The Utility and Validity of Kinematic GPS Positioning for the Geosar Airborne Terrain Mapping Radar...
33
E rn 5 6) $4 4 u tc- 0 0 El cj c k-4 W 31 v3 E;, z c-, + 0 0 v3 4
-
Upload
independent -
Category
Documents
-
view
2 -
download
0
Transcript of The Utility and Validity of Kinematic GPS Positioning for the Geosar Airborne Terrain Mapping Radar...

E
rn
5
6)
$4
4
u tc- 0
0
El
cj c
k-4 W
31 v3
E;, z
c-, +
0
0
v3
4

ccs 0
0
3 d
)
$”,
0
d)
E
a” Td d
ccs
d
0
*A
$”,
*r
rn 5
ccs $”,
c,
c a“ rn Td rl
3 v3
ccs k
0
k
*1
8 Td ca
ccs k
Li
+ 8 6
0
k
4
4
a a
a a
a a

e
a
3
a E=
0
a
5
Td
rcc 8 E %
Q
) 0
m
n
cd
Q)
m
a, a
cd d
m
a, 2 c,
4-r 0
d u'
4crl
L
a h
,
cd m
G
0
CI
4-r 0
Td r:
G
0
s cd > d)
cd 4
cd r
\
0'
Td c cd
u
"a,
k 0
cd ?-4
Q
)
cd 4
0
5
m
a cl
Td cl
3
0
El 8 ccc
s 0
4
00 II
c,
a, m
n
E 0 x
I
m
&
Q)
d
*r
l
k
5 9
H
w
3 W 0
' LC e,
2 2 a
i
cd
LJ I
Q)
3
k
Y
m
f6 0
a, Y
H
L-c
'w
c h
.rl \
a" a
9
!i I
a d L
Q)
0
3
Td 0
a"
d
9
P4 I I c n
'c
d
u u 'c
d
x I
I I
m
a\
0
0
0
0

I 1(1 Q
)
P
cn a Q
a, P
P
0
a
Q)

4
It
:


WJ
C
.d

ii 1

B Q)
I
m
h
m E
I
bo c 0
a
a
,A
CA
d)
a
c-,
c-, *
4
a
8 & d) c,
Tb c a
E a
c,
Tb a
4 3
*r
(
c,
c,
m
0
c,
bo F:
'E 6 Tb c a Jz bo c,
W
d) *
3
, 4-( m
c,
8 F: 3
0
rl 0
m
d)
*
d)
2 0
0
0
0
0
0
0
U

5
0
3
d)
m
. 8 s 0
W
8 (t: ce
2 H 8 E 0
0
4
1 rj
3
.d
c,
9 1
9 rl
d)
5
d)
ca 0
0
c,
*
CI 0
c! a
cit W
0
d
) k
d
) c,
*r
l
m
m
d)
0
0
&
W
El s 0
5 4
m
m
0
0
0
0
0

FIIy < ' ;,:,, " y Comparison of EGII Altitude measurements ;' (EO- 17) with integrated EGI vertical velocity
i- L
a:; .I, /"
8122 r t , , ' ) , ) I , , , " I " "
< G I Altltudo . lntoqr ltcd SGi . /orticni */oloclty I 8 1 2 0 - I
8 1 0 8 ~ " " ' " " " " ' ~ I , , , ,
0 5 0 100 1 5 0 2 0 0 2 5 0 Time (8)
A P L Presentation to Lockheed Martin TDS
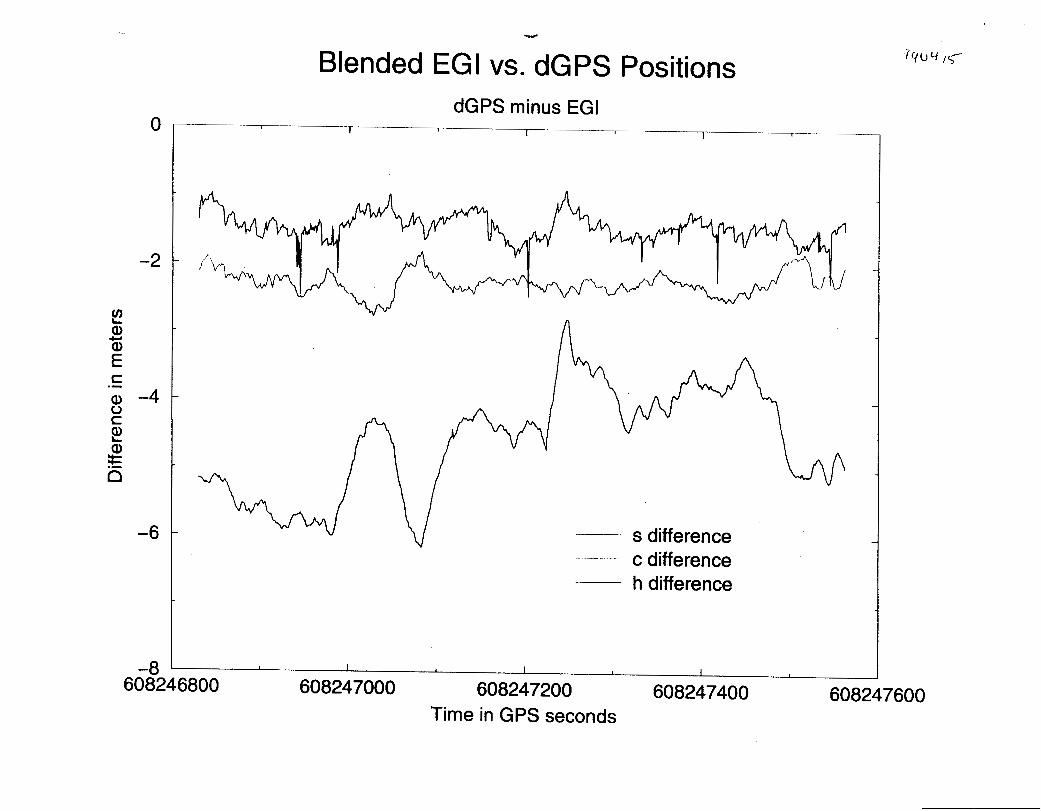
Comparison of High Rate EGI Position Measurements with Differential GPS Estimates
GooSAR
4.3 l " ' ~ l " " l ' " ' " ' ~ 0 .3
3 EGI - DGPS S j 4 . 2 _ .................... 0 ...... R4dmls . . to . .mbic . .&-)al..fit .............. i ............................. L... ......... ~ c 9 ................ 0 . 2
: , @ -4.1 E Y
cn cn p 4 8 z
3.9
3.8
3 .7 0 5 0 100 1 5 0
Time (s) 2 00 2 5 0

L L L J b I l C U C l U I I C\I L . \ I L . R I I L b U L I l U L L l l l L V I J e33 Comparison of High Rate EGI Position Measurements
with Differential GPS Estimates
OIQW
, , ,
- iGI . D G P S c -o- Residuals to quartic polynomial
...........................
1 . 6 " " " " " ' " " " " "
t -4 ,
i
."
0 5 0 100 1 5 0 200 Time (s)
J P L Presentation to Lockheed Martin TDS
2 50
OeoSAR
Comparison of High Rate EGI Position Measurements with Differential GPS Estimates
10. I " " I " ' I
-EGI - D G P S H j
t -o- Quadratic fit residuals 1 0
T 9.5 v
X 1 ... ....
I " ' i
p;= 0.0 4- .03 m ................................ ) .....................................
. , ...................................
7 . 5 I I 4 . I I 4 ' 1 , . I 1 - 1 .5
0 5 0 100 1 5 0 2 00 2 5 0 Time ( 4

v"
T-
i - I I C r r .(
-c

S
0
cn .I
0
.I
c,
.I
cn 0
a, X
0
cn
0
3
SJalaUJ U!

I I
L .
Y-
0
JL

i
II!
c9
cv l-
I

X
2 6
x 5 m I
0
32 "
X
A\
3 I/;
w A
0
+
4-1 5 m
a, 2
m k
a, U
: OJ
k
X
cu
a,
G
0
..-I cd
a e
a e
e
n
03 W
II II
I I
co
d
II
2 +

w
n
*
W
n
m
W
II
"Y
I
II
a k
a
cu n
W
II Y

Q,
n
u
n
I5
W
'I
-L
n
W
G
cd +
+ e d
G
QIQ W
II
fi
n
m
W
0" 0
n
ts W
0" 0
+ Y
n
cb
G
tt G
W
.d
m
n
W
*I
+
m
II e c3 G

Q)
M .
4
w
Q
II
Q)
4 Q
)
. a, 2 a
n
0
l-l W
n
l-l 4
W
-m n
mW
+ Ft c3
n
Y
F: cd
u
*
Q
G
.r( 8 k
k
w
0 m
.5 O
m

E2
W
k-
u
Q)
k
8 u Q,
G
0
*d
+
0" a
W
2 +
d'
g .s
n
m
l+
W
n
l+
Tr W
+ 6 a + c a + 4
c Q
Q
II
c Q
Q,
k
n
W
n
Ul
n

-1
Y


0
3 c>
2 + 4-1 0
hj h
k
4-1 a o
+
4
U
a
.d
d
+c
d
k
0 P
IG
3


4
II
41%
0
II
*I& 0
II
4%
r I
- n
s
0
SC
g
3
Y
8l 2 C
I 1
U I
II
'k I8 II 1%
n
8
W
v)
s m, + Y
n
..-I C
n
v)
W
U ._ C
111 m
G
d s 8 v
)
M

s W h
k
d)
b.13
u3 0
8 G
0
d) tt: w
E
0
.I
Y
.m
CA 0
a
E
E
0
0
8
cr
Y
2 E
0
.I
Y
.I
13 a
u
E
0
V
ccr Q)
*
2 E
0
.I
.I
Y
a
E
0
u
cr Q)
v1
Y
2 E L,
w h
E
a v
.I
Y
Y
a
z 4 E; .I
*
k
2
U
3
VI
Y
& 8 N
0 0 0 0
0
0
=. a,
a
5 no
o0
o0
00
00
w

6
c c a, c cd
w2
c,
M
c,
d)
ca
b
k
m
a,
a, m
M
+i 5
Td c cd
2 0
*A
u
CI
d)
44 n
c,
a 8 W
ca k
CI
Tb d
) *+I m
0
a
24 0
0
rc a, a
0
s d)
k
44 0
cd k
c,
&
c 0
44 0
cd k
+
I,
Td cd k
u I
d)
8 w
2 m
d
&
4 c 0
*
ch 0
m
L
n
tj c,
a, u
CA
E W
v3 0
d
) u
I
m
OI
0
0
0

L
I l
L
LLJ I
i
I L
.
iE
a,
i m
m
I
mt
I I
t. i's
a, t
a
I 0
0
0
7"
a, i i i
m
m
m

h
ert 0
k
0
0
E Q)
*
m
m
0
k
k
or
(
cd
3 8 w2 0
0
8 8 E u
u
d)
s 0
cd 0
k
k
rl 0
d)
cd PI cd 0
Id E 0
d)
'
.
1
-cA
m
m