
Trajectory-Tracking Scheme in Lagrangian Form for Solving Linear Advection Problems: Interface...
16
Trajectory-Tracking Scheme in Lagrangian Form for Solving Linear Advection Problems: Interface Spatial Discretization LI DONG LASG, Institute of Atmospheric Physics, Chinese Academy of Sciences, Beijing, China BIN WANG LASG, Institute of Atmospheric Physics, Chinese Academy of Sciences, and Ministry of Education Key Laboratory for Earth System Modeling, and Center for Earth System Science, Tsinghua University, Beijing, China (Manuscript received 23 February 2012, in final form 25 July 2012) ABSTRACT A previous Lagrangian linear advection scheme (trajectory-tracking scheme) is modified to achieve local mass conservation in this paper, which is more favorable to climate modeling. The discretized tracer parcels are volumes with interfaces instead of centroids. In 2D problems, the parcels are polygons and the interfaces are described by polygonal edges with a finite number. Because polygons will deform under the background wind field, a curvature-guard algorithm (CGA) is devised to retain accurate represen- tation of the deformed interfaces among parcels. The tracer mass carried by parcels is mapped onto the regular latitude–longitude mesh by a first-order conservative remapping algorithm that can handle concave polygons. Several standard test cases have been carried out to show the effectiveness of the new scheme. 1. Introduction Advection is a fundamental process in climate mod- eling, and the number of transported tracers is steadily increasing to accommodate modern microphysics schemes and more advanced chemistry. Hence, the numerical scheme for solving it becomes a vital component of the general circulation models (e.g., atmospheric model, or AGCM); see Rood (1987) for a basic review. Despite the apparent simplicity of the continuous advection equation it remains a challenge to solve it numerically, and research on the numerical schemes is still active (Lauritzen et al. 2011, 185–187). The current main- stream schemes are based on the Eulerian form or semi- Lagrangian form, which discretize the continuous tracer on a fixed mesh, such as the two-step shape-preserving advection scheme (TSPAS; Yu 1994), flux-form semi- Lagrangian scheme (FFSL; Lin and Rood 1996), con- servative semi-Lagrangian multitracer transport scheme (CSLAM; Lauritzen et al. 2010), etc. Among desirable properties for the development of transport scheme are the following: 1) Numerical diffusion error: If a scheme is excessively diffusive, the large gradients or discontinuities in the tracer distribution will be smoothed out spuriously (Rood 1987; Stenke et al. 2008). 2) Filament preservation: Fine structures exist, in partic- ular, for long-lived stratospheric tracers, and have wide spatial scales (McKenna et al. 2002a,b; Wohltmann and Rex 2009). 3) Tracer correlations preservation: For chemistry and chemistry–climate applications, it is impor- tant that preexisting functional relations between tracers are not spuriously perturbed. Constant and linear relations that can be maintained by careful scheme design are preservation of uniform mixing ratios as well as linear relations between tracers (Lin and Rood 1996; Thuburn and McIntyre 1997). Preserving nonlinear relations is much more chal- lenging in traditional Eulerian and semi-Lagrangian discretizations (if not impossible); however, fully Lagrangian schemes, in the absence of numerical mixing processes, can maintain any relation between tracers. Corresponding author address: Li Dong, LASG, Institute of At- mospheric Physics, Chinese Academy of Sciences, 40 Hua Yan Li, Qi Jia Huo Zi, Chao Yang District, Beijing 100029, China. E-mail: [email protected] 324 MONTHLY WEATHER REVIEW VOLUME 141 DOI: 10.1175/MWR-D-12-00058.1 Ó 2013 American Meteorological Society
Transcript of Trajectory-Tracking Scheme in Lagrangian Form for Solving Linear Advection Problems: Interface...

Trajectory-Tracking Scheme in Lagrangian Form for Solving Linear AdvectionProblems: Interface Spatial Discretization
LI DONG
LASG, Institute of Atmospheric Physics, Chinese Academy of Sciences, Beijing, China
BIN WANG
LASG, Institute of Atmospheric Physics, Chinese Academy of Sciences, and Ministry of Education Key Laboratory
for Earth System Modeling, and Center for Earth System Science, Tsinghua University, Beijing, China
(Manuscript received 23 February 2012, in final form 25 July 2012)
ABSTRACT
A previous Lagrangian linear advection scheme (trajectory-tracking scheme) is modified to achieve
local mass conservation in this paper, which is more favorable to climate modeling. The discretized tracer
parcels are volumes with interfaces instead of centroids. In 2D problems, the parcels are polygons and
the interfaces are described by polygonal edges with a finite number. Because polygons will deform under
the background wind field, a curvature-guard algorithm (CGA) is devised to retain accurate represen-
tation of the deformed interfaces among parcels. The tracer mass carried by parcels is mapped onto the
regular latitude–longitude mesh by a first-order conservative remapping algorithm that can handle
concave polygons. Several standard test cases have been carried out to show the effectiveness of the
new scheme.
1. Introduction
Advection is a fundamental process in climate mod-
eling, and the number of transported tracers is steadily
increasing to accommodatemodernmicrophysics schemes
and more advanced chemistry. Hence, the numerical
scheme for solving it becomes a vital component of the
general circulation models (e.g., atmospheric model, or
AGCM); see Rood (1987) for a basic review. Despite
the apparent simplicity of the continuous advection
equation it remains a challenge to solve it numerically,
and research on the numerical schemes is still active
(Lauritzen et al. 2011, 185–187). The current main-
stream schemes are based on the Eulerian form or semi-
Lagrangian form, which discretize the continuous tracer
on a fixed mesh, such as the two-step shape-preserving
advection scheme (TSPAS; Yu 1994), flux-form semi-
Lagrangian scheme (FFSL; Lin and Rood 1996), con-
servative semi-Lagrangian multitracer transport scheme
(CSLAM; Lauritzen et al. 2010), etc.
Among desirable properties for the development of
transport scheme are the following:
1) Numerical diffusion error: If a scheme is excessively
diffusive, the large gradients or discontinuities in the
tracer distribution will be smoothed out spuriously
(Rood 1987; Stenke et al. 2008).
2) Filament preservation: Fine structures exist, in partic-
ular, for long-lived stratospheric tracers, and havewide
spatial scales (McKenna et al. 2002a,b; Wohltmann
and Rex 2009).
3) Tracer correlations preservation: For chemistry
and chemistry–climate applications, it is impor-
tant that preexisting functional relations between
tracers are not spuriously perturbed. Constant and
linear relations that can be maintained by careful
scheme design are preservation of uniform mixing
ratios as well as linear relations between tracers
(Lin and Rood 1996; Thuburn and McIntyre 1997).
Preserving nonlinear relations is much more chal-
lenging in traditional Eulerian and semi-Lagrangian
discretizations (if not impossible); however, fully
Lagrangian schemes, in the absence of numerical
mixing processes, can maintain any relation between
tracers.
Corresponding author address: Li Dong, LASG, Institute of At-
mospheric Physics, Chinese Academy of Sciences, 40 Hua Yan Li,
Qi Jia Huo Zi, Chao Yang District, Beijing 100029, China.
E-mail: [email protected]
324 MONTHLY WEATHER REV IEW VOLUME 141
DOI: 10.1175/MWR-D-12-00058.1
� 2013 American Meteorological Society

4) Multitracer efficiency: With the increase of tracer
number, the computational efficiency problem will
emerge. In semi-Lagrangian schemes that track
area and fully Lagrangian schemes, the movement
of Lagrangian parcels and computation of overlap
areas only has to be done once per time step and can
be reused for each additional tracer.
The motivation of the Lagrangian advection scheme
development by this study is to address these topics. The
first two topics are interconnected, since one scheme
with large numerical diffusion error will certainly not
preserve thin filament well. In the physical sense, the nu-
merical diffusion error is caused by the nonadaptivity
of the spatial discretization to the tracer distribution. In
the Eulerian schemes and semi-Lagrangian schemes, the
advection process is described as the movement of trac-
ers among mesh cells, and excessive mixing can occur
during the movement when the mesh is fixed. This makes
Eulerian schemes and semi-Lagrangian schemes able to
handle large deformational flow, but with the expense of
precise interface definition (i.e., numerical diffusion), as
stated inDonea et al. (2004). This error can be reduced by
increasing spatial resolution, but this approach also in-
creases the computational cost simultaneously. The spa-
tial discretization of Lagrangian schemes is based on
tracking a finite number of parcels moving with the flow.
The adaptivity to the tracer distribution is inherent in
such schemes. Several Lagrangian schemes have been
developed—for example, the GRANTOUR model
(Walton et al. 1988), Chemical Lagrangian Model of
the Stratosphere (CLaMS; McKenna et al. 2002a), At-
mospheric Tracer Transport In a Lagrangian model
(ATTILA; Reithmeier and Sausen 2002), and also the
trajectory-tracking scheme (noted as TTS-C, where ‘‘C’’
means centroid) developed by the authors (Dong and
Wang 2012). Stenke et al. (2008) compared the perfor-
mances of a semi-Lagrangian scheme and ATTILA,
where ATTILA showed positive effects on the reduc-
tion of cold bias in ECHAM4 GCM. All of these La-
grangian schemes adopt centroids as the form of parcels.
Each parcel is a centroid that has no definite spatial
boundary. InGRANTOUR,CLaMS, andATTILA, each
parcel carries constant mass, but in TTS-C, the tracer
density is carried. Thus, parcels in TTS-C behave like
sample points rather than particles in the aforemen-
tioned three schemes. Several test cases in Dong and
Wang (2012) showed the ability of TTS-C to significantly
reduce the numerical diffusion error, but there is a weak
point (i.e., the unphysical renormalization technique
adopted to conserve the total mass). This will hamper
the preservation of tracer correlation and also bring
some arbitrariness (Nair and Machenhauer 2002).
In this study, this unphysical renormalization tech-
nique is replaced. To conserve the mass locally and
physically, the tracer is discretized as parcel polygons in
2D problems with specific interfaces. These polygons do
not overlap and each carries some amount of tracers, so
the total mass is conserved locally and inherently. The
new TTS is denoted as TTS-I, where ‘‘I’’ stands for in-
terface that needs to be tracked. In the literature, there
are several numerical methods working on tracking in-
terfaces (Tryggvason et al. 2001; Aulisa et al. 2004).
Typical methods are volume of fluid method (VOF) and
level set method (LS). VOF was first presented in Hirt
and Nichols (1981). The main idea of it is to define a
function F that is the fraction of fluid within a cell, ad-
vect it by some numerical advection scheme, and re-
construct fluid interface from F (Noh and Woodward
1976; Rudman 1997; Ubbink and Issa 1999). The quan-
tity LS defines an implicit surface function u that is the
distance from the interface; u is advected as F in VOF.
For details of LS see Osher and Fedkiw (2003). In
Enright et al. (2002), Hieber and Koumoutsakos (2005),
and Enright et al. (2005), the authors pointed out that LS
has difficulties controlling the numerical diffusion, es-
pecially in areas of high curvature and long and thin
filamentary regions, and proposed a hybrid method that
combines LS and Lagrangian particles, called particle
level set method. Both of these two types of methods are
constructed under the Eulerian framework, and they
have rare applications in meteorology. Contrary to them,
TTS-I tracks the interface of each parcel in fully La-
grangian way, which is considered as a nontrivial task
(Hirt and Nichols 1981).
The major effort in TTS-I is to construct a set of al-
gorithms that will make the polygonal edges adapt to
the change of the interface curvature, and devise a first-
order conservative remapping algorithm that can handle
concave polygons. The details of TTS-I will be described
in section 2. Three numerical test cases are carried out to
verify TTS-I, and the results are shown in section 3. The
conclusions are cast in section 4.
2. Details of TTS-I
In the Lagrangian framework, there are two types of
spatial discretization. One is the parcel centroids, which
have no definite spatial boundary. The other one is the
parcels with interfaces, which cover the whole compu-
tational domain without gaps or overlaps. Several La-
grangian schemes have chosen the first type, such as
CLaMS and ATTILA, including TTS-C. The lack of con-
serving mass in a physical way will emerge when the
carried mass or density needs to be mapped onto the
backgroundmesh, since centroids haveno spatial boundary.
JANUARY 2013 DONG AND WANG 325

Therefore, the second type of discretization is selected
in this study, which is shown in Fig. 1. Because there is no
mass exchange on the interface, the tracer mass mi of
parcel i is constant, and so is the total tracer mass.
The advection equation in the Eulerian framework
can be written as
›p
›t1$ � pV5 0, (1)
where V is the velocity of the flow, and p is the tracer
density. In the Lagrangian framework, this partial dif-
ferential equation turns into an ordinary differential
equation system as
dX
dt5V and (2)
dp
dt52p$ �V , (3)
whereX is the coordinate of a parcel centroid. Assuming
the density is constant within a parcel (i.e., piecewise
constant), the density equation (3) will become
d
dt
ðA
i
pi da5 0,
pn11i An11
i 5pni A
ni 5mi ,
pn11i 5
mi
An11i
,
(4)
by integration with respect to the parcel area A, where
the subscript i indicates parcel i and the superscript n
indicates time step n. The tracer mixing ratio can be
recovered from u5p/r, where r is the air density that is
also gained by solving (1).
The continuous interface of a parcel is approximated
by edges (e.g., great-circle arcs on the sphere) of a poly-
gon in 2D problems. The vertices and edges are ordered
counterclockwise as in Fig. 1. Under the advection of the
background deformational flow, the location and shape
of polygons will both change. So there is a question: could
the curvature changes of the real parcel interfaces be
captured in the deformational flow?When the number of
polygonal edges is fixed, the crossing of the polygonal
edges will be inevitable in some polygons (denoted as
edge crossing). As depicted in the left column of Fig. 2,
the poor approximation with only four edges to the real
interface will eventually cause spurious edge crossing, but
when the number of edges is sufficient as shown in the
right column of Fig. 2, this problemwill be avoided. Thus,
the focus of TTS-I is to construct a set of algorithms
to guard the curvature of the parcel interfaces, called
curvature-guard algorithm (CGA). Other issues relating
to the Lagrangian schemes can be found in Dong and
Wang (2012) (e.g., trajectory calculations by fourth-order
Runge–Kutta method and Pole problems on the sphere).
Some calculations of spherical geometry related to TTS-I
are listed in appendixes for complementary purposes.
It isworth noting that in the conservative (cell integrated)
semi-Lagrangian schemes (e.g., CSLAM), there is a one-
to-one correspondence between fixed Eulerian mesh
cells and upstreamLagrangian departure cell (Lauritzen
et al. 2010), but in TTS-I this is not the case, which is the
major difference between them.
CGA includes several subalgorithms that will be de-
scribed below in sections 2a–d. After the advection of
parcel polygons, the mass carried by parcels will be re-
mapped onto the background mesh for the future in-
corporation with a real AGCMas in Stenke et al. (2008),
here is a regular latitude–longitude mesh (or RLL) in
this study. This procedure is accomplished by a first-
order conservative remapping described in section 2e.
The workflow of TTS-I is shown in Fig. 3. The polygon-
splitting subalgorithms are not included in this work,
and will be covered in the future.
a. Edge-splitting algorithm
As shown in Fig. 2, the right column shows the polygon
that is assumed to be themore accurate approximation of
the real interface, so the edge crossing can be avoided by
FIG. 1. Schema of a parcel polygon. The vertices and edges of the polygon are ordered coun-
terclockwise. Under the advection by a deformational flow, the location and shape of the polygon
will be changed, so are the area Ai and density rti , but the carried tracer mass mi is kept constant.
326 MONTHLY WEATHER REV IEW VOLUME 141

inserting more edges. Then the key question is when and
where should more edges be inserted. The basic idea is
depicted in Fig. 4a. EdgeAB is equipped with a test point
O, which is initially at the middle of the edge, and ad-
vected with A and B. Because of the deformation of the
flow,:AOB (see appendix B for the calculation details)
will deviate from 1808. After it exceeds some threshold,
edge AB will be split into two new edges AO and OB.
Obviously, this threshold is a key parameter to control
the accuracy of the approximation of the real interfaces.
During the experiments, this threshold is set as a function
of the edge length to make longer edge more easily split.
The following function, which is modified from a smooth-
ing function in Liu and Liu (2003), is chosen:
a(l)5
8>><>>:
A0 l#L0 ,
(A12A0)(42 3t)t31A0 L0, l#L1 ,
A1 l.L1 ,
(5)
whereA0 andA1 are the angle threshold bounds,L0 and
L1 are the edge length range, and t5 (l2L0)/(L1 2L0).
In Fig. 4b, two such functions with different parameters
are stitched together to gain more control on the length
scales of edges.
b. Edge-merging algorithm
With the insertion of more edges, the computational
complexity will increase significantly. On the other hand,
not all the curvature change is genuine, because of the
temporal discretization error and the discrete velocity
field. Thus, the merging of edges needs to be included
to remove the neighboring edges that are nearly straight
or short in some sense. The angle threshold that con-
trols when to merge two neighboring edges is the same
as the one for edge splitting but with a relax factor R
[i.e., multiply (5) by R] to avoid merging the newly split
edges. This relax factor has the same form of (5) boun-
ded by R0 and R1. The edge merging can be considered
as the inversion of edge splitting and also a filtering
procedure. The similar idea is found in Dritschel (1988)
(contour surgery) with the name of ‘‘cutoff scale,’’ which
is used to remove the vorticity features thinner than
that scale.
c. Vertex–edge-approaching detection algorithm
Under the advection of the deforming flow, the rela-
tive position of vertices will change largely. Especially as
the filaments, where edges are very close, any splitting or
merging of edges may affect the calculation by causing
FIG. 2. Schema of edge crossing. (left) The result without CGA and (right) with CGA.
JANUARY 2013 DONG AND WANG 327

potential edge crossings. Therefore, the orientation and
the projection of the vertex on the edge are calculated
(see appendixes A and D for calculation details) and re-
corded to provide the following potential crossing
detection algorithm the basic geometric information.
Figure 5 shows the relative movement of a vertex to
another edge, including its projection on that edge. Ad-
ditionally, one vertex may have projections on several
edges, so each vertex will have a list of those edges. On
the other hand, each edge will also have a list of vertices
that have projection on it. In the algorithm, the vertex
will be paired with the edge on which it has projection.
Each polygon will be detected to update these orienta-
tions and projections after both edge-splitting and edge-
merging operations as shown in Fig. 3.
d. Potential crossing detection algorithm
Since the edge-splitting and edge-merging operations
will change the geometric structure of the polygon to
capture the curvature change and reduce the computa-
tional complexity, respectively, the edge crossing may
be caused in the regions with high density of vertices and
edges. Thus, some detections of the potential edge crossing
should be conducted. The possible edge-crossing pat-
terns are listed in Fig. 6.
For edge splitting, a new vertex will be inserted.When
edges are very close, itmay cross some edges. So for those
paired vertices of the old edge, the orientation of them to
the two new edges will be calculated and compared with
the old one. If those orientations are not consistent as
shown in Fig. 6a1, the edges linked with the crossing
paired vertex will have intersection with the new edges.
Figure 6a2 indicates that the paired edges of the old edge’s
end vertices may have intersection too. Test points of
edgesmay also cross as shown in Fig. 6a3. The crossing test
points will be reset to the middle point of their host edges
to avoid potential problems. For edge merging, the effects
of removing the common vertex of two neighboring
edges will be detected; see Fig. 6b. In detail, check the
potential wrong orientation and intersection of the
paired vertices of the two old edges relative to the new
edge as in the edge-splitting cases. If any of the patterns
happen, the edge-splitting or edge-merging operation
will not be conducted.
FIG. 3. Workflow of TTS-I. FIG. 4. Schema of edge splitting. (a) An edge-splitting operation
and (b) an angle threshold function to judge whether to split an
edge.
FIG. 5. Schema of the approaching detection algorithm. The
orientation and projection of the vertex C on the edge AB are
calculated for detecting approaching events.
328 MONTHLY WEATHER REV IEW VOLUME 141

e. First-order conservative remapping
Conservative remapping is an important topic for cou-
pling different components in coupled climate system
modeling. Jones (1999) proposed a general first- and
second-order algorithm called the Spherical Coordinate
Remapping and Interpolation Package (SCRIP). SCRIP
has large geometric error when the mesh cell sides are
not straight lines in latitude–longitude space, which was
noted in Lauritzen and Nair (2008), and the cell must be
convex. Lauritzen and Nair (2008) developed a Cascade
Remapping between Spherical Grids (CaRS), which is
based on cascade interpolation (Purser and Leslie 1991).
CaRS splits the two-dimensional interpolation into two
one-dimensional interpolations. Ullrich et al. (2009)
constructed a Geometrically Exact Conservative Re-
mapping (GECoRe) between RLL and cubed–sphere
grids, which is designed to reduce the geometric error in
SCRIP and CaRS. GECoRe uses fully two-dimensional
high-order remapping and converts area integrals to line
integrals.
Conservative remapping is also an essential part in the
conservative semi-Lagrangian schemes, such as incre-
mental remapping scheme (Dukowicz and Baumgardner
2000) and CSLAM (Lauritzen et al. 2010). These
schemes track Lagrangian cells forward or backward,
and remap the tracers to or from deformed mesh cells.
Because the Lagrangian cells start from a regular cell
at each time step, the deformation is not that large,
whereas the parcel polygons in TTS-I will be tracked all
the time, and so the remapping in TTS-I will be more
complicated.
In TTS-I, the polygonal edges are great-circle arcs,1
and the polygons will turn to be arbitrarily shaped (e.g.,
concave) under the advection of deformational flow, so
SCRIP cannot be used. The tracer density is assumed
constant within a polygon, so the remapping from poly-
gons to mesh cells will be first order. Higher-order re-
mapping is not trivial, because the shape of polygon is
arbitrary. But it is worth noting that because of the La-
grangian nature of TTS-I, the results are not diffusive as
in other first-order schemes. Thus the basic idea of first-
order conservative remapping in SCRIP (i.e., finding the
overlaps between different mesh cells) is applied in this
study, but with the handling of concave polygons, which
will be described in details below. In the future, the re-
versed remapping (i.e., frommesh cells to parcel polygons)
FIG. 6. Schemas of the potential crossing patterns. (a) Is for
splitting edge AB and (b) is for merging edges AB and BC.
FIG. 7. Schema for the remapping of a concave polygon. The
filled circles are the calculated intersections between polygonal
edges and grid lines. The numbers in the cells compose the mark
matrix C with a meaning of 0 for no overlap, 1 for crossing, 2 for
fully covering, and 21 also for no overlap in this case. The eight
ellipses indicate the searching order for a cell.
1 High-order edge approximations are considered in Ullrich
et al. (2012).
JANUARY 2013 DONG AND WANG 329
will be also needed to map tendencies from the physical
parameterization suite back to the tracer grid. For this,
higher-order mapping such as GECoRe technology
could be used.
After the advection, the location of each vertex has
been calculated (i.e., the enclosing cell of the vertex).
For each polygon, the intersections between its edges
and the RLL cell sides will be calculated along the
edges; see the filled circles in Fig. 7. The calculation of
the intersection is shown in appendix E. During this
calculation, the indices of the crossed cells will be re-
corded for the following processes. To find out the cells
that may be fully covered by the polygon, a mask
matrix C will be constructed. Its shape is the same as
the bounding box of the polygon. Firstly, all the elements
are set to 0, indicating no overlap. Secondly, by using the
recorded indices of the crossed cells, set the elements to 1
corresponding to the cells that are crossed by the edges,
and to 21 corresponding to the cells that may be fully
covered by the polygon. Then for each 21 element, it-
eratively check the surrounding elements in the order as
shown in Fig. 7. There are three searching paths in Fig. 7.
The cells along one of these three paths are determined
to be fully covered cells, because no 0 cell is encoun-
tered, and the masks of them are set to 2. The path may
fork during the searching, and the results may be dif-
ferent (e.g., one branch gives 2, and the other one gives
0). So when this happens, reset the branches with 2 to 0.
The more accurate way to judge whether a 21 cell is
covered by a polygon or not is to judge whether the cell
center is in that polygon by using ray-casting algorithm
(refer to appendix F for calculation details), but this is
more expensive. To ensure the correctness of C, this ac-
curate way is only chosen at the end of the search path.
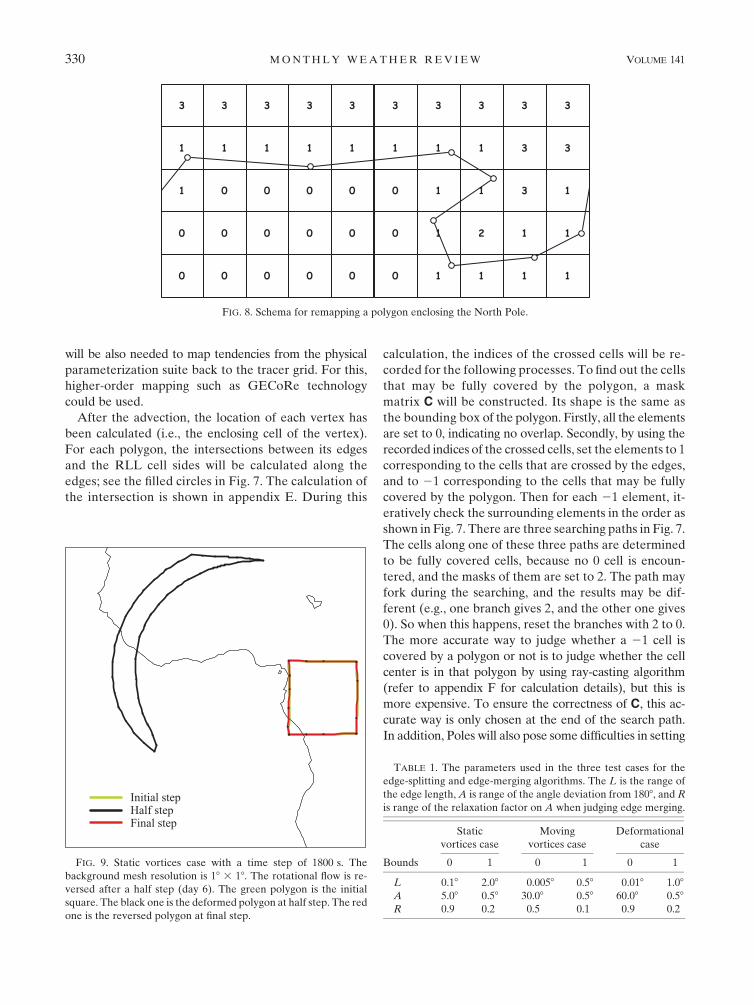
In addition, Poles will also pose some difficulties in setting
FIG. 8. Schema for remapping a polygon enclosing the North Pole.
FIG. 9. Static vortices case with a time step of 1800 s. The
background mesh resolution is 18 3 18. The rotational flow is re-
versed after a half step (day 6). The green polygon is the initial
square. The black one is the deformed polygon at half step. The red
one is the reversed polygon at final step.
TABLE 1. The parameters used in the three test cases for the
edge-splitting and edge-merging algorithms. The L is the range of
the edge length,A is range of the angle deviation from 1808, and R
is range of the relaxation factor on A when judging edge merging.
Static
vortices case
Moving
vortices case
Deformational
case
Bounds 0 1 0 1 0 1
L 0.18 2.08 0.0058 0.58 0.018 1.08A 5.08 0.58 30.08 0.58 60.08 0.58R 0.9 0.2 0.5 0.1 0.9 0.2
330 MONTHLY WEATHER REV IEW VOLUME 141

C. When a polygon encloses a Pole (judged by ray-
casting algorithm), C will span the whole zonal region
as shown in Fig. 8. The cells between the edges and the
Pole will be set to 3.
With the intersections and C, the overlap area be-
tween the polygons and the RLL cells can be calculated.
The tracer mass of the polygon remapped onto the mesh
is calculated as
FIG. 10. Tracer density inmoving vortices case. The backgroundmesh resolution is 18 3 18 and the polygon number
is 40 962. (a) The initial condition is a contour level set varying from 0.5 to 1.5. The solutions at the (b) half and (c) full
revolution with time step 1800 s and vortices crossing Poles. (d) The relative error is depicted at the full revolution.
(e) The solution at full revolution with time step 900 s and vortices crossing Poles. (f) The solution at full revolution
with time step 1800 s and vortices along equator.
JANUARY 2013 DONG AND WANG 331

mi,j 5 �k2S
i,j
Aki,j
Ak
mk , (6)
whereAk is the area of polygon k, andAki,j is the overlap
area between cell (i, j) and polygon k. Set Si,j is the
polygons that overlap with the cell (i, j). The inverse
remapping can use the overlap area too as
mk 5 �i,j2S
k
Aki,j
Ai,j
mi,j , (7)
where Ai,j is the area of cell (i, j), and set Sk is the cells
that overlap with polygon k. Theoretically, the overlap
areas have the following relations with the polygon and
cell area:
Ak 5 �i,j2S
k
Aki,j, and
Ai,j 5 �k2S
i,j
Aki,j ,
but because of the floating-point error of the numerical
computing, the above equations are approximated
within the order of 10213. So Ak and Ai,j in (6) and (7)
should be replaced by the right-hand side in the above
equations to ensure the sum of the area weights will be
exactly 1 (i.e., partition of unity).
3. Numerical results
In the following sections, the test results of TTS-I are
presented on the sphere with RLL background mesh.
Since deformational flow is more challenging in TTS-I,
we choose two cases relating to vortex and one case that
are highly deformational.
FIG. 11. Normalized errors of moving vortices case with polygon
number 40 962 and time step 1800 s.
TABLE 2. The spatial resolutions and time steps chosen for evaluating
the convergence rate of TTS-I.
Mesh resolution Polygon No. Time step (s)
38 5000 5/150
1.58 10 000 5/300
0.758 20 000 5/600
0.3758 40 000 5/1200
FIG. 12. Mixing ratio in deformational test case with Gaussian
hills initial condition. Time step Dt5 5/600 s. The backgroundmesh
is 0.758 3 0.758. (a) The initial condition. (b) The results at half time
step (step 300) with 20 000 polygons. (c) At the final time step.
332 MONTHLY WEATHER REV IEW VOLUME 141

a. Static vortices test case
In Nair and Jablonowski (2008), a moving vortices test
case has been established that has been widely adopted
(Putman and Lin 2007; Flyer and Lehto 2010; Lauritzen
et al. 2010). To demonstrate the effects of the splitting
and merging of edges on a simple but clear platform, the
moving vortices are modified to be stationary, and the
moving case will be used next. The two vortices are lo-
cated at (08, 08) and (1808, 08), and an initial square
polygon (the green one) is placed at (158, 08) with four
vertices and edge length 108 as shown in Fig. 9. The
background mesh is an equidistant regular latitude–
longitude mesh with resolution 18 3 18. The parameters
in the edge-splitting and edge-merging algorithms are
listed in Table 1. It is worth noting that these parameters
for CGA are adjustable. There may be more objective
and optimal ways to set them, and this needs further
research. When the time advances with the time step
1800 s, more edges are inserted as expected so that the
curved interface of the parcel is captured by the edge-
splitting algorithm; see the black deformed polygon at
half step in Fig. 9. To clearly show the effect of the edge-
merging algorithm, the flow is reversed after some time
(6 days in this case), and the polygon will be restored to
its original position. Because of the discretization error,
TTS-I exhibits some small error [i.e., the final polygon
(the red one) does not coincide with the initial polygon
exactly, and the vertex number is more than four]. The
remapping procedure is not included in this test in order
to focus on the interface calculation part of TTS-I.
Overall, CGA can capture the changes of the parcel in-
terface under the deformational flow.
b. Moving vortices test case
In this test, the moving vortices test case (Nair and
Jablonowski 2008) is adopted as in Dong and Wang
(2012) to verify the performance of TTS-I near the
vortex, where the parcel polygons are stirred to form very
thin filaments. Some other schemes with the adaptive
mesh refinement (AMR; see Behrens 2006, Flyer and
Lehto 2010, and also Nair and Jablonowski 2008) show
promising results by adding more resolution near the
two vortices under the Eulerian framework. The basic
setup of this test case is omitted here to avoid duplicates
(a5 908); for details refer toNair and Jablonowski (2008)
and Dong and Wang (2012). The initial polygon distri-
bution of TTS-I is set by the geodesic or icosahedral grids
for uniform coverage of the sphere with 40 962 poly-
gons. The key parameters are tabulated in Table 1. The
results of tracer density at half (6 days) and full (12 days)
revolution are depicted in Figs. 10b and c, respectively,
with Dt 5 1800 s. To remove the bias caused by the
polygon distribution, the true solution is evaluated at
the background mesh, remapped onto the polygons and
then remapped back again at each step. The difference
between the true solution and TTS-I at day 12 is shown in
Fig. 10d and the normalized errors are shown in Fig. 11.
Compared with the results in Dong and Wang (2012)
and the references there, the simulated filaments at the
vortex center are poorer than the ones in TTS-C. This is
caused by the Poles, where a polar stereographic (PS)
plane is introduced for velocity interpolation and tra-
jectory calculation. In TTS-I, the tracer density is affected
by the polygon area directly—see (4)—and the area is
affected by the vertex trajectories. Thus, the transition
between latitude–longitude space and PS plane when
calculating trajectories will cause some unphysical distur-
bance, whichwill have adverse effects on the calculation of
polygon area. Whereas in TTS-C, the density is calculated
by solving (3) and is affected by velocity divergence.When
decreasing the time step to 900 s in the original test setup
(Fig. 10e) or making the vortices rotate along the equator
by setting a 5 08 (Fig. 10f), the results of TTS-I become
FIG. 13. Convergence plots for (a) l2 and (b) l‘, computed with Gaussian hills initial conditions by TTS-I. The CFL
is chosen as about 2.0, and the spatial resolutions and time steps are listed in Table 2. The upper and lower heavy lines
on each plot correspond to the slopes of first- and second-order convergence rates, respectively.
JANUARY 2013 DONG AND WANG 333
better. Nevertheless, TTS-I conserves the mass physically.
In future research, other meshes without Pole problems
could be used to improve the accuracy of TTS-I.
c. Deformational test case
There is an undertaking effort to construct a more
standard test case suite for comparing transport or ad-
vection schemes (refer to Lauritzen et al. 2012)—not only
testing single tracer, but also diagnosing the preservation
of the predefined correlations amongmultiple tracers. The
basic test cases are proposed in Nair and Lauritzen (2010)
as a class of deformational test cases to provide more re-
alistic flow. The chosen test flow is the case 4 of Nair and
Lauritzen (2010) with three types of initial conditions in
this study. The background air and tracer are both ad-
vected, and the tracermixing ratio is calculated asu5p/r.
The convergence rate of TTS-I is studied by using an
initial condition of Gaussian hills. The resolution of RLL
mesh, the number of polygons, and the time steps are
tabulated in Table 2 with CFL (in the sense of RLL
mesh) about 2.0. The results of 20 000 polygons are
shown in Fig. 12, and the convergence rate is plotted in
Fig. 13. From the figure, it can be seen that TTS-I has
first-order convergence rate. Although the rate is rel-
atively low compared with other high-order schemes,
the performance of TTS-I is not low as other first-order
schemes, especially for the discontinuous tracers as
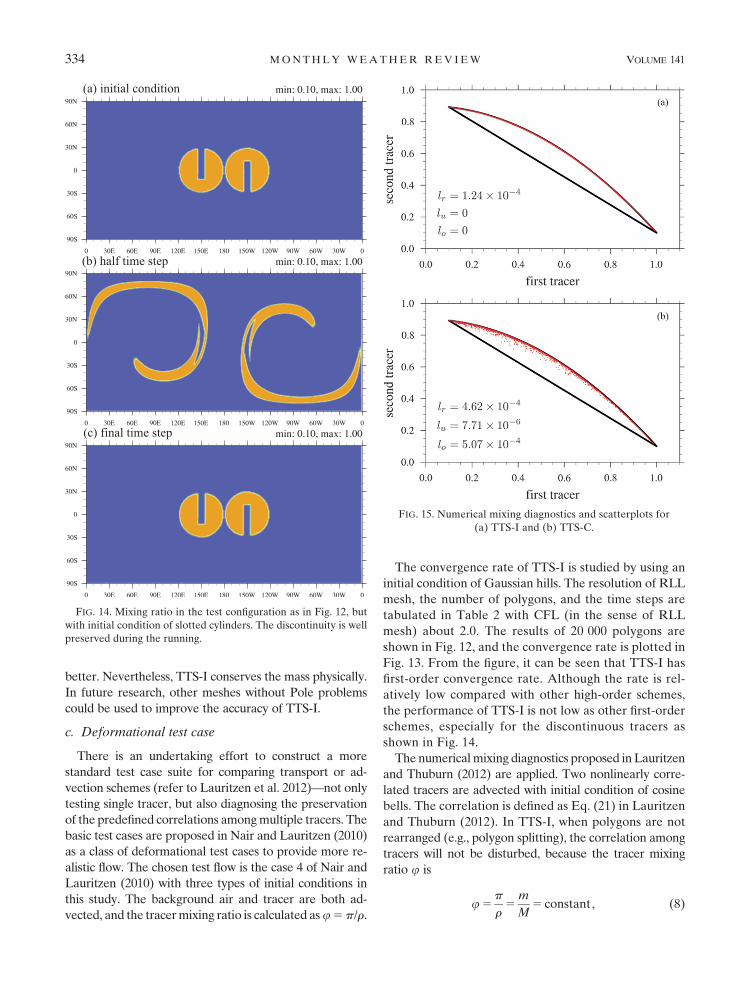
shown in Fig. 14.
The numericalmixing diagnostics proposed inLauritzen
and Thuburn (2012) are applied. Two nonlinearly corre-
lated tracers are advected with initial condition of cosine
bells. The correlation is defined as Eq. (21) in Lauritzen
and Thuburn (2012). In TTS-I, when polygons are not
rearranged (e.g., polygon splitting), the correlation among
tracers will not be disturbed, because the tracer mixing
ratio u is
u5p
r5
m
M5 constant, (8)
FIG. 14. Mixing ratio in the test configuration as in Fig. 12, but
with initial condition of slotted cylinders. The discontinuity is well
preserved during the running.
FIG. 15. Numerical mixing diagnostics and scatterplots for
(a) TTS-I and (b) TTS-C.
334 MONTHLY WEATHER REV IEW VOLUME 141

where m is the tracer mass in the polygon, M is the air
mass. Whereas in TTS-C, this correlation will not be
preserved. Figure 15 shows the numerical mixing di-
agnostics (lr, lu, lo) and scatterplots at half time step. The
polygon number in TTS-I is 40 962, and the centroid
number in TTS-C is 115 200. Themesh resolution is 18 318 and the time step is 5/600 in both of them. It is obvious
that TTS-I preserves the correlation accurately with
only small mixing caused by the remapping procedure.
The highlight of TTS-C–I is the well preserving of
discontinuity, so the slotted cylinder’s initial condition is
also used with the results in Fig. 14. Compare it with
Dong and Wang (2012), their Fig. 13, which used parcel
centroid spatial discretization, where the filamented slot-
ted cylinders showed some sawtooth in TTS-C, which
can be attributed to the inverse distance weighted in-
terpolation. This problem is avoided in TTS-I by de-
scribing the interfaces of each parcel explicitly, and this
will give more accurate region that a parcel will influ-
ence. Thus, TTS-I has better performance when advect-
ing discontinuous tracers.
4. Conclusions
This study is a proof of concept, where the previous
parcel centroid spatial discretization in Dong and Wang
(2012) (TTS-C) is replaced by parcel interface (TTS-I).
This type of spatial discretization can eliminate the un-
physical global renormalization for conserving total mass.
The curvature changes of parcel polygon interfaces are
captured by a novel proposed curvature-guard algorithm
(CGA), including edge-splitting and edge-merging sub-
algorithms, etc. To avoid potential edge-crossing problems,
vertex–edge-approaching detection and potential cross-
ing detection subalgorithms are also devised to make
CGA capable to deal with extreme cases in the region of
large deformation. It should be noted that the parame-
ters in edge-splitting and edge-merging algorithms are
vital to successful simulations. For the time being, they are
only the functions of edge length, which will make longer
edge split more easily. Further research must be carried
out to formulate a more objective and optimal form of
them. For example, the deformation of the flow should be
taken into consideration to make CGA more effective.
Another major effort in this study is constructing a
first-order conservative remapping algorithm that can
deal with polygons with arbitrary shape (may be concave),
which is not covered by the previous popular similar
package: the Spherical Coordinate Remapping and
Interpolation Package. The existing higher-order remap-
ping (e.g., Geometrically Exact Conservative Remapping)
could be incorporated to improve accuracy when remap-
ping from background mesh cells to parcel polygons.
The polar stereographic plane introduced to tackle
Pole problems in TTS-C degenerates the accuracy of
TTS-I. In future research, a more effective solution
should be sought or other mesh without Pole problems
could be used. Although the convergence rate of TTS-I
is only first order in the current research, the perfor-
mance of it is not as low as other first-order schemes,
especially in the discontinuous test cases.
The polygon-splitting subalgorithms, which are im-
portant for the real application of TTS-I, will be em-
phasized in the future works, and real flows outputted
by an atmospheric model or from a reanalysis data will
be used to verify the practicability of TTS-I. In addi-
tion, the parallel implementation of TTS-I is not
achieved for the time being. It will be quite different
from the static Eulerian counterparts, and may be not
trivial.
Acknowledgments. The authors acknowledge the Min-
istry of Science and Technology of China for the Na-
tional Basic Research Program of China (973 Program:
Grant 2011CB309704) and the National High-tech R&D
Program (863 Program: Grant 2010AA012304).
APPENDIX A
Calculation of Orientation
During the running of TTS-I, the orientation of the
vertex relative to the edge is important geometric in-
formation as shown in Fig. A1a. Assume the spherical
and Cartesian coordinates of vertices A, B, and C are
(lA,uA), xA5 (xA, yA, zA) ,
(lB,uB), xB 5 (xB, yB, zB), and
(lC,uC), xC 5 (xC, yC, zC) ,
then the orientation can be judged from the sign of the
determinant of a matrix
det5
������xC yC zCxA yA zAxB yB zB
������ .
Because of the floating-point error, a small criteria � (here,
10216) is adopted as
8<:
det. � , left side,
det, 2� , right side,
otherwise, on the edge.
JANUARY 2013 DONG AND WANG 335

APPENDIX B
Calculation of Angle
When calculating spherical polygon area and calling
curvature-guard algorithm, the angles between edges as
shown in Fig. A1bmust be calculated first. The spherical
andCartesian coordinates of vertices of edgeAB and edge
BC are assumed as above. The normal vectors of the two
edges are
nAB 5 xA 3 xB and
nBC 5 xB3 xC ,
respectively. Then the angle u is
u5
�arccos(2nAB � nBC) xB � (nAB 3 nBC)$ 0,
2p2 arccos(2nAB � nBC) xB � (nAB 3 nBC), 0.
(B1)
The conditional branches are for handling the angles that
are greater than 1808.
APPENDIX C
Calculation of Spherical Polygon Area
The formula of the spherical polygon area is very simple,
which is known as Girard’s theorem, as follows:
S5R2eE , (C1)
FIG. A1. Schemas of spherical calculations. (a) Calculate the orientation of point C to edge
AB. (b) Calculate the angle between edge AB and BC. (c) Calculate the projection of point C
onto edge AB. (d) Calculate the intersections of AB–CD and EF–GH. (e) Ray-casting algo-
rithm for judging a point in a polygon or not. (f) Ray-casting algorithm on the sphere.
336 MONTHLY WEATHER REV IEW VOLUME 141

where S is the area, Re the radius of the sphere, and E is
the spherical excess of the polygon defined as
E5 �N
i51
ui2 (N2 2)p ,
where N is the edge number of the polygon. Angle ui is
calculated from (9).
APPENDIX D
Calculation of Projection
The projection of a vertex onto an edge is an impor-
tant geometric information for approaching detection
algorithm (section 2c). Assume the edge AB and the
vertex C with the coordinates as above (see Fig. A1c).
First get the rotating North Pole P, (lP, uP), which
makes the edge AB on the equator in the rotated co-
ordinate system. This can be achieved by rotating B
with A as the North Pole to get (l0B, l0B), set a tempo-
rary coordinate (l0B 2 (p/2), 0), and rotate it reversely
to the original coordinate system to get point P. Then
rotate A, B, and C with P as the North Pole to get
(l0A, l0A), (l
0B, l
0B), and (l0C, l
0C). The projection in this
rotated coordinate system is just (l0C, 0), and judge
whether the projection is on the edge considering
zonal periodic boundary condition. The rotation for-
mula is
8>><>>:
l0(l,u)5 arctan
"cosu sin(l2 lp)
cosu sinup cos(l2 lp)2 cosup sinu
#,
u0(l,u)5 arcsin[sinu sinup1 cosu cosup cos(l2 lp)] ,
and the inverse rotation formula is8>><>>:
l(l0,u0) 5 lp 1 arctan
cosu0 sinl0
sinu0 cosup 1 cosu0 cosl0 sinup
!,
u(l0,u0) 5 arcsin(sinu0 sinup 2 cosu0 cosup cosl0) .
APPENDIX E
Calculation of Intersection
a. Intersection between two great-circle arcs
Calculate the intersection between arc AB and CD as
shown in Fig. A1d. Firstly, compute the normal vectors
of the two planes defined by AB–CD and sphere center,
respectively, as
nAB5 xA3 xB and
nCD 5 xC 3 xD .
Secondly, compute the cross product
v5nAB 3nCDjnABjjnCDj
.
Note that when the denominator is less than a small
criteria � (here, 10212 because of the floating-point er-
ror), there would be no intersection. Then the intersection
is one of the end points of the dashed line 1 in Fig.A1d and
is chosen by the following judgment:
(xA3 x) � (xB 3 x), 0 and (xC 3 x) � (xD 3 x), 0,
where x is one of the end points. If the judgment is true,
that end point will be the intersection.
b. Intersection between great-circle arcand latitude segment
In Fig. A1d, calculate the intersection between great-
circle arc EF and the latitude segment GH with latitude
u. The planes where they reside are defined as
ax1 by1 cz5 0,
z5R sin(u) ,
where a, b, and c are the components of the normal
vector of the plane where EF resides; R is the radius of
the sphere. Eliminate x from the above two equations to
get
y21 2bcz
a21 b2y1
(a21 c2)z22 a2R2
a21 b25 0.
JANUARY 2013 DONG AND WANG 337

Solve this quadratic equation to get
y52d6 e ,
where d5 bcz/(a2 1 b2), and e5ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffid2 2 [(a2 1 c2)z2 2 a2R2]/(a2 1 b2)
p. Then x5 (2by2
cz)/a. The intersection is one of the end points of the
dashed line 2 in Fig. 15c and is chosen by the following
judgment
lG # l# lH and (xE3 x) � (xF 3 x), 0,
where x is one of the end points and l is the longitude.
Similar calculation has also been given inNair et al. (1999).
In some cases, the floating-point error is so large that no
or wrong intersection is produced by the above formulas,
and this will affect the next calculations. Thus, when this
happens, higher precision floating-point computations
are adopted [e.g., the Multiple Precision Floating-Point
Reliably (MPFR; see http://www.mpfr.org and http://
www.holoborodko.com/pavel/mpfr) library can be used
in C11].
APPENDIX F
Ray-Casting Algorithm
To judge whether a point is located in a polygon on the
sphere, the ray-casting algorithm (RCA; see http://en.
wikipedia.org/wiki/Point_in_polygon) can be used. The
original RCA handles only polygons in Cartesian space
as shown in Fig. A1e. The hollow circle is the point for
judgment. First, cast a ray from the point to infinity along
the x or y axis. Second, calculate the number of inter-
sections between the ray and polygonal edges. If the
number is odd, the point is inside the polygon; other-
wise, it is outside the polygon. For application on the
sphere, rotate the spherical coordinate system with
the point as the North Pole, and project the point and
the polygon onto the equatorial plane as shown in Fig.
A1f; then the original RCA can be used.
REFERENCES
Aulisa, E., S. Manservisi, and R. Scardovelli, 2004: A surface
marker algorithm coupled to an area-preserving marker redis-
tribution method for three-dimensional interface tracking.
J. Comput. Phys., 197, 555–584.Behrens, J., 2006: Adaptive Atmospheric Modeling: Key Tech-
niques in Grid Generation, Data Structures, and Numerical
Operations with Applications. Lecture Notes in Computational
Science and Engineering, Vol. 54, Springer, 233 pp.
Donea, J., A. Huerta, J.-P. Ponthot, and A. Rodrıguez-Ferran,
2004: Arbitrary Lagrangian–Eulerian methods. Funda-
mentals, E. Stein, R. de Borst, and T. J. R. Hughes, Eds.,
Vol. 1, Encyclopedia of Computational Mechanics, Wiley,
413–437.
Dong, L., and B. Wang, 2012: Trajectory-tracking scheme in La-
grangian form for solving linear advection problems: Pre-
liminary tests. Mon. Wea. Rev., 140, 650–663.Dritschel, D. G., 1988: Contour surgery: A topological reconnection
scheme for extended integrations using contour dynamics.
J. Comput. Phys., 77, 240–266.
Dukowicz, J. K., and J. R. Baumgardner, 2000: Incremental re-
mapping as a transport/advection algorithm. J. Comput. Phys.,
160, 318–335.
Enright, D., R. Fedkiw, J. Ferziger, and I. Mitchell, 2002: A hybrid
particle level set method for improved interface capturing.
J. Comput. Phys., 183, 83–116.
——, F. Losasso, and R. Fedkiw, 2005: A fast and accurate semi-
Lagrangian particle level set method.Comput. Struct., 83, 479–
490.
Flyer, N., and E. Lehto, 2010: Rotational transport on a sphere:
Local node refinement with radial basis functions. J. Comput.
Phys., 229, 1954–1969.
Hieber, S. E., and P. Koumoutsakos, 2005: A Lagrangian particle
level set method. J. Comput. Phys., 210, 324–367.Hirt, C.W., and B. D. Nichols, 1981: Volume of fluid (VOF)method
for the dynamics of free boundaries. J. Comput. Phys., 39,
201–225.
Jones, P.W., 1999: First- and second-order conservative remapping
schemes for grids in spherical coordinates. Mon. Wea. Rev.,
127, 2204–2210.
Lauritzen, P. H., and R. D. Nair, 2008: Monotone and conservative
cascade remapping between spherical grids (CaRS): Regular
latitude–longitude and cubed-sphere grids. Mon. Wea. Rev.,
136, 1416–1432.
——, and J. Thuburn, 2012: Evaluating advection/transport
schemes using interrelated tracers, scatter plots and numerical
mixing diagnostics. Quart. J. Roy. Meteor. Soc., 138, 906–918.
——, R. D. Nair, and P. A. Ullrich, 2010: A conservative semi-
Lagrangian multi-tracer transport scheme (CSLAM) on the
cubed-sphere grid. J. Comput. Phys., 229, 1401–1424.——, C. Jablonowski, M. A. Taylor, and R. D. Nair, Eds., 2011:
Numerical Techniques for Global Atmospheric Models. 1st ed.
Lecture Notes in Computational Science and Engineering,
Vol. 80, Springer, 580 pp.
——, W. C. Skamarock, M. J. Prather, and M. A. Taylor, 2012: A
standard test case suite for two-dimensional linear transport
on the sphere. Geosci. Model Dev. Discuss., 5, 887–901.
Lin, S.-J., and R. B. Rood, 1996: Multidimensional flux-form semi-
Lagrangian transport schemes.Mon. Wea. Rev., 124, 2046–2070.Liu, G. R., andM. B. Liu, 2003: Smoothed Particle Hydrodynamics:
A Meshfree Particle Method. World Scientific Publishing
Company, 449 pp.
McKenna, D. S., P. Konopka, J.-U. Groofl, G. Gunther, R. Muller,
R. Spang, D. Offermann, and Y. Orsolini, 2002a: A new
Chemical Lagrangian Model of the Stratosphere (CLaMS) 1.
Formulation of advection and mixing. J. Geophys. Res., 107,
4309, doi:10.1029/2000JD000114.
——, J.-U. Groofl, G. Gunther, P. Konopka, R. Muller, G. Carver,
and Y. Sasano, 2002b: A new Chemical Lagrangian Model
of the Stratosphere (CLaMS) 2. Formulation of chemistry
scheme and initialization. J. Geophys. Res., 107, 4256,
doi:10.1029/2000JD000113.
Nair, R. D., and B. Machenhauer, 2002: The mass-conservative
cell-integrated semi-Lagrangian advection schemeon the sphere.
Mon. Wea. Rev., 130, 649–667.
338 MONTHLY WEATHER REV IEW VOLUME 141

——, and C. Jablonowski, 2008: Moving vortices on the sphere: A
test case for horizontal advection problems. Mon. Wea. Rev.,
136, 699–711.
——, and P. H. Lauritzen, 2010: A class of deformational flow test
cases for linear transport problems on the sphere. J. Comput.
Phys., 229, 8868–8887.
——, J. Cote, and A. Staniforth, 1999: Cascade interpolation for
semi-Lagrangian advection over the sphere. Quart. J. Roy.
Meteor. Soc., 125, 1445–1468.
Noh, W., and P. Woodward, 1976: SLIC (simple line interface
calculation). Proc. Fifth Int. Conf. on Numerical Methods in
FluidDynamics,Enschede, Netherlands, University of Twente,
330–340.
Osher, S. J., and R. P. Fedkiw, 2003: Level Set Methods and Dy-
namic Implicit Surfaces.Applied Mathematical Sciences, Vol.
153, Springer, 296 pp.
Purser, R. J., and L. M. Leslie, 1991: An efficient interpolation
procedure for high-order three-dimensional semi-Lagrangian
models. Mon. Wea. Rev., 119, 2492–2498.Putman, W. M., and S.-J. Lin, 2007: Finite-volume transport on
various cubed-sphere grids. J. Comput. Phys., 227, 55–78.
Reithmeier, C., andR. Sausen, 2002:ATTILA:Atmospheric tracer
transport in a Lagrangian model. Tellus, 54B, 278–299.Rood, R. B., 1987: Numerical advection algorithms and their role
in atmospheric transport and chemistry models. Rev. Geo-
phys., 25, 71–100.Rudman, M., 1997: Volume-tracking methods for interfacial flow
calculations. Int. J. Numer. Methods Fluids, 24, 671–691.
Stenke, A., V. Grewe, and M. Ponater, 2008: Lagrangian transport
of water vapor and cloud water in the ECHAM4GCM and its
impact on the cold bias. Climate Dyn., 31, 491–506.
Thuburn, J., and M. E. McIntyre, 1997: Numerical advection
schemes, cross-isentropic random walks, and correlations be-
tween chemical species. J. Geophys. Res., 102 (D6), 6775–6797.
Tryggvason, G., and Coauthors, 2001: A front tracking method for
the computations of multiphase flow. J. Comput. Phys., 169,708–759.
Ubbink, O., and R. I. Issa, 1999: Amethod for capturing sharp fluid
interfaces on arbitrary meshes. J. Comput. Phys., 153, 26–50.
Ullrich, P. A., P. H. Lauritzen, and C. Jablonowski, 2009: Geo-
metrically Exact Conservative Remapping (GECoRe): Reg-
ular latitude–longitude and cubed-sphere grids. Mon. Wea.
Rev., 137, 1721–1741.——, ——, and ——, 2012: Some considerations for high-order
‘incremental remap’-based transport schemes: Edges, re-
constructions, and area integration. Int. J. Numer. Methods
Fluids, doi:10.1002/fld.3703, in press.
Walton, J. J., M. C. MacCracken, and S. J. Ghan, 1988: A global-
scale Lagrangian trace species model of transport, trans-
formation, and removal processes. J. Geophys. Res., 93 (D7),
8339–8354.
Wohltmann, I., and M. Rex, 2009: The Lagrangian chemistry and
transport model ATLAS: Validation of advective transport
and mixing. Geosci. Model Dev., 2, 153–173.Yu, R., 1994: A two-step shape-preserving advection scheme.Adv.
Atmos. Sci., 11, 479–490.
JANUARY 2013 DONG AND WANG 339




















