Luca Amerio Prof. Alberto Zasso Andrew Allsop ... - POLITesi
Upload
khangminh22Category
view
1download
0
POLITECNICO DI MILANOSchool of Industrial and Information Engineering
Master of Science in Automation and Control Engineering
Twin Rotor MIMO SystemDepartment of Electronics, Information and Bioengineering
Supervisor:
Prof. Lorenzo Mario FAGIANO
Co-Advisor:
Prof. Marcello FARINA
Master Thesis:
Prasath Deenadayalan
858601
Academic Year 2019/2020

Acknowledgments
Foremost, I would like to express my sincere gratitude to my advisor Prof. Lorenzo Mario FAGIANO for hiscontinuous support to my Master thesis, for his patience, motivation, enthusiasm, and immense knowledge. Hisguidance helped me in all the time of research and writing of this thesis. I could not have imagined having abetter advisor and mentor for my Master thesis.
Besides my advisor, I would like to thank my co-advisor: Prof. Marcello FARINA for his encouragement,insightful comments, and hard questions.
I would like to thank all my friends for their timely help and moral support, who all have by my side all thetime and pushed me towards the successful completion of this thesis work and MSc program.
Finally, I must express my very profound gratitude to my parents and to my brother for providing me withunfailing support and continuous encouragement throughout my years of study and through the process ofresearching and writing this thesis. This accomplishment would not have been possible without them. Thankyou.
II

Abstract
This thesis is concerned with design and modelling of a Twin Rotor Multiple Input – Multiple Output System(TRMS). The system has been built as an experimental setup in a laboratory for educational and researchpurposes. The system is comprised of mechanical and electrical components that work synchronously. Themain section of the system, that is the rotor assembly, is comprised of two Brushless motors each linked to apropeller, a main horizontal beam and a weight counter-balance beam. Pitch and Yaw angles formed by therotors are perpendicular to each other on the main beam. The rotors control the movement of the beam, andtheir effects are coupled due to the presence of drag torques.
The TRMS system was designed and built from scratch starting from a detailed design, selection of suitableparts, assembling the components and system calibration for proper functioning. Inputs and Outputs of thesystem are specified. The data acquisition from the system was achieved without any prevailing errors. Aproper functioning of the mechanical and electrical components was verified to be within the specifications.
III

Sommario
La tesi riguarda la progettazione e la modellizzazione di un sistema bi-rotore (TRMS). Il sistema costruito comeé un impianto sperimentale in un laboratorio per scopi didattici e di ricerca. Il sistema comprende componentimeccanici ed elettrici. La parte principale del sistema, ovvero il gruppo rotore, comprende due motori brushless,ciascuno collegato ad un’elica, una trave orizzontale principale e una trave di contrappeso di peso. Gli angolidi beccheggio e di imbardata formati dai rotori sono perpendicolari tra loro sulla trave principale. Le velocitàdei rotori influenzano il movimento del trave e i loro effetti sono accoppiati a causa della presenza di coppie diresistanza aerodinamica.
Il sistema TRMS è stato costruito da zero partendo da una progettazione dettagliata, selezione di partiadatte, assemblaggio dei componenti e calibrazione per il funzionamento. Vengono specificati sia gli ‘ingressi’sia le ‘uscite’ del sistema e sono state stabilite le modalità di trasmissione dei parametri. È stato verificato cheun corretto funzionamento dei componenti meccanici ed elettrici secondo le specifiche. Il modello è stato testatoper diversi valori di input con esito positivo.
IV

Contents
Title Page I
Acknowledgments II
Abstract III
Sommario IV
List of Tables VII
List of Figures IX
List of Acronyms X
Nomenclature XI
1 Introduction 11.1 Synopsis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 System Layout 32.1 System Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2 Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3 HMI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Mechanical Design 63.1 Top Section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.2 Middle Section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.3 Bottom Section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.4 Pitch Angle measurement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.5 Yaw Angle measurement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4 Mechanical Parts Selection 124.1 Top Section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.1.1 Horizontal beam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134.1.2 Centre Spindle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134.1.3 ‘L’ Clamp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.1.4 Top Section Gear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.2 Middle Section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
V

CONTENTS
4.2.1 Centre Shaft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154.3 Bottom Section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.3.1 Frame and base plate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164.3.2 Sleeve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164.3.3 Lock and Roller bearing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.3.4 Coupling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184.3.5 Bottom Section Gear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5 Electrical Parts 205.1 Slip Ring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5.1.1 Slip ring application in this system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215.1.2 Working mechanism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.2 Motors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235.2.1 Selection criteria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235.2.2 Electronic Speed Controller (ESC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
5.3 Rotors (propellers) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255.4 Encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5.4.1 Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275.5 Power Supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.5.1 Controller board supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285.5.2 Motor Supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.6 Wire connection Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
6 Data acquisition software 306.1 Matlab Simulink . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
6.1.1 Arduino programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
7 Conclusion 34
Bibliography 35
A Arduino Coding 36
VI

List of Tables
4.1 List of mechanical parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
5.1 Motor test data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235.2 Mechanical specifications of Encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275.3 Performance of Encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
VII

List of Figures
1.1 Twin Rotor MIMO System model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1 Full System Layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Mechanical system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3 Arduino Mega 2650 Controller board . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.1 Full system side View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.2 Full system Front View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.3 Top Section Top View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.4 Middle Section Front View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.5 Bottom Section Back View . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.6 Pitch angle measurement top view . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.7 Yaw angle measurement side view(rotated 90 degrees counter-clockwise) . . . . . . . . . . . . . . 11
4.1 Horizontal Beam Section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134.2 Centre spindle Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.3 L-Clamp Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.4 Top gear section model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154.5 Base plate with frame support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164.6 Sleeve model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.7 Lock System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.8 Mechanical coupling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184.9 Bottom gear section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5.1 Slip Ring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205.2 Slip Ring Internal Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215.3 Slipring contacts split up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225.4 Brushless DC Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245.5 Electronic Speed Controller ESC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245.6 Propellers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255.7 Encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.8 Pinout diagram of encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285.9 Power Supply Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.10 Wiring connection layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
6.1 Simulink support package selection window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
VIII

LIST OF FIGURES
6.2 : Full system modelling in simulink . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316.3 Hardware implementation configuration window . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326.4 Hardware implementation configuration window . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336.5 Arduino programming window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
IX

List of Acronyms
TRMS Twin Rotor MIMO system
MIMO Multi Input Multi Output
DOF Degrees Of Freedom
PWM Pulse Width Modulation
I/O Input or Output
HMI Human Machine Interface
PC Personal Computer
IDE Integrated Development Environment
USB Universal Serial Bus
GND Ground
ESC Electronic Speed Controller
VCC Voltage Collector to Collector
LCD Liquid Crystal Display
COM Communication
X

Nomenclature
Symbols Descriptions Units
θ Pitch angle rad
ψ Yaw angle rad
° degrees rad
XI

Chapter 1
Introduction
A helicopter is a major asset in the field of aviation. The main rotor is the most important part of a helicopterwhich produces the necessary thrust force. Creating the thrust force is the major task of the main rotor forthe ascend and descend maneuvering. Most helicopters have a single main rotor, but the torque created by itsaerodynamic drag must be counter-acted by a torque in the opposite direction to avoid the stability issues. Thiscounter-acting torque is provided by the tail rotor which is an integral component of a helicopter located at thetail part. The main advantage of a Helicopter is the vertical take-off capabilitiy that eliminate the need for arunway and also for its hovering capability. It can be maneuvered throughout 360° degrees. The aero-foil shapeof the rotor blades is the key component that creates the necessary thrust based on the pressure difference overthe aero-foil surface.
The swashplate is one of the most important components that are responsible for the pitch and yaw move-ments of the helicopter by varying the incidence angle of the rotor blades. The rotor is directly linked to the tailrotor and its actions are controlled by the pilot using a joystick to make the helicopter move forward, ascend,descend, and rotate.
A prerequisite of a helicopter is to have an effective control system. For this reason, a working laboratorymodel of a helicopter control system has to be built to save cost and time in experimenting numerous controltechniques on a helicopter. This serves as a purpose for building a fully operational Twin rotor MIMO system.
A Twin Rotor MIMO System (TRMS) is a laboratory setup that replicates the function of a twin-rotorhelicopter, see Figure 1.1. The setup considered in this thesis consists of two rotors, one for pitch and one foryaw angles, in the same way as we have in a helicopter.
The TRMS consists of a horizontal beam pivoted to the base of the system so that it can rotate freely onboth horizontal and vertical axes. At both ends of the beam there are rotors with propellers driven by brushlessDC motors. A counterbalance weight is fixed to the beam at the pivot point. One of the challenges in thesystem is measuring the state of the beam which is described by four process variables: horizontal and verticalangles at the pivot point, and two corresponding angular velocities. Other challenges include the cross-couplingeffects which leads to non-linearity in the system.
Unlike in a real helicopter, in TRMS the angle of attack of the rotor blades are fixed. The aerodynamicforces are varied based on the motor speeds controlled by ESC.
1

1.1. SYNOPSIS CHAPTER 1. INTRODUCTION
Figure 1.1: Twin Rotor MIMO System model
1.1 Synopsis
The remainder of the thesis consist of the following chapters,
Chapter 2: The overall TRMS layout is explained in this chapter. All the system modules, controller andHMI are explained in detail. The system modules include the mechanical system, controller and HMI.The interaction of data transfer between the modules were also explained.
Chapter 3: This chapter deals with the mechanical design of the TRMS system. Different section classificationsof the system are explained (Top, Middle and Bottom sections). Mechanical design behind both the pitchand yaw angle measurements are discussed.
Chapter 4: The mechanical components used in the overall design of the TRMS system as shown in theprevious chapter are explained in detail for each and every part.
Chapter 5: This chapter describes all the electrical components. Power system design and the connectivitybetween parts were also discussed.
Chapter 6: This chapter explains the Data acquisition and signal transfer performed in the TRMS systemduring its setup and operation.
Chapter 7: Conclusion and future goals are included in this chapter.
2

Chapter 2
System Layout
The TRMS system can be divided into three modules, depicted in the Figure 2.1 as follows.
Figure 2.1: Full System Layout
3

2.1. SYSTEM SETUP CHAPTER 2. SYSTEM LAYOUT
2.1 System Setup
Figure 2.1 shows the layout of the TRMS system described in the upcoming chapters.
Figure 2.2: Mechanical system
The mechanical setup resulting from the thesis is shown in Figure 2.2. The system is powered by the powersupply unit which is connected to the external power socket. The controller acts as a communicating mediumwhere every signal of input and output are transmitted.
2.2 Controller
The controller we use is an ARDUINO Board Model Mega 2650. This board will act as a brain that controlsthe entire system without which it is not possible to operate the TRMS. The whole set of our input signals arepassed to the system and the output signals are acquired from the system using this board through the inputand output terminals.
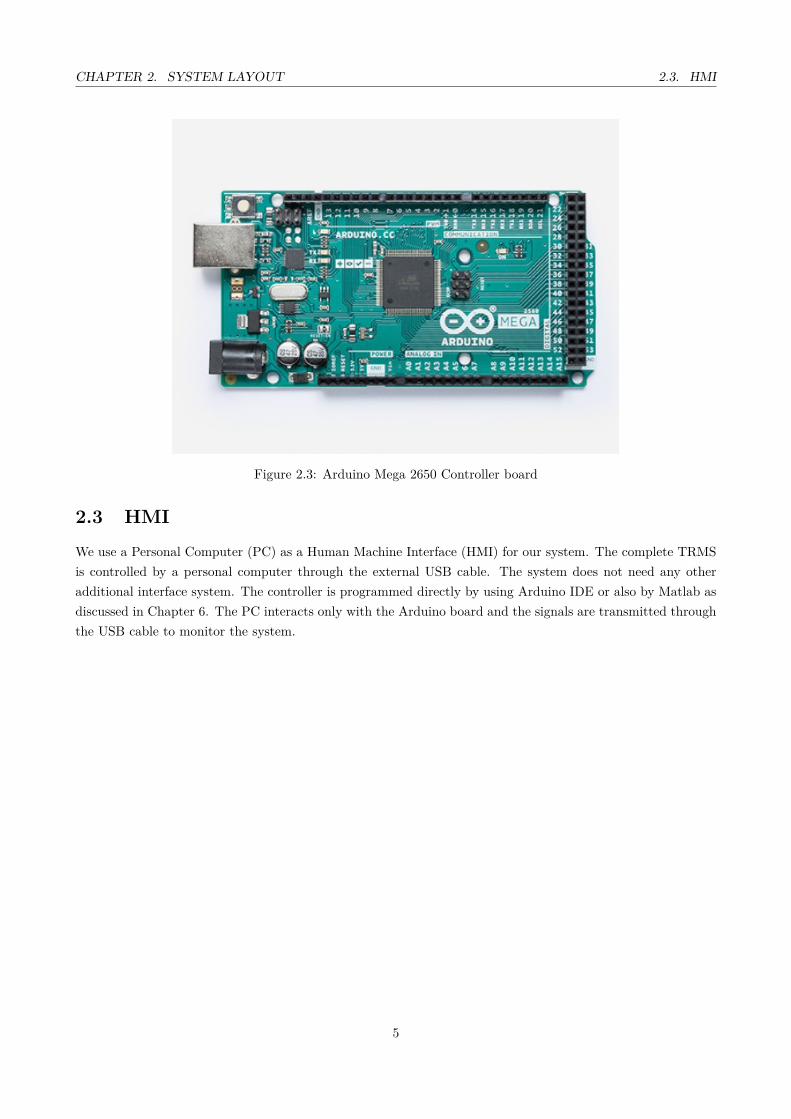
As seen in Figure 2.3, our board has 14 digital I/O ports among which 6 can be used to transmit PWMsignals while 6 I/O ports were utilized for analog inputs. The main advantage of using the Arduino boardis the open source hardware that can be used both as micro controller and microprocessor. The board isdesigned with digital and analog (I/O) input/output pins which can be interfaced to various external peripheraldevices, external boards and circuits. Arduino has its own IDE based on the language use to develop the sourcecode/project. In our case, we have used Embedded C language. The system does not need any more additionalcontroller except the Arduino board.
4
CHAPTER 2. SYSTEM LAYOUT 2.3. HMI
Figure 2.3: Arduino Mega 2650 Controller board
2.3 HMI
We use a Personal Computer (PC) as a Human Machine Interface (HMI) for our system. The complete TRMSis controlled by a personal computer through the external USB cable. The system does not need any otheradditional interface system. The controller is programmed directly by using Arduino IDE or also by Matlab asdiscussed in Chapter 6. The PC interacts only with the Arduino board and the signals are transmitted throughthe USB cable to monitor the system.
5

Chapter 3
Mechanical Design
This chapter is dedicated to the mechanical design of the system. The different parts of the mechanical systemare modelled and assembled in the SolidWorks (CAD) Software. The design choices regarding the pitch andyaw measurements are also discussed in this chapter. Our main goal is to have a design that enables us tomeasure the angles more precisely without any possible errors in the real time.
As illustrated in Figure 3.1 & Figure 3.2 the layout model and the parts are color coded for identificationpurposes. The system design is basically divided into three different sections for better understanding. Thesethree sections are denoted as top, middle and bottom sections.
Figure 3.1: Full system side View
6

CHAPTER 3. MECHANICAL DESIGN 3.1. TOP SECTION
Figure 3.2: Full system Front View
The details and specifications of the components of each section are discussed in detail on Chapter 4.
3.1 Top Section
The top section consists of the beam holding the rotors subject to pitch motion. This beam section also has aspindle, holding the beam in the center position allowing the motion of the pitch angle with the help of the “L-clamp”. A pair of ‘L-clamps’ is firmly fixed to the ‘Connection plate’.
As shown in Figure 3.3, this section handles 1DOF(Pitch). This section is placed on the rod so that the yawand pitch movements are linked together mechanically but independently of each other.
3.2 Middle Section
The center section serves as a link between the Top and Bottom section and consists of a hollow metallic pipelinked to the connection plate in the upper part through cross nuts, while in the bottom it passes through along sleeve with ball bearing inside that facilitates the rotational moment of 360° degrees, as discussed in detailin Section 4.2.
7

3.2. MIDDLE SECTION CHAPTER 3. MECHANICAL DESIGN
Figure 3.3: Top Section Top View
Figure 3.4: Middle Section Front View
8

CHAPTER 3. MECHANICAL DESIGN 3.3. BOTTOM SECTION
3.3 Bottom Section
The bottom provides stability to the structure. The center rod which comes out of the middle section is fitted toa coupled gear assembly so that the teeth of both gears align perfectly. This gear assembly connects the centralrod to the potentiometer through a coupling mechanism. The slip rings are held in position through ‘S-Clamps’which is attached to the base plate as visible in Figure 3.5. Details about this section will be discussed in theChapter 4 (see Section 4.3).
Figure 3.5: Bottom Section Back View
9

3.4. PITCH ANGLE MEASUREMENT CHAPTER 3. MECHANICAL DESIGN
3.4 Pitch Angle measurement
The main objective of this assembly is to measure the angles. The mechanical setup has been designed toextract the desired output with precision. The pitch angle is measured using the gear arrangement, as it canbe seen in the . The Figure 3.6 center gear attached to the spindle is perfectly fitted to the horizontal beam sothat when the beam experiences a pitch movement, it is transferred to the gear. This rotation is transferred tothe potentiometer through the small gear which in turn reads the pitch angle movement of the beam. In thisway the complete system was built to avoid any misalignments and errors during the angle measurement.
Figure 3.6: Pitch angle measurement top view
10
CHAPTER 3. MECHANICAL DESIGN 3.5. YAW ANGLE MEASUREMENT
3.5 Yaw Angle measurement
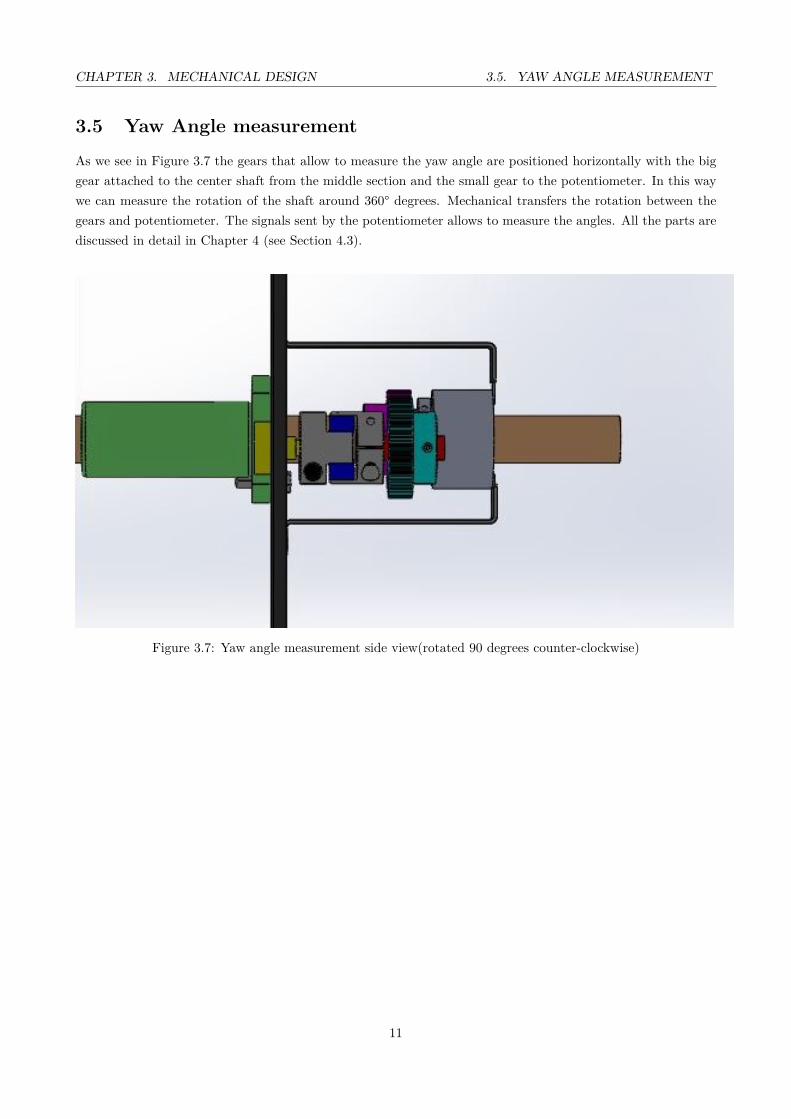
As we see in Figure 3.7 the gears that allow to measure the yaw angle are positioned horizontally with the biggear attached to the center shaft from the middle section and the small gear to the potentiometer. In this waywe can measure the rotation of the shaft around 360° degrees. Mechanical transfers the rotation between thegears and potentiometer. The signals sent by the potentiometer allows to measure the angles. All the parts arediscussed in detail in Chapter 4 (see Section 4.3).
Figure 3.7: Yaw angle measurement side view(rotated 90 degrees counter-clockwise)
11

Chapter 4
Mechanical Parts Selection
The system is composed of both mechanical and electrical components. As explained in Chapter 3 the mech-anisms allowing to measure pitch and yaw angles require many mechanical parts. This chapter explains theneeds, selection and use of each component for the proper functioning of the system. The Table 4.1 lists theparts, classified in three sections as discussed earlier in Chapter 3.
No. Part Name Section
4.1.1 Horizontal Beam
Top Section4.1.2 L clamp
4.1.3 Centre Spindle
4.1.4 Top section Gears
4.2 Centre Pipe Middle Section
4.3.1 Frame & Base Plate
Bottom Section
4.3.2 Long Sleeve with bearing
4.3.3 Lock and Roller bearing
4.3.4 Coupling
4.3.5 Bottom Section Gear
Table 4.1: List of mechanical parts
12

CHAPTER 4. MECHANICAL PARTS SELECTION 4.1. TOP SECTION
4.1 Top Section
4.1.1 Horizontal beam
The horizontal beam holding the rotors is made of aluminum using the extrusion method. Aluminum is selectedto reduce the component weight as much as possible. At the center of the horizontal beam a hole has been madeto balance the beam and keep it in the neutral position in non-operational condition. There is another beamattached to the main beam at the center, which acts as a counter weight to stabilize the beam in horizontalposition.
Figure 4.1: Horizontal Beam Section
4.1.2 Centre Spindle
The center spindle is passed through two ‘L-clamps’ that are attached to the ‘connection plate’ made in alu-minum. The spindle is locked in both the ends with nuts, so that only the rotational motion is allowed. Nolinear motion is allowed to avoid further vibration issues and stability problems. The horizontal beam is fittedwith the spindle so that they move together with proportional angles.
13

4.1. TOP SECTION CHAPTER 4. MECHANICAL PARTS SELECTION
Figure 4.2: Centre spindle Model
4.1.3 ‘L’ Clamp
The L-clamp is used to create an offset from the connection plate to effectively suspend the horizontal beamthrough the spindle which is fixed to the L-clamps. The L-clamps are attached to the connection plate by meansof bolts and nuts.
As we can see from Figure 4.3, the L-clamps holds the spindle in a locked position except for the rotation,thus constraining all other movements. The perfect fixing of this assembly helps avoiding the vibrations andobtaining proper measurements without any errors.
Figure 4.3: L-Clamp Model
14

CHAPTER 4. MECHANICAL PARTS SELECTION 4.2. MIDDLE SECTION
4.1.4 Top Section Gear
This set of coupled gears is placed in the top section of the system attached to the connection plate. Its purposeis to allow to measure the pitch angle. In fact, one side of the coupled gear is linked to the spindle, while theother end is connected to the encoder, which can measure the spindle movement. The gears are aligned in sucha way to perfectly measure the pitch angle (see-saw movement) of the horizontal beam. The gear mechanismcan be seen from Figure 4.4.
Figure 4.4: Top gear section model
4.2 Middle Section
4.2.1 Centre Shaft
The central shaft runs through the hole in the bottom base plate while, at the top, it is connected to the flange.The center shaft is fitted to the flange by means of screws. The rod at the center is held in position with the useof two sets of thin washers and a stopper, so they don’t move in linear motion. At the bottom part the washerand stopper assembly holds the pipe on both sides of the plate. And also the rod passes through the long sleevefixed to the bottom of plate, which is fixed inside with ball-bearing supporting the smooth rotational movementof the center rod.
15

4.3. BOTTOM SECTION CHAPTER 4. MECHANICAL PARTS SELECTION
4.3 Bottom Section
4.3.1 Frame and base plate
The base of the model consists of aluminum frames. The rectangular section of the frame stand is formedwith the linear aluminum extrusion method with groves inside for easy mounting by means of screws and nuts.Aluminum is chosen so as to avoid excess weight.
Figure 4.5: Base plate with frame support
On the top of the frame there is a stiffened thick plate of aluminum with holes drilled that are used forconnecting it to the aluminum frame.
The platform is rigid and stable to avoid any unnecessary vibrations. This is very important, since in thisway possible errors during measurements are avoided.
4.3.2 Sleeve
The Sleeve is attached to the base plate through which the center shaft passes in order to have the center shaftperfectly aligned in center. The interior part of the sleeve has a ball-bearing system which makes the shaftrotate with ease. The shaft is inserted through the hole present in the base plate. The main purpose of theflange is to hold the shaft in position to avoid unnecessary vibrations due to the pitch and yaw angles and alsohelps the system to turn around 360° degrees.
16

CHAPTER 4. MECHANICAL PARTS SELECTION 4.3. BOTTOM SECTION
Figure 4.6: Sleeve model
4.3.3 Lock and Roller bearing
The center shaft is attached with a lock system set by means of lock screws. This prevents the shaft from slidingdown from the desired position. There are two lock sets: one at the top and one at bottom of the sleeve.
The lock sets at the top and the bottom are accompanied by washers that enclose roller bearings, as visiblefrom Figure 4.7. This permits the rotation and prevents the frictional wear and tear of the lock system withthe sleeve.
(a) Roller Bearing (b) Lock
Figure 4.7: Lock System
17

4.3. BOTTOM SECTION CHAPTER 4. MECHANICAL PARTS SELECTION
4.3.4 Coupling
A mechanical coupling is used at the bottom section to bridge the gap between the encoder shaft and gear.
The coupling is connected with the encoder shaft at one side and, to the other side, it is attached to ananother small shaft where a gear is attached. This small shaft and gear have to be aligned perfectly with thegear present with the central shaft.
Figure 4.8: Mechanical coupling
18

CHAPTER 4. MECHANICAL PARTS SELECTION 4.3. BOTTOM SECTION
4.3.5 Bottom Section Gear
This set of gear is present in the bottom section. It is placed below the base plate to allow the measurement ofthe yaw angle. One side of this gear assembly is connected the central shaft while the other end is connected tothe encoder. The encoder is connected so that gears are perfectly aligned and in such a way that even a smallmovement is detected. As the center rod rotates, the angle measurement is converted into digital signals. Themovement to signal conversion by the gears can be seen from Figure 4.9.
Figure 4.9: Bottom gear section
19

Chapter 5
Electrical Parts
5.1 Slip Ring
The electrical slip ring is the major component which solves the problem of tangling the wires during the 360°rotation. Slip rings provide electricity to a continuously rotating part of other side of the system. They areused in electromechanical devices including rotating tables, and many surveillance systems like radars, medicalmachines like microscopes, renewable energy sources like wind turbines, automation equipment and so on.
Figure 5.1: Slip Ring
Electrical slip rings work by holding a sliding contact like brush against a conductor ring. One part, thebrush is stationary while the other part, the conductor ring rotates.
20

CHAPTER 5. ELECTRICAL PARTS 5.1. SLIP RING
Figure 5.2: Slip Ring Internal Structure
As depicted in Figure 5.2, each contact of the slip ring is well separated to have a dedicated contact line foreach signal.
5.1.1 Slip ring application in this system
The slip rings are needed in our system to avoid the tangling of the wires that carry power and data signals.This facilitates the pitch and yaw motions, while maintaining the connections with slip rings contacts.
Indeed, the reason of using an electrical slip rings is to transmit the signals between the rotational andstationary parts. As, in order to transfer power and data signals to other sides and also we don’t want our wiresto get tangled and damaged during the rotation of the central shaft.
5.1.2 Working mechanism
We use a slip ring in our system with a total of 12 contacts which can be used to transmit the signals fromstationary to the rotary side. The available contact points are effectively utilized based on the requirements.
Figure 5.3 shows the wires which are color coded for better understanding.
The Slip ring’s maximum capacity of 24A is equally divided between the 12 contacts available thus usinga 2A wire for each contact. For example, in our case we use 8A that has to be divided into two 4A for eachmotor.
21

5.1. SLIP RING CHAPTER 5. ELECTRICAL PARTS
Figure 5.3: Slipring contacts split up
22

CHAPTER 5. ELECTRICAL PARTS 5.2. MOTORS
5.2 Motors
Two motors are employed for replicating the twin rotor motion of the helicopter. In this system brushless motorsare used which have significantly higher efficiency, superior performance, and high resistance to mechanical wearwith respect to brushed motors. Other advantages include high torque-to-weight ratio and increased torque perwatt of power input for increased efficiency.
The two brushless motors perform the pitch and yaw motions based on the input power.
5.2.1 Selection criteria
The motors are selected as per the requirements and specifications provided so as to effectively replicate thetwin rotor system of the helicopter.
HK1612-KV:3200
Test Data
Prop Volts(V) Amps(A) Watts(W) Thrust(g) Thrust(oz) Efficiency(g/W) Efficiency(oz/W)
4*2.57 3.1 21.7 94 3.32 4.33 0.15
8 3.7 29.6 110 3.38 3.72 0.13
5*37 4.4 30.8 160 5.64 5.19 0.18
8 5.1 40.8 170 6.00 4.17 0.15
6*3 7 5.5 38.5 170 6.00 4.42 0.16
KV 3200 No Load Current 0.3A/7v
Lipo Cells 2S Internal Resistance 350mOhm
Max efficiency 81.1% Dimensions( Dia*L) 16mm*12mm
Current at Max eff 2-4.7A Shaft 1.5mm
Max Current(10S) 6A Weight 8.8g
Table 5.1: Motor test data
The motors are fitted to the horizontal beam and are equidistant from the center so that the beam alwaysremains balanced. The motors are fitted to the groove of the beam using the lock-and-nut mechanism. Eachmotor has three leads, connected to the output of ESC.
5.2.2 Electronic Speed Controller (ESC)
The brushless DC motors are controlled with use of Electronically Controlled Regulators (ESC). The powersupply is connected to the ESC from which the power is sent to the motor. The motor speed can be variedbased on the power supplied to the ESC.
23

5.2. MOTORS CHAPTER 5. ELECTRICAL PARTS
Figure 5.4: Brushless DC Motor
Figure 5.5: Electronic Speed Controller ESC
24

CHAPTER 5. ELECTRICAL PARTS 5.3. ROTORS (PROPELLERS)
Esc has four input terminals as depicted in the right part of Figure 5.5. They are the following:
• Terminal 1: The red line is connected to the positive pin 1 of the power supply.
• Terminal 2: The black line is connected to the negative pin 4 of the power supply.
• Terminal 3: The dark Yellow line is connected to the positive pin of PWM signal that is being sent fromthe Arduino board.
• Terminal 4: The brown line is connected to the ground of the PWM signal that is connected to the groundof the Arduino board.
The three output terminals are shown in the left part of Figure 5.4. They are connected to the three terminalsof the motor. The wires are soldered and sealed using thermoplastics.
5.3 Rotors (propellers)
The rotor blades or propellers are selected based on the required thrust and on the chosen motors. In Table5.1, the test data sheet indicates the propeller efficiency. The test data is provided by the manufacturer of themotor, when they test it on the test bench with different set of propellers.
Figure 5.6: Propellers
25

5.4. ENCODER CHAPTER 5. ELECTRICAL PARTS
Table 5.1 also gives the idea about the power supply in volts needed to get the required thrust. This inturn, is determinant to decide the size and pitch of the propeller. The propeller has a hole in the center, wherethe motor shaft must be inserted. A groove is also present at the end of the shaft for fixing the propellers inposition using lock nuts.
5.4 Encoder
The encoder is a sensor which basically converts the mechanical entities (i.e. angles or angular speeds) toelectrical entities for measurement purposes. Data obtained from the encoder are indeed used to determine thespeed, acceleration, direction and position of a mechanical system. There are many types of liner and rotationalencoders available in the market. Encoders are available in two main categories: absolute and incremental. Themajor advantage of this type of encoders are that they are inherently digital, which allows us to interface themeasily to modern control systems.
Figure 5.7: Encoder
26

CHAPTER 5. ELECTRICAL PARTS 5.4. ENCODER
5.4.1 Specifications
In our case the outputs of the bi-rotor system are the yaw and pitch angles. The angles of the mechanical partsare converted into digital signals with the help of an encoder. Table 5.2 shows the rotary-type encoder usedfor the system, it facilitates the measurement of angles of up to 360° degrees. Table 5.3 shows the mechanicalproperties of the selected encoder having specified accuracy of ±5° degrees.
MECHANICAL SPECIFICATIONS
Mechanical angle (MA) On request: stops360° continuous
342° ± 5°
Mounting type Servo Bushing Servo Bushing
Shaft guiding Sleeve bearings
Shaft Stainless steel
Option: flat or screw driver slot on shaft On request NA
Termination Turrets
Wiper Precious metal multi-finger contact
Starting torque (N.cm) ≤0.5
Torque on stops (N.cm) ≥20
Weight (g) Bushing 17 g ± 3 g Servo 12 g ± 3 g
Table 5.2: Mechanical specifications of Encoder
PERFORMANCE
Life (106 cycles) 5
Temperature range - 55 °C to + 125 °C
Climatic category 55/125/04
Speed rotation (RPM) 150
Sine vibration on 3 axes 15 g from 10 Hz to 2000 Hz
Mechanical shocks on 3 axes 50 g - 11 ms - half sine
Table 5.3: Performance of Encoder
27

5.5. POWER SUPPLY CHAPTER 5. ELECTRICAL PARTS
Encoders of this type are accurate, durable, and can be operated in wide range of temperatures.In this system we use two encoders: one at the top section and one at the middle section, discussed in
Chapter 3. The gear is fixed to the encoder shaft and is aligned perfectly to the rotating elements in order tomeasure the angles.
Figure 5.8: Pinout diagram of encoder
The encoders have three connections, which are as follows,
• Pin A is connected to the 5V power supply pin of the Arduino board.
• Pin B is the signal output pin that sends the electrical signal according to the angles formed, and isdirectly connected to the Arduino board.
• • GND is connected to the Arduino ground pin.
5.5 Power Supply
The system requires two types of power supply: one for the controller to provide power to the board and anotherto provide power to the motors.
5.5.1 Controller board supply
The Arduino board has to be externally powered in order to work. To do so, there are two options: one is to usethe external supply with an adapter, while another option is to use the external USB cable connected directlyto a PC. Through the USB cable we can provide power to the board. This also allows the data transmissionconnectivity to the board and vice versa.
28

CHAPTER 5. ELECTRICAL PARTS 5.6. WIRE CONNECTION DIAGRAM
5.5.2 Motor Supply
As discussed, another power supply is needed to run the motors. The selected power supply unit (NEWSTYLE12V 30A 360W DC) is fitted to the base plate using bolts and nuts. The unit supplies a maximum of 30 Ampspower, equally divided between two motors. The power supply unit is powered externally using the wall socket.
Figure 5.9: Power Supply Unit
5.6 Wire connection Diagram
The above-discussed parts must be connected in a proper way for the functioning of a system based on therequirements. Figure 5.9 depicts the wiring design of the objects connected using an online design platform.
Figure 5.10: Wiring connection layout
29

Chapter 6
Data acquisition software
The TRMS system developed in this thesis has to be verified for its operational capabilities. Indeed, there is aneed to have a robust method to effectively transfer data over different modules. Basically, the system can beoperated using two different methods which are as follows,
• Matlab Simulink
• Arduino programming
6.1 Matlab Simulink
The first approach is to use the Matlab software with a dedicated Simulink application package. The Matlabsoftware along with the Simulink application has to be installed in the PC. In particular, the ‘Simulink SupportPackage for Arduino Hardware’ must be set-up. This package allows us to use the custom-made library blockswhich replicate the actual board digitally. Figure 6.1 shows the choice of blocks available in the software.
Figure 6.2 below shows the Simulink application window connected with the MIMO system modelled inthis thesis. The pins from the Arduino boards are accessed form the PC. Pins 5,7 transmit the Pulse WidthModulation (PWM) signals from the board to the ESC using this interface. The blocks on the left side of thewindow are the given inputs selected from the standard constant blocks in Matlab. The input of the system isgiven in terms of percentage of duty cycle.
The duty cycle value of the block ranges from 0 to 255, where the value 0 corresponds to 0% duty cycle andthe maximum value of 255 corresponds to 100% duty cycle. As shown in Figure 6.2, the value of 127.5 signifies50% duty cycle. The right-side blocks refer to the output section, in which pin 2 and pin 7 are assigned withpitch and yaw measurements, respectively. Pin 2 and pin 7 are the data signals received from the encoder ,asexplained in the previousChapter 5 - 5.5.2. The output of each block is connected to the display with which wecan monitor the system in real time which also indicates the running time.
The output value obtained from each encoder is scaled to our requirements of the output in degrees. Theelectrical signals are converted to angles using the conversion factor ‘y’ in 6.2.
30

CHAPTER 6. DATA ACQUISITION SOFTWARE 6.1. MATLAB SIMULINK
Figure 6.1: Simulink support package selection window
Figure 6.2: : Full system modelling in simulink
31

6.1. MATLAB SIMULINK CHAPTER 6. DATA ACQUISITION SOFTWARE
Figure 6.3: Hardware implementation configuration window
function(y) = angle_conv_fcn (u) (6.1)
y = (u ∗ 340)/1023 (6.2)
As soon as the USB cable is connected to the board the system operation can be carried in real-time.TheFigure 6.4 shown below demonstrates the process of selecting the controller.
6.1.1 Arduino programming
The second approach of operating the system is through the Arduino programming interface using IDE codingplatform. Using this method, the inputs can be programmed directly on to the board thus eliminating the needof a PC. The requirements are programmed and stored on the onboard memory of the controller board usingthe USB cable connected to the PC which can be disconnected after this process. This stand-alone operationof the Arduino board can be monitored using a LCD display which acts as a HMI display port. The outputangle from the MIMO system is monitored in real time using the LCD display.
The above Figure 6.4 shows the IDE coding platform with which the coding is made. The above programallows to control the ESC and obtain the output signal form the encoder. In order to run the program, thecorrect COM port has to be selected. As soon as the uploading of program is completed, the system is set torun without influence of PC.
32

CHAPTER 6. DATA ACQUISITION SOFTWARE 6.1. MATLAB SIMULINK
Figure 6.4: Hardware implementation configuration window
Figure 6.5: Arduino programming window
33

Chapter 7
Conclusion
This thesis is concerned with the design and assembling of a TRMS, including both mechanical and electricalcomponents. The transmission of inputs and outputs to and from the MIMO system has been analyzed as well.The calibration of the complete system is made to ensure that the input to the system is effectively provided.
The angles formed by the mechanical components are the only necessary output of the system which waseffectively recorded by the electrical systems which in turn is used for the analysis.
In the future, the developed TRMS system can be used to study and experiment with various controltechniques. This laboratory setup replicates the actual control techniques of a twin-rotor helicopter which canbe utilized for various experimentation purposes. The key problem identified during the measurement of theangles was the instabilities encountered by the encoders. This problem can be rectified in the future by usingadvanced techniques available in the market. For example, the mechanical encoders can be replaced by digitalaccelerometers and gyroscopes which can be used for obtaining data with better precision avoiding the lossesincurred in using the mechanical system. Advanced nonlinear control techniques can be employed for controllingthe MIMO system for effectively handling cross-coupling effects. Overall, the TRMS setup developed will bethe base for many future developments and experimentation.
34

Bibliography
[1] T. Allam and S. M. Raju, “Design of pid controller for dc motor speed control using arduino microcon-troller,” 2016.
[2] F. Instruments, “Twin rotor mimo system control experiments. 33-949s,” Feedback Instruments Ltd., ParkRoad, Crowborough, East Sussex, TN6 2QR, UK, vol. 1, pp. 89–101, 2006.
[3] H. Christensen, N. Fogh, R. Hansen, M. Jensen, S. Larse, and A. Paramanathan, “Modelling and control ofa twin-rotor mimo system,” Report of Department of Control Engineering Institute of Electronic Systemsof Aalborg University, 2006.
[4] Vishay Siliconix, Tech. Rep. [Online]. Available: https://html.alldatasheet.com/html-pdf/253790/VISHAY/ECS/212/1/ECS.html
[5] [Online]. Available: https://www.moflon.com/images/mc330b.jpg
[6] A. Abdolkhani, A. P. Hu, G. A. Covic, and M. Moridnejad, “Through-hole contactless slipring systembased on rotating magnetic field for rotary applications,” IEEE Transactions on Industry Applications,vol. 50, no. 6, pp. 3644–3655, 2014.
[7] [Online]. Available: https://www.moflon.com/images/customized_slip_ring_1.jpg
[8] [Online]. Available: https://www.dynapar.com/products/technology_overview/
[9] [Online]. Available: https://www.rls.si/en/blog/what-is-encoder
[10] [Online]. Available: https://turnigy.rc-car.org/multistar-mini-12a-v2-esc.html
[11] [Online]. Available: https://www.tecnis.pt/compra/fonte-alimentacao-comutada-24vdc-400w-turbinado-proftc-5898
[12] [Online]. Available: https://store.arduino.cc/arduino-mega-2560-rev3
[13] M. T. Data, Tech. Rep. [Online]. Available: http://www.hobbyqueenitalia.com/prodotto-144029/HK-1612-Brushless-Outrunner-3200KV.aspx
35

Appendix A
Arduino Coding
Servo esc_signal_pitch;
Servo esc_signal_yaw;
void setup()
{
esc_signal_pitch.attach(5); // pin no of yaw esc
esc_signal_pitch.write(30); //ESC arm command. ESCs won’t start unless ≥30
esc_signal_yaw.attach(11); //pin no of pitch esc
esc_signal_yaw.write(30);
delay(3000); //ESC initialization delay.
}
void loop()
{
esc_signal_pitch.write(40);
esc_signal_yaw.write(40);//Vary this between 40-130 to change the speed of motor.
delay(15);
}
36
Copyright © 2022 FDOKUMEN