TRABAJO COLABORATIVO No. 2
20
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS TRABAJO COLABORATIVO No. 2 Nombre de curso: 201527 – Sistemas Dinámicos Temáticas revisadas: Unidad 2, capítulo 1 – Análisis de la respuesta en el tiempo. Unidad 2, capítulo 2 – Análisis de respuesta en frecuencia. Unidad 2, capítulo 3 – Análisis del LGR y del espacio de estados. 1. NOTA ACLARATORIA El curso SISTEMAS DINÁMICOS – 201527 es de tipo Metodológico (Teórico/Práctico); por lo tanto, hay que tener en cuenta que los trabajos colaborativos contienen una actividad teórica y otra actividad práctica. La actividad teórica se debe desarrollar de forma analítica, mientras que la actividad práctica se debe desarrollar utilizando la herramienta de software MATLAB®, que se encuentra licenciada por parte de la universidad, y a la cual pueden acceder a través del representante de la GIDT del CEAD en el cual se encuentra matriculado el estudiante. Los tutores que orientan la práctica de forma local pueden asesorar al estudiante en el desarrollo de la misma pero NO DEBEN CALIFICARLA, puesto que el informe que el estudiante coloca en el FORO del curso virtual evidencia ambos desarrollos y, por lo tanto, la nota de laboratorio está inmersa en la nota del trabajo colaborativo. Agradezco tener en cuenta esta aclaración e informar a los tutores encargados con el fin de evitar mal entendidos al finalizar el periodo académico. ¡Éxitos! 2. ANÁLISIS DE SISTEMAS Una vez obtenidos el modelo matemático apropiado de un sistema, ya sea en forma de espacio de estado o de función de transferencia, entonces se puede analizar este modelo para predecir cómo responderá el sistema, tanto en el dominio del tiempo como de la frecuencia. Para poner esto en contexto, los sistemas de control son a menudo diseñados para mejorar la estabilidad, la velocidad de respuesta, el error en estado estacionario, o para prevenir oscilaciones. A continuación se mostrará cómo determinar las propiedades dinámicas del modelo del sistema. 2.1. Generalidades de la Respuesta en el Tiempo La respuesta en el tiempo representa cómo cambia el estado de un sistema dinámico en el tiempo cuando se somete a una entrada en particular. Dado que los modelos generalmente consisten de ecuaciones diferenciales, debe llevarse a cabo alguna integración con el fin de determinar la respuesta en el tiempo del sistema. Una solución analítica de forma cerrada puede estar disponible para algunos sistemas simples. Sin embargo, para la mayoría de los sistemas, especialmente los sistemas no lineales o los que están sujetos a fuerzas de entrada complicadas, esta integración debe llevarse a cabo numéricamente. Afortunadamente, MATLAB® proporciona muchos recursos útiles para el cálculo de respuestas en el tiempo para muchos tipos de entradas, como se verá más adelante.
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of TRABAJO COLABORATIVO No. 2
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
TRABAJO COLABORATIVO No. 2 Nombre de curso: 201527 – Sistemas Dinámicos Temáticas revisadas: Unidad 2, capítulo 1 – Análisis de la respuesta en el tiempo. Unidad 2, capítulo 2 – Análisis de respuesta en frecuencia. Unidad 2, capítulo 3 – Análisis del LGR y del espacio de estados. 1. NOTA ACLARATORIA El curso SISTEMAS DINÁMICOS – 201527 es de tipo Metodológico (Teórico/Práctico); por lo tanto, hay que tener en cuenta que los trabajos colaborativos contienen una actividad teórica y otra actividad práctica. La actividad teórica se debe desarrollar de forma analítica, mientras que la actividad práctica se debe desarrollar utilizando la herramienta de software MATLAB®, que se encuentra licenciada por parte de la universidad, y a la cual pueden acceder a través del representante de la GIDT del CEAD en el cual se encuentra matriculado el estudiante. Los tutores que orientan la práctica de forma local pueden asesorar al estudiante en el desarrollo de la misma pero NO DEBEN CALIFICARLA, puesto que el informe que el estudiante coloca en el FORO del curso virtual evidencia ambos desarrollos y, por lo tanto, la nota de laboratorio está inmersa en la nota del trabajo colaborativo. Agradezco tener en cuenta esta aclaración e informar a los tutores encargados con el fin de evitar mal entendidos al finalizar el periodo académico. ¡Éxitos! 2. ANÁLISIS DE SISTEMAS Una vez obtenidos el modelo matemático apropiado de un sistema, ya sea en forma de espacio de estado o de función de transferencia, entonces se puede analizar este modelo para predecir cómo responderá el sistema, tanto en el dominio del tiempo como de la frecuencia. Para poner esto en contexto, los sistemas de control son a menudo diseñados para mejorar la estabilidad, la velocidad de respuesta, el error en estado estacionario, o para prevenir oscilaciones. A continuación se mostrará cómo determinar las propiedades dinámicas del modelo del sistema. 2.1. Generalidades de la Respuesta en el Tiempo La respuesta en el tiempo representa cómo cambia el estado de un sistema dinámico en el tiempo cuando se somete a una entrada en particular. Dado que los modelos generalmente consisten de ecuaciones diferenciales, debe llevarse a cabo alguna integración con el fin de determinar la respuesta en el tiempo del sistema. Una solución analítica de forma cerrada puede estar disponible para algunos sistemas simples. Sin embargo, para la mayoría de los sistemas, especialmente los sistemas no lineales o los que están sujetos a fuerzas de entrada complicadas, esta integración debe llevarse a cabo numéricamente. Afortunadamente, MATLAB® proporciona muchos recursos útiles para el cálculo de respuestas en el tiempo para muchos tipos de entradas, como se verá más adelante.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
La respuesta en el tiempo de un sistema dinámico lineal se compone de la suma de la respuesta transitoria que depende de las condiciones iniciales y de la respuesta en estado estacionario que depende de la entrada del sistema. Estas corresponden respectivamente a las soluciones libre (entrada homogénea o cero) y forzada (entrada no homogénea o no-cero) de las ecuaciones diferenciales que gobiernan el sistema. 2.2. Generalidades de la Respuesta en Frecuencia Todos los ejemplos presentados a continuación se modelan por ecuaciones diferenciales lineales con coeficientes constantes y por lo tanto son lineales e invariantes en el tiempo (LTI). Los sistemas LTI tienen una propiedad extremadamente importante: si la entrada del sistema es sinusoidal, entonces la salida en estado estacionario también será sinusoidal de la misma frecuencia pero en general con diferente magnitud y la fase. Estas diferencias de magnitud y fase como una función de la frecuencia comprenden la respuesta en frecuencia del sistema. La respuesta en frecuencia de un sistema se puede encontrar a partir de la función de transferencia de la siguiente manera: cree un vector de frecuencias (que varíe entre cero o "DC" hasta infinito) y calcule el valor de la función de transferencia de la planta en esas frecuencias. Si �(�) es la función de transferencia en lazo abierto de un sistema y � es el vector de frecuencia, entonces se dibuja �(��) contra �. Dado que �(��) es un número complejo, se puede dibujar tanto su magnitud como su fase (diagrama de Bode) o su posición en el plano complejo (diagrama de Nyquist). Ambos métodos muestran la misma información en diferentes maneras. 2.3. Estabilidad Para nuestros propósitos, se utilizará la definición de estabilidad Entrada Acotada Salida Acotada (BIBO) que establece que un sistema es estable si la salida se mantiene acotada para todas las entradas acotadas (finitas). En la práctica, esto significa que el sistema no va a "explotar" durante la operación. La representación en función de transferencia es especialmente útil en el análisis de la estabilidad del sistema. Si todos los polos de la función de transferencia (valores de � en los que el denominador es igual a cero) tienen partes reales negativas, entonces el sistema es estable. Si cualquier polo tiene parte real positiva, entonces el sistema es inestable. Si se ven los polos en el plano complejo �, entonces todos los polos deben estar en el semiplano izquierdo (LHP) para asegurar la estabilidad. Si cualquier par de polos está sobre el eje imaginario, entonces el sistema es marginalmente estable y el sistema oscilará. Los polos del modelo de un sistema LTI se pueden encontrar fácilmente en MATLAB®, como se muestra a continuación:
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
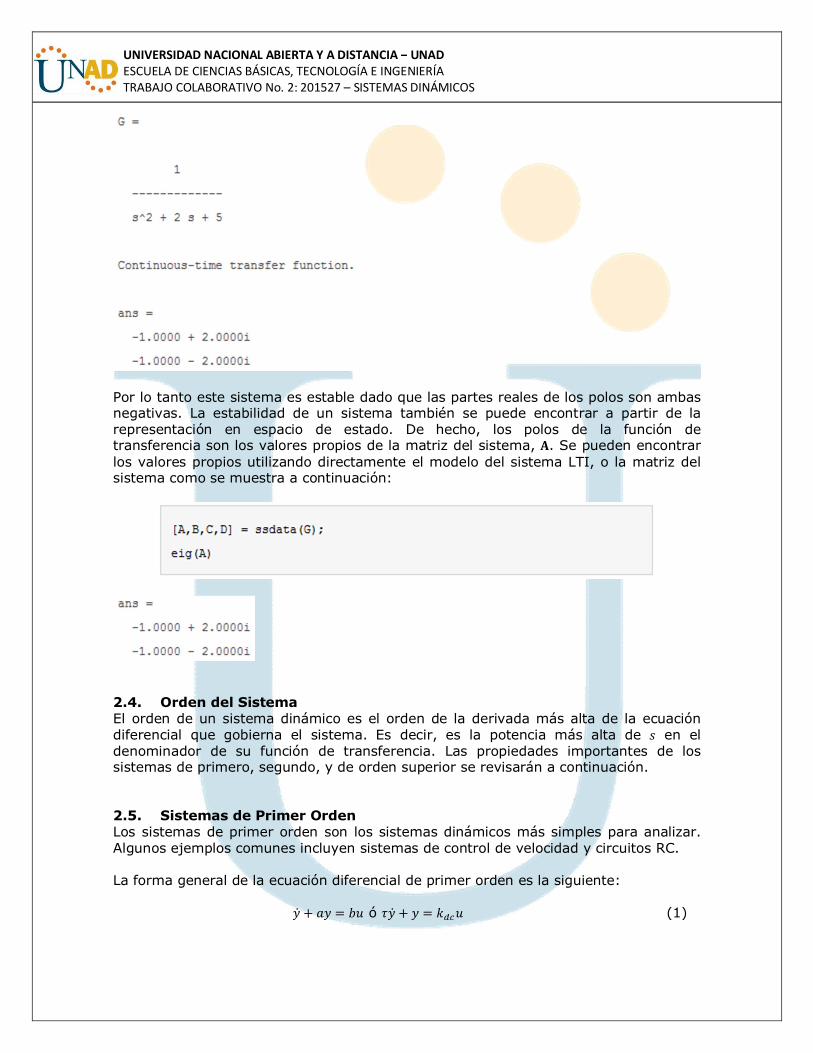
Por lo tanto este sistema es estable dado que las partes reales de los polos son ambas negativas. La estabilidad de un sistema también se puede encontrar a partir de la representación en espacio de estado. De hecho, los polos de la función de transferencia son los valores propios de la matriz del sistema, �. Se pueden encontrar los valores propios utilizando directamente el modelo del sistema LTI, o la matriz del sistema como se muestra a continuación:
2.4. Orden del Sistema El orden de un sistema dinámico es el orden de la derivada más alta de la ecuación diferencial que gobierna el sistema. Es decir, es la potencia más alta de � en el denominador de su función de transferencia. Las propiedades importantes de los sistemas de primero, segundo, y de orden superior se revisarán a continuación. 2.5. Sistemas de Primer Orden Los sistemas de primer orden son los sistemas dinámicos más simples para analizar. Algunos ejemplos comunes incluyen sistemas de control de velocidad y circuitos RC. La forma general de la ecuación diferencial de primer orden es la siguiente:
�̇ + �� = �� ó ��̇ + � = ���� (1)
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
La función de transferencia de primer orden es
�(�) =�
� + �=
����� + 1
(2)
2.5.1. Ganancia DC La ganancia DC, ���, es la relación entre la magnitud de la respuesta escalón en estado estacionario y la magnitud de la entrada escalón. Del Teorema del Valor Final, para funciones de transferencia estables, la ganancia DC es el valor de la función de transferencia cuando � = 0. Para sistemas de primer orden es igual a ��� = � �⁄ . 2.5.2. Constante de Tiempo La constante de tiempo �� = � = 1 �⁄ es el tiempo que le toma al sistema alcanzar el 63% del valor en estado estacionario para una respuesta escalón o para disminuir al 37% del valor inicial para una respuesta impulso. En general, representa la escala de tiempo para la cual la dinámica del sistema es significativa. 2.5.3. Polos/Ceros Hay un solo polo real en � = −�. Por lo tanto, el sistema es estable si � es positivo e inestable si � es negativo. No hay ceros. 2.5.4. Respuesta Escalón Se puede calcular la respuesta en el tiempo del sistema ante una entrada escalón de magnitud � de la siguiente manera:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
Si usted da clic derecho sobre la respuesta escalón y selecciona Características, usted puede obtener diferentes valores acerca de la respuesta del sistema: respuesta pico, tiempo de establecimiento, tiempo de subida, y estado estacionario. 2.5.5. Tiempo de Establecimiento El tiempo de establecimiento, ��, es el tiempo requerido para que la salida del sistema caiga dentro de un cierto porcentaje (por ejemplo, 2%) del valor en estado estacionario para una entrada escalón o de forma equivalente para que disminuya a un determinado porcentaje del valor inicial para una entrada impulso. Los tiempos de establecimiento para sistemas de primer orden para las tolerancias más comunes se presentan en la siguiente tabla. Tenga en cuenta que entre más estricta sea la
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
tolerancia, más tarda la respuesta del sistema para establecerse dentro de esta tolerancia, como se espera.
10% 5% 2% 1%
�� = �.� �⁄ = �.��� �� = 3 �⁄ = 3�� �� = 3.9 �⁄ = 3.9�� �� = 4.6 �⁄ = 4.6��
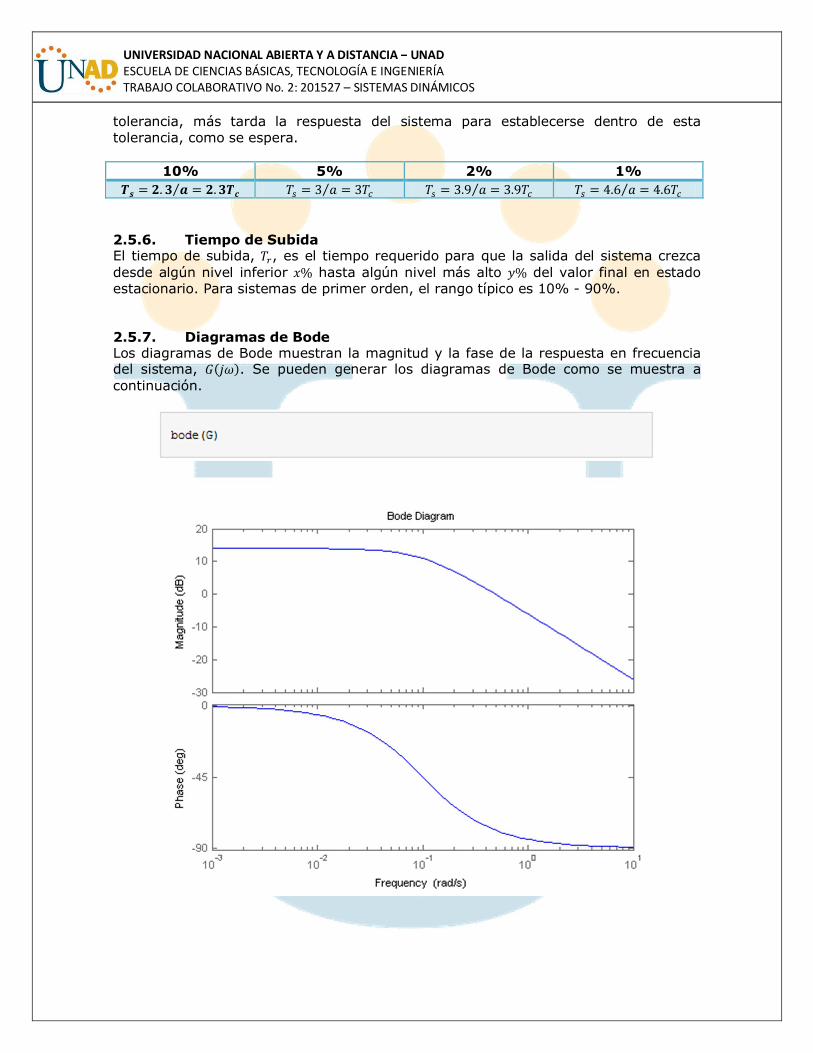
2.5.6. Tiempo de Subida El tiempo de subida, ��, es el tiempo requerido para que la salida del sistema crezca desde algún nivel inferior �% hasta algún nivel más alto �% del valor final en estado estacionario. Para sistemas de primer orden, el rango típico es 10% - 90%. 2.5.7. Diagramas de Bode Los diagramas de Bode muestran la magnitud y la fase de la respuesta en frecuencia del sistema, �(��). Se pueden generar los diagramas de Bode como se muestra a continuación.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
Los diagramas de Bode utilizan una escala de frecuencia logarítmica, de modo que es visible un rango de frecuencias más amplio. Además, la magnitud se representa mediante la unidad logarítmica decibelios (dB) definida como:
��� = 20 log��(�) (3) Al igual que la frecuencia, la escala en decibelios permite ver un rango mucho más amplio de magnitudes en un solo gráfico. Además, cuando los sistemas se combinan o se agregan controladores, las funciones de transferencia a menudo se multiplican entre sí. Usando la escala en dB, se pueden simplemente sumar las magnitudes de las funciones de transferencia. Tenga en cuenta, que también se pueden sumar los ángulos de fase aunque estos no se muestran en una escala logarítmica. La magnitud a baja frecuencia del diagrama de Bode de primer orden es 20 log(���). El gráfico de magnitud tiene una curva en la frecuencia igual al valor absoluto del polo (es decir, � = �) y, a continuación disminuye en 20 dB por cada incremento en un factor de diez de la frecuencia (-20dB/década). El diagrama de fase es asintótico a 0 grados en baja frecuencia, y asintótico a -90 grados en alta frecuencia. Entre las frecuencias 0.1� y 10�, la fase cambia en aproximadamente -45 grados por cada incremento en un factor de diez de la frecuencia (-45 grados/década). 2.6. Sistemas de Segundo Orden Los sistemas de segundo orden son frecuentes en la práctica, y es el tipo más simple de sistema dinámico que exhibe oscilaciones. De hecho, muchos sistemas reales de orden superior se modelan como sistemas de segundo orden con el fin de facilitar el análisis. Los ejemplos incluyen sistemas masa-resorte-amortiguador y circuitos RLC. La forma general de la ecuación diferencial de segundo orden es la siguiente:
� �̈ + ��̇ + �� = �(�) ó �̈ + 2��� �̇ + ���� = �����
�� (4) La función de transferencia de segundo orden es
�(�) =1
� �� + �� + �=
������
�� + 2���� + ��� (5)
2.6.1. Ganancia DC La ganancia DC, ���, es la relación entre la magnitud de la respuesta escalón en estado estacionario y la magnitud de la entrada escalón, y para sistemas estables es el valor de la función de transferencia cuando � = 0. Para sistemas de segundo orden:
��� =1
� (6)
2.6.2. Coeficiente de Amortiguamiento El coeficiente de amortiguamiento es una cantidad sin dimensiones que caracteriza las pérdidas de energía en el sistema debido a efectos tales como la fricción viscosa o la resistencia eléctrica. A partir de las definiciones anteriores,
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
� =�
2�� �⁄ (7)
2.6.3. Frecuencia Natural La frecuencia natural es la frecuencia (en rad/s) a la que el sistema oscilará cuando no hay amortiguamiento, � = 0.
�� = ��
� (8)
2.6.4. Polos/Ceros La función de transferencia de segundo orden tiene dos polos:
�� = −��� ± ����1 − �� (9)
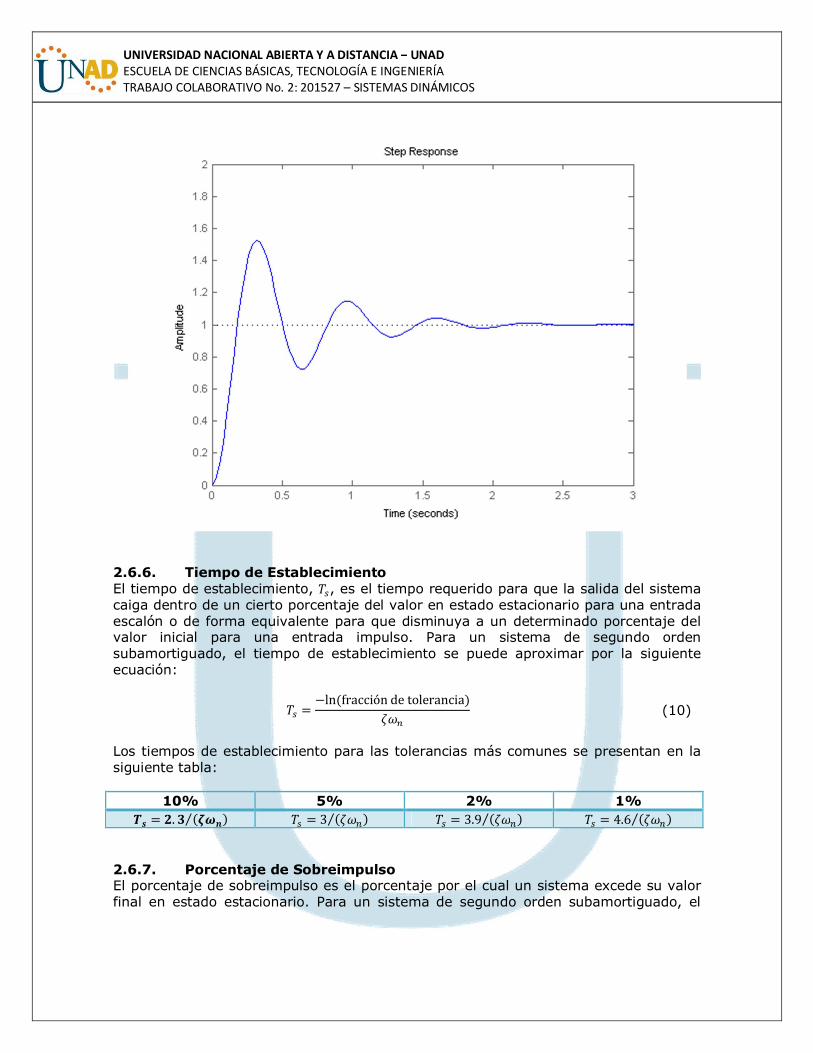
2.6.5. Sistemas Subamortiguados Si � < 1, entonces el sistema es subamortiguado. Ambos polos son valores complejos con partes reales negativas; por lo que el sistema es estable, pero oscila mientras se aproxima al valor en estado estacionario.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
2.6.6. Tiempo de Establecimiento El tiempo de establecimiento, ��, es el tiempo requerido para que la salida del sistema caiga dentro de un cierto porcentaje del valor en estado estacionario para una entrada escalón o de forma equivalente para que disminuya a un determinado porcentaje del valor inicial para una entrada impulso. Para un sistema de segundo orden subamortiguado, el tiempo de establecimiento se puede aproximar por la siguiente ecuación:
�� =−ln(fraccióndetolerancia)
���
(10)
Los tiempos de establecimiento para las tolerancias más comunes se presentan en la siguiente tabla:
10% 5% 2% 1%
�� = �.� (���)⁄ �� = 3 (���)⁄ �� = 3.9 (���)⁄ �� = 4.6 (���)⁄
2.6.7. Porcentaje de Sobreimpulso El porcentaje de sobreimpulso es el porcentaje por el cual un sistema excede su valor final en estado estacionario. Para un sistema de segundo orden subamortiguado, el
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
porcentaje de sobreimpulso está directamente relacionado con el coeficiente de amortiguamiento mediante la siguiente ecuación:
%�� = ��
���
������
∙ 100% (11)
Para sistemas de segundo orden subamortiguados, el tiempo de establecimiento �� (2%), el tiempo de subida ��, y el porcentaje de sobreimpulso %��, están relacionados con el amortiguamiento y la frecuencia natural como se muestra a continuación.
�� ≈4.6
�� (12)
�� ≈2.2
�� (13)
� =−ln(%�� 100⁄ )
��� + ln(%�� 100⁄ )� (14)
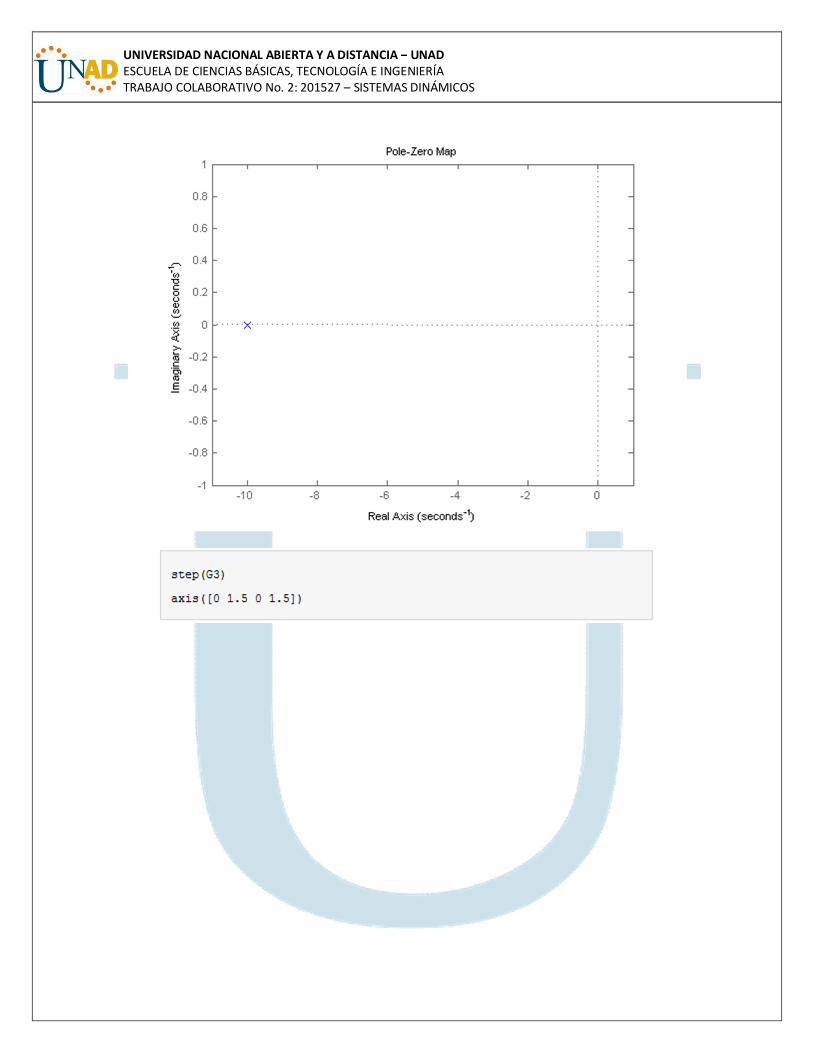
2.6.8. Sistemas Sobreamortiguados Si � > 1, entonces el sistema es sobreamortiguado. Ambos polos son reales y negativos; por lo que el sistema es estable y no oscila. La respuesta escalón y el mapa de polos-ceros de un sistema sobreamortiguado se obtienen a continuación:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
2.6.9. Sistemas Críticamente Amortiguados Si � = 1, entonces el sistema es críticamente amortiguado. Ambos polos son reales y tienen la misma magnitud, �� = −���. Los sistemas críticamente amortiguados se
acercan más rápido al estado estacionario sin oscilar.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
2.6.10. Sistemas No Amortiguados Si � = 0, entonces el sistema es no amortiguado. En este caso los polos son puramente imaginarios; por lo que el sistema es marginalmente estable y oscila indefinidamente.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
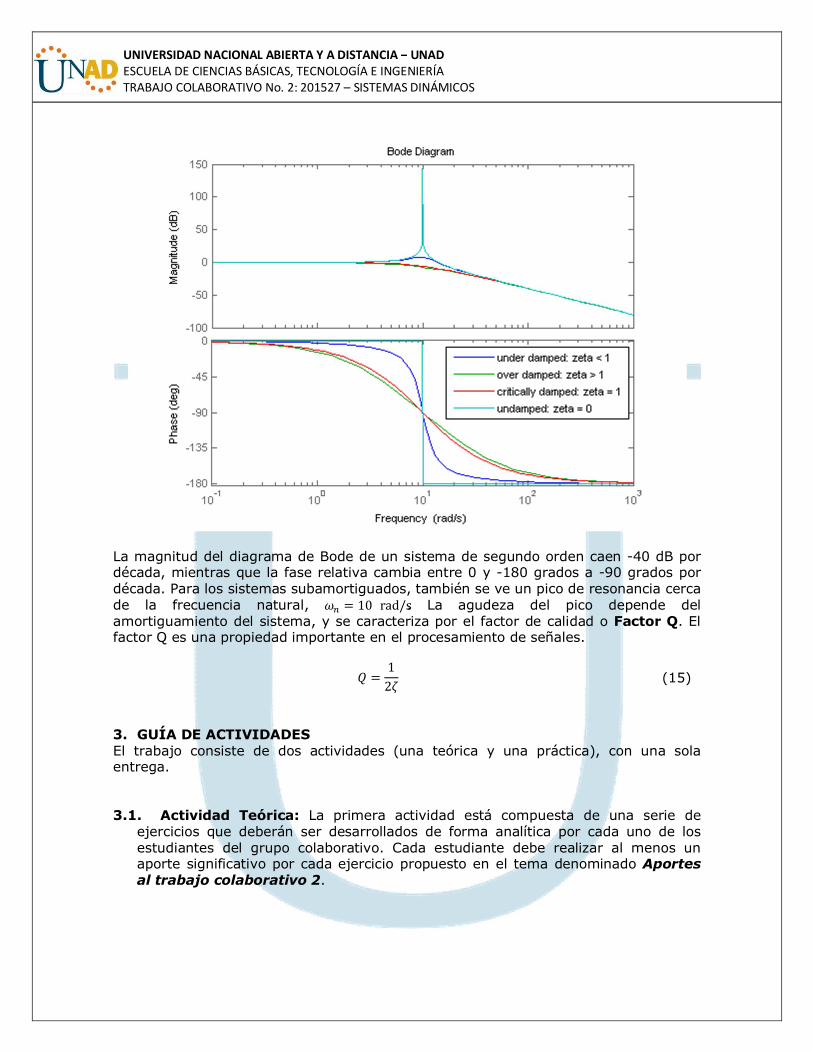
2.6.11. Diagramas de Bode A continuación se muestran los diagramas de Bode de Magnitud y Fase para todas las condiciones de amortiguamiento de un sistema de segundo orden:
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
La magnitud del diagrama de Bode de un sistema de segundo orden caen -40 dB por década, mientras que la fase relativa cambia entre 0 y -180 grados a -90 grados por década. Para los sistemas subamortiguados, también se ve un pico de resonancia cerca de la frecuencia natural, �� = 10rad/s. La agudeza del pico depende del amortiguamiento del sistema, y se caracteriza por el factor de calidad o Factor Q. El factor Q es una propiedad importante en el procesamiento de señales.
� =1
2� (15)
3. GUÍA DE ACTIVIDADES El trabajo consiste de dos actividades (una teórica y una práctica), con una sola entrega. 3.1. Actividad Teórica: La primera actividad está compuesta de una serie de
ejercicios que deberán ser desarrollados de forma analítica por cada uno de los estudiantes del grupo colaborativo. Cada estudiante debe realizar al menos un aporte significativo por cada ejercicio propuesto en el tema denominado Aportes al trabajo colaborativo 2.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
Ejercicio 1: La función de transferencia para el control de posición de un motor DC
es:
�(�) =Θ(�)
�(�)=
�
��(�� + �)(�� + �) + ���
Los parámetros a tener en cuenta son:
Momento de inercia del rotor: � = 3.2284x10��
Constante de fricción viscosa del motor: � = 3.5077x10��
Constante del motor: � = 0.0274
Resistencia eléctrica: � = 4
Inductancia eléctrica: � = 2.75x10��
De acuerdo con lo anterior y teniendo en cuenta que la entrada al sistema es el
voltaje �, y la salida es la posición angular �, determine la función de transferencia
del sistema en lazo cerrado con realimentación unitaria y realice la aproximación a
un sistema de segundo orden siguiendo el criterio de polos dominantes y encuentre
(a) la ganancia DC, (b) el coeficiente de amortiguamiento, (c) la frecuencia
natural, (d) el tiempo de establecimiento (criterio 2%), y (e) la frecuencia de corte
del sistema �.
Ejercicio 2: Las ecuaciones dinámicas del sistema de suspensión activa de un
autobús son:
���̈� = −��(�̇� − �̇�) − ��(�� − ��)+ �
���̈� = ��(�̇� − �̇�) + ��(�� − ��) + ��(�̇ − �̇�) + ��(� − ��) − �
Los parámetros a tener en cuenta son:
¼ de la masa del autobús: �� = 2500kg
Masa de la suspensión: �� = 320kg
Constante del resorte del sistema de suspensión: �� = 80000N/m
Constante del resorte de la rueda y el neumático: �� = 500000N/m
Constante de amortiguamiento del sistema de suspensión: �� = 350N. s/m
Constante de amortiguamiento de la rueda y el neumático: �� = 15020N. s/m
De acuerdo con lo anterior y teniendo en cuenta que las entradas al sistema son las
fuerzas � y �, y las salidas son los desplazamientos �� y ��, determine las funciones
de transferencia del sistema en lazo abierto ���(�) = ��(�) �(�)⁄ , ���(�) = ��(�) �(�)⁄ ,
���(�) = ��(�) �(�)⁄ y ���(�) = ��(�) �(�)⁄ , y realice la aproximación a sistemas de
segundo orden siguiendo el criterio de polos dominantes y encuentre (a) la
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS, TECNOLOGÍA E INGENIERÍA TRABAJO COLABORATIVO No. 2: 201527 – SISTEMAS DINÁMICOS
ganancia DC, (b) el coeficiente de amortiguamiento, (c) la frecuencia natural, (d)
el tiempo de establecimiento (criterio 2%), y (e) la frecuencia de corte del sistema
�.
3.2. Actividad Práctica: La segunda actividad está compuesta de una serie de ejercicios que deberán ser desarrollados utilizando la herramienta de software MATLAB®. Cada estudiante debe realizar al menos un aporte significativo por cada ejercicio propuesto en el tema denominado Aportes al trabajo colaborativo 2. Ejercicio 1: Con los datos suministrados en el Ejercicio 1 de la Actividad Teórica,
utilice MATLAB® para: (a) Obtener la respuesta del sistema en lazo cerrado ante
una entrada escalón unitario; (b) obtener el mapa de polos-ceros; y (c) obtener
los diagramas de Bode de magnitud y fase.
Ejercicio 2: Con los datos suministrados en el Ejercicio 2 de la Actividad Teórica,
utilice MATLAB® para: (a) Obtener la respuesta del sistema ante una entrada
escalón unitario; (b) obtener el mapa de polos-ceros; y (c) obtener los diagramas
de Bode de magnitud y fase.
4. ESPECIFICACIONES DEL PRODUCTO FINAL DEL TRABAJO
El archivo final debe estar comprimido y se le debe asignar un nombre que tenga la siguiente estructura: Codigodelcurso_NombredelGrupo y debe colgarse en el foro de equipo bajo el tema ENTREGA FINAL DEL TRABAJO No. 2. El archivo .ZIP debe incluir:
Un archivo en formato .PDF con el desarrollo detallado de la situación propuesta.
Debe incluir Portada, Introducción, desarrollo de la situación, conclusiones, referencias bibliográficas usadas.
Los archivos .M generados para la elaboración de las tareas propuestas.