
TESIS FINAL 2016_15-04-2016.pdf
151
INSTITUTO POLITÉCNICO NACIONAL INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD ZACATENCO CONTROL Y MONITOREO DE TEMPERATURA MEDIANTE UN PROTOTIPO DE VÁLVULA MOTORIZADA T E S I S QUE PARA OBTENER EL TÍTULO DE: INGENIERO EN CONTROL Y AUTOMATIZACIÓN PRESENTA: JESSICA SÁNCHEZ FUENTES LUIS ALBERTO MORALES SILVA LUIS DANIEL VENCES JIMÉNEZ DIRECTORES DE TESIS: M. en C. PINO DURAN MEDINA M. en E. RICARDO HURTADO RANGEL MÉXICO D.F. MARZO 2015
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of TESIS FINAL 2016_15-04-2016.pdf

INSTITUTO POLITÉCNICO NACIONAL
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD ZACATENCO
CONTROL Y MONITOREO DE TEMPERATURA
MEDIANTE UN PROTOTIPO DE VÁLVULA
MOTORIZADA
T E S I S
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN CONTROL Y AUTOMATIZACIÓN
PRESENTA:
JESSICA SÁNCHEZ FUENTES
LUIS ALBERTO MORALES SILVA
LUIS DANIEL VENCES JIMÉNEZ
DIRECTORES DE TESIS:
M. en C. PINO DURAN MEDINA
M. en E. RICARDO HURTADO RANGEL
MÉXICO D.F. MARZO 2015


AGRADECIMIENTOS.
Al concluir un trabajo lleno de retos y dificultades como es la elaboración de una
tesis, sería demasiado egoísta de cualquier ser humano adjudicarse todos los
méritos de este logro.
La obtención de este gran triunfo hubiese sido imposible sin la participación de las
personas correctas y de mi institución, que han facilitado los medios para obtener
este gran éxito. Por ello, es para mí un honor utilizar este medio para darles mis
agradecimientos de forma justa a aquellos que lo hicieron posible y comparten
conmigo este gran final.
Debo agradecer al Instituto Politécnico Nacional y a la Escuela Superior de
Ingeniería Mecánica y Eléctrica, por haber formado mi vida educativa, gracias al
apoyo de mis profesores, que compartieron conmigo sus conocimientos y
experiencias, por sus grandes consejos y por su amistad.
A mis amigos, mis mejores amigos, Jessica, Vences y Choy, empezamos esto
juntos y lo terminamos juntos, lo logramos. Les quiero agradecer que hayan llegado
a reordenar y desordenar mi vida, porque con ustedes viví cosas que jamás me
hubiera imaginado hacer. Admiro su forma tan particular de ver la vida, su bondad,
su valentía, por ser arriesgados y romper con los esquemas, me sorprende y me
llena de felicidad lo fantástico que puede ser cada momento, por muy pequeño que
sea, estando a su lado. Lograron inmortalizar cada lugar, cada frase que solo
nosotros entendíamos, cada momento. Les agradezco que hayan entrado en mi
vida y dejarme entrar a las suyas, gracias por estar juntos en las buenas y en las
malos, porque al final de todo, nada podrá contra esta sincera y gran amistad que
durara por siempre. Gracias porque desde el momento que los conocí, nuestra
amistad se transformó en legendaria. Los amo amigos.
Quiero expresar mi agradecimiento especial a la familia Moya Silva: Esperanza,
Miguel y mis dos hermanos Miguel Ángel y Alexis Víctor; por brindarme su apoyo
incondicional, por recibirme en su familia y lograr que me sienta parte de ustedes.
Les agradezco por estar en los mejores momentos de mi vida y me hagan participe
de los suyos. Deseo que sea así por siempre, porque de alguna u otra manera,
siempre estaremos juntos, protegidos por ese gran ángel quién siempre estará en
nuestra mente y en nuestros corazones. Tía Pera, esto va para usted de parte de
Alex y mía.
Le agradezco a mi prima Diana, por enseñarme que con esfuerzo y dedicación todo
se puede alcanzar, que no existen imposibles y que todos los sueños pueden
hacerse realidad.
Y, por supuesto, el agradecimiento más profundo y sentido va para mi familia. Solo
quiero que entiendan que el logro mío, es el logro de ustedes, que mi esfuerzo está
inspirado en ustedes, y que mi único ideal son ustedes. Sin su apoyo, colaboración
e inspiración habría sido imposible llevar a cabo este logro, nuestro logro.
A mi madre, Socorro Silva, por su ejemplo de honestidad, honradez y entrega;
Gracias mamá por preocuparte por mi cada día, por despertarte conmigo todas las
mañanas y no dormir hasta que yo llegara a casa, por estar a mi lado en cada
instante, por saber identificar mis sentimientos, mis problemas y mis anhelos, y
darme tus sabios consejos cuando más los necesito.
A mi padre, Luis Morales, por su gran ejemplo de lucha, por siempre encontrar una
solución a cada circunstancia, que pese a todo lo que pase ha sabido salir adelante
y siempre con más fuerza; Gracias papá por ser mi ejemplo de vida, por ser la
persona en la que cada día me quiero convertir.
Gracias a ambos, por entregarme su vida sin nunca esperar nada a cambio, porque
cada día que me veían realizar mis tareas y trabajos me preguntaban si podrían

ayudarme, cuando sabíamos que estaban más confundidos que yo. Papás los amo,
los admiro, los respeto y siempre estaré orgulloso de ustedes.
A mi pequeña hermana, Ximena, por su tenacidad, su inteligencia y generosidad,
por enseñarme a ser una persona valiente, porque pese a todo sé que siempre
estarás a mi lado y sé que cuento con tu gran apoyo así como tú sabes que cuentas
conmigo, mi gran cómplice.
Finalmente y no por ello menos importante, quiero hacer una dedicatoria y un
agradecimiento especial a mis abuelos Don Victor y Doña Lala, por ser los pilares
de esta gran familia. A mi tía Rosa, a Donis y a Alexis, esto es por ustedes y para
ustedes.
Gracias a todos y a cada uno de ustedes.
Luis Alberto Morales Silva.

En la vida, todos tenemos una misión, objetivos por alcanzar, lugares por descubrir,
personas con quien compartir. Ahora, que termina un ciclo importante en mi vida,
que es mi formación académica, quiero agradecer a todos mis seres queridos que
siempre me han dado toda la fortaleza, energía y valor para concluir esta etapa con
el trabajo final que lo representa realmente.
A mi mamá Alma, mi Alma. Nací de tu cuerpo, soy parte de ti, sabes que te amo y
agradezco todos los castigos, regaños, risas y tonterías. Gracias por abrazarme por
difícil que sea para ti cuanto me estoy derrumbando por dentro, porque ahora no le
tengo miedo a nada ni nadie, porque nosotros decidimos si preocuparnos u
ocuparnos, por salir adelante sin pensar en la gravedad de los problemas, pero
siempre juntos.
A mi mamá Estela, el ángel más grande en mi cielo, la persona que más amor me
dio en forma de abrazos, besos, cuidado y atenciones, siempre tan orgullosa de mí,
siempre consintiéndome y cuidándome como su bebé pequeña, no puedo ser más
feliz en la vida porque tuve el honor de ser su nieta y su hija a la vez. Te extraño
más de lo que puedo expresar, te agradezco más que a cualquier persona porque
me protegiste hasta el último instante y gracias a ti estoy aquí el día de hoy, en esta
oportunidad que no desperdiciaré y sé que estas junto a mi donde sea que vaya
guiándome, levantándome y disfrutando con nosotros. Nos volveremos a encontrar
y está vez será para siempre.
A mi papá Germán, el hombre de mi vida, a quien más me gusta abrazar y molestar.
Gracias por ayudarme a entender que el esfuerzo vale la pena cuando te gusta lo
que haces, que no necesitas tenerlo todo para ser feliz, que compartir es lo más
importante cuando lo haces con las personas que amas, que todo el esfuerzo tiene
su recompensa y que la solución a los problemas está en nosotros mismos. Por
dejarme hacer lo que quiero aunque mi mamá se enoje, por la paciencia y el amor
que le tienes. Te amo demasiado.

A mi padre José María, gracias por educarme y mostrarme que los valores de una
persona son las armas para construir una fortaleza indestructible, me da tanta
emoción saber que siempre se ha sentido tan orgulloso de mí, y poder seguir
dándole grandes satisfacciones. Abuelito, saldremos adelante y siempre estaré para
ayudarlo a levantarse y continuar, así como usted lo ha hecho conmigo toda la vida.
Cuando esté arriba, lo llevaré conmigo para disfrutar de todos los frutos de este gran
esfuerzo porque mucho es gracias a usted papá.
Abuelito Aurelio, ¡lo logré! Sé que ha estado todo este tiempo con nosotros, gracias
por todo, por ayudarnos siempre y consentirnos tanto. Abuelita Alma, gracias por
curarme siempre de todos mis males físicos y emocionales: bailar, reír, cocinar,
comer y ser muy felices, algún día nos iremos a nuestro viaje juntas.
A mis hermanos: Mari, sabes que te debo la vida a ti, siempre me has salvado, me
secas mis lágrimas cuando tengo el corazón roto y me dices mil tonterías para reír
como locas, no hay día en que no te extrañe junto a mí, pero estoy tan agradecida
por haberme dado el mejor regalo, que es ser tía. Gracias por ser mi hermana y
gracias por ser mi mejor amiga. Te amo mi Josesita. Sofía, te amo y sé que serás
la mejor, tu tía siempre te cuidará.
Germán, sabes que siempre te amaré por ser el bebé, aunque me enoje mucho
contigo soy feliz porque estas a mi lado, sé que estás orgulloso de mí y soy tu
ejemplo, y lograremos que tú me superes en todo aspecto, pero juntos, gracias por
nunca dejarme caer, por abrazarme cuando lo necesito y apoyarme cuando todo
parece caer. Te amo mi Germencho.
A la familia Sánchez Cano, mis tíos y mis hermanos, cada uno de ustedes tiene un
agradecimiento especial por siempre confiar, en mí, apoyarnos en los momentos
más difíciles, es increíble disfrutar cada momento de la vida juntos.

Luis, Vences y Choy, gracias en verdad por tantas emociones, realmente pude ser
yo misma sin pena ni miedo, logramos cada meta juntos, vivimos cosas inolvidables
y sé que aún nos falta mucho más, todo al final se acomoda para que suceda de la
mejor forma posible, gracias por cada desvelo, cada risa, cada regaño, cada enojo,
en que nos damos cuenta que se siente increíble tener compañeros de vida. Estoy
orgullosa de ustedes colegas, y vamos por más.
Por último, al Instituto Politécnico Nacional por abrirme las puertas y la mente,
gracias porque en las aulas aprendí mucho de los profesores, de cada clase
impartida, de cada trabajo importante, pero sobre todo las personas con las que me
crucé, que dejan una huella importante, porque nos ofrece las armas para luchar en
la vida.
Jessica Sánchez Fuentes.

Este trabajo de tesis es la culminación de años de estudio y esfuerzos tanto de parte
de mi como de mi familia, es por eso que a ellos dedico este trabajo; sólo quiero
decirles que todos y cada uno de ustedes han influido en mí y lo seguirán haciendo
a lo largo de mi vida, doy gracias a dios de tenerlos a mi lado.
Para mis padres, las dos personas que más amo en este mundo y las que me han
apoyado para lograr todas mis metas, ellos me dieron la educación y todo ese amor
con el que crecí.
Mi madre, el corazón de mi casa, las palabras no alcanzan para describir cuanto la
quiero y cuanto agradezco todo lo que ha hecho por mí y por mis hermanos. A esa
persona tan pero tan luchona que me trajo a raya desde chico con amor y
chanclazos, me enseñó a trabajar duro, a no rendirme, el valor de la familia, a
siempre divertirme sin importar lo que digan, a no olvidar de dónde vengo y lo más
importante que el amor es la cosa más bonita y fuerte que puede existir. Porque te
quiero con todo mi corazón, te amo mamá. Y vámonos riquis que todavía nos falta
mucho camino!
Mi padre, la cabeza de mi casa, aunque no nos lo digamos mucho, quiero que sepas
que te quiero muchísimo, más de lo que crees y yo sé que tú a mí; mucha parte de
mi éxito te la debo a ti, a tu deseo por aprender siempre cosas nuevas, esto fue algo
que me acompaño en toda mi carrera y me ha ayudado en muchas partes de mi
vida, como dices: “lo ingeniero ya lo llevas dentro” y bueno que más puedo decirte
si salí de la misma escuela en la que ibas, y ese orgullo que tanto me decías de tu
escuela, ahora lo entiendo y bueno otra cosa que me enseñaste mucho es a no ser
codicioso con el dinero, Te amo pa.
Mis hermanos los primeros amigos que tuve: Ale, el robot, el primero de todos y el
que ha sido nuestro ejemplo a seguir, siempre me cuida y me regaña (aún lo hace),
Char, el negro sandia, mi compañero de cuarto y con el que convivo más, el que
sacó el corazón de mi mamá aunque luego se le aloca la canica, Yayi el chistoso de
la familia, y que a pesar de sus deseos de ser boxeador se está rifando en la
escuela, es como el más chiquito de nosotros, Susi la longaniza y la primera niña,
se cree ruda pero es medio sentimental y aunque a veces es un poquito enojona
me llevo chido con ella y la cuidamos mucho, por último los chiquitos: Mario, Abril,
Gaby y Matías espero logren lo todo lo que se proponen porque les queda mucho
camino por recorrer, siempre estaremos ahí apoyándolos.
Mis tíos que son como mis padres, chiquis mi segunda madre que nos ha apoyado
tanto y en tantas cosas, a mi principalmente con lo escolar cuando era chiquito, nos
cuida mucho como si fuéramos sus hijos, tan chistosa como siempre, la queremos
mucho; Tato que también es como mi segundo padre con un toque de hermano
mayor, nos ha cuidado siempre a toda la familia y aunque me hubiera gustado que
nos emparejáramos más con él en cuanto a la edad me alegra haberlo tenido como
el hermano mayor, mi tío Charly que igual nos ha cuidado mucho, él es un poco más
rudo y aunque a veces es un poco distante sé que nos quiere y lo queremos mucho,
mi abuelita que es el sostén de toda la familia, siempre preocupándose por todos
con sus actos altruistas ayudándonos todo lo que puede, espero estés orgullosa de
tu familia.
Otros que no pueden faltar son mis amigos, a lo largo de toda mi trayectoria escolar
tuve muchos, algunos buenos y algunos malos, al final como dicen, se terminan
contando con los dedos y así fue me quedé con tres que son: Jessica, Luis y Choy,
con ellos compartí cosas maravillosas y puedo decir que son la mejor parte de mi
juventud, son mis mejores amigos y trataré de conservarlos por siempre, los quiero
mucho. Lo más importante de los amigos es que por un tiempo se vuelven parte de
tu familia ya que a veces terminas conviviendo más tiempo con ellos de lo que te
imaginas, tantas risas, llanto, alegrías, peleas, trabajos, fiestas, tonterías etc. se
quedan en tu memoria por siempre y aunque nuestros caminos probablemente se
distanciarán más, sé que no nos dejaremos de ver.

Y por último, los profesores todos aquellos que tuve, siempre habrá de todo tipo: el
rifado, el barco, el flojo etc. y de todos ellos aprendes algo pero sean como sean
siempre tienes que hallar la forma de pasar sus materias y superarlos, muchas
veces las cosas que enseñan se te quedan por siempre y también encuentras
muchos ejemplos a seguir, sobre todo en la universidad maestros muy buenos y
que muchas veces tienen un pensamiento excelente acerca de las cosas, todos
ellos los que te ayudan a ver más allá del horizonte, muchas gracias.
A todos ustedes les dedico este trabajo, el cual no significa únicamente la
terminación de mis estudios universitarios ni la transición de mi vida estudiantil a
una vida laboral, les dedico este trabajo que significa todos los recursos,
experiencias, dolencias, y felicidad que pasaron y se fueron apilando hasta lograr
esté trabajo que da por terminada mi carrera universitaria en la mejor carrera:
Ingeniería en Control y Automatización, de la mejor escuela que pude haber
escogido el Instituto Politécnico Nacional.
Luis Daniel Vences Jiménez.

CONTENIDO
DESCRIPCIÓN DEL PROBLEMA.............................................................................................................. I
OBJETIVOS. .......................................................................................................................................... II
JUSTIFICACIÓN. .................................................................................................................................. III
ALCANCE. ............................................................................................................................................. V
CAPÍTULO I: ANTECEDENTES ............................................................................................................... 1
1.1.- ENERGÍA SOLAR....................................................................................................................... 2
1.1.1 La investigación solar en México. ....................................................................................... 2
1.1.2 Energía solar térmica. ......................................................................................................... 5
1.2 COLECTORES SOLARES. ............................................................................................................. 6
1.2.1 Tipos de colectores............................................................................................................. 7
1.2.2 Concentradores solares de disco parabólico reflector. ..................................................... 8
1.3 CASO DE ESTUDIO ESPECÍFICO. ............................................................................................... 10
1.4 ALGORITMOS DE CONTROL. .................................................................................................... 11
1.5 ESTRATEGIAS DE CONTROL. ................................................................................................... 20
1.6 FLUIDO DE TRABAJO, EQUIPO E INSTRUMENTACIÓN. ........................................................... 23
1.6.1 Fluido de trabajo. ............................................................................................................. 24
1.6.2 Equipo de trabajo. ............................................................................................................ 24
1.6.3 Instrumentación. .............................................................................................................. 25
CAPÍTULO II: DISEÑO Y PROPUESTA DE CONTROL. ........................................................................... 30
2.1 FILOSOFÍA DE OPERACIÓN. ..................................................................................................... 31
2.1.1 Proceso manual. ............................................................................................................... 34
2.2 PROPUESTA DE INGENIERÍA. ................................................................................................... 35
2.2.1 Diseño del sistema de control. ......................................................................................... 35
2.3 VARIABLE MANIPULADA Y VARIABLE CONTROLADA. ............................................................. 38
2.4 INSTRUMENTACIÓN REQUERIDA. ........................................................................................... 43
2.5 CONSTRUCCIÓN DELPROTOTIPO DE VÁLVULA. ...................................................................... 46
2.5.1.- Diseño de prototipo de válvula. ..................................................................................... 46
2.5.1.- Construcción delprototipo de válvula. ........................................................................... 52
2.6.- DESARROLLO DE LA ESTRATEGIA DE CONTROL. ................................................................... 53

2.6.1 Adquisición de datos. ....................................................................................................... 53
2.6.2.- Programación en Labview® para control del prototipo de válvula. ............................... 56
2.6.3.- Diagrama de conexiones para adquisición de datos y etapa de potencia. .................... 66
2.6.4.- Interfaz humano máquina (HMI). .................................................................................. 67
CAPÍTULO III: RESULTADOS Y OBSERVACIONES. ............................................................................... 70
3.1 OBTENCIÓN DE RESULTADOS. ................................................................................................. 71
3.2MEDICIONES DEL POTENCIÓMETRO. ....................................................................................... 71
3.3LECTURA DE SEÑALES ANALÓGICAS EN ARDUINO® Y LABVIEW®. ........................................... 72
3.3.1 Medición y ajuste del potenciómetro respecto a la válvula. ........................................... 76
3.4MEDICIÓN DEL FLUJO DEL PROTOTIPO DE VÁLVULA EN PROCESO. ..................................... 78
3.5MONTAJE DE LA SERVO VÁLVULA EN EL PROCESO. ................................................................ 79
CAPÍTULO IV: ANÁLISIS DE COSTOS Y BENEFICIOS. ........................................................................... 83
4.1 Comparación de costos. .......................................................................................................... 84
4.2IMPACTO ECONÓMICO SOCIAL Y AMBIENTAL. ....................................................................... 92
4.2.1 Impacto económico. ......................................................................................................... 92
4.3 IMPACTO AMBIENTAL ............................................................................................................. 96
4.3.1 Inversión y rentabilidad. ................................................................................................... 99
CONCLUSIONES ............................................................................................................................... 102
ÍNDICE DE FIGURAS ......................................................................................................................... 104
ÍNDICE DE TABLAS. .......................................................................................................................... 106
BIBLIOGRAFÍA .................................................................................................................................. 107
APÉNDICE A: ESPECIFICACIONES ..................................................................................................... 109
APÉNDICE B: PLANOS ...................................................................................................................... 124
APÉNDICE C: MAQUILADO .............................................................................................................. 130

I
DESCRIPCIÓN DEL PROBLEMA.
En la Sección de Estudios de Posgrado e Investigación de la Escuela Superior de
Ingeniería Mecánica y Eléctrica (ESIME) del Instituto Politécnico Nacional, se está
realizando un prototipo de energías renovables, el cual consiste en el
aprovechamiento de la radiación solar por medio de un colector solar sustentable.
Este prototipo no cuenta con una correcta medición de temperatura dentro del
sistema, ya que las lecturas se obtienen con un termómetro de mercurio; basándose
en estos datos incorrectos, el operador realiza la regulación manual del flujo del
fluido de trabajo para la obtención de la temperatura requerida a base del
conocimiento empírico del operador, por lo cual el proceso es impreciso porque el
operador no puede alcanzar la temperatura deseada fácilmente.
.

II
OBJETIVOS.
OBJETIVOS GENERALES.
Lograr el monitoreo y control de la temperatura del fluido de trabajo para un
intercambiador de calor a través de la manipulación del flujo mediante un prototipo
de válvula controlada a través de una HMI (Interfaz Humano Máquina).
OBJETIVOS ESPECÍFICOS.
Diseñar, construir e implementar un prototipo de válvula.
Controlar el porcentaje de apertura del prototipo de válvula.
Mantener la temperatura dentro del rango de operación requerida en el proceso.
Elaborar la interfaz de usuario para el proceso
III
JUSTIFICACIÓN.
Las energías renovables ofrecen la oportunidad de obtener energía útil para
diversas aplicaciones, su aprovechamiento tiene menores impactos ambientales
que el de las fuentes convencionales y poseen el potencial para satisfacer todas
nuestras necesidades de energía presentes y futuras. Además, su utilización
contribuye a conservar los recursos energéticos no renovables y propicia el
desarrollo regional. (Glyn, 2010).
Se pretende utilizar como energía renovable la radiación solar captada en el colector
solar para el calentamiento de un fluido de trabajo. Este fluido deberá ser capaz de
soportar altas temperaturas sin alterar sus propiedades y funcionar como medio de
calentamiento de agua usando un equipo de transferencia de calor en industrias,
pequeñas empresas o establecimientos como hospitales, departamentos, centros
comerciales, etc. Utilizando este método se disminuyen los costos a largo plazo, se
realiza el control exacto para la temperatura deseada en el intercambiador de calor,
además de ser amigable con el medio ambiente.
El proceso requiere de rangos específicos de operación de temperatura
dependiendo de su demanda y aplicación, por lo tanto se aplicará un control de
temperatura utilizando elementos de medición y control adecuados para este
proceso.
La temperatura del fluido del proceso es una variable dependiente del flujo, la
regulación de este se realiza mediante una válvula manual de forma imprecisa, con
base en los datos obtenidos por el medidor de flujo se instalará un prototipo de
válvula para el control de este.

IV
Es preciso decir que la obtención de datos de las variables de proceso están sujetas
al conocimiento experimental del operador, es por eso que para el monitoreo y
establecimiento de los parámetros de estas dos variables se implementará una
interfaz humano-máquina (HMI) desde una estación remota. Siendo esta la forma
más práctica de condicionar la respuesta del sistema.
Por otra parte, el prototipo del proyecto en general es capaz de adaptarse a futuros
trabajos de investigación, como medio de evaluación sencillo y rápido.

V
ALCANCE.
Se realizará el control de la temperatura a partir de la regulación de flujo solamente
en el fluido de trabajo de acuerdo a sus características y del sistema, pero no
comprende la manipulación del fluido del proceso, es decir, no se conoce que
intercambiador se utilizará ni bajo qué condiciones se seleccionará.
Los datos obtenidos del flujo del fluido sólo se monitorearán para verificar que el
rango sea el correcto, pero para el control de las variables ésta medición es
despreciable, ya que el flujo se manipula por medio de la válvula de control.
Diseñar una HMI para obtener el control y monitoreo remoto del flujo y temperatura
por medio de la computadora.
Se realizará un sistema de seguridad para el prototipo de válvula, más no en el
proceso.

CAPÍTULO I: ANTECEDENTES

2
1.1.- ENERGÍA SOLAR.
La energía solar es la energía radiante producida en el Sol como resultado de
reacciones nucleares de fusión que llegan a la tierra a través del espacio. La energía
radiante procedente del Sol proporciona excedentes de calor que superan con
creces el suministro actual de energía. La Tierra recibe del Sol diariamente
alrededor de1,74 × 1017 W, lo que supone anualmente 4500 veces del consumo
mundial de energía.(ANES, 2014).
1.1.1 La investigación solar en México.
Nuestro país tiene algunas regiones (Sonora y Baja California) con el promedio de
radiación más alto del planeta. Estas zonas coinciden con los desiertos que se
hallan alrededor de los trópicos de Cáncer y de Capricornio, y en ellas pueden
construirse centrales de energía solar para satisfacer la demanda que requiere
nuestro país. Además, como en las zonas desérticas el suelo es poco productivo y
el clima contribuye a que no se habiten, son las más apropiadas para construir
plantas solares de varias decenas de MW de potencia.
Hoy en día, la energía solar no contribuye significativamente a satisfacer las
necesidades nacionales de energía. Según algunas fuentes(ANES, 2014), en 1985
el petróleo y el gas natural ocupaban el primer lugar, con el 90.46% del total de la
demanda de energía. En segundo lugar se encontraba la biomasa, con el 4.6%; la
energía hidroeléctrica contribuía con el 3.3%; después seguía el carbón, con el 1.5%
y, finalmente, la energía geotérmica con el 0.2%. Por otro lado, cabe mencionar que
más de 20% de la población rural no tiene acceso a la energía eléctrica.

3
El promedio diario de energía solar que llega a la República Mexicana es 5.5
kWh/m² (Figura 1.1). La utilización de la energía solar se ha probado con éxito como
alternativa para satisfacer las necesidades de electricidad en las comunidades
rurales. También se ha usado ampliamente en la vivienda. Cabe destacar el hecho
de que una casa puede ser autosuficiente, en lo que respecta al consumo externo
de energía, si se emplean algunos dispositivos solares y si la arquitectura de la
vivienda está diseñada para que el clima esté controlado naturalmente con diversos
sistemas solares llamados pasivos. De lo anterior se desprende que el uso de la
energía solar contribuye a eliminar nuestra dependencia de los energéticos y a la
descentralización energética.(Tonda, 2009).
Figura 1. 1Insolación anual en la República Mexicana.

4
Entre los beneficios de la energía solar se encuentran ser una energía renovable,
gratuita e inagotable. La energía solar implica un suministro seguro que mejora el
sector de desarrollo medio ambiental, superación de las fluctuaciones del precio del
petróleo, suministro de agua limpia, mitigación del cambio climático, y la común
creencia según la cual <<no habrá necesidad de guerras a causa de la energía
solar>>(Romero, 2009).
Los inconvenientes de la energía solar se manifiestan en la radiación que llega a la
tierra de forma dispersa, intermitente (disponible únicamente durante las horas del
día) e inadecuadamente distribuida sobre la superficie terrestre. Existen sin
embargo, diversas tecnologías que pueden superar estas dificultades y hacer que
la energía solar sea útil para todos los propósitos.
Las dos principales desventajas del uso de la energía solar son, en primer lugar, el
costo elevado de los sistemas solares, en comparación con los convencionales y,
en segundo lugar, el mantenimiento de los sistemas solares. Es necesario crear
sistemas de almacenamiento de energía solar que sean poco costosos, sencillos,
eficientes y duraderos.
Sin embargo, estas desventajas pueden ser controladas por la investigación básica
y aplicada que se realice en México. En la Tabla 0.1 se resume la investigación solar
que se lleva a cabo en nuestro país. El futuro de la energía solar depende de estas
investigaciones; por mencionar sólo un ejemplo del avance logrado, en los últimos
seis años el costo de las celdas solares ha disminuido en un factor de diez.

5
Tabla 1. 1 Investigación solar en la República Mexicana
Sistema Lugar donde se investiga
Colectores planos Instituto de Ingeniería de la UNAM, Instituto de
Investigaciones en Materiales de la UNAM,
Instituto Politécnico Nacional; Instituto de
Investigaciones Eléctricas; varias universidades
e institutos en toda la República; fábricas de
calentadores solares en el D.F., Guadalajara,
Cuernavaca y Sinaloa, CFE y la Secretaría de
Agricultura y Recursos Hidráulicos.
Colectores evacuados Instituto de Investigaciones en Materiales de
la UNAM.
Colectores de concentración Instituto de Ingeniería de la UNAM e Instituto de
Investigaciones Eléctricas
Estanques solares Instituto de Investigaciones Eléctricas (en
Palmira, Morelos); Sosa-Texcoco;Fertimex e
Instituto de Ingeniería de la UNAM.
Celdas solares Instituto de Investigaciones en Materiales de
la UNAM, Centro de Investigación y estudios
Avanzados del IPN, el IPN y el IIE.
Podemos diferenciar básicamente dos formas de aprovechamiento de la energía
solar: térmica y fotovoltaica. El presente trabajo se enfocará únicamente en la parte
de la energía solar térmica.(Romero, 2009)
1.1.2 Energía solar térmica.
Se le denomina energía solar térmica a la transformación de la radiación solar en
calor. La energía solar térmica designa todas las tecnologías que, utilizando como
fuente la radiación del Sol, transforman su energía en calor utilizable para satisfacer
6
directamente cualquier necesidad calorífica (calentamiento del aire, del agua y
enfriamiento del aire), para producir electricidad, combustibles, agua caliente
destinada al consumo doméstico (calentamiento de piscinas, agua caliente
sanitaria, calefacción, refrigeración por absorción). Además, podrían incluirse las
tecnologías que concentran la energía solar, y otros conceptos como las centrales
de torre y la energía térmica de los océanos. A estas tecnologías también se les
llaman sistemas foto térmicos. El calor también puede utilizarse para producir
energía mecánica mediante un ciclo termodinámico y, a través de un alternador,
generar energía eléctrica: es la denominada energía solar termoeléctrica.(Rufes,
2009).
Se utiliza la energía solar como medio de obtención de energía calorífica debido a
que, cualquier cuerpo expuesto directa o indirectamente a la radiación solar
aumenta su temperatura. Sin embargo, en los últimos años se ha incrementado el
desarrollo de la tecnología solar térmica(Rufes, 2009) Y se puede aprovechar de
forma más eficiente. Los últimos avances en este campo, han dado lugar a diversos
sistemas fotos térmicas tales como los colectores cilindros parabólicos, las torres
solares de concentración, y las placas solares térmicas con alto rendimiento y bajos
problemas de mantenimiento.
1.2 COLECTORES SOLARES.
Un colector solar es un sistema foto térmico capaz de utilizar la energía térmica del
sol para el calentamiento de algún material sin usar ningún tipo de combustible.
Se compone de: un elemento colector o concentrador solar, donde se captura la
energía del sol y se transfiere al agua; un termo tanque, donde se almacena el agua
caliente; un sistema de tuberías por donde circula el agua; el sistema de
intercambio, donde se transfiere la energía a otro liquido; y el sistema eléctrico y de
control.

7
El Factor de planta mide el grado de utilización de la capacidad efectiva de una
central eléctrica, en el cual estos sistemas térmicos alcanzan entre 24% y 50% de
capacidad, mientras que la eficiencia de conversión de energía, es decir la relación
entre la cantidad de energía captada y la cantidad de energía transferida, se
encuentra normalmente entre 40% a 65% [Transenergie, 2011], pero puede ser aún
mayor, dependiendo en gran parte de las condiciones de trabajo de los equipos,
como nivel de radiación y diferencia de temperatura entre el ambiente y el colector.
En ciudades con baja temperatura, están provistos de anticongelantes que evitan
que el agua se congele dentro del colector solar plano.
1.2.1 Tipos de colectores.
Los colectores de energía solar son tipos especiales de intercambiadores de calor
que transforman la energía proveniente de la radiación solar en energía interna de
algún medio físico para posteriormente transportarla a un fluido de trabajo. El
principal componente de cualquier sistema solar es el colector solar, siendo éste el
dispositivo que absorbe la radiación solar incidente y posteriormente la transfiere en
forma de flujo de calor a un fluido de trabajo (usualmente aire, agua o aceite) el cual
fluye a través del colector. Los colectores solares pueden clasificarse de tres formas
distintas; por su movimiento, por su temperatura de operación, o por el tipo de
absorción (Tonda, 2003).
Por su tipo de movimiento pueden ser estacionarios o con seguimiento solar ya sea
de uno o dos ejes. Por su temperatura de operación se clasifican en de baja
temperatura (30 – 60°C), de mediana temperatura (65 – 200°C) y de alta
temperatura (250 – 2000°C). Por el tipo de absorbente se clasifican en planos o de
concentración, estos últimos se dividen en tubulares o focales. En la Tabla 0.2 se
muestra la clasificación de los diferentes colectores solares.

8
Tabla 1. 2Características de calefactores solares.
Movimiento Tipo de colector Tipo de absorbedor
Relación de concentración
Rango de temperatura
(°C)
Estacionario
Colector plano FPC (Flat-platecollector)
Plano 1 30-80
Tubo evacuado ETC (Evacuatedtubecollector)
Plano 2 50-200
Parabólico compuesto CPC(Compoundparaboliccollector)
Tubular
1-5 60-240
5-15 60-300
Seguimiento solar en 1
eje
Reflector Fresnel LFR (Linear Fresnel reflector)
Tubular 10-40 60-250
Cilíndrico CTC (Cylindrical trough collector) Tubular 15-50 60-300
Canal parabólico PTC (Parabolic trough collector)
Tubular 10-85 60-400
Seguimiento solar en 2
ejes
Disco parabólico reflector PDR Focal 600-2000 100-1500
Heliostato HFC (Heliostat field collector)
Focal 300-1500 150-2000
1.2.2 Concentradores solares de disco parabólico reflector.
Dentro de los colectores de concentración focal se encuentran los de disco
parabólico reflector (PDR por sus siglas en inglés). Estos colectores se conforman
principalmente por un disco parabólico cuya superficie se encuentra cubierta por un
material reflejante que dirige los rayos solares hacia una superficie absorbente,

9
también llamada punto focal, localizado en el eje focal de la parábola. La energía
calorífica concentrada en este punto es transmitida a un fluido de trabajo por
conducción y convección, estos procesos de intercambio de calor se llevan a cabo
dentro de un módulo de almacenamiento de energía.
Los colectores PDR cuentan con un mecanismo de seguimiento solar en dos ejes
(altitud y acimut) y pueden ser conectados a una red eléctrica en un esquema
distribuido de generación de energía como sistemas autónomos, resultando
particularmente interesantes para aplicaciones productivas, como el bombeo de
agua, la producción de frío, la desalación de agua, y el abastecimiento de pequeñas
redes eléctricas no interconectadas (IIE, 2007).
Figura 1. 2Diagrama esquemático del receptor solar.
Dependiendo de la aplicación, puede variar el tamaño, la forma parabólica del disco,
los materiales reflejantes, el fluido de trabajo, las estructuras de soporte tanto del
disco como del punto focal y el mecanismo de seguimiento solar así como su técnica
de control.
10
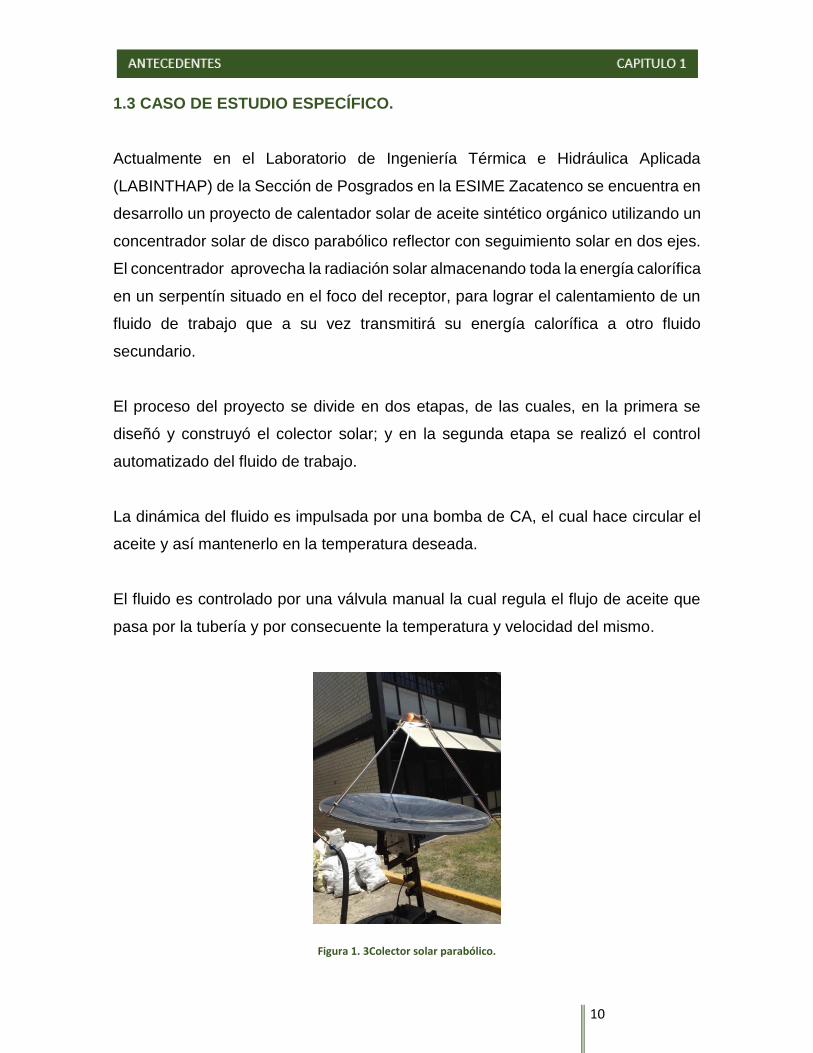
1.3 CASO DE ESTUDIO ESPECÍFICO.
Actualmente en el Laboratorio de Ingeniería Térmica e Hidráulica Aplicada
(LABINTHAP) de la Sección de Posgrados en la ESIME Zacatenco se encuentra en
desarrollo un proyecto de calentador solar de aceite sintético orgánico utilizando un
concentrador solar de disco parabólico reflector con seguimiento solar en dos ejes.
El concentrador aprovecha la radiación solar almacenando toda la energía calorífica
en un serpentín situado en el foco del receptor, para lograr el calentamiento de un
fluido de trabajo que a su vez transmitirá su energía calorífica a otro fluido
secundario.
El proceso del proyecto se divide en dos etapas, de las cuales, en la primera se
diseñó y construyó el colector solar; y en la segunda etapa se realizó el control
automatizado del fluido de trabajo.
La dinámica del fluido es impulsada por una bomba de CA, el cual hace circular el
aceite y así mantenerlo en la temperatura deseada.
El fluido es controlado por una válvula manual la cual regula el flujo de aceite que
pasa por la tubería y por consecuente la temperatura y velocidad del mismo.
Figura 1. 3Colector solar parabólico.

11
El fluido de trabajo que se optó para este proyecto es un fluido sintético orgánico
DI-TRI ARIL. Compuesto (THERMOLLIN M) que debido a sus características es la
opción adecuada, ya que puede alcanzar altos niveles de temperatura antes de
llegar a su punto de evaporación. El líquido es orgánico ya que como se mencionó
una de las prioridades del proyecto es ser amigables con el medio ambiente.
Figura 1. 4Tanque de almacenamiento del aceite sintético orgánico.
1.4 ALGORITMOS DE CONTROL.
Un problema de control al que es posible atender de forma alternativa o combinada
es el llamado problema de regulación en el que como se sabe la respuesta del
sistema viene motivada por una perturbación externa que saca momentánea y
permanentemente a dicho sistema de su punto de equilibrio. Se intenta ahora que
el sistema vuelva al estado del que le hizo salir esa entrada pero con unas ciertas
especificaciones.
En cualquiera de estos casos, el elemento auxiliar capaz de resolver la situación es
el llamado regulador o también controlador. En el caso del dominio continuo el tipo

12
más utilizado es el llamado regulador proporcional, derivativo e integral, de forma
abreviada PID. Hay estimaciones según las cuales el 90% de los bucles cerrados
implementados en la industria utilizan una u otra forma o variante de este tipo de
regulador.(Cuenca, 2012).
Controlador proporcional.
En el sistema de posición proporcional existe una relación lineal continua entre el
valor de la variable controlada y la posición del elemento final de control. Es decir,
la válvula se mueve el mismo valor por cada unidad de desviación. O, en otras
palabras, la posición de la válvula es una acción inversa de la variable controlada.
(Solé, 1997)
El controlador Proporcional es en realidad un amplificador con ganancia ajustable.
Reduce el error en estado estable.
La conexión física directa entre el error y la acción de control produce una
respuesta rápida y estable.
Los sistemas con acción de control proporcional al introducirles una
perturbación sostenida (rampa) nunca llevan la variable controlada al valor
deseado, se produce un error en estado estable (OFF-SET).
Incrementa el sobre impulso.
(Enríquez, 2007)
Tiene una salida 𝑢 proporcional a su entrada 𝑒, esto es 𝑒 = 𝐾𝑝𝑒, en donde 𝐾𝑝 es
una constante de proporcionalidad.
(Sánchez, 2011)

13
Se observan los hechos característicos cuando aumenta la ganancia 𝐾𝑝 del
controlador.
Figura 1. 5Acción Proporcional en un Controlador.
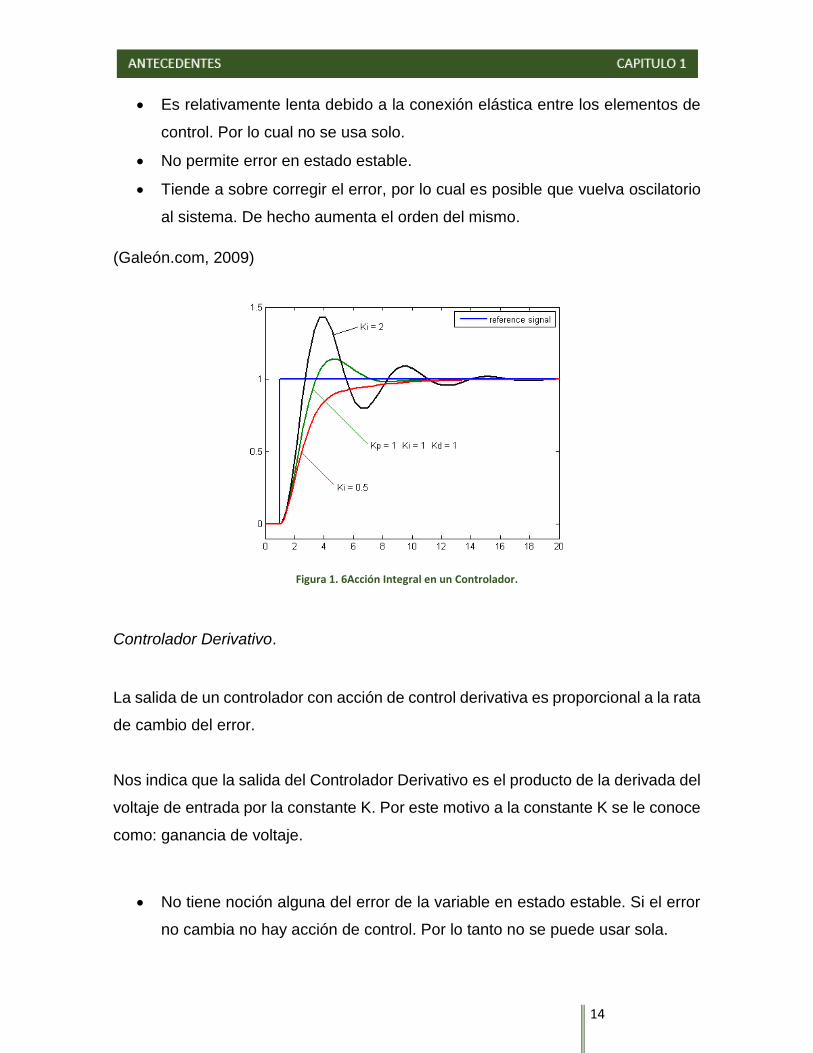
Controlador Integral.
El controlador integral tiene una salida que es proporcional a la integral del error. En
otras palabras la velocidad de la salida del controlador es proporcional al error o la
taza de cambio de la salida del controlador es proporcional al error. Por lo cual la
tendencia es a minimizar el error.En una acción de control integral, la rapidez de
cambio en la respuesta del controlador, m(t) es proporcional al error, e(t).
El tiempo integral ajusta la acción de control integral, mientras que un cambio en el
valor de Kc afecta las partes integral y proporcional de la acción de control. El
inverso del tiempo integral se denomina velocidad de reajuste. La velocidad de
reajuste es la cantidad de veces por minuto que se duplica la parte proporcional de
la acción de control. La velocidad de reajuste se mide en términos de las
repeticiones por minuto.
14
Es relativamente lenta debido a la conexión elástica entre los elementos de
control. Por lo cual no se usa solo.
No permite error en estado estable.
Tiende a sobre corregir el error, por lo cual es posible que vuelva oscilatorio
al sistema. De hecho aumenta el orden del mismo.
(Galeón.com, 2009)
Figura 1. 6Acción Integral en un Controlador.
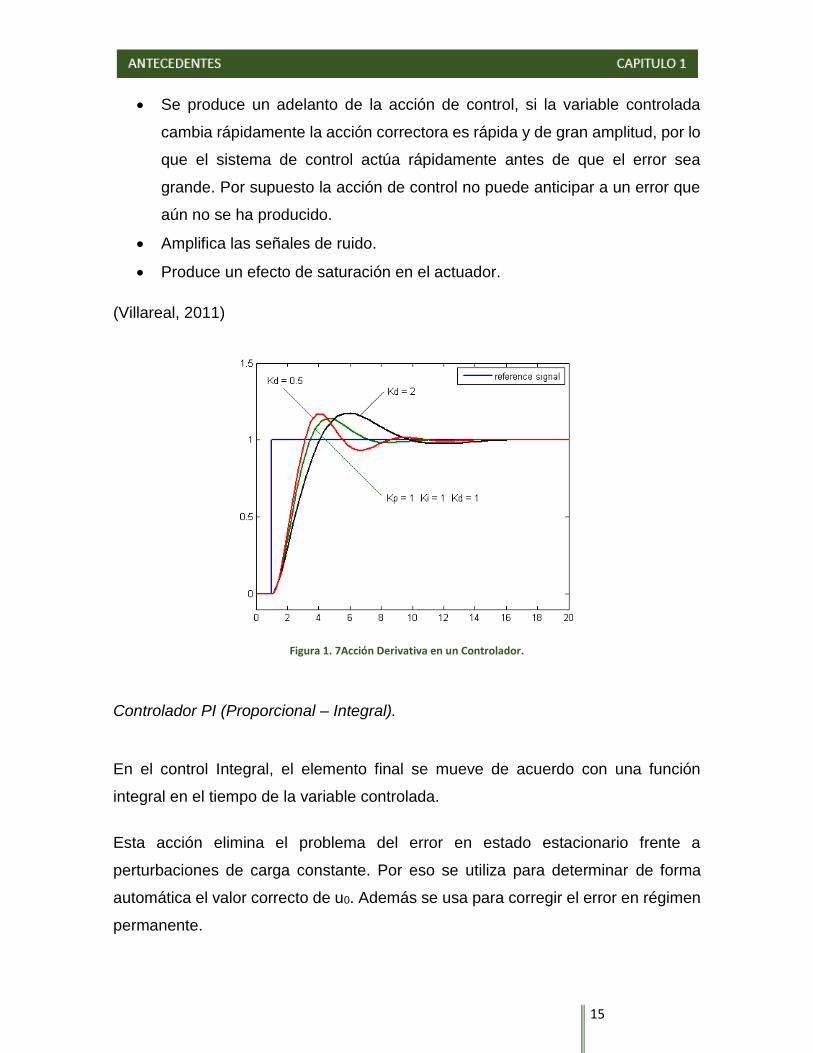
Controlador Derivativo.
La salida de un controlador con acción de control derivativa es proporcional a la rata
de cambio del error.
Nos indica que la salida del Controlador Derivativo es el producto de la derivada del
voltaje de entrada por la constante K. Por este motivo a la constante K se le conoce
como: ganancia de voltaje.
No tiene noción alguna del error de la variable en estado estable. Si el error
no cambia no hay acción de control. Por lo tanto no se puede usar sola.
15
Se produce un adelanto de la acción de control, si la variable controlada
cambia rápidamente la acción correctora es rápida y de gran amplitud, por lo
que el sistema de control actúa rápidamente antes de que el error sea
grande. Por supuesto la acción de control no puede anticipar a un error que
aún no se ha producido.
Amplifica las señales de ruido.
Produce un efecto de saturación en el actuador.
(Villareal, 2011)
Figura 1. 7Acción Derivativa en un Controlador.
Controlador PI (Proporcional – Integral).
En el control Integral, el elemento final se mueve de acuerdo con una función
integral en el tiempo de la variable controlada.
Esta acción elimina el problema del error en estado estacionario frente a
perturbaciones de carga constante. Por eso se utiliza para determinar de forma
automática el valor correcto de u0. Además se usa para corregir el error en régimen
permanente.

16
El controlador PI actúa mientras exista error en la salida produciendo cada vez
valores mayores para la acción integral. Por tanto, se deben tomar acciones
especiales para evitar saturaciones en los actuadores finales para errores
persistentes con el tiempo.
Otra de las razones intuitivas que ayuda a comprender los beneficios de la acción
integral es que, cuando se introduce, la existencia de un pequeño error durante un
intervalo prolongado de tiempo puede dar lugar a un gran valor de la señal de
control.
Figura 1. 8Acción Proporcional - Integral en un Controlador.
Controlador PD (Proporcional – Derivativo).
En la regulación derivada existe una relación lineal continua entre la velocidad de
variación de la variable controlada y la posición del elemento final de control. Es

17
decir, el movimiento de la válvula es proporcional a la velocidad de cambio de la
variable.
Uno de los problemas del controlador PI y que limita su comportamiento es que solo
considera los valores del error que han ocurrido en el pasado, es decir, no intenta
predecir lo que pasará con la señal en un futuro inmediato.
La acción derivativa realiza ese tipo de compensación, que se basa en introducir
una acción de predicción sobre la señal de error. Una forma sencilla de predecir es
extrapolar la curva de error a lo largo de su tangente. (Automática, 2007)
Figura 1. 9 Acción de control Proporcional Derivativo de un Controlador.
Controlador PID (Proporcional – Integral – Derivativo).
La combinación de una acción de control proporcional, una acción de control integral
y una acción de control derivativa se denomina acción de control proporcional –

18
integral – derivativo o PID. Esta acción combinada tiene las ventajas de cada una
de las tres acciones de control individuales.
Si la señal de error es una función rampa unitaria, la salida del controlador PID es
una combinación de amplificación, reajuste y anticipación, propios de las acciones
proporcional, integral y derivativa.
El controlador PID combina en un único controlador la mejor característica de
estabilidad del controlador PD con la ausencia de error en estado estacionario del
controlador PI.
La adición de la acción integral a un controlador PD es esencialmente lo mismo que
añadir dicha acción a un controlador P.
(Galeón.com, 2009)
Figura 1. 10 Acción Proporcional - Integral - Derivativa en un Controlador.

19
Figura 1. 11Acciones PI, P, PD en un Controlador.
Figura 1. 12Acción PID, PD, P en un Controlador.

20
1.5 ESTRATEGIAS DE CONTROL.
En el diario vivir las personas, según sus necesidades, recurren unas a otras en
forma ordenada con la finalidad de solucionar un problema o efectuar determinadas
labores. En función de esto podemos indicar que para determinadas problemáticas
existen estructuras o circuitos que son encargados de tomar un dato inicial respecto
de una necesidad y lograr, según una determinada distribución de piezas o
componentes, alcanzar una meta. A este concepto por lo general se le denomina
estrategia. Cuando hablamos de estrategia determinamos una distribución de
piezas, las cuales tienen ciertas tareas que efectuar y en algún orden. Todo esto
para alcanzar nuestro objetivo.
En el mundo del control automático también existe este concepto, en este caso se
denomina estrategia de control y está relacionado con la distribución de los
dispositivos o equipos bajo los cuales funciona una máquina o específicamente una
aplicación o proceso. A continuación ampliaremos más este concepto.
Determina la estructura o circuito que sigue la información o señales en el lazo.
Dependiendo de la aplicación (entorno de trabajo, máquina) a gobernar se debe
definir el actuar de las variables de proceso (presión, flujo, temperatura, etc,). En
función de esta información se incorporaran determinados instrumentos y/o equipos
con los cuales se debe lograr la estabilidad en la aplicación o sistema.
Estos instrumentos y/o equipos podrán estar en cantidades (varios sensores, varios
controladores, etc.) y dispuestos en una jerarquía o circuito específico determinado
por el Ingeniero de proceso. Por lo general cada entorno de trabajo tiene sus
estrategias establecidas. (Villalobos)

21
Control en lazo cerrado.
La estructura genérica de un sistema en lazo cerrado se ilustra en la siguiente
ilustración. El transductor de entrada convierte la forma de entrada a la forma
empleada por el controlador. Un transductor de salida, o detector, mide la respuesta
de salida y la convierte en la forma empleada por el controlador. Por ejemplo, si el
controlador utiliza señales eléctricas para manejar las válvulas de un sistema de
control de temperatura, la posición de entrada y la temperatura de salida son
convertidas en señales eléctricas.
La posición de entrada puede convertirse en voltaje por medio de un potenciómetro,
o resistor variable, y la temperatura de salida puede ser convertida en voltaje por
medio de un termistor, o dispositivo cuya resistencia eléctrica cambia con la
temperatura.
El primer punto suma entrega la suma algebraica de la señal proveniente de la
entrada y la señal de salida, que lleva por medio de la trayectoria de realimentación,
que es la trayectoria de retorno desde la salida al punto suma. En la figura, la señal
de salida se resta de la señal de entrada. El resultado, generalmente, recibe el
nombre de señal de actuación; pero, en sistemas donde los transductores de
entrada y salida tienen ganancia unitaria (es decir, el transductor amplifica por 1 su
entrada), el valor de la señal de actuación es igual a la diferencia real entre la
entrada y la salida. Bajo esta condición, la señal de actuación se llama error.
El sistema en lazo cerrado compensa perturbaciones al medir la respuesta de
salida, alimentando esa medida a una trayectoria de realimentación y comparando
esa respuesta con la entrada en el punto suma. Si hay alguna diferencia entre las
dos respuestas, el sistema acciona la planta, por medio de una señal de actuación,

22
para hacer la corrección. Si no existe diferencia, el sistema no acciona la planta
puesto que la respuesta de la planta ya es la respuesta deseada.
Los sistemas en lazo cerrado, entonces, tienen la obvia ventaja de una mayor
precisión que los sistemas en lazo abierto, aun cuando son menos sensibles al
ruido, a perturbaciones y a cambios en el entorno. La respuesta transitoria y error
en estado estable se puede controlar en forma más cómoda con mayor flexibilidad
en los sistemas de lazo cerrado, con frecuencia mediante un sencillo ajuste de la
ganancia (amplificación) en el lazo, y a veces con un rediseño del controlador.
Al rediseño se le llama compensación del sistema y el hardware resultante,
compensador. Por otra parte, los sistemas en lazo cerrado son más complejos y
costosos que aquellos en lazo abierto. Así, el ingeniero de sistemas de control debe
considerar el punto intermedio entre la sencillez y bajo costo de un sistema en lazo
abierto, y la precisión y más alto costo de un sistema en lazo cerrado.
En resumen, los sistemas que realizan la medición y corrección previamente
descritas se llaman sistemas en lazo cerrado, o de control realimentado. Los
sistemas que no tienen esta propiedad de medición y corrección se llaman sistemas
de lazo abierto.(Kúo, 2008)
Figura 1. 13Diagrama a bloques de lazo de control cerrado.

23
Control en cascada.
El control en cascada consta de dos lazos de realimentación, uno de los cuales es
interno al otro. Su objetivo es el de mejorar el desempeño de un lazo de control
realimentado que no funciona satisfactoriamente, aunque su controlador esté bien
sintonizado, debido a la lentitud de respuesta de su variable controlada, que entra
en diferentes puntos del lazo y cuyo efecto sobre la variable controlada no se puede
detectar rápidamente, desmejorando la controlabilidad. Una de las principales
aplicaciones del control en cascada es en procesos donde la variable manipulada
es un fluido de servicio (como el agua o el vapor) sometido a perturbaciones.
Figura 1. 14 Diagrama a bloques de lazo de control en cascada.
En el control en cascada la salida del lazo externo o principal, llamado el control
maestro, fija el punto de referencia del lazo interno o secundario, denominado el
controlador esclavo.
1.6 FLUIDO DE TRABAJO, EQUIPO E INSTRUMENTACIÓN.

24
1.6.1 Fluido de trabajo.
Un fluido de trabajo es aquel que de acuerdo a sus propiedades puede transferir su
energía o utilizarla para realizar otra tarea de acuerdo al sistema que este aplicado.
Los fluidos de transferencia térmica no acuosos y especiales para fase líquida son
usados en aplicaciones industriales en temperaturas desde los -88ºC a los +343ºC,
incluyendo aceites minerales y fórmulas sintéticas y orgánicas. Los fluidos de base
sintética- orgánica alcanzan los rangos de temperatura más altos sin llegar a la
ebullición o evaporización. Los productos de bajas temperaturas extremas
permanecerán en estado líquido.
1.6.2 Equipo de trabajo.
Bombas centrifugas.
Es un elemento mecánico que tiene como función transportar fluidos de un lugar a
otro con la finalidad de ayudar al fluido a vencer la diferencia de presión, altura o
velocidad entre el origen y el destino.
Tipos de Bombas
Las bombas “volumétricas” o “de desplazamiento positivo” se caracterizan porque
el caudal que impulsan, a velocidad de accionamiento constante, es sensiblemente
independiente de la presión de descarga. Las variaciones de caudal que puedan
producirse para distintas presiones se deberán a las inevitables luces constructivas
o a faltas de estanqueidad en algunos órganos constitutivos. Se distinguirá entre las
máquinas de accionamiento reciprocantes y las rotativas. En las primeras un órgano
impulsor (un pistón o un diafragma) tiene un movimiento alternativo provocado
mecánicamente.

25
En las segundas hay una o más piezas con movimiento rotatorio (“rotor”) que toma
el líquido de un recipiente a baja presión y lo trasvasa a otro a mayor presión Como
criterio general, suelen ser usadas para aplicaciones que requieran bajos caudales
y altas o muy altas presiones. A diferencia de las máquinas centrífugas, pueden
trabajar satisfactoriamente con bajas velocidades y en la mayoría de los casos son
relativamente insensibles al efecto de la viscosidad del fluido. Al ser el caudal
independiente de la presión de descarga, en su instalación se deberá prever
siempre la posibilidad de alivio de presiones excesivas. Suele incorporarse a la
bomba, o en su defecto instalarse exteriormente, una válvula de alivio que, al
superarse en la cañería de impulsión la presión tardada, la comunica o bien con el
exterior o, más adecuada y frecuentemente, con la cañería de admisión.
1.6.3 Instrumentación.
Un termopar es un dispositivo de estado sólido que se utiliza para convertir la
energía calorífica en voltaje. Consta de dos metales diferentes empalmados en una
juntura.Pueden utilizarse como materiales para la fabricación de termopares, tales
como: hierro y Constantano, Cobre y Constantano o Antimonio y Bismuto.(Jalloul,
s.f.)
La correcta longitud de inmersión debe ser la suficiente para que el sensor este en
equilibrio térmico con el elemento a medir, como regla general, para medida en
gases debe ser un mínimo de 10 veces el diámetro del sensor y para líquidos un
mínimo de 8 veces.
Para tuberías con diámetros pequeños se recomienda el montaje en diagonal o en
un codo de la tubería, orientando la punta del sensor contra la dirección del flujo
medido.

26
Tabla 1. 3 Tipos de termopares.
Tipo de termopar Composición química Rango de aplicación
usual (°C)
B Platino 30% Rodio
Platino 6 % rodio
1370-1700
C Tungsteno 5% Renio
Tungsteno 26% Renio
1650-2315
E Cromelconstantan 95-900
J Hierro Constntan 95-760
K Cromelalumel 95-1260
N Nicrosil- nisil 650-1260
R Platino 13%-platino 870-1450
S Platino 10%-platino 980-1450
T Cobre.constantan -200-350
Hierro-Constantano (tipo J)
En este tipo de junta el hierro es electropositivo y el Constantano electronegativo.
Mide temperaturas superiores que el anterior ya que el hierro empieza a oxidarse a
partir de los 700º C. No se recomienda su uso en atmósfera donde exista oxigeno
libre. Tiene un costo muy bajo en comparación con un modelo de mayor rango y
esto permite que su utilización sea generalizada.
Tabla 1. 4 Características del termopar tipo J
TERMOPAR TIPO J
Temperatura máxima (°C) 700
Voltaje de salida (V) 0-10
27
Corriente de salida (mA) 4-20
Precisión (%) del rango de medición 0.7
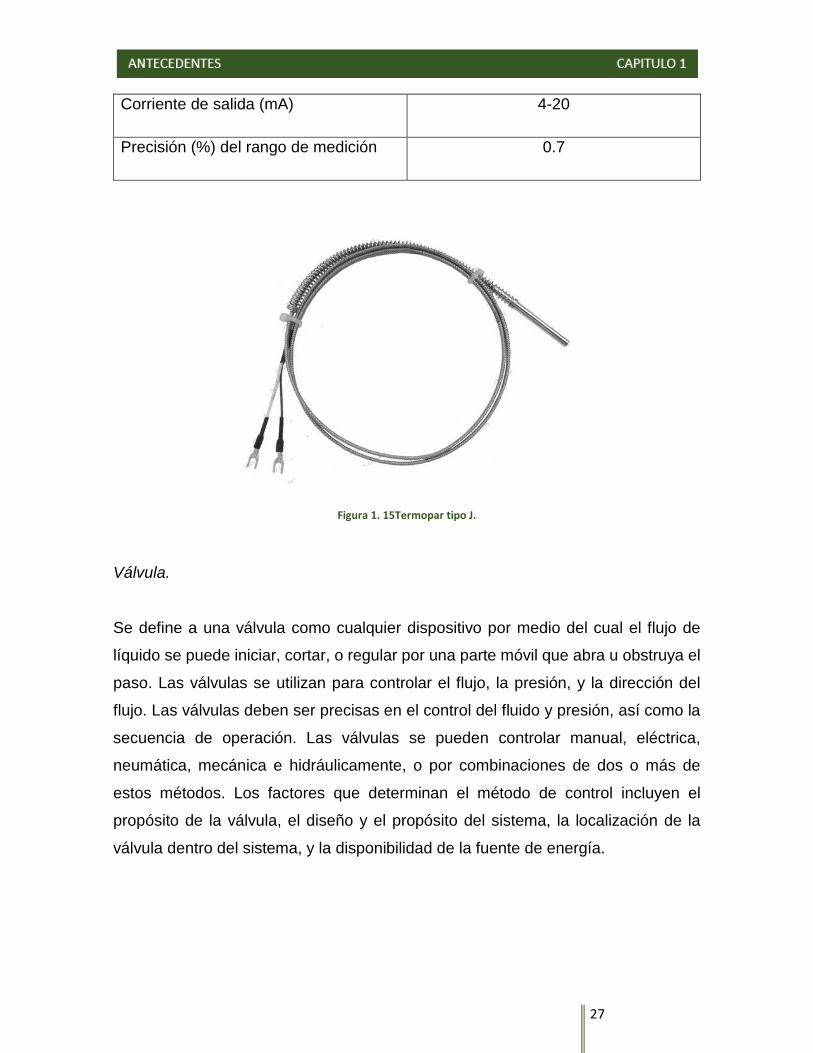
Figura 1. 15Termopar tipo J.
Válvula.
Se define a una válvula como cualquier dispositivo por medio del cual el flujo de
líquido se puede iniciar, cortar, o regular por una parte móvil que abra u obstruya el
paso. Las válvulas se utilizan para controlar el flujo, la presión, y la dirección del
flujo. Las válvulas deben ser precisas en el control del fluido y presión, así como la
secuencia de operación. Las válvulas se pueden controlar manual, eléctrica,
neumática, mecánica e hidráulicamente, o por combinaciones de dos o más de
estos métodos. Los factores que determinan el método de control incluyen el
propósito de la válvula, el diseño y el propósito del sistema, la localización de la
válvula dentro del sistema, y la disponibilidad de la fuente de energía.

28
Servoválvula.
Este tipo de válvulas regula la presión y el caudal a través de un conducto por medio
de una señal eléctrica, que puede ser de corriente o de voltaje. Su principal
aplicación es el control de posición y de fuerza, ya que los movimientos son
proporcionales y de precisión, lo que permite un manejo más exacto del paso de
fluidos.
Por medio de una válvula proporcional podemos realizar un control de posición de
lazo cerrado, donde el actuador podría ser un cilindro, el sensor un sistema óptico
que envía pulsos de acuerdo a la posición de dicho cilindro, y el controlador un
procesador que gobierne el dispositivo en general. El número de impulsos se
incrementa a medida que el pistón se desplaza a la derecha y disminuye cuando se
mueve a la izquierda.
Figura 1. 16Servoválvula de línea.
Las servoválvulas son accionadores de tipo neumático o hidráulico que conectan
dos o más vías por las que circula un fluido. La diferencia con las válvulas es que
estas son de tipo todo o nada, mientras que las servoválvulas tienen la posibilidad
de controlar la presión o el caudal.
29
Se recuerda que mandar significa dar una orden para que se pongan los medios
con el fin de conseguir un objetivo, pero la consecución de éste no es controlada y
aunque no se obtenga el objetivo con exactitud los medios no sufren correcciones.
Sin embargo regular lleva consigo, además de dar la orden para que se pongan los
medios para conseguir uno objetivo, se controla la consecución de éste, y si no se
cumple, se realizan las correcciones pertinentes hasta conseguirlo.
Las servoválvulas disponen de una retroalimentación interna que cumplen la función
de regulación descrita, de esta forma se obtiene en los circuitos hidráulicos que las
utilizan un alto grado de exactitud, superior que con las válvulas proporcionales y
muy superior que con las convencionales.

CAPÍTULO II: DISEÑO Y PROPUESTA DE
CONTROL.

31
2.1 FILOSOFÍA DE OPERACIÓN.
La siguiente etapa es el control del fluido de trabajo del proceso. Esto implica lograr
el monitoreo y manipulación de cada una de sus variables que afectan la circulación
del mismo. En el siguiente diagrama de flujo se puede observar comportamiento del
sistema.

32
INICIO
SE MIDE LA TEMPERATURA DEL FLUIDO
LA TEMPERATURA
MEDIDA ES IGUAL A
LA TEMPERATURA
REQUERIDA
SE MONITOREA EL
SISTEMA
SI
NO
OO
SE INGRESA LA TEMPERATURA REQUERIDA
LA TEMPERATURA
MEDIDA ES IGUAL A
LA TEMPERATURA
REQUERIDA
SE MONITOREA EL
SISTEMA
SI
NO
OO

33
Figura 2. 1 Diagrama a bloques del sistema
SE REGULA EL FLUJO DEL FLUIDO CON LA VÁLVULA
PROTOTIPO
SE MIDE LA TEMPERATURA DEL FLUIDO
LA TEMPERATURA
MEDIDA ES IGUAL A
LA TEMPERATURA
REQUERIDA
SI
NO
NO
SE MONITOREA EL
SISTEMA
¿SE REQUIERE
OTRA
TEMPERATURA
?
INICIO
NO
NO

34
2.1.1 Proceso manual.
El siguiente Diagrama de Tubería e Instrumentación (DTI) representa el sistema de
calentamiento de un fluido de trabajo el cual opera de manera manual el control del
encendido y apagado del sistema. Nótese que no se controla la variable de
temperatura en el tiempo de manera requerida, el objetivo de este sistema es que
el fluido de trabajo alcance una temperatura estimada, pero no se realiza alguna
acción de control sobre esta variable.
Figura 2. 2DTI colector solar manual.
El fluido de trabajo contenido en el tanque enchaquetado con fibra de vidrio y
aluminio (T-101) es conducido por efecto de gravedad a la bomba centrifuga (B-

35
101), la cual lo transmite a través de la tubería al punto focal del colector solar (C-
101), en donde es concentrada toda la radiación emitida por el sol que llega al
captador solar, en este punto se encuentra un serpentín pequeño de tubería de
cobre que transmite el calor de la radiación obtenida al fluido de trabajo, este
regresa al tanque por efecto de gravedad para calentarlo, de esta manera el ciclo
vuelve a empezar, a fin de que la temperatura incremente poco a poco hasta
alcanzar la temperatura deseada.
En caso de que se necesite aplicar un mantenimiento o ajustes físicos al sistema
como cambio de equipos o implementación de instrumentación; o la interrupción del
fluido de emergencia por sobrecarga, el prototipo cuenta con una válvula manual
enseguida de la bomba que se module dependiendo de las características del
proceso en momento.
2.2 PROPUESTA DE INGENIERÍA.
2.2.1 Diseño del sistema de control.
Como ya fue mencionado el objetivo es lograr la manipulación del aceite para
controlar las variables de flujo y de temperatura. Por lo cual se propone hacer esta
manipulación a través de la colocación del prototipo de válvula enseguida de la
bomba, lo cual va a justar el tiempo que dure el fluido de trabajo dentro del serpentín
y así aumentar o disminuir su temperatura.
El sistema en el cual se está trabajando ya cuenta con un medidor de flujo de tipo
turbina de salida eléctrica, la cual, mediante la tarjeta Arduino®, es monitoreada en
el HMI. Al igual que el flujo es necesario medir la temperatura en la salida del
sistema que en este caso es después del serpentín, esta va a ser monitoreada con
el fin de ver su comportamiento hasta llegar al punto de ajuste que se asigne por el
usuario, logrando esto a través de la modulación delprototipo de válvula.

36
La estrategia de control que se implementó para el sistema, fue el control por lazo
cerrado, el cual expone que al punto de ajuste ingresa la temperatura deseada y la
compara con la señal que envía el termopar (variable rectificada), el error obtenido
pasa por el controlador de temperatura y emite la señal de control (5 volts) al
actuador, que en este caso es el prototipo de válvula; la variable manipulada ingresa
a nuestro sistema de la cual se obtiene la variable de proceso ya corregida y de la
cual se vuelve a medir para observar que no salga del punto de ajuste o si este es
modificado se vuelva a ajustar. No queda descartada la utilización de un control en
cascada que pueda favorecer en la respuesta del sistema.
Figura 2. 3 Lazo de control del proceso.

37
Figura 2. 4DTI colector solar automatizado.
El aceite sintético orgánico resistente a altas temperaturas, el cual circula por una
tubería de cobre de 3/8 de pulgada, el flujo forzado del fluido es accionado mediante
una bomba centrifuga de 1/2 HP (B-101) con el fin de transmitirlo al punto focal del
colector solar tipo parabólico (C-101), el cual se encuentra localizado en la parte
más alta del proceso.
El momento en el que el fluido llega al serpentín del colector solar (punto focal), el
fluido absorbe toda la radiación emitida por el sol que es reflejada por el colector (C-
101), alcanzando altas temperaturas, por efecto de gravedad el fluido desciende e
y entra en contacto con el termopar (TE-101A) que mide su valor y lo compara con
el flujo para verificar si la respuesta es correcta, descendiendo aún más, el fluido
llega a el tanque de almacenamiento (T-101) que simula la entrada alintercambiador

38
de calor, al cual incrementa poco a poco su temperatura hasta alcanzar la
temperatura deseada; es difícil que la temperatura del tanque descienda ya que
contiene un enchaquetado de fibra de vidrio y aluminio que evita la disipación de
energía al medio ambiente.
El flujo del aceite se controla mediante el prototipo de válvula que está en seguida
de la válvula manual; el orden de instalación de estas válvulas se debe a que el
control del flujo que ejerce el prototipo de válvula se realiza dentro de un porcentaje
de apertura de la válvula manual o posterior con el fin de obtener una mayor
precisión.
Lo que determina el porcentaje de apertura del prototipo de válvula es la acción que
manda a realizar el algoritmo de control; esta acción es obtenida de la comparación
de la temperatura ingresada (punto de ajuste) y la variable de proceso obtenida del
sensor de temperatura (TE 101-A), con lo cual es preciso decir que el control de
flujo a su vez realiza el control de temperatura.
El control de estos instrumentos como son los sensores y el elemento final de control
son realizados a través de una Interfaz Hombre Maquina (HMI), la cual está
diseñada y programada con el software Labview de National Instruments®.
Estableciendo una comunicación tomando como tarjeta de adquisición de datos a
la tarjeta Arduino Uno®.
2.3 VARIABLE MANIPULADA Y VARIABLE CONTROLADA.
EL flujo del aceite de trabajo será la variable manipulada, con la cual lograremos el
control de la temperatura.
Para observar el comportamiento de la variable de flujo se requiere la colocación
de un sensor de flujo de tipo turbina enseguida del prototipo de válvula de

39
control.Esta a su vez será controlada y monitoreada a través de la comunicación
con la HMI, obteniendo así un incremento o disminución de la temperatura del fluido
ya que se varia su velocidad y al mismo tiempo su estancia en el serpentín.
Figura 2. 5Sensor de flujo tipo turbina.
Para la medicion de la variacion de la temperatura se implementara un termopar
tipo J, que enviará la señal a la interfaz para su lectura y ajuste.
Debido a que las caracteristicas del sensor de flujo especifican que su temperatura
de operación es entre los -20°C minimo y un maximo de 60°C se hace el ajuste del
flujo antes de que el proceso esté sometido a condiciones de operación requeridas
(expuesto a la radiacion solar).
Es importante la regulación de la temperatura del flujo de trabajo antes de llegar a
la bomba que recircula este líquido, ya que a pesar de que el proyecto está diseñado
para instalaciones grandes como hoteles y restaurantes, y el fluido soporta altas
temperaturas, este debe de llegar a la bomba con una temperatura apta para que
trabaje en sus condiciones ideales, que en este caso no debe exceder los 150°C.
Sistema de seguridad.
El control de la temperatura durante el resto del proceso es para el sistema de
seguridad implementado, ya que cuando el flujo o la temperatura salgan de los

40
rangos preestablecidos, estos se detectaran y mandaran la señal de alerta para
parar el sistema y evitar algún riesgo.
Este sistema de seguridad además de contar con los sensores ya colocados en el
lugar específico, cuenta con otras dos válvulas ON-OFF que interrumpirán el paso
del fluido.
Fluido de trabajo
Fluido sintético orgánico para transferencia de calor de rango medio.
THERMOLLIN M, es fabricado con una mezcla de aromáticos sintéticos (di y
triarilcompuestos) y bifenilisopropilo. Los cuales tienen una gran transferencia de
calor en alta temperatura y fase liquida, con una estabilidad térmica elevada. Es el
fluido de transferencia de calor de mayor estabilidad en fase liquida, en baja presión,
actualmente.
Beneficios y propiedades.
Desarrollado para usarse en temperaturas hasta 360ºC en fase liquida. (Con una
presión estática de 2 bar en alta temperatura). Rango de temperatura de aplicación
-10 ºC / 360 ºC. No es corrosivo a los materiales típicos con los que se construyen
los sistemas de transferencia de calor. Bajo olor y color y buenas características de
manejo, no se desvanece. Excelentes propiedades de fluidez a bajas temperaturas.
Gran estabilidad térmica.
Aplicaciones.
Las propiedades del THERMOLLIN M, lo hacen ideal para aplicaciones en alta
temperatura en operaciones y procesos de refinación, tales como: proveer el
calentamiento indirecto en procesos químicos, calentamiento para la recuperación
de gases, como enfriamiento para remover el calor en reacciones exotérmicas, para
calentamiento indirecto en destilación.

41
Tabla 2. 1Características del fluido de trabajo.
THERMOLLIN M
PROPIEDADES MÉTODO RESULTADO
COMPOSICIÓN ---------- BIFENIL ISOPROPILO ISÓMEROS AROMÁTICOS
APARIENCIA VISUAL ---------- LIQUIDO SIN COLOR Y BAJO OLOR
VISCOSIDAD A 20°C CST VISCOSIDAD A 40°C CST
DIN51562, PARTE 1
8.2 / 9.5 4.0 / 6.0
RANGO DE EBULLICIÓN °C DIN51761 293 / 315
% CONTENIDO DE AGUA DIN51777 <0.02
PUNTO DE INFLAMACIÓN °C DIN51758 >149
PUNTO DE AUTOIGNICIÓN °C DIN51794 >430
PUNTO DE CONGELACIÓN °C ISO 3016 <-40
COEFICIENTE DE EXPANSIÓN TÉRMICA cc/cc °C
---------- 1 X 10−3
TEMPERATURA MÁXIMA DE PELÍCULA °C
---------- 375
CALOR ESPECÍFICO (EN p.e.) KJ/Kg °C
---------- 2.5
Equipos.
Bomba de C.A. abierto a prueba de goteo.
Armazón 56 arranque por capacitor. Tipo 1RF3 056-4YC41. Se tiene en el proceso
un motor monofásico C.A. como bomba para la recirculación del fluido de trabajo a
través de la tubería para llegar al serpentín del colector solar y continuar con el
proceso.
Figura 2. 6Motor monofásico.

42
Tabla 2. 2Especificaciones de la bomba.
Tanque de almacenamiento.
En el proceso se utiliza el tanque para almacenar el fluido de trabajo que avanza a
la bomba de C.A. para que inicie el proceso. Cuenta con un enchaquetado de fibra
de vidrio y aluminio el cual provoca un aislamiento térmico, esto quiere decir que el
calor con el que llega el fluido al tanque es conservado dentro del mismo evitando
que existan pérdidas al disiparse con el medio ambiente, ya que el aceite en este
momento el fluido de trabajo se re circula después de ser calentado en el serpentín
del colector solar.
BOMBA DE C.A.
Potencia CP 1.0
Tipo 1RF30564YC41
Velocidad nominal (r.p.m.) 1745/1720
Tensión nominal (Volt) 127/220
Corriente nominal (A) 16/7.4
Factor de servicio 1.15
Corriente a F.S.(A) 16.9/8.2
Peso neto (Kg) 15.4
Longitud L (mm) 313
Temperatura máxima de operación (°C) 150
43
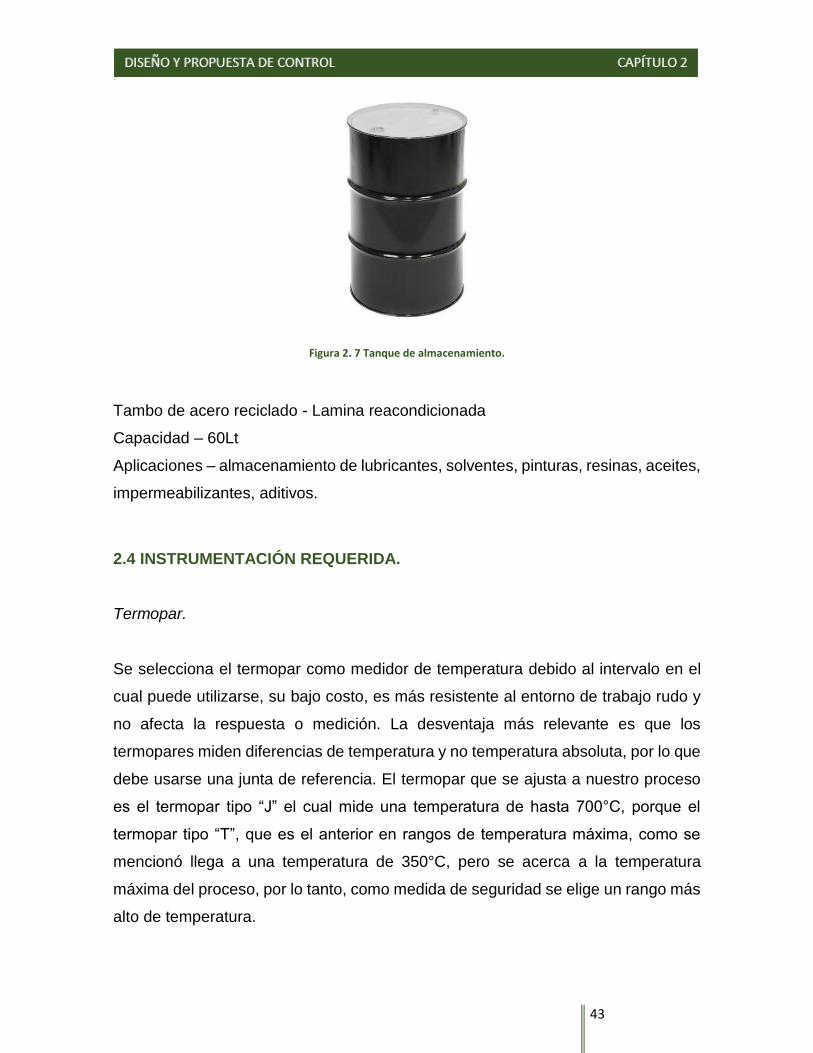
Figura 2. 7 Tanque de almacenamiento.
Tambo de acero reciclado - Lamina reacondicionada
Capacidad – 60Lt
Aplicaciones – almacenamiento de lubricantes, solventes, pinturas, resinas, aceites,
impermeabilizantes, aditivos.
2.4 INSTRUMENTACIÓN REQUERIDA.
Termopar.
Se selecciona el termopar como medidor de temperatura debido al intervalo en el
cual puede utilizarse, su bajo costo, es más resistente al entorno de trabajo rudo y
no afecta la respuesta o medición. La desventaja más relevante es que los
termopares miden diferencias de temperatura y no temperatura absoluta, por lo que
debe usarse una junta de referencia. El termopar que se ajusta a nuestro proceso
es el termopar tipo “J” el cual mide una temperatura de hasta 700°C, porque el
termopar tipo “T”, que es el anterior en rangos de temperatura máxima, como se
mencionó llega a una temperatura de 350°C, pero se acerca a la temperatura
máxima del proceso, por lo tanto, como medida de seguridad se elige un rango más
alto de temperatura.

44
Otras características que se toman en cuenta para la selección de este termopar
son el tipo de fluido y su aplicación, ya que si el fluido de trabajo es corrosivo o si
produce algún tipo de oxidación debe adicionarse un tipo de termopozo que proteja
la cúpula del termopar, o si el fluido es utilizado con fines clínicos, alimenticios o
algún otro tipo de esterilización, la punta o el material del termopar debe contar con
otras característicos específicas. En este caso no es necesario aplicar alguna de
estos aditamentos ya que el fluido de trabajo no es corrosivo y no está en contacto
con demás elementos que necesiten algún tipo de esterilización.
El termopar tipo “K” tampoco es el adecuado, ya que tiene un rango de medición de
hasta 1200°C y resulta sobrado para la aplicación, además es resistente a la
oxidación (no aplica al proceso) y por lo tanto, es más costoso que el termopar tipo
“J”.
Tabla 2. 3Características del termopar.
CARACTERÍSTICAS ESPECIFICACIONES
Tipo de sensor Termopar J
Material Acero inoxidable 304
Tipo de unión Aterrizada (Termopar)
Termopar tipos de aislantes Fibra de vidrio con malla (400° C)
Terminales Espada
Longitud de extensión en cm, mm ó pulgadas
1m
Las normas que rigen la determinación de los parámetros de los termopares para
su instalación en procesos son las siguientes.

45
IEC 60584-1: Termopares: valores básicos de las tensiones térmicas
IEC 60584-2: Termopares: desviaciones límite de las tensiones térmicas
IEC 60584-3: Termopares: Cables de termopar y cables de compensación
ASTM E230: Tablas con especificación estándar y fuerza electromotriz (F.E.M.)
para termopares normalizados.
Medidor de flujo mj-hz21wa g1 / 2 '' rosca de plástico.
Se utiliza un sensor de flujo tipo turbina como indicador, para ajustar el flujo de
trabajo dentro de la tubería, indicando los rangos óptimos para el correcto
funcionamiento del proceso.
Figura 2. 8Medidor de flujo - MJ-HZ21wa G1 / 2 '' Rosca de plástico.
Tabla 2. 4Especificaciones del sensor de flujo.
CARACTERÍSTICAS
ESPECIFICACIONES
Material PBI grado alimenticio
Presión Máxima - Desempeño
1.75 MPa no genera fenómeno de slack, quebramiento de instrumento, inflación ni
deformaciones anormales
Temperatura Máxima 60°C

46
Flujo 1 Lt/Min – 30 Lt/Min
Voltaje DC 3-18V
Corriente 15Ma
Pulsos de salida máximo 4.5V subida
Pulsos de salida mínimo 0.5V Bajada
Resistencia dieléctrica 100MΩ
Fuerza eléctrica AC 500V 50HZ
2.5 CONSTRUCCIÓN DELPROTOTIPO DE VÁLVULA.
Para realizar la manipulación de nuestro fluido de trabajo (aceite orgánico sintético)
fue necesario diseñar, construir e implementar un prototipo de válvula la cual
regulara el paso flujo, ya que dependiendo de este, se controlaba el tiempo de su
estancia en el serpentín y por consecuente se varía la temperatura de salida del
fluido.
El objetivo que se tiene en la fabricación de este prototipo de válvula es mantener
al obturador en la posición deseada el tiempo que se necesite y a su vez, si hay
variaciones en el punto de ajuste, esta tenga la capacidad de ajustarse de forma
automática. Se optó por el diseño de esteprototipo de válvula ya que el proyecto
está en fase de prueba, por lo cual se reducen los gastos en comparación con una
servo válvula de línea, mas no su funcionamiento y aplicación, ya que cuenta con
un nivel alto de precisión.
2.5.1.- Diseño de prototipo de válvula.
El prototipo de válvula fue implementado sobre una válvula de compuerta que ya
estaba montada en el prototipo del colector solar.

47
Para lograr que el prototipo de válvula actuara conforme a nuestras necesidades,
primeramente se pensó en utilizar un motoreductor de CD con doble flecha, en las
cuales se les acoplaría un potenciómetro y la válvula manual a cada una de ellas
respectivamente como se observa a continuación.
Figura 2. 9 Primer diseño de la propuesta de válvula.
Este diseño fue descartado ya que por su estructura no tenía la estabilidad
necesaria para mantenerse firme. Además de que no fue fácil encontrar un motor
con doble flecha y que además tuviera la fuerza necesaria para controlar la apertura
o cierre de la válvula que se adecuó. Por tanto se tuvo que hacer un rediseño el cual
eliminara o disminuyera estas ineficiencias.
Se realizó un diseño nuevo que compensara las deficiencias que presentaba el
diseño original, se buscó un motor que cumpliera con las características de torque,
alimentación, tamaño y movimiento necesarios para nuestra aplicación.
Se encontró el moto reductor de un solo eje, y se adaptó el potenciómetro usando
un tren de engranes que girara simultáneamente al accionar el motor y la
modulación de la válvula; donde el movimiento que realizan el motor y la válvula sea

48
equivalente al movimiento del potenciómetro y así enviar una señal de
retroalimentación para tomar la decisión de regulación de la válvula. Al final todo se
monta en una base donde los componentes se fijan en ésta para mejor estabilidad
y manipulación más sencilla. El prototipo finalmente se arma como se muestra:
Figura 2. 10Diseño modificado del prototipo de válvula
Motor.
Es utilizado para generar un movimiento de apertura y cierre en la válvula(girando
derecha o izquierda respectivamente), convirtiéndose este en un movimiento electro
mecánico. Se seleccionó principalmente el motor reductor ya que entrega un gran
torque capaz de mover mecanismos resistentes al movimiento.
Tabla 2. 5Especificaciones del motoreductor.
MOTOREDUCTOR
Voltaje de alimentación 3-12 VDC
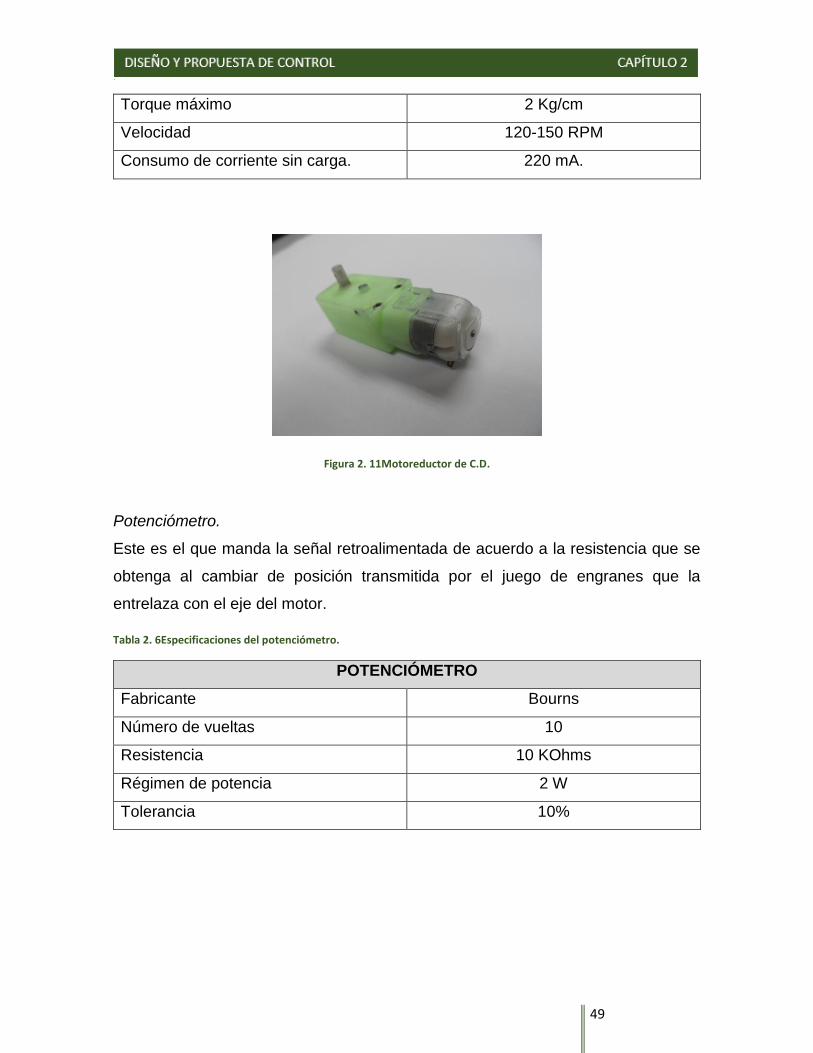
49
Torque máximo 2 Kg/cm
Velocidad 120-150 RPM
Consumo de corriente sin carga. 220 mA.
Figura 2. 11Motoreductor de C.D.
Potenciómetro.
Este es el que manda la señal retroalimentada de acuerdo a la resistencia que se
obtenga al cambiar de posición transmitida por el juego de engranes que la
entrelaza con el eje del motor.
Tabla 2. 6Especificaciones del potenciómetro.
POTENCIÓMETRO
Fabricante Bourns
Número de vueltas 10
Resistencia 10 KOhms
Régimen de potencia 2 W
Tolerancia 10%

50
Figura 2. 12Potenciómetro de precisión.
Engranes.
Son los encargados de trasmitir el torque del motor al potenciómetro en una relación
1:1.
Tabla 2. 7Especificaciones del engrane.
ENGRANE
Material Acero 8620, acero aleado bajo carbón para poder
cementar
Numero de dientes 20 dientes
Diámetro exterior 3.3 cm
Diámetro interior 0.6 cm
Cabeza de diente 0.2 cm
Diámetro primitivo 2.7 cm
Longitud de diente 0.6 cm
Distancia entre centros 3.0 cm

51
Figura 2. 13Engranes de acero al alto carbón.
Válvula.
Esta es la que recibe el control de posición en su compuerta; dependiendo del
número de giros y el sentido de estos se estrangulara para ajustar su abertura.
Tabla 2. 8Especificaciones de válvula.
VÁLVULA
Material Latón
Montado Roscado
Medida 1/2" – 13 mm
Cierre compresión 200 lbs/pulgWOG
Figura 2. 14Válvula de compuerta.

52
Base de aluminio.
La base es donde se acoplan la válvula, el motor y el potenciómetro para
mantenerlos fijos.
Figura 2. 15Base de aluminio.
2.5.1.- Construcción delprototipo de válvula.
Para lograr la construcción del prototipo de válvula, en el taller de máquinas y
herramientas del IPN ESIME Zacatenco se maquilaron dos engranes de acero al
aleado bajo carbón (6820) ambos con mismas dimensiones, la base, dos soportes
o postes que sostienen la base y dos coples, todos estos de aluminio.
En la parte superior de la base se fijó el motor de CD y el potenciómetro de
precisión; en los ejes de cada uno de ellos se fijaron los dos coples de aluminio,
siendo el del motor el que hacia la interconexión con el vástago de la válvula; y a su
vez servían como ejes para los engranes de acero.
Antes de fijar todos los elementos, la válvula se calibro al 50% de apertura y el
potenciómetro a la mitad de su resistencia (5 KOhms). Para que se tuviera un
margen en la señal mandada por el potenciómetro para cuando la válvula estuviera
cerca de sus límites de operación.

53
Por último se ajustaron los postes de aluminio en las esquinas de la base para así
evitar cualquier vibración y/o desajuste en la posición de las partes del prototipo de
válvula como se muestra a continuación.
Figura 2. 16 Prototipo de válvula de control.
2.6.- DESARROLLO DE LA ESTRATEGIA DE CONTROL.
Al realizar el proceso de control se dispone de un controlador y un actuador; para
que exista una comunicación entre ellos es necesario utilizar una tarjeta de
adquisición de datos que interpretará la lógica de programación y la convertirá en
una señal eléctrica que produzca una acción en el actuador.
2.6.1 Adquisición de datos.
Se utiliza como software el programa de National Instruments Labview® donde se
realiza la lógica de programación para el proceso, se leen los datos, nos permite
manipular el proceso y se realiza el controlador, entre otras cosas.
Se eligió este programa porque satisface las necesidades del proceso, es un
Software que se domina, su programación a bloques y múltiples operaciones se

54
adaptan a la lógica que se aplica para cada parte de la programación, permite
observar su comportamiento mediante el HMI que se diseña en este programa ya
que se puede agregar imágenes, diagramas, organizar tablas entre otros efectos
visuales para facilitar la manipulación del proceso y brindar al operador una visión
clara sobre lo que se realiza.
La tarjeta de adquisición de datos que se utiliza es Arduino®, es el medio de
comunicación e interpretación de Hardware a Software compatible con Labview®
que hace lectura de entradas y salidas analógicas, es sencilla de utilizar, compacta
y contiene las terminales necesarias para el desarrollo del proceso.
La utilización de la tarjeta Arduino® es la adecuada para el proceso porque es el
medio para interactuar con el programa, hace lectura de los instrumentos de
medición de forma precisa, permite la lectura y escritura en el programa, en general
el control de cada uno de los elementos necesarios para el proceso, desde el control
de la válvula hasta el de toda la planta.
ARDUINO®.
Arduino® es una plataforma de hardware libre, basada en una placa con un micro
controlador y un entorno de desarrollo, diseñada para facilitar el uso de la
electrónica en proyectos multidisciplinares.
Arduino® puede tomar información del entorno a través de sus entradas analógicas
y digitales, y controlar luces, motores y otros actuadores. El micro controlador en la
placa Arduino® se programa mediante el lenguaje de programación Arduino®
(basado en Wiring) y el entorno de desarrollo Arduino® (basado en Processing). Los
proyectos hechos con Arduino® pueden ejecutarse sin necesidad de conectar a un
computador.
El hardware consiste en una placa con un micro controlador AtmelAVR y puertos de
entrada/salida.

55
Los micro controladores más usados son el Atmega168, Atmega328, Atmega1280,
ATmega8 por su sencillez y bajo coste que permiten el desarrollo de múltiples
diseños. Por otro lado el software consiste en un entorno de desarrollo que
implementa el lenguaje de programación Processing/Wiring y el cargador de
arranque que es ejecutado en la placa.
Para realizar la comunicación entre los componentes físicos y la computadora, se
utiliza una tarjeta de adquisición de datos, en este caso la tarjeta Arduino UNO®, la
cual es reconocida por el programa Labview®, donde se realiza la programación.
Físicamente se envía y se recibe datos por medio de voltaje de cada componente
empleado, que se requiere controlar, medir o comparar.
Un Arduino® dispone de 14 pines que pueden configurarse como entrada o salida
y a los que puede conectarse cualquier dispositivo que sea capaz de transmitir o
recibir señales digitales de 0 y 5 V.
También dispone de entradas y salidas analógicas. Mediante las entradas
analógicas podemos obtener datos de sensores en forma de variaciones continuas
de un voltaje.
Figura 2. 17 Tarjeta ARDUINO®

56
2.6.2.- Programación en Labview® para control del prototipo de válvula.
La explicación de la programación se realizó por secciones. Como lo muestra el
siguiente diagrama a bloques.
Figura 2. 18 Diagrama a bloques de la programación (1)
INICIO
SE GENERAN LOS PUERTOS
DE ENTRADA Y SALIDA DE
LA DAQ
SE ESTABLECEN LOS PINES DE
LECTURA DE L SEÑAL
ANALÓGICA
GO TO SE LEE LA
SEÑAL DEL
TERMOPAR
GO TO SE LEE
LA SEÑAL DEL
POTENCIÓMET
RO

57
Figura 2. 19Diagrama a bloques de la programación (2)
SE LEE L SEÑAL
DEL TERMOPAR
SE COMPENSA LA SEÑAL DEL
TERMOPAR
SE GRAFICA LA SEÑAL DEL
TERMOPAR
SE GENERA UN C0ONTADOR
NUMÉRICO PARA EL PUNTO DE
AJUSTE O TEMPERATURA
REQUERIDA
AL VALOR DEL PUNTO DE AJUSTE
SE LE GENERA UNA HISTÉRESIS DE
+ - 2
SE GRAFICA EL PUNTO DE
AJUSTE
LA SEÑAL DEL
TERMOPAR SE
ENCUENTRA DENTRO
DEL PUNTO DE AJUSTE
GO TO
ACCIÓN DE
CONTROL = 0
NO
SI
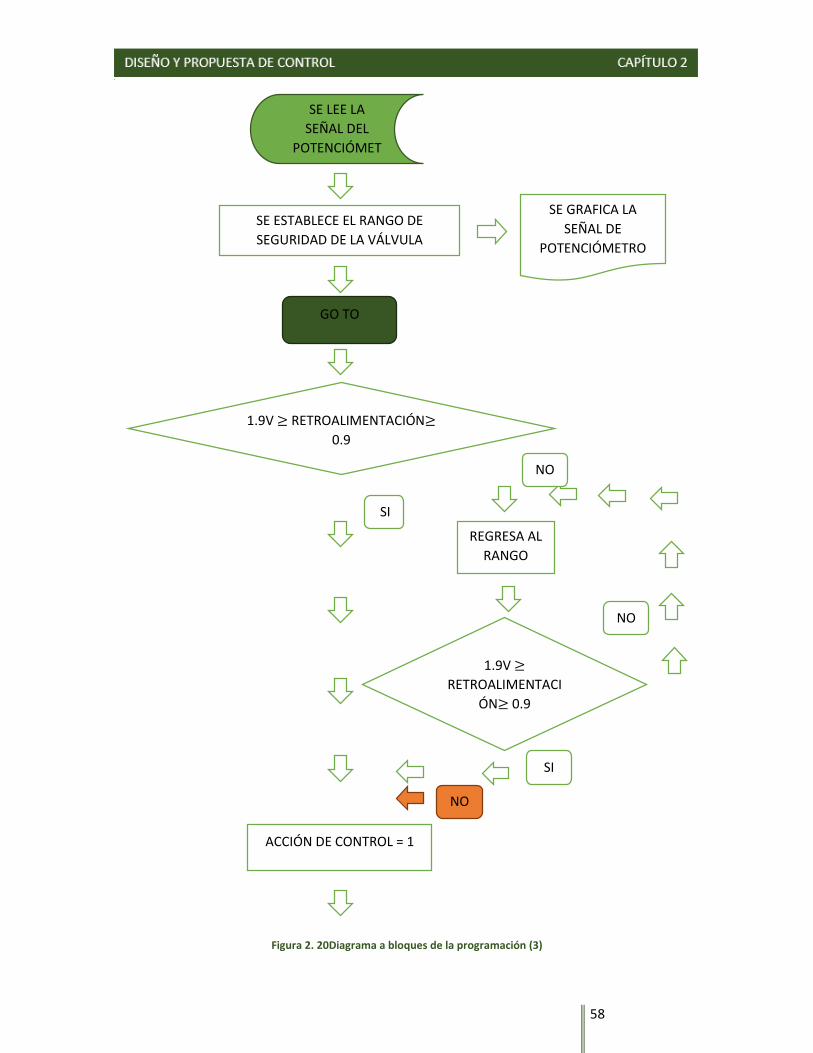
58
Figura 2. 20Diagrama a bloques de la programación (3)
SE LEE LA
SEÑAL DEL
POTENCIÓMET
RO
SE ESTABLECE EL RANGO DE
SEGURIDAD DE LA VÁLVULA
PROTOTIPO
SE GRAFICA LA
SEÑAL DE
POTENCIÓMETRO
GO TO
1.9V ≥ RETROALIMENTACIÓN≥
0.9
REGRESA AL
RANGO
1.9V ≥
RETROALIMENTACI
ÓN≥ 0.9
ACCIÓN DE CONTROL = 1
SI
NO
SI
NO
NO

59
Figura 2. 21Diagrama a bloques de la programación (4)
1.- Lectura del voltaje generada por el termopar la cual se representa en forma de
señal.
La realización de la programación se genera en la ventana de programación.
Para cualquier lectura o adquisición de datos del exterior se necesitan establecer
los pines de entrada analógica que se utilizarán, para esto se ocupa en primer lugar
el bloque INT de entrada analógica para todas las estradas analógicas, después se
realiza la lectura de lo que entra a la tarjeta arduino con el bloque READ de un solo
pin. Cuando se requiere mandar cualquier tipo de dato de salida se utiliza el bloque
CLOSE que a diferencia de la entrada INT se utilizan individualmente para cada
bloque de lectura o escritura.
¿SE ALCANZA LA
TEMPERATURA
REQUERIDA?
ACCIÓN DE CONTROL = 0
FIN
NO
SI

60
Una vez establecida la comunicación de entrada y salida se genera un bloque de
control ANAL PIN (0) para la asignación del número de pin que se utilizará. La señal
leída por el bloque READ es generada en este caso es una señal analógica que es
recibida en mili Volts, lo cual es un voltaje muy bajo es por eso que se tiene que
multiplicar por una constante para que se pueda apreciar mejor su comportamiento
y poder así manipularla (Calibración).
Tomando en cuenta que el termopar es un elemento muy sensible la lectura de
datos obtenida de esta señal es muy variable por las decimas de voltaje generadas,
es necesario reducir el número de decimales para la correcta lectura del elemento,
es por eso que se aplica el bloque DE ROUND TO NEAREST FUNCTION que
redondea los decimales, aparte se enlaza en seguida con el bloque TO BYTE
INTEGER FUNCTION que redondea el número de decimales al entero más
cercano.
Esta señal se transmite a través de todo el programa ya que es utilizada con
frecuencia tanto para comparar como para generar indicadores, después del
redondeo de la señal obtenida del termopar, se generaron las gráficas indicadoras,
así como los indicadores numéricos.
Figura 2. 22Lectura de voltaje del termopar.

61
2.-Generación del Punto de Ajuste con histéresis.
En el diseño de nuestra lógica de control se utilizó un Punto de Ajuste, este elemento
es el encargado de establecer la temperatura deseada a la cual el sistema tratará
de auto ajustarse.
Para la generación del Punto de Ajuste se tomaron en cuenta las variaciones de
voltaje transmitidas por el termopar (mV), al igual que la perturbación del
potenciómetro influyente en la señal de termopar.
Para mantener esta señal dentro del parámetro de operación y que no generar
oscilaciones infinitas de la servo válvula se realizó un arreglo de histéresis; el cual
consiste en incrementar la tolerancia del punto de ajuste, en este caso el incremento
fue de 4° C (dos positivos y dos negativos). Con esto se logra que a pesar de que
la señal del termopar varié dentro de este rango de histéresis, la servo válvula
mantendrá su posición sin ningún cambio.
Para la programación del Punto de Ajuste se ingresó un controlador numérico en el
cual se asigna la temperatura requerida del sistema, posteriormente para el
establecimiento de la histéresis se colocaron bloque matemáticos de SUMA y
RESTA, siendo estos los que le dan mayor tolerancia al Punto de Ajuste.
Estos rangos de histéresis a simple vista no son apreciables es por eso que se
decidió a crear indicadores de los valores alto y bajo del Punto de Ajuste.
Al tener el valor del punto de ajuste y el de la señal analógica del termopar se
compran en el bloque IN RANGE AND COERCE FUNCTION el cual determina si el
valor ingresado en este caso la señal del termopar, se encentra dentro del rango
ingresado, si esto resulta verdadero mandará un valor booleano”1”. Todas estas
señales son indicadas en una sola grafica de tiempo real, para que el conjunto de
señales y valores ingresen en la gráfica se utiliza el bloque BUNDLE FUNCTION.

62
Figura 2. 23Generación del punto de ajuste.
3.- Lectura del Potenciómetro (Retroalimentación)
Al igual que se realizó con la lectura del termopar, la entrada del potenciómetro es
una señal análoga, esta sirve para la retroalimentación de la posición exacta de la
válvula.
Se crea un bloque READ de lectura con su respectivo control numérico el cual
asigna el número de pin de entrada de datos, en este caso ocuparemos el pin
número 2.
La señal generada del bloque puede ser apreciada mediante tres indicadores los
cuales indican una diferencia de potencial, la posición de la servo válvula y una
gráfica donde muestra estos valores en tiempo continuo.
Al final todo se une con su respectivo CLOSE para mandar estás señales a los
puertos de salida análogos de la tarjeta.

63
Figura 2. 24 Lectura del punto de ajuste (retroalimentación).
4.- Lógica de seguridad
La servo válvula contiene limites mecánicos a los cuales es necesario y de vital
importancia no llegar a ellos o sobre pasarlos, ya que si esto llegara a suceder se
puede dañar el motor reductor que es el elemento que le otorga movimiento a la
servo válvula, o incluso la misma válvula podría sufrir daños ya que como se
encuentra a altas temperaturas el metal es más maleable.
Gracias a que el eje del moto reductor tiene una relación de movimiento 1:1 con el
eje del potenciómetro, existe una relación entre el porcentaje de apertura de la servo
válvula y la cantidad de voltaje generada por el potenciómetro que es alimentado
por una diferencia de potencial.
El limite mecánico de la apertura de la servo válvula entregan un valor máximo de
2.1 Vpot este motivo se adiciono un límite de -0.2 V, y así evitar que la servo válvula
llegara a su 100% de abertura por efecto de inercia, ya que si no se tiene esta
precaución, además de afectar la misma composición de la servo válvula, se puede
llegar a quemar el motor porque existe un límite mecánico que genera un paro
forzado.

64
Este límite máximo se programa a través de los bloque de comparación MAYOR
QUE y MENOR QUE, los cuales especifican el valor del que no se debe de pasar
y a través de un bloque AND nos daba la instrucción de comparación, si la variable
se encuentra dentro del Set Point la servo válvula debe de des energizarse; si esta
excede el valor del límite máximo, debe de activar la inversión de giro y así regresar
a su rango de operación normal, para seguir tratando de ajustarse al Punto de
Ajuste.
Figura 2. 25Lógica de seguridad.
Este mismo diseño de programación se utilizó para la lógica del límite inferior de
seguridad, solamente que aquí, por tratarse de un valor mínimo de 0.07 V. y
tomando en cuenta los mismos +0.2V, se asignó un valor minio de 0.09V, con lo
cual nos asegurábamos de que la válvula nunca cerrara totalmente y así evitar
problemas en el sistema. De igual forma, si la señal llegara a salirse del valor
mínimo, este tendrá que hacer los ajustes para volver a entrar al rango de operación
y tratar de establecerse al Punto de Ajuste.
5.- Sistema de Control
Una vez establecidas las condiciones de operación del punto de ajuste, de las
señales obtenidas y los límites de seguridad del prototipo de la válvula, se procede
con la realización del bloque PID, este bloque permite la selección del tipo de control

65
que se desee aplicar a dicho sistema, para nuestro caso ocuparemos el algoritmo
de control Proporcional Integral (PI).El bloque PID también cuenta con el valor del
punto de ajuste y la señal obtenida, en este caso la señal del termopar (mV). La
generación y manipulación de las ganancias del sistema para la compensación del
mismo, son realizadas a través del bloque PID GAINS, este bloque es generado del
bloque PID como controlador indicador, y es el elemento del programa que nos
permite la visualización y manipulación de las ganancias del sistema.
Por último en el esquema también se muestran los bloques de control de tiempo de
procesamiento en la estructura WHILE LOOP, así como los bloques de control del
sistema de paro STOP.
El conjunto e interconexión de cada uno de los sub sistemas de lectura, escritura,
operaciones y control dan como resultado en su totalidad el sistema de control y
temperatura que deseamos e incorporamos en el prototipo de colector solar.
Figura 2. 26 Sistema de seguridad.

66
2.6.3.- Diagrama de conexiones para adquisición de datos y etapa de potencia.
Como integración del prototipo de válvula, la adquisición de datos, etapa de potencia
el software y la interfaz humano-máquina se utiliza electrónica para realizar la
lectura de las señales obtenidas.
Figura 2. 27 Conexión electrónica.
Como se sabe, el termopar envía una diferencia de potencial como resultado de la
medición de temperatura, se utiliza un circuito integrado AD594 para amplificar
dicho valor de voltaje.
Se realiza la lectura del termopar y el potenciómetro de la válvula para el software
en Labview® por medio de la tarjeta Arduino®. Posteriormente, se envían las
señales de salida para la inversión de giro del motor de CD que controla el
movimiento del prototipo de válvula a un puente H mediante un circuito integrado

67
L298 que proporciona potencia al motor, además de que controla la inversión de
giro. La salida se envía al motor de CD.
2.6.4.- Interfaz humano máquina (HMI).
Una interfaz de usuario asistida por ordenador, actualmente una interfaz de uso,
también conocida como interfaz humano-máquina (IHM), forma parte del programa
informático que se comunica con el usuario. En ISO 9241-110, el término interfaz
de usuario se define como "todas las partes de un sistema interactivo (software o
hardware) que proporcionan la información y el control necesarios para que el
usuario lleve a cabo una tarea con el sistema interactivo". La interfaz de usuario /
interfaz humano-máquina (HMI) es el punto de acción en que unapersona entra en
contacto con una máquina. El caso más simple es el de un interruptor: No se trata
de un humano ni de una "máquina" (la lámpara), sino una interfaz entre los dos.
Para que una interfaz humano-máquina (HMI) sea útil y significativa para las
personas, debe estar adaptada a sus requisitos y capacidades.(Copadata, 2013)
Tipos de HMI.
Desarrollos a medida. Se desarrollan en un entorno de programación gráfica
como VC++, Visual Basic, Delphi, etc.
Paquetes enlatados HMI. Son paquetes de software que contemplan la
mayoría de las funciones estándares de los sistemas SCADA. Ejemplos son
FIX, WinCC, Wonderware, etc.
Funciones de un Software HMI.

68
Monitoreo. Es la habilidad de obtener y mostrar datos de la planta en tiempo
real. Estos datos se pueden mostrar como números, texto o gráficos que
permitan una lectura más fácil de interpretar.
Supervisión. Esta función permite junto con el monitoreo la posibilidad de
ajustar las condiciones de trabajo del proceso directamente desde la
computadora.
Alarmas. Es la capacidad de reconocer eventos excepcionales dentó del
proceso y reportar estos eventos. Las alarmas son reportadas basadas en
límites de control preestablecidos.
Control. Es la capacidad de aplicar algoritmos que ajustan los valores del
proceso y así mantener estos valores dentro de ciertos límites. Va más allá
del control de supervisión removiendo la necesidad de interacción humana.
Sin embargo la aplicación de esta función desde un software corriendo en
una PC puede quedar limitada por la confiabilidad que quiera obtenerse del
sistema.
Históricos. Es la capacidad de muestrear y almacenar en archivos, datos del
proceso a una determinada frecuencia. Este almacenamiento de datos es
una poderosa herramienta para la optimización y corrección de
procesos.(Universidad Nacional de Quilmes, 2013)
El lenguaje de programación gráfico LabView de National Instruments® es un
programa que permite diseñar interfaces usuario que pueden fácilmente recibir
información del proceso y presentarla ya sea gráficamente, numéricamente o de
otros tipos, según convenga. Como es de esperar, también permite al usuario
ingresar información que puede modificar el comportamiento del sistema; esta

69
información puede ser procesada utilizando las diferentes funciones disponibles en
LabView®, para desarrollar algoritmos de control de procesos.(Tamani, 2009).
La HMI adaptada para nuestro control muestra los parámetros más indispensables
para el operador, los cuales son: la temperatura medida en tiempo real, indicadores
si se encuentra prendida o apagada, la apertura de la válvula y el comportamiento
de la temperatura hasta lograr su punto de ajuste, ya que esta debe de ser más
didáctica y entendible para que se pueda utilizar con facilidad. Como se visualiza a
continuación.
Figura 2. 28Interfaz Humano-Maquina.

CAPÍTULO III: RESULTADOS Y
OBSERVACIONES.

71
3.1 OBTENCIÓN DE RESULTADOS.
En la realización del proyecto, se obtuvieron resultados diferentes de los esperados,
ya que al poner en práctica cada idea o supuesta solución se presentaron problemas
que no se tenían contemplados en la planeación del funcionamiento.
3.2MEDICIONES DEL POTENCIÓMETRO.
Se realizaron mediciones de resistencia en el potenciómetro, para determinar la
resistencia real mínima y máxima, y así obtener el valor medio de la resistencia del
potenciómetro para ajustarlo a la mitad y adaptarlo en esa posición media a la
posición media aproximada de la apertura de la válvula. Se sabe que el
potenciómetro de precisión tiene una resistencia de 10 KΩ, su alcance es de 10
vueltas y el voltaje con que se va a alimentar es de 5 V. A continuación se muestran
los datos esperados.
Tabla 3. 1Mediciones de resistencia del potenciómetro esperado.
Resistencia mínima Resistencia media Resistencia máxima
0 KΩ 5 KΩ 10 KΩ
Tabla 3. 2Mediciones de voltaje de los potenciómetros esperados.
Voltaje mínimo Voltaje medio Voltaje máximo
0 V 2.5 V 5 V
Al medir el valor de resistencia del potenciómetro, aplicar voltaje a éste y medir su
respuesta repetidas veces, se calculó el promedio de dichas mediciones y se
obtuvieron los siguientes datos.

72
Tabla 3. 3Mediciones reales de resistencia del potenciómetro.
Resistencia mínima Resistencia media Resistencia máxima
0.08 KΩ 4.45 KΩ 9.65 KΩ
Tabla 3. 4Mediciones reales de voltaje del potenciómetro.
Voltaje mínimo Voltaje medio Voltaje máximo
0 V 2.25 V 4.95 V
Los valores esperados son diferentes a los obtenidos, ya que al utilizar el multímetro
y medir los valores del potenciómetro se comprobó que existe una diferencia, debido
a que no es exacto el valor físico obtenido con el valor que se le asigna al
potenciómetro aunque es un valor aproximado.
La fuente de alimentación de 5 Volts, en realidad entregó un voltaje de 4.95 Volts,
esto también influye en el comportamiento del potenciómetro para entregar los
valores medidos. La diferencia entre los valores esperados y obtenidos es poca,
podemos observar que el comportamiento del potenciómetro es lineal, por esta
razón se contó el número de vueltas aproximadas para situarlo a la mitad (5 vueltas).
Estos valores posteriormente se utilizaron para posicionar correctamente el
potenciómetro en proporción a la válvula.
3.3LECTURA DE SEÑALES ANALÓGICAS EN ARDUINO® Y LABVIEW®.
El desarrollo del programa en Labview® es el que presentó más errores en la
implementación de los elementos electrónicos necesarios para el accionamiento y
control de la válvula. Las señales analógicas presentan una variación continua en
su manipulación, es difícil que permanezca estable en un valor.

73
Se utiliza la primera entrada analógica para el termopar como sensor de
temperatura, que es la variable que se desea controlar, se supone que la variación
entre sus valores de entrada son mínimos y no existe mucha diferencia entre estos.
Como segunda entrada analógica se lee la señal del potenciómetro, que indica la
posición de la válvula y se realiza la lógica que ordena al controlador la acción a
realizar, apertura o cierre, de este modo se realiza la acción de control para llegar
al punto de ajuste leyendo la variable de temperatura.
Se supone que las señales se van a conectar a la tarjeta de adquisición de datos
para ser leídas e interpretadas por el software.
Se realiza la prueba de lectura de cada elemento que entrega señal analógica, se
rectifica que todo esté funcionando correctamente. La señal del potenciómetro es
estable y su variación es mínima, se obtienen datos de lectura correcta y
aproximada.
Se lee la señal de entrada analógica del termopar en la tarjeta, se observa que la
señal presenta muchas variaciones, ya que la lectura de datos es continua en lapsos
muy cortos de tiempo, además de que el termopar es muy sensible a variaciones y
la tarjeta de adquisición de datos realiza una medición con una alta resolución,
entonces la señal se mide en centésimas después del punto
Al conectar las dos señales en los puertos de entrada analógica a la tarjeta Arduino®
la señal de lectura se ve afectada una por la otra, al inicio, las dos señales actúan
normalmente, es decir, su señal no varía ni cambia. El problema comienza cuando
se comienza a variar el potenciómetro, entonces su movimiento causa una
perturbación considerable en la medición del termopar, porque su rango de
variación de temperatura afectó hasta 10°C en una medición. A continuación se
muestra la perturbación en la señal.
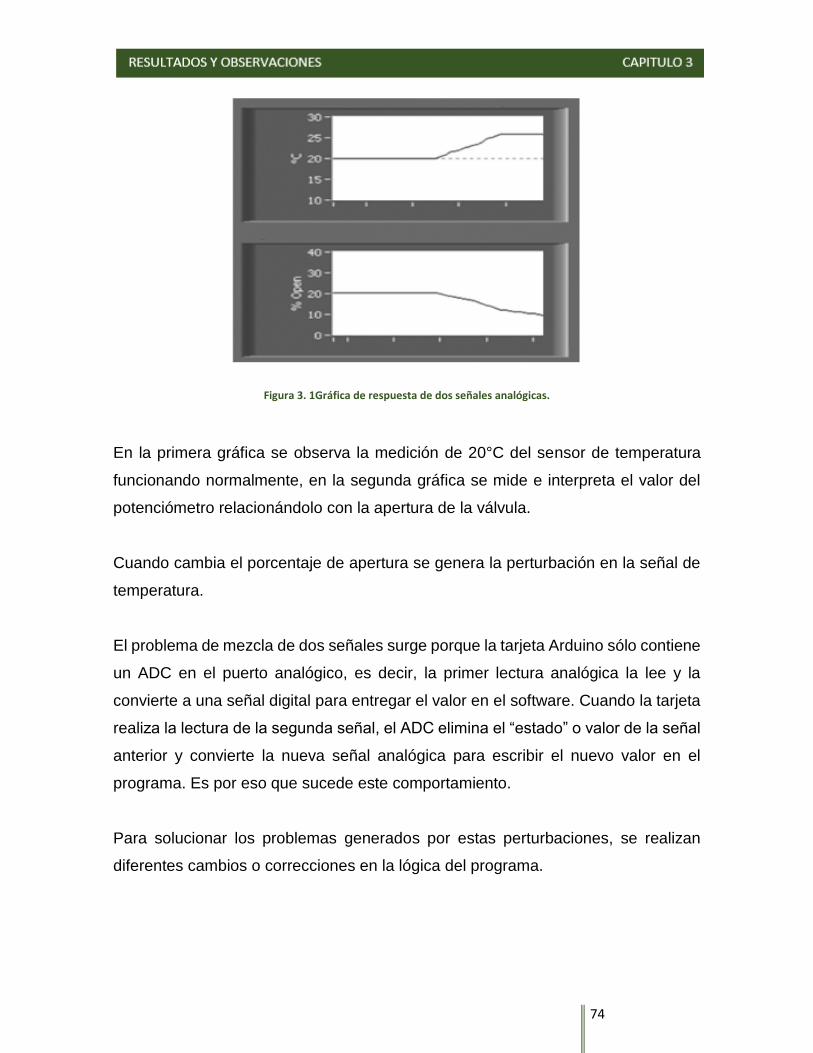
74
Figura 3. 1Gráfica de respuesta de dos señales analógicas.
En la primera gráfica se observa la medición de 20°C del sensor de temperatura
funcionando normalmente, en la segunda gráfica se mide e interpreta el valor del
potenciómetro relacionándolo con la apertura de la válvula.
Cuando cambia el porcentaje de apertura se genera la perturbación en la señal de
temperatura.
El problema de mezcla de dos señales surge porque la tarjeta Arduino sólo contiene
un ADC en el puerto analógico, es decir, la primer lectura analógica la lee y la
convierte a una señal digital para entregar el valor en el software. Cuando la tarjeta
realiza la lectura de la segunda señal, el ADC elimina el “estado” o valor de la señal
anterior y convierte la nueva señal analógica para escribir el nuevo valor en el
programa. Es por eso que sucede este comportamiento.
Para solucionar los problemas generados por estas perturbaciones, se realizan
diferentes cambios o correcciones en la lógica del programa.

75
Se compensa la variación natural de la señal del termopar aplicando como lógica
redondeo de valores para que la señal reduzca su amplitud debido a la lectura de
valores en pequeñas variaciones de centésimas y solo entregue décimas.
Se analiza la magnitud de la perturbación a lo largo del movimiento del
potenciómetro y la variación en la medición. Se obtiene la siguiente relación.
Tabla 3. 5Mediciones del potenciómetro y termopar.
Voltaje del potenciómetro Temperatura del termopar
0 V 20 °C
0.5 V 19.3 °C
1 V 18 °C
1.5 V 18.9 °C
2 V 17.2 °C
2.5 V 15.8 °C
3 V 14.6 °C
3.5 V 12.3 °C
4 V 11.5 °C
4.5 V 10.9 °C
5 V 9.6 °C
Se observa que la variación del voltaje es muy alta en la posición de 5V, y el valor
medio del potenciómetro, que es adaptado físicamente con respecto a la válvula
para posicionar como valor medio con respecto a la modulación de la válvula, que
en este caso no es posible realizar debido a la alta perturbación en la temperatura.
Para la compensación de la temperatura se toma en cuenta un rango óptimo de
operación, como valores de tolerancia, debido a la variación de temperatura que se
presenta normalmente principalmente a la pérdida calorífica por el medio ambiente
u otros factores que presenta esta variable con respuesta lenta. A la medición
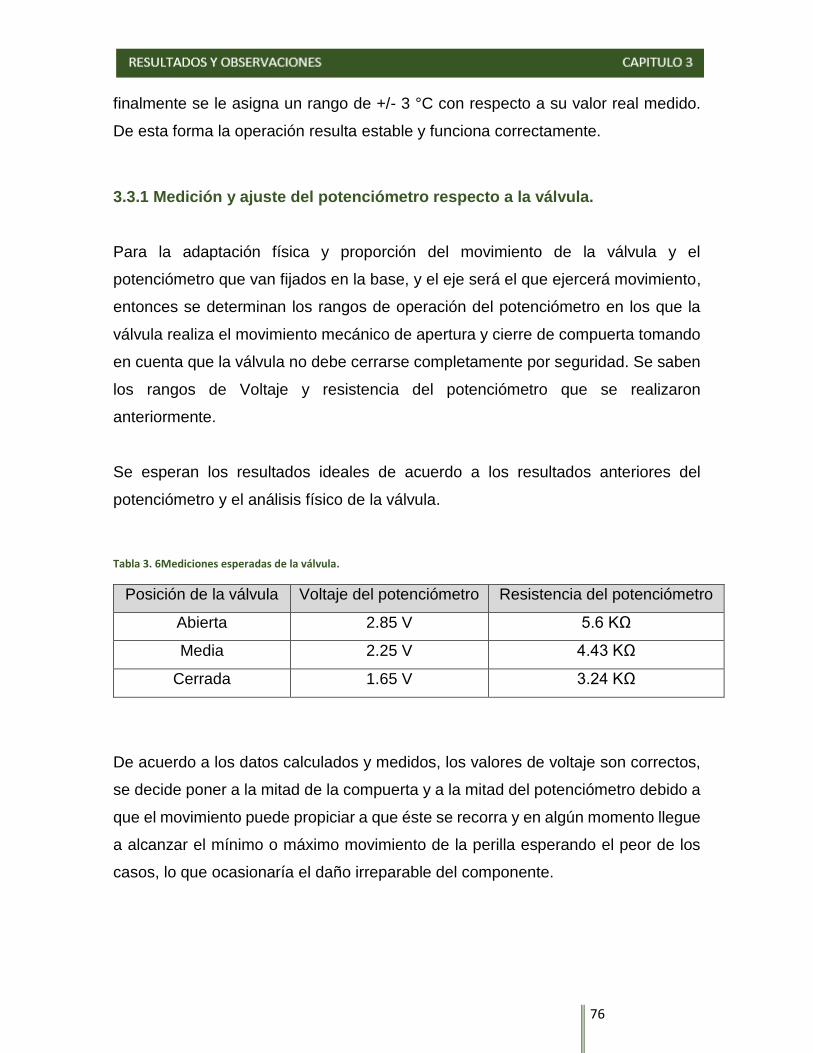
76
finalmente se le asigna un rango de +/- 3 °C con respecto a su valor real medido.
De esta forma la operación resulta estable y funciona correctamente.
3.3.1 Medición y ajuste del potenciómetro respecto a la válvula.
Para la adaptación física y proporción del movimiento de la válvula y el
potenciómetro que van fijados en la base, y el eje será el que ejercerá movimiento,
entonces se determinan los rangos de operación del potenciómetro en los que la
válvula realiza el movimiento mecánico de apertura y cierre de compuerta tomando
en cuenta que la válvula no debe cerrarse completamente por seguridad. Se saben
los rangos de Voltaje y resistencia del potenciómetro que se realizaron
anteriormente.
Se esperan los resultados ideales de acuerdo a los resultados anteriores del
potenciómetro y el análisis físico de la válvula.
Tabla 3. 6Mediciones esperadas de la válvula.
Posición de la válvula Voltaje del potenciómetro Resistencia del potenciómetro
Abierta 2.85 V 5.6 KΩ
Media 2.25 V 4.43 KΩ
Cerrada 1.65 V 3.24 KΩ
De acuerdo a los datos calculados y medidos, los valores de voltaje son correctos,
se decide poner a la mitad de la compuerta y a la mitad del potenciómetro debido a
que el movimiento puede propiciar a que éste se recorra y en algún momento llegue
a alcanzar el mínimo o máximo movimiento de la perilla esperando el peor de los
casos, lo que ocasionaría el daño irreparable del componente.

77
Figura 3. 2Ajuste en válvula y potenciómetro.
Debido a que al aplicar éste método al software ocurre el problema de las dos
señales analógicas, como se menciona, se tendrá que utilizar un rango diferente al
planeado.
De acuerdo a las mediciones, el rango adecuado para la compensación y la mínima
variación en la temperatura es de 0 V a 2 V en la señal del potenciómetro.Adaptando
el rango máximo de los valores del Voltaje dentro del rango, se obtiene el resultado.
Tabla 3. 7Mediciones obtenidas en la válvula.
Posición de la válvula Voltaje del
potenciómetro Voltaje de seguridad
Abierta 0.8 V 0.9 V
Cerrada 2 V 1.9 V
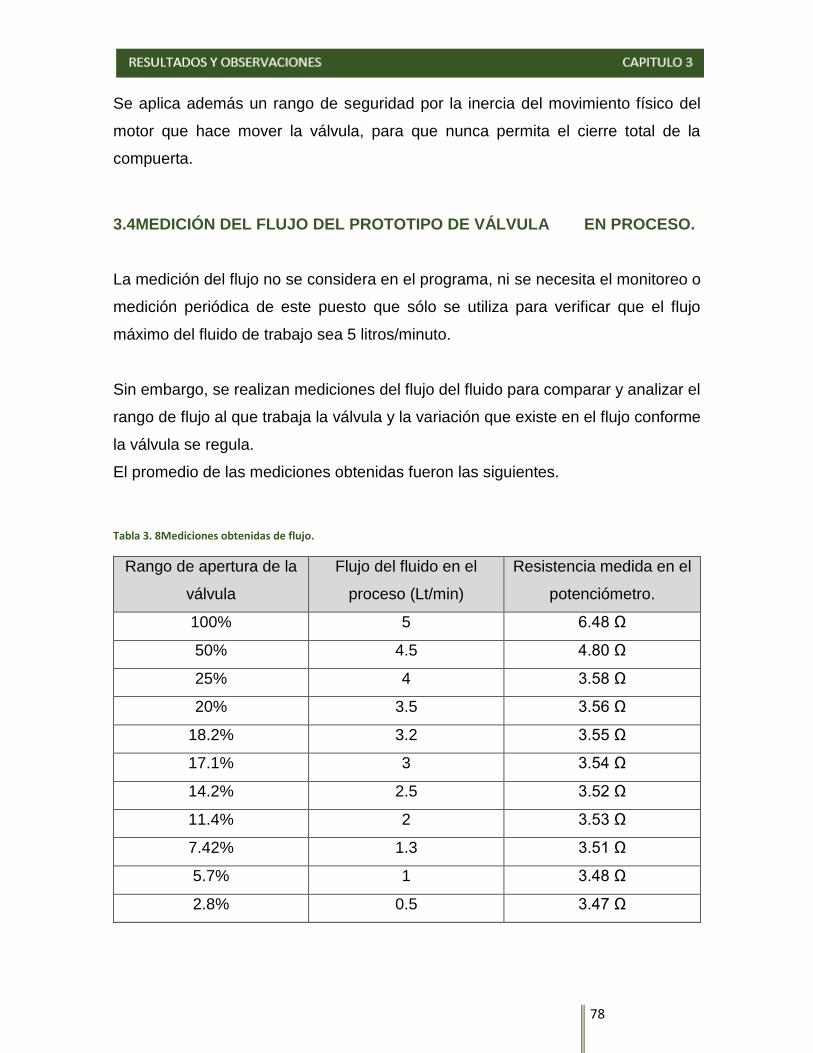
78
Se aplica además un rango de seguridad por la inercia del movimiento físico del
motor que hace mover la válvula, para que nunca permita el cierre total de la
compuerta.
3.4MEDICIÓN DEL FLUJO DEL PROTOTIPO DE VÁLVULA EN PROCESO.
La medición del flujo no se considera en el programa, ni se necesita el monitoreo o
medición periódica de este puesto que sólo se utiliza para verificar que el flujo
máximo del fluido de trabajo sea 5 litros/minuto.
Sin embargo, se realizan mediciones del flujo del fluido para comparar y analizar el
rango de flujo al que trabaja la válvula y la variación que existe en el flujo conforme
la válvula se regula.
El promedio de las mediciones obtenidas fueron las siguientes.
Tabla 3. 8Mediciones obtenidas de flujo.
Rango de apertura de la
válvula
Flujo del fluido en el
proceso (Lt/min)
Resistencia medida en el
potenciómetro.
100% 5 6.48 Ω
50% 4.5 4.80 Ω
25% 4 3.58 Ω
20% 3.5 3.56 Ω
18.2% 3.2 3.55 Ω
17.1% 3 3.54 Ω
14.2% 2.5 3.52 Ω
11.4% 2 3.53 Ω
7.42% 1.3 3.51 Ω
5.7% 1 3.48 Ω
2.8% 0.5 3.47 Ω
79
Se puede observar que la variación de voltaje se produce realmente dentro del 20%
de apertura de la válvula, donde el voltaje del potenciómetro varía en décimas de
voltaje esto sucede principalmente porque el flujo que se maneja en el proceso es
muy pequeño.
3.5MONTAJE DE LA SERVO VÁLVULA EN EL PROCESO.
Cavitación
Después de diseñar, armar y probar la válvula se monta en el proceso, donde es
adecuado posicionarla. Se debe considerar que el proceso deberá estar bajo el
sol, y deberá funcionar continuamente a lo largo del día.El prototipo de válvula
está ubicada después de la bomba que envía flujo y presión para circular el fluido
a través de todo el proceso.Se espera que se instale la válvula y comience a
funcionar en el proceso.
Al instalar el prototipo de válvula en la tubería y comenzar el proceso, la base vibra
debido a la bomba que está cerca de ésta, lo que provoca mucho movimiento.La
base se mueve demasiado y no permanece firme en el proceso. Es probable que
se dañen los componentes, se desconecten los circuitos y el control de la válvula
no funcione correctamente, tenga muchos errores y todo el sistema se vuelva
inestable.
La solución para esta situación se centra en la base del prototipo de válvula, ya que
está compuesta por aluminio y es muy débil para soportar el peso de los elementos
y la vibración que provoca la bomba.Se adaptaron soportes en los costados de la
base para que la base no recibiera el impacto de la vibración tan directo, ya que es
peligroso. Con la implementación del diseño se redujo considerablemente el
movimiento, no hay riesgo que la válvula se dañe.

80
Figura 3. 3 Prototipo de válvula.
A pesar de las mejoras, la vibración continúa, pero no hay solución ya que es la
reacción natural de la bomba, y no afecta en el comportamiento y control del
prototipo de válvula.
Figura 3. 4 Prototipo de válvula instalada en proceso.

81
Ajustes del control de la válvula.
El control del prototipo de válvula se conforma por circuitería: etapa de potencia
para el motor, la tarjeta de adquisición de datos y Labview® para realizar la lógica y
directamente el control.
Se espera aplicar un control Proporcional Integral, el control Proporcional porque
mejora la velocidad de respuesta, reduce el error, a pesar de que aumentan las
oscilaciones, principalmente genera un sobre impulso, pero el control Integral
elimina el error, por lo tanto, disminuye el sobre impulso.En resumen en el control
PI decrece el tiempo de subida, crece el sobre impulso, aumenta el tiempo de
estabilización y se elimina el error en estado estable. Esto es suficiente para la
modulación del prototipo de válvula.
Al realizar el programa se aplica correctamente la lógica, al realizar el control
funciona el prototipo, pero al ajustar las ganancias PI en el control no hay variación
o cambios en la respuesta del sistema.Esto sucede porque los elementos del
sistema son muy pequeños, en este caso, se controla un fluido pequeño, entonces
la válvula siempre tiene una respuesta rápida, es decir, no se necesita agregar
ganancias porque su función cumple con lo requerido.
En caso de solicitar una medición local de temperatura se puede realizar
sustituyendo el termopar por un termómetro bimetálico porque no necesita de
elementos adicionales para su uso, ya que cuenta con una carátula amplia desde la
cual se puede hacer la medición directa de la temperatura. Se realiza una lectura
rápida, eficiente y confiable sin la necesidad de monitorear dicha temperatura.
El termómetro bimetálico adecuado para el proceso posee como características:

82
Carátula de 2” (51 mm), conexión NPT (Posterior) con lente de Cristal, rango de 0
a 400° C, conexión Inferior de 1/2” NPT, fabricado en Acero Inoxidable AISI 316,
vaina de 1”.
CAPÍTULO IV: ANÁLISIS DE COSTOS Y
BENEFICIOS.

84
Desde las últimas décadas del siglo XX la humanidad comenzó a
tomar conciencia de los problemas ambientales, económicos y de sustentabilidad
que implicaban continuar basando todo el consumo energético mundial
principalmente en la explotación de los combustibles fósiles. Como consecuencia
se comenzó la implantación, lenta pero progresiva, de unas energías más limpias,
las Energías Renovables.
Tomando esto en consideración el Laboratorio de Ingeniería Térmica e Hidráulica
Aplicada de la sección de posgrados de ESIME Zacatenco llevará a cabo la
realización de un prototipo de energía alternativa, el cual consiste en la obtención
de energía calorífica a través de la radiación solar.
Para la elaboración de este prototipo no sólo se necesita tener en cuenta el
conocimiento técnico, sino de igual manera es necesario conocer si el proyecto será
rentable, es por eso que generalmente para este tipo de proyectos se necesita llevar
a cabo un estudio de análisis de costos – beneficio o comúnmente llamado ACB.
En este estudio se pretende analizar las decisiones fundamentales que se tomaron
en cuenta, para lograr el objetivo de obtener el nivel máximo de eficacia económica
y máxima ganancia.
Se debe de tomar en consideración que la ganancia total de la implementación
depende de la relación entre el capital invertido y el ingreso total alcanzado. El
precio de venta del prototipo en un futuro, determinará los ingresos de los
adquiridos. Por lo tanto, los costos e ingresos resultan ser dos elementos
fundamentales para decidir el nivel de producción de máxima ganancia.
4.1 Comparación de costos.

85
El prototipo de colector solar que se tenía con anterioridad era un sistema poco
eficiente es por esta razón que genero una mejora al sistema en cuanto a la
medición y control del sistema.
Para el control del flujo del aceite el principal elemento de que se utilizó dentro de
la implementación de la mejora del sistema fue una servo válvula la cual fue
diseñada y construida.
Existe una gran cantidad de servo válvulas de control comercializadas, dentro de
esta se encuentra la servo válvula GEMÜ 548. Esta válvula de control por sus
características se ajusta a nuestro proceso de calentamiento de agua.
Figura 4. 1 Servo válvula de línea.
Características.
Función de Regulación.
Motorizada 2/2 vías.
86
Función de OPEN/CLOSE o versión del CONTROL.
Parámetros de control fácilmente ajustables.
Control optimizado de la inicialización y de la válvula.
Parametrización durante la operación.
Imitación del esfuerzo de torsión.
Limitación electrónica de la abertura y del movimiento cerrado.
Módulo integrado opcional de la fuente del estado de excepción con
la posición seleccionable de la seguridad.
Versión con los bramidos (opción).
Descripción de la válvula de línea.
La válvula motorizada 2/2 vías de GEMÜ 548 tiene un actuador linear eléctrico
compacto con un motor diseñado para los voltajes de funcionamiento de la C.C. y
de la CA. El engranaje integrado traduce el movimiento de motor rotatorio a un
movimiento linear. El actuador está disponible pues una versión abierta/cercana o
con un posicionador integrado y un regulador de proceso adicional.
El huso de la válvula es sellado por un casquillo de empaquetadura autoajustable
que proporciona mantenimiento bajo y el lacre confiable del huso de la válvula
incluso después una vida de servicio larga. El anillo del limpiador cabido delante del
casquillo de empaquetadura lo protege contra la contaminación y el daño.
Una vez recopilados los datos requeridos que arroja el proceso de captación de
radiación solar así como los de la servo válvula de línea requerida en este proceso
se realiza una estimación acerca de si sería conveniente la implementación de la
válvula de línea en el proceso.
Basándonos en estos datos se tomó la decisión de diseñar y construir un prototipo
de válvula de control, que cumpla con las características necesarias para para la
instalación de la misma en el proceso, como son los rangos de operación y
características de los materiales.

87
Figura 4. 2 Prototipo de válvula construido.
Características.
Función de Regulación.
Diámetro ½” - 13mm.
Motorizada 2/2 vías.
Alimentación: 9 VCD - 5mA.
Material Latón.
Medio ambiente temperatura -20°C a 180°C.
Montado Roscado.
Tiempo de Apertura/Cierre: 5.3 s.
Grado de protección: 3mm.
Función regulación por módulo de control remoto.
Parámetros de control fácilmente ajustables.
Parametrización durante la operación.
Limitación de seguridad por software.
El posicionador y el regulador se encuentran sincronizados.
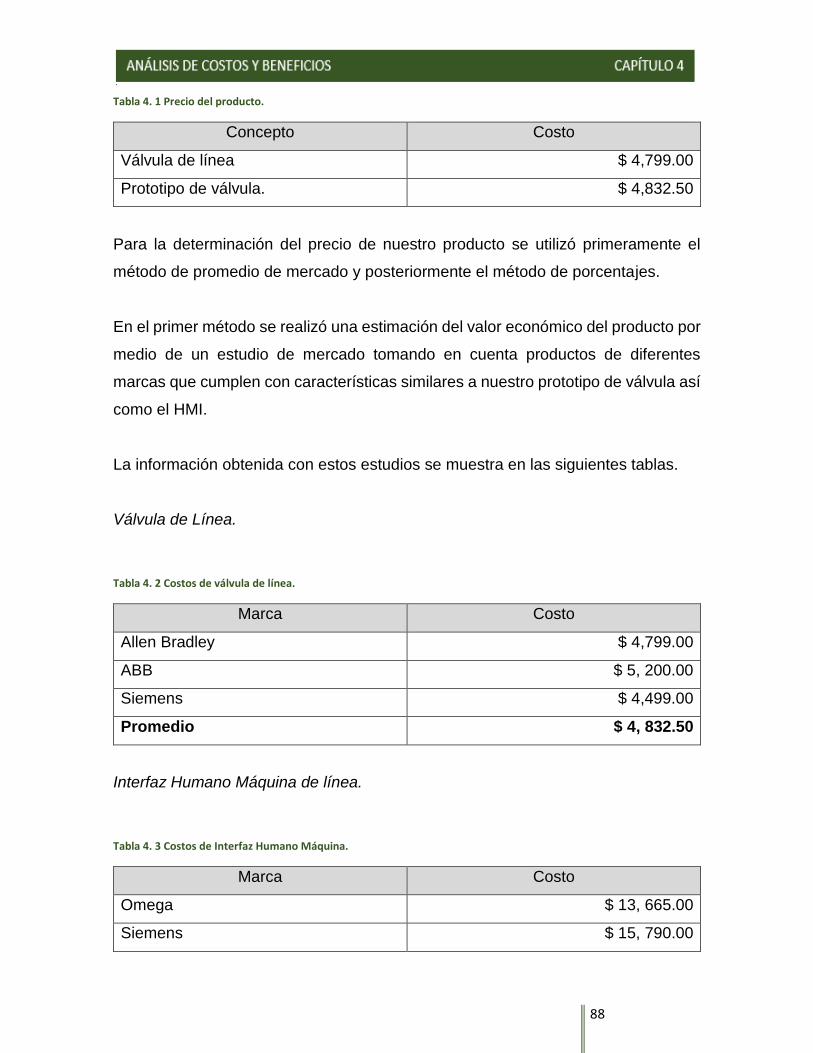
88
Tabla 4. 1 Precio del producto.
Concepto Costo
Válvula de línea $ 4,799.00
Prototipo de válvula. $ 4,832.50
Para la determinación del precio de nuestro producto se utilizó primeramente el
método de promedio de mercado y posteriormente el método de porcentajes.
En el primer método se realizó una estimación del valor económico del producto por
medio de un estudio de mercado tomando en cuenta productos de diferentes
marcas que cumplen con características similares a nuestro prototipo de válvula así
como el HMI.
La información obtenida con estos estudios se muestra en las siguientes tablas.
Válvula de Línea.
Tabla 4. 2 Costos de válvula de línea.
Marca Costo
Allen Bradley $ 4,799.00
ABB $ 5, 200.00
Siemens $ 4,499.00
Promedio $ 4, 832.50
Interfaz Humano Máquina de línea.
Tabla 4. 3 Costos de Interfaz Humano Máquina.
Marca Costo
Omega $ 13, 665.00
Siemens $ 15, 790.00

89
Allen Bradley $ 12, 482.00
Promedio $ 13, 979.00
El segundo método (método de porcentajes) se aplicó una vez obtenido el valor
bruto del prototipo de válvula y HMI, en el cual se agrega un margen de utilidad,
este valor agregado representa el costo de ingeniería, insumos ymano de obra.
Dicho margen de utilidad se calculó en un 30%, esto debido a que si hay ofertas o
promociones por competencia del mercado no existan pérdidas considerables y se
conserve un margen de ganancia. La instalación del sistema de control en el
proceso requerido, genera un costo adicional.
Tabla 4. 4 Costos de prototipo de válvula.
Concepto Costo
Prototipo de válvula $ 4, 832.50
HMI $ 13, 979.00
P. bruto. $ 18, 811.50
Ingeniería $ 5, 643.50
Instalación $ 7,000.00
Total $ 24, 455.00
En conclusión se puede afirmar que la utilización del prototipo de válvula de línea a
comparación de la construida para el proceso, no es viable ya que las características
de la válvula de línea están sobre dimensionadas al proceso, así también el control
de la válvula de línea es en campo y no en modulo remoto como en la diseñada, por
lo cual no puede realizar una comparación automática de las variables a medir y
aplicar un control, a pesar de esto, el prototipo de válvula de línea tiene un costo
muy elevado en comparación con la elaborada, esto reitera y justifica la toma de
decisión en cuanto al elemento de regulación de flujo.

90
Sensores de temperatura.
Otra aportación importante que se hace en nuestra propuesta de ingeniería es la
implementación de sensor de temperatura conectado dentro del proceso, este
sensor tipo J es el indicado para este proceso ya que su rango de temperatura
soporta los grandes cambios de temperatura durante el tiempo de trabajo.
En comparación con su anterior modo de medir la temperatura, que consistía en
abrir la tapa del tanque de almacenamiento y colocar un termómetro de mercurio
(termómetro de laboratorio) en la tubería de entrada al tanque, se obtuvieron
grandes beneficios. Los cuales son:
Una medición precisa y continúa de la temperatura en cualquier momento,
debido a que el termopar tiene mayor resolución y sensibilidad.
Se reducen las pérdidas de calor del aceite orgánico sintético que se
producían cada que el tanque se abría.
Mayor seguridad para el operador ya que no se encuentra en contacto directo
con el fluido de trabajo.
Al obtener una señal eléctrica, se puede monitorear la temperatura desde
una computadora o en este caso la HMI. Y dentro de la misma se puede
calibrar y/o compensar.
Seguridad para el equipo y fluido de trabajo, ya que si no se abre el tanque
del almacenamiento se reduce la contaminación del mismo.
En ambos medidores de temperatura se realiza un gasto inicial único, y a primera
se puede observar el primer beneficio del termopar ya que tiene un costo menor al
termómetro de mercurio, esto es hablando económicamente, pero haciendo la
comparación de las demás propiedades que ambos ofrecen se pueden resaltar los
demás beneficios que el termopar nos ofrece.

91
Tabla 4. 5 Diferencia entre medidores de Temperatura.
Termómetro de mercurio Termopar tipo J
Temperatura máx. (°C) 150 700
División de escala (°C) 1 0.001
Tiempo de medición Esporádicamente Continua
Conexión al proceso ---------- roscada / soldada
Costo unitario ($) 200 80
De acuerdo a la tabla anterior los beneficios que ofrece son de gran aportación para
el proyecto, y la ganancia además de ser monetaria, es en tiempos, seguridad y
precisión.
Figura 4. 3 Termómetro de mercurio.

92
Figura 4. 4 Termopar tipo J.
4.2IMPACTO ECONÓMICO SOCIAL Y AMBIENTAL.
Como ya se mencionó, uno de los problemas que más afecta a nuestro planeta es
la utilización de combustibles fósiles, lo cual provoca grandes cantidades de
contaminación y deterioro ambiental. Es por eso que en las últimas décadas cada
país se ha preocupado por utilizar y/o aprovechar nuevas energías, las cuales sean
renovables y/o sean más amigables con el medio ambiente. México destaca a nivel
mundial por ser uno de los países con las metas más ambiciosas en materia de
generación mediante fuentes no fósiles.(sustentable., 2015).
Basándonos en estos nuevos desarrollos, el colector solar con el que se cuenta y la
implementación de su control, automatización y aplicación de instrumentación
pretende ser partícipe de este desarrollo y así incrementar y acelerar la utilización
de las nuevas tecnologías en nuestro país y en el resto del mundo.
4.2.1 Impacto económico.
Costos fijos.

93
En este caso no se aplican los costos variables de la producción en masa, ya que
sólo es un prototipo, por lo tanto se cambiarán algunos elementos posteriormente,
y actualmente no se reproducirán válvulas, considerando el conjunto de los
elementos de la válvula como costo unitario.
Depreciación.
La depreciación es el mecanismo mediante el cual se reconoce el desgaste que
sufre un bien por el uso que se haga de él, a diferencia de la amortización que se
utiliza para activos intangibles como son las patentes, marcas etc.
Figura 4. 5 Depreciación.
Para compensar estas pérdidas a futuro del bien el cual se produjo, se realiza un
cálculo de depreciación al activo tangible, el cual puede se genera de tres maneras:
El paso del tiempo, el uso del bien, y el desuso.
El método que utilizaremos para el cálculo de la depreciación será el método de
depreciación de actividad o unidades producidas que considera la depreciación en
función de la utilización de la actividad, y no del tiempo. Por lo tanto, la vida útil del

94
activo se basará en la función del rendimiento y del número de unidades que
produce, de horas que trabaja, o del rendimiento considerando estas dos opciones
juntas.
Para la obtención de la depreciación se utiliza las siguientes formulas:
COSTO – VALOR DE DESECHO O RESIDUO= COSTO DE DEPRECIACIÓN POR
UNIDAD
𝐶𝑂𝑆𝑇𝑂 − 𝐶𝑂𝑆𝑇𝑂 𝐷𝐸 𝐷𝐸𝑃𝑅𝐸𝐶𝐼𝐴𝐶𝐼Ó𝑁
𝑈𝑁𝐼𝐷𝐴𝐷𝐸𝑆 𝑇𝐼𝐸𝑀𝑃𝑂
Para aplicación de estas fórmulas al prototipo de la válvula es necesario tomar en
cuenta en cuanto se vendió o se vendería la válvula prototipo, el tiempo de vida útil
así como el valor residual de la amortización, que en este casó resulta a 900.00
pesos en 5 años.
El valor residual es la cantidad de capital en la que venderías tus bienes,
considerando pasado el tiempo de vida útil, pero aún con un correcto
funcionamiento.
Sustituyendo cada uno de los términos anteriores, tenemos lo siguiente:
1990 𝑃𝑒𝑠𝑜𝑠 − 900 𝑃𝑒𝑠𝑜𝑠
5 𝑎ñ𝑜𝑠 = 218.00
Ahora para conocer el gasto cada año multiplicaremos el número de depreciación
por el gasto unitario obtenido, que en este caso, al tratarse de 5 años de vida útil:

95
Tabla 4. 6Cuadro comparativo de la depreciación anual.
AÑOS COSTO DESGASTE DEPRECIACIÓN
ANUAL
1 1990.00 pesos 43.60 Hrs/Maq
218.00
2 1990.00 pesos 87.20 Hrs/Maq
3 1990.00 pesos 130.8 Hrs/Maq
4 1990.00 pesos 174.4 Hrs/Maq
5 1990.00 pesos 218.0 Hrs/Maq
Como se darán cuenta, en este método no tomamos directamente un periodo de
vida útil a razón de años, tomamos en consideración el desgaste.
Cotización del prototipo de válvula y su control.
La presente propuesta abarca la fabricación de del prototipo de válvula, la
programación del control de la misma y su instalación.
Alcances de la propuesta.
Se construirá y ensamblara el prototipo de válvula, la programación necesaria para
realizar el monitoreo y control de la modulación de la válvula, así como la instalación
requerida, con el objeto de lograr un control fácil para cualquier operador.
Propuesta económica.
CONCEPTO PRECIO
Prototipo de válvula $ 1,990.00
HMI $ 5,000.00

96
Instalación $ 2,000.00
TOTAL $ 8, 990.00
* Los precios se encuentran sujetos a cambios sin previo aviso.
** En proyectos solicitados con más de 15 días de anticipación se adicionara un
15% de descuento.
*** El tiempo de entrega es de 15 días a partir de la entrega total de la información.
El Valor Presente Neto (VPN), la Tasa Interna de Rendimiento (TIR) y el Periodo de
Recuperación de la Inversión, no es posible calcularlos en este momento, ya que
se necesitan diversas pruebas para determinarlas, tales como estudio de mercado,
tiempo de vida útil real, tiempo real en que el producto se vuelve redituable, etc.
debido a que el trabajo es un prototipo, por lo tanto aún no ha salido al mercado,
además de que no está terminado y se necesitan datos y pruebas como referencia.
4.3 IMPACTO AMBIENTAL
El colector solar desarrollado en el Laboratorio de Energía Térmica e Hidráulica
Aplicada (LABINTHAP) en la Sección de Estudios de Posgrado e Investigación
(SEPI) del IPN está enfocado en el aprovechamiento de la radiación solar, sabiendo
que es la fuente de energía natural más potente y con esto sustituir las
combustiones de gas, o algún otro combustible. Viéndose ya reflejados dos grandes
beneficios:
El aprovechamiento de una energía renovable e infinita (energía solar)
Eliminar el uso de combustibles no renovables para la generación de energía.

97
El aceite sintético orgánico con el que se trabaja y por las características con las
que cuenta también contribuye en la disminución de desperdicios y contaminantes,
ya que al tener propiedades sintéticas tiene mayor tiempo de vida y por lo tanto no
se desperdicia tanto y se tiene que sustituir con menor frecuencia. Con sus
propiedades orgánicas hace que al momento de terminar su utilidad y se necesite
remplazar, este sobrante se vuelva a integrar al medio ambiente sin provocar mayor
daño, de los beneficios obtenidos por este.
De igual manera todos estos resultados que se obtiene son de gran impacto en la
sociedad ya que si la gente observa que, aunque inicialmente pueda ser un gasto
mayor al de un calentador solar convencional, esta implementación en sus sistemas
de calefacción de agua les traería grandes ganancias a mediano o largo plazo.
Todas estas ganancias se verán reflejadas en los siguientes puntos:
Reducción o eliminación de los gastos de gas LP, o gas natural que se tenía
antes de su implementación
Disminución en el consumo de energía eléctrica.
Reducción de tiempo hasta de un 500%
Puede calentar grandes cantidades de agua, ( hasta 5 veces más que un
calentador solar convencional)
Se desea que esta energía aprovechada pueda sustituir en un momento los
calentadores de agua o algún otro fluido en instalaciones que requieran una gran
demanda como hospitales, escuelas, hoteles, etc.
Con todo esto se pretende llegar a concientizar a toda la gente, de que la utilización
de combustibles no es el mejor de los caminos para producción de energía, sino
que ahora en día se pueden aprovechar las energías naturales renovables para
nuestro propio beneficio, con grandes remuneraciones en el futuro tanto
económicas como sociales y ambientales.
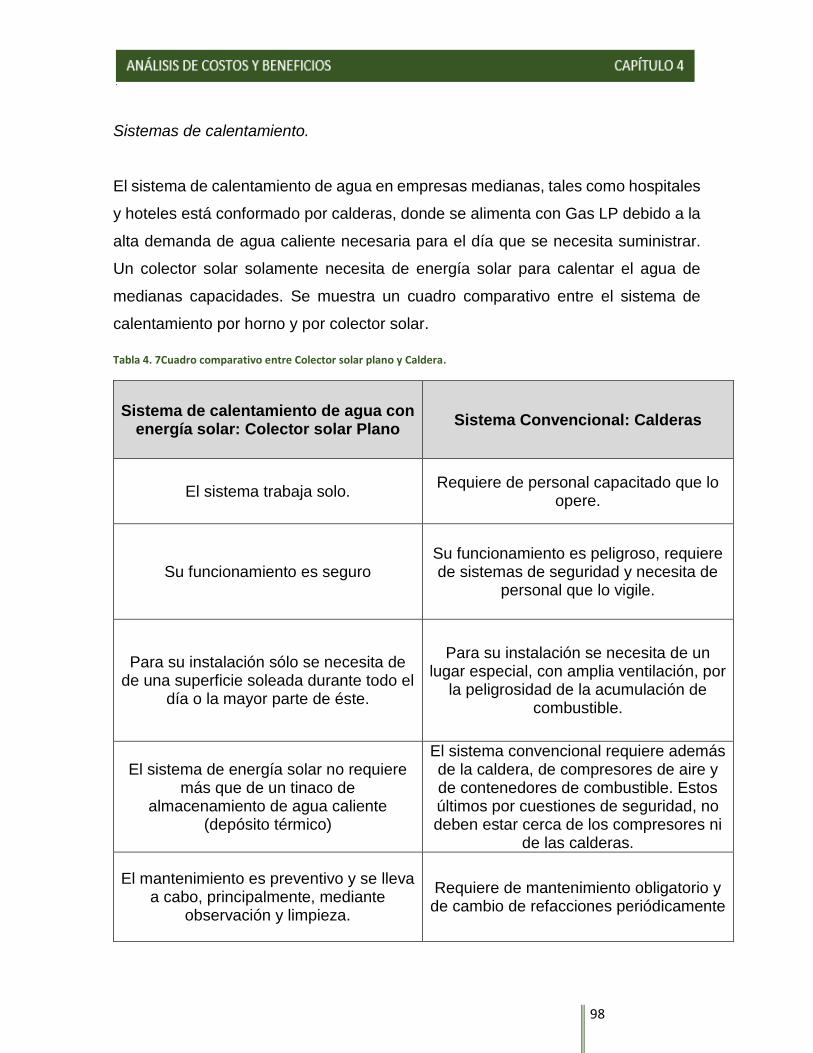
98
Sistemas de calentamiento.
El sistema de calentamiento de agua en empresas medianas, tales como hospitales
y hoteles está conformado por calderas, donde se alimenta con Gas LP debido a la
alta demanda de agua caliente necesaria para el día que se necesita suministrar.
Un colector solar solamente necesita de energía solar para calentar el agua de
medianas capacidades. Se muestra un cuadro comparativo entre el sistema de
calentamiento por horno y por colector solar.
Tabla 4. 7Cuadro comparativo entre Colector solar plano y Caldera.
Sistema de calentamiento de agua con energía solar: Colector solar Plano
Sistema Convencional: Calderas
El sistema trabaja solo. Requiere de personal capacitado que lo
opere.
Su funcionamiento es seguro Su funcionamiento es peligroso, requiere de sistemas de seguridad y necesita de
personal que lo vigile.
Para su instalación sólo se necesita de de una superficie soleada durante todo el
día o la mayor parte de éste.
Para su instalación se necesita de un lugar especial, con amplia ventilación, por
la peligrosidad de la acumulación de combustible.
El sistema de energía solar no requiere más que de un tinaco de
almacenamiento de agua caliente (depósito térmico)
El sistema convencional requiere además de la caldera, de compresores de aire y de contenedores de combustible. Estos últimos por cuestiones de seguridad, no deben estar cerca de los compresores ni
de las calderas.
El mantenimiento es preventivo y se lleva a cabo, principalmente, mediante
observación y limpieza.
Requiere de mantenimiento obligatorio y de cambio de refacciones periódicamente

99
No requiere de combustible, trabaja con energía gratuita que proviene del sol.
Requiere de gas LP para funcionar en el caso de este hotel.
4.3.1 Inversión y rentabilidad.
El ahorro de combustible genera una disminución de costos considerable, ya que
en 4 años aproximadamente se recupera el costo de implementación de un colector
solar. Dependiendo del lugar, que varía su radiación solar, el tamaño de la empresa
y cantidad de agua utilizada es el valor de inversión y rentabilidad real.
Ventajas en la utilización de colectores solares.
La alta rentabilidad para los hoteles, cuyas necesidades de agua caliente son
considerables.
El tiempo de recuperación de la inversión es corto debido a las grandes
reducciones de consumo de combustible y por ende, de dinero.
Los costos de operación son nulos, ya que su mantenimiento es básicamente
de limpieza.
La operación del equipo no es peligrosa y no requiere de sistemas especiales
de seguridad.
La fuente de energía que provee al calentador solar es gratuita, por lo que
jamás estará relacionada a fluctuaciones de precios como en el caso del gas
LP.
El sistema es ecológico, ya que no contamina en ninguno de sus procesos:
ni en su instalación ni en su utilización.

100
Su uso disminuye las emisiones locales producto de la combustión de gas, como
los óxidos nitrosos (NOx) y monóxido de carbono (CO), además de ofrecer
beneficios ambientales a nivel global, ya que se reducen las emisiones de bióxido
de carbono (CO2).
Las tuberías de cobre que conforman el sistema ofrecen durabilidad (larga vida del
sistema, más de 25 años, comparado con la vida útil mas corta de una caldera),
resistencia, confiabilidad, eficiencia e higiene, ya que dicho metal no se oxida y no
se forman incrustaciones.
ISO 14000
Las ISO 14000 son normas internacionales que se refieren a la gestión ambiental
de las organizaciones. Su objetivo básico consiste en promover la estandarización
de formas de producir y prestar servicios que protejan al medio ambiente,
minimizando los efectos dañinos que pueden causar las actividades
organizacionales. Los estándares que promueven las normas ISO 14000 están
diseñados para proveer un modelo eficaz de Sistemas de Gestión Ambiental (SGA),
facilitar el desarrollo comercial y económico mediante el establecimiento de un
lenguaje común en lo que se refiere al medio ambiente y promover planes de gestión
ambiental estratégicos en la industria y el gobierno. (Calidad, 2010)
Como beneficio para el prototipo en las empresas, en base a la norma ISO 14000,
existe un ahorro en costos, ya que con el ahorro de energía eléctrica o gases no
existen residuos contaminantes porque toda la energía se obtiene del Sol, esto es
un gran ahorro en costos a corto y largo plazo para las empresas que decidan utilizar
el proyecto, además de que no contamina el medio ambiente al no generar
desechos.
Aplicando dicha norma en la empresa que deseé obtener el prototipo de forma
correcta obtendrá mayor competitividad porque cumple con lo requerido, además

101
de que se sabe que está cumpliendo con los puntos de la norma desde que se habla
de sus características, beneficios y aplicaciones.
Para los consumidores se aplica en la conformidad del producto, es decir, el
prototipo, porque se asegura la calidad y fiabilidad, ya que se sabe que los
elementos que conforman el producto son sanos y no son peligrosos en su
manipulación y aplicación.

CONCLUSIONES
Como resultado de la investigación e implementación del sistema de control
realizado, se afirma que se cumplió con el objetivo de control propuesto, ya que a
través de la manipulación del flujo se logró el control de la temperatura de salida
mediante un panel de control remoto HMI.
Un factor influyente en el control del proceso, son perturbaciones que el sistema nos
entrega, un ejemplo de ello es que debido al sobredimensionamiento de la bomba
para el proceso la bomba provoca fuertes vibraciones en la tubería, lo cual genera
un movimiento forzado en el sistema de engranaje del prototipo de válvula.
Debido a que el flujo del fluido de trabajo es bajo, nuestro prototipo de válvula de
control regula el flujo dentro del 20% de apertura/cierre, por lo cual la modulación
del prototipo de válvula no es lineal, por esta razón se entiende que dicha válvula
está sobredimensionada al proceso.
La utilización de nuestro prototipo de colector solar depende de la localización y
clima en el que se encuentre montado. Esto afecta en el rango de temperatura que
se pueda obtener en el proceso, gracias a esto el punto de ajuste está limitado a
ese rango de temperatura.
Después de haber analizado los resultados obtenidos en las pruebas del prototipo
de la válvula y el control aplicado al proceso, se concluye que el funcionamiento del
prototipo de la válvula es óptimo para la realización de diversas investigaciones
futuras, relacionadas con el análisis de diferentes tipos de fluidos de trabajo.
El conjunto de sistema de control aplicado al prototipo de colector solar tiene un
rendimiento similar al de una válvula de control motorizada de línea; otorgando tanto

103
manipulación como mediciones precisas, ofreciendo un menor costo en
comparación con la válvula de línea lo cual hace de esto una implementación
redituable.

104
ÍNDICE DE FIGURAS
Figura 1. 1 Insolación anual en la República Mexicana. ...................................................................... 3
Figura 1. 2 Diagrama esquemático del receptor solar. ....................................................................... 9
Figura 1. 3 Colector solar parabólico. ............................................................................................... 10
Figura 1. 4 Tanque de almacenamiento del aceite sintético orgánico. ............................................ 11
Figura 1. 5 Acción Proporcional en un Controlador. ......................................................................... 13
Figura 1. 6 Acción Integral en un Controlador. ................................................................................. 14
Figura 1. 7 Acción Derivativa en un Controlador. ............................................................................. 15
Figura 1. 8 Acción Proporcional - Integral en un Controlador. ......................................................... 16
Figura 1. 9 Acción de control Proporcional Derivativo de un Controlador. ...................................... 17
Figura 1. 10 Acción Proporcional - Integral - Derivativa en un Controlador. ................................... 18
Figura 1. 11 Acciones PI, P, PD en un Controlador. ........................................................................... 19
Figura 1. 12 Acción PID, PD, P en un Controlador. ............................................................................ 19
Figura 1. 13 Diagrama a bloques de lazo de control cerrado. .......................................................... 22
Figura 1. 14 Termopar tipo J. ............................................................................................................ 27
Figura 1. 15 Servoválvula de linea. ................................................................................................... 28
Figura 2. 1 Diagrama a bloques del sistema ...................................................................................... 33
Figura 2. 2 DTI colector solar manual. ............................................................................................... 34
Figura 2. 3 Lazo de control del proseso. ............................................................................................ 36
Figura 2. 4 DTI colector solar automatizado. .................................................................................... 37
Figura 2. 5 Sensor de flujo tipo turbina. ............................................................................................ 39
Figura 2. 6 Motor monofásico. .......................................................................................................... 41
Figura 2. 7 Tanque de almacenamiento. ........................................................................................... 43
Figura 2. 8 Medidor de flujo - MJ-HZ21wa G1 / 2 '' Rosca de plástico.............................................. 45
Figura 2. 9 Primer diseño de la propuesta de válvula. ...................................................................... 47
Figura 2. 10 Diseño modificado del prototipo de válvula ................................................................. 48
Figura 2. 11 Motoreductor de C.D. ................................................................................................... 49
Figura 2. 12 Potenciómetro de precisión. ......................................................................................... 50
Figura 2. 13 Engranes de acero al alto carbón. ................................................................................. 51
Figura 2. 14 Válvula de compuerta. .................................................................................................. 51
Figura 2. 15 Base de aluminio. .......................................................................................................... 52
Figura 2. 16 Prototipo de válvula de control. .................................................................................... 53
Figura 2. 17 Tarjeta ARDUINO® ......................................................................................................... 55
Figura 2. 18 Diagrama a bloques de la programación (1) ................................................................. 56
Figura 2. 19 Diagrama a bloques de la programación (2) ................................................................. 57
Figura 2. 20 Diagrama a bloques de la programación (3) ................................................................. 58
Figura 2. 21 Diagrama a bloques de la programación (4) ................................................................. 59
Figura 2. 22 Lectura de voltaje del termopar. ................................................................................... 60
Figura 2. 23 Generación del punto de ajuste. ................................................................................... 62
Figura 2. 24 Lectura del punto de ajuste ( retroalimentacion). ........................................................ 63
Figura 2. 25 Lógica de seguridad. ...................................................................................................... 64
105
Figura 2. 26 Sistema de seguridad. ................................................................................................... 65
Figura 2. 27 Interfaz Humano-Maquina. .......................................................................................... 69
Figura 3. 1 Gráfica de respuesta de dos señales analógicas. ............................................................ 74
Figura 3. 2 Ajuste en válvula y potenciómetro. ................................................................................. 77
Figura 3. 3 Prototipo de válvula instalada en proceso. ..................................................................... 80
Figura 4. 1 Servo válvula de línea. ..................................................................................................... 85
Figura 4. 2 Prototipo de válvula construido. ..................................................................................... 87
Figura 4. 3 Termómetro de mercurio. ............................................................................................... 91
Figura 4. 4 Termopar tipo J. .............................................................................................................. 92
Figura 4. 5 Depreciación. ................................................................................................................... 93

106
ÍNDICE DE TABLAS.
Tabla 1. 1 investigación solar en la República Mexicana .................................................................... 5
Tabla 1. 2 Características de calefactores solares. .............................................................................. 8
Tabla 1. 3 tipos de termopares. ........................................................................................................ 26
Tabla 1. 4 Características del termopar tipo J ................................................................................... 26
Tabla 2. 1 Características del fluido de trabajo. ................................................................................ 41
Tabla 2. 2 Especificaciones de la bomba. .......................................................................................... 42
Tabla 2. 3 Características del termopar. ........................................................................................... 44
Tabla 2. 4 Especificaciones del sensor de flujo. ................................................................................ 45
Tabla 2. 5 Especificaciones del motoreductor. ................................................................................. 48
Tabla 2. 6 Especificaciones del potenciómetro. ................................................................................ 49
Tabla 2. 7 Especificaciones del engrane. ........................................................................................... 50
Tabla 2. 8 Especificaciones de válvula. .............................................................................................. 51
Tabla 3. 1 Mediciones de resistencia del potenciómetro esperado. ................................................ 71
Tabla 3. 2 Mediciones de voltaje de los potenciómetros esperados. ............................................... 71
Tabla 3. 3 Mediciones reales de resistencia del potenciómetro. ..................................................... 72
Tabla 3. 4Mediciones reales de voltaje del potenciómetro. ............................................................. 72
Tabla 3. 5 Mediciones del potenciómetro y termopar. .................................................................... 75
Tabla 3. 6 Mediciones esperadas de la válvula. ............................................................................... 76
Tabla 3. 7 Mediciones obtenidas en la válvula.................................................................................. 77
Tabla 3. 8 Mediciones obtenidas de flujo. ........................................................................................ 78
Tabla 4. 1 Precio del producto. ......................................................................................................... 88
Tabla 4. 2 Costos de válvula de línea. ............................................................................................... 88
Tabla 4. 3 Costos de Interfaz Humano Máquina. .............................................................................. 88
Tabla 4. 4 Costos de prototipo de válvula. ........................................................................................ 89
Tabla 4. 5 Diferencia entre medidores de Temperatura. .................................................................. 91
Tabla 4. 6Cuadro comparativo de la depreciación anual. ................................................................ 95
Tabla 4. 7Cuadro comparativo entre Colector solar plano y Caldera. .............................................. 98

107
BIBLIOGRAFÍA
Acedo, J. S. (2006). Instrumentacion y control avanzado de procesos. Madrid: Ediciones Dáz de
Santos S.A.
ANES. (2014). Asocioaciíon Nacional de Energia Solar. Obtenido de www.anes.org
Automática, L. R. (2007). Obtenido de http://www.lra.unileon.es/es/book/export/html/268
Copadata. (2013). Obtenido de Interfas hombre-maquina (HMI):
http://www.copadata.com/no_cache/es/productos/product-features/interfaz-hombre-
maquina-hmi.htm
Córdoba., U. N. (2010). Elementos y equipos eléctricos. Obtenido de
http://www.efn.uncor.edu/departamentos/electro/cat/eye_archivos/apuntes/a_practico/
Cap%206%20Pco.pdf
Cuenca, Á. M. (2012). Automática Industrial y Control. Universidad Politécnica de Valencia.
DISA. (s.f.). Departamento de ingenieria de sistemas y automatica. Obtenido de Universidad del
Pais Vasco:
http://www.disa.bi.ehu.es/spanish/asignaturas/17212/t5_estructuras_avanzadas_introdu
ccion.pdf
Enríquez, F. N. (2007). Obtenido de
http://catarina.udlap.mx/u_dl_a/tales/documentos/lep/nunez_e_f/capitulo1.pdf
es.scribd.com. (s.f.). Obtenido de
https://es.scribd.com/doc/95937589/SERVOVALVULAS#download
Galeón.com. (2009). Obtenido de
http://www.galeon.com/machver/CONTROLPROC_I/1BASICASCONTROL.pdf
Glyn, J. y. (2010). Ingeniería ambiental. Prentice Hall. 9.
Instruments, N. (2012). Obtenido de http://www.ni.com/white-paper/10635/es/
Jalloul, C. (s.f.). Bloginstrumentacion. Obtenido de
http://www.bloginstrumentacion.com/blog/2014/08/26/cmo-funciona-termopar/
Kúo, B. C. (2008). Sistemas de Control Automático. Pearson.
P., J. É. (2002). Obtenido de http://www.geocities.ws/joeldupar/control2/Cap5_control.pdf
Picuino. (2008). Obtenido de https://sites.google.com/site/picuino/feedforward_control
Romero, T. M. (2009). Energia solar termica. En T. M. Romero, Energia temica. Mexico:
EdicionesCEAC.

108
Rufes, P. M. (2009). Eneriaa solar termica, Tecnicas para su aprovechamiento. En P. T. Rufes.
Mexico: MARCOCOMBO.
Sánchez, R. G. (2011). Obtenido de
http://www.biblioteca.upibi.ipn.mx/Archivos/Material%20Didactico/Apuntes%20para%20
la%20asignatura%20de%20instrumentaci%C3%B3n%20y%20control/cap4.pdf
Solé, A. C. (1997). Instrumentación Industrial.Alfaomega.
Soteris, A. K. (2009). Solar energy enginnering, Processes and systems. En A. Soteris. San Diego,
Califirnia.
sustentable., E. r. (2015). Secretaria de energia. Obtenido de
http://www.energia.gob.mx/portal/Default.aspx?id=2669
Tamani, B. E. (2009). Diseño de controlador PID utilizando LabView. En B. E. Tamani. Facultad de
Ingenieria Electrica UNMSM.
Tonda, J. (2009). El oro solar y otras fuentes de energia.
Universidad Nacional de Quilmes. (2013). Obtenido de Ingenieria de Automatizacion y Control,
Introduccion a HMI.:
http://iaci.unq.edu.ar/materias/laboratorio2/HMI%5CIntroduccion%20HMI.pdf
Villalobos, A. (s.f.). www.aie.cl. Obtenido de
http://www.aie.cl/files/file/comites/ca/abc/Estrategias_de_Control.pdf
Villareal, J. R. (2011). Obtenido de ftp://ftp.ni.com/pub/gdc/tut/6655_controladores_2.pdf

APÉNDICE A: ESPECIFICACIONES

110

111

112

113

114

115

116
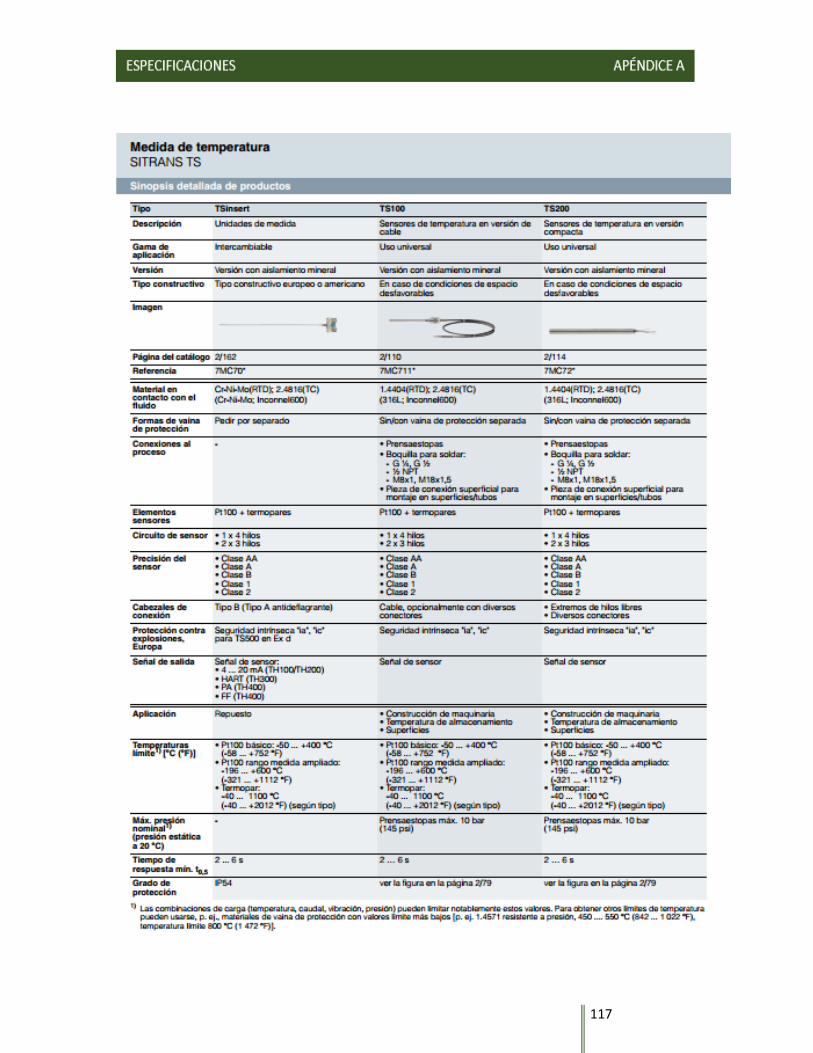
117

118
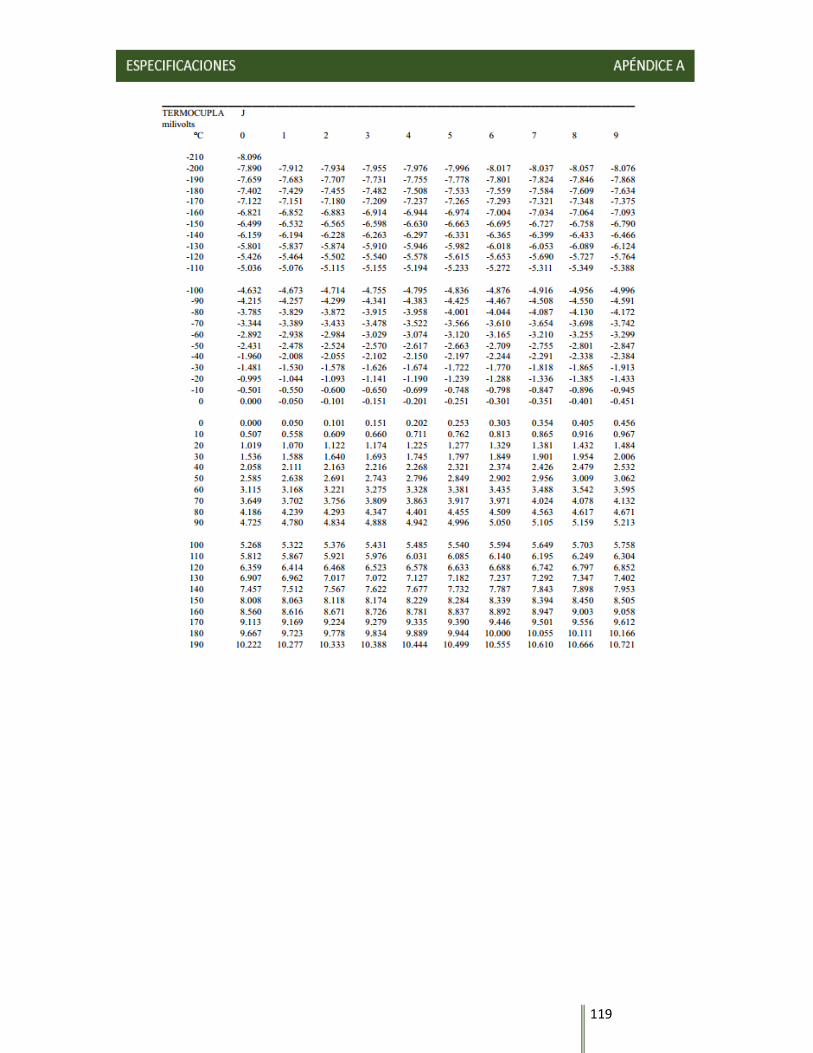
119

120

121

122

123

APÉNDICE B: PLANOS

125

126
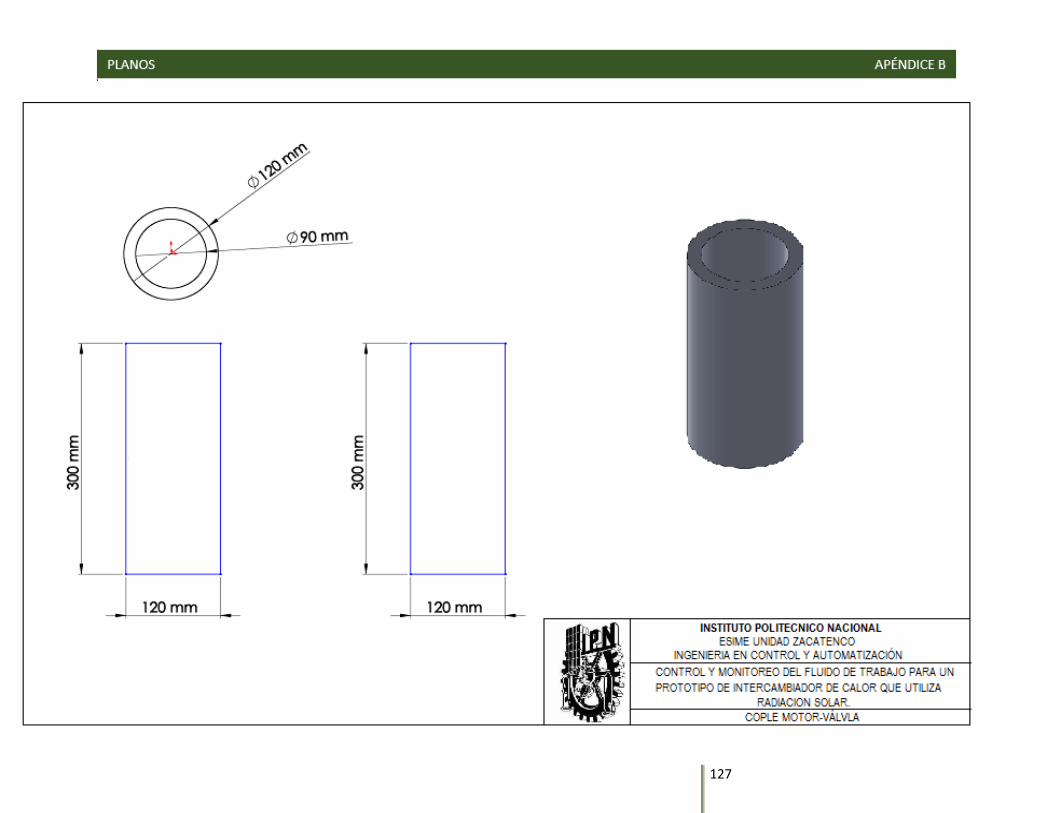
127
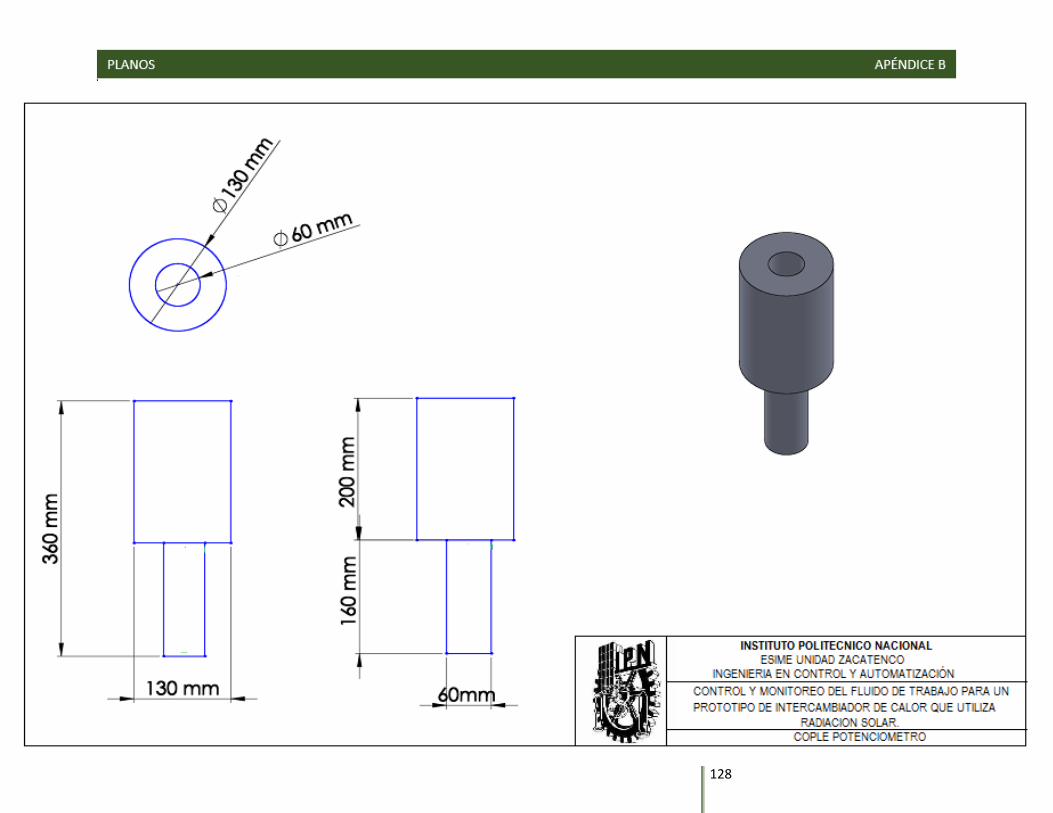
128

129

APÉNDICE C: MAQUILADO

131
DISEÑO.
Para lograr la transmisión de movimiento entre el motor de CD y el potenciómetro
de precisión, se requería de dos engranes en relación uno a uno, los cuales fueron
maquilados en el en el taller de máquinas y herramientas del IPN ESIME Zacatenco.
A continuación se desglosan las ecuaciones utilizadas para el diseño del engrane.
DATOS
d Diámetro primitivo
P Paso circular
Ø Dímetro exterior
N Numero de dientes
M Módulo
DC Distancia entre centros
W Profundidad del diente
E Espesor
Calculo del engrane.
El cálculo del paso circular o diametral es realizado para conocer donde es el
punto de contacto entre los dos engranes. Sobre este diámetro es el cual los
dientes de un engrane entran en contacto con el otro.

132
𝑃 =𝑁
𝑑=
20
5.4= 3.703 Ecuación (1)
𝑀 = 𝑑
𝑁=
5.4
20= 0.27𝑐𝑚 Ecuación (2)
Donde:
N: 20
d: 5.4 cm
Distancia entre centros.
La función de la distancia entre centros es colocar un engrane junto al otro en el
lugar correcto, para que exista el contacto y la transmisión de movimiento, pero a
su vez que no se traben por su cercanía o estén muy separados y no exista el
contacto.
𝐷𝐶 =𝑑
2=
5.4
2= 2.7 𝑐𝑚 Ecuación (3)
MAQUINADO.
Ya entrando el materia y teniendo especificadas las dimensiones requeridas del
engrane se comienza con su fabricación, esta fue en una fresadora No. 5, (por ser
20 el número de dientes). A la cual se le acoplo un cortador de módulo 2 de acero
rápido.

133
El generador de engranes se ajusta a una velocidad de 726 RPM. Obteniendo
este valor a través de la siguiente ecuación.
𝑅𝑃𝑀 = ((𝜙)(𝑁 + 2)) = ((33)(20 + 2)) = 726 𝑅𝑃𝑀 Ecuación (4)
El materia seleccionado para la elaboración de estos engranes es Acero 8620,
acero aleado bajo carbón para poder cementar. Ya que cuenta con una resistencia
a la tracción de 5,364 Mpa. Y alcanza temperaturas altas de trabajo, ya que su
punto de forjado es a los 1,204 °C. La aleación de acero carburado grado 8620 es
resistente y duradera, por lo que se prefiere para fabricar este tipo de piezas. La
carburación consiste en calentar el acero a una temperatura dada y, a continuación,
se expone a un agente que contiene carbono, un proceso que añade una capa
adicional de carbono en la parte exterior del acero, haciéndolo así más fuerte.
Obteniendo asi, los dos engranes con las siguientes dimensiones.
ENGRANE
Material Acero 8620, acero aleado bajo
carbón para poder cementar
Numero de dientes 20 dientes
Diámetro exterior 3.3 cm
Diámetro interior 0.6 cm
Cabeza de diente 0.2 cm
Diámetro primitivo 2.7 cm
Longitud de diente 0.6 cm
Distancia entre centros 3.0 cm




















