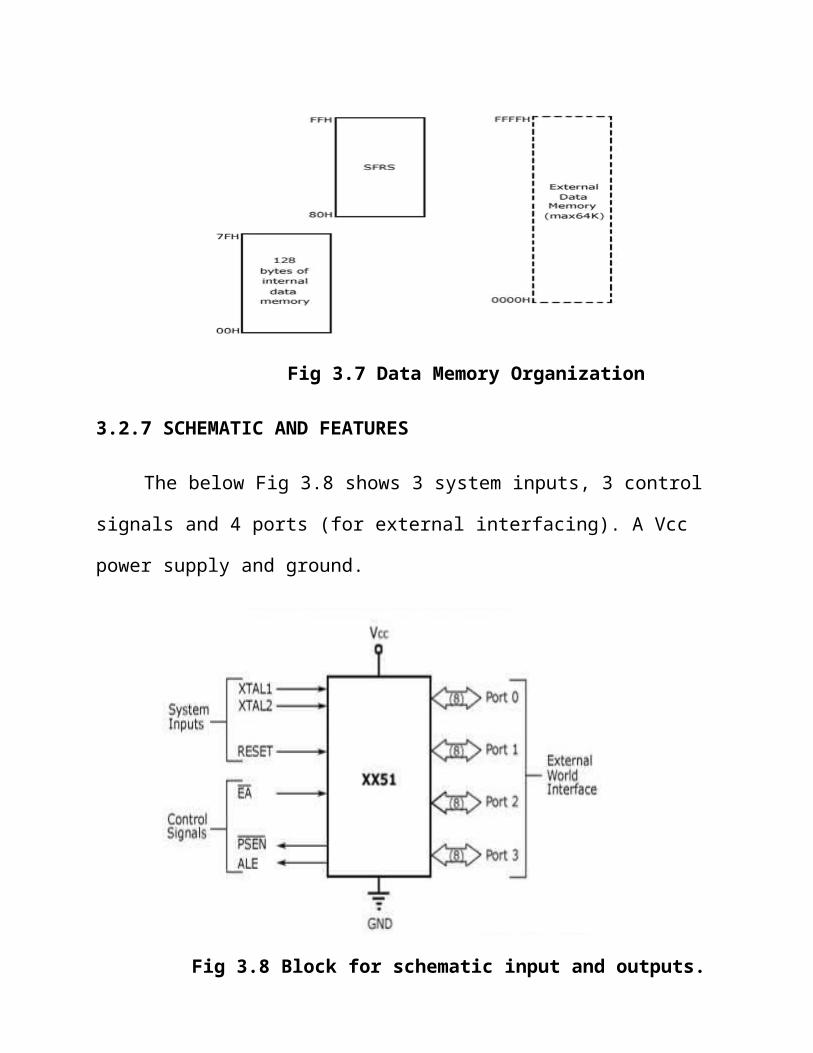
Fig 3.7 Data Memory Organization
3.2.7 SCHEMATIC AND FEATURES
The below Fig 3.8 shows 3 system inputs, 3 control
signals and 4 ports (for external interfacing). A Vcc
power supply and ground.
Fig 3.8 Block for schematic input and outputs.

18

XTAL 1 and XTAL 2 are for the system clock inputs
from crystal clock circuit. RESET input is required to
initialize microcontroller to default/desired values
and to make a new start.
There are 3 control signals EA, PSEN and ALE. These
signal is known as External Access (EA), Program Store
Enable (PSEN) and Address Latch Enable (ALE) are used
for external memory interfacing.
3.2.8 SYSTEM CLOCK
The connection shown in Fig 3.9 is the connections toXTAL 1 and XTAL 2.
Fig 3.9 Clock Circuit of AT89C51.
In some cases external clock sources are used and
you can see the various connections. Clock frequency

limits (maximum and minimum) may change from device to
device. Standard practice is to use 12MHz frequency. If
serial communications are involved then its best to use
11.0592 MHz frequency.
19

3.2.9 RESET CIRCUIT
AT89C51 can be reset in two ways Fig 3.10 is power-
on reset – which resets the 8051 when power is turned
ON and Fig 3.11 manual reset – in which a reset happens
only when a push button is pressed manually. Two
different reset circuits are shown above. A reset
doesn’t affect contents of internal RAM. For reset to
happen the reset input pin (pin 9) must be active high
for at least 2 machine cycles.
During a reset operation Program counter is cleared
and it starts from 00H, register bank #0 is selected as
default, Stack pointer is initialized to 07H

Fig 3.10 Power on Reset Circuit Fig 3.11 Manual Reset Circuit
20

3.3 GSM3.3.1 DEFINITION
Global system for mobile communication (GSM) is
a globally accepted standard for digital cellular
communication. GSM is the name of a standardization
group established in 1982 to create a common European
mobile telephone standard that would formulate
specifications for a pan-European mobile cellular radio
system operating at 900 MHz.
3.3.2 THE GSM NETWORK
GSM provides recommendations, not requirements.
The GSM specifications define the functions and interface
requirements in detail but do not address the hardware.
The reason for this is to limit the designers as little
as possible but still to make it possible for the
operators to buy equipment from different suppliers. The
GSM network is divided into three major systems: the
switching system (SS), the base station system (BSS), and
the operation and support system (OSS). The basic GSM
network elements are shown in below figure.

Fig 3.12 GSM Network Elements
21

3.3.3 GSM MODEM
A GSM modem is a wireless modem that works with a GSM
wireless network. A wireless modem behaves like a dial-up
modem. The main difference between them is that a dial-up
modem sends and receives data through a fixed telephone
line while a wireless modem sends and receives data
through radio waves.
A GSM modem can be an external device or a PC
Card / PCMCIA Card. Typically, an external GSM modem is
connected to a computer through a serial cable or a USB
cable. A GSM modem in the form of a PC Card / PCMCIA
Card is designed for use with a laptop computer. It
should be inserted into one of the PC Card / PCMCIA
Card slots of a laptop computer. Like a GSM mobile
phone, a GSM modem requires a SIM card from a wireless
carrier in order to operate.
As mentioned in earlier sections of this SMS
tutorial, computers use AT commands to control modems.
Both GSM modems and dial-up modems support a common set
of standard AT commands. IT can use a GSM modem just
like a dial-up modem. In addition to the standard AT
commands, GSM modems support an extended set of AT
commands. These extended AT commands are defined in the

GSM standards. With the extended AT commands,
• Reading, writing and deleting SMS messages. • Sending SMS messages. • Monitoring the signal strength. • Monitoring the charging status and charge level of
the battery. • Reading, writing and searching phone book entries.
The number of SMS messages that can be processed bya GSM modem per
minute is very low -- only about six to ten SMS messages per minute.
22

Fig 3.13 Applications of GSM Modem
3.3.4. FUNCTIONS OF GSM
The GSM/GPRS Modem comes with a serial interface
through which the modem can be controlled using AT
command interface. An antenna and a power adapter are
provided.
The basic segregation of working of the modem is as
under
1.Voice calls 2.SMS 3.GSM Data calls

23

VOICE CALLS
` Voice calls are not an application area to be
targeted. In future if interfaces like a microphone
and speaker are provided for some applications then
this can be considered.
SMS
1.SMS is an area where the modem can be used
to provide features like: Pre-stored SMS
transmission.
2.These SMS can be transmitted on certain
trigger events in an automation system
3.SMS can also be used in areas where smalltext information has to Be sent.
The transmitter can be an automation system or
machines like vending machines, collection machines or
applications like positioning systems where the
navigator keeps on sending SMS at particular time
intervals. SMS can be a solution where GSM data call or
GPRS services are not available.
3.3.5 APPLICATIONS OF GSM
ACCESS CONTROL DEVICES

Now access control devices can communicate with
servers and security staff through SMS messaging.
Complete log of transaction is available at the head-
office Server instantly without any wiring involved and
device can instantly alert security personnel on their
mobile phone in case of any problem.
24
TRANSACTION TERMINALS
EDC machines, POS terminals can use SMS messaging
to confirm transactions from central servers. The main
benefit is that central server can be anywhere in the
world. Today you need local servers in every city with
multiple telephone lines. You save huge infrastructure
costs as well as per transaction cost.
SUPPLY CHAIN MANAGEMENT
Today SCM require huge IT infrastructure with
leased lines, networking devices, data center,
workstations and still you have large downtimes and
high costs. You can do all this at a fraction of the
cost with GSM M2M technology. A central server in your
head office with GSM capability is the answer; you can
receive instant transaction data from all your branch
officers, warehouses and business administration.
3.3.6 FEATURES OF GSM COMMUNICATION
Features of GSM will be more cost-effective
than other communication systems.
SHORT DATA SIZE
You data size per transaction should be small like
1-3 lines. e.g. banking transaction data, sales/purchase

data, consignment tracking data, updates. These small but
important transaction data can be sent through SMS
messaging which cost even less than a local telephone
call or sometimes free of cost worldwide. Hence with
negligible cost you are able to send critical information
to your head office located anywhere in the world from
multiple points. It can also transfer faxes, large data
through GSM but this will be as or more costly compared
to landline networks.
25

MULTIPLE REMOTE DATA COLLECTION POINTS
If you have multiple data collections points
situated all over your city, state, country or
worldwide you will benefit the most. The data can be
sent from multiple points like your branch offices,
business associates, warehouses, and agents with
devices like GSM modems connected to PCs, GSM
electronic terminals and Mobile phones. Many a times
some places like warehouses may be situated at remote
location may not have landline or internet but you will
have GSM network still available easily.
HIGH UPTIME
If your business require high uptime and
availability GSM is best suitable for you as GSM mobile
networks have high uptime compared to landline,
internet and other communication mediums. Also in
situations where you expect that someone may sabotage
your communication systems by cutting wires or taping
landlines, you can depend on GPS wireless communication
system:
LARGE TRANSACTION VOLUMES
GSM SMS messaging can handle large number of

transaction in a very short time. You can receive large
number SMS messages on your server like e-mails without
internet connectivity. E-mails normally get delayed a
lot but SMS messages are almost instantaneous for
instant transactions.
Consider situation like shop owners doing credit
card transaction with GSM technology instead of
conventional landlines. Time you find local transaction
servers busy as these servers use multiple telephone
lines to take care of multiple transactions, whereas
one GSM connection is enough to handle hundreds of
transaction.
26

MOBILITY AND QUICK INSTALLATION
GSM technology allows mobility, GSM terminals, modems
can be just picked and installed at other location unlike
telephone lines. Also you can be mobile with GSM
terminals and can also communicate with server using your
mobile phone. You can just purchase the GSM hardware like
modems, terminals and mobile handsets, insert SIM cards,
configure software and ready for GSM communication.
3.3.7 MAX 232
INTRODUCTION
MAX-232 is primary used for people building
electronics with an RS-232 interface. Serial RS-232
communication works with voltages (-15V ... -3V for
high) and +3V ... +15V for low) which are not
compatible with normal computer logic voltages. To
receive serial data from an RS-232 interface the
voltage has to be reduced, and the low and high voltage
level inverted. In the other direction (sending data
from some logic over RS-232) the low logic voltage has
to be "bumped up", and a negative voltage has to be
generated, too.
A standard serial interfacing for PC, RS232C,

requires negative logic, i.e., logic '1' is -3V to -12V
and logic '0' is +3V to +12V. To convert TTL logic,
say, TxD and RxD pins of the uC chips thus need a
converter chip. A MAX232 chip has long been using in
many uC boards.
It provides 2-channel RS232C port and requires
external 10uF capacitors. Carefully check the polarity
of capacitor when soldering the board.
27

Fig 3.14 Pin Description of Max 232
A standard serial interfacing for PC, RS232C,
requires negative logic, i.e., logic '1' is -3V to -12V
and logic '0' is +3V to +12V. To convert TTL logic,
say, TxD and RxD pins of the uC chips thus need a
converter chip. A MAX232 chip has long been using in
many uC boards. It provides 2-channel RS232C port and
requires external 10uF capacitors. Carefully check the
polarity of capacitor when soldering the board.
RS232 is an asynchronous serial communications
protocol, widely used on computers. Asynchronous means
it doesn't have any separate synchronizing clock
signal, so it has to synchronize itself to the incoming
data - it does this by the use of 'START' and 'STOP'
pulses.

The signal itself is slightly unusual for
computers, as rather than the normal 0V to 5V range, it
uses +12V to -12V - this is done to improve
reliability, and greatly increases the available range
it can work over - it isn't necessary to provide this
exact voltage swing, and you can actually use the PIC's
0V to 5V voltage swing with a couple of resistors to
make a simple RS232 interface which will usually work
well, but isn't guaranteed to work with all serial
ports.28

AN RS232 TO TTL LEVEL CONVERTER
The RS232/DB9 is designed to convert TTL level
signals into RS232 level signals. This cable allows you
to connect a TTL level device, such as the serial port
on a Micro-controller, to the serial port of a personal
computer. The conversion circuit is housed inside the
DB9 connector shell. Power is supplied from the micro-
controller board.
The board is based on the Maxim MAX3221CAE
interface chip. This chip draws a mere 1mA of current
when there are no RS-232 signals connected to the part.
With the exception of the DB9 connector and the wire,
all parts on this board are surface mounted, and
require care during assembly. The mounting of surface
mount parts is not difficult, but does require a steady
hand. A magnifying glass or other visual aid may be
helpful. You also need some electronic paste flux.
3.4 GPS INTRODUCTION
The Global Positioning System (GPS) is a satellite-
based navigation system made up of a network of 24
satellites placed into orbit by the U.S. Department of
Defense. GPS was originally intended for military
applications, but in the 1980s, the US Government made

the system available for civilian use .
GPS works in any weather conditions, anywhere in
the world, 24 hours a day. There are no subscription
fees or setup charges to use GPS.
The Global Positioning System was conceived in 1960
under the auspices of the U.S. Air Force, but in 1974
the other branches of the U.S. military joined the
effort. The first satellites were launched into space
in 1978. The System was declared fully operational in
April 1995. The Global Positioning System consists of
24 satellites, that circle the globe once every 12
hours, to provide worldwide position, time and velocity
information.
29

Fig 3.15 GPS PCB Board Diagram.
GPS makes it possible to precisely identify
locations on the earth by measuring distance from the
satellites. GPS allows you to record or create
locations from places on the earth and help you
navigate to and from those places. Originally the
System was designed only for military applications and
it wasn’t until the 1980’s that it was made available
for civilian use also.
3.4.1 WORKING OF GPS
GPS satellites circle the earth twice a day in a very
precise orbit and transmit signal information to earth.
There are 24 satellites that make up the GPS space
segment that are orbiting the earth at approximately

19,000 kilometers above us. They are constantly moving,
making two complete orbits in less than 24 hours. These
satellites are travelling at speeds of roughly 11,000
kilometers per hour. GPS receivers take this information
and use triangulation to calculate the user's exact
location. Essentially, the GPS receiver compares the time
a signal was transmitted by a satellite with the time it
was received. The time difference tells the GPS receiver.
30
How far away the satellite is. Now, with distance
measurements from a few more satellites, the receiver
can determine the user's position and display it on the
unit's electronic map. A GPS receiver must be locked on
to the signal of at least three satellites to calculate
a 2D position (latitude and longitude) and track
movement. With four or more satellites in view, the
receiver can determine the user's 3D position
(latitude, longitude and altitude).
Once the user's position has been determined, the
GPS unit can calculate other information, such as
speed, bearing, track, trip distance, distance to
destination, sunrise and sunset time and more.
3.4.2 THREE SEGMENTS OF GPS
THE SPACE SEGMENT
The space segment consists of 24 satellites
circling the earth at 12,000 miles in altitude. This
high altitude allows the signals to cover a greater
area. The satellites are arranged in their orbits so a
GPS receiver on earth can always receive a signal from
at least four satellites at any given time.
Each satellite transmits low radio signals with a
unique code on different frequencies, allowing the GPS

receiver to identify the signals. The main purpose of
these coded signals is to allow for calculating travel
time from the satellite to the GPS receiver. The travel
time multiplied by the speed of light equals the
distance from the satellite to the GPS receiver. Since
these are low power signals and won’t travel through
solid objects, it is important to have a clear view of
the sky.
31

Fig 3.16 Three Segments of GPS.
THE CONTROL SEGMENT
The control segment tracks the satellites and then
provides them with corrected orbital and time
information. The control segment consists of four
unmanned control stations and one master control
station. The four unmanned stations receive data from
the satellites and then send that information to the
master control station where it is corrected and sent
back to the GPS satellites.
THE USER SEGMENT
The user segment consists of the users and their
GPS receivers. The number of simultaneous users is
limitless.
3.4.3 HOW GPS WORKS
When a GPS receiver is turned on, it first downloads
orbit information of all the satellites. This process,

the first time, can take as long as 12.5 minutes, but
once this information is downloaded; it is stored in the
receiver’s memory for future use.
Even though the GPS receiver knows the precise
location of the satellites in space, it still needs to
know the distance from each satellite it is receiving a
signal from. That distance is calculated, by the
receiver, by multiplying the velocity of the
transmitted signal by the time it takes the signal to
reach the receiver. The receiver
32

already knows the velocity, which is the speed of a
radio wave or 186,000 miles per second (the speed of
light).
To determine the time part of the formula, the
receiver matches the satellites transmitted code to its
own code, and by comparing them determines how much it
needs to delay its code to match the satellites code.
This delayed time is multiplied by the speed of light
to get the distance.
The GPS receiver’s clock is less accurate than the
atomic clock in the satellite; therefore, each distance
measurement must be corrected to account for the GPS
receiver’s internal clock error.
3.5 ZIGBEE
3.5.1 ZIGBEE PHYSICAL LAYER
ZigBee is a wireless technology developed as an
open global standard to address the unique needs of
low-cost, low-power wireless M2M networks. The ZigBee
standard operates on the IEEE 802.15.4 physical radio
specification and operates in unlicensed bands
including 2.4 GHz, 900 MHz and 868 MHz.
The 802.15.4 specification upon which the ZigBee

stack operates gained ratification by the Institute of
Electrical and Electronics Engineers (IEEE) in 2003.
The specification is a packet-based radio protocol
intended for low-cost, battery-operated devices. The
protocol allows devices to communicate in a variety of
network topologies and can have battery life lasting
several years.
3.5.2 THE ZIGBEE ADVANTAGE
The ZigBee protocol is designed to communicate data
through hostile RF environments that are common in
commercial and industrial applications.
33

ZigBee protocol features include:
1.Support for multiple network topologies such as
point-to-point, point-to-multipoint and mesh
networks.
2.Low duty cycle – provides long battery life. 3.Low latency. 4.Up to 65,000 nodes per network. 5.128-bit AES encryption for secure data
connections. 6.Collision avoidance, retries and
acknowledgements.
Fig 3.17 ZigBee module
3.5.3 MESH NETWORKS
A key component of the ZigBee protocol is the
ability to support mesh networking. In a mesh network,
nodes are interconnected with other nodes so that
multiple pathways connect each node. Connections

between nodes are dynamically updated and optimized
through sophisticated, built-in mesh routing table.
Mesh networks are decentralized in nature; each
node is capable of self-discovery on the network. Also,
as nodes leave the network, the mesh topology allows
the nodes to reconfigure routing paths based on the new
network structure.
34

The characteristics of mesh topology and ad-hoc routing
provide greater stability in changing conditions or
failure at single nodes.
3.5.4 ZIGBEE APPLICATIONS
ZigBee enables broad-based deployment of wireless
networks with low-cost, low-power solutions. It provides
the ability to run for years on inexpensive batteries for
a host of monitoring and control applications. Smart
energy/smart grid, AMR (Automatic Meter Reading),
lighting controls, building automation systems, tank
monitoring, HVAC control, medical devices and fleet
applications are just some of the many spaces where
ZigBee technology is making significant advancements.
3.5.5 DIGI ZIGBEE TECHNOLOGY
Digi is a member of the ZigBee Alliance and has
developed a wide range of networking solutions based on
the ZigBee protocol. XBee and XBee-PRO modules and
other XBee-enabled devices provide an easy-to-implement
solution that provides functionality to connect to a
wide variety of devices.
3.6 PROPELLERSA propeller is a type of fan that transmits power

by converting rotational motion into thrust. A pressure
difference is produced between the forward and rear
surfaces of the airfoil-shaped blade, and air or water
is accelerated behind the blade. Propeller dynamics can
be modelled by both Bernoulli’s principle.
3.6.1 AIRFOILAn airfoil or aero foil is the shape of a wing or
blade (of a propeller, rotor or turbine) or sail as
seen in cross-section. An airfoil-shaped body moved
through a fluid produces an aerodynamic force. The
component of this force perpendicular to
35

the direction of motion is called lift. The componentparallel to the direction of motion is called drag.
Subsonic flight airfoils have a characteristic shapewith a rounded leading edge, followed by a sharp
trailing edge, often with asymmetric camber. Foils ofsimilar function designed with water as the working
fluid are called hydrofoils.
The lift on an airfoil is primarily the result of
its angle of attack and shape (in particular its
camber). When either is positive, the resulting flow
field about the airfoil has a higher average velocity
on the upper surface than on the lower surface.
This velocity difference is necessarily accompanied
by a pressure difference, via Bernoulli’s principle for
incompressible in viscid flow, which in turn produces
the lift force. The lift force can also be related
directly to the average top/bottom velocity difference,
without invoking the pressure, by using the concept of
circulation and the Kutta-Joukowski theorem.
3.6.2 STRUCTURE OF AN AIRFOIL 1.Angle of attack is the angle between the
lifting body’s reference line(chord) and the
oncoming flow.
2.The chord of an airfoil is the imaginary

straight line drawn through theairfoil from itsleading edge to its trailing edge.
3.Camber is the asymmetry between the top and
the bottom surfaces ofan airfoil.
4.The trailing edge is the back of the airfoil—
the place at which theairflow over the upper
surface of the airfoil joins the airflow over
the lower surface of the airfoil.
36

Fig 3.18 Structure of Airfoil
5 The leading edge is the “front” of the airfoil—
the portion that meetsthe air first.
3.6.3 PRINCIPLE AND WORKING
The principle and working of a propeller is based
on Bernoulli’s Principle & Newton’s Third Law.
Bernoulli’s principle states that for an in viscid
flow, an increase in the speed of the fluid occurs
simultaneously with a decrease in pressure or a
decrease in the fluid’s potential energy. Newton’s
third law states that every action has an equal and
opposite reaction.
An aerofoil is shaped so that air flows faster over
the top than under the bottom. There is, therefore, a
greater pressure below the aerofoil than above it.This

difference in pressure produces the lift. Lift
coefficient is a dimensionless coefficient that relates
the lift generated by an aerodynamic body such as a
wing or complete aircraft, the dynamic pressure of the
fluid flow around the body, and a reference area
associated with the body.
37

3.6.4 AERODYNAMIC FORCES ACTING ON THE AIRFOILLift and drag are considered to be the two
aerodynamic forces that are acting upon the airfoil as
shown in the below figure.
Lift is defined to be the component of this force
that is perpendicular to the oncoming flow direction.
Drag is defined to be the component of the surface
force parallel to the flow direction. In fluid
dynamics, drag (sometimes called air resistance or
fluid resistance) refers to forces that oppose the
relative motion of an object through a fluid (a liquid
or gas).

Fig 3.19 Forces acting on an Air foil
38

3.6.5 PITCH OF A PROPELLER
Pitch of a propeller is normally described as the
distance travelled per rotation, assuming there is no
slip ..Low pitch yields good low speed acceleration (and
climb rate in an aircraft) while high pitch optimizes
high speed performance and economy.
Fig 3.20 Pitch of a Propeller
Blade pitch or simply pitch refers to turning the
angle of attack of the blades of a propeller or
helicopter rotor into or out of the wind to control the
production or absorption of power. Wind turbines use
this to adjust the rotation speed and the generated
power. A propeller of a ship uses this effect to
control the ship’s speed without changing the rotation
of the shaft and to increase the efficiency of
streaming fluids. In aircraft, blade pitch is usually
described as “coarse” for a high angle of attack, and

“fine” for a low angle of attack. Blade pitch is
normally described in units of distance/rotation
assuming no slip. Blade pitch acts much like the
gearing of the final drive of a car.
Low pitch yields good low speed acceleration (and
climb rate in an aircraft) while high pitch optimizes
high speed performance and economy. Because the
velocity of a propeller blade varies from the hub to
the tip, they must be of twisted form in order for the
pitch to remain constant along the length of the blade.
39

This is typical of all but the crudest propellers.
It is quite common in aircraft for the propeller to be
designed to vary pitch in flight, optimizing both
cruise and takeoff performance.
3.6.6 USES OF PROPELLERS
We have used 3 Blade, 9×5 pitch rotating and
counter rotating propellers. Benefits of using a 3
blade propeller over 2 blades is that we get more blade
area because of which the blade can transfer more power
onto the air, thus providing more lift. We are using
two different kinds of blades one rotating in clockwise
directions and other rotating in anti-clockwise
direction, thus producing force in opposite directions.
3.7 FRAMES AND ARMS
Arms also play a vital role in the fight against
vibrations, which can cause a number of different
issues. Flight controllers, with their sensitive
barometers and gyroscopes, do not generally react well
to incessant shaking. Jostle them too much through a
poor setup and you could see erratic behaviour,
sometimes bad enough to cause crashes. Vibrations are
also the dread of anyone hoping to use a camera on a

multi-rotor. The shaking ruins footage through an
artefact referred to as "jell", wavy, headache-inducing
distortion formed as a result of progressive scanning.
Fig 3.21 Diagram of Frame40

If the arms are too much flex, they can reverberate
and create harmonics that are transferred across the
multi-rotor. On the other hand, arms that are too stiff
directly pass on vibrations without any dampening,
resulting in the same problems. There is a fine balance
to be found.
The scale of a multi-rotor is often denoted by the
horizontal width of the frame assembly, including its
arms. The standard measurement is taken in millimetres
from motor to motor through the centre of the frame. If
a model includes numbers in the title, they probably
refer to this measurement. A DJI F450 is around 450 mm
across, for example. The F330 is 330 mm, and so on.
3.8 DC MOTORSA DC motor is an electric motor that runs on direct
current (DC) electricity. In any electric motor,
operation is based on simple electromagnetism. A current-
carrying conductor generates a magnetic field; when this
is then placed in an external magnetic field, it will
experience a force proportional to the current in the
conductor, and to the strength of the external magnetic
field. As you are well aware of from playing with magnets

as a kid, opposite (North and South) polarities attract,
while like polarities (North and North, South and South)
repel. The internal configuration of a DC motor is
designed to harness the magnetic interaction between a
current-carrying conductor and an external magnetic field
to generate rotational motion.
A dc motor can be broadly classified into two distinguished types of motors namely
1. Brushed dc motor 2. Brushless dc motor
41

3.8.1 FLEMING’S LEFT HAND RULE
Fleming’s left hand rule (for motors), is a visual
mnemonics that is used for working out which way an
electric motor will turn. The term was coined by John
Ambrose Fleming in the late 19th century. When an
electric current flows in a wire, and an external
magnetic field is applied across that flow, the wire
experiences a force perpendicular both to that field,
and to the direction of the current flow. A left hand
can be held, as shown in the illustration, so as to
represent three mutually orthogonal axes on the thumb,
first finger and middle finger. It is then just a
question of remembering which finger represents which
quantity (electric current, magnetic field and
mechanical force), and whether the right hand should be
used instead of the left.
3.8.2 Working of BRUSHLESS DC MOTOR
Brushless DC motors (BLDC motors, BL motors) also
known as electronically commutated motors (ECMs, EC
motors) are synchronous electric motors powered by
direct-current (DC) electricity and electronic
commutation systems, rather mechanical commutators and
brushes.

Fig 3.22 Working of Brushless Motors
42

The current-to-torque and frequency-to-speed
relationships of BLDC motors are linear. BLDC motors
may be described as stepper motors, with fixed
permanent magnets and possibly more poles on the rotor
than the stator, or reluctance motors. The latter may
be without permanent magnets, just poles that are
induced on the rotor then pulled into alignment by
timed stator windings. However, the term stepper motor
tends to be used for motors that are designed
specifically to be operated in a mode where they are
frequently stopped with the rotor in a defined angular
position; this page describes more general BLDC motor
principles, though there is overlap. Now the movement
of the magnet in the center depends on the direction of
flow of current in the coil as shown in the above
figure. The continuous movement of the magnet is
ensured by Left hand rule for the coils.
3.8.3 LEFT HAND RULE FOR THE COILS
The left hand rule states that grasp the coil in
your left hand, with your finger wrapped around in the
direction of the current. Your thumb will point towards
the north pole of the coil.
3.8.4 BRUSHLESS VS BRUSHED DC MOTOR

Limitations of brushed DC motors overcome by BLDC
motors include lower efficiency and susceptibility of the
commutator assembly to mechanical wear and consequent
need for servicing, at the cost of potentially less
rugged and more complex and expensive control
electronics. A BLDC motor has permanent magnets which
rotate and a fixed armature, eliminating the problems of
connecting current to the moving armature. An electronic
controller replaces the brush/commutator assembly of the
brushed DC motor, which continually switches the phase to
the windings to keep the motor turning. The controller
performs similar timed power distribution by using a
solid-state circuit rather than the brush/commutator
system.
43

BLDC motors offer several advantages over brushed DC
motors, including more torque per weight and efficiency,
reliability, reduced noise, longer lifetime (no brush and
commutator erosion), elimination of ionizing sparks from
the commutator, more power, and overall reduction of
electromagnetic interference (EMI).
With no windings on the rotor, they are not
subjected to centrifugal forces, and because the
windings are supported by the housing, they can be
cooled by conduction, requiring no airflow inside the
motor for cooling. This in turn means that the motor’s
internals can be entirely enclosed and protected from
dirt or other foreign matter.
The maximum power that can be applied to a BLDC
motor is exceptionally high, limited almost exclusively
by heat, which can weaken the magnets. A BLDC motor’s
main disadvantage is higher cost, which arises from two
issues. First, BLDC motors require complex electronic
speed controllers to run. Brushed DC motors can be
regulated by a comparatively simple controller, such as
a rheostat (variable resistor).
However, this reduces efficiency because power is
wasted in the rheostat. Second, some practical uses

have not been well developed in the commercial sector.
For example, in the Radio Control (RC) hobby, even
commercial brushless motors are often hand-wound while
brushed motors use armature coils which can be
inexpensively machine-wound.
44

Fig 3.23 Brushless Motors
BLDC motors are often more efficient at converting
electricity into mechanical power than brushed DC
motors. This improvement is largely due to the absence
of electrical and friction losses due to brushes. The
enhanced efficiency is greatest in the no-load and low-
load region of the motor’s performance curve.
The number of permanent magnets in the rotor does
not match the number of stator poles, however. The
difference between the number of magnet poles and the
number of stator poles provides an effect that can be
understood as similar to planetary gear ingle in
efficiency.
3.9 RADIO TRANSMITTER AND RECEIVER
3.9.1 TRANSMITTER (TX)

In electronics and telecommunications a radio
transmitter is an electronic device which, with the aid
of an antenna, produces radio waves. The transmitter
itself generates a radio frequency alternating current,
which is applied to the antenna. When excited by this
alternating current, the antenna radiates radio waves.
The term transmitter is usually limited to equipment that
generates radio waves
45

for communication purposes; or radiolocation, such as
radar and navigational transmitters. A transmitter can
be a separate piece of electronic equipment, or an
electrical circuit within another electronic device. A
transmitter and receiver combined in one unit is called
a transceiver.
The term transmitter is often abbreviated “XMTR” or
“TX” in technical documents. The purpose of most
transmitters is radio communication of information over
a distance. The information is provided to the
transmitter in the form of an electronic signal, such
as an audio (sound) signal from a microphone, a video
(TV) signal from a TV camera, or in wireless networking
devices a digital signal from a computer. The
transmitter combines the information signal to be
carried with the radio frequency signal which generates
the radio waves, which is often called the carrier.
This process is called modulation.
A radio transmitter is an electronic circuit which
transforms electric power from a battery or electrical
mains into a radio frequency alternating current, which
reverses direction millions to billions of times per
second. The energy in such a rapidly-reversing current

can radiate off a conductor (the antenna) as
electromagnetic waves (radio waves).
3.9.2 RECEIVER (RX)
A radio receiver is an electronic circuit that
receives its input from an antenna, uses electronic
filters to separate a wanted radio signal from all other
signals picked up by this antenna, amplifies it to a
level suitable for further processing, and finally
converts through demodulation and decoding the signal
into a form usable for the consumer, such as sound,
pictures, digital data, measurement values, navigational
positions, etc. Demodulation is the act of extracting the
original information-bearing
46

signal from a modulated carrier wave. A demodulator is
an electronic circuit that is used to recover the
information content from the modulated carrier wave.
The receiver in information theory is the receiving
end of a communication channel. It receives decoded
messages/information from the sender, who first encoded
them. Sometimes the receiver is modeled so as to
include the decoder. Real-world receivers like radio
receivers cannot be expected to receive as much
information as predicted by the noisy channel coding
theorem.
3.9.3 HKT6A TRANSMITTER
HKT6A transmitter is used is 6 channel, FM
modulating with a 2.4 GHz frequency band, the frequency
at which it transmits the modulated signal. the signal
transmitted by the transmitter is received by a HKT6A
receiver which de-modulates the signal to get the
original signal.
SPECIFICATIONS OF HKT6A TRANSMITTER
1.channel 2.fm modulation type 3.2.4ghz frequency band

4.power resource 1.5v * 8 ‘‘aa’’ battery 5.gfsk program type 6.led voltage display 7.weight : 575g 8.size : 189*97*218 mm 9.26 mm antenna length 10. Aileron rate switch11. Elevator dual rate switch
47

3.9.4 MODES OF A TRANSMITTER
Modes of a transmitter hk-t6a specify the working
of the transmitter, where the left gauge upward
movement specifies the throttle necessary for the lift.
The left gauge left-right movement specifies the yaw
angle.
Further the right gauge upward movement is for
controlling the pitch and the left-right movement to
control the roll. All the above explained specifies the
modes of transmitter necessary for controlling the
quad-copter in the air.
Fig 3.24 HKT6ATransmitter – Mode of Operation

A radio transmitter is an electronic circuit which
transforms electric power from a battery or electrical
mains into a radio frequency alternating current, which
reverses direction millions to billions of times per
second. The energy in such a
48

rapidly-reversing current can radiate off a conductor
(the antenna) as electromagnetic waves (radio waves).
Transmitter is used to modulate a original signal
onto the carrier wave, thus generating radio waves that
are transmitted to the receiver, which upon receive De-
modulates the signal and retrieve the original intended
signal.
3.9.5 HKT6A RECEIVER
SPECIFICATIONS OF HKT6A RECEIVER
1.channel 2.fm modulation type 3.2.4ghz frequency band 4.power resource 1.5v * 4 ‘‘aa’’ battery 5.gfsk program type 6.weight : 12g 7.size : 45*23*13.5 mm

Fig 3.25 HKT6A Receiver
49

3.10 BATTERY AND CHARGERS:The battery is an essential component of almost all
aircraft electrical systems. Batteries are used to
start engines and auxiliary power units, to provide
emergency backup power for essential avionics
equipment, to assure no-break power for navigation
units and fly-by-wire computers, and to provide ground
power capability for maintenance and preflight
checkouts. Many of these functions are mission
critical, so the performance and reliability of an
aircraft battery is of considerable importance.
Initially lead batteries and nickel-cadmium were used
but lately non-rechargeable lithium batteries, smaller
in size and with longer duration without maintenance
(up to 5 years), are rapidly replacing them.
Other important requirements include environmental
ruggedness, a wide operating temperature range, ease of
maintenance, rapid recharge capability, and tolerance
to abuse. Historically, only a few types of batteries
have been found to be suitable for aircraft
applications. Until the 1950s, vented lead-acid (VLA)
batteries were used exclusively [Earwicker, 1956]. In
the late 1950s, military aircraft began converting to

vented nickel-cadmium (VNC) batteries, primarily
because of their superior performance at low
temperature.
Fig 3.26 Diagram of Battery
50
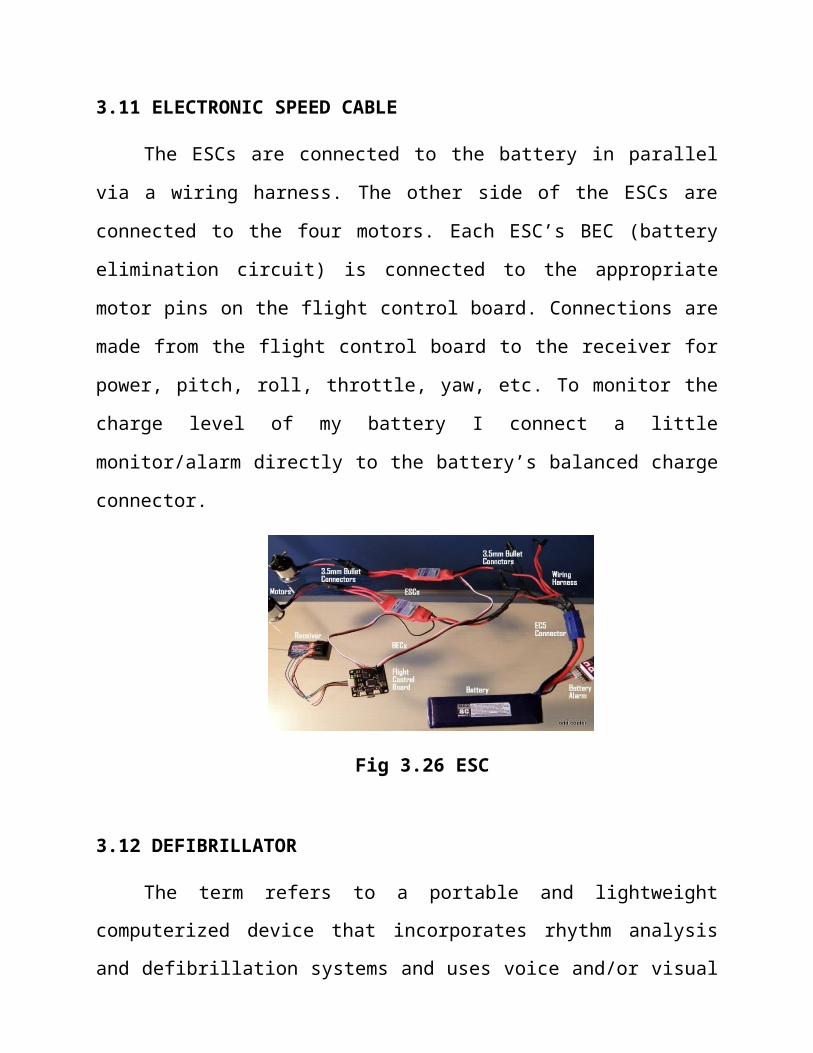
3.11 ELECTRONIC SPEED CABLE
The ESCs are connected to the battery in parallel
via a wiring harness. The other side of the ESCs are
connected to the four motors. Each ESC’s BEC (battery
elimination circuit) is connected to the appropriate
motor pins on the flight control board. Connections are
made from the flight control board to the receiver for
power, pitch, roll, throttle, yaw, etc. To monitor the
charge level of my battery I connect a little
monitor/alarm directly to the battery’s balanced charge
connector.
Fig 3.26 ESC
3.12 DEFIBRILLATOR
The term refers to a portable and lightweight
computerized device that incorporates rhythm analysis
and defibrillation systems and uses voice and/or visual

prompts to guide lay rescuers and healthcare providers
to safely defibrillate victims of cardiac arrest due to
VF or
Pulseless VT.There are two types of AED: the semi-automatic that
indicates the need for defibrillation but requires that
the operator deliver the shock by pushing a button and
the fully automatic Cardiac Defibrillation. Basically
these devices consist of a
51

battery, a capacitor, electrodes and an electricalcircuit designed to analyze the rhythm and send an
electric shock if is needed. The electrical shockdelivered to the patient is generated by high voltage
circuits from energy stored in a capacitor which canhold up to 7 kV of electricity. The energy delivered by
this system can be anywhere from 30 to 400 joules.
Electrodes are the components through which the
defibrillator collects information for rhythm analysis
and delivers energy to the patient's heart. Many types
of electrodes are available including hand-held
paddles, internal paddles, and self-adhesive disposable
electrodes. In general, disposable electrodes are
preferred in emergency settings because they increase
the speed of shock and improve defibrillation
technique.
The typical controls on an AED include a power
button, a display screen on which trained rescuers can
check de heart rhythm and a discharge button.
Defibrillators that can be operated manually have also
an energy select control and a charge button.
Certain defibrillators have special controls for
internal paddles or disposable electrodes.
Fig 3.27 Defibrillators52

CHAPTER 4
SOFTWARE TOOLSSoftware is used to compile the coding of the
desired application for the corresponding embedded
system.
4.1 KEIL MICROVISION3:This is the embedded C compiler which is compatible
for the 8051 microcontroller to compile the code.
Keil Software makes C compilers, macro assemblers,
real-time kernels, debuggers, simulators, integrated
environments and evaluation boards for the 8051, 251,
ARM and XC16x/C16x/ST10 microcontroller families.
Keil Software provides you with software development
tools for the 8051 family of microcontrollers. With
these tools you can generate embedded applications for
the multitude of 8051 derivatives. Keil provides
following tools for 8051 development
1.C51 Optimizing C Cross Compiler. 2.A51 Macro Assembler. 3.8051 Utilities (linker, object file converter,
library manager). 4.Source-Level Debugger/Simulator.

5.µVision for Windows Integrated DevelopmentEnvironment.
The keil 8051 tool kit includes three main tools, assembler, compiler and linker.
1.An assembler is used to assemble your 8051 assemblyprogram
2.A compiler is used to compile your C source codeinto an object file
3.A linker is used to create an absolute object
module suitable for your in-circuit emulator.
53

CHAPTER 5RESULTS AND CONCLUSION
5.1 EXPREMENTAL RESULTS:
Fig 5.1 Prototype of Quad Copter
The figure 5.1shows the normal and flying mode of
the quad copter controlled by remote operation which
carry’s the defibrillator which helps the lay rescuers
from cardiac arrest as a first aid.
Fig 5.2 GPS Screen Shot
The screen shows the GPS longitude latitude which

displayed on the monitor where the quad copter
located.
54

Fig 5.3 GSM Screen Shot
When the call arrives from the rescuers location
of them is founded by the tracking with GSM
5.2 CONCLUSION AND FUTURE WORK
In order to overcome the difficulties in
conventional operation and to manage the speed of
vehicle the quad copter should be designed perfectly.
the one great advancement of the system is the speed of
vehicle as it moves in airways.
In future ,the advanced wireless pc control is
implemented to operate the vehicle with more precisely
accurate information .the speed of vehicle is to

increased more by using more efficient motors according
to that the design of quad copter should subject to
change.
55

APPENDICES
INTERFACING 8051 WITH ZIGBEE
INTERFACING 8051 WITH GPS

56

REFERENCES
1.AUVS– The Association of Unmanned VehicleSystems .
2.BEAR – The Berkeley Aerobot
Project.
http://robotics.eecs.berkel
ey.edu/bear/.
3.CMU – The Autonomous Helicopter Project .
http://www.cs.cmu.edu/afs/cs/project/chopper/www
/ heli project.html.
4.Computational Semantics Laboratory, Center for the
Study of Language and Information (CSLI) .
http://www-csli.stanford.edu/semlab/witas.html .
5.Scandi scraft Systems, Sweden.http://www.scandicraft.se /
6.The Hummingbird Project – Stanford
University . http://sun-valley.stanford.edu/users/heli/.
7.The NASA Deep Space I Project .http://ic.arc.nasa.gov/ic/autonomy.html .
8.UAVRF – The Unmanned Aerial Vehicle
Research Facility.
http://controls.ae.gatech.edu/labs/uavrf
/.
9.WITAS UAV Project Web Site.

http://www.ida.liu.se/ext/witas/ . 10. Yamaha Motor Co., Ltd., Japan.
http://www.yamaha-motor.co.jp/sky - e/index.html
.
11. P. Doherty, ‘The WITAS integrated software system
architecture’, Link¨oping Electronic Articles in
Computer and Information Science, 4(17), (1999).
http://www.ep.liu.se/ea/cis/1999/017 /
12. R. J. Firby, P.N. Propopowicz, and M.J. Swain,
‘The animate agent architecture’, in Artificial
Intelligence and Mobile Robots: Case Studies of
Successful Robot Systems, eds., D. Kortenkamp,
R.P. Bonasso, and R. Murphy, AAA Press/The MIT
Press, (1998).
57

13. E. Gat, ‘Three-layered architectures’, in Artificial
Intelligence and Mobile Robots: Case Studies of
Successful Robot Systems, eds., D. Kortenkamp, R.P.
Bonasso, and R. Murphy, AAA Press/The MIT Press, (1998).
14. G. Granlund, K. Nordberg, J. Wiklund, P. Doherty, E.
Skarman, and E. Sandewall, ‘WITAS: An intelligent
autonomous aircraft using an active vision system’, in
Proceedings of the 2nd Int’l Symposium on Uninhabited
Aerial Vehicles, (June 2000).
15. E. Skarman, ‘An aircraft model’, Link¨oping
Electronic Articles in Computer and Information
Science, 4(013), (1999).
http://www.ep.liu.se/ea/cis/1999/013/.
16. E. Skarman, ‘A helicopter model’, Link¨oping
Electronic Articles in Computer and Information Science, 4(014), (1999).
http://www.ep.liu.se/ea/cis/1999/014/.
17. U. S¨oderman and S. Ahlberg. Konstgjorda verkligheter
framst¨alls p˚al¨opande band, FOA Tidningen, number 6,
December, 1999. Published by the Swedish Defence
Reserach Institute.

58

xi
Copyright © 2022 FDOKUMEN




















