
UNIVERSIDAD POLITÉCNICA SALESIANA MÁQUINAS ELÉCTRICAS II TRABAJO DE INVESTIGACIÓN INTEGRANTES
27
UNIVERSIDAD POLITÉCNICA SALESIANA MÁQUINAS ELÉCTRICAS II TRABAJO DE INVESTIGACIÓN INTEGRANTES: MARÍA JOSÉ ANDRADE JAIME CURAY GUADALUPE IBAÑEZ ALEJANDRA LÓPEZ 15/11/2013
-
Upload
independent -
Category
Documents
-
view
5 -
download
0
Transcript of UNIVERSIDAD POLITÉCNICA SALESIANA MÁQUINAS ELÉCTRICAS II TRABAJO DE INVESTIGACIÓN INTEGRANTES

UNIVERSIDAD POLITÉCNICA SALESIANA
MÁQUINAS ELÉCTRICAS II
TRABAJO DE INVESTIGACIÓN
INTEGRANTES:
MARÍA JOSÉ ANDRADE
JAIME CURAY GUADALUPE IBAÑEZ ALEJANDRA LÓPEZ
15/11/2013

MOTORES DE CORRIENTE CONTINUA SIN ESCABILLAS Y
ELECTRÓNICAMENTE CONMUTADOS
Actualmente la construcción de motores DC sin escobillas resulta muy
ventajosa, gracias a su bajo costo de fabricación y producción, al peso y en cierta medida a su mantenimiento y control. Los primeros motores sin escobillas implementados fueron los motores de corriente alterna asíncronos,
hoy en día se pueden desarrollar gran variedad de motores DC y AC de este tipo de topología.
A continuación y a lo largo de este artículo se detallará el principio de
funcionamiento y las principales características que identifican al motor de corriente directa sin escobillas, el cual resulta bastante interesante a la hora de su estudio gracias a sus diversas propiedades y a sus potenciales aplicaciones
prácticas.
Un motor que conserva las características de un motor de corriente continua, pero elimina el conmutador y las escobillas se llama un motor sin escobillas de corriente continua. Un motor DC sin escobillas se compone de un devanado
multifásico en un estator de polos no salientes y un rotor PM radialmente magnetizado. La Figura 1 muestra un diagrama esquemático de un motor de
corriente continua sin escobillas. El devanado multifásico puede ser una sola bobina o estar distribuido en el
espacio de los polos. La tensión directa o alternase aplica a los devanados de fase individuales a través de una operación de conmutación secuencial para
lograr la conmutación necesaria para lograr la rotación. La conmutación se realiza electrónicamente utilizando transistores de potencia o tiristores. Por ejemplo, si el devanado 1 se energiza, el rotor PM se alinea con el campo
magnético producido por la bobina 1. Cuando el devanado 1 está desconectado mientras devanado 2está encendido, el rotor se hace girar para alinearse con
el campo magnético del devanado 2.
Fig. 1. Motor DC sin escobillas

Un motor si escobillas es un motor que no emplea escobillas para realizar el
cambio de polaridad en el rotor. Los motores eléctricos solían tener un colector de delgas o un par de anillos rosantes. Estos sistemas, que producen
rozamiento, disminuyen el rendimiento, desprenden calor y ruido, requieren mucho mantenimiento y pueden producir partículas de carbón que manchan el motor de un polvo que además puede ser conductor.
La característica principal de los motores DC sin escobillases que rea l iza la
misma func ión de un motor DC normal pero remplazando el conmutador y las escobillas por switches de estado sólido que funcionan con una lógica para la con-mutación de los embobinados. Se puede
concluir que la gran ventaja de los motores DC sin escobillas, frente a los demás motores de alimentación continua, es que no requieren de un
mantenimiento periódico.
Fig. 2 Esquema de un motor de corriente contínua sin escobillas.
En la actualidad con el desarrollo acelerado de la industria automotriz se ha propuesto el uso más efectivo de los motores eléctricos ya que son más
eficientes asi como son más ecoómicos además a nivel ambiental causan menos contaminación, por estas razones existen un grupo de motores
eléctricos que atisfacen las necesidades actuales, entre los motores dc más conocidos tenemos los motores eléctricos BRUSHLESS DC (motores DC sin escobillas), conocidos también como motores DC síncronos.
Los motores BLDC tienen la característica de que no emplean escobillas en la
conmutación para la transferencia de energía; en este caso, la conmutación se realiza electrónicamente. Esta propiedad elimina el gran problema que poseen

los motores eléctricos convencionales con escobillas, los cuales producen
rozamiento, disminuyen el rendimiento, desprenden calor, son ruidosos y requieren una sustitución periódica y, por tanto, un mayor mantenimiento.
ESTRUCTURA BÁSICA
Fig.3
Fig. 3 Despiece de un Motor Brushle DC
El rotor es un elemento magnético permanente y el estator está formado por
embobinados al igual que un motor AC de varias fases. La principal diferencia entre estos dos tipos de motores e la forma de detectar la posición del rotor
para poder saber cómo se encuentran los polos magnéticos. Y mediante ellos poder generar las señales de control mediante el empleo de switches electrónicos.
El censado de la ubicación de los polos magnéticos en los motores DC sin
escobillas normalmente se hace con sensores de efecto Hall, aunque existen modelos que utilizan sensores ópticos, que funcionan de manera similar a los encoders.
Actualmente, los motores BLDC se emplean en sectores industriales tales
como: Automóvil, Aeroespacial, Consumo, Médico, equipos de automatización e instrumentación.
FUNCIONAMIENTO:
El rotor del motor se encuentra sujeto a una especie de láminas que van girando con éste y es el objeto que obstruye la luz, a los foto- transistores, col
los que se obtiene los estados de los sensores que determinan las variables de entrada a la lógica que se realiza el movimiento. A continuación tenemos un esquema en el cual podemos observar cómo está compuesto el motor:

Fig. 4 Sensores de Efecto Hall
Se puede observar que mientras PT1 está recibiendo luz, PT2 y PT3 están
tapados por la lámina por lo cual se sabe en posición se encuentra el rotor al momento de la toma de datos.
Una vez que se conoce la lógica del motor se comienza a seguir la lógica secuencial para moverlo a una velocidad determinada, esto se logra
energizando las bobinas del estator en diferentes tiempos.
Para alimentar los embobinados se utiliza un control seguidos de una etapa de salida de transistores, que cumplan con los requerimientos de velocidad y potencia, luego pasa la corriente por las fases dependiendo de la posición del
rotor. Es decir PT1 se encuentra prendido mientras que PT2 y PT3 se encuentran apagados y luego la lógica decide por cual bobinados decide pasar
corriente.
Fig. 5 Acople sencillo de sensores y fases.
CUADRO DE COMPARACIÓN Los motores BLDC tienen muchas ventajas frente a los motores DC con
escobillas y frente a los motores de inducción. A continuación enunciaremos el

siguiente cuadro en el cual se encuentran las principales ventajas de estos
motores:
MOTORES LSPM (Line Start Permanent Magnet)
SEW EURODRIVE ha desarrollado un nuevo concepto de eficiencia energética
basada en la tecnología LSPM (Line Start Permanent Magnet) presente en sus nuevos motores DR.
El nuevo motor DR...J es un motor AC asíncrono trifásico cuyo rotor de jaula de ardilla contiene imanes permanentes. Después de un arranque asíncrono, el
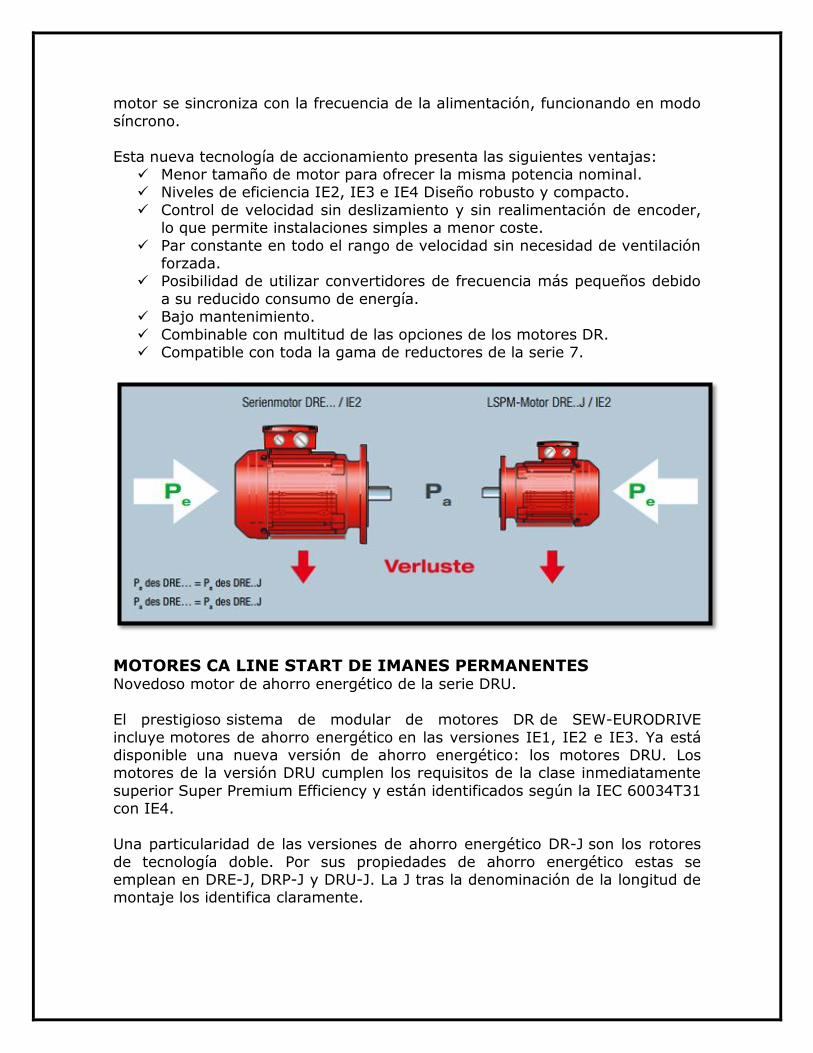
motor se sincroniza con la frecuencia de la alimentación, funcionando en modo
síncrono.
Esta nueva tecnología de accionamiento presenta las siguientes ventajas: Menor tamaño de motor para ofrecer la misma potencia nominal. Niveles de eficiencia IE2, IE3 e IE4 Diseño robusto y compacto.
Control de velocidad sin deslizamiento y sin realimentación de encoder, lo que permite instalaciones simples a menor coste.
Par constante en todo el rango de velocidad sin necesidad de ventilación forzada.
Posibilidad de utilizar convertidores de frecuencia más pequeños debido
a su reducido consumo de energía. Bajo mantenimiento.
Combinable con multitud de las opciones de los motores DR. Compatible con toda la gama de reductores de la serie 7.
MOTORES CA LINE START DE IMANES PERMANENTES Novedoso motor de ahorro energético de la serie DRU.
El prestigioso sistema de modular de motores DR de SEW-EURODRIVE
incluye motores de ahorro energético en las versiones IE1, IE2 e IE3. Ya está disponible una nueva versión de ahorro energético: los motores DRU. Los motores de la versión DRU cumplen los requisitos de la clase inmediatamente
superior Super Premium Efficiency y están identificados según la IEC 60034T31 con IE4.
Una particularidad de las versiones de ahorro energético DR-J son los rotores
de tecnología doble. Por sus propiedades de ahorro energético estas se emplean en DRE-J, DRP-J y DRU-J. La J tras la denominación de la longitud de montaje los identifica claramente.
Así mismo, la versión DR-J (Line Start Permanent Magnet) es una versión de
tamaño reducido y ahorro energético del sistema modular de motores DR. Esta tecnología se basa en la incorporación de la jaula de ardilla de los motores
asíncronos de CA con imanes permanentes ocultos.
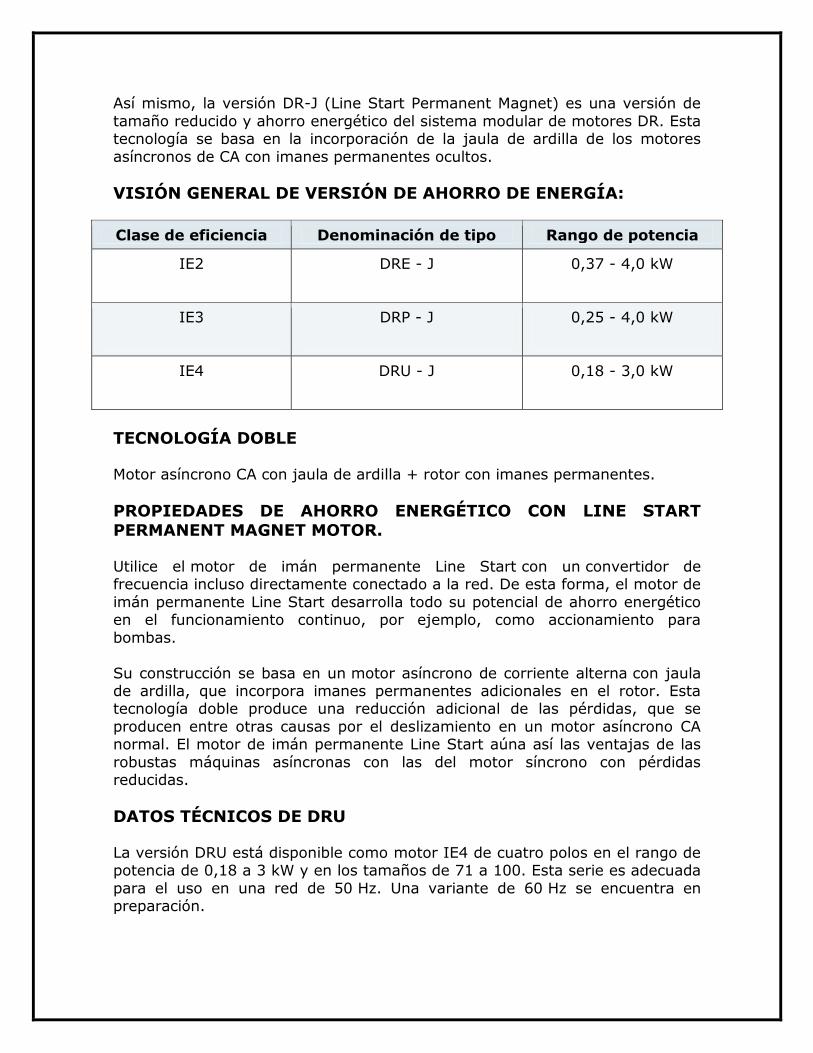
VISIÓN GENERAL DE VERSIÓN DE AHORRO DE ENERGÍA:
Clase de eficiencia Denominación de tipo Rango de potencia
IE2 DRE - J 0,37 - 4,0 kW
IE3 DRP - J 0,25 - 4,0 kW
IE4 DRU - J 0,18 - 3,0 kW
TECNOLOGÍA DOBLE
Motor asíncrono CA con jaula de ardilla + rotor con imanes permanentes.
PROPIEDADES DE AHORRO ENERGÉTICO CON LINE START PERMANENT MAGNET MOTOR. Utilice el motor de imán permanente Line Start con un convertidor de frecuencia incluso directamente conectado a la red. De esta forma, el motor de
imán permanente Line Start desarrolla todo su potencial de ahorro energético en el funcionamiento continuo, por ejemplo, como accionamiento para
bombas.
Su construcción se basa en un motor asíncrono de corriente alterna con jaula de ardilla, que incorpora imanes permanentes adicionales en el rotor. Esta tecnología doble produce una reducción adicional de las pérdidas, que se
producen entre otras causas por el deslizamiento en un motor asíncrono CA normal. El motor de imán permanente Line Start aúna así las ventajas de las
robustas máquinas asíncronas con las del motor síncrono con pérdidas reducidas.
DATOS TÉCNICOS DE DRU
La versión DRU está disponible como motor IE4 de cuatro polos en el rango de potencia de 0,18 a 3 kW y en los tamaños de 71 a 100. Esta serie es adecuada
para el uso en una red de 50 Hz. Una variante de 60 Hz se encuentra en preparación.

RESUMEN DE LAS CARACTERÍSTICAS Estándares de eficiencia energética IE2 (DRE), IE3 (DRP) e IE4 (DRU).
Funcionamiento con convertidor de frecuencia. Funcionamiento en red.
Velocidad síncrona para frecuencia de alimentación. Diseño compacto. Integrado en el sistema modular de motores DR.
ARTICULO: Xylem introduce agitador compacto de alta eficiencia
equipado con tecnología de imán permanente. http://www.treatment.xyleminc.com/sp/4650_lpsm.aspx.
Estocolmo, Suecia, 17 de junio, 2009 - Xylem ha lanzado hoy por todo el mundo un agitador compacto que proporciona ahorros sustanciales en el
consumo de energía. El motor del nuevo agitador Flygt 4650 LSPM utiliza la tecnología de imán permanente de arranque en línea (LSPM, Line-Started
Permanent-Magnet) para ofrecer una eficiencia óptima en cuanto a empuje y alimentación eléctrica.
"La eficiencia del motor de LPSM es significativamente superior a la de los
motores de agitador equivalentes de 12 polos," dice Andreas Lindberg, jefe de producto de agitadores. "Este tipo de agitador puede arrancarse en línea, y va provisto de una jaula de inducción e imanes en el propio rotor."
"Su motor híbrido," continúa diciendo, "utiliza la tecnología de imán permanente síncrono de alta eficiencia". Se está tramitando la patente.
Dependiendo del ángulo de la hélice y otras configuraciones, el agitador Flygt 4650 LSPM puede ofrecer un consumo de energía el 10-20% menor, un 15%
de mayor eficiencia en el motor y un consumo de corriente el 40% más bajo en comparación con los agitadores compactos estándar.
Con una gama de empuje de 1 000 a 3 000 newton, las aplicaciones del Flygt 4650 LSPM abarcan el tratamiento de aguas residuales biológicas, la
desnitrificación y el procesado de fangos, y así como tareas de perforación, agricultura y otros fines.
El Flygt 4650 LSPM es el resultado de una labor de investigación y desarrollo considerable en Xylem a lo largo de los años. "Hasta la fecha la tecnología de
LSPM se ha usado para otras aplicaciones, y ahora ofrecemos al mercado las

ventajas de un motor de LSPM en un agitador compacto," termina diciendo
Andreas Lindberg. Extensas pruebas prácticas realizadas en Europa han dado unos resultados excelentes en cuanto a eficiencia y duración.
MOTORES DE RELUCTANCIA CONMUTADA
DEFINICIÓN
El motor de reluctancia conmutada se alimenta de corriente continua y no
requiere de escobillas ni imanes permanentes. Su constitución habitual presenta una estructura magnética de polos salientes tanto en el estator como en el rotor. En los polos del estator se colocan las bobinas que, conectadas en
pares diametralmente opuestos, forman las fases del motor, mientras que el rotor está hecho de láminas de acero sin conductores.
Se utiliza un convertidor electrónico para energizar las fases y un sensor para obtener información de la posición rotórica.
Esquema básico de un motor de reluctancia
conmutada.
Cuando se energiza una fase del estator, se produce un campo magnético que
atrae un par de los elementos salientes del rotor desde una posición de no alineamiento hasta la posición de alineamiento con la fase; una excitación
secuencial de las fases hace que el rotor gire y, secuencialmente, se vaya alineando a las fases energizadas del estator. El sensor de posición suministra
la información necesaria para la sincronización de la secuencia de conmutación de las fases.
VENTAJAS Y DESVENTAJAS Recientemente se le está prestando mucha atención al motor de reluctancia conmutada debido a que la máquina tiene ventajas sobre otros tipos de
máquinas AC, principalmente por su robustez y simplicidad mecánica. El rotor, al tener una estructura laminada sencilla sin bobinados o imanes, puede operar
a altas velocidades y en ambientes peligrosos, además su simplicidad reduce

los costos de manufactura y su producción en masa es más sencilla. Es una
máquina robusta en la que cada fase es independiente física, magnética y eléctricamente, por lo que el convertidor es independiente y menos propenso a
fallos. Sin embargo el motor de reluctancia conmutada es una máquina de estructura
de polos salientes, por lo tanto tiene características altamente no lineales, lo cual complica su análisis y control. Además el motor presenta un fuerte rizado
en el par y efectos de ruido.
CARACTERÍSTICAS MAGNÉTICAS. El voltaje instantáneo en los terminales de la fase k se relaciona con el enlace
de flujo por la ley de Faraday de acuerdo con la siguiente ecuación:
Debido a la construcción de polos salientes del motor y a los efectos de saturación en los que opera la máquina, el enlace de flujo y depende de la posición del rotor q y de la corriente de fase. Además es difícil describir y
mediante una ecuación simple, por lo que se necesitan datos experimentales o cálculos por medio de análisis de elementos finitos para su descripción. La
ecuación puede expandirse como:
Es necesario tener una representación matemática del enlace de flujo para su utilización en la simulación. Esto se puede lograr ajustando las mediciones
experimentales a expresiones matemáticas por medio de programas de ajuste de curvas. Se puede utilizar una expresión polinómica para el ajuste,
separando los efectos de los dos argumentos, posición del rotor y corriente en el enlace de flujo.
Donde las funciones angulares son:

En la expresión anterior los coeficientes del polinomio dependen de la posición
del rotor, mientras que el polinomio está en función de la corriente. El ajuste resulta satisfactorio empleando una serie de cosenos de seis términos, donde
Nr es el número de polos del rotor.
Curvas de flujo en el motor en función de la corriente,
con la posición del rotor como parámetro.
PRODUCCIÓN DE PAR La expresión general del par producido por una fase k es:
Donde W’ es la coenergía y es el área bajo la curva de magnetización para una
determinada posición, mientras que la energía almacenada, W, es el área por encima de la curva de magnetización. La co-energía puede expresarse a través
de:

Definición de la co-energía, W’, y de la energía, W,
en función de la curva de magnetización de la máquina de
reluctancia conmutada.
En el motor aparecen niveles muy bajos de acoplamiento magnético entre las fases, por tanto la superposición de los pares individuales de las m fases produce el par interno total, Tt:
Finalmente, utilizando la ecuación del flujo (4) se obtiene la expresión del par:
Donde las derivadas de las funciones angulares son:

FUNCIONAMIENTO
El principio de funcionamiento del motor de reluctancia conmutado, que en
muchas publicaciones de habla inglesa aparece bajo el nombre de “Switched-Reluctance- Motor”, es fácilmente imaginable: Un eje de hierro que puede girar
apoyado sobre unos rodamientos, o también los dientes de un rotor de hierro, se orientan en un campo magnético producido gracias a una corriente eléctrica
en los polos del estator. Mediante una determinada conmutación del campo magnético se conseguirá un movimiento rotatorio del núcleo de hierro. En el caso de que este rotor posea más dientes, se puede comparar su forma a la de
una rueda dentada de gran espesor.
El concepto “Reluctancia” corresponde la resistencia magnética, la cual opone dicho rotor al campo electromagnético. La generación y posterior conmutación del campo magnético se realiza en los bobinados de los polos de la parte fija
de la máquina, a través de la electrónica de potencia conectada al motor. Con la electrónica de potencia, mediante la cual nos referimos al convertidor de
corriente así como al convertidor de frecuencia, se pueden influir de la manera deseada tanto en las revoluciones como en el par de giro del motor.
Los motores de reluctancia conmutados permiten ser realizados desde los accionamientos más pequeños hasta los grandes motores.
Corte transversal de un motor de reluctancia conmutado
CLASIFICACIÓN DE LOS MOTORES SEGÚN LAS NORMAS NEMA/ANSI E IEC
INTRODUCCIÓN
El instituto encargado de preparar, revisar y analizar las normas técnicas en la fabricación de motores eléctricos a nivel internacional es la Comisión

Electrotécnica Internacional (I.E.C.), con sede en Suiza, y en los Estados
Unidos de Norte América lo hace la Asociación de Fabricantes Eléctricos Nacionales (NEMA).
A nivel mundial los fabricantes de motores adoptan las normas de marcación de terminales de acuerdo con la normalización vigente en su respectivo país,
derivadas principalmente de las normativas I.E.C. y NEMA. .
Destacándose que en los motores fabricados bajo norma NEMA sus cables de conexión son marcados con números desde el 1 al 12 y los fabricados bajo norma IEC tienen una marcación que combina las letras U, V, W y los números
desde el 1 hasta el 6.
Por ejemplo:
Los diseños incluyen las tensiones a las cuales podrán ser energizados y cada norma en particular realiza su marcación de terminales de conexión. La gran
mayoría de fabricantes diseñan los motores con bobinados para operar a dos (2) tensiones de servicio, destacándose que los Motores NEMA tienen una
relación de conexionado de 1:2, es decir que una tensión es el doble de la otra. Ejemplo: 230/460 V y en los Motores IEC se presenta un diseño con una relación de 1:1,732, Ej. 220/380 V.
Existen diseños en los cuales esto no se cumple y se fabrican motores para
operar a un sólo voltaje y con una sola conexión.
CLASIFICACIÓN DE MOTORES SEGÚN LA NORMA NEMA Según las normas NEMA los motores se pueden clasificar de la siguiente
manera:
a) Según el esfuerzo que va a realizar el motor. Motor de Diseño NEMA A
Torque alto, deslizamiento nominal bajo y corriente de arranque alta. Es un motor de inducción con rotor tipo jaula de ardilla, diseñado con características
de torque y corriente de arranque que exceden los valores correspondientes al

diseño NEMA B, son usados para aplicaciones especiales donde se requiere un
torque máximo mayor que el normal, para satisfacer los requerimientos de sobrecargas de corta duración. Estos motores también son aplicados a cargas
que requieren deslizamientos nominales muy bajos y del orden del 1% o menos (velocidades casi constantes).
Motor de diseño NEMA B Torque normal, corriente de arranque normal y deslizamiento nominal normal.
Son motores con rotor tipo jaula de ardilla diseñados con características de torque y corriente de arranque normales, así como un bajo deslizamiento de carga de aproximadamente 4% como máximo. En general es el motor típico
dentro del rango de 1 a 125 HP. El deslizamiento a plena carga es de aproximadamente 3%. Este tipo de motor proporcionará un arranque y una
aceleración suave para la mayoría de las cargas y también puede resistir temporalmente picos elevados de carga sin detenerse.
Motor de diseño NEMA C Torque alto, deslizamiento nominal normal, corriente de arranque normal. Son
motores de inducción con rotor de doble jaula de ardilla, que desarrollan un alto torque de arranque y por ello son utilizados para cargas de arranque
pesado. Estos motores tienen un deslizamiento nominal menor que el 5%. Motor de diseño NEMA D
Torque alto, alto deslizamiento nominal, baja corriente de arranque. Este motor combina un alto torque de arranque con un alto deslizamiento nominal
En la siguiente tabla se puede apreciar una mejor descripción de los diferentes diseños NEMA y otros diseños adicionales. Las curvas carcteristicas de torque velocidad de los diferentes diseños son.

Diseño NEMA
Características Polifásicas
Torque de arranque
Torque de aceleración
Torque de frenado
Corriente de arranque
Desliza-miento
Aplicaciones típicas Eficiencia relativa
Porcentaje de torque de carga
Porcentaje de torque de carga
Porcentaje de torque de carga
Porcentaje de torque de carga
%
A Alto torque arranque y alta corriente de arranque
70-275 65-190 175-300 No definido 0.5- 5 Ventiladores, sopladores, bombas centrifugas juego motor-generador donde el torque inicial es relativamente bajo
Media o alta
B Normal torque de arranque y normal corriente de arranque
70-275 65-190 175-300 600-700 0.5 - 5 Ventiladores, sopladores, bombas centrifugas juego motor-generador donde el torque inicial es relativamente bajo
Medio o alto
C Alto torque de arranque y normal corriente de arranque
200-285 140-195 190-225 600-700 1-5
Cintas transportadoras, trituradoras, motores de agitación, bombas reciprocas y compresores, etc. donde el inicio con carga es requerido
medio
D Alto torque de arranque y alto deslizamiento
275 NA 275 600-700 5 - 8
Cargas con picos altos con o sin volante tales como prensas, tijeras, elevadores, extractores, tornos, montacargas, bombas petroleras
bajo
N Motor pequeño - N/A - - N/A Cargas centrifugas donde el torque inicial requerido es relativamente bajo
bajo
O Motor pequeño - N/A - - N/A
L Motor pequeño - 100% - - N/A Ventiladores, sopladores, bombas centrifugas juego motor-generador donde el torque inicial es relativamente bajo
Medio o bajo
M Motor pequeño - 100% - - N/A Ventiladores, sopladores, bombas centrifugas juego motor-generador donde el torque inicial es relativamente bajo
Medio o alto

Diseños tipo NEMA características y aplicaciones
b) Aislamiento térmico
Respecto al aislamiento termico las clases definidas para la temperatura de operación maxima permitida para un motor en operación segura y continua a
carga completa es: Clase Temperatura maxima de
operacion Aumento de temperatura permitida a carga completa
SF=1.0 SF=1.15
A 105°C 221°F 69°C 70°C
B 130°C 266°F 80°C 90°C
E 120°C 248°F 75°C -
F 155°C 311°F 105°C 110°C
H 180°C 356°F 125°C -
c) Según los Kva En el instante que un motor empieza a funcionar, su velociad es cero RPM y la
corriente producida es igual a la RLA(amperios de arranque). La siguiente tabla de grupos de motores dependen de la LRA expresado en kilovolta-ampers,
donde una sola letra es usada para definir los dos valores de voltaje en corriente de arranque en motores con voltajes duales.
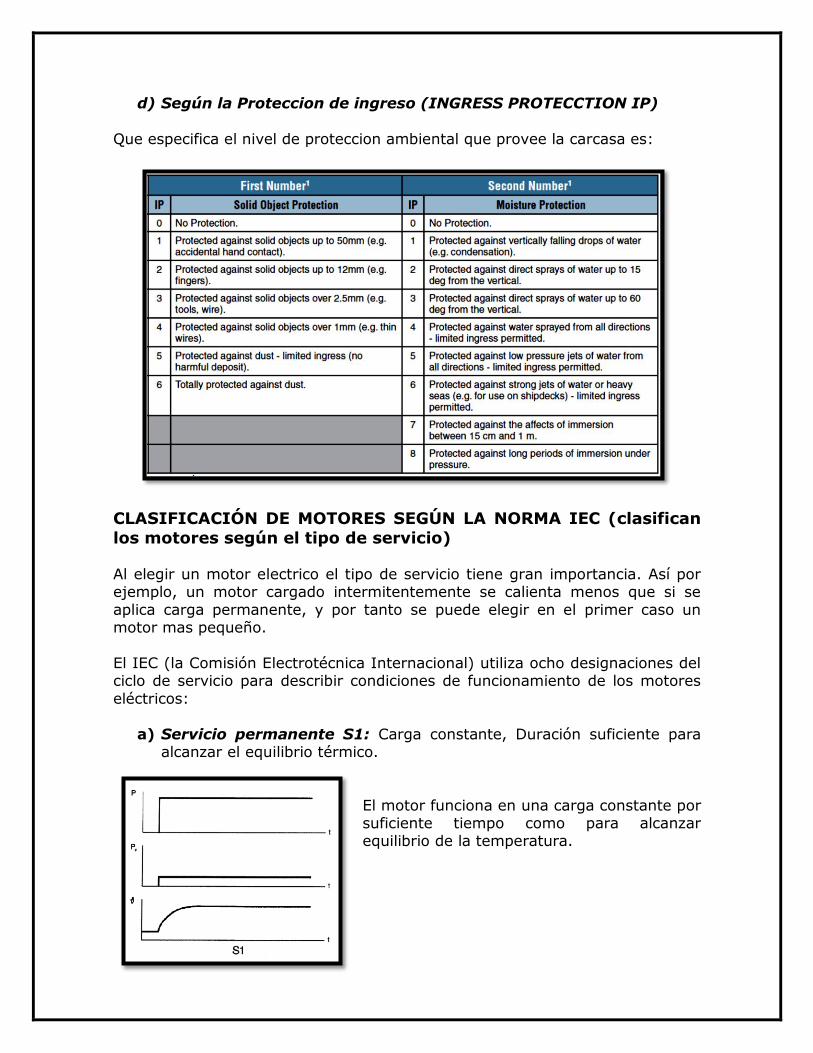
d) Según la Proteccion de ingreso (INGRESS PROTECCTION IP)
Que especifica el nivel de proteccion ambiental que provee la carcasa es:
CLASIFICACIÓN DE MOTORES SEGÚN LA NORMA IEC (clasifican
los motores según el tipo de servicio) Al elegir un motor electrico el tipo de servicio tiene gran importancia. Así por ejemplo, un motor cargado intermitentemente se calienta menos que si se
aplica carga permanente, y por tanto se puede elegir en el primer caso un motor mas pequeño.
El IEC (la Comisión Electrotécnica Internacional) utiliza ocho designaciones del ciclo de servicio para describir condiciones de funcionamiento de los motores
eléctricos:
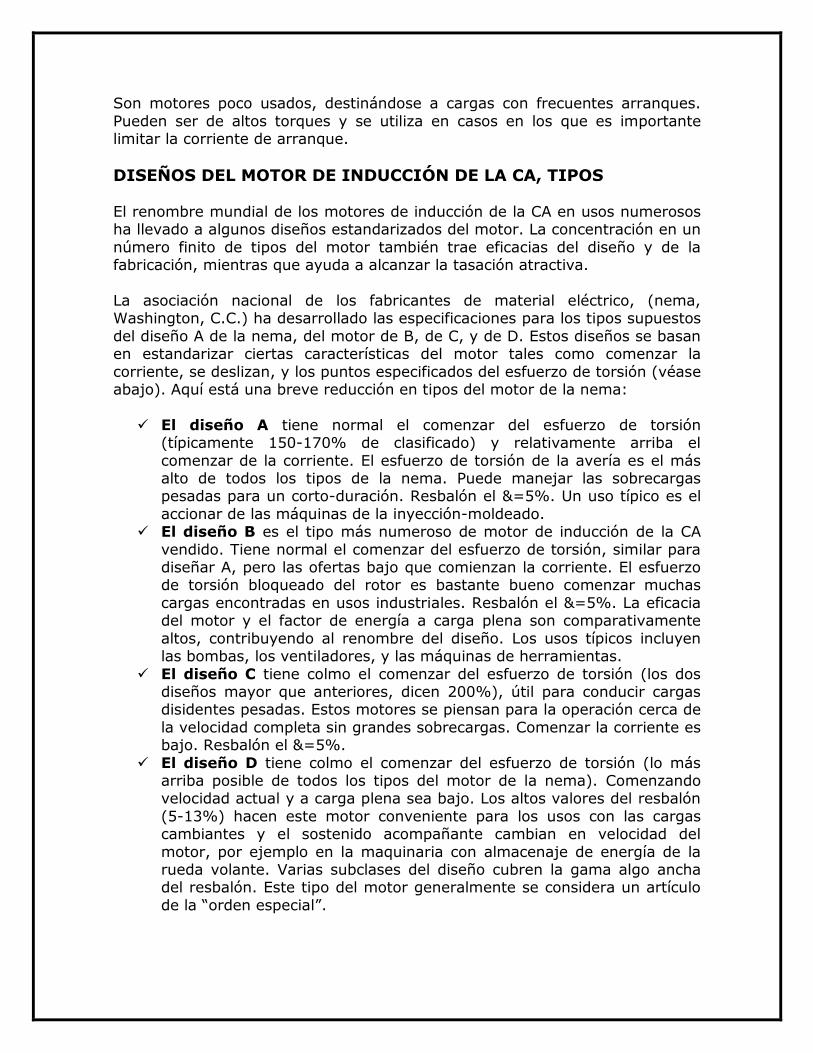
a) Servicio permanente S1: Carga constante, Duración suficiente para alcanzar el equilibrio térmico.
El motor funciona en una carga constante por suficiente tiempo como para alcanzar equilibrio de la temperatura.

b) Servicio de corta duración S2: Carga constante, Duración no
suficiente para alcanzar el equilibrio térmico. Parada muy larga.
El motor funciona en una carga constante, pero no suficiente tiempo como para alcanzar el equilibrio de la
temperatura. Los periodos de descanso son suficientemente largos para que el
motor alcance temperatura ambiente.
c) Servicio intermitente sin influencia del arranque S3:
Funcionamiento secuencial con idénticos ciclos de funcionamiento y descanso con
carga constante. El equilibrio de la temperatura nunca se alcanza.
La corriente de arranque tiene poco efecto sobre el aumento de temperatura.
d) Servicio intermitente con influencia del arranque S4: Las pérdidas y su duración hacen que la fase de arranque no pueda ignorarse.
Funcionamiento secuencial con idénticos
ciclos de arranque, funcionamiento y descanso con carga constante. El
equilibrio de la temperatura no se alcanza, pero la corriente de arranque afecta el incremento de la temperatura.

e) Servicio intermitente con influencia de frenado y arranque S5:
Frenado eléctrico con devolución de potencia a la red.
Funcionamiento secuencial,
idénticos ciclos de arranque y de funcionamiento con carga constante y trabajo en vacío, no
hay periodos de descanso.
f) Servicio intermitente con giro permanente y ciclos alternados de
la máquina en carga y en vacío S6:
Funcionamiento secuencial,
idénticos ciclos de funcionamiento con carga constante y en vacío, no hay
periodos de descanso.
g) Servicio ininterrumpido con arranques y frenados eléctricos S7
Ciclos secuenciales idénticos de arranque y funcionamiento a carga
constante y frenado eléctrico, no hay periodos de descanso.

h) Servicio ininterrumpido con variaciones periódicas de velocidad
S8
Funcionamiento secuencial, idénticos ciclos de trabajo de funcionamiento a carga
constante, luego funciona a otra carga constante y
velocidad, no hay periodos de descanso.
MOTORES NEMA Estos motores provienen de los motores polifásicos de inducción. Suponiendo que un motor de inducción comercial de jaula de ardilla se haga arrancar con
el voltaje nominal de las terminales de línea de su estator desarrollará un par de arranque que hará que aumente la velocidad. Al aumentar la velocidad a
partir del reposo (100% de deslizamiento) disminuye su deslizamiento y su par disminuye hasta que se desarrolla un par máximo. Esto hace que la velocidad aumente todavía más, reduciéndose en forma simultánea el deslizamiento y el
par que desarrolla el motor de inducción.
Los pares desarrollados al arranque y al valor de desplazamiento que produce el par máximo, en ambos exceden el par de la carga, por lo tanto la velocidad
del motor aumentará hasta que el valor de desplazamiento sea tan pequeño que el par que se desarrolla se reduzca a un valor igual al aplicado por la carga. El motor continuará trabajando a esa velocidad y el valor de equilibrio
del desplazamiento, hasta que aumente o disminuya el par aplicado.
La característica esencial que distingue a una máquina de inducción de los demás motores eléctricos es que las corrientes secundarias son creadas únicamente por inducción.
Cuando se desarrolló por primera vez el rotor de doble jaula de ardilla se creó
tal variedad y adaptabilidad en el diseño de rotores para motores de inducción que ha llevado a diversas características de curva deslizamiento - par. Al dar la proporción correcta al devanado de doble jaula de ardilla, los fabricantes han
desarrollado numerosas variaciones del diseño del rotor de vaciado o normal único. Estas variaciones tienen por consecuencia pares de arranque mayores o
menores que el diseño normal y también menores corrientes de arranque.

Para distinguir entre diversos tipos disponibles, la National Eléctrical Manufacturers Association (NEMA) ha desarrollado un sistema de identificación
con letras en la cual cada tipo de motor comercial de inducción de jaula de ardilla se fabrica de acuerdo con determinada norma de diseño y se coloca en determinada clase, identificada con una letra.
MOTORES DE INDUCCION DE JAULA DE ARDILLA CLASE A El motor clase A es un motor de jaula de ardilla normal o estándar fabricado
para uso a velocidad constante. Tiene grandes áreas de ranuras para una muy buena disipación de calor, y barras con ranuras ondas en el motor. Durante el periodo de arranque, la densidad de corriente es alta cerca de la superficie del
rotor; durante el periodo de la marcha, la densidad se distribuye con uniformidad. Esta diferencia origina algo de alta resistencia y baja reactancia
de arranque, con lo cual se tiene un par de arranque entre 1.5 y 1.75 veces el nominal (a plena carga). El par de arranque es relativamente alto y la baja resistencia del rotor produce una aceleración bastante rápida hacia la velocidad
nominal. Tiene la mejor regulación de velocidad pero su corriente de arranque varía entre 5 y 7 veces la corriente nominal normal, haciéndolo menos
deseable para arranque con línea, en especial en los tamaños grandes de corriente que sean indeseables.
MOTORES DE INDUCCION DE JAULA DE ARDILLA CLASE B
A los motores de clase B a veces se les llama motores de propósito general; es muy parecido al de la clase A debido al comportamiento de su deslizamiento-
par. Las ranuras de su motor están embebidas algo más profundamente que el los motores de clase A y esta mayor profundidad tiende a aumentar la reactancia de arranque y la marcha del rotor. Este aumento reduce un poco el
par y la corriente de arranque.
Las corrientes de arranque varían entre 4 y 5 veces la corriente nominal en los tamaños mayores de 5 HP se sigue usando arranque a voltaje reducido. Los motores de clase B se prefieren sobre los de la clase A para tamaños mayores.
Las aplicaciones típicas comprenden las bombas centrífugas de impulsión, las
máquinas herramientas y los sopladores.
MOTORES DE INDUCCION DE JAULA DE ARDILLA CLASE C Estos motores tienen un rotor de doble jaula de ardilla, el cual desarrolla un
alto par de arranque y una menor corriente de arranque. Debido a su alto par de arranque, acelera rápidamente, sin embargo cuando se
emplea en grandes cargas, se limita la disipación térmica del motor por que la mayor parte de la corriente se concentra en el devanado superior.
En condiciones de arranque frecuente, el rotor tiene tendencia a sobre

calentarse se adecua mejor a grandes cargas repentinas pero de tipo de baja
inercia.
Las aplicaciones de os motores de clase C se limitan a condiciones en las que es difícil el arranque como en bombas y compresores de piston.
MOTORES DEINDUCCION DE JAULA DE ARDILLA CLASE D
Los motores comerciales de inducción de jaula de ardilla clase D se conocen también como de alto par y alta resistencia.
Las barras del rotor se fabrican en aleación de alta resistencia y se colocan en ranuras cercanas a la superficie o están embebidas en ranuras de pequeño
diámetro. La relación de resistencia a reactancia del rotor de arranque es mayor que en lo motores de las clases anteriores.
El motor está diseñado para servicio pesado de arranque, encuentra su mayor aplicación con cargas como cizallas o troqueles, que necesitan el alto par con
aplicación a carga repentina la regulación de velocidad en esta clase de motores es la peor.
MOTORES DE INDUCCIÓN DE JAULA DE ARDILLA DE CLASE F También conocidos como motores de doble jaula y bajo par. Están diseñados principalmente como motores de baja corriente, porque necesita la menor
corriente de arranque de todas las clases. Tiene una alta resistencia del rotor tanto en su devanado de arranque como en el de marcha y tiende a aumentar
la impedancia de arranque y de marcha, y a reducir la corriente de marcha y de arranque.
El rotor de clase F se diseñó para remplazar al motor de clase B. El motor de clase F produce pares de arranque aproximadamente 1.25 veces el par
nominal y bajas corrientes de arranque de 2 a 4 veces la nominal. Los motores de esta clase se fabrican de la capacidad de 25 hp para servicio directo de la línea. Debido a la resistencia del rotor relativamente alta de arranque y de
marcha, estos motores tienen menos regulación de voltaje de los de clase B, bajan capacidad de sobrecarga y en general de baja eficiencia de
funcionamiento. Sin embargo, cuando se arrancan con grandes cargas, las bajas de corrientes de arranque eliminan la necesidad de equipo para voltaje reducido, aún en los tamaños grandes.
CLASIFICACIÓN NEMA DE LOS MOTORES DE C. C.
MOTOR DE DISEÑO NEMA A Torque alto, deslizamiento nominal bajo y corriente de arranque alta. Es un
motor de inducción con rotor tipo jaula de ardilla, diseñado con características de torque y corriente de arranque que exceden los valores correspondientes al

diseño NEMA B, son usados para aplicaciones especiales donde se requiere un
torque máximo mayor que el normal, para satisfacer los requerimientos de sobrecargas de corta duración.
Estos motores también son aplicados a cargas que requieren deslizamientos nominales muy bajos y del orden del 1% o menos (velocidades casi
constantes).
MOTOR DE DISEÑO NEMA B
Torque normal, corriente de arranque normal y deslizamiento nominal normal. Son motores con rotor tipo jaula de ardilla diseñados con características de torque y corriente de arranque normales, así como un bajo deslizamiento de
carga de aproximadamente 4% como máximo. En general es el motor típico dentro del rango de 1 a 125 HP. El deslizamiento a plena carga es de
aproximadamente 3%. Este tipo de motor proporcionar un arranque y una aceleración suave para la
mayoría de las cargas y también puede resistir temporalmente picos elevados de carga sin detenerse.
MOTOR DE DISEÑO NEMA C Torque alto, deslizamiento nominal normal, corriente de arranque normal. Son motores de inducción con rotor de doble jaula de ardilla, que desarrollan un
alto torque de arranque y por ello son utilizados para cargas de arranque pesado. Estos motores tienen un deslizamiento nominal menor que el 5%.
MOTOR DE DISEÑO NEMA D Torque alto, alto deslizamiento nominal, baja corriente de arranque. Este motor combina un alto torque de arranque con un alto deslizamiento
nominal. Generalmente se presentan dos tipos de diseño, uno con deslizamiento nominal de 5 a 8% y otro con deslizamiento nominal de 8 a
13%. Cuando el deslizamiento nominal puede ser mayor del 13%, se les denomina motores de alto deslizamiento o muy alto deslizamiento (ULTRA HIGH SLIP).
El torque de arranque es generalmente de 2 a 3 veces el par nominal aunque
para aplicaciones especiales puede ser ms alto. Estos motores son recomendados para cargas cclicas y para cargas de corta duración con frecuentes arranques y paradas.
MOTORES DE DISEÑO NEMA F Torque de arranque bajo, corriente de arranque baja, bajo deslizamiento
nominal.
Son motores poco usados, destinándose a cargas con frecuentes arranques.
Pueden ser de altos torques y se utiliza en casos en los que es importante limitar la corriente de arranque.
DISEÑOS DEL MOTOR DE INDUCCIÓN DE LA CA, TIPOS El renombre mundial de los motores de inducción de la CA en usos numerosos ha llevado a algunos diseños estandarizados del motor. La concentración en un
número finito de tipos del motor también trae eficacias del diseño y de la fabricación, mientras que ayuda a alcanzar la tasación atractiva.
La asociación nacional de los fabricantes de material eléctrico, (nema, Washington, C.C.) ha desarrollado las especificaciones para los tipos supuestos
del diseño A de la nema, del motor de B, de C, y de D. Estos diseños se basan en estandarizar ciertas características del motor tales como comenzar la
corriente, se deslizan, y los puntos especificados del esfuerzo de torsión (véase abajo). Aquí está una breve reducción en tipos del motor de la nema:
El diseño A tiene normal el comenzar del esfuerzo de torsión (típicamente 150-170% de clasificado) y relativamente arriba el
comenzar de la corriente. El esfuerzo de torsión de la avería es el más alto de todos los tipos de la nema. Puede manejar las sobrecargas pesadas para un corto-duración. Resbalón el &=5%. Un uso típico es el
accionar de las máquinas de la inyección-moldeado. El diseño B es el tipo más numeroso de motor de inducción de la CA
vendido. Tiene normal el comenzar del esfuerzo de torsión, similar para diseñar A, pero las ofertas bajo que comienzan la corriente. El esfuerzo de torsión bloqueado del rotor es bastante bueno comenzar muchas
cargas encontradas en usos industriales. Resbalón el &=5%. La eficacia del motor y el factor de energía a carga plena son comparativamente
altos, contribuyendo al renombre del diseño. Los usos típicos incluyen las bombas, los ventiladores, y las máquinas de herramientas.
El diseño C tiene colmo el comenzar del esfuerzo de torsión (los dos diseños mayor que anteriores, dicen 200%), útil para conducir cargas disidentes pesadas. Estos motores se piensan para la operación cerca de
la velocidad completa sin grandes sobrecargas. Comenzar la corriente es bajo. Resbalón el &=5%.
El diseño D tiene colmo el comenzar del esfuerzo de torsión (lo más arriba posible de todos los tipos del motor de la nema). Comenzando velocidad actual y a carga plena sea bajo. Los altos valores del resbalón
(5-13%) hacen este motor conveniente para los usos con las cargas cambiantes y el sostenido acompañante cambian en velocidad del
motor, por ejemplo en la maquinaria con almacenaje de energía de la rueda volante. Varias subclases del diseño cubren la gama algo ancha del resbalón. Este tipo del motor generalmente se considera un artículo
de la “orden especial”.

El CE, el julio de 1998, P. 94 proporciona una ilustración de las características
comparativas de la esfuerzo de torsión-velocidad de estos motores. El diagrama también demuestra gráficamente los puntos siguientes de la esfuerzo
de torsión-velocidad importantes para las especificaciones del motor de inducción. El esfuerzo de torsión del Bloqueado-rotor (que comienza el esfuerzo de torsión) refiere al esfuerzo de torsión mínimo generado con el
rotor en descanso, y voltaje clasificado y frecuencia aplicados. El esfuerzo de torsión de la avería es esfuerzo de torsión máximo generado antes de una gota
precipitada en velocidad del motor ocurre pues se acerca la velocidad clasificada (en el voltaje y la frecuencia clasificados). El esfuerzo de torsión del Pull-up es el esfuerzo de torsión mínimo generado sobre la gama de velocidad
del motor del resto al punto de la velocidad donde se desarrolla el esfuerzo de torsión de la avería.
Los motores manufacturados para los mercados europeos e internacionales se ajustan a un diverso sistema de diseños y de especificaciones. La Comisión
electrotécnica internacional (IEC, Ginebra, Suiza) define estas características del diseño. Un tipo de motor de inducción del IEC se llama el diseño N. Este
tipo del motor tiene características de funcionamiento comparables a los motores del diseño A y de B de la nema.
Los motores de inducción de la CA se fabrican con una variedad de cubiertas protectoras para adaptarse a usos específicos. Además de los tipos del recinto
mencionados en “de nuevo el artículo de los fundamentos”, los motores de inducción están disponibles en inmóvil otras variedades de la cubierta; por
ejemplo deber químico, baldeo, y tipos a prueba de explosiones.
BIBLIOGRAFÍA:
www.infoplc.net/noticias/item/101363-sew-eurodrive-presenta-sus-nuevos-motores-sincronos-dr-
con-alta-eficiencia-energetica
http://energiesparen.sew-eurodrive.de/es/productos/effiziente-
energiesparmotoren/permanentmagnetmotor.html
http://www.treatment.xyleminc.com/sp/4650_lpsm.aspx
http://www.slideshare.net/federicoblanco2009/conexion-interna-de-motores
http://www.reidsource.com/PDF/Resources/Resource_Guide_Power_Transmission_1.pdf
http://s3.amazonaws.com/ppt-download/conexioninternademotores-090729150419-phpapp02.pdf
http://www.landbelectric.com/download-document/85-torque-characteristics-of-nema-abcd-e-
motors.html
http://www.controleng.com/article/272999-AC_Induction_Motor_Designs_Types.php
http://www.engineeringtoolbox.com/iec-duty-cucles-d_739.html
http://www.die.eis.uva.es/~daniel/docencia/te/motores_electricos.pdf
file:///C:/Users/Maria%20Jose/Desktop/Motor%20reluctancia%20conmutada/Electr%C3%B3nica%
20de%20potencia%20%20circuitos,%20dispositivos%20y%20aplicaciones%20-
%20Muhammad%20H.%20Rashid,%20Muhammad%20H.%20Rasid
%20Virgilio%20Gonz%C3%A1lez%20y%20Pozo%20Agust%C3%ADn%20Su%C3%A1rez%20Fe
rn%C3%A1ndez%20-%20Google%20Libros.htm
http://www.slideshare.net/tyzer/motor-de-reluctancia-conmutada
www.scielo.org.ve/pdf/uct/v10n37/art04




















