
redacted - MIT's DSpace - Massachusetts Institute of Technology
125
Computational Modeling of the Densification of Silica Glass Under Shock Loading by Mohammad Shafaet Islam B.S.E, University of Michigan (2015) Submitted to the Department of Aeronautics and Astronautics in partial fulfillment of the requirements for the degree of Master of Science in Aeronautics and Astronautics at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY June 2018 Massachusetts Institute of Technology 2018. All rights reserved. ASignature redacted A uthore......... ........ Department of Aeronautics and Astronautics Signature redacted May 24, 2018 Certified by... Ran'l Radovitzky Professor of Aeronautics and Astronautics Thesis Supervisor Accepted by ......... MASSACHUSETTS INSTITUTE OF TECHNOLOGY JUN 28 2018 LIBRARIES ARCHIVES Signature redacted Hamsa Balakrishnan Associate Professor, Aeronautics and Astronautics Chair, Graduate Program Committee
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of redacted - MIT's DSpace - Massachusetts Institute of Technology
Computational Modeling of the Densification of
Silica Glass Under Shock Loading
by
Mohammad Shafaet Islam
B.S.E, University of Michigan (2015)
Submitted to the Department of Aeronautics and Astronauticsin partial fulfillment of the requirements for the degree of
Master of Science in Aeronautics and Astronautics
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June 2018
Massachusetts Institute of Technology 2018. All rights reserved.
ASignature redactedA uthore......... ........Department of Aeronautics and Astronautics
Signature redacted May 24, 2018
Certified by...Ran'l Radovitzky
Professor of Aeronautics and AstronauticsThesis Supervisor
Accepted by .........MASSACHUSETTS INSTITUTE
OF TECHNOLOGY
JUN 28 2018
LIBRARIESARCHIVES
Signature redactedHamsa Balakrishnan
Associate Professor, Aeronautics and AstronauticsChair, Graduate Program Committee

2

Computational Modeling of the Densification of Silica Glass
Under Shock Loading
by
Mohammad Shafaet Islam
Submitted to the Department of Aeronautics and Astronauticson May 24, 2018, in partial fulfillment of the
requirements for the degree ofMaster of Science in Aeronautics and Astronautics
Abstract
Under extremely high pressures (greater than 10 GPa), glass undergoes a severe per-manent reduction in volume. The permanent densification of glass serves as a mech-anism for the material to absorb large amounts of energy under pressures potentiallyachievable during ballistic loading. This ability has recently garnered interest in glassas a candidate material for ballistic protection. The development of such glass-basedprotection systems can be aided by simulation tools. However, this requires an accu-rate constitutive model capturing material response under high pressure and shear.In this work, we develop three constitutive models for glass of varying complexitywhich account for its response to loading, including during densification. Our mostcomprehensive model combines an equation of state for glass with a plasticity modelwhose flow rule permits permanent volumetric reduction. The model shows a satis-factory match to experimental pressure-density data for a wide range of pressures,including those within the densification regime. To verify the model, we simulateshock conditions in an idealized piston using finite element simulation, and find thatthe Rankine-Hugoniot jump conditions are satisfied. Lastly, we use the model to aidthe design of high pressure experiments of glass capable of causing densification. Weperform finite element simulation of two experimental geometries. The first geom-etry uses laser induced surface acoustic waves to generate high pressures, while thesecond design uses shock waves that travel through the entire body of the sample.The first design illustrates a competition between densification and fracture. In par-ticular, highly tensile stresses causing fracture in experimental samples mitigate highcompressive stresses necessary for transformation. The second design is a convergingshock configuration which avoids this issue and therefore can be used to evaluatethe mechanical response of glass at high pressures. The computational frameworkpresented here can be used to design better experiments for glass testing as well asmeasure the ballistic protection performance of glass under extreme loads.
Thesis Supervisor: Rail Radovitzky
3

Title: Professor of Aeronautics and Astronautics
4
Acknowledgments
First and foremost, I would like to thank my advisor Ranil Radovitzky for his patience,
support, and guidance over the past three years. I am grateful for this opportunity
to conduct research as a part of the RRgroup, and to be a part of the collaborative
environment he has cultivated within the group.
I would also like to thank the past and present members of the RRgroup who have
helped me through this endeavor. Thank you to the postdoes in the group Aur6lie
Jean, Martin Hautefeuille, Adrian Rosolen, Yang Liu, Khai Pham, Panos Natsiavas,
Ryadh Haferssas, Bianca Giovanardi and Anwar Koshakji for always sharing your
knowledge and helping me out when research (and even life) got tough. I also want
to thank the fellow graduate students in the group including Brian Fagan, Tom Fronk,
Zhiyi Wang, Chris King, Michael Braun, Brad Walcher, and Adam Sliwiak for sharing
the academic experience with me and making it an enjoyable one.
Some of my favorite parts of graduate school involved teaching. For that, I would
like to thank Professors David Darmofal, Qiqi Wang and once again Ranil for giving
me the opportunity to serve as a TA in undergraduate courses in the AeroAstro
Department. I really enjoyed the opportunity to improve my teaching in Unified
Engineering and 16.90, and getting to know the undergraduate community at MIT.
As we do during House Meetings, I also want to give a shout-out to my Sidney-
Pacific (SP) family for providing me with a wonderful community at my home away
from home. Thank you to the Heads of House Julie Shah, Neel Shah, Alberto Ro-
driguez and Nuria Jane for being so supportive and for feeding me every week during
our SPEC+ meetings. Thank you to all of the friends I have made here. I will always
cherish the times I spent getting involved, and helping out with Coffee Hour and
Brunch (usually spent cutting pineapples). I am grateful for this community that has
so positively shaped my graduate school experience.
Last, but not least, a thank you to my actual family for their unconditional love
and support. Thank you to my four younger siblings Sharline, Saqib, Farhan and
Fahim, for making time spent back home so much fun. Thank you to my parents for
5

always being on my side and inspiring me to work hard and achieve my goals. I am
inspired by your work ethic and I hope I can do as much as you. Dad, I know you
are watching from above, so I hope this will make you proud.
6

Contents
1 Introduction
1.1 Background and Motivation . . . . . . . . . . . . . . . . . . . . . . .
1.2 Review of Experimental Characterization of Glass Densification . . .
1.3 Previous Efforts on Constitutive Modeling of Glass under Extreme
L oading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Thesis Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
19
21
23
25
2 Computational Framework for Modeling Glass Densification 27
2.1 Finite Deformation Kinematics and Kinetics . . . . . . . . . . . . . . 27
2.2 Constitutive Models for Glass . . . . . . . . . . . . . . . . . . . . . . 28
2.2.1 Equation of State with Deviatoric Elastic Response . . . . . . 28
2.2.2 Introducing Inelasticity (a first attempt) . . . . . . . . . . . . 39
2.2.3 Inelastic Model for Glass Densification . . . . . . . . . . . . . 42
2.3 Numerical Implementation of Governing Field Equations . . . . . . . 54
2.3.1 Spatial Discretization . . . . . . . . . . . . . . . . . . . . . . . 56
2.3.2 Temporal Discretization . . . . . . . . . . . . . . . . . . . . . 56
2.4 Sum m ary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3 Shock Physics in Glass
3.1 Unidimensional Shocks . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Artificial Viscosity . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Verifying the Rankine-Hugoniot Jump Conditions Under Elastic Con-
d ition s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
59
61
64
7

3.3 Verifying the Plastic Shock Structure Under Inelastic Conditions . . .
3.4 Sum m ary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Exploring Transformations in Glass using Simulations
4.1 Surface Acoustic Wave Experiments . . . . . . . . . . . . . . . . . . .
4.2 Fracture in Surface Wave Experiments . . . . . . . . . . . . . . . . .
4.3 Exploring Converging Shock Waves . . . . . . . . . . . . . . . . . . .
4.4 Sum m ary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Conclusion
5.1 Sum m ary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Model Improvements . . . . . . . . . . . . . . . . . . . . . . . . . . .
A Derivation of Rankine-Hugoniot Jump Conditions
B Variational Formulation of Camclay Theory of Plasticity
B.1 Governing Equations . . . . . . . . . . . . . . . . . . . . . .
B.1.1 Update Algorithm . . . . . . . . . . . . . . . . . . .
B.1.2 Implementation based on logarithmic elastic strains .
B.1.3 Yield Criterion . . . . . . . . . . . . . . . . . . . . .
C Time Integration Procedure for Inelastic Model for Glass
C.1 Time-Integration Procedure . . . . . . . . . . . . . . . . . .
8
69
71
73
73
87
92
97
99
99
101
103
107
. . . . 107
. . . . 109
. . . . 110
. . . . 114
117
117

List of Figures
1-1 Volcanic glass, or obsidian which forms upon the rapid cooling of vol-
canic m agm a. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1-2 A crystalline material (left) containing an orderly structure, and amor-
phous glass (right) containing randomly oriented silicon and oxygen ions. 20
1-3 Equation of State for Glass describing the volumetric behavior of low
density and high density (transformed) silica glass . . . . . . . . . . . 24
2-1 Equation of State (EoS) for glass describing the pressure-density be-
havior of glass in the low density regime (shown in green) and the high
density regime (shown in blue). . . . . . . . . . . . . . . . . . . . . . 29
2-2 Equation of State (EoS) for glass containing low density behavior, high
density behavior, and polynomial fit for phase transition regime. The
phase transition behavior shows a flattening in the pressure density
behavior which is indicative of the occurrence of a phase transformation. 35
2-3 Celerity corresponding to EoS for glass. The celerity is positive since
the EoS is a purely increasing function. There is a dip during the onset
of the phase transformation process in glass. . . . . . . . . . . . . . . 35
2-4 Shock Wave separating shocked and unshocked regions in a material.
There is a jump in the thermodynamic state variables across the shock,
which are related via the Rankine-Hugoniot Jump Conditions . . . . 36
9
2-5 Glass EoS expressed in the shock velocity-particle velocity (U. - UP)
space. The behavior is roughly linear in the low density and high den-
sity regimes. Additionally, there is a kink in the phase transformation
(blue) regime, indicative of material transformation in this range of
particle velocities. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2-6 Unloading Path from an arbitrary density to the corresponding un-
loading density pp, denoted by PUnload in this figure. . . . . . . . . . . 40
2-7 Volumetric Behavior of Model under Cyclic Hydrostatic Loading and
Unloading. The model unloads to various densities based on the ini-
tially applied pressure, illustrating that the model may be used to
achieve various degrees of permanent densification. . . . . . . . . . . 41
2-8 Yield Surface for Camclay Model . . . . . . . . . . . . . . . . . . . . 44
2-9 Volumetric Behavior of inelastic model for glass obtained from hy-
drostatic loading and unloading. The model shows a good match to
experimental data available in the literature from Alexander [11, Sato
[28] and Marsh [201. Furthermore, it exhibits 77% relative densification
upon unloading from high pressures of approximately 80 GPa. .... 48
2-10 Volumetric behavior of inelastic model under cyclic loading. The model
allows for various degrees of permanent densification to be achieved,
based on the applied loading pressure. . . . . . . . . . . . . . . . . . 49
2-11 Relative densification (in %) observed upon unloading from hydrostatic
pressures between 0 and 80 GPa. Our model predicts a fairly linear
pressure-densification behavior, with densification beginning at a pres-
sure of 10 GPa (as observed in experiments) and ending close to 80
G P a. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
2-12 Shear Stress vs. Shear Strain for constitutive test in which various
initial pressures are applied followed by a shear deformation which is
increased up to a value of y = 0.2. The results illustrate that higher
initial pressures result in higher shear stresses at a given shear strain. 51
10

2-13 Variation of effective shear modulus with initial pressure. The shear
modulus increases as the applied hydrostatic pressure increases. . . . 52
2-14 Pressure vs. Volumetric Compression Results for constitutive test in
which various initial shear strains are applied followed by pressure load-
ing to 50 GPa and unloading. The results illustrate no dependence of
the volumetric behavior predicted by the model on initially applied
shear strains. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3-1 Boundary Value Problem (BVP) Setup for idealized piston. A piston
velocity is applied to the bar to initiate a shock wave. . . . . . . . . . 59
3-2 Finite element mesh used to represent bar in idealized piston. The
top figure illustrates the initial coarse mesh, while the bottom figure
illustrates the refined mesh obtained after 3 levels of refinement. . . . 60
3-3 Pressure Profiles along length of bar at time t = 0.1 ms for various
piston velocities. The results show significant amounts of oscillation,
which increase in magnitude with increasing piston velocity. . . . . . 61
3-4 Shock Waves along length of bar at time t = 0.1 ms for various pis-
ton velocities. The oscillations previously present have been mitigated
through the use of artificial viscosity. . . . . . . . . . . . . . . . . . . 64
3-5 Shock in Piston separating shocked and unshocked regions. The shock
has traveled halfway through the bar (left) causing a jump in the pres-
sure between the two regions (right). . . . . . . . . . . . . . . . . . . 65
3-6 Comparison of theoretically expected shock velocity, jacobian, and
pressure (shown as blue lines) to those found in the simulations (shown
as red dots). Theoretically obtained jacobian corresponds to the con-
servation of mass, while theoretically obtained pressure corresponds to
conservation of momentum. A good match is found in all three results,
illustrating that the jump conditions are satisfied. . . . . . . . . . . . 68
11
3-7 Shock Profiles Obtained from applying a piston velocity of U, = 2000 m/s
using the inelastic model for glass transformation under plastic and
elastic (the preconsolidation pressure pc is set to a very high value
to prevent yielding) conditions. We observe that the elastic shock is
much sharper than the plastic shock, and also travels much farther.
The inelastic shock lags behind. These characteristics agree with the
expectations of shock theory. . . . . . . . . . . . . . . . . . . . . . . . 70
4-1 Experimental setup and glass samples for surface acoustic wave exper-
iments. The experimental setup contained a conical prism and lens
used to focus a laser pulse on engraved gold rings deposited on the
samples, generating surface waves. Convergence of the surface waves
leads to high pressures in the samples. A reference mirror and high
speed camera allowed for imaging of the surface waves over time. . . . 74
4-2 Focusing and diverging surface acoustic waves (SAWs) resulting from
the ablation of the gold coating in glass samples. The red dashed circle
shows the region where the gold ring was ablated. The white lines are
fringe patterns which can be used to infer the surface displacement of
the sample at a given time. High pressures are achieved in the sample
when the focusing SAW converges to the center. . . . . . . . . . . . . 75
4-3 Interferometric images of propagating surface acoustic waves shown
at various times. The focusing shock wave converges at t = 31 ns,
leading to large pressures. The wave diverges thereafter, causing tensile
stresses in the sample leading to brittle fracture. Fringe Patterns in
the images can be used to infer surface displacements at the time of
im aging. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4-4 3D schematic of Glass Sample and surface shock wave setup. The laser
excitation ring is applied at the location of the gold ring on the sample,
generating focusing and diverging surface shock waves. . . . . . . . . 77
12
4-5 Profile of glass sample modeled using axisymmetric finite elements.
The laser excitation pulse is modeled as a Gaussian force distribution. 78
4-6 Comparison of numerical and experimental out-of-plane displacements
at various times during surface wave convergence, for a laser energy of
0.15 m J. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4-7 Comparison of numerical and experimental out-of-plane displacements
at various times during surface wave convergence, for a laser energy of
0.25 m J. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4-8 Comparison of numerical and experimental out-of-plane displacements
at various times during surface wave convergence, for a laser energy of
0.5 m J. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4-9 Comparison of numerical and experimental out-of-plane displacements
at various times during surface wave convergence, for a laser energy of
0.75 n J . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4-10 Correlation obtained between applied laser energy and Gaussian am-
plitude. There is a roughly linear trend between the amplitude and
laser energy. However, this tapers off between 0.75 mJ and 1 mJ. . . 82
4-11 Snapshots of the pressure contours in the glass sample at various times
for 0.15 mJ case (A = 15 GPa). A P-wave and surface acoustic wave
are generated by the Gaussian force distribution. These waves travel
at different speeds and converge causing large tensile and compressive
pressures at the center. ... . . . . . . . . . . . . . . . . . . . . . . . 83
4-12 P-wave and Rayleigh wave speeds computed at each nanosecond in
the simulation. The theoretical speeds are also indicated as dashed
red lines. We observe that the simulations show reasonable match to
the theoretical value. . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
13

4-13 Pressure Profile on surface of glass sample during convergence of Rayleigh
wave, shown for simulations corresponding to 0.25 mJ and 1.00 mJ
experiments. The peak pressure achieved are 6 GPa and 12 GPa re-
spectively, showing that the 1.00 mJ experiments have the potential to
cause transformation. Fracture effects will likely mitigate transformation. 86
4-14 Crater in glass sample observed in the 1.00 mJ experiments. The
dimensions are a diameter of 15-20 pm and depth of 5 1um. The crater
likely occurs due to high tensile stresses occurring upon convergence of
the Rayleigh waves. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4-15 Hoop and Radial stress profiles during Rayleigh wave convergence and
divergence. High tensile stresses are observed at the center of the glass
sample before the high compressive pressures necessary for transfor-
mation. Thus, we suspect fracture will occur and prevent pressures
necessary for transformation from being achieved. . . . . . . . . . . . 89
4-16 Fracture patterns in glass substrate caused by the convergence of a
surface acoustic wave generated by laser energy of = 0.25 mJ . . . . . 90
4-17 Fracture patterns in glass substrate caused by the convergence of a
surface acoustic wave generated by laser energy of = 1.00 mJ . . . . . 90
4-18 Pressure Profile on surface of glass sample during convergence of Rayleigh
wave, from 3D simulations with fracture and axisymmetric simulations
without fracture. The predicted peak pressure is not high enough to
cause transformation when fracture is accounted for. . . . . . . . . . 91
4-19 An axisymmetric view of the experimental setup for generating shock
waves through the bulk of the glass sample. A laser (depicted by
arrows in the figure) is applied to a polymer host, generating a shock
wave in the material. The wave propagates to the glass and eventually
converges, resulting in very high pressures at the center. . . . . . . . 92
4-20 Axisymmetric and 3D Setup for BVP representing converging shock
wave experim ent. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
14
4-21 Axisymmetric and 3D Views of Converging Shock Waves in Glass at
various times. The shock wave travels through the material and con-
verges at the center, resulting in the highest compressive pressures (in
red) experienced by the sample throughout the simulation (at approxi-
mately at 8 ns). The wave then diverges outwards at t = 10 ns causing
tensile stresses (in blue) in the sample. . . . . . . . . . . . . . . . . . 95
4-22 Pressure Profiles in Glass sample when pressure wave converges to the
center, for various applied piston velocities . . . . . . . . . . . . . . . 96
4-23 Density Profile of Glass sample, resulting from high pressures induced
in sample by applied piston velocity . . . . . . . . . . . . . . . . . . . 96
A-I Shock Wave separating shocked and unshocked regions. There is a
jump in the thermodynamic state variables across the shock, which
are related via the Rankine-Hugoniot Jump Conditions. . . . . . . . . 103
B-i Yield Surface of the Camclay Model . . . . . . . . . . . . . . . . . . . 115
15

16
List of Tables
2.1 Parameter values selected for low and high density EoS for Glass, giving
a faithful reconstruction of the original EoS curves . . . . . . . . . . . 31
2.2 Coefficient values for fifth order polynomial representing volumetric
behavior of glass within phase transition regime . . . . . . . . . . . . 33
2.3 Coefficient values for Co and Si in the Low Density and High Density
Regimes Obtained by a Linear Fit to U, - Up curves. . . . . . . . . . 38
2.4 Model parameters and values for clay (from [10]) and those calibrated
for glass. Parameters for Glass were obtained by tuning volumetric
behavior of the model to match available experimental data, and by
ensuring plasticity begins at 10 GPa corresponding to the onset of
permanent densification. . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.5 Permanent Densification as a result of unloading from pressures of
20, 40, 60, 80, 100 GPa using inelastic model for glass. . . . . . . . . . 49
3.1 Tuned Artificial Viscosity Parameters chosen for each piston velocity
case to mitigate oscillations present in shock waves while minimizing
the amount of smearing. Higher piston velocities use slightly higher
values of CL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . .63
3.2 Table of Results indicating the simulation results for shock velocity
Us, jacobian J, pressure P and the corresponding theoretical values
for various piston velocities U,. There is a good match between simu-
lation and theoretical results for all parameters and piston velocities,
indicating that the jump conditions are satisfied. . . . . . . . . . . . . 67
17

4.1 Material properties used for simulation of fracture . . . . . . . . . . . 90
18

Chapter 1
Introduction
1.1 Background and Motivation
Glass is a fascinating material that is nearly ubiquitous in everyday life, and also
readily available in nature. In the natural world, one may encounter glass in settings
such as volcanoes, where molten magma that cools rapidly and lacks time to crystallize
forms a glass known as obsidian (shown in Figure 1-1). Glass may be also be found
in sites of meteorite impact, where it forms under shock conditions typically present
during planetary impact.
Figure 1-1: Volcanic glass, or obsidian which forms upon the rapid cooling of volcanic
magma.
19

In more everyday settings, glass is found in household and commercial products
such as windows, cookware and chemical beakers. While these products comprise
some of the traditional uses of glass, the material has also recently attracted significant
attention for applications involving ballistic protection. Specific applications include
military applications such as windows for ground and aerial combat vehicles 111].
Such applications may appear to be strange for a material as brittle as glass, which
risks breaking very easily. However, the amorphous microstructure of glass, coupled
with its unique ability to undergo a severe amount of permanent compaction, allows
it to absorb large amounts of energy when subjected to extremely high pressures
present in ballistic applications.
The microstructure of glass is composed of silicon and oxygen ions bonded in a
4-coordinated structure [1], in which each silicon atom is covalently bonded to four
oxygen atoms. The bonds between the ions are randomly oriented giving rise to
an amorphous microstructure (as shown in Figure 1-2). Furthermore, the packing
a ba
Figure 1-2: A crystalline material (left) containing an orderly structure, and amor-
phous glass (right) containing randomly oriented silicon and oxygen ions.
density of this microstructure is approximately 55% indicating that much of the mi-
crostructure is unoccupied space. When pressures of 10 GPa or higher are applied to
glass, however, the silicon and oxygen ions break apart and reorient themselves [37j.
This results in a 6-coordinated microstructure in which each silicon ion is bonded to
six oxygen ions [1, 28]. The resulting microstructure is much more dense than the ini-
tial microstructure and has a larger packing density. Additionally, this new structure
exists even after the high pressures are removed. The ability of glass to undergo this
20

transformation under high pressures is known as permanent densification, and pro-
vides glass with a way to absorb energy under extreme loading via severe compression.
This energy absorption mechanism in glass may potentially be exploited for ballistic
protection applications in which glass is subjected to extremely high pressures.
Understanding the behavior of glass and the potential of permanent densification
for ballistic applications requires extensive experimental testing and computational
analysis. In the following sections, we summarize previous experimental observations
of the densification of glass under high pressures, as well as computational efforts to
model this densification.
1.2 Review of Experimental Characterization of Glass
Densification
The densification of silica glass and its potential to transform under high pressures has
been the subject of extensive study. Initial evidence of the permanent densification of
silica glass was first observed by Bridgman and Simon [5] in the 1950s, who performed
compression tests on thin disks of silica glass and measured an 8% increase in density
after loading to 16 GPa. They also report that this densification process begins at a
threshold pressure of 10 GPa. Similar compression experiments were performed by
Christiansen [6], who observed densification at much lower pressures of 5 GPa, and
only 4% densification upon loading to 10 GPa. Roy and Cohen [8] observed initial
densification at even lower pressures around 2 GPa upon performing compression tests
on powdered samples of silica glass, and observed a larger 11% densification at 10
GPa. Experimental studies and analysis by Mackenzie [19] imply that such disparities
in densification measurements are due to differences in the amount of shear present
in each experimental setup, as high shear was also found to facilitate densification.
This provides an explanation for Roy and Cohen's observations of densification at
low pressures, as powdered samples generate large amounts of internal shear forces
upon compression, likely aiding the densification process of glass without the need
21

for a large pressure contribution. High temperatures were also found to facilitate
densification [19, 13].
Further testing at similar pressures was conducted by Susman and Zha in the
1990s. Susman [32] conducted compression tests on rods of silica glass to pressures
of 16 GPa at room temperature, and found a 20% increase in density at 16 GPa.
Zha performed compression tests using a diamond anvil cell (DAC) to apply large
hydrostatic pressures to glass, and performed measurements on the sound velocities
and refractive index of shocked samples to obtain densification values. They found a
19.6% increase in density upon loading to 16 GPa [38], in agreement with the results
reported by Susman. Polian and Grimsditch [26] also performed experiments utilizing
a DAC to even larger pressures, and found a 40% increase in density at 30 GPa, much
higher than previously observed.
In more recent years, shock experiments have been performed to higher pressures
of 50 GPa. Alexander [1] performed plate impact experiments using gas guns to
shock glass to high pressures. Although densification amounts were not detailed in
this study, he obtained pressure-density data describing the volumetric behavior of
glass up to 40 GPa. Sato [28] also performed testing at high pressures, conducting
compression tests on silica glass to 50 GPa and using x-ray diffraction for density mea-
surements. Sato's experiments give further pressure-density data for the volumetric
behavior of glass, and it is hypothesized from their results that silica glass transforms
to a high density amorphous polymorph with a density of p = 3.88 g/cm3 , suggesting
approximately 77% densification [4] in glass. Some researchers believe that this high
density material is actually stishovite, a crystalline polymorph of amorphous silica
glass [21]. However, there is still debate on whether the resulting material is truly
crystalline or another amorphous polymorph of glass [38].
Extensive testing has been conducted on glass to explore its densification behav-
ior, as described above. However, there is wide variability in the results obtained
by different researchers. Furthermore, most studies focus on the response of glass to
hydrostatic loading. Clifton et al. performed some experimental studies on the shear
response of glass [7, 31]. They conduct angled flyer plate experiments on glass, and ob-
22

served a loss of shear strength under large pressure-shear deformation. They attribute
this behavior to the rearrangement of bonds in the silicon and oxygen microstructure
[31], similar to that which occurs during permanent densification. However, the effect
of shear on permanent densification is still not completely established. Given these
limitations, it is clear that more effort should be devoted to the high pressure and
shear response of glass.
1.3 Previous Efforts on Constitutive Modeling of Glass
under Extreme Loading
There have been a number of previous efforts towards the computational and consti-
tutive modeling of glass. These efforts have attempted to capture the densification
behavior observed in the previously described experiments. The first effort on compu-
tational modeling of glass was carried out by Woodcock et al. [12, 38], who observed
densification in Molecular Dynamics (MD) simulations of silica glass [36]. Such MD
studies have been useful in the development of constitutive models for glass. Several
of these proposed constitutive models are reviewed here.
One constitutive model for glass was proposed by Lambropoulous [17] in 1991.
He used a plasticity model to describe the permanent densification of glass. In this
model, a yield criterion based on both pressure and deviatoric loading is developed,
as well as a volumetric flow rule that continues to increase the amount of perma-
nent densification in glass. While this model captures densification and the effect of
shear, it is based on a small-strain formulation that is not representative of the large
deformations of glass under the high pressures required for permanent densification.
Keryvin et al. [15] present a constitutive model based on large deformation kinemat-
ics. However, the model only applies under hydrostatic loading to a pressure of 25
GPa, and is unable to describe glass densification under higher pressures achieved in
recent experiments. The model also does not apply under combined pressure-shear
loading. The JH2 material model developed by Johnson and Holmquist [14] is a
23

failure model for ceramics that has been adapted for modeling glass. This model
utilizes an equation of state to describe the pressure-density behavior of glass, as well
as a strength and damage model for failure modeling. While their model accounts
for some permanent densification, the volumetric behavior present in the model is
not validated with experimental data, and may not be representative of the volu-
metric behavior of glass during the transformation process. Schill [29J performs MD
simulations of silica glass and observes densification which eventually saturates upon
sufficiently high pressure-shear deformation. Their MD results inspire a critical state
plasticity model for glass densification with a combined pressure-shear yield condi-
tion. Their model also incorporates a shear modulus based on elastic compression,
coupling pressure and shear response.
Becker developed an equation of state for glass [3] based on experimental data.
This equation of state describes the volumetric behavior of glass before and after
its transformation. Figure 1-3 shows the pressure-density relation for glass, where
the green solid curve represents the behavior of normal silica glass, and the blue
solid curve represents the behavior of the transformed silica polymorph. While the
75 40-5 Hugoniot data 400
65 - P-Lo density 350- P-H i density 0.
55 K-Lo density 300(C 45 . - -K-Hi density 250 U
35 2000
$ 25 - 150
CL 15 100
5 50 0
-5 2.0 3.0 4.0 5.0 0
Density (g/cm 3)
Figure 1-3: Equation of State for Glass describing the volumetric behavior of low
density and high density (transformed) silica glass
pressure-density relation, or volumetric behavior, of glass is known in the low density
and high density regimes, no description is provided in the intermediate densification
24

regime.
The references above show that there has been some effort to formulate a con-
stitutive model for glass. We seek to develop a constitutive model for glass which
captures its behavior under all pressures, and shows agreement with pressure-density
data available from experiments in the literature. Such a constitutive model should
also capture the densification of glass under high pressures.
1.4 Thesis Contributions
In summary, the development of ballistic protection systems based on glass requires
more high pressure studies and improved constitutive models. Our work focuses
on the development of numerical models for glass. Such models are used to design
potential high pressure experiments on glass.
In this work, we develop several plausible constitutive models for glass captur-
ing its deformation behavior under densification. Each model is tested under shock
conditions for verification purposes using finite element simulations. Afterwards, the
models are used to perform simulations of two experimental setups in order to study
their potential to cause transformation in glass.
This thesis is structured as follows. In Chapter 2, we present our proposed con-
stitutive models for glass deformation and densification developed in this study. In
Chapter 3, we present shock loading tests conducted using the constitutive models to
see if they give results in agreement with shock theory. In Chapter 4, we present sim-
ulations conducted to explore the capabilities of two experimental configurations to
generate high pressures in glass. Our goal here is to motivate the design of a new ex-
perimental geometry capable of generating very high pressures in glass. We conclude
with Chapter 5, discussing possible improvements to our constitutive models.
25

26

Chapter 2
Computational Framework for
Modeling Glass Densification
The computational framework for our work is provided in this chapter. Here we
describe the finite deformation kinematics, the constitutive models developed for glass
densification, and the the balance of linear momentum which we solve using the finite
element method. Emphasis is placed on the specific constitutive models we develop
for glass densification, which are the novel aspects of this work.
2.1 Finite Deformation Kinematics and Kinetics
Here we summarize the basics of finite deformation kinematics and kinetics which can
be found in any solid mechanics text. Consider a body initially occupying a reference
configuration BO. The motion of the body is described by the deformation mapping
X = a(X, t), X E BO (2.1)
Here, the coordinates X are the material coordinates of a particle in the body while x
are the spatial coordinates at time t. The local deformation of infinitesimal material
27

neighborhoods is described by the deformation gradient
F = dx = dp(Xt) (2.2)dX dX
The determinant of the deformation gradient tensor, defined by J, relates the volume
of a body in the reference configuration V to its volume in the current configuration
V
J = det (F) = - (2.3)VO
Stresses resulting from deformation may be expressed in the reference configuration
by the first Piola-Kirchoff stress tensor P as follows
P =JFT (2.4)
where a is the Cauchy stress tensor.
2.2 Constitutive Models for Glass
In this section we present the constitutive models developed in this thesis to model
the response of glass under high pressures. The three models are listed below, and
are ordered in level of sophistication:
" Model 1: Equation of State (EoS) with Neohookean Deviatoric Potential
" Model 2: Model 1 with inelastic effects (our first attempt to incorporate in-
elasticity)
" Model 3: Inelastic Model for Glass
A description of each constitutive model is outlined in the following subsections.
2.2.1 Equation of State with Deviatoric Elastic Response
The first constitutive model developed in this study was an equation of state (EoS)
for glass. An EoS is a constitutive equation relating the pressure and density of a ma-
28

terial, This EoS was coupled with a strain energy density function of the Neohookean
type to describe the deviatoric response of glass. This is a fairly generic elastic energy
typically used to describe rubber. However, the elastic constants in the model may be
tuned to capture the response of glass under shear. For volumetric loading, we adopt
an EoS developed by Becker [3, 111. The EoS was developed and validated through
comparison with experimental data available on glass. For low pressures, a volumet-
ric response was constructed which would agree with direct density measurements of
glass at pressures up to 10 GPa. For higher pressures at which densification occurs,
obtaining direct density measurements in experiments is challenging [111. Instead,
shock and particle velocity data (referred to as Hugoniot data in the shock literature)
from plate impact experiments on glass were converted to pressure-density data using
the Rankine-Hugoniot jump conditions (given in Equations 2.17-2.19). The pressure-
density data inferred from these shock experiments were used to develop the response
of glass under high pressures. The resulting equation of state is plotted in Figure 2-1.
75 __4__
7 Hugoniot data 40065 - P-Lo density 350 g
- P-Hi density 0.55 K-Lo density i 300 e
( 45 K-Hi density I 250 "M
S35 - 200 3
$ 25 150
0.15 100=
5 50
-2.0 3.0 4.0 5.0 0
Density (g/cm3)
Figure 2-1: Equation of State (EoS) for glass describing the pressure-density behavior
of glass in the low density regime (shown in green) and the high density regime (shown
in blue).
Figure 2-1 depicts the pressure-density behavior of silica glass in the low density
regime (shown in green) as well as its behavior in the high density regime (shown in
blue). The variation of the bulk modulus of glass with increasing density in each of
these regimes is also shown using dashed lines. Ultimately, the figure illustrates that
29

the volumetric behavior of glass has a complicated nonlinear response.
Two separate equations were developed to describe the nonlinear volumetric re-
sponse of glass in the low density and high density regimes. The equation of state for
glass in the low density regime is given by the following equation
Ka a _'"Ka [( P0 2kP - 1 - 1-tanh lnn - +FE (2.5)
ka Poa k' POa Po
Equation 2.5 contains a number of parameters. The parameter Ka represents the bulk
modulus of the initial silica glass, k' is its derivative with respect to pressure, and
POa is a reference density. Additionally, F is the Mie-Gruneisen parameter (a quantity
from statistical mechanics describing volume changes due to atomic vibrations [22])
and E is the internal energy. Furthermore, p and po refer to the current and initial
density of the glass material, respectively. Lastly, the factor x is a parameter which
captures the unusual decrease in bulk modulus which occurs in silica glass at low
pressures [3], a phenomenon known as pressure softening [38]. This softening can be
observed in Figure 2-1 by the slight dip in bulk modulus (represented by the green
dashed line) which occurs at low densities.
The equation of state in the high density regime (representing the behavior of the
transformed glass) is given by
P K= b 1 +FE (2.6)
in which the parameters Kb, k', F, and E have the same physical interpretations
described earlier for the low density equation of state (where the subscript b is now
used to represent the high density glass). The reference density Pob was given to be
3900 kg/m 3 [4].
While the equation of state provides a description of the volumetric behavior of
glass prior to and after the densification process, no description is provided for its
behavior during the densification process. Our goal was to introduce a description for
the volumetric response during densification, and effectively connect the low density
30

and high density regimes. This would provide a full constitutive description of the
behavior of glass under high pressures.
To achieve this goal, we began by reconstructing the equation of state for glass in
the low density and high density regimes. The parameters in Equations 2.5 and 2.6
(aside from po = 2.2 g/cm 3 and Pob = 3.9 g/cm 3 ) were not available, so we performed
a parameter fit to determine appropriate values which could faithfully reconstruct the
low and high density equation of state. The program xyscan was used to store data
points from the equation of state curve in Figure 2-1. The stored data points were
then plotted alongside the equation of state given by Equations 2.5 and 2.6, where
arbitrary parameter values were used. These parameter values were tuned so that
the resulting equation of state followed the trend of the data points. In other words,
a set of parameters was found to accurately reconstruct the original equation of state
curves in Figure 2-1. For simplicity, we set the internal energy E to zero.
The following set of parameters given in Table 2.1 was found to give a good
reconstruction of the low and high density equations of state.
Parameter Ka k POa X K kbValue 31 GPa 2.0 2150 kg/m3 0.5 60 GPa 7.0
Table 2.1: Parameter values selected for low and high density EoS for Glass, givinga faithful reconstruction of the original EoS curves
To describe the volumetric behavior of glass during the transformation process,
we assumed a polynomial representation for the equation of state in this regime. We
required the polynomial to be continuous and continuously differentiable at the points
where it connected to the low density and high density curves. This provided four
conditions on the polynomial. Additionally, an inflection point was specified at the
center of the phase transition regime, with a specified slope. This provided two more
conditions on the polynomial, which was now required to satisfy six conditions in
total. A fifth order polynomial representation was assumed in order to satisfy the six
conditions. This representation is shown in Equation 2.7, where the constants co to
31

c5 are unknown.
Ptransition = Co + Cip + C2P2 + C3 P3 + C4p4 + C5P5 (2.7)
Introducing the parameters Ponset, PFinal, and PInflection (representing the density cor-
responding to the initiation of glass densification, the end of transformation, and the
inflection respectively) as well as mlnflection (the slope at the inflection point) one may
write the six conditions as follows:
Ptransition(Ponset) = Plow(Ponset) (2.8)
Ptransition(Ponset) = Piow(Ponset) (2.9)
Ptransition(PFinal) = Phigh(PFinal) (2.10)
Ptransition(PFinal) P hgh(PFinal) (-1
Ptransition (PInflection) = mInflection (2.12)
Ptransition(Plnflection) = 0 (2.13)
In Equations 2.8 - 2.13, the prime denotes a derivative with respect to density, and
Plow and Phigh represent the low density and high density equations, respectively. If
we assume the form of Ptransition given by Equation 2.7, and denote plow(Ponset) and
Phigh(PFinal) simply as POnset and PFinal respectively, Equations 2.8-2.13 may be written
as the following linear system
1 Ponset Ponset nset POnset POnset CO Ponset
12 3 4 5 1PiaPFinal PFinal PFinal PFinal PFinal C1 PFinal
0 1 2 POnset 3 pOnset 4,pnset 5pdJnset C 2 POnset
0 1 2 PFinal 3 PFinal Final F5 pFinal C3 PFinal
0 1 2 Plnflection 3P nfiection 4PInfection 5PInflection C 4 mlnflection
0 0 2 6 plnflection 12P nflection 20pInfection c5 0
Solving the system for the constants co to c5 required specifying the parameters Ponset,
PFinal, PInflection and mlInection. The parameter Ponset was chosen so that POnset would
32

be approximately 10 GPa, as it has been observed experimentally that permanent
densification begins at this pressure [38]. Additionally PFinal was chosen so that PFinal
would be a sufficiently large pressure where transformation is known to end. Lastly,
Plnflection and m1 Inflection were chosen so that the material does not experience any
softening in the transformation regime.
Solving the above matrix system for the coefficients (co to c5 ) of the phase transi-
tion polynomial, with the values of POset = 2.8 g/cm 3 , PFinal = 5 g/cm 3 , PInflection =
3.9 g/cm 3 and MInflection Slope = 5 resulted in the coefficient values given in Table 2.2.
All densities were provided in units of grams per cubic centimeter (g/cm 3 ) to avoid
Polynomial Constant Value
CO -2969.8 GPac1 4029.0 m 2 /s2 x10 9
C2 -2182.6 m5 / (kg S2) x109
C3 592.0130 m8 /(kg 2 s2) x10 9
C4 -80.29 m1 /(kg 3 S2) x109
c5 4.3549 m /(kg4 s2) xlo9
Table 2.2: Coefficient values for fifth order polynomial representing volumetric be-havior of glass within phase transition regime
ill-conditioning of the system which contains large powers of density. Additionally,
Equation 2.7 gives pressure in units of GPa, so one should multiply the value obtained
from this equation by 109 to obtain the pressure in Pa.
The complete equation of state modeling the behavior of glass in the low density,
phase transition, and high density regimes is then
-- ] [ - tanh (Xn ()
P= cO + cIp + c 2p2 + c3p3 + c4P4 + c5p5
k'-1 +lE
if P < Ponset
if Ponset < P < PFinal
if P > PFinal
(2.14)
with the values of each constant summarized in Tables 2.1 and 2.2. The celerity, or
33

wave speed of the material, can be calculated based on the EoS as follows
c = (2.15)
Using Equation 2.15, the celerity in each of the three regimes is given by
k' -1 P)k'lKa ( )a -1- + 2(- -- " - 1 sech2 X In [I - tanh X In (L)
POa POa p k' POa PO PO
C =</c 1 2c2 p + 3c3 p2 + 4c4 p3 + 5c p4
Kb()k-1
(2.16)
A plot of the glass EoS for all three regimes is given in Figure 2-2, with the corre-
sponding celerity plotted in Figure 2-3. Note that since the EoS is a strictly increasing
function, the celerity (found from the EoS by Equation 2.15) is positive for all densi-
ties. We observe that the transformation occurs at a pressure of POnset = 10.224 GPa,
which is close to the 10 GPa value specified in the literature. From Figure 2-2, we
observe a decrease in the slope of the EoS within the phase transition (blue) regime
which is indicative of the phase transformation occurring in glass [2]. This flattening
of the EoS is also reflected in Figure 2-3 which shows a corresponding decrease in
celerity during the beginning of phase transformation. Ultimately, our EoS for glass
shows the expected characteristics in the presence of a phase transformation.
Equations of state may also be described in an alternative parameter space. For
example, the shock velocity-particle velocity (U, - Up) space is also generally used to
describe the behavior of a material under shock loading. This particular description
is often used in shock experiments such as plate impact tests. This is because the par-
ticle velocity (or the projectile velocity) is known, and the velocity of the shock wave
due to impact may also be measured 2-1. To convert an EoS from the pressure-density
description to the shock velocity-particle velocity description, the Rankine-Hugoniot
jump conditions must be applied. The three Rankine-Hugoniot jump conditions rep-
34

90
s0
70
~60s0
S40
14
V.30
20 -
10
Glass EOS
2000 2500 3000 3500 4000 4500 5000 5500
Figure 2-2: Equation of State (EoS) for glass containing low density behavior, highdensity behavior, and polynomial fit for phase transition regime. The phase transition
behavior shows a flattening in the pressure density behavior which is indicative of the
occurrence of a phase transformation.
Ti
12000-
11000
10000
9000
8000
7000
6000
5000
4000
3000
2000-2000
Celerity vs Density
-Low Density- Phase Transition- High Density
2500 3000 3500 4000 4500
DensLtyd) (kg/Td5000 5500
Figure 2-3: Celerity corresponding to EoS for glass. The celerity is positive since the
EoS is a purely increasing function. There is a dip during the onset of the phasetransformation process in glass.
35
___ -j
- Low DensityPhase TransitionHigh Density
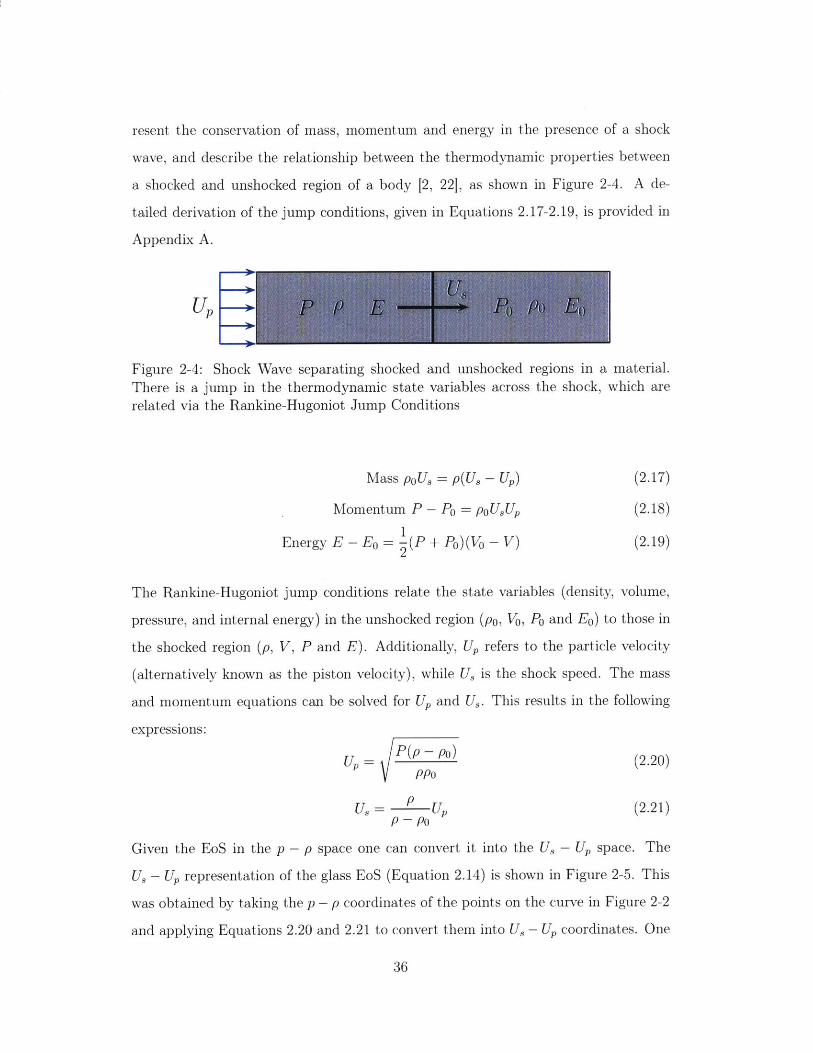
resent the conservation of mass, momentum and energy in the presence of a shock
wave, and describe the relationship between the thermodynamic properties between
a shocked and unshocked region of a body [2, 22], as shown in Figure 2-4. A de-
tailed derivation of the jump conditions, given in Equations 2.17-2.19, is provided in
Appendix A.
UP P P E P Po E
Figure 2-4: Shock Wave separating shocked and unshocked regions in a material.
There is a jump in the thermodynamic state variables across the shock, which are
related via the Rankine-Hugoniot Jump Conditions
Mass poU, = p(U, - Up) (2.17)
Momentum P - Po = poUUp (2.18)
1Energy E - E= -(P + Po)(Vo - V) (2.19)
2
The Rankine-Hugoniot jump conditions relate the state variables (density, volume,
pressure, and internal energy) in the unshocked region (po, V, P and Eo) to those in
the shocked region (p, V, P and E). Additionally, Up refers to the particle velocity
(alternatively known as the piston velocity), while U, is the shock speed. The mass
and momentum equations can be solved for Up and U,. This results in the following
expressions:
UP = P0 (2.20)
PPo
us = Up (2.21)P - po
Given the EoS in the p - p space one can convert it into the U, - Up space. The
U, - Up representation of the glass EoS (Equation 2.14) is shown in Figure 2-5. This
was obtained by taking the p - p coordinates of the points on the curve in Figure 2-2
and applying Equations 2.20 and 2.21 to convert them into U, - Up coordinates. One
36
-I

could also perform this transformation analytically by taking the EoS in Equation
2.14 and substituting it for P in Equations 2.20 to 2.21, but this was not done here
due to the complexity of the EoS.
8500-Low Density
Phase TransitionHigh Density
7500
E7000
6500U06000-
>5500-0 5000
4500
4000
35000 1000 2000 3000 4000 5000
Particle Velocity [m/si
Figure 2-5: Glass EoS expressed in the shock velocity-particle velocity (US - UP)space. The behavior is roughly linear in the low density and high density regimes.
Additionally, there is a kink in the phase transformation (blue) regime, indicative ofmaterial transformation in this range of particle velocities.
We observe that the shock velocity-particle velocity curve is approximately linear
in the low density and high density regimes. This agrees with experimental observa-
tions which suggest that the shock velocity is linearly related to the particle velocity
in materials not undergoing transformation. This linear relation is usually written as
Us = CO + S1Up (2.22)
where CO (the ambient pressure bulk sound velocity) and Si are tabulated in the lit-
erature for various materials [2, 221. This approximately linear relationship between
U, and Up in the low and high density regimes suggests that a Mie-Gruneisen equa-
tion of state could be used to model the pressure-density behavior of glass in these
regimes, rather than the low and high density equations in Equations 2.5 and 2.6.
This motivated us to perform a linear fit to the U, - U, curves in the low and high
37

density regimes to obtain appropriate coefficient values if the linear representation
in Equation 2.22 was used. The values obtained for Co and S1 in each regime are
tabulated in Table 2.3.
Co (m/s) SiLow Density 3877.6 0.7753High Density 1129.2 1.4364
Table 2.3: Coefficient values for Co and S in the Low Density and High Density
Regimes Obtained by a Linear Fit to U, - Up curves.
A linear relationship for U and Up with the constants in Table 2.3 would give
similar shock behavior of glass to the low and high density equation of state. However,
a linear relation could not be used to represent behavior in the phase transition regime,
as the form in Equation 2.22 is not applicable during transformation. As expected,
the behavior of the U, - Up curve in this regime in nonlinear.
Our equation of state describes the volumetric behavior of glass for a wide variety
of pressures. To capture the deviatoric response of glass, we use a strain energy
density function of the Neohookean type. This is based on a Neohookean potential
given by
)= [trC - 3] (2.23)2
where p is the second Lam6 parameter (also known as the shear modulus) and C is the
right Cauchy-Green tensor. The volumetric response from the equation of state for
glass may be combined with the deviatoric response from the Neohookean potential
to give the final description of glass under pressure and shear loading. In particular,
the Cauchy stress tensor describing the behavior of glass under loading is comprised
of a pressure response p from the EoS model and a deviatoric stress response of 0.dev
from the Neohookean model as follows
0 .=dev + pI (2.24)neo
where I denotes the identity tensor. We use the Neohookean model as a simple
description for the response of glass under deviatoric loading. Nevertheless, this gives
38

a complete description of glass behavior under multiaxial loading, accounting for its
transformation process. While the model describes the volumetric response of glass
during the transformation process, it is a purely elastic model and therefore unable to
capture any type of plastic effects. In particular, the model is forced to unload back
to the original density regardless of the loading pressure. Thus, it cannot capture any
permanent changes in density that occur as a result of permanent densification.
2.2.2 Introducing Inelasticity (a first attempt)
In order to address the limitations of our previous model, we introduce an internal
variable to capture permanent densification of glass. This internal variable, denoted
by , represents the degree of transformation of glass and is given by
P -Ponset (2.25)PFinal - POnset
In Equation 2.25, Ponset = 2800 kg/'m3 refers to the density at the onset of transfor-
mation in glass, PFinal = 5000 kg/m3 refers to the density at the end of transformation,
and p is the current density. If p < POnset, then = 0 indicating that no transforma-
tion has taken place yet. If p > PFinal, = 1 indicating that the glass has fully trans-
formed. Lastly, for densities within the phase transition regime (Ponset < P < PFinal),
( may take on any value between 0 and 1.
During the loading process, the maximum amount of densification achieved up
to the current step is stored. Given this value of and the current density p, the
unloading path is fully defined. This is done by defining the density after unloading
as pp (where the subscript P stands for permanent), given by
Po = po + (P -Po) (2.26)
which will be larger than po for positive amounts of transformation ( > 0). Given
p and pp, one may define a linear unloading path as shown in Figure 2-6. If = 0,
the unloading path will follow the low density EoS. If = 1, the unloading path will
39

Glass EOS
-Low DensityPhase Transition
50 - High Denssty
0. 40
0..30
:3
20
Unloading Path10
0 - ----------
2000 2500 3000 3500 4000 4500 5000 55
Density, p [kg/m3I
Figure 2-6: Unloading Path from an arbitrary density to the corresi
density pp, denoted by PUnload in this figure.ponding unloading
follow the high density EoS. Otherwise, a linear unloading path will be defined as
described above. In summary, the material will simply follow the behavior of the
EoS under loading conditions, but upon unloading will follow a new unloading path
dictated by the current density p and degree of transformation .
A quadrature point constitutive test involving cyclic hydrostatic compression load-
ing and unloading was conducted in order to exhibit the permanent densification
effects present in this model. During a constitutive test, a deformation gradient is
provided and the constitutive model is used to compute the resulting stress tensor.
In the case of hydrostatic compression, the deformation gradient is given by
A 0 0
F = 0 A 0 where A < 1
0 0 A
where a smaller value of A represents a larger amount of compression. During a
hydrostatic compression constitutive test, A is decreased over many time steps, and
the stresses are computed at each time step.
40
0

In this cyclic loading test, we apply hydrostatic pressure to a value within the
phase transformation regime, unloading completely, and subsequently reload to a
higher pressure. This procedure was repeated for a number of cycles. This cyclic test
resulted in the pressure-density behavior shown in Figure 2-7. We observe that the
model is capable of exhibiting different degrees of permanent densification based on
the applied pressure. Reloading of the densified glass in a given cycle also follows
the previous unloading path, exhibiting the model's ability to track history. Lastly,
the model exhibits 77% relative densification after unloading in the final cycle, in
agreement with measurements by Sato [28].
50
Pressure Vs Density
~30-
S20-
10-
02000 2500 3000 3500 4000 4500 5000 5500
Densty (kg/m1m
Figure 2-7: Volumetric Behavior of Model under Cyclic Hydrostatic Loading andUnloading. The model unloads to various densities based on the initially appliedpressure, illustrating that the model may be used to achieve various degrees of per-manent densification.
Our new model is able to capture the volumetric behavior of glass during den-
sification, as well as model permanent changes in density from loading to pressures
greater than 10 GPa. However, permanent densification is captured in an ad-hoc
manner through the introduction of an internal variable. In the next section, we
turn to a more comprehensive 3D tensorial plasticity model for capturing permanent
densification effects.
41

2.2.3 Inelastic Model for Glass Densification
Our final constitutive model for glass is based on the Camclay theory of granular
plasticity. Camclay is a volumetric plasticity model generally used to represent the
behavior of granular materials such as sand or clay. The deformation behavior of
these materials have some mechanisms in common with glass. For example, sand
and clay exhibit deformation behavior that is highly dependent on pressure, and
accompanied by a significant reduction in volume under pressure. This behavior is
similar to observations of glass densification under extreme pressures. It is this feature
of the model that makes it attractive for modeling glass densification.
A variational formulation of the Camclay model is presented by Ortiz and Pan-
dolfi in [25] (outlined in Appendix B). They also provide references for more classical
papers on the Camclay theory. For our model, we combine the densification un-
der pressure available through Camclay with the volumetric response of glass given
in Equation 2.14. For completeness, an overview of key aspects of the constitutive
model are provided below. The update algorithm for this constitutive model is pro-
vided in Appendix C.
Kinematics
A multiplicative decomposition of the deformation gradient into an elastic and plastic
part is assumed
F = FFP (2.27)
From the elastic part, one can compute the elastic right-Cauchy Green tensor
Ce = F eT Fe (2.28)
A logarithmic elastic strain measure based on the right Cauchy-Green tensor is used
in this finite deformation setting
Oe = - log(Ce) (2.29)2
42

Free energy
The constitutive model is based on a free energy W which we require to have the
following arguments
W (F, FP, T, q) (2.30)
where q represents a set of internal variables specialized to the constitutive model. The
free energy can be additively decomposed into an elastic free energy and a "plastic"
free energy with the following arguments
W(F, FP, T, q) = We (Ce, T) + WP(T, q, FP) (2.31)
where We must depend on the deformation via the right-Cauchy Green tensor Ce
due to the requirements of material frame-indifference. The elastic free energy may
be further decomposed into deviatoric and volumetric parts
We(Cc, T) = We'""'(Je, T) + We'dev(Ce'dev, T) (2.32)
where the elastic jacobian is given by
Je = det(Fe) (2.33)
Volumetric Elasticity (EoS)
The volumetric portion of the elastic energy is given by
Wevol(Je T) = f (J) + poCT I - log - (2.34)TO
where f(J') is defined such that the corresponding pressure is the equation of state
given in 2.14.
Deviatoric Elasticity
The deviatoric portion of the elastic energy is given by
We,dev (e IT) = t e 2 (2.35)
43

where e' is the deviatoric part of the logarithmic elastic strain
ee = e - -tr(Ce)I (2.36)3
and p is the shear modulus.
Stored Energy
To account for permanent compression effects, we introduce the volumetric plastic
strain
OP = log JP (2.37)
where the plastic Jacobian is defined as
JP = det FP (2.38)
The stored energy is based on the plastic Jacobian, the effective plastic strain, and
temperature
WP(T, e', OP) (2.39)
Yield Criterion
The model utilizes an elliptic yield surface to determine whether plasticity is occur-
ring. The yield surface is described in the pressure-shear space by the following yield
q
PC PO P
Figure 2-8: Yield Surface for Camclay Model
44

condition
f(p, q) = q2 + a2 (p - Po) -a2 (2.40)
where p and q are the effective pressure and shear stress corresponding to a stress
state and may be computed by
1 011 + 0-22 + 0-33 (2.41)3 3
q = V -i- = (0-11 + 0-22 + 0-33 + 20-12 + 20-13 + 20-23) (2.42)
where o-rj is the Cauchy stress tensor. Under conditions of pure elasticity, the Cauchy
stress tensor is
o- = 2pe' + pI (2.43)
where ee and p are defined in Equations 2.36 and 2.14 respectively.
Flow Rule
A flow rule of the form in Equation 2.44 is assumed to describe the evolution of the
plastic deformation gradient
P = DPFP-1 = (PM)FP- 1 , &P > 0 (2.44)
where M is a symmetric tensor defining the direction of plastic flow and satisfying
the kinematic constraint below,
12S(trM2 + pme j mdev = 1 (2.45)
ae 3
a is the internal friction parameter and MAde is the deviatoric part of M given by
1Mdev = M - -(trM)I (2.46)
3
45

Pressure Hardening Behavior
In the presence of densification, the volumetric response (i.e. pressure) transitions
smoothly from the low density EoS to the high density EoS. To achieve this objective,
we start by defining the relative densification
= PP - Po - -1 (2.47)Po Po
where po represents the original density of glass, and pp represents the final density
of glass after being subjected to a loading and unloading cycle involving densifica-
tion. Furthermore, the plastic jacobian physically represents the ratio of volumes or
densities
Jp - - 0 (2.48)
So the relative densification is related to plastic jacobian as follows
AP = - - 1 (2.49)JP
where we may simply compute JP as the determinant of our plastic deformation
gradient. Finally, the pressure can be computed as a weighted average of the low
and high EoS in order to account for transformation. The form in Equation 2.50
gives a good match to experimental data. We include the arguments of AP and the
equations of state to be explicit about the dependence of pressure on elastic and
plastic compression.
p = ( \1 - 2AP(JP)pi0o eos(J') + (1 - \1 - 2AP(JP))Phigh eos(J) (2.50)
One key difference between the standard Camclay model and our modified model
for glass is the predicted pressure response. The original Camclay model uses a loga-
rithmic equation of state (p = K log J) to describe pressure experienced by granular
materials. However, we use the low density equation of state (Equation 2.5) for glass
here (under elastic conditions). Under plasticity, our pressure response is also mod-
46

ified from the Camelay model. In our model, yielding represents the occurrence of
permanent densification in glass as this is an irreversible process. We calibrate our
model parameters so that yielding begins at the experimentally observed hydrostatic
pressure of 10 GPa (as described in Reference 138]).
Our constitutive model contains a number of parameters given in Table 2.4. These
parameters were adjusted to accurately reflect the behavior of glass. For example,
the elastic moduli for glass are given in the literature (E = 71 GPa, v = 0.17). In
our model, E and v are used to specify the shear response of glass (the correspond-
ing shear modulus is G = 30.1 GPa), while the volumetric response is given by the
equation of state. The remaining parameters were obtained by tuning the model so
that yielding would begin at 10 GPa (representing the onset of permanent densifica-
tion as described previously), and so that the pressure-density behavior would match
closely with pressure-density data available in the literature. Table 2.4 lists the ma-
terial parameter values which are representative for a granular material such as clay
(Reference [10]) and our modified parameters chosen to represent glass behavior.
Parameter Name Symbol Value for Clay Value for GlassDensity p 1529 kg/m 3 2200 kg/m 3
Young's Modulus E 750 71 GPaPoisson ratio v 0.4 0.17
Reference Pressure Pref 0.5 Pa 10 GPaReference Plastic Volumetric Strain OP 0.75 0.5
Preconsolidation Pressure Pc 1.0 MPa 20 GPaRate Sensitivity Parameter r/ 1.0 kPa-s 1.0 kPa-s
Friction Angle _ 100 23.20
Table 2.4: Model parameters and values for clay (from [10]) and those calibrated forglass. Parameters for Glass were obtained by tuning volumetric behavior of the modelto match available experimental data, and by ensuring plasticity begins at 10 GPacorresponding to the onset of permanent densification.
To illustrate the volumetric behavior of our new model, we first perform a cyclic
hydrostatic test to full densification on a single quadrature point. Loading was per-
formed to a pressure of 80 GPa, with unloading following subsequently. The model
parameters used for the test are shown in Table 2.4. The pressure-density plot re-
47

sulting from the test is shown in Figure 2-9, alongside experimental pressure-density
data for glass reproduced from the following sources: Alexander [1], Sato 128], Marsh
[20]. We observe a satisfactory match between volumetric behavior predicted by the
model and the provided pressure-density data. Furthermore, the model exhibits per-
manent densification upon unloading. In fact, we observe 77% relative densification
to a density of p = 3900 kg/m 3 as suggested by Sato in [28]. Our phenomenological
model accounts for the volumetric deformation behavior of glass and its ability to
demonstrate significant permanent densification.
90
80
70
60
so
40
20
10 -
200
0 Lhnawmids D.ataC, Marsh LASL Dataa Satm Data Pressure Vs Density
Se
2500 3000 3500 4000Denskty (kq'nS I
4500 5000 5500
Figure 2-9: Volumetric Behavior of inelastic model for glass obtained from hydrostatic
loading and unloading. The model shows a good match to experimental data availablein the literature from Alexander [11, Sato [28] and Marsh [20]. Furthermore, it exhibits77% relative densification upon unloading from high pressures of approximately 80GPa.
We perform an additional cyclic loading test to partial amounts of densification.
Hydrostatic loading was performed to a pressure of 20 GPa, after which unloading
occurred. This loading and unloading was repeated for a few cycles, with each sub-
sequent loading pressure being higher than the one before. Pressures of 20, 40, 60,
80 and 100 GPa were used for the test. The pressure density curve resulting from
this cyclic loading constitutive test are shown in Figure 2-10. Our model exhibits
48
0~
eoe
0

100
- Glass E7
~40-
02000 2500 3000 3500 4000 4500 5000 5500
Deinsity fkg,, I
Figure 2-10: Volumetric behavior of inelastic model under cyclic loading. The modelallows for various degrees of permanent densification to be achieved, based on theapplied loading pressure.
various degrees of permanent densification upon unloading from different pressures.
Table 2.5 summarizes the final densities obtained from unloading from the applied
pressures during the cyclic test. The relative densification saturates at 77%, at a
pressure between 80 GPa and 100 GPa. We also plot the amount of densification
Loading Pressure Final Density Upon Unloading Relative Densification (in %)20 GPa 2,230 kg/m3 1.3%40 GPa 2,670 kg/m3 21.3%60 GPa 3, 101 kg/m 3 41 %80 GPa 3,718 kg/M 3 69 %100 GPa 3,900 kg/m3 77.3%
Table 2.5: Permanent Densification as a result of unloading from pressures of20,40, 60,80, 100 GPa using inelastic model for glass.
due to unloading from pressures between 0 and 100 GPa in Figure 2-11. We observe
that for pressures below 10 GPa, the model predicts no densification, as expected.
At approximately 85 GPa; however, the relative densification saturates to a value
of 77%, indicating full transformation to the high density glass. For pressures in
49

between this range, the relative densification appears to grow fairly linearly. This
relationship between loading pressure and relative densification is predicted by our
phenomenological model, but not necessarily representative of the true densification
behavior of glass. Experimental data on this relationship is required so that we may
calibrate model parameters to more accurately capture the true behavior.
-0
cO0
d)
a)
QU
80
70
60-
50
40
30
20
10
0I0 ~-------------- --- i----- -----I--------- ---
0 20 40 60 80 100Loading Pressure [GPaI
Figure 2-11: Relative densification (in %) observed upon unloading from hydro-static pressures between 0 and 80 GPa. Our model predicts a fairly linear pressure-densification behavior, with densification beginning at a pressure of 10 GPa (as ob-
served in experiments) and ending close to 80 GPa.
The tests conducted so far give insights into the model behavior under volumetric
loading. The following constitutive tests explore the deviatoric behavior of this model
for glass, as well as its response to combined pressure-shear loading.
For our first study of the deviatoric response of the model, we apply hydrostatic
pressure followed by a simple shear deformation. The deformation gradient corre-
sponding to a shear deformation is given by (where -y is the shear strain)
01 0
F= 0 1 0
0 0 1
50

We perform this test to determine the effect of pressure on deviatoric response of
the model. Initially applied pressures of p = 0, 10, 20, 30,40, 50 GPa were used for
the test. For each applied pressure, the shear stress as a function of shear strain is
obtained, shown in Figure 2-12.
Shear Stress Vs Shear Strain Upon Initially Applied Pressure
- P= 0 GPa- P=IOGPa
6 - .P=20 GPa- P 30 GPa- P= 40 G:Pa
P= 50 GPa
02
0
0.00.05 010 0.15 0.20Shear Strain
Figure 2-12: Shear Stress vs. Shear Strain for constitutive test in which various initial
pressures are applied followed by a shear deformation which is increased up to a value
of 7 = 0.2. The results illustrate that higher initial pressures result in higher shear
stresses at a given shear strain.
To more thoroughly quantify the effect of pressure on initial shear stress, the test
was repeated with p = 0, 2, 4, 6, 8 GPa compressive and tensile pressures, and in every
case, a measure of the effective shear modulus was obtained by taking the ratio of
the shear stress and the shear strain in the initial linear regime
S= 2 (2.51)
The variation of the shear modulus with initial pressure is shown in Figure 2-13. Fig-
ures 2-12 and 2-13 suggest that the larger the initially applied pressure, the greater
the amount of shear stress predicted by the model for a given strain level. In other
words, the effective shear modulus is greater for larger initial pressures.This is a phys-
51
.. A

Shear Modulus Vs Pressure
34
36
34
32
30
28-10 0 15 20D 30 40 W0
Pressure [GPa]
Figure 2-13: Variation of effective shear modulus with initial pressure. The shear
modulus increases as the applied hydrostatic pressure increases.
ically meaningful description of the response of granular materials to pressure-shear
loading, as an initial pressure can cause grains to develop a large amount of inter-
nal friction, facilitating high shear stresses upon shear deformation. This behavior is
likely true for glass as well, as the pressure can cause atoms to come closer in contact
with each other. Thus, subsequent shear deformation will cause large internal shear
stresses between the atoms.
A similar pressure-shear loading test was conducting by Schill et al. in [291 in their
MD simulations of silica. They also obtain the shear modulus behavior as a function
of pressure. However, unlike our response which is purely increasing, they observe a
dip in shear modulus for pressures between 0 - 3 GPa. This drop in shear modulus at
low pressures has been experimentally observed in glass [38, 7]. To improve our model,
we may further calibrate our shear response to capture experimental observations of
deviatoric behavior of glass.
We performed another constitutive test combining pressure and shear. In this
test, we impose a shear strain, followed by an applied hydrostatic pressure. Shear
strains of -y = 0.1, 0.2,0.3, 0.4, 0.5 are initially applied. Then, we apply a hydrostatic
pressure of 50 GPa and then unload. The pressure response resulting from this test
52

was recorded for each value of -y, and is shown in Figure 2-14.
Pressure vs. Compression Upon Initially AppIlied Shear Strain
=B.
0 01 0.2 03 04 03 06 07 0.8Volumetric Strain
Figure 2-14: Pressure vs. Volumetric Compression Results for constitutive test inwhich various initial shear strains are applied followed by pressure loading to 50GPa and unloading. The results illustrate no dependence of the volumetric behavior
predicted by the model on initially applied shear strains.
Figure 2-14 illustrates that the pressure response predicted by the model is un-
affected by the initially applied shear strains. The amount of plasticity observed in
each case is also the same. In reality, we might expect glass to experience larger
densification with larger initial shear deformation (as Mackenzie explains that shear
can facilitate densification in [191).
In the preceding sections, we have presented three constitutive models on glass
transformation. Our final model takes advantage of Camclay's ability to represent
permanent volumetric reduction, and combines this model with the expected volu-
metric deformation behavior of glass. Various constitutive tests are performed to
illustrate the behavior of each model under different loading conditions. To conclude
our description of the computational framework, we introduce the governing equa-
tions and their spatial and temporal discretization using the finite element method
in the next section.
53
2.3 Numerical Implementation of Governing Field
Equations
In order to complete our description of the computational framework, we describe
the discretization used in the finite element method to solve the balance of linear
momentum. The strong form of the partial differential equation (PDE) corresponding
to the balance of linear momentum is given by
po = Vo - P + poBo E Bo (2.52)
In Equation 2.52, B0 is the region occupied by the body in its reference configuration,
po is the initial density of the body, ; is the acceleration of the body, and BO is an
applied body force. Boundary conditions are also present. These may be either
Dirichlet boundary conditions through which displacement is prescribed on the body,
or Neumann type boundary conditions where traction is prescribed. The Dirichlet
and Neumann conditions are given by Equations 2.53 and 2.54, respectively
= on aDB0 (2.53)
P-N =Ton aNBO (2.54)
where &DBO and aNBo represent the set of points on which Dirichlet and Neumann
boundary conditions are applied, respectively. The union of these points comprises
the entire body (as indicated in Equation 2.55) whereas the intersection of these
points is null (Equation 2.56), as no point has more than one boundary condition
specified.
&NBO U &DBO = 0BO (2.55)
aNBo n&DBo = 0 (2.56)
Equations 2.52-2.54 complete our description of the boundary value problem (BVP)
of elasticity. To solve the linear momentum balance equation using the finite element
54

method, the PDE must be recast in its weak form by multiplying by a test func-
tion and integrating over the domain. In the case of continuous Galerkin (CG), we
integrate over the entire body and obtain the following weak form
(P(3h- 'Wh + Ph: VO6Oh)dV = 5 pOB - 6 PhdV + j 6W'TdSe~~~~ Oe9 60Bnh
(2.57)
where Ph is a continuous polynomial approximation for the deformation map for each
element and 6 'h is a trial function. Equation 2.57 refers to the Continuous Galerkin
(CG) weak formulation of the linear momentum balance PDE. To incorporate frac-
ture, we utilize a weak formulation that is based on the discontinuous Galerkin (DG)
formulation coupled with a cohesive zone model (CZM). This leads to an alternative
weak formulation for the balance of linear momentum
f0h [P63h ' 6Ph + Ph : Vo0h] dV
+ Ji h [aT ([h) - [A. 1 + (1 - a) [6 4h] - K^) - N-] dS (2.58)
+ (1 - a) [oh & N- : - C) : [h1 ®9 N- dSa IQ0h hs
fOh Whd + j T_ SS6hdSOh 0,N
In 2.58, [e] and (.) represent the jump and average operators on the internal boundary
respectively, defined by [e [ - -] and (.) =[+ + e-]. Furthermore, 3 is
a stability parameter, h, is a characteristic element size, C = is the LagrangianaF
tangent moduli and a is a parameter equal to either 0 or 1 (a value of 1 indicates
that fracture is occurring). More details regarding the weak form in Equation 2.58
can be found in [27].
Lastly, numerical discretizations may be applied to Equations 2.57 and 2.58 to make
these weak forms solvable via the finite element method.
55

2.3.1 Spatial Discretization
A finite element approximation to the deformation map may be expressed as
nodes
.(Phi(X, t) = 1j Xia(t)Na(X) (2.59)a
where Xia (equal to >hi(Xa, t)) are the spatial nodal coordinates, Xa are the material
nodal coordinates, and Na represents the material shape functions. Applying this
finite element representation to the balance of linear momentum given by Equation
2.57 yields its semi-discrete form
Z Mia k -kb+fPt (X, fa(t) (2.60)b
where
Viakb Joj PO ikNaNbdQo (2.61)
fii t = P1 Nae,1 dQo (2.62)J e
e 0
denote the consistent mass matrix and internal force array, respectively. Additionally,
, and f ext represent the acceleration array, and external force array resulting from
surface tractions and applied body forces, respectively. The acceleration array may
be further discretized via temporal discretization.
2.3.2 Temporal Discretization
The lumped mass matrix Newmark method, expressed in Equations 2.63-2.65 was
applied for temporal discretization. The Newmark parameters 0 and -' in Equations
56

2.63-2.65 were set to 0 and 0.5, respectively, for our studies.
x+1 = x + Att + At 2 i~n + 0 1+ .][yi i i 1 (2.63)
.x 1 = x + At[(1 - _), mn 1] (2.64)
S+1 = mMl [fe - fintln+1 (2.65)
In the scheme above MLi is the lumped mass matrix, f ext and fi"t refer to the
external and internal forces, respectively, and At is the time step used. The nodal
displacements may be found using the Newmark scheme, which may then be applied
to update the nodal coordinates, velocities and accelerations.
2.4 Summary
In this Chapter, we have provided an overview of the computational framework for
our work. In particular, we present the basic kinematics, governing equations, and the
constitutive models developed in this work. Our first constitutive model for glass was
an equation of state for glass capturing its volumetric behavior in all pressure regimes
including the transformation regime, coupled with a Neohookean shear model. We
extended this elastic model to include plasticity for modeling permanent. densification
by introducing an internal variable representing the degree of transformation. This
internal variable allowed us to define an unloading path, so that upon unloading
from high pressures (greater than 10 GPa), the material would have a higher density
than before. Our final model for glass densification was inspired by the Camelay
volumetric plasticity model, which was a full tensorial plasticity model (as opposed
to our previous model which illustrate ID plasticity in pressure). We were able to tune
our constitutive model parameters to give a good match to experimental pressure-
density data, and also exhibit severe permanent densification (77% as hypothesized
by Sato). Our combined pressure-shear constitutive tests exhibited expected behavior
of glass, although the model could be improved by incorporating the effect of shear
on volumetric behavior (see Figure 2-14).
57

58

Chapter 3
Shock Physics in Glass
The transformation of glass occurs under extremely high pressures involving shock
loading conditions. As a result, it is essential to test our constitutive models under
such conditions, and ensure that they behave robustly and provide results consistent
with shock theory. In this chapter, we explain the steps taken to verify our models
under shock loading.
3.1 Unidimensional Shocks
An idealized piston problem was formulated in order to test the constitutive models
described in Chapter 2. The setup for the piston boundary value problem is given in
Figure 3-1.
Figure 3-1: Boundary Value
velocity is applied to the barProblem (BVP) Setup for idealized piston. A piston
to initiate a shock wave.
In this problem, a bar of length L = 1 m and width w = 0.2 m was subjected
to shock loading initiated by a piston velocity Up which was continuously applied to
59
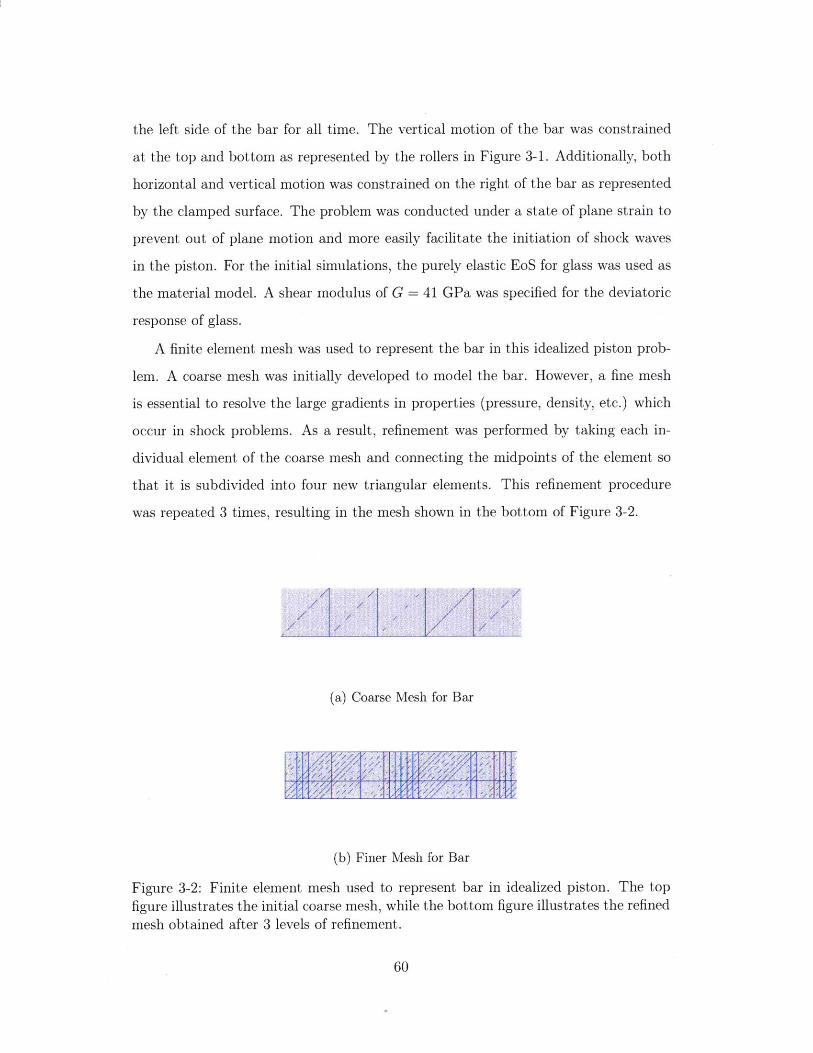
the left side of the bar for all time. The vertical motion of the bar was constrained
at the top and bottom as represented by the rollers in Figure 3-1. Additionally, both
horizontal and vertical motion was constrained on the right of the bar as represented
by the clamped surface. The problem was conducted under a state of plane strain to
prevent out of plane motion and more easily facilitate the initiation of shock waves
in the piston. For the initial simulations, the purely elastic EoS for glass was used as
the material model. A shear modulus of G = 41 GPa was specified for the deviatoric
response of glass.
A finite element mesh was used to represent the bar in this idealized piston prob-
lem. A coarse mesh was initially developed to model the bar. However, a fine mesh
is essential to resolve the large gradients in properties (pressure, density, etc.) which
occur in shock problems. As a result, refinement was performed by taking each in-
dividual element of the coarse mesh and connecting the midpoints of the element so
that it is subdivided into four new triangular elements. This refinement procedure
was repeated 3 times, resulting in the mesh shown in the bottom of Figure 3-2.
(a) Coarse Mesh for Bar
(b) Finer Mesh for Bar
Figure 3-2: Finite element mesh used to represent bar in idealized piston. The topfigure illustrates the initial coarse mesh, while the bottom figure illustrates the refinedmesh obtained after 3 levels of refinement.
60
-I

The idealized piston simulation was performed with several applied piston veloci-
ties of Up E [200,400, 600,800, 1000] m/s. The uniaxial stress (a-l) profile was plotted
over the midline of the bar at a time of t = 0.1 ms in the simulation. Here, we treat
ol as the pressure p to obey the conventions of shock theory [2]. Thus, pressure pro-
files were obtained for each of the different piston velocity cases, as shown in Figure
3-3.
Shock Profiles at time t=o. I.s for various piston velocities
- U, =40I0 M/l
- LIP =6We,.
00.0 0.2 0.4 0.6 08 1.0
Positon along Bar [m]
Figure 3-3: Pressure Profiles along length of bar at time t = 0.1 ms for various
piston velocities. The results show significant amounts of oscillation, which increase
in magnitude with increasing piston velocity.
FRom Figure 3-3, we observe that the pressure profiles, or shock waves, exhibit
severe amounts of oscillation, particularly for high piston velocities. These oscillations
are non-physical and are generally an artifact of the mesh discretization used in order
to solve the problem numerically. Furthermore, they illustrate the need for numerical
dissipation to dampen the oscillations present in the shock waves in Figure 3-3. This
dampening may be achieved through the use of artificial viscosity.
3.1.1 Artificial Viscosity
Artificial viscosity refers to the use of numerical dissipation in order to mitigate
spurious numerical oscillations occurring in problems involving shock waves. Here,
61

we discuss an artificial viscosity method formulated by Lew et al. in Reference [181
which we subsequently apply in our simulations to prevent oscillations resulting from
shock waves, while preventing smearing of these shocks.
We begin with the general framework for the treatment of constitutive equations,
which involves an additive decomposition of the first Piola-Kirchoff stress tensor into
an equilibrium part Pe and a viscous part Pv as follows
P = PC + Pv (3.1)
It is assumed that the equilibrium stress is of the form
PC(F, U) = -Jp(J, U)F- T (3.2)
where p(J, U) is the pressure given by the equation of state. Additionally, the viscous
stress is of the form
Pv(, F) = J-vF-T (3.3)
where
a-" = 2,q (sym (NF-') (3.4)
and n is the Newtonian viscosity coefficient. One may consider the addition of an
artificial viscosity A71 to the actual Newtonian viscosity n, so that the total viscosity
is given by
nh=7+A7 (3.5)
The artificial viscosity coefficient A17 may be computed as follows
{max(, - lp(cAU - cLa) - 7) Au < 0
In Equation 3.6, 1 is a measure of the element size, Au is a measure of the velocity
jump, and a is a characteristic sound speed of the material such as the celerity.
The artificial viscosity coefficient An is computed at every gauss point during finite
62

element calculations. The element size 1 and velocity jump Au are computed using
the following expressions
1g = Jgd! QeJ (3.7)
AUg = 1log J (3.8)
where the subscript g denotes evaluation at the gauss points. One can approximate
the value of Aug as follows
ln1 ogJ 1 -l og J (39)- At
Equation 3.6 also contains artificial viscosity coefficients ci and CL that may be ad-
justed based on the equation of state under consideration and the shock strength.
Typically, the value of c1 = 1.0 while CL may vary between 0.1 and 1.0. A larger
value of CL tends to reduce oscillations heavily while smearing out the shock, while a
smaller value will keep the shock front sharp, but allow some oscillation to remain.
The artificial viscosity described above was applied to the idealized piston problem
in order to mitigate the presence of oscillations. For each piston velocity, the value of
the artificial viscosity parameter CL was tuned in order to prevent large oscillations
while keeping the shock front as sharp as possible. Meanwhile, the value of ci was
kept at unity. The new shock wave profiles resulting from the use of artificial viscosity
are shown in Figure 3-4. Additionally, a table of values of the artificial viscosity
parameters used for each piston velocity is shown in Table 3.1.
UP C1 CL200 m/s 1.0 0.5400 m/s 1.0 0.6600 m/s 1.0 0.7800 m/s 1.0 0.71000 m/s 1.0 0.7
Table 3.1: Tuned Artificial Viscosity Parameters chosen for each piston velocity caseto mitigate oscillations present in shock waves while minimizing the amount of smear-
ing. Higher piston velocities use slightly higher values of CL.
63

Shock Profiles at f =DA ms for various piston velocities
0.4 0.6Position along Bar [m]
Figure 3-4: Shock Waves along length of bar at time t = 0.1 ms for various piston
velocities. The oscillations previously present have been mitigated through the use
of artificial viscosity.
The oscillations present in the initial shock wave results have been removed in
Figure 3-4. Additionally, although there is some smearing present, the shock waves
generally remain sharp. Ideal values of CL were larger for the higher piston velocity
cases which exhibited more serious amounts of oscillations. Overall, the introduction
of artificial viscosity eliminates the spurious oscillations which are present from the
numerical solution of shock problems. In the remainder of this chapter, we discuss
the verification studies conducted to ensure that the constitutive models obey shock
theory. Artificial viscosity was applied in these studies to mitigate oscillations.
3.2 Verifying the Rankine-Hugoniot Jump Conditions
Under Elastic Conditions
The Rankine-Hugoniot jump conditions, introduced earlier in Chapter 2 and repeated
below in Equations 3.10-3.12, represent conservation of mass, momentum and energy
in the presence of shock waves [2]. Furthermore, they relate thermodynamic properties
64
14
12
10
=2 ra'!
4 Xf r! s
00 =$I! s
C.8
6
4
2
N
N
010-I 0.2 0.8 1.0D

in the shocked and unshocked regions separated by a shock wave.
Mass poUs = p(Us - Up) (3.10)
Momentum P - Po = poUU, (3.11)
1Energy E - EO= -(P + Po)(V - V) (3.12)
2
In our idealized piston problem, the piston velocity UP creates a shock wave that
separates these shocked and unshocked regions. This is shown in Figure 3-5, where a
shock wave initiated by a piston velocity of Up = 1000 m/s has traveled to the center
of the bar, separating the two regions. The left portion of the bar (in blue) has been
shocked to a pressure of approximately 14 GPa, while the right portion (in red) is
unshocked, as may be observed on the right plot indicating pressure values.
Figure 3-5: Shock in Piston separating shocked and unshocked regions. The shock
has traveled halfway through the bar (left) causing a jump in the pressure between
the two regions (right).
To verify the Rankine-Hugoniot relations, one may measure the thermodynamic
properties in the shocked and unshocked regions and ensure that the values of these
properties satisfy the jump conditions. These conditions assume that the material
under consideration may be idealized as a fluid and has no strength in shear [22] [2].
65

Thus, in order to verify that the conditions hold, we must assume that the shear
modulus of our material G = 0.
In order to verify that the mass and momentum jump conditions were satisfied, pis-
ton simulations was conducted using the elastic EoS model for Up E [200, 400, 600, 800, 10001
m/s. Additionally, the artificial viscosity coefficients shown in Table 3.1 were used
for each case. However, the shear modulus was set to zero so that the bar could be
idealized as a fluid such that the Rankine-Hugoniot conditions could be verified.
Algebraic manipulations were performed on the mass jump condition to make it
easier to verify. Taking Equation 3.10 and solving for the jacobian J(= P) yieldsp
J - 1 - UP (3.13)p U
where J represents the ratio between the deformed and undeformed volumes. Addi-
tionally, the momentum jump condition is given by
P = pOU5 Up (3.14)
From the simulations, one may directly measure quantities such as J and P. Ad-
ditionally, given the relation between U, and Up as shown in Figure 2-5, one may
obtain the theoretical relationship between J and Up by applying the mass conser-
vation equation (Equation 3.13), as well as P and Up from the momentum equation
(Equation 3.11).
A table of results indicating shock speed, pressure, and jacobian for piston ve-
locities of Up E [200,400, 600, 800, 1000] m/s is shown in Table 3.2. The table shows
values obtained from the simulations, as well as theoretically expected values obtained
by applying the jump conditions for each piston velocity. The simulation shock speed
was estimated by extracting the time taken for the shock to travel halfway across
the bar, and dividing the length traveled (half of the bar, or 0.5 m) by this value.
Additionally, the pressure was directly measured by taking o in the shocked region,
and the jacobian was obtained by taking the determinant of the deformation gradi-
66

ent F in this region, using the postprocessing software. All quantities were obtained
independently. We observe a very close match between theoretical and simulation
shock speeds, pressures, and jacobians for all applied piston velocities.
Up Us Us,theoretical J Jtheoretical P Ptheoretical
200 m/s 4034 m/s 4033 m/s 0.95 0.95 1.79 GPa 1.77 GPa400 m/s 4205 m/s 4185 m/s 0.9045 0.9044 3.68 GPa 3.68 GPa600 m/s 4327 m/s 4340 m/s 0.862 0.862 5.72 GPa 5.73 GPa800 m/s 4513 m/s 4498 m/s 0.8224 0.8222 7.90 GPa 7.92 GPa1000 m/s 4625 m/s 4657 m/s 0.784 0.786 10.22 GPa 10.22 GPa
Table 3.2: Table of Results indicating the simulation results for shock velocity Us,jacobian J, pressure P and the corresponding theoretical values for various pistonvelocities Up. There is a good match between simulation and theoretical results forall parameters and piston velocities, indicating that the jump conditions are satisfied.
The simulation results presented in Table 3.2 are also plotted as data points along
with the theoretically expected shock velocity, jacobian and pressure as blue curves
in Figure 3-6, for piston velocities between 0 and 1000 m/s. The theoretical values
were obtained by taking the U, - Up representation of the EoS and applying the jump
conditions to transform it into the corresponding J - U and P - Up relations. Overall,
the data points line up with the theoretically predicted curves, indicating a good
match between results. There are some discrepancies between the theoretical and
simulation shock velocities since the shock velocities were estimated. However, the
good match between simulation and theoretical results for the jacobian and pressure,
representing conservation of mass and momentum respectively, illustrates that each
condition is verified.
The piston velocities applied here correspond to those in the low density regime,
before glass transformation occurs (one may refer to 2-5 to verify this). Since our
inelastic model for glass also obeys the low density EoS in this regime, this model
would give the same results (the Rankine-Hugoniot jump conditions would also be
satisfied using the inelastic model). In the next section, we study the shock phe-
nomenon predicted by the inelastic model under plastic conditions, and verify that
this behavior obeys expectations of shock theory.
67

4400k
43 -4200
4100
400D
If, [rn/si
(a) Shock versus Particle Velocity
1- Theareicalo Smabton
D.95
09
0.8
0.750 200 400 600 800 1000
UI m/s
(b) Jacobian versus Particle Velocity
12
0 Sm~abton10
0 200 400 600 WJO 1000
(c) Pressure versus Particle Velocity
Figure 3-6: Comparison of theoretically expected shock velocity, jacobian, and pres-sure (shown as blue lines) to those found in the simulations (shown as red dots).Theoretically obtained jacobian corresponds to the conservation of mass, while theo-retically obtained pressure corresponds to conservation of momentum. A good matchis found in all three results, illustrating that the jump conditions are satisfied.
68

3.3 Verifying the Plastic Shock Structure Under In-
elastic Conditions
The Rankine-Hugoniot jump conditions only hold under elastic conditions. Therefore,
we cannot expect the conditions to be satisfied at the high pressures where glass
densification takes place. However, we may expect plastic effects to alter the shocks
generated in the bar under such pressures. For example, it is known that elastic-
plastic shocks have a more complex structure than the typically sharp elastic shocks.
Additionally, shock speeds are typically lower under plastic conditions compared to
elastic conditions [22].
To confirm that our simulations also exhibit an elastic-plastic shock under plastic
conditions, the piston problem was run using our inelastic model for glass with a piston
velocity of Up = 2000 m/s, which is large enough to generate pressures necessary for
transformation to occur. For comparison, the problem was also performed using the
same model under purely elastic conditions (the preconsolidation pressure pc was set
to a very high value to prevent plasticity in the model). Shock profiles at time t
0.1 ms were obtained and plotted together for comparison in Figure 3-7.
Figure 3-7 shows the pressure profiles at a time of t 0.1 ns under elastic and
inelastic conditions. Artificial viscosity parameters of ci = CL = 1 were used to miti-
gate the large oscillations which would occur at this high piston velocity. We observe
that the shock pressures achieved under plasticity are lower than those under purely
elastic conditions, due to hardening behavior under plasticity. The plastic shock ob-
served is not as sharp as the elastic shock, due to inelastic effects which cause the
plastic shock to smear out. Furthermore, the plastic shock travels a shorter distance
than the elastic shock, confirming the lower speed of plastic shocks established in
shock theory. Our comparison shows that under inelastic conditions, our simulations
provide qualitative results consistent with the theory.
69

-~ 21
Shock Profiles at t =0.1 ms for Elastic and Inelastic Conditions
D 0.2 0.4 0.6Position Along Bar [m]
0.8
Figure 3-7: Shock Profiles Obtained from applying a piston velocity of U, = 2000 m/s
using the inelastic model for glass transformation under plastic and elastic (the pre-
consolidation pressure pc is set to a very high value to prevent yielding) conditions.
We observe that the elastic shock is much sharper than the plastic shock, and also
travels much farther. The inelastic shock lags behind. These characteristics agree
with the expectations of shock theory.
70
40
35 k-
30
25
- Elastlic-- Inelastic -
0~
0L.5
0~
20 -
15 -
10 -
5
0I0. 1.0
.. .. .. .... .. ... ..

3.4 Summary
In this Chapter, the constitutive models described in Chapter 2 were tested under
shock physics. An idealized piston problem was used to aid in this verification pro-
cess. A description of the artificial viscosity formulation used to mitigate oscillations
resulting from simulating shock problems was discussed. The Rankine-Hugoniot jump
conditions were then verified in the elastic regime by comparing theoretical and sim-
ulation shock velocity, jacobian, and pressure obtained for various piston velocities.
Lastly, the piston problem was performed using a high piston velocity to illustrate
the effects of plasticity. We find that the plastic shocks generated by our simulations
are wider and travel slower than elastic shocks, in agreement with theoretical expec-
tations. Thus, our constitutive models behave robustly and in agreement with theory
under shock loading conditions.
71

72
Chapter 4
Exploring Transformations in Glass
using Simulations
In this Chapter, we describe our efforts to guide the design of high pressure exper-
iments on glass using computational tools and constitutive models. Our goal is to
determine the adequacy of two experimental designs for generating high pressures for
glass transformation. In the first design, laser pulses are used to generate converging
surface acoustic waves (SAWs) which cause high pressures. The second experimental
design is a novel setup in which converging shock waves travel through the thickness
rather than the surface of glass. Our simulations show that there is a competi-
tion between transformation in glass due to highly compressive stresses which occur
upon wave convergence, and fracture due to tensile stresses which occur afterwards
(we model this fracture using 3D simulations). We believe that the design of high
pressure experiments on glass can ultimately lead to new high pressure applications
utilizing it (e.g. ballistics).
4.1 Surface Acoustic Wave Experiments
Here we study experiments on glass in which surface acoustic waves are generated
using concentrated laser pulses (detailed in References [33] and [34]). In these ex-
periments, a ring shaped laser pulse is applied to the surface of a cylindrical glass
73

Probe pulse M wror400 nm, 180 fs Seem
Camerae Left
Lens Reference Excitation pulseMinor focus Focusing SAW
Gold ring SAW
MotorizedLens
stage SwpLens
Excitation pulse Axc
800 nm, 300 ps Adinmr
(a) Optical setup for surface shocks (b) Glass samples used in experiments
Figure 4-1: Experimental setup and glass samples for surface acoustic wave experi-
ments. The experimental setup contained a conical prism and lens used to focus a
laser pulse on engraved gold rings deposited on the samples, generating surface waves.
Convergence of the surface waves leads to high pressures in the samples. A reference
mirror and high speed camera allowed for imaging of the surface waves over time.
sample in order to generate focusing and diverging stress waves in the material. The
convergence of the focusing stress waves results in large pressures at the center of the
sample. We simulate these experiments to determine if these large pressures are high
enough to cause transformation in glass. Multiple surface wave experiments were
conducted, each at a different laser excitation pulse energy (the applied laser pulse
energies were 0.15, 0.25, 0.5, 0.75 and 1.00 mJ).
The setup for this experiment is shown in Figure 4-la. Cylindrical glass samples of
radius and thickness 300 prm (shown in Figure 4-1b) were fabricated by the Xin Zhang
Group in Boston University, and contained deposited gold rings of radius 100 Am.
To generate surface acoustic waves in the glass sample, a laser excitation pulse was
focused into a ring using a conical prism and lens combination [33]. The ring shaped
laser pulse was applied to the region of the sample containing the engraved gold ring,
resulting in ablation of the gold and the formation of focusing and diverging surface
acoustic waves. These waves traveled through the surface of the sample, with the
focusing wave generating large amounts of pressure in the sample upon converging
to its center. Figure 4-2 shows a snapshot of the surface of the glass sample at a
time of t = 21.3 ns after the laser pulse was applied. Here we observe the focusing
74
-.

and diverging waves generated by ablation of the gold ring. The snapshot contains
fringe patterns (depicted by the distorted white lines), which may be used to infer
the surface displacement of the sample at the time of imaging.
A afion area
Figure 4-2: Focusing and diverging surface acoustic waves (SAWs) resulting from theablation of the gold coating in glass samples. The red dashed circle shows the regionwhere the gold ring was ablated. The white lines are fringe patterns which can beused to infer the surface displacement of the sample at a given time. High pressuresare achieved in the sample when the focusing SAW converges to the center.
Fringe patterns were captured at multiple times in a given experiment using a
high speed camera. Figure 4-3 illustrates fringe patterns captured at various times
in one such experiment. The first image shows the sample at t = 16 ns, and each
subsequent image is taken every 3 ns afterwards. We observe that the focusing wave
travels closer to the center over time, eventually converging at time t = 31 ns and
causing highly compressive pressures here. Afterwards, the surface wave begins to
diverge, resulting in tensile stresses at the center.
The schematic in Figure 4-4 captures the essential aspects of the experiment. It
shows the laser excitation ring of radius 100 prm which is applied to a glass sample
of thickness and radius 300 pm, generating diverging and focusing surface waves
through the sample. To model this experiment, one could perform a three dimensional
simulation of the boundary value problem (BVP) represented in Figure 4-4. However,
the sample has axial symmetry due to its cylindrical shape, enabling us to model a two
dimensional slice of the sample using axisymmetric finite elements (assuming no 3D
75

Figure 4-3: Interferometric images of propagating surface acoustic waves shown at
various times. The focusing shock wave converges at t = 31 ns, leading to large
pressures. The wave diverges thereafter, causing tensile stresses in the sample lead-
ing to brittle fracture. Fringe Patterns in the images can be used to infer surface
displacements at the time of imaging.
76

Focusing surface shock Laser excitation ring
Diverging surface shock
0 JlO 4 tl
Figure 4-4: 3D schematic of Glass Sample and surface shock wave setup. The laserexcitation ring is applied at the location of the gold ring on the sample, generatingfocusing and diverging surface shock waves.
effects such as fracture or anisotropy are present). The axisymmetric analysis results
in a 2D problem that is computationally less expensive than the full 3D problem. The
problem setup for the 2D axisymmetric model is shown in Figure 4-5. In this model,
the left side corresponds to the center of the actual sample. This side is constrained
from horizontal motion due to symmetry. The bottom and right side (corresponding
to the outer edge of the sample) are free to move. While our setup contains no vertical
constraints and permits vertical rigid body translations, this is not an issue as we are
only interested in the sample behavior at the very early stages of wave propagation
before notable rigid body translations can occur. Lastly, the top of the sample is
traction free except for the region where the laser excitation pulse is applied. The
laser pulse transduced onto the gold ring is assumed to have a Gaussian spatial profile
in the experiments. Accordingly, we model the load caused by the gold ablation due
to the laser as a Gaussian force distribution. This force distribution is represented by
Equation 4.1, and is applied for an short time of t = 300 ps in the experiments.
f(r) = A x exp d(r2 R) (4.1)
Equation 4.1 gives the downward pressure f(r) acting on a point at a distance r from
the center of the sample. In Equation 4.1, R = 100 pm and represents the location
77

T100y
R = 300 pm -
Figure 4-5: Profile of glass sample modeled using axisymmetric finite elements. Thelaser excitation pulse is modeled as a Gaussian force distribution.
of the center of the pulse, d = 5 pm and is a length scale defining its width, and A
represents the amplitude of the Gaussian force distribution. The amplitude of the
Gaussian is unknown in each experiment; only the applied laser energy is known.
Since the Gaussian amplitude is an input to our model (and not the laser energy),
we must infer a relationship between the two. To determine this relationship, we
calibrated our amplitude in the simulation to each experiment, ensuring that the
predicted wave behavior (amplitude, speed, shape) matched those in the experiments
(determined using fringe patterns).
The inelastic model for glass was used in our simulations. The material properties
of the glass used in the experiments were po = 2510 kg/m 3, K = 72 GPa and
G = 30.1 GPa, so these values were also used in our simulations. These were run
for a time span of T E [0,40] ns (so that the convergence and divergence behavior
of the surface waves was captured). Additionally, we employed artificial viscosity
in our simulations, as is customary with problems involving shocks. The artificial
viscosity parameters were adjusted to avoid oscillations, with parameters of ci =
78

1.0 and CL = 0.05 selected here. Third order axisymmetric finite elements were
used in the mesh to accurately capture wave propagation occurring in the sample.
Lastly, the Gaussian amplitude was tuned as described earlier, so that a good match
between experimental and simulation surface displacement profiles was obtained for
each laser energy. Comparisons of the surface displacements in the experiments and
the simulations (tuned to agree with experiments as closely as possible) are shown
below for the laser energies of 0.15, 0.25, 0.5, and 0.75 mJ.
T- 121- T- 'KaA
0 0 -I
Dfrtd. a,: fr,- (frm)
(a) t = 12.7 ns
0 0 20 'a a 20 30 .0 so0 W 0 M
(c) t = 21.3 ns
'GooDigt o [o (tm)
(e) t = 30.7 ns
II
Oittfom fom O~ (M)
(b) t 17.1 ns
W M0 W N .0 M 20 W 0 W 20 0 0 W 0 MWDistooo from (moo (tmn)
(d) t 26.2 nsT 3- 3 u
.. 1/
-, 0 N0 So 0 30 20 W a W N 0 JQ 4o YO oDi()t=m rom f.1 (m)
(f) t = 35.1 ns
0
-W To N M a W0 20 W0 0 20 M .0 M doDistance from fom (tom)
(g) t = 39.7 ns
Figure 4-6: Comparison of numerical and experimental out-of-plane displacements at
various times during surface wave convergence, for a laser energy of 0.15 mJ.
Figures 4-6 through 4-9 show the out-of-plane displacement of the surface of the
sample from the experiment and our simulations at several different times. Each set of
figures corresponds to a different laser energy. The simulation surface displacements
79
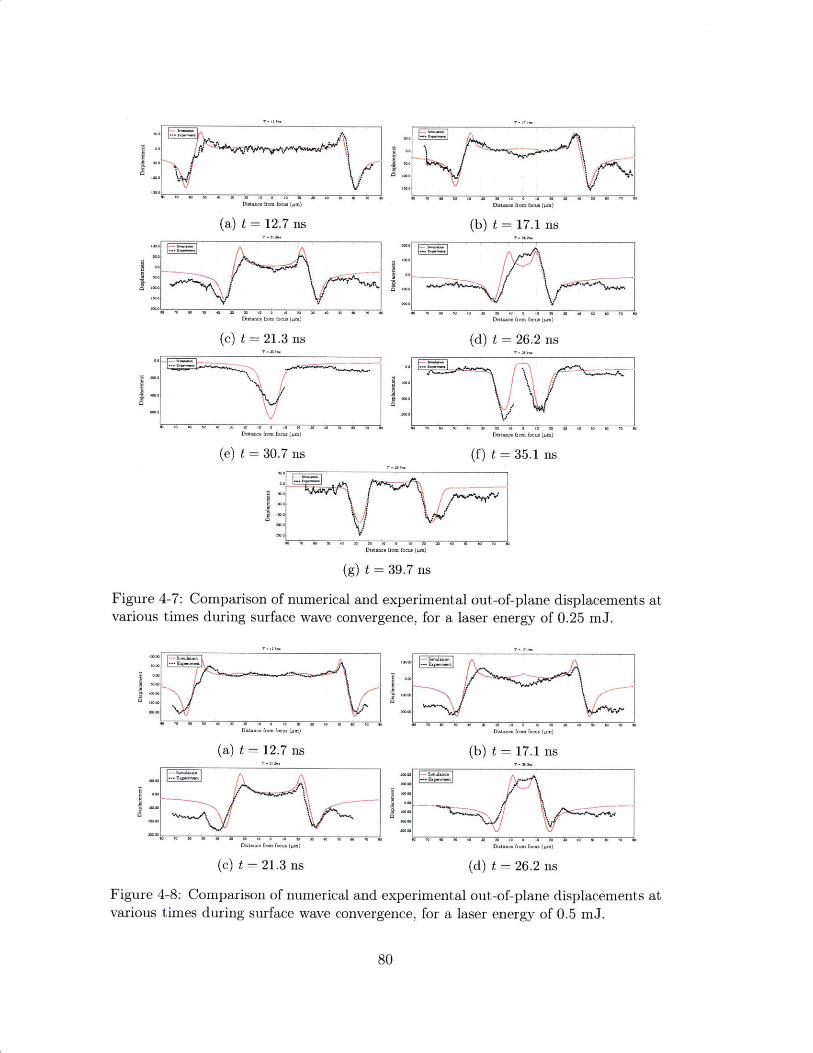
a -.ma loaDurfce fom. focus (tAm)
(a) t = 12.7 ns
N W .0 30 20 17 . 20 s NDistmnce from focus (mm)
(b) t = 17.1 ns
-o "I A.
I .
'V I -a,
X 0 a W - X .0 .m TO N
Distnce fzom focus (AM)
(c) t 21.3 ns
Wad
Dist( e &om focus (tM)
(e) t = 30.7 ns
Disto. fom. focus (m)
(d) t = 26.2 ns
.-aao en so a D, oo to ot to. (tot) o so to aDistn = om focus (pm)
(f) t = 35.1 ns
E,9
No
no-Distnce fomm ocus (pm)
(g) t = 39.7 ns
Figure 4-7: Comparison of numerical and experimental out-of-plane displacements atvarious times during surface wave convergence, for a laser energy of 0.25 mJ.
am am
'Wo
MO
(a) t = 12.7 ns
Dist..c. from focus (AM)
(b) t = 17.1 ns
Woo10100 .s2000_
N TO W W o a o. o tWto M)Dist-c from facus (jum)
(c) t = 21.3 ns
Disttco fhom focus (gm)
(d) t = 26.2 ns
Figure 4-8: Comparison of numerical and experimental out-of-plane displacements atvarious times during surface wave convergence, for a laser energy of 0.5 mJ.
80
"it-c from focus (JAM)
-
-
so 0 .0 N 4

(a)00 2 =127 () = 7.1<00 200 N 0
oLwm from f-0 (pmo) Di.~Diso 0 0 W a) ( 0002M)
(a) t =12.7 ns (b) t 17.1 ns
IN
DW~~0, &-oo f-oo (AI)
(c) t = 21.3 ns
Figure 4-9: Comparison of numerical and experimental out-of-plane displacements atvarious times during surface wave convergence, for a laser energy of 0.75 mJ.
at negative x-positions are obtained by reflecting the results about the x = 0 position.
We observe a satisfactory match between surface amplitudes for each laser energy,
justifying our correlation between experiment and simulation parameters.
From the calibration process, we determined that amplitudes of 15, 20, 32, 39
and 40 GPa could be correlated to laser energies of 0.15 mJ, 0.25 mJ, 0.5 mJ, 0.75
mJ and 1.00 mJ, respectively. We plot this relationship between laser energy and
the Gaussian amplitude, shown in Figure 4-10. We observe a roughly linear trend
between the amplitude and Gaussian pulse for lower laser energies. The amplitude
appears to saturate for higher laser energies. However, more data from higher energies
cases (1.25 mJ or 1.50 mJ) should be obtained to verify this behavior. In [91, Fabbro
et al. discuss an analytical method to determine this relationship between amplitude
and applied laser energy. This approach is based on the actual physical processes
occurring during laser irradiation. However, our tuning approach (comparing surface
displacements) is expected to give the same relationship between amplitude and laser
energy, so we are not interested in the finer details of the processes discussed in the
paper.
Overall, our inelastic model for glass is able to capture the surface displacements
observed in the experiments. Furthermore, we have established a correlation between
laser energy and Gaussian amplitude, allowing us to use our simulations to analyze
81

Correllation Between Gaussian Amplitude and Laser Energy
35
3D
E Z5.. ... .
20-
15101 0.2 0.3 0.4 0.5 0.5 0.7 0.8 0.9 1.0
Laser Ewergy (mj)
Figure 4-10: Correlation obtained between applied laser energy and Gaussian am-plitude. There is a roughly linear trend between the amplitude and laser energy.However, this tapers off between 0.75 mJ and 1 mJ.
the pressures experienced by the glass sample for given laser energies. As a repre-
sentative case, we perform a simulation with a Gaussian amplitude of A = 15 GPa
(corresponding to the lowest energy case of 0.15 mJ), and illustrate pressure contours
in the sample at several times, shown in Figure 4-11.
In Figure 4-11, we focus on the upper left of the sample to illustrate the behavior
of the waves generated by the Gaussian pulse. Pressure contours (computed as p =
-}(tr(a)) are shown, where the red contours correspond to compression and the blue
contours correspond to tension. We observe interesting wave propagation phenomena
from the simulations, most notably the formation of two waves (a primary wave and
a surface wave).
The sequence of events in the images depicted in Figure 4-11 is described below.
At time t = 1 ns, the laser excitation pulse has been applied to the surface of the
sample. This results in a single wave containing compressive, tensile, and compressive
components as shown at t = 5 ns. This wave then divides into a primary wave (known
as a P-wave) and a surface acoustic (or Rayleigh) wave. The two waves are visible at
t = 15 s. The P-wave travels through the entire depth of the sample and propagates
82

I
i
(a) t = 1 ns (b) t =5 ns
(c) t = 15 ns (d) t = 17 ns
j
(e) t = 20 ns
i
(f) t = 23 ns
i
(g) t = 30 ns (h) t = 32 ns
Figure 4-11: Snapshots of the pressure contours in the glass sample at various times
for 0.15 mJ case (A = 15 GPa). A P-wave and surface acoustic wave are generated bythe Gaussian force distribution. These waves travel at different speeds and convergecausing large tensile and compressive pressures at the center.
83
I
I

much faster than the Rayleigh wave, which travels only along the surface. The P-
wave converges to the center first, resulting in compressive pressures at the center at
t = 17 ns. The P-wave then diverges, becoming a tensile wave (shown at t = 20 ns)
which crosses the tensile component of the incoming Rayleigh wave, augmenting the
strength of this Rayleigh wave at t = 23 ns. The Rayleigh wave then converges to
the center, resulting in tensile followed by compressive pressures at the center (at
t = 30 ns and t = 32 ns respectively). Afterwards, tensile stresses occur at the center
once again as the surface wave diverges outward (not shown). We note that the
highest pressures are observed at the center of the sample when the Rayleigh wave
converges (approximately t = 32 ns).
To further validate our model, we compare the speed of the P-wave and Rayleigh
waves observed in the simulations to analytical results. The speed of P-waves and
Rayleigh waves in a material are both dependent on material constants. Expressions
for these speeds are given in Equations 4.2 and 4.3 [161.
VP= F-:G (4.2)po
G 0.7+112v
Vr _ (0.87= +-1 (4.3)p0 1+ V
In Equations 4.2 and 4.3, K, G, po and v represent the bulk modulus, shear modulus,
density and Poisson's ratio, respectively, of the material through which the wave is
traveling. For our glass, these material parameters were approximately K = 72 GPa,
G = 30.1 GPa, and po = 2510 kg/m 3 (v can be determined from K and G as roughly
0.317). Substituting these values into Equations 4.2 and 4.3 gives an expected P-wave
velocity of 6.68 km/sec and Rayleigh wave velocity of 3.22 km/s.
To estimate the P-wave and Rayleigh-wave velocities in our simulations, we first
determine the positions of the two waves at every nanosecond. This is done by finding
the locations on the surface where pressure changes sign (one location corresponds to
the P-wave, the other to the Rayleigh wave). Based on these locations, we determine
the distance traveled by the waves from one nanosecond to the next. Dividing distance
84
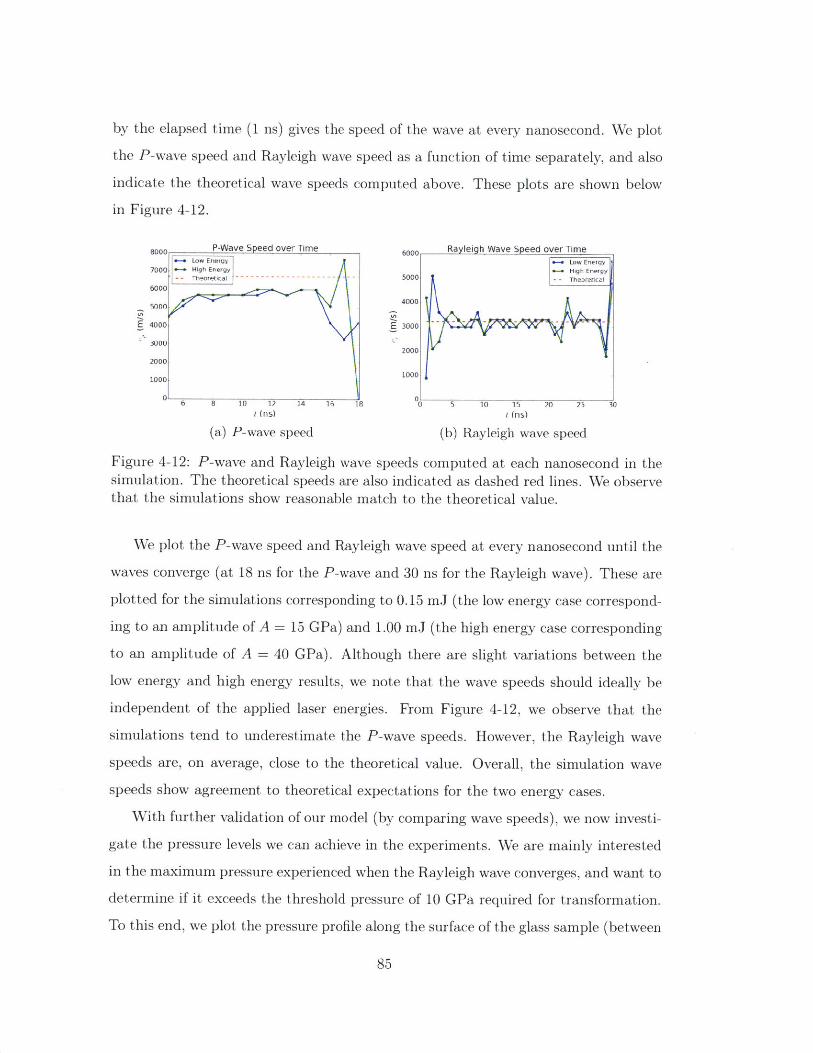
by the elapsed time (1 ns) gives the speed of the wave at every nanosecond. We plot
the P-wave speed and Rayleigh wave speed as a function of time separately, and also
indicate the theoretical wave speeds computed above. These plots are shown below
in Figure 4-12.
8000 P-Wave Speed over Time 6000 Rayleigh Wave Speed over Time
- LW Eer- Low Energy
7000 - gh'E.a y -------- -------------------- -- - 50006000
40005000
E4ooo E 3000
20002000
10001000
6 8 10 12 14 16 1 is 0 5 10 15 20 25 30Oi(s) t (ns)
(a) P-wave speed (b) Rayleigh wave speed
Figure 4-12: P-wave and Rayleigh wave speeds computed at each nanosecond in thesimulation. The theoretical speeds are also indicated as dashed red lines. We observethat the simulations show reasonable match to the theoretical value.
We plot the P-wave speed and Rayleigh wave speed at every nanosecond until the
waves converge (at 18 ns for the P-wave and 30 ns for the Rayleigh wave). These are
plotted for the simulations corresponding to 0.15 mJ (the low energy case correspond-
ing to an amplitude of A = 15 GPa) and 1.00 mJ (the high energy case corresponding
to an amplitude of A = 40 GPa). Although there are slight variations between the
low energy and high energy results, we note that the wave speeds should ideally be
independent of the applied laser energies. From Figure 4-12, we observe that the
simulations tend to underestimate the P-wave speeds. However, the Rayleigh wave
speeds are, on average, close to the theoretical value. Overall, the simulation wave
speeds show agreement to theoretical expectations for the two energy cases.
With further validation of our model (by comparing wave speeds), we now investi-
gate the pressure levels we can achieve in the experiments. We are mainly interested
in the maximum pressure experienced when the Rayleigh wave converges, and want to
determine if it exceeds the threshold pressure of 10 GPa required for transformation.
To this end, we plot the pressure profile along the surface of the glass sample (between
85

0-50 pm) when the Rayleigh wave converges. Figure 4-13 shows the pressure profile
for two laser energies of 0.25 mJ (A = 20 GPa) and 1.00 mJ (A = 40 GPa). We find
that the peak pressure achieved in the 0.25 mJ case is only 6 GPa, so applying this
laser energy will not induce any transformation in glass. However, the 1.00 mJ case
illustrates a peak pressure of approximately 12 GPa, so an experiment run with a
1.00 mJ laser energy has the potential to cause transformation in glass.
14 Pressure Profile during Surface Wave Convergence
12
10
CL
2-
0-
a-2
0 10 20 30 40 50Position from Center (pm)
Figure 4-13: Pressure Profile on surface of glass sample during convergence of Rayleighwave, shown for simulations corresponding to 0.25 mJ and 1.00 mJ experiments. Thepeak pressure achieved are 6 GPa and 12 GPa respectively, showing that the 1.00 mJexperiments have the potential to cause transformation. Fracture effects will likelymitigate transformation.
The high energy case has the potential to cause transformation in glass. However,
only a small portion of the glass sample close to the center experiences a pressure
above 10 GPa required for transformation. Furthermore, the convergence of the
Rayleigh wave actually causes high tensile pressures prior to the compressive pressures
which cause transformation. These tensile pressures have the capability to cause
fracture, which may mitigate the high pressures predicted by our simulations (which
do not incorporate fracture). We explore the role of fracture in the next section.
86
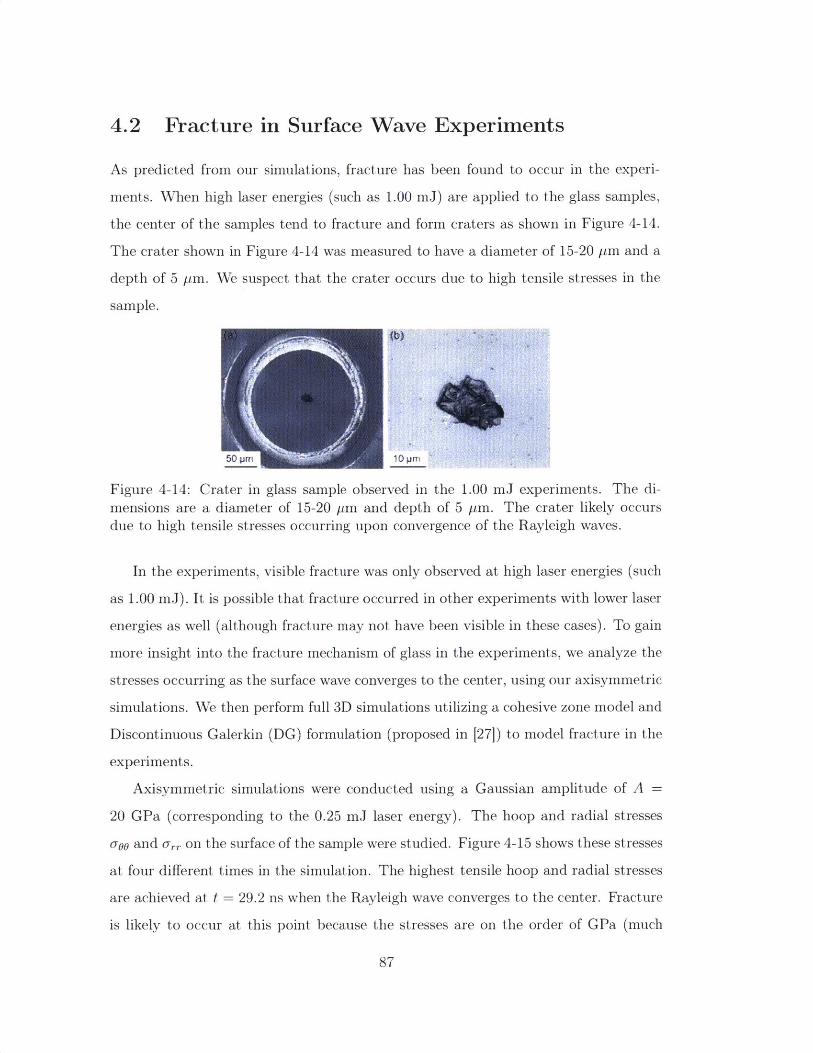
4.2 Fracture in Surface Wave Experiments
As predicted from our simulations, fracture has been found to occur in the experi-
ments. When high laser energies (such as 1.00 mJ) are applied to the glass samples,
the center of the samples tend to fracture and form craters as shown in Figure 4-14.
The crater shown in Figure 4-14 was measured to have a diameter of 15-20 Pm and a
depth of 5 pm. We suspect that the crater occurs due to high tensile stresses in the
sample.
50pr 10 PM
Figure 4-14: Crater in glass sample observed in the 1.00 mJ experiments. The di-mensions are a diameter of 15-20 pjm and depth of 5 pm. The crater likely occursdue to high tensile stresses occurring upon convergence of the Rayleigh waves.
In the experiments, visible fracture was only observed at high laser energies (such
as 1.00 mJ). It is possible that fracture occurred in other experiments with lower laser
energies as well (although fracture may not have been visible in these cases). To gain
more insight into the fracture mechanism of glass in the experiments, we analyze the
stresses occurring as the surface wave converges to the center, using our axisymmetric
simulations. We then perform full 3D simulations utilizing a cohesive zone model and
Discontinuous Galerkin (DG) formulation (proposed in [271) to model fracture in the
experiments.
Axisymmetric simulations were conducted using a Gaussian amplitude of A
20 GPa (corresponding to the 0.25 mJ laser energy). The hoop and radial stresses
a00 and o-,, on the surface of the sample were studied. Figure 4-15 shows these stresses
at four different times in the simulation. The highest tensile hoop and radial stresses
are achieved at t = 29.2 ns when the Rayleigh wave converges to the center. Fracture
is likely to occur at this point because the stresses are on the order of GPa (much
87
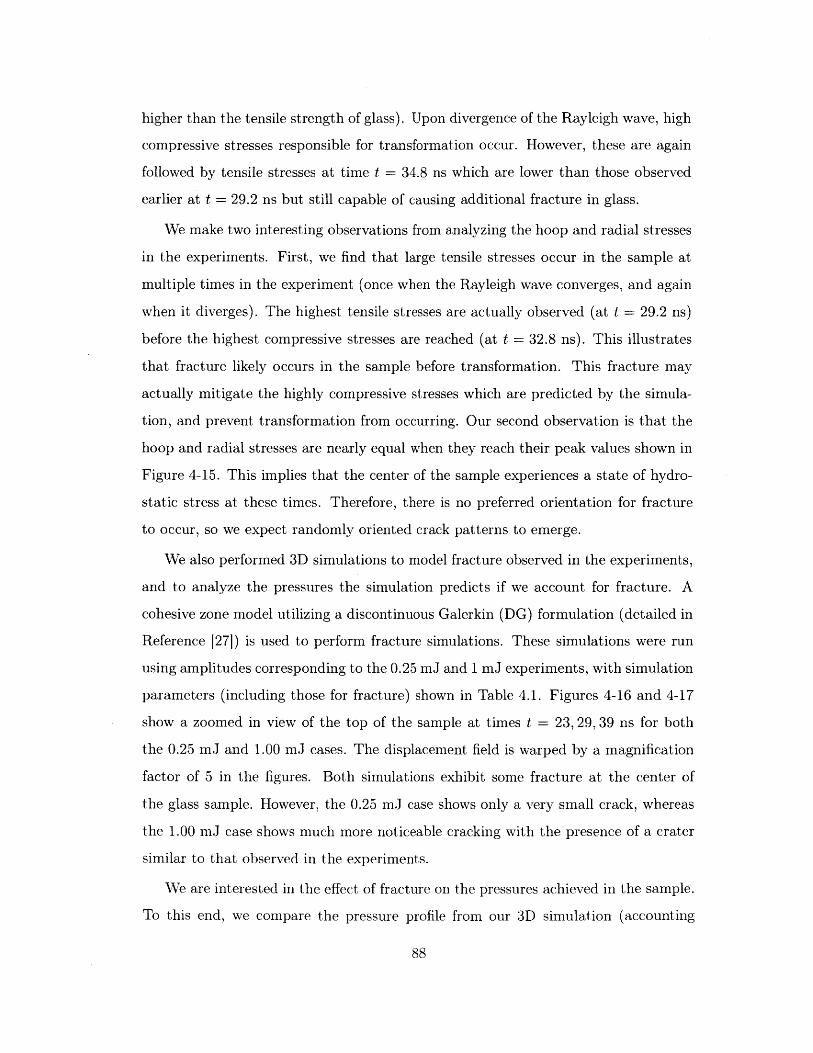
higher than the tensile strength of glass). Upon divergence of the Rayleigh wave, high
compressive stresses responsible for transformation occur. However, these are again
followed by tensile stresses at time t = 34.8 ns which are lower than those observed
earlier at t = 29.2 ns but still capable of causing additional fracture in glass.
We make two interesting observations from analyzing the hoop and radial stresses
in the experiments. First, we find that large tensile stresses occur in the sample at
multiple times in the experiment (once when the Rayleigh wave converges, and again
when it diverges). The highest tensile stresses are actually observed (at t = 29.2 ns)
before the highest compressive stresses are reached (at t = 32.8 ns). This illustrates
that fracture likely occurs in the sample before transformation. This fracture may
actually mitigate the highly compressive stresses which are predicted by the simula-
tion, and prevent transformation from occurring. Our second observation is that the
hoop and radial stresses are nearly equal when they reach their peak values shown in
Figure 4-15. This implies that the center of the sample experiences a state of hydro-
static stress at these times. Therefore, there is no preferred orientation for fracture
to occur, so we expect randomly oriented crack patterns to emerge.
We also performed 3D simulations to model fracture observed in the experiments,
and to analyze the pressures the simulation predicts if we account for fracture. A
cohesive zone model utilizing a discontinuous Galerkin (DG) formulation (detailed in
Reference [27]) is used to perform fracture simulations. These simulations were run
using amplitudes corresponding to the 0.25 mJ and 1 mJ experiments, with simulation
parameters (including those for fracture) shown in Table 4.1. Figures 4-16 and 4-17
show a zoomed in view of the top of the sample at times t = 23,29, 39 ns for both
the 0.25 mJ and 1.00 mJ cases. The displacement field is warped by a magnification
factor of 5 in the figures. Both simulations exhibit some fracture at the center of
the glass sample. However, the 0.25 mJ case shows only a very small crack, whereas
the 1.00 mJ case shows much more noticeable cracking with the presence of a crater
similar to that observed in the experiments.
We are interested in the effect of fracture on the pressures achieved in the sample.
To this end, we compare the pressure profile from our 3D simulation (accounting
88

SS
0 20 60 W0 so 10
(a) Radial/Hoop Stress contours att = 10.0 ns
2SS
Hopg and Maglal Stress rftUtes at t -29.2 te
-U'
(b) Radial/Hoop Stress contours att = 29.2 ns
i
S
10 Hoop and Sadial Stress Promes at t = 32 _ ns
0
-5 -
- 2 W W0 W
(c) Radial/Hoop Stress contours att = 32.8 ns
10 Hoop and Radial Stress Prolies at t = 34.8 ns
5
-S
0 ~ 4 28 V Wtistrce hor Radhn lam$
(d) Radial/Hoop Stress contours att = 34.8 ns
Figure 4-15: Hoop and Radial stress profiles during Rayleigh wave convergence anddivergence. High tensile stresses are observed at the center of the glass sample be-fore the high compressive pressures necessary for transformation. Thus, we suspectfracture will occur and prevent pressures necessary for transformation from beingachieved.
89
Hopandieafl Stmes Pvo~ks 0t t -0 we
A
-5

Table 4.1: Material properties used for simulation of fracture
(a) t 23 ns (b) t = 29 ns (c) t 39 ns
Figure 4-16: Fracture patterns in glass substrate caused by the convergence of asurface acoustic wave generated by laser energy of = 0.25 mJ
(a) t 23 ns (b) t 29 ns (c) t 39 ns
Figure 4-17: Fracture patterns in glass substrate caused by the convergence of asurface acoustic wave generated by laser energy of = 1.00 mJ
90
Properties ValuesDensity p = 2510 kg/m3
Bulk Modulus K = 72 GPaShear Modulus G = 30.1 GPaCohesive strength o-c = 1.OGPaFracture energy Ge = 200Tension/Shear weighting -y = 1.0DG stability parameter # = 1.0

for fracture) to that from the corresponding axisymmetric case for the 1.00 mJ case.
Figure 4-18 illustrates the peak pressures achieved from the axisymmetric simulation
which does not account for fracture (the pressure profile is reflected about x = 0 in
this case) and the 3D simulation with fracture. We observe that the predicted peak
1Comparison of Pressure Prufille with and without Fracture- Without Fracture- With Fracture
-40 -20 0 20 40Position from Center (pm)
Figure 4-18: Pressure Profile on surface of glass sample during convergence of Rayleighwave, from 3D simulations with fracture and axisymmetric simulations without frac-ture. The predicted peak pressure is not high enough to cause transformation whenfracture is accounted for.
pressure is much lower when fracture is modeled. In this case, the peak pressure is
only about 2 GPa, as opposed to the 12 GPa value predicted in the axisymmetric
case. Physically, fracture occurs in order alleviate the high tensile stresses experienced
in the glass sample. However, it also prevents the compressive pressures achieved
when the surface wave converges from being high enough for transformation. Thus,
we find that fracture wins out in this competition, and prevents us from achieving
transformation in glass.
We conclude that the surface acoustic wave experiments are not suitable for caus-
ing glass transformation. This is because the pressures achieved are generally not high
enough to exceed the threshold of 10 GPa required for transformation. Although the
1.00 mJ experiment did have the potential to induce glass transformation, fracture
91

actually occurs before these high pressures can be reached. Fracture reduces the peak
pressures we can achieve in the experiments, and mitigates transformation in the glass
samples.
In the next section, we explore a new experimental design which can more easily
generate large compressive stresses in glass.
4.3 Exploring Converging Shock Waves
In this section, we explore an alternative experimental configuration to generate high
pressures in glass. The idea of this new setup is to apply a laser pulse to the body of
a cylindrical glass sample, rather than to its surface, in order to generate shock waves
that will travel through the bulk of the sample. The convergence of these "bulk"
shock waves can generate pressures larger than those achieved with surface waves,
which tend to disperse and lose strength during propagation. A schematic for this
new configuration (shown in the axisymmetric view) is shown in Figure 4-19.
sapphire(~10OPm)
glass
sapphire -(-300pm) polymer
Figure 4-19: An axisymmetric view of the experimental setup for generating shockwaves through the bulk of the glass sample. A laser (depicted by arrows in the figure)is applied to a polymer host, generating a shock wave in the material. The wavepropagates to the glass and eventually converges, resulting in very high pressures atthe center.
In this setup, the glass sample is attached to a polymer host, and the polymer
glass substrate is glued in between two sapphire plates. A laser excitation pulse is
92
-A--____ ____

applied to the circumference of the polymer, resulting in a shock wave. This shock
wave transduces from the polymer into the glass sample, and eventually converges to
the center, resulting in high pressures here. Waves are generated through the entire
bulk of the sample, rather than just the surface as in the previous experiments, giving
the configuration the potential to provide higher pressures.
Our goal, as before, was to model the experiment in order to determine the pres-
sures achievable in this new experimental configuration. The BVP setup for perform-
ing finite element simulations of the converging shock wave experiment is shown in
Figure 4-20, depicted in both the axisymmetric (left) and three dimensional (right)
modes. Both schematics illustrate a glass sample of thickness t and radius R con-
strained from vertical motion on the top and bottom (representing the plates pre-
venting out of plane motion in the experiments). The polymer material itself was
not modeled in our finite element setup. Instead, we model only the glass sample
and the transduction of the shock wave from the polymer to the glass. This is mod-
eled as a uniform piston velocity applied on the outer edge of the sample (as shown
in. the schematic) for a very short time (this transduction time is unknown in the
experiments).
UtI t
(a) Axisymmetric Numerical Setup (b) 3D Numerical Setup
Figure 4-20: Axisymmetric and 3D Setup for BVP representing converging shock
wave experiment.
An axisymmetric and corresponding 3D simulation was performed to illustrate
93
-A

wave propagation behavior in this experiment. As a representative case, we choose an
arbitrary a piston velocity of Up = 1000 m/s applied for a short time of t = 1 ns. The
dimensions of the samples used for our simulations were t = 5QPm and R = 50Pm.
The inelastic model for glass is used for these simulations with the same material
parameters given in Table 2.4 (except that the friction angle was set to 4 = 71.50 -
this prevents yielding in shear).
Snapshots of the pressure contours in the glass sample, in the axisymmetric and
corresponding 3D views, are shown in Figure 4-21. A compressive shock wave is
generated at time t = 1 ns and begins to travel through the glass sample. The shock
converges to the center at t = 8 ns. At this point, the highest or peak pressure is
experienced by the sample. After convergence the wave diverges outward, causing
large tensile stresses. We are primarily interested in pressure achieved in the sample
when the shock wave converges to the center. This is because this converging pressure
is the largest pressure experienced by the sample, and the most likely to cause phase
transformation.
From the representative simulation, we observe that compressive pressure occurs
before tensile pressure (unlike in the previous experiment). Therefore, we expect that
the material will transform before fracture happens. Since we are mainly interested
in transformation behavior, there is no need to model fracture. For this reason, we
perform axisymmetric simulations in the remainder of our study.
We perform simulations to determine the adequacy of these experiments for gen-
erating high pressures. No experimental data was available for this configuration, so
we could not develop a correlation between applied laser energy and piston velocity.
As a result, we apply arbitrary piston velocities of Up = 500, 1000,1500, 2000 and ob-
serve the pressures achieved in these cases as a first step. The pressure profile when
the peak pressure is achieved at the center is shown for each piston velocity in Figure
4-22. We also plot the expected density profile along the radius of the glass sample
after the shock converges in Figure 4-23.
Figure 4-22 illustrates that extremely high peak pressures can be achieved using
this setup. A piston velocity of Up = 500 m/s results in a peak pressure of about. 10
94

(a) Axisymmetric View at t = 1 ns
(c) Axisymmetric View at t = 5 ns
(e) Axisymmetric View at t = 8 ns
(g) Axisymmetric View at t = 10 ns
(d) 3D View at t = 5 ns
(f) 3D View at t = 8 ns
(h) 3D View at t = 10 ns
Figure 4-21: Axisymmetric and 3D Views of Converging Shock Waves in Glass at
various times. The shock wave travels through the material and converges at the
center, resulting in the highest compressive pressures (in red) experienced by the
sample throughout the simulation (at approximately at 8 ns). The wave then diverges
outwards at t = 10 ns causing tensile stresses (in blue) in the sample.
95
(b) 3D View at t = 1 ns
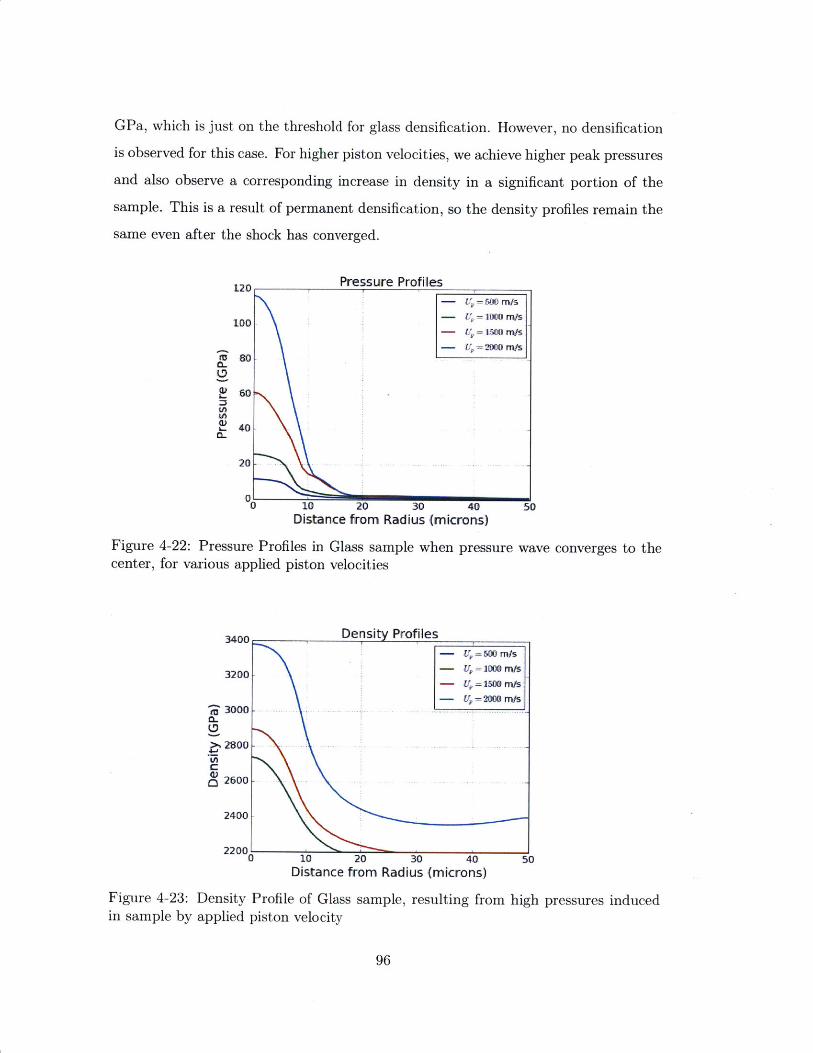
GPa, which is just on the threshold for glass densification. However, no densification
is observed for this case. For higher piston velocities, we achieve higher peak pressures
and also observe a corresponding increase in density in a significant portion of the
sample. This is a result of permanent densification, so the density profiles remain the
same even after the shock has converged.
120
'100
to0~I.,
U,U,
60
40
20
Pressure Profiles
0 10 20 30 40Distance from Radius (microns)
Figure 4-22: Pressure Profiles in Glass sample when pressurecenter, for various applied piston velocities
50
wave converges to the
Density Profiles
3200
3000
2800
S2600
2400
2200 10 20 30 40 50
Distance from Radius (microns)
Figure 4-23: Density Profile of Glass sample, resulting from high pressures inducedin sample by applied piston velocity
96
- U-=. MI
- u =loco nm/s2' = oMISU,=-" S
01
- T.5W m/s
- U.1500 m/s
- U = 2"3 m/s.. ....-. ...
"WL;
0
I

Overall, our initial simulations illustrate that this configuration has the potential
to cause transformation in glass. Furthermore, this experimental setup avoids the pre-
transformation fracture which occurs in the initially studied configuration. To more
accurately predict the pressures that we may achieve in this setup, we must develop
a correlation between laser energy and our applied piston velocity, which requires
experimental data from this setup. Nevertheless, this configuration is promising for
achieving glass transformation due to extreme loading.
4.4 Summary
In this Chapter, we explore two experimental configurations for initiating transforma-
tion in glass. We first study experiments where laser induced surface acoustic waves
are used to produce high pressures upon wave convergence. However, we observe
competing effects of transformation and fracture. High tensile stresses occur in the
samples prior to compressive stresses, causing the samples to break and preventing
significant compressive stresses necessary for transformation from occurring. In the
second configuration, shock waves are generated through the entire body of the sam-
ple rather than just the surface. This setup takes advantage of a converging setup,
which is found to provide very high pressures necessary for transformation. The
problem of fracture occurring prior to transformation is avoided here. As a next step,
one could determine correlations between experimental and simulation parameters,
and perform parameter studies with the intent of developing a design for maximizing
pressure. Such a design would allow for the study of glass under extreme conditions.
97

98

Chapter 5
Conclusion
5.1 Summary
The development of glass-based ballistic protection systems can be aided by simu-
lation tools utilizing accurate constitutive models. In this thesis, we have presented
several constitutive models developed to capture the high pressure response of glass
including during its densification process.
Our initial model was based on an equation of state for glass which gives its
volumetric response in the low density and high density regimes. A polynomial fit
connecting the low density and high density behavior was used to model the response
in the densification regime. This augmented equation of state was coupled with a
Neohookean model for shear to provide a full description of the stress tensor. How-
ever, at this point the model was purely elastic and unable to capture permanent
densification effects. Therefore, we introduced an internal variable known as the de-
gree of transformation to track densification progress. Given the current density and
degree of transformation, we could determine the unloading path and model increase
in density upon unloading from high pressures. This model introduced plasticity
in an ad-hoc manner and did not incorporate full 3D tensorial plasticity. Our final
model was an improvement which combined the volumetric behavior described by the
equation of state with important features of the Camclay volumetric plasticity model.
A yield condition based on pressure and shear and a flow rule permitting permanent
99

volumetric deformation were key ingredients which allowed us to model the effect of
shear and a severe degree of permanent densification. The model showed satisfactory
agreement to pressure-density data available in the literature and can represent up
to 77% relative densification as predicted by Sato [28] after high pressure loading.
For verification, we tested our constitutive models under shock conditions. We
performed finite element simulation of an idealized piston. Shock waves were gener-
ated in a constrained bar by applying a piston velocity at one end, and an artificial
viscosity formulation presented in f181 was employed to remove spurious oscillations
in the shock waves arising from the problem. The pressures and densities upstream
and downstream of the shock wave were measured for several piston velocities, and
found to agree to theoretically expected values obtained using the Rankine-Hugoniot
jump conditions.
Lastly, the constitutive models were used to study the efficacy of two experimental
configurations for generating high pressures, and ultimately transformation, in glass.
In the first configuration, surface acoustic waves were generated in cylindrical glass
samples via lasers. The convergence of these surface acoustic waves were hypothe-
sized to cause transformation in glass. To simulate these experiments, a correlation
was established between applied laser energy and the amplitude of the Gaussian force
distribution (an input to our simulations) resulting from laser application. Our simu-
lations illustrated propagation of two types of waves in the samples: a primary wave
(P-wave) and surface wave. We found that the P-waves traveled much faster than
the surface waves, and that divergence of the P-waves caused large tensile stresses
which would fracture experimental samples. Furthermore, the P-waves would diverge
before the surface waves could converge to the center and cause large compressive
pressures and transformation. Thus, we found that the fracture actually mitigated
the compressive pressures that could be achieved, and so this experimental setup was
inadequate for causing transformation.
In the second configuration, we conceived an experiment in which a laser is shined
on the outer surface of a cylindrical glass sample to generate uniaxial radial converging
waves through the thickness. The simulations illustrated that this configuration could
100

generate pressures required for glass transformation. Furthermore, any tensile stresses
capable of causing fracture would only occur after transformation had occurred. To
verify that this model is adequate for causing transformation, we need to obtain
experimental data to correlate the experiments to the simulations.
As a next step, we could improve the constitutive models developed in this work.
Some feasible improvements are given in the next section.
5.2 Model Improvements
Here we outline several improvements that can be made to our constitutive models.
" Effect of shear: Shear has been found to facilitate permanent densification in
glass [19j. To improve our model, we can develop a more accurate condition
for the onset of glass densification based on pressure and shear. Such a yield
criterion has been developed by Molnar et al. [23], who perform MD simulations
to determine combinations of pressure and shear which cause onset of glass
densification, and uses this data to construct a yield condition for densification.
They propose an elliptical yield surface (similar to that in our inelastic model)
which eventually evolves into a Drucker-Prager type surface as densification
progresses. We could adopt a similar yield criterion for our glass model, so that
the yield behavior incorporates data molecular dynamics. Experimental data
could also be incorporated to improve the description of yielding.
" Temperature: High temperature is also found to facilitate transformation in
glass [19, 13]. In this work, we neglect thermal effects. In the future, we may add
temperature as an input parameter which affects the volumetric deformation
behavior, as well as relative densification achieved in glass at a given pressure
loading. We may take advantage of the data collected in high temperature
studies on glass (such as in [13]) to aid our temperature modeling efforts.
" Densification: The model could be further refined by calibrating our pressure-
densification behavior (shown in Figure 2-11) to experimental data on relative
101

densification achieved from unloading at different pressures (as obtained by
Wakabayashi et al. in [35])
Incorporating the improvements listed above to our inelastic model for glass would
yield a more comprehensive glass model accounting for thermal and shear effects on
glass densification. Such a model can inspire new experimental configurations for
triggering phase transformation in glass, which in turn can provide experimental data
informing the constitutive models. This combined protocol in which simulations and
experiments guide each other can improve our understanding of glass densification
and lead to improved models. A better understanding of the behavior of glass under
extreme conditions, coupled with improved models which accurately describe this
behavior, can promote the design of effective glass-based protection systems.
102

Appendix A
Derivation of Rankine-Hugoniot
Jump Conditions
The Rankine-Hugoniot jump conditions are statements of the conservation of mass,
momentum and energy, in the presence of a shock wave as shown in Figure A-1. The
conservation of mass, momentum, and energy are given by
- Mass poU, = p(U, - Up)
- Momentum P - Po = pOUUp
- Energy E-EO = 1(P+Po)(Vo- V)
We prove these relations below, using the shock front in Figure A-1 as the center of
reference. The derivation presented here is based on [22].
UsPP E Po Po EO
Figure A-1: Shock Wave separating shocked and unshocked regions. There is a jumpin the thermodynamic state variables across the shock, which are related via theRankine-Hugoniot Jump Conditions.
103
Up

1. Mass The conservation of mass principle states that the mass moving towards
the shock front must be equal to the mass moving away from the shock. Thus,
it is true that
Mass in = Mass Out (A.1)
Ap(Us - Up)dt = Apo Usdt (A.2)
poU, = p(U -U) (A.3)
2. Momentum The conservation of momentum states that the change in mo-
mentum is equal to the impulse caused by the applied forces. Thus, it is true
that
Impulse = A Momentum (A.4)
(P - Po)Adt = Ap(U, - Up)Updt (A.5)
P - Po = p(U - up)up (A.6)
From conservation of mass, it is true that p(U, - Up) = poU, so that
P - P0 = poUsU, (A.7)
3. Energy The conservation of energy states that the work done by applied forces
is equal to the difference in total energy between the two sides of the shock
front. The work done by the applied forces is given as
AW = (PA)(Updt) - (P0 A)(0) = (PA)(Updt) (A.8)
while the change in the total energy is given by
AE = - pA(Us - Up)dt] U2 + EAp(U, - Up)dt - EoApoUndt (A.9)
104

Equating AW and AE, we obtain
AW = AE (A.10)
Pup [ p(Us - Up)1 U,2 - Eopo(U.) + Ep(U - Up) (A.11)
Applying conservation of mass stating that p(U, - Up) = poUs
= - Eo poUs + EpoUs (A.12)
PU, = Ipo UsU + po U,(E - Eo) (A.13)
Solving for E - EO gives
E - EO Pup 1 UsU (A.14)poUs 2 po Us
Applying conservation of momentum stating that Up = PO and substituting
for U,P(P-Po) 1 (P-Po)2E -Eo = P 0 8 2U202(A. 15)
p0 Us2 2 pgUs2
Combining conservation of mass and momentum
(PO - p)US = -pUp = - - PO) (A.16)Po U ,
1pOU -p(P - Po - ) (A.17)
Given that = V we have
P-P 0p2 Us = - (A.18)
VO - V
Substituting this into Equation A.15, we have
V 0 - V I (PPo) 2 pE - Eo = P(P - Po)- -0(2 -- V) (A.19)
P -PO 2 P- PO
105

or alternatively,
E - = (P + Po)(V - V) (A.20)2
106
Appendix B
Variational Formulation of Camclay
Theory of Plasticity
Here we present a variational formulation of the Camelay Theory for Granular Plas-
ticity developed by Ortiz and Pandolfi in [24] (more details can be found in the
reference). Our implementation of the inelastic model for glass is based heavily on
this formulation. For a more thorough review of the Camclay theory, one can refer
to [30].
B.1 Governing Equations
We begin by assuming a multiplicative decomposition of the deformation gradient F
into an elastic part F' and a plastic part FP as follows
F = FFp
The free energy is assumed to be of the form
A(F, FP, T, q) = We(Fe, T) + WP(T, q, FP)
107

where We is the elastic strain energy density, WP is the stored energy of cold work,
T is the temperature, and q represents a set of appropriate internal variables. Due to
material-frame indifference, We should only depend on F' by the elastic right-Cauchy
Green deformation tensor Ce
Ce = FeTFe = FP-TCFPl
so that the frame indifferent free energy has the appropriate arguments
A(F, FP, T, q) = We (Ce, T) + WP(T, q, FP) (B.1)
The elastic strain energy density We is assumed to be decoupled into volumetric and
deviatoric components We,"' and Wedev as follows:
we (Ce, T) = We'vol(Je, T) + We'dev(Ce'dev, T) (B.2)
where We,vol and Wedev are given by
K TT1we'Vol(Je, T) = -[log Je - 3a(T - T) 2 PoT -log T2 +PTO (
Wedev = [tee 2 (B.4)
In Equations B.3 and B.4, je is the Jacobian of the elastic deformation, K is the
isothermal bulk modulus, a is the thermal expansion coefficient, T and To the cur-
rent and reference absolute temperature respectively, po the mass density per unit
undeformed volume, Cv the specific heat per unit mass (constant volume), and [t the
shear modulus. The equation of state resulting from We,vol is
p = K(Oe - 3a(T - To)) (B.5)
108

and define the logarithmic elastic strain as
e 1E log(C )
2(B.6)
The stored energy WP is a function of the effective plastic strain JP and the volumetric
plastic strain OP = log JP so that
A(F, FP, T, EP) = We(Ce, T) + WP(T, EP, OP) (B.7)
The flow rule is assumed to be of the form
FPFP-' = eM, cP > 0 (B.8)
where iP is the effective plastic strain rate and M is the direction of plastic flow
satisfying the following kinematic constraint
1 ' .-+ (Mde- Mde=
a 3(B.9)
with Mdev being the deviatoric part of M and a defined as an internal friction coeffi-
cient. We assume linear rate-sensitivity and accordingly define a dual kinetic potential
as follows
* ( p)22
(B.10)
where j is a viscosity constant.
B.1.1 Update Algorithm
The flow rule given by Equation B.8 may be discretized in time as
FP+1 =exp(AePM)FP
0"1= ACP(trM)O%
(B.11)
(B.12)
109

The problem is solved incrementally by formulating the following incremental energy
function
fn(Fn+1, Tn+1; E-n+1, M) = We(Fe + 1, Tn+1 ) + WP(Tn+1, e6+i, 0+1) + At* (A /At)
(B.13)
and defining an effective work of deformation by minimizing fA with respect to En+1
and M
Wa (Fn+1 , Tn+)= min fn(Fn+1,Tn+1;+ 1 , M)c+1M
(B.14)
subject to the kinematic constraint in Equation B.9 and the plastic irreversibility
constraint
AEP = ePn+i - er > 0 (B.15)
One can show that Wn is a potential for the first Piola-Kirchoff stress tensor Pn+1
OWnPn+1 = 0Y+ (Fn+1, Tn+1) (B.16)
Furthermore, the consistent tangent moduli is given by
DPn+1 = 2 (Fn+l, Tn+l)o9Fn+1i9Fn+1
(B.17)
B.1.2 Implementation based on logarithmic elastic strains
The incremental work of deformation can be written in the form below if we ex-
press the strain energy density in terms of logarithmic elastic strain and consider the
discretized flow rule B.11
fn= W (log[exp(-Ae/M)C*('eP/'L )PM)], Tn+l}+WP(Tn+1, En+1 n+1)+Ato. (AE
(B.18)
the predictor elastic right Cauchy-Green tensor is defined as
Cn 'Pre = FP-T C+FP-1 (B.19)
110

We assume commutativity of plastic flow direction M with elastic predictor as follows
MCi =e C ,re M (B.20)
The following identity holds under these conditions
log[exp(-AePM)C e,re exp(-AEPM)] = log(C 'P'e) -pMrM (B.21)
From the kinematic constraint in Equation B.9 and the above definition we have
Ap = 12(AP)2 + 2AeP -AeP (B.22)
where the deviatoric part of the incremental plastic strain is
AeP = AEpdev - Ap - 1AGpj3
(B.23)
The incremental relations for plastic strains
E P+1 = E + AEO
OPn+ = OPn + AOP
(B.24)
(B.25)
may be inserted into the incremental work of deformation to give the following
fn(F.+1 , Tn+1 ; AcP) = e+1're - , Tn+1) + WP(Ta+1, 6+D+1) + Atn1*(AeP/At)
(B.26)
where the elastic predictor strain is given by
1Ce'pre = log(C''),n+1 -2 lo(C+1?
111
(B.27)

The incremental work of deformation may be optimized with respect to the incre-
mental plastic strain, resulting in the following Euler-Lagrange equations
-crn+l + [Uo(C+1, O1+) + 2*' (AP/At)][API + e]/A + Po(epn+ 1 , On+1)I = 0
(B.28)
where the critical uniaxial stress and pressure are given by
aWP
PWPPO = 00
and the conjugate stress tensor to the logarithmic elastic strain is given by
aWe17 K I + 2p-ee
ae,yre
The stress tensor un+1 is given by
Tn+l = K(Onlf - AOP)I + 2p(en',' AeP)
and can also be separated into its volumetric and deviatoric components
Pn+1 = K(Oe'pe - AOP) pn'r+1 KAOP
2pre - AeP) =rl- 2pAeP
(B.29)
(B.30)
(B.31)
(B.32)
(B.33)
(B.34)
(B.35)
where
dev 1s = adev = 0 - -(trM)I3
(B.36)
Decomposing the Euler-Lagrange Equation B.28 into volumetric and deviatoric com-
ponents results in
,/ I AOP-p'li + KAOP + PO,n+i + (0O7,n+i + )__ = 0
a_ 2 0~(B.37)
112

-spre 1 + 2pAeP + (uo,,+1 + 2* ) = 0n+ 3 AEP
Taking the norm of the deviatoric equation gives
pre 2 1 2 AeP - AePqn+)2 = (3pAEP + CO7,n+l + * 2 A Ep2
where
(qr+e)2 = 3pre . Sp+q~ sl2 +1 n7l~
Inserting Equations B.37 and B.39 into the constraint given in Equation B.22 results
in the following identity
( pre 2
n+1
3pdtEP + (-0,n+1 + ?P*'+ (Ky71 - P,n+1? 2
(a2KAEP + u-o,,+1 + ip*')
which is satisfied under the following conditions
+1pre - (3tAc + O-O,n+ + 0*') COS (B.42)
Ppe1 = PO,n+i + [aKAEP + (uo,n+1 + 0*')/a] sin # (B.43)
The system of equations B.43 can be solved using Newton-Raphson iteration. This
requires a linearization of the equations to the following form
dqp+71 = CjidEp 1 + C1 2d$
dP'+n1 = C21den+1 + C22 d4
(B.44)
(B.45)
113
(B.38)
(B.39)
(B.40)
= 1 (B.41)

where the constants C11, C12, C21 and C22 are given below
C1 = (3p + + HE,n+I + aHeo,n+1 sin # cos#
(B.46)
C12 = aHeo,n+ 1 AEP cos 2 # - (3pAEP + 0,n+i+ )*') sin 0
(B.47)
C21= HoE,n+1 + (aK + + cfHoo,n+laAt
1+ -He,n+I + HeO,n+i sin sin #
(B.48)
C22 = (aHoo,n+iAEP + Heo,n+1 AEP sin 0 + IaKAEP + +a(-0n1 + *)Cos
(B.49)
and the hardening moduli are defined as
Hoo9 09Po - a 2 Wp (OP, EP)
0Po - 2W OP P)&6 P 0OP19eP
Ho- 0 (OP EP)
0 P0P 'OO
00p0 02WP
H OE (OP, & O )P9o-o _ 2 W P, P
(B.50)
(B.51)
(B.52)
(B.53)
(B.54)
B.1.3 Yield Criterion
The yield criterion for the Camclay model is obtained by setting AcE equal to zero
in Equation B.41, giving
2 _ 2 02 (B.55)
The elliptical yield surface corresponding to Equation B.55 is shown below. The
internal friction parameter a is related to the friction angle # as follows.
6 tan 4a =
3 - tan5(B.56)
114

The internal friction parameter is also depicted in the yield surface in Figure B-1.
PC P P
Figure B-1: Yield Surface of the Camclay Model
We omit details regarding the consolidation and hardening behavior of soils in the
Camclay theory, but one can look to Reference [30] for more details on these aspects
of the model.
115

116

Appendix C
Time Integration Procedure for
Inelastic Model for Glass
An algorithm for the time-integration of the inelastic model for glass is given in this
Appendix.
C.1 Time-Integration Procedure
The time integration procedure for the glass model is as follows:
Given: FP and Fn+1
Calculate: O-n+1, Fp+,
Step 1 Calculate the predictor elastic deformation gradient
(C.1)
Step 2 Compute the right Cauchy-Green tensor and the predictor logarithmic strain
C epr= F efre Fi( e~n+1 n+1 n+1
Ce~pre = log (C e)
(C.2)
(C.3)
117
Fn+1 = n+1FK1

Step 3 Calculate the predictor deviatoric and volumetric components of the stress
tensor:
sn+1 = o+dev - 2,ep*
Ka
k1Ka p - K
kn+ p- - i]
(Po a
\POa)- ]1 [i - tanh X In ( )
\ Po
(C.4)
(C.5)
Step 4 Calculate the yield function or overstress (based on the current stress state)
as
f (p, q) = q2 + a2(pP) - .2 (C.6)
where
P = Pn+1
q = 'j s. where s = sn+12:
Po = PO,n+1 = -0En+1
19WPq0 = qo,n+i = -
wsn+1
where the incremental stored energy function is
(C.7)
(C.8)
(C.9)
(C.10)
1Wn+1 = Wnp + 2 [W(On+1 ) - Wcg(On)I -
(C.12)We(OP) = op pedOP = pref,,f coshJ ( ref
Step 5 Determine whether stress state corresponds to the elastic or plastic regime
1. If f < 0 -* Elastic
7n+1 sn+i + Pn+I and we are DONE
2. Else -+ Plastic Perform a Newton-Raphson iteration to solve Equations C.13
118
with
(C.11)-Wf'( n+1)AE-P

and C.14 for AcP and V/*' (and follow Steps 6-9)
q Pre (3pAEc + o-o,n+l + 0*') cos
Pf+7I = PO,n+1 + [aKAcP + (O-on+ 1 + l*')/a] sin #
(C.13)
(C.14)
Step 6 Update FP using the exponential map
FP = exp(AtD$+1)Fp (C.15)
where DPn+1 is the direction of plastic flow.
Step 7 Update the plastic jacobian and relative densification parameter
JP = det(Fn+1 ) (C.16)
(C.17)1)
Step 8 Compute final pressure in glass as a weighted average of the low and high
density glass EoS
Pn+I = (v/1 - 2AP)pilo eos + (1 - 2 AP)Phigh eos
Step 9 The .final Cauchy stress tensor is given by
I-~n+1= Sn+1 + Pn+1I
rb
119
(C.18)
(C.19)
AP = I-

120

Bibliography
[1] C.S. Alexander et al. "Changes to the shock response of fused quartz due to
glass modification". In: International Journal of Impact Engineering 35 (2008),
pp. 1376-1385. DOI: 10. 1016/j .ijimpeng.2008.07.019.
[2] J.R. Asay and M. Shahinpoor. High-Pressure Shock Compression of Solids. New
York: Springer-Verlag, 1993.
[31 B. Aydelotte and B. Shuster. "A Computational Study of the ARL Glass Model
and its Predictions of Ballistic Penetration and Fracture Conoid Development".
In: 28th International Symposium on Ballistics. Atlanta, Geogia, USA, Sept.
2014.
[4] R. Becker. Steps Toward Glass-Specific Models in Parallel Design Codes. Tech.
rep. Herndon, VA: ARL, May 2010.
[5] P.W. Bridgman and I. Simon. "Effects of Very High Pressures on Glass". In:
Journal of Applied Physics 24 (1953), pp. 405 -413. DOI: 10.1063/1.1721294.
[6] E.B. Christiansen, S.S. Kistler, and W.B. Gogarty. "Irreversible Compressibility
of Silica Glass as a Means of Determining the Distribution of Force in High-
Pressure Cells". In: Journal of the American Ceramic Society 45 (1962), pp. 172
-177. DOI: 10.1111/j.1151-2916.1962.tbllll5.x.
[7] R.J. Clifton, M. Mello, and N.S. Brar. "Effect of shear on failure waves in
soda lime glass". In: AIP Conference Proceedings 429 (1998), pp. 521-524. DOI:
10.1063/1.55558.
121

[8] H.M. Cohen and R. Roy. "Effects of Ultra high Pressures on Glass". In: Journal
of the American Ceramic Society 44 (1961), pp. 523 -524. DOI: 10. 1111/j .
1151-2916.1961.tb13717.x.
[9] R. Fabbro et al. "Physical study of laser-produced plasma in confined geometry".
In: Journal of Applied Physics 68.2 (1990), pp. 775-784. DOI: 10 . 1063/1 .
346783. eprint: https: //doi . org/10. 1063/1.346783. URL: https: //doi.
org/10.1063/1.346783.
[101 Thomas Fronk. "Accelerated computational modeling of ballistic helmet test
protocols". MA thesis. Massachusetts Institute of Technology, 2016. URL: http:
//hdl.handle.net/1721.1/108930.
[11] A.G. Gazonas et al. Multiscale Modeling of Non-crystalline Ceramics (Glass).
Technical Report 0765. US Army Research Laboratory, 201.
[12] M. Grujicic et al. "The effect of high-pressure densification on ballistic pen-
etration resistance of a soda-lime glass". In: Journal of Materials Design and
Applications Part L (2011), pp. 298-315. DOI: 10.1177/1464420711412849.
[13] M. Guerette et al. "Structure and Properties of Silica Glass Densified in Cold
Compression and Hot Compression". In: Scientific Reports 5 (2015), pp. 1-10.
DOI: 10. 1038/srep15343.
[141 T.J. Holmquist and G.R. Johnson. "A Computational Constitutive Model for
Glass Subjected to Large Strains, High Strain Rates, and High Pressures". In:
Journal of Applied Mechanics 78 (2011), pp. 1-9. DOI: 10.1115/1.4004326.
[15] V. Keryvin et al. "Constitutive modeling of the densification process in silica
glass under hydrostatic compression". In: Acta Materialia 62 (2014), pp. 250-
257. DOI: 10.1016/j .actamat.2013.07.067.
[16] H. Kolsky. Stress Waves in Solids. Dover Publications, 1963.
[17] J.C. Lambropoulos, S. Xu, and T. Fang. "Constitutive Law for the Densification
of Fused Silica, with Applications in Polishing and Microgrinding". In: Journal
122

of the American Ceramic Society 79 (1996), pp. 1441-1452. DOI: 10. 1111/j .
1151-2916.1996.tb08748.x.
[18] A. Lew, R. Radovitzky, and M. Ortiz. "An artificial-viscosity method for the
lagrangian analysis of shocks in solids with strength on unstructured, arbitrary-
order tetrahedral meshes". In: Journal of Computer-Aided Materials Design 8.2-
3 (2001), pp. 213-231. DOI: 10. 1023/A: 1020064403005.
[19] J.D. Mackenzie. "High-Pressure Effects on Oxide Glasses: I, Densification in
Rigid State". In: Journal of the American Ceramic Society 46 (1963), pp. 461
-470. DOI: 10.1111/j.1151-2916.1963.tb13776.x.
[20] S.P. Marsh. LASL Shock Hugoniot Data. University of California Press, 1980.
[21] R.G. McQueen, J.N. Fritz, and S.P. Marsh. "On the Equation of State of
Stishovite". In: Journal of Geophysical Research 68 (1963), pp. 2319-2322. DOI:
10.1029/JZ068i008p02319.
[22] M.A. Meyers. Dynamic behavior of materials. Wiley Interscience, 1994.
[23] G. Molnar et al. "Densification dependent yield criteria for sodium silicate
glasses - An atomistic simulation approach". In: Acta Materialia 111 (2016),
pp. 129-137. DOI: 10.1016/j.actamat.2016.03.053.
[24] M. Ortiz and A. Pandolfi. "A variational Cam-clay theory of plasticity". In:
Computer Methods in Applied Mechanics and Engineering 193 (2004), pp. 2645-
2666. DOI: 10 . 1016 / j . cma . 2003 . 08 . 008. URL: http : / / linkinghub .
elsevier.com/retrieve/pii/SO045782504000817.
[25] Ortiz, M. and Pandolfi, A. "A variational Cam-clay theory of plasticity". In:
Computer Methods in Applied Mechanics and Engineering 193 (2004), pp. 2645-
2666. DOI: 10. 1016/j . cma.2003.08.008. URL: file: ///tmp/literature/
2003-cmame-pandolfi.pdf.
[26] A. Polian and M. Grimsditch. "Room-temperature densification of a-SiO 2 versus
pressure". In: Physical Review B 41 (1990), pp. 6086-6089. DOI: 10 . 1103 /
PhysRevB.41.6086.
123

[27] R. Radovitzky et al. "A scalable 3D fracture and fragmentation algorithm based
on a hybrid, discontinuous Galerkin, Cohesive Element Method". In: Computer
Methods in Applied Mechanics and Engineering 200 (2011), pp. 326-344. DOI:
10. 1016/j .cma.2010.08.014.
[28] T. Sato and N. Funamori. "Sixfold-Coordinated Amorphous Polymorph of SiO 2
under High Pressure". In: Physical Review Letters 101 (2008), pp. 1-4. DOI:
10.1103/PhysRevLett.101.255502.
[29] W. Schill et al. "The anomalous yield behavior of fused silica glass". In: Journal
of the Mechanics and Physics of Solids 113 (2018), pp. 105-125. DOI: 10. 1016/
j .jmps.2018.01.004.
[30] A. Schofield and P. Wroth. Critical State Soil Mechanics. London: McGraw-Hill,
1968.
[311 S. Sundaram and R.J. Clifton. "Flow behavior of soda-lime glass at high pres-
sures and high shear rates". In: A IP Conference Proceedings 429 (1998), pp. 517-
520. DOI: 10.1063/1.55556.
[32] S. Susman et al. "Intermediate-range order in permanently densified vitreous
SiO 2 : A neutron-diffraction and molecular dynamics study". In: Journal of the
American Ceramic Society 46 (1963), pp. 461 -470. DOI: 10. 1103/PhysRevB.
43.1194.
[33] D. Veysset. "Real-Time Observations of Materials under Dynamic Loading Con-
ditions at the Micron Scale". PhD thesis. MIT, 2016. URL: http: //hdl. handle.
net/1721. 1/104573.
[34] D. Veysset et al. "Acoustical breakdown of materials by focusing of laser-
generated Rayleigh surface waves". In: Applied Physics Letters 111 (2017),
pp. 1-4. DOI: 10 . 1063/1.4993586.
[35] D. Wakabayashi. "Compression behavior of densified a-Si0 2 glass". In: Physical
Review B 84 (2011), pp. 1-6. DOI: 10.1063/1. 1777192.
124
[361 L.V. Woodcock, C.A. Angell, and P. Cheeseman. "Molecular dynamics studies of
the vitreous state: Simple ionic systems and silica". In: The Journal of Chemical
Physics 65 (1976), pp. 1565-1577. DOI: 10.1063/1.433213.
[37] A. Yokoyama et al. "Elastic wave velocities of silica glass at high temperatures
and high pressures". In: Journal of Applied Physics 107 (2010), pp. 1-5. DOI:
10.1063/1.3452382.
[38] C. Zha et al. "Acoustic velocities and refractive index of Si-0 2 glass to 57.5 GPa
by Brillouin scattering". In: Physical Review B Condensed Matter 50 (1994),
pp. 105-112. DOI: 10. 1103/PhysRevB. 50.13105.
125




















