PRODUKSI OBAT ASMA SEDUH BERBASIS ...
100
TUGAS AKHIR PRODUKSI OBAT ASMA SEDUH BERBASIS MIKROKONTROLER ATmega8535 Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar SarjanaTeknik Program Studi Teknik Elektro Oleh: METODIUS DANNY CHRISTIAN MANALU NIM : 085114010 PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS SAINS DAN TEKNOLOGI UNIVERSITAS SANATA DHARMA YOGYAKARTA 2013 i PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
-
Upload
khangminh22 -
Category
Documents
-
view
2 -
download
0
Transcript of PRODUKSI OBAT ASMA SEDUH BERBASIS ...

TUGAS AKHIR
PRODUKSI OBAT ASMA SEDUH BERBASIS
MIKROKONTROLER ATmega8535
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar SarjanaTeknik
Program Studi Teknik Elektro
Oleh:
METODIUS DANNY CHRISTIAN MANALU
NIM : 085114010
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2013
i
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

FINAL PROJECT
BREWED ASTHMA MEDICINE PRODUCTION
BASED OF MICROCONTROLLER
ATmega8535
Presented as Partial Fullfillment of Requirements
To Obtain the SarjanaTeknik Degree
In Electrical Engineering Study Program
METODIUS DANNY CHRISTIAN MANALU
NIM : 085114010
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2013
ii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

iii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

iv
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

v
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO
Hari ini harus lebih baik dari hari kemarin, tetapi hari esok
adalah harapan
Dengan ini kupersembahkan karyaku untuk.....
Yesus Kristus Pembimbingku yang setia,
Keluargaku tercinta,
Teman-teman seperjuanganku,
Kekasihku tercinta,
Dan semua orang yang mengasihiku
Terima Kasih untuk
semuanya.......
vi
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

vii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

INTISARI
Kebiasaan masyarakat dalam membuat obat asma dengan cara diseduh, sering kali
terkendala oleh waktu. Teknologi serba otomatis pada masa kini sangat cepat berkembang
di masyarakat. Salah satu pengembangan fungsi teknologi otomatis adalah produksi obat
asma seduh berbasis mikrokontroler ATmega8535. Alat seduh otomatis ini memberikan
solusi agar masyarakat dimudahkan dalam pembuatan obat seduh tanpa memakan waktu
lama.
Produksi obat asma seduh berbasis mikrokontroler ATmega8535 menggunakan
blender sebagai pemotong yang dikendalikan oleh mikrokontroler AVR ATmega8535, dua
buah heater dan sensor LM35 untuk mendeteksi suhu pada pengeringan dengan suhu yang
diukur adalah 60°C dan pemanas air dengan suhu yang diukur adalah 100°C. Kemudian
mikrokontroler akan mengaktifkan motor servo untuk membuka kran jika suhu air telah
mencapai 100°C. Setelah itu air akan keluar menuju gelas.
Alat produksi obat asma seduh berbasis mikrokontroler ATmega8535 sudah
berhasil dibuat dan dapat bekerja dengan baik, dengan waktu pemotongan akar senggugu
hingga mencapai halus adalah 5 menit. Kenaikan tegangan terhadap suhu per derajatnya
adalah 9,9mV dengan error 1% untuk pengeringan dan 10,1mV dengan error 1% untuk
pemanas air.
Kata kunci : obat asma, akar senggugu, sensor LM35, ATmega8535
viii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

ABSTRACT
People’s habit in making asthma medicines by brewed, often have problem in
time allocation. Automatic technology today has been so quickly developed. One of them
was brewed asthma medicine production based of microcontroller ATmega 8535. This
automatic brewing instrument was offered as solution for brewing medicine in shorter
time.
Brewed asthma medicine production based of microcontroller ATmega8535
using blender as the controlled cutter, two heaters, and LM35 sensor to detect drying heat
(600C) and water heaters heat (1000C) . Then microcontroller will activate servo motor to
open tap if water’s heat reach 1000C. Then water will spill out to reserved cup.
Brewed asthma medicine production based of microcontroller ATmega8535 was
well created and capable to operate as well, with senggugu roots cutting time till became
soft was 5 minutes. Heat increases against volt per degree was 9,9 mV with 1% error for
drying and 10,1 mV with 1% error for water heating.
Keyword : asthma medicine, senggugu roots, LM35 sensor, ATmega8535
ix
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

x
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
DAFTAR ISI
HALAMAN JUDUL ................................................................................................ i
HALAMAN PERSETUJUAN ............................................................................. iii
HALAMAN PENGESAHAN ............................................................................... iv
PERNYATAAN KEASLIAN KARYA ............................................................. v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP............................. vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA
ILMIAH UNTUK KEPENTINGAN AKADEMIS ...................................... vii
INTISARI .................................................................................................................... viii
ABSTRACT ................................................................................................................ ix
KATA PENGANTAR ............................................................................................. x
DAFTAR ISI .............................................................................................................. xi
DAFTAR GAMBAR ............................................................................................... xiv
DAFTAR TABEL..................................................................................................... xvii
DAFTAR LAMPIRAN…………………………………………………………….xvii
BAB I PENDAHULUAN 1.1. Latar Belakang .................................................................................................. 1
1.2. Tujuan dan Manfaat .......................................................................................... 2
1.3. Batasan Masalah ............................................................................................... 2
1.4. Metodologi Penelitian ...................................................................................... 3
BAB II DASAR TEORI 2.1. Tanaman Senggugu ( Clerodendron serratum ) ............................................... 5
2.2. Mikrokontroler AVR ........................................................................................ 6
2.2.1. Konfigurasi pin ........................................................ …………………. 7
2.2.2. Peta Memori .............................................................. …………………. 8
2.2.3. Stack Pointer ............................................................. …………………. 8
2.2.4. Phase Correct PWM Mode ......................................... …………………. 9
xi
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

2.2.5. Interupsi .................................................................... …………………. 10
2.2.6. Reset Dan Osilator Eksternal ................................... …………………. 11
2.2.7. Osilator Mikrokontroler .......................................... …………………. 11
2.2.8. Analog to Digital Converter .................................... …………………. 12
2.2.9. Timer/Counter 0 ...................................................... …………………. 13
2.2.10. Register Pengendali Timer/Counter 0 ................... …………………. 14
2.2.11. Driver ..................................................................... …………………. 17
2.3 LCD .................................................................................................................. 18
2.4. Sensor LM35 .................................................................................................... 20
2.5. Motor DC .......................................................................................................... 21
2.6. Relay .................................................................................................................. 22
2.7. Limit Switch ...................................................................................................... 24
BAB III PERANCANGAN 3.1. Diagram Blok Sistem .......................................................... …………………. 25
3.2. Perancangan Hardware ........................................................ …………………. 26
3.3. Hardware Mekanik ........................................................................................... 27
3.4. Hardware Elektronika ....................................................................................... 27
3.4.1. Minimum Sistem ATmega8535 ................................ …………………. 28
3.4.2. Driver Motor ............................................................. …………………. 30
3.4.3. Sensor LM35 ............................................................. …………………. 32
3.4.4. Rangkaian Penampil ( LCD) ..................................... …………………. 33
3.4.5. Perancangan Relay ..................................................... …………………. 35
3.5. Perancangan Perangkat Lunak.......................................................................... 36
3.5.1. Flowchart Utama……………………………………………………..... 36
3.5.2. Flowchart Pemotongan.............................................. …………………. 36
3.5.3. Flowchart Pengeringan dan Penyeduhan .................. …………………. 37
BAB IV HASIL DAN PEMBAHASAN 4.1. Hasil Implementasi Alat ................................................................................... 39
4.2. Pengujian Keberhasilan Sistem ........................................................................ 43
4.2.1. Pengujian Pemotongan Akar Senggugu Dengan 5 Variasi Waktu.……. 43
4.2.2. Pengujian Pada Proses Pengeringan .......................... …………………. 44
xii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

4.2.3. Pengujian Pada Proses Pemanas air........................... …………………. 48
4.3. Pengujian Rangkaian Relay ................................................. …………………. 52
4.4. Pengujian Rangkaian Driver ............................................... …………………. 53
4.5. Pengujian Rangkaian Penyearah 6 Volt ........................................................... 54
4.6. Pembahasan Software ....................................................................................... 54
4.6.1. Program utama ........................................................... …………………. 54
4.6.2. Program pemotongan ................................................. …………………. 55
4.6.3. Program pengaturan motor DC ................................. …………………. 56
4.6.4. Program pengeringan dan pemanas air ...................... …………………. 59
4.6.5. Program pergerakan kran air ..................................... …………………. 61
BAB V KESIMPULAN DAN SARAN 5.1. Kesimpulan ....................................................................................................... 62
5.2. Saran ................................................................................................................. 62
DAFTAR PUSTAKA .............................................................................................. 62
LAMPIRAN ............................................................................................................... 64
xiii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

DAFTAR GAMBAR
Halaman
Gambar 1.1. Blok Model Perancangan ......................................................................... 3
Gambar 2.1. Tanaman Senggugu ................................................................................. 5
Gambar 2.2. Konfigurasi pin ........................................................................................ 7
Gambar 2.3. Peta memori program .............................................................................. 8
Gambar 2.4. Pulsa phase correct PWM ....................................................................... 9
Gambar 2.5. Rangkaian reset ....................................................................................... 11
Gambar 2.6. IC driver L298 ......................................................................................... 17
Gambar 2.7. LCD 2x16 ................................................................................................ 18
Gambar 2.8. LM35 ....................................................................................................... 20
Gambar 2.9. Konstruksi motor DC.................................................................................. 21
Gambar 2.10. Relay ........................................................................................................ 22
Gambar 2.11. Prinsip kerja relay .................................................................................... 22
Gambar 2.12. Konfigurasi transistor sebagai saklar ....................................................... 23
Gambar 2.13. Simbol dan bentuk limit switch................................................................ 24
Gambar 2.14. Konstruksi limit switch ............................................................................ 24
Gambar 3.1. Diagram blok sistem ................................................................................ 25
Gambar 3.2. Desain mekanik keseluruhan ................................................................... 27
Gambar 3.3. Rangkaian osilator ................................................................................... 28
Gambar 3.4. Rangkaian reset untuk minimum sistem ................................................. 29
Gambar 3.5. Rangkaian minimum sistem .................................................................... 30
Gambar 3.6. Rangkaian driver motor 1 ........................................................................ 30
Gambar 3.7. Rangkaian driver motor 2 ........................................................................ 31
Gambar 3.8. Rangkaian sensor LM35 .......................................................................... 32
Gambar 3.9. Rangkaian LCD ....................................................................................... 33
Gambar 3.10. Rangkaian relay ....................................................................................... 35
Gambar 3.11. Diagram alir utama .................................................................................. 36
Gambar 3.12. Diagram alir pemotongan ........................................................................ 37
Gambar 3.13. Diagram alir pengeringan dan penyeduhan ............................................. 38
Gambar 4.1. Mekanik alat ............................................................................................ 39
xiv
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

Gambar 4.1. Mekanik alat (lanjutan) ............................................................................ 40
Gambar 4.2. Rangkaian mikrokontroler ....................................................................... 41
Gambar 4.3. Rangkaian relay ....................................................................................... 41
Gambar 4.4. Rangkaian driver ..................................................................................... 41
Gambar 4.5. LCD ......................................................................................................... 41
Gambar 4.6. Penyearah 6 Volt ..................................................................................... 41
Gambar 4.7. Kran elektrik (solenoid valve) ................................................................. 41
Gambar 4.8. Kran wastafel ........................................................................................... 41
Gambar 4.9. Hasil pemotongan dengan kondisi akar yang masih segar (basah) ......... 43
Gambar 4.10. Serbuk hasil potongan pada teh celup vs akar senggugu ......................... 44
Gambar 4.11. Penempatan sensor LM35........................................................................ 45
Gambar 4.12. Serbuk hasil pengeringan ......................................................................... 45
Gambar 4.13. Grafik suhu pengeringan pada termometer terhadap tegangan ............... 46
Gambar 4.14. Kecocokan suhu pengeringan pada termometer terhadap tegangan ........ 47
Gambar 4.15. Perbandingan serbuk akar senggugu dari hasil pengeringan dengan dua
kondisi berbeda ................................................................................................................ 47
Gambar 4.16. Penempatan sensor LM35 pada pemanas air ........................................... 48
Gambar 4.17. Hasil seduhan akar senggugu .................................................................. 48
Gambar 4.18. Grafik suhu pemanas air pada termometer terhadap tegangan ................ 50
Gambar 4.19. Kecocokan suhu pemanas air pada termometer terhadap tegangan ........ 50
Gambar 4.20. Perbandingan hasil seduhan dengan serbuk akar senggugu yang dikeringkan
dengan suhu 30°C-60°C, 53°C-60°C dan 30°C-120°C ................................................... 51
Gambar 4.20. (Lanjutan) Perbandingan hasil seduhan dengan serbuk akar senggugu yang
dikeringkan dengan suhu 30°C-60°C, 53°C-60°C dan 30°C-120°C ............................... 52
Gambar 4.21. Kekurangan saat motor2 kembali ............................................................ 52
Gambar 4.22. Listing program utama ............................................................................. 55
Gambar 4.23. Tampilan kondisi sebelum tombol ditekan .............................................. 55
Gambar 4.24. Listing program pemotongan ................................................................... 56
Gambar 4.25. Tampilan proses pemotongan setelah di eksekusi ................................... 56
Gambar 4.26. Listing program pengaturan motor DC .................................................... 57
Gambar 4.27. Motor1 naik ............................................................................................. 58
Gambar 4.28. Motor2 naik(tuang) .................................................................................. 58
Gambar 4.29. Motor1 kembali ....................................................................................... 58
xv
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

Gambar 4.30. Listing program pengeringan dan pemanasan air .................................... 60
Gambar 4.31. Tampilan suhu proses pengeringan dan pemanasan air pada LCD ......... 61
Gambar 4.32. Listing program pengendali motor servo ................................................. 61
Gambar 4.33. Kran air ON ............................................................................................. 61
Gambar 4.34. Kran air OFF ........................................................................................... 61
xvi
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

DAFTAR TABEL Halaman
Tabel 2.1. Deskripsi pin ATmega8535 .......................................................................... 7
Tabel 2.2. Sumber interupsi ........................................................................................... 10
Tabel 2.3. Tegangan dan frekuensi kerja ....................................................................... 11
Tabel 2.4. Konfigurasi bit-bit ADMUX ........................................................................ 12
Tabel 2.5. Konfigurasi bit-bit ADPS ............................................................................. 13
Tabel 2.6. Register TCCR0 ........................................................................................... 14
Tabel 2.7. Prescaler timer/counter0 .............................................................................. 14
Tabel 2.8. Mode operasi ................................................................................................ 15
Tabel 2.9. Mode Normal dan CTC ................................................................................ 15
Tabel 2.10. Mode fast PWM ........................................................................................... 15
Tabel 2.11. Mode phase correct PWM .......................................................................... 15
Tabel 2.12. Register TCNT0 .......................................................................................... 15
Tabel 2.13. Register OCR0 ............................................................................................ 16
Tabel 2.14. Register TIMSK .......................................................................................... 16
Tabel 2.15. Register TIFR .............................................................................................. 16
Tabel 2.16. Konfigurasi pin LCD ................................................................................... 19
Tabel 3.1. Penggunaan port-port pada mikrokontroler ............................................... 29
Tabel 3.2. Penggunaan port-port pada LCD ................................................................ 34
Tabel 4.1. Hasil pemotongan dengan 5 variasi waktu ................................................... 43
Tabel 4.2. Perbandingan suhu pengeringan pada referensi (termometer) pada pengeringan
terhadap tegangan keluaran sensor serta error kenaikan tegangan per derajatnya ......... 46
Tabel 4.3. Perbandingan suhu referensi (termometer) pada pemanas air terhadap tegangan
keluaran sensor serta error kenaikan tegangan per derajatnya........................................ 49
Tabel 4.4. Hasil pengujian relay .................................................................................... 53
Tabel 4.5. Hasil pengujian rangkaian driver.................................................................. 53
Tabel 4.6. Hasil pengujian tegangan output penyearah 6 Volt ...................................... 54
xvii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

DAFTAR LAMPIRAN
L.1. Hasil Pengujian Sensor Pada Proses Pengeringan ............................................ L1
L.2. Hasil Pengujian Sensor Pada Proses Pemanas Air ........................................... L1
L.2. (Lanjutan) Hasil Pengujian Sensor Pada Proses Pemanas Air ......................... L2
L.3. Listing Program Keseluruhan ........................................................................... L3
L.4. Rangkaian Keseluruhan..…………………………………………………….. L18
xviii
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

BAB I
PENDAHULUAN
1.1 Latar Belakang Indonesia sebagai negara yang kaya akan flora, memiliki banyak tanaman
yang bisa dijadikan obat. Tetapi, masih banyak orang yang tidak mengerti akan
manfaat dari tanaman obat. Banyak tanaman obat yang tumbuh liar di alam dan ada
juga yang dibudidayakan. Tanaman obat memiliki banyak khasiat untuk mengobati
penyakit. Salah satu contoh tanaman obat yang seluruh bagian tanamannya bisa
dijadikan obat adalah tanaman senggugu. Daun sengugu dapat mengobati penyakit
cacingan. Buah senggugu dapat mengobati penyakit batuk. Sedangkan, akar
tanaman senggugu dapat digunakan untuk mengobati penyakit asma, bronkitis, dan
sukar kencing. [1]
Kebanyakan pengguna, dalam pembuatan obat seduh masih secara manual,
yakni mulai dari pengeringan akar senggugu yang memanfaatkan sinar matahari
dengan waktu mencapai 2 hari. Setelah dikeringkan, akar tersebut harus dipotong
kecil-kecil lalu ditumbuk, setelah halus, barulah akar tersebut diseduh
menggunakan air panas. Air tersebut dipanaskan menggunakan kompor dengan
temperature yang tidak terukur. Apabila di kemudian hari pengguna masih
menggunakan cara pembuatan obat seduh yang seperti itu, pengguna akan
kerepotan setiap kali akan membuat obat seduh. Selain itu proses yang ditempuh
akan memakan waktu yang cukup lama.
Berdasarkan permasalahan pengguna dalam pembuatan obat seduh yang
menggunakan waktu cukup lama tersebut maka, penulis ingin membuat suatu alat
yang mampu mempermudah pengguna dalam pembuatan obat seduh secara
otomatis. Hal inilah mendasari penulis untuk mengambil tema dalam tugas akhir
yang berjudul ” Produksi Obat Asma Seduh Berbasis Mikrokontroler
ATmega8535 “. Produksi Obat Asma Seduh Berbasis Mikrokontroler
ATmega8535 meliputi proses pemotongan menggunakan blender yang
dikendalikan oleh Mikrokontroler AVR ATmega8535, pengeringan menggunakan
1
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

2
heater dilengkapi dengan dua buah sensor temperature, yaitu sensor LM35. Sistem
yang akan dibuat tersebut akan bekerja apabila tombol start ditekan, blender akan
memotong akar senggugu. Setelah selesai memotong, kemudian blender akan
terangkat oleh motor dc lalu dituangkan ke dalam gelas untuk proses pengeringan.
Setelah proses pengeringan, tahap selanjutnya adalah penyeduhan. Proses
penyeduhan ini suhu menggunakan sensor LM35 untuk mendeteksi temperature air
mendidih telah mencapai 100 C atau belum. Keseluruhan proses tersebut, mulai
dari pemotongan, pemgeringan, dan penyeduhan di kendalikan oleh mikrokontroler
AVR ATmega8535.
1.2 Tujuan dan Manfaat Tujuan penelitian ini adalah menghasilkan suatu sistem produksi obat asma
seduh dari akar senggugu secara otomatis.
Manfaat dari penelitian ini adalah untuk mempermudah pengguna obat asma
seduh dalam pembuatan obat asma seduh yang berasal dari akar senggugu.
1.3 Batasan Masalah Adapun masalah yang terdapat pada proses penelitian ini adalah sebagai
berikut:
1. Akar senggugu sebagai bahan baku utama obat asma.
2. Kontroler yang dipakai adalah ATmega8535.
3. Alat pemotong yang digunakan adalah blender.
4. Proses pengeringan dan penyeduhan menggunakan pemanas ( heater ) yang
dilengkapi dengan sensor temperature LM35 dengan suhu yang diatur adalah
60°𝐶 untuk pengeringan dan 100°𝐶 untuk titik didih air.
5. Proses pengangkatan dan penuangan menggunakan 2 buah motor DC 12V .
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

3
1.4 Metodologi Penelitian Penulisan skripsi ini menggunakan metode :
a. Pengumpulan bahan-bahan referensi berupa buku-buku dan jurnal-
jurnal.
b. Perancangan subsistem hardware dan software. Tahap ini bertujuan
untuk mencari bentuk model yang optimal dari sistem yang akan dibuat dengan
mempertimbangkan dari berbagai faktor-faktor permasalahan dan kebutuhan
yang telah ditentukan. Gambar 1.1 memperlihatkan blok model yang akan
dirancang.
Gambar 1.1 Blok model perancangan
Dari diagram blok diatas dapat diuraikan tahap-tahap dari perancangan:
1. Akar senggugu sebanyak 10 gram dimasukkan ke dalam blender untuk
proses pemotongan.
2. Setelah proses pemotongan, selanjutnya menuju ke proses pengeringan
yang menggunakan pemanas ( heater ) dengan suhu yang diatur adalah
60°C selama 4 menit 27 detik.
3. Setelah dikeringkan maka selanjutnya adalah proses penyeduhan dengan
temperature yang diatur adalah 100°𝐶 untuk titik didih air dengan
menggunakan sensor LM35.
4. Semua proses pengendalian tersebut, dikendalikan oleh mikrokontroler.
Mulai dari pemotongan akar senggugu, lama pengeringan, serta suhu
yang dibutuhkan untuk air mendidih. Selain itu digunakan
penampil/LCD yang berfungsi untuk menampilkan kondisi dari alat
tersebut.
c. Pembuatan subsistem hardware dan software. Berdasarkan gambar 1.1,
sistem akan bekerja setelah mikrokontroler memberikan instruksi untuk
Pemotongan Pengeringan Penyeduhan
Mikrokontroler dan Penampil
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

4
melakukan pengendalian dan menyajikannya sebagai informasi pada
penampil.
d. Proses pengambilan data. Teknik pengambilan data dengan cara mengambil
data berupa berapa waktu yang ditempuh untuk proses pemotongan
sehingga akar senggugu mejadi terpotong kecil-kecil/halus, untuk proses
pengeringan dan penyeduhan data yang diambil berupa data keluaran
sensor LM35 yang berupa tegangan dan suhu berapa yang harus
dipertahankan
e. Analisa dan penyimpulan hasil perancangan. Analisa data dilakukan dengan
mengecek keakuratan data berupa suhu, tegangan, dan waktu dengan
membandingkan data mulai dari pemotongan, pengeringan, sampai
penyeduhan dengan data teori. Penyimpulan hasil perancangan dapat
dilakukan dengan menghitung persentase error yang terjadi.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

BAB II
DASAR TEORI
2.1 TANAMAN SENGGUGU (Clerodendron serratum)
Gambar 2.1 Tanaman senggugu[1]
Tanaman senggugu tumbuh liar pada tempat-tempat terbuka atau agak
teduh, bisa ditemukan di hutan sekunder, padang alang-alang, pinggir kampung,
pinggir jalan, atau dekat air yang tanahnya agak lembab. Senggugu dapat
tumbuh di ketinggian 1–1700m di atas permukaan laut[1]. Tanaman perdu ini
mencapai tinggi 1–3m, batang berongga, berbongkol besar, akarnya berwarna
abu kehitaman. Daun senggugu berjenis daun tunggal, letaknya berhadapan,
bertangkai pendek, bentuk bulat telur sungsang sampai lanset, tebal dan kaku,
dengan ujung runcing dan pangkal tumpul, tepi bergerigi tajam, dan kedua
permukaan berambut halus. Panjang daun 8-30cm, lebar 4-14cm, dan berwarna
hijau. Senggugu mempunyai sifat bunga majemuk yang panjangnya 6-40cm,
berwarna putih kehijauan, yang pada tiap ujung bunga keluar percabangan.
Buah senggugu termasuk jenis buah batu, berbentuk bulat telur sungsang,
berwarna hijau kehitaman. Senggugu diduga tumbuhan asli Asia Tropik, dan
diperbanyak dengan biji.
Tanaman senggugu bersifat pahit, pedas dan sejuk yang sifatnya
menghilangkan sakit (analgetik). Berikut ini adalah penyakit yang dapat
disembuhkan oleh tanaman senggugu beserta cara penggunaannya, yaitu[1]:
5
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

6
1. Borok berair.
Cara penggunanya dengan menyiapkan daun segar secukupnya lalu direbus
. Setelah itu air hasil rebusan yang dihasilkan digunakan untuk mencuci
bagian yang sakit.
2. Rematik.
Cara penggunaanya dengan cara menumbuk daun segar dengan adas
pulasari atau dengan meremas daun dengan campuran sedikit kapur hingga
halus. Setelah itu hasil tumbukan/remasan dapat dikemas sebagai saleb atau
obat gosok untuk dioleskan pada bagian tubuh yang terkena rematik
3. Perut busung, cacingan.
Cara penggunaannya dengan cara menyeduh daun senggugu yang dicampur
dengan garam dan temulawak, setelah itu hasil seduhan diberikan kepada
pasien untuk diminum.
4. Batuk.
Cara penggunaannya dengan mengunyah buah senggugu yang dicampur
dengan sirih lalu ditelan dengan menggunakan air hangat.
5. Asma, bronchitis, susah kencing.
Cara penggunaannya dengan menyeduh akar senggugu tanpa campuran
apapun kemudian hasil seduhan dapat diminum dengan keadaan hangat.
Akar senggugu dicuci bersih, lalu dipotong kecil-kecil. Seduh bahan dengan
1 cangkir air mendidih. Setelah dingin lalu diminum. Aturan pakai diminum
3 kali sehari dengan dosis yang sama.
2.2 Mikrokontroler AVR Mikrokontroler adalah sebuah sistem microprocessor yang di dalamnya
sudah terdapat CPU, ROM, RAM, I/O, clock dan peralatan internal lainya yang
saling terhubung dan terorganisasi (teralamati) dan dikemas dalam satu chip[2].
Sehingga pengguna tinggal memprogram isi ROM sesuai aturan penggunaan oleh
pabrik yang membuatnya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

7
2.2.1 Konfigurasi Pin ATmega8535 terdiri atas 40 pin dengan konfigurasi seperti pada gambar 2.2
dan deskripsi pin ATmega8535 pada tabel 2.1[2].
Gambar 2.2 Konfigurasi pin [2]
Tabel 2.1 Deskripsi pin ATmega8535[2]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

8
2.2.2 Peta Memori Arsitektur AVR terdiri atas dua memori utama, yaitu data memori dan
program memori, sebagai tambahan fitur dari ATmega8535 terdapat EEPROM 512
byte sebagai memori data dan dapat diprogram saat operasi [2].
ATmega8535 terdiri atas 8 Kbyte On-chip In-Sistem Reprogrammable
Flash Memory untuk menyimpan program. Karena seluruh instruksi AVR dalam
bentuk 16 bit atau 36 bit. Flash dirancang dengan kompisisi 4K x 16. Untuk
mendukung keamanan software atau program, flash program memori dibagi
menjadi dua bagian yaitu bagian boot program dan bagian application program.
Gambar 2.3 mengilustrasikan susunan memori program flash ATmega8535[2].
Gambar 2.3 Peta memori program [2]
2.2.3 Stack Pointer Stack Pointer merupakan suatu bagian dari AVR yang berguna untuk
menyimpan data sementara, variabel lokal, dan alamat kembali dari suatu interupsi
ataupun subrutin. Stack Pointer diwujudkan sebagai dua unit register, yaitu SPH
dan SPL [2].
Saat awal, SPH dan SPL akan bernilai 0, sehingga perlu diinisialisasi terlebih
dahulu. SPH merupakan byte atas / Most Significant Bit (MSB), sedangkan SPL
merupakan byte bawah / Least Significant Bit (LSB). Hal ini hanya berlaku untuk
AVR dengan kapasitas SRAM lebih dari 256 byte[2].
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

9
2.2.4 Phase Correct PWM Mode
Pada mode ini sama dengan “phase & frequency correct PWM” pada cara
operasi cacahan register TCNT1 menggunakan dual slope (dua arah/bolak-balik) di
mana TCNT1 mencacah dari BOTTOM (0x0000) counting-up hingga mencapai
TOP (resolusi yang digunakan) kemudian counting-down hingga BOTTOM
(0x0000) dan begitu seterusnya.
Resolusi mode phase correct PWM dapat kita tentukan secara tetap 8-, 9-, 10-bit
atau kita tentukan menggunakan register ICR1 atau OCR1A dimana resolusi
minimal yang diizinkan adalah 2-bit (ICR1/OCR1A diisi dengan 0x0003) dan
maksimal 16-bit (ICR1/OCR1A diisi dengan 0xFFFF). Rumus untuk menentukan
resolusi mode phase correct PWM.
𝑅𝑃𝐶𝑃𝑊𝑀 = log (𝑇𝑂𝑃+1)log (2)
(2.1)
Dalam mode non-inverting saluran keluaran PWM Pin OC1x di-clear pada saat
compare match (TCNT1=OCRx) ketika counting-up dan di-set pada saat compare
match ketika counting down.
Gambar 2.4 Pulsa phase correct PWM [2]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

10
Dalam mode inverting saluran keluaran PWM pin OC1x di-set pada saat compare
match (TCNT1=OCRx) ketika counting-up dan di-clear pada saat compare match
ketika counting-down [2].
Frekuensi mode phase correct PWM ditentukan dengan rumus:
𝑓𝑂𝐶𝑛𝑥𝑃𝐶𝑃𝑃𝑊𝑀 = 𝑓𝑐𝑙𝑘_𝐼/𝑂
2 .𝑁 .𝑇𝑂𝑃
(2.2)
2.2.5 Interupsi ATmega8535 memiliki 21 buah sumber interupsi [2]. Interupsi tersebut
bekerja jika bit 1 pada Register status atau Status Register (SREG) dan bit pada-
masing-masing register bernilai 1. Penjelasan sumber interupsi terdapat pada tabel
2.2.
Tabel 2.2 Sumber interupsi[2]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

11
2.2.6 Reset dan osilator eksternal
Gambar 2.5 Rangkaian reset [2]
Rangkaian osilator adalah rangkaian pembangkit frekuensi untuk
menentukan besarnya waktu untuk tiap siklus pada mikrokontroler. Chip akan reset
jika tegangan catu nol atau pin RST dipaksa 0. Jika membutuhkan tombol reset,
dapat ditambah dengan rangkaian reset seperti pada gambar 2.5[2].
Tabel 2.3 Tegangan dan frekuensi kerja[2]
Tabel 2.3 menunjukkan tegangan dan frekuensi kerja pada mikroprosesor
ATmega. Tegangan kerja chip tipe L dapat beroperasi 2,7 – 5,5V.
2.2.7 Osilator Mikrokontroler Rangkaian osilator adalah rangkaian pembangkit frekuensi untuk
menentukan besarnya waktu untuk tiap siklus pada mikrokontroler [2]. Waktu yang
dibutuhkan tiap satu siklus dapat dicari dengan persamaan :
TCycle = 12 𝐹𝑜𝑠𝑐
(2.3)
dengan 𝐹𝑜𝑠𝑐 adalah frekuensi osilator pada mikrokontroler.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

12
2.2.8 Analog to Digital Converter Analog To Digital Converter (ADC) pada ATmega8535 terhubung ke
sebuah multiplekser analog yang diperlukan untuk memilih kanal ADC yang akan
digunakan. ATmega8535 memiliki 8 kanal ADC. ADC ATmega8535 dapat
diaktifkan dengan memberikan supply tegangan pada port ADC [2].
ADC memiliki dua jenis mode yang dapat digunakan, yaitu mode single
conversion dan mode free running. Pada mode single conversion, ADC harus
diaktifkan setiap kali akan digunakan. Pada mode free running, ADC cukup
diaktifkan sekali dan selanjutnya ADC akan terus mengkonversi tanpa henti.
Pada saat mengakses ADC, register-register I/O yang terlibat dalam ADC
akan mengalami beberapa proses pengaturan. Proses-proses pengaturan tersebut
antara lain:
a. Menentukan sumber tegangan referensi
Tegangan referensi pada ADC merupakan batas rentang representasi nilai
digital hasil konversi. Hasil konversi pada mode single ended cenversion
dirumuskan sebagai berikut:
REF
IN
VV
ADC1024⋅
=
(2.4)
Keterangan persamaan 2.4 :
VIN = tegangan masukkan analog pada kanal ADC yang aktif
VREF = tegangan referansi yang dipilih
Tabel 2.4. Konfigurasi bit-bit ADMUX[2]
b. Memilih kanal yang aktif
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

13
Kanal yang aktif ditentukan oleh bit-bit MUX4-MUX0 pada register
ADMUX. Tabel 2.3 menunjukkan konfigurasi bit-bit tersebut.
c. Menentukan prescaler
Prescaler (clock ADC) merupakan faktor pembagi yang diterapkan pada
clock mikrokontroler. ADC mikrokontroler harus menerima frekuensi clock yang
tepat agar data hasil konversi cukup valid. Nilai prescaler ditentukan oleh bit-bit
ADC Prescaler Select Bits (ADPS). Tabel 2.5 menunjukkan konfigurasi bit-bit
ADPS.
Tabel 2.5. Konfigurasi bit-bit ADPS [2]
d.Inisialisasi ADC
Untuk mengaktifkan ADC, bit ADC Enable (ADEN) harus diberi logika ‘1’
(set). Untuk memulai ADC, logika ‘1’ juga harus diberikan pada bit ADC Start
Conversion (ADSC). Waktu yang diperlukan untuk konversi adalah 25 siklus clock
ADC pada konversi pertama dan 13 siklus clock ADC untuk konversi berikutnya.
2.2.9 Timer/counter 0 Timer/counter 0 adalah sebuah timer/counter yang dapat mencacah sumber
pulsa/clock baik dari dalam chip (timer) ataupun dari luar chip (counter) dengan
kapasitas 8-bit atau 256 cacahan [2].
Dapat digunakan untuk :
a. Timer/counter biasa
b. Clear Timer on Compare Match (selain ATmega8)
c. Generator frekuensi (selain ATmega8)
d. Counter pulsa eksternal.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

14
Mempunyai hingga 10-bit (1024) Clock Prescaler (pemilihan clock yang masuk ke
timer/counter).
2.2.10 Register Pengendali Timer 0 Timer/Counter Control Register – TCCR0
Tabel 2.6. Register TCCR0 [2]
Bit CS00 s.d. 02 bertugas untuk memilih (prescaler) atau mendefinisikan
pulsa/clock yang akan masuk ke dalam timer/counter0 [2]. Tabel 2.6 menunjukkan
register pada TCCR0 dan Tabel 2.7 menunjukkan prescaler timer/counter0.
Tabel 2.7. Prescaler timer/counter0 [2]
(1 clk timer/counter0= 8 clk cpu) artinya tiap 8 clock CPU yang masuk ke dalam
timer/counter0 dihitung satu oleh register pencacah TCNT0. Falling edge adalah
perubahan pulsa/clock dari 1 ke 0. Rising edge adalah perubahan pulsa/clock dari 0
ke 1. Bit 7 – F0C0 : Force Output Compare
Bit ini hanya dapat digunakan untuk metode pembanding . Jika bit – F0C0 di-set
maka akan memaksa terjadinya compare-match (TCNT0==OCR0).
Bit 3, 6 – WGM01:0: Waveform Generation Mode
Kedua bit ini digunakan memilih mode yang digunakan, seperti yang terlihat pada
Tabel 2.8.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
15
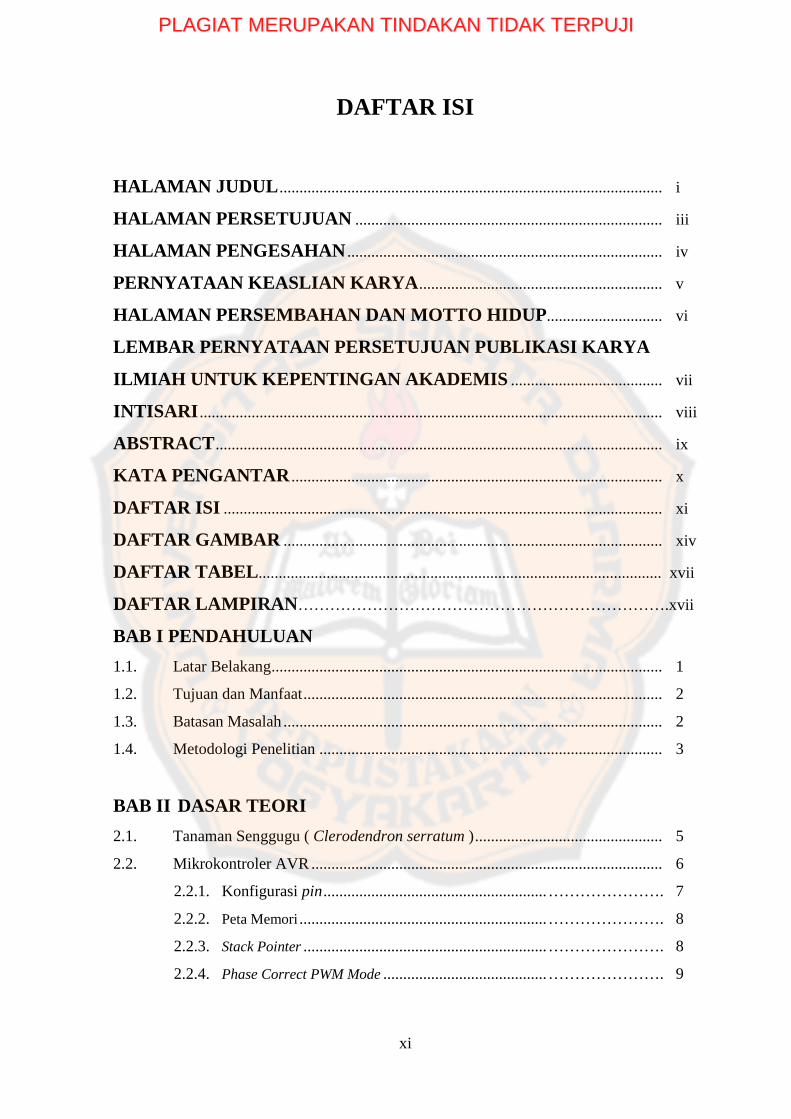
Tabel 2.8. Mode operasi [2]
Bit 5:4 – COM01:0: Compare Match Output Mode
Kedua bit ini berfungsi mendefinisikan pin OC0 sebagai output timer0 (atau
sebagai saluran output PWM). Tabel 2.9 menunjukkan output pin OC0 pada mode
Normal dan CTC, Tabel 2.10 menunjukkan output pin OC0 pada mode Fast PWM
dan Tabel 2.11 menunjukan output pin OC0 pada mode Phase Correct PWM.
Tabel 2.9. Mode Normal dan CTC [2]
Tabel 2.10. Mode Fast PWM [2]
Tabel 2.11. Mode Phase Correct PWM [2]
Tabel 2.12. Register TCNT0 [2]
Register ini bertugas menghitung pulsa yang masuk ke dalam timer/counter, seperti
terlihat pada Tabel 2.12 [2]. Kapasitas register ini 8-bit atau 255 hitungan, setelah
mencapai hitungan maksimal maka akan kembali ke nol (overflow/limpahan).
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

16
Output Compare Register – OCR0
Tabel 2.13. Register OCR0 [2]
Register ini bertugas sebagai register pembanding yang bisa kita tentukan
besarnya sesuai dengan kebutuhan, seperti terlihat pada Tabel 2.13 [2]. Dalam
praktiknya pada saat TCNT0 mencacah maka otomatis oleh CPU aka
membandingkan dengan isi OCR0 secara kontinyu dan jika isi TCNT0 sama
dengan isi OCR0 maka akan terjadi compare match yang dapat dimanfaatkan untuk
mode CTC dan PWM.
Timer/Counter Interrupt Mask Register – TIMSK
Tabel 2.14. Register TIMSK [2]
Tabel 2.14 menunjukan register TIMSK [2].
Bit 0 – TOIE0: T/Co Overflow Interrupt Enable
Dalam register TIMSK timer/conter0 memiliki bit TOIE0 sebagai bit peng-aktif
interupsi timer/counter0 (TOIE0=1 enable, TOIE0=0 disable).
Bit 1 – OCIE0: T/Co Output Compare Match Interrupt Enable
Selain ATmega8, TIMSK timer/counter0 memiliki bit OCIE0 sebagai bit peng-
aktif interupsi compare match timer/counter0 (OCIE0=1 enable, OCIE0=0
disable).
Timer/Counter Interrupt Flag Register – TIFR
Tabel 2.15. Register TIFR [2]
Tabel 2.15 menunjukan register TIFR [2].
Bit 1 – OCF0: Output Compare Flag 0
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

17
Flag OCF0 akan set sebagai indikator terjadinya compare match, dan akan clear
sendiri bersamaan eksekusi vektor interupsi timer0 compare match.
Bit 0 – TOC0: Timer /Counter 0 Overflow flag
Bit status timer/counter0 dalam register TIFR, di mana bit-TOV0 (Timer/Counter0
overflow) akan set secara otomatis ketika terjadi limpahan/overflow pada register
TCNT0 dan akan clear bersamaan dengan eksekusi vektor interupsi.
Perhitungan overflow interupt sebagai pembangkit PWM ditunjukkan pada
persamaan 2.5 berikut [2]:
Timer overflow = 1𝑓𝑐𝑟𝑦𝑠𝑡𝑎𝑙
𝑥(𝐹𝐹 + 1) (2.5)
2.2.11 Driver
Gambar 2.6 IC driver L298 [5]
Ada beberapa macam model rangkaian driver di antaranya yaitu driver yang
menggunakan IC L298 [5].
IC L298 memiliki kemampuan menggerakkan motor DC sampai arus 4A dan
tegangan maksimum 46V DC untuk satu kanalnya. Driver motor DC dengan IC
L298 diperlihatkan pada gambar 2.6. Pin Enable A dan B untuk mengendalikan
kecepatan motor, pin input -1 sampai -4 untuk mengendalikan arah putaran. Pin
Enable diberi VCC 5V untuk kecepatan penuh dan PWM (Pulse Width
Modulation) untuk kecepatan rotasi yang bervariasi tergantung dari levelnya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

18
2.3 LCD
Gambar 2.7 LCD 2 x 16 [3]
LCD ini digunakan sebagai penampil keluaran mikrokontroller khusus untuk mode
tampilan pesan. LCD yang digunakan adalah LCD yang menggunakan chip
kontroler Hitachi HD44780, misalnya M1632. LCD bertipe ini memungkinkan
pemrogram untuk mengoperasikan komunikasi data secara 8 bit atau 4 bit. Jika
menggunakan jalur data 4 bit maka akan ada 7 jalur data (3 untuk jalur kontrol dan
4 untuk jalur data). Jika menggunakan jalur data 8 bit maka akan ada 11 jalur data
(3 untuk jalur kontrol dan 8 untuk jalur data). Tiga jalur kontrol ke LCD ini adalah
EN (Enable), RS (Register Select) dan R/W (Read/Write) [3].
Interface LCD merupakan sebuah parallel bus, dimana hal ini sangat
memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke
LCD. Kode ASCII yang ditampilkan sepanjang 8 bit dikirim ke LCD secara 4 atau
8 bit pada satu waktu. Jika mode 4 bit yang digunakan, maka 2 nibble data dikirim
untuk membuat menjadi 8 bit (pertama dikirim 4 bit MSB lalu 4 bit LSB dengan
pulsa clock EN setiap nibblenya). Pengiriman data secara paralel baik 4 atau 8 bit
merupakan 2 mode operasi primer. Penentuan mode operasi merupakan hal yang
paling penting. Mode 8 bit sangat baik digunakan ketika kecepatan menjadi
keutamaan dalam sebuah aplikasi dan setidaknya minimal tersedia 11 pin I/O (3 pin
untuk kontrol, 8 pin untuk data). Sedangkan mode 4 bit minimal hanya
membutuhkan 7 bit (3 pin untuk kontrol, 4 untuk data). Karena dalam penelitian ini
kecepatan tidak sangat diutamakan, maka dipilih mode 4 bit. Interface LCD dengan
mode 4 bit dapat dilihat pada Gambar 2.7.
LCD jenis M1632 memiliki jumlah pin sebanyak 16 yang memiliki fungsi berbeda.
Fungsi tersebut disajikan pada tabel 2.16.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

19
Tabel 2.16. Konfigurasi pin LCD [3]
Fungsi Pin LCD pada tabel 2.5. adalah :
1. Vlcd merupakan pin yang digunakan untuk mengatur tebal tipisnya karakter
yang tertampil dengan cara mengatur tegangan masukan.
2. DB0 s/d DB7 merupakan jalur data yang dipakai untuk menyalurkan kode
ASCII maupun perintah pengatur LCD.
3. Register Select (RS) merupakan pin yang dipakai untuk membedakan jenis
data yang dikirim ke LCD. Jika RS berlogika ‘0’, maka data yang dikirim
adalah perintah untuk mengatur kerja LCD. Jika RS berlogika ‘1’, maka
data yang dikirimkan adalah kode ASCII yang ditampilkan.
4. Read/Write (R/W) merupakan pin yang digunakan untuk mengaktifkan
pengiriman dan pengembalian data ke dan dari LCD. Jika R/W berlogika
‘1’, maka akan diadakan pengambilan data dari LCD. Jika R/W berlogika
‘0’, maka akan diadakan pengiriman data ke LCD.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

20
5. Enable (E) merupakan sinyal singkronisasi. Saat E berubah dari logika ‘1’
ke ‘0’, data di DB0 s/d DB7 akan diterima atau diambil diambil dari port
mikrokontroler.
6. Anoda (A) dan Katoda (K) merupakan pin yang digunakan untuk
menyalakan backlight dari layar LCD.
2.4 Sensor LM35
Gambar 2.8 LM35[6]
Sensor suhu LM35 adalah suatu alat untuk mendeteksi atau mengukur suhu
pada suatu ruangan atau sistem tertentu yang kemudian diubah keluarannya
menjadi besaran listrik. LM35 merupakan sensor suhu yang paling banyak
digunakan, karena selain harganya terjangkau juga linearitasnya lumayan bagus.
LM35 tidak membutuhkan kalibrasi eksternal yang menyediakan akurasi ±1/4°C
pada temperature ruangan dan ±3/4°C pada kisaran -55°C sampai +150°C[6].
Sensor suhu LM35 berfungsi untuk mengubah besaran fisis yang berupa suhu
menjadi besaran listrik, yaitu tegangan. Sensor ini memiliki parameter bahwa setiap
kenaikan 1°C tegangan keluarannya naik sebesar 10mV dengan batas maksimal
keluaran sensor adalah 1,5 volt pada suhu 150°C.
LM35 memiliki kelebihan-kelebihan sebagai berikut:
1. Dikalibrasi langsung dalam derajat Celcius.
2. Memiliki faktor skala linear +10,0mV/°C.
3. Jangkauan maksimal suhu antara -55°C sampai 150°C.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

21
Sensor suhu LM35 merupakan IC sensor temperature yang akurat yang
tegangan keluarannya linear dalam satuan Celcius. LM35 memiliki impedansi
keluaran yang rendah, keluaran yang linear, dan sifat ketepatan dalam pengujian
membuat proses pembacaan lebih mudah.
2.5 Motor DC
Gambar 2.9. Konstruksi Motor DC [7]
Motor DC merupakan jenis motor yang menggunakan tegangan searah sebagai
sumber tegangannya. Dengan memberikan beda tegangan pada kedua terminal
tersebut, motor akan berputar pada satu arah, dan bila polaritas dari tegangan
tersebut dibalik maka arah putaran motor akan terbalik pula. Polaritas dari tegangan
yang diberikan pada dua terminal menentukan arah putaran motor sedangkan besar
dari beda tegangan pada kedua terminal menentukan kecepatan motor. gambar 2.9
menunjukkan konstruksi motor DC[7].
Motor DC memiliki 2 bagian dasar :
1. Bagian yang tetap/stasioner yang disebut stator. Stator ini menghasilkan
medan magnet, baik yang dibangkitkan dari sebuah coil (elektro magnet) ataupun
magnet permanen.
2. Bagian yang berputar disebut rotor. Rotor ini berupa sebuah coil dimana
arus listrik mengalir.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

22
2.6 Relay
Gambar 2.10 Relay[8]
Relay berfungsi untuk menghubungkan atau memutuskan aliran listrik yang
dikontrol dengan memberikan tegangan dan arus tertentu pada coil. Ada 2 macam
relay berdasarakan tegangan untuk menggerakkan coil, yaitu AC dan DC[8].
Relay adalah sebuah kumparan yang dialiri arus listrik sehingga kumparan
mempunyai sifat sebagai magnet. Magnet sementara tersebut digunakan untuk
menggerakkan suatu sistem saklar yang terbuat dari logam sehingga pada saat relay
dialiri arus listrik maka kumparan akan terjadi kemagnetan dan menarik logam
tersebut, saat arus listrik diputus maka logam akan kembali pada posisi semula.
Prinsip kerja relay :
Gambar 2.11. Prinsip kerja relay[8]
Relay terdiri dari coil dan contact. Coil adalah gulungan kawat yang
mendapat arus listrik, sedangkan contact adalah saklar yang pergerakannya
tergantung dari ada tidaknya arus listrik pada coil [8].
Ketika coil mendapat energy listrik, maka akan timbul gaya elektromagnet
yang akan menarik pegas dan contacts akan tertutup.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

23
Untuk dapat menggunakan transistor sebagai saklar maka transistor dikonfigurasi
sehingga bekerja di daerah cut-off dan saturasi [4]. Perubahan ini dapat digunakan
untuk mengaktifkan relay atau sebagai input bagi mikrokontroler. Transistor yang
berada dalam keadaan saturasi seperti sebuah saklar yang tertutup sedangkan
transistor saat cutoff seperti sebuah saklar yang terbuka. Perhitungan besarnya arus
basis pada konfigurasi Gambar 2.8 adalah sebagai berikut :
𝐼𝐵 = 𝑉𝐵𝐵−𝑉𝐵𝐸𝑅𝐵
(2.5)
Beta DC ( )β sebuah transistor merupakan rasio arus kolektor DC dengan arus basis
DC, dapat dihitung dengan persamaan berikut :
β = 𝐼𝐶𝐼𝐵
(2.6)
Sehingga diperoleh juga persamaan untuk IBmin sebagai berikut :
𝐼𝐵𝑚𝑖𝑛𝐼𝐶𝑠𝑎𝑡𝛽
(2.7)
Arus IC saturasi (ICsat)dapat diperoleh pada saat nilai VCE = 0, sehingga besarnya
arus Ic saturasi dapat diperoleh dengan persamaan sebagai berikut :
𝐼𝐶𝑠𝑎𝑡 = 𝑉𝑐𝑐𝑅𝑐
(2.8)
Gambar 2.12. Konfigurasi transistor sebagai saklar[4]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

24
2.7 Limit Switch
Gambar 2.13 Simbol dan bentuk limit switch[9]
Limit switch merupakan jenis saklar yang dilengkapi dengan katup yang
berfungsi menggantikan tombol[9]. Prinsip kerja limit switch sama seperti saklar
push ON yaitu hanya akan menghubung pada saat katupnya ditekan pada batas
penekanan tertentu yang telah ditentukan dan akan memutus saat saat katup tidak
ditekan. Limit switch termasuk dalam kategori sensor mekanis yaitu sensor yang
akan memberikan perubahan elektrik saat terjadi perubahan mekanik pada sensor
tersebut. Penerapan dari limit switch adalah sebagai sensor posisi suatu benda
(objek) yang bergerak. Simbol limit switch ditunjukan pada gambar 2.13.
Limit switch umumnya digunakan untuk : memutuskan dan menghubungkan
rangkaian menggunakan objek atau benda lain[9]. Menghidupkan daya yang besar,
dengan sarana yang kecil. Sebagai sensor posisi atau kondisi suatu objek. Prinsip
kerja limit switch diaktifkan dengan penekanan pada tombolnya pada batas/daerah
yang telah ditentukan sebelumnya sehingga terjadi pemutusan atau penghubungan
rangkaian dari rangkaian tersebut. Limit switch memiliki 2 kontak yaitu NO
(Normally Open) dan kontak NC (Normally Close) dimana salah satu kontak akan
aktif jika tombolnya tertekan. Konstruksi limit switch dapat dilihat pada gambar
2.14.
Gambar 2.14 Konstruksi limit switch[9]
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

BAB III
RANCANGAN PENELITIAN Pada bab ini akan dijelaskan mengenai perancangan pembuatan ” Produksi
Obat Asma Seduh Berbasis Mikrokontroler ATmega8535 “ mulai dari diagram alir
sistem, perancangan hardware baik dari segi mekanik maupun elektronik, dan juga
perancangan perangkat lunak.
3.1 Diagram Blok Sistem
Akar sengggugu Pemotongan dengan blender Pengeringan Penyeduhan Hasil
penyeduhan
Driver 1
Motor 1
Driver 2
Motor 2
Relay LM35
Relay
Heater
Pemanas air
Relay
Mikrokontroler ATmega8535
Tombol start
Penampil / LCD
Gambar 3.1. Diagram blok sistem
25
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

26
Diagram blok sistem penelitian pada gambar 3.1 menunjukkan urutan cara
kerja sistem. Sistem terdiri dari tiga bagian utama, yaitu proses pemotongan, proses
pengeringan, dan proses penyeduhan.
Proses pemotongan menggunakan blender sebagai mesin pemotong, dengan akar
senggugu sebagai input. Proses pengeringan menggunakan lempengan besi untuk
penjepit heater. Proses penyeduhan berperan menghasilkan seduhan dari akar
senggugu yang siap untuk diminum.
Kendali utama sistem berada di mikrokontroler ATmega8535. LCD
digunakan sebagai tampilan data yang dikeluarkan dari sensor temperature LM35.
Sistem ini akan bekerja jika akar senggugu dimasukan lalu aktifkan tombol
start, kemudian mikrokontroler akan mengaktifkan relay untuk menghidupkan
blender selama 5 menit. Setelah itu mikrokontroler akan mengontrol motor 1
melalui driver motor 1 untuk mengangkat blender selama 5 detik.
Proses selanjutnya, mikrokontroler akan mengontrol motor 2 melalui driver
2 untuk menuangkan dengan selama 10 detik.
Pada proses pengeringan, mikrokontroler akan mengaktifkan relay untuk
menghidupkan heater. Dalam proses pengeringan terdapat sensor LM35 sebagai
pendeteksi suhu. Proses ini akan berlangsung selama 4 menit 27 detik dengan suhu
pengeringan yaitu 60°C.
Setelah proses pengeringan selesai dilanjutkan dengan proses penyeduhan.
Pada proses penyeduhan, mikrokontroler akan mengaktifkan kran air jika suhu air
telah mencapai 100°C.
Setelah itu air akan keluar menuju gelas. Proses penyeduhan berperan
menghasilkan seduhan dari akar senggugu yang siap untuk diminum.
3.2 Perancangan Hardware Hardware menjadi salah satu bagian paling penting untuk membangun
suatu sistem untuk dapat berjalan dengan baik. Pada penelitian ini, hardware
dibagi dalam dua kategori, yaitu hardware mekanik dan hardware elektronika.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

27
3.3 Hardware Mekanik Hardware mekanik berisi komponen-komponen mekanik yang disusun
membentuk suatu sistem mekanik yang berupa urutan dari proses alat. Komponen
penyusun sistem terlihat seperti pada gambar 3.2.
Gambar 3.2. Desain Mekanik Keseluruhan
Keterangan gambar :
1. Motor 1 5. Gelas
2. Motor 2 6. Pemanas air
3. Kotak komponen 7. Kran
4. Blender 8. Heater pengering
Cara kerja:
Pertama, akar senggugu dimasukan kedalam blender untuk proses
pemotongan. Setelah blender pada kondisi OFF, motor 1 akan naik mengangkat
blender, kemudian motor 2 akan ON dan menumpahkan akar senggugu kedalam
gelas untuk dikeringkan dengan suhu 60C lalu motor 2 OFF, lalu air akan keluar
melalui kran setelah suhu pada pemanas air pada keadaan 100C.
3.4 Hardware Elektronika Perancangan Hardware elektronika diperlukan dalam penyusun sistem,
dikarenakan hardware elektronika merupakan salah satu bagian penting sistem ini
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

28
agar sistem dapat dikendalikan. Komponen penyusun hardware elektronika
meliputi rangkaian pengendali, rangkaian penggerak (driver), rangkaian sensor, dan
rangkaian penampil.
3.4.1 Minimum Sistem ATmega8535 Rangkaian minimum sistem berfungsi sebagai I/O untuk mengolah data dari
sensor LM35 kemudian digunakan sebagai input untuk proses pengeringan.
Mikrokontroler ATmega8535 sendiri telah dilengkapi dengan osilator internal (On
Chip Osilator) yang dapat digunakan sebagai sumber clock bagi CPU. Namun,
osilator ini maksimal 8Mhz. Sehingga penulis menambahkan sebuah kristal dan
dua buah kapasitor pada Pin XTAL1 dan Pin XTAL2. Rangkaian osilator pada
perancangan ini menggunakan kristal 12 MHz dan dua buah kapasitor 22 pF seperti
yang ditunjukkan oleh gambar 3.3.
Gambar 3.3. Rangkaian osilator
Rangkaian minimum sistem disediakan juga fasilitas reset yang berguna
untuk membuat mikrokontroler memulai kembali pembacaan program dari awal.
Prinsipnya, jika tombol reset ditekan, maka pin reset akan mendapat input logika
rendah atau tegangan catu nol maka mikrokontroler akan mengulang proses dari
awal lagi. Rangkaian reset untuk minimum sistem terlihat seperti pada gambar 3.4.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

29
Gambar 3.4. Rangkaian reset untuk minimum sistem
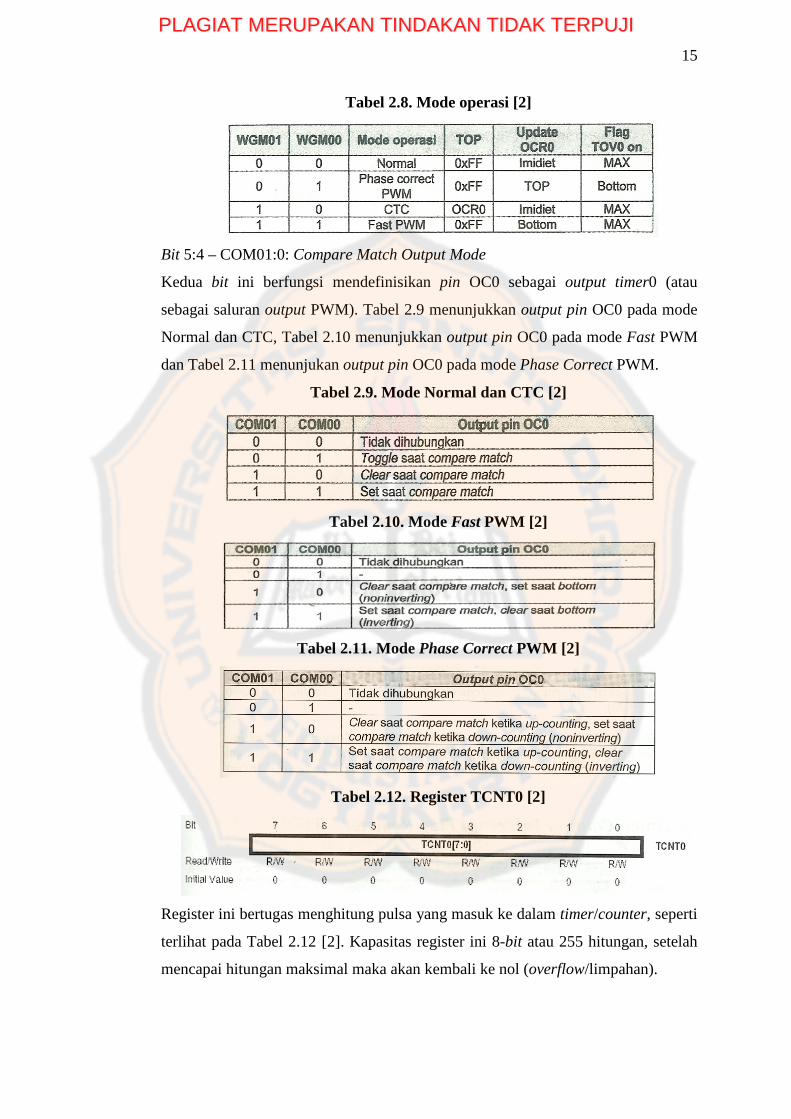
Pengolahan data dari sensor LM35 menggunakan port A pada
mikrokontroler karena terdapat fungsi ADC di dalamnya. Port D digunakan
sebagai input rangkaian driver karena terdapat fungsi PWM didalamnya. Secara
keseluruhan gambar minimum sistem mikrokontroler ATmega8535 ditunjukkan
oleh gambar 3.5 dan penggunaan port–port pada mikrokontroler ditunjukan pada
tabel 3.1.
Tabel 3.1. Penggunaan port-port pada mikrokontroler
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
30
Gambar 3.5. Rangkaian minimum sistem
3.4.2 Driver Motor
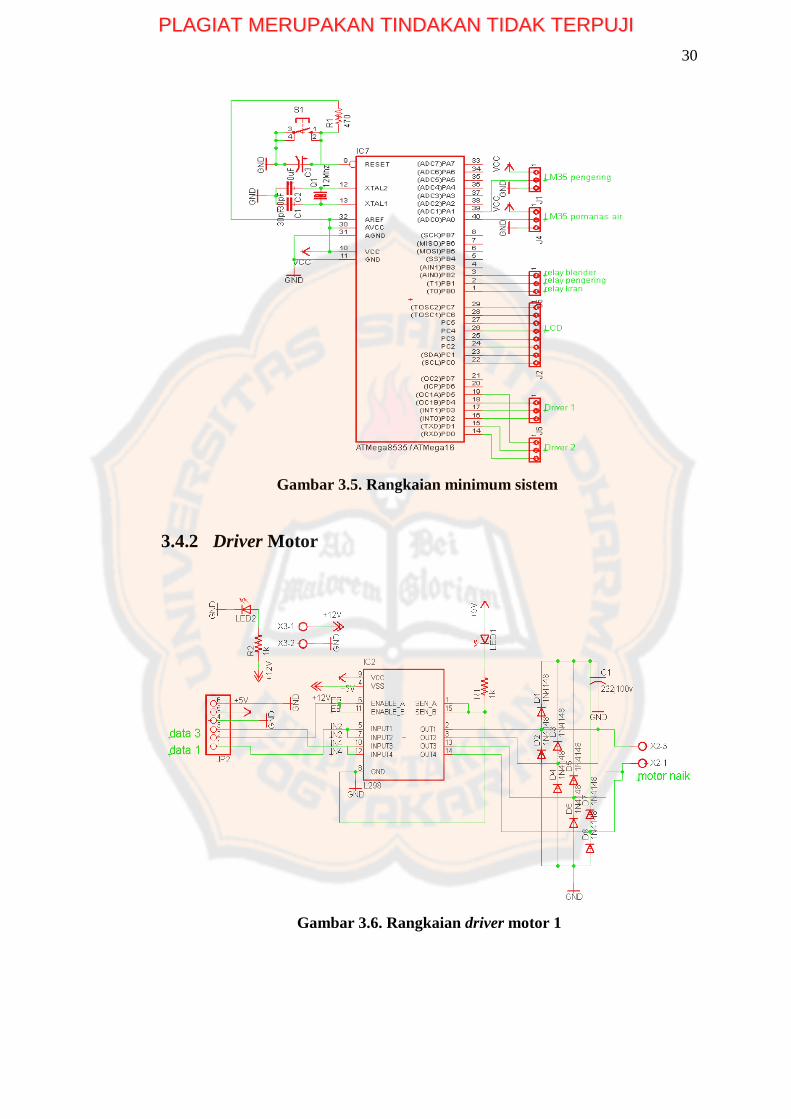
Gambar 3.6. Rangkaian driver motor 1
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

31
Gambar 3.7. Rangkaian driver motor 2
Rangkaian driver berfungsi sebagai pengendali kecepatan motor
menggunakan IC driver L298. Port-port yang digunakan sebagai pengendali
kecepatan motor adalah port D.4 dan port D.5. port D.0 - port D.3 pada
mikrokontroler digunakan sebagai komunikasi antara mikrokontroler dengan
driver. Pin enable diberi VCC 5 Volt untuk kecepatan penuh dan PWM (Pulse
Width Modulation) untuk kecepatan rotasi yang bervariasi antara 00h – 3FFh (10
bit). Motor DC membutuhkan pulsa PWM dan pengaturan OCR1A/OCR1B untuk
menentukan arah putaran motor. Pengaturan program ini bertujuan untuk
membangkitkan pulsa PWM yang digunakan untuk mengendalikan putaran motor
pada proses naik dan menuangkan blender. Modulasi PWM dilakukan dengan
cara merubah lebar pulsa dari suatu pulsa data. Untuk memperoleh lebar pulsa yang
akan digunakan pada mode fast PWM, dilakukan pengaturan register sebagai
berikut :
1. TCCR1A = 0b11100000
Bit 7:6 dan bit 4:3 merupakan pengaturan keluaran pada Pin OCR1A/OCR1B pada
mode fast PWM.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

32
2. TCCR1B = 0b00001001
Bit 4:3 dilikukan untuk menentukan mode operasi Timer/Counter1 yaitu fast PWM.
Bit 2:0 merupakan bit pengatur prescaler clock yang masuk ke dalam register
TCNT1. Clock osilator yang digunakan sama dengan clock CPU yaitu 12Mhz.
Untuk menentukan frekuensi fast PWM dapat diperoleh menggunakan persamaan
2.2 sehingga diperoleh nilai sebagai berikut :
𝑓𝑂𝐶𝑛𝑥𝑃𝑊𝑀 = 𝑓𝑐𝑙𝑘𝑖/𝑜
𝑁. (1 + 𝑇𝑂𝑃)
𝑓𝑂𝐶𝑛𝑥𝑃𝑊𝑀 = 12𝑀ℎ𝑧
256. (1 + 1024)
𝑓𝑂𝐶𝑛𝑥𝑃𝑊𝑀 = 45.73 𝐻𝑧
Penelitian ini menggunakan 2 buah IC driver L298, hal tersebut bertujuan
untuk menghindari kerusakan pada IC, rangkaian driver dapat dilihat pada gambar
3.6 dan gambar 3.7. Kapasitas arus pada IC L298 adalah 4A, sedangkan kedua
motor yang digunakan membutuhkan arus masing-masing adalah 2A.
3.4.3 Sensor LM35
Gambar 3.8. Rangkaian sensor LM35
Penelitian ini menggunakan sensor temperature LM35 yang berfungsi sebagai
pendeteksi suhu. Sensor ini akan mendeteksi suhu yang terdapat pada heater
pengering sebagai masukan ke mikrokontroler. Port yang digunakan pada
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

33
mikrokontroler ATmega8535 untuk sensor LM35 adalah port A.6 dan port A.7,
karena terdapat fungsi ADC.
Berdasarkan gambar 3.8, untuk mengaktifkan sensor dibutuhkan tegangan
input catu daya sebesar 4V sampai 20V. Pada kaki 1 dihubungkan pada supply
positif, kaki 2 sebagai output sensor, dan kaki 3 dihubungkan ke ground.
Selanjutnya output sensor dihubungkan pada portA.7. Tegangan referensi (𝑣𝑟𝑒𝑓)
dari pin AREF sebesar 5V, dengan suhu yang diukur yaitu 60 C. Resolusi yang
digunakan pada perancangan ini adalah 10 bit. Berikut perhitungan nilai ADC :
Untuk suhu 60 C, tegangan yang dihasilkan adalah 0,6 volt
Nilai ADC =𝑉𝑖𝑛𝑣𝑟𝑒𝑓
x 1024
=0,65
x 1024 = 123
Jadi, nilai ADC yang diinginkan untuk rentang suhu antara 60 C adalah 123.
3.4.4 Rangkaian Penampil ( LCD )
Gambar 3.9. Rangkaian LCD
LCD yang digunakan yaitu LCD LMB162 dengan lebar display 2 baris 16
kolom yang konfigurasinya dapat dilihat pada gambar 3.9. Pada perancangan LCD
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

34
digunakan satu buah potensiometer sebesar 10KΩ dengan fungsi untuk mengatur
contras dan backlight dari LCD. Interface LCD berfungsi untuk memudahkan dan
mempercepat pembacaan dan penulisan data dari keadaan atau status dari masing-
masing proses. Berikut penggunaan port–port pada LCD ditunjukan pada tabel 3.2.
Tabel 3.2. Penggunaan Port-Port pada LCD
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
35
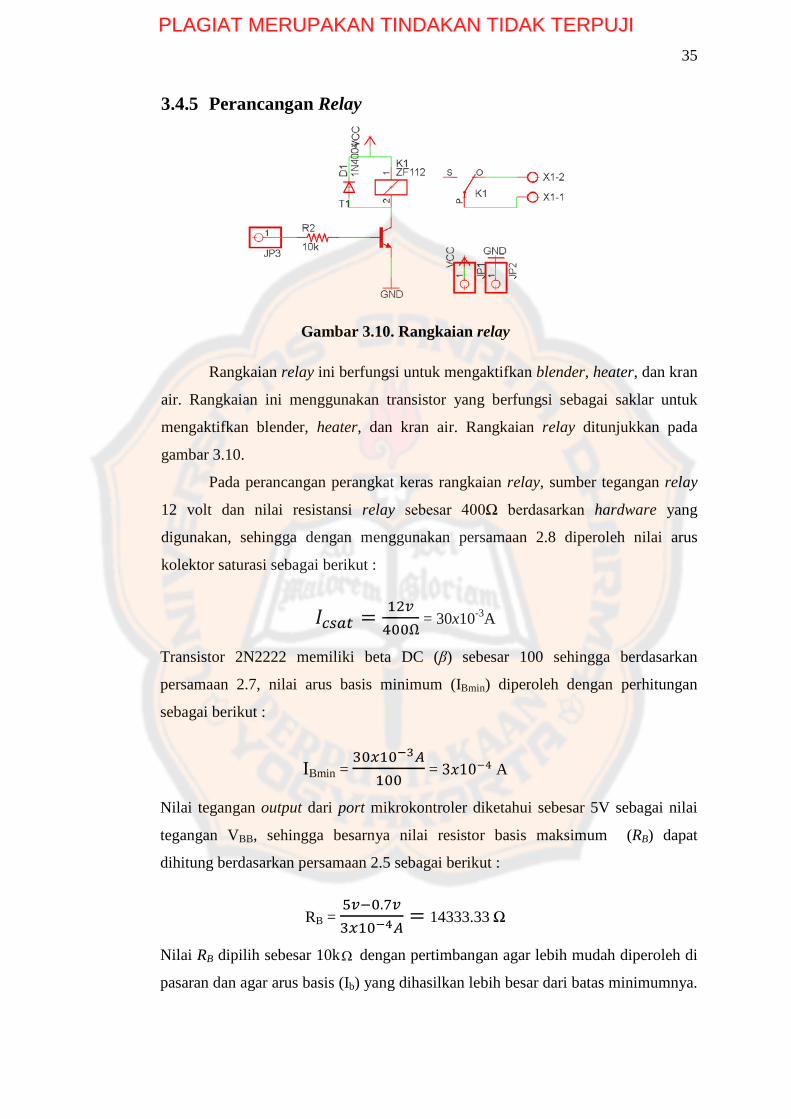
3.4.5 Perancangan Relay
Gambar 3.10. Rangkaian relay
Rangkaian relay ini berfungsi untuk mengaktifkan blender, heater, dan kran
air. Rangkaian ini menggunakan transistor yang berfungsi sebagai saklar untuk
mengaktifkan blender, heater, dan kran air. Rangkaian relay ditunjukkan pada
gambar 3.10.
Pada perancangan perangkat keras rangkaian relay, sumber tegangan relay
12 volt dan nilai resistansi relay sebesar 400Ω berdasarkan hardware yang
digunakan, sehingga dengan menggunakan persamaan 2.8 diperoleh nilai arus
kolektor saturasi sebagai berikut :
𝐼𝑐𝑠𝑎𝑡 = 12𝑣400Ω
= 30x10-3A
Transistor 2N2222 memiliki beta DC (β) sebesar 100 sehingga berdasarkan
persamaan 2.7, nilai arus basis minimum (IBmin) diperoleh dengan perhitungan
sebagai berikut :
IBmin = 30𝑥10−3𝐴
100 = 3𝑥10−4 A
Nilai tegangan output dari port mikrokontroler diketahui sebesar 5V sebagai nilai
tegangan VBB, sehingga besarnya nilai resistor basis maksimum (RB) dapat
dihitung berdasarkan persamaan 2.5 sebagai berikut :
RB = 5𝑣−0.7𝑣3𝑥10−4𝐴
= 14333.33 Ω
Nilai RB dipilih sebesar 10kΩ dengan pertimbangan agar lebih mudah diperoleh di
pasaran dan agar arus basis (Ib) yang dihasilkan lebih besar dari batas minimumnya.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

36
Oleh karena itu, nilai arus basis yang diperoleh dengan persamaan 2.5 sebagai
berikut :
IB = 5𝑣−0.7𝑣10𝑘Ω
= 4.3×10−4 A
3.5 Perancangan Perangkat Lunak
3.5.1 Flowchart Utama Start
Inisialisasi port mikrokontroler
Tombol = ON
END
YA
TIDAK
Aktifkan Tombol
Potong
Keringkan dan Panaskan Air
Gambar 3.11. Diagram alir utama
Diagram alir ditunjukkan pada gambar 3.11. Program utama menunjukkan
proses mikrokontroler secara keseluruhan. Setelah tombol di ON kan,
mikrokontroler akan melakukan proses pemotongan, kemudian proses selanjutnya
mikrokontroler akan melakukan proses pengeringan dan panaskan air. Heater
pengering dan pemanas air aktif secara bersamaan. Pemanas air akan selalu ON
dengan suhu 100 C. Setelah itu, pemanas air akan OFF, kemudian relay akan ON,
lalu kran air terbuka, maka air akan mengalir melalui kran menuju gelas lalu OFF.
Diagram alir utama dapat dilihat pada gambar 3.11.
3.5.2 Flowchart Pemotongan Diagram alir proses pemotongan ditunjukkan pada gambar 3.12. Proses ini
dipakai untuk melakukan pemotongan yang menggunakan blender. Jika tombol
start ditekan, blender akan kondisi ON selama 1 menit. Kemudian timer akan OFF
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

37
dan blender OFF. Lalu motor 1 akan berada pada kondisi ON searah jarum jam dan
motor 2 OFF. Jika limit switch 1 ON, maka motor 1 OFF dan motor 2 ON searah
jarum jam untuk menuangkan akar senggugu yang ada pada blender. Jika limit
switch 2 ON, maka motor 1 OFF dan motor 2 OFF. Kemudian motor 2 ON
berlawanan arah jarum jam untuk kembali ke posisi semula. Jika limit switch 3 ON,
maka motor 2 OFF dan motor 1 ON berlawanan dengan arah jarum jam untuk
turun ke posisi semula. Jika limit switch 4 ON, maka motor 1 OFF dan motor 2
OFF. Kemudian akan kembali ke program utama. Diagram alir pemotongan dapat
dilihat pada gambar 3.12. Mulai
Blender ON
Timer ON
Timer = 1 Menit
Timer OFFBlender OFF
Motor 1 ON(searah jarum jam)
Motor 2 OFF
Limit 1 = ON
Motor 1 OFFMotor 2 ON (searah
jarum jam)
Limit 2 = ON
Motor 1 OFFMotor 2 OFF
A
A
Motor 2 ON (searah jarum jam)
Limit 3 = ON
Motor 2 OFFMotor 1 ON(searah jarum
jam)
Limit 4 = ON
Motor 1 OFFMotor 2 OFF
Return
YA
TIDAK
TIDAK
TIDAK
YA
YA
YA
YA
TIDAK
TIDAK
Gambar 3.12. Diagram alir pemotongan
3.5.3 Flowchart Pengeringan dan Penyeduhan Diagram alir proses pemotongan dan penyeduhan ditunjukkan pada gambar
3.13. Proses pengeringan dan penyeduhan akan dikerjakan bersamaan setelah
motor 1 dan motor 2 OFF, maka heater pengering kondisi ON, pemanas air kondisi
ON dan kran kondisi OFF. Setelah heater pengering kondisi ON, pemanas air
kondisi ON dan kran kondisi OFF kemudian akan menampilkan suhu heater dan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

38
pemanas air. Jika suhu pada heater < 60°C dan suhu pemanas air < 100° C,
kemudian status akan tertampil pada LCD. Jika suhu pada heater < 60°C dan suhu
pemanas air > 100° C, maka heater pengering akan ON dan pemanas air OFF lalu
status akan tertampil pada LCD. Jika suhu pada heater > 60°C dan suhu pemanas
air < 100° C, maka heater pengering akan OFF dan pemanas air ON, kemudian
status akan tertampil pada LCD. Jika suhu pada heater > 60°C dan suhu pemanas
air > 100° C, maka pemanas air OFF dan heater pengering akan OFF, lalu status
akan tertampil pada LCD. Setelah pemanas air OFF dan heater pengering akan
OFF maka kran air akan terbuka selama 5 detik lalu kran akan OFF dan proses
selesai. Diagram alir pengeringan dan penyeduhan dapat dilihat pada gambar 3.13.
Mulai
Heater pengering ONPemanas air ON
Kran OFF
Heater pengering >60°C
Pemanas air > 100°
Pemanas air OFFHeater pengering OFF
End
Heater pengering >60°C
&Pemanas air <100°
Heater pengering OFFPemanas air ON
Heater pengering <60°C
&Pemanas air >100°
YA
TIDAK
YA
TIDAK
YA
TIDAK
Heater pengering ON
Pemanas air OFF
Buka kran
A
Tampilkan Status
Tampilkan Status
Tunda = 5 detik
Kran OFF
A
A
A
Gambar 3.13. Diagram alir pengeringan dan penyeduhan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
BAB IV
HASIL DAN PEMBAHASAN
Bab ini berisi mengenai hasil pengamatan dari alat produksi obat asma seduh berbasis
mikrokontroler ATmega8535. Hasil pengamatan berupa pengujian sensor LM35 dalam
mendeteksi suhu pada heater pengeringan, heater pemanas air dan tingkat keberhasilan
alat produksi obat asma seduh berbasis mikrokontroler ATmega8535 secara keseluruhan.
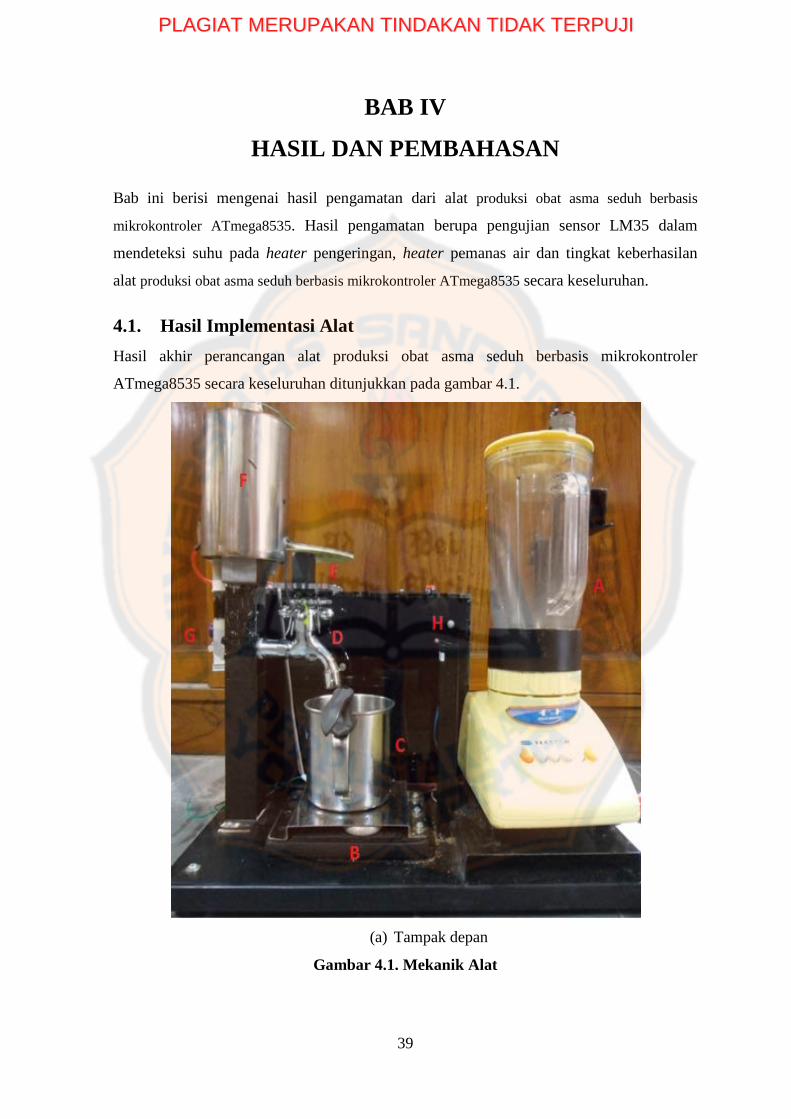
4.1. Hasil Implementasi Alat Hasil akhir perancangan alat produksi obat asma seduh berbasis mikrokontroler
ATmega8535 secara keseluruhan ditunjukkan pada gambar 4.1.
(a) Tampak depan
Gambar 4.1. Mekanik Alat
39
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

40
(b) tampak belakang
Gambar 4.1. Mekanik alat ( lanjutan)
Keterangan gambar :
a.Blender i. Motor1
b.Heater pengering j. Motor2
c.Cangkir k. Tombol start
d.Kran wastafel l. Downloader
e.Motor servo m. Tombol power
f.Tabung n. Sensor LM35
g.Penyearah 6 Volt o. LCD
h.Limit switch
Rangkaian elektronika yang terdapat sebagai pendukung bekerjanya alat produksi obat
asma seduh berbasis mikrokontroler ATmega8535 dapat dilihat pada gambar :
a. Gambar 4.2 Rangkaian Mikrokontroler
b. Gambar 4.3 Rangkaian Relay
c. Gambar 4.4 Rangkaian driver
d. Gambar 4.5 LCD
e. Gambar 4.6 Penyearah 6 Volt
f. Gambar 4.7 Kran Elektrik (Solenoid valve)
g. Gambar 4.8 Kran Wastafel
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

41
Gambar 4.2. Mikrokontroler Gambar 4.3. Relay
Gambar 4.4. Driver Gambar 4.5. LCD
Gambar 4.6. Penyearah 6 Volt Gambar 4.7. Solenoid valve
Gambar 4.8. Kran Wastafel
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

42
Rangkaian mikrokontroler pada gambar 4.2 berfungsi sebagai I/O untuk mengolah data dari
sensor LM35.
Keterangan gambar pada rangkaian mikrokontroler:
1. Output +5 volt 5. Port untuk downloader
2. Gnd 6. Port A.0 – A.7
3. Port D.0 – D.7 7. Port C.0 – C.7
4. Port B.0 – B.7 8. Input +12 volt
Relay yang dipakai pada pembuatan alat ini berjumlah 3 yang berfungsi sebagai saklar untuk
mengaktifkan blender, heater pengering, dan heater air. Gambar 4.3 menunjukkan rangkaian
relay. Untuk pengendalian kecepatan motor digunakan rangkaian driver menggunakan IC
driver L298. Rangkaian driver dapat dilihat pada gambar 4.4. LCD berfungsi untuk
menampilkan data-data yang diinginkan, antara lain kondisi motor1, motor2, data suhu heater,
kondisi kran terbuka dan tertutup. Rangkaian LCD dapat dilihat pada gambar 4.5. Penyearah 6
Volt berfungsi sebagai catu daya untuk motor servo. Penyearah 6 Volt ini menggunakan IC
LM7806 untuk menghasilkan tegangan 6 Volt. Gambar 4.6 menunjukkan rangkaian penyearah
6 Volt. Kran wastafel berfungsi sebagai media untuk keluarnya air. Kran air dapat dilihat pada
gambar 4.8.
Pada perancangan tugas akhir ini menggunakan kran elektrik (solenoid valve) seperti
ditunjukkan pada gambar 4.7. yang berfungsi sebagai media untuk keluarnya air, namun pada
hasil pembuatan tugas akhir ini penggunaan kran elektrik (solenoid valve) tidak bekerja
dengan baik karena kran elektrik membutuhkan tekanan air dan tabung yang besar supaya
kran dapat terbuka penuh dan air dapat mengalir dengan deras. Pada pembuatan tugas akhir ini
tabung yang digunakan berukuran kecil, sehingga kran elektrik tidak dapat terbuka penuh.
Oleh karena itu digunakan kran wastafel seperti pada gambar 4.8. sebagai media untuk keluar
air dengan motor servo sebagai penggerak untuk membuka dan menutup kran.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

43
4.2. Pengujian Keberhasilan Sistem
4.2.1. Pengujian Pemotongan Akar Senggugu Dengan 5 Variasi Waktu Pengujian pemotongan akar senggugu dilakukan dengan cara memvariasikan waktu
pemotongan dengan 5 keadaan untuk mendapatkan hasil potongan yang halus, yaitu dari 1
menit sampai 5 menit. Dari 5 variasi tersebut, waktu yang dibutuhkan blender untuk
memotong akar senggugu sampai halus yaitu 5 menit. Waktu keseluruhan yang dibutuhkan
oleh sistem dari proses pemotongan sampai penyeduhan adalah 19 menit 16 detik.
Tabel 4.1. menunjukkan hasil pemotongan akar senggugu dengan 5 variasi waktu.
Tabel 4.1. Hasil Pemotongan dengan 5 variasi waktu (kondisi akar kering)
Gambar 4.9. Hasil Pemotongan dengan kondisi akar yang masih segar (basah)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

44
Pemotongan akar senggugu dilakukan dengan 5 variasi waktu dan 2 kondisi akar
yang berbeda, yaitu kering dan masih segar (basah). Akar utuh yang digunakan sebelum
dipotong menjadi serbuk untuk dibuat menjadi 1 gelas seduhan yaitu 6,1 gram untuk akar
kering sepanjang 12cm dan 8,3 gram untuk akar basah sepanjang 12 cm. Berdasarkan tabel
4.1. pada menit pertama dan kedua hasil potongan akar senggugu masih sangat kasar, yaitu
masih berupa bongkahan-bongkahan akar yang belum terpotong secara sempurna. Pada
menit ketiga dan keempat hasil potongan akar sudah mulai halus, tetapi apabila diaduk, di
dalamnya masih ada sedikit bongkahan-bongkahan akar kecil. Sedangkan pada menit
kelima, hasil potongan sudah halus, kehalusan yang dimaksud adalah seperti pada serbuk
teh celup. Takaran yang digunakan untuk menghasilkan 1 gelas seduhan siap minum yaitu
4,5 gram (1 sendok makan) untuk akar kondisi kering. Berdasarkan gambar 4.9. dapat
dilihat bahwa akar yang masih basah dapat terpotong halus seperti pada serbuk teh celup,
dengan takaran yang digunakan untuk menghasilkan 1 gelas seduhan siap minum yaitu 5,1
gram (1 sendok makan) untuk akar kondisi basah yang akan diseduh dalam 1 gelas.
Persentase keberhasilan alat dalam memotong akar senggugu sampai halus secara
keseluruhan ditunjukkan pada tabel 4.1. Berdasarkan tabel 4.1. kondisi alat dalam
memotong akar sampai halus dengan hasil potongan yang diinginkan adalah seperti pada
serbuk teh celup yang dapat dilihat pada gambar 4.10.
Gambar 4.10. Serbuk hasil potongan pada teh celup vs akar senggugu
4.2.2. Pengujian pada Proses Pengeringan Pengujian pada proses pengeringan dilakukan selama 1 menit dengan suhu 30°C - 60 °C
untuk akar kering dan 3 menit untuk suhu 30°C - 120°C untuk akar segar (basah).
Penempatan sensor LM35 adalah di bawah plat stainless dengan posisi LM35 berdekatan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

45
dengan heater seperti ditunjukkan pada gambar 4.11. Hasil dari pengeringan dapat dilihat
pada gambar 4.11.
Gambar 4.11. Penempatan sensor LM35
Keterangan gambar:
a. Plat stainless
b. Sensor LM35
c. Heater
(a) akar kering (suhu 30°C -60°C) (b) akar basah(suhu 30°C -120°C)
Gambar 4.12. Serbuk hasil pengeringan
Berdasarkan gambar 4.12.(a) dapat diketahui bahwa akar senggugu yang telah dikeringkan
selama 1 menit dengan suhu 30°C -60°C telah mencapai pengeringan sesuai dengan yang
diinginkan, yaitu tidak terdapat kadar air pada serbuk dari akar senggugu. Untuk
mengetahui ada atau tidaknya kadar air pada serbuk dilakukan dengan cara memegang
sampel serbuk dari hasil pengeringan dibandingkan dengan serbuk pada teh celup. Untuk
gambar 4.12 (b) dapat diketahui bahwa akar senggugu yang telah dikeringkan selama 3
menit dengan suhu 30°C -120°C masih terdapat sedikit kadar air dikarenakan akar yang
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

46
digunakan masih segar (basah) sehingga masih banyak menyimpan kadar air. Hal ini
nantinya akan mempengaruhi hasil seduhan akar.
Tabel 4.2. Perbandingan suhu referensi (termometer) pada pengeringan terhadap
tegangan keluaran sensor serta error kenaikan tegangan per derajatnya
Gambar 4.13. Grafik suhu pengeringan pada termometer terhadap tegangan
y = 0.0099x R² = 0.9976 y = 0.0099x R² = 0.9976
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0 20 40 60 80
Vout
SE
NSO
R (V
)
Suhu pada Termometer (°C)
percobaan1
percobaan2
percobaan3
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
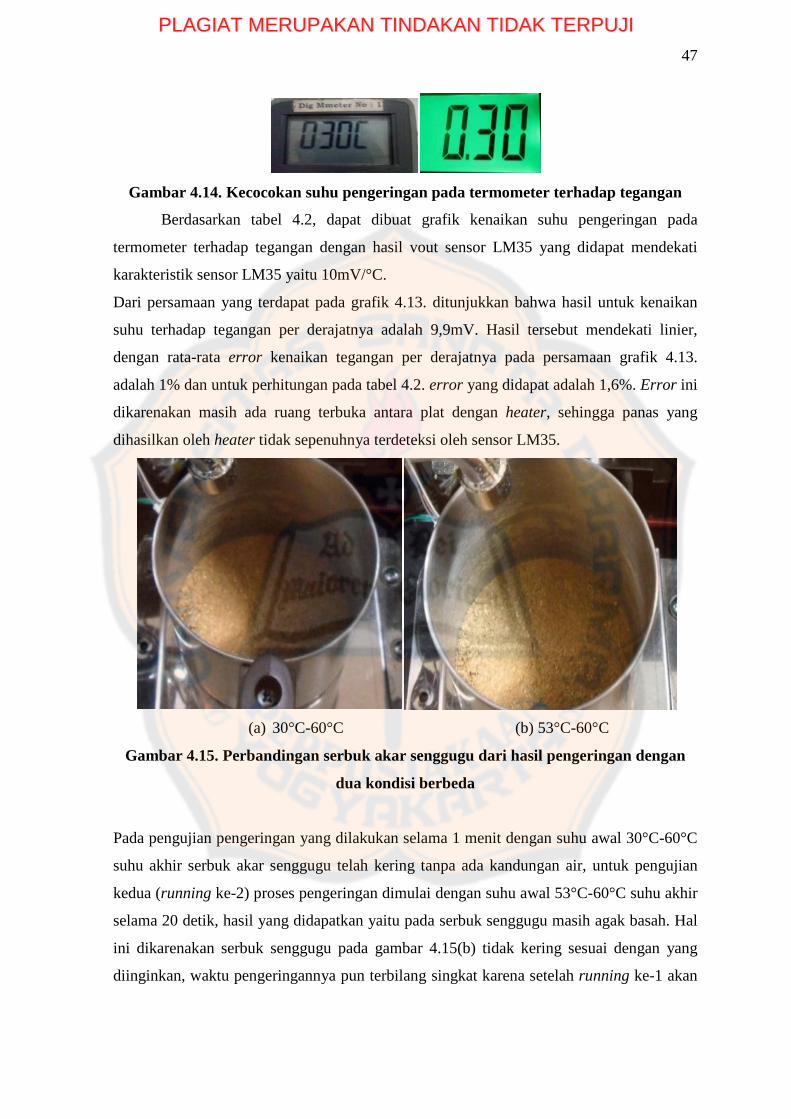
47
Gambar 4.14. Kecocokan suhu pengeringan pada termometer terhadap tegangan
Berdasarkan tabel 4.2, dapat dibuat grafik kenaikan suhu pengeringan pada
termometer terhadap tegangan dengan hasil vout sensor LM35 yang didapat mendekati
karakteristik sensor LM35 yaitu 10mV/°C.
Dari persamaan yang terdapat pada grafik 4.13. ditunjukkan bahwa hasil untuk kenaikan
suhu terhadap tegangan per derajatnya adalah 9,9mV. Hasil tersebut mendekati linier,
dengan rata-rata error kenaikan tegangan per derajatnya pada persamaan grafik 4.13.
adalah 1% dan untuk perhitungan pada tabel 4.2. error yang didapat adalah 1,6%. Error ini
dikarenakan masih ada ruang terbuka antara plat dengan heater, sehingga panas yang
dihasilkan oleh heater tidak sepenuhnya terdeteksi oleh sensor LM35.
(a) 30°C-60°C (b) 53°C-60°C
Gambar 4.15. Perbandingan serbuk akar senggugu dari hasil pengeringan dengan
dua kondisi berbeda
Pada pengujian pengeringan yang dilakukan selama 1 menit dengan suhu awal 30°C-60°C
suhu akhir serbuk akar senggugu telah kering tanpa ada kandungan air, untuk pengujian
kedua (running ke-2) proses pengeringan dimulai dengan suhu awal 53°C-60°C suhu akhir
selama 20 detik, hasil yang didapatkan yaitu pada serbuk senggugu masih agak basah. Hal
ini dikarenakan serbuk senggugu pada gambar 4.15(b) tidak kering sesuai dengan yang
diinginkan, waktu pengeringannya pun terbilang singkat karena setelah running ke-1 akan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

48
ke running ke-2, suhu pada heater belum turun menjadi suhu awal yaitu 30°C, sehingga
masih ada kandungan air pada serbuk senggugu tersebut.
4.2.3. Pengujian Pada Proses Pemanas Air Pengujian pada proses pemanasan air dilakukan selama 10 menit 48 detik dengan suhu
maksimal 100°C. Penempatan sensor LM35 adalah pada celah diatas tabung air dengan
posisi LM35 menghadap kedalam tabung seperti ditunjukan pada gambar 4.16. Hasil
seduhan akar senggugu dapat dilihat pada gambar 4.17.
Gambar 4.16. Penempatan sensor LM35 pada pemanas air
Gambar 4.17. Hasil seduhan akar senggugu
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

49
Berdasarkan gambar 4.17. dapat diketahui bahwa akar senggugu telah terseduh dengan
baik. Dapat dilihat bahwa jumlah gumpalan serbuk yang terapung relatif sedikit. Hal ini
dikarenakan air benar-benar mendidih, yaitu dengan titik didih 100°C.
Tabel 4.3. Perbandingan suhu referensi (termometer) pada pemanas air terhadap
tegangan keluaran sensor serta error kenaikan tegangan per derajatnya
Pengambilan data suhu pada termometer pada tabel 4.3. dilakukan dengan cara mencatat
suhu yang tertampil pada termometer dan mencatat tegangan keluaran sensor per kenaikan
2°C. Dari data percobaan pada tabel 4.3. dapat dilihat bahwa saat suhu air 100°C, tegangan
yang dihasilkan dari 3 percobaan berbeda-beda. Hal ini dikarenakan pada tabung masih
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

50
terdapat celah kecil, sehingga uap panas dari air atau panas air masih ada yang keluar.
Hasilnya, panas tidak sepenuhnya terdeteksi oleh sensor LM35. Disamping itu,
penempatan sensor juga mempengaruhi pembacaan sensor / sensing.
Gambar 4.18. Grafik suhu pemanas air pada termometer terhadap tegangan
Gambar 4.19. Kecocokan suhu pemanas air pada termometer terhadap tegangan
Berdasarkan tabel 4.3, dapat dibuat grafik kenaikan suhu pemanas air pada termometer
terhadap tegangan dengan hasil vout sensor LM35 yang didapat sedikit melebihi sesuai
dengan karakteristik sensor LM35 yaitu 10mV/°C.
Dari persamaan yang terdapat pada grafik 4.18. ditunjukkan bahwa hasil untuk kenaikan
suhu terhadap tegangan per derajatnya adalah 10,1mV. Hasil tersebut sedikit melebihi
linier, dengan rata-rata error kenaikan tegangan per derajatnya pada persamaan grafik 4.18
adalah 1% dan untuk perhitungan pada tabel 4.3. error yang diperoleh adalah 1,5%. Error
ini dikarenakan suhu akhir pada percobaan ke-1 dan ke-3 melebihi 100°C, sehingga
tegangan yang dihasilkan pun ikut naik. Hal inilah yang mengakibatkan kenaikan tegangan
per derajatnya tidak linier.
Gambar 4.20.(a) merupakan hasil seduhan dengan serbuk dari akar senggugu yang
dikeringkan dengan suhu 30°C-60°C. Pada hasil seduhan dengan suhu 30°C-100°C dan
dari pemanasan air menggunakan kompor dapat dilihat bahwa penyeduhan pada
permukaan air tidak tampak adanya gumpalan serbuk senggugu, dengan kata lain serbuk
telah benar-benar larut dengan air. Hasil seduhan untuk pengujian kedua (running ke-2)
y = 0.0101x R² = 0.9966
0
0.2
0.4
0.6
0.8
1
1.2
0 20 40 60 80 100 120
Vout
SE
NSO
R (V
)
Suhu pada Termometer (°C)
percobaan1 percobaan2 percobaan3
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

51
proses pemanasan air dimulai dengan suhu awal 94°C-100°C suhu akhir, hasil yang
didapatkan yaitu akar serbuk senggugu belum larut semua, masih terdapat sedikit
gumpalan serbuk pada permukaan air. Hal ini dikarenakan serbuk senggugu tidak kering
sesuai dengan yang diinginkan, waktu pemanasan air yang terbilang singkat, sehingga
serbuk senggugu tersebut tidak larut semua.
Gambar 4.20.(b) merupakan hasil seduhan dengan serbuk dari akar senggugu yang
dikeringkan dengan suhu 53°C-60°. Pada hasil seduhan dari air yang dipanaskan dengan
suhu 30°C-100°C dan pemanasan air menggunakan kompor tampak bahwa masih ada
serbuk-serbuk halus yang terapung di permukaan air. Hasil seduhan untuk suhu pemanas
air 94°C-100°C didapatkan cukup banyak serbuk senggugu yang terapung di permukaan
air dan belum larut semua. Hal ini dikarenakan waktu pengeringan yang singkat sehingga
serbuk dari akar senggugu tidak kering sesuai dengan yang diinginkan dan masih terdapat
kandungan air.
Untuk gambar 4.20 (c) dapat diketahui bahwa akar senggugu yang telah dikeringkan
selama 3 menit dengan suhu 30°C -120°C masih terdapat sedikit kadar air dikarenakan
akar yang digunakan masih segar (basah) sehingga masih banyak menyimpan kadar air.
Hal ini nantinya akan mempengaruhi hasil seduhan akar.
(a) Dikeringkan dengan suhu 30°C-60°C (b) dikeringkan dengan suhu 53°C-
60°C
Gambar 4.20. Perbandingan hasil seduhan dengan serbuk akar senggugu yang
dikeringkan dengan suhu 30°C-60°C, 53°C-60°C, dan 30°C-120°C
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

52
(c) dikeringkan dengan suhu 3°C-60°C
(lanjutan)Gambar 4.20. Perbandingan hasil seduhan dengan serbuk akar senggugu
yang dikeringkan dengan suhu 30°C-60°C, 53°C-60°C, dan 30°C-120°C
Untuk mekanik, masih mempunyai kekurangan pada proses penuangan serbuk dari akar
senggugu tidak tertumpah 100% dikarenakan besi penyangga motor1 kurang tinggi dan
saat motor2 kembali (CCW) dengan kecepatan diatur 3FF akan berputar kencang,
akibatnya blender yang dipasang pada poros motor2 menyentuh ujung limit switch4 terlalu
kuat dan ujung limit switch4 menjadi bengkok, sehingga posisi blender tidak dapat berdiri
tegak. Kekurangan saat motor2 kembali ditunjukkan pada gambar 4.21.
Posisi salah Posisi benar
Gambar 4.21. Kekurangan saat motor2 kembali
4.3. Pengujian Relay Pengujian rangkaian relay dilakukan dengan cara memberikan logika high atau 5 volt pada
portB.0, portB.1, dan portB.2. Tujuan dari pengujian ini adalah untuk mengetahui fungsi
transistor sebagai saklar. Sebagai contoh, jika portB.0 diberi logika high, maka transistor
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

53
akan aktif dan sebaliknya, jika portB.0 diberi logika low, maka transistor tidak aktif. Hasil
pengujian relay ditunjukkan pada tabel 4.4.
Berdasarkan tabel 4.4. hasil pengujian rangkaian relay telah sesuai dengan yang di
harapkan, relay akan aktif dan blender ON pada saat portB.0 diberi logika high dan
sebaliknya tidak aktif saat diberi logika low. Jika portB.1 diberi logika high maka relay
akan aktif, pemanas air akan ON. Jika portB.2 diberi logika high maka relay akan aktif
dan heater pengering akan ON.
Tabel 4.4. Hasil pengujian relay
4.4. Pengujian Rangkaian Driver Pengujian rangkaian driver dilakukan dengan cara memberikan nilai duty cycle pada
portD.4 dan portD.5 yang berfungsi sebagai PWM pada mikrokontroler. Hasil pengujian
rangkaian driver ditunjukkan pada Tabel 4.5.
Tabel 4.5. Hasil pengujian rangkaian driver
Pada perancangan ini, nilai duty cycle yang dipakai adalah 100%, dikarenakan beban yang
akan diangkat berat. Jika menggunakan duty cycle 25% dan 50%, pada motor1 blender
tidak dapat terangkat, dan pada motor 2, saat tuang jika akan kembali lagi ke posisi semula
blender tidak dapat terangkat. Hasil pengujian rangkaian driver mendekati teori yang
sebenarnya. Perbedaan tegangan dikarenakan suplai yang digunakan tidak tepat 12V yaitu
11,35V dan 11,62V. Perbedaan tegangan yang terjadi tidak mempengaruhi kerja sistem
secara keseluruhan. Rangkaian driver yang dibuat dapat bekerja dengan baik. Rangkaian
ini dapat berfungsi untuk mengontrol putaran motor ke kanan atau ke kiri pada motor1 dan
motor2.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

54
4.5. Pengujian Rangkaian Penyearah 6 Volt Pengujian rangkaian penyearah 6 volt dilakukan dengan cara mengukur tegangan output
penyearah menggunakan multimeter. Tabel 4.6 menunjukkan hasil pengujian tegangan
output penyearah tanpa beban dan menggunakan beban.
Tabel 4.6. Hasil pengujian tegangan output penyearah 6 Volt
Berdasarkan tabel 4.6. hasil pengukuran tegangan output rangkaian penyearah 6 volt
memiliki perbedaan dengan tegangan output pada saat tidak diberi beban dan pada saat
diberi beban. Tegangan output dari komponen IC LM7806 tanpa beban adalah 6,11 volt,
tetapi pada saat diberi beban hasil pengujian terukur adalah 5,63 volt. Beban yang
digunakan adalah 1 buah motor servo. Untuk penyearah 6 volt terdapat error sebesar:
𝐸𝑟𝑟𝑜𝑟
=𝑇𝑒𝑔𝑎𝑛𝑔𝑎𝑛 𝑜𝑢𝑡𝑝𝑢𝑡 𝑡𝑎𝑛𝑝𝑎 𝑏𝑒𝑏𝑎𝑛 − 𝑇𝑒𝑔𝑎𝑛𝑔𝑎𝑛 𝑜𝑢𝑡𝑝𝑢𝑡 𝑑𝑒𝑛𝑔𝑎𝑛 𝑏𝑒𝑏𝑎𝑛
𝑇𝑒𝑔𝑎𝑛𝑔𝑎𝑛 𝑜𝑢𝑡𝑝𝑢𝑡 𝑡𝑎𝑛𝑝𝑎 𝑏𝑒𝑏𝑎𝑛𝑥100%
𝐸𝑟𝑟𝑜𝑟 =6 − 5,63
6𝑥100%
= 6,57%
Berdasarkan perhitungan error yang dilakukan pada penyearah 6 volt, diperoleh nilai error
sebesar 6,57%. Hal tersebut tidak mempengaruhi kinerja sistem secara keseluruhan dan
kinerja mikrokontroler dikarenakan tegangan kerja dari mikrokontroler berkisar 4,5 – 5,5
volt.
4.6. Pembahasan Software
4.6.1. Program Utama Listing program utama dan instruksi yang digunakan dapat dilihat pada Gambar 4.22.
Program ini akan dieksekusi pada saat user menekan tombol start. Pada saat tombol start
ditekan, maka portD.6 pada mikrokontroler akan berlogika high. Output dari portD.6
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

55
tersebut akan berfungsi sebagai tegangan input mikrokontroler untuk memulai proses
secara keseluruhan.
Setelah portD.6 berlogika high, maka pada LCD tertampil tulisan “loading…”
setelah itu mikrokontroler akan melakukan proses pemotongan. Jika user tidak menekan
tombol, maka program tidak dapat dieksekusi, pada LCD akan tertampil tulisan “Tekan
tombol start”. Gambar 4.22. menunjukan listing program utama.
Gambar 4.22. Listing Program Utama
Gambar 4.23. Tampilan kondisi sebelum tombol di tekan
4.6.2. Program pemotongan
Program pemotongan ini akan di eksekusi setelah tombol start ditekan kemudian portB.0
akan berlogika high yang menandakan relay yang terhubung pada blender dalam kondisi
ON dan kemudian timer akan aktif selama 300 detik (5menit). Setelah itu relay akan OFF
dan proses pemotongan akan selesai. Gambar 4.24. menunjukan listing program
pemotongan.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

56
Gambar 4.24. Listing Program Pemotongan
Gambar 4.25. Tampilan proses pemotongan setelah di eksekusi
4.6.3. Pengaturan motor dc Pengaturan motor dc akan dieksekusi setelah proses pemotongan selesai. Motor 1 akan ON
bergerak naik (cw) sampai menyentuh limit2 yang terhubung pada portB.5, dan motor1
akan OFF. Setelah motor1 OFF, maka motor2 akan ON memutar kekanan (cw) untuk
menuangkan akar senggugu pada blender ke dalam gelas sampai menyentuh limit4 yang
terhubung pada portB.7, kemudian motor akan berputar berlawanan arah jarum jam (ccw)
untuk kembali pada posisi semula sampai menyentuh limit3 yang terhubung pada portB.6.
Setelah blender menyentuh limit3, motor1 akan turun (ccw) sampai menyentuh limit1 yang
terhubung pada portB.4 lalu motor1 akan OFF. Gambar 4.26. menunjukan listing program
pengaturan motor DC.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

57
Gambar 4.26. Listing Program Pengaturan Motor DC
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

58
5. 6.
7.
8.
9.
10.
11.
12.
13.
Gambar 4.27. Motor1 naik Gambar 4.28. Motor2 naik (tuang)
Gambar 4.29. Motor1 kembali
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

59
4.6.4. Program pengeringan dan pemanasan air Pada perancangan ini semula program untuk pengeringan dan panaskan air akan
dieksekusi akan dikerjakan bersamaan setelah motor 1 dan motor 2 OFF, maka heater
pengering kondisi ON, pemanas air kondisi ON dan kran kondisi OFF. Setelah heater
pengering kondisi ON, pemanas air kondisi ON dan kran kondisi OFF kemudian akan
menampilkan suhu heater dan pemanas air. Jika suhu pada heater pengering < 60°C dan
suhu pemanas air < 100° C, kemudian status akan tertampil pada LCD. Jika suhu pada
heater < 60°C dan suhu pemanas air > 100° C, maka heater pengering akan ON dan
pemanas air OFF lalu status akan tertampil pada LCD. Jika suhu pada heater > 60°C dan
suhu pemanas air < 100° C, maka heater pengering akan OFF dan pemanas air ON,
kemudian status akan tertampil pada LCD. Jika suhu pada heater > 60°C dan suhu
pemanas air > 100° C, maka pemanas air OFF dan heater pengering akan OFF, lalu status
akan tertampil pada LCD. Setelah pemanas air OFF dan heater pengering akan OFF maka
kran air akan terbuka selama 5 detik lalu kran akan OFF dan proses selesai. Namun
program tersebut dinilai kurang efektif karena memerlukan kontrol dua subsistem yang
berulang, yaitu pada saat pengeringan telah selesai dan pemanas air ON, pengering harus
memgecek suhu apakah msh 60°C atau tidak, jika tidak maka heater pengering harus ON
lagi supaya suhu pengering tidak turun. Proses tersebut membutuhkan waktu lama dalam
operasionalnya. Oleh karena itu digunakan program sederhana yang lebih efektif, yaitu
program pengeringan dan panaskan air akan dieksekusi setelah proses pengaturan motor
DC selesai atau setelah motor1 menyentuh limit1. Proses pengeringan akan berlangsung
ketika portB.2 yang terhubung pada relay heater berlogika high, heater akan ON sampai
suhu 60°C selama 1 menit lalu OFF.
Setelah proses pengeringan selesai, relay pemanas air yang terhubung pada portB.1 akan
ON sampai suhu 100°C. Proses ini akan berlangsung selama 10 menit 48 detik. Untuk
proses pengaturan suhu menggunakan fungsi ADC yang terdapat pada portA.6 dan
portA.7 mikrokontroler. Gambar 4.30. menunjukan listing program pengeringan dan
pemanasan air.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

60
Gambar 4.30. Listing Program Pengeringan Dan Pemanasan Air
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

61
Gambar 4.31. Tampilan suhu proses pengeringan dan pemanasan air pada LCD
4.6.5.Program pergerakan kran air Listing program pergerakan kran air ditunjukkan pada gambar 4.32. Pada saat
fungsi ini dieksekusi, mikrokontroler akan memberikan logika high pada motor servo
untuk menggerakkan kran air.
Gambar 4.32. Listing program pengendali motor servo
Gambar 4.33. Kran air ON Gambar 4.34. Kran air OFF
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
62
Program ini akan dieksekusi setelah pemanas air OFF. Untuk membuka kran air
dipergunakan 1 buah motor servo. Motor servo akan bergerak dengan sudut 90° pada saat
mikrokontroler memberikan pulsa sebesar 2ms, kran air akan terbuka selama 30 detik
setelah itu kran air akan menutup kembali dan proses selesai.
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan Dari hasil percobaan dan pengujian alat produksi obat asma seduh berbasis
mikrokontroler ATmega8535 dapat disimpulkan bahwa:
1. Sistem yang dirancang telah bekerja dengan baik dengan waktu yang dibutuhkan
oleh sistem dari proses pemotongan sampai penyeduhan adalah 19 menit 16 detik.
2. Waktu yang dibutuhkan blender untuk memotong akar senggugu sampai halus
adalah 5 menit.
3. Proses pengeringan serbuk dari akar senggugu dengan suhu 30°C-60°C dan 53°C-
60°C mempengaruhi hasil penyeduhan. Hasil pengeringan yang lebih baik yaitu
pengeringan yang dilakukan dengan suhu 30°C-60°C.
4. Kenaikan tegangan sensor LM35 pada hasil percobaan dibandingkan dengan
datasheet per derajatnya memiliki error 1%.
5. Mekanik masih mempunyai kekurangan dalam penuangan serbuk senggugu ke
dalam gelas.
5.2. Saran Saran untuk pengembangan alat produksi obat asma seduh berbasis mikrokontroler
ATmega8535 adalah sebagai berikut :
1. Membuat mekanisme alat untuk proses penuangan dengan sedemikian rupa supaya
penuangan dapat berjalan dengan lancar.
2. Sebelum melakukan running ke-2 hendaknya batasan suhu pada pengering dan
pemanas air ditambah lalu di program ulang supaya tidak ada kadar air pada serbuk
senggugu sehingga saat diseduh, serbuk benar-benar larut.
.
62
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

DAFTAR PUSTAKA
[1] http://www.iptek.net.id/ind/pd_tanobat/view.php?id=157, diakses tanggal 1
September 2012.
[2] Winoto, Ardi, 2008, Mikrokontroler AVR ATmega8/32/16/8535, Bandung :
Informatika.
[3] Adrianto, Heri,2008, Pemrograman Mikrokontroler AVR ATmega16
menggunakan Bahasa C (CodeVision AVR), Bandung : Informatika.
[4] Boleystad, Robert and Nashelsky Englewood Cliffs, Electronic Devices
and Circuit Theory, New Jersey, 1996
[5] http://wahyu-rudiyan.blogspot.com/2011/05/driver-motor-l293d-
l298.html, diakses tanggal 15 Agustus 2012.
[6] http://telinks.wordpress.com/2010/04/09/rangkaian-sensor-suhu-lm35.html,
diakses tanggal 25 Oktober 2012.
[7] http://meriwardana.blogspot.com/2011/11/prinsip-kerja-motor-arus-searah-
dc.html, diakses tanggal 15 Agustus 2012.
[8] http://meriwardana.blogspot.com/2011/11/prinsip-kerja-relay.html, diakses
tanggal 1 September 2012.
[9] http://elektronika-dasar.com/komponen/limit-switch-dan-saklar-push-on/,
diakses tanggal 5 September 2012.
[10] http://elektronika-dasar.com/teori-elektronika/motor-servo.html,diakses
tanggal 4 Januari 2013.
[11] http://aryutomo.wordpress.com/2010/12/10/pengatur-tegangan-voltage-
regulator/, diakses tanggal 4 Januari 2013.
[12] http://ndolem.blogspot.com/2012/08/cara-menghitung-nilai-resistor-
pada.html, diakses tanggal 1 Januari 2013.
63
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L1
Lampiran Tabel Hasil Pengujian Alat Tabel L1. Hasil pengujian sensor pada proses pengeringan
Suhu pada Termometer
(°C)
SUHU PADA LCD (°C) Vout SENSOR (V)
1 2 3 1 2 3
30 30 30 30 0.3 0.3 0.3 35 34 34 35 0.34 0.35 0.35 39 38 38 39 0.39 0.38 0.38 43 42 42 41 0.42 0.42 0.42 47 46 46 47 0.47 0.46 0.46 51 50 50 51 0.51 0.5 0.51 55 54 54 55 0.54 0.55 0.55 59 58 58 57 0.58 0.59 0.59 60 60 60 59 0.6 0.6 0.6
Tabel L2. Hasil pengujian sensor pada proses pemanas air
Suhu pada Termometer
(°C)
SUHU PADA LCD (°C) Vout SENSOR (V)
1 2 3 1 2 3
30 30 30 30 0.3 0.3 0.3 32 32 32 32 0.32 0.32 0.32 34 34 34 34 0.34 0.34 0.33 36 36 36 36 0.36 0.36 0.36 38 38 38 38 0.38 0.38 0.38 40 40 40 40 0.4 0.4 0.4 42 42 42 42 0.42 0.42 0.42 44 44 44 44 0.44 0.44 0.44 46 46 46 46 0.46 0.46 0.46 48 48 48 48 0.48 0.48 0.49 50 50 50 50 0.5 0.5 0.5 52 52 52 52 0.52 0.52 0.52 54 54 54 54 0.54 0.54 0.54 56 56 56 56 0.56 0.56 0.55 58 58 58 58 0.58 0.58 0.58 60 60 60 60 0.6 0.6 0.6 62 62 62 62 0.62 0.62 0.62 64 64 64 65 0.64 0.64 0.64 66 66 66 66 0.66 0.66 0.66 68 68 68 68 0.68 0.68 0.68 70 70 70 70 0.7 0.7 0.69 72 72 72 72 0.72 0.72 0.72 74 73 74 74 0.74 0.74 0.74
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L2
Tabel L2. (Lanjutan) Hasil pengujian sensor pada proses pemanas air
Suhu pada Termometer
(°C)
SUHU PADA LCD (°C) Vout SENSOR (V)
1 2 3 1 2 3
76 76 75 76 0.76 0.76 0.76 78 78 76 78 0.78 0.78 0.78 80 80 77 80 0.8 0.8 0.81 82 82 82 81 0.82 0.82 0.82 84 82 84 84 0.84 0.84 0.84 86 85 86 86 0.86 0.86 0.86 88 88 86 88 0.88 0.89 0.89 90 90 90 91 0.9 0.91 0.91 92 92 91 92 0.92 0.92 0.92 94 94 94 94 0.94 0.94 0.94 96 95 96 97 0.96 0.97 0.97 99 99 98 98 0.98 0.99 0.99 100 100 100 107 1.01 1.00 1.07
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L3
Listing Program
L.3.Listing Program Keseluruhan
/*****************************************************
This program was produced by the
CodeWizardAVR V1.25.8 Professional
Automatic Program Generator
© Copyright 1998-2007 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project : PRODUKSI OBAT SEDUH BERBASIS MIKROKONTROLER ATmega8535
Version : 2012
Date : 30/11/2012
Author : F4CG
Company : F4CG
Comments:
Chip type : ATmega8535
Program type : Application
Clock frequency : 12,000000 MHz
Memory model : Small
External SRAM size : 0
Data Stack size : 128
*****************************************************/
#include <mega8535.h>
#include <stdio.h>
// Alphanumeric LCD Module functions
#asm
.equ __lcd_port=0x15 ;PORTC
#endasm
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L4
#include <lcd.h>
#define UCOK PORTD
#define Servo PORTD.7
unsigned int a,z,x=0,i,Timer,SUHU_HEATER,SUHU_AIR;
unsigned char dataServo=0,baris[16],baris1[16];
float ADC_HEATER,ADC_AIR;
// Timer 0 overflow interrupt service routine
interrupt [TIM0_OVF] void timer0_ovf_isr(void)
// Reinitialize Timer 0 value
TCNT0=0x8A;
// Place your code here
if(i==100)
Timer++;
i=0;
else
i++;
#include <delay.h>
#define ADC_VREF_TYPE 0x00
// Read the AD conversion result
unsigned int read_adc(unsigned char adc_input)
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L5
// Delay needed for the stabilization of the ADC input voltage
delay_us(10);
// Start the AD conversion
ADCSRA|=0x40;
// Wait for the AD conversion to complete
while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10;
return ADCW;
// Declare your global variables here
void WAKTU(void)
//Menampilkan Data Timer Pada LCD
sprintf(baris1,"Timer = %d",Timer) ;lcd_gotoxy(0,0) ;lcd_puts(baris1);
void TAMPIL_SUHU_HEATER(void)
sprintf(baris,"Suhu Heater = %d",SUHU_HEATER) ;lcd_gotoxy(0,1) ;lcd_puts(baris);
void TAMPIL_SUHU_AIR(void)
sprintf(baris1,"Suhu Air = %d",SUHU_AIR) ;lcd_gotoxy(0,1) ;lcd_puts(baris1);
void MOTOR_STOP(void)
UCOK =0b0000;
OCR1B=0x00;
OCR1A=0x00;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L6
void MOTOR1_CW(void)
UCOK =0b00000001;
OCR1B=0x3ff;
OCR1A=0x3ff;
void MOTOR2_CCW(void)
UCOK =0b00000100;
OCR1B=0x3ff;
OCR1A=0x3ff;
void MOTOR1_CCW(void)
UCOK =0b00000010;
OCR1B=0x3ff;
OCR1A=0x3ff;
void MOTOR2_CW(void)
UCOK =0b00001000;
OCR1B=0x200;
OCR1A=0x200;
void CEK_SUHU_HEATER(void)
ADC_HEATER=read_adc(7);
SUHU_HEATER=(float)ADC_HEATER*500/1023;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L7
void CEK_SUHU_AIR(void)
ADC_AIR=read_adc(6);
SUHU_AIR=(float)ADC_AIR*500/1023;
void KERINGKAN(void)
PORTB.2=1; //Heater Pengering ON
lcd_clear();
lcd_gotoxy(0,0);
lcd_putsf("Pengering ON");
delay_ms(500);
while(1)
if (SUHU_HEATER>=60)//aslinya 60
PORTB.2=0; //Heater Pengering OFF
PORTB.1=1; //Pemanas Air ON
lcd_gotoxy(0,0);
lcd_putsf("Pengering OFF");
delay_ms(500);
lcd_clear();
while(1)
lcd_gotoxy(0,0);
lcd_putsf("Pemanas Air ON");
if(SUHU_AIR>=100) //aslinya >=100
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L8
PORTB.1=0; //Pemanas Air OFF
lcd_clear();
lcd_gotoxy(0,1);
lcd_putsf("KRAN AIR ON");
Timer=0;
while(1)
if(Timer>=10) //Aslinya 5
for(z=0;z<=5;z++)
PORTD.7=1; //memberikan pulsa high
delay_ms(2); //pulsa servo high diberikan selama 2 ms sudut 90 kran tutup
PORTD.7=0;
delay_ms(20);
//delay_ms(500);
lcd_gotoxy(0,0);
lcd_putsf("KRAN AIR OFF");
delay_ms(500);
lcd_gotoxy(0,0);
lcd_putsf("PROSES SELESAI");
delay_ms(1000);
goto out;
else
PORTB.1=0; //Pemanas Air OFF
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L9
PORTD.7=1; //memberikan pulsa high
delay_ms(1); //pulsa servo high diberikan selama 2 ms sudut 90 kran buka
PORTD.7=0;
delay_ms(20);
WAKTU();
else
PORTB.1=1; //Pemanas Air ON
CEK_SUHU_AIR();
TAMPIL_SUHU_AIR();
delay_ms(500);
else
CEK_SUHU_HEATER();
TAMPIL_SUHU_HEATER();
delay_ms(500);
out:
lcd_clear();
void POTONG(void)
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L10
lcd_clear();
Timer=0; //Timer ON
PORTB.0=1; //Blender ON
while(1)
if(Timer>=300)// aslinya(potong selama 300 detik)
lcd_clear();
lcd_gotoxy(3,0);
lcd_putsf("PEMOTONGAN");
lcd_gotoxy(5,1);
lcd_putsf("SELESAI");
Timer=0; //Timer OFF
PORTB.0=0; //Blender OFF
delay_ms(1000);
lcd_clear();
while(1)
if(PINB.5==0) //Limit 2
lcd_clear();
while(1)
if(PINB.7==0) //Limit 4
lcd_clear();
MOTOR_STOP(); //Motor 2 Stop
Timer=0; //Timer ON
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
L11
while(1)
if(Timer>=10) //aslinya 5
if(PINB.6==0) //Limit 3
MOTOR_STOP(); //MOTOR2 Stop
lcd_clear();
while(1)
if(PINB.4==0) //Limit 1
MOTOR_STOP(); //Motor 1 Stop
lcd_clear();
goto out; //Proses Pemotongan Selesai
else
lcd_gotoxy(0,0);
lcd_putsf("MOTOR1 KEMBALI");
MOTOR1_CCW();
else
lcd_gotoxy(0,0);
lcd_putsf("MOTOR2 KEMBALI");
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L12
MOTOR2_CCW();
else
WAKTU(); //Tampilkan Waktu
else
lcd_gotoxy(0,0);
lcd_putsf("MOTOR2 TUANG");
MOTOR_STOP(); //Motor 1 Stop
MOTOR2_CW(); //Motor 2 ON
else
lcd_gotoxy(0,0);
lcd_putsf("MOTOR1 NAIK");
MOTOR1_CW(); //Motor 1 ON
else
WAKTU(); //Tampilkan Waktu
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L13
lcd_gotoxy(3,1);
lcd_putsf("PEMOTONGAN");
out:
void START(void)
lcd_clear();
while(1)
POTONG();
delay_ms(1000);
lcd_clear();
KERINGKAN();
lcd_clear();
goto out;
out: //Semua Proses Selesai
void main(void)
// Declare your local variables here
// Input/Output Ports initialization
// Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L14
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTB=0b11110000;
DDRB=0b00001111; //PortB 7-0
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTC=0x00;
DDRC=0x00; //LCD
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTD=0x00;
DDRD=0xFF;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: 11,719 kHz
// Mode: Normal top=FFh
// OC0 output: Disconnected
TCCR0=0x05;
TCNT0=0x8A;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L15
OCR0=0x00;
TCCR1A=0xa3;
TCCR1B=0x0b;
TCNT1=0x0000;//000016 bit
OCR1A=0x03ff;
OCR1B=0x03ff;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: 1500.000 kHz
// Mode: Normal top=FFh
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
MCUCR=0x00;
MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x01;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L16
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
// ADC initialization
// ADC Clock frequency: 750,000 kHz
// ADC Voltage Reference: AREF pin
// ADC High Speed Mode: Off
// ADC Auto Trigger Source: Free Running
ADMUX=ADC_VREF_TYPE & 0xff;
ADCSRA=0xA4;
SFIOR&=0x0F;
// LCD module initialization
lcd_init(16);
// Global enable interrupts
#asm("sei")
PORTD.7=1; //memberikan pulsa high
delay_ms(2); //pulsa servo high diberikan selama 2 ms sudut 90 kran tutup
PORTD.7=0;
delay_ms(20);
lcd_gotoxy(3,0);
lcd_putsf("MASUKAN");
lcd_gotoxy(3,1);
lcd_putsf("AKAR SENGGUGU");
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI

L17
delay_ms(1000);
lcd_clear();
while (1)
// Place your code here
if(PIND.6==1) //Tombol Start Di Tekan
lcd_clear();
lcd_gotoxy(3,0);
lcd_putsf("LOADING...");
delay_ms(500);
lcd_clear();
START();
else
lcd_gotoxy(2,0);
lcd_putsf("TEKAN TOMBOL");
lcd_gotoxy(5,1);
lcd_putsf("START");
;
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI
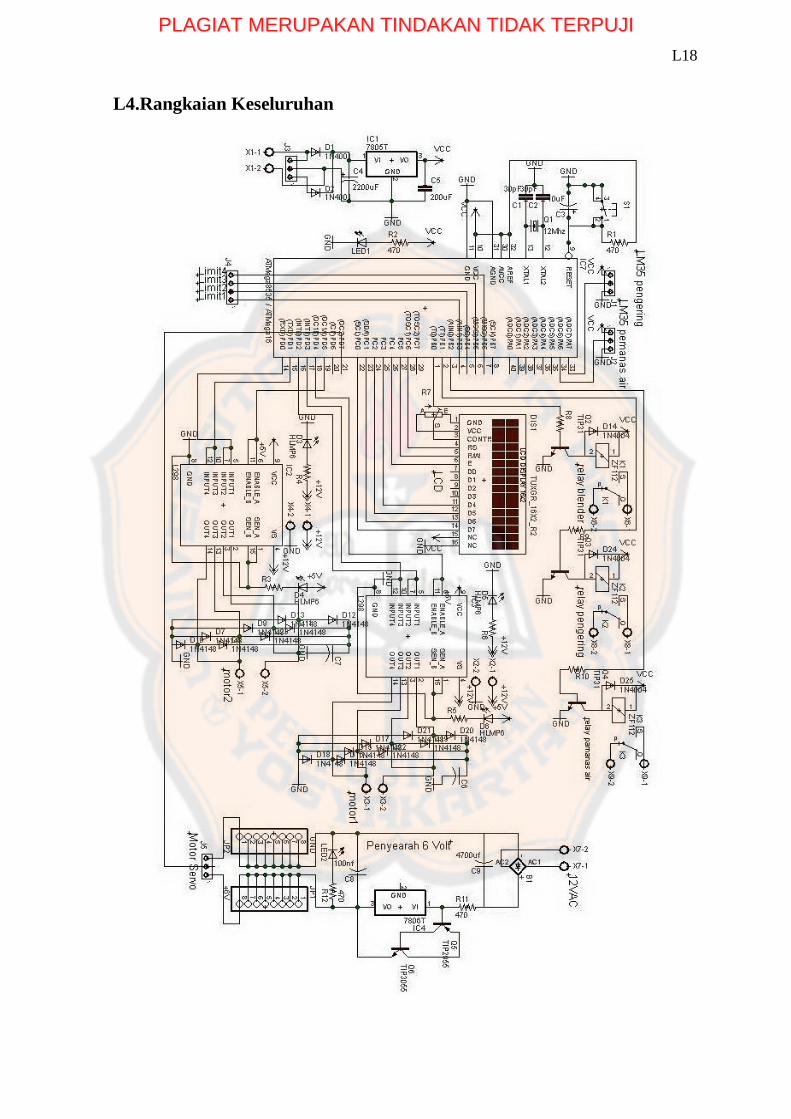
L18
L4.Rangkaian Keseluruhan
PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJIPLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI




















